
自動化されたビームのレイアウト
【課題】 自動化されたビームのレイアウトを改良する。
【解決手段】 自動化されたビームのレイアウトのためのシステムであって、前記システムは以下を備える:
境界ポジション・モジュールであって、
画像フレームの境界に沿って複数の境界ポジションを生成するため、及び
複数のビーム・ロケーションに基づいて前記複数の境界ポジションを改変するため
に設計された該モジュール;並びに
ビーム・ロケーション・モジュールであって、前記複数のビーム・ロケーションはそれぞれ前記画像フレームの前記境界内にあり、前記複数の境界ポジションと、並びにマッピング優先度、ビーム・プラットフォームの動く方向、及び前記ビーム・プラットフォームの動く速さのうちの少なくとも1つとに基づいて、前記複数のビーム・ロケーションを決定するために設計された該モジュール。
【解決手段】 自動化されたビームのレイアウトのためのシステムであって、前記システムは以下を備える:
境界ポジション・モジュールであって、
画像フレームの境界に沿って複数の境界ポジションを生成するため、及び
複数のビーム・ロケーションに基づいて前記複数の境界ポジションを改変するため
に設計された該モジュール;並びに
ビーム・ロケーション・モジュールであって、前記複数のビーム・ロケーションはそれぞれ前記画像フレームの前記境界内にあり、前記複数の境界ポジションと、並びにマッピング優先度、ビーム・プラットフォームの動く方向、及び前記ビーム・プラットフォームの動く速さのうちの少なくとも1つとに基づいて、前記複数のビーム・ロケーションを決定するために設計された該モジュール。
【発明の詳細な説明】
【背景技術】
【0001】
ビーム・レイアウト(beam layout)おける従来の試みとして、ストリップ・モード合成開口レーダー(SAR)やスキャン・モードSARが挙げられる。ストリップ・モードSARでは、レーダー装置は、該装置が向かっている方向に対して、固定された指向方向(pointing direction)を維持する。ストリップ・モードSARによりマッピングされたエリアは、レーダー・ビームのグランド・レンジ・スワスと、マッピング間隔にわたってビーム・プラットフォーム(例えば、航空機、宇宙機等)が移動した経路上の距離との産物である。一般的に、ストリップ・モードSARは、以下の事が原因となって、効率的ではない:航空機の速度の制約;各次元(レンジ/アジマス、又は経路方向/交差方向)に沿って等しい解像度を達成するための巨大なスクイント角において必要とされる拡張(extra)レーダー・レンジ又はドップラー帯域;、及びエリア優先度に従う柔軟性の欠如。スキャン・モードSARでは、レーダーの指向方向をコントロールして、地上の直線に沿って徐々にドリフトさせていく。しかし、こうしたドリフトの速度は、画像解像度と、アジマス・アンビギュイティの許容レベルとによる制約を受ける。一般的に、スキャン・モードSARは、以下の事が原因となって、効率的ではない:各次元(レンジ/アジマス、又は経路方向/交差方向)に沿って等しい解像度を達成するための巨大なスクイント角において必要とされる拡張レーダー・レンジ又はドップラー帯域;、及びエリア優先度に従う柔軟性の欠如。
【発明の概要】
【発明が解決しようとする課題】
【0002】
従って、当分野では、自動化されたビームのレイアウトを改良する必要性が存在する。
【課題を解決するための手段】
【0003】
1つのアプローチとしては、自動化されたビームのレイアウトのためのシステムを提供することがあげられる。
該システムは、以下を備える:
境界ポジション・モジュールであって、
画像(イメージ)フレームの境界に沿って複数の境界ポジションを生成するため、及び
複数のビーム・ロケーションに基づいて前記複数の境界ポジションを改変するため
に設計された該モジュール。
前記システムは、更に以下を備える:
ビーム・ロケーション・モジュールであって、前記複数のビーム・ロケーションはそれぞれ前記画像フレームの前記境界内にあり、前記複数の境界ポジションと、並びにマッピング優先度、ビーム・プラットフォームの動く方向、及び前記ビーム・プラットフォームの動く速さのうちの少なくとも1つとに基づいて、前記複数のビーム・ロケーションを決定するために設計された該モジュール。
【0004】
別のアプローチとしては、自動化されたビームのレイアウトのための方法を提供することが挙げられる。該方法は、以下のステップを含む:
(a)画像フレームの境界に沿って複数の境界ポジションを生成するステップ;
(b)マッピング優先度、ビーム・プラットフォームの動く方向、及び前記ビーム・プラットフォームの動く速さのうちの少なくとも1つに基づいて、前記複数の境界ポジション内に第一ビーム用の開始ロケーションを決定するステップ;
(c)前記開始ロケーションに基づいて、前記複数の境界ポジションを改変するステップ;
(d)マッピング優先度、ビーム・プラットフォームの動く方向、及び前記ビーム・プラットフォームの動く速さのうちの少なくとも1つに基づいて前記改変された複数の境界ポジション内に第二ビーム用の第二ロケーションを決定するステップ;並びに
(e)前記第二ロケーションに基づいて前記改変された複数の境界ポジションを改変するステップ。
【0005】
別のアプローチとしては、コンピュータ・プログラム製品を提供することが挙げられる。該コンピュータ・プログラム製品は、情報キャリア内で具体的に実行される。前記コンピュータ・プログラム製品は、データ処理装置に以下の動作を実行させるように機能する指示を含む:
画像フレームの境界に沿って複数の境界ポジションを生成すること;
マッピング優先度、ビーム・プラットフォームの動く方向、及び前記ビーム・プラットフォームの動く速さのうちの少なくとも1つに基づいて、前記複数の境界ポジション内に第一ビーム用の開始ロケーションを決定すること;
前記開始ロケーションに基づいて、前記複数の境界ポジションを改変すること;
マッピング優先度、ビーム・プラットフォームの動く方向、及び前記ビーム・プラットフォームの動く速さのうちの少なくとも1つに基づいて、前記改変された複数の境界ポジション内に第二ビーム用の第二ロケーションを決定すること;並びに
前記第二ロケーションに基づいて、前記改変された複数の境界ポジションを改変すること。
【0006】
別の例において、上記アプローチのいずれかは、1以上の下記の特徴を含むことができる。
【0007】
幾つかの例において、前記システムは更に以下を備える:
グランド座標転換モジュールであって、開始ポジションをグランド座標に転換するために設計されたモジュールであり、前記グランド座標が画像ビーム装置のロケーションに対するグランドを表すモジュール;並びに、
通信モジュールであって、前記画像ビーム装置へ前記グランド座標を送るため、及び前記画像ビーム装置から画像ビームを受け取るために設計された該モジュール。
【0008】
別の例において、前記システムは、マッピング優先度モジュールを更に備え、該モジュールは、ビーム・サイズ、ビーム解像度、前記画像フレームの前記境界と前記開始ロケーションとの間のグランド・オーバーラップ、スポイルされていないビーム・サイズ、及びスポイルされたビーム・サイズのうち少なくとも1つに基づいて、前記マッピング優先度を決定するために設計される。
【0009】
幾つかの例において、前記システムは、マッピング優先度モジュールを更に備え、該モジュールは、最小限のマッピング時間、最小限のビームレイアウト、最高度のビーム・ユーティリティ、及び検出の最高確率のうち少なくとも1つに基づいて、前記マッピング優先度を決定するために設計される
【0010】
別の例において、前記ビーム・プラットフォームは、航空機又は宇宙機である。幾つかの例において、前記複数の各ビーム・ロケーションは、スポットライト・モード合成開口レーダー・ビームである。
【0011】
別の例において、前記方法は更に以下のステップを含む:
(f)前記改変された複数の境界ポジションにより、前記画像フレームの境界が定義されるかどうかを決定するステップ;並びに
(g)ステップ(f)における決定に基づいて、ステップ(d)、(e)及び(f)を繰り返すステップ。
【0012】
幾つかの例において、前記方法は更に以下のステップを含む:
(f)前記開始ロケーション及び前記第二ロケーションの少なくとも1つ内でターゲットが検出されるかどうかを決定するステップ;並びに
(g)ステップ(f)における決定に基づいて、ステップ(d)、(e)及び(f)を繰り返すステップ。
【0013】
別の例において、前記方法は更に以下のステップを含む:
前記開始ポジションをグランド座標に転換するステップであり、前記グランド座標が画像ビーム装置のロケーションに対する地上を表すステップ;
前記グランド座標を前記画像ビーム装置に送るステップ;及び
前記画像ビーム装置から画像ビームを受け取るステップ。
【0014】
幾つかの例において、前記方法は更に以下のステップを含む:
ビーム・サイズ、ビーム解像度、前記画像フレームの前記境界と前記開始ロケーションとの間のグランド・オーバーラップ、スポイルされていないビーム・サイズ、及びスポイルされたビーム・サイズのうち少なくとも1つに基づいて、前記マッピング優先度を決定するステップ。
【0015】
別の例において、前記方法は、更に以下のステップを含む:
最小限のマッピング時間、最小限のビームレイアウト、最高度のビーム・ユーティリティ、及び検出の最高確率の少なくとも1つに基づいて、前記マッピング優先度を決定するステップ。
【発明の効果】
【0016】
本明細書に記載の自動化されたビームのレイアウト技術は、以下に述べる1以上の利点を提供することができる。前記技術の利点として、エリア(画像フレーム)の優先度は、(例えば、アンテナ・スキャン角度限界、ビーム・サイズ等によって)入力及び/又は自動決定することが可能であり、それによって、エリア内でより優先度が高い部分にリソースを優先化させることができ、そして、エリアを画像化するための全体コストを下げることができる。前記技術の別の利点として、エリアの優先度は、近距離でのエリアに関するビーム・スポイリング及び/又は他のパラメーターに基づくことができ、それによって、エリアの画像化に関連する効果的なリソースの制限をゆるめることができ、また、エリアを画像化するための全体コストを下げることができる。
【0017】
前記技術の別の利点として、前記技術は、ビーム・プラットフォーム(例えば、航空機、宇宙機、列車、自動車等)の飛行プロファイルに適応可能であり、それによって、前記技術の効果的な使用を増やし、前記技術を展開させるためのコストを減らすことができる。前記技術の別の利点として、前記技術は、コンピューター的に効率が良く、それによって、前記技術に関するコンピューター的な必要性を減らし、前記技術を使用するためのコストを減らすことができる。
【0018】
上述した及び他の目的、特性、及び利点については、添付した図面に表される、より具体的な後述の実施形態から明らかとなるだろう。該図面において、同一の参照文字は、複数の異なる図面にわたって同一の部品を意味している。実施形態の原理を表す際に、該図面は、描写する代わりに、拡大・縮小や強調が必ずしも行われているとは限らない。
【図面の簡単な説明】
【0019】
【図1】図1は、例示的なビーム・プラットフォーム環境の図である。
【図2A】図2Aは、例示的なグランド座標の図である。
【図2B】図2Bは、例示的なアンテナ座標の図である。
【図3】図3A及び図3Bは、例示的な画像フレームの図である。
【図4A】図4Aは、画像フレームに関する例示的なビーム・レイアウト図である。
【図4B】図4Bは、画像フレームに関する例示的なビーム・レイアウト図である。
【図5】図5は、例示的なビーム・レイアウト・システムに関するブロック図である。
【図6】図6は、例示的なビーム・レイアウト・プロセスに関するフローチャートである。
【図7】図7は、別の例示的なビーム・レイアウト・プロセスに関するフローチャートである。
【発明を実施するための形態】
【0020】
詳細な説明
自動化されたビームのレイアウト用の方法及び装置では、完全なエリア・カバー、完全な画質、及び/又は高効率を達成する画像ビーム装置(例えば、スポットライト・モード合成開口レーダー(SAR)、カメラ、画像センサー等)を用いて、グランド・エリア(画像フレーム)を包括的にスキャンする技術を含む。該技術では、ビーム・プラットフォーム(例えば、航空機、宇宙機、列車、自動車等)を利用し、ビーム装置を用いて、グランド・エリアを画像化する。エリアに関する完全な又は部分的な画像は、前記ビームのスポットライト画像のモザイクによって形成することができる。
【0021】
各ビームを配置するためのプロセスに関する一般的な記載として、前記技術は、以下のステップを実行することができる:
(1)フレーム境界ポイントをアンテナ座標に変換するステップ、
(2)ビーム中心座標及び楕円形輪郭モデルを決定するステップ、
(3)どのフレーム・ポイントがビーム内にあるか、そして、どのビーム・ポイントがフレーム内にあるかを決定するステップ、
(4)ステップ(3)での出力に基づいて、フレーム境界ポイントを更新するステップ、
(5)フレーム境界ポイントを、グランド座標に戻して変換するステップ、
(6)航空機のポジションとグランドからアンテナへの変換行列とを更新するステップ、
(7)次のビームに関して、(1)〜(6)のステップを繰り返すステップ。
【0022】
前記技術により、マッピング・エリアとビームの両方に関する境界ポイントを作成することができ、埋まっていないホールの数を最小限にしたマッピングのエリアを最大化することができ、それによって、前記技術の効率を上昇させている点で有利となる。例えば、前記エリアは、10.0km×10.0kmの正方形であり、境界ポイントは、前記正方形の外側上に100mごとに存在する(この例の場合、400個の境界ポイントが正方形の外側上に存在する)。前記技術では、より優先度の高いエリア及び/又は得られる最大エリア(ビーム間での最小限のオーバーラップ)に基づいて、ビームの指向方向を決定することができ、それによって、エリアを画像化するための時間を減らすことができる。前記技術では、分析的な輪郭モデルとともにアンテナ座標を用いて、ビーム・ロケーションを決定し、それによって、フレーム境界ポイントがビーム内にあるかどうかを前記技術によって迅速且つ効率的に決定することが可能となる。
【0023】
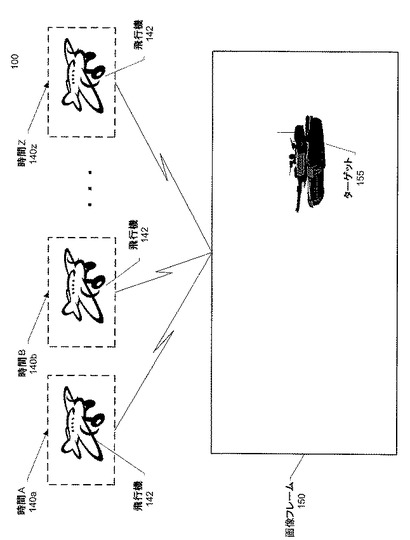
