
自動化ウェハ欠陥検査システムおよびこのような検査を実行する方法
【課題】現在の手動検査プロセスを置き換える自動化検査システムおよび方法を提供すること。
【解決手段】自動化欠陥検査システム(10)が発明され、これはパターン化されたウェハ、全ウェハ、破損ウェハ、部分ウェハ、ワッフルパック、MCMなどを検査するために使用される。この検査システムは、特に、スクラッチ、ボイド、腐食およびブリッジング、などの金属化欠陥、ならびに拡散欠陥、被覆保護層欠陥、書きこみ欠陥、ガラス絶縁欠陥、切込みからのチップおよびクラック、半田隆起欠陥、ボンドパッド領域欠陥、などの欠陥のための第二の光学的ウェハ検査のために意図され、そして設計される。
【解決手段】自動化欠陥検査システム(10)が発明され、これはパターン化されたウェハ、全ウェハ、破損ウェハ、部分ウェハ、ワッフルパック、MCMなどを検査するために使用される。この検査システムは、特に、スクラッチ、ボイド、腐食およびブリッジング、などの金属化欠陥、ならびに拡散欠陥、被覆保護層欠陥、書きこみ欠陥、ガラス絶縁欠陥、切込みからのチップおよびクラック、半田隆起欠陥、ボンドパッド領域欠陥、などの欠陥のための第二の光学的ウェハ検査のために意図され、そして設計される。
【発明の詳細な説明】
【技術分野】
【0001】
(関連出願の参照)
本出願は、1998年7月15日に出願された、米国仮特許出願第60/092923号および同第60/092701号の利益を主張する。
【0002】
(発明の背景)
(技術分野)
本発明は、半導体産業のための欠陥検査システムに関係する。より詳細には、本発明は、フィルムフレーム上、JEDECトレイ、Auerボート、ゲルパックまたはワッフルパック(waffle pack)のダイ、MCMとしばしば呼ばれる多チップモジュールなどのような、パターンウェハ(patterned wafer)、全ウェハ、切込みウェハ(sawn wafers)のための自動化欠陥検査システムに関し、これは、具体的には、金属被膜(metalization)欠陥(スクラッチ、ボイド、腐食、ブリッジング)、拡散欠陥、パシベーション層欠陥、スクライビング欠陥、ガラス絶縁欠陥、切込み由来のチップおよびクラック、および隆起またはボンドパッド領域欠陥(例えば、金またはハンダ隆起欠陥あるいは類似の相互接続欠陥)のような欠陥のための第2の光学ウェハ検査について意図され、設計される。具体的には、本発明は、集積回路、写真平板回路網を埋めこまれたLCDパネルなどの自動化欠陥検査システムであり、ここで、このシステムは、以下のように使用される:このシステムは、優良なダイモデルを生じる画像ヘッド下で複数の既知の優良なダイを観察することによって訓練され、検査レシピが検査パラメータを規定するためにシステムに入力され、ダイが装填され、整列され、優良なダイモデルとの比較で欠陥について画像ヘッドによって観察される場所で欠陥検査が行われ、確認された欠陥の任意の評価が行われ得、ユーザーは、必要に応じてその報告を受容または出力し得る。
【背景技術】
【0003】
(背景の情報)
過去数十年に渡って、半導体は、使用および一般性において指数関数的に成長している。半導体は、コンピューター、エレクトロニクスの進歩を導入し、一般的に、多くの以前には困難、高価および/または時間を消費する機械プロセスを単純化した素早い電気的プロセスに変革することによって、事実上、社会に変革をもたらした。半導体におけるこのブームは、コンピュータおよびエレクトロニクス、より具体的には、それが組立ラインにて、研究室の試験設備にて、机上のパソコンにて、またはホームエレクトロニクスおよびおもちゃにてであるかどうかにかかわらず、より速く、より進歩したコンピュータおよびエレクロトニクスについてのビジネスおよび個人による飽くことのない望みによって刺激されている。
【0004】
半導体の製造は、最終製品の品質、スピード、および実行において、ならびに製造プロセスの品質、スピード、および性能において大きな改善がなされている。しかし、より速く、より信頼性があり、より高い性能の半導体に対する需要が続いている。
【0005】
過去十年ほどに渡って発展された1つのプロセスは、半導体検査プロセスである。製造プロセス全体に渡って半導体を検査する際の利点は、不良なウェハが最終検査によるかまたは使用時の失敗によるのいずれかによって完成までプロセスされて欠陥が存在することが分かるのみではなく、種々の工程で除かれ得る点で明らかである。
【0006】
半導体製造プロセスの典型的な例は、以下のように要約される。裸全ウェハが製造される。その後、回路網が裸全ウェハ上に作製される。次いで、回路網を有する全ウェハは、ダイとしてこの産業において公知のより小さなピースに切込みされる。その後、ダイは、当該分野で周知の、典型的には、ワッフルパックおよび/またはゲルパックにあるいは基板のダイとしてプロセスされる。
【0007】
今日、種々の検査プロセスがこの半導体プロセスの間に行われることが周知である。裸ウェハ検査は、砂から最初に作製した後および/またはそのウェハの洗浄の後の長時間後ではなく、必ず回路網を形成するいずれの層の堆積の前に、裸全ウェハで行われ得る。裸ウェハ検査の間に検査される欠陥には、表面粒子、および表面不完全または不規則が挙げられる。
【0008】
層の堆積の間(これは、回路構築である)、全ウェハ上で、1つ以上の第1光学検査が行われ得る。第1光学検査は、回路網作製の間のウェハの「プロセス中」検査である。この第1検査は、それぞれの層が堆積した後に、あまり頻繁ではない間隔で、または1度だけ、全ての堆積の間またはその後であり得る。この第1の光学検査は、普通、0.1ミクロンから<1ミクロンの範囲でサブミクロンレベルである。このプロセスは、マスク位置合わせまたは余分な金属、不足の金属、混入物などのような欠陥をチェックするために使用される。この第1の検査は、ウェハの回路網発展の間に行われる。
【0009】
一旦、全ウェハが少なくとも完全に堆積する(全ての回路網がその上に作製される)と、ポスト第1(または第1.5)検査は、完全にプロセスされた全ウェハで行われる。一般的に、これは、パシベーション層の堆積の前であるが、その必要はない。さらに、このポスト第1検査は、一般的に、全ウェハの電気的検査またはプロ−ビングの前である。この検査は、典型的に、0.5ミクロン〜1ミクロンの光学的検査である。
【0010】
全ウェハが完全にプロセスされた後に、1以上の第2光学検査が行われる。前部端(front end)第2光学検査は、全ウェハが完全にプロセスされた後に、プロービングが必要な場合には、デバイスの品質を決定するためのこのプロービングまたは電気的試験の直前または直後に行われる。後部端(back end)第2光学検査は、ダイまたはウェハに隆起を適用する間、ウェハを切込み(sawn)ウェハに切込みをする間またはその後、ウェハをさいの目に切る間またはその後、ダイを摘み上げ、トレイもしくはワッフルパックもしくはゲルパックのような他のパッケージに置く間またはその後、ウェハを基盤上に置く間またはその後などのような種々の段階で行われる。この第2光学検査は、一般的に、1+ミクロンのレベルであり、一般的に、金属被膜欠陥(例えば、スクラッチ、ボイド、腐食、およびブリッジング)、拡散欠陥、パシベーション層欠陥、スクライビング欠陥、ガラス絶縁欠陥、切込み由来のチップおよびクラック、およびプローブまたはボンドパッド領域欠陥である。
【0011】
実際のパッケージングの後に、第3光学検査が行われる。このパッケージングは、以下のうちの少なくとも1つを含む:ダイを基板上に配置する工程、ダイをワイヤーボンディングする工程、リード線を接続する工程、フリップチップにボールを接続する工程など。この時点で、検査は、ボールグリッドアレイ、リード線直線性、ワイヤーボンディング、インクマーキング、および任意のパーケージに対する欠陥(例えば、チップ、クラックおよびボイド)を検査する工程を含む。この第3のレベルの検査は、一般的に、5+ミクロンのレベルである。
【0012】
この半導体検査産業の焦点は、裸ウェハおよび第1光学検査である。多くの業界大手が、ADE、KLA、Tencor、Inspex、Applied、Orbitなどを含むこれらの検査を実行するための第1光学検査システムを開発し、特許化し、製造し、市販している。
【0013】
しばしば、この装置は、非常に高価で大きい。第1検査段階では、この費用および機械の大きさの問題は、後の検査段階ほどには重要ではない。なぜなら、比較的少数の団体のみがシリコンウェハを製造し、従って、裸または切込みウェハを購入し、さらにこれらを最終チップにプロセスする非常に多くの会社と比較すれば、裸ウェハを検査することが必要であるからである。これらは、しばしば、高価で大きな検査デバイスは、より小さな店などに対して費用が正当ではなく、第2および第3段階における必要性を満足し、そしてプロセスウェハを仕上げる非常に多くのより小さな会社に対してより経済的な検査装置が必要である。
【0014】
より少ない程度、いくらかの資金が第3光学検査に費やされ、STI、View Engineering、RVSI、およびICOSを含むいくらかの会社がこの目的のためにシステムを開発し、それらのシステムを市販している。
【0015】
しかし、これらのシステムのいずれも、第2光学の特定および独特の制約に取り組まず、この領域は大部分無視されている。実際の適用において、第2の光学検査は、人および顕微鏡装置を使用する手動の検査によってわずかに実行されている。この手動のプロセスは、操作者のストレス、目の疲労、倦怠ならびに、発見の重要性についての、異なる操作者による異なる認知を含む種々の因子のために不正確である。さらに、より小さな回路形状、およびより高いスループット要求がこの第2光学レベルにおける半導体検査における要求を増しており、これら全ては、さらに操作者のストレス、目の疲れ、および時々より低い品質という結果になる。
【0016】
金属被膜欠陥(スクラッチ、ボイド、腐食、およびブリッジング)、拡散欠陥、パシベーション層欠陥、スクライビング欠陥、ガラス絶縁欠陥、切込み由来のチップおよびクラックなどに対する検査についての必要に対する第2の光学検査段階に加えて、隆起が最近さらに重要になっている。これは、リード線よりも、隆起インターフェース接続またはフリップチップの使用における最近の流れのためであり、第2光学検査の重要性を拡大し、従って手動検査を越える装置およびシステムの必要性がある。
【発明の概要】
【発明が解決しようとする課題】
【0017】
(本発明の目的および要旨)
現在の手動検査プロセスを置き換える自動化検査システムを提供することが本発明の目的である。
【0018】
第2光学検査システム技術の新規な状態を提供することが本発明のさらなる目的である。
【0019】
パターンウェハ、全ウェハ、切込みウェハ、JEDECトレイ、Auerボート、ゲルパックまたはワッフルパックのダイ、MCMなどの自動化欠陥検査システムを提供することが本発明のさらなる目的である。
【0020】
第2光学ウェハ検査を特に意図し、そのために設計された自動化欠陥検査システムを提供することが本発明のさらなる目的である。
【0021】
金属被膜欠陥(スクラッチ、ボイド、腐食、ブリッジング)、拡散欠陥、パシベーション層欠陥、スクライビング欠陥、ガラス絶縁欠陥、切込み由来のチップおよびクラック、プローブ領域欠陥、隆起領域欠陥および/またはボンドパッド領域欠陥のような欠陥を検査するために自動化欠陥検査システムを提供することが本発明のさらなる目的である。
【0022】
各ウェハの各ダイの手動顕微鏡検査の必要性を除くまたは有意に減らす自動化欠陥検査システムを提供することが本発明のさらなる目的である。
【0023】
正確で素早い方法でさらに小さい回路形状を観察する自動化欠陥検査システムを提供することが本発明のさらなる目的である。
【0024】
手動検査よりもより高いスループットを提供する自動化欠陥検査システムを提供することが本発明のさらなる目的である。
【0025】
改善された検査の質および一貫性を提供する自動化欠陥検査システムを提供することが本発明のさらなる目的である。
【0026】
改善されたプロセスコントロールを提供する自動化欠陥検査システムを提供することが本発明のさらなる目的である。
【0027】
検査レシピを有し、ユーザーの検査要求に対してシステムをカスタマイズするためにこのようなレシピを作成し、コピーし、編集する自動化欠陥検査システムを提供することが本発明のさらなる目的である。
【0028】
半導体ウェハ観察を実行するためにデジタルイメージを使用する自動化欠陥検査システムを提供することが本発明のさらなる目的である。
【0029】
優良なダイを検査することによって訓練され、その結果、一旦、訓練されるとシステムがそれが学習したことから変化を検出する自動化欠陥検査システムを提供することが本発明のさらなる目的である。
【0030】
訓練可能な自動化欠陥検査システムを提供することが本発明のさらなる目的である。
【0031】
優良なダイのモデルを開発し、このモデルを未知の品質のダイを検査するために使用する自動化欠陥検査システムを提供することが本発明のさらなる目的である。
【0032】
優良なダイモデルを使用して、「優良ダイ」訓練工程および欠陥検査工程を含む自動化欠陥検査システムを提供することが本発明のさらなる目的である。
【0033】
「優良ダイ」訓練工程、検査レシピ作成工程、および欠陥検査工程を含む自動化欠陥検査システムを提供することが本発明のさらなる目的である。
【0034】
「優良ダイ」訓練工程、検査レシピ作成工程、欠陥検査工程、欠陥評価工程、および報告発行または出力工程を含む自動化欠陥検査システムを提供することが本発明のさらなる目的である。
【0035】
各ダイが均一に位置されるように、各ウェハ、基板、または検査されるためのダイを備える他のデバイスの多次元調節を提供する自動化欠陥検査システムを提供することが本発明のさらなる目的である。
【0036】
各ダイが均一に配置されるように、各ウェハ、基板、または検査されるためのダイを備える他のデバイスのx、y、シータ(θ)調節を提供する自動化欠陥検査システムを提供することが本発明のさらなる目的である。
【0037】
各ウェハの粗(course)調節、微細調節、および/または焦点化を提供する自動化欠陥検査システムを提供することが本発明のさらなる目的である。
【0038】
多数の優良なダイを観察し、それからモデルを発展させることによって「優良なダイ」のモデリングを提供する自動化欠陥検査システムを提供することが本発明のさらなる目的である。
【0039】
静的および適切に整列されたダイを観察するための画像ヘッドまたはカメラを使用する欠陥検査を提供する自動化欠陥検査システムを提供することが本発明のさらなる目的である。
【0040】
動的にまたは動きながらなお適切に整列されたダイを観察するための画像ヘッドまたはカメラを使用する欠陥検査を提供する自動化欠陥検査システムを提供することが本発明のさらなる目的である。
【0041】
動的にまたは動きながらなお適切に整列されたダイを観察するための画像ヘッドまたはカメラを使用する欠陥検査を提供する自動化欠陥検査システムを提供することが本発明のさらなる目的であって、ここで、ストロボ照射が動的に動くダイの静止図を撮るために使用される。
【0042】
欠陥を検出されたシステムの評価を提供する自動化欠陥検査システムを提供することが本発明のさらなる目的であって、これによってユーザーが全てのダイまたはダイの全ての部分を見る必要がなく、代わりにマークされたまたは気付いた欠陥を観察するだけである。
【0043】
ダイ位置または間隔のドリフティングまたは不規則性を説明する方法を提供する自動化欠陥検査システムを提供することが本発明のさらなる目的である。
【0044】
ダイが不規則に間隔が置かれ、回転され、ドリフトされるなどである延ばされたフィルムフレームを検査するための手段を提供する自動化欠陥検査システムを提供することが本発明のさらなる目的である。
【0045】
サイズ、位置、形、形状ならびにハンダ隆起、金隆起、ボンドパッドなどの他の特徴を測定するための方法を提供する自動化欠陥検査システムを提供することが本発明のさらなる目的である。
【0046】
金隆起、ハンダ隆起、相互接続などの質、またはボンドパッド上のプローブマークを検査するための方法を提供する自動化欠陥検査システムを提供することが本発明のさらなる目的である。
【0047】
ボンドパッド、隆起または相互接続の欠陥を検出するための方法を提供する自動化欠陥検査システムを提供することが本発明のさらなる目的である。
【課題を解決するための手段】
【0048】
本発明のなお他の利点および利益は、以下の要約および詳細な説明を読んで理解することによって当業者に明らかになる。
【0049】
従って、本発明は、これらおよび他の目的を満足し、これは自動化検査装置、システムおよびプロセスに関係する。具体的には、本発明は、全パターンウェハ、切込みウェハ、破損ウェハ、部分ウェハ、およびフィルムフレーム上の任意の種類のウェハ、ダイ、ゲルパックのダイ、ワッフルパックのダイ、しばしばMCMと呼ばれる多チップモジュール、JEDECトレイ、Auerボート、ならびに検出のための他のウェハおよびダイパッケージ構成を含む任意の形態の半導体ウェハを検査する自動化方法であり、この方法は、(1)複数の既知の優良ウェハの光学的観察によって優良なウェハのパラメータについてモデルを訓練する工程、および(2)このモデルを使用する未知の品質のウェハを検査する工程を包含する。
【0050】
例えば、本発明は以下の項目を提供する。
【0051】
(項目1)自動化方法であって、全パターン化ウェハ、切込みウェハ、破損ウェハ、部分ウェハ、およびフィルムフレーム上の任意の種類のウェハ、ダイ、ゲルパックのダイ、ワッフルパックのダイ、MCMと呼ばれる多チップモジュール、JEDECトレイ、Auer ボート、ならびに他のウェハおよびダイパッケージ形状を含む、任意の形態における半導体ウェハを欠陥について検査する自動化方法であり、該方法は、以下の工程:
複数の既知の良好なウェハの光学的観察を介して、良好なウェハのパラメータに関してモデルを訓練する工程;および
未知の品質のウェハを該モデルを使用して検査する工程、
を包含する方法。
【0052】
(項目2)上記モデルを訓練する工程が、カメラを介して複数の既知の良好なウェハを整列させる工程、および観察する工程を包含する、項目1に記載の自動化検査方法。
【0053】
(項目3)上記モデルを訓練する工程が、上記複数の既知の良好なウェハの各々の画素の格子における各画素のグレイスケール測定をする工程、を包含する項目2に記載の自動化検査方法。
【0054】
(項目4)上記モデルを訓練する工程が、0から255スケールまでの各画素の上記グレイスケール測定をする工程、をさらに包含する、項目3に記載の自動化検査方法。
【0055】
(項目5)上記モデルを訓練する工程が、上記複数の既知の良好なウェハにおいて、各画素に対するすべての上記グレイスケール測定の平均および標準偏差を計算する工程をさらに包含する、項目3に記載の自動化検査方法。
【0056】
(項目6)上記複数の既知の良好なウェハの、各画素に対する全ての上記グレイスケール測定の上記平均および標準偏差を計算する工程が、上限及び下限を提供し、その間において、未知の品質のウェハにおける等価な画素におけるグレイスケール測定が良好とされるが、一方で該上限および下限の外側の、未知の品質のウェハにおける等価の画素におけるグレイスケール測定が、少なくとも疑わしい完全性とされる、項目5に記載の自動化検査方法。
【0057】
(項目7)どれくらい多くの標準偏差が、上記平均から離れているかを示す値である検査パラメータが、上記上限および上記下限を規定する際に、受容可能であるかに関して、システムを訓練する工程をさらに包含する、項目6に記載の自動化検査方法。
【0058】
(項目8)ウェハの調節機能およびパラメータに関して、システムを訓練する工程をさらに包含する、項目1に記載の自動化検査方法。
【0059】
(項目9)少なくとも以下:ウェハ形状、ウェハサイズ、ウェハ上のダイ形状、ウェハ上のダイサイズ、ウェハ上のダイの行の数、ウェハ上のダイの列の数、の1つに関してシステムを訓練する工程をさらに包含する、項目1に記載の自動化検査方法。
【0060】
(項目10)検査パラメータに関してシステムを訓練する工程をさらに包含する、項目1に記載の自動化検査方法。
【0061】
(項目11)少なくとも以下:基板がどのように格納容器から選択されるかを規定する工程、ウェハ上のダイが欠陥検査のためにどのように選択されるかを規定する工程、および必要であれば、どのように検査マップが入力され、または出力されるかを規定する工程、のうちの1つの工程を実行するための検査の間に使用される検査レシピを作製する工程をさらに包含する、項目1に記載の自動化検査方法。
【0062】
(項目12)検査の完了に次いで欠陥評価する工程をさらに包含し、それにより良好なウェハモデルに合わないダイのみが評価される、項目1に記載の方法。
【0063】
(項目13)自動化システムであって、全パターンウェハ、切込みウェハ、破損ウェハ、部分ウェハ、およびフィルムフレーム上の任意の種類のウェハ、ダイ、ゲルパックのダイ、ワッフルパックのダイ、しばしばMCMと呼ばれる多チップモジュール、JEDECトレイ、Auer ボート、ならびに他のウェハおよびダイパッケージ形状、を含む任意の形態のウェハなどの基板を欠陥について、検査するための自動化システムであり、該システムは以下:
