
自動地上走行管理
【課題】
【解決手段】輸送体を所定の箇所に移動させる方法は、可能性のある地上走行ルートのリアルタイムイメージを生成する工程と、リアルタイムイメージを格納されたイメージと比較して、可能性のある地上走行ルートが輸送体の箇所と所定の中継地との間で障害物がないかどうかを判断する工程と、可能性のある地上走行ルートに障害物がなければ、輸送体を中継地に地上走行させる工程を有する。本方法を実行する装置もまた、提供される。
【解決手段】輸送体を所定の箇所に移動させる方法は、可能性のある地上走行ルートのリアルタイムイメージを生成する工程と、リアルタイムイメージを格納されたイメージと比較して、可能性のある地上走行ルートが輸送体の箇所と所定の中継地との間で障害物がないかどうかを判断する工程と、可能性のある地上走行ルートに障害物がなければ、輸送体を中継地に地上走行させる工程を有する。本方法を実行する装置もまた、提供される。
【発明の詳細な説明】
【技術分野】
【0001】
発明の分野
本発明は、輸送体のナビゲーションシステムに関し、特に地上走行経路に沿って無人航空機を制御するナビゲーションシステムに関する。
【背景技術】
【0002】
発明の背景
無人航空機(UAV)は監視及び他の目的に使用されてきた。無人航空機が飛行場で格納される場合、それは一般に滑走路から離れた位置にある。輸送体の離陸を準備するには、離陸位置へ輸送体を地上走行させなければならない。離陸位置に輸送体を移動させるのに必要な時間は、任務遂行にとって重大である。更に、着陸の後、格納される位置に速かに輸送体を戻すことが望ましい。
【0003】
無人飛行機をハンガー及び格納位置から離陸位置に急速に動かし、着陸位置からハンガー即ち保持位置に速かに戻すシステム及び方法を求めるニーズがある。
【発明の開示】
【0004】
発明の要約
本発明は、所定の位置に輸送体を移動させる方法を提供する。
方法は、可能性のある地上走行ルートのリアルタイムイメージを生成する工程と、リアルタイムイメージを格納されたイメージと比較して、可能性のある地上走行ルートが輸送体位置と所定の中継地の間で障害物がないか(clear)を判断する工程と、可能性のある地上走行ルートに障害物がなければ輸送体を中継地へ地上走行させる工程を有する。
【0005】
リアルタイムイメージを、格納されたイメージと比較する工程は、リアルタイムイメージから背景構成を取り除き、背景構成でないイメージ構成を評価してイメージ構成が障害物かどうかを判断する工程を有する。
【0006】
リアルタイムイメージは1又は2以上の視覚的、電気工学的、即ち赤外線センサから供給され得る。地上走行は、輸送体の温度及び速度に応じて制御され得る。
【0007】
別の態様では、本発明は、所定位置に輸送体を移動させる装置を包含する。
装置は、可能性のある地上走行ルートのリアルタイムイメージを生成するセンサ、リアルタイムイメージを格納されたイメージと比較して、可能性のある地上走行ルートが輸送体の位置と所定の中継地の間に障害物がないかどうかを判断するプロセッサ、及び可能性のある地上走行ルートに障害物がない場合、中継地への輸送体を地上走行させる輸送体制御器具を具える。
【発明を実施するための最良の形態】
【0008】
発明の詳細な記載
本発明は、自動で無人航空機(UAV)の地上走行動作を制御する自動システム及び方法を提供する。
自動的地上走行管理装置(ATM)は、滑走路、エプロン及びタールマックに関する情報を利用し、且つ視覚的なリアルタイム、及び/又は電気光学的(EO)、即ち赤外線(IR)入力とその情報を組み合わせて、ルートで遭遇する障害物を回避する地上走行ルートを提供するように設計されている。
【0009】
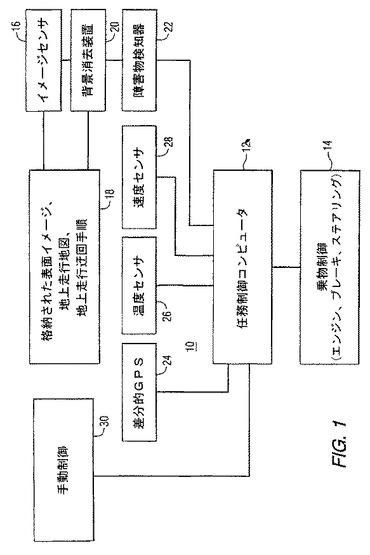
図面を参照すると、図1は、本発明に従って構成されたシステム(10)のブロック図である。任務制御コンピュータ(12)は、輸送体の移動を制御するエンジン、ブレーキ及びステアリングのような種々の輸送体システム(14)を制御するために使用される。
イメージセンサ(16)は飛行場と輸送体の近くの対象物のイメージデータを生成するのに使用される。メモリ素子(18)は、飛行場、地上走行地図及び地上走行迂回手順のイメージを格納するために用いられる。
背景消去装置(20)はイメージデータから背景情報を取り除くのに使用される。障害物検知器(22)は、背景データでないイメージデータの項目を評価して、これらの項目が障害物かどうかを判断する。障害物の情報は、任務コンピュータに送られて、適切な地上走行ルートを決定するのに用いられる。任務制御コンピュータはまた、差分的(differential)全地球測位システム(DGPS)(24)、温度センサ(26)、速度センサ(28)のような他のセンサから入力を受信する。手動制御(30)は任務コンピュータに繋がって、付随的な手動入力を提供する。
手動制御は自動輸送体から離れて位置し、通信リンクによって輸送体の構成要素と通信することができる。例えば、手動制御は発射と回収要素(LRE)中のパイロットステーションに配置され、或いは発射回収無効装置(LROD)を備えた追跡輸送体内に配置される。
LREは主に輸送体の離陸と着陸時に使用される地上管制ステーションである。LRODは、UAVが着陸又は離陸するときに、UAVを追跡するのに用いられるLREに取り付けられた地上の輸送体である。その目的は輸送体が道から外れた場合、輸送体を停止させることである。例えば、人が乗った輸送体がUAVの経路に入れば、LREはUAVの方向を変えて、地上走行速度以上の速度での衝突を回避する。手動制御はまた、輸送体が新しい地上走行ルートを学習し、即ち輸送体が迂回ルートを採らなければならない場合に、輸送体の動作を制御するのに使用され得る。
【0010】
地上走行迂回は、主たるルートから分岐する代替の地上走行ルートである。主たるルート上の障害物を検知すると、又は主たるルートが被害を受けると、輸送体は代替のルートを採り得る。現在のルートが通過にふさわしくない場合のみ、迂回ルートが使用される。ATMは、現在位置から最終位置へ障害のない最短の経路を有するルートを使用する。
2つのルートが唯1つの出発点及び唯1つの終点を有するサーキットを形成する場合、システムは、離れたパイロットから助けてもらうことなく、現在のルートから別の既知のルートへ自動的に迂回することができる。
しかし、ルートに多数の出発点又は終点があれば、輸送体は、1つの既知のルートの中間から別のルートの中間まで、自動的には切り替わらない。この理由は、予測される終点が1つではないことであり、及び多数の出発点があれば、別の出発点からのルートには別のUAVがあるかもしれないからである。離れたパイロットは、障害物に遭遇した既知のルートの中間から、他の既知のルートの中間に輸送体を操縦し、該他の既知のルートの中間にて輸送体はその後、自身で操縦することができる。
【0011】