図1は、例示的なビーム・プラットフォーム環境(100)の図である。前記環境(100)は、飛行機(142)(ビーム・プラットフォーム)を含む。飛行機(142)は、ビーム装置(図示しない)を用いて、画像フレーム(150)内のターゲット(155)(当該例では、戦車)を画像化する。飛行機(142)は、複数の時間(A 140a、B 140b〜Z 140z)において、ターゲット(155)を監視及び/又は追跡する。飛行機(142)は、電磁波を送信し、及び/又は受信し、前記ターゲット及び/又は複数の他のターゲット(図示しない)を画像化する。例えば、前記飛行機(142)は、電磁波を一定期間送信し、そして、前記複数の時間(A 140a、B 140b〜Z 140z)にわたって前記ターゲット(155)からの反射してきた電磁波を受け取る。飛行機(142)内のビーム装置は、ビーム・レイアウト・システム(図示しない)とデータ通信を行う(例えば、ターゲット(155)のレーダー反射のデジタル表現、ターゲット(155)に関する処理されたデータ表現等)。
【0024】
図1では、前記複数の時間(A 140a、B 140b〜Z 140z)を例示しているが、飛行機(142)は、ターゲットを画像化するために、任意の数の時間からの受信データを利用することができる。図1では1台の飛行機(142)を例示しているが、前記環境(100)は任意の数のビーム・プラットフォーム(例えば、10台の飛行機、100台の宇宙機等)を利用することができる。例えば、飛行機(142)は、同一のターゲット又は異なる複数のターゲットに関するレーダー・データを任意の数の飛行機から受信することができる。別の例において、飛行機(142)は、複数のレーダー、カメラ、及び/又は他のタイプのセンサー装置(例えば、モーション・センサー、環境センサー、熱センサー等)を備えることができる。
【0025】
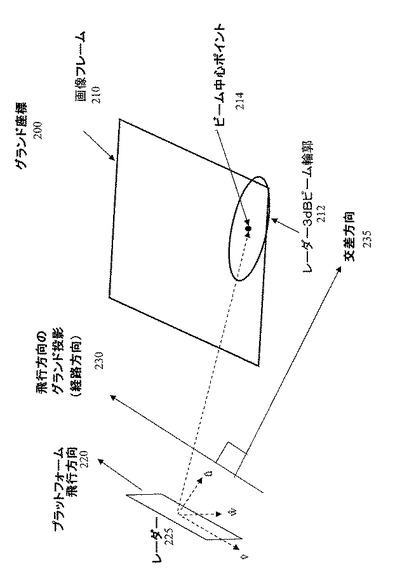
図2Aは、SARスポットライト・マッピングのジオメトリに関する例示的なグランド座標(200)の図である。前記図は、飛行方向(230)のグランド投影に対応するのビーム・プラットフォームの飛行方向(220)と、ビーム・プラットフォームに関する交差方向(235)とを例示している。ビーム・プラットフォーム上のレーダー(225)は、画像フレーム(210)(グランド・エリア)のマッピング用のビームを送信し、及び/又は受信する。ビーム・プラットフォームは、画像フレーム(210)内のビーム中心ポイント(214)を決定し、レーダーを3dBのビーム輪郭(212)(当該例では、楕円形)で投影する。レーダー(225)は、特定の画像解像度を達成するためのパルスを送信し、そして、一定の時間間隔(合成開口間隔と呼ぶ)にわたって前記パルスからのレーダー反射を受信する。前記時間間隔の間、レーダーは、地上の同一のロケーションにビームを向けた状態を継続する。
【0026】
図2Bは、例示的なアンテナ座標(250)の図である。該図では、アンテナ座標(250)内にレーダー・ビーム輪郭(260)を例示しており、該輪郭は、グランド座標(200)内の図2Aのレーダー・ビーム輪郭(212)から変換されたものである。
【0027】
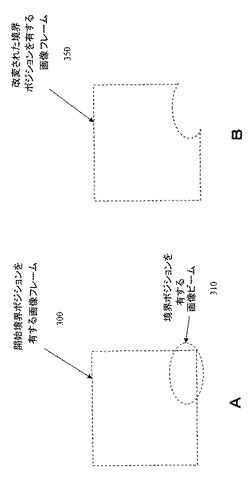
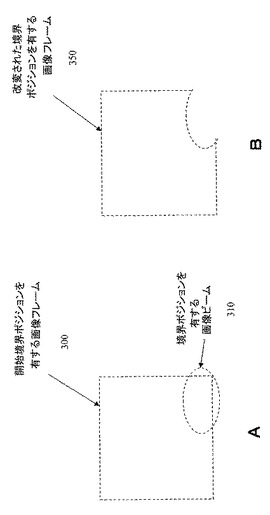
図3Aは、開始境界ポジションを有する例示的な画像フレーム(300)(当該例においては正方形)の図である。図3Aに表されているように、ビーム・レイアウト・システム (図示しない)は、境界ポジションを有する画像ビーム(310)のロケーションを決定する。図3Bは、例示的な改変された画像フレーム(350)の図である。ビーム・レイアウト・システムは、開始境界ポジションを有する画像フレーム(300)を改変し、改変された境界ポジションを有する画像フレーム(350)を形成する。ビーム・レイアウト・システムは、継続的に、画像ビームのロケーションを決定し、そして、画像ビームのロケーションに基づいて画像フレームを改変する。
【0028】
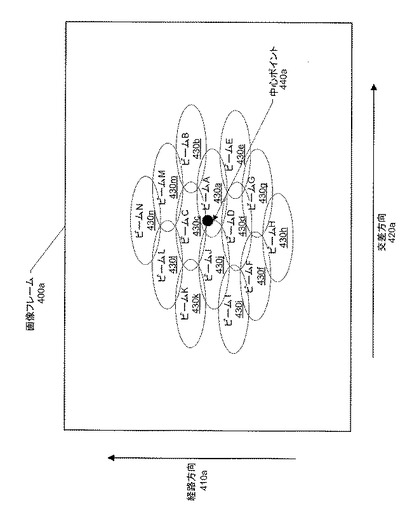
図4Aは、画像フレーム(400a)に関する例示的なビーム・レイアウトの図である。ビーム・レイアウトは、ビーム・プラットフォームの移動方向(410a)と、ビーム・プラットフォームの交差方向(420a)とに沿っている。ビーム・レイアウトは、複数のビームを含む(A 430a、B 430b、C 430c、D 430d、E 430e、F 430f、G 430g、H 430h、I 430i、J 430j、K 430k、L 430l、M 430m、及びN 430n)(包括的にビーム(430)と呼ぶ)。1以上のパラメーター(例えば、マッピング優先度、ビーム・プラットフォームの動く方向、前記ビーム・プラットフォームの動く速さ等)に基づいて、ビーム・レイアウト・システム (図示しない)は、画像フレーム(400a)内の中心ポイント(440a)を決定する。1以上のパラメーター(例えば、マッピング優先度、ビーム・プラットフォームの動く方向、前記ビーム・プラットフォームの動く速さ等)に基づいて、ビーム・レイアウト・システムは、ビーム(430)のレイアウトを決定する。表1では、ビーム・ロケーションに関連する例示的なパラメーターを例示する。
【0029】
【表1】

【0030】
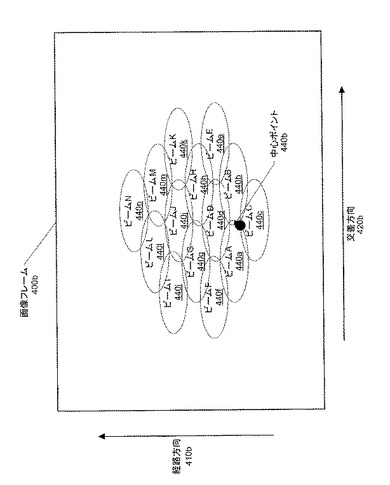
図4Bは、画像フレーム(400b)に関する例示的なビーム・レイアウトの図である。ビーム・レイアウトは、ビーム装置の移動方向(410b)と、ビーム装置の交差方向(420b)とに沿っている。ビーム・レイアウトは、複数のビームを含む(A 440a、B 440b、C 440c、D 440d、E 440e、F 440f、G 440g、H 440h、I 440i、J 440j、K 440k、L 440l、M 440m、and N 440n)(包括的にビーム(440)と呼ぶ)。1以上のパラメーターに基づいて、ビーム・レイアウト・システム (図示しない)は、画像フレーム(400b)内の中心ポイント(440b)を決定する。中心ポイント(440b)は、地理的エリア、停止したターゲットのロケーション、既知のターゲットのロケーション、及び/又は前記技術に関連した任意の他のロケーションの中心を表すことができる。有利な点として、中心ポイント(440b)を決定することにより、前記技術は、更なる画像フレームを画像化している間、リソースの割り当てを最大化することができる。1以上のパラメーターに基づいて、ビーム・レイアウト・システムは、ビーム(440)のレイアウトを決定する。有利な点として、1以上のパラメーターに基づくビーム(440)のレイアウトにより、リソース割り当てを最大化している間、現実世界での限界に基づいて、前記技術がビーム・レイアウトをカスタマイズすることが可能になる。
【0031】
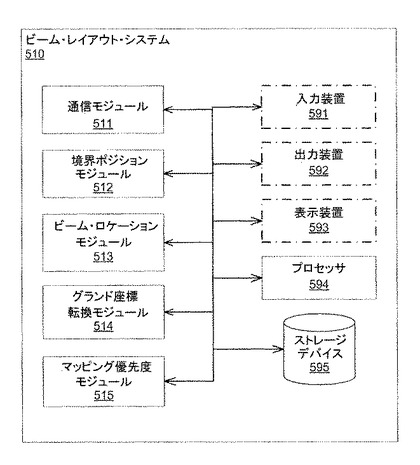
図5は、例示的なビーム・レイアウト・システム(510)のブロック図である。前記ビーム・レイアウト・システム(510)は、以下を備える:通信モジュール(511)、境界ポジション・モジュール(512)、ビーム・ロケーション・モジュール(513)、グランド座標転換モジュール(514)、マッピング優先度モジュール(515)、入力装置(591)、出力装置(592)、表示装置(593)、プロセッサ(594)、及びストレージ・デバイス(595)。本明細書に記載の前記モジュール及び装置は、例えば、コンピュータ実行可能指示を実行するためのプロセッサ(594)を利用することができ、及び/又はコンピュータ実行可能指示を実行するためのプロセッサを備えることができる(例えば、暗号化処理ユニット、現場でプログラム可能なゲートアレイ(FPGA)処理ユニット等)。ビーム・レイアウト・システム(510)は、例えば、他のモジュール、装置、及び/若しくは公知のプロセッサ、並びに/又は様々な種類の前記例示したモジュール、装置、及び/若しくはプロセッサを備えることが出来る点を理解されたい。
【0032】
通信モジュール(511)は、画像ビーム装置にグランド座標を送信し、そして、画像ビーム装置から画像ビームを受信する。通信モジュール(511)は、レーダー・データを受信する(例えば、レーダー・シグナル・データを、レーダー・プラットフォームから、仲介レーダー処理装置から、ストレージ・デバイスから等)。通信モジュール(511)は、ビーム・レイアウト・システム(510)へ/から情報を伝達する。通信モジュール(511)は、例えば、レーダー・プラットフォームに関連する情報を受け取ることができる。レーダー・プラットフォームに関連する情報は、データ・シグナルに関連づけることができる(例えば、レーダー・プラットフォームからデータ・シグナル、レーダー・プラットフォームからの処理されたデータ・シグナル、モーション・センサーからのデータ・シグナル、全地球測位システムからのデータ・シグナル、ロケーション・システムからのデータ・シグナル等)。
【0033】
境界ポジション・モジュール(512)は、複数の境界ポジションを画像フレームの境界に沿って生成し、前記複数の境界ポジションを、複数のビーム・ロケーションに基づいて改変する。有利な点として、複数の境界ポジションを生成すると、画像化する必要がある画像エリアに関するロケーション座標を用いて画像フレームを追跡することにより、前記技術に係るリソース要求が減少することになる。複数の境界ポジションと、マッピング優先度、ビーム・プラットフォームの動く方向、及び前記ビーム・プラットフォームの動く速さのうち少なくとも1つとに基づいて、ビーム・ロケーション・モジュール(513)は、複数のビーム・ロケーションを決定し、ここで、各複数のビーム・ロケーションは、画像フレームの境界内にある。有利な点として、複数のビーム・ロケーションが決定されると、1以上のパラメーターを利用することにより画像化した画像フレームが最大化される。グランド座標転換モジュール(514)は、開始ポジションをグランド座標に変換し、前記グランド座標は、画像ビーム装置のロケーションに対するグランドを表す。
【0034】
マッピング優先度モジュール(515)は、マッピング優先度を、以下の少なくとも1つに基づいて決定する:ビーム・サイズ、ビーム解像度、画像フレームの境界と開始ロケーションとのグランド・オーバーラップ、スポイルされていないビーム・サイズ、及びスポイルされたビーム・サイズ。別の例において、マッピング優先度モジュール(515)は、マッピング優先度を、以下の少なくとも1つに基づいて決定する:最小限のマッピング時間、最小限のビームレイアウト、最高度のビーム・ユーティリティ、及び検出の最高確率。有利な点として、マッピング優先度を決定すると、画像フレームの優先エリアにリソースを集中させることにより、画像化されるエリアの量及び/又は質を前記技術が向上させることができる。
【0035】
入力装置(591)は、ビーム・レイアウト・システム(510)に関連した情報(例えば、ユーザーからの指示、別のコンピューティングデバイスからの指示等)をユーザー(図示しない)から、及び/又は別のコンピューティングシステム(図示しない)から受け取る。入力装置(591)には、例えば、キーボード、スキャナー等を含めることができる。出力装置(592)は、ビーム・レイアウト・システム(510)に関連した情報を出力する(例えば、プリンタ(図示しない)に情報を出力する、スピーカーに情報を出力する等)。
【0036】
表示装置(593)は、ビーム・レイアウト・システム(510)に関連する情報(例えば、ステータス情報、設計情報等)を表示する。幾つかの例において、表示装置(593)は、対象物の分類を特定する可能性、及び/又はビーム・レイアウト・システム(510)に関連する他の任意の情報をオペレータに表示する。プロセッサ(594)は、オペレーティングシステムと、及び/又はビーム・レイアウト・システム(510)に関する他の任意のコンピュータ実行可能指示とを実行する(例えば、アプリケーションを実行する等)。
【0037】
ストレージ・デバイス(595)は、受信したデータ(例えば、実際のレーダー・データ、処理されたレーダー・データ等)、ビーム・レイアウト、及び/又はビーム・レイアウト・システム(510)に関連する任意の他のデータを記憶する。ストレージ・デバイス(595)は、画像情報、及び/又はビーム・レイアウト・システム(510)に関連する任意の他のデータを記憶することができる。ストレージ・デバイス(595)は、複数のストレージ・デバイスを含むことができ、及び/又はビーム・レイアウト・システム(510)は、複数のストレージ・デバイス(例えば、レーダー・ストレージ・デバイス、識別(identification)ストレージ・デバイス, 等)を含むことができる。ストレージ・デバイス(595)は、例えば、長期ストレージ(例えば、ハード・ドライブ、テープ・ストレージ・デバイス、フラッシュ・メモリ等)、短期ストレージ(例えば、ランダム・アクセス・メモリ、グラフィック・メモリ等)、及び/又は任意の他のコンピュータ読取可能ストレージを含むことができる。
【0038】
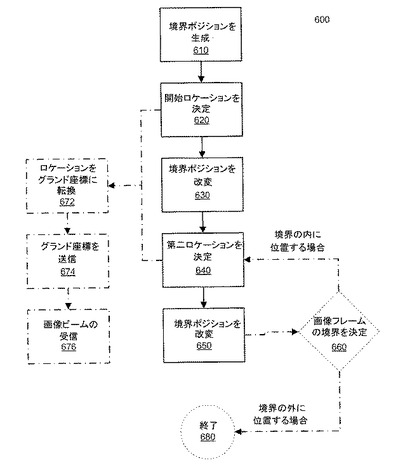
図6は、例えば、 図5のビーム・レイアウト・システム(510)を利用した例示的なビーム・レイアウト・プロセス(600)のフローチャートである。境界ポジション・モジュール(512)は、画像フレームの境界に沿って、複数の境界ポジションを生成し(610)、有利な点として、該生成により、画像化のための残りの画像フレーム内のエリアに関する境界を計算するのが容易になる。ビーム・ロケーション・モジュール(513)は、マッピング優先度、ビーム・プラットフォームの動く方向、及び前記ビーム・プラットフォームの動く速さのうちの少なくとも1つに基づいて、複数の境界ポジション内の第一ビーム用の開始ロケーションを決定(620)し、有利な点として、該決定により、画像化の優先順位をつけ、リソースの割り当てを最大化する。境界ポジション・モジュール(512)は、開始ロケーションに基づいて、複数の境界ポジションを改変する(630)。ビーム・ロケーション・モジュール(513)は、マッピング優先度、ビーム・プラットフォームの動く方向、及び前記ビーム・プラットフォームの動く速さのうち少なくとも1つに基づいて、改変された複数の境界ポジション内で第二ビーム用の第二ロケーションを決定する(640)。パラメーターに基づいてロケーションを決定することにより、前記技術は、ビーム装置及びビーム・プラットフォームの実際の制約に基づいて、ビーム・レイアウトをカスタマイズすることが可能になる。境界ポジション・モジュール(512)は、第二ロケーションに基づいて、改変された複数の境界ポジションを改変する(650)。境界ポジションを改変することにより、前記技術は、コンピュータ的に効率的な境界ポジションのインジケータを使用することを通して、別のビーム・ロケーションを効率的に決定することが可能となる。