ウェハ検査プレート;
該検査プレートにウェハを提供するための手段;
同じ、x、y、zおよびθ位置において、該検査プレートに提供された各々のおよび全てのウェハを整列させるためのウェハ調節デバイス;
訓練の間の複数の既知の良好な品質のウェハの視覚的入力のための、そして検査の間の他の未知の品質のウェハの視覚検査のための、視覚検査デバイス、および、
コンピュータシステムであって、複数の既知の良好な品質のウェハ上の各画素に対して、グレイスケール測定を取ることにより、良好な品質のウェハのモデルを開発するための、処理工程およびメモリ能力を有し、そこからの各画素位置に対する、平均および標準偏差を計算し、さらに他の未知の品質のウェハを該モデルと比較して比べる、コンピュータシステム、
を備えるシステム。
【0064】
(項目14)少なくとも上記ウェハの一部の画像を、カメラにより見られるように焦点化するための焦点化機構をさらに備える、項目13に記載の自動化システム。
【0065】
(項目15)上記視覚検査デバイスがカメラである、項目13に記載の自動化システム。
【0066】
(項目16)上記視覚検査デバイスがCCDカメラである、項目13に記載の自動化システム。
【0067】
(項目17)感度パラメータ、形状、ダイサイズ、ダイ形状、ダイピッチ、行の数、および列の数を含む、パラメータおよび他の制約もしくは情報を入力するためのパラメータを入力するデバイスをさらに備える、項目13に記載の自動化システム。
【0068】
(項目18)上記視覚検査デバイスにより見られる光景を、現状においてもしくは以前の保存された時間において、表示するためのディスプレイをさらに備える、項目13に記載の自動化システム。
【0069】
(項目19)上記モデルの外側にあるウェハの画素上にもしくは該画素に隣接して、マークを配置するためのマーキングヘッドをさらに備える、項目13に記載の自動化システム。
【0070】
(項目20)フレームおよびフードをさらに含み、該フレーム上で上記ウェハ検査プレート、上記ウェハ調節デバイス、上記視覚検査デバイス、および上記コンピュータシステムが装着され、そして該フードが該検査プレート上の検査領域を包囲するためにある、項目13に記載の自動化システム。
【図面の簡単な説明】
【0071】
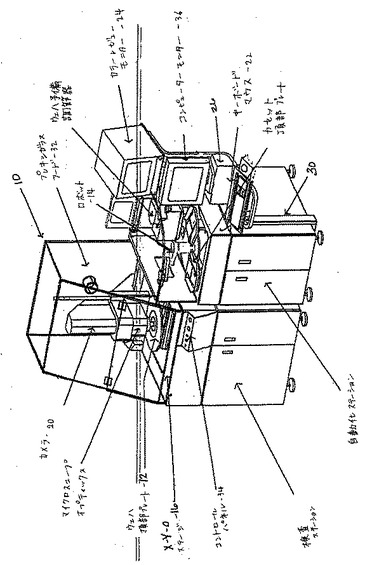
【図1】図1は、システムの1つの実施態様の斜視図である。
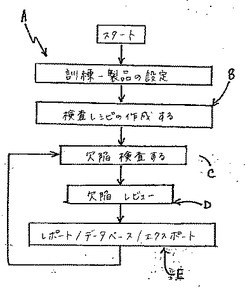
【図2】図2は、プロセスの全体のフローチャートである。
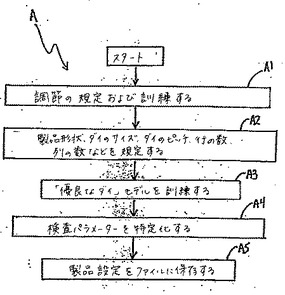
【図3】図3は、図2に示されるプロセスの1つの工程のより詳細なフローチャートである。
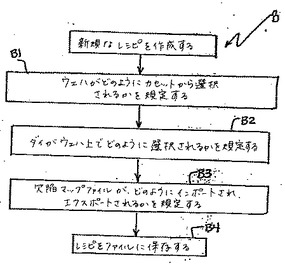
【図4】図4は、図2に示されるプロセスの1つの工程のより詳細なフローチャートである。
【図5】図5は、図2に示されるプロセスの1つの工程のより詳細なフローチャートである。
【図6】図6は、図2に示されるプロセスの1つの工程のより詳細なフローチャートである。
【図7】図7は、図2に示されるプロセスの1つの工程のより詳細なフローチャートである。
【図8】図8は、異なる角度での図1に示されるシステムと類似のシステムの全体的な斜視図である。
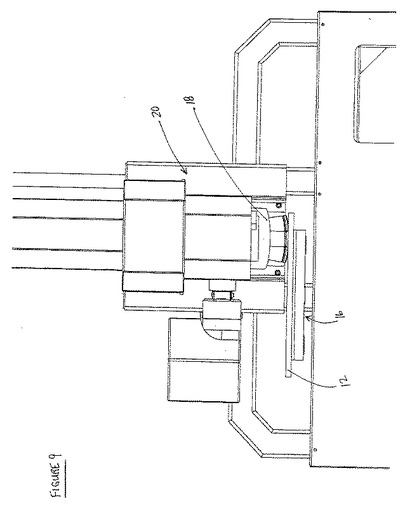
【図9】図9は、ウェハ頂部プレートおよびオプティクスの正面図である。
【図10】図10は、ウェハ頂部プレートおよびオプティクスを含む検査ステーションの一部の左正面斜視図である。
【図11】図11は、検査ステーションの頂部の右正面斜視図である。
【図12】図12は、図11に示される検査ステーションの頂部の右側面斜視図である。
【図13】図13は、オプティックスおよびウェハ頂部プレートの拡大図である。
【図14】図14は、図9のウェハ頂部プレートおよびオプティクスの側面図である。
【図15】図15は、図10〜12に示される検査ステーションの左側面斜視図である。
【図16】図16は、ウェハ頂部プレートおよびx、y、およびθ調節器(aligner)の拡大図である。
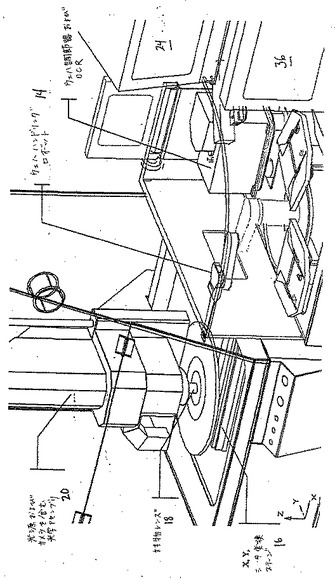
【図17】図17は、検査およびウェハハンドリングステーションの頂部分の部分斜視図である。
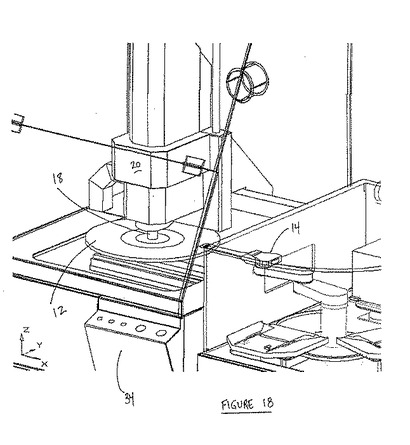
【図18】図18は、本発明のウェハハンドリングおよびウェハ頂部プレート部分の拡大図である。
【図19】図19は、ウェハハンドリングステーションの側面図である。
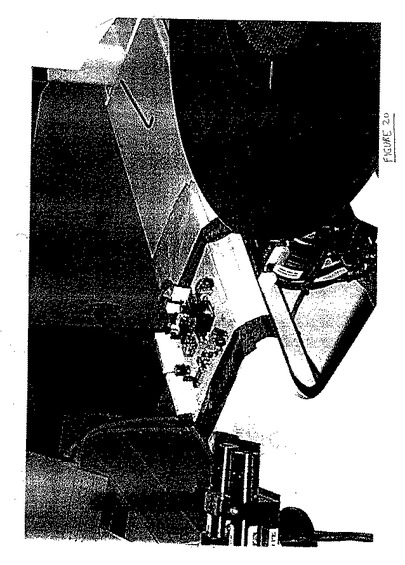
【図20】図20は、本発明の暗視野オプションの部分図である。
【図21】図21は、暗視野オプションの暗視野レーザーの拡大図である。
【発明を実施するための形態】
【0072】
(好ましい実施態様の説明)
本発明の自動化欠陥検査システムは、一般的に10で示され、これは図1および8に全体として(図2〜7および9〜21に詳細な部分で)最良で示され、1つの実施態様において、パターンウェハWのダイの欠陥を見つけるために使用され、この使用ならびに、全ウェハ、切込みウェハ、破損ウェハ、フィルムフレーム、ゲルパックのダイ、ワッフルパックのダイ、MCM、JEDECトレー、Auerボート、および他のウェハの任意の種類のウェハならびにダイパッケージ構成を検査することを含む他の使用が意図される(但し、以後、これらの使用の全てが、ウェハWの検査として一般的に示される)。このシステムは、以下を含む(これらには限定されない)多くの種類の欠陥について検査する:金属被膜欠陥(スクラッチ、ボイド、腐食、ブリッジングなど)、拡散欠陥、パシベーション層欠陥、スクライビング欠陥、ガラス絶縁欠陥、切込み由来のチップおよびクラック、プローブまたはボンド領域欠陥(例えば、プローブマークの損失、変色、金属損失およびプローブブリッジング)、拡散不良、ベーポックス(vapox)など。このシステムはまた、さらにまたは代わりに、相互接続または隆起(金またはハンダ隆起)を、欠陥またはサイズおよび形のような他の特徴について検査するために使用される。
【0073】
このシステムおよびプロセスは、一般的に図2に示されるように、システムの訓練工程(工程A)、検査レシピを作成する工程(工程B)、この訓練およびレシピに基づくダイまたはウェハを検査する工程(工程C)、所望であれば、欠陥評価(工程D)、および所望であれば、欠陥報告工程(工程E)の多工程プロセスを含む。この目的を実行するためのシステム10は、一般的に、ウェハ試験プレート12、試験プレートにウェハを提供するための14として示される手段、同じx、y、およびθ位置またはx、y、zおよびθ位置にそれぞれのウェハを整列するためのウェハ調節デバイス16(x−y−θまたはx−y−z−θ調節器(aligner))、フォーカス機構18、カメラ20または訓練の間優良なダイの視覚的入力のための、そして検査の間他の未知の品質のダイの視覚的検査のための他の視覚検査デバイス、パラメーターおよび感度パラメーター、形状、ダイのサイズ、ダイの形、ダイのピッチ、行の数、列の数などの他の制約または情報を入力するためのパラメーター入力デバイス22、現在または任意の以前の保存された期間、カメラによって見られる視界を表示するためのディスプレイ24、コンピューターシステム26または入力された優良なダイを保存し、そこからモデルを開発し、モデルとの比較において他のダイを比較し分析するためにプロセシングおよびメモリー能力を有する他のコンピューターのようなデバイス、マーキングヘッド28、フレーム30、フード32、コントロールパネル34、およびシステムパラメーターディスプレー36を備える。
【0074】
より詳細には、システム10および関連するプロセスは以下のようである。最初に図2に示され、図3により詳細に示される訓練工程(工程A)は、(1)訓練の間の使用のためにコンピューターシステム26において調節機能およびパラメータを規定する工程および/または訓練する工程(および格納する工程)(ここでこの全てが工程A1に示される)、(2)ウェハおよび/またはダイ形状、ウェハおよび/またはダイのサイズ、ダイのピッチ、行の数、列の数などを規定する工程(およびコンピュータシステムに入力する工程)および訓練および/または検査の間で使用するために、全てのこのような情報をコンピューターシステム26に格納する工程(ここで、この全てが工程A2として示される)、(3)理想のダイが観察される通常の特徴に基づいてどのように見えるかを規定するために、デバイス16によって整列され、カメラ20によって複数の既知の優良なダイを観察し、コンピュータシステム26内のモデルを形成することによって、「優良ダイ」が何を含むかについてシステムを訓練する工程(ここで、この全てが工程A3に示される)、(4)未知の品質のダイが優良と考えられる優良なダイモデルにどれだけ近くマッチしなければならないか(すなわち、正確なモデルからのどんな違いが依然として優良なダイと考えられるために許容か)をコンピューターシステム26に対して示す値である検査パラメーターを設定する工程(ここで、この全ては、工程A4に示される)、(5)この訓練モデルおよびその機能、パラメータなどをコンピューターシステム26に保存する工程(工程A5に示される)、を包含する。
【0075】
検査レシピを作成する工程(工程B)は、新規なレシピを作成する工程(以前に規定されたレシピが使用されるべき場合、Bの作成工程はスキップされる)を包含する。新規のレシピを作成する工程は、(1)ウェハWがどのようにカセットまたは他の格納容器から選択するかを規定する工程(ここで、この全ては、工程B1として示される)、(2)各ウェハWのダイが、どのように欠陥検査のために選択されるべきかを規定する工程(ここで、この全体は工程B2として示される)(しばしばダイは、逐次的なまたは類似の順番で検査されるのみであるが、他の任意の順番が規定され得る)、(3)欠陥検査マップファイルがどのように入力され、出力されるかを規定する工定(ここで、これは工程B3として示される)、および(4)このレシピを保存する工程(ここでこれは工程B4である)、を包含する。
【0076】
欠陥検査として示される、検査工程(工程C)は、(1)ウェハ同定コードを入力する工程(所望の場合)、工程C1として示される、(2)工程Bに規定されるレシピを選択する工程(ここで、この選択工程は工程C2である)、(3)製品の設定を選択する工程および入力する工程(これは工程C3である)、(4)ウェハ提供手段14を使用してウェハ試験プレート12にウェハを装填する工程(ここで、装填する工程は工程C4である)、(5)それぞれのウェハを同じx、y、およびθ位置またはx、y、z、およびθ位置に調節するためにウェハ調節デバイス16を使用し、規定されたおよび/または訓練された工程A1の調節機能およびパラメータを使用する、ウェハ試験プレート12のウェハを整列する工程(その全てが工程C5として示される)、(6)所望な場合、ウェハWのカメラ20の焦点を合わせる工程(これは工程C6として示される)、(7)第1ダイまたはその他の部分を有するカメラを整列するために、プレート12を動かすことによってカメラ20を使用してウェハWのイメージを収集する工程、シャッターを開き、カメラがイメージを観察し記録し得ることによってダイまたはその部分を観察および記録する工程、プレート12をカメラと別のダイまたはその部分と整列させるためにプレート12を動かす工程、別のダイまたはその部分を観察し記録する工程、観察されることが所望されるウェハのダイまたはその部分の全てが観察され、記録されるまで、これらの工程を繰り返す工程(この全ては工程C7として示される)、(8)工程C7の間同時に、工程A3の「優良なダイ」モデルおよび工程A4の許容性に基づいて観測される所定のダイのどこの欠陥が位置するかを決定する工程(この全ては、工程C8である)、および(9)見出される全ての欠陥を含むダイの全てのイメージの全ての収集であるウェハWの欠陥マップを作成する工程(この全ては工程C9である)、を包含する。
【0077】
あるいは、工程C7は、ウェハ上のダイ全体にわたって走査するようにプレート12を連続的に移動させることによって、カメラ20を使用してウェハWの画像を収集する工程と置換され得る。この工程によって、このウェハは、プレートの移動速度に対応する順でストロボ光により照射され、その結果、各ダイがカメラ20の下にある正確な時刻にストロボ照射される。これによって、画像の連続的な収集の際に、カメラを第一のダイと整列させるための停止と前進(go)の手順、そのダイを観察および記録する工程、プレート12を移動させて別のダイと整列させる工程、この別のダイを観察および記録する工程、ならびにこれらの工程を、ウェハ上のすべてのダイが観察および記録されるまで繰り返す工程などの必要がなくなる。
【0078】
欠陥の評価Dが、所望ならば、そして所望されるときには、(これは一般に、所与のウェハW上の欠陥検査の終了の際である。なぜならこの時点で、その欠陥の分類がしばしば所望されるためである。)以下の工程を包含する:(1)工程C9において作成された欠陥マップを、ロードする工程(この再ロード工程を工程D1と称す)、(2)評価するための欠陥を選択する工程(あるいは、ウェハ上の全ての欠陥を順に評価する工程)(工程D2とする)、(3)プレート12を移動させ、これによって、ウェハWを、表面に欠陥を有する特定のダイがカメラ26の下の適切な位置となるように、位置決めする工程(これらは全て、工程D3である)、(4)ユーザーがその欠陥を観察および分類して、システム10のユーザーが、観察された欠陥を観察および分類する、工程(これらは全て、工程D4である)、(5)ユーザーが評価を所望する全ての欠陥が評価および分類されるまで、工程D2〜D4を繰り返す工程(工程D5とする)、ならびに(6)分類された欠陥マップを保存する工程(工程D6とする)、ならびに、代替または追加として、欠陥情報を、他の多数のデータベース用形式のうちの任意の形式で保存する工程、もしくは他の管理および評価。
【0079】
欠陥報告工程Eは、所望ならば、そして所望されるときには、工程D6においてデータベース形式に保存されたデータを、出力またはプリントアウトする工程を包含する。次いで、このデータは、分析されるかまたは他の様式で使用され、欠陥のタイプ、欠陥の頻度、欠陥の位置などに関して、統計的もしくは他の分析を実施し得る。この分析は、ウェハWの製造業者が、欠陥を有する領域に焦点を当てることを可能とするために、それら製造業者に有用である。
【0080】
上述の工程および副工程は、本発明のシステムおよびプロセスの、基本的な説明である。以下の記載は、様々な部品およびシステム、ならびにこれらが実行する工程の詳細の、さらに詳細な説明である。
【0081】
ウェハ試験プレート12は、回転ステージであり、これは、真空を用いる万能界面プラットフォームを備え、これらは全て、ウェハとダイパッケージとの固定に、フレキシブルな界面を提供する。ウェハ試験プレートは、全ウェハ、フィルムフレーム上の切込みウェハ、ゲルパック(gel pak)中のダイ、ワッフルパック(waffle−pak)内のダイ、MCM、JEDECトレイ、Auerボート、ならびにウェハとダイのパッケージの他の配置および構成を、迅速に設置および検査するように、規定される。
【0082】
ウェハを試験プレートに提供するための手段(14と称す)は、手動(これにおいては、ユーザーがそのウェハをカセットまたはマガジンから試験プレート12へと移動させる)であるか、あるいは図面の実施態様に示すように、自動であるかの、いずれかであり得る。自動の実施態様においては、ウェハ提供手段14は、ロボットアームを有し、このアームは、第一位置(ここで、ウェハWがマガジンまたはカセットから最初につかまれる)から第二位置(ここで、ウェハWが検査のためにウェハ試験プレート12上に位置決めされる)へと旋回する。検査の後に、このロボットアームは旋回して、ウェハWを試験プレート12における第二位置から第一位置へと戻し、ここでウェハWは、そのマガジンまたはカセットの内部または上に戻されて置かれる。
【0083】
ロボットアームは、図示の実施態様において、2つのセクションを有する2パートアームであり、第一のセクションは、中心支持点の周囲を旋回し、そして第二のセクションは、第一のセクションの端部の周囲を旋回する。1つの実施態様では、このロボットアームの周囲を、少なくとも1つのカセット受容器(図1においては2つ)、任意でウェハ予備調節器、および検査ステーションが囲み、これら受容器は、内部に複数のウェハが積み重ねられる標準的なウェハ移送カセットであり、ウェハ予備調節器は、ウェハの予備調節または粗調節を提供し、そして検査ステーションは、ウェハ頂部プレート12、x−y−θ調節器16、光学部品18、カメラ20などを備える。
【0084】
それぞれのウェハ全てを同一のx、y、z、およびθ位置で調節するための、ウェハ調節デバイス16は、回転モータ、ボールねじ、直接もしくはベルトで駆動されるモータ、ウォームギアもしくは他のギア、アクチュエータ、液圧装置、プッシュロッド、真空、あるいはこの回転ステージを、真っ直ぐにまたは角度をつけて正確な所望の位置に移動させるための、他の機械的もしくは電気的な機器の、精密なシステムである。
【0085】
検査中に使用されるものと同じ調節機構およびプロセスが、訓練中に使用される。図示の実施態様においては特に、ウェハ調節デバイスは、2−D x,yおよびθ調節プロセスであり、これは必要に応じて、z高さ制御と組み合わせられる。特に、1つの実施態様においては、それは2−D xおよびyの粗い調節(続いて精密なシータ(θ)調節)のプロセスであり、これらは全て、焦点マッピングプロセス(先に生成した高さまたは焦点のマップを使用する)(このプロセスは、高さすなわちzを決定するため、従ってウェハに焦点が合っていることを確認するためになされる)と組み合わせられ、その前になされる。基本的には、粗い調節は、ウェハのほぼ中心に位置するパターンを使用する。このパターンは、その上のxおよびyの位置を知るよう、および予測するよう訓練されており、これによって、このパターンと、ウェハのxとy(2−D直線)との配向が、少なくともそれを粗く調節するようなものであることが分かる。この配向は、ステージ12を使用して実施される。その後に、精密な調節が、ウェハの周囲の近くのパターンを使用して実施される。このパターンは、θ(回転)調節の補正が得られたことを知るよう訓練されている。この調節もまた、ステージ12を使用して実施される。両方の場合において、カメラがそのパターンを見出し、そして調節機構が、ウェハが調節されるまでウェハを移動させる。
【0086】
焦点のマッピングまたはz配向が、カメラおよび/またはカメラアーム距離を調節し、次いで下記のように焦点を合わせることによって、ならびに/あるいは対物レンズ(objective)を変えることにより、ならびに/あるいはカメラの焦点を合わせることにより、実施される。実施される調節は、ウェハの高さマップに基づく。この高さマップから、ウェハの予備プログラムされた点を使用して、焦点が規定される。
【0087】
焦点機構18は、光学画像化機構であり、異なる検査解析のための多数の光学部品を、内部に備える。モータ付きの顕微鏡タレットによって、画像化光学部品を、多数の選択肢から選択することが可能となる。例えば、多数の光学部品(例えば、3つまたは5つの光学部品)が供給され得、そして典型的な選択肢には、1.25倍、2.5倍、5倍、10倍、20倍、50倍、および100倍の対物レンズが挙げられるが、他の任意の対物レンズが考慮される。モータ付き顕微鏡タレットおよび別個の対物レンズは、光学的拡大の選択手段を提供する。
【0088】
カメラシステム20または他の視覚的検査デバイスは、訓練中の良好なダイの視覚的入力のため、および検査中の他の未知の品質のダイの視覚的検査のためのものである。このカメラシステムは、高解像度の検査が可能な任意のタイプのカメラであり得る。このようなカメラシステムの1部分の例は、3−CCD検査カメラであり、これは、欠陥分析中に、ダイまたは他の画像を捕捉するために使用される。
【0089】
本発明により考慮されるカメラシステム20の1つの例は、2カメラシステムであり、ここで、一方のカメラは検査カメラであり、そして他方のカメラは観察用カメラである。この検査カメラは、高解像度CCDカメラであり、これは、検査のために高解像度のグレースケール画像を提供する。観察用カメラは、例えば、758×582画素解像度、あるいは1008×1018画素解像度、あるいは他の既知の画素サイズで欠陥を見つける際の視覚的評価のための、高忠実度カラー画像カメラである。さらに、カメラを観察することによって、高品質のカラー画像が、オペレータが欠陥を評価するために、提供される。
【0090】
コンピュータ制御される光学部品は、欠陥の正確な検出のために要求される、歪みの低い画像を提供するために、作動距離の長い顕微鏡対物レンズを使用することを条件とする。多数の倍率が、下記のようにユーザーにより規定される検査レシピに基づいて、自動的に選択され得る。
【0091】
