
自動制御装置

【課題】操作者の意思に反して自動制御が解除されてしまうことを抑制できる自動制御装置を提供する。
【解決手段】自動制動制御手段11は、制動装置20を制御することで自動的に制動力を発生させる自動制動制御を行う。制御解除手段12は、自動制動制御中にアクセルペダル操作量が所定量以上となったと判定したことに基づいて、自動制動制御を解除させるための解除信号を自動制動制御手段11に出力する。ただし、自動制動制御中に運転者がアクセルペダル40を所定量以上踏み込んでしまった場合であっても、誤操作判定手段13により、そのアクセルペダル操作が誤操作であると判定された場合には、制御解除手段12は解除信号を自動制動制御手段11へ出力しない。よって、運転者の意思に反して自動制動制御が解除されてしまうことを抑制できる。
【解決手段】自動制動制御手段11は、制動装置20を制御することで自動的に制動力を発生させる自動制動制御を行う。制御解除手段12は、自動制動制御中にアクセルペダル操作量が所定量以上となったと判定したことに基づいて、自動制動制御を解除させるための解除信号を自動制動制御手段11に出力する。ただし、自動制動制御中に運転者がアクセルペダル40を所定量以上踏み込んでしまった場合であっても、誤操作判定手段13により、そのアクセルペダル操作が誤操作であると判定された場合には、制御解除手段12は解除信号を自動制動制御手段11へ出力しない。よって、運転者の意思に反して自動制動制御が解除されてしまうことを抑制できる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自動制御装置に関し、特に、操作者の操作により自動制御が解除できる自動制御装置に関する。
【背景技術】
【0002】
制御対象装置の制御を自動で行う自動制御装置が種々知られている。たとえば、車両に搭載されている自動制御装置の例として、衝突の危険性が高いと判断された場合に自動的にブレーキをかけるプリクラッシュ制御装置、前車の速度にあわせて自動的に加減速を行い、前車との車間距離を自動的に維持するアダプティブクルーズコントロール装置、走行中の車線を検出して走行車線を維持するための操舵制御を自動で行う自動操舵装置、駐車位置まで車輪の転舵角を自動的に制御する駐車支援装置などがある。また、車両に用いられる装置以外にも、種々の自動制御装置が知られている。
【0003】
このような自動制御装置では、操作者の解除操作を検出したら、自動制御を解除する意思が操作者にあると判断して、自動制御を解除する。たとえば、特許文献1の車両用制動制御装置は、障害物との接触の可能性を判定し、その判定結果によっては自動的に制動力を発生させるが、自動的に制動力を発生させている状況においてアクセルペダルの踏み込みが行われたことを検出したら、制動制御を解除している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2003−175810号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
従来技術のように、自動制御中に、操作者による解除操作を検出したら、自動制御を解除する意思が操作者にあると判断して、自動制御を解除してしまう場合、操作者の誤操作が問題となる。すなわち、操作者が誤って解除操作を行ってしまったとしても、自動制御が解除されてしまうことになり、この場合、結果として、操作者の意思に反して自動制御が解除されてしまうことになってしまうという問題があった。
【0006】
本発明は、この事情に基づいて成されたものであり、その目的とするところは、操作者の意思に反して自動制御が解除されてしまうことを抑制できる自動制御装置を提供することにある。
【課題を解決するための手段】
【0007】
その目的を達成するための請求項1記載の発明によれば、自動制御中に操作者が誤って解除操作をしてしまった場合であっても、誤操作判定手段により、その解除操作が誤操作であると判定された場合には、制御解除手段は自動制御を解除しないことから、操作者の意思に反して自動制御が解除されてしまうことを抑制できる。
【0008】
請求項2記載の発明は、自動車に搭載される自動制御装置に適用されるものであり、自動制御手段は、自動車の車両挙動を自動的に制御する必要があると判定した場合には、自動車に搭載された車両制御装置を制御して、車両挙動を自動的に制御する自動車両制御を行う。また、制御解除手段における予め定められた解除操作は、自動車両制御による車両挙動とは相容れない車両挙動を指示する操作となっている。よって、解除操作が行われた場合に、自動車両制御と、解除操作が指示する車両挙動の両方を行うことはできないので、原則として、自動制御を解除し、解除操作が指示する車両挙動を実行する。しかし、自動車両制御中に解除操作が行われても、誤操作検出手段によってその解除操作が誤操作であると判定されれば、自動車両制御は解除されずに継続される。よって、操作者が、本来の自分の意図とは違う誤った操作をしてしまっても、操作者の意思に反して自動制御が解除されてしまうことを抑制できる。
【0009】
なお、自動車両制御による車両挙動とは相容れない車両挙動を指示する解除操作とは、解除操作が指示する車両挙動が、自動車両制御による車両挙動と同じ物理量を変化させることを指示するものであり、たとえば、請求項3、8、10記載のものがある。請求項3では、自動車両制御、解除操作とも加速度の変化であり、しかも、自動車両制御と解除操作は互いに反対方向に加速度を変化させる。また、請求項8では、自動車両制御、解除操作とも転舵角の変化である。解除操作は、自動車両制御によってある角度とされた転舵角をさらに変化させる操作であるから、両者は相容れない。また、請求項10では、自動車両制御は、ブレーキペダルが踏まれた状態でのクリープ走行中に行う制御であるのに対して、解除操作は、ブレーキペダルを離したことであるので、両者は相容れない。
【0010】
請求項3記載の発明は、自動車に搭載される自動制御装置に適用されるものであり、自動制御手段は、自動車に自動的に制動力を発生させる必要があると判定した場合には、自動車に搭載された制動装置を制御して自動的に制動力を発生させる自動制動制御を行う。この自動制動制御中に、運転者が誤ってアクセルを所定量以上踏み込んでしまった場合であっても、誤操作判定手段によってそのアクセル操作が誤操作であると判定されれば、自動制動制御は解除されずに継続される。よって、運転者の意思に反して自動制動制御が解除されてしまうことを抑制できる。
【0011】
また、請求項4のように、アクセルペダルの踏み込み操作が誤操作であったと判定された場合、一度、アクセルペダルの踏み込み量が所定量以下となった後でなければ、アクセルペダルの踏み込み量が所定量以上であっても、自動制御を解除しないようにすることが好ましい。このようにすれば、一度、誤操作と判定されれば、誤操作であったアクセルペダルの踏み込み操作が継続していても、自動制動制御が解除されてしまうことを抑制できる。
【0012】
また、誤操作判定手段は、たとえば請求項4のように、アクセルペダルの踏み込み量、アクセルペダルの踏み込み速度、前方の障害物までの距離、運転者の姿勢の少なくとも一つに基づいて、前記解除操作が誤操作であったか否かを判定するようにすればよい。
【0013】
これらのうち、解除操作と同じアクセルペダル操作に基づいて誤操作を判定する場合には、請求項6のように、アクセルペダルの踏み込み量が、自動制動制御を解除する所定量よりも大きい量に設定された基準踏み込み量以上であることに基づいて、解除操作が誤操作であったと判定したり、あるいは、請求項7のように、アクセルペダルの踏み込み速度が基準踏み込み速度よりも速いことに基づいて、解除操作が誤操作であったと判定することができる。
【0014】
請求項8記載の発明も、自動車に搭載される自動制御装置に適用されるものであり、自動制御手段は、自動車の車輪の転舵角を自動で制御する自動操舵制御を行う。この自動操舵制御中に、運転者が誤って所定角度以上のステアリングホイール操作をしてしまった場合であっても、誤操作判定手段によってそのステアリングホイール操作が誤操作であると判定されれば、自動操舵制御が解除されずに継続される。よって、運転車の意思に反して自動操舵制御が解除されてしまうことが抑制できる。
【0015】
また、請求項8において、誤操作判定手段は、たとえば請求項9のように、運転者が電装品を操作していること、運転者が居眠り状態にあること、運転者によるステアリングホイールの操作方向に障害物が存在すること、の少なくとも一つに基づいて、解除操作が誤操作であったか否かを判定するようにすればよい。
【0016】
請求項10記載の発明も、自動車に搭載される自動制御装置に適用されるものであり、自動制御手段は、駐車完了位置が設定された後のブレーキペダルが踏まれた状態でのクリープ走行中に、駐車完了位置に自動車が向かうように自動車の車輪の転舵角を自動的に制御する駐車支援制御を行う。この駐車支援制御中に運転者が誤ってブレーキペダルを離してしまった場合であっても、誤操作判定手段によってブレーキペダルを離した操作が誤操作であると判定されれば、駐車支援制御は解除されずに継続される。よって、運転者の意思に反して駐車支援制御が解除されてしまうことが抑制できる。
【0017】
また、請求項10において、誤操作判定手段は、たとえば請求項11のように、ブレーキペダルが初期位置へ戻る速度が所定速度以上であること、および、運転者がブレーキペダルを踏み外しやすい姿勢であることを検出したことの少なくともいずれか一方に基づいて、前記解除操作が誤操作であったか否かを判定するようにすればよい。
【図面の簡単な説明】
【0018】
【図1】本発明の要旨を示すフローチャートである。
