
自動変速機
【課題】ビジーシフトの発生を抑制するとともに、変速回数を低減しクラッチ機構やシフト機構の負荷を低減することが可能な自動変速機を提供することを目的とする。
【解決手段】自動変速機1は、シフト機構70a〜70dを動作させるとともに、変速指令が送出されるとクラッチ機構30の係合状態を切り換えて変速指令に応じた変速制御を実行する変速制御装置80を備える。変速制御装置80は、変速指令が送出された際に、当該変速指令に応じた変速制御に要するシフト時間Psと現在から次回の変速指令が送出されるまでの次指令時間Pnとを算出し、シフト時間Psが次指令時間Pnよりも長い場合には待機時間Pwだけ変速制御の実行を待機する。
【解決手段】自動変速機1は、シフト機構70a〜70dを動作させるとともに、変速指令が送出されるとクラッチ機構30の係合状態を切り換えて変速指令に応じた変速制御を実行する変速制御装置80を備える。変速制御装置80は、変速指令が送出された際に、当該変速指令に応じた変速制御に要するシフト時間Psと現在から次回の変速指令が送出されるまでの次指令時間Pnとを算出し、シフト時間Psが次指令時間Pnよりも長い場合には待機時間Pwだけ変速制御の実行を待機する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両状態に応じて自動変速を行う自動変速機に関するものである。
【背景技術】
【0002】
自動変速機は、車両に搭載されたエンジンなどの原動機が出力する回転駆動力を自動で変速する装置として用いられている。そして、自動変速機は、変速指令が送出されると、シフト機構およびクラッチ機構を動作させて変速指令に応じた変速制御を行う。また、自動変速機として、例えば、特許文献1には、複数のクラッチを備えるデュアルクラッチ式自動変速機が開示されている。このデュアルクラッチ式自動変速機は、変速予定の変速段を予め成立させておき、変速指令が送出された場合に、複数のクラッチの係合状態を切換えることによって高速な変速制御を実現している。
【0003】
何れの自動変速機においても運転者の操作を含む車両状態によっては、変速指令に応じた変速制御を実行している間に、さらなる変速指令が送出されることがある。そうすると、自動変速機は、一旦先出の変速指令に応じた変速段にシフトしてから、後出の変速指令に応じた変速段にシフトする変速制御を行う。このように、変速指令が送出されるタイミングによっては、自動変速機が変速指令に対して変速制御を即時に実行開始できないビジーシフトが発生することがある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−332840号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ビジーシフトが発生すると、後出の変速指令による要求変速段へのシフトが完了するまでに要する時間が長くなり、運転者の加速要求などに即時に対応できないおそれがある。また、ビジーシフトにより短期間に複数回の変速を行うことになると、クラッチ機構やシフト機構の負荷増大が懸念される。
【0006】
本発明は、上記課題を鑑みてなされたものであり、ビジーシフトの発生を抑制するとともに、変速回数を低減しクラッチ機構やシフト機構の負荷を低減することが可能な自動変速機を提供することを目的とする。
【課題を解決するための手段】
【0007】
上述した課題を解決するために、請求項1に係る発明によると、ケースに回転可能に支持された入力軸と、原動機の回転駆動力を前記入力軸に伝達するクラッチ機構と、前記入力軸に伝達された回転駆動力を変速する複数の変速段を選択的に成立させるシフト機構と、前記シフト機構を動作させるとともに、変速指令が送出されると前記クラッチ機構の係合状態を切り換えて前記変速指令に応じた変速制御を実行する変速制御装置と、を備え、前記変速制御装置は、前記変速指令が送出された際に、当該変速指令に応じた前記変速制御に要するシフト時間と現在から次回の変速指令が送出されるまでの次指令時間とを算出し、前記シフト時間が前記次指令時間よりも長い場合には待機時間だけ前記変速制御の実行を待機する。
