
自動分析装置
【課題】振動等によって試薬容器設置機構の停止位置に誤差が生じた場合でも、試薬容器を毎回正確な位置に架設する。
【解決手段】試薬を収容する試薬容器と、該試薬容器を保持する試薬容器保持機構と、該試薬容器保持機構を試薬容器待機位置から試薬容器架設位置へ移送する試薬容器移送機構と、を備え、前記試薬容器保持機構が、前記試薬容器架設位置に正しく位置づけられたときに、少なくとも一部が契合する契合部材を、該試薬容器架設位置、及び試薬容器保持機構、または試薬容器自体に、備えた自動分析装置。
【解決手段】試薬を収容する試薬容器と、該試薬容器を保持する試薬容器保持機構と、該試薬容器保持機構を試薬容器待機位置から試薬容器架設位置へ移送する試薬容器移送機構と、を備え、前記試薬容器保持機構が、前記試薬容器架設位置に正しく位置づけられたときに、少なくとも一部が契合する契合部材を、該試薬容器架設位置、及び試薬容器保持機構、または試薬容器自体に、備えた自動分析装置。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、血液,尿などの生体サンプルに含まれる各種成分の定性・定量分析を行う自動分析装置に係り、特に試薬容器の搬送・架設を自動で行うことができる自動分析装置に関する。
【背景技術】
【0002】
自動分析の分野では、複数の反応ラインをランダムに使用するランダムアクセス方式の自動分析装置が開発され、分析の処理能力が飛躍的に向上した。それにともない試薬消費のスピードも速くなり、試薬容器切り替え作業の機会が増えてきた。これに対し、特許文献1には、試薬登録,試薬交換等の作業によるオペレータの負担を軽減すると共に、分析中の試薬不足を発生させず、分析中断を最小化するため、自動で試薬交換を行うことができる試薬搬入搬出機構を有する自動分析装置が示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−037171号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に示される自動分析装置では、試薬容器の搬入搬出に伴い、試薬容器設置機構が試薬容器を試薬架設位置に架設するときの位置決めを、駆動系を制御することで行っているので、駆動系の移動分解能の範囲内で位置決め精度が決まっている。しかしこれでは、振動等の要因によって試薬容器設置機構の停止位置に裕度以上の誤差が生じてしまった場合に、試薬容器が架設されず、装置の停止を招く可能性がある。
【0005】
本発明の目的は、振動等によって試薬容器設置機構の停止位置に誤差が生じた場合でも、試薬容器を毎回正確な位置に架設することにある。
【課題を解決するための手段】
【0006】
上記目的を達成するための構成は以下の通りである。
複数の反応容器に試料と試薬を分注して反応させ、反応した液体を測定する自動分析装置において、
試薬を収容した試薬容器を保持し架設することができる試薬容器設置機構と、
該試薬容器設置機構を試薬容器移動待機位置から試薬容器架設位置への試薬容器の搬入、及び試薬容器架設位置から試薬容器排出位置への搬出を行う試薬容器搬入搬出機構と、を備え、
試薬容器設置機構もしくはそれに保持される試薬容器自体が、試薬容器架設位置近傍と少なくとも一部を契合することで試薬架設位置への位置決めを行える位置決め機構を有することを特徴とする。
【0007】
位置決め機構は、試薬容器設置機構もしくはそれに保持される試薬容器自体が、試薬容器架設位置近傍と少なくとも一部を契合して位置決めできるものの組み合わせであれば、それぞれどのようなものでも良い。例えば、試薬容器設置機構に付随するピンと試薬容器架設位置近傍に設置された穴の組み合わせや、試薬容器とそれをガイドする試薬容器架設位置上部に設置された傾斜付きの板の組み合わせ等が想定される。
