
自動固相マイクロ抽出(SPME)サンプリング装置
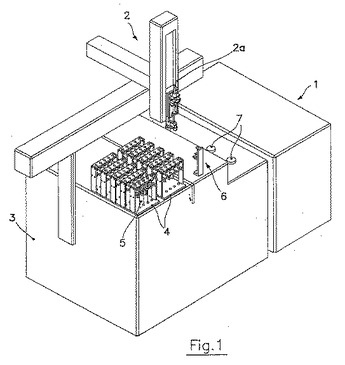
固相マイクロ抽出(SPME)ファイバ9を保持するプローブ5のためのホルダ15を有する可動サンプラー・アーム2と、プローブ格納トレイ4およびガスクロマトグラフィ注入器7の間でプローブ5を搬送するための中間ブラケット6とを有する自動SPMEサンプリング装置。種々のプローブ・ハンドリング段階において、プローブは、ホルダ15のプランジャ17の端部、ホルダの本体16の自由端部、およびプローブ針8を誘導するブロック29bの下側端部に取り付けられた磁性手段20、22、33により回収される。プローブを搬送ブラケット6上に配置するため、またはプローブを搬送ブラケット6から取り除くために、磁性手段は、SPMEファイバ9の一端部に取り付けられた強磁性コネクタ12、およびファイバを収容する針8の端部に取り付けられた強磁性フランジ13と相互作用する。装置は、全自動方式で、既に暴露されたSPMEファイバに関して分析を実施すること、サンプルから分析物を抽出すること、およびその後ガスクロマトグラフにおける脱離のために分析物を搬送することが可能である。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、広義には、化学分析用、特にガスクロマトグラフィ装置によって実施される化学分析用の計測器の分野に関するものである。特に、本発明は自動固相マイクロ抽出(SPME)サンプリング装置に関するものである。
【背景技術】
【0002】
公知のように、固相マイクロ抽出(SPME)は、流体ポリマ相、固体吸着剤、または両者の組合せが固定された溶融シリコン・ファイバを使用する分析方法である。コーティングされたファイバ(以降、SPMEファイバと称する)は液体サンプルまたはサンプルの上のヘッド空間内に浸されて対象となる分析物を吸着し、この分析物はその後ガスクロマトグラフ注入器内で熱を使用して脱離され、キャピラリ・カラムに搬送される。方法の選択性は、ファイバをコーティングする相タイプまたはその厚さを変更することによって変えることができる。この分析方法は種々の分野で普及してきており、生物学的分析および環境分析のため、毒物学のため、ならびに農業食品分野で使用される。
【0003】
SPMEユニットは本質的に2つの部分からなる。1つは、一端においてプラスチック・コネクタに取り付けられた被コーティング溶融シリコン・ファイバであって、他端の暴露を可能にするように針内に摺動可能に収容される被コーティング溶融シリコン・ファイバからなるプローブであり、もう1つは、実質的に注射針のように見える管状容器であって、ファイバのコネクタがねじ込まれるプランジャを備えた管状容器である。プランジャの摺動動作によって、ファイバの多くの部分または少しの部分が針から延び、あるいは針の内部に引っ込む。分析物は、ファイバのコーティングされた部分を試験管のヘッド空間内で暴露することによって、またはファイバのコーティングされた部分を流体(例えば水、牛乳、果物ジュース、ワインなど)内に浸すことによって、またはファイバを(空気浮遊汚染物質の濃度が測定される必要がある作動環境内の)空気に暴露することによって、抽出されることができる。
【0004】
3つのタイプのプローブ容器(以降、ホルダと称する)、すなわち手動分析用ホルダ、現場試験用ホルダ、および自動サンプラー用ホルダ(オートサンプラー)が入手可能である。オートサンプラーは、ロボット・アームを備えた公知の装置であり、ロボット・アームは、分析物を抽出(サンプリング)してそれをガスクロマトグラフ内に注入する操作を自動的に実施することを可能にする。その一方で、ペレータは、コーティングされたファイバを交換する必要が生じるたびに、検査する化合物の等級に応じて処置を講じなければならず、これは、異なる相が固定されたファイバを必要とする場合がある。そのような場合、分析するサンプルは、ロボット・アームのサンプリング・ヘッドにアクセス可能な適切な支持プレート内に挿入された試験管内に収容されることができる。
【0005】
SPME法を使用すると、オートサンプラー・アーム上に設置されたプローブを変更する必要があるときはいつでも、オペレータは処置を講じなければならないため、抽出/注入手順の自動化は制限される。さらに、ガスクロマトグラフ内へのそれぞれの注入後にプローブを交換しなければならない状況が存在する。例えば所与のサンプリング・キャンペーン中、サンプルを回収するよう任命された技術者が、監視する環境にファイバが暴露された多数のプローブを持って試験所に戻る可能性があるとき、空気浮遊汚染物質を判定するために自動化分析は適していない。このタイプの分析では、ファイバの数は、監視するエリア内の選択されたサンプリング地点の数、およびそのエリアで作業する人の数に依存する。2つ以上の汚染物質に対する職員の暴露を評価するために、作業者の衣服に1つまたは複数のプローブが取り付けられてもよい。
【0006】
環境分析では、各SPMEプローブは、オペレータがサンプルをガスクロマトグラフ内に注入することができる前にホルダ内部でその時常に変えなければならない試験管と同等のものである。市場で現在入手可能なホルダを使用すると、SPMEファイバは、一部のオートサンプラーに関して使用することができるが、いくつかのファイバは、オートサンプラーが停止され、そしてプローブを変えるためにオペレータが手近にいなければ、単一作業セッションで同時に使用することができない。さらに、各ファイバが所与のサンプリング地点を表す環境分析において、時間節約の観点から、分析物を手作業でポートを通して注入することと、オートサンプラー内のホルダ内にファイバを設置することとの間に、差が存在しない。これは、例えば2つの物質がそれに関して検査されなければならず、且つ2つの異なるSPMEファイバの使用を必要とする2組のサンプルが存在する場合に、第1組のサンプルは最初に分析されなければならず、次いで第2組のサンプルを分析する前にファイバを変えなければならないため、SPME法の重大な欠点を示す。この問題は、液体サンプルまたは生物学的サンプルの検査においてすでに重大なことであるが、環境サンプリングの場合にさらに増幅され、このとき、完全な自動処理の欠落は、分析を実施するのにかかる時間をかなり延長させる。
【発明の開示】
【発明が解決しようとする課題】
【0007】
本発明の目的は、オートサンプラー・アーム上のSPMEプローブの自動交換を可能にする、固相マイクロ抽出(SPME)で使用するための自動サンプリング装置を提供することである。
【0008】
本発明の別の目的は、いくつかのさらなるコンポーネントを単に付加することによって、既に使用中のサンプリング機器に容易に一体化することができる方法で、オートサンプラー・アーム上のSPMEファイバを変更することを可能にする上述したタイプの装置を提供することである。
【0009】
したがって本発明の別の目的は、従来の半自動オートサンプラーを、本発明による全自動装置に変換するために必要なコンポーネントを含むアダプタ・キットを提供することである。
【0010】
本発明のさらなる目的は、上述したタイプの自動サンプリング装置で使用するのに適したSPMEプローブを提供することである。
【課題を解決するための手段】
【0011】
これらの目的は、その主要な特徴が特許請求の範囲の請求項1、請求項10、および請求項15に記載されている本発明による自動固相マイクロ抽出(SPME)サンプリング装置によって達成される。
【0012】
さらなる重要な特徴は、従属請求項に記載されている。
【0013】
本発明による自動固相マイクロ抽出(SPME)サンプリング装置の他の特徴および利点は、添付図面を参照して、非制限的な実施例として本明細書で示される本発明の実施例の以下の説明から明らかになるであろう。
【実施例】
【0014】
本発明による装置は、包括的に数字1で示されるガスクロマトグラフィ分析用の検出器(例えば質量分析器)に関連して図1に概略的に示されており、またガスクロマトグラフによって支持されるロボット・オートサンプラー・アーム2を有している。このガスクロマトグラフ上には、SPMEファイバを収容するプローブ(数字5によって示す)を支持する1または複数のトレイ4が整然と配列されている。これらのプローブは、例えば環境分析のキャンペーンからもたらされたものであってもよく、ガスクロマトグラフィ分析できる状態にある。トレイ4に並んで、後でより詳細に述べられるプローブ5を搬送するブラケット(包括的に数字6で示す)が存在する。数字7は、ガスクロマトグラフィ装置の2つの注入器を示す。
【0015】
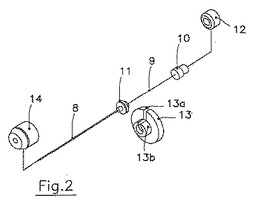
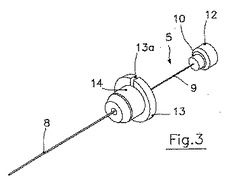
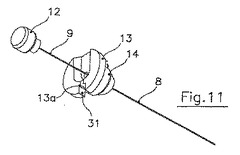