地上走行時、現在のイメージデータは格納されたイメージデータと比較される。最初に格納されたイメージを得るために、輸送体は手動で操縦者によって作動される。輸送体が地上走行ルートに沿って運行するときは、イメージはイメージセンサを用いて得られる。例えば、イメージセンサは航空機上に取り付けられた、前を見る地上走行ビデオカメラであり得る。
イメージフレームは修正され(georectified)、次に、2次元の(2D)地図イメージへ寄せ集められるであろう。地図イメージは格納手段(18)に格納される。地図上の参照(georeference)タグを加えることができるように、2D地図イメージはGeoTIFFイメージとして格納され得る。
【0012】
地上走行ルートは一連の座標としてATMに入力され得る。その場合、離れた操縦者は、座標によって定義されたルートを横断するように、航空機を制御することができる。停止又は回転地点は夫々中継地になる。中継地は離れた操縦者によって、操縦者の制御ステーションに入力され得る。輸送体が操縦者の操縦命令を感知するとき、輸送体は中継地を学習することができ、又は離れた操縦者の制御ステーションから送信される中継地を受信することができる。
【0013】
多数の地上走行用のイメージが格納手段に格納され得る。1つの寄せ集められたイメージは、地上走行ルート毎に格納される。ヘッディングセンサは輸送体に方向の情報を提供する。ヘッディングセンサは、ホール効果に基づく電子コンパス、又は先導情報を提供する慣性航法ユニットに基づいたジャイロスコープか、レーザーベースの形式を採る。
イメージは、修正に先立って、差分的全地球測位システム(DGPS)による位置及びヘッディング表示器からの情報を各ビデオフレームに使用して参照されるであろう。参照工程にて、DGPSから与えられた位置に相当する、イメージ中のピクセルを見つける。
参照イメージは修正されて、イメージからなる地図を形成し、イメージの各ピクセルはDGPSによって付与された座標に基づくピクセルを調べることができるように、互いに接近して配備される。
【0014】
イメージは、DGPSセンサ及びヘッディングセンサによって供給される情報に基づくイメージセンサの位置をタグする(tagged)ことができる。位置及び方向の情報は、修正された2次元(2D)地図イメージ内へ進められる。イメージを呼び出す際に、輸送体はその位置をDGPS及びヘッディングセンサによって知る。イメージセンサは地上走行ルートの一部の現在の視野を提供する。2D地図イメージは、次に逆修正されて、過去に見たような視野を決定する。システムは、現在のイメージ及び逆修正されたイメージを処理して、背景構成を除去する。
【0015】
背景を消去するのに2つの技術が用いられる。両技術はイメージの比較に依存する。第1の技術は、イメージセンサから、同じ視野地点を表すようにシフトされた2つの連続イメージを引き出す。これらのフレームは、ビデオセンサから来るリアルタイムのフレームである。結果としてのイメージは、静止したイメージ部分の全てについて黒く表示し、フレーム間の時間間隔内で動いた全ての構成について明るい領域で表示される。
【0016】
第2の技術は、格納された2D地図イメージ内の合成したフレームから観察されたリアルタイムフレームを引き出す。フレームの引き出しによって生成されたデルタフレームは次に、エッジを検知するカーネルを備えた畳み込みによってエッジについて処理される。
その後、得られたエッジは分析されて、それらが輸送体を損傷するかもしれない堅く構成された対象物を表しているか、又は雪粒、葉、又はゴミのような重要でない構成を表しているかを決定する。両方の技術はリアルタイムで動く物体を検知するのに用いられ、第2の技術は静止した障害物を検知するのに用いられる。硬軟対象物を検知することにより、経路を妨害する物体と、経路を妨害しない物体の差を検知することができる。
例えば、柔軟な物体は動く葉又は雪の積み重ねであり得る一方、堅い物体は木箱のような一層堅い剛体であり得る。背景ではないイメージの部分の光学的流れ(optical flow)を処理することによって、差が検知され得る。
光学的流れが剛体のようであれば、即ち、イメージの部分が設定された互いの向きを常に維持する場合、物体は剛体であると決定される。しかし、イメージがまわりに吹く葉の塊である場合、葉は設定された互いの向きを維持せず、物体は軟体であると決定される。
このようにして、表面の物体の一片がどのように流れるかを観察することによって、物体が柔軟又は堅い物体として分類することができる。
【0017】
センサによって検知されたイメージは、センサがイメージすることができる視野の直近領域に制限され得て、該領域は輸送体の翼幅の2倍を包含する。進むことが安全でないことをATMが決定した後、障害物はただ識別されるだけであり、離隔地の操縦者が介入し、案内又は迂回ルートを提供することができる。それらの物体が移動しているならば、ATMシステムは単に物体を追跡するだけである。これは、連続した2つのイメージフレーム間の違いをとり、次に、動いているオブジェクトが存在するかどうか判断するためにイメージの差内のエッジの統計的分析を行うことによりなされる。動きの検知は、背景に対して動いている物体に対してのみ用いられ、輸送体に対して動いている物体については用いられない。
【0018】
ビデオセンサ内の現在のイメージが、既知の視野と一致しないか、堅い動いている物体がフレーム差分化によって検知される場合、離隔地の操縦者から進行に安全である信号が与えられるまで、乗り物は止まる。しかし、輸送体が別の既知のルートへ切り替わることができる場合、「進行に安全」信号は必要ではない。
輸送体が、その既知の地上走行ルートのうち、1つについては進むことができない場合、離れた操縦者はATMを無効にし、迂回操作で輸送体を操縦する。迂回操作中に、輸送体は、格納された2D地図イメージを新たなイメージ及び迂回操作にて経験した位置に更新し続ける。
【0019】
障害物の検知に加えて、安全な操縦についての決定をするために、システムは気温及び速度データをも用いることができる。例えば、気温が氷点下ならば速度は減速し、ブレーキは滑りを防ぐように調節される。速度データはまた、方向を変更するために使用される回転半径を調整するために使用され得る。速度は、一般にセンサの感知領域内に停止することができるものに制限されている。
【0020】
IRセンサによって観察された温度勾配を標準化するのを支援するために温度センサが使用され得る。システムは、空港で通常見られる地上の設備の熱のクロスオーバー温度を提供する参照テーブルを含み得る。熱のクロスオーバー温度とは、物体がその背景として正確な温度を持ち、従って熱センサによって観察された時、検知できる差異がない温度である。地上の設備がそのような箇所にあり、温度が熱のクロスオーバーにある場合、それは検知できないかもしれない。障害物を識別するのに役立つ付属物センサとして、他のセンサとともに、IRセンサが或いは使用され得る。