【0039】
幾つかの例において、改変された複数の境界ポジションが画像フレームの境界を定義するかどうか(換言すれば、画像ビームによってカバーされない画像フレームの部分があるかどうか)を境界ポジション・モジュール(512)が決定する(660)。改変された複数の境界ポジションが画像フレームの境界内にある場合には、ビーム・ロケーション・モジュール(513)が処理を継続することによって、マッピング優先度、ビーム・プラットフォームの動く方向、及び前記ビーム・プラットフォームの動く速さのうち少なくとも1つに基づいて、改変された複数の境界ポジション内に別のビーム用の別のロケーションを決定する(640)。改変された複数の境界ポジションが画像フレームの境界の外にある場合には、処理は終了する(680)。有利な点として、ビーム・ロケーション・モジュール(513)による決定(640)は、効率的なコンピューテーションとなり、その原因としては、前記画像エリアの境界ポジション管理がシンプルとなるからであり、シンプルになることにより、前記決定(640)の為に必要となるリソースを減らし、画像レイアウト処理の速度を増加させるからである。
【0040】
別の例において、グランド座標転換モジュール(514)は、開始ポジションをグランド座標に転換する(672)。グランド座標は、画像ビーム装置のロケーションに対するグランドを表す。グランド座標転換モジュール(514)は、グランド座標を画像ビーム装置に送る(674)。グランド座標転換モジュール(514)は、画像ビーム装置から画像ビームを受け取る(676)。
【0041】
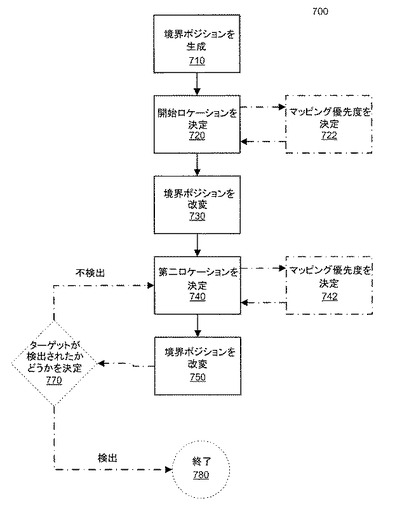
図7は、別の例示的なビーム・レイアウト プロセス(700)のフローチャートであり、例えば、図5のビーム・レイアウト・システム(510)を用いている。境界ポジション・モジュール(512)は、画像フレームの境界に沿って、複数の境界ポジション(710)を生成する。ビーム・ロケーション・モジュール(513)は、マッピング優先度、ビーム・プラットフォームの動く方向、及び前記ビーム・プラットフォームの動く速さのうち少なくとも1つに基づいて、複数の境界ポジション内の第一ビーム用の開始ロケーションを決定する(720)。境界ポジション・モジュール(512)は、開始ロケーションに基づいて、複数の境界ポジションを改変する(730)。ビーム・ロケーション・モジュール(513)は、マッピング優先度、ビーム・プラットフォームの動く方向、及び前記ビーム・プラットフォームの動く速さのうち少なくとも1つに基づいて、改変された複数の境界ポジション内の第二ビーム用の第二ロケーションを決定する(740)。境界ポジション・モジュール(512)は、第二ロケーションに基づいて、改変された複数の境界ポジションを改変する(750)。
【0042】
幾つかの例において、開始ロケーション、第二ロケーション、及び/又は任意の追加的ロケーションのうち少なくとも1つの中でターゲットが検出されるかどうかについて、境界ポジション・モジュール(512)が決定する(770)。ビーム・ロケーションについて優先順位をつけることによって、画像フレーム内のターゲットの位置を前記技術が効率的に特定することが可能となり、有利な点として、該効率的な特定により、ターゲットを検出するための時間を減らし、そして、ターゲットを検出するためのコストを減らることができる。もし、ターゲットが検出されない場合には、ビーム・ロケーション・モジュール(513)が処理を継続することによって、マッピング優先度、ビーム・プラットフォームの動く方向、及び前記ビーム・プラットフォームの動く速さのうち少なくとも1つに基づいて、改変された複数の境界ポジション内に別のビーム用の別のロケーションを決定する(740)。もし、ターゲットが検出された場合には、処理は終了する(780)。
【0043】
別の例において、マッピング優先度モジュール(515)は、ビーム・サイズ、ビーム解像度、前記画像フレームの前記境界と前記開始ロケーションとの間のグランド・オーバーラップ、スポイルされていないビーム・サイズ、及びスポイルされたビーム・サイズのうち少なくとも1つに基づいて、マッピング優先度を決定する(722及び/又は742)。幾つかの例において、マッピング優先度モジュール(515)は、最小限のマッピング時間、最小限のビームレイアウト、最高度のビーム・ユーティリティ、及び検出の最高確率のうち少なくとも1つに基づいて、マッピング優先度を決定する(722及び/又は742)。別の例において、マッピング優先度モジュール(515)は、任意の種類のパラメーター及び/又は複数のパラメーター組合せ(例えば、最小限のマッピング時間及びスポイルされていないビーム・サイズ、ビーム解像度及び検出の最高確率等)に基づいて、マッピング優先度を決定する(722及び/又は742)。幾つかの例において、マッピング優先度モジュール(515)は、画像エリアの予備知識、外部の手がかり、確率分布関数、地理的な特徴(例えば、道路、建物等)に基づいて、マッピング優先度を決定する(722及び/又は742)。有利な点として、前記技術は、マッピング優先度を利用して、リソース(例えば、航空機、プロセッサ、メモリ等)及び/又は時間(例えば、航空機の飛行時間、画像エリア上での時間等)の使用を最大限にし、それによって、画像フレームを画像化するためのコスト全体を減らす。表2は、例示的なマッピング優先度を表す。例えば、表2に表すように、ビームA(430a)は、最も高い優先順位となっており、理由としては、マッピングの時間が低いこと、及び中心ポイントへの距離が短いことが挙げられる。
【0044】
【表2】
【0045】
幾つかの例において、ビーム・プラットフォームは、航空機、宇宙機、及び/又は、任意の他の種類の移動プラットフォーム(例えば、列車、自動車等)である。別の例において、複数の各ビーム・ロケーションは、スポットライト・モード合成開口レーダー・ビームである。幾つかの例において、複数の各ビーム・ロケーションは、任意の種類のビーム(例えば、カメラビーム、赤外線ビーム等)及び/又は複数の種類のビームの任意の組合せである。
【0046】
別の例において、ビーム・レイアウト・システムは、画像エリアのサイズ、ビーム・サイズ、アンテナのデザイン、境界ポイントの必要な密度、並びに/又はビーム装置及び/若しくは画像エリアに関連する任意の他の情報に基づいて、画像エリア用の複数の境界ポイントを決定する。有利な点として、こうした複数の境界ポイントにおけるバリエーションにより、様々な状況や物理的な制約に前記技術が適応することができ、前記技術の効率を向上させる。幾つかの例において、最適の境界ポイントの数を決定するために、ビーム・レイアウト・システムは、ビーム・レイアウト・プロセスについてシミュレーションを行い、理由としては、境界ポイントが多すぎるとビーム・レイアウト・プロセスが遅くなる可能性があり、また、境界ポイントが少なすぎると、画像エリアの一部が失われることになる可能性があるからである。
【0047】
例示的な四角形のマッピング・エリアに関して、フレーム境界ポイントは、フレームに係る4本の境界線の集合である。ビーム・レイアウト・システムは、座標を以下の要素で決定する:フレーム中心座標
及び
;経路方向のフレーム・サイズ
;交差方向のフレーム・サイズ
;フレーム配向角
;経路方向の境界におけるフレーム・ポイントの数
;交差方向の境界におけるフレーム・ポイントの数
。フレーム・ポイントのトータル数は、
として、表され、ここで、
【数1】
である。
【0048】
更なる例として、フレーム境界ポイントは、経路方向座標である
と、交差方向座標である
とのポイントの組である。該組は、
として表され、ここで
【数2】
である。
【0049】
別の例において、最初の航空機のポジションを、第一ビームの計画されたマッピング時間に基づいて、航空機の情報から抽出する。ACD(経路方向、交差方向、及び下方向)におけるグランド座標と、UVWアンテナ座標(アンテナ・ノーマル(antenna normal)、長軸、及び短軸)との間の座標転換は、アンテナ・マウント角(antenna mounting angles)に基づいて決定される。もしも、
が、ACD座標からUVW座標への変換を表す場合には、該変換
は、
の逆座標変換となる。グランド座標におけるアンテナ・ボアサイト・ベクトルは
で表される。各フレーム・ポイントのアンテナ座標
は、座標転換を介して、前記フレーム・ポイントの指向ベクトルに基づいて得られ、以下に従って計算される:
【数3】
ここで、
【数4】
であり、
は、航空機の高度であり、
及び
は、航空機の経路方向座標及び交差方向座標をそれぞれ表す。
【0050】
別の例において、ビーム・レイアウト・システムは、各フレーム・ポイントに関するマッピングの優先度を定義し、有利な点として、該定義によって、画像フレームの実際の物理的制約に基づいてビーム・レイアウトをカスタマイズする。高優先度のポイントは、最も長いスラント・レンジ、最も短いスラント・レンジ、最大アジマス角、最小アジマス角、及び/又は他の測定値を有するフレームであってもよい。該例において、マッピング優先度については、アンテナ座標中の最大v値をフレーム・ポイント上に置くことができる。該優先順位化により、もうすぐスキャン限界になりそうなフレームの一部をマッピングが終了させることが可能になり、それによって、飛行経路下で画像フレーム全体が完全にマッピングされる確率を高め、エリアを再度画像化するための潜在的なコストを減らすことができる。最も高いマッピング優先度を持つフレーム・ポイントを得るためのプロセスは、全てのフレーム・ポイントから最大のv座標を見つけることであり、即ち、以下の式に従う。
【数5】
ここで、
【数6】
である。
【0051】
別の例において、ビーム・レイアウト・システムは、中心ポイントを決定し、有利な点として、該決定により、画像フレームのうち優先度がより高い部分に、ビーム・レイアウトを集中させる。ビーム・レイアウト・システムは、中心ポイントを決定するために以下のステップを進める/利用することができる。
【0052】
(1)
と
との間にあるv座標を有するフェーム・ポイント(fame points)を探すステップ。該ステップは、w座標においてサーチ・ウィンドウを決定するために使用することができる。下記の式
【数7】
を満たすフレーム・ポイントのセットは、
として表される。ここで、
は、v方向に沿ったビーム幅である。
【0053】
(2)w座標においてサーチ・ウィンドウ、すなわち、前記ステップからの全てのフレーム・ポイントの
を決定するステップ。ここで
は、
【数8】
であらわされ、
【数9】
である。
【0054】
(3)中心ポイントに関する全ての候補となるw値、すなわち
【数10】
(ここで、
【数11】
であり、
【数12】
である)を決定するステップ。
【0055】
(4)各候補の
に関して、ビーム中心の対応するv座標、すなわち
を決定するステップ。前述した、
は、ビームとフレームとの間の最大オーバーラップに基づいて計算される。フレーム・ポイントのサブセットは、
として表され、前記フレーム・ポイント
【数13】
は、
【数14】
と
【数15】
に従って、計算される。ビーム中心が以下の条件に従うのであれば、ビーム輪郭はフレーム・ポイントを含むことができる:
【数16】
(ここで、
【数17】
であり、
は、w方向に沿ったビーム幅である。そして、k番目のビームの中心のv座標は、
中の全てのフレームポイント
内での
の最大値、すなわち、
【数18】
によって表される。
【0056】
(5)
及び
で中心に位置するビームによって、フレームから集められたエリアを決定し、集められた最大値のエリアを有するビームを選択するステップ。最初のステップは、各ビーム内の全てのフレーム・ポイントを探すためのものである。
は、ビーム
内にあるフレーム・ポイントの集合である。
中のフレーム・ポイントは以下に従って計算される:
【数19】
(ここで、
【数20】
であり、
【数21】
であり、
【数22】
である)。そして、同一のフレーム・ポイントwを有する3dBのビーム輪郭の左側(更に低いv値を有するところ)のポイントのv座標を探す。
【数23】
また、k番目のビームとフレームとのオーバーラップしたエリアは、
内のフレーム・ポイントと、3dBのビーム輪郭の左側(更に低いv値を有するところ)の対応するビーム・ポイントとによって定義されるが、以下の式によって近似することができる:
【数24】
(ここで、
と、
は、アンテナ座標中のポイントである
のグランド座標であり、
と、
は、アンテナ座標中のポイントである
のグランド座標である)。
【0057】
(6)ビーム中心ポジションは、以前のステップで見出された最大エリアを有するものであり、以下の式にしたがって計算される:
【数25】
【数26】
(ここで、
【数27】
であり、
【数28】
である)。
【0058】
別の例において、ビーム・レイアウト・システムは、ビーム境界内にあるフレーム・ポイント (境界ポイント)を検出する。前記ポイントは、フレーム・ポイントの既存のセットから削除される。フレーム・ポイントを検出するために、ビーム・レイアウト・システムは、以下のステップを進める/利用することができる。
【0059】
(1)v座標が
を超えるフレーム・ポイントに関して、相対的なv及びwが最初に計算され、即ち、
【数29】
【数30】
である。
の方位角については、
【数31】
で表される。
【0060】
(2)前記方位角から、同方位角に関連したビーム・ポイントのラジアル距離を以下の式に従って生成する。
【数32】
【0061】
(3)フレーム・ポイントのラジアル距離が、対応するビーム・ポイントのラジアル距離よりも小さい場合には、フレーム・ポイントはビーム内にあることになり、従って、フレーム・ポイントのセットから除去される。
もしも、
【数33】
である場合には、
【数34】
となる。
従って、
【数35】
となる。
【0062】
別の例において、ビーム・レイアウト・システムは、経路方向での航空機のポジションと高度と、即ち