図2および図3を参照すると、本発明によるサンプリング・プローブ5は、SPMEファイバ9を摺動可能に収容する針8からなる従来のプローブを有している。プラスチック・コネクタ10がファイバ9の一端に取り付けられており、これは従来のシステムではプローブ・ホルダのプランジャにねじ込まれる。真鍮スペーサ・リング11が同様に針8の隣接端に取り付けられる。強磁性材料でできたアダプタ・キャップ12がコネクタ10に取り付けられ、一方、同様に強磁性材料でできたフランジ13がスペーサ・リング11に固定される。特に、フランジ13は、半径方向不連続部13aおよび外と内の両方にねじを切った部分13bを有する。スペーサ・リング11上にフランジ13を組み立てるために、針8は、フランジ13に同軸になるまで不連続部13aを通過させられ、フランジ13は、そのねじを切った部分13bによって、スペーサ・リング11上にねじ込まれ、ついには両者が並置される。その後、固定スリーブ14が、針8に同軸に、ねじを切った部分13bにねじ込まれる。
【0016】
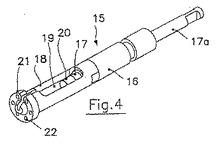
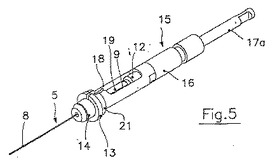
図4および図5に示すように、数字15は、SPMEファイバ9を有するプローブ5を保持するために、サンプラー・アーム2のヘッド2aに取り付けるのに適した実質的に従来の構造のホルダを示す。ホルダ15は、プランジャ17を摺動可能に収容する管状本体16を有し、プランジャ17のステム17aは、当業者によく知られているタイプであるために図示されない移動式デバイスに接続される。ホルダ15の本体16は、針8が本体16から軸方向に延びるように、図5に示すように、移動中にプローブ5を収容するチャンバ19にアクセスすることを可能にする長手方向窓18を有する。特に、磁石20は、チャンバ19内部のプランジャ17の端に取り付けられ(図4)、同様に、円形に配列された磁性要素22の列を保持するフランジ21は、本体16の自由端に取り付けられる。フランジ21と本体16の自由端は共に、半径方向不連続部を有し、(図5に示すように)プローブ5がチャンバ19内部に設置されるか、またはチャンバ19から取り外されるときに、針8の通過を可能にする。図5に示す状態では、プローブ5は、2つの磁性接続によってホルダ15に固定され、この2つの磁性接続は、一方の側面で、プランジャ17の端に位置する磁石20に取り付けられるアダプタ・キャップ12からなり、そして他方の側面で、本体16の自由端に位置する磁性フランジ21に取り付けられるフランジ13からなる。
【0017】
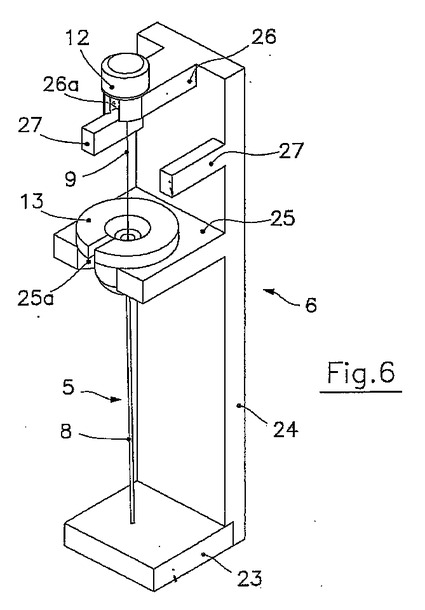
図6に示すように、SPMEファイバを保持するプローブ5を搬送するためのブラケット6は、装置のケーシング3に固定することができるベース23およびベース23から立ち上がる直立部24を有する。第1および第2の支持プレート25および26は、直立部24からベース23の上に延び、それぞれの座25aおよび26aにおいて、SPMEファイバ9を保持するプローブ5上のアダプタ・キャップ12およびフランジ13に係合することを意図されている。第1および第2の支持プレート25と26との間には、後で説明されることになる目的で、一対のアーム27も、直立部24から延びる。
【0018】
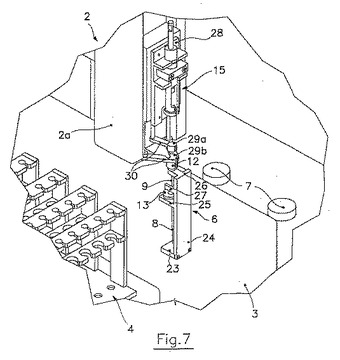
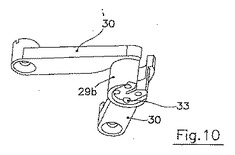
図7に示すように、ホルダ15はプレート28によってオートサンプラー・アーム2のヘッド2aに実質的に従来の方法で固定される。オートサンプラー・アーム2のヘッド2aはまた、プローブ5の針8を誘導するためのホルダ・プレート28の下で整列した2つのガイド・ブロック29a、29bであって、前記プレート28から延びるアーム30によって支持された2つのガイド・ブロック29a、29bを備える。さらに、図10に示すように、数字29bによって指示される、2つのガイド・ブロックの下側部分は、SPMEファイバ9上のアダプタ・キャップ12に磁気的に結合することができるようにその下面に円形に配列された磁石33の列を保持する。
【0019】
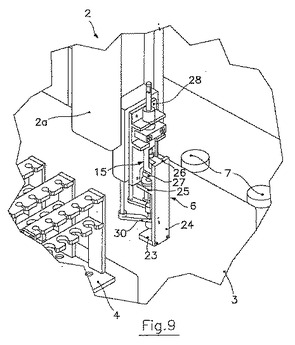
本発明による装置の動作は、図7、図8、および図9を特に参照して以下で述べられる。最初に、(例えば環境分析のキャンペーンからもたらされた)プローブ5がトレイ4内の適したラックに垂直に設置され、この時サンプラー・アーム2のヘッド2aは図1に示す静止位置にある。サンプラー・アーム2は、コンピュータ(図示せず)によって制御されるデカルト(直交座標)・タイプの移動を特徴とし、コンピュータには、各プローブの位置を有するトレイ4のマップが記憶され、それによりサンプラー・アーム2はトレイ4上のプローブ5の上の位置に移動し、必要とされるプローブ5の上でガイド・ブロック29a、29bを整列させることができる。その後、下方移動が始まり、ついには下側部分ガイド・ブロック29bが、前方に置かれたプローブのアダプタ・キャップ12に磁気的に係合し、このプローブはその後トレイ4内の座から持ち上げられ、搬送ブラケット6まで運ばれることができ、搬送ブラケット6において、プローブは、アダプタ・キャップ12およびフランジ13が支持プレート26および25に載るようにそれぞれの座26aおよび25aに設置される。ガイド・ブロック29bの端は、ガイド・ブロック29bを搬送ブラケット6から離れるように長手方向に摺動させることによってアダプタ・キャップ12から分離される。キャップ12は、キャップ12から突出するプラスチック・コネクタ10によって座に維持され、またブロック29bが搬送ブラケット6から離れるように移動した時に外れ、もはやブロック29bの磁石はキャップ12に接触しない。
【0020】
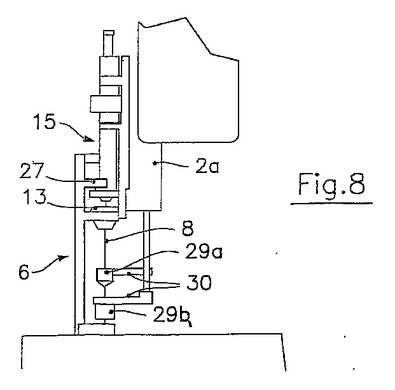
ガイド・ブロック29bがプローブ5から分離されると、アーム2のヘッド2aは、ホルダ15内の窓18をアダプタ・キャップ12に整列させるために下に移動する。ヘッド2aのその後の前方摺動移動は、ホルダ15を直立部24の方に移動させ、ついには、図8および図9に示すように、アダプタ・キャップ12が、ホルダ15内のチャンバ19内部にあるようになる。
【0021】
その後、プランジャ17は、その磁性端20をアダプタ・キャップ12にぶつからせ、アダプタ・キャップ12は磁性端20に取り付けられたままになり、その後、アーム2上のヘッド2aは、磁性フランジ21を針8上のフランジ13に接触させるように移動する。こうしてプローブ5はホルダ15にしっかり取り付けられ、その結果搬送ブラケット6から分離され、針8が最終的に係合する注入器7の方へ運ばれることができる。最終ステージにおいて、針8はまた、ガイド・ブロック29a、29bに係合して、ガスクロマトグラフ注入器7への挿入中に針8が曲がることを回避される。
【0022】
針8が注入器7に挿入されると、プロセスは通常の方法で続く。針8内のファイバ9は、分析する物質の脱離を可能にするために暴露され、必要な時間が経過したとき針8は注入器7から引き出され、プローブ5は搬送ブラケット6に戻され、図9に示すように再位置決めされる。プローブは、磁石20がアダプタ・キャップ12から分離するまでホルダ内のプランジャ17を持ち上げることによって外れ、そのとき、プランジャ17は、窓18の一番上に隣接している。その後ホルダは、フランジ13がアーム27に突き当たるまで、磁性フランジ21とフランジ13との間の磁気力に打ち勝つのに十分な力でプローブを上方に引き上げ、それによってプローブ5は、キャップ12およびフランジ13がプレート26および25内のそれぞれの座26aおよび25aに嵌合するまで、ブラケット6を下方に自由降下する。その後、先に述べたサンプル回収ステップが逆順で行われ、したがってプローブ5はトレイ4内のその座に復帰し、オートサンプラー・アーム2はいつでも新しいプローブ5を回収することができるようになる。
【0023】
本発明によれば、プローブを回収するための可動サンプラー・アームに関して本質的に2つの異なる方法が存在する。第1モードは、プローブが、ガイド・ブロックの下端29bに磁気的に取り付けられるアダプタ・キャップ12によってアームのヘッドに接続されることを含み、これは、搬送ブラケット6へのプローブの位置決めおよび搬送ブラケット6からのプローブの取り外しを可能にする。第2モードは、プローブが、プランジャの端17aおよびホルダ15の本体16の自由端にそれぞれ磁気的に取り付けられるアダプタ・キャップ12およびフランジ13によってホルダ15に接続されることを含み、これは、搬送ブラケットからホルダへのプローブの搬送および前記ブラケット内へのその後の再挿入を可能にする。可動アーム2の移動および搬送ブラケット6の存在による、1つの回収モードから他の回収モードへの移行は、複数のサンプルを分析する手順が、完全に自動化されることを可能にする。
【0024】