【0021】
所望の目的地は、GPSの座標によって、現在の輸送体位置を目的地位置と比較することにより決定される。更に、ヘッディングセンサ(ホール効果又は慣性航法のユニットからの)が輸送体が適切な方向に向けられていることを確かめるために参考とされる。
【0022】
1以上のイメージセンサが使用され得る。そのようなセンサは、翼の両先端部、ノーズ及び/又は輸送体のテイルに取り付けることができ、回転操作されることができる。他の波長からの情報が、可視的イメージに代えて、又は可視的イメージに加えて用いられ得る。制御ロジックの修正は、他の波長からの情報を受け入れるのに必要な変更のみである。
【0023】
査察目的に使用される無人航空機は、査察任務に使用されるIRセンサ及び/又は電気光学的センサを有することができる。査察任務に使用されるIRセンサ又は電気光学的センサが、地上走行に対して二重の目的を帯びると、新たな組のレンズがより接近した焦点を付与するのに必要であり、センサを前に回転させる機構も必要である。
IRセンサが地上走行専用のセンサならば、IRセンサを光学的イメージセンサに代替するのに制御ロジックの変更のみが必要である。ビデオセンサはEOセンサであるから、EOセンサを光学的センサに代替するのに変更は要求されない。
【0024】
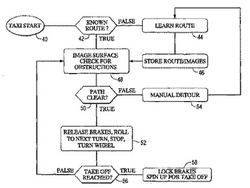
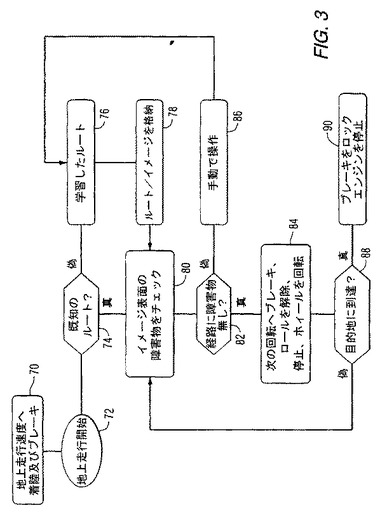
図2は、離陸のため地上走行する方法を示す流れ図である。
方法は、ブロック(40)によって示されるような格納位置にある輸送体から開始する。ブロック(42)は、提案された地上走行ルートについての問い合わせを示す。
既知のルートが使用されない場合、ブロック(44)に示されるように、ルートが学習されなければならない。輸送体に新たなルートを教えるために、操縦者は、輸送体を新たなルートに沿って方向付けるために、リモートコントロールを使用することができる。
輸送体が新たなルートを横断すると、輸送体は新たなルートのイメージを格納する。ブロック(46)に示されるように、後の操縦で使用される新しいルートイメージが格納される。新たなルートが学習された後、又は既知のルートが使用されることになっている場合、ブロック(48)は格納されたルートのイメージは、障害物をチェックすべく、イメージセンサによって供給されたリアルタイムのイメージと結合される。ブロック(50)は、経路に障害物がないか問い合わせをする。障害物がなければ、輸送体はブロック(52)で示されるように、次の決定地点に移動する。決定地点は、地上走行ルートに沿った中継地に相当し得る。
経路に障害物があれば、ブロック(54)に示すように、手動で迂回することが実施され、代替ルートは格納されたルートイメージを更新するために使用される。ブロック(56)に示されるように、離陸位置に到達している場合、輸送体はブロック(58)に示す離陸に対して準備される。そうでなければ、障害物をチェックすべく、格納されたイメージは、リアルタイムイメージと再び比較される。
【0025】
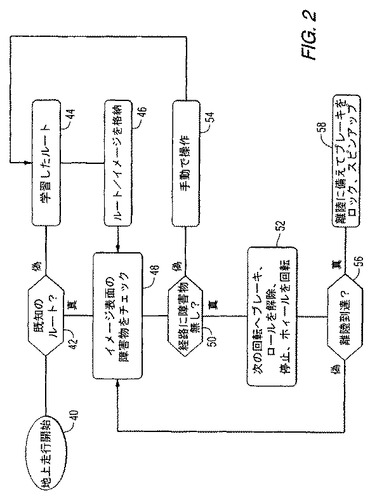
図3は、着陸後に地上走行の方法を示す工程流れ図である。輸送体が着陸し、地上走行速度を遅くした後に(ブロック(70))、地上走行工程はブロック(72)に示すように開始する。ブロック(74)は提案された地上走行ルートについての問い合わせを示す。既知のルートが使用されていなければ、ルートはブロック(76)に示すように学習されなければならない。ルートが学習されると、ブロック(78)に示すように、後の操縦で使用されるルートイメージが格納される。新たなルートが学習された後、又は既知のルートが使用されるべきならば、ブロック(80)は、格納されたイメージ及びイメージセンサによって供給されるリアルタイムイメージは障害物をチェックするように処理される。
ブロック(82)は、経路に障害物がないかどうかについての問い合わせを示す。障害物がなければ、輸送体はブロック(84)に示す次の決定地点に移動され得る。経路に障害物が有れば、ブロック(86)に示すように、手動での迂回を実施することができ、代替ルートは格納されたルートイメージを更新するのに使用される。ブロック(88)に示すように、目的地に到達したならば、輸送体はブロック(90)に示すように停止する(shut down)。そうでなければ、格納されたイメージ及びリアルタイムイメージが再び処理されて、障害物をチェックする。
【0026】
UAVが着陸すると、中継地に到着するのに要求される回転数が最小である最寄りの中継地を探す。通路の終端に沿って多数の中継地を設定することにより、UAVは地上走行ネットワークに入るのに回転することなく、最寄りの地点に繋がる。
【0027】
ATMは、有効で障害物のない地上走行経路及び他の輸送体あるいは被害を受けた走路によって閉鎖される経路を識別するために、イメージ処理及び自動的な目標認識技術を使用する。現在の経路が走路領域の格納された経路のように見えるかどうか判断するために、システムは現在のイメージを格納されたイメージと比較する。
格納された経路に見えるならば、その後、システムは、現在の経路と既知の経路の間の差が、潜在的なIR影、太陽/月の影、雨、雪又は他の良性の障害物によるものか、又はこの差がタールマックの損傷或いは脱落、又は地上の輸送体或いは他の堅い障害物の存在によるものかを判断する。
【0028】
ATMは、輸送体が空港と走路の周りを移動する自動手段を提供する。背景の認識は前景の障害物と、輸送体が進行しようとする地表面の損傷を示すのに使用され得る。
中継地から中継地に移る決定およびその地点での速度は、イメージセンサ、温度センサ及び速度センサからの入力に基づく。正確な位置は差分的GPSによって供給される。差分的GPSは、既知の中継地にて回転地点の正確な位置を提供する。
【0029】
地上にて、イメージセンサが、水平の視野を集めるのに用いられ、該視野は障害物のない経路が判った修正されたイメージと後で比較される。経路に障害物がない場合、温度センサーが安全速度及び停止までに予測される距離を決定するのに参照される。障害物又は損傷した表面の周りで迂回するのに役立つべく、リモート入力が輸送体に供給される。
以前に用いられた地上走行ルートは、整合する修正したイメージ地図と一緒に、輸送体間で共有されて、1つの輸送体のみが障害物の周りを案内される必要があり、他の輸送体は迂回についての知識を獲得する。
システムは、さらにフレーム差分、及びフレーム差分後に残るエッジパターンの統計的分析によって速く動いている物体を検知する。
【0030】