【図2】本発明の第1実施形態の自動制動制御装置10を含む自動制動制御システム1の構成を示すブロック図である。
【図3】自動制動制御装置10の機能を示すブロック図である。
【図4】第2実施形態の自動操舵制御装置110を含む自動操舵制御システム100の構成を示すブロック図である。
【図5】自動操舵制御装置110の機能を示すブロック図である。
【図6】第3実施形態の駐車支援装置210を含む駐車支援システム200の構成を示すブロック図である。
【図7】駐車支援装置210の機能を示すブロック図である。
【発明を実施するための形態】
【0019】
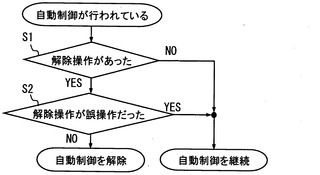
最初に本発明の要旨を説明する。図1は、本発明の要旨を示すフローチャートである。この図1に示すように、自動制御が行われている状態では、解除操作があったか否かを判断する(ステップS1)。解除操作がない場合にはステップS1が否定判断となり、自動制御を継続する。一方、解除操作があった場合には、それのみによって自動制御を解除してしまうのではなく、ステップS2の判断を行う。ステップS2では、解除操作が誤操作であったか否かをさらに判断する。判断結果が肯定判断である場合、すなわち、解除操作が誤操作であったと判断した場合には、自動制御を解除せずに、その自動制御を継続する。一方、解除操作が誤操作でないと判断した場合は、自動制御を解除する。
【0020】
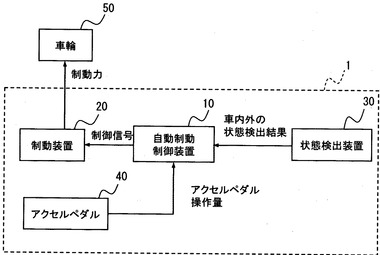
次に、具体的な実施形態を図面に基づいて説明する。図2は、本発明の第1実施形態の自動制動制御装置10を含む自動制動制御システム1の構成を示すブロック図である。この自動制動制御システム1は、自動車(以下では車両ともいう)に搭載されるものであって、自動制動制御装置10の他に、制動装置20、状態検出装置30、アクセルペダル40を有している。
【0021】
制動装置20は、自動制動制御装置10の制御対象装置であり、自動制動制御装置10によって制御されて車両の車輪50を制動する制動力を発生する。
【0022】
状態検出装置30は、車両内外の予め定められた種々の状態を検出する装置であり、制動装置20を制御して自動的に制動力を発生させる必要があるか否かを判断するために用いる種々の状態を検出する。制動装置20を制御して自動的に制動力を発生させる必要がある状況には、たとえば、このままの走行では障害物と衝突してしまう可能性が高い状況、このままの走行では転落する可能性が高い状況、運転者が運転を継続できない状態に陥った状況、法規等により減速または停止を行わなければならない状況(信号が赤の場合など)などがある。これらの状況であるか否かを判断するために必要な状態としては、たとえば、車速、進行方向の障害物の存在およびその障害物までの距離、ブレーキ操作の有無、走行予測経路、進行方向の路面の段差、運転者の覚醒状態、道路標識や道路標示の有無およびその種類などがある。さらに、状態検出装置30は、自動制動制御を運転者が解除する解除操作が誤操作であるか否かを判定するための状態(たとえば、運転者の姿勢)も検出する。状態検出装置30は、これらの状態を、光、音、電波、電気信号を一種類または複数種類用いて検出する。そして、検出した状態を自動制動制御装置10へ送る。
【0023】
また、自動制動制御装置10は、アクセルペダル40からアクセルペダル操作量(すなわちアクセルペダル踏み込み量)を示す信号を逐次取得する。なお、アクセルペダル操作量を示す信号は、アクセルペダル40に取り付けられたセンサによって検出されるものでもよいし、また、アクセルペダル操作量に応じて変化するスロットル開度をこの信号としてもよい。
【0024】
自動制動制御装置10は、図示しない内部に、CPU、ROM、RAM等を備えたコンピュータであり、CPUが、RAMの一時記憶機能を利用しつつROMに記憶されたプログラムを実行することで図3に示す種々の手段として機能する。
【0025】
次に、自動制動制御装置10の機能を図3を用いて説明する。自動制動制御装置10は、図3に示すように、自動制動制御手段11、制御解除手段12、誤操作判定手段13を備えている。
【0026】
自動制動制御手段11は、状態検出装置30から送られてきた種々の状態に基づいて、制動装置20を制御して自動的に制動力を発生させる必要がある状況であるか否かを逐次判断する。そして、制動力を発生させる必要があると判断した場合には、制動装置20に制御信号を送信することで、制動装置20に自動的に制動力を発生させる自動制動制御を行う。
【0027】
制御解除手段12は、自動制動制御手段11から自動制動制御を実行中か否かを示す制御状態信号を取得し、また、アクセルペダル操作量も取得する。そして、自動制動制御手段11による自動制動制御中は、制御解除操作が行われたか否か、すなわち、アクセルペダル操作量が所定量以上となったか否かの判定を繰り返し行う。そして、アクセルペダル操作量が所定量以上となったと判定した場合であって、誤操作判定手段13から、誤操作と判定したことを示す判定結果を取得しなかった場合には、自動制動制御を解除させる解除信号を自動制動制御手段11へ出力する。
【0028】
なお、制御解除手段12は、誤操作判定手段13からの判定結果を取得するために、解除信号を、まず、誤操作判定手段13へ送信する。その後、極短時間に設定されている所定時間内において、誤操作と判定したことを示す判定結果を取得するか否かを判断する。そして、誤操作判定手段13から誤操作ではないとの判定結果を取得した場合に限らず、誤操作と判定したことを示す判定結果を取得しない場合も、誤操作と判定したことを示す判定結果を取得しなかったと判断する。
【0029】
自動制動制御手段11は、制御解除手段12から解除信号を取得した場合には自動制動制御を解除(中止)する。このようにするのは、アクセルペダル40が操作されたのは運転者に加速の意思があるからだと考えるからであり、自動制御よりも運転者の意思を優先させることを原則的な考えとしているからである。なお、自動制動制御を解除するとは、制動装置20への制御信号の出力を中止することである。
【0030】
ところで、運転者が誤ってアクセルペダル40を踏んでしまうことも考えられる。そこで、本実施形態では、誤操作判定手段13を備えている。誤操作判定手段13は、制御解除手段12から解除信号を取得する。そして、解除信号を取得したら、運転者のアクセルペダル操作が誤操作であったか否かを判定する。判定には、具体的には、アクセルペダル40の操作量、アクセルペダル40の踏み込み速度、前方障害物までの距離、運転者の姿勢の少なくとも一つを用いる。これらのうちのどれを用いるかは予め設定されている。なお、アクセルペダルの誤操作判定装置には、例えば特開平1−78939号公報に記載の装置などが知られており、本発明でも、公知の種々のアクセルペダル誤操作判定手法を用いることができる。
【0031】
アクセルペダル40の操作量、アクセルペダル40の踏み込み速度は、アクセルペダル40から逐次供給されるアクセルペダル操作量に基づいて決定する。そして、アクセルペダル40の操作量が、制動制御を解除する判定に用いる所定量よりも十分に大きい誤判定基準操作量以上である場合や、アクセルペダル40の踏み込み速度が誤判定基準踏み込み速度よりも大きい場合には、アクセル操作は誤操作であったと判定する。アクセルペダル40は、通常、ブレーキペダルに比べて、それほど大きく踏み込むことはなく、また、それほど速い速度で踏み込むこともない。上記誤判定基準操作量や誤判定基準踏み込み速度は、通常のアクセルペダル40の操作量と踏み込み速度よりも大きく、急ブレーキあるいはそれに近いブレーキ操作におけるブレーキペダル操作量や踏み込み速度よりも小さくなるように設定されている。
【0032】
前方障害物までの距離、運転者の姿勢は、状態検出装置30が検出した状態に基づいて決定する。そして、前方障害物までの距離が予め設定された衝突危険距離よりも短い場合には、アクセル操作は誤操作であったと判定する。なお、衝突危険距離は、一定値でもよいし、また、車速に応じて変化する距離としてもよい。また、運転者の姿勢が、通常の前進走行の運転姿勢とは異なる姿勢(たとえば、後方を確認する姿勢や助手席に手を伸ばした姿勢)を検出した場合に、アクセル操作は誤操作であったと判定する。
【0033】
そして、誤操作判定手段13は、運転者のアクセルペダル操作が誤操作であったと判定した場合は、誤操作と判定したことを示す判定結果を制御解除手段12に出力する。また、誤操作でないと判定した場合にも、そのことを示す判定結果を制御解除手段12に出力するようにしてもよい。
【0034】
誤操作判定手段13から誤操作と判定したことを示す判定結果を取得した制御解除手段12は、アクセルペダル操作量が所定量以上となった場合であっても、解除信号を出力しない。よって、自動制動制御手段11は、自動制動制御を継続することになる。この自動制動制御が実行されている間は、運転者のアクセルペダル操作は無効化して、アクセルペダル40が踏まれていても車両の加速は行わず、自動制動制御による制動制御を行う。
【0035】
なお、誤操作判定手段13は、解除信号を取得している間、すなわち、アクセルペダル操作量が所定量以上となっている間は、継続的に、アクセルペダル操作が誤操作であったか否かを判定する。
【0036】