本発明による装置は、有利には、既に暴露されたSPMEファイバを収容したプローブを使用して分析を実施するためだけではなく、トレイ内に設置された試験管内に収容されたサンプルからの対象となる分析物の直接抽出、およびガスクロマトグラフ内でのその後の脱離にも使用することができる。この場合、上で説明したことに照らして、当業者に自明であるシーケンスによれば、まだ暴露されなければならないプローブ5を保持しているオートサンプラー・アームのヘッド2aは、トレイ4内の所与の試験管の上に運ばれ、プランジャ17をホルダ15内で摺動させることによって針を試験管内に挿入する。ここで再び、針8は2つのガイド・ブロック29a、29bに係合され、それによって、試験管内への針の挿入中にプランジャによって針に加えられる力による針の曲げのいかなるリスクも回避される。SPMEファイバは、必要とされる時間の間試験管内部で暴露されると針内部に引っ込められ、針は試験管から取り外され、その後プローブはガスクロマトグラフ注入器に搬送され、ガスクロマトグラフ注入器にてプローブが挿入され、脱離相が始まる。
【0025】
検査すべき分析物が、異なる等級の化合物に属し、その結果、異なる相を有するファイバを必要とする場合、本発明による装置は、以前に使用したプローブを脱離した後にトレイ4から未暴露プローブを回収して、適切な未暴露プローブを自動的に装備することができる。切換えは、先に述べた方法で、搬送ブラケット6を使用して行われる。
【0026】
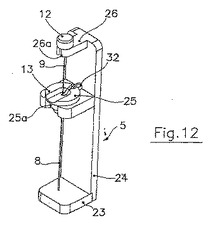
上述した実施例では、プローブのフランジ13は、生じる力がフランジ13とフランジ21との間の磁気力を超えるまで一対のアーム27に当たるように押し付けられ、それによってプローブ5がアーム27によってフランジ21から外される。図11および図12に示す代替の実施例では、プローブ5は、同じ方法でガイド・ブロック29bから外され、この時フランジ21は、針8から離れるように垂直方向にヘッド2aによって加えられる単純な牽引力によってフランジ13から分離される。この目的のために、針8を挿入するためのフランジ13上の半径方向不連続部13aは、広い開口セクション31を有している。前記広い開口セクション31に係合するために、搬送ブラケット6のプレート25上に対応する基準歯32が存在し、それによりプローブは、搬送ブラケット上の一定位置に維持される間、プローブが摺動して外れるリスクが無い状態で、半径方向牽引力によって外されることができる。これは、フランジ13およびアダプタ・キャップがそれぞれの座に横方向から当接するためである。この解決策はまた、プローブを搬送ブラケット上に落とすことによるプローブの位置決めを回避するものであり、この位置決めはプローブに損傷を与える可能性があった。
【0027】
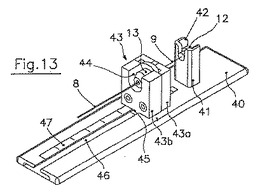
図13は、プローブを較正するときに使用するため、すなわちファイバが針内部に引っ込められる範囲(通常Zとして示す)を調整するための、本発明による装置用の有用な付属品を示す。このパラメータは、ファイバの暴露の範囲およびその結果のサンプリング・レンジを決定する。デバイスは、長手方向中間位置に固定された第1座42であって、プローブ上のアダプタ・キャップ12を収容するように形作られた第1座42を有する第1ブロック41、ならびに2つの結合した部分43aおよび43bであって、それらの間にプローブ上のフランジ13を収容する第2座44を画定し、且つフランジ13の第2座44内での軸方向の摺動を防止するように形作られる部分43aおよび43bからなる第2動ブロック43を有するプレート40を有する。2つのブロックの少なくとも一方は、プレート40上に長手方向に形成された対応する形状のスロット46内部に係合するT形状付属物45を有する。アダプタ・キャップ12およびフランジ13がそれぞれの座42および44に係合するように、プローブがプレート40に平行に2つのブロック41および43上に設置されると、ブロック43は、必要とされる調整を得るために、ブロック41に対して摺動させられることができる。プローブの引っ込みの範囲は、概略的に図示するプレート40上に設けられた適当なスケール47上で読み取ることができる。
【0028】
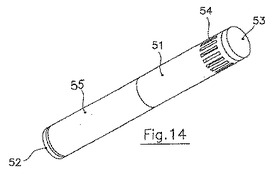
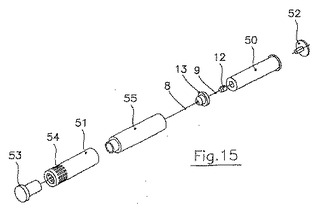
図14は、SPMEファイバに損傷を与えるリスクが無い状態で、現場で作業者によってサンプリングが行われることを可能にする、本発明によるSPMEファイバ・プローブおよび装置と共に使用するための保護容器を示す。この容器は2つの円柱要素50および55を有し、この円柱要素50および55は、ファイバを取り囲んでおり、またサンプリング手順中にファイバの長さZが変化するのを回避するようにフランジ13またはアダプタ・キャップ12のいかなる移動も防げる。要素50は、フランジ13が要素55の底部に当たって静止し、要素50の端がフランジ13に突き当たるように、要素55の内部で係合する。要素55は、ファイバ・サンプリングおよび輸送中に針を保護するさらなる管状要素51に部分的に係合する。要素51は、(サンプリング・レンジの値を変造する)第2の拡散チャンバを作成することなく、分析する環境内の空気流にファイバが接触することを可能にするスリット54を有する。ファイバの吸着を中断させ、ファイバの輸送を安全な方法で可能にするために、サンプリング手順を終了した後に使用するための、キャップ52および53も存在する。
【0029】
本発明による装置が、先に述べた目的を完全に達成することを上の説明は明確に示している。特に、本発明による装置は、ガスクロマトグラフが、他の環境で既に暴露されたプローブを供給されなければならないときも、分析物がサンプラー・アームにとってアクセス可能な試験管の内容物から抽出されなければならないときも、SPME分析手順の完全自動化を可能にする。これは、装置に関してオペレータの作業の劇的な減少を可能にし、エラーのリスクも最小にする。さらに、分析を終了するのにかかる時間が減少し、装置は、オペレータが介入する必要なしで、数日間にわたって連続して動作することさえもできる。
【0030】
最後に、手順の完全自動化は、従来の機器に対する簡単な構造的変更によって可能になり、必要なコンポーネントが全て、既に使用中の部分的に自動化された装置を、本発明による完全に自動化された装置に変換するためのキットの形態で供給されることができることを意味する。
【0031】
本発明によるサンプリング装置および関連するプローブのさらなる利点は、それらが、暴露したSPMEファイバをガスクロマトグラフィ装置に自動的に供給するのに使用されるだけでなく、例えば空気分析のための無人のサンプリング・ステーションにおいて自動サンプリングを実施するのにも使用されることができることにある。空気分析では、ある時刻に、プローブは、サンプリング窓内で暴露され、予め決めた時間後に、ラックに戻して格納され、後で遠隔の試験所で分析されるのを待つ必要がある。
【0032】
本発明に対する種々の修正および変更は、本願の開示の検討に基づいて認識されてもよい。これらの変更および付加は、添付する特許請求の範囲によって規定される本発明の範囲および精神の範囲内にあることが意図される。
【図面の簡単な説明】
【0033】
【図1】本発明による装置の全体斜視図である。
【図2】本発明によるSPMEファイバを有するプローブの分解斜視図である。
【図3】本発明によるSPMEファイバを有するプローブの組み立て斜視図である。
【図4】SPMEファイバを有するプローブ用のホルダの斜視図である。
【図5】プローブおよびSPMEファイバを完備した図4のホルダの斜視図である。
【図6】SPMEファイバを収容するプローブが搬送ブラケット上に設置された状態の搬送ブラケットの斜視図である。
【図7】搬送ステーションでの、SPMEファイバを有するプローブの位置決めを示す図である。
【図8】SPMEファイバを有するプローブが、搬送ステーションから、オートサンプラー・アームによって保持されたホルダ内に装填されるときのステップの側面図である。
【図9】図8に示すステップの斜視図である。
【図10】オートサンプラー・アームのヘッド上のガイド・ブロックの、下から見た斜視図である。
【図11】本発明による、SPMEファイバを有するプローブの別の実施例の斜視図である。
【図12】図11のSPMEファイバを有するプローブと共に使用するのに適した搬送ステーションの別の実施例の斜視図である。
【図13】プローブを較正するデバイスの斜視図である。
【図14】プローブ用の保護容器の斜視図である。
【図15】プローブが保護容器内に収容された状態の、図14の保護容器の分解斜視図である。
【技術分野】
【0001】
本発明は、広義には、化学分析用、特にガスクロマトグラフィ装置によって実施される化学分析用の計測器の分野に関するものである。特に、本発明は自動固相マイクロ抽出(SPME)サンプリング装置に関するものである。