【0008】
請求項2に係る発明によると、請求項1において、前記変速制御装置は、前記変速指令の送出時における車両速度およびアクセル開度の変化速度に基づいて前記次指令時間を算出する。
【0009】
請求項3に係る発明によると、請求項1または2において、前記変速制御装置は、前記待機時間を前記次指令時間以上に且つ前記シフト時間以下に設定する。
【0010】
請求項4に係る発明によると、請求項1〜3の何れか一項において、前記変速制御装置は、前記変速指令が送出された際に、前記シフト時間が前記次指令時間よりも長く、且つ前記変速指令の送出時におけるアクセル開度が予め設定された閾値より小さい場合には前記変速制御の実行を待機させる。
【発明の効果】
【0011】
請求項1に係る発明によると、変速制御装置は、変速指令が送出された際に、算出したシフト時間および次指令時間を比較してシフト時間が長い場合には待機時間だけ変速制御の実行を待機する。このシフト時間は、現在の変速段から要求変速段にシフトする変速制御に要する時間であって、現在変速段やシフト機構などの状態によって算出することができる。ここで、自動変速機において、送出される変速指令は、例えば、車両速度とアクセル開度の関係を表した複数段の変速線を有するマップデータに基づいて決定される。そして、車両状態によっては、変速指令による要求変速段に変速している間に、上記のマップデータに基づいて、さらに変速指令が送出されてビジーシフトとなることがある。
【0012】
そこで、本発明では、次指令時間よりもシフト時間の方が長い場合に、即ちビジーシフトの発生が想定される場合に、待機時間だけ変速制御の実行を待機する構成としている。これにより、想定した通りに待機時間の間に変速指令が送出されると、変速制御装置は、新たに送出された変速指令に応じた変速制御の実行を即時に開始することができる。そして、複数回に亘って送出された変速指令に対して1回の変速制御で最終的な要求変速段へシフトすることができる。よって、ビジーシフトの発生を抑制することができるとともに、変速回数を低減しクラッチ機構やシフト機構の負荷を低減することが可能となる。
【0013】
請求項2に係る発明によると、変速制御装置は、変速指令の送出時における車両速度およびアクセル開度の変化速度に基づいて次指令時間を算出する。次回の変速指令は、車両状態とマップデータに基づいて送出されるタイミングが変動することから、特に車両速度およびアクセル開度の変化速度から送出される時刻を推定することができる。これにより、現在から次回の変速指令が送出されるまでの次指令時間を高精度に算出することができる。よって、変速制御装置は、変速制御の実行を待機する待機制御の要否をより確実に判定することができる。
【0014】
請求項3に係る発明によると、変速制御装置は、待機時間を次指令時間以上に且つシフト時間以下に設定する。これにより、変速制御の実行を待機する待機時間を好適に設定することができる。ここで、仮に待機時間だけ変速制御の実行を待機している間に車両状態が変化し、さらなる変速指令が待機時間内に送出されないことも想定される。このような場合においても、待機時間を好適に設定することにより、現在送出されている変速指令による変速制御に速やかに移行することができる。従って、待機時間の待機による時間的損失を低減できる。
【0015】
請求項4に係る発明によると、変速制御装置は、シフト時間が次指令時間よりも長いことに加えて、変速指令の送出時におけるアクセル開度が予め設定されている閾値より小さいことを条件として変速制御の実行を待機させる待機制御を実行する構成としている。変速制御装置による待機制御は、次回の変速指令が待機時間内に送出されることを想定して実行される。そして、次回の変速指令は、マップデータに基づいて車両状態に対応して送出されるが、特にアクセルが踏み増しされている状態ではアクセル開度が上昇し短時間のうちに送出されやすい。一方で、アクセル開度が所定以上であると、運転者の加速要求に応えるために変速を行わずに現在の変速段でエンジン回転数を上昇させるように制御することが多く、さらにアクセルの踏み増しが期待できないので次回の変速指令が送出されにくい。そこで、上記のような構成とすることで、待機制御の要否をより確実に判定することができる。