しかし、一度、誤操作が判定された後、アクセルペダル40が誤って踏み込まれている状態が継続していても、誤操作との判定は継続しないことも考えられる。たとえば、アクセルペダル40の操作量が、一旦は、誤判定基準操作量を超えたが、やや戻されて、誤判定基準操作量以下だが制御解除の判定基準となっている所定量よりは大きい場合や、アクセルペダル40が一気に踏み込まれて、踏み込まれた位置でアクセルペダル40が保持された場合には、誤操作であるにもかかわらず、誤操作との判定は継続しない。したがって、アクセルペダル40が誤って踏み込まれている状態が継続していると、自動制動制御が解除されて、急に、アクセルペダル40の誤操作に起因する加速が行われてしまう可能性もある。
【0037】
そこで、制御解除手段12は、誤操作判定手段13によりアクセルペダル40の踏み込み操作が誤操作であったと判定された場合、すなわち、一旦、誤操作であるとの判定結果を取得した場合、制御解除判定の基準となる所定量以下までアクセルペダル40の操作量が戻されるまでは、アクセルペダル40の操作量が所定量以上であっても、誤操作の状態が継続しているとして、自動制動制御を解除する操作が行われたか否かの判定を中止する。この判定を中止する結果、アクセルペダル40が所定量以下に戻された後でなければ、アクセルペダル40の操作量が所定量以上であっても解除信号を自動制動制御手段11に出力しないことになる。これにより、アクセルペダル40が誤って踏み込まれている状態が継続していても、急に、アクセルペダル40の誤操作に基づく加速が行われてしまうことが抑制される。
【0038】
以上、説明した第1実施形態によれば、自動制動制御中に運転者が誤ってアクセルペダル40を所定量以上踏み込んでしまった場合であっても、誤操作判定手段13により、その解除操作が誤操作であると判定された場合には、制御解除手段12は、自動制動制御を解除させる解除信号を自動制動制御手段11へ出力しない。よって、運転者の意思に反して自動制動制御が解除されてしまうことを抑制できる。
【0039】
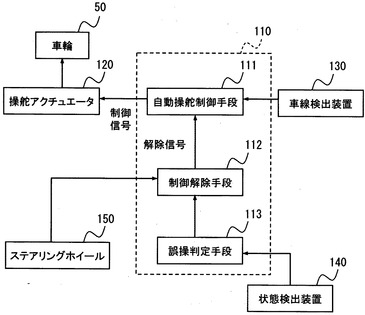
次に、第2実施形態を説明する。図4は、第2実施形態の自動操舵制御装置110を含む自動操舵制御システム100の構成を示すブロック図である。この自動操舵制御システム100も自動車に搭載されるものであって、自動操舵制御装置110の他に、操舵アクチュエータ120、車線検出装置130、状態検出装置140、ステアリングホイール150を有している。
【0040】
操舵アクチュエータ120は、図示しない操舵軸あるいはラック軸に設けられて、その軸を軸回りに回転させるモータであり、この操舵アクチュエータ120を制御することにより、車輪50の転舵角を制御することができる。
【0041】
車線検出装置130は、車両が走行中の車線を区画する車線区画線(白線等)を検出するものであり、たとえば、レーザレーダや車載カメラを車線検出装置130として用いる。
【0042】
状態検出装置140は、車両内外の予め定められた種々の状態を検出する装置であり、自動操舵制御を運転者が解除する解除操作が誤操作であるか否かを判定するための状態(たとえば、運転者の居眠り状態)を検出する。そして、検出した状態を示す信号を自動操舵制御装置110へ送る。
【0043】
自動操舵制御装置110は、図示しない内部に、CPU、ROM、RAM等を備えたコンピュータであり、CPUが、RAMの一時記憶機能を利用しつつROMに記憶されたプログラムを実行することで図5に示す種々の手段として機能する。
【0044】
次に、自動操舵制御装置110の機能を図5を用いて説明する。自動操舵制御装置110は、図5に示すように、自動操舵制御手段111、制御解除手段112、誤操作判定手段113を備えている。
【0045】
自動操舵制御手段111は、自動操舵制御の指示が運転者から行われた場合に、自動操舵制御を行う。この自動操舵制御は、走行中の車線を車両が逸脱しないように、車輪50の転舵角を自動的に制御する制御である。より詳しくは、この自動操舵制御中は、自車位置に対する車線区画線の位置を、車線検出装置130からの信号により逐次判断する。そして、自車が現在の車線を逸脱しそうであると判断した場合には、操舵アクチュエータ120に制御信号を出力して操舵アクチュエータ120に操舵トルクを発生させて、現在の車線を逸脱しない方向に車輪50の転舵角を制御する。
【0046】
制御解除手段112は、自動操舵制御手段111から自動操舵制御を実行中か否かを示す制御状態信号を逐次取得し、また、ステアリングホイール150の回転位置も逐次取得する。そして、自動操舵制御手段111による自動操舵制御中に、運転者によってステアリングホイール150が所定角度以上操作された場合であって、誤操作判定手段113から、誤操作と判定したことを示す判定結果を取得しなかった場合には、自動操舵制御を解除させる解除信号を自動操舵制御手段111へ出力する。なお、誤操作と判定しなかった場合とは、第1実施形態と同様に、誤操作ではないとの判定結果を取得した場合に限らず、所定時間内に誤操作と判定したことを示す判定結果を取得しない場合も含まれる。
【0047】
自動操舵制御手段111は、制御解除手段112から解除信号を取得した場合には自動操舵制御を解除(中止)する。しかし、運転者のステアリングホイール150の操作が誤操作であることも考えられるので、誤操作判定手段113を備えている。誤操作判定手段113は、制御解除手段112から解除信号を取得する。そして、解除信号を取得したら、運転者のステアリングホイール150の操作が誤操作であったか否かを判定する。判定は、具体的には、運転者が電装品を操作している状態かどうか、運転者の覚醒状態、障害物の相対位置の少なくとも一つを用いる。これらのうちどれを用いるかは予め設定されている。
【0048】
運転者が電装品を操作している状態かどうかは、運転者の姿勢から判定する。運転者の姿勢は、運転者を撮影する車室内カメラの画像を解析することで判定する。また、座席に設けた複数の圧力センサの検出値に基づいて判定してもよい。この運転者の姿勢に加えて、電装品が操作されたことを示す信号、および、その電装品の操作部の位置が運転席に近いか否かも考慮して、運転者が電装品を操作している状態かどうかを判定してもよい。そして、運転者が電装品を操作している状態と判定したら、ステアリングホイール150の操作は、電装品を操作しようとした際に誤って操作してしまった、すなわち、自動操舵制御を解除するステアリング操作は誤操作であったと判定する。
【0049】
運転者の覚醒状態は、たとえば、車室内カメラにより撮影した運転者の顔の画像を解析することで判定する。また、脈波等の生体信号に基づいて判定してもよい。そして、運転者が覚醒状態でないと判定したら、自動操舵制御を解除するステアリング操作は誤操作であったと判定する。
【0050】
障害物の相対位置は、レーダやカメラ画像により判定する。そして、ステアリングホイール150の操作方向が障害物の相対位置の方向であった場合、障害物の方向に向けて車両を進行させようとすることは考えられないことから、自動操舵制御を解除するステアリング操作は誤操作であったと判定する。
【0051】
このようにして、ステアリングホイール150の操作が誤操作であったと判定した場合は、誤操作判定手段113は、誤操作と判定したことを示す判定結果を制御解除手段112に出力する。また、誤操作でないと判定した場合にも判定結果を出力するようにしてもよい。
【0052】
誤操作判定手段113から誤操作と判定したことを示す判定結果を取得した制御解除手段112は、運転者によりステアリングホイール150が所定角度以上操作されても、解除信号を出力しない。よって、自動操舵制御手段111は、自動操舵制御を継続することになる。この自動操舵制御が実行されている間は、運転者のステアリングホイール操作は無効化して、自動操舵制御による操舵制御を行う。
【0053】
以上、説明した第2実施形態によれば、自動操舵制御中に、運転者が誤って所定角度以上のステアリングホイール操作をしてしまった場合であっても、誤操作判定手段113によってそのステアリングホイール操作が誤操作であると判定されれば、自動操舵制御が解除されずに継続される。よって、運転車の意思に反して自動操舵制御が解除されてしまうことが抑制できる。
【0054】
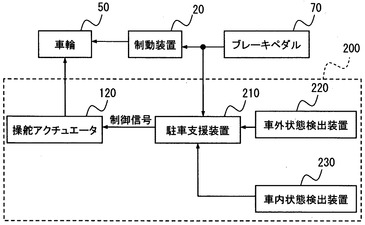
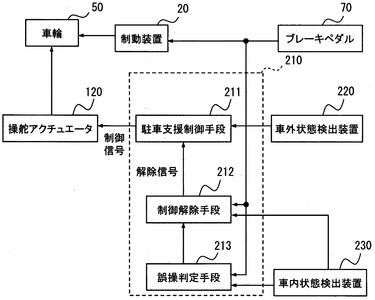
次に、第3実施形態を説明する。図6は、第3実施形態の駐車支援装置210を含む駐車支援システム200の構成を示すブロック図である。この駐車支援システム200も自動車に搭載されるものであって、駐車支援装置210の他に、第2実施形態のものと同じ操舵アクチュエータ120、車外状態検出装置220、車内状態検出装置230を有している。
【0055】
車外状態検出装置220は、車両外の予め定められた種々の状態を検出する装置であり、駐車支援制御を実行するために必要な車両外の状態を検出する。そして、検出した状態を示す信号を駐車支援装置210へ送る。
【0056】
車内状態検出装置230は、車両内の予め定められた種々の状態を検出する装置であり、駐車支援制御を運転者が解除する解除操作が誤操作であるか否かを判定するために必要な車両内の状態を検出する。そして、検出した状態を示す信号を駐車支援装置210へ送る。
【0057】
駐車支援装置210は、図示しない内部に、CPU、ROM、RAM等を備えたコンピュータであり、CPUが、RAMの一時記憶機能を利用しつつROMに記憶されたプログラムを実行することで図7に示す種々の手段として機能する。
【0058】
次に、駐車支援装置210の機能を図7を用いて説明する。駐車支援装置210は、図7に示すように、駐車支援制御手段211、制御解除手段212、誤操作判定手段213を備えている。
【0059】