【背景技術】
【0002】
公知のように、固相マイクロ抽出(SPME)は、流体ポリマ相、固体吸着剤、または両者の組合せが固定された溶融シリコン・ファイバを使用する分析方法である。コーティングされたファイバ(以降、SPMEファイバと称する)は液体サンプルまたはサンプルの上のヘッド空間内に浸されて対象となる分析物を吸着し、この分析物はその後ガスクロマトグラフ注入器内で熱を使用して脱離され、キャピラリ・カラムに搬送される。方法の選択性は、ファイバをコーティングする相タイプまたはその厚さを変更することによって変えることができる。この分析方法は種々の分野で普及してきており、生物学的分析および環境分析のため、毒物学のため、ならびに農業食品分野で使用される。
【0003】
SPMEユニットは本質的に2つの部分からなる。1つは、一端においてプラスチック・コネクタに取り付けられた被コーティング溶融シリコン・ファイバであって、他端の暴露を可能にするように針内に摺動可能に収容される被コーティング溶融シリコン・ファイバからなるプローブであり、もう1つは、実質的に注射針のように見える管状容器であって、ファイバのコネクタがねじ込まれるプランジャを備えた管状容器である。プランジャの摺動動作によって、ファイバの多くの部分または少しの部分が針から延び、あるいは針の内部に引っ込む。分析物は、ファイバのコーティングされた部分を試験管のヘッド空間内で暴露することによって、またはファイバのコーティングされた部分を流体(例えば水、牛乳、果物ジュース、ワインなど)内に浸すことによって、またはファイバを(空気浮遊汚染物質の濃度が測定される必要がある作動環境内の)空気に暴露することによって、抽出されることができる。
【0004】
3つのタイプのプローブ容器(以降、ホルダと称する)、すなわち手動分析用ホルダ、現場試験用ホルダ、および自動サンプラー用ホルダ(オートサンプラー)が入手可能である。オートサンプラーは、ロボット・アームを備えた公知の装置であり、ロボット・アームは、分析物を抽出(サンプリング)してそれをガスクロマトグラフ内に注入する操作を自動的に実施することを可能にする。その一方で、ペレータは、コーティングされたファイバを交換する必要が生じるたびに、検査する化合物の等級に応じて処置を講じなければならず、これは、異なる相が固定されたファイバを必要とする場合がある。そのような場合、分析するサンプルは、ロボット・アームのサンプリング・ヘッドにアクセス可能な適切な支持プレート内に挿入された試験管内に収容されることができる。
【0005】
SPME法を使用すると、オートサンプラー・アーム上に設置されたプローブを変更する必要があるときはいつでも、オペレータは処置を講じなければならないため、抽出/注入手順の自動化は制限される。さらに、ガスクロマトグラフ内へのそれぞれの注入後にプローブを交換しなければならない状況が存在する。例えば所与のサンプリング・キャンペーン中、サンプルを回収するよう任命された技術者が、監視する環境にファイバが暴露された多数のプローブを持って試験所に戻る可能性があるとき、空気浮遊汚染物質を判定するために自動化分析は適していない。このタイプの分析では、ファイバの数は、監視するエリア内の選択されたサンプリング地点の数、およびそのエリアで作業する人の数に依存する。2つ以上の汚染物質に対する職員の暴露を評価するために、作業者の衣服に1つまたは複数のプローブが取り付けられてもよい。
【0006】
環境分析では、各SPMEプローブは、オペレータがサンプルをガスクロマトグラフ内に注入することができる前にホルダ内部でその時常に変えなければならない試験管と同等のものである。市場で現在入手可能なホルダを使用すると、SPMEファイバは、一部のオートサンプラーに関して使用することができるが、いくつかのファイバは、オートサンプラーが停止され、そしてプローブを変えるためにオペレータが手近にいなければ、単一作業セッションで同時に使用することができない。さらに、各ファイバが所与のサンプリング地点を表す環境分析において、時間節約の観点から、分析物を手作業でポートを通して注入することと、オートサンプラー内のホルダ内にファイバを設置することとの間に、差が存在しない。これは、例えば2つの物質がそれに関して検査されなければならず、且つ2つの異なるSPMEファイバの使用を必要とする2組のサンプルが存在する場合に、第1組のサンプルは最初に分析されなければならず、次いで第2組のサンプルを分析する前にファイバを変えなければならないため、SPME法の重大な欠点を示す。この問題は、液体サンプルまたは生物学的サンプルの検査においてすでに重大なことであるが、環境サンプリングの場合にさらに増幅され、このとき、完全な自動処理の欠落は、分析を実施するのにかかる時間をかなり延長させる。
【発明の開示】
【発明が解決しようとする課題】
【0007】
本発明の目的は、オートサンプラー・アーム上のSPMEプローブの自動交換を可能にする、固相マイクロ抽出(SPME)で使用するための自動サンプリング装置を提供することである。
【0008】
本発明の別の目的は、いくつかのさらなるコンポーネントを単に付加することによって、既に使用中のサンプリング機器に容易に一体化することができる方法で、オートサンプラー・アーム上のSPMEファイバを変更することを可能にする上述したタイプの装置を提供することである。
【0009】
したがって本発明の別の目的は、従来の半自動オートサンプラーを、本発明による全自動装置に変換するために必要なコンポーネントを含むアダプタ・キットを提供することである。
【0010】
本発明のさらなる目的は、上述したタイプの自動サンプリング装置で使用するのに適したSPMEプローブを提供することである。
【課題を解決するための手段】
【0011】
これらの目的は、その主要な特徴が特許請求の範囲の請求項1、請求項10、および請求項15に記載されている本発明による自動固相マイクロ抽出(SPME)サンプリング装置によって達成される。
【0012】
さらなる重要な特徴は、従属請求項に記載されている。
【0013】
本発明による自動固相マイクロ抽出(SPME)サンプリング装置の他の特徴および利点は、添付図面を参照して、非制限的な実施例として本明細書で示される本発明の実施例の以下の説明から明らかになるであろう。
【実施例】
【0014】
本発明による装置は、包括的に数字1で示されるガスクロマトグラフィ分析用の検出器(例えば質量分析器)に関連して図1に概略的に示されており、またガスクロマトグラフによって支持されるロボット・オートサンプラー・アーム2を有している。このガスクロマトグラフ上には、SPMEファイバを収容するプローブ(数字5によって示す)を支持する1または複数のトレイ4が整然と配列されている。これらのプローブは、例えば環境分析のキャンペーンからもたらされたものであってもよく、ガスクロマトグラフィ分析できる状態にある。トレイ4に並んで、後でより詳細に述べられるプローブ5を搬送するブラケット(包括的に数字6で示す)が存在する。数字7は、ガスクロマトグラフィ装置の2つの注入器を示す。
【0015】
図2および図3を参照すると、本発明によるサンプリング・プローブ5は、SPMEファイバ9を摺動可能に収容する針8からなる従来のプローブを有している。プラスチック・コネクタ10がファイバ9の一端に取り付けられており、これは従来のシステムではプローブ・ホルダのプランジャにねじ込まれる。真鍮スペーサ・リング11が同様に針8の隣接端に取り付けられる。強磁性材料でできたアダプタ・キャップ12がコネクタ10に取り付けられ、一方、同様に強磁性材料でできたフランジ13がスペーサ・リング11に固定される。特に、フランジ13は、半径方向不連続部13aおよび外と内の両方にねじを切った部分13bを有する。スペーサ・リング11上にフランジ13を組み立てるために、針8は、フランジ13に同軸になるまで不連続部13aを通過させられ、フランジ13は、そのねじを切った部分13bによって、スペーサ・リング11上にねじ込まれ、ついには両者が並置される。その後、固定スリーブ14が、針8に同軸に、ねじを切った部分13bにねじ込まれる。
【0016】
図4および図5に示すように、数字15は、SPMEファイバ9を有するプローブ5を保持するために、サンプラー・アーム2のヘッド2aに取り付けるのに適した実質的に従来の構造のホルダを示す。ホルダ15は、プランジャ17を摺動可能に収容する管状本体16を有し、プランジャ17のステム17aは、当業者によく知られているタイプであるために図示されない移動式デバイスに接続される。ホルダ15の本体16は、針8が本体16から軸方向に延びるように、図5に示すように、移動中にプローブ5を収容するチャンバ19にアクセスすることを可能にする長手方向窓18を有する。特に、磁石20は、チャンバ19内部のプランジャ17の端に取り付けられ(図4)、同様に、円形に配列された磁性要素22の列を保持するフランジ21は、本体16の自由端に取り付けられる。フランジ21と本体16の自由端は共に、半径方向不連続部を有し、(図5に示すように)プローブ5がチャンバ19内部に設置されるか、またはチャンバ19から取り外されるときに、針8の通過を可能にする。図5に示す状態では、プローブ5は、2つの磁性接続によってホルダ15に固定され、この2つの磁性接続は、一方の側面で、プランジャ17の端に位置する磁石20に取り付けられるアダプタ・キャップ12からなり、そして他方の側面で、本体16の自由端に位置する磁性フランジ21に取り付けられるフランジ13からなる。