【図面の簡単な説明】
【0016】
【図1】実施形態における変速機1の全体構造を示すスケルトン図である。
【図2】変速機1の変速マップデータを示した図である。
【図3】ダウン変速制御における変速指令と変速状態を示すタイムチャートである。
【図4】待機制御を含むダウン変速制御を示すフローチャートである。
【発明を実施するための形態】
【0017】
以下、本発明の自動変速機を具体化した実施形態について図面を参照して説明する。
【0018】
<実施形態>
(変速機1の構成)
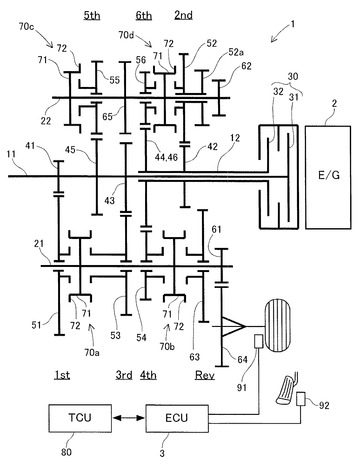
本実施形態における変速機1の構成について、図1を参照して説明する。変速機1は、車両に搭載されるデュアルクラッチ式の自動変速機である。変速機1は、図示しないケースに回転可能に支持された回転軸である第一入力軸11、第二入力軸12、第一副軸21、第二副軸22と、エンジン2の回転駆動力を回転軸に伝達するデュアルクラッチ30と、回転軸に回転可能に支持され前進または後進の変速段を構成する複数の変速ギヤ41〜46,51〜56,61〜64と、奇数変速段を選択的に成立させる第一シフト機構70a,70cと、偶数変速段を選択的に成立させる第二シフト機構70b,70dと、変速制御装置80と、各種センサ91,92を備える。上記のケースは、複数の軸受けにより各軸を支承するとともに、上記の複数のギヤおよび第一、第二シフト機構70a〜70dに含まれる摺動部に供給する潤滑油を収容している。
【0019】
エンジン2は、車両の駆動源として搭載された原動機である。また、エンジン2は、ECU(Engine Control Unit)3により作動を制御される。ECU3は、後述する変速制御装置80からの各種情報、および各種センサ91,92から車両情報を取得している。そして、ECU3は、これらの車両情報に基づいて、スロットル開度や燃料噴射量を調整し、エンジン2の回転数を制御している。車速センサ91は、駆動輪の回転数と駆動輪の外径から車両の速度を検知している。アクセル開度センサ92は、運転者のアクセル操作などに応じてエンジン2の出力を調整するアクセル開度を検出するセンサである。
【0020】
第一入力軸11は、中空軸状に形成され、軸受によりケースに対して回転可能に支承されている回転軸である。また、第一入力軸11の外周面には、軸受けを支持する部位と複数の外歯スプラインが形成されている。そして、第一入力軸11には、一速駆動ギヤ41および大径の五速駆動ギヤ45が直接形成されている。また、第一入力軸11の外周面に外歯スプラインが形成され、この外歯スプラインに三速駆動ギヤ43がスプライン嵌合により圧入されている。また、第一入力軸11は、デュアルクラッチ30の第一クラッチ31に連結される連結軸部が形成されている。このように、第一入力軸11には、複数の奇数変速段を構成する各駆動ギヤ41,43,45が固定して設けられている。
【0021】
第二入力軸12は、中空軸状に形成され、第一入力軸11の一部の外周に複数の軸受を介して回転可能に支承され、且つ、軸受によりケースのクラッチハウジングに対して回転可能に支承されている回転軸である。この第二入力軸12は、第一入力軸11に対して同心に相対回転可能に配置されている。また、第二入力軸12の外周面には、第一入力軸11と同様に、軸受けを支持する部位と複数の外歯歯車が形成されている。第二入力軸12には、二速駆動ギヤ42および大径の四速駆動ギヤ44(六速駆動ギヤ46)が形成されている。四速駆動ギヤ44は、四速従動ギヤ54および六速従動ギヤ56と噛合し、第4速段および第6速段の変速段を構成する駆動側のギヤとして共通化されたギヤである。また、第二入力軸12は、デュアルクラッチ30の第二クラッチ32に連結される連結軸部が形成されている。このように、第二入力軸12には、複数の偶数変速段を構成する各駆動ギヤ42,44,46が固定して設けられている。