コンピュータ制御される照射は、検査カメラおよび光学部品の内部に、それらと共に一体化され、これによって、ウェハ画像化プロセスを完了する。あるいは、照射システムは、この照射システムがそのカメラと共に作動している限り、カメラおよび光学部品に取り付けられ得る。本明細書中に記載のような、ストロボ照射の環境においては、照射が、カメラのシャッター(これは、1つの実施態様においては、高速電子シャッター機構である)と同時にまたは実質的に同時に、起こらなければならない;あるいは、ストロボ照射しない環境においては、照射は典型的に、連続的であるか、または必要に応じてである。
【0092】
照射は、例えば、高強度光、レーザ、蛍光灯、アーク放電ランプ、白熱電球などの、任意の公知の照射手段により得る。照射角度は、明視野のみ、暗視野のみ、または明視野および暗視野の変動の両方のものであり得る。
【0093】
明視野照射は、基板を上から照射する工程を包含し、ここで、この照射システムは典型的に、この基板の真上に搭載されたカメラに隣接するか、またはこのカメラの一部である。この照射は、図1に示すように、基板に対して約90°程度の配向である。図示の実施態様においては、明視野照射器はカメラに隣接し、そしてこのカメラに調和して機能する。この明視野照射は、基板上の平坦なまたは比較的平坦な物体を照射する際に、非常に効果的である。なぜなら、この光は一般に反射されて、カメラに戻るためである。対照的に、基板上の3−d物体は、光を角度を付けて反射し、その光をカメラから離れた角度にさせる。その結果として、平坦な物体はカメラに明るく現れるが、一方で3−d物体は暗く現れる。
【0094】
暗視野照射は、しばしば、明視野と共に使用されて、3−d物体を「明るくする」か、あるいは、3−d物体を単に明るく見るためのみのために、使用される。暗視野光は、ウェハ頂部プレート12に対して低い角度で提供される。暗視野照射は、暗視野光が基板上の3−d物体に低い角度で導入される場合には基板に対してほぼ90°の角度で光をカメラまで反射するが、物体が平坦な場合には光の導入に対向する周辺に沿った低い角度で光を反射する、という点で、明視野とは逆に作用する。したがって、暗視野光は、3−d物体を明るく照射するが、平坦な物体はさほど照射しない。
【0095】
暗視野オプションを備えるシステム10は、図20〜21に最もよく示されるように、周辺の周りに間隔を空けて配置された複数の照射器を含む。1つの実施例においては、4つの照射器が使用され、そして各々が、90°の分離で互いから等しく間隔を空けている。別の実施例(1対が図示されている、図20〜21)においては、8つの照射器が45°の分離で使用され、そしてこれらに関して図面に示される代替物においては、照射器は90°の分離で対になってまとまっており、所与の角度で2倍の照射能を有する。
【0096】
システムが明視野および暗視野の両方の照射を備える場合には、ユーザーは、一方または他方あるいは両方を使用する選択肢を有する。このことは、重大な選択肢を提供する。例えば、上に平坦な物体のみを有する傾向があるダイについて検査が実施される場合には、明視野はこれらの物体を良好に照射し、このタイプの検査に非常に十分である。あるいは、3−d物体を有する傾向のあるダイについて検査が実施される場合には、暗視野で十分であり得る。しかし、多くの場合(例えば、一般には非常に平坦であるが非常に粗く、そこから突出する3−dの塊を含む傾向のある、金隆起を有するもの)において、これら2つの組合せがしばしば有利である。この実施例においては、明視野照射は、このようなスクラッチなどの任意の欠陥の存在および隆起の存在を示し、一方暗視野照射は、隆起上の塊および粗い表面を示す。暗視野がなければ、この隆起は暗い画像として映える。一旦、暗視野が導入されると、塊が、隆起上の白色スポットとして位置を確認される。
【0097】
暗視野はまた、欠陥の分類を補佐する。なぜなら、明視野光は、表面から突き出た粒子または欠陥と、その表面に埋没またはスクラッチされたものとを、区別しないためである。暗視野照射は、これらの突き出た欠陥と埋没した欠陥とを区別する。
【0098】
1つの実施態様においては、システム10は、明視野照射システムを含み、このシステムは、カメラに隣接して物理的に配置されるかまたはカメラに物理的に組み込まれ、これによって照射される物体の上から明視野照射を提供する。別の実施態様においては、システム10は暗視野照射システムを含み、このシステムは、ウェハ頂部プレート12の周囲の周りに、頂部プレートとは異なる低い角度(例えば、1°〜10°の角度)で配置される。なおさらなる実施態様においては、物体の上からの明視野照射と、物体の周囲の周りからの暗視野照射との両方が、備えられる。上で示したように、明視野および暗視野の照射システムにより提供されるような照射は、白色光源(例えば、白熱光、蛍光、または他の類似の気体封入型もしくは類似の電気の光)のような任意の公知の照射源により、あるいはレーザまたは類似のデバイスにより、提供され得る。
【0099】
パラメータ入力デバイス22は、パラメータおよび他の制約もしくは情報を入力するためのものである。これらのパラメータ、制約および情報には、感度パラメータ、形状、ダイのサイズ、ダイの形、ダイのピッチ、行の数、列の数などが挙げられる。任意の形態の入力デバイス(キーボード、マウス、スキャナ、赤外またはラジオ波の送信器および受容器などが挙げられる)が十分であることが考慮される。
【0100】
ディスプレイ24は、その時点または任意の以前の保存された期間にカメラによって見られる視界を、表示するためのものである。このディスプレイは、好ましくは、カラーモニタであるか、またはユーザーの視界、もしくはメモリに保存された画像を観察するためにカメラ20によって観察される画像のカラー表示フォーマットを表示するための他のデバイスである。このモニタ、または別の隣接もしくは他のモニタを使用して、システム10により使用されているカメラ20のグレースケール検査画像を観察し得る。このディスプレイ24は、検査の間に、カメラ20によって観察される画像を示すために、使用される。さらに、システムパラメータディスプレイ36がまた、ユーザーが所望するならば、システムパラメータのような他の情報を表示すために、利用可能である。
【0101】
コンピュータシステム26、または処理およびメモリ容量を有する他のコンピュータは、入力された良好なダイを保存するため、そのダイからモデルを生じさせるため、ならびに欠陥フィルタリングおよび感度パラメータに基づいて、欠陥が存在するかどうかを決定するために、そのモデルに対して他のダイを比較または分析するためのものである。コンピュータシステム26はまた、他の全ての数学的および統計的機能、ならびに全ての操作を実行するために、使用される。1つの実施態様においては、コンピュータシステム26は、平行処理DSP環境のものである。
【0102】
マーキングヘッド28は、欠陥のあるもののような特定のダイをマークするために、提供される。1つの実施態様においては、このマーキングヘッドは、ダイインク付け機構である。これが使用されて、それによって、それぞれのダイが検査後にインクを付けられ得るか、または欠陥のある全てのダイがインクを付けられ得るか、あるいは欠陥のある全てのダイが、評価および/もしくは分類の後にインクを付けられ得るか、などである。インク付けはまた、「強制的なインク付け」の様式においても使用され得、これによって、予備特定されたダイ(ウェハの縁部にある全てのダイなど)が、電気的検査または視覚的検査にかかわらず、インクを付けられる。
【0103】
エアナイフが、必要に応じて、ウェハを検査前にクリーニングするために提供される。このエアナイフは、基本的には、それを通って空気が注入され得る、何らかの設計の導管であり、ここでこの導管は、1つ以上のオリフィスまたはアウトレットを備える。この空気は、その導管上に選択的かつウェハに関して配置されたオリフィスから放出されて、評価の前に、ウェハから埃および他の粒子を吹き飛ばす。これによって、誤った欠陥の決定が排除される。
【0104】
これらのシステムおよび部品は、システム10の一部であり、そして欠陥検査の実施のために使用される。この欠陥検査は、上に簡単に記載されるが、ここで以下に詳細に記載する。
【0105】
訓練工程Aの全体を、以下にさらに詳細に記載する。
【0106】
工程A1は、訓練中に使用するためのコンピュータシステム26における調節特性およびパラメータを決定および/または訓練(ならびにコンピュータシステムに保存)する工程を規定する。この調節技術は、工程A3およびC5において以下に記載のように実施されて良好なダイを決定し、検査する場合には、2つの機能プロセスである。すなわち、物理的調節および画像調節である。この時点で、どのパラメータがこれら物理的および画像調節の間に使用されるべきかを規定する。これらのパラメータには、規定マーカー(例えば、物理的調節中に必要とされるもの)、ならびに別個の要素およびバッファ(例えば、画像調節中に必要とされるもの)が挙げられる。実際の物理的および画像調節工程は、以下に記載のように、工程A3およびC5の最中に起こる。
【0107】
工程A2は、ウェハおよび/またはダイの形状、ウェハおよび/またはダイのサイズ、ダイのピッチ、行の数、列の数などを規定(およびコンピュータシステムに入力)する工程、ならびにこのような情報すべてを、訓練および/または検査の間に使用するために、コンピュータシステム26に保存する工程である。
【0108】
工程A3は、システムを、「良好なダイ」が何を含むかに関して訓練する工程であって、デバイス16を介して複数の既知の良好なダイを調節する工程、およびカメラ20を介してそれらのダイを観察する工程、ならびにコンピュータシステム26中にモデルを形成して、観察された共通の特性、要素、範囲などに基づいて、理想的なダイがどのように見えるべきかを決定する工程による。良好なダイは、プロセスによる変動を有することが大いにあり得、そして実際にあり得るものを除き、欠陥を有さないダイとして定義される;しかし、これら全てのプロセスによる変動は、欠陥ではなく、むしろ受容可能な変動であるとみなされてきた。好ましくは、受容可能なランダムな逸脱の完全スペクトルの全体が、訓練中にこのシステムに示される、典型的には20、30、または100までの良好なダイのセットのこの訓練により、供給されるが、最小も最大も必要とされない。しかし、プールが大きくなるにつれて、結果はより正確になる。なぜなら、より良好な、より様々なモデルが作成されるためである。したがって、色のドリフトおよびコントラストのシフト、ならびに他の多数の逸脱は、この訓練セットの一部である。基本的には、システム10は、ユーザーが提供する既知の良好なダイのセットを研究することによって、ダイの検査を実施する。
【0109】
調節は、物理的調節または画像調節のいずれか、あるいはその両方を含み得る。物理的調節は、基本的に、特定の位置マーカーを、各ウェハ、ダイ、またはダイのサブセクション(これは、そのウェハおよびダイが位置決めされそして調節される起点となる位置決めポイントとして使用される)の、上または周囲に入力する工程を包含する。工程A1において、これらのマーカーが規定された。
【0110】
物理的調節は、ウェハ調節デバイス16を介して、それぞれの全てのウェハ、ダイなどを、同一のx、y、およびθ位置に、これらの位置決めマーカーを探し、調節することによって、調節する、ウェハ試験プレート12を含む。使用において、このシステムは、これらのウェハ、ダイまたはそのサブセクションの全体の写真または画像を撮像し、そして特定の位置決めマーカーを探す。このシステムは、マーカーを見出すために、ハンティング法(hunting method)を使用する。一旦、1つ以上の特定の位置決めマーカーが同定され、そしてこのマーカーが予測とは他のいずれかの位置または配向にあることが見出されると、ウェハ試験プレート12が、並進または回転の様式で、x、y、およびθ方向に、このウェハ、ダイまたはサブセクションをスピンさせるか、ターンさせるか、調節するかまたはその他の様式で動かす。
【0111】
このシステムはまた、画像調節を実施し得る。工程A1の間に、別個の要素およびバッファが、画像調節において必要であるとして、規定された。
【0112】
この画像調節はまた、ソフトウェア調節とも呼ばれ得る。なぜなら、ウェハまたはダイを物理的に移動させるよりむしろ、ソフトウェアが実際に、撮像された画像を調節することによって、この調節を実施するためである。この画像調節は、各ダイのようなウェハの各セクション上で、良好なダイのモデリングおよび未知の品質のダイの検査のうちの一方または両方の最中に、実施される。このことは、しばしば必要である。なぜなら、撮像された各画像が、隣接する画像または別のウェハ上の共通する位置と比較として、わずかにずれ得るためである。画像配置の実際のプロセスは、基本的に、撮像された特定の位置の全ての画像が調節されていることを確実にする。すなわち、重ねた場合に、これらの画像の特徴が、オフセットまたはねじれを有するよりむしろ整列し、その結果、欠陥のみが目立つ。
【0113】
画像調節は、工程A3および/またはC5において必要とされて実施される場合には、画像をターンまたは移動させて「一致」させる(square up)ための起点となるダイ上の別個の要素を、カメラが探す工程を包含する。この別個の要素は、一般に、その欠陥が問題とならないほど十分に大きい要素である。この要素はまた、別個の形を有さなければならない。この別個の要素が、そこにあると予測された位置にある場合には、その画像がラインアップされ、そして画像調節は必要ではない;しかし、そうでない場合には、別個の要素が見出され、そして画像が調節されなければならない。
【0114】
画像調節における別個の要素のハンティングは、ダイ全体において実施され得る。しかし、これは高価であり、時間を浪費する。その結果として、手際のよい調節が代替的に実施され得る。
【0115】
手際のよい調節の場合には、バッファが画像内に規定される。このバッファは「小刻みに動かすこと(wiggle)」、すなわち画像の移動またはねじりが可能である。このバッファは典型的に、予測される移動のx量およびy量である。次いで、このバッファを使用して、別個の要素について検索されるべき別個の要素の予測された位置の周囲の領域を規定する。一旦、別個の要素が見出されると、その別個の要素が予測された別個の要素の位置から離れたxおよびyの距離は、画像を調節するためにその全画像が移動された、xおよびy方向の距離である。
【0116】
観察する工程は、ウェハW(既知の良好なウェハ)の画像を、カメラ20を使用して、プレート12を移動させてこのカメラを第一の画像(これは、全ウェハ、ウェハの一部、ダイ、またはダイの一部であり得る)と整列させることによって、収集する工程、ならびに次いでその画像を観察および記録する工程を包含する。その後、プレート12を移動させてカメラを別の画像と整列させる工程、この別の画像を観察および記録する工程、ならびにこれらの工程を、ウェハ上の全ての画像が観察および記録されるまで繰り返す工程が含まれる。代替の工程C8は、以下に記載のように、連続的な移動およびストロボ照射を包含する。それぞれの場合において、次いでこれは、複数の既知の良好なダイまたはウェハについて繰り返される。なぜなら、ウェハのプールを観察することが、良好なダイのモデルの形成のために必要であるためである。
【0117】
実際の欠陥検査のアルゴリズムは、「良好なダイ」のセットの画像の収集物から算出される。画像(単数または複数)が、良好なダイのセットのうちのそれぞれの良好なダイについて、撮像される。各画像は、画素(例えば、約1000×1000のアレイまたはグリッドの画素であるが、任意の数が使用され得る)から構成される。良好なダイの画像の全てにおける、各同一の画素に関して、すなわち、各共通のx,y座標(これは、画素である)に関して、平均および標準偏差が画素値において算出され、これは、この所与の画素のグレースケール値である。したがって、30の良好なダイのグループ化において、上述の実施例として使用されるように、各ダイが1000×1000のスポット(それぞれが画素と称される)(全部で百万のスポット)のアレイである場合には、1000×1000までの全ての、1×1、1×2、1×3などのx,y座標における各画素のグレースケールの数の、平均および標準偏差が、算出される;すなわち、平均および標準偏差が、画素1×1については30個全てのダイにおける画素1×1に対するグレースケール測定を使用して、などで、百万個のダイのそれぞれに関して算出される。
【0118】
1つの実施態様においては、各画素に対するグレースケールの数を使用して、平均および標準偏差を算出し、そしてこれらは一定の範囲内にある。1つの例は、256スケールスキームであり、ここでは、この256スケールスキームにおける0などの一端が、暗いかまたは黒色であるかあるいは影の付いた画像を表し、そして同一の256スケールスキームにおける255のような他端が、白色または影の付いた画像を表す。
【0119】
あるタイプのダイについて、全ての手段の集合体(全ての画素について)は、事実上、そのタイプの完全なダイであり、そして良好なダイモデルを本質的に規定する。あるタイプのダイについて全ての標準偏差の集合体は、感度およびフィルタリングについて以下に記載のように調節されたものとして、事実上、受容可能な範囲であり、その内側では、そのダイが良好であるとみなされ、そしてその外側では、そのダイに欠陥がある疑いがある。
【0120】
工程A4は、検査パラメータを設定する工程であり、これらのパラメータは、未知の品質のダイが良好なダイであると考えられるために良好なダイモデルにいかに近く一致しなければならないか(すなわち、正確なモデルからのどれだけの差異が、依然として良好なダイと考えれるために許容可能であるか)を、コンピュータシステム26に示す値である。このような検査パラメータのいくつかは、欠陥感度、最小欠陥コントラストおよび欠陥フィルタリングである。
【0121】
図示の実施態様においては、欠陥解像度は、光学的拡大に依存する。より高い拡大を選択すると、結果として、画像の視野がより小さくなる。選択される拡大により、複数の画像が単一のダイの検査のために必要とされるか、または多数の画像が、単一の画像に適し得る結果となり得る。ダイのサイズおよび光学的拡大は、工程A2において入力される。しかし、より小さな欠陥解像度は、結果として、1つのダイ当たりより多くの画像化をもたらし、したがって同じ品質のダイの欠陥検査のためにさらに時間がかかることが、留意される。あるいは、解像度が調節可能であるカメラが与えられ得、これによって、この調節特徴が、画像のサイズよりむしろ感度を制御する。
【0122】
欠陥感度には、上に記載のように既知の良好なダイモデルを規定するために算出される、平均および標準偏差の、ユーザーに規定される倍率が関与する。欠陥感度は、工程C7において、以下にさらに詳細に記載する。
【0123】
最小欠陥コントラストには、平均および標準偏差から規定される上限および下限における、ユーザーに規定される絶対的限定が関与する。最小欠陥感度もまた、工程C7において、以下にさらに詳細に記載する。
【0124】
欠陥フィルタリングには、統計的またはデータフィルタリングが関与し、面積、サイズ、問題の領域および/またはクラスター化フィルタリング、ならびに接続および/または減少因子フィルタリングが挙げられる。このフィルタリングによって、ユーザーは、十分なサイズまたは形の、あるいは他の点で受容可能であり、したがって欠陥としてラベルを付けられないことが所望される、重要な領域内のもの以外の、欠陥であることがわかった項目を、フィルタ除去し得る。図示の実施態様においては、欠陥フィルタリングは、各検査レシピまたはラウンドについて提供される。これによって、システムの性能が、ユーザーの応用のために最適化され得る。この欠陥フィルタリング特徴は、形、サイズ、x−y座標などのような欠陥の位置および形状の情報を使用して、その欠陥がオペレータによるさらなる評価および分類を必要とするかどうかを自動的に決定する。1つの例は、以下の通りである:特定のサイズより大きな任意の欠陥は、さらなる評価に供されない欠陥であると、ポジティブに決定され得る。さらにまたは代替的に、特定のサイズより小さな任意の欠陥は、「良好なダイ」モデルの範囲外にあったとしても、欠陥ではないとしてフィルタ除去される。また、工程D4の評価工程において、その間においてはオペレータの評価が必要とされる領域が、存在し得る。同様に、「良好なダイ」モデルからは異常な形、位置、構成、配置などがフィルタされ得る。欠陥フィルタリングは、以下にさらに規定する。
【0125】
工程A5は、この訓練モデルおよびその特徴、パラメータなどを、コンピュータシステム26に保存する工程である。
【0126】
全体的な検査レシピを作成する工程Bは、検査されるべき品目(すなわち、ウェハ、ダイなど)の各々のタイプに対する、検査レシピを作成する工程および保存する工程を包含する。莫大な数の検査レシピが、作り出され得、コピーされ得、そして編集され得、これによってユーザーは、検査プロセスをカスタマイズし得る。
【0127】
工程B1は、ウェハWがカセットまたは他の格納容器から選択される方法を規定する。工程B2は、欠陥検出のために各ウェハにおけるダイが選択される方法を規定する。工程B3は、欠陥検出マップファイルが入力され、そして出力される方法を規定する。工程B4は、このレシピを保存する。
【0128】