【0017】
図6に示すように、SPMEファイバを保持するプローブ5を搬送するためのブラケット6は、装置のケーシング3に固定することができるベース23およびベース23から立ち上がる直立部24を有する。第1および第2の支持プレート25および26は、直立部24からベース23の上に延び、それぞれの座25aおよび26aにおいて、SPMEファイバ9を保持するプローブ5上のアダプタ・キャップ12およびフランジ13に係合することを意図されている。第1および第2の支持プレート25と26との間には、後で説明されることになる目的で、一対のアーム27も、直立部24から延びる。
【0018】
図7に示すように、ホルダ15はプレート28によってオートサンプラー・アーム2のヘッド2aに実質的に従来の方法で固定される。オートサンプラー・アーム2のヘッド2aはまた、プローブ5の針8を誘導するためのホルダ・プレート28の下で整列した2つのガイド・ブロック29a、29bであって、前記プレート28から延びるアーム30によって支持された2つのガイド・ブロック29a、29bを備える。さらに、図10に示すように、数字29bによって指示される、2つのガイド・ブロックの下側部分は、SPMEファイバ9上のアダプタ・キャップ12に磁気的に結合することができるようにその下面に円形に配列された磁石33の列を保持する。
【0019】
本発明による装置の動作は、図7、図8、および図9を特に参照して以下で述べられる。最初に、(例えば環境分析のキャンペーンからもたらされた)プローブ5がトレイ4内の適したラックに垂直に設置され、この時サンプラー・アーム2のヘッド2aは図1に示す静止位置にある。サンプラー・アーム2は、コンピュータ(図示せず)によって制御されるデカルト(直交座標)・タイプの移動を特徴とし、コンピュータには、各プローブの位置を有するトレイ4のマップが記憶され、それによりサンプラー・アーム2はトレイ4上のプローブ5の上の位置に移動し、必要とされるプローブ5の上でガイド・ブロック29a、29bを整列させることができる。その後、下方移動が始まり、ついには下側部分ガイド・ブロック29bが、前方に置かれたプローブのアダプタ・キャップ12に磁気的に係合し、このプローブはその後トレイ4内の座から持ち上げられ、搬送ブラケット6まで運ばれることができ、搬送ブラケット6において、プローブは、アダプタ・キャップ12およびフランジ13が支持プレート26および25に載るようにそれぞれの座26aおよび25aに設置される。ガイド・ブロック29bの端は、ガイド・ブロック29bを搬送ブラケット6から離れるように長手方向に摺動させることによってアダプタ・キャップ12から分離される。キャップ12は、キャップ12から突出するプラスチック・コネクタ10によって座に維持され、またブロック29bが搬送ブラケット6から離れるように移動した時に外れ、もはやブロック29bの磁石はキャップ12に接触しない。
【0020】
ガイド・ブロック29bがプローブ5から分離されると、アーム2のヘッド2aは、ホルダ15内の窓18をアダプタ・キャップ12に整列させるために下に移動する。ヘッド2aのその後の前方摺動移動は、ホルダ15を直立部24の方に移動させ、ついには、図8および図9に示すように、アダプタ・キャップ12が、ホルダ15内のチャンバ19内部にあるようになる。
【0021】
その後、プランジャ17は、その磁性端20をアダプタ・キャップ12にぶつからせ、アダプタ・キャップ12は磁性端20に取り付けられたままになり、その後、アーム2上のヘッド2aは、磁性フランジ21を針8上のフランジ13に接触させるように移動する。こうしてプローブ5はホルダ15にしっかり取り付けられ、その結果搬送ブラケット6から分離され、針8が最終的に係合する注入器7の方へ運ばれることができる。最終ステージにおいて、針8はまた、ガイド・ブロック29a、29bに係合して、ガスクロマトグラフ注入器7への挿入中に針8が曲がることを回避される。
【0022】
針8が注入器7に挿入されると、プロセスは通常の方法で続く。針8内のファイバ9は、分析する物質の脱離を可能にするために暴露され、必要な時間が経過したとき針8は注入器7から引き出され、プローブ5は搬送ブラケット6に戻され、図9に示すように再位置決めされる。プローブは、磁石20がアダプタ・キャップ12から分離するまでホルダ内のプランジャ17を持ち上げることによって外れ、そのとき、プランジャ17は、窓18の一番上に隣接している。その後ホルダは、フランジ13がアーム27に突き当たるまで、磁性フランジ21とフランジ13との間の磁気力に打ち勝つのに十分な力でプローブを上方に引き上げ、それによってプローブ5は、キャップ12およびフランジ13がプレート26および25内のそれぞれの座26aおよび25aに嵌合するまで、ブラケット6を下方に自由降下する。その後、先に述べたサンプル回収ステップが逆順で行われ、したがってプローブ5はトレイ4内のその座に復帰し、オートサンプラー・アーム2はいつでも新しいプローブ5を回収することができるようになる。
【0023】
本発明によれば、プローブを回収するための可動サンプラー・アームに関して本質的に2つの異なる方法が存在する。第1モードは、プローブが、ガイド・ブロックの下端29bに磁気的に取り付けられるアダプタ・キャップ12によってアームのヘッドに接続されることを含み、これは、搬送ブラケット6へのプローブの位置決めおよび搬送ブラケット6からのプローブの取り外しを可能にする。第2モードは、プローブが、プランジャの端17aおよびホルダ15の本体16の自由端にそれぞれ磁気的に取り付けられるアダプタ・キャップ12およびフランジ13によってホルダ15に接続されることを含み、これは、搬送ブラケットからホルダへのプローブの搬送および前記ブラケット内へのその後の再挿入を可能にする。可動アーム2の移動および搬送ブラケット6の存在による、1つの回収モードから他の回収モードへの移行は、複数のサンプルを分析する手順が、完全に自動化されることを可能にする。
【0024】
本発明による装置は、有利には、既に暴露されたSPMEファイバを収容したプローブを使用して分析を実施するためだけではなく、トレイ内に設置された試験管内に収容されたサンプルからの対象となる分析物の直接抽出、およびガスクロマトグラフ内でのその後の脱離にも使用することができる。この場合、上で説明したことに照らして、当業者に自明であるシーケンスによれば、まだ暴露されなければならないプローブ5を保持しているオートサンプラー・アームのヘッド2aは、トレイ4内の所与の試験管の上に運ばれ、プランジャ17をホルダ15内で摺動させることによって針を試験管内に挿入する。ここで再び、針8は2つのガイド・ブロック29a、29bに係合され、それによって、試験管内への針の挿入中にプランジャによって針に加えられる力による針の曲げのいかなるリスクも回避される。SPMEファイバは、必要とされる時間の間試験管内部で暴露されると針内部に引っ込められ、針は試験管から取り外され、その後プローブはガスクロマトグラフ注入器に搬送され、ガスクロマトグラフ注入器にてプローブが挿入され、脱離相が始まる。
【0025】
検査すべき分析物が、異なる等級の化合物に属し、その結果、異なる相を有するファイバを必要とする場合、本発明による装置は、以前に使用したプローブを脱離した後にトレイ4から未暴露プローブを回収して、適切な未暴露プローブを自動的に装備することができる。切換えは、先に述べた方法で、搬送ブラケット6を使用して行われる。
【0026】
上述した実施例では、プローブのフランジ13は、生じる力がフランジ13とフランジ21との間の磁気力を超えるまで一対のアーム27に当たるように押し付けられ、それによってプローブ5がアーム27によってフランジ21から外される。図11および図12に示す代替の実施例では、プローブ5は、同じ方法でガイド・ブロック29bから外され、この時フランジ21は、針8から離れるように垂直方向にヘッド2aによって加えられる単純な牽引力によってフランジ13から分離される。この目的のために、針8を挿入するためのフランジ13上の半径方向不連続部13aは、広い開口セクション31を有している。前記広い開口セクション31に係合するために、搬送ブラケット6のプレート25上に対応する基準歯32が存在し、それによりプローブは、搬送ブラケット上の一定位置に維持される間、プローブが摺動して外れるリスクが無い状態で、半径方向牽引力によって外されることができる。これは、フランジ13およびアダプタ・キャップがそれぞれの座に横方向から当接するためである。この解決策はまた、プローブを搬送ブラケット上に落とすことによるプローブの位置決めを回避するものであり、この位置決めはプローブに損傷を与える可能性があった。
