
自動分析装置
【課題】移動ユニットが所望の位置に移動したか否かを正確に判定することで、従来に比して安定した自動分析処理を実行することができる自動分析装置を提供すること。
【解決手段】それぞれが試薬を格納する複数の試薬容器と、複数の反応容器と、複数の試薬容器の中から選択された試薬容器から試薬を吸引する吸引処理と、複数の反応容器の中から選択された反応容器に吐出する吐出処理と、を実行する試薬アームと、吸引処理が実行される第1の位置と、吐出処理が実行される第2の位置と、試薬アームのプローブを洗浄する場合の洗浄位置に対応する第3の位置と、試薬アームの基準位置としての第4の位置と、の間において、供給される駆動信号に応答して試薬アームを所定の位置に移動ユニットとして移動させる移動機構と、移動機構による試薬アームの移動が行われた後、試薬アームが第1の位置、第2の位置、第3の位置、第4の位置のいずれかに移動したか否かを判定する判定ユニットと、を具備する。
【解決手段】それぞれが試薬を格納する複数の試薬容器と、複数の反応容器と、複数の試薬容器の中から選択された試薬容器から試薬を吸引する吸引処理と、複数の反応容器の中から選択された反応容器に吐出する吐出処理と、を実行する試薬アームと、吸引処理が実行される第1の位置と、吐出処理が実行される第2の位置と、試薬アームのプローブを洗浄する場合の洗浄位置に対応する第3の位置と、試薬アームの基準位置としての第4の位置と、の間において、供給される駆動信号に応答して試薬アームを所定の位置に移動ユニットとして移動させる移動機構と、移動機構による試薬アームの移動が行われた後、試薬アームが第1の位置、第2の位置、第3の位置、第4の位置のいずれかに移動したか否かを判定する判定ユニットと、を具備する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば分注アーム等に代表される移動機構について位置確認を行うための機能を有する自動分析装置に関する。
【背景技術】
【0002】
自動分析装置(「検体検査装置」とも呼ばれる)とは、血液や尿に含まれる成分の濃度、あるいは活性値などを、検査試薬との化学反応を利用して光学的、電気的に測定する手順を自動化した装置である。この自動分析装置により同時に大量の分析、調査が可能であり、病院、検査機関等において広く利用され作業性の向上に大きく貢献している。
【0003】
このような自動分析装置においては、例えば試薬アーム、分注アーム、試薬ディスク、サンプルディスク等といった移動ユニットがある。これらの移動ユニットは、移動機構からの移動制御、位置決め制御に従って可動範囲内に原点となる位置(原点位置)と処理位置との間を移動しながら、所定の処理を実行する。例えば、試薬アームであれば、まず、試薬アームの動作前に原点出し動作を行って可動範囲内に原点位置が設定される。次に、所定のパルス数を加えて移動機構のモータを動作させることで、試薬アームを当該原点位置から試薬吸引位置、反応管の試薬分注位置、試薬プローブの洗浄位置等の各処理位置に移動させる。このとき、原点位置の他に各移動位置を直接検出するためのセンサが必要に応じて用意される。試薬アームを試薬吸引位置・反応管の試薬分注位置・試薬プローブの洗浄位置のそれぞれに移動させながら、センサにより各位置の検出を実行し、所望の位置を検出したときに試薬アームを停止する。これらの移動制御、位置決め制御により、試薬アームを可動範囲内の所望の位置に移動させることができる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平7−241097号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
従来の自動分析装置において、パルスモータなどによって移動ユニットを移動させる場合、ミスパルス、障害物へのぶつかり、トルク不足による脱調などで、モータを動かすパルス数と実際のモータの移動量に食い違いが発生する場合がある。係る場合には、移動ユニットを正規の位置に移動させることができず、適切な自動分析処理を実行することができない。この様な問題を解消するために、モータにエンコーダをつけてモータへのパルス数と実際のモータの回転量をフィードバックする方法が提案されている。しかしながら、モータ軸とプーリ間に機械的なズレが発生したり、ベルトの歯飛びが発生した場合には、パルス数とモータの回転量は等しいため、エンコーダを用いる方法では、ズレを検知できない場合が起こり得る。
【0006】
また、各処理位置に位置決め用のセンサをもたせた場合であっても、センサが部品の移動を検知したポイントに対して、可動部品の微細なガタなどで検知ポイントがわずかにズレると、検知ポイントにてセンサが誤ったON・OFF動作をするチャタリングが発生する可能性がある。係る誤動作防止のためには、検知ポイントから数パルス送ってセンサが確実にONする位置を位置決めポイントとする必要があるが、調整に手間がかかるという問題がある。
【0007】
上記事情を鑑みてなされたもので、移動ユニットが所望の位置に移動したか否かを正確に判定することで、従来に比して安定した自動分析処理を実行することができる自動分析装置を提供することを目的としている。
【課題を解決するための手段】
【0008】
一実施形態に係る自動分析装置は、それぞれが試薬を格納する複数の試薬容器と、複数の反応容器と、前記複数の試薬容器の中から選択された試薬容器から前記試薬を吸引する吸引処理と、前記複数の反応容器の中から選択された反応容器に吐出する吐出処理と、を実行する試薬アームと、前記吸引処理が実行される第1の位置と、前記吐出処理が実行される第2の位置と、前記試薬アームのプローブを洗浄する場合の洗浄位置に対応する第3の位置と、前記試薬アームの基準位置としての第4の位置と、の間において、供給される駆動信号に応答して前記試薬アームを所定の位置に移動ユニットとして移動させる移動機構と、前記移動機構による前記試薬アームの移動が行われた後、前記試薬アームが前記第1の位置、前記第2の位置、前記第3の位置、前記第4の位置のいずれかに移動したか否かを判定する判定ユニットと、を具備する自動分析装置である。
【図面の簡単な説明】
【0009】
【図1】図1は、本実施形態に係る自動分析装置1の構成を説明するための図である。
【図2】図2は、検出機構の一例として、水平方向に沿って直線移動(X軸方向に沿った一次元移動)する試薬アーム72用の検出機構を示している
【図3】図3は、移動ユニット位置確認処理の流れを示すフローチャートである。
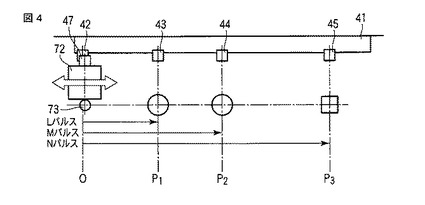
【図4】図4は、移動ユニット位置確認処理における各処理の内容を説明するための図である。
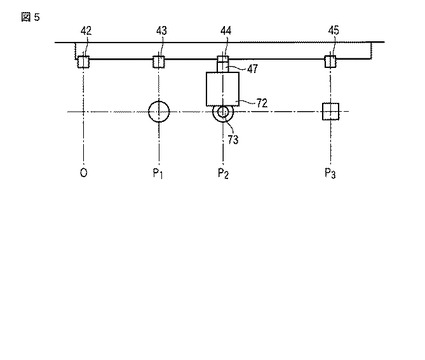
【図5】図5は、移動ユニット位置確認処理における各処理の内容を説明するための図である。
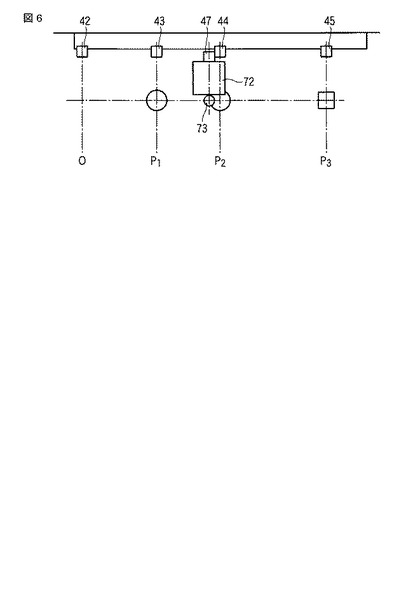
【図6】図6は、移動ユニット位置確認処理における各処理の内容を説明するための図である。
【発明を実施するための形態】
【0010】
以下、第1実施形態を図面に従って説明する。なお、以下の説明において、略同一の機能及び構成を有する構成要素については、同一符号を付し、重複説明は必要な場合にのみ行う。
【0011】
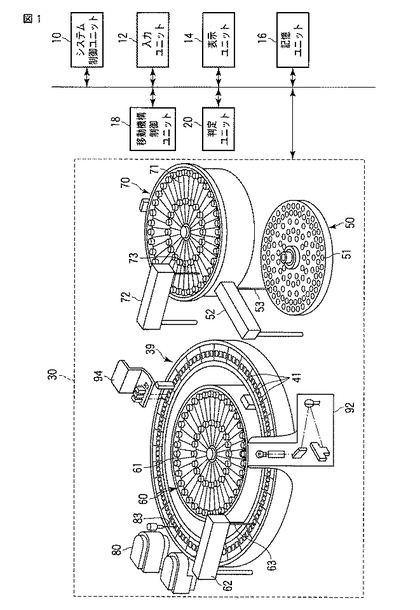
図1は、本実施形態に係る自動分析装置1の構成を説明するための図である。同図に示す様に、本自動分析装置1は、システム制御ユニット10、入力ユニット12、表示ユニット14、記憶ユニット16、移動機構制御ユニット18、判定ユニット20、分析機構30、検出機構40(図1には図示せず。図2等参照)を具備している。
【0012】
システム制御ユニット10は、情報処理装置(計算機)としての機能を持ち、本本自動分析装置の動作を制御する。システム制御ユニット10は、記憶ユニット16から後述する移動ユニット位置確認機能を実現するための動作プログラム、各種計算処理を実行するための専用プログラムを読み出して各種処理に関する演算・制御等を実行する。
【0013】
入力ユニット12は、オペレータからの各種指令や情報入力を受け付ける。入力ユニット12としては、マウスやトラックボールなどのポインティングデバイス、スイッチボタン等の選択デバイス、あるいはキーボード等の入力デバイスが適宜利用可能である。