駐車支援制御手段211は、駐車支援制御の指示が運転者から行われ、かつ、運転者によって駐車完了位置が指定された場合に、駐車支援制御を行う。この駐車支援制御は、駐車完了位置に車両が向かうように車輪の転舵角を自動的に制御する制御である。
【0060】
より詳しく駐車支援制御を説明すると、運転者が駐車完了位置を指定する操作は、車載カメラによって撮影された画像が車内のディスプレイに表示され、そのディスプレイ上にて駐車完了位置を指定する操作である。このようにして、駐車完了位置が指定されると、駐車支援制御手段211は、駐車完了位置に対する自車の位置・向きを把握する。そして、運転者がブレーキペダルの踏力を弱めて車両がクリープ走行を開始すると、車速および車輪50の転舵角を逐次検出することにより、駐車完了位置に対する自車の位置・向きを逐次把握する。そして、把握した駐車完了位置に対する自車の向きから、自車が駐車完了位置に向かうための車輪50の転舵角を決定し、その転舵角となるように、操舵アクチュエータ120に制御信号を出力する。
【0061】
上記駐車支援制御は、車両の速度調節は運転者が行うようになっており、速度調節を運転者が行わなかった場合や速度調節を誤った場合には、制御解除手段212からの解除信号により、制御を解除するようになっている。
【0062】
その制御解除手段212は、ブレーキペダル70の踏み込み量を示す信号および車速を逐次取得し、駐車支援制御中に、ブレーキペダル70が離されたことを検出した場合、または、車速が所定車速以上となった場合であって、誤操作判定手段213から、誤操作と判定したことを示す判定結果を取得しなかった場合には、駐車支援制御を解除させる解除信号を駐車支援制御手段211へ出力する。なお、誤操作と判定しなかった場合とは、第1実施形態と同様に、誤操作ではないとの判定結果を取得した場合に限らず、所定時間内に誤操作と判定したことを示す判定結果を取得しない場合も含まれる。
【0063】
駐車支援制御手段211は、制御解除手段212から解除信号を取得した場合には駐車支援制御を解除(中止)する。しかし、運転者が誤ってブレーキペダル70を離してしまうことも考えられるので、誤操作判定手段213を備えている。誤操作判定手段213は、制御解除手段212から解除信号を取得する。そして、解除信号を取得したら、運転者がブレーキペダル70を離した操作が誤操作であったか否かを判定する。判定は、具体的には、ブレーキペダル70が初期位置へ戻る速度、および、運転者の姿勢のいずれか一方または両方に基づいて行う。これらのうちどれを用いるかは予め設定されている。
【0064】
ブレーキペダル70が初期位置へ戻る速度は、ブレーキ油圧の変化速度から決定する。また、ブレーキペダル70にストロークセンサを設け、そのストロークセンサからの信号に基づいて決定してもよい。そして、ブレーキペダル70を離す速度が、ブレーキペダル70を踏み外してしまったと判断できる程度の速い速度であった場合には、ブレーキペダル70を離した操作は誤操作であったと判定する。
【0065】
運転者の姿勢は、第2実施形態と同様にして決定する。そして、決定した運転者の姿勢がブレーキペダル70を踏み外しやすい姿勢(たとえば後ろを向いているなど)であった場合には、ブレーキペダル70を離した操作は誤操作であったと判定する。
【0066】
このようにして、運転者がブレーキペダル70を離した操作誤操作であったと判定した場合は、誤操作判定手段213は、誤操作と判定したことを示す判定結果を制御解除手段212に出力する。また、誤操作でないと判定した場合にも判定結果を出力するようにしてもよい。
【0067】
誤操作判定手段213から誤操作と判定したことを示す判定結果を取得した制御解除手段212は、ブレーキペダル70が離されても解除信号を出力しない。よって、駐車支援制御手段211は駐車支援制御を継続することになる。
【0068】
以上、説明した第3実施形態によれば、駐車支援制御中に運転者が誤ってブレーキペダル70を離してしまった場合であっても、誤操作判定手段213によってブレーキペダル70を離した操作が誤操作であると判定されれば、駐車支援制御は解除されずに継続される。よって、運転者の意思に反して駐車支援制御が解除されてしまうことが抑制できる。
【0069】
以上、本発明の実施形態を説明したが、本発明は上述の実施形態に限定されるものではなく、次の実施形態も本発明の技術的範囲に含まれ、さらに、下記以外にも要旨を逸脱しない範囲内で種々変更して実施することができる。
【0070】
たとえば、前述の実施形態では、誤操作判定手段13、113、213は、制御解除手段12、112、212から解除信号を取得したことにより誤操作の判定を開始していたが、制御解除手段12、112、212が制御解除と判定するのと同じ条件により、誤操作の判定を開始するようにしてもよい。
【0071】
また、前述の第1実施形態では、一旦、誤操作である判定した場合に、自動制動制御を解除する操作が行われたか否かの判定を再開する条件は、アクセルペダル40の操作量が所定量以下まで戻されることであったが、これに限られない。たとえば、予め定められた時間が経過したら、自動制動制御を解除する操作が行われたか否かの判定を再開するようにしてもよい。
【0072】
また、前述の3つの実施形態はいずれも車両用であったが、本発明は車両用以外にも適用可能である。また、前述の第1〜第3実施形態のうち、いずれか2つ、または3つ全ての機能を備えた自動制御装置を構成してもよい。
【符号の説明】
【0073】
1:自動制動制御システム、 10:自動制動制御装置、 11:自動制動制御手段、 12:制御解除手段、 13:誤操作判定手段、 20:制動装置、 30:状態検出装置、 40:アクセルペダル、 50:車輪、 100:自動操舵制御システム、 110:自動操舵装置、 111:自動操舵制御手段、 112:制御解除手段、 113:誤操作判定手段、 120:操舵アクチュエータ、 130:車線検出装置、 140:状態検出装置、 150:ステアリングホイール、 200:駐車支援システム、 210:駐車支援装置、 211:駐車支援制御手段、 212:制御解除手段、 213:誤操作判定手段、 220:車外状態検出装置、 230:車内状態検出装置
【技術分野】
【0001】
本発明は、自動制御装置に関し、特に、操作者の操作により自動制御が解除できる自動制御装置に関する。
【背景技術】
【0002】
制御対象装置の制御を自動で行う自動制御装置が種々知られている。たとえば、車両に搭載されている自動制御装置の例として、衝突の危険性が高いと判断された場合に自動的にブレーキをかけるプリクラッシュ制御装置、前車の速度にあわせて自動的に加減速を行い、前車との車間距離を自動的に維持するアダプティブクルーズコントロール装置、走行中の車線を検出して走行車線を維持するための操舵制御を自動で行う自動操舵装置、駐車位置まで車輪の転舵角を自動的に制御する駐車支援装置などがある。また、車両に用いられる装置以外にも、種々の自動制御装置が知られている。
【0003】
このような自動制御装置では、操作者の解除操作を検出したら、自動制御を解除する意思が操作者にあると判断して、自動制御を解除する。たとえば、特許文献1の車両用制動制御装置は、障害物との接触の可能性を判定し、その判定結果によっては自動的に制動力を発生させるが、自動的に制動力を発生させている状況においてアクセルペダルの踏み込みが行われたことを検出したら、制動制御を解除している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2003−175810号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
従来技術のように、自動制御中に、操作者による解除操作を検出したら、自動制御を解除する意思が操作者にあると判断して、自動制御を解除してしまう場合、操作者の誤操作が問題となる。すなわち、操作者が誤って解除操作を行ってしまったとしても、自動制御が解除されてしまうことになり、この場合、結果として、操作者の意思に反して自動制御が解除されてしまうことになってしまうという問題があった。
【0006】
本発明は、この事情に基づいて成されたものであり、その目的とするところは、操作者の意思に反して自動制御が解除されてしまうことを抑制できる自動制御装置を提供することにある。
【課題を解決するための手段】
【0007】
その目的を達成するための請求項1記載の発明によれば、自動制御中に操作者が誤って解除操作をしてしまった場合であっても、誤操作判定手段により、その解除操作が誤操作であると判定された場合には、制御解除手段は自動制御を解除しないことから、操作者の意思に反して自動制御が解除されてしまうことを抑制できる。
【0008】
請求項2記載の発明は、自動車に搭載される自動制御装置に適用されるものであり、自動制御手段は、自動車の車両挙動を自動的に制御する必要があると判定した場合には、自動車に搭載された車両制御装置を制御して、車両挙動を自動的に制御する自動車両制御を行う。また、制御解除手段における予め定められた解除操作は、自動車両制御による車両挙動とは相容れない車両挙動を指示する操作となっている。よって、解除操作が行われた場合に、自動車両制御と、解除操作が指示する車両挙動の両方を行うことはできないので、原則として、自動制御を解除し、解除操作が指示する車両挙動を実行する。しかし、自動車両制御中に解除操作が行われても、誤操作検出手段によってその解除操作が誤操作であると判定されれば、自動車両制御は解除されずに継続される。よって、操作者が、本来の自分の意図とは違う誤った操作をしてしまっても、操作者の意思に反して自動制御が解除されてしまうことを抑制できる。
【0009】