【0027】
図13は、プローブを較正するときに使用するため、すなわちファイバが針内部に引っ込められる範囲(通常Zとして示す)を調整するための、本発明による装置用の有用な付属品を示す。このパラメータは、ファイバの暴露の範囲およびその結果のサンプリング・レンジを決定する。デバイスは、長手方向中間位置に固定された第1座42であって、プローブ上のアダプタ・キャップ12を収容するように形作られた第1座42を有する第1ブロック41、ならびに2つの結合した部分43aおよび43bであって、それらの間にプローブ上のフランジ13を収容する第2座44を画定し、且つフランジ13の第2座44内での軸方向の摺動を防止するように形作られる部分43aおよび43bからなる第2動ブロック43を有するプレート40を有する。2つのブロックの少なくとも一方は、プレート40上に長手方向に形成された対応する形状のスロット46内部に係合するT形状付属物45を有する。アダプタ・キャップ12およびフランジ13がそれぞれの座42および44に係合するように、プローブがプレート40に平行に2つのブロック41および43上に設置されると、ブロック43は、必要とされる調整を得るために、ブロック41に対して摺動させられることができる。プローブの引っ込みの範囲は、概略的に図示するプレート40上に設けられた適当なスケール47上で読み取ることができる。
【0028】
図14は、SPMEファイバに損傷を与えるリスクが無い状態で、現場で作業者によってサンプリングが行われることを可能にする、本発明によるSPMEファイバ・プローブおよび装置と共に使用するための保護容器を示す。この容器は2つの円柱要素50および55を有し、この円柱要素50および55は、ファイバを取り囲んでおり、またサンプリング手順中にファイバの長さZが変化するのを回避するようにフランジ13またはアダプタ・キャップ12のいかなる移動も防げる。要素50は、フランジ13が要素55の底部に当たって静止し、要素50の端がフランジ13に突き当たるように、要素55の内部で係合する。要素55は、ファイバ・サンプリングおよび輸送中に針を保護するさらなる管状要素51に部分的に係合する。要素51は、(サンプリング・レンジの値を変造する)第2の拡散チャンバを作成することなく、分析する環境内の空気流にファイバが接触することを可能にするスリット54を有する。ファイバの吸着を中断させ、ファイバの輸送を安全な方法で可能にするために、サンプリング手順を終了した後に使用するための、キャップ52および53も存在する。
【0029】
本発明による装置が、先に述べた目的を完全に達成することを上の説明は明確に示している。特に、本発明による装置は、ガスクロマトグラフが、他の環境で既に暴露されたプローブを供給されなければならないときも、分析物がサンプラー・アームにとってアクセス可能な試験管の内容物から抽出されなければならないときも、SPME分析手順の完全自動化を可能にする。これは、装置に関してオペレータの作業の劇的な減少を可能にし、エラーのリスクも最小にする。さらに、分析を終了するのにかかる時間が減少し、装置は、オペレータが介入する必要なしで、数日間にわたって連続して動作することさえもできる。
【0030】
最後に、手順の完全自動化は、従来の機器に対する簡単な構造的変更によって可能になり、必要なコンポーネントが全て、既に使用中の部分的に自動化された装置を、本発明による完全に自動化された装置に変換するためのキットの形態で供給されることができることを意味する。
【0031】
本発明によるサンプリング装置および関連するプローブのさらなる利点は、それらが、暴露したSPMEファイバをガスクロマトグラフィ装置に自動的に供給するのに使用されるだけでなく、例えば空気分析のための無人のサンプリング・ステーションにおいて自動サンプリングを実施するのにも使用されることができることにある。空気分析では、ある時刻に、プローブは、サンプリング窓内で暴露され、予め決めた時間後に、ラックに戻して格納され、後で遠隔の試験所で分析されるのを待つ必要がある。
【0032】
本発明に対する種々の修正および変更は、本願の開示の検討に基づいて認識されてもよい。これらの変更および付加は、添付する特許請求の範囲によって規定される本発明の範囲および精神の範囲内にあることが意図される。
【図面の簡単な説明】
【0033】
【図1】本発明による装置の全体斜視図である。
【図2】本発明によるSPMEファイバを有するプローブの分解斜視図である。
【図3】本発明によるSPMEファイバを有するプローブの組み立て斜視図である。
【図4】SPMEファイバを有するプローブ用のホルダの斜視図である。
【図5】プローブおよびSPMEファイバを完備した図4のホルダの斜視図である。
【図6】SPMEファイバを収容するプローブが搬送ブラケット上に設置された状態の搬送ブラケットの斜視図である。
【図7】搬送ステーションでの、SPMEファイバを有するプローブの位置決めを示す図である。
【図8】SPMEファイバを有するプローブが、搬送ステーションから、オートサンプラー・アームによって保持されたホルダ内に装填されるときのステップの側面図である。
【図9】図8に示すステップの斜視図である。
【図10】オートサンプラー・アームのヘッド上のガイド・ブロックの、下から見た斜視図である。
【図11】本発明による、SPMEファイバを有するプローブの別の実施例の斜視図である。
【図12】図11のSPMEファイバを有するプローブと共に使用するのに適した搬送ステーションの別の実施例の斜視図である。
【図13】プローブを較正するデバイスの斜視図である。
【図14】プローブ用の保護容器の斜視図である。
【図15】プローブが保護容器内に収容された状態の、図14の保護容器の分解斜視図である。
【特許請求の範囲】
【請求項1】
固相マイクロ抽出(SPME)ファイバ(9)を有するプローブ(5)を使用する自動SPMEサンプリング装置であって、
前記SPMEファイバ(9)は針(8)内部に摺動可能に配置され、それによって前記SPMEファイバ(9)は、対象となる分析物を吸着する環境に暴露されること、およびその後、前記分析物の脱離のためにガスクロマトグラフィ注入器(7)内部に存在することができるようになっており、
前記装置は、予定されたプログラムに従って可動なアーム(2)を有し、該アーム(2)は、実質的に管状のホルダ(15)を担持するヘッド(2a)を有し、該管状のホルダ(15)は、前記プローブ(5)のためのチャンバ(19)と、前記ファイバ(9)の少なくとも一部分の押し出しおよび引っ込みを起動するための前記ホルダ内のプランジャ(17)とを有し、
また前記装置は、分析するためにサンプルを収容する試験管、および/または既に暴露されたSPMEファイバ、および任意選択で、前記可動アーム(2)にとってアクセス可能なさらに暴露されなければならないファイバを有するプローブの格納ユニット(4)を有し、
また前記装置は、
(A) 前記プローブ内の前記SPMEファイバ(9)の一端部に、強磁性材料でできた接続要素(12)が取り付けられ、前記ファイバが係合する前記針の端部が強磁性フランジ(13)を有していること、
(B) 前記ホルダ(15)内の前記プランジャ(17)が、前記ファイバと相互作用する端部に少なくとも1つの磁石(20)を有し、1または複数のさらなる磁石(22)が前記ホルダの自由端部に設けられていること、
(C) 前記ヘッド(2a)は、前記プローブ(5)が前記ホルダ(15)内に係合した時に前記針(8)を摺動可能に収容するための少なくともガイド・ブロック(29a,29b)を有し、該ガイド・ブロック(29b)は、前記ホルダの自由端部の下に配置され、また前記ガイド・ブロック(29b)の下側端部に少なくとも1つの磁石(33)が取り付けられていること、
(D) 前記可動アーム(2)にとってアクセス可能であり且つ1つのプローブ(5)を垂直に支持するのに適した中間搬送ブラケット(6)であって、前記SPMEファイバ上の前記強磁性コネクタおよび前記針上の前記強磁性フランジと係合するための手段(25,26)を有する中間搬送ブラケット(6)が設けられていること、
(E) 前記可動アーム(2)の前記ヘッド(2a)は、前記ガイド・ブロック(29b)の端部を前記SPMEファイバ上の前記強磁性コネクタ(12)に当たるようにすることによって第1回収モードに従って前記プローブ(5)を回収すること、または前記プランジャ(17)の端部および前記ホルダ(15)の自由端部を前記SPMEファイバ上の前記コネクタ(12)および前記針上の前記フランジ(13)にそれぞれ当たるようにすることによって第2回収モードに従って前記プローブ(5)を回収することに適しており、それにより、前記プローブ(5)は、前記針(8)が前記ホルダ(15)から軸方向に延びた状態で、前記ホルダ(15)の前記チャンバ(19)内部に設置されていること、および