全体の検査工程Cは、欠陥検査と呼ばれ、半導体ウェハ検査のための高度な独自のデジタル画像解析技術である。このシステムは、工程A3において、上記するようにユーザー供給のセットの既知の良好なダイをまず調べた後に、ウェハ検査を実行する。この学習および検査する方法は、伝統的なテンプレートまたはモデル適合検査より強力である。既知の良好なダイにおけるランダム変化さえ、受容可能と決定され得ることは注目すべきであり、これは伝統的なテンプレートまたはモデル適合の場合にはあてはまらない。要するに、ウェハ検査へのこの確固たるアプローチは、疲労および他の問題なしに人間のオペレータに類似して機能する。
【0129】
工程C1は、所望であればウェハ識別コードを入力する。これは、各ウェハを後の欠陥の評価などのために識別するための方法を提供するため、ウェハマッピングが生じる場所が要求される。このウェハ識別コードは、英数字文字、バーコード、2−Dマトリックスコードなどの任意の公知の識別システムであり得る。
【0130】
工程C2は、工程Bで規定されたレシピを選択する。工程C3は、所望されるものであれば製品設定を選択する。
【0131】
工程C4は、ウェハをウェハ試験プレート12上に、ウェハ提供手段14を使用して装填する。このウェハ試験プレート上への装填は、マニュアル装填または、ウェハがその上のダイとともにカセットまたはマガジンから検査領域へ自動的に移送される自動システムの使用、であり得る。この自動システムは、全てのマニュアル操作の除去を可能にする。
【0132】
工程C5は、各および全てのウェハを同じx、y、zおよびθ位置に調節するために、ウェハ試験プレート12上のウェハを、ウェハ調節デバイス16を使用して調節し、そして工程A1で規定されたおよび/または訓練された調節機能およびパラメータを使用して調節する。これは上記に詳細が記載された。なぜなら、既知の良好なウェハを調節して良好なダイモデルを形成するために使用されたように、同様の物理的調節および画像調節のプロセスが、ここで使用されるためである。
【0133】
もしまだ焦点が合わされてなければ、カメラ20の焦点をウェハW上に合わせることが、しばしば必要である。これは、工程C5の間または工程C5の後に、必要であれば生じ、そして高さマップに規定されるウェハのz方向である。
【0134】
工程C6は、ウェハWの画像を、カメラを全ウェハ、ウェハの一部、ダイ、またはダイの一部であり得る第一画像と整列させるようにプレート12を動かして、カメラ20を使用して収集し、そしてその画像を観察し、記録し、そしてその後、プレート12を動かしてカメラを他の像と整列させ、この他の画像を観察して記録し、そしてこれらの工程をウェハ上の全ての画像が観察されて記録されるまで繰り返す。代替の工程C6は、以下に記載のように連続的な運動およびストロボ照射を含む。
【0135】
工程C7は、工程C6と同時的であり、工程A3の「良好なダイ」モデル、および工程A4の許容度およびパラメータに基づいて、観察される所与のダイ上の欠陥が位置する場所を決定する工程を含む。基本的に、未知の品質のウェハ上の各画素が観察され、それにより欠陥感度およびフィルタリングが「良好なダイ」モデルとともに使用されて、画素および/または任意のグループの画素が「良好」または疑わしいか決定する。
【0136】
初期的に異常または「良好なダイ」モデルと画像との間の差は、発見されそして次いで感知されフィルタされる。この決定を単純化するために、上部レベル値および下部レベル値が、各ダイ上の各画素のために、平均および標準偏差計算ならびにユーザー規定した感度および絶対限度に基づいて決定される。観察された画像は次いで、接続ファクタリング、減少もしくはノイズ削減ファクタリング、ならびに面積、サイズ、対象の領域などのしみ部(blob)識別に関する統計的またはデータフィルタリング、および/または相互作用性フィルタリングを含む1つ以上の種類のフィルタ技術を使用してフィルタされる。フィルタリングの後、疑わしい欠陥領域が確認される。基本的には、欠陥感度および最小欠陥対比が使用されて、一旦感度が考慮に入れられると、平均のいずれかの側の実際の調整された標準偏差である上部レベル値および低部レベル値を規定する。その後、フィルタリングは、しばしばより良く真の欠陥を識別するために使用される。
【0137】
1つの実施形態において、欠陥感度は、基本的にはユーザー規定した複数の標準偏差である。良好なダイおよび粗悪なダイの実際の分析を通して、ユーザーは最も正確に全ての欠陥を規定するが良好なダイを欠陥として間違って規定することがない、複数の標準偏差を規定する。例は次のとおりである。98、100および102のグレースケール値を有する3つの既知の良好なダイを仮定する。この平均は100であり、そして標準偏差は+/−2である。ユーザーは検査情報を介して、欠陥感度を5に規定する。この上限および下限はそれぞれ、次いで110および90であり得る。
【0138】
1つの実施形態において、この最小欠陥対比は、ユーザー規定の絶対限度に類似する。上記例において、情報を介したユーザーは、15の最小対比を有するグレイスケール測定は欠陥ではないことに気づく。この最小欠陥対比は、従って15に設定されそしてその結果、かわりに上限および下限は115および85にされなければならない。
【0139】
好ましい実施形態において、未知の品質のウェハまたはダイの各画素が観察された後、検査画像は、簡単な画像減算を使用して作製される。検査画像は、基本的に検査画素のグレイスケール測定値(例えばその画素に対して98)を、例えば110である良好なダイ上限から減算し、または例えば90である良好なダイ下限を、再び98である、検査画素のグレイスケール測定値から減算し、2値の良好または不良表示を得ることにより作製される。この上限および下限は好ましくは感知(sensitized)される。もしこの数が正であれば、この範囲内であるとして黒(あるいは白)に色づけされ、そしてもしこの数が負であれば、この範囲の外であるとして白(あるいは黒)に色づけされる。2値の白黒画像が得られる。この画像は、その簡単さのために、実際の256カラー画像を保存することと比較してよりいっそう迅速な速度でフィルタリングすることを可能とする。あるいは、256色などのフルカラー画像が、充分なメモリが利用可能であり、そして最適速度が重要ではない場合、使用され得る。
【0140】
1つの実施形態において、1つ以上の続くフィルタが2値の白黒画像上に使用される。接続ファクタリングおよび減少ファクタリングなどの画像処理機能が次いで個別にまたは一度に使用され得る。しみ部識別に関する統計的フィルタリングまたはデータフィルタリングもまた、個別にまたは一度に実行され得る。
【0141】
接続ファクタリングは、「閉」操作を含む。この識別された画素、上記の例では白色のものは、拡張されそして次いで衰退され(eroded)、または二倍に拡張され次いで衰退され、あるいは任意のほかの公知の組み合わせである。これは、小さい欠陥または受容可能な凹凸を除去する(filter out)ために、欠陥を接続しまたは充填する。
【0142】
減少ファクタリングは、「開」操作含む。この識別された画素は衰退されそして次いで拡張され、または二重衰退され、そして次いで二重拡張され、あるいは任意の他の公知の組合わせである。これはノイズを減少させる。
【0143】
しみ部分析は、2値の白黒画像のしみ部を識別する工程を含む。一旦認識されると、例えば、xサイズおよびyサイズなどのサイズ、位置、領域などを含む、様々な各々のパラメータが識別される。統計的フィルタリングまたはデータフィルタリングは、次いでこのしみ部のパラメータ上で実行される。
【0144】
このような統計的またはデータフィルタリングは、領域フィルタリング、サイズフィルタリング、対象の領域フィルタリング、および相互作用性欠陥分類フィルタリングを含む。領域フィルタリングは、所定の領域またはそれより小さいしみ部を捨てる。サイズフィルタリングは、所定のxまたはyサイズまたはそれより小さいしみ部を捨てる。対象の領域フィルタリングは、ユーザーがあまり重要ではない、または何ら重要ではないダイ上の位置を規定することを可能とし、そしてそのようにすることにより、任意のその上の欠陥を無関係とする。最後に、相互作用性の欠陥分類は、近接(ここで近接を規定する距離はユーザー規定である)するが接触していない識別される画素のクラスタ形成を含む。
【0145】
基本的には、未知の品質のダイが画像を観察し、そして各画素を上限値および下限値を介して、その平均および標準偏差と比較することにより検査される。感度およびフィルタリングもまた、ユーザーにより多かれ少なかれ重要とされるファクターに対する補償を可能にする。つまり、未知の品質のダイにおける所与の観察される画素の任意の1つが、感知されてフィルタされるとき上限値および下限値の外側にある場合、このダイは欠陥性であり、そして以下に記載するように、その欠陥スポットがインク付けされ、または他の方法で書き留められる。
【0146】
この工程C8は、全てのダイの全ての欠陥データの集成であるウェハWの欠陥マップを作製し、そしてデータファイルに格納される。好ましい実施形態において、これは2値の白黒画像である。
【0147】
上記の検査工程への代替として、代替の工程C6は、ウェハ上の全てのダイ上を走査するために、連続的にプレート12を動かすことによりカメラ20を使用してウェハWの画像を収集する工程であり、それによりこのウェハはストロボライトにより、移動プレートに相関するシーケンスで照射され、各ダイはカメラ20の下で正確な時間でストロボされる。基本的には、移動プレート上の光の短い照射パルスは、画像を効果的に「フリーズ」させる。これはカメラを第一のダイと整列させるための停止および作動手順を必要とすることなく、画像の連続的収集、観察およびそのダイの記録を可能にし、そしてプレート12を動かしてカメラを他のダイと整列させ、この他のダイを観察して記録し、そしてこれらの工程をこのウェハ上の全てのダイが観察されて記録される、等まで繰り返す。
【0148】
全ての欠陥評価工程Dは、一般に所与のウェハWの欠陥検査の終了においてである。というのはこの点において欠陥分類がしばしば所望されるからである。この工程Cの欠陥検査または検出プロセスは、全て自動化され迅速であり、それにより一旦終了するとユーザーは、欠陥のための全てのダイまたはウェハでなはく、手作業でパラメータ、フィルタ、感度などに基づき発見された欠陥のみを、検査し得る。かなりの時間が節約される。
【0149】
工程D1は、工程C9で作製された欠陥マップを装填する。工程D2は、評価する欠陥を選択する(あるいはウェハ上のすべての欠陥を順に評価する)。工程D3は、プレート12を動かし、特定の欠陥がカメラ20の下で適切に配置されるようにウェハWを位置決めさせる。工程D4は、欠陥のユーザー観察工程および分類工程であり、システム10のユーザーが、観察された欠陥を観察し、そして分類するようにする。任意の数の分類が可能であり、そして分類はユーザー規定である。工程D5は、全ての欠陥が評価されそして分類されるまで、工程D2〜D4の繰り返しである。工程D6は、分類した欠陥マップを保存する工程、および代替的に、または追加的に欠陥情報を、データベースまたは他の管理および評価のための任意の数の他のフォーマットで、保存する工程である。
【0150】
全体の欠陥報告工程Eは、データベースフォーマットに格納されたデータを出力する工程またはプリントアウトする工程である。このデータは、次いで分析され得、または欠陥のタイプ、欠陥の頻度、欠陥の位置などの統計的分析または他の分析を実行するために他の方法で使用され、これはウェハWのメーカーにとって有用であり、メーカーが欠陥搭載領域に集中することを可能にする。この工程Eは、グラフィック、表形式、および実際の画像ディスプレイを含む複数のフォーマットでデータを報告するので完全なそして効果的なデータ分析を提供する。表形式フォーマットに配置されたデータは、数値が電気的フォーマットなどの他の値と容易に相関することを可能にする。グラフィカルデータ表示は、そうでなければ見ることが困難なトレンドを迅速に表示する。
【0151】
システム10は、Pentium(登録商標)Proまたは類似のコンピュータプラットフォームなどの標準的なコンピュータ技術に基づき、例えば直列形式およびネットワーク形式の両方の多くの異なる通信オプションを可能にする。例えば、このシステムはTCP/IP構成を含み、そしてあるいは、SEC−II/GEMまたは他のコンピュータ産業標準プロトコルを含み得る。
【0152】
システム10は、ドリフトマップを使用して検査を実行するためにもまた使用され得る。これは、ウェハWの個別のダイがフィルム上で裁断され、そしてそこから拾い上げて除去するために必要に応じて延ばされる場合に有用であり、これは周知技術である。ここでの問題は、このフィルム材料は不均一に伸張するため、伸張の間、直交性が損失され得、そしてダイが異なる方向に動くことである。ほぼ正方形または矩形の切断ダイは、今度は全ての異なる方向に配向され、そしてこのようなダイの列は、もはや直線状ではなく、むしろ波うった、または他の態様で方向性が無い。この大きい伸張と直交性の損失が生じると、ドリフトマップおよびドリフト工程が、これを補うために加えられる。この工程は典型的にはスキャニングの前に挿入される。
【0153】
1つの実施形態において、フレームグリッドが各ダイの考えられる配置を規定する目的のために作製される。隣接のダイを損傷させることなく、各ダイを拾い上げることをより容易にすることを可能にするために運ばれたフィルム切込みウェハを、伸張することは公知である。しかしこの伸張工程は、典型的には均一ではなく、方向性が無いダイをもたらす。このドリフトマップは、各ダイの伸張された位置を、切り込みの前の剛性、およびピッチのために既知であるダイの開始点を使用して予測する。
【0154】
ドリフトマップを作製するために、マークまたはダミーダイがウェハ上にn番目ごとに(例えば10番目ごとに)配置される。機械の視野を使用して、システム10は、マークをその考えられる位置において探し、そして次いで見つからない場合はその回りを見る。一旦、実際の位置が見つかると、この機械視野は、次のマークの考えられる位置へ進み、そしてこのプロセスを反復する。一旦全てのマークが見つかると、マークの間の一貫した性質を仮定してピッチが計算される。このピッチを使用して、そして切込みの前に各ダイのもとの位置を知ることにより、このダイの位置を正確に予測するドリフトマップが作製される。
【0155】
システム10は、自動焦点機能の使用もまた取込み得る。このような機能は、画像の走査が各所定の画像点において行われる場所での鮮明度計算に基づく。その後、鮮明度計算は、正確な焦点を見つけるために使用される。時間を節約するために、これはn番目ごとの画像のみにおいて行われ得る。
【0156】
要するに、操作の基本的な手順は、自動化ウェハ移送およびウェハマッピングオプションを除いて、次のようである。オペレータまたはユーザーは、「良好なダイ」は何かに関して、このシステムをまず訓練しなければならず、すなわち良好なダイモデルを作成するか、または既存の良好なダイモデルを選択する。上記のように、これは、正確な同じx,y,zおよびθ位置から、適切に複数の既知の良好なダイが画像化されるように各ダイを整列するために、位置マーカーを入力および使用する工程を含む。加えて、ウェハおよび/またはダイ形状、サイズ、ピッチ、行の数、列の数などは良好のダイの画像化の前に入力されなければならない。複数の良好なダイは次いで、それぞれ整列され、そしてCCDカメラにより観察され、その結果コンピュータシステムが、共通の性質をグルーピングすることにより、ピッチ、色、角度、位置などの範囲を注目することにより「良好なダイ」モデルを次いで形成する。基本的にシステム10は、ユーザー提供の良好なダイの既知の設定を見ることにより、ウェハ検査を実行する。一般に、少なくとも20または30のダイが提供されることが好ましいが、最小限または最大限は必要とされない。検査パラメータはまた、未知の品質のダイが良好なダイとされるためには、「良好なダイ」モデルの特定の特性にどれくらい近接して、適合しなければならないか、を表示するために設定される。これらは、感度パラメータおよび欠陥フィルタを含む。
【0157】
ユーザーはまた、事前に格納された検査レシピを作製または選択しなければならない。これには、ウェハWがどのようにカセットまたは他の格納容器から選択されるか、どのように各ウェハWの各ダイ上に欠陥検査のために選択されるか、どのように欠陥検査マップファイルが入力されおよび出力されるか、などに関する情報が含まれる。
【0158】
システム10は、今度は未知の品質のダイを検査する準備ができる。ウェハマッピングが活性化される場合に、必要な識別コードが使用されるならば、この点において、入力されなければならない。その後、ウェハW(または切込みウェハ、またはゲルパックのダイ、またはワッフルパックのダイなど)は、検査領域、特にウェハ検査プレート12(これは検査カメラの下にある)に配置される。これは、ウェハ提供手段14を使用して達成される。工程A1で規定されたおよび/または訓練された調節機能およびパラメータを使用して、「良好なダイ」が装填されているので、その後、ウェハ調節デバイス16が、ウェハを同じx、y、zおよびθ位置において整列させる。所望される拡大は、次いで選択され、そしてその後カメラ20が焦点化される。
【0159】
このシステムは今度は、ウェハWの選択された領域(第一ダイ位置)の画像を、第一ダイ位置などの選択された領域とカメラ20を整列させるためにプレート12を動かすことにより、カメラを使用して、収集するが準備でき、その結果、全ウェハ、ウェハの一部、ダイ、またはダイの一部であり得るその第一画像を撮り、そして次いでその画像を観察して記録する。自動化欠陥検査およびボンドパッド(bond pad)分析が、このダイのデジタル画像について実行される。もしこのダイがインク付けされていれば、これは自動的に「インク付けされたダイ」として識別(マッピング)される。もしこのダイがイン
ク付けされていなければ、そして欠陥が発見されなければ、そのときはこのシステムは、ダイ上の欠陥位置、サイズ、形状などの各欠陥についての詳細情報を収集および格納する。
【0160】
プレート12は、次いでカメラを他の選択された領域(これは次の隣接する、または隣接しない領域であり得る)に整列するために動かされ、第一画像に隣接する、その画像(第二ダイ位置)をウェハ上で撮る。基本的に、このプレートは、検査カメラの下で次のダイ位置へインデックス化される。この第二ダイ位置が次いで観察され記録される。これらの工程は、ウェハ上の全ての画像が観察され記録されるまで繰り返される。これらの画像観察工程と同時に、欠陥感度およびフィルタリングが、「良好なダイ」モデル観察に関連して使用され、最初の異常または「良好なダイ」モデルとこの画像との差が、実際の欠陥かどうか、またはこれらがフィルタ除去されるべきかどうかを決定する。ウェハWの欠陥マップは次いで、コンピュータシステムにおいて、その上に発見された全ての欠陥を含む、全てのダイの全ての欠陥の収集から作製される。
【0161】
他の実施形態においては、漸進的な工程でプレートを動かすのではなく、このプレートは、そのストロボ照射の間連続的に動かされる。このウェハのセクションは、次いでカメラが移動基板の各セクションの上を適切に位置されるとき、カメラをストロボ照射と同期させることにより走査され、ストロボ照射がこのカメラを介する画像収集と同時に生じる。
【0162】
所与のウェハW上の欠陥検査の終了において、欠陥分類がしばしば所望される。各記録された欠陥は、特定の欠陥が位置するウェハW上の位置へ、プレート12が動かされた場所で、ユーザーにより人手で評価されるので、ユーザーは、この欠陥を観察しそして分類し得る。これは次いで、全ての欠陥について繰り返される。この分類された欠陥は、次いで分類された欠陥マップとして保存される。
【0163】
そのウェハは次いで除去され、そして他のウェハが検査のために装填される。この除去および新規の装填は、人手により行われるか、または自動的に実行され得るかのいずれかである。
【0164】
従って、本発明は上記および当業者により理解されるように、簡単化され、効率的で安全な安価なそして効果的なデバイス、システム、方法を提供し、これらは挙げられた目的の全てを達成し、従来技術のデバイス、システムおよび方法で遭遇する困難の除去を提供し、そして問題を解決し、この分野における新しい結果を得る。
【0165】
前述の記載において、特定の用語が簡単、明瞭、および理解のために使用されたが、このような用語は説明の目的のために使用され、そして広く意図されるように理解されるから、不必要な限定はそこから従来技術の要求を超えては意味しない。
【0166】
さらに、本発明の記述および図示は、例示のためであり、本発明の範囲は、示されたまたは記載された正確な詳細には限定されない。
【0167】
本発明の機能、発見および原理、本発明が理解されそして使用され態様、この構成の特徴、および有利な、新規な、そして有用な得られた結果について記載したが、新規なそして有用な構造、デバイス、要素、配列、部品、および組み合わせは、添付の特許請求の範囲に記載される。
【0168】
本発明の好ましい実施態様、出願人が原理を適用することを意図する最良の様式の図は、以上の説明に記載され、図に示され、特に明確に指摘され、添付の特許請求の範囲に記載される。