システムは、飛行により及び水平イメージセンサからの入力から、自動的に修正された参照イメージを生成する。これは空港の上を飛び、イメージを撮って、斜めの視野を天頂からの視野と比較することにより、又は斜めの視野を修正して天頂からの視野を作成することにより、生成することができる。飛行中に撮られたイメージは、(上記の離れた操縦者からの教示に代えて)ATMに新たな地上走行ルートを教示するのに用いられる。
着陸の後にどこに駐まらなければならないかをUAVが知っていれば、UAVは、イメージを用いて離れた操縦者へルートを提案することができる。空港の中には道と平行な地上走行ルートを有するものがあるので、離れた操縦者への提案は必要である。
その場合、離れた操縦者は、UAVが公道を使用して、駐機スペースを得ることを確実にするであろう。
【0031】
ATMシステムは、電気光学的、赤外線及び合成開口レーダーを含むイメージング装置の全てのスペクトルを使用することができる。ATMシステムは、常に入力イメージを分析し、ルートの個々の区間が妨害されているかを判断する。
【0032】
ATMは、障害即ち参照物体が僅か或いは存在しない状況を扱い、速く移動する障害物を検知できる一方、凹み穴及び静止した障害物をも検知する。
システムは、両方のセンサ入力及び学習したルートに基づいて、システム自身の地図を構築する。空港に着陸する前に空港はイメージ化されて、自然に修正された参照イメージを得る。予めロードされた地図は不要である。システムは進行するに伴って、地図を構築する。
【0033】
システムは、ローカル及び遠隔メモリ、及び共有メモリの両方を使用する。
遠隔メモリは、離れた操縦者によってもたらされる。共有メモリは他の乗り物、又は固定したセンサからもたらされ得る。各UAVは、経験したルートのメモリを有する。他のUAVは、この情報を用いて、新たなルートを得る。一旦、1つのUAVが空港で如何に地上走行するかを学習すると、そのサイズクラスでの他の全てのUAVは、最初に来た同じ空港の周りを地上走行する知識を共有することができる。
共有メモリは、分配されるように働く。全てのUAVは、その周りを地上走行した空港についての地上走行ルートを記憶している。UAVが以前に地上走行していない空港へ来ると、以前に空港に着陸した他のUAV によって用いられた地上走行ルートを他のUAV、又は地上制御ステーションに問い合わせる。従って、1つのUAVだけが新たな地上走行ルートを教示され、他のUAVは最初のUAVの経験から学習する。
【0034】
修正及び逆修正は比較分析に使用される。システムは、標準的な空港の背景及び表面を認識し除去することができる。背景ではない全てのイメージ物体は、障害物であると評価される。
温度、速度及び障害物の入力は、経路に障害物がないかどうかを決定すべく、任務制御コンピュータに供給される。速度は回転するのに安全かどうか判断するために使用される。任務制御コンピュータはエンジン、ブレーキ及びステアリングに、ルートに沿って航空機を動かして進路変更(turn to turn)させる。ルートが未知であって、障害物に出会すと、教示の入力は、手動制御によって入力される。
【0035】
発明は幾つかの実施例について記載されてきたが、以下の請求の範囲に示した発明の範囲から離れることなく、開示された実施例に種々の変更が為され得ることは当業者ならば明白であろう。
【図面の簡単な説明】
【0036】
【図1】発明に従って構成された地上走行管理システムのブロック図である。
【図2】離陸のため地上走行する方法を示す工程のフロー図である。
【図3】着陸の後に地上走行する方法を示す工程のフロー図である。
【技術分野】
【0001】
発明の分野
本発明は、輸送体のナビゲーションシステムに関し、特に地上走行経路に沿って無人航空機を制御するナビゲーションシステムに関する。
【背景技術】
【0002】
発明の背景
無人航空機(UAV)は監視及び他の目的に使用されてきた。無人航空機が飛行場で格納される場合、それは一般に滑走路から離れた位置にある。輸送体の離陸を準備するには、離陸位置へ輸送体を地上走行させなければならない。離陸位置に輸送体を移動させるのに必要な時間は、任務遂行にとって重大である。更に、着陸の後、格納される位置に速かに輸送体を戻すことが望ましい。
【0003】
無人飛行機をハンガー及び格納位置から離陸位置に急速に動かし、着陸位置からハンガー即ち保持位置に速かに戻すシステム及び方法を求めるニーズがある。
【発明の開示】
【0004】
発明の要約
本発明は、所定の位置に輸送体を移動させる方法を提供する。
方法は、可能性のある地上走行ルートのリアルタイムイメージを生成する工程と、リアルタイムイメージを格納されたイメージと比較して、可能性のある地上走行ルートが輸送体位置と所定の中継地の間で障害物がないか(clear)を判断する工程と、可能性のある地上走行ルートに障害物がなければ輸送体を中継地へ地上走行させる工程を有する。
【0005】
リアルタイムイメージを、格納されたイメージと比較する工程は、リアルタイムイメージから背景構成を取り除き、背景構成でないイメージ構成を評価してイメージ構成が障害物かどうかを判断する工程を有する。
【0006】
リアルタイムイメージは1又は2以上の視覚的、電気工学的、即ち赤外線センサから供給され得る。地上走行は、輸送体の温度及び速度に応じて制御され得る。
【0007】
別の態様では、本発明は、所定位置に輸送体を移動させる装置を包含する。
装置は、可能性のある地上走行ルートのリアルタイムイメージを生成するセンサ、リアルタイムイメージを格納されたイメージと比較して、可能性のある地上走行ルートが輸送体の位置と所定の中継地の間に障害物がないかどうかを判断するプロセッサ、及び可能性のある地上走行ルートに障害物がない場合、中継地への輸送体を地上走行させる輸送体制御器具を具える。
【発明を実施するための最良の形態】
【0008】
発明の詳細な記載
本発明は、自動で無人航空機(UAV)の地上走行動作を制御する自動システム及び方法を提供する。
自動的地上走行管理装置(ATM)は、滑走路、エプロン及びタールマックに関する情報を利用し、且つ視覚的なリアルタイム、及び/又は電気光学的(EO)、即ち赤外線(IR)入力とその情報を組み合わせて、ルートで遭遇する障害物を回避する地上走行ルートを提供するように設計されている。
【0009】
図面を参照すると、図1は、本発明に従って構成されたシステム(10)のブロック図である。任務制御コンピュータ(12)は、輸送体の移動を制御するエンジン、ブレーキ及びステアリングのような種々の輸送体システム(14)を制御するために使用される。
イメージセンサ(16)は飛行場と輸送体の近くの対象物のイメージデータを生成するのに使用される。メモリ素子(18)は、飛行場、地上走行地図及び地上走行迂回手順のイメージを格納するために用いられる。