と
に基づいて、アンテナ指向ベクトルを、経路方向及び交差方向におけるグランド座標に転換する。こうしたプロセスは以下の通り表される。
【数36】
を更新されたフレーム境界ポイントのアンテナ座標とすると、ACD座標中の指向ベクトルに対応するものは、
【数37】
となり、ここで、
【数38】
である。更新されたフレーム・ポイントのグランド座標は、以下の式に従い計算される:
【数39】
及び
【数40】
。
【0063】
上記システム及び方法は、デジタル電子回路内、コンピュータのハードウェア、ファームウェア、及び/又はソフトウェア内で実行することができる。前記実行は、コンピュータ・プログラム製品として実行されてもよい。例えば、前記実行は、データ処理装置によって実行されるための、又は該処理装置の動作をコントロールするための機械読取可能ストレージ・デバイスで実行されてもよい。例えば、前記実行は、プログラム制御可能なプロセッサ、1台のコンピュータ、及び/又は複数のコンピュータで実行されてもよい。
【0064】
コンピュータ・プログラムは、任意の形態のプログラム言語で記述することができ、コンパイラ言語及び/又はインタプリタ言語が含まれ、また、コンピュータ・プログラムは、任意の形態で配置することができ、該形態として、スタンド・アロンなプログラムと、又はサブルーチンと、エレメントと、及び/又はコンピューティング環境での使用に適した他のユニットとが含まれる。コンピュータ・プログラムは、1台のコンピュータ上、又は1つのサイト上にある複数のコンピュータ上に配置して実行することができる。
【0065】
方法のステップについては、コンピュータ・プログラムを実行する1以上のプログラム制御可能なプロセッサによって実行することができ、入力データについて操作し、出力を生成することによって本発明の機能を実行することができる。また、方法のステップは、特定目的の論理回路によって実行することができ、そして、装置は、該回路として実装することができる。例えば、前記回路は、FPGA(現場でプログラム可能なゲートアレイ)及び/又はASIC (特定用途向けIC)であってもよい。サブルーチン及びソフトウェア・エージェントは、前記機能を実行するコンピュータ・プログラム、プロセッサ、特定回路、ソフトウェア、及び/又はハードウェアの一部を参照することができる。
【0066】
コンピュータ・プログラムの実行に適したプロセッサは、例示的な意味で、汎用目的及び特定目的の両方のマイクロプロセッサ、並びに任意の種類のデジタル・コンピュータの任意の1以上のプロセッサを含む。 一般的に、プロセッサは、リード・オンリ・メモリ、若しくはランダム・アクセス・メモリ、又はその両方からの指示及びデータを受け取る。コンピュータにおける不可欠な要素として、指示を実行するためのプロセッサと、指示及びデータを記憶するための1以上のメモリ装置がある。一般的に、データを記録するための1以上のマス・ストレージ・デバイス(例えば、磁気ディスク、光磁気ディスク、又は光学ディスク)からデータを受け取るために、及び/又はデータを該デバイスに送るためにコンピュータは機能的に連結してもよい。
【0067】
また、データ転送及び指示は通信ネットワークを介して行うこともできる。コンピュータ・プログラムの指示及びデータを実行するのに適したコンピュータ・プログラム製品は、あらゆる形態の不揮発性の メモリを含み、例示的な意味では、半導体メモリ装置が含まれる。コンピュータ・プログラム製品は、例えば、EPROM、EEPROM、フラッシュ・メモリ装置、磁気ディスク、内蔵型ハードディスク、リムーバブル・ディスク、光磁気ディスク、CD−ROM、及び/又はDVD−ROMディスクであってもよい。プロセッサ及びメモリは、特定目的の論理回路によって提供されてもよく、及び/又は該回路中に組み込まれても良い。
【0068】
ユーザーとの相互作用を提供するために、上記技術は、表示装置を有するコンピュータ上で実行することができる。前記表示装置は、例えば、CRT及び/又は液晶ディスプレイ(LCD)モニタであってもよい。ユーザーとの相互作用は、例えば、ユーザー対する情報に関する表示装置と、並びにキーボード及びポインティング・デバイス(例えば、マウス又はトラックボール)であってもよく、これらによって、ユーザーは、コンピュータに入力を提供することができる(例えば、ユーザー・インターフェース・エレメントとの相互作用)。ユーザーとの相互作用を提供するために他の種類の装置を使用することができる。他の装置として、例えば、任意の形態の感覚的フィードバック(例えば、視覚的フィードバック、聴覚的フィードバック、又は触覚的フィードバック)形態でユーザーに提供するフィードバックであってもよい。ユーザーからの入力は、例えば、任意の形態で受け取ることができ、音、音声、及び/又は触覚的入力が含まれる。
【0069】
上記技術は、バック・エンド・コンポーネントを含む分散されたコンピューティング・システム中で実施することができる。バック・エンド・コンポーネントは、例えば、データ・サーバー、ミドルウェア・コンポーネント、及び/又はアプリケーション・サーバーであってもよい。上記技術は、フロント・エンド・コンポーネントを含む分散させるコンピューティングシステム中で実施することができる。フロント・エンド・コンポーネントは、例えば、クライアント・コンピュータであってもよく、該コンピュータは、ユーザーが例示的な実施形態と相互作用可能にするグラフィカル・ユーザー・インターフェース、ウェブ・ブラウザ、及び/又は伝送装置に関連する他のグラフィカル・ユーザー・インターフェースを有することができる。システムの構成要素は、任意の形態、又はデジタル・データ通信の媒体(例えば、通信ネットワーク)によって相互に接続することができる。通信ネットワークの例として、LAN、ワイド・エリア・ネットワーク(WAN)、インターネット、有線ネットワーク、及び/又は無線ネットワークが挙げられる。
【0070】
システムは、クライアント及びサーバーを含むことができる。クライアント及びサーバーは、一般的に、互いに離れており、典型的には通信ネットワークを介して相互作用する。それぞれのコンピュータ上で実行され、及びクライアント−サーバーの関係を相互に有するコンピュータ・プログラムの手段により、クライアント及びサーバーの関係が生じる。
【0071】
パケットベースのネットワークとしては、例えば、以下のものが含まれる:インターネット、キャリア・インターネット プロトコル(IP)ネットワーク(例えば、ローカル・エリア・ネットワーク(LAN)、ワイド・エリア・ネットワーク(WAN)、キャンパス・エリア・ネットワーク(CAN)、メトロポリタン・エリア・ネットワーク(MAN)、ホーム・エリア・ネットワーク(HAN))、プライベートIPネットワーク、IP構内交換機(IPBX)、無線ネットワーク(例えば、無線アクセス・ネットワーク(RAN)、802.11ネットワーク、802.16ネットワーク、汎用パケット無線サービス(GPRS)ネットワーク、HiperLAN)、及び/又は他のパケットベースのネットワーク。回路ベースのネットワークとしては、例えば、以下のものが含まれる:公衆電話交換回線網(PSTN)、構内交換機(PBX)、無線ネットワーク(例えば、RAN、bluetooth(登録商標)、符号分割多元接続(CDMA)ネットワーク、時分割多元接続(TDMA)ネットワーク、モバイル通信用グローバル・システム(GSM)ネットワーク)、及び/又は他の回路ベースのネットワーク。
【0072】
伝送装置としては、例えば、以下の物が含まれる:コンピュータ、閲覧装置を備えるコンピュータ、電話、IP電話、携帯端末(例えば、携帯電話、個人情報端末(PDA)装置、ラップトップ・コンピュータ、電子メール装置)、及び/又は他の通信装置。前記閲覧装置は、例えば、WWWブラウザ (例えば、Microsoft Corporationから入手できるMicrosoft(登録商標)インターネット・エクスプローラ(登録商標)、Mozilla Corporationから入手できるMozilla(登録商標)Firefox)を備えるコンピュータ (例えば、 デスクトップ・コンピュータ, ラップトップ・コンピュータ)が含まれる。モバイル・コンピューティング・デバイスは、例えば、Blackberry(登録商標)が含まれる。
【0073】
「含む」「備える」(Comprise、include)、及び/又は各要素の複数形態は、オープンエンドであり、列挙された部分を含み、そして、列挙されていない追加部分を含むことができる。「及び/又は」(並びに/又は、及び/若しくは等についても同様)は、オープンエンドであり、1以上の列挙された部分を含み、列挙された部分の組合せも含む。
【0074】
本発明の思想及び本質的特徴から離れることなく、他の特定の形態で本発明を実施することができることを当業者は理解するであろう。従って、上記実施形態は、あらゆる意味において、本明細書に記載した本発明を限定するものではなく、例示的なものとして考慮すべきものである。よって、本発明の範囲については、上述した内容によってではなく、添付した特許請求の範囲によって表される。ゆえに、特許請求の範囲の意味するところ、及び該範囲の均等物の範囲に属する全ての改変についても、本発明の範囲内に含まれることを企図する。
【背景技術】
【0001】
ビーム・レイアウト(beam layout)おける従来の試みとして、ストリップ・モード合成開口レーダー(SAR)やスキャン・モードSARが挙げられる。ストリップ・モードSARでは、レーダー装置は、該装置が向かっている方向に対して、固定された指向方向(pointing direction)を維持する。ストリップ・モードSARによりマッピングされたエリアは、レーダー・ビームのグランド・レンジ・スワスと、マッピング間隔にわたってビーム・プラットフォーム(例えば、航空機、宇宙機等)が移動した経路上の距離との産物である。一般的に、ストリップ・モードSARは、以下の事が原因となって、効率的ではない:航空機の速度の制約;各次元(レンジ/アジマス、又は経路方向/交差方向)に沿って等しい解像度を達成するための巨大なスクイント角において必要とされる拡張(extra)レーダー・レンジ又はドップラー帯域;、及びエリア優先度に従う柔軟性の欠如。スキャン・モードSARでは、レーダーの指向方向をコントロールして、地上の直線に沿って徐々にドリフトさせていく。しかし、こうしたドリフトの速度は、画像解像度と、アジマス・アンビギュイティの許容レベルとによる制約を受ける。一般的に、スキャン・モードSARは、以下の事が原因となって、効率的ではない:各次元(レンジ/アジマス、又は経路方向/交差方向)に沿って等しい解像度を達成するための巨大なスクイント角において必要とされる拡張レーダー・レンジ又はドップラー帯域;、及びエリア優先度に従う柔軟性の欠如。
【発明の概要】
【発明が解決しようとする課題】
【0002】
従って、当分野では、自動化されたビームのレイアウトを改良する必要性が存在する。
【課題を解決するための手段】
【0003】
1つのアプローチとしては、自動化されたビームのレイアウトのためのシステムを提供することがあげられる。
該システムは、以下を備える:
境界ポジション・モジュールであって、
画像(イメージ)フレームの境界に沿って複数の境界ポジションを生成するため、及び
複数のビーム・ロケーションに基づいて前記複数の境界ポジションを改変するため
に設計された該モジュール。
前記システムは、更に以下を備える:
ビーム・ロケーション・モジュールであって、前記複数のビーム・ロケーションはそれぞれ前記画像フレームの前記境界内にあり、前記複数の境界ポジションと、並びにマッピング優先度、ビーム・プラットフォームの動く方向、及び前記ビーム・プラットフォームの動く速さのうちの少なくとも1つとに基づいて、前記複数のビーム・ロケーションを決定するために設計された該モジュール。
【0004】
別のアプローチとしては、自動化されたビームのレイアウトのための方法を提供することが挙げられる。該方法は、以下のステップを含む:
(a)画像フレームの境界に沿って複数の境界ポジションを生成するステップ;
(b)マッピング優先度、ビーム・プラットフォームの動く方向、及び前記ビーム・プラットフォームの動く速さのうちの少なくとも1つに基づいて、前記複数の境界ポジション内に第一ビーム用の開始ロケーションを決定するステップ;
(c)前記開始ロケーションに基づいて、前記複数の境界ポジションを改変するステップ;
(d)マッピング優先度、ビーム・プラットフォームの動く方向、及び前記ビーム・プラットフォームの動く速さのうちの少なくとも1つに基づいて前記改変された複数の境界ポジション内に第二ビーム用の第二ロケーションを決定するステップ;並びに
(e)前記第二ロケーションに基づいて前記改変された複数の境界ポジションを改変するステップ。
【0005】
別のアプローチとしては、コンピュータ・プログラム製品を提供することが挙げられる。該コンピュータ・プログラム製品は、情報キャリア内で具体的に実行される。前記コンピュータ・プログラム製品は、データ処理装置に以下の動作を実行させるように機能する指示を含む:
画像フレームの境界に沿って複数の境界ポジションを生成すること;
マッピング優先度、ビーム・プラットフォームの動く方向、及び前記ビーム・プラットフォームの動く速さのうちの少なくとも1つに基づいて、前記複数の境界ポジション内に第一ビーム用の開始ロケーションを決定すること;
前記開始ロケーションに基づいて、前記複数の境界ポジションを改変すること;
マッピング優先度、ビーム・プラットフォームの動く方向、及び前記ビーム・プラットフォームの動く速さのうちの少なくとも1つに基づいて、前記改変された複数の境界ポジション内に第二ビーム用の第二ロケーションを決定すること;並びに
前記第二ロケーションに基づいて、前記改変された複数の境界ポジションを改変すること。
【0006】
別の例において、上記アプローチのいずれかは、1以上の下記の特徴を含むことができる。
【0007】
幾つかの例において、前記システムは更に以下を備える:
グランド座標転換モジュールであって、開始ポジションをグランド座標に転換するために設計されたモジュールであり、前記グランド座標が画像ビーム装置のロケーションに対するグランドを表すモジュール;並びに、
通信モジュールであって、前記画像ビーム装置へ前記グランド座標を送るため、及び前記画像ビーム装置から画像ビームを受け取るために設計された該モジュール。
【0008】