なお、自動車両制御による車両挙動とは相容れない車両挙動を指示する解除操作とは、解除操作が指示する車両挙動が、自動車両制御による車両挙動と同じ物理量を変化させることを指示するものであり、たとえば、請求項3、8、10記載のものがある。請求項3では、自動車両制御、解除操作とも加速度の変化であり、しかも、自動車両制御と解除操作は互いに反対方向に加速度を変化させる。また、請求項8では、自動車両制御、解除操作とも転舵角の変化である。解除操作は、自動車両制御によってある角度とされた転舵角をさらに変化させる操作であるから、両者は相容れない。また、請求項10では、自動車両制御は、ブレーキペダルが踏まれた状態でのクリープ走行中に行う制御であるのに対して、解除操作は、ブレーキペダルを離したことであるので、両者は相容れない。
【0010】
請求項3記載の発明は、自動車に搭載される自動制御装置に適用されるものであり、自動制御手段は、自動車に自動的に制動力を発生させる必要があると判定した場合には、自動車に搭載された制動装置を制御して自動的に制動力を発生させる自動制動制御を行う。この自動制動制御中に、運転者が誤ってアクセルを所定量以上踏み込んでしまった場合であっても、誤操作判定手段によってそのアクセル操作が誤操作であると判定されれば、自動制動制御は解除されずに継続される。よって、運転者の意思に反して自動制動制御が解除されてしまうことを抑制できる。
【0011】
また、請求項4のように、アクセルペダルの踏み込み操作が誤操作であったと判定された場合、一度、アクセルペダルの踏み込み量が所定量以下となった後でなければ、アクセルペダルの踏み込み量が所定量以上であっても、自動制御を解除しないようにすることが好ましい。このようにすれば、一度、誤操作と判定されれば、誤操作であったアクセルペダルの踏み込み操作が継続していても、自動制動制御が解除されてしまうことを抑制できる。
【0012】
また、誤操作判定手段は、たとえば請求項4のように、アクセルペダルの踏み込み量、アクセルペダルの踏み込み速度、前方の障害物までの距離、運転者の姿勢の少なくとも一つに基づいて、前記解除操作が誤操作であったか否かを判定するようにすればよい。
【0013】
これらのうち、解除操作と同じアクセルペダル操作に基づいて誤操作を判定する場合には、請求項6のように、アクセルペダルの踏み込み量が、自動制動制御を解除する所定量よりも大きい量に設定された基準踏み込み量以上であることに基づいて、解除操作が誤操作であったと判定したり、あるいは、請求項7のように、アクセルペダルの踏み込み速度が基準踏み込み速度よりも速いことに基づいて、解除操作が誤操作であったと判定することができる。
【0014】
請求項8記載の発明も、自動車に搭載される自動制御装置に適用されるものであり、自動制御手段は、自動車の車輪の転舵角を自動で制御する自動操舵制御を行う。この自動操舵制御中に、運転者が誤って所定角度以上のステアリングホイール操作をしてしまった場合であっても、誤操作判定手段によってそのステアリングホイール操作が誤操作であると判定されれば、自動操舵制御が解除されずに継続される。よって、運転車の意思に反して自動操舵制御が解除されてしまうことが抑制できる。
【0015】
また、請求項8において、誤操作判定手段は、たとえば請求項9のように、運転者が電装品を操作していること、運転者が居眠り状態にあること、運転者によるステアリングホイールの操作方向に障害物が存在すること、の少なくとも一つに基づいて、解除操作が誤操作であったか否かを判定するようにすればよい。
【0016】
請求項10記載の発明も、自動車に搭載される自動制御装置に適用されるものであり、自動制御手段は、駐車完了位置が設定された後のブレーキペダルが踏まれた状態でのクリープ走行中に、駐車完了位置に自動車が向かうように自動車の車輪の転舵角を自動的に制御する駐車支援制御を行う。この駐車支援制御中に運転者が誤ってブレーキペダルを離してしまった場合であっても、誤操作判定手段によってブレーキペダルを離した操作が誤操作であると判定されれば、駐車支援制御は解除されずに継続される。よって、運転者の意思に反して駐車支援制御が解除されてしまうことが抑制できる。
【0017】
また、請求項10において、誤操作判定手段は、たとえば請求項11のように、ブレーキペダルが初期位置へ戻る速度が所定速度以上であること、および、運転者がブレーキペダルを踏み外しやすい姿勢であることを検出したことの少なくともいずれか一方に基づいて、前記解除操作が誤操作であったか否かを判定するようにすればよい。
【図面の簡単な説明】
【0018】
【図1】本発明の要旨を示すフローチャートである。
【図2】本発明の第1実施形態の自動制動制御装置10を含む自動制動制御システム1の構成を示すブロック図である。
【図3】自動制動制御装置10の機能を示すブロック図である。
【図4】第2実施形態の自動操舵制御装置110を含む自動操舵制御システム100の構成を示すブロック図である。
【図5】自動操舵制御装置110の機能を示すブロック図である。
【図6】第3実施形態の駐車支援装置210を含む駐車支援システム200の構成を示すブロック図である。
【図7】駐車支援装置210の機能を示すブロック図である。
【発明を実施するための形態】
【0019】
最初に本発明の要旨を説明する。図1は、本発明の要旨を示すフローチャートである。この図1に示すように、自動制御が行われている状態では、解除操作があったか否かを判断する(ステップS1)。解除操作がない場合にはステップS1が否定判断となり、自動制御を継続する。一方、解除操作があった場合には、それのみによって自動制御を解除してしまうのではなく、ステップS2の判断を行う。ステップS2では、解除操作が誤操作であったか否かをさらに判断する。判断結果が肯定判断である場合、すなわち、解除操作が誤操作であったと判断した場合には、自動制御を解除せずに、その自動制御を継続する。一方、解除操作が誤操作でないと判断した場合は、自動制御を解除する。
【0020】
次に、具体的な実施形態を図面に基づいて説明する。図2は、本発明の第1実施形態の自動制動制御装置10を含む自動制動制御システム1の構成を示すブロック図である。この自動制動制御システム1は、自動車(以下では車両ともいう)に搭載されるものであって、自動制動制御装置10の他に、制動装置20、状態検出装置30、アクセルペダル40を有している。
【0021】
制動装置20は、自動制動制御装置10の制御対象装置であり、自動制動制御装置10によって制御されて車両の車輪50を制動する制動力を発生する。
【0022】
状態検出装置30は、車両内外の予め定められた種々の状態を検出する装置であり、制動装置20を制御して自動的に制動力を発生させる必要があるか否かを判断するために用いる種々の状態を検出する。制動装置20を制御して自動的に制動力を発生させる必要がある状況には、たとえば、このままの走行では障害物と衝突してしまう可能性が高い状況、このままの走行では転落する可能性が高い状況、運転者が運転を継続できない状態に陥った状況、法規等により減速または停止を行わなければならない状況(信号が赤の場合など)などがある。これらの状況であるか否かを判断するために必要な状態としては、たとえば、車速、進行方向の障害物の存在およびその障害物までの距離、ブレーキ操作の有無、走行予測経路、進行方向の路面の段差、運転者の覚醒状態、道路標識や道路標示の有無およびその種類などがある。さらに、状態検出装置30は、自動制動制御を運転者が解除する解除操作が誤操作であるか否かを判定するための状態(たとえば、運転者の姿勢)も検出する。状態検出装置30は、これらの状態を、光、音、電波、電気信号を一種類または複数種類用いて検出する。そして、検出した状態を自動制動制御装置10へ送る。
【0023】
また、自動制動制御装置10は、アクセルペダル40からアクセルペダル操作量(すなわちアクセルペダル踏み込み量)を示す信号を逐次取得する。なお、アクセルペダル操作量を示す信号は、アクセルペダル40に取り付けられたセンサによって検出されるものでもよいし、また、アクセルペダル操作量に応じて変化するスロットル開度をこの信号としてもよい。
【0024】
自動制動制御装置10は、図示しない内部に、CPU、ROM、RAM等を備えたコンピュータであり、CPUが、RAMの一時記憶機能を利用しつつROMに記憶されたプログラムを実行することで図3に示す種々の手段として機能する。
【0025】
次に、自動制動制御装置10の機能を図3を用いて説明する。自動制動制御装置10は、図3に示すように、自動制動制御手段11、制御解除手段12、誤操作判定手段13を備えている。
【0026】
自動制動制御手段11は、状態検出装置30から送られてきた種々の状態に基づいて、制動装置20を制御して自動的に制動力を発生させる必要がある状況であるか否かを逐次判断する。そして、制動力を発生させる必要があると判断した場合には、制動装置20に制御信号を送信することで、制動装置20に自動的に制動力を発生させる自動制動制御を行う。
【0027】
制御解除手段12は、自動制動制御手段11から自動制動制御を実行中か否かを示す制御状態信号を取得し、また、アクセルペダル操作量も取得する。そして、自動制動制御手段11による自動制動制御中は、制御解除操作が行われたか否か、すなわち、アクセルペダル操作量が所定量以上となったか否かの判定を繰り返し行う。そして、アクセルペダル操作量が所定量以上となったと判定した場合であって、誤操作判定手段13から、誤操作と判定したことを示す判定結果を取得しなかった場合には、自動制動制御を解除させる解除信号を自動制動制御手段11へ出力する。
【0028】