【0022】
第一副軸21は、ケースの内部において第一入力軸11に平行に配置され、軸受によりケースに対して回転可能に支承されている回転軸である。また、第一副軸21の外周面には、最終減速ギヤ61と複数の外歯スプラインが形成されている。第一副軸21の外歯スプラインには、後述する第一シフト機構70aおよび第二シフト機構70bの各ハブ71がスプライン嵌合により圧入されている。最終減速ギヤ61は、ディファレンシャル(差動機構)のリングギヤ64に噛合している。さらに、第一副軸21は、一速従動ギヤ51、三速従動ギヤ53、四速従動ギヤ54、および後進ギヤ63を遊転可能に支持する支持部が形成されている。
【0023】
第二副軸22は、ケースの内部において第一入力軸11に平行に配置され、軸受によりケースに対して回転可能に支承されている回転軸である。また、第二副軸22の外周面には、第一副軸21と同様に、最終減速ギヤ62と複数の外歯スプラインが形成されている。第二副軸22の外歯スプラインには、後述する第一シフト機構70cおよび第二シフト機構70dの各ハブ71およびパーキング機構(図示しない)のパーキングギヤ65がスプライン嵌合により圧入されている。パーキング機構は、車両が停車状態となった場合に、パーキングギヤ65の回転を規制することにより、駆動輪に連結される軸の回転を防止することで、車両の停車状態を保持する機構である。また、最終減速ギヤ62は、ディファレンシャルのリングギヤ64に噛合している。さらに、第二副軸22は、二速従動ギヤ52、五速従動ギヤ55、および六速従動ギヤ56を遊転可能に支持する支持部が形成されている。
【0024】
デュアルクラッチ30は、エンジン2の回転駆動力を第一入力軸11に伝達する第一クラッチ31と、エンジン2の回転駆動力を第二入力軸12に伝達する第二クラッチ32を有するクラッチ機構である。このデュアルクラッチ30は、ケースのクラッチハウジングに収容され、第一入力軸11および第二入力軸12に対して同心に設けられている。第一クラッチ31は第一入力軸11の連結軸部に連結され、第二クラッチ32は第二入力軸12の連結軸部に連結されている。そして、デュアルクラッチ30は、変速制御装置80から入力される制御指令に基づいて、図示しないアクチュエータを動作させる。アクチュエータは、その動作量に応じて第一クラッチ31および第二クラッチ32の係合力を調整可能となっている。このような構成からなるデュアルクラッチ30は、変速制御装置80の制御によって、第一クラッチ31および第二クラッチ32の係合状態を切り換える。
【0025】
後進ギヤ63は、第一副軸21に形成された後進ギヤの支持部に遊転可能に設けられている。また、本実施形態において、後進ギヤ63は、二速従動ギヤ52に一体的に形成された小径ギヤ52aに常に噛合し回転連結されている。リングギヤ64は、最終減速ギヤ61および最終減速ギヤ62に噛合することで、第一副軸21および第二副軸22に常時回転連結している。このリングギヤ64は、変速機1におけるファイナルギヤとして差動機構を構成し、ドライブシャフトを介して駆動輪に連結されている。
【0026】
第一、第二シフト機構70a〜70dは、変速制御装置80によって制御され、シフト操作に応じた変速段を成立させる機構である。本実施形態において、変速機1は、図1に示すように、4箇所に第一、第二シフト機構70a〜70dをそれぞれ配置している。第一、第二シフト機構70a〜70dは、変速ギヤのうち第一副軸21または第二副軸22に連結する変速ギヤの対象が異なる。第一シフト機構70aは、奇数変速段のうち第1速段を構成する一速従動ギヤ51および第3速段を構成する三速従動ギヤ53を連結の対象としている。第二シフト機構70bは、偶数変速段のうち第4速段を構成する四速従動ギヤ54と後進ギヤ63を連結の対象としている。第一シフト機構70cは、奇数変速段のうち第5速段を構成する五速従動ギヤ55のみを連結の対象としている。第二シフト機構70dは、偶数変速段のうち第2速段を構成する二速従動ギヤ52および第6速段を構成する六速従動ギヤ56を連結の対象としている。