別の例において、前記システムは、マッピング優先度モジュールを更に備え、該モジュールは、ビーム・サイズ、ビーム解像度、前記画像フレームの前記境界と前記開始ロケーションとの間のグランド・オーバーラップ、スポイルされていないビーム・サイズ、及びスポイルされたビーム・サイズのうち少なくとも1つに基づいて、前記マッピング優先度を決定するために設計される。
【0009】
幾つかの例において、前記システムは、マッピング優先度モジュールを更に備え、該モジュールは、最小限のマッピング時間、最小限のビームレイアウト、最高度のビーム・ユーティリティ、及び検出の最高確率のうち少なくとも1つに基づいて、前記マッピング優先度を決定するために設計される
【0010】
別の例において、前記ビーム・プラットフォームは、航空機又は宇宙機である。幾つかの例において、前記複数の各ビーム・ロケーションは、スポットライト・モード合成開口レーダー・ビームである。
【0011】
別の例において、前記方法は更に以下のステップを含む:
(f)前記改変された複数の境界ポジションにより、前記画像フレームの境界が定義されるかどうかを決定するステップ;並びに
(g)ステップ(f)における決定に基づいて、ステップ(d)、(e)及び(f)を繰り返すステップ。
【0012】
幾つかの例において、前記方法は更に以下のステップを含む:
(f)前記開始ロケーション及び前記第二ロケーションの少なくとも1つ内でターゲットが検出されるかどうかを決定するステップ;並びに
(g)ステップ(f)における決定に基づいて、ステップ(d)、(e)及び(f)を繰り返すステップ。
【0013】
別の例において、前記方法は更に以下のステップを含む:
前記開始ポジションをグランド座標に転換するステップであり、前記グランド座標が画像ビーム装置のロケーションに対する地上を表すステップ;
前記グランド座標を前記画像ビーム装置に送るステップ;及び
前記画像ビーム装置から画像ビームを受け取るステップ。
【0014】
幾つかの例において、前記方法は更に以下のステップを含む:
ビーム・サイズ、ビーム解像度、前記画像フレームの前記境界と前記開始ロケーションとの間のグランド・オーバーラップ、スポイルされていないビーム・サイズ、及びスポイルされたビーム・サイズのうち少なくとも1つに基づいて、前記マッピング優先度を決定するステップ。
【0015】
別の例において、前記方法は、更に以下のステップを含む:
最小限のマッピング時間、最小限のビームレイアウト、最高度のビーム・ユーティリティ、及び検出の最高確率の少なくとも1つに基づいて、前記マッピング優先度を決定するステップ。
【発明の効果】
【0016】
本明細書に記載の自動化されたビームのレイアウト技術は、以下に述べる1以上の利点を提供することができる。前記技術の利点として、エリア(画像フレーム)の優先度は、(例えば、アンテナ・スキャン角度限界、ビーム・サイズ等によって)入力及び/又は自動決定することが可能であり、それによって、エリア内でより優先度が高い部分にリソースを優先化させることができ、そして、エリアを画像化するための全体コストを下げることができる。前記技術の別の利点として、エリアの優先度は、近距離でのエリアに関するビーム・スポイリング及び/又は他のパラメーターに基づくことができ、それによって、エリアの画像化に関連する効果的なリソースの制限をゆるめることができ、また、エリアを画像化するための全体コストを下げることができる。
【0017】
前記技術の別の利点として、前記技術は、ビーム・プラットフォーム(例えば、航空機、宇宙機、列車、自動車等)の飛行プロファイルに適応可能であり、それによって、前記技術の効果的な使用を増やし、前記技術を展開させるためのコストを減らすことができる。前記技術の別の利点として、前記技術は、コンピューター的に効率が良く、それによって、前記技術に関するコンピューター的な必要性を減らし、前記技術を使用するためのコストを減らすことができる。
【0018】
上述した及び他の目的、特性、及び利点については、添付した図面に表される、より具体的な後述の実施形態から明らかとなるだろう。該図面において、同一の参照文字は、複数の異なる図面にわたって同一の部品を意味している。実施形態の原理を表す際に、該図面は、描写する代わりに、拡大・縮小や強調が必ずしも行われているとは限らない。
【図面の簡単な説明】
【0019】
【図1】図1は、例示的なビーム・プラットフォーム環境の図である。
【図2A】図2Aは、例示的なグランド座標の図である。
【図2B】図2Bは、例示的なアンテナ座標の図である。
【図3】図3A及び図3Bは、例示的な画像フレームの図である。
【図4A】図4Aは、画像フレームに関する例示的なビーム・レイアウト図である。
【図4B】図4Bは、画像フレームに関する例示的なビーム・レイアウト図である。
【図5】図5は、例示的なビーム・レイアウト・システムに関するブロック図である。
【図6】図6は、例示的なビーム・レイアウト・プロセスに関するフローチャートである。
【図7】図7は、別の例示的なビーム・レイアウト・プロセスに関するフローチャートである。
【発明を実施するための形態】
【0020】
詳細な説明
自動化されたビームのレイアウト用の方法及び装置では、完全なエリア・カバー、完全な画質、及び/又は高効率を達成する画像ビーム装置(例えば、スポットライト・モード合成開口レーダー(SAR)、カメラ、画像センサー等)を用いて、グランド・エリア(画像フレーム)を包括的にスキャンする技術を含む。該技術では、ビーム・プラットフォーム(例えば、航空機、宇宙機、列車、自動車等)を利用し、ビーム装置を用いて、グランド・エリアを画像化する。エリアに関する完全な又は部分的な画像は、前記ビームのスポットライト画像のモザイクによって形成することができる。
【0021】
各ビームを配置するためのプロセスに関する一般的な記載として、前記技術は、以下のステップを実行することができる:
(1)フレーム境界ポイントをアンテナ座標に変換するステップ、
(2)ビーム中心座標及び楕円形輪郭モデルを決定するステップ、
(3)どのフレーム・ポイントがビーム内にあるか、そして、どのビーム・ポイントがフレーム内にあるかを決定するステップ、
(4)ステップ(3)での出力に基づいて、フレーム境界ポイントを更新するステップ、
(5)フレーム境界ポイントを、グランド座標に戻して変換するステップ、
(6)航空機のポジションとグランドからアンテナへの変換行列とを更新するステップ、
(7)次のビームに関して、(1)〜(6)のステップを繰り返すステップ。
【0022】
前記技術により、マッピング・エリアとビームの両方に関する境界ポイントを作成することができ、埋まっていないホールの数を最小限にしたマッピングのエリアを最大化することができ、それによって、前記技術の効率を上昇させている点で有利となる。例えば、前記エリアは、10.0km×10.0kmの正方形であり、境界ポイントは、前記正方形の外側上に100mごとに存在する(この例の場合、400個の境界ポイントが正方形の外側上に存在する)。前記技術では、より優先度の高いエリア及び/又は得られる最大エリア(ビーム間での最小限のオーバーラップ)に基づいて、ビームの指向方向を決定することができ、それによって、エリアを画像化するための時間を減らすことができる。前記技術では、分析的な輪郭モデルとともにアンテナ座標を用いて、ビーム・ロケーションを決定し、それによって、フレーム境界ポイントがビーム内にあるかどうかを前記技術によって迅速且つ効率的に決定することが可能となる。
【0023】
図1は、例示的なビーム・プラットフォーム環境(100)の図である。前記環境(100)は、飛行機(142)(ビーム・プラットフォーム)を含む。飛行機(142)は、ビーム装置(図示しない)を用いて、画像フレーム(150)内のターゲット(155)(当該例では、戦車)を画像化する。飛行機(142)は、複数の時間(A 140a、B 140b〜Z 140z)において、ターゲット(155)を監視及び/又は追跡する。飛行機(142)は、電磁波を送信し、及び/又は受信し、前記ターゲット及び/又は複数の他のターゲット(図示しない)を画像化する。例えば、前記飛行機(142)は、電磁波を一定期間送信し、そして、前記複数の時間(A 140a、B 140b〜Z 140z)にわたって前記ターゲット(155)からの反射してきた電磁波を受け取る。飛行機(142)内のビーム装置は、ビーム・レイアウト・システム(図示しない)とデータ通信を行う(例えば、ターゲット(155)のレーダー反射のデジタル表現、ターゲット(155)に関する処理されたデータ表現等)。
【0024】
図1では、前記複数の時間(A 140a、B 140b〜Z 140z)を例示しているが、飛行機(142)は、ターゲットを画像化するために、任意の数の時間からの受信データを利用することができる。図1では1台の飛行機(142)を例示しているが、前記環境(100)は任意の数のビーム・プラットフォーム(例えば、10台の飛行機、100台の宇宙機等)を利用することができる。例えば、飛行機(142)は、同一のターゲット又は異なる複数のターゲットに関するレーダー・データを任意の数の飛行機から受信することができる。別の例において、飛行機(142)は、複数のレーダー、カメラ、及び/又は他のタイプのセンサー装置(例えば、モーション・センサー、環境センサー、熱センサー等)を備えることができる。
【0025】
図2Aは、SARスポットライト・マッピングのジオメトリに関する例示的なグランド座標(200)の図である。前記図は、飛行方向(230)のグランド投影に対応するのビーム・プラットフォームの飛行方向(220)と、ビーム・プラットフォームに関する交差方向(235)とを例示している。ビーム・プラットフォーム上のレーダー(225)は、画像フレーム(210)(グランド・エリア)のマッピング用のビームを送信し、及び/又は受信する。ビーム・プラットフォームは、画像フレーム(210)内のビーム中心ポイント(214)を決定し、レーダーを3dBのビーム輪郭(212)(当該例では、楕円形)で投影する。レーダー(225)は、特定の画像解像度を達成するためのパルスを送信し、そして、一定の時間間隔(合成開口間隔と呼ぶ)にわたって前記パルスからのレーダー反射を受信する。前記時間間隔の間、レーダーは、地上の同一のロケーションにビームを向けた状態を継続する。
【0026】
図2Bは、例示的なアンテナ座標(250)の図である。該図では、アンテナ座標(250)内にレーダー・ビーム輪郭(260)を例示しており、該輪郭は、グランド座標(200)内の図2Aのレーダー・ビーム輪郭(212)から変換されたものである。
【0027】
図3Aは、開始境界ポジションを有する例示的な画像フレーム(300)(当該例においては正方形)の図である。図3Aに表されているように、ビーム・レイアウト・システム (図示しない)は、境界ポジションを有する画像ビーム(310)のロケーションを決定する。図3Bは、例示的な改変された画像フレーム(350)の図である。ビーム・レイアウト・システムは、開始境界ポジションを有する画像フレーム(300)を改変し、改変された境界ポジションを有する画像フレーム(350)を形成する。ビーム・レイアウト・システムは、継続的に、画像ビームのロケーションを決定し、そして、画像ビームのロケーションに基づいて画像フレームを改変する。
【0028】
図4Aは、画像フレーム(400a)に関する例示的なビーム・レイアウトの図である。ビーム・レイアウトは、ビーム・プラットフォームの移動方向(410a)と、ビーム・プラットフォームの交差方向(420a)とに沿っている。ビーム・レイアウトは、複数のビームを含む(A 430a、B 430b、C 430c、D 430d、E 430e、F 430f、G 430g、H 430h、I 430i、J 430j、K 430k、L 430l、M 430m、及びN 430n)(包括的にビーム(430)と呼ぶ)。1以上のパラメーター(例えば、マッピング優先度、ビーム・プラットフォームの動く方向、前記ビーム・プラットフォームの動く速さ等)に基づいて、ビーム・レイアウト・システム (図示しない)は、画像フレーム(400a)内の中心ポイント(440a)を決定する。1以上のパラメーター(例えば、マッピング優先度、ビーム・プラットフォームの動く方向、前記ビーム・プラットフォームの動く速さ等)に基づいて、ビーム・レイアウト・システムは、ビーム(430)のレイアウトを決定する。表1では、ビーム・ロケーションに関連する例示的なパラメーターを例示する。
【0029】
【表1】
【0030】
図4Bは、画像フレーム(400b)に関する例示的なビーム・レイアウトの図である。ビーム・レイアウトは、ビーム装置の移動方向(410b)と、ビーム装置の交差方向(420b)とに沿っている。ビーム・レイアウトは、複数のビームを含む(A 440a、B 440b、C 440c、D 440d、E 440e、F 440f、G 440g、H 440h、I 440i、J 440j、K 440k、L 440l、M 440m、and N 440n)(包括的にビーム(440)と呼ぶ)。1以上のパラメーターに基づいて、ビーム・レイアウト・システム (図示しない)は、画像フレーム(400b)内の中心ポイント(440b)を決定する。中心ポイント(440b)は、地理的エリア、停止したターゲットのロケーション、既知のターゲットのロケーション、及び/又は前記技術に関連した任意の他のロケーションの中心を表すことができる。有利な点として、中心ポイント(440b)を決定することにより、前記技術は、更なる画像フレームを画像化している間、リソースの割り当てを最大化することができる。1以上のパラメーターに基づいて、ビーム・レイアウト・システムは、ビーム(440)のレイアウトを決定する。有利な点として、1以上のパラメーターに基づくビーム(440)のレイアウトにより、リソース割り当てを最大化している間、現実世界での限界に基づいて、前記技術がビーム・レイアウトをカスタマイズすることが可能になる。
【0031】
図5は、例示的なビーム・レイアウト・システム(510)のブロック図である。前記ビーム・レイアウト・システム(510)は、以下を備える:通信モジュール(511)、境界ポジション・モジュール(512)、ビーム・ロケーション・モジュール(513)、グランド座標転換モジュール(514)、マッピング優先度モジュール(515)、入力装置(591)、出力装置(592)、表示装置(593)、プロセッサ(594)、及びストレージ・デバイス(595)。本明細書に記載の前記モジュール及び装置は、例えば、コンピュータ実行可能指示を実行するためのプロセッサ(594)を利用することができ、及び/又はコンピュータ実行可能指示を実行するためのプロセッサを備えることができる(例えば、暗号化処理ユニット、現場でプログラム可能なゲートアレイ(FPGA)処理ユニット等)。ビーム・レイアウト・システム(510)は、例えば、他のモジュール、装置、及び/若しくは公知のプロセッサ、並びに/又は様々な種類の前記例示したモジュール、装置、及び/若しくはプロセッサを備えることが出来る点を理解されたい。