【発明の効果】
【0008】
振動等によって試薬容器設置機構が多少ずれた位置に停止したとしても、位置決め機構により、試薬容器設置機構もしくはそれに保持される試薬容器自体が試薬容器架設位置近傍と少なくとも一部を契合することで、試薬容器を架設することが可能である。
【図面の簡単な説明】
【0009】
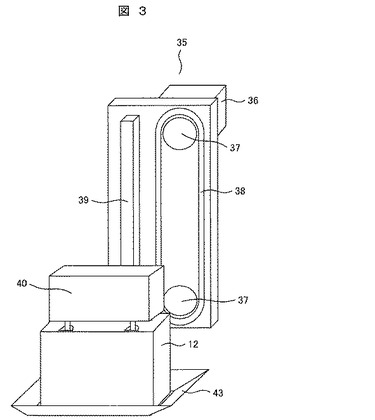
【図1】本発明の自動分析装置の平面図。
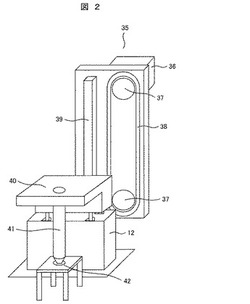
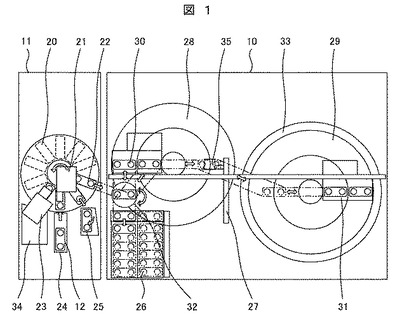
【図2】試薬容器設置機構及びピンと穴による位置決め機構の詳細図。
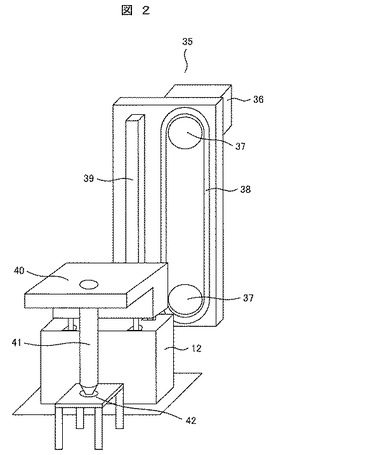
【図3】試薬容器設置機構及び傾斜付きの板による位置決め機構の詳細図。
【発明を実施するための形態】
【0010】
以下、図面を用いて本発明の実施の形態を説明する。
【0011】
図1は、本発明が適用された自動分析装置の一実施例の概略構成図である。以下、試薬容器12の搬送手順を詳細に説明する。試薬投入機構24から投入された試薬容器12は、試薬情報読取り機構21により、試薬容器12に添付されたRFIDタグを読み取られた後、補充用試薬保管庫20に保管される。試薬保管庫A28もしくはB29へ試薬を補充するように、制御部から合図があると、試薬容器12は試薬キャップ開栓機構23の下まで回転して移動し、その試薬キャップを開けられる。このとき、試薬キャップは試薬キャップ廃棄箱34に廃棄される。さらに試薬容器12は、試薬受け渡し機構22のポジションまで回転して移動し、試薬回転機構32まで押し出される。
【0012】
試薬回転機構32では、試薬容器12を受け取ったことをセンサで検知した後、回転する。試薬搬送機構27は、試薬回転機構32上に試薬容器設置機構35を移動させた後、試薬回転機構32上の試薬容器12を試薬容器設置機構35で保持し、試薬投入口A30もしくはB31の上まで試薬容器12を搬送する。そこから試薬容器設置機構35をZ方向(自動分析装置の上下方向)に移動させ、試薬容器12を試薬保管庫A28もしくはB29内に架設する。
【0013】
空になった試薬容器12は、試薬保管庫A28もしくはB29から試薬容器設置機構35で吊り上げられて取り出され、試薬排出収納機構26まで搬送される。
【0014】
空になった試薬保管庫A28もしくはB29内のポジションに架設するための試薬容器12は、適切なタイミングで試薬回転機構32に押し出されてきて試薬投入口まで搬送され、架設される、ということを繰り返す。
【0015】
次に図2,図3を用いて位置決め機構によりどのように位置決めされるかの例を説明する。
【0016】
図2は試薬容器設置機構35及びピン41と穴42による位置決め機構の詳細図である。試薬容器設置機構35はモータ36を備えており、このモータ36及びプーリ37,37により、ベルト38が2つのプーリ37間を往復運動する。このベルト38の往復運動方向は、Z方向である。また、ベルト38には試薬容器保持機構40が取り付けられており、さらに試薬容器保持機構40はリニアガイドにも取り付けられている。これにより、ベルト38の移動に伴って、試薬容器保持機構40はZ方向にブレなく移動可能となっている。また、ピン41は試薬容器設置機構35に付き、穴42は試薬保管庫上の試薬架設位置近傍に位置する。
【0017】
試薬搬送機構27が試薬架設位置の上まで試薬容器設置機構35及び試薬容器12を移動させた後、モータ36によるベルト38の運動によって、ピン41と穴42が接触する直前までZ方向に試薬容器12が下ろされる。そこで一旦停止し、XY方向のモータの励磁を切った後、Z方向にさらに試薬容器12が下ろされる。XY方向のモータの励磁が切れていることにより、ピン41もしくは穴42に施してある面取りにならってピン41と穴42が接触し、試薬容器が正しい位置に架設される。ピン41と穴42の寸法差により停止位置精度が決まるので、非常に高精度の位置決めが可能となる。