なお、制御解除手段12は、誤操作判定手段13からの判定結果を取得するために、解除信号を、まず、誤操作判定手段13へ送信する。その後、極短時間に設定されている所定時間内において、誤操作と判定したことを示す判定結果を取得するか否かを判断する。そして、誤操作判定手段13から誤操作ではないとの判定結果を取得した場合に限らず、誤操作と判定したことを示す判定結果を取得しない場合も、誤操作と判定したことを示す判定結果を取得しなかったと判断する。
【0029】
自動制動制御手段11は、制御解除手段12から解除信号を取得した場合には自動制動制御を解除(中止)する。このようにするのは、アクセルペダル40が操作されたのは運転者に加速の意思があるからだと考えるからであり、自動制御よりも運転者の意思を優先させることを原則的な考えとしているからである。なお、自動制動制御を解除するとは、制動装置20への制御信号の出力を中止することである。
【0030】
ところで、運転者が誤ってアクセルペダル40を踏んでしまうことも考えられる。そこで、本実施形態では、誤操作判定手段13を備えている。誤操作判定手段13は、制御解除手段12から解除信号を取得する。そして、解除信号を取得したら、運転者のアクセルペダル操作が誤操作であったか否かを判定する。判定には、具体的には、アクセルペダル40の操作量、アクセルペダル40の踏み込み速度、前方障害物までの距離、運転者の姿勢の少なくとも一つを用いる。これらのうちのどれを用いるかは予め設定されている。なお、アクセルペダルの誤操作判定装置には、例えば特開平1−78939号公報に記載の装置などが知られており、本発明でも、公知の種々のアクセルペダル誤操作判定手法を用いることができる。
【0031】
アクセルペダル40の操作量、アクセルペダル40の踏み込み速度は、アクセルペダル40から逐次供給されるアクセルペダル操作量に基づいて決定する。そして、アクセルペダル40の操作量が、制動制御を解除する判定に用いる所定量よりも十分に大きい誤判定基準操作量以上である場合や、アクセルペダル40の踏み込み速度が誤判定基準踏み込み速度よりも大きい場合には、アクセル操作は誤操作であったと判定する。アクセルペダル40は、通常、ブレーキペダルに比べて、それほど大きく踏み込むことはなく、また、それほど速い速度で踏み込むこともない。上記誤判定基準操作量や誤判定基準踏み込み速度は、通常のアクセルペダル40の操作量と踏み込み速度よりも大きく、急ブレーキあるいはそれに近いブレーキ操作におけるブレーキペダル操作量や踏み込み速度よりも小さくなるように設定されている。
【0032】
前方障害物までの距離、運転者の姿勢は、状態検出装置30が検出した状態に基づいて決定する。そして、前方障害物までの距離が予め設定された衝突危険距離よりも短い場合には、アクセル操作は誤操作であったと判定する。なお、衝突危険距離は、一定値でもよいし、また、車速に応じて変化する距離としてもよい。また、運転者の姿勢が、通常の前進走行の運転姿勢とは異なる姿勢(たとえば、後方を確認する姿勢や助手席に手を伸ばした姿勢)を検出した場合に、アクセル操作は誤操作であったと判定する。
【0033】
そして、誤操作判定手段13は、運転者のアクセルペダル操作が誤操作であったと判定した場合は、誤操作と判定したことを示す判定結果を制御解除手段12に出力する。また、誤操作でないと判定した場合にも、そのことを示す判定結果を制御解除手段12に出力するようにしてもよい。
【0034】
誤操作判定手段13から誤操作と判定したことを示す判定結果を取得した制御解除手段12は、アクセルペダル操作量が所定量以上となった場合であっても、解除信号を出力しない。よって、自動制動制御手段11は、自動制動制御を継続することになる。この自動制動制御が実行されている間は、運転者のアクセルペダル操作は無効化して、アクセルペダル40が踏まれていても車両の加速は行わず、自動制動制御による制動制御を行う。
【0035】
なお、誤操作判定手段13は、解除信号を取得している間、すなわち、アクセルペダル操作量が所定量以上となっている間は、継続的に、アクセルペダル操作が誤操作であったか否かを判定する。
【0036】
しかし、一度、誤操作が判定された後、アクセルペダル40が誤って踏み込まれている状態が継続していても、誤操作との判定は継続しないことも考えられる。たとえば、アクセルペダル40の操作量が、一旦は、誤判定基準操作量を超えたが、やや戻されて、誤判定基準操作量以下だが制御解除の判定基準となっている所定量よりは大きい場合や、アクセルペダル40が一気に踏み込まれて、踏み込まれた位置でアクセルペダル40が保持された場合には、誤操作であるにもかかわらず、誤操作との判定は継続しない。したがって、アクセルペダル40が誤って踏み込まれている状態が継続していると、自動制動制御が解除されて、急に、アクセルペダル40の誤操作に起因する加速が行われてしまう可能性もある。
【0037】
そこで、制御解除手段12は、誤操作判定手段13によりアクセルペダル40の踏み込み操作が誤操作であったと判定された場合、すなわち、一旦、誤操作であるとの判定結果を取得した場合、制御解除判定の基準となる所定量以下までアクセルペダル40の操作量が戻されるまでは、アクセルペダル40の操作量が所定量以上であっても、誤操作の状態が継続しているとして、自動制動制御を解除する操作が行われたか否かの判定を中止する。この判定を中止する結果、アクセルペダル40が所定量以下に戻された後でなければ、アクセルペダル40の操作量が所定量以上であっても解除信号を自動制動制御手段11に出力しないことになる。これにより、アクセルペダル40が誤って踏み込まれている状態が継続していても、急に、アクセルペダル40の誤操作に基づく加速が行われてしまうことが抑制される。
【0038】
以上、説明した第1実施形態によれば、自動制動制御中に運転者が誤ってアクセルペダル40を所定量以上踏み込んでしまった場合であっても、誤操作判定手段13により、その解除操作が誤操作であると判定された場合には、制御解除手段12は、自動制動制御を解除させる解除信号を自動制動制御手段11へ出力しない。よって、運転者の意思に反して自動制動制御が解除されてしまうことを抑制できる。
【0039】
次に、第2実施形態を説明する。図4は、第2実施形態の自動操舵制御装置110を含む自動操舵制御システム100の構成を示すブロック図である。この自動操舵制御システム100も自動車に搭載されるものであって、自動操舵制御装置110の他に、操舵アクチュエータ120、車線検出装置130、状態検出装置140、ステアリングホイール150を有している。
【0040】
操舵アクチュエータ120は、図示しない操舵軸あるいはラック軸に設けられて、その軸を軸回りに回転させるモータであり、この操舵アクチュエータ120を制御することにより、車輪50の転舵角を制御することができる。
【0041】
車線検出装置130は、車両が走行中の車線を区画する車線区画線(白線等)を検出するものであり、たとえば、レーザレーダや車載カメラを車線検出装置130として用いる。
【0042】
状態検出装置140は、車両内外の予め定められた種々の状態を検出する装置であり、自動操舵制御を運転者が解除する解除操作が誤操作であるか否かを判定するための状態(たとえば、運転者の居眠り状態)を検出する。そして、検出した状態を示す信号を自動操舵制御装置110へ送る。
【0043】
自動操舵制御装置110は、図示しない内部に、CPU、ROM、RAM等を備えたコンピュータであり、CPUが、RAMの一時記憶機能を利用しつつROMに記憶されたプログラムを実行することで図5に示す種々の手段として機能する。
【0044】
次に、自動操舵制御装置110の機能を図5を用いて説明する。自動操舵制御装置110は、図5に示すように、自動操舵制御手段111、制御解除手段112、誤操作判定手段113を備えている。
【0045】
自動操舵制御手段111は、自動操舵制御の指示が運転者から行われた場合に、自動操舵制御を行う。この自動操舵制御は、走行中の車線を車両が逸脱しないように、車輪50の転舵角を自動的に制御する制御である。より詳しくは、この自動操舵制御中は、自車位置に対する車線区画線の位置を、車線検出装置130からの信号により逐次判断する。そして、自車が現在の車線を逸脱しそうであると判断した場合には、操舵アクチュエータ120に制御信号を出力して操舵アクチュエータ120に操舵トルクを発生させて、現在の車線を逸脱しない方向に車輪50の転舵角を制御する。
【0046】
制御解除手段112は、自動操舵制御手段111から自動操舵制御を実行中か否かを示す制御状態信号を逐次取得し、また、ステアリングホイール150の回転位置も逐次取得する。そして、自動操舵制御手段111による自動操舵制御中に、運転者によってステアリングホイール150が所定角度以上操作された場合であって、誤操作判定手段113から、誤操作と判定したことを示す判定結果を取得しなかった場合には、自動操舵制御を解除させる解除信号を自動操舵制御手段111へ出力する。なお、誤操作と判定しなかった場合とは、第1実施形態と同様に、誤操作ではないとの判定結果を取得した場合に限らず、所定時間内に誤操作と判定したことを示す判定結果を取得しない場合も含まれる。
【0047】
自動操舵制御手段111は、制御解除手段112から解除信号を取得した場合には自動操舵制御を解除(中止)する。しかし、運転者のステアリングホイール150の操作が誤操作であることも考えられるので、誤操作判定手段113を備えている。誤操作判定手段113は、制御解除手段112から解除信号を取得する。そして、解除信号を取得したら、運転者のステアリングホイール150の操作が誤操作であったか否かを判定する。判定は、具体的には、運転者が電装品を操作している状態かどうか、運転者の覚醒状態、障害物の相対位置の少なくとも一つを用いる。これらのうちどれを用いるかは予め設定されている。
【0048】