(F) 前記可動アーム(2)の対応する移動の結果として、前記第1回収モードは、前記プローブ(5)を前記格納ユニット(4)から前記中間搬送ブラケット(6)へ、およびその逆へ搬送するのに使用され、一方前記第2回収モードは、前記プローブ(5)を前記中間搬送ブラケット(6)から前記ガスクロマトグラフィ注入器(7)へ、または分析物を吸着するための前記格納ユニット(4)へ搬送するのに使用されること
を特徴とする装置。
【請求項2】
前記中間搬送ブラケット(6)は直立部(24)を有し、前記直立部(24)は、該直立部(24)から延びる2つの支持要素(25,26)を有し、前記2つの支持要素(25,26)は、前記SPMEファイバ上の前記コネクタ(12)および前記針上の前記フランジ(13)が横方向に係合するそれぞれの同軸座(25a,26a)を有し、前記各座は、前記SPMEファイバおよび前記針の通過に適した半径方向不連続部を有している請求項1に記載の装置。
【請求項3】
一対の平行アーム(27)が、前記支持要素(25,26)の間で前記直立部(24)から延びており、
前記アームは、前記プランジャ(12)の前記磁性端部(20)が前記ファイバ上の前記コネクタ(12)から分離した後で前記ヘッド(2a)が持ち上げられた時に前記ホルダ(15)の自由端部上の前記磁石(22)によって加えられる磁気吸引力を超える力を前記針の前記フランジに加えるように、前記針の前記フランジに接するように意図されている請求項2に記載の装置。
【請求項4】
前記針の前記フランジ(13)が横半径方向スリット(13a)を有し、前記スリットに係合する基準歯(32)が前記中間搬送ブラケット(6)のそれぞれの支持要素(25)上に設けられ、この支持要素(25)の上に前記フランジ用の前記座(25a)が形成され、前記第1回収モードにおいて前記ガイド・ブロック(29b)は、前記ヘッド(2a)が前記プローブ(5)から垂直に離れるように移動することによって、前記コネクタ(12)から分離される請求項1または請求項2に記載の装置。
【請求項5】
前記SPMEファイバ上の前記コネクタは、強磁性材料でできたアダプタ・キャップ(12)が取り付けられたプラスチック・コネクタ(10)からなる請求項1から請求項4までのいずれか一項に記載の装置。
【請求項6】
前記針(8)上の前記強磁性フランジ(13)は、前記針に同軸の固定スリーブ(14)によって、前記針(8)の端部でスペーサ・リング(11)に固定されている請求項1から請求項5までのいずれか一項に記載の装置。
【請求項7】
前記フランジ(13)は、前記針(8)の通過を可能にするための横半径方向不連続部(13a)を有している請求項6に記載の装置。
【請求項8】
前記装置は、前記ファイバ(9)が前記針(8)内部に引っ込められる範囲を調整するためのデバイス(2)も有しており、前記調整デバイス(2)は、支持プレート(40)と、前記ファイバの前記コネクタ(12)を収容する座(42)を有し且つ前記プレートに固定された第1ブロック(41)と、前記針上の前記フランジ(13)を収容する座(44)を有し且つ前記支持プレートに沿って摺動する第2ブロック(43)とを有し、前記支持プレートは、前記プローブ(5)が前記ブロック上に設置された時に前記ファイバの引っ込みの範囲を所定の値に調整するために、前記摺動ブロックが移動する軸線に沿って目盛りを付けたスケール(47)も有している請求項1から請求項7までのいずれか一項に記載の装置。
【請求項9】
前記装置は前記プローブ(5)のための保護容器も有しており、前記保護容器は、前記フランジ(13)から延びるSPMEファイバの部分を収容する第1管状要素(50)と、第2管状要素(55)であって、前記フランジを第2管状部材(55)の底部に当てて静止させるように前記第1管状要素(50)が係合する第2管状要素(55)と、第3管状要素(51)であって、前記針(8)が第3管状要素(51)内部に延びるように前記第2管状要素(55)が少なくとも部分的に係合する第3管状要素(51)とからなり、スリット(54)が前記第3管状要素(51)上に形成され、それによって前記第3管状要素(51)の内部が、前記ファイバ上に吸着される物質を含む外部環境と連絡するようになされる請求項1から請求項8までのいずれか一項に記載の装置。
【請求項10】
針(8)内に摺動可能に収容される固相マイクロ抽出(SPME)ファイバ(9)を有するSPME用のプローブであって、前記ファイバは、強磁性材料でできたコネクタ(12)を一端部に有し、前記ファイバが係合する前記針の端部は、強磁性材料でできたフランジ(13)を有することを特徴とするプローブ。
【請求項11】
前記ファイバ上の前記コネクタは、前記ファイバ(9)の一端部に取り付けられたプラスチック・コネクタ(10)と、前記コネクタ(10)に取り付けられた強磁性材料でできたアダプタ・キャップ(12)とを有している請求項10に記載のプローブ。
【請求項12】
前記針上の前記強磁性フランジ(13)は、前記針に同軸のスリーブ(14)によって、前記針の端部のスペーサ・リング(11)に取り付けられる請求項10または請求項11に記載のプローブ。
【請求項13】
前記フランジ(13)は、前記針(8)の通過を可能にするための横半径方向不連続部(13a)を有している請求項10から請求項12までのいずれか一項に記載のプローブ。
【請求項14】
前記横半径方向不連続部は、広い開口セクション(31)を有している請求項13に記載のプローブ。
【請求項15】
半自動の固相マイクロ抽出(SPME)サンプリング機器を全自動SPMEサンプリング機器に変換するアダプタ・キットであって、
前記全自動SPMEサンプリング機器は、SPMEファイバ(9)を有するプローブ(5)を使用しており、前記SPMEファイバ(9)は、対象となる分析物を吸着できる環境に暴露されること、および前記分析物の脱離のためにガスクロマトグラフィ注入器(7)内に存在することができるように、針(8)内に摺動可能に収容されており、
また前記アダプタ・キットは、
(A) 前記SPMEファイバ(9)の端部に位置するコネクタ(10)に取り付けるための強磁性材料でできたアダプタ・キャップ(12)と、
(B) 前記針(8)の端部上のスペーサ・リング(11)に取り付けるための、対応する固定スリーブ(14)を備えた強磁性材料でできたフランジ(13)と、
(C) 前記プローブ用のホルダ(15)のプランジャ(17)の端部、前記ホルダ(15)の自由端部、および前記機器の一部を形成する前記可動アーム(2)のヘッド(2a)によって保持される前記針(8)を摺動可能に収容するガイド・ブロック(29b)の自由端部に取り付けるための複数の磁性要素(20,22,23)と、
(D) プローブを垂直に支持するための中間搬送ブラケット(6)であって、前記SPMEファイバ上の前記強磁性コネクタ(12)および前記強磁性フランジ(13)と係合するための手段(25,26)を有する中間搬送ブラケット(6)と
を有することを特徴とするアダプタ・キット。
【請求項1】
固相マイクロ抽出(SPME)ファイバ(9)を有するプローブ(5)を使用する自動SPMEサンプリング装置であって、
前記SPMEファイバ(9)は針(8)内部に摺動可能に配置され、それによって前記SPMEファイバ(9)は、対象となる分析物を吸着する環境に暴露されること、およびその後、前記分析物の脱離のためにガスクロマトグラフィ注入器(7)内部に存在することができるようになっており、
前記装置は、予定されたプログラムに従って可動なアーム(2)を有し、該アーム(2)は、実質的に管状のホルダ(15)を担持するヘッド(2a)を有し、該管状のホルダ(15)は、前記プローブ(5)のためのチャンバ(19)と、前記ファイバ(9)の少なくとも一部分の押し出しおよび引っ込みを起動するための前記ホルダ内のプランジャ(17)とを有し、
また前記装置は、分析するためにサンプルを収容する試験管、および/または既に暴露されたSPMEファイバ、および任意選択で、前記可動アーム(2)にとってアクセス可能なさらに暴露されなければならないファイバを有するプローブの格納ユニット(4)を有し、
また前記装置は、
(A) 前記プローブ内の前記SPMEファイバ(9)の一端部に、強磁性材料でできた接続要素(12)が取り付けられ、前記ファイバが係合する前記針の端部が強磁性フランジ(13)を有していること、
(B) 前記ホルダ(15)内の前記プランジャ(17)が、前記ファイバと相互作用する端部に少なくとも1つの磁石(20)を有し、1または複数のさらなる磁石(22)が前記ホルダの自由端部に設けられていること、
(C) 前記ヘッド(2a)は、前記プローブ(5)が前記ホルダ(15)内に係合した時に前記針(8)を摺動可能に収容するための少なくともガイド・ブロック(29a,29b)を有し、該ガイド・ブロック(29b)は、前記ホルダの自由端部の下に配置され、また前記ガイド・ブロック(29b)の下側端部に少なくとも1つの磁石(33)が取り付けられていること、