【0018】
図3は試薬容器設置機構35及び傾斜付き板43による位置決め機構の詳細図である。傾斜付き板43は試薬容器架設位置上部に付く。試薬容器12は、この傾斜付き板43と接しながら下降されることにより、正しい位置に架設される。これも試薬容器12と傾斜付き板43が接触する直前までZ方向に試薬容器12を下ろした後、XY方向のモータの励磁を切る必要がある。
【符号の説明】
【0019】
10 分析ユニット
11 バッファユニット
12 試薬容器
20 補充用試薬保管庫
21 試薬情報読取り機構
22 試薬受け渡し機構
23 試薬キャップ開栓機構
24 試薬投入機構
25 試薬排出機構
26 試薬排出収納機構
27 試薬搬送機構
28 試薬保管庫A
29 試薬保管庫B
30 試薬投入口A
31 試薬投入口B
32 試薬回転機構
33 反応機構
34 試薬キャップ廃棄箱
35 試薬容器設置機構
36 モータ
37 プーリ
38 ベルト
39 リニアガイド
40 試薬容器保持機構
41 ピン
42 穴
43 傾斜付き板
【技術分野】
【0001】
本発明は、血液,尿などの生体サンプルに含まれる各種成分の定性・定量分析を行う自動分析装置に係り、特に試薬容器の搬送・架設を自動で行うことができる自動分析装置に関する。
【背景技術】
【0002】
自動分析の分野では、複数の反応ラインをランダムに使用するランダムアクセス方式の自動分析装置が開発され、分析の処理能力が飛躍的に向上した。それにともない試薬消費のスピードも速くなり、試薬容器切り替え作業の機会が増えてきた。これに対し、特許文献1には、試薬登録,試薬交換等の作業によるオペレータの負担を軽減すると共に、分析中の試薬不足を発生させず、分析中断を最小化するため、自動で試薬交換を行うことができる試薬搬入搬出機構を有する自動分析装置が示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−037171号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に示される自動分析装置では、試薬容器の搬入搬出に伴い、試薬容器設置機構が試薬容器を試薬架設位置に架設するときの位置決めを、駆動系を制御することで行っているので、駆動系の移動分解能の範囲内で位置決め精度が決まっている。しかしこれでは、振動等の要因によって試薬容器設置機構の停止位置に裕度以上の誤差が生じてしまった場合に、試薬容器が架設されず、装置の停止を招く可能性がある。
【0005】
本発明の目的は、振動等によって試薬容器設置機構の停止位置に誤差が生じた場合でも、試薬容器を毎回正確な位置に架設することにある。
【課題を解決するための手段】
【0006】
上記目的を達成するための構成は以下の通りである。
複数の反応容器に試料と試薬を分注して反応させ、反応した液体を測定する自動分析装置において、
試薬を収容した試薬容器を保持し架設することができる試薬容器設置機構と、
該試薬容器設置機構を試薬容器移動待機位置から試薬容器架設位置への試薬容器の搬入、及び試薬容器架設位置から試薬容器排出位置への搬出を行う試薬容器搬入搬出機構と、を備え、
試薬容器設置機構もしくはそれに保持される試薬容器自体が、試薬容器架設位置近傍と少なくとも一部を契合することで試薬架設位置への位置決めを行える位置決め機構を有することを特徴とする。
【0007】