【0169】
同じ番号は、図面全体を通して同じ部分を示す。
【技術分野】
【0001】
(関連出願の参照)
本出願は、1998年7月15日に出願された、米国仮特許出願第60/092923号および同第60/092701号の利益を主張する。
【0002】
(発明の背景)
(技術分野)
本発明は、半導体産業のための欠陥検査システムに関係する。より詳細には、本発明は、フィルムフレーム上、JEDECトレイ、Auerボート、ゲルパックまたはワッフルパック(waffle pack)のダイ、MCMとしばしば呼ばれる多チップモジュールなどのような、パターンウェハ(patterned wafer)、全ウェハ、切込みウェハ(sawn wafers)のための自動化欠陥検査システムに関し、これは、具体的には、金属被膜(metalization)欠陥(スクラッチ、ボイド、腐食、ブリッジング)、拡散欠陥、パシベーション層欠陥、スクライビング欠陥、ガラス絶縁欠陥、切込み由来のチップおよびクラック、および隆起またはボンドパッド領域欠陥(例えば、金またはハンダ隆起欠陥あるいは類似の相互接続欠陥)のような欠陥のための第2の光学ウェハ検査について意図され、設計される。具体的には、本発明は、集積回路、写真平板回路網を埋めこまれたLCDパネルなどの自動化欠陥検査システムであり、ここで、このシステムは、以下のように使用される:このシステムは、優良なダイモデルを生じる画像ヘッド下で複数の既知の優良なダイを観察することによって訓練され、検査レシピが検査パラメータを規定するためにシステムに入力され、ダイが装填され、整列され、優良なダイモデルとの比較で欠陥について画像ヘッドによって観察される場所で欠陥検査が行われ、確認された欠陥の任意の評価が行われ得、ユーザーは、必要に応じてその報告を受容または出力し得る。
【背景技術】
【0003】
(背景の情報)
過去数十年に渡って、半導体は、使用および一般性において指数関数的に成長している。半導体は、コンピューター、エレクトロニクスの進歩を導入し、一般的に、多くの以前には困難、高価および/または時間を消費する機械プロセスを単純化した素早い電気的プロセスに変革することによって、事実上、社会に変革をもたらした。半導体におけるこのブームは、コンピュータおよびエレクトロニクス、より具体的には、それが組立ラインにて、研究室の試験設備にて、机上のパソコンにて、またはホームエレクトロニクスおよびおもちゃにてであるかどうかにかかわらず、より速く、より進歩したコンピュータおよびエレクロトニクスについてのビジネスおよび個人による飽くことのない望みによって刺激されている。
【0004】
半導体の製造は、最終製品の品質、スピード、および実行において、ならびに製造プロセスの品質、スピード、および性能において大きな改善がなされている。しかし、より速く、より信頼性があり、より高い性能の半導体に対する需要が続いている。
【0005】
過去十年ほどに渡って発展された1つのプロセスは、半導体検査プロセスである。製造プロセス全体に渡って半導体を検査する際の利点は、不良なウェハが最終検査によるかまたは使用時の失敗によるのいずれかによって完成までプロセスされて欠陥が存在することが分かるのみではなく、種々の工程で除かれ得る点で明らかである。
【0006】
半導体製造プロセスの典型的な例は、以下のように要約される。裸全ウェハが製造される。その後、回路網が裸全ウェハ上に作製される。次いで、回路網を有する全ウェハは、ダイとしてこの産業において公知のより小さなピースに切込みされる。その後、ダイは、当該分野で周知の、典型的には、ワッフルパックおよび/またはゲルパックにあるいは基板のダイとしてプロセスされる。
【0007】
今日、種々の検査プロセスがこの半導体プロセスの間に行われることが周知である。裸ウェハ検査は、砂から最初に作製した後および/またはそのウェハの洗浄の後の長時間後ではなく、必ず回路網を形成するいずれの層の堆積の前に、裸全ウェハで行われ得る。裸ウェハ検査の間に検査される欠陥には、表面粒子、および表面不完全または不規則が挙げられる。
【0008】
層の堆積の間(これは、回路構築である)、全ウェハ上で、1つ以上の第1光学検査が行われ得る。第1光学検査は、回路網作製の間のウェハの「プロセス中」検査である。この第1検査は、それぞれの層が堆積した後に、あまり頻繁ではない間隔で、または1度だけ、全ての堆積の間またはその後であり得る。この第1の光学検査は、普通、0.1ミクロンから<1ミクロンの範囲でサブミクロンレベルである。このプロセスは、マスク位置合わせまたは余分な金属、不足の金属、混入物などのような欠陥をチェックするために使用される。この第1の検査は、ウェハの回路網発展の間に行われる。
【0009】
一旦、全ウェハが少なくとも完全に堆積する(全ての回路網がその上に作製される)と、ポスト第1(または第1.5)検査は、完全にプロセスされた全ウェハで行われる。一般的に、これは、パシベーション層の堆積の前であるが、その必要はない。さらに、このポスト第1検査は、一般的に、全ウェハの電気的検査またはプロ−ビングの前である。この検査は、典型的に、0.5ミクロン〜1ミクロンの光学的検査である。
【0010】
全ウェハが完全にプロセスされた後に、1以上の第2光学検査が行われる。前部端(front end)第2光学検査は、全ウェハが完全にプロセスされた後に、プロービングが必要な場合には、デバイスの品質を決定するためのこのプロービングまたは電気的試験の直前または直後に行われる。後部端(back end)第2光学検査は、ダイまたはウェハに隆起を適用する間、ウェハを切込み(sawn)ウェハに切込みをする間またはその後、ウェハをさいの目に切る間またはその後、ダイを摘み上げ、トレイもしくはワッフルパックもしくはゲルパックのような他のパッケージに置く間またはその後、ウェハを基盤上に置く間またはその後などのような種々の段階で行われる。この第2光学検査は、一般的に、1+ミクロンのレベルであり、一般的に、金属被膜欠陥(例えば、スクラッチ、ボイド、腐食、およびブリッジング)、拡散欠陥、パシベーション層欠陥、スクライビング欠陥、ガラス絶縁欠陥、切込み由来のチップおよびクラック、およびプローブまたはボンドパッド領域欠陥である。
【0011】
実際のパッケージングの後に、第3光学検査が行われる。このパッケージングは、以下のうちの少なくとも1つを含む:ダイを基板上に配置する工程、ダイをワイヤーボンディングする工程、リード線を接続する工程、フリップチップにボールを接続する工程など。この時点で、検査は、ボールグリッドアレイ、リード線直線性、ワイヤーボンディング、インクマーキング、および任意のパーケージに対する欠陥(例えば、チップ、クラックおよびボイド)を検査する工程を含む。この第3のレベルの検査は、一般的に、5+ミクロンのレベルである。
【0012】
この半導体検査産業の焦点は、裸ウェハおよび第1光学検査である。多くの業界大手が、ADE、KLA、Tencor、Inspex、Applied、Orbitなどを含むこれらの検査を実行するための第1光学検査システムを開発し、特許化し、製造し、市販している。
【0013】
しばしば、この装置は、非常に高価で大きい。第1検査段階では、この費用および機械の大きさの問題は、後の検査段階ほどには重要ではない。なぜなら、比較的少数の団体のみがシリコンウェハを製造し、従って、裸または切込みウェハを購入し、さらにこれらを最終チップにプロセスする非常に多くの会社と比較すれば、裸ウェハを検査することが必要であるからである。これらは、しばしば、高価で大きな検査デバイスは、より小さな店などに対して費用が正当ではなく、第2および第3段階における必要性を満足し、そしてプロセスウェハを仕上げる非常に多くのより小さな会社に対してより経済的な検査装置が必要である。
【0014】
より少ない程度、いくらかの資金が第3光学検査に費やされ、STI、View Engineering、RVSI、およびICOSを含むいくらかの会社がこの目的のためにシステムを開発し、それらのシステムを市販している。
【0015】
しかし、これらのシステムのいずれも、第2光学の特定および独特の制約に取り組まず、この領域は大部分無視されている。実際の適用において、第2の光学検査は、人および顕微鏡装置を使用する手動の検査によってわずかに実行されている。この手動のプロセスは、操作者のストレス、目の疲労、倦怠ならびに、発見の重要性についての、異なる操作者による異なる認知を含む種々の因子のために不正確である。さらに、より小さな回路形状、およびより高いスループット要求がこの第2光学レベルにおける半導体検査における要求を増しており、これら全ては、さらに操作者のストレス、目の疲れ、および時々より低い品質という結果になる。
【0016】
金属被膜欠陥(スクラッチ、ボイド、腐食、およびブリッジング)、拡散欠陥、パシベーション層欠陥、スクライビング欠陥、ガラス絶縁欠陥、切込み由来のチップおよびクラックなどに対する検査についての必要に対する第2の光学検査段階に加えて、隆起が最近さらに重要になっている。これは、リード線よりも、隆起インターフェース接続またはフリップチップの使用における最近の流れのためであり、第2光学検査の重要性を拡大し、従って手動検査を越える装置およびシステムの必要性がある。
【発明の概要】
【発明が解決しようとする課題】
【0017】
(本発明の目的および要旨)
現在の手動検査プロセスを置き換える自動化検査システムを提供することが本発明の目的である。
【0018】
第2光学検査システム技術の新規な状態を提供することが本発明のさらなる目的である。
【0019】
パターンウェハ、全ウェハ、切込みウェハ、JEDECトレイ、Auerボート、ゲルパックまたはワッフルパックのダイ、MCMなどの自動化欠陥検査システムを提供することが本発明のさらなる目的である。
【0020】
第2光学ウェハ検査を特に意図し、そのために設計された自動化欠陥検査システムを提供することが本発明のさらなる目的である。
【0021】
金属被膜欠陥(スクラッチ、ボイド、腐食、ブリッジング)、拡散欠陥、パシベーション層欠陥、スクライビング欠陥、ガラス絶縁欠陥、切込み由来のチップおよびクラック、プローブ領域欠陥、隆起領域欠陥および/またはボンドパッド領域欠陥のような欠陥を検査するために自動化欠陥検査システムを提供することが本発明のさらなる目的である。
【0022】
各ウェハの各ダイの手動顕微鏡検査の必要性を除くまたは有意に減らす自動化欠陥検査システムを提供することが本発明のさらなる目的である。
【0023】
正確で素早い方法でさらに小さい回路形状を観察する自動化欠陥検査システムを提供することが本発明のさらなる目的である。
【0024】
手動検査よりもより高いスループットを提供する自動化欠陥検査システムを提供することが本発明のさらなる目的である。
【0025】
改善された検査の質および一貫性を提供する自動化欠陥検査システムを提供することが本発明のさらなる目的である。
【0026】
改善されたプロセスコントロールを提供する自動化欠陥検査システムを提供することが本発明のさらなる目的である。
【0027】
検査レシピを有し、ユーザーの検査要求に対してシステムをカスタマイズするためにこのようなレシピを作成し、コピーし、編集する自動化欠陥検査システムを提供することが本発明のさらなる目的である。
【0028】
半導体ウェハ観察を実行するためにデジタルイメージを使用する自動化欠陥検査システムを提供することが本発明のさらなる目的である。
【0029】
優良なダイを検査することによって訓練され、その結果、一旦、訓練されるとシステムがそれが学習したことから変化を検出する自動化欠陥検査システムを提供することが本発明のさらなる目的である。
【0030】
訓練可能な自動化欠陥検査システムを提供することが本発明のさらなる目的である。
【0031】
優良なダイのモデルを開発し、このモデルを未知の品質のダイを検査するために使用する自動化欠陥検査システムを提供することが本発明のさらなる目的である。
【0032】
優良なダイモデルを使用して、「優良ダイ」訓練工程および欠陥検査工程を含む自動化欠陥検査システムを提供することが本発明のさらなる目的である。
【0033】
「優良ダイ」訓練工程、検査レシピ作成工程、および欠陥検査工程を含む自動化欠陥検査システムを提供することが本発明のさらなる目的である。
【0034】
「優良ダイ」訓練工程、検査レシピ作成工程、欠陥検査工程、欠陥評価工程、および報告発行または出力工程を含む自動化欠陥検査システムを提供することが本発明のさらなる目的である。
【0035】
各ダイが均一に位置されるように、各ウェハ、基板、または検査されるためのダイを備える他のデバイスの多次元調節を提供する自動化欠陥検査システムを提供することが本発明のさらなる目的である。
【0036】
各ダイが均一に配置されるように、各ウェハ、基板、または検査されるためのダイを備える他のデバイスのx、y、シータ(θ)調節を提供する自動化欠陥検査システムを提供することが本発明のさらなる目的である。
【0037】
各ウェハの粗(course)調節、微細調節、および/または焦点化を提供する自動化欠陥検査システムを提供することが本発明のさらなる目的である。
【0038】
多数の優良なダイを観察し、それからモデルを発展させることによって「優良なダイ」のモデリングを提供する自動化欠陥検査システムを提供することが本発明のさらなる目的である。
【0039】
静的および適切に整列されたダイを観察するための画像ヘッドまたはカメラを使用する欠陥検査を提供する自動化欠陥検査システムを提供することが本発明のさらなる目的である。
【0040】
動的にまたは動きながらなお適切に整列されたダイを観察するための画像ヘッドまたはカメラを使用する欠陥検査を提供する自動化欠陥検査システムを提供することが本発明のさらなる目的である。
【0041】
動的にまたは動きながらなお適切に整列されたダイを観察するための画像ヘッドまたはカメラを使用する欠陥検査を提供する自動化欠陥検査システムを提供することが本発明のさらなる目的であって、ここで、ストロボ照射が動的に動くダイの静止図を撮るために使用される。
【0042】
欠陥を検出されたシステムの評価を提供する自動化欠陥検査システムを提供することが本発明のさらなる目的であって、これによってユーザーが全てのダイまたはダイの全ての部分を見る必要がなく、代わりにマークされたまたは気付いた欠陥を観察するだけである。
【0043】
ダイ位置または間隔のドリフティングまたは不規則性を説明する方法を提供する自動化欠陥検査システムを提供することが本発明のさらなる目的である。
【0044】
ダイが不規則に間隔が置かれ、回転され、ドリフトされるなどである延ばされたフィルムフレームを検査するための手段を提供する自動化欠陥検査システムを提供することが本発明のさらなる目的である。
【0045】
サイズ、位置、形、形状ならびにハンダ隆起、金隆起、ボンドパッドなどの他の特徴を測定するための方法を提供する自動化欠陥検査システムを提供することが本発明のさらなる目的である。
【0046】
金隆起、ハンダ隆起、相互接続などの質、またはボンドパッド上のプローブマークを検査するための方法を提供する自動化欠陥検査システムを提供することが本発明のさらなる目的である。
【0047】
ボンドパッド、隆起または相互接続の欠陥を検出するための方法を提供する自動化欠陥検査システムを提供することが本発明のさらなる目的である。
【課題を解決するための手段】
【0048】
本発明のなお他の利点および利益は、以下の要約および詳細な説明を読んで理解することによって当業者に明らかになる。
【0049】
従って、本発明は、これらおよび他の目的を満足し、これは自動化検査装置、システムおよびプロセスに関係する。具体的には、本発明は、全パターンウェハ、切込みウェハ、破損ウェハ、部分ウェハ、およびフィルムフレーム上の任意の種類のウェハ、ダイ、ゲルパックのダイ、ワッフルパックのダイ、しばしばMCMと呼ばれる多チップモジュール、JEDECトレイ、Auerボート、ならびに検出のための他のウェハおよびダイパッケージ構成を含む任意の形態の半導体ウェハを検査する自動化方法であり、この方法は、(1)複数の既知の優良ウェハの光学的観察によって優良なウェハのパラメータについてモデルを訓練する工程、および(2)このモデルを使用する未知の品質のウェハを検査する工程を包含する。
【0050】
例えば、本発明は以下の項目を提供する。
【0051】
(項目1)自動化方法であって、全パターン化ウェハ、切込みウェハ、破損ウェハ、部分ウェハ、およびフィルムフレーム上の任意の種類のウェハ、ダイ、ゲルパックのダイ、ワッフルパックのダイ、MCMと呼ばれる多チップモジュール、JEDECトレイ、Auer ボート、ならびに他のウェハおよびダイパッケージ形状を含む、任意の形態における半導体ウェハを欠陥について検査する自動化方法であり、該方法は、以下の工程:
複数の既知の良好なウェハの光学的観察を介して、良好なウェハのパラメータに関してモデルを訓練する工程;および
未知の品質のウェハを該モデルを使用して検査する工程、
を包含する方法。
【0052】
(項目2)上記モデルを訓練する工程が、カメラを介して複数の既知の良好なウェハを整列させる工程、および観察する工程を包含する、項目1に記載の自動化検査方法。
【0053】
(項目3)上記モデルを訓練する工程が、上記複数の既知の良好なウェハの各々の画素の格子における各画素のグレイスケール測定をする工程、を包含する項目2に記載の自動化検査方法。
【0054】
(項目4)上記モデルを訓練する工程が、0から255スケールまでの各画素の上記グレイスケール測定をする工程、をさらに包含する、項目3に記載の自動化検査方法。
【0055】
(項目5)上記モデルを訓練する工程が、上記複数の既知の良好なウェハにおいて、各画素に対するすべての上記グレイスケール測定の平均および標準偏差を計算する工程をさらに包含する、項目3に記載の自動化検査方法。
【0056】
(項目6)上記複数の既知の良好なウェハの、各画素に対する全ての上記グレイスケール測定の上記平均および標準偏差を計算する工程が、上限及び下限を提供し、その間において、未知の品質のウェハにおける等価な画素におけるグレイスケール測定が良好とされるが、一方で該上限および下限の外側の、未知の品質のウェハにおける等価の画素におけるグレイスケール測定が、少なくとも疑わしい完全性とされる、項目5に記載の自動化検査方法。
【0057】
(項目7)どれくらい多くの標準偏差が、上記平均から離れているかを示す値である検査パラメータが、上記上限および上記下限を規定する際に、受容可能であるかに関して、システムを訓練する工程をさらに包含する、項目6に記載の自動化検査方法。
【0058】
(項目8)ウェハの調節機能およびパラメータに関して、システムを訓練する工程をさらに包含する、項目1に記載の自動化検査方法。
【0059】
(項目9)少なくとも以下:ウェハ形状、ウェハサイズ、ウェハ上のダイ形状、ウェハ上のダイサイズ、ウェハ上のダイの行の数、ウェハ上のダイの列の数、の1つに関してシステムを訓練する工程をさらに包含する、項目1に記載の自動化検査方法。
【0060】
(項目10)検査パラメータに関してシステムを訓練する工程をさらに包含する、項目1に記載の自動化検査方法。
【0061】
(項目11)少なくとも以下:基板がどのように格納容器から選択されるかを規定する工程、ウェハ上のダイが欠陥検査のためにどのように選択されるかを規定する工程、および必要であれば、どのように検査マップが入力され、または出力されるかを規定する工程、のうちの1つの工程を実行するための検査の間に使用される検査レシピを作製する工程をさらに包含する、項目1に記載の自動化検査方法。
【0062】
(項目12)検査の完了に次いで欠陥評価する工程をさらに包含し、それにより良好なウェハモデルに合わないダイのみが評価される、項目1に記載の方法。
【0063】
(項目13)自動化システムであって、全パターンウェハ、切込みウェハ、破損ウェハ、部分ウェハ、およびフィルムフレーム上の任意の種類のウェハ、ダイ、ゲルパックのダイ、ワッフルパックのダイ、しばしばMCMと呼ばれる多チップモジュール、JEDECトレイ、Auer ボート、ならびに他のウェハおよびダイパッケージ形状、を含む任意の形態のウェハなどの基板を欠陥について、検査するための自動化システムであり、該システムは以下:
ウェハ検査プレート;
該検査プレートにウェハを提供するための手段;
同じ、x、y、zおよびθ位置において、該検査プレートに提供された各々のおよび全てのウェハを整列させるためのウェハ調節デバイス;
訓練の間の複数の既知の良好な品質のウェハの視覚的入力のための、そして検査の間の他の未知の品質のウェハの視覚検査のための、視覚検査デバイス、および、
コンピュータシステムであって、複数の既知の良好な品質のウェハ上の各画素に対して、グレイスケール測定を取ることにより、良好な品質のウェハのモデルを開発するための、処理工程およびメモリ能力を有し、そこからの各画素位置に対する、平均および標準偏差を計算し、さらに他の未知の品質のウェハを該モデルと比較して比べる、コンピュータシステム、
を備えるシステム。
【0064】
(項目14)少なくとも上記ウェハの一部の画像を、カメラにより見られるように焦点化するための焦点化機構をさらに備える、項目13に記載の自動化システム。
【0065】
(項目15)上記視覚検査デバイスがカメラである、項目13に記載の自動化システム。