(D) 前記可動アーム(2)にとってアクセス可能であり且つ1つのプローブ(5)を垂直に支持するのに適した中間搬送ブラケット(6)であって、前記SPMEファイバ上の前記強磁性コネクタおよび前記針上の前記強磁性フランジと係合するための手段(25,26)を有する中間搬送ブラケット(6)が設けられていること、
(E) 前記可動アーム(2)の前記ヘッド(2a)は、前記ガイド・ブロック(29b)の端部を前記SPMEファイバ上の前記強磁性コネクタ(12)に当たるようにすることによって第1回収モードに従って前記プローブ(5)を回収すること、または前記プランジャ(17)の端部および前記ホルダ(15)の自由端部を前記SPMEファイバ上の前記コネクタ(12)および前記針上の前記フランジ(13)にそれぞれ当たるようにすることによって第2回収モードに従って前記プローブ(5)を回収することに適しており、それにより、前記プローブ(5)は、前記針(8)が前記ホルダ(15)から軸方向に延びた状態で、前記ホルダ(15)の前記チャンバ(19)内部に設置されていること、および
(F) 前記可動アーム(2)の対応する移動の結果として、前記第1回収モードは、前記プローブ(5)を前記格納ユニット(4)から前記中間搬送ブラケット(6)へ、およびその逆へ搬送するのに使用され、一方前記第2回収モードは、前記プローブ(5)を前記中間搬送ブラケット(6)から前記ガスクロマトグラフィ注入器(7)へ、または分析物を吸着するための前記格納ユニット(4)へ搬送するのに使用されること
を特徴とする装置。
【請求項2】
前記中間搬送ブラケット(6)は直立部(24)を有し、前記直立部(24)は、該直立部(24)から延びる2つの支持要素(25,26)を有し、前記2つの支持要素(25,26)は、前記SPMEファイバ上の前記コネクタ(12)および前記針上の前記フランジ(13)が横方向に係合するそれぞれの同軸座(25a,26a)を有し、前記各座は、前記SPMEファイバおよび前記針の通過に適した半径方向不連続部を有している請求項1に記載の装置。
【請求項3】
一対の平行アーム(27)が、前記支持要素(25,26)の間で前記直立部(24)から延びており、
前記アームは、前記プランジャ(12)の前記磁性端部(20)が前記ファイバ上の前記コネクタ(12)から分離した後で前記ヘッド(2a)が持ち上げられた時に前記ホルダ(15)の自由端部上の前記磁石(22)によって加えられる磁気吸引力を超える力を前記針の前記フランジに加えるように、前記針の前記フランジに接するように意図されている請求項2に記載の装置。
【請求項4】
前記針の前記フランジ(13)が横半径方向スリット(13a)を有し、前記スリットに係合する基準歯(32)が前記中間搬送ブラケット(6)のそれぞれの支持要素(25)上に設けられ、この支持要素(25)の上に前記フランジ用の前記座(25a)が形成され、前記第1回収モードにおいて前記ガイド・ブロック(29b)は、前記ヘッド(2a)が前記プローブ(5)から垂直に離れるように移動することによって、前記コネクタ(12)から分離される請求項1または請求項2に記載の装置。
【請求項5】
前記SPMEファイバ上の前記コネクタは、強磁性材料でできたアダプタ・キャップ(12)が取り付けられたプラスチック・コネクタ(10)からなる請求項1から請求項4までのいずれか一項に記載の装置。
【請求項6】
前記針(8)上の前記強磁性フランジ(13)は、前記針に同軸の固定スリーブ(14)によって、前記針(8)の端部でスペーサ・リング(11)に固定されている請求項1から請求項5までのいずれか一項に記載の装置。
【請求項7】
前記フランジ(13)は、前記針(8)の通過を可能にするための横半径方向不連続部(13a)を有している請求項6に記載の装置。
【請求項8】
前記装置は、前記ファイバ(9)が前記針(8)内部に引っ込められる範囲を調整するためのデバイス(2)も有しており、前記調整デバイス(2)は、支持プレート(40)と、前記ファイバの前記コネクタ(12)を収容する座(42)を有し且つ前記プレートに固定された第1ブロック(41)と、前記針上の前記フランジ(13)を収容する座(44)を有し且つ前記支持プレートに沿って摺動する第2ブロック(43)とを有し、前記支持プレートは、前記プローブ(5)が前記ブロック上に設置された時に前記ファイバの引っ込みの範囲を所定の値に調整するために、前記摺動ブロックが移動する軸線に沿って目盛りを付けたスケール(47)も有している請求項1から請求項7までのいずれか一項に記載の装置。
【請求項9】
前記装置は前記プローブ(5)のための保護容器も有しており、前記保護容器は、前記フランジ(13)から延びるSPMEファイバの部分を収容する第1管状要素(50)と、第2管状要素(55)であって、前記フランジを第2管状部材(55)の底部に当てて静止させるように前記第1管状要素(50)が係合する第2管状要素(55)と、第3管状要素(51)であって、前記針(8)が第3管状要素(51)内部に延びるように前記第2管状要素(55)が少なくとも部分的に係合する第3管状要素(51)とからなり、スリット(54)が前記第3管状要素(51)上に形成され、それによって前記第3管状要素(51)の内部が、前記ファイバ上に吸着される物質を含む外部環境と連絡するようになされる請求項1から請求項8までのいずれか一項に記載の装置。
【請求項10】
針(8)内に摺動可能に収容される固相マイクロ抽出(SPME)ファイバ(9)を有するSPME用のプローブであって、前記ファイバは、強磁性材料でできたコネクタ(12)を一端部に有し、前記ファイバが係合する前記針の端部は、強磁性材料でできたフランジ(13)を有することを特徴とするプローブ。
【請求項11】
前記ファイバ上の前記コネクタは、前記ファイバ(9)の一端部に取り付けられたプラスチック・コネクタ(10)と、前記コネクタ(10)に取り付けられた強磁性材料でできたアダプタ・キャップ(12)とを有している請求項10に記載のプローブ。
【請求項12】
前記針上の前記強磁性フランジ(13)は、前記針に同軸のスリーブ(14)によって、前記針の端部のスペーサ・リング(11)に取り付けられる請求項10または請求項11に記載のプローブ。
【請求項13】
前記フランジ(13)は、前記針(8)の通過を可能にするための横半径方向不連続部(13a)を有している請求項10から請求項12までのいずれか一項に記載のプローブ。
【請求項14】
前記横半径方向不連続部は、広い開口セクション(31)を有している請求項13に記載のプローブ。
【請求項15】
半自動の固相マイクロ抽出(SPME)サンプリング機器を全自動SPMEサンプリング機器に変換するアダプタ・キットであって、
前記全自動SPMEサンプリング機器は、SPMEファイバ(9)を有するプローブ(5)を使用しており、前記SPMEファイバ(9)は、対象となる分析物を吸着できる環境に暴露されること、および前記分析物の脱離のためにガスクロマトグラフィ注入器(7)内に存在することができるように、針(8)内に摺動可能に収容されており、
また前記アダプタ・キットは、
(A) 前記SPMEファイバ(9)の端部に位置するコネクタ(10)に取り付けるための強磁性材料でできたアダプタ・キャップ(12)と、
(B) 前記針(8)の端部上のスペーサ・リング(11)に取り付けるための、対応する固定スリーブ(14)を備えた強磁性材料でできたフランジ(13)と、
(C) 前記プローブ用のホルダ(15)のプランジャ(17)の端部、前記ホルダ(15)の自由端部、および前記機器の一部を形成する前記可動アーム(2)のヘッド(2a)によって保持される前記針(8)を摺動可能に収容するガイド・ブロック(29b)の自由端部に取り付けるための複数の磁性要素(20,22,23)と、
(D) プローブを垂直に支持するための中間搬送ブラケット(6)であって、前記SPMEファイバ上の前記強磁性コネクタ(12)および前記強磁性フランジ(13)と係合するための手段(25,26)を有する中間搬送ブラケット(6)と
を有することを特徴とするアダプタ・キット。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公表番号】特表2009−509136(P2009−509136A)
【公表日】平成21年3月5日(2009.3.5)
【国際特許分類】
【出願番号】特願2008−530757(P2008−530757)
【出願日】平成18年9月6日(2006.9.6)
【国際出願番号】PCT/IT2006/000642
【国際公開番号】WO2007/032039
【国際公開日】平成19年3月22日(2007.3.22)
【出願人】(508080355)
【出願人】(508080344)
【Fターム(参考)】
【公表日】平成21年3月5日(2009.3.5)
【国際特許分類】
【出願日】平成18年9月6日(2006.9.6)
【国際出願番号】PCT/IT2006/000642
【国際公開番号】WO2007/032039
【国際公開日】平成19年3月22日(2007.3.22)
【出願人】(508080355)
【出願人】(508080344)
【Fターム(参考)】
[ Back to top ]