【0032】
通信モジュール(511)は、画像ビーム装置にグランド座標を送信し、そして、画像ビーム装置から画像ビームを受信する。通信モジュール(511)は、レーダー・データを受信する(例えば、レーダー・シグナル・データを、レーダー・プラットフォームから、仲介レーダー処理装置から、ストレージ・デバイスから等)。通信モジュール(511)は、ビーム・レイアウト・システム(510)へ/から情報を伝達する。通信モジュール(511)は、例えば、レーダー・プラットフォームに関連する情報を受け取ることができる。レーダー・プラットフォームに関連する情報は、データ・シグナルに関連づけることができる(例えば、レーダー・プラットフォームからデータ・シグナル、レーダー・プラットフォームからの処理されたデータ・シグナル、モーション・センサーからのデータ・シグナル、全地球測位システムからのデータ・シグナル、ロケーション・システムからのデータ・シグナル等)。
【0033】
境界ポジション・モジュール(512)は、複数の境界ポジションを画像フレームの境界に沿って生成し、前記複数の境界ポジションを、複数のビーム・ロケーションに基づいて改変する。有利な点として、複数の境界ポジションを生成すると、画像化する必要がある画像エリアに関するロケーション座標を用いて画像フレームを追跡することにより、前記技術に係るリソース要求が減少することになる。複数の境界ポジションと、マッピング優先度、ビーム・プラットフォームの動く方向、及び前記ビーム・プラットフォームの動く速さのうち少なくとも1つとに基づいて、ビーム・ロケーション・モジュール(513)は、複数のビーム・ロケーションを決定し、ここで、各複数のビーム・ロケーションは、画像フレームの境界内にある。有利な点として、複数のビーム・ロケーションが決定されると、1以上のパラメーターを利用することにより画像化した画像フレームが最大化される。グランド座標転換モジュール(514)は、開始ポジションをグランド座標に変換し、前記グランド座標は、画像ビーム装置のロケーションに対するグランドを表す。
【0034】
マッピング優先度モジュール(515)は、マッピング優先度を、以下の少なくとも1つに基づいて決定する:ビーム・サイズ、ビーム解像度、画像フレームの境界と開始ロケーションとのグランド・オーバーラップ、スポイルされていないビーム・サイズ、及びスポイルされたビーム・サイズ。別の例において、マッピング優先度モジュール(515)は、マッピング優先度を、以下の少なくとも1つに基づいて決定する:最小限のマッピング時間、最小限のビームレイアウト、最高度のビーム・ユーティリティ、及び検出の最高確率。有利な点として、マッピング優先度を決定すると、画像フレームの優先エリアにリソースを集中させることにより、画像化されるエリアの量及び/又は質を前記技術が向上させることができる。
【0035】
入力装置(591)は、ビーム・レイアウト・システム(510)に関連した情報(例えば、ユーザーからの指示、別のコンピューティングデバイスからの指示等)をユーザー(図示しない)から、及び/又は別のコンピューティングシステム(図示しない)から受け取る。入力装置(591)には、例えば、キーボード、スキャナー等を含めることができる。出力装置(592)は、ビーム・レイアウト・システム(510)に関連した情報を出力する(例えば、プリンタ(図示しない)に情報を出力する、スピーカーに情報を出力する等)。
【0036】
表示装置(593)は、ビーム・レイアウト・システム(510)に関連する情報(例えば、ステータス情報、設計情報等)を表示する。幾つかの例において、表示装置(593)は、対象物の分類を特定する可能性、及び/又はビーム・レイアウト・システム(510)に関連する他の任意の情報をオペレータに表示する。プロセッサ(594)は、オペレーティングシステムと、及び/又はビーム・レイアウト・システム(510)に関する他の任意のコンピュータ実行可能指示とを実行する(例えば、アプリケーションを実行する等)。
【0037】
ストレージ・デバイス(595)は、受信したデータ(例えば、実際のレーダー・データ、処理されたレーダー・データ等)、ビーム・レイアウト、及び/又はビーム・レイアウト・システム(510)に関連する任意の他のデータを記憶する。ストレージ・デバイス(595)は、画像情報、及び/又はビーム・レイアウト・システム(510)に関連する任意の他のデータを記憶することができる。ストレージ・デバイス(595)は、複数のストレージ・デバイスを含むことができ、及び/又はビーム・レイアウト・システム(510)は、複数のストレージ・デバイス(例えば、レーダー・ストレージ・デバイス、識別(identification)ストレージ・デバイス, 等)を含むことができる。ストレージ・デバイス(595)は、例えば、長期ストレージ(例えば、ハード・ドライブ、テープ・ストレージ・デバイス、フラッシュ・メモリ等)、短期ストレージ(例えば、ランダム・アクセス・メモリ、グラフィック・メモリ等)、及び/又は任意の他のコンピュータ読取可能ストレージを含むことができる。
【0038】
図6は、例えば、 図5のビーム・レイアウト・システム(510)を利用した例示的なビーム・レイアウト・プロセス(600)のフローチャートである。境界ポジション・モジュール(512)は、画像フレームの境界に沿って、複数の境界ポジションを生成し(610)、有利な点として、該生成により、画像化のための残りの画像フレーム内のエリアに関する境界を計算するのが容易になる。ビーム・ロケーション・モジュール(513)は、マッピング優先度、ビーム・プラットフォームの動く方向、及び前記ビーム・プラットフォームの動く速さのうちの少なくとも1つに基づいて、複数の境界ポジション内の第一ビーム用の開始ロケーションを決定(620)し、有利な点として、該決定により、画像化の優先順位をつけ、リソースの割り当てを最大化する。境界ポジション・モジュール(512)は、開始ロケーションに基づいて、複数の境界ポジションを改変する(630)。ビーム・ロケーション・モジュール(513)は、マッピング優先度、ビーム・プラットフォームの動く方向、及び前記ビーム・プラットフォームの動く速さのうち少なくとも1つに基づいて、改変された複数の境界ポジション内で第二ビーム用の第二ロケーションを決定する(640)。パラメーターに基づいてロケーションを決定することにより、前記技術は、ビーム装置及びビーム・プラットフォームの実際の制約に基づいて、ビーム・レイアウトをカスタマイズすることが可能になる。境界ポジション・モジュール(512)は、第二ロケーションに基づいて、改変された複数の境界ポジションを改変する(650)。境界ポジションを改変することにより、前記技術は、コンピュータ的に効率的な境界ポジションのインジケータを使用することを通して、別のビーム・ロケーションを効率的に決定することが可能となる。
【0039】
幾つかの例において、改変された複数の境界ポジションが画像フレームの境界を定義するかどうか(換言すれば、画像ビームによってカバーされない画像フレームの部分があるかどうか)を境界ポジション・モジュール(512)が決定する(660)。改変された複数の境界ポジションが画像フレームの境界内にある場合には、ビーム・ロケーション・モジュール(513)が処理を継続することによって、マッピング優先度、ビーム・プラットフォームの動く方向、及び前記ビーム・プラットフォームの動く速さのうち少なくとも1つに基づいて、改変された複数の境界ポジション内に別のビーム用の別のロケーションを決定する(640)。改変された複数の境界ポジションが画像フレームの境界の外にある場合には、処理は終了する(680)。有利な点として、ビーム・ロケーション・モジュール(513)による決定(640)は、効率的なコンピューテーションとなり、その原因としては、前記画像エリアの境界ポジション管理がシンプルとなるからであり、シンプルになることにより、前記決定(640)の為に必要となるリソースを減らし、画像レイアウト処理の速度を増加させるからである。
【0040】
別の例において、グランド座標転換モジュール(514)は、開始ポジションをグランド座標に転換する(672)。グランド座標は、画像ビーム装置のロケーションに対するグランドを表す。グランド座標転換モジュール(514)は、グランド座標を画像ビーム装置に送る(674)。グランド座標転換モジュール(514)は、画像ビーム装置から画像ビームを受け取る(676)。
【0041】
図7は、別の例示的なビーム・レイアウト プロセス(700)のフローチャートであり、例えば、図5のビーム・レイアウト・システム(510)を用いている。境界ポジション・モジュール(512)は、画像フレームの境界に沿って、複数の境界ポジション(710)を生成する。ビーム・ロケーション・モジュール(513)は、マッピング優先度、ビーム・プラットフォームの動く方向、及び前記ビーム・プラットフォームの動く速さのうち少なくとも1つに基づいて、複数の境界ポジション内の第一ビーム用の開始ロケーションを決定する(720)。境界ポジション・モジュール(512)は、開始ロケーションに基づいて、複数の境界ポジションを改変する(730)。ビーム・ロケーション・モジュール(513)は、マッピング優先度、ビーム・プラットフォームの動く方向、及び前記ビーム・プラットフォームの動く速さのうち少なくとも1つに基づいて、改変された複数の境界ポジション内の第二ビーム用の第二ロケーションを決定する(740)。境界ポジション・モジュール(512)は、第二ロケーションに基づいて、改変された複数の境界ポジションを改変する(750)。
【0042】
幾つかの例において、開始ロケーション、第二ロケーション、及び/又は任意の追加的ロケーションのうち少なくとも1つの中でターゲットが検出されるかどうかについて、境界ポジション・モジュール(512)が決定する(770)。ビーム・ロケーションについて優先順位をつけることによって、画像フレーム内のターゲットの位置を前記技術が効率的に特定することが可能となり、有利な点として、該効率的な特定により、ターゲットを検出するための時間を減らし、そして、ターゲットを検出するためのコストを減らることができる。もし、ターゲットが検出されない場合には、ビーム・ロケーション・モジュール(513)が処理を継続することによって、マッピング優先度、ビーム・プラットフォームの動く方向、及び前記ビーム・プラットフォームの動く速さのうち少なくとも1つに基づいて、改変された複数の境界ポジション内に別のビーム用の別のロケーションを決定する(740)。もし、ターゲットが検出された場合には、処理は終了する(780)。
【0043】
別の例において、マッピング優先度モジュール(515)は、ビーム・サイズ、ビーム解像度、前記画像フレームの前記境界と前記開始ロケーションとの間のグランド・オーバーラップ、スポイルされていないビーム・サイズ、及びスポイルされたビーム・サイズのうち少なくとも1つに基づいて、マッピング優先度を決定する(722及び/又は742)。幾つかの例において、マッピング優先度モジュール(515)は、最小限のマッピング時間、最小限のビームレイアウト、最高度のビーム・ユーティリティ、及び検出の最高確率のうち少なくとも1つに基づいて、マッピング優先度を決定する(722及び/又は742)。別の例において、マッピング優先度モジュール(515)は、任意の種類のパラメーター及び/又は複数のパラメーター組合せ(例えば、最小限のマッピング時間及びスポイルされていないビーム・サイズ、ビーム解像度及び検出の最高確率等)に基づいて、マッピング優先度を決定する(722及び/又は742)。幾つかの例において、マッピング優先度モジュール(515)は、画像エリアの予備知識、外部の手がかり、確率分布関数、地理的な特徴(例えば、道路、建物等)に基づいて、マッピング優先度を決定する(722及び/又は742)。有利な点として、前記技術は、マッピング優先度を利用して、リソース(例えば、航空機、プロセッサ、メモリ等)及び/又は時間(例えば、航空機の飛行時間、画像エリア上での時間等)の使用を最大限にし、それによって、画像フレームを画像化するためのコスト全体を減らす。表2は、例示的なマッピング優先度を表す。例えば、表2に表すように、ビームA(430a)は、最も高い優先順位となっており、理由としては、マッピングの時間が低いこと、及び中心ポイントへの距離が短いことが挙げられる。
【0044】
【表2】
【0045】
幾つかの例において、ビーム・プラットフォームは、航空機、宇宙機、及び/又は、任意の他の種類の移動プラットフォーム(例えば、列車、自動車等)である。別の例において、複数の各ビーム・ロケーションは、スポットライト・モード合成開口レーダー・ビームである。幾つかの例において、複数の各ビーム・ロケーションは、任意の種類のビーム(例えば、カメラビーム、赤外線ビーム等)及び/又は複数の種類のビームの任意の組合せである。
【0046】
別の例において、ビーム・レイアウト・システムは、画像エリアのサイズ、ビーム・サイズ、アンテナのデザイン、境界ポイントの必要な密度、並びに/又はビーム装置及び/若しくは画像エリアに関連する任意の他の情報に基づいて、画像エリア用の複数の境界ポイントを決定する。有利な点として、こうした複数の境界ポイントにおけるバリエーションにより、様々な状況や物理的な制約に前記技術が適応することができ、前記技術の効率を向上させる。幾つかの例において、最適の境界ポイントの数を決定するために、ビーム・レイアウト・システムは、ビーム・レイアウト・プロセスについてシミュレーションを行い、理由としては、境界ポイントが多すぎるとビーム・レイアウト・プロセスが遅くなる可能性があり、また、境界ポイントが少なすぎると、画像エリアの一部が失われることになる可能性があるからである。
【0047】
例示的な四角形のマッピング・エリアに関して、フレーム境界ポイントは、フレームに係る4本の境界線の集合である。ビーム・レイアウト・システムは、座標を以下の要素で決定する:フレーム中心座標
及び
;経路方向のフレーム・サイズ