【0014】
表示ユニット14は、例えばCRTディスプレイや、液晶ディスプレイ、有機ELディスプレイ、プラズマディスプレイ等の表示デバイスを有する。表示ユニット14は、後述する測定処理の設定画面や分析結果を表示する。
【0015】
記憶ユニット16は、設定された測定対象項目、測定対象試薬、非測定対象項目、非測定対象試薬の識別情報を記憶する。また、記憶ユニット16は、測定項目パラメータや、測定結果、分析結果、試薬残量等も適宜記憶する。さらに、記憶ユニット16は、後述する移動ユニット位置確認機能を実行するための動作プログラム等を記憶している。
【0016】
移動機構制御ユニット18は、システム制御ユニット10からの制御に従って、移動ユニットをモータによって可動範囲内を移動させる。なお、移動機構制御ユニット18が有するモータの種類には拘泥されない。本実施形態においては、当該移動機構制御ユニット18はパルスモータを有する場合を例とする。しかしながら、後述する移動ユニット位置確認機能は、モータの種類に拘泥されるものではなく、例えばサーボモータを用いても実現可能である。
【0017】
判定ユニット20は、後述する移動ユニット位置確認機能に従う処理(移動ユニット位置確認処理)おいて、移動ユニットに設けられた検出機構(後述)からの検出信号に基づいて、移動ユニットが所望の位置に移動したか否かを判定する。
【0018】
分析機構30は、図1に示すように、移動ユニットとして、サンプルアーム52、第1試薬アーム62、第2試薬アーム72、撹拌アーム80、洗浄ユニット94、反応ディスク39、サンプルディスク50、第1試薬庫60、第2試薬庫70を備える。サンプルアーム52、第1試薬アーム62、第2試薬アーム72は、「分注アーム」と呼ばれることもある。以下、各移動ユニットを含む各構成要素の構造、機能、動作について詳しく説明する。
【0019】
反応ディスク39は、円周上に配列された複数の反応管41を保持する。反応ディスク39は、ある一定のサイクルで回動と停止とを繰り返す。
【0020】
サンプルディスク50は、反応ディスク39の近傍に配置されている。サンプルディスク50は、サンプルが収容されたサンプル容器51を保持する。サンプルディスク50は、特定の反応管41が所定のサンプル吸入位置に位置決めされるように回動する。
【0021】
第1試薬庫60は、反応ディスク39の内側に配置される。第1試薬庫60は、サンプルの各測定項目に選択的に反応する第1試薬が収容された複数の第1試薬容器61を保持する。第1試薬庫60は、特定の第1試薬容器61が所定の第1試薬吸入位置に位置決めされるように回動する。
【0022】
第2試薬庫70は、反応ディスク39の近傍に配置される。第2試薬庫70は、第1試薬に対応する第2試薬が収容された複数の第2試薬容器71を保持する。第2試薬庫70は、特定の第2試薬容器71が所定の第2試薬吸入位置に位置決めされるように回動する。
【0023】
反応ディスク39とサンプルディスク50との間にはサンプルアーム52が配置される。サンプルアーム52の先端には、サンプルプローブ53が取り付けられている。サンプルアーム52は、サンプルプローブ53を、サンプルディスク50上のサンプル吸入位置に移動する。そして、サンプルプローブ53は、サンプル吸入位置に配置されたサンプル容器41内へ下降し、液面を検知すると、さらに所定量だけ下降してサンプル容器51内のサンプルを所定量だけ吸入する。サンプルプローブ53は、サンプルを吸入し終わると上昇する。サンプルプローブ53が上昇し終わると、サンプルアーム52は回動して、サンプルプローブ53を、反応ディスク39のサンプル吐出位置へ移動させる。その後、サンプルプローブ53は、サンプル吐出位置に配置された反応管41に、吸入したサンプルを所定量だけ吐出する。サンプルは、測定対象項目毎に反応管41へ分注される。
【0024】
反応ディスク39の外周近傍には第1試薬アーム62が配置される。第1試薬アーム62の先端には第1試薬プローブ63が取り付けられている。第1試薬アーム62は、第1試薬プローブを上下動及び回動可能に保持する。第1試薬プローブ63は、第1試薬アーム62により、第1試薬庫60上の試薬吸入位置に移動される。
【0025】
反応ディスク39と第2試薬庫70との間には第2試薬アーム72が配置される。第2試薬アーム72の先端には第2試薬プローブ73が取り付けられている。第2試薬アーム62は、第2試薬プローブを上下動及び回動可能に保持する。第2試薬プローブ73は、第2試薬アーム72により、第2試薬庫70上の第2試薬吸入位置上に移動される。
【0026】
反応ディスク39の外周近傍には、撹拌アーム80が配置される。撹拌アーム80の先端には撹拌子83が取り付けられている。撹拌子83は、反応ディスク39上の撹拌位置に配置された反応管41内のサンプルと試薬とを撹拌する。サンプルと試薬とが撹拌されることにより、サンプルと試薬との化学反応が促進する。
【0027】
反応ディスク39には、測光部92が設けられている。測光部92は、発光体により反応ディスク39の測光位置にある反応管41に光を照射する。反応管41は、測光位置に照射されている光を横切るように反応ディスク39により回動される。測光部92は、反応管41内の混合液の透過光の光量を測定する。測定された光量は、図示しない分析部に送信され、サンプルの測定対象項目について分析される。
【0028】
反応ディスク39の外周近傍には、洗浄ユニット94が配置され、洗浄ユニット94には、複数本の洗浄ノズルと、乾燥ノズルが取り付けられている。洗浄ユニット94は、反応ディスク39の洗浄位置にある反応管41を洗浄ノズルにより洗浄し、乾燥ノズルにより乾燥する。
【0029】
なお、反応ディスク39に設けられる少なくとも一つの反応容器は、必要に応じて、試薬プローブ63,73、サンプルプローブ53を洗浄するための洗浄ブールとして用いられる。しかしながら、当該構成に限定する趣旨ではなく、専用の洗浄プールを別途設けるようにしてもよい。
【0030】
検出機構40は、移動制御によって移動ユニットの移動が完了するタイミング等において、移動ユニットが現実に所望の位置に移動したか否かを検出する。
【0031】
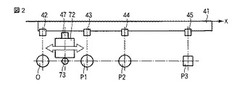
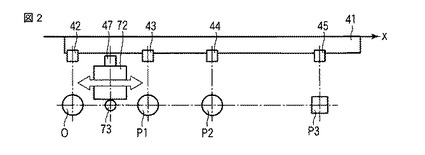
図2は、検出機構の一例として、水平方向に沿って直線移動(X軸方向に沿った一次元移動)する試薬アーム72用の検出機構を示している。同図に示す様に、試薬アーム72用検出機構は、ホーム位置Oに対応する位置に設けられたホーム位置ドグ42、試薬吸引位置(試薬ボトル位置)に対応する位置に設けられた試薬吸引位置ドグ43、洗浄プールに対応する位置に設けられた洗浄位置44、試薬分注位置(試薬吐出位置)に対応する位置に設けられた試薬分注位置ドグ45、試薬アーム72に設けられた検出ユニット47を有している。各位置ドグは、検出ユニット47の検出範囲に対してある程度の幅を持ち、試薬アーム73が移動するX軸方向に沿ったレール41上の、各処理位置に対応する位置に設置される。モータ制御により試薬アーム72を試薬吸引位置等の各処理位置に移動させる制御を実行した場合には、検出ユニット47が各位置ドグを検出しているか否かを示す検出情報が、当該移動制御直後等において判定ユニット20に提供される。判定ユニット20は、当該検出情報に基づいて、判定することで、試薬アーム72が現実に所望の処理位置に移動したか否かを知ることができる。
【0032】
なお、図2においては、試薬アーム71側に検出ユニット47を、試薬アーム73が移動するX軸方向に沿ったレール41側に各位置ドグを設ける場合を例示した。しかしながら、当該例に拘泥されず、例えばレール41側の各処理位置に検出ユニットを設け、試薬アーム73に検出用ドグを設けるようにしてもよい。
【0033】
(移動ユニット位置確認機能)
次に、本自動分析装置1が具備する移動ユニット位置確認機能について説明する。当該機能は、移動ユニットを可動範囲内において所望の位置に移動させる場合に、モータによる移動制御に加えて、少なくとも当該移動制御による移動直後において、当該移動ユニットが所望の位置に現実に移動したか否かを判定することで、より正確な自動分析処理を実現するものである。なお、以下においては、説明を具体的にするため、水平方向に沿って直線移動(X軸方向に沿って一次元移動)する試薬アーム72を例とする。