背景消去装置(20)はイメージデータから背景情報を取り除くのに使用される。障害物検知器(22)は、背景データでないイメージデータの項目を評価して、これらの項目が障害物かどうかを判断する。障害物の情報は、任務コンピュータに送られて、適切な地上走行ルートを決定するのに用いられる。任務制御コンピュータはまた、差分的(differential)全地球測位システム(DGPS)(24)、温度センサ(26)、速度センサ(28)のような他のセンサから入力を受信する。手動制御(30)は任務コンピュータに繋がって、付随的な手動入力を提供する。
手動制御は自動輸送体から離れて位置し、通信リンクによって輸送体の構成要素と通信することができる。例えば、手動制御は発射と回収要素(LRE)中のパイロットステーションに配置され、或いは発射回収無効装置(LROD)を備えた追跡輸送体内に配置される。
LREは主に輸送体の離陸と着陸時に使用される地上管制ステーションである。LRODは、UAVが着陸又は離陸するときに、UAVを追跡するのに用いられるLREに取り付けられた地上の輸送体である。その目的は輸送体が道から外れた場合、輸送体を停止させることである。例えば、人が乗った輸送体がUAVの経路に入れば、LREはUAVの方向を変えて、地上走行速度以上の速度での衝突を回避する。手動制御はまた、輸送体が新しい地上走行ルートを学習し、即ち輸送体が迂回ルートを採らなければならない場合に、輸送体の動作を制御するのに使用され得る。
【0010】
地上走行迂回は、主たるルートから分岐する代替の地上走行ルートである。主たるルート上の障害物を検知すると、又は主たるルートが被害を受けると、輸送体は代替のルートを採り得る。現在のルートが通過にふさわしくない場合のみ、迂回ルートが使用される。ATMは、現在位置から最終位置へ障害のない最短の経路を有するルートを使用する。
2つのルートが唯1つの出発点及び唯1つの終点を有するサーキットを形成する場合、システムは、離れたパイロットから助けてもらうことなく、現在のルートから別の既知のルートへ自動的に迂回することができる。
しかし、ルートに多数の出発点又は終点があれば、輸送体は、1つの既知のルートの中間から別のルートの中間まで、自動的には切り替わらない。この理由は、予測される終点が1つではないことであり、及び多数の出発点があれば、別の出発点からのルートには別のUAVがあるかもしれないからである。離れたパイロットは、障害物に遭遇した既知のルートの中間から、他の既知のルートの中間に輸送体を操縦し、該他の既知のルートの中間にて輸送体はその後、自身で操縦することができる。
【0011】
地上走行時、現在のイメージデータは格納されたイメージデータと比較される。最初に格納されたイメージを得るために、輸送体は手動で操縦者によって作動される。輸送体が地上走行ルートに沿って運行するときは、イメージはイメージセンサを用いて得られる。例えば、イメージセンサは航空機上に取り付けられた、前を見る地上走行ビデオカメラであり得る。
イメージフレームは修正され(georectified)、次に、2次元の(2D)地図イメージへ寄せ集められるであろう。地図イメージは格納手段(18)に格納される。地図上の参照(georeference)タグを加えることができるように、2D地図イメージはGeoTIFFイメージとして格納され得る。
【0012】
地上走行ルートは一連の座標としてATMに入力され得る。その場合、離れた操縦者は、座標によって定義されたルートを横断するように、航空機を制御することができる。停止又は回転地点は夫々中継地になる。中継地は離れた操縦者によって、操縦者の制御ステーションに入力され得る。輸送体が操縦者の操縦命令を感知するとき、輸送体は中継地を学習することができ、又は離れた操縦者の制御ステーションから送信される中継地を受信することができる。
【0013】
多数の地上走行用のイメージが格納手段に格納され得る。1つの寄せ集められたイメージは、地上走行ルート毎に格納される。ヘッディングセンサは輸送体に方向の情報を提供する。ヘッディングセンサは、ホール効果に基づく電子コンパス、又は先導情報を提供する慣性航法ユニットに基づいたジャイロスコープか、レーザーベースの形式を採る。
イメージは、修正に先立って、差分的全地球測位システム(DGPS)による位置及びヘッディング表示器からの情報を各ビデオフレームに使用して参照されるであろう。参照工程にて、DGPSから与えられた位置に相当する、イメージ中のピクセルを見つける。
参照イメージは修正されて、イメージからなる地図を形成し、イメージの各ピクセルはDGPSによって付与された座標に基づくピクセルを調べることができるように、互いに接近して配備される。
【0014】
イメージは、DGPSセンサ及びヘッディングセンサによって供給される情報に基づくイメージセンサの位置をタグする(tagged)ことができる。位置及び方向の情報は、修正された2次元(2D)地図イメージ内へ進められる。イメージを呼び出す際に、輸送体はその位置をDGPS及びヘッディングセンサによって知る。イメージセンサは地上走行ルートの一部の現在の視野を提供する。2D地図イメージは、次に逆修正されて、過去に見たような視野を決定する。システムは、現在のイメージ及び逆修正されたイメージを処理して、背景構成を除去する。
【0015】
背景を消去するのに2つの技術が用いられる。両技術はイメージの比較に依存する。第1の技術は、イメージセンサから、同じ視野地点を表すようにシフトされた2つの連続イメージを引き出す。これらのフレームは、ビデオセンサから来るリアルタイムのフレームである。結果としてのイメージは、静止したイメージ部分の全てについて黒く表示し、フレーム間の時間間隔内で動いた全ての構成について明るい領域で表示される。
【0016】
第2の技術は、格納された2D地図イメージ内の合成したフレームから観察されたリアルタイムフレームを引き出す。フレームの引き出しによって生成されたデルタフレームは次に、エッジを検知するカーネルを備えた畳み込みによってエッジについて処理される。
その後、得られたエッジは分析されて、それらが輸送体を損傷するかもしれない堅く構成された対象物を表しているか、又は雪粒、葉、又はゴミのような重要でない構成を表しているかを決定する。両方の技術はリアルタイムで動く物体を検知するのに用いられ、第2の技術は静止した障害物を検知するのに用いられる。硬軟対象物を検知することにより、経路を妨害する物体と、経路を妨害しない物体の差を検知することができる。
例えば、柔軟な物体は動く葉又は雪の積み重ねであり得る一方、堅い物体は木箱のような一層堅い剛体であり得る。背景ではないイメージの部分の光学的流れ(optical flow)を処理することによって、差が検知され得る。
光学的流れが剛体のようであれば、即ち、イメージの部分が設定された互いの向きを常に維持する場合、物体は剛体であると決定される。しかし、イメージがまわりに吹く葉の塊である場合、葉は設定された互いの向きを維持せず、物体は軟体であると決定される。
このようにして、表面の物体の一片がどのように流れるかを観察することによって、物体が柔軟又は堅い物体として分類することができる。