位置決め機構は、試薬容器設置機構もしくはそれに保持される試薬容器自体が、試薬容器架設位置近傍と少なくとも一部を契合して位置決めできるものの組み合わせであれば、それぞれどのようなものでも良い。例えば、試薬容器設置機構に付随するピンと試薬容器架設位置近傍に設置された穴の組み合わせや、試薬容器とそれをガイドする試薬容器架設位置上部に設置された傾斜付きの板の組み合わせ等が想定される。
【発明の効果】
【0008】
振動等によって試薬容器設置機構が多少ずれた位置に停止したとしても、位置決め機構により、試薬容器設置機構もしくはそれに保持される試薬容器自体が試薬容器架設位置近傍と少なくとも一部を契合することで、試薬容器を架設することが可能である。
【図面の簡単な説明】
【0009】
【図1】本発明の自動分析装置の平面図。
【図2】試薬容器設置機構及びピンと穴による位置決め機構の詳細図。
【図3】試薬容器設置機構及び傾斜付きの板による位置決め機構の詳細図。
【発明を実施するための形態】
【0010】
以下、図面を用いて本発明の実施の形態を説明する。
【0011】
図1は、本発明が適用された自動分析装置の一実施例の概略構成図である。以下、試薬容器12の搬送手順を詳細に説明する。試薬投入機構24から投入された試薬容器12は、試薬情報読取り機構21により、試薬容器12に添付されたRFIDタグを読み取られた後、補充用試薬保管庫20に保管される。試薬保管庫A28もしくはB29へ試薬を補充するように、制御部から合図があると、試薬容器12は試薬キャップ開栓機構23の下まで回転して移動し、その試薬キャップを開けられる。このとき、試薬キャップは試薬キャップ廃棄箱34に廃棄される。さらに試薬容器12は、試薬受け渡し機構22のポジションまで回転して移動し、試薬回転機構32まで押し出される。
【0012】
試薬回転機構32では、試薬容器12を受け取ったことをセンサで検知した後、回転する。試薬搬送機構27は、試薬回転機構32上に試薬容器設置機構35を移動させた後、試薬回転機構32上の試薬容器12を試薬容器設置機構35で保持し、試薬投入口A30もしくはB31の上まで試薬容器12を搬送する。そこから試薬容器設置機構35をZ方向(自動分析装置の上下方向)に移動させ、試薬容器12を試薬保管庫A28もしくはB29内に架設する。
【0013】
空になった試薬容器12は、試薬保管庫A28もしくはB29から試薬容器設置機構35で吊り上げられて取り出され、試薬排出収納機構26まで搬送される。
【0014】
空になった試薬保管庫A28もしくはB29内のポジションに架設するための試薬容器12は、適切なタイミングで試薬回転機構32に押し出されてきて試薬投入口まで搬送され、架設される、ということを繰り返す。
【0015】
次に図2,図3を用いて位置決め機構によりどのように位置決めされるかの例を説明する。
【0016】
図2は試薬容器設置機構35及びピン41と穴42による位置決め機構の詳細図である。試薬容器設置機構35はモータ36を備えており、このモータ36及びプーリ37,37により、ベルト38が2つのプーリ37間を往復運動する。このベルト38の往復運動方向は、Z方向である。また、ベルト38には試薬容器保持機構40が取り付けられており、さらに試薬容器保持機構40はリニアガイドにも取り付けられている。これにより、ベルト38の移動に伴って、試薬容器保持機構40はZ方向にブレなく移動可能となっている。また、ピン41は試薬容器設置機構35に付き、穴42は試薬保管庫上の試薬架設位置近傍に位置する。
【0017】
試薬搬送機構27が試薬架設位置の上まで試薬容器設置機構35及び試薬容器12を移動させた後、モータ36によるベルト38の運動によって、ピン41と穴42が接触する直前までZ方向に試薬容器12が下ろされる。そこで一旦停止し、XY方向のモータの励磁を切った後、Z方向にさらに試薬容器12が下ろされる。XY方向のモータの励磁が切れていることにより、ピン41もしくは穴42に施してある面取りにならってピン41と穴42が接触し、試薬容器が正しい位置に架設される。ピン41と穴42の寸法差により停止位置精度が決まるので、非常に高精度の位置決めが可能となる。