【0034】
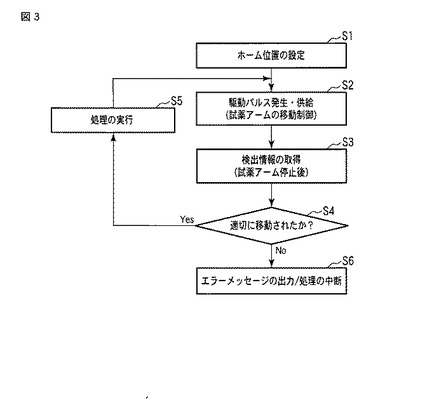
図3は、本移動ユニット位置確認処理の流れを示すフローチャートである。また、図4〜図6は、移動ユニット位置確認処理における各処理の内容を説明するための図である。図3〜図6を参照しながら、本移動ユニット位置確認処理において実行される各処理の内容について説明する。 [ホーム位置の設定:ステップS1]
まず、試薬アーム72のホーム位置の設定が実行される(ステップS1)。本ステップに係るホーム位置の設定は、例えば当該自動分析装置1を初期化するタイミング等において実行される。
【0035】
すなわち、図4に示すように、移動機構制御ユニット18は、移動の原点を確認するため、試薬アーム72をホーム位置Oに移動させる。ここで、検出ユニット47がホーム位置ドグ42を検知するのはドグの端部である。従って、ホーム位置Oの検出点をそのまま原点位置にしてしまうと、部品のガタや振動などで微妙にアームが動いた場合に、検出ユニット47がホーム位置ドグ42を検知したりしなかったりするといったチャタリングがおきる可能性がある。
【0036】
そこで、移動機構制御ユニット18は、検出ユニット47がホーム位置ドグ42の端部でなく中央部を検出するようにするために、検出ユニット47がホーム位置ドグ42の端部を検出したポイントからさらに数パルス分だけ試薬アーム72を移動させる。システム制御ユニット10は、当該移動後の位置をホーム位置(原点位置)Oとして設定する。
【0037】
[試薬アームの移動制御:ステップS2]
次に、試薬アーム72の移動制御が実行される(ステップS2)。例えば、試薬吸引処理を実行する場合には、移動機構制御ユニット18は、図5に示す様にLパルス分だけモータを制御し、試薬アーム72を試薬吸引位置まで移動させる。
【0038】
同様にして、移動機構制御ユニット18は、洗浄処理を実行する場合には、Mパルス分だけモータを制御し試薬アーム72を洗浄位置まで移動させる。また、移動機構制御ユニット18は、試薬分注処理を実行する場合には、Nパルス分だけモータを制御し試薬アーム72を試薬分注位置まで移動させる。
【0039】
[検出ユニットの検出状態を検知・移動適否の判定:ステップS3・S4]
判定ユニット20は、所定数のパルスに従って移動制御が実行された直後において、検出ユニット42から当該検出ユニット42の検出状態を示す検出情報を取得する(ステップS3)。判定ユニット20は、取得した検出情報に基づいて、試薬ユニット72の移動が適切に実行されたか否か(試薬アーム72が現実に所望の処理位置に移動したか否か)を判定する(ステップS4)。
【0040】
すなわち、ステップS1において設定されたホーム位置から、試薬アーム72をLパルス分移動させた位置が試薬吸引位置であり、Mパルス分移動させた位置が洗浄位置であり、Nパスル分移動させた位置が試薬分注位置である。従って、例えば試薬アーム72をホーム位置OからX方向にMパルス分移動させて洗浄位置P2に移動させるとき、不具合の発生が無い場合にはMパルス分に対応する距離だけ試薬アーム72は移動することになる。係る場合、検出ユニット42は、図5に示す様に洗浄位置ドグ44を検出することができる。従って、判定ユニット20は、「検出ユニット42は洗浄位置ドグ44を検出している」という状態をもって、試薬アーム72は正しい位置に移動していると判定することができる。
【0041】
一方、同じく試薬アーム72をホーム位置OからX方向にMパルス分移動させて洗浄位置P2に移動させるとき、移動機構制御ユニット18のモータのミスパルスに起因するパルス数とモータの回転量との食い違い、障害物等を原因とするモータ脱調、駆動ベルトの歯飛びやモータ軸のゆるみ等を原因とする移動の不具合が発生した場合には、試薬アーム72は、正しい位置まで移動することはできない。その結果、試薬アーム72は、本来の位置からはズレた位置に停止してすることになる。係る場合、検出ユニット42は、図6に示す様に洗浄位置ドグ44を検出することができない。従って、判定ユニット20は、「検出ユニット42は洗浄位置ドグ44を検出していない」という状態をもって、試薬アーム72は正しい位置に移動していないと判定することができる。
【0042】
なお、検出ユニット42からの検出情報の取得は、各位置ドグのX軸方向に沿った幅の中央位置付近の検出をもって行うことが好ましい。すなわち、位置ドグの端部検出をもって検出情報の取得を行わないようにすることで、検出ユニット42におけるチャタリングの発生を防止することができる。
【0043】
また、アームが動作して停止した時の位置精度が、たとえば±1.0mmの範囲であればよい場合、位置ドグの幅を2mm(中央±1.0mm)とすることで、停止位置精度範囲内に停止しているかどうかについても検出可能である。
【0044】
[処理の実行:ステップS5]
ステップS4において試薬ユニット72の移動が適切であると判定された場合には、システム制御ユニット10は、移動後の各位置において試薬吸引処理等の各種処理、及びそれ以降の各種処理と継続して実行する(ステップS5)。
【0045】
[エラーメッセージの出力:ステップS6]
ステップS4において試薬ユニット72の移動が適切でないと判定された場合には、システム制御ユニット10は、エラーメッセージ(警告)を出力すると共に、移動目的場所における処理を含む種々の処理を中断し、部品の損傷や分注ミスなどの発生を防止する(ステップS6)。
【0046】
なお、以上述べたステップS2〜S5までの処理は、試薬分注処理が全て完了するまで繰り返し実行される。途中、試薬アーム72が適切に移動していないと判定された場合には、ステップS6の処理よって、エラーメッセージの出力と共に試薬分注処理を含む種々の処理が中断されることになる。
【0047】
次に、移動ユニット位置確認機能の変形例について説明する。
【0048】
(変形例1)
上記実施形態では、移動ユニットとしての第2試薬アーム72が水平方向に沿って直線移動する場合を例とした。当然ながら、当該例に拘泥されることなく、上記移動ユニット位置確認機能は、移動ユニットが上下方向に沿って直線移動する場合、回動する場合、二次元的な移動(二軸を用いた移動)をする場合、三次元的な移動(三軸を用いた移動)をする場合、或いは回動と一次元、二次元、三次元移動とを組み合わせた移動をする場合のそれぞれについても適用することができる。
【0049】
例えば、移動ユニットが上下方向に沿って直線移動する場合については、例えば図3等に示す位置ドグを各ユニットが移動する上下方向に沿った所定の位置に配置することで、同様の制御を実行することで実現できる。また、移動ユニットが回動(或いは回転)する場合については、同じく図3等に示す位置ドグを各ユニットが移動する円周方向に沿った所定の位置に配置することで、同様の制御を実行することで実現できる。さらに、移動ユニットが回動と二次元(或いは三次元)移動とを組み合わせた移動をする場合には、回動については図3等に示す位置ドグを円周方向に配置すると共に、二次元(或いは三次元)移動については、図3等に示す位置ドグを各軸に沿った所定の位置に配置し、且つ異動後において全軸の位置ドグが検出された場合においてのみ「適切な移動」と判定することにより、同様の制御を実行することで実現できる。
【0050】
(変形例2)
上記実施形態では、移動ユニットが第2試薬アーム72である場合を例とした。当然ながら、当該例に拘泥されることなく、上記移動ユニット位置確認機能は、サンプルアーム52、第1試薬アーム62、撹拌アーム80、洗浄ユニット94についても適用可能である。さらに、上記移動ユニット位置確認機能は、反応ディスク39、サンプルディスク50、第1試薬庫60、第2試薬庫70についても適用可能である。特に、反応ディスク39等に適用する場合には、ディスクが回動(或いは回転)する円周方向に沿った所定の位置に各種位置ドグを配置することで、同様の制御を実行することで実現できる。
【0051】
(変形例3)
上記実施形態では、試薬アーム72の移動中においては、検出ユニット42からの検出情報の取得を行わず、移動完了のタイミングで検出情報を取得する場合を例とした。係る構成によれば、移動中に検出ユニット42が位置ドグの端部を通過するときのチャタリングによる誤検知を防止することができる。