【0066】
(項目16)上記視覚検査デバイスがCCDカメラである、項目13に記載の自動化システム。
【0067】
(項目17)感度パラメータ、形状、ダイサイズ、ダイ形状、ダイピッチ、行の数、および列の数を含む、パラメータおよび他の制約もしくは情報を入力するためのパラメータを入力するデバイスをさらに備える、項目13に記載の自動化システム。
【0068】
(項目18)上記視覚検査デバイスにより見られる光景を、現状においてもしくは以前の保存された時間において、表示するためのディスプレイをさらに備える、項目13に記載の自動化システム。
【0069】
(項目19)上記モデルの外側にあるウェハの画素上にもしくは該画素に隣接して、マークを配置するためのマーキングヘッドをさらに備える、項目13に記載の自動化システム。
【0070】
(項目20)フレームおよびフードをさらに含み、該フレーム上で上記ウェハ検査プレート、上記ウェハ調節デバイス、上記視覚検査デバイス、および上記コンピュータシステムが装着され、そして該フードが該検査プレート上の検査領域を包囲するためにある、項目13に記載の自動化システム。
【図面の簡単な説明】
【0071】
【図1】図1は、システムの1つの実施態様の斜視図である。
【図2】図2は、プロセスの全体のフローチャートである。
【図3】図3は、図2に示されるプロセスの1つの工程のより詳細なフローチャートである。
【図4】図4は、図2に示されるプロセスの1つの工程のより詳細なフローチャートである。
【図5】図5は、図2に示されるプロセスの1つの工程のより詳細なフローチャートである。
【図6】図6は、図2に示されるプロセスの1つの工程のより詳細なフローチャートである。
【図7】図7は、図2に示されるプロセスの1つの工程のより詳細なフローチャートである。
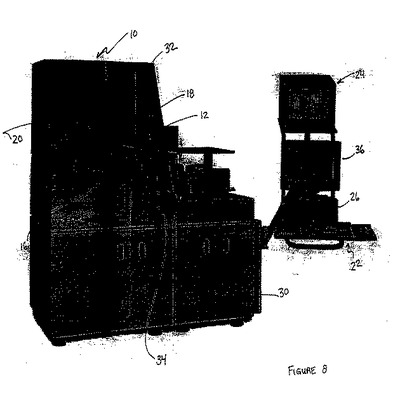
【図8】図8は、異なる角度での図1に示されるシステムと類似のシステムの全体的な斜視図である。
【図9】図9は、ウェハ頂部プレートおよびオプティクスの正面図である。
【図10】図10は、ウェハ頂部プレートおよびオプティクスを含む検査ステーションの一部の左正面斜視図である。
【図11】図11は、検査ステーションの頂部の右正面斜視図である。
【図12】図12は、図11に示される検査ステーションの頂部の右側面斜視図である。
【図13】図13は、オプティックスおよびウェハ頂部プレートの拡大図である。
【図14】図14は、図9のウェハ頂部プレートおよびオプティクスの側面図である。
【図15】図15は、図10〜12に示される検査ステーションの左側面斜視図である。
【図16】図16は、ウェハ頂部プレートおよびx、y、およびθ調節器(aligner)の拡大図である。
【図17】図17は、検査およびウェハハンドリングステーションの頂部分の部分斜視図である。
【図18】図18は、本発明のウェハハンドリングおよびウェハ頂部プレート部分の拡大図である。
【図19】図19は、ウェハハンドリングステーションの側面図である。
【図20】図20は、本発明の暗視野オプションの部分図である。
【図21】図21は、暗視野オプションの暗視野レーザーの拡大図である。
【発明を実施するための形態】
【0072】
(好ましい実施態様の説明)
本発明の自動化欠陥検査システムは、一般的に10で示され、これは図1および8に全体として(図2〜7および9〜21に詳細な部分で)最良で示され、1つの実施態様において、パターンウェハWのダイの欠陥を見つけるために使用され、この使用ならびに、全ウェハ、切込みウェハ、破損ウェハ、フィルムフレーム、ゲルパックのダイ、ワッフルパックのダイ、MCM、JEDECトレー、Auerボート、および他のウェハの任意の種類のウェハならびにダイパッケージ構成を検査することを含む他の使用が意図される(但し、以後、これらの使用の全てが、ウェハWの検査として一般的に示される)。このシステムは、以下を含む(これらには限定されない)多くの種類の欠陥について検査する:金属被膜欠陥(スクラッチ、ボイド、腐食、ブリッジングなど)、拡散欠陥、パシベーション層欠陥、スクライビング欠陥、ガラス絶縁欠陥、切込み由来のチップおよびクラック、プローブまたはボンド領域欠陥(例えば、プローブマークの損失、変色、金属損失およびプローブブリッジング)、拡散不良、ベーポックス(vapox)など。このシステムはまた、さらにまたは代わりに、相互接続または隆起(金またはハンダ隆起)を、欠陥またはサイズおよび形のような他の特徴について検査するために使用される。
【0073】
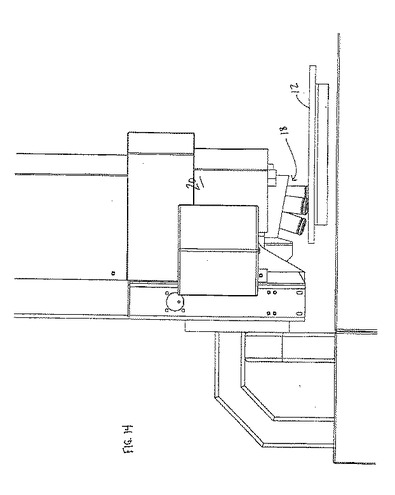
このシステムおよびプロセスは、一般的に図2に示されるように、システムの訓練工程(工程A)、検査レシピを作成する工程(工程B)、この訓練およびレシピに基づくダイまたはウェハを検査する工程(工程C)、所望であれば、欠陥評価(工程D)、および所望であれば、欠陥報告工程(工程E)の多工程プロセスを含む。この目的を実行するためのシステム10は、一般的に、ウェハ試験プレート12、試験プレートにウェハを提供するための14として示される手段、同じx、y、およびθ位置またはx、y、zおよびθ位置にそれぞれのウェハを整列するためのウェハ調節デバイス16(x−y−θまたはx−y−z−θ調節器(aligner))、フォーカス機構18、カメラ20または訓練の間優良なダイの視覚的入力のための、そして検査の間他の未知の品質のダイの視覚的検査のための他の視覚検査デバイス、パラメーターおよび感度パラメーター、形状、ダイのサイズ、ダイの形、ダイのピッチ、行の数、列の数などの他の制約または情報を入力するためのパラメーター入力デバイス22、現在または任意の以前の保存された期間、カメラによって見られる視界を表示するためのディスプレイ24、コンピューターシステム26または入力された優良なダイを保存し、そこからモデルを開発し、モデルとの比較において他のダイを比較し分析するためにプロセシングおよびメモリー能力を有する他のコンピューターのようなデバイス、マーキングヘッド28、フレーム30、フード32、コントロールパネル34、およびシステムパラメーターディスプレー36を備える。
【0074】
より詳細には、システム10および関連するプロセスは以下のようである。最初に図2に示され、図3により詳細に示される訓練工程(工程A)は、(1)訓練の間の使用のためにコンピューターシステム26において調節機能およびパラメータを規定する工程および/または訓練する工程(および格納する工程)(ここでこの全てが工程A1に示される)、(2)ウェハおよび/またはダイ形状、ウェハおよび/またはダイのサイズ、ダイのピッチ、行の数、列の数などを規定する工程(およびコンピュータシステムに入力する工程)および訓練および/または検査の間で使用するために、全てのこのような情報をコンピューターシステム26に格納する工程(ここで、この全てが工程A2として示される)、(3)理想のダイが観察される通常の特徴に基づいてどのように見えるかを規定するために、デバイス16によって整列され、カメラ20によって複数の既知の優良なダイを観察し、コンピュータシステム26内のモデルを形成することによって、「優良ダイ」が何を含むかについてシステムを訓練する工程(ここで、この全てが工程A3に示される)、(4)未知の品質のダイが優良と考えられる優良なダイモデルにどれだけ近くマッチしなければならないか(すなわち、正確なモデルからのどんな違いが依然として優良なダイと考えられるために許容か)をコンピューターシステム26に対して示す値である検査パラメーターを設定する工程(ここで、この全ては、工程A4に示される)、(5)この訓練モデルおよびその機能、パラメータなどをコンピューターシステム26に保存する工程(工程A5に示される)、を包含する。
【0075】
検査レシピを作成する工程(工程B)は、新規なレシピを作成する工程(以前に規定されたレシピが使用されるべき場合、Bの作成工程はスキップされる)を包含する。新規のレシピを作成する工程は、(1)ウェハWがどのようにカセットまたは他の格納容器から選択するかを規定する工程(ここで、この全ては、工程B1として示される)、(2)各ウェハWのダイが、どのように欠陥検査のために選択されるべきかを規定する工程(ここで、この全体は工程B2として示される)(しばしばダイは、逐次的なまたは類似の順番で検査されるのみであるが、他の任意の順番が規定され得る)、(3)欠陥検査マップファイルがどのように入力され、出力されるかを規定する工定(ここで、これは工程B3として示される)、および(4)このレシピを保存する工程(ここでこれは工程B4である)、を包含する。
【0076】
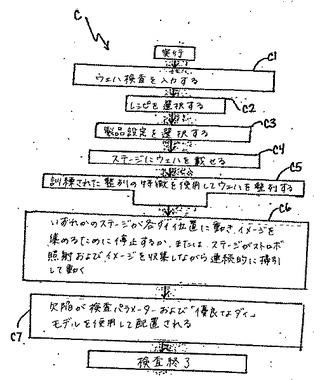
欠陥検査として示される、検査工程(工程C)は、(1)ウェハ同定コードを入力する工程(所望の場合)、工程C1として示される、(2)工程Bに規定されるレシピを選択する工程(ここで、この選択工程は工程C2である)、(3)製品の設定を選択する工程および入力する工程(これは工程C3である)、(4)ウェハ提供手段14を使用してウェハ試験プレート12にウェハを装填する工程(ここで、装填する工程は工程C4である)、(5)それぞれのウェハを同じx、y、およびθ位置またはx、y、z、およびθ位置に調節するためにウェハ調節デバイス16を使用し、規定されたおよび/または訓練された工程A1の調節機能およびパラメータを使用する、ウェハ試験プレート12のウェハを整列する工程(その全てが工程C5として示される)、(6)所望な場合、ウェハWのカメラ20の焦点を合わせる工程(これは工程C6として示される)、(7)第1ダイまたはその他の部分を有するカメラを整列するために、プレート12を動かすことによってカメラ20を使用してウェハWのイメージを収集する工程、シャッターを開き、カメラがイメージを観察し記録し得ることによってダイまたはその部分を観察および記録する工程、プレート12をカメラと別のダイまたはその部分と整列させるためにプレート12を動かす工程、別のダイまたはその部分を観察し記録する工程、観察されることが所望されるウェハのダイまたはその部分の全てが観察され、記録されるまで、これらの工程を繰り返す工程(この全ては工程C7として示される)、(8)工程C7の間同時に、工程A3の「優良なダイ」モデルおよび工程A4の許容性に基づいて観測される所定のダイのどこの欠陥が位置するかを決定する工程(この全ては、工程C8である)、および(9)見出される全ての欠陥を含むダイの全てのイメージの全ての収集であるウェハWの欠陥マップを作成する工程(この全ては工程C9である)、を包含する。
【0077】
あるいは、工程C7は、ウェハ上のダイ全体にわたって走査するようにプレート12を連続的に移動させることによって、カメラ20を使用してウェハWの画像を収集する工程と置換され得る。この工程によって、このウェハは、プレートの移動速度に対応する順でストロボ光により照射され、その結果、各ダイがカメラ20の下にある正確な時刻にストロボ照射される。これによって、画像の連続的な収集の際に、カメラを第一のダイと整列させるための停止と前進(go)の手順、そのダイを観察および記録する工程、プレート12を移動させて別のダイと整列させる工程、この別のダイを観察および記録する工程、ならびにこれらの工程を、ウェハ上のすべてのダイが観察および記録されるまで繰り返す工程などの必要がなくなる。
【0078】
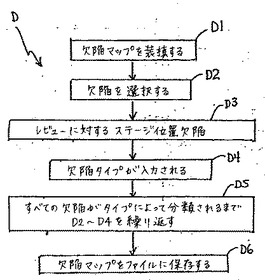
欠陥の評価Dが、所望ならば、そして所望されるときには、(これは一般に、所与のウェハW上の欠陥検査の終了の際である。なぜならこの時点で、その欠陥の分類がしばしば所望されるためである。)以下の工程を包含する:(1)工程C9において作成された欠陥マップを、ロードする工程(この再ロード工程を工程D1と称す)、(2)評価するための欠陥を選択する工程(あるいは、ウェハ上の全ての欠陥を順に評価する工程)(工程D2とする)、(3)プレート12を移動させ、これによって、ウェハWを、表面に欠陥を有する特定のダイがカメラ26の下の適切な位置となるように、位置決めする工程(これらは全て、工程D3である)、(4)ユーザーがその欠陥を観察および分類して、システム10のユーザーが、観察された欠陥を観察および分類する、工程(これらは全て、工程D4である)、(5)ユーザーが評価を所望する全ての欠陥が評価および分類されるまで、工程D2〜D4を繰り返す工程(工程D5とする)、ならびに(6)分類された欠陥マップを保存する工程(工程D6とする)、ならびに、代替または追加として、欠陥情報を、他の多数のデータベース用形式のうちの任意の形式で保存する工程、もしくは他の管理および評価。
【0079】
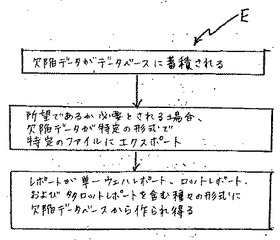
欠陥報告工程Eは、所望ならば、そして所望されるときには、工程D6においてデータベース形式に保存されたデータを、出力またはプリントアウトする工程を包含する。次いで、このデータは、分析されるかまたは他の様式で使用され、欠陥のタイプ、欠陥の頻度、欠陥の位置などに関して、統計的もしくは他の分析を実施し得る。この分析は、ウェハWの製造業者が、欠陥を有する領域に焦点を当てることを可能とするために、それら製造業者に有用である。
【0080】
上述の工程および副工程は、本発明のシステムおよびプロセスの、基本的な説明である。以下の記載は、様々な部品およびシステム、ならびにこれらが実行する工程の詳細の、さらに詳細な説明である。
【0081】
ウェハ試験プレート12は、回転ステージであり、これは、真空を用いる万能界面プラットフォームを備え、これらは全て、ウェハとダイパッケージとの固定に、フレキシブルな界面を提供する。ウェハ試験プレートは、全ウェハ、フィルムフレーム上の切込みウェハ、ゲルパック(gel pak)中のダイ、ワッフルパック(waffle−pak)内のダイ、MCM、JEDECトレイ、Auerボート、ならびにウェハとダイのパッケージの他の配置および構成を、迅速に設置および検査するように、規定される。
【0082】
ウェハを試験プレートに提供するための手段(14と称す)は、手動(これにおいては、ユーザーがそのウェハをカセットまたはマガジンから試験プレート12へと移動させる)であるか、あるいは図面の実施態様に示すように、自動であるかの、いずれかであり得る。自動の実施態様においては、ウェハ提供手段14は、ロボットアームを有し、このアームは、第一位置(ここで、ウェハWがマガジンまたはカセットから最初につかまれる)から第二位置(ここで、ウェハWが検査のためにウェハ試験プレート12上に位置決めされる)へと旋回する。検査の後に、このロボットアームは旋回して、ウェハWを試験プレート12における第二位置から第一位置へと戻し、ここでウェハWは、そのマガジンまたはカセットの内部または上に戻されて置かれる。
【0083】
ロボットアームは、図示の実施態様において、2つのセクションを有する2パートアームであり、第一のセクションは、中心支持点の周囲を旋回し、そして第二のセクションは、第一のセクションの端部の周囲を旋回する。1つの実施態様では、このロボットアームの周囲を、少なくとも1つのカセット受容器(図1においては2つ)、任意でウェハ予備調節器、および検査ステーションが囲み、これら受容器は、内部に複数のウェハが積み重ねられる標準的なウェハ移送カセットであり、ウェハ予備調節器は、ウェハの予備調節または粗調節を提供し、そして検査ステーションは、ウェハ頂部プレート12、x−y−θ調節器16、光学部品18、カメラ20などを備える。
【0084】
それぞれのウェハ全てを同一のx、y、z、およびθ位置で調節するための、ウェハ調節デバイス16は、回転モータ、ボールねじ、直接もしくはベルトで駆動されるモータ、ウォームギアもしくは他のギア、アクチュエータ、液圧装置、プッシュロッド、真空、あるいはこの回転ステージを、真っ直ぐにまたは角度をつけて正確な所望の位置に移動させるための、他の機械的もしくは電気的な機器の、精密なシステムである。
【0085】
検査中に使用されるものと同じ調節機構およびプロセスが、訓練中に使用される。図示の実施態様においては特に、ウェハ調節デバイスは、2−D x,yおよびθ調節プロセスであり、これは必要に応じて、z高さ制御と組み合わせられる。特に、1つの実施態様においては、それは2−D xおよびyの粗い調節(続いて精密なシータ(θ)調節)のプロセスであり、これらは全て、焦点マッピングプロセス(先に生成した高さまたは焦点のマップを使用する)(このプロセスは、高さすなわちzを決定するため、従ってウェハに焦点が合っていることを確認するためになされる)と組み合わせられ、その前になされる。基本的には、粗い調節は、ウェハのほぼ中心に位置するパターンを使用する。このパターンは、その上のxおよびyの位置を知るよう、および予測するよう訓練されており、これによって、このパターンと、ウェハのxとy(2−D直線)との配向が、少なくともそれを粗く調節するようなものであることが分かる。この配向は、ステージ12を使用して実施される。その後に、精密な調節が、ウェハの周囲の近くのパターンを使用して実施される。このパターンは、θ(回転)調節の補正が得られたことを知るよう訓練されている。この調節もまた、ステージ12を使用して実施される。両方の場合において、カメラがそのパターンを見出し、そして調節機構が、ウェハが調節されるまでウェハを移動させる。
【0086】
焦点のマッピングまたはz配向が、カメラおよび/またはカメラアーム距離を調節し、次いで下記のように焦点を合わせることによって、ならびに/あるいは対物レンズ(objective)を変えることにより、ならびに/あるいはカメラの焦点を合わせることにより、実施される。実施される調節は、ウェハの高さマップに基づく。この高さマップから、ウェハの予備プログラムされた点を使用して、焦点が規定される。
【0087】
焦点機構18は、光学画像化機構であり、異なる検査解析のための多数の光学部品を、内部に備える。モータ付きの顕微鏡タレットによって、画像化光学部品を、多数の選択肢から選択することが可能となる。例えば、多数の光学部品(例えば、3つまたは5つの光学部品)が供給され得、そして典型的な選択肢には、1.25倍、2.5倍、5倍、10倍、20倍、50倍、および100倍の対物レンズが挙げられるが、他の任意の対物レンズが考慮される。モータ付き顕微鏡タレットおよび別個の対物レンズは、光学的拡大の選択手段を提供する。
【0088】
カメラシステム20または他の視覚的検査デバイスは、訓練中の良好なダイの視覚的入力のため、および検査中の他の未知の品質のダイの視覚的検査のためのものである。このカメラシステムは、高解像度の検査が可能な任意のタイプのカメラであり得る。このようなカメラシステムの1部分の例は、3−CCD検査カメラであり、これは、欠陥分析中に、ダイまたは他の画像を捕捉するために使用される。
【0089】
本発明により考慮されるカメラシステム20の1つの例は、2カメラシステムであり、ここで、一方のカメラは検査カメラであり、そして他方のカメラは観察用カメラである。この検査カメラは、高解像度CCDカメラであり、これは、検査のために高解像度のグレースケール画像を提供する。観察用カメラは、例えば、758×582画素解像度、あるいは1008×1018画素解像度、あるいは他の既知の画素サイズで欠陥を見つける際の視覚的評価のための、高忠実度カラー画像カメラである。さらに、カメラを観察することによって、高品質のカラー画像が、オペレータが欠陥を評価するために、提供される。
【0090】
コンピュータ制御される光学部品は、欠陥の正確な検出のために要求される、歪みの低い画像を提供するために、作動距離の長い顕微鏡対物レンズを使用することを条件とする。多数の倍率が、下記のようにユーザーにより規定される検査レシピに基づいて、自動的に選択され得る。
【0091】
コンピュータ制御される照射は、検査カメラおよび光学部品の内部に、それらと共に一体化され、これによって、ウェハ画像化プロセスを完了する。あるいは、照射システムは、この照射システムがそのカメラと共に作動している限り、カメラおよび光学部品に取り付けられ得る。本明細書中に記載のような、ストロボ照射の環境においては、照射が、カメラのシャッター(これは、1つの実施態様においては、高速電子シャッター機構である)と同時にまたは実質的に同時に、起こらなければならない;あるいは、ストロボ照射しない環境においては、照射は典型的に、連続的であるか、または必要に応じてである。
【0092】
照射は、例えば、高強度光、レーザ、蛍光灯、アーク放電ランプ、白熱電球などの、任意の公知の照射手段により得る。照射角度は、明視野のみ、暗視野のみ、または明視野および暗視野の変動の両方のものであり得る。
【0093】
明視野照射は、基板を上から照射する工程を包含し、ここで、この照射システムは典型的に、この基板の真上に搭載されたカメラに隣接するか、またはこのカメラの一部である。この照射は、図1に示すように、基板に対して約90°程度の配向である。図示の実施態様においては、明視野照射器はカメラに隣接し、そしてこのカメラに調和して機能する。この明視野照射は、基板上の平坦なまたは比較的平坦な物体を照射する際に、非常に効果的である。なぜなら、この光は一般に反射されて、カメラに戻るためである。対照的に、基板上の3−d物体は、光を角度を付けて反射し、その光をカメラから離れた角度にさせる。その結果として、平坦な物体はカメラに明るく現れるが、一方で3−d物体は暗く現れる。