【0027】
この第一、第二シフト機構70a〜70dは、ハブ71と、スリーブ72を備える。ハブ71は、内歯スプラインおよび外歯スプラインが形成された中空円盤状をなしている。ハブ71は、第一副軸21または第二副軸22の外歯スプラインにスプライン嵌合により圧入され、これにより圧入された副軸と一体的に回転する部材である。スリーブ72は、ハブ71に対して軸方向に移動可能となるようにハブ71の外歯スプラインに噛合している。このスリーブ72は、回転軸の軸方向にスライドして変速段の従動ギヤ51〜56または後進ギヤ63のピースギヤ部に噛合可能となっている。スリーブ72が各ギヤのピースギヤ部に噛合すると、各ギヤは支持されている副軸に相対回転不能に接続され、一体的に回転可能となる。また、スリーブ72は、軸方向にスライドした際に、図示しないシンクロリングを連結の対象とするギヤに付勢し、ギヤの回転数を副軸の回転数に同期させてから各ギヤと副軸を連結することを可能としている。
【0028】
このように、第一シフト機構70a,70cは、第一入力軸11に伝達された回転駆動力を変速して奇数変速段を成立させている。同様に、第二シフト機構70b、70dは、第二入力軸12に伝達された回転駆動力を変速して偶数変速段を成立させている。即ち、第一入力軸11、各駆動ギヤ41,43,45、各従動ギヤ51,53,55、および第一シフト機構70a,70cは、奇数変速段を成立させる系統の変速機構を構成している。また、第二入力軸12、各駆動ギヤ42,44,46、各従動ギヤ52,54,56、および第二シフト機構70b,70dは、偶数変速段を成立させる系統の変速機構を構成している。そして、デュアルクラッチ式の変速機1は、変速制御装置80によりデュアルクラッチ30を制御し、2系統に分かれた変速機構に回転駆動力を離脱係合している。
【0029】
変速制御装置80は、ECU3とCAN(Controller Area Network)通信によって相互に情報を交換し、ECU3からの変速指令や取得した車両情報などに基づいて変速機1の変速制御を行うTCU(Traction Control Unit)である。そのため、変速制御装置80は、第一シフト機構70a,70cおよび第二シフト機構70c,70dの動作機構に制御指令を出力して動作させ、所定の変速段を構成する従動ギヤと副軸の連結状態と連結解除状態を切換えている。さらに、変速制御装置80は、デュアルクラッチ30のアクチュエータに制御指令を出力し、第一クラッチ31および第二クラッチ32の切離状態と接続状態とを制御している。
【0030】
また、本実施形態の変速制御装置80は、変速指令に対して変速制御を即時に実行開始できないビジーシフトの発生を抑制することなどを目的として、待機時間だけ変速制御の実行を待機する待機制御を行う。そのため、変速制御装置80は、ECU3から変速指令が送出された際に、当該変速指令に応じた変速制御に要するシフト時間と、現在から次回の変速指令が送出されるまでの次指令時間とを算出する。そして、変速制御装置80は、シフト時間が次指令時間よりも長い場合には、待機時間だけ変速制御の実行を待機する待機制御を実行する。
【0031】
この待機時間は、本実施形態においては、以下のように設定される。変速制御装置80は、先ず、変速指令の送出時における車速およびアクセル開度の変化速度に基づいて、次指令時間を算出する。さらに、変速制御装置80は、現在送出されている変速指令に応じた変速制御に要するシフト時間を算出する。このシフト時間には、現在、変速制御中であれば、その変速制御が完了するまでの時間が含めてよい。そして、変速制御装置80は、待機時間を次指令時間以上に、且つシフト時間以下に設定する。
【0032】
また、次指令時間がシフト時間よりも長いものと算出された場合には、要求変速段への変速が完了した後に次回の変速指令が送出されるものと推定できる。そのため、変速制御装置80は、待機時間を0に設定、または待機制御を行うことなく要求変速段への変速制御を実行することになる。この待機制御の詳細については後述する。