【0052】
しかしながら、当該例に拘泥されず、例えば、移動途中に存在する他の位置ドグを通過するタイミングで検出情報の取得を行うことで、確実に通過すべき位置ドグを現実に通過しているか否かを移動中において確認することも可能である。例えば、図4において、試薬アーム72がホーム位置OからX軸方向に移動して試薬吸引位置を通過する瞬間に検出情報の取得を実行することで、試薬アーム72が試薬吸引位置を現実に通過したことを確認することができる。このとき、検出ユニット42の検出範囲が試薬吸引位置ドグのX軸方向の幅の中央部を通過するタイミングで検出情報の取得を実行することが好ましい。係る構成とすることで、チャタリングの発生を防止することができる。また係る構成の下でチャタリングが発生する場合或いはドグ位置が検出されない場合は、試薬吸引位置を正しく通過していないことになる。従って、洗浄位置への移動の適否に先立って、移動経路における異常を把握することができる。
【0053】
以上述べた構成によれば、以下の効果を実現することができる。
【0054】
すなわち、本自動分析装置によれば、移動ユニットを可動範囲内において所望の位置に移動させる場合に、モータによる移動制御に加えて、少なくとも当該移動制御による移動直後において、当該移動ユニットが所望の位置に現実に移動したか否かを判定する。移動が適切に実行されたと判定された場合には、以降の処理を継続して実行する。従って、移動ユニットの移動が適切になされたか否かを移動制御毎に確認するため、移動ユニットの移動制御につき誤動作のない自動分析処理を人為的負担を増やすことなく実現することができる。
【0055】
また、移動が適切に実行されていないと判定された場合には、エラーメッセージを出力すると共に処理を中断する。従って、操作者は、移動機構の不具合、移動経路における不具合の発生を迅速に把握できると共に、移動ユニットの移動制御につき誤動作を含む自動分析処理の発生を未然に防止することができる。
【0056】
なお、本発明は上記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記実施形態に開示されている複数の構成要素の適宜な組み合わせにより、種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施形態にわたる構成要素を適宜組み合わせてもよい。
【符号の説明】
【0057】
1…自動分析装置、10…システム制御ユニット、12…入力ユニット、14…表示ユニット、16…記憶ユニット、18…移動機構制御ユニット、20…判定ユニット、30…分析機構、39…反応ディスク、40…検出機構、50…サンプルディスク、52…サンプルアーム、60…第1試薬庫、62…第1試薬アーム、70…第2試薬庫、72…第2試薬アーム、80…撹拌アーム、94…洗浄ユニット
【技術分野】
【0001】
本発明は、例えば分注アーム等に代表される移動機構について位置確認を行うための機能を有する自動分析装置に関する。
【背景技術】
【0002】
自動分析装置(「検体検査装置」とも呼ばれる)とは、血液や尿に含まれる成分の濃度、あるいは活性値などを、検査試薬との化学反応を利用して光学的、電気的に測定する手順を自動化した装置である。この自動分析装置により同時に大量の分析、調査が可能であり、病院、検査機関等において広く利用され作業性の向上に大きく貢献している。
【0003】
このような自動分析装置においては、例えば試薬アーム、分注アーム、試薬ディスク、サンプルディスク等といった移動ユニットがある。これらの移動ユニットは、移動機構からの移動制御、位置決め制御に従って可動範囲内に原点となる位置(原点位置)と処理位置との間を移動しながら、所定の処理を実行する。例えば、試薬アームであれば、まず、試薬アームの動作前に原点出し動作を行って可動範囲内に原点位置が設定される。次に、所定のパルス数を加えて移動機構のモータを動作させることで、試薬アームを当該原点位置から試薬吸引位置、反応管の試薬分注位置、試薬プローブの洗浄位置等の各処理位置に移動させる。このとき、原点位置の他に各移動位置を直接検出するためのセンサが必要に応じて用意される。試薬アームを試薬吸引位置・反応管の試薬分注位置・試薬プローブの洗浄位置のそれぞれに移動させながら、センサにより各位置の検出を実行し、所望の位置を検出したときに試薬アームを停止する。これらの移動制御、位置決め制御により、試薬アームを可動範囲内の所望の位置に移動させることができる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平7−241097号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
従来の自動分析装置において、パルスモータなどによって移動ユニットを移動させる場合、ミスパルス、障害物へのぶつかり、トルク不足による脱調などで、モータを動かすパルス数と実際のモータの移動量に食い違いが発生する場合がある。係る場合には、移動ユニットを正規の位置に移動させることができず、適切な自動分析処理を実行することができない。この様な問題を解消するために、モータにエンコーダをつけてモータへのパルス数と実際のモータの回転量をフィードバックする方法が提案されている。しかしながら、モータ軸とプーリ間に機械的なズレが発生したり、ベルトの歯飛びが発生した場合には、パルス数とモータの回転量は等しいため、エンコーダを用いる方法では、ズレを検知できない場合が起こり得る。
【0006】
また、各処理位置に位置決め用のセンサをもたせた場合であっても、センサが部品の移動を検知したポイントに対して、可動部品の微細なガタなどで検知ポイントがわずかにズレると、検知ポイントにてセンサが誤ったON・OFF動作をするチャタリングが発生する可能性がある。係る誤動作防止のためには、検知ポイントから数パルス送ってセンサが確実にONする位置を位置決めポイントとする必要があるが、調整に手間がかかるという問題がある。
【0007】
上記事情を鑑みてなされたもので、移動ユニットが所望の位置に移動したか否かを正確に判定することで、従来に比して安定した自動分析処理を実行することができる自動分析装置を提供することを目的としている。
【課題を解決するための手段】
【0008】
一実施形態に係る自動分析装置は、それぞれが試薬を格納する複数の試薬容器と、複数の反応容器と、前記複数の試薬容器の中から選択された試薬容器から前記試薬を吸引する吸引処理と、前記複数の反応容器の中から選択された反応容器に吐出する吐出処理と、を実行する試薬アームと、前記吸引処理が実行される第1の位置と、前記吐出処理が実行される第2の位置と、前記試薬アームのプローブを洗浄する場合の洗浄位置に対応する第3の位置と、前記試薬アームの基準位置としての第4の位置と、の間において、供給される駆動信号に応答して前記試薬アームを所定の位置に移動ユニットとして移動させる移動機構と、前記移動機構による前記試薬アームの移動が行われた後、前記試薬アームが前記第1の位置、前記第2の位置、前記第3の位置、前記第4の位置のいずれかに移動したか否かを判定する判定ユニットと、を具備する自動分析装置である。
【図面の簡単な説明】
【0009】
【図1】図1は、本実施形態に係る自動分析装置1の構成を説明するための図である。
【図2】図2は、検出機構の一例として、水平方向に沿って直線移動(X軸方向に沿った一次元移動)する試薬アーム72用の検出機構を示している
【図3】図3は、移動ユニット位置確認処理の流れを示すフローチャートである。
【図4】図4は、移動ユニット位置確認処理における各処理の内容を説明するための図である。
【図5】図5は、移動ユニット位置確認処理における各処理の内容を説明するための図である。
【図6】図6は、移動ユニット位置確認処理における各処理の内容を説明するための図である。
【発明を実施するための形態】
【0010】
以下、第1実施形態を図面に従って説明する。なお、以下の説明において、略同一の機能及び構成を有する構成要素については、同一符号を付し、重複説明は必要な場合にのみ行う。
【0011】
図1は、本実施形態に係る自動分析装置1の構成を説明するための図である。同図に示す様に、本自動分析装置1は、システム制御ユニット10、入力ユニット12、表示ユニット14、記憶ユニット16、移動機構制御ユニット18、判定ユニット20、分析機構30、検出機構40(図1には図示せず。図2等参照)を具備している。