【0017】
センサによって検知されたイメージは、センサがイメージすることができる視野の直近領域に制限され得て、該領域は輸送体の翼幅の2倍を包含する。進むことが安全でないことをATMが決定した後、障害物はただ識別されるだけであり、離隔地の操縦者が介入し、案内又は迂回ルートを提供することができる。それらの物体が移動しているならば、ATMシステムは単に物体を追跡するだけである。これは、連続した2つのイメージフレーム間の違いをとり、次に、動いているオブジェクトが存在するかどうか判断するためにイメージの差内のエッジの統計的分析を行うことによりなされる。動きの検知は、背景に対して動いている物体に対してのみ用いられ、輸送体に対して動いている物体については用いられない。
【0018】
ビデオセンサ内の現在のイメージが、既知の視野と一致しないか、堅い動いている物体がフレーム差分化によって検知される場合、離隔地の操縦者から進行に安全である信号が与えられるまで、乗り物は止まる。しかし、輸送体が別の既知のルートへ切り替わることができる場合、「進行に安全」信号は必要ではない。
輸送体が、その既知の地上走行ルートのうち、1つについては進むことができない場合、離れた操縦者はATMを無効にし、迂回操作で輸送体を操縦する。迂回操作中に、輸送体は、格納された2D地図イメージを新たなイメージ及び迂回操作にて経験した位置に更新し続ける。
【0019】
障害物の検知に加えて、安全な操縦についての決定をするために、システムは気温及び速度データをも用いることができる。例えば、気温が氷点下ならば速度は減速し、ブレーキは滑りを防ぐように調節される。速度データはまた、方向を変更するために使用される回転半径を調整するために使用され得る。速度は、一般にセンサの感知領域内に停止することができるものに制限されている。
【0020】
IRセンサによって観察された温度勾配を標準化するのを支援するために温度センサが使用され得る。システムは、空港で通常見られる地上の設備の熱のクロスオーバー温度を提供する参照テーブルを含み得る。熱のクロスオーバー温度とは、物体がその背景として正確な温度を持ち、従って熱センサによって観察された時、検知できる差異がない温度である。地上の設備がそのような箇所にあり、温度が熱のクロスオーバーにある場合、それは検知できないかもしれない。障害物を識別するのに役立つ付属物センサとして、他のセンサとともに、IRセンサが或いは使用され得る。
【0021】
所望の目的地は、GPSの座標によって、現在の輸送体位置を目的地位置と比較することにより決定される。更に、ヘッディングセンサ(ホール効果又は慣性航法のユニットからの)が輸送体が適切な方向に向けられていることを確かめるために参考とされる。
【0022】
1以上のイメージセンサが使用され得る。そのようなセンサは、翼の両先端部、ノーズ及び/又は輸送体のテイルに取り付けることができ、回転操作されることができる。他の波長からの情報が、可視的イメージに代えて、又は可視的イメージに加えて用いられ得る。制御ロジックの修正は、他の波長からの情報を受け入れるのに必要な変更のみである。
【0023】
査察目的に使用される無人航空機は、査察任務に使用されるIRセンサ及び/又は電気光学的センサを有することができる。査察任務に使用されるIRセンサ又は電気光学的センサが、地上走行に対して二重の目的を帯びると、新たな組のレンズがより接近した焦点を付与するのに必要であり、センサを前に回転させる機構も必要である。
IRセンサが地上走行専用のセンサならば、IRセンサを光学的イメージセンサに代替するのに制御ロジックの変更のみが必要である。ビデオセンサはEOセンサであるから、EOセンサを光学的センサに代替するのに変更は要求されない。
【0024】
図2は、離陸のため地上走行する方法を示す流れ図である。
方法は、ブロック(40)によって示されるような格納位置にある輸送体から開始する。ブロック(42)は、提案された地上走行ルートについての問い合わせを示す。
既知のルートが使用されない場合、ブロック(44)に示されるように、ルートが学習されなければならない。輸送体に新たなルートを教えるために、操縦者は、輸送体を新たなルートに沿って方向付けるために、リモートコントロールを使用することができる。
輸送体が新たなルートを横断すると、輸送体は新たなルートのイメージを格納する。ブロック(46)に示されるように、後の操縦で使用される新しいルートイメージが格納される。新たなルートが学習された後、又は既知のルートが使用されることになっている場合、ブロック(48)は格納されたルートのイメージは、障害物をチェックすべく、イメージセンサによって供給されたリアルタイムのイメージと結合される。ブロック(50)は、経路に障害物がないか問い合わせをする。障害物がなければ、輸送体はブロック(52)で示されるように、次の決定地点に移動する。決定地点は、地上走行ルートに沿った中継地に相当し得る。
経路に障害物があれば、ブロック(54)に示すように、手動で迂回することが実施され、代替ルートは格納されたルートイメージを更新するために使用される。ブロック(56)に示されるように、離陸位置に到達している場合、輸送体はブロック(58)に示す離陸に対して準備される。そうでなければ、障害物をチェックすべく、格納されたイメージは、リアルタイムイメージと再び比較される。
【0025】
図3は、着陸後に地上走行の方法を示す工程流れ図である。輸送体が着陸し、地上走行速度を遅くした後に(ブロック(70))、地上走行工程はブロック(72)に示すように開始する。ブロック(74)は提案された地上走行ルートについての問い合わせを示す。既知のルートが使用されていなければ、ルートはブロック(76)に示すように学習されなければならない。ルートが学習されると、ブロック(78)に示すように、後の操縦で使用されるルートイメージが格納される。新たなルートが学習された後、又は既知のルートが使用されるべきならば、ブロック(80)は、格納されたイメージ及びイメージセンサによって供給されるリアルタイムイメージは障害物をチェックするように処理される。
ブロック(82)は、経路に障害物がないかどうかについての問い合わせを示す。障害物がなければ、輸送体はブロック(84)に示す次の決定地点に移動され得る。経路に障害物が有れば、ブロック(86)に示すように、手動での迂回を実施することができ、代替ルートは格納されたルートイメージを更新するのに使用される。ブロック(88)に示すように、目的地に到達したならば、輸送体はブロック(90)に示すように停止する(shut down)。そうでなければ、格納されたイメージ及びリアルタイムイメージが再び処理されて、障害物をチェックする。
【0026】
UAVが着陸すると、中継地に到着するのに要求される回転数が最小である最寄りの中継地を探す。通路の終端に沿って多数の中継地を設定することにより、UAVは地上走行ネットワークに入るのに回転することなく、最寄りの地点に繋がる。