運転者が電装品を操作している状態かどうかは、運転者の姿勢から判定する。運転者の姿勢は、運転者を撮影する車室内カメラの画像を解析することで判定する。また、座席に設けた複数の圧力センサの検出値に基づいて判定してもよい。この運転者の姿勢に加えて、電装品が操作されたことを示す信号、および、その電装品の操作部の位置が運転席に近いか否かも考慮して、運転者が電装品を操作している状態かどうかを判定してもよい。そして、運転者が電装品を操作している状態と判定したら、ステアリングホイール150の操作は、電装品を操作しようとした際に誤って操作してしまった、すなわち、自動操舵制御を解除するステアリング操作は誤操作であったと判定する。
【0049】
運転者の覚醒状態は、たとえば、車室内カメラにより撮影した運転者の顔の画像を解析することで判定する。また、脈波等の生体信号に基づいて判定してもよい。そして、運転者が覚醒状態でないと判定したら、自動操舵制御を解除するステアリング操作は誤操作であったと判定する。
【0050】
障害物の相対位置は、レーダやカメラ画像により判定する。そして、ステアリングホイール150の操作方向が障害物の相対位置の方向であった場合、障害物の方向に向けて車両を進行させようとすることは考えられないことから、自動操舵制御を解除するステアリング操作は誤操作であったと判定する。
【0051】
このようにして、ステアリングホイール150の操作が誤操作であったと判定した場合は、誤操作判定手段113は、誤操作と判定したことを示す判定結果を制御解除手段112に出力する。また、誤操作でないと判定した場合にも判定結果を出力するようにしてもよい。
【0052】
誤操作判定手段113から誤操作と判定したことを示す判定結果を取得した制御解除手段112は、運転者によりステアリングホイール150が所定角度以上操作されても、解除信号を出力しない。よって、自動操舵制御手段111は、自動操舵制御を継続することになる。この自動操舵制御が実行されている間は、運転者のステアリングホイール操作は無効化して、自動操舵制御による操舵制御を行う。
【0053】
以上、説明した第2実施形態によれば、自動操舵制御中に、運転者が誤って所定角度以上のステアリングホイール操作をしてしまった場合であっても、誤操作判定手段113によってそのステアリングホイール操作が誤操作であると判定されれば、自動操舵制御が解除されずに継続される。よって、運転車の意思に反して自動操舵制御が解除されてしまうことが抑制できる。
【0054】
次に、第3実施形態を説明する。図6は、第3実施形態の駐車支援装置210を含む駐車支援システム200の構成を示すブロック図である。この駐車支援システム200も自動車に搭載されるものであって、駐車支援装置210の他に、第2実施形態のものと同じ操舵アクチュエータ120、車外状態検出装置220、車内状態検出装置230を有している。
【0055】
車外状態検出装置220は、車両外の予め定められた種々の状態を検出する装置であり、駐車支援制御を実行するために必要な車両外の状態を検出する。そして、検出した状態を示す信号を駐車支援装置210へ送る。
【0056】
車内状態検出装置230は、車両内の予め定められた種々の状態を検出する装置であり、駐車支援制御を運転者が解除する解除操作が誤操作であるか否かを判定するために必要な車両内の状態を検出する。そして、検出した状態を示す信号を駐車支援装置210へ送る。
【0057】
駐車支援装置210は、図示しない内部に、CPU、ROM、RAM等を備えたコンピュータであり、CPUが、RAMの一時記憶機能を利用しつつROMに記憶されたプログラムを実行することで図7に示す種々の手段として機能する。
【0058】
次に、駐車支援装置210の機能を図7を用いて説明する。駐車支援装置210は、図7に示すように、駐車支援制御手段211、制御解除手段212、誤操作判定手段213を備えている。
【0059】
駐車支援制御手段211は、駐車支援制御の指示が運転者から行われ、かつ、運転者によって駐車完了位置が指定された場合に、駐車支援制御を行う。この駐車支援制御は、駐車完了位置に車両が向かうように車輪の転舵角を自動的に制御する制御である。
【0060】
より詳しく駐車支援制御を説明すると、運転者が駐車完了位置を指定する操作は、車載カメラによって撮影された画像が車内のディスプレイに表示され、そのディスプレイ上にて駐車完了位置を指定する操作である。このようにして、駐車完了位置が指定されると、駐車支援制御手段211は、駐車完了位置に対する自車の位置・向きを把握する。そして、運転者がブレーキペダルの踏力を弱めて車両がクリープ走行を開始すると、車速および車輪50の転舵角を逐次検出することにより、駐車完了位置に対する自車の位置・向きを逐次把握する。そして、把握した駐車完了位置に対する自車の向きから、自車が駐車完了位置に向かうための車輪50の転舵角を決定し、その転舵角となるように、操舵アクチュエータ120に制御信号を出力する。
【0061】
上記駐車支援制御は、車両の速度調節は運転者が行うようになっており、速度調節を運転者が行わなかった場合や速度調節を誤った場合には、制御解除手段212からの解除信号により、制御を解除するようになっている。
【0062】
その制御解除手段212は、ブレーキペダル70の踏み込み量を示す信号および車速を逐次取得し、駐車支援制御中に、ブレーキペダル70が離されたことを検出した場合、または、車速が所定車速以上となった場合であって、誤操作判定手段213から、誤操作と判定したことを示す判定結果を取得しなかった場合には、駐車支援制御を解除させる解除信号を駐車支援制御手段211へ出力する。なお、誤操作と判定しなかった場合とは、第1実施形態と同様に、誤操作ではないとの判定結果を取得した場合に限らず、所定時間内に誤操作と判定したことを示す判定結果を取得しない場合も含まれる。
【0063】
駐車支援制御手段211は、制御解除手段212から解除信号を取得した場合には駐車支援制御を解除(中止)する。しかし、運転者が誤ってブレーキペダル70を離してしまうことも考えられるので、誤操作判定手段213を備えている。誤操作判定手段213は、制御解除手段212から解除信号を取得する。そして、解除信号を取得したら、運転者がブレーキペダル70を離した操作が誤操作であったか否かを判定する。判定は、具体的には、ブレーキペダル70が初期位置へ戻る速度、および、運転者の姿勢のいずれか一方または両方に基づいて行う。これらのうちどれを用いるかは予め設定されている。
【0064】
ブレーキペダル70が初期位置へ戻る速度は、ブレーキ油圧の変化速度から決定する。また、ブレーキペダル70にストロークセンサを設け、そのストロークセンサからの信号に基づいて決定してもよい。そして、ブレーキペダル70を離す速度が、ブレーキペダル70を踏み外してしまったと判断できる程度の速い速度であった場合には、ブレーキペダル70を離した操作は誤操作であったと判定する。
【0065】
運転者の姿勢は、第2実施形態と同様にして決定する。そして、決定した運転者の姿勢がブレーキペダル70を踏み外しやすい姿勢(たとえば後ろを向いているなど)であった場合には、ブレーキペダル70を離した操作は誤操作であったと判定する。
【0066】
このようにして、運転者がブレーキペダル70を離した操作誤操作であったと判定した場合は、誤操作判定手段213は、誤操作と判定したことを示す判定結果を制御解除手段212に出力する。また、誤操作でないと判定した場合にも判定結果を出力するようにしてもよい。
【0067】
誤操作判定手段213から誤操作と判定したことを示す判定結果を取得した制御解除手段212は、ブレーキペダル70が離されても解除信号を出力しない。よって、駐車支援制御手段211は駐車支援制御を継続することになる。
【0068】
以上、説明した第3実施形態によれば、駐車支援制御中に運転者が誤ってブレーキペダル70を離してしまった場合であっても、誤操作判定手段213によってブレーキペダル70を離した操作が誤操作であると判定されれば、駐車支援制御は解除されずに継続される。よって、運転者の意思に反して駐車支援制御が解除されてしまうことが抑制できる。
【0069】
以上、本発明の実施形態を説明したが、本発明は上述の実施形態に限定されるものではなく、次の実施形態も本発明の技術的範囲に含まれ、さらに、下記以外にも要旨を逸脱しない範囲内で種々変更して実施することができる。
【0070】
たとえば、前述の実施形態では、誤操作判定手段13、113、213は、制御解除手段12、112、212から解除信号を取得したことにより誤操作の判定を開始していたが、制御解除手段12、112、212が制御解除と判定するのと同じ条件により、誤操作の判定を開始するようにしてもよい。
【0071】
また、前述の第1実施形態では、一旦、誤操作である判定した場合に、自動制動制御を解除する操作が行われたか否かの判定を再開する条件は、アクセルペダル40の操作量が所定量以下まで戻されることであったが、これに限られない。たとえば、予め定められた時間が経過したら、自動制動制御を解除する操作が行われたか否かの判定を再開するようにしてもよい。
【0072】
また、前述の3つの実施形態はいずれも車両用であったが、本発明は車両用以外にも適用可能である。また、前述の第1〜第3実施形態のうち、いずれか2つ、または3つ全ての機能を備えた自動制御装置を構成してもよい。
【符号の説明】
【0073】