;交差方向のフレーム・サイズ
;フレーム配向角
;経路方向の境界におけるフレーム・ポイントの数
;交差方向の境界におけるフレーム・ポイントの数
。フレーム・ポイントのトータル数は、
として、表され、ここで、
【数1】
である。
【0048】
更なる例として、フレーム境界ポイントは、経路方向座標である
と、交差方向座標である
とのポイントの組である。該組は、
として表され、ここで
【数2】
である。
【0049】
別の例において、最初の航空機のポジションを、第一ビームの計画されたマッピング時間に基づいて、航空機の情報から抽出する。ACD(経路方向、交差方向、及び下方向)におけるグランド座標と、UVWアンテナ座標(アンテナ・ノーマル(antenna normal)、長軸、及び短軸)との間の座標転換は、アンテナ・マウント角(antenna mounting angles)に基づいて決定される。もしも、
が、ACD座標からUVW座標への変換を表す場合には、該変換
は、
の逆座標変換となる。グランド座標におけるアンテナ・ボアサイト・ベクトルは
で表される。各フレーム・ポイントのアンテナ座標
は、座標転換を介して、前記フレーム・ポイントの指向ベクトルに基づいて得られ、以下に従って計算される:
【数3】
ここで、
【数4】
であり、
は、航空機の高度であり、
及び
は、航空機の経路方向座標及び交差方向座標をそれぞれ表す。
【0050】
別の例において、ビーム・レイアウト・システムは、各フレーム・ポイントに関するマッピングの優先度を定義し、有利な点として、該定義によって、画像フレームの実際の物理的制約に基づいてビーム・レイアウトをカスタマイズする。高優先度のポイントは、最も長いスラント・レンジ、最も短いスラント・レンジ、最大アジマス角、最小アジマス角、及び/又は他の測定値を有するフレームであってもよい。該例において、マッピング優先度については、アンテナ座標中の最大v値をフレーム・ポイント上に置くことができる。該優先順位化により、もうすぐスキャン限界になりそうなフレームの一部をマッピングが終了させることが可能になり、それによって、飛行経路下で画像フレーム全体が完全にマッピングされる確率を高め、エリアを再度画像化するための潜在的なコストを減らすことができる。最も高いマッピング優先度を持つフレーム・ポイントを得るためのプロセスは、全てのフレーム・ポイントから最大のv座標を見つけることであり、即ち、以下の式に従う。
【数5】
ここで、
【数6】
である。
【0051】
別の例において、ビーム・レイアウト・システムは、中心ポイントを決定し、有利な点として、該決定により、画像フレームのうち優先度がより高い部分に、ビーム・レイアウトを集中させる。ビーム・レイアウト・システムは、中心ポイントを決定するために以下のステップを進める/利用することができる。
【0052】
(1)
と
との間にあるv座標を有するフェーム・ポイント(fame points)を探すステップ。該ステップは、w座標においてサーチ・ウィンドウを決定するために使用することができる。下記の式
【数7】
を満たすフレーム・ポイントのセットは、
として表される。ここで、
は、v方向に沿ったビーム幅である。
【0053】
(2)w座標においてサーチ・ウィンドウ、すなわち、前記ステップからの全てのフレーム・ポイントの
を決定するステップ。ここで
は、
【数8】
であらわされ、
【数9】
である。
【0054】
(3)中心ポイントに関する全ての候補となるw値、すなわち
【数10】
(ここで、
【数11】
であり、
【数12】
である)を決定するステップ。
【0055】
(4)各候補の
に関して、ビーム中心の対応するv座標、すなわち
を決定するステップ。前述した、
は、ビームとフレームとの間の最大オーバーラップに基づいて計算される。フレーム・ポイントのサブセットは、
として表され、前記フレーム・ポイント
【数13】
は、
【数14】
と
【数15】
に従って、計算される。ビーム中心が以下の条件に従うのであれば、ビーム輪郭はフレーム・ポイントを含むことができる:
【数16】
(ここで、
【数17】
であり、
は、w方向に沿ったビーム幅である。そして、k番目のビームの中心のv座標は、
中の全てのフレームポイント
内での
の最大値、すなわち、
【数18】
によって表される。
【0056】
(5)
及び
で中心に位置するビームによって、フレームから集められたエリアを決定し、集められた最大値のエリアを有するビームを選択するステップ。最初のステップは、各ビーム内の全てのフレーム・ポイントを探すためのものである。
は、ビーム
内にあるフレーム・ポイントの集合である。
中のフレーム・ポイントは以下に従って計算される:
【数19】
(ここで、
【数20】
であり、
【数21】
であり、
【数22】
である)。そして、同一のフレーム・ポイントwを有する3dBのビーム輪郭の左側(更に低いv値を有するところ)のポイントのv座標を探す。
【数23】
また、k番目のビームとフレームとのオーバーラップしたエリアは、
内のフレーム・ポイントと、3dBのビーム輪郭の左側(更に低いv値を有するところ)の対応するビーム・ポイントとによって定義されるが、以下の式によって近似することができる:
【数24】
(ここで、
と、
は、アンテナ座標中のポイントである
のグランド座標であり、
と、
は、アンテナ座標中のポイントである
のグランド座標である)。
【0057】
(6)ビーム中心ポジションは、以前のステップで見出された最大エリアを有するものであり、以下の式にしたがって計算される:
【数25】
【数26】
(ここで、
【数27】
であり、
【数28】
である)。
【0058】
別の例において、ビーム・レイアウト・システムは、ビーム境界内にあるフレーム・ポイント (境界ポイント)を検出する。前記ポイントは、フレーム・ポイントの既存のセットから削除される。フレーム・ポイントを検出するために、ビーム・レイアウト・システムは、以下のステップを進める/利用することができる。
【0059】
(1)v座標が
を超えるフレーム・ポイントに関して、相対的なv及びwが最初に計算され、即ち、
【数29】
【数30】
である。
の方位角については、
【数31】
で表される。
【0060】
(2)前記方位角から、同方位角に関連したビーム・ポイントのラジアル距離を以下の式に従って生成する。
【数32】
【0061】
(3)フレーム・ポイントのラジアル距離が、対応するビーム・ポイントのラジアル距離よりも小さい場合には、フレーム・ポイントはビーム内にあることになり、従って、フレーム・ポイントのセットから除去される。
もしも、
【数33】
である場合には、
【数34】
となる。
従って、
【数35】
となる。
【0062】
別の例において、ビーム・レイアウト・システムは、経路方向での航空機のポジションと高度と、即ち
と
に基づいて、アンテナ指向ベクトルを、経路方向及び交差方向におけるグランド座標に転換する。こうしたプロセスは以下の通り表される。
【数36】
を更新されたフレーム境界ポイントのアンテナ座標とすると、ACD座標中の指向ベクトルに対応するものは、
【数37】
となり、ここで、
【数38】
である。更新されたフレーム・ポイントのグランド座標は、以下の式に従い計算される:
【数39】
及び
【数40】
。
【0063】
上記システム及び方法は、デジタル電子回路内、コンピュータのハードウェア、ファームウェア、及び/又はソフトウェア内で実行することができる。前記実行は、コンピュータ・プログラム製品として実行されてもよい。例えば、前記実行は、データ処理装置によって実行されるための、又は該処理装置の動作をコントロールするための機械読取可能ストレージ・デバイスで実行されてもよい。例えば、前記実行は、プログラム制御可能なプロセッサ、1台のコンピュータ、及び/又は複数のコンピュータで実行されてもよい。
【0064】
コンピュータ・プログラムは、任意の形態のプログラム言語で記述することができ、コンパイラ言語及び/又はインタプリタ言語が含まれ、また、コンピュータ・プログラムは、任意の形態で配置することができ、該形態として、スタンド・アロンなプログラムと、又はサブルーチンと、エレメントと、及び/又はコンピューティング環境での使用に適した他のユニットとが含まれる。コンピュータ・プログラムは、1台のコンピュータ上、又は1つのサイト上にある複数のコンピュータ上に配置して実行することができる。
【0065】
方法のステップについては、コンピュータ・プログラムを実行する1以上のプログラム制御可能なプロセッサによって実行することができ、入力データについて操作し、出力を生成することによって本発明の機能を実行することができる。また、方法のステップは、特定目的の論理回路によって実行することができ、そして、装置は、該回路として実装することができる。例えば、前記回路は、FPGA(現場でプログラム可能なゲートアレイ)及び/又はASIC (特定用途向けIC)であってもよい。サブルーチン及びソフトウェア・エージェントは、前記機能を実行するコンピュータ・プログラム、プロセッサ、特定回路、ソフトウェア、及び/又はハードウェアの一部を参照することができる。
【0066】
コンピュータ・プログラムの実行に適したプロセッサは、例示的な意味で、汎用目的及び特定目的の両方のマイクロプロセッサ、並びに任意の種類のデジタル・コンピュータの任意の1以上のプロセッサを含む。 一般的に、プロセッサは、リード・オンリ・メモリ、若しくはランダム・アクセス・メモリ、又はその両方からの指示及びデータを受け取る。コンピュータにおける不可欠な要素として、指示を実行するためのプロセッサと、指示及びデータを記憶するための1以上のメモリ装置がある。一般的に、データを記録するための1以上のマス・ストレージ・デバイス(例えば、磁気ディスク、光磁気ディスク、又は光学ディスク)からデータを受け取るために、及び/又はデータを該デバイスに送るためにコンピュータは機能的に連結してもよい。
【0067】
また、データ転送及び指示は通信ネットワークを介して行うこともできる。コンピュータ・プログラムの指示及びデータを実行するのに適したコンピュータ・プログラム製品は、あらゆる形態の不揮発性の メモリを含み、例示的な意味では、半導体メモリ装置が含まれる。コンピュータ・プログラム製品は、例えば、EPROM、EEPROM、フラッシュ・メモリ装置、磁気ディスク、内蔵型ハードディスク、リムーバブル・ディスク、光磁気ディスク、CD−ROM、及び/又はDVD−ROMディスクであってもよい。プロセッサ及びメモリは、特定目的の論理回路によって提供されてもよく、及び/又は該回路中に組み込まれても良い。
【0068】
ユーザーとの相互作用を提供するために、上記技術は、表示装置を有するコンピュータ上で実行することができる。前記表示装置は、例えば、CRT及び/又は液晶ディスプレイ(LCD)モニタであってもよい。ユーザーとの相互作用は、例えば、ユーザー対する情報に関する表示装置と、並びにキーボード及びポインティング・デバイス(例えば、マウス又はトラックボール)であってもよく、これらによって、ユーザーは、コンピュータに入力を提供することができる(例えば、ユーザー・インターフェース・エレメントとの相互作用)。ユーザーとの相互作用を提供するために他の種類の装置を使用することができる。他の装置として、例えば、任意の形態の感覚的フィードバック(例えば、視覚的フィードバック、聴覚的フィードバック、又は触覚的フィードバック)形態でユーザーに提供するフィードバックであってもよい。ユーザーからの入力は、例えば、任意の形態で受け取ることができ、音、音声、及び/又は触覚的入力が含まれる。
【0069】
上記技術は、バック・エンド・コンポーネントを含む分散されたコンピューティング・システム中で実施することができる。バック・エンド・コンポーネントは、例えば、データ・サーバー、ミドルウェア・コンポーネント、及び/又はアプリケーション・サーバーであってもよい。上記技術は、フロント・エンド・コンポーネントを含む分散させるコンピューティングシステム中で実施することができる。フロント・エンド・コンポーネントは、例えば、クライアント・コンピュータであってもよく、該コンピュータは、ユーザーが例示的な実施形態と相互作用可能にするグラフィカル・ユーザー・インターフェース、ウェブ・ブラウザ、及び/又は伝送装置に関連する他のグラフィカル・ユーザー・インターフェースを有することができる。システムの構成要素は、任意の形態、又はデジタル・データ通信の媒体(例えば、通信ネットワーク)によって相互に接続することができる。通信ネットワークの例として、LAN、ワイド・エリア・ネットワーク(WAN)、インターネット、有線ネットワーク、及び/又は無線ネットワークが挙げられる。
【0070】
システムは、クライアント及びサーバーを含むことができる。クライアント及びサーバーは、一般的に、互いに離れており、典型的には通信ネットワークを介して相互作用する。それぞれのコンピュータ上で実行され、及びクライアント−サーバーの関係を相互に有するコンピュータ・プログラムの手段により、クライアント及びサーバーの関係が生じる。
【0071】
パケットベースのネットワークとしては、例えば、以下のものが含まれる:インターネット、キャリア・インターネット プロトコル(IP)ネットワーク(例えば、ローカル・エリア・ネットワーク(LAN)、ワイド・エリア・ネットワーク(WAN)、キャンパス・エリア・ネットワーク(CAN)、メトロポリタン・エリア・ネットワーク(MAN)、ホーム・エリア・ネットワーク(HAN))、プライベートIPネットワーク、IP構内交換機(IPBX)、無線ネットワーク(例えば、無線アクセス・ネットワーク(RAN)、802.11ネットワーク、802.16ネットワーク、汎用パケット無線サービス(GPRS)ネットワーク、HiperLAN)、及び/又は他のパケットベースのネットワーク。回路ベースのネットワークとしては、例えば、以下のものが含まれる:公衆電話交換回線網(PSTN)、構内交換機(PBX)、無線ネットワーク(例えば、RAN、bluetooth(登録商標)、符号分割多元接続(CDMA)ネットワーク、時分割多元接続(TDMA)ネットワーク、モバイル通信用グローバル・システム(GSM)ネットワーク)、及び/又は他の回路ベースのネットワーク。
【0072】