【0027】
ATMは、有効で障害物のない地上走行経路及び他の輸送体あるいは被害を受けた走路によって閉鎖される経路を識別するために、イメージ処理及び自動的な目標認識技術を使用する。現在の経路が走路領域の格納された経路のように見えるかどうか判断するために、システムは現在のイメージを格納されたイメージと比較する。
格納された経路に見えるならば、その後、システムは、現在の経路と既知の経路の間の差が、潜在的なIR影、太陽/月の影、雨、雪又は他の良性の障害物によるものか、又はこの差がタールマックの損傷或いは脱落、又は地上の輸送体或いは他の堅い障害物の存在によるものかを判断する。
【0028】
ATMは、輸送体が空港と走路の周りを移動する自動手段を提供する。背景の認識は前景の障害物と、輸送体が進行しようとする地表面の損傷を示すのに使用され得る。
中継地から中継地に移る決定およびその地点での速度は、イメージセンサ、温度センサ及び速度センサからの入力に基づく。正確な位置は差分的GPSによって供給される。差分的GPSは、既知の中継地にて回転地点の正確な位置を提供する。
【0029】
地上にて、イメージセンサが、水平の視野を集めるのに用いられ、該視野は障害物のない経路が判った修正されたイメージと後で比較される。経路に障害物がない場合、温度センサーが安全速度及び停止までに予測される距離を決定するのに参照される。障害物又は損傷した表面の周りで迂回するのに役立つべく、リモート入力が輸送体に供給される。
以前に用いられた地上走行ルートは、整合する修正したイメージ地図と一緒に、輸送体間で共有されて、1つの輸送体のみが障害物の周りを案内される必要があり、他の輸送体は迂回についての知識を獲得する。
システムは、さらにフレーム差分、及びフレーム差分後に残るエッジパターンの統計的分析によって速く動いている物体を検知する。
【0030】
システムは、飛行により及び水平イメージセンサからの入力から、自動的に修正された参照イメージを生成する。これは空港の上を飛び、イメージを撮って、斜めの視野を天頂からの視野と比較することにより、又は斜めの視野を修正して天頂からの視野を作成することにより、生成することができる。飛行中に撮られたイメージは、(上記の離れた操縦者からの教示に代えて)ATMに新たな地上走行ルートを教示するのに用いられる。
着陸の後にどこに駐まらなければならないかをUAVが知っていれば、UAVは、イメージを用いて離れた操縦者へルートを提案することができる。空港の中には道と平行な地上走行ルートを有するものがあるので、離れた操縦者への提案は必要である。
その場合、離れた操縦者は、UAVが公道を使用して、駐機スペースを得ることを確実にするであろう。
【0031】
ATMシステムは、電気光学的、赤外線及び合成開口レーダーを含むイメージング装置の全てのスペクトルを使用することができる。ATMシステムは、常に入力イメージを分析し、ルートの個々の区間が妨害されているかを判断する。
【0032】
ATMは、障害即ち参照物体が僅か或いは存在しない状況を扱い、速く移動する障害物を検知できる一方、凹み穴及び静止した障害物をも検知する。
システムは、両方のセンサ入力及び学習したルートに基づいて、システム自身の地図を構築する。空港に着陸する前に空港はイメージ化されて、自然に修正された参照イメージを得る。予めロードされた地図は不要である。システムは進行するに伴って、地図を構築する。
【0033】
システムは、ローカル及び遠隔メモリ、及び共有メモリの両方を使用する。
遠隔メモリは、離れた操縦者によってもたらされる。共有メモリは他の乗り物、又は固定したセンサからもたらされ得る。各UAVは、経験したルートのメモリを有する。他のUAVは、この情報を用いて、新たなルートを得る。一旦、1つのUAVが空港で如何に地上走行するかを学習すると、そのサイズクラスでの他の全てのUAVは、最初に来た同じ空港の周りを地上走行する知識を共有することができる。
共有メモリは、分配されるように働く。全てのUAVは、その周りを地上走行した空港についての地上走行ルートを記憶している。UAVが以前に地上走行していない空港へ来ると、以前に空港に着陸した他のUAV によって用いられた地上走行ルートを他のUAV、又は地上制御ステーションに問い合わせる。従って、1つのUAVだけが新たな地上走行ルートを教示され、他のUAVは最初のUAVの経験から学習する。
【0034】
修正及び逆修正は比較分析に使用される。システムは、標準的な空港の背景及び表面を認識し除去することができる。背景ではない全てのイメージ物体は、障害物であると評価される。
温度、速度及び障害物の入力は、経路に障害物がないかどうかを決定すべく、任務制御コンピュータに供給される。速度は回転するのに安全かどうか判断するために使用される。任務制御コンピュータはエンジン、ブレーキ及びステアリングに、ルートに沿って航空機を動かして進路変更(turn to turn)させる。ルートが未知であって、障害物に出会すと、教示の入力は、手動制御によって入力される。
【0035】
発明は幾つかの実施例について記載されてきたが、以下の請求の範囲に示した発明の範囲から離れることなく、開示された実施例に種々の変更が為され得ることは当業者ならば明白であろう。
【図面の簡単な説明】
【0036】
【図1】発明に従って構成された地上走行管理システムのブロック図である。
【図2】離陸のため地上走行する方法を示す工程のフロー図である。
【図3】着陸の後に地上走行する方法を示す工程のフロー図である。
【特許請求の範囲】
【請求項1】
輸送体を所定の箇所に移動させる方法であって、
可能性のある地上走行ルートのリアルタイムイメージを生成する工程と、
リアルタイムイメージを格納されたイメージと比較して、可能性のある地上走行ルートが輸送体の箇所と所定の中継地との間で障害物がないかどうかを判断する工程と、
可能性のある地上走行ルートに障害物がなければ、輸送体を中継地に地上走行させる工程を有する方法。
【請求項2】
リアルタイムイメージを格納されたイメージと比較する工程は、
リアルタイムイメージから背景構成を除去する工程と、
背景構成でないイメージ構成を評価して、これらの構成が障害物かどうかを決定する工程を有する、請求項1に記載の方法。
【請求項3】
背景構成を除去する工程は、
一連のイメージフレームから第1のイメージフレームを抜き出すことにより、差分的イメージを生成する工程を有する、請求項2に記載の方法。
【請求項4】
更に、差分的イメージのエッジを分析して、動いている物体が存在しているかどうかを判断する工程を有する、請求項3に記載の方法。
【請求項5】
背景構成を除去する工程は、
格納されたイメージフレームから第1のイメージフレームを抜き出すことにより、差分的イメージを生成する工程を有する、請求項2に記載の方法。
【請求項6】