【0012】
システム制御ユニット10は、情報処理装置(計算機)としての機能を持ち、本本自動分析装置の動作を制御する。システム制御ユニット10は、記憶ユニット16から後述する移動ユニット位置確認機能を実現するための動作プログラム、各種計算処理を実行するための専用プログラムを読み出して各種処理に関する演算・制御等を実行する。
【0013】
入力ユニット12は、オペレータからの各種指令や情報入力を受け付ける。入力ユニット12としては、マウスやトラックボールなどのポインティングデバイス、スイッチボタン等の選択デバイス、あるいはキーボード等の入力デバイスが適宜利用可能である。
【0014】
表示ユニット14は、例えばCRTディスプレイや、液晶ディスプレイ、有機ELディスプレイ、プラズマディスプレイ等の表示デバイスを有する。表示ユニット14は、後述する測定処理の設定画面や分析結果を表示する。
【0015】
記憶ユニット16は、設定された測定対象項目、測定対象試薬、非測定対象項目、非測定対象試薬の識別情報を記憶する。また、記憶ユニット16は、測定項目パラメータや、測定結果、分析結果、試薬残量等も適宜記憶する。さらに、記憶ユニット16は、後述する移動ユニット位置確認機能を実行するための動作プログラム等を記憶している。
【0016】
移動機構制御ユニット18は、システム制御ユニット10からの制御に従って、移動ユニットをモータによって可動範囲内を移動させる。なお、移動機構制御ユニット18が有するモータの種類には拘泥されない。本実施形態においては、当該移動機構制御ユニット18はパルスモータを有する場合を例とする。しかしながら、後述する移動ユニット位置確認機能は、モータの種類に拘泥されるものではなく、例えばサーボモータを用いても実現可能である。
【0017】
判定ユニット20は、後述する移動ユニット位置確認機能に従う処理(移動ユニット位置確認処理)おいて、移動ユニットに設けられた検出機構(後述)からの検出信号に基づいて、移動ユニットが所望の位置に移動したか否かを判定する。
【0018】
分析機構30は、図1に示すように、移動ユニットとして、サンプルアーム52、第1試薬アーム62、第2試薬アーム72、撹拌アーム80、洗浄ユニット94、反応ディスク39、サンプルディスク50、第1試薬庫60、第2試薬庫70を備える。サンプルアーム52、第1試薬アーム62、第2試薬アーム72は、「分注アーム」と呼ばれることもある。以下、各移動ユニットを含む各構成要素の構造、機能、動作について詳しく説明する。
【0019】
反応ディスク39は、円周上に配列された複数の反応管41を保持する。反応ディスク39は、ある一定のサイクルで回動と停止とを繰り返す。
【0020】
サンプルディスク50は、反応ディスク39の近傍に配置されている。サンプルディスク50は、サンプルが収容されたサンプル容器51を保持する。サンプルディスク50は、特定の反応管41が所定のサンプル吸入位置に位置決めされるように回動する。
【0021】
第1試薬庫60は、反応ディスク39の内側に配置される。第1試薬庫60は、サンプルの各測定項目に選択的に反応する第1試薬が収容された複数の第1試薬容器61を保持する。第1試薬庫60は、特定の第1試薬容器61が所定の第1試薬吸入位置に位置決めされるように回動する。
【0022】
第2試薬庫70は、反応ディスク39の近傍に配置される。第2試薬庫70は、第1試薬に対応する第2試薬が収容された複数の第2試薬容器71を保持する。第2試薬庫70は、特定の第2試薬容器71が所定の第2試薬吸入位置に位置決めされるように回動する。
【0023】
反応ディスク39とサンプルディスク50との間にはサンプルアーム52が配置される。サンプルアーム52の先端には、サンプルプローブ53が取り付けられている。サンプルアーム52は、サンプルプローブ53を、サンプルディスク50上のサンプル吸入位置に移動する。そして、サンプルプローブ53は、サンプル吸入位置に配置されたサンプル容器41内へ下降し、液面を検知すると、さらに所定量だけ下降してサンプル容器51内のサンプルを所定量だけ吸入する。サンプルプローブ53は、サンプルを吸入し終わると上昇する。サンプルプローブ53が上昇し終わると、サンプルアーム52は回動して、サンプルプローブ53を、反応ディスク39のサンプル吐出位置へ移動させる。その後、サンプルプローブ53は、サンプル吐出位置に配置された反応管41に、吸入したサンプルを所定量だけ吐出する。サンプルは、測定対象項目毎に反応管41へ分注される。
【0024】
反応ディスク39の外周近傍には第1試薬アーム62が配置される。第1試薬アーム62の先端には第1試薬プローブ63が取り付けられている。第1試薬アーム62は、第1試薬プローブを上下動及び回動可能に保持する。第1試薬プローブ63は、第1試薬アーム62により、第1試薬庫60上の試薬吸入位置に移動される。
【0025】
反応ディスク39と第2試薬庫70との間には第2試薬アーム72が配置される。第2試薬アーム72の先端には第2試薬プローブ73が取り付けられている。第2試薬アーム62は、第2試薬プローブを上下動及び回動可能に保持する。第2試薬プローブ73は、第2試薬アーム72により、第2試薬庫70上の第2試薬吸入位置上に移動される。
【0026】
反応ディスク39の外周近傍には、撹拌アーム80が配置される。撹拌アーム80の先端には撹拌子83が取り付けられている。撹拌子83は、反応ディスク39上の撹拌位置に配置された反応管41内のサンプルと試薬とを撹拌する。サンプルと試薬とが撹拌されることにより、サンプルと試薬との化学反応が促進する。
【0027】
反応ディスク39には、測光部92が設けられている。測光部92は、発光体により反応ディスク39の測光位置にある反応管41に光を照射する。反応管41は、測光位置に照射されている光を横切るように反応ディスク39により回動される。測光部92は、反応管41内の混合液の透過光の光量を測定する。測定された光量は、図示しない分析部に送信され、サンプルの測定対象項目について分析される。
【0028】
反応ディスク39の外周近傍には、洗浄ユニット94が配置され、洗浄ユニット94には、複数本の洗浄ノズルと、乾燥ノズルが取り付けられている。洗浄ユニット94は、反応ディスク39の洗浄位置にある反応管41を洗浄ノズルにより洗浄し、乾燥ノズルにより乾燥する。
【0029】
なお、反応ディスク39に設けられる少なくとも一つの反応容器は、必要に応じて、試薬プローブ63,73、サンプルプローブ53を洗浄するための洗浄ブールとして用いられる。しかしながら、当該構成に限定する趣旨ではなく、専用の洗浄プールを別途設けるようにしてもよい。
【0030】
検出機構40は、移動制御によって移動ユニットの移動が完了するタイミング等において、移動ユニットが現実に所望の位置に移動したか否かを検出する。
【0031】
図2は、検出機構の一例として、水平方向に沿って直線移動(X軸方向に沿った一次元移動)する試薬アーム72用の検出機構を示している。同図に示す様に、試薬アーム72用検出機構は、ホーム位置Oに対応する位置に設けられたホーム位置ドグ42、試薬吸引位置(試薬ボトル位置)に対応する位置に設けられた試薬吸引位置ドグ43、洗浄プールに対応する位置に設けられた洗浄位置44、試薬分注位置(試薬吐出位置)に対応する位置に設けられた試薬分注位置ドグ45、試薬アーム72に設けられた検出ユニット47を有している。各位置ドグは、検出ユニット47の検出範囲に対してある程度の幅を持ち、試薬アーム73が移動するX軸方向に沿ったレール41上の、各処理位置に対応する位置に設置される。モータ制御により試薬アーム72を試薬吸引位置等の各処理位置に移動させる制御を実行した場合には、検出ユニット47が各位置ドグを検出しているか否かを示す検出情報が、当該移動制御直後等において判定ユニット20に提供される。判定ユニット20は、当該検出情報に基づいて、判定することで、試薬アーム72が現実に所望の処理位置に移動したか否かを知ることができる。
【0032】
なお、図2においては、試薬アーム71側に検出ユニット47を、試薬アーム73が移動するX軸方向に沿ったレール41側に各位置ドグを設ける場合を例示した。しかしながら、当該例に拘泥されず、例えばレール41側の各処理位置に検出ユニットを設け、試薬アーム73に検出用ドグを設けるようにしてもよい。