伝送装置としては、例えば、以下の物が含まれる:コンピュータ、閲覧装置を備えるコンピュータ、電話、IP電話、携帯端末(例えば、携帯電話、個人情報端末(PDA)装置、ラップトップ・コンピュータ、電子メール装置)、及び/又は他の通信装置。前記閲覧装置は、例えば、WWWブラウザ (例えば、Microsoft Corporationから入手できるMicrosoft(登録商標)インターネット・エクスプローラ(登録商標)、Mozilla Corporationから入手できるMozilla(登録商標)Firefox)を備えるコンピュータ (例えば、 デスクトップ・コンピュータ, ラップトップ・コンピュータ)が含まれる。モバイル・コンピューティング・デバイスは、例えば、Blackberry(登録商標)が含まれる。
【0073】
「含む」「備える」(Comprise、include)、及び/又は各要素の複数形態は、オープンエンドであり、列挙された部分を含み、そして、列挙されていない追加部分を含むことができる。「及び/又は」(並びに/又は、及び/若しくは等についても同様)は、オープンエンドであり、1以上の列挙された部分を含み、列挙された部分の組合せも含む。
【0074】
本発明の思想及び本質的特徴から離れることなく、他の特定の形態で本発明を実施することができることを当業者は理解するであろう。従って、上記実施形態は、あらゆる意味において、本明細書に記載した本発明を限定するものではなく、例示的なものとして考慮すべきものである。よって、本発明の範囲については、上述した内容によってではなく、添付した特許請求の範囲によって表される。ゆえに、特許請求の範囲の意味するところ、及び該範囲の均等物の範囲に属する全ての改変についても、本発明の範囲内に含まれることを企図する。
【特許請求の範囲】
【請求項1】
自動化されたビームのレイアウトのためのシステムであって、前記システムは以下を備える:
境界ポジション・モジュールであって、
画像フレームの境界に沿って複数の境界ポジションを生成するため、及び
複数のビーム・ロケーションに基づいて前記複数の境界ポジションを改変するため
に設計された該モジュール;並びに
ビーム・ロケーション・モジュールであって、前記複数のビーム・ロケーションはそれぞれ前記画像フレームの前記境界内にあり、前記複数の境界ポジションと、並びにマッピング優先度、ビーム・プラットフォームの動く方向、及び前記ビーム・プラットフォームの動く速さのうちの少なくとも1つとに基づいて、前記複数のビーム・ロケーションを決定するために設計された該モジュール。
【請求項2】
請求項1に記載のシステムであって、更に以下を備えるシステム:
グランド座標転換モジュールであって、開始ポジションをグランド座標に転換するために設計されたモジュールであり、前記グランド座標が画像ビーム装置のロケーションに対するグランドを表すモジュール;並びに、
通信モジュールであって、前記画像ビーム装置へ前記グランド座標を送るため、及び前記画像ビーム装置から画像ビームを受け取るために設計された該モジュール。
【請求項3】
請求項1に記載のシステムであって、マッピング優先度モジュールを更に備え、該モジュールは、ビーム・サイズ、ビーム解像度、前記画像フレームの前記境界と前記開始ロケーションとの間のグランド・オーバーラップ、スポイルされていないビーム・サイズ、及びスポイルされたビーム・サイズのうち少なくとも1つに基づいて、前記マッピング優先度を決定するために設計される、該システム。
【請求項4】
請求項1に記載のシステムであって、マッピング優先度モジュールを更に備え、該モジュールは、最小限のマッピング時間、最小限のビームレイアウト、最高度のビーム・ユーティリティ、及び検出の最高確率のうち少なくとも1つに基づいて、前記マッピング優先度を決定するために設計される、該システム。
【請求項5】
請求項1に記載のシステムであって、前記ビーム・プラットフォームが航空機又は宇宙機である、該システム。
【請求項6】
請求項1に記載のシステムであって、前記複数の各ビーム・ロケーションは、スポットライト・モード合成開口レーダー・ビームである、該システム。
【請求項7】
自動化されたビームのレイアウトのための方法であって、以下のステップを含む方法:
(a)画像フレームの境界に沿って複数の境界ポジションを生成するステップ;
(b)マッピング優先度、ビーム・プラットフォームの動く方向、及び前記ビーム・プラットフォームの動く速さのうちの少なくとも1つに基づいて、前記複数の境界ポジション内に第一ビーム用の開始ロケーションを決定するステップ;
(c)前記開始ロケーションに基づいて、前記複数の境界ポジションを改変するステップ;
(d)マッピング優先度、ビーム・プラットフォームの動く方向、及び前記ビーム・プラットフォームの動く速さのうちの少なくとも1つに基づいて前記改変された複数の境界ポジション内に第二ビーム用の第二ロケーションを決定するステップ;並びに
(e)前記第二ロケーションに基づいて前記改変された複数の境界ポジションを改変するステップ。
【請求項8】
請求項7に記載の方法であって、更に以下のステップを含む方法:
(f)前記改変された複数の境界ポジションにより、前記画像フレームの境界が定義されるかどうかを決定するステップ;並びに
(g)ステップ(f)における決定に基づいて、ステップ(d)、(e)及び(f)を繰り返すステップ。
【請求項9】
請求項7に記載の方法であって、更に以下のステップを含む方法:
(f)前記開始ロケーション及び前記第二ロケーションの少なくとも1つ内でターゲットが検出されるかどうかを決定するステップ;並びに
(g)ステップ(f)における決定に基づいて、ステップ(d)、(e)及び(f)を繰り返すステップ。
【請求項10】
請求項7に記載の方法であって、更に以下のステップを含む方法:
前記開始ポジションをグランド座標に転換するステップであり、前記グランド座標が画像ビーム装置のロケーションに対するグランドを表すステップ;
前記グランド座標を前記画像ビーム装置に送るステップ;及び
前記画像ビーム装置から画像ビームを受け取るステップ。
【請求項11】
請求項7に記載の方法であって、ビーム・サイズ、ビーム解像度、前記画像フレームの前記境界と前記開始ロケーションとの間のグランド・オーバーラップ、スポイルされていないビーム・サイズ、及びスポイルされたビーム・サイズのうち少なくとも1つに基づいて、前記マッピング優先度を決定するステップを更に含む方法。
【請求項12】
請求項7に記載の方法であって、最小限のマッピング時間、最小限のビームレイアウト、最高度のビーム・ユーティリティ、及び検出の最高確率の少なくとも1つに基づいて、前記マッピング優先度を決定するステップを更に含む方法。
【請求項13】
コンピュータ・プログラム製品であって、情報キャリア内で具体的に実行され、前記コンピュータ・プログラム製品は、データ処理装置に以下の動作を実行させるように機能する指示を含む、該製品:
画像フレームの境界に沿って複数の境界ポジションを生成すること;
マッピング優先度、ビーム・プラットフォームの動く方向、及び前記ビーム・プラットフォームの動く速さのうちの少なくとも1つに基づいて、前記複数の境界ポジション内に第一ビーム用の開始ロケーションを決定すること;
前記開始ロケーションに基づいて、前記複数の境界ポジションを改変すること;
マッピング優先度、ビーム・プラットフォームの動く方向、及び前記ビーム・プラットフォームの動く速さのうちの少なくとも1つに基づいて、前記改変された複数の境界ポジション内に第二ビーム用の第二ロケーションを決定すること;並びに
前記第二ロケーションに基づいて、前記改変された複数の境界ポジションを改変すること。
【請求項1】
自動化されたビームのレイアウトのためのシステムであって、前記システムは以下を備える:
境界ポジション・モジュールであって、
画像フレームの境界に沿って複数の境界ポジションを生成するため、及び
複数のビーム・ロケーションに基づいて前記複数の境界ポジションを改変するため
に設計された該モジュール;並びに
ビーム・ロケーション・モジュールであって、前記複数のビーム・ロケーションはそれぞれ前記画像フレームの前記境界内にあり、前記複数の境界ポジションと、並びにマッピング優先度、ビーム・プラットフォームの動く方向、及び前記ビーム・プラットフォームの動く速さのうちの少なくとも1つとに基づいて、前記複数のビーム・ロケーションを決定するために設計された該モジュール。
【請求項2】
請求項1に記載のシステムであって、更に以下を備えるシステム:
グランド座標転換モジュールであって、開始ポジションをグランド座標に転換するために設計されたモジュールであり、前記グランド座標が画像ビーム装置のロケーションに対するグランドを表すモジュール;並びに、
通信モジュールであって、前記画像ビーム装置へ前記グランド座標を送るため、及び前記画像ビーム装置から画像ビームを受け取るために設計された該モジュール。
【請求項3】
請求項1に記載のシステムであって、マッピング優先度モジュールを更に備え、該モジュールは、ビーム・サイズ、ビーム解像度、前記画像フレームの前記境界と前記開始ロケーションとの間のグランド・オーバーラップ、スポイルされていないビーム・サイズ、及びスポイルされたビーム・サイズのうち少なくとも1つに基づいて、前記マッピング優先度を決定するために設計される、該システム。
【請求項4】
請求項1に記載のシステムであって、マッピング優先度モジュールを更に備え、該モジュールは、最小限のマッピング時間、最小限のビームレイアウト、最高度のビーム・ユーティリティ、及び検出の最高確率のうち少なくとも1つに基づいて、前記マッピング優先度を決定するために設計される、該システム。
【請求項5】
請求項1に記載のシステムであって、前記ビーム・プラットフォームが航空機又は宇宙機である、該システム。
【請求項6】
請求項1に記載のシステムであって、前記複数の各ビーム・ロケーションは、スポットライト・モード合成開口レーダー・ビームである、該システム。
【請求項7】
自動化されたビームのレイアウトのための方法であって、以下のステップを含む方法:
(a)画像フレームの境界に沿って複数の境界ポジションを生成するステップ;
(b)マッピング優先度、ビーム・プラットフォームの動く方向、及び前記ビーム・プラットフォームの動く速さのうちの少なくとも1つに基づいて、前記複数の境界ポジション内に第一ビーム用の開始ロケーションを決定するステップ;
(c)前記開始ロケーションに基づいて、前記複数の境界ポジションを改変するステップ;
(d)マッピング優先度、ビーム・プラットフォームの動く方向、及び前記ビーム・プラットフォームの動く速さのうちの少なくとも1つに基づいて前記改変された複数の境界ポジション内に第二ビーム用の第二ロケーションを決定するステップ;並びに
(e)前記第二ロケーションに基づいて前記改変された複数の境界ポジションを改変するステップ。
【請求項8】
請求項7に記載の方法であって、更に以下のステップを含む方法:
(f)前記改変された複数の境界ポジションにより、前記画像フレームの境界が定義されるかどうかを決定するステップ;並びに
(g)ステップ(f)における決定に基づいて、ステップ(d)、(e)及び(f)を繰り返すステップ。
【請求項9】
請求項7に記載の方法であって、更に以下のステップを含む方法:
(f)前記開始ロケーション及び前記第二ロケーションの少なくとも1つ内でターゲットが検出されるかどうかを決定するステップ;並びに
(g)ステップ(f)における決定に基づいて、ステップ(d)、(e)及び(f)を繰り返すステップ。
【請求項10】
請求項7に記載の方法であって、更に以下のステップを含む方法:
前記開始ポジションをグランド座標に転換するステップであり、前記グランド座標が画像ビーム装置のロケーションに対するグランドを表すステップ;
前記グランド座標を前記画像ビーム装置に送るステップ;及び
前記画像ビーム装置から画像ビームを受け取るステップ。
【請求項11】
請求項7に記載の方法であって、ビーム・サイズ、ビーム解像度、前記画像フレームの前記境界と前記開始ロケーションとの間のグランド・オーバーラップ、スポイルされていないビーム・サイズ、及びスポイルされたビーム・サイズのうち少なくとも1つに基づいて、前記マッピング優先度を決定するステップを更に含む方法。
【請求項12】
請求項7に記載の方法であって、最小限のマッピング時間、最小限のビームレイアウト、最高度のビーム・ユーティリティ、及び検出の最高確率の少なくとも1つに基づいて、前記マッピング優先度を決定するステップを更に含む方法。
【請求項13】
コンピュータ・プログラム製品であって、情報キャリア内で具体的に実行され、前記コンピュータ・プログラム製品は、データ処理装置に以下の動作を実行させるように機能する指示を含む、該製品:
画像フレームの境界に沿って複数の境界ポジションを生成すること;
マッピング優先度、ビーム・プラットフォームの動く方向、及び前記ビーム・プラットフォームの動く速さのうちの少なくとも1つに基づいて、前記複数の境界ポジション内に第一ビーム用の開始ロケーションを決定すること;
前記開始ロケーションに基づいて、前記複数の境界ポジションを改変すること;
マッピング優先度、ビーム・プラットフォームの動く方向、及び前記ビーム・プラットフォームの動く速さのうちの少なくとも1つに基づいて、前記改変された複数の境界ポジション内に第二ビーム用の第二ロケーションを決定すること;並びに
前記第二ロケーションに基づいて、前記改変された複数の境界ポジションを改変すること。
【図1】

【図2A】
【図2B】

【図3】
【図4A】
【図4B】
【図5】
【図6】
【図7】
【図2A】
【図2B】
【図3】
【図4A】
【図4B】
【図5】
【図6】
【図7】
【公開番号】特開2012−230098(P2012−230098A)
【公開日】平成24年11月22日(2012.11.22)
【国際特許分類】
【外国語出願】
【出願番号】特願2011−281560(P2011−281560)
【出願日】平成23年12月22日(2011.12.22)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.GSM
【出願人】(503455363)レイセオン カンパニー (244)
【Fターム(参考)】
【公開日】平成24年11月22日(2012.11.22)
【国際特許分類】
【出願番号】特願2011−281560(P2011−281560)
【出願日】平成23年12月22日(2011.12.22)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.GSM
【出願人】(503455363)レイセオン カンパニー (244)
【Fターム(参考)】
[ Back to top ]