【0094】
暗視野照射は、しばしば、明視野と共に使用されて、3−d物体を「明るくする」か、あるいは、3−d物体を単に明るく見るためのみのために、使用される。暗視野光は、ウェハ頂部プレート12に対して低い角度で提供される。暗視野照射は、暗視野光が基板上の3−d物体に低い角度で導入される場合には基板に対してほぼ90°の角度で光をカメラまで反射するが、物体が平坦な場合には光の導入に対向する周辺に沿った低い角度で光を反射する、という点で、明視野とは逆に作用する。したがって、暗視野光は、3−d物体を明るく照射するが、平坦な物体はさほど照射しない。
【0095】
暗視野オプションを備えるシステム10は、図20〜21に最もよく示されるように、周辺の周りに間隔を空けて配置された複数の照射器を含む。1つの実施例においては、4つの照射器が使用され、そして各々が、90°の分離で互いから等しく間隔を空けている。別の実施例(1対が図示されている、図20〜21)においては、8つの照射器が45°の分離で使用され、そしてこれらに関して図面に示される代替物においては、照射器は90°の分離で対になってまとまっており、所与の角度で2倍の照射能を有する。
【0096】
システムが明視野および暗視野の両方の照射を備える場合には、ユーザーは、一方または他方あるいは両方を使用する選択肢を有する。このことは、重大な選択肢を提供する。例えば、上に平坦な物体のみを有する傾向があるダイについて検査が実施される場合には、明視野はこれらの物体を良好に照射し、このタイプの検査に非常に十分である。あるいは、3−d物体を有する傾向のあるダイについて検査が実施される場合には、暗視野で十分であり得る。しかし、多くの場合(例えば、一般には非常に平坦であるが非常に粗く、そこから突出する3−dの塊を含む傾向のある、金隆起を有するもの)において、これら2つの組合せがしばしば有利である。この実施例においては、明視野照射は、このようなスクラッチなどの任意の欠陥の存在および隆起の存在を示し、一方暗視野照射は、隆起上の塊および粗い表面を示す。暗視野がなければ、この隆起は暗い画像として映える。一旦、暗視野が導入されると、塊が、隆起上の白色スポットとして位置を確認される。
【0097】
暗視野はまた、欠陥の分類を補佐する。なぜなら、明視野光は、表面から突き出た粒子または欠陥と、その表面に埋没またはスクラッチされたものとを、区別しないためである。暗視野照射は、これらの突き出た欠陥と埋没した欠陥とを区別する。
【0098】
1つの実施態様においては、システム10は、明視野照射システムを含み、このシステムは、カメラに隣接して物理的に配置されるかまたはカメラに物理的に組み込まれ、これによって照射される物体の上から明視野照射を提供する。別の実施態様においては、システム10は暗視野照射システムを含み、このシステムは、ウェハ頂部プレート12の周囲の周りに、頂部プレートとは異なる低い角度(例えば、1°〜10°の角度)で配置される。なおさらなる実施態様においては、物体の上からの明視野照射と、物体の周囲の周りからの暗視野照射との両方が、備えられる。上で示したように、明視野および暗視野の照射システムにより提供されるような照射は、白色光源(例えば、白熱光、蛍光、または他の類似の気体封入型もしくは類似の電気の光)のような任意の公知の照射源により、あるいはレーザまたは類似のデバイスにより、提供され得る。
【0099】
パラメータ入力デバイス22は、パラメータおよび他の制約もしくは情報を入力するためのものである。これらのパラメータ、制約および情報には、感度パラメータ、形状、ダイのサイズ、ダイの形、ダイのピッチ、行の数、列の数などが挙げられる。任意の形態の入力デバイス(キーボード、マウス、スキャナ、赤外またはラジオ波の送信器および受容器などが挙げられる)が十分であることが考慮される。
【0100】
ディスプレイ24は、その時点または任意の以前の保存された期間にカメラによって見られる視界を、表示するためのものである。このディスプレイは、好ましくは、カラーモニタであるか、またはユーザーの視界、もしくはメモリに保存された画像を観察するためにカメラ20によって観察される画像のカラー表示フォーマットを表示するための他のデバイスである。このモニタ、または別の隣接もしくは他のモニタを使用して、システム10により使用されているカメラ20のグレースケール検査画像を観察し得る。このディスプレイ24は、検査の間に、カメラ20によって観察される画像を示すために、使用される。さらに、システムパラメータディスプレイ36がまた、ユーザーが所望するならば、システムパラメータのような他の情報を表示すために、利用可能である。
【0101】
コンピュータシステム26、または処理およびメモリ容量を有する他のコンピュータは、入力された良好なダイを保存するため、そのダイからモデルを生じさせるため、ならびに欠陥フィルタリングおよび感度パラメータに基づいて、欠陥が存在するかどうかを決定するために、そのモデルに対して他のダイを比較または分析するためのものである。コンピュータシステム26はまた、他の全ての数学的および統計的機能、ならびに全ての操作を実行するために、使用される。1つの実施態様においては、コンピュータシステム26は、平行処理DSP環境のものである。
【0102】
マーキングヘッド28は、欠陥のあるもののような特定のダイをマークするために、提供される。1つの実施態様においては、このマーキングヘッドは、ダイインク付け機構である。これが使用されて、それによって、それぞれのダイが検査後にインクを付けられ得るか、または欠陥のある全てのダイがインクを付けられ得るか、あるいは欠陥のある全てのダイが、評価および/もしくは分類の後にインクを付けられ得るか、などである。インク付けはまた、「強制的なインク付け」の様式においても使用され得、これによって、予備特定されたダイ(ウェハの縁部にある全てのダイなど)が、電気的検査または視覚的検査にかかわらず、インクを付けられる。
【0103】
エアナイフが、必要に応じて、ウェハを検査前にクリーニングするために提供される。このエアナイフは、基本的には、それを通って空気が注入され得る、何らかの設計の導管であり、ここでこの導管は、1つ以上のオリフィスまたはアウトレットを備える。この空気は、その導管上に選択的かつウェハに関して配置されたオリフィスから放出されて、評価の前に、ウェハから埃および他の粒子を吹き飛ばす。これによって、誤った欠陥の決定が排除される。
【0104】
これらのシステムおよび部品は、システム10の一部であり、そして欠陥検査の実施のために使用される。この欠陥検査は、上に簡単に記載されるが、ここで以下に詳細に記載する。
【0105】
訓練工程Aの全体を、以下にさらに詳細に記載する。
【0106】
工程A1は、訓練中に使用するためのコンピュータシステム26における調節特性およびパラメータを決定および/または訓練(ならびにコンピュータシステムに保存)する工程を規定する。この調節技術は、工程A3およびC5において以下に記載のように実施されて良好なダイを決定し、検査する場合には、2つの機能プロセスである。すなわち、物理的調節および画像調節である。この時点で、どのパラメータがこれら物理的および画像調節の間に使用されるべきかを規定する。これらのパラメータには、規定マーカー(例えば、物理的調節中に必要とされるもの)、ならびに別個の要素およびバッファ(例えば、画像調節中に必要とされるもの)が挙げられる。実際の物理的および画像調節工程は、以下に記載のように、工程A3およびC5の最中に起こる。
【0107】
工程A2は、ウェハおよび/またはダイの形状、ウェハおよび/またはダイのサイズ、ダイのピッチ、行の数、列の数などを規定(およびコンピュータシステムに入力)する工程、ならびにこのような情報すべてを、訓練および/または検査の間に使用するために、コンピュータシステム26に保存する工程である。
【0108】
工程A3は、システムを、「良好なダイ」が何を含むかに関して訓練する工程であって、デバイス16を介して複数の既知の良好なダイを調節する工程、およびカメラ20を介してそれらのダイを観察する工程、ならびにコンピュータシステム26中にモデルを形成して、観察された共通の特性、要素、範囲などに基づいて、理想的なダイがどのように見えるべきかを決定する工程による。良好なダイは、プロセスによる変動を有することが大いにあり得、そして実際にあり得るものを除き、欠陥を有さないダイとして定義される;しかし、これら全てのプロセスによる変動は、欠陥ではなく、むしろ受容可能な変動であるとみなされてきた。好ましくは、受容可能なランダムな逸脱の完全スペクトルの全体が、訓練中にこのシステムに示される、典型的には20、30、または100までの良好なダイのセットのこの訓練により、供給されるが、最小も最大も必要とされない。しかし、プールが大きくなるにつれて、結果はより正確になる。なぜなら、より良好な、より様々なモデルが作成されるためである。したがって、色のドリフトおよびコントラストのシフト、ならびに他の多数の逸脱は、この訓練セットの一部である。基本的には、システム10は、ユーザーが提供する既知の良好なダイのセットを研究することによって、ダイの検査を実施する。
【0109】
調節は、物理的調節または画像調節のいずれか、あるいはその両方を含み得る。物理的調節は、基本的に、特定の位置マーカーを、各ウェハ、ダイ、またはダイのサブセクション(これは、そのウェハおよびダイが位置決めされそして調節される起点となる位置決めポイントとして使用される)の、上または周囲に入力する工程を包含する。工程A1において、これらのマーカーが規定された。
【0110】
物理的調節は、ウェハ調節デバイス16を介して、それぞれの全てのウェハ、ダイなどを、同一のx、y、およびθ位置に、これらの位置決めマーカーを探し、調節することによって、調節する、ウェハ試験プレート12を含む。使用において、このシステムは、これらのウェハ、ダイまたはそのサブセクションの全体の写真または画像を撮像し、そして特定の位置決めマーカーを探す。このシステムは、マーカーを見出すために、ハンティング法(hunting method)を使用する。一旦、1つ以上の特定の位置決めマーカーが同定され、そしてこのマーカーが予測とは他のいずれかの位置または配向にあることが見出されると、ウェハ試験プレート12が、並進または回転の様式で、x、y、およびθ方向に、このウェハ、ダイまたはサブセクションをスピンさせるか、ターンさせるか、調節するかまたはその他の様式で動かす。
【0111】
このシステムはまた、画像調節を実施し得る。工程A1の間に、別個の要素およびバッファが、画像調節において必要であるとして、規定された。
【0112】
この画像調節はまた、ソフトウェア調節とも呼ばれ得る。なぜなら、ウェハまたはダイを物理的に移動させるよりむしろ、ソフトウェアが実際に、撮像された画像を調節することによって、この調節を実施するためである。この画像調節は、各ダイのようなウェハの各セクション上で、良好なダイのモデリングおよび未知の品質のダイの検査のうちの一方または両方の最中に、実施される。このことは、しばしば必要である。なぜなら、撮像された各画像が、隣接する画像または別のウェハ上の共通する位置と比較として、わずかにずれ得るためである。画像配置の実際のプロセスは、基本的に、撮像された特定の位置の全ての画像が調節されていることを確実にする。すなわち、重ねた場合に、これらの画像の特徴が、オフセットまたはねじれを有するよりむしろ整列し、その結果、欠陥のみが目立つ。
【0113】
画像調節は、工程A3および/またはC5において必要とされて実施される場合には、画像をターンまたは移動させて「一致」させる(square up)ための起点となるダイ上の別個の要素を、カメラが探す工程を包含する。この別個の要素は、一般に、その欠陥が問題とならないほど十分に大きい要素である。この要素はまた、別個の形を有さなければならない。この別個の要素が、そこにあると予測された位置にある場合には、その画像がラインアップされ、そして画像調節は必要ではない;しかし、そうでない場合には、別個の要素が見出され、そして画像が調節されなければならない。
【0114】
画像調節における別個の要素のハンティングは、ダイ全体において実施され得る。しかし、これは高価であり、時間を浪費する。その結果として、手際のよい調節が代替的に実施され得る。
【0115】
手際のよい調節の場合には、バッファが画像内に規定される。このバッファは「小刻みに動かすこと(wiggle)」、すなわち画像の移動またはねじりが可能である。このバッファは典型的に、予測される移動のx量およびy量である。次いで、このバッファを使用して、別個の要素について検索されるべき別個の要素の予測された位置の周囲の領域を規定する。一旦、別個の要素が見出されると、その別個の要素が予測された別個の要素の位置から離れたxおよびyの距離は、画像を調節するためにその全画像が移動された、xおよびy方向の距離である。
【0116】
観察する工程は、ウェハW(既知の良好なウェハ)の画像を、カメラ20を使用して、プレート12を移動させてこのカメラを第一の画像(これは、全ウェハ、ウェハの一部、ダイ、またはダイの一部であり得る)と整列させることによって、収集する工程、ならびに次いでその画像を観察および記録する工程を包含する。その後、プレート12を移動させてカメラを別の画像と整列させる工程、この別の画像を観察および記録する工程、ならびにこれらの工程を、ウェハ上の全ての画像が観察および記録されるまで繰り返す工程が含まれる。代替の工程C8は、以下に記載のように、連続的な移動およびストロボ照射を包含する。それぞれの場合において、次いでこれは、複数の既知の良好なダイまたはウェハについて繰り返される。なぜなら、ウェハのプールを観察することが、良好なダイのモデルの形成のために必要であるためである。
【0117】
実際の欠陥検査のアルゴリズムは、「良好なダイ」のセットの画像の収集物から算出される。画像(単数または複数)が、良好なダイのセットのうちのそれぞれの良好なダイについて、撮像される。各画像は、画素(例えば、約1000×1000のアレイまたはグリッドの画素であるが、任意の数が使用され得る)から構成される。良好なダイの画像の全てにおける、各同一の画素に関して、すなわち、各共通のx,y座標(これは、画素である)に関して、平均および標準偏差が画素値において算出され、これは、この所与の画素のグレースケール値である。したがって、30の良好なダイのグループ化において、上述の実施例として使用されるように、各ダイが1000×1000のスポット(それぞれが画素と称される)(全部で百万のスポット)のアレイである場合には、1000×1000までの全ての、1×1、1×2、1×3などのx,y座標における各画素のグレースケールの数の、平均および標準偏差が、算出される;すなわち、平均および標準偏差が、画素1×1については30個全てのダイにおける画素1×1に対するグレースケール測定を使用して、などで、百万個のダイのそれぞれに関して算出される。
【0118】
1つの実施態様においては、各画素に対するグレースケールの数を使用して、平均および標準偏差を算出し、そしてこれらは一定の範囲内にある。1つの例は、256スケールスキームであり、ここでは、この256スケールスキームにおける0などの一端が、暗いかまたは黒色であるかあるいは影の付いた画像を表し、そして同一の256スケールスキームにおける255のような他端が、白色または影の付いた画像を表す。
【0119】
あるタイプのダイについて、全ての手段の集合体(全ての画素について)は、事実上、そのタイプの完全なダイであり、そして良好なダイモデルを本質的に規定する。あるタイプのダイについて全ての標準偏差の集合体は、感度およびフィルタリングについて以下に記載のように調節されたものとして、事実上、受容可能な範囲であり、その内側では、そのダイが良好であるとみなされ、そしてその外側では、そのダイに欠陥がある疑いがある。
【0120】
工程A4は、検査パラメータを設定する工程であり、これらのパラメータは、未知の品質のダイが良好なダイであると考えられるために良好なダイモデルにいかに近く一致しなければならないか(すなわち、正確なモデルからのどれだけの差異が、依然として良好なダイと考えれるために許容可能であるか)を、コンピュータシステム26に示す値である。このような検査パラメータのいくつかは、欠陥感度、最小欠陥コントラストおよび欠陥フィルタリングである。
【0121】
図示の実施態様においては、欠陥解像度は、光学的拡大に依存する。より高い拡大を選択すると、結果として、画像の視野がより小さくなる。選択される拡大により、複数の画像が単一のダイの検査のために必要とされるか、または多数の画像が、単一の画像に適し得る結果となり得る。ダイのサイズおよび光学的拡大は、工程A2において入力される。しかし、より小さな欠陥解像度は、結果として、1つのダイ当たりより多くの画像化をもたらし、したがって同じ品質のダイの欠陥検査のためにさらに時間がかかることが、留意される。あるいは、解像度が調節可能であるカメラが与えられ得、これによって、この調節特徴が、画像のサイズよりむしろ感度を制御する。
【0122】
欠陥感度には、上に記載のように既知の良好なダイモデルを規定するために算出される、平均および標準偏差の、ユーザーに規定される倍率が関与する。欠陥感度は、工程C7において、以下にさらに詳細に記載する。
【0123】
最小欠陥コントラストには、平均および標準偏差から規定される上限および下限における、ユーザーに規定される絶対的限定が関与する。最小欠陥感度もまた、工程C7において、以下にさらに詳細に記載する。
【0124】
欠陥フィルタリングには、統計的またはデータフィルタリングが関与し、面積、サイズ、問題の領域および/またはクラスター化フィルタリング、ならびに接続および/または減少因子フィルタリングが挙げられる。このフィルタリングによって、ユーザーは、十分なサイズまたは形の、あるいは他の点で受容可能であり、したがって欠陥としてラベルを付けられないことが所望される、重要な領域内のもの以外の、欠陥であることがわかった項目を、フィルタ除去し得る。図示の実施態様においては、欠陥フィルタリングは、各検査レシピまたはラウンドについて提供される。これによって、システムの性能が、ユーザーの応用のために最適化され得る。この欠陥フィルタリング特徴は、形、サイズ、x−y座標などのような欠陥の位置および形状の情報を使用して、その欠陥がオペレータによるさらなる評価および分類を必要とするかどうかを自動的に決定する。1つの例は、以下の通りである:特定のサイズより大きな任意の欠陥は、さらなる評価に供されない欠陥であると、ポジティブに決定され得る。さらにまたは代替的に、特定のサイズより小さな任意の欠陥は、「良好なダイ」モデルの範囲外にあったとしても、欠陥ではないとしてフィルタ除去される。また、工程D4の評価工程において、その間においてはオペレータの評価が必要とされる領域が、存在し得る。同様に、「良好なダイ」モデルからは異常な形、位置、構成、配置などがフィルタされ得る。欠陥フィルタリングは、以下にさらに規定する。
【0125】
工程A5は、この訓練モデルおよびその特徴、パラメータなどを、コンピュータシステム26に保存する工程である。
【0126】
全体的な検査レシピを作成する工程Bは、検査されるべき品目(すなわち、ウェハ、ダイなど)の各々のタイプに対する、検査レシピを作成する工程および保存する工程を包含する。莫大な数の検査レシピが、作り出され得、コピーされ得、そして編集され得、これによってユーザーは、検査プロセスをカスタマイズし得る。
【0127】
工程B1は、ウェハWがカセットまたは他の格納容器から選択される方法を規定する。工程B2は、欠陥検出のために各ウェハにおけるダイが選択される方法を規定する。工程B3は、欠陥検出マップファイルが入力され、そして出力される方法を規定する。工程B4は、このレシピを保存する。
【0128】
全体の検査工程Cは、欠陥検査と呼ばれ、半導体ウェハ検査のための高度な独自のデジタル画像解析技術である。このシステムは、工程A3において、上記するようにユーザー供給のセットの既知の良好なダイをまず調べた後に、ウェハ検査を実行する。この学習および検査する方法は、伝統的なテンプレートまたはモデル適合検査より強力である。既知の良好なダイにおけるランダム変化さえ、受容可能と決定され得ることは注目すべきであり、これは伝統的なテンプレートまたはモデル適合の場合にはあてはまらない。要するに、ウェハ検査へのこの確固たるアプローチは、疲労および他の問題なしに人間のオペレータに類似して機能する。
【0129】
工程C1は、所望であればウェハ識別コードを入力する。これは、各ウェハを後の欠陥の評価などのために識別するための方法を提供するため、ウェハマッピングが生じる場所が要求される。このウェハ識別コードは、英数字文字、バーコード、2−Dマトリックスコードなどの任意の公知の識別システムであり得る。
【0130】
工程C2は、工程Bで規定されたレシピを選択する。工程C3は、所望されるものであれば製品設定を選択する。
【0131】
工程C4は、ウェハをウェハ試験プレート12上に、ウェハ提供手段14を使用して装填する。このウェハ試験プレート上への装填は、マニュアル装填または、ウェハがその上のダイとともにカセットまたはマガジンから検査領域へ自動的に移送される自動システムの使用、であり得る。この自動システムは、全てのマニュアル操作の除去を可能にする。