【0033】
(移動ユニット位置確認機能)
次に、本自動分析装置1が具備する移動ユニット位置確認機能について説明する。当該機能は、移動ユニットを可動範囲内において所望の位置に移動させる場合に、モータによる移動制御に加えて、少なくとも当該移動制御による移動直後において、当該移動ユニットが所望の位置に現実に移動したか否かを判定することで、より正確な自動分析処理を実現するものである。なお、以下においては、説明を具体的にするため、水平方向に沿って直線移動(X軸方向に沿って一次元移動)する試薬アーム72を例とする。
【0034】
図3は、本移動ユニット位置確認処理の流れを示すフローチャートである。また、図4〜図6は、移動ユニット位置確認処理における各処理の内容を説明するための図である。図3〜図6を参照しながら、本移動ユニット位置確認処理において実行される各処理の内容について説明する。 [ホーム位置の設定:ステップS1]
まず、試薬アーム72のホーム位置の設定が実行される(ステップS1)。本ステップに係るホーム位置の設定は、例えば当該自動分析装置1を初期化するタイミング等において実行される。
【0035】
すなわち、図4に示すように、移動機構制御ユニット18は、移動の原点を確認するため、試薬アーム72をホーム位置Oに移動させる。ここで、検出ユニット47がホーム位置ドグ42を検知するのはドグの端部である。従って、ホーム位置Oの検出点をそのまま原点位置にしてしまうと、部品のガタや振動などで微妙にアームが動いた場合に、検出ユニット47がホーム位置ドグ42を検知したりしなかったりするといったチャタリングがおきる可能性がある。
【0036】
そこで、移動機構制御ユニット18は、検出ユニット47がホーム位置ドグ42の端部でなく中央部を検出するようにするために、検出ユニット47がホーム位置ドグ42の端部を検出したポイントからさらに数パルス分だけ試薬アーム72を移動させる。システム制御ユニット10は、当該移動後の位置をホーム位置(原点位置)Oとして設定する。
【0037】
[試薬アームの移動制御:ステップS2]
次に、試薬アーム72の移動制御が実行される(ステップS2)。例えば、試薬吸引処理を実行する場合には、移動機構制御ユニット18は、図5に示す様にLパルス分だけモータを制御し、試薬アーム72を試薬吸引位置まで移動させる。
【0038】
同様にして、移動機構制御ユニット18は、洗浄処理を実行する場合には、Mパルス分だけモータを制御し試薬アーム72を洗浄位置まで移動させる。また、移動機構制御ユニット18は、試薬分注処理を実行する場合には、Nパルス分だけモータを制御し試薬アーム72を試薬分注位置まで移動させる。
【0039】
[検出ユニットの検出状態を検知・移動適否の判定:ステップS3・S4]
判定ユニット20は、所定数のパルスに従って移動制御が実行された直後において、検出ユニット42から当該検出ユニット42の検出状態を示す検出情報を取得する(ステップS3)。判定ユニット20は、取得した検出情報に基づいて、試薬ユニット72の移動が適切に実行されたか否か(試薬アーム72が現実に所望の処理位置に移動したか否か)を判定する(ステップS4)。
【0040】
すなわち、ステップS1において設定されたホーム位置から、試薬アーム72をLパルス分移動させた位置が試薬吸引位置であり、Mパルス分移動させた位置が洗浄位置であり、Nパスル分移動させた位置が試薬分注位置である。従って、例えば試薬アーム72をホーム位置OからX方向にMパルス分移動させて洗浄位置P2に移動させるとき、不具合の発生が無い場合にはMパルス分に対応する距離だけ試薬アーム72は移動することになる。係る場合、検出ユニット42は、図5に示す様に洗浄位置ドグ44を検出することができる。従って、判定ユニット20は、「検出ユニット42は洗浄位置ドグ44を検出している」という状態をもって、試薬アーム72は正しい位置に移動していると判定することができる。
【0041】
一方、同じく試薬アーム72をホーム位置OからX方向にMパルス分移動させて洗浄位置P2に移動させるとき、移動機構制御ユニット18のモータのミスパルスに起因するパルス数とモータの回転量との食い違い、障害物等を原因とするモータ脱調、駆動ベルトの歯飛びやモータ軸のゆるみ等を原因とする移動の不具合が発生した場合には、試薬アーム72は、正しい位置まで移動することはできない。その結果、試薬アーム72は、本来の位置からはズレた位置に停止してすることになる。係る場合、検出ユニット42は、図6に示す様に洗浄位置ドグ44を検出することができない。従って、判定ユニット20は、「検出ユニット42は洗浄位置ドグ44を検出していない」という状態をもって、試薬アーム72は正しい位置に移動していないと判定することができる。
【0042】
なお、検出ユニット42からの検出情報の取得は、各位置ドグのX軸方向に沿った幅の中央位置付近の検出をもって行うことが好ましい。すなわち、位置ドグの端部検出をもって検出情報の取得を行わないようにすることで、検出ユニット42におけるチャタリングの発生を防止することができる。
【0043】
また、アームが動作して停止した時の位置精度が、たとえば±1.0mmの範囲であればよい場合、位置ドグの幅を2mm(中央±1.0mm)とすることで、停止位置精度範囲内に停止しているかどうかについても検出可能である。
【0044】
[処理の実行:ステップS5]
ステップS4において試薬ユニット72の移動が適切であると判定された場合には、システム制御ユニット10は、移動後の各位置において試薬吸引処理等の各種処理、及びそれ以降の各種処理と継続して実行する(ステップS5)。
【0045】
[エラーメッセージの出力:ステップS6]
ステップS4において試薬ユニット72の移動が適切でないと判定された場合には、システム制御ユニット10は、エラーメッセージ(警告)を出力すると共に、移動目的場所における処理を含む種々の処理を中断し、部品の損傷や分注ミスなどの発生を防止する(ステップS6)。
【0046】
なお、以上述べたステップS2〜S5までの処理は、試薬分注処理が全て完了するまで繰り返し実行される。途中、試薬アーム72が適切に移動していないと判定された場合には、ステップS6の処理よって、エラーメッセージの出力と共に試薬分注処理を含む種々の処理が中断されることになる。
【0047】
次に、移動ユニット位置確認機能の変形例について説明する。
【0048】
(変形例1)
上記実施形態では、移動ユニットとしての第2試薬アーム72が水平方向に沿って直線移動する場合を例とした。当然ながら、当該例に拘泥されることなく、上記移動ユニット位置確認機能は、移動ユニットが上下方向に沿って直線移動する場合、回動する場合、二次元的な移動(二軸を用いた移動)をする場合、三次元的な移動(三軸を用いた移動)をする場合、或いは回動と一次元、二次元、三次元移動とを組み合わせた移動をする場合のそれぞれについても適用することができる。
【0049】
例えば、移動ユニットが上下方向に沿って直線移動する場合については、例えば図3等に示す位置ドグを各ユニットが移動する上下方向に沿った所定の位置に配置することで、同様の制御を実行することで実現できる。また、移動ユニットが回動(或いは回転)する場合については、同じく図3等に示す位置ドグを各ユニットが移動する円周方向に沿った所定の位置に配置することで、同様の制御を実行することで実現できる。さらに、移動ユニットが回動と二次元(或いは三次元)移動とを組み合わせた移動をする場合には、回動については図3等に示す位置ドグを円周方向に配置すると共に、二次元(或いは三次元)移動については、図3等に示す位置ドグを各軸に沿った所定の位置に配置し、且つ異動後において全軸の位置ドグが検出された場合においてのみ「適切な移動」と判定することにより、同様の制御を実行することで実現できる。
【0050】
(変形例2)
上記実施形態では、移動ユニットが第2試薬アーム72である場合を例とした。当然ながら、当該例に拘泥されることなく、上記移動ユニット位置確認機能は、サンプルアーム52、第1試薬アーム62、撹拌アーム80、洗浄ユニット94についても適用可能である。さらに、上記移動ユニット位置確認機能は、反応ディスク39、サンプルディスク50、第1試薬庫60、第2試薬庫70についても適用可能である。特に、反応ディスク39等に適用する場合には、ディスクが回動(或いは回転)する円周方向に沿った所定の位置に各種位置ドグを配置することで、同様の制御を実行することで実現できる。