【0033】
(変速制御装置80による変速制御)
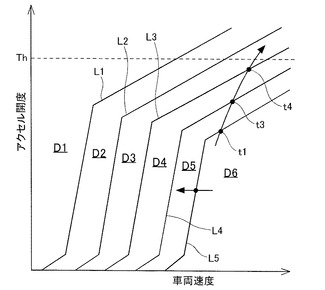
変速制御装置80による変速制御について図2を参照して説明する。上述したように、変速機1の変速制御装置80は、デュアルクラッチ30、第一シフト機構70a,70c、および第二シフト機構70b,70dを制御することにより、ECU3が変速マップデータに基づいて送出した変速指令に応じた変速制御を実行している。また、変速マップデータは、図2に示すように、アクセル開度と車速との関係を表した線である変速線L1〜L5を有している。変速マップデータとしては、アップシフト用のものとダウンシフト用のものがある。
【0034】
また、上述したような構成からなるデュアルクラッチ式の変速機1は、車両の走行中に回転駆動力が伝達されていない変速機構において変速予定の変速段を予め成立(プレシフト)させておき、変速指令が送出された場合に、各変速機構のクラッチの係合状態を切り換えることによって高速な変速制御を実現している。このようなプレシフトについても同様に、アッププレシフト用のものとダウンプレシフト用のものがある。ここでは、上記のダウンシフト用の変速線を有する変速マップデータを参照して、ダウンシフトの変速制御を実行する場合を例示して説明する。
【0035】
運転者の操作や走行状態を含む車両状態が、変速マップデータ上において変速線を跨ぐように遷移すると変速指令が送出される。例えば、アクセル開度を一定に維持し第6速段で走行中に、車両が坂路に差し掛かるなどして車速が低減した場合には、車両状態が変速線L5を跨いで領域D6から領域D5に遷移する。そうすると、ECU3から要求変速段を第5速段とする変速指令が送出される。このように、車両状態が遷移した先の領域D5〜D1によって、ECU3から送出される変速指令による要求変速段(第5速段〜第1速段)が異なる。
【0036】
また、変速機1は、ダウンプレシフト用のプレシフト線を有する変速マップデータに基づいて、車両の走行中に回転駆動力が伝達されていない変速機構において変速予定の変速段を予め成立させるプレシフトを行っている。つまり、上記の例では、第6速段を成立させている変速機構とは別系統の変速機構において、車両状態が領域D5に遷移する前に予め第5速段を成立させておく。そして、要求変速段を第5速段とする変速指令が送出された場合に、デュアルクラッチ30の係合状態を切り換えて要求変速段に変速している。このように、デュアルクラッチ30を有するデュアルクラッチ式の自動変速機は、プレシフトを利用することでシフト変更の高速化を図っている。
【0037】
ところで、デュアルクラッチ式を含む自動変速機において、運転者の操作を含む車両状態によっては変速指令に応じた変速制御を実行している間に、さらなる変速指令が送出されることがある。これは、短時間に車両状態が変速マップデータ上において複数の領域に亘って遷移したことによる。そうすると、変速指令が送出されるタイミングによっては、変速指令に対して変速制御を即時に実行開始できないビジーシフトの状態となる。このような場合に、自動変速機は、一旦先出の変速指令に応じた変速段にシフトしてから、後出の変速指令に応じた変速段にシフトする変速制御を行うことになる。
【0038】
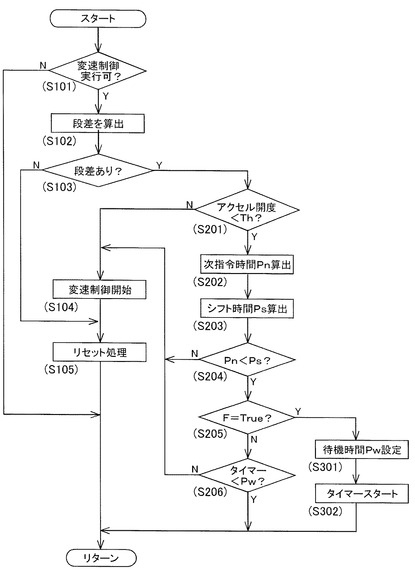
(変速制御装置80による待機制御)
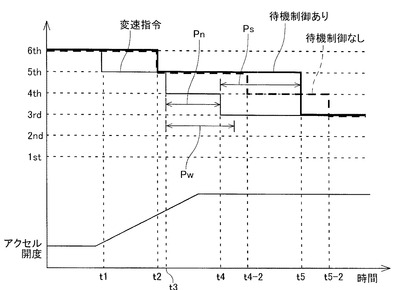
変速制御装置80による待機制御について、図2〜図4を参照して説明する。ここでは、図3に示すように、第6速段から第3速段にダウン変速する場合を例示する。また、変速制御装置80は、図4に示すような処理を実行する制御プログラムを、短期間(例えば、6[ms])毎に呼出すことにより、ダウン変速制御を行っている。先ず、第6速段で走行中に、運転者によりアクセルが踏み込まれるとアクセル開