【0132】
工程C5は、各および全てのウェハを同じx、y、zおよびθ位置に調節するために、ウェハ試験プレート12上のウェハを、ウェハ調節デバイス16を使用して調節し、そして工程A1で規定されたおよび/または訓練された調節機能およびパラメータを使用して調節する。これは上記に詳細が記載された。なぜなら、既知の良好なウェハを調節して良好なダイモデルを形成するために使用されたように、同様の物理的調節および画像調節のプロセスが、ここで使用されるためである。
【0133】
もしまだ焦点が合わされてなければ、カメラ20の焦点をウェハW上に合わせることが、しばしば必要である。これは、工程C5の間または工程C5の後に、必要であれば生じ、そして高さマップに規定されるウェハのz方向である。
【0134】
工程C6は、ウェハWの画像を、カメラを全ウェハ、ウェハの一部、ダイ、またはダイの一部であり得る第一画像と整列させるようにプレート12を動かして、カメラ20を使用して収集し、そしてその画像を観察し、記録し、そしてその後、プレート12を動かしてカメラを他の像と整列させ、この他の画像を観察して記録し、そしてこれらの工程をウェハ上の全ての画像が観察されて記録されるまで繰り返す。代替の工程C6は、以下に記載のように連続的な運動およびストロボ照射を含む。
【0135】
工程C7は、工程C6と同時的であり、工程A3の「良好なダイ」モデル、および工程A4の許容度およびパラメータに基づいて、観察される所与のダイ上の欠陥が位置する場所を決定する工程を含む。基本的に、未知の品質のウェハ上の各画素が観察され、それにより欠陥感度およびフィルタリングが「良好なダイ」モデルとともに使用されて、画素および/または任意のグループの画素が「良好」または疑わしいか決定する。
【0136】
初期的に異常または「良好なダイ」モデルと画像との間の差は、発見されそして次いで感知されフィルタされる。この決定を単純化するために、上部レベル値および下部レベル値が、各ダイ上の各画素のために、平均および標準偏差計算ならびにユーザー規定した感度および絶対限度に基づいて決定される。観察された画像は次いで、接続ファクタリング、減少もしくはノイズ削減ファクタリング、ならびに面積、サイズ、対象の領域などのしみ部(blob)識別に関する統計的またはデータフィルタリング、および/または相互作用性フィルタリングを含む1つ以上の種類のフィルタ技術を使用してフィルタされる。フィルタリングの後、疑わしい欠陥領域が確認される。基本的には、欠陥感度および最小欠陥対比が使用されて、一旦感度が考慮に入れられると、平均のいずれかの側の実際の調整された標準偏差である上部レベル値および低部レベル値を規定する。その後、フィルタリングは、しばしばより良く真の欠陥を識別するために使用される。
【0137】
1つの実施形態において、欠陥感度は、基本的にはユーザー規定した複数の標準偏差である。良好なダイおよび粗悪なダイの実際の分析を通して、ユーザーは最も正確に全ての欠陥を規定するが良好なダイを欠陥として間違って規定することがない、複数の標準偏差を規定する。例は次のとおりである。98、100および102のグレースケール値を有する3つの既知の良好なダイを仮定する。この平均は100であり、そして標準偏差は+/−2である。ユーザーは検査情報を介して、欠陥感度を5に規定する。この上限および下限はそれぞれ、次いで110および90であり得る。
【0138】
1つの実施形態において、この最小欠陥対比は、ユーザー規定の絶対限度に類似する。上記例において、情報を介したユーザーは、15の最小対比を有するグレイスケール測定は欠陥ではないことに気づく。この最小欠陥対比は、従って15に設定されそしてその結果、かわりに上限および下限は115および85にされなければならない。
【0139】
好ましい実施形態において、未知の品質のウェハまたはダイの各画素が観察された後、検査画像は、簡単な画像減算を使用して作製される。検査画像は、基本的に検査画素のグレイスケール測定値(例えばその画素に対して98)を、例えば110である良好なダイ上限から減算し、または例えば90である良好なダイ下限を、再び98である、検査画素のグレイスケール測定値から減算し、2値の良好または不良表示を得ることにより作製される。この上限および下限は好ましくは感知(sensitized)される。もしこの数が正であれば、この範囲内であるとして黒(あるいは白)に色づけされ、そしてもしこの数が負であれば、この範囲の外であるとして白(あるいは黒)に色づけされる。2値の白黒画像が得られる。この画像は、その簡単さのために、実際の256カラー画像を保存することと比較してよりいっそう迅速な速度でフィルタリングすることを可能とする。あるいは、256色などのフルカラー画像が、充分なメモリが利用可能であり、そして最適速度が重要ではない場合、使用され得る。
【0140】
1つの実施形態において、1つ以上の続くフィルタが2値の白黒画像上に使用される。接続ファクタリングおよび減少ファクタリングなどの画像処理機能が次いで個別にまたは一度に使用され得る。しみ部識別に関する統計的フィルタリングまたはデータフィルタリングもまた、個別にまたは一度に実行され得る。
【0141】
接続ファクタリングは、「閉」操作を含む。この識別された画素、上記の例では白色のものは、拡張されそして次いで衰退され(eroded)、または二倍に拡張され次いで衰退され、あるいは任意のほかの公知の組み合わせである。これは、小さい欠陥または受容可能な凹凸を除去する(filter out)ために、欠陥を接続しまたは充填する。
【0142】
減少ファクタリングは、「開」操作含む。この識別された画素は衰退されそして次いで拡張され、または二重衰退され、そして次いで二重拡張され、あるいは任意の他の公知の組合わせである。これはノイズを減少させる。
【0143】
しみ部分析は、2値の白黒画像のしみ部を識別する工程を含む。一旦認識されると、例えば、xサイズおよびyサイズなどのサイズ、位置、領域などを含む、様々な各々のパラメータが識別される。統計的フィルタリングまたはデータフィルタリングは、次いでこのしみ部のパラメータ上で実行される。
【0144】
このような統計的またはデータフィルタリングは、領域フィルタリング、サイズフィルタリング、対象の領域フィルタリング、および相互作用性欠陥分類フィルタリングを含む。領域フィルタリングは、所定の領域またはそれより小さいしみ部を捨てる。サイズフィルタリングは、所定のxまたはyサイズまたはそれより小さいしみ部を捨てる。対象の領域フィルタリングは、ユーザーがあまり重要ではない、または何ら重要ではないダイ上の位置を規定することを可能とし、そしてそのようにすることにより、任意のその上の欠陥を無関係とする。最後に、相互作用性の欠陥分類は、近接(ここで近接を規定する距離はユーザー規定である)するが接触していない識別される画素のクラスタ形成を含む。
【0145】
基本的には、未知の品質のダイが画像を観察し、そして各画素を上限値および下限値を介して、その平均および標準偏差と比較することにより検査される。感度およびフィルタリングもまた、ユーザーにより多かれ少なかれ重要とされるファクターに対する補償を可能にする。つまり、未知の品質のダイにおける所与の観察される画素の任意の1つが、感知されてフィルタされるとき上限値および下限値の外側にある場合、このダイは欠陥性であり、そして以下に記載するように、その欠陥スポットがインク付けされ、または他の方法で書き留められる。
【0146】
この工程C8は、全てのダイの全ての欠陥データの集成であるウェハWの欠陥マップを作製し、そしてデータファイルに格納される。好ましい実施形態において、これは2値の白黒画像である。
【0147】
上記の検査工程への代替として、代替の工程C6は、ウェハ上の全てのダイ上を走査するために、連続的にプレート12を動かすことによりカメラ20を使用してウェハWの画像を収集する工程であり、それによりこのウェハはストロボライトにより、移動プレートに相関するシーケンスで照射され、各ダイはカメラ20の下で正確な時間でストロボされる。基本的には、移動プレート上の光の短い照射パルスは、画像を効果的に「フリーズ」させる。これはカメラを第一のダイと整列させるための停止および作動手順を必要とすることなく、画像の連続的収集、観察およびそのダイの記録を可能にし、そしてプレート12を動かしてカメラを他のダイと整列させ、この他のダイを観察して記録し、そしてこれらの工程をこのウェハ上の全てのダイが観察されて記録される、等まで繰り返す。
【0148】
全ての欠陥評価工程Dは、一般に所与のウェハWの欠陥検査の終了においてである。というのはこの点において欠陥分類がしばしば所望されるからである。この工程Cの欠陥検査または検出プロセスは、全て自動化され迅速であり、それにより一旦終了するとユーザーは、欠陥のための全てのダイまたはウェハでなはく、手作業でパラメータ、フィルタ、感度などに基づき発見された欠陥のみを、検査し得る。かなりの時間が節約される。
【0149】
工程D1は、工程C9で作製された欠陥マップを装填する。工程D2は、評価する欠陥を選択する(あるいはウェハ上のすべての欠陥を順に評価する)。工程D3は、プレート12を動かし、特定の欠陥がカメラ20の下で適切に配置されるようにウェハWを位置決めさせる。工程D4は、欠陥のユーザー観察工程および分類工程であり、システム10のユーザーが、観察された欠陥を観察し、そして分類するようにする。任意の数の分類が可能であり、そして分類はユーザー規定である。工程D5は、全ての欠陥が評価されそして分類されるまで、工程D2〜D4の繰り返しである。工程D6は、分類した欠陥マップを保存する工程、および代替的に、または追加的に欠陥情報を、データベースまたは他の管理および評価のための任意の数の他のフォーマットで、保存する工程である。
【0150】
全体の欠陥報告工程Eは、データベースフォーマットに格納されたデータを出力する工程またはプリントアウトする工程である。このデータは、次いで分析され得、または欠陥のタイプ、欠陥の頻度、欠陥の位置などの統計的分析または他の分析を実行するために他の方法で使用され、これはウェハWのメーカーにとって有用であり、メーカーが欠陥搭載領域に集中することを可能にする。この工程Eは、グラフィック、表形式、および実際の画像ディスプレイを含む複数のフォーマットでデータを報告するので完全なそして効果的なデータ分析を提供する。表形式フォーマットに配置されたデータは、数値が電気的フォーマットなどの他の値と容易に相関することを可能にする。グラフィカルデータ表示は、そうでなければ見ることが困難なトレンドを迅速に表示する。
【0151】
システム10は、Pentium(登録商標)Proまたは類似のコンピュータプラットフォームなどの標準的なコンピュータ技術に基づき、例えば直列形式およびネットワーク形式の両方の多くの異なる通信オプションを可能にする。例えば、このシステムはTCP/IP構成を含み、そしてあるいは、SEC−II/GEMまたは他のコンピュータ産業標準プロトコルを含み得る。
【0152】
システム10は、ドリフトマップを使用して検査を実行するためにもまた使用され得る。これは、ウェハWの個別のダイがフィルム上で裁断され、そしてそこから拾い上げて除去するために必要に応じて延ばされる場合に有用であり、これは周知技術である。ここでの問題は、このフィルム材料は不均一に伸張するため、伸張の間、直交性が損失され得、そしてダイが異なる方向に動くことである。ほぼ正方形または矩形の切断ダイは、今度は全ての異なる方向に配向され、そしてこのようなダイの列は、もはや直線状ではなく、むしろ波うった、または他の態様で方向性が無い。この大きい伸張と直交性の損失が生じると、ドリフトマップおよびドリフト工程が、これを補うために加えられる。この工程は典型的にはスキャニングの前に挿入される。
【0153】
1つの実施形態において、フレームグリッドが各ダイの考えられる配置を規定する目的のために作製される。隣接のダイを損傷させることなく、各ダイを拾い上げることをより容易にすることを可能にするために運ばれたフィルム切込みウェハを、伸張することは公知である。しかしこの伸張工程は、典型的には均一ではなく、方向性が無いダイをもたらす。このドリフトマップは、各ダイの伸張された位置を、切り込みの前の剛性、およびピッチのために既知であるダイの開始点を使用して予測する。
【0154】
ドリフトマップを作製するために、マークまたはダミーダイがウェハ上にn番目ごとに(例えば10番目ごとに)配置される。機械の視野を使用して、システム10は、マークをその考えられる位置において探し、そして次いで見つからない場合はその回りを見る。一旦、実際の位置が見つかると、この機械視野は、次のマークの考えられる位置へ進み、そしてこのプロセスを反復する。一旦全てのマークが見つかると、マークの間の一貫した性質を仮定してピッチが計算される。このピッチを使用して、そして切込みの前に各ダイのもとの位置を知ることにより、このダイの位置を正確に予測するドリフトマップが作製される。
【0155】
システム10は、自動焦点機能の使用もまた取込み得る。このような機能は、画像の走査が各所定の画像点において行われる場所での鮮明度計算に基づく。その後、鮮明度計算は、正確な焦点を見つけるために使用される。時間を節約するために、これはn番目ごとの画像のみにおいて行われ得る。
【0156】
要するに、操作の基本的な手順は、自動化ウェハ移送およびウェハマッピングオプションを除いて、次のようである。オペレータまたはユーザーは、「良好なダイ」は何かに関して、このシステムをまず訓練しなければならず、すなわち良好なダイモデルを作成するか、または既存の良好なダイモデルを選択する。上記のように、これは、正確な同じx,y,zおよびθ位置から、適切に複数の既知の良好なダイが画像化されるように各ダイを整列するために、位置マーカーを入力および使用する工程を含む。加えて、ウェハおよび/またはダイ形状、サイズ、ピッチ、行の数、列の数などは良好のダイの画像化の前に入力されなければならない。複数の良好なダイは次いで、それぞれ整列され、そしてCCDカメラにより観察され、その結果コンピュータシステムが、共通の性質をグルーピングすることにより、ピッチ、色、角度、位置などの範囲を注目することにより「良好なダイ」モデルを次いで形成する。基本的にシステム10は、ユーザー提供の良好なダイの既知の設定を見ることにより、ウェハ検査を実行する。一般に、少なくとも20または30のダイが提供されることが好ましいが、最小限または最大限は必要とされない。検査パラメータはまた、未知の品質のダイが良好なダイとされるためには、「良好なダイ」モデルの特定の特性にどれくらい近接して、適合しなければならないか、を表示するために設定される。これらは、感度パラメータおよび欠陥フィルタを含む。
【0157】
ユーザーはまた、事前に格納された検査レシピを作製または選択しなければならない。これには、ウェハWがどのようにカセットまたは他の格納容器から選択されるか、どのように各ウェハWの各ダイ上に欠陥検査のために選択されるか、どのように欠陥検査マップファイルが入力されおよび出力されるか、などに関する情報が含まれる。
【0158】
システム10は、今度は未知の品質のダイを検査する準備ができる。ウェハマッピングが活性化される場合に、必要な識別コードが使用されるならば、この点において、入力されなければならない。その後、ウェハW(または切込みウェハ、またはゲルパックのダイ、またはワッフルパックのダイなど)は、検査領域、特にウェハ検査プレート12(これは検査カメラの下にある)に配置される。これは、ウェハ提供手段14を使用して達成される。工程A1で規定されたおよび/または訓練された調節機能およびパラメータを使用して、「良好なダイ」が装填されているので、その後、ウェハ調節デバイス16が、ウェハを同じx、y、zおよびθ位置において整列させる。所望される拡大は、次いで選択され、そしてその後カメラ20が焦点化される。
【0159】
このシステムは今度は、ウェハWの選択された領域(第一ダイ位置)の画像を、第一ダイ位置などの選択された領域とカメラ20を整列させるためにプレート12を動かすことにより、カメラを使用して、収集するが準備でき、その結果、全ウェハ、ウェハの一部、ダイ、またはダイの一部であり得るその第一画像を撮り、そして次いでその画像を観察して記録する。自動化欠陥検査およびボンドパッド(bond pad)分析が、このダイのデジタル画像について実行される。もしこのダイがインク付けされていれば、これは自動的に「インク付けされたダイ」として識別(マッピング)される。もしこのダイがイン
ク付けされていなければ、そして欠陥が発見されなければ、そのときはこのシステムは、ダイ上の欠陥位置、サイズ、形状などの各欠陥についての詳細情報を収集および格納する。
【0160】
プレート12は、次いでカメラを他の選択された領域(これは次の隣接する、または隣接しない領域であり得る)に整列するために動かされ、第一画像に隣接する、その画像(第二ダイ位置)をウェハ上で撮る。基本的に、このプレートは、検査カメラの下で次のダイ位置へインデックス化される。この第二ダイ位置が次いで観察され記録される。これらの工程は、ウェハ上の全ての画像が観察され記録されるまで繰り返される。これらの画像観察工程と同時に、欠陥感度およびフィルタリングが、「良好なダイ」モデル観察に関連して使用され、最初の異常または「良好なダイ」モデルとこの画像との差が、実際の欠陥かどうか、またはこれらがフィルタ除去されるべきかどうかを決定する。ウェハWの欠陥マップは次いで、コンピュータシステムにおいて、その上に発見された全ての欠陥を含む、全てのダイの全ての欠陥の収集から作製される。
【0161】
他の実施形態においては、漸進的な工程でプレートを動かすのではなく、このプレートは、そのストロボ照射の間連続的に動かされる。このウェハのセクションは、次いでカメラが移動基板の各セクションの上を適切に位置されるとき、カメラをストロボ照射と同期させることにより走査され、ストロボ照射がこのカメラを介する画像収集と同時に生じる。
【0162】
所与のウェハW上の欠陥検査の終了において、欠陥分類がしばしば所望される。各記録された欠陥は、特定の欠陥が位置するウェハW上の位置へ、プレート12が動かされた場所で、ユーザーにより人手で評価されるので、ユーザーは、この欠陥を観察しそして分類し得る。これは次いで、全ての欠陥について繰り返される。この分類された欠陥は、次いで分類された欠陥マップとして保存される。
【0163】
そのウェハは次いで除去され、そして他のウェハが検査のために装填される。この除去および新規の装填は、人手により行われるか、または自動的に実行され得るかのいずれかである。
【0164】
従って、本発明は上記および当業者により理解されるように、簡単化され、効率的で安全な安価なそして効果的なデバイス、システム、方法を提供し、これらは挙げられた目的の全てを達成し、従来技術のデバイス、システムおよび方法で遭遇する困難の除去を提供し、そして問題を解決し、この分野における新しい結果を得る。
【0165】
前述の記載において、特定の用語が簡単、明瞭、および理解のために使用されたが、このような用語は説明の目的のために使用され、そして広く意図されるように理解されるから、不必要な限定はそこから従来技術の要求を超えては意味しない。
【0166】
さらに、本発明の記述および図示は、例示のためであり、本発明の範囲は、示されたまたは記載された正確な詳細には限定されない。
【0167】
本発明の機能、発見および原理、本発明が理解されそして使用され態様、この構成の特徴、および有利な、新規な、そして有用な得られた結果について記載したが、新規なそして有用な構造、デバイス、要素、配列、部品、および組み合わせは、添付の特許請求の範囲に記載される。
【0168】
本発明の好ましい実施態様、出願人が原理を適用することを意図する最良の様式の図は、以上の説明に記載され、図に示され、特に明確に指摘され、添付の特許請求の範囲に記載される。
【0169】
同じ番号は、図面全体を通して同じ部分を示す。
【特許請求の範囲】
【請求項1】
本願明細書に記載の発明。
【請求項1】
本願明細書に記載の発明。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【公開番号】特開2013−68633(P2013−68633A)
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願番号】特願2012−276774(P2012−276774)
【出願日】平成24年12月19日(2012.12.19)
【分割の表示】特願2010−106007(P2010−106007)の分割
【原出願日】平成11年7月15日(1999.7.15)
【出願人】(501018841)オーガスト テクノロジー コーポレイション (9)
【Fターム(参考)】
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願日】平成24年12月19日(2012.12.19)
【分割の表示】特願2010−106007(P2010−106007)の分割
【原出願日】平成11年7月15日(1999.7.15)
【出願人】(501018841)オーガスト テクノロジー コーポレイション (9)
【Fターム(参考)】
[ Back to top ]