【0051】
(変形例3)
上記実施形態では、試薬アーム72の移動中においては、検出ユニット42からの検出情報の取得を行わず、移動完了のタイミングで検出情報を取得する場合を例とした。係る構成によれば、移動中に検出ユニット42が位置ドグの端部を通過するときのチャタリングによる誤検知を防止することができる。
【0052】
しかしながら、当該例に拘泥されず、例えば、移動途中に存在する他の位置ドグを通過するタイミングで検出情報の取得を行うことで、確実に通過すべき位置ドグを現実に通過しているか否かを移動中において確認することも可能である。例えば、図4において、試薬アーム72がホーム位置OからX軸方向に移動して試薬吸引位置を通過する瞬間に検出情報の取得を実行することで、試薬アーム72が試薬吸引位置を現実に通過したことを確認することができる。このとき、検出ユニット42の検出範囲が試薬吸引位置ドグのX軸方向の幅の中央部を通過するタイミングで検出情報の取得を実行することが好ましい。係る構成とすることで、チャタリングの発生を防止することができる。また係る構成の下でチャタリングが発生する場合或いはドグ位置が検出されない場合は、試薬吸引位置を正しく通過していないことになる。従って、洗浄位置への移動の適否に先立って、移動経路における異常を把握することができる。
【0053】
以上述べた構成によれば、以下の効果を実現することができる。
【0054】
すなわち、本自動分析装置によれば、移動ユニットを可動範囲内において所望の位置に移動させる場合に、モータによる移動制御に加えて、少なくとも当該移動制御による移動直後において、当該移動ユニットが所望の位置に現実に移動したか否かを判定する。移動が適切に実行されたと判定された場合には、以降の処理を継続して実行する。従って、移動ユニットの移動が適切になされたか否かを移動制御毎に確認するため、移動ユニットの移動制御につき誤動作のない自動分析処理を人為的負担を増やすことなく実現することができる。
【0055】
また、移動が適切に実行されていないと判定された場合には、エラーメッセージを出力すると共に処理を中断する。従って、操作者は、移動機構の不具合、移動経路における不具合の発生を迅速に把握できると共に、移動ユニットの移動制御につき誤動作を含む自動分析処理の発生を未然に防止することができる。
【0056】
なお、本発明は上記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記実施形態に開示されている複数の構成要素の適宜な組み合わせにより、種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施形態にわたる構成要素を適宜組み合わせてもよい。
【符号の説明】
【0057】
1…自動分析装置、10…システム制御ユニット、12…入力ユニット、14…表示ユニット、16…記憶ユニット、18…移動機構制御ユニット、20…判定ユニット、30…分析機構、39…反応ディスク、40…検出機構、50…サンプルディスク、52…サンプルアーム、60…第1試薬庫、62…第1試薬アーム、70…第2試薬庫、72…第2試薬アーム、80…撹拌アーム、94…洗浄ユニット
【特許請求の範囲】
【請求項1】
それぞれが試薬を格納する複数の試薬容器と、
複数の反応容器と、
前記複数の試薬容器の中から選択された試薬容器から前記試薬を吸引する吸引処理と、前記複数の反応容器の中から選択された反応容器に吐出する吐出処理と、を実行する試薬アームと、
前記吸引処理が実行される第1の位置と、前記吐出処理が実行される第2の位置と、前記試薬アームのプローブを洗浄する場合の洗浄位置に対応する第3の位置と、前記試薬アームの基準位置としての第4の位置と、の間において、供給される駆動信号に応答して前記試薬アームを所定の位置に移動ユニットとして移動させる移動機構と、
前記移動機構による前記試薬アームの移動が行われた後、前記試薬アームが前記第1の位置、前記第2の位置、前記第3の位置、前記第4の位置のいずれかに移動したか否かを判定する判定ユニットと、
を具備する自動分析装置。
【請求項2】
それぞれが試料を格納する複数の試料容器と、
複数の反応容器と、
前記試料の試料容器の中から選択された試料容器から前記試料を吸引する吸引処理と、前記複数の反応容器の中から選択された反応容器に吐出する吐出処理と、を実行するサンプリングアームと、
前記吸引処理が実行される第1の位置と、前記吐出処理が実行される第2の位置と、前記サンプリングアームのプローブを洗浄する場合の洗浄位置に対応する第3の位置と、前記サンプリングアームの基準位置としての第4の位置と、の間において、供給される駆動信号に応答して前記サンプリングアームを所定の位置に移動ユニットとして移動させる移動機構と、
前記移動機構による前記分注アームの移動が行われた後、前記サンプリングアームが前記第1の位置、前記第2の位置、前記第3の位置、前記第4の位置のいずれかに移動したか否かを判定する判定ユニットと、
を具備する自動分析装置。
【請求項3】
試料と試薬とを反応させ、その反応結果を測定し分析する自動分析装置において、
前記試料と前記試薬とを格納する反応容器と、
前記反応容器内の前記試料と前記試薬とを撹拌する撹拌ユニットと、
前記反応容器内の前記試料と前記試薬とを撹拌する撹拌位置と、前記撹拌ユニットの基準位置との間において、前記撹拌ユニットを移動ユニットとして移動させる移動機構と、
前記撹拌ユニットの移動が行われた後、前記撹拌ユニットが前記撹拌位置に移動したか否かを判定する判定ユニットと、
を具備する自動分析装置。
【請求項4】
試料と試薬とを反応させ、その反応結果を測定し分析する自動分析装置において、
前記試料と前記試薬とを格納する反応容器と、
測定後の前記反応容器を洗浄する洗浄ユニットと、
前記測定後の前記反応容器を洗浄する洗浄位置と、前記洗浄ユニットの基準位置との間において、前記洗浄ユニットを移動ユニットとして移動させる移動機構と、
前記洗浄ユニットの移動が行われた後、前記洗浄ユニットが前記洗浄位置に移動したか否かを判定する判定ユニットと、
を具備する自動分析装置。
【請求項5】
それぞれが試薬を格納する複数の試薬容器と、
複数の反応容器と、
前記複数の試薬容器の中から選択された試薬容器から前記試薬を吸引する吸引処理と、前記複数の反応容器の中から選択された反応容器に吐出する吐出処理と、を実行する試薬アームと、
前記選択された試薬容器を、前記吸引処理が実行される吸引位置に移動ユニットとして移動させる移動機構と、
前記移動機構による前記選択された試薬容器の移動が行われた後、当該前記選択された試薬容器が前記吸引位置に移動したか否かを判定する判定ユニットと、
を具備する自動分析装置。
【請求項6】
それぞれが試料を格納する複数の試料容器と、
複数の反応容器と、
前記複数の試料容器の中から選択された試料容器から前記試料を吸引する吸引処理と、前記試料の反応容器の中から選択された反応容器に吐出する吐出処理と、を実行するサンプリングアームと、
前記選択された試料容器を、前記吸引処理が実行される吸引位置に移動ユニットとして移動させる移動機構と、
前記移動機構による前記選択された試料容器の移動が行われた後、当該前記選択された試料容器が前記吸引位置に移動したか否かを判定する判定ユニットと、
を具備する自動分析装置。
【請求項7】
試料を試薬と反応させ、その反応結果を測定して測定項目を分析する自動分析装置において、
複数の反応容器と、
前記複数の反応容器の中から選択された反応容器を、サンプリングアームによって試料を吐出するための第1の位置、試薬アームによって試薬を吐出るための第2の位置、試料と試薬とを撹拌ユニットによって撹拌するための第3の位置、洗浄ユニットによって洗浄するための第4の位置のいずれかに移動ユニットとして移動させるための移動機構と、
前記移動機構による前記選択された反応容器の移動が行われた後、当該選択された反応容器が前記第1の位置、前記第2の位置、前記第3の位置、第4の位置のいずれかに移動したか否かを判定する判定ユニットと、
を具備する自動分析装置。
【請求項8】
前記判定ユニットが前記移動ユニットの移動を不適と判定した場合には、前記自動分析装置における分析処理を中断する制御ユニットをさらに具備することを特徴とする請求項1乃至7のうちいずれか一項記載の自動分析装置。