差分的イメージのエッジを分析して、動いている物体が存在しているかどうかを判断する工程を有する、請求項5に記載の方法。
【請求項7】
格納されたイメージは、修正されたイメージであって、更に、
リアルタイムイメージを格納されたイメージと比較する工程の前に、格納されたイメージを逆に修正する工程を有する、請求項1に記載の方法。
【請求項8】
リアルタイムイメージは、1又は2以上の視覚的、電気光学的、及び赤外線センサによって供給される、請求項1に記載の方法。
【請求項9】
気温及び輸送体の速度に応じて、地上走行工程を制御する工程を有する、請求項1に記載の方法。
【請求項10】
所定箇所へ輸送体を動かす装置であって、
可能性のある地上走行ルートのリアルタイムイメージを生成するセンサと、
リアルタイムイメージを格納されたイメージと比較して、可能性のある地上走行ルートに、輸送体の位置と所定の中継地との間に障害物がないかどうかを判断するプロセッサと、
可能性のある地上走行ルートに障害物がなければ、中継地に輸送体を地上走行させる輸送体制御器具を具える装置。
【請求項11】
プロセッサは、リアルタイムイメージから背景構成を除去し、背景構成でない構成を評価して、これらの構成が障害物かどうかを判断する、請求項10に記載の装置。
【請求項12】
プロセッサは、2つの連続したイメージフレームに基づいて差分的イメージを生成して、差分的イメージ内のエッジを分析して、動いている物体が存在するかどうかを決定する、請求項10に記載の装置。
【請求項13】
プロセッサは、リアルタイムイメージフレーム及び格納されたイメージフレームに基づいて差分的イメージを生成して、差分的イメージ内のエッジを分析して、動いている物体が存在するかどうかを決定する、請求項10に記載の装置。
【請求項14】
格納されたイメージは、修正されたイメージであり、プロセッサは、リアルタイムイメージと格納されたイメージを比較する前に、格納されたイメージを逆修正する、請求項13に記載の装置。
【請求項15】
リアルタイムイメージは、1又は2以上の視覚的、電気光学的、及び赤外線センサによって供給される、請求項10に記載の装置。
【請求項16】
輸送体制御器具は、気温及び輸送体の速度に応じて、輸送体を制御する、請求項10に記載の装置。
【請求項1】
輸送体を所定の箇所に移動させる方法であって、
可能性のある地上走行ルートのリアルタイムイメージを生成する工程と、
リアルタイムイメージを格納されたイメージと比較して、可能性のある地上走行ルートが輸送体の箇所と所定の中継地との間で障害物がないかどうかを判断する工程と、
可能性のある地上走行ルートに障害物がなければ、輸送体を中継地に地上走行させる工程を有する方法。
【請求項2】
リアルタイムイメージを格納されたイメージと比較する工程は、
リアルタイムイメージから背景構成を除去する工程と、
背景構成でないイメージ構成を評価して、これらの構成が障害物かどうかを決定する工程を有する、請求項1に記載の方法。
【請求項3】
背景構成を除去する工程は、
一連のイメージフレームから第1のイメージフレームを抜き出すことにより、差分的イメージを生成する工程を有する、請求項2に記載の方法。
【請求項4】
更に、差分的イメージのエッジを分析して、動いている物体が存在しているかどうかを判断する工程を有する、請求項3に記載の方法。
【請求項5】
背景構成を除去する工程は、
格納されたイメージフレームから第1のイメージフレームを抜き出すことにより、差分的イメージを生成する工程を有する、請求項2に記載の方法。
【請求項6】
差分的イメージのエッジを分析して、動いている物体が存在しているかどうかを判断する工程を有する、請求項5に記載の方法。
【請求項7】
格納されたイメージは、修正されたイメージであって、更に、
リアルタイムイメージを格納されたイメージと比較する工程の前に、格納されたイメージを逆に修正する工程を有する、請求項1に記載の方法。
【請求項8】
リアルタイムイメージは、1又は2以上の視覚的、電気光学的、及び赤外線センサによって供給される、請求項1に記載の方法。
【請求項9】
気温及び輸送体の速度に応じて、地上走行工程を制御する工程を有する、請求項1に記載の方法。
【請求項10】
所定箇所へ輸送体を動かす装置であって、
可能性のある地上走行ルートのリアルタイムイメージを生成するセンサと、
リアルタイムイメージを格納されたイメージと比較して、可能性のある地上走行ルートに、輸送体の位置と所定の中継地との間に障害物がないかどうかを判断するプロセッサと、
可能性のある地上走行ルートに障害物がなければ、中継地に輸送体を地上走行させる輸送体制御器具を具える装置。
【請求項11】
プロセッサは、リアルタイムイメージから背景構成を除去し、背景構成でない構成を評価して、これらの構成が障害物かどうかを判断する、請求項10に記載の装置。
【請求項12】
プロセッサは、2つの連続したイメージフレームに基づいて差分的イメージを生成して、差分的イメージ内のエッジを分析して、動いている物体が存在するかどうかを決定する、請求項10に記載の装置。
【請求項13】
プロセッサは、リアルタイムイメージフレーム及び格納されたイメージフレームに基づいて差分的イメージを生成して、差分的イメージ内のエッジを分析して、動いている物体が存在するかどうかを決定する、請求項10に記載の装置。
【請求項14】
格納されたイメージは、修正されたイメージであり、プロセッサは、リアルタイムイメージと格納されたイメージを比較する前に、格納されたイメージを逆修正する、請求項13に記載の装置。
【請求項15】
リアルタイムイメージは、1又は2以上の視覚的、電気光学的、及び赤外線センサによって供給される、請求項10に記載の装置。
【請求項16】
輸送体制御器具は、気温及び輸送体の速度に応じて、輸送体を制御する、請求項10に記載の装置。
【図1】


【図2】
【図3】
【図2】
【図3】
【公表番号】特表2008−506926(P2008−506926A)
【公表日】平成20年3月6日(2008.3.6)
【国際特許分類】
【出願番号】特願2006−551105(P2006−551105)
【出願日】平成17年1月5日(2005.1.5)
【国際出願番号】PCT/US2005/000148
【国際公開番号】WO2005/124721
【国際公開日】平成17年12月29日(2005.12.29)
【出願人】(502270453)ノースロップ グラマン コーポレイション (31)
【Fターム(参考)】
【公表日】平成20年3月6日(2008.3.6)
【国際特許分類】
【出願日】平成17年1月5日(2005.1.5)
【国際出願番号】PCT/US2005/000148
【国際公開番号】WO2005/124721
【国際公開日】平成17年12月29日(2005.12.29)
【出願人】(502270453)ノースロップ グラマン コーポレイション (31)
【Fターム(参考)】
[ Back to top ]