1:自動制動制御システム、 10:自動制動制御装置、 11:自動制動制御手段、 12:制御解除手段、 13:誤操作判定手段、 20:制動装置、 30:状態検出装置、 40:アクセルペダル、 50:車輪、 100:自動操舵制御システム、 110:自動操舵装置、 111:自動操舵制御手段、 112:制御解除手段、 113:誤操作判定手段、 120:操舵アクチュエータ、 130:車線検出装置、 140:状態検出装置、 150:ステアリングホイール、 200:駐車支援システム、 210:駐車支援装置、 211:駐車支援制御手段、 212:制御解除手段、 213:誤操作判定手段、 220:車外状態検出装置、 230:車内状態検出装置
【特許請求の範囲】
【請求項1】
所定の自動制御を行う自動制御手段と、予め定められた解除操作が操作者によって自動制御中に行われたことに基づいて自動制御を解除する制御解除手段とを備えた自動制御装置であって、
前記解除操作が誤操作であったか否かを判定する誤操作判定手段を備え、
前記制御解除手段は、前記解除操作が行われた場合であっても、前記誤操作判定手段によってその解除操作が誤操作だと判定された場合には自動制御を解除せず、自動制御手段による自動制御を継続させることを特徴とする自動制御装置。
【請求項2】
請求項1において、
前記自動制御装置は自動車に搭載されるものであって、
前記自動制御手段は、前記自動車の車両挙動を自動的に制御する事が必要であると判定した場合に、前記自動車に搭載された車両制御装置を制御して自動的に車両挙動を制御する自動車両制御を行い、
前記制御解除手段における予め定められた解除操作が、前記自動車両制御による車両挙動とは相容れない車両挙動を指示する操作であることを特徴とする自動制御装置。
【請求項3】
請求項2において、
前記自動制御手段は、前記自動車に自動的に制動力を発生させる必要があると判定した場合に、前記自動車に搭載された制動装置を制御して自動的に制動力を発生させる自動制動制御であり、
前記制御解除手段における予め定められた解除操作が、アクセルペダルが所定量以上踏み込まれたことである、ことを特徴とする自動制御装置。
【請求項4】
請求項3において、
前記制御解除手段は、前記誤操作判定手段によりアクセルペダルの踏み込み操作が誤操作であったと判定された場合、一度、アクセルペダルの踏み込み量が前記所定量以下となった後でなければ、アクセルペダルの踏み込み量が前記所定量以上であっても、自動制動制御を解除しないことを特徴とする自動制御装置。
【請求項5】
請求項3または4において、
前記誤操作判定手段は、アクセルペダルの踏み込み量、アクセルペダルの踏み込み速度、前方の障害物までの距離、運転者の姿勢の少なくとも一つに基づいて、前記解除操作が誤操作であったか否かを判定することを特徴とする自動制御装置。
【請求項6】
請求項5において、
前記誤操作判定手段は、アクセルペダルの踏み込み量に基づいて前記解除操作が誤操作であったか否かを判定するものであって、アクセルペダルの踏み込み量が、自動制動制御を解除する所定量よりも大きい量に設定された基準踏み込み量以上であることに基づいて、前記解除操作が誤操作であったと判定することを特徴とする自動制御装置。
【請求項7】
請求項5において、
前記誤操作判定手段は、アクセルペダルの踏み込み速度に基づいて前記解除操作が誤操作であったか否かを判定するものであって、アクセルペダルの踏み込み速度が基準踏み込み速度よりも速いことに基づいて、前記解除操作が誤操作であったと判定することを特徴とする自動制御装置。
【請求項8】
請求項2において、
前記自動制御手段は、前記自動車の車輪の転舵角を自動で制御する自動操舵制御であり、
前記制御解除手段における予め定められた解除操作が、ステアリングホイールが運転者によって所定角度以上操作されたことである、ことを特徴とする自動制御装置。
【請求項9】
請求項8において、
前記誤操作判定手段は、運転者が電装品を操作していること、運転者が居眠り状態にあること、運転者によるステアリングホイールの操作方向に障害物が存在すること、の少なくとも一つに基づいて、前記解除操作が誤操作であったか否かを判定することを特徴とする自動制御装置。
【請求項10】
請求項2において、
前記自動制御手段は、駐車完了位置が設定された後のブレーキペダルが踏まれた状態でのクリープ走行中に、前記駐車完了位置に自動車が向かうように自動車の車輪の転舵角を自動的に制御する駐車支援制御であり、
前記制御解除手段における予め定められた解除操作が、運転者がブレーキペダルを離したことを検出したことである、ことを特徴とする自動制御装置。
【請求項11】
請求項10において、
前記誤操作判定手段は、ブレーキペダルが初期位置へ戻る速度が所定速度以上であること、および、運転者がブレーキペダルを踏み外しやすい姿勢であることを検出したことの少なくともいずれか一方に基づいて、前記解除操作が誤操作であったか否かを判定することを特徴とする自動制御装置。
【請求項1】
所定の自動制御を行う自動制御手段と、予め定められた解除操作が操作者によって自動制御中に行われたことに基づいて自動制御を解除する制御解除手段とを備えた自動制御装置であって、
前記解除操作が誤操作であったか否かを判定する誤操作判定手段を備え、
前記制御解除手段は、前記解除操作が行われた場合であっても、前記誤操作判定手段によってその解除操作が誤操作だと判定された場合には自動制御を解除せず、自動制御手段による自動制御を継続させることを特徴とする自動制御装置。
【請求項2】
請求項1において、
前記自動制御装置は自動車に搭載されるものであって、
前記自動制御手段は、前記自動車の車両挙動を自動的に制御する事が必要であると判定した場合に、前記自動車に搭載された車両制御装置を制御して自動的に車両挙動を制御する自動車両制御を行い、
前記制御解除手段における予め定められた解除操作が、前記自動車両制御による車両挙動とは相容れない車両挙動を指示する操作であることを特徴とする自動制御装置。
【請求項3】
請求項2において、
前記自動制御手段は、前記自動車に自動的に制動力を発生させる必要があると判定した場合に、前記自動車に搭載された制動装置を制御して自動的に制動力を発生させる自動制動制御であり、
前記制御解除手段における予め定められた解除操作が、アクセルペダルが所定量以上踏み込まれたことである、ことを特徴とする自動制御装置。
【請求項4】
請求項3において、
前記制御解除手段は、前記誤操作判定手段によりアクセルペダルの踏み込み操作が誤操作であったと判定された場合、一度、アクセルペダルの踏み込み量が前記所定量以下となった後でなければ、アクセルペダルの踏み込み量が前記所定量以上であっても、自動制動制御を解除しないことを特徴とする自動制御装置。
【請求項5】
請求項3または4において、
前記誤操作判定手段は、アクセルペダルの踏み込み量、アクセルペダルの踏み込み速度、前方の障害物までの距離、運転者の姿勢の少なくとも一つに基づいて、前記解除操作が誤操作であったか否かを判定することを特徴とする自動制御装置。
【請求項6】
請求項5において、
前記誤操作判定手段は、アクセルペダルの踏み込み量に基づいて前記解除操作が誤操作であったか否かを判定するものであって、アクセルペダルの踏み込み量が、自動制動制御を解除する所定量よりも大きい量に設定された基準踏み込み量以上であることに基づいて、前記解除操作が誤操作であったと判定することを特徴とする自動制御装置。
【請求項7】
請求項5において、
前記誤操作判定手段は、アクセルペダルの踏み込み速度に基づいて前記解除操作が誤操作であったか否かを判定するものであって、アクセルペダルの踏み込み速度が基準踏み込み速度よりも速いことに基づいて、前記解除操作が誤操作であったと判定することを特徴とする自動制御装置。
【請求項8】
請求項2において、
前記自動制御手段は、前記自動車の車輪の転舵角を自動で制御する自動操舵制御であり、
前記制御解除手段における予め定められた解除操作が、ステアリングホイールが運転者によって所定角度以上操作されたことである、ことを特徴とする自動制御装置。
【請求項9】
請求項8において、
前記誤操作判定手段は、運転者が電装品を操作していること、運転者が居眠り状態にあること、運転者によるステアリングホイールの操作方向に障害物が存在すること、の少なくとも一つに基づいて、前記解除操作が誤操作であったか否かを判定することを特徴とする自動制御装置。
【請求項10】
請求項2において、
前記自動制御手段は、駐車完了位置が設定された後のブレーキペダルが踏まれた状態でのクリープ走行中に、前記駐車完了位置に自動車が向かうように自動車の車輪の転舵角を自動的に制御する駐車支援制御であり、
前記制御解除手段における予め定められた解除操作が、運転者がブレーキペダルを離したことを検出したことである、ことを特徴とする自動制御装置。
【請求項11】
請求項10において、
前記誤操作判定手段は、ブレーキペダルが初期位置へ戻る速度が所定速度以上であること、および、運転者がブレーキペダルを踏み外しやすい姿勢であることを検出したことの少なくともいずれか一方に基づいて、前記解除操作が誤操作であったか否かを判定することを特徴とする自動制御装置。
【図1】


【図2】
【図3】

【図4】

【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−111263(P2012−111263A)
【公開日】平成24年6月14日(2012.6.14)
【国際特許分類】
【出願番号】特願2010−259377(P2010−259377)
【出願日】平成22年11月19日(2010.11.19)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成24年6月14日(2012.6.14)
【国際特許分類】
【出願日】平成22年11月19日(2010.11.19)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]