【0018】
図3は試薬容器設置機構35及び傾斜付き板43による位置決め機構の詳細図である。傾斜付き板43は試薬容器架設位置上部に付く。試薬容器12は、この傾斜付き板43と接しながら下降されることにより、正しい位置に架設される。これも試薬容器12と傾斜付き板43が接触する直前までZ方向に試薬容器12を下ろした後、XY方向のモータの励磁を切る必要がある。
【符号の説明】
【0019】
10 分析ユニット
11 バッファユニット
12 試薬容器
20 補充用試薬保管庫
21 試薬情報読取り機構
22 試薬受け渡し機構
23 試薬キャップ開栓機構
24 試薬投入機構
25 試薬排出機構
26 試薬排出収納機構
27 試薬搬送機構
28 試薬保管庫A
29 試薬保管庫B
30 試薬投入口A
31 試薬投入口B
32 試薬回転機構
33 反応機構
34 試薬キャップ廃棄箱
35 試薬容器設置機構
36 モータ
37 プーリ
38 ベルト
39 リニアガイド
40 試薬容器保持機構
41 ピン
42 穴
43 傾斜付き板
【特許請求の範囲】
【請求項1】
試薬を収容する試薬容器と、
該試薬容器を保持する試薬容器保持機構と、
該試薬容器保持機構を試薬容器待機位置から試薬容器架設位置へ移送する試薬容器移送機構と、を備え、
前記試薬容器保持機構が、前記試薬容器架設位置に正しく位置づけられたときに、少なくとも一部が契合する契合部材を、該試薬容器架設位置、及び試薬容器保持機構、または試薬容器自体に、備えたことを特徴とする自動分析装置。
【請求項2】
請求項1記載の自動分析装置において、
前記契合部材は、一方が、先端が細くなるようなテーパーを備えた棒状部材であり、他方が該棒状部材が嵌め合わされる穴であることを特徴とする自動分析装置。
【請求項3】
請求項1記載の自動分析装置において、
前記試薬容器保持機構は一本の搬送路上を動き、該搬送路に沿って複数の前記試薬容器架設位置を備えたことを特徴とする自動分析装置。
【請求項1】
試薬を収容する試薬容器と、
該試薬容器を保持する試薬容器保持機構と、
該試薬容器保持機構を試薬容器待機位置から試薬容器架設位置へ移送する試薬容器移送機構と、を備え、
前記試薬容器保持機構が、前記試薬容器架設位置に正しく位置づけられたときに、少なくとも一部が契合する契合部材を、該試薬容器架設位置、及び試薬容器保持機構、または試薬容器自体に、備えたことを特徴とする自動分析装置。
【請求項2】
請求項1記載の自動分析装置において、
前記契合部材は、一方が、先端が細くなるようなテーパーを備えた棒状部材であり、他方が該棒状部材が嵌め合わされる穴であることを特徴とする自動分析装置。
【請求項3】
請求項1記載の自動分析装置において、
前記試薬容器保持機構は一本の搬送路上を動き、該搬送路に沿って複数の前記試薬容器架設位置を備えたことを特徴とする自動分析装置。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2012−21776(P2012−21776A)
【公開日】平成24年2月2日(2012.2.2)
【国際特許分類】
【出願番号】特願2010−157432(P2010−157432)
【出願日】平成22年7月12日(2010.7.12)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
【公開日】平成24年2月2日(2012.2.2)
【国際特許分類】
【出願日】平成22年7月12日(2010.7.12)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
[ Back to top ]