【請求項9】
前記判定ユニットは、
前記移動ユニットに設けられた検出ユニットが、前記移動機構によって前記移動ユニットが移動されるべき各位置に設けられた被検出ユニットを検出したか否かに基づいて、前記判定を実行することを特徴とする請求項1乃至8のうちいずれか一項記載の自動分析装置。
【請求項10】
前記判定ユニットは、
前記移動機構によって前記移動ユニットが移動されるべき各位置に設けられた検出ユニットが、前記移動ユニットに設けられた被検出ユニットを検出したか否かに基づいて、前記判定を実行することを特徴とする請求項1乃至8のうちいずれか一項記載の自動分析装置。
【請求項11】
前記判定ユニットは、前記検出ユニットが前記被検出ユニットの前記移動に沿った幅の中心近傍を検出することで、前記検出ユニットが前記被検出ユニットを検出したと判定することを特徴とする請求項9又は10記載の自動分析装置。
【請求項12】
前記判定ユニットは、前記検出ユニットが前記移動ユニットの移動経路に存在する前記被検出ユニットを検出することで、前記移動ユニットの移動が適切に行われているか否かをさらに判定することを特徴とする請求項9記載の自動分析装置。
【請求項1】
それぞれが試薬を格納する複数の試薬容器と、
複数の反応容器と、
前記複数の試薬容器の中から選択された試薬容器から前記試薬を吸引する吸引処理と、前記複数の反応容器の中から選択された反応容器に吐出する吐出処理と、を実行する試薬アームと、
前記吸引処理が実行される第1の位置と、前記吐出処理が実行される第2の位置と、前記試薬アームのプローブを洗浄する場合の洗浄位置に対応する第3の位置と、前記試薬アームの基準位置としての第4の位置と、の間において、供給される駆動信号に応答して前記試薬アームを所定の位置に移動ユニットとして移動させる移動機構と、
前記移動機構による前記試薬アームの移動が行われた後、前記試薬アームが前記第1の位置、前記第2の位置、前記第3の位置、前記第4の位置のいずれかに移動したか否かを判定する判定ユニットと、
を具備する自動分析装置。
【請求項2】
それぞれが試料を格納する複数の試料容器と、
複数の反応容器と、
前記試料の試料容器の中から選択された試料容器から前記試料を吸引する吸引処理と、前記複数の反応容器の中から選択された反応容器に吐出する吐出処理と、を実行するサンプリングアームと、
前記吸引処理が実行される第1の位置と、前記吐出処理が実行される第2の位置と、前記サンプリングアームのプローブを洗浄する場合の洗浄位置に対応する第3の位置と、前記サンプリングアームの基準位置としての第4の位置と、の間において、供給される駆動信号に応答して前記サンプリングアームを所定の位置に移動ユニットとして移動させる移動機構と、
前記移動機構による前記分注アームの移動が行われた後、前記サンプリングアームが前記第1の位置、前記第2の位置、前記第3の位置、前記第4の位置のいずれかに移動したか否かを判定する判定ユニットと、
を具備する自動分析装置。
【請求項3】
試料と試薬とを反応させ、その反応結果を測定し分析する自動分析装置において、
前記試料と前記試薬とを格納する反応容器と、
前記反応容器内の前記試料と前記試薬とを撹拌する撹拌ユニットと、
前記反応容器内の前記試料と前記試薬とを撹拌する撹拌位置と、前記撹拌ユニットの基準位置との間において、前記撹拌ユニットを移動ユニットとして移動させる移動機構と、
前記撹拌ユニットの移動が行われた後、前記撹拌ユニットが前記撹拌位置に移動したか否かを判定する判定ユニットと、
を具備する自動分析装置。
【請求項4】
試料と試薬とを反応させ、その反応結果を測定し分析する自動分析装置において、
前記試料と前記試薬とを格納する反応容器と、
測定後の前記反応容器を洗浄する洗浄ユニットと、
前記測定後の前記反応容器を洗浄する洗浄位置と、前記洗浄ユニットの基準位置との間において、前記洗浄ユニットを移動ユニットとして移動させる移動機構と、
前記洗浄ユニットの移動が行われた後、前記洗浄ユニットが前記洗浄位置に移動したか否かを判定する判定ユニットと、
を具備する自動分析装置。
【請求項5】
それぞれが試薬を格納する複数の試薬容器と、
複数の反応容器と、
前記複数の試薬容器の中から選択された試薬容器から前記試薬を吸引する吸引処理と、前記複数の反応容器の中から選択された反応容器に吐出する吐出処理と、を実行する試薬アームと、
前記選択された試薬容器を、前記吸引処理が実行される吸引位置に移動ユニットとして移動させる移動機構と、
前記移動機構による前記選択された試薬容器の移動が行われた後、当該前記選択された試薬容器が前記吸引位置に移動したか否かを判定する判定ユニットと、
を具備する自動分析装置。
【請求項6】
それぞれが試料を格納する複数の試料容器と、
複数の反応容器と、
前記複数の試料容器の中から選択された試料容器から前記試料を吸引する吸引処理と、前記試料の反応容器の中から選択された反応容器に吐出する吐出処理と、を実行するサンプリングアームと、
前記選択された試料容器を、前記吸引処理が実行される吸引位置に移動ユニットとして移動させる移動機構と、
前記移動機構による前記選択された試料容器の移動が行われた後、当該前記選択された試料容器が前記吸引位置に移動したか否かを判定する判定ユニットと、
を具備する自動分析装置。
【請求項7】
試料を試薬と反応させ、その反応結果を測定して測定項目を分析する自動分析装置において、
複数の反応容器と、
前記複数の反応容器の中から選択された反応容器を、サンプリングアームによって試料を吐出するための第1の位置、試薬アームによって試薬を吐出るための第2の位置、試料と試薬とを撹拌ユニットによって撹拌するための第3の位置、洗浄ユニットによって洗浄するための第4の位置のいずれかに移動ユニットとして移動させるための移動機構と、
前記移動機構による前記選択された反応容器の移動が行われた後、当該選択された反応容器が前記第1の位置、前記第2の位置、前記第3の位置、第4の位置のいずれかに移動したか否かを判定する判定ユニットと、
を具備する自動分析装置。
【請求項8】
前記判定ユニットが前記移動ユニットの移動を不適と判定した場合には、前記自動分析装置における分析処理を中断する制御ユニットをさらに具備することを特徴とする請求項1乃至7のうちいずれか一項記載の自動分析装置。
【請求項9】
前記判定ユニットは、
前記移動ユニットに設けられた検出ユニットが、前記移動機構によって前記移動ユニットが移動されるべき各位置に設けられた被検出ユニットを検出したか否かに基づいて、前記判定を実行することを特徴とする請求項1乃至8のうちいずれか一項記載の自動分析装置。
【請求項10】
前記判定ユニットは、
前記移動機構によって前記移動ユニットが移動されるべき各位置に設けられた検出ユニットが、前記移動ユニットに設けられた被検出ユニットを検出したか否かに基づいて、前記判定を実行することを特徴とする請求項1乃至8のうちいずれか一項記載の自動分析装置。
【請求項11】
前記判定ユニットは、前記検出ユニットが前記被検出ユニットの前記移動に沿った幅の中心近傍を検出することで、前記検出ユニットが前記被検出ユニットを検出したと判定することを特徴とする請求項9又は10記載の自動分析装置。
【請求項12】
前記判定ユニットは、前記検出ユニットが前記移動ユニットの移動経路に存在する前記被検出ユニットを検出することで、前記移動ユニットの移動が適切に行われているか否かをさらに判定することを特徴とする請求項9記載の自動分析装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2012−251800(P2012−251800A)
【公開日】平成24年12月20日(2012.12.20)
【国際特許分類】
【出願番号】特願2011−122781(P2011−122781)
【出願日】平成23年5月31日(2011.5.31)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
【公開日】平成24年12月20日(2012.12.20)
【国際特許分類】
【出願日】平成23年5月31日(2011.5.31)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
[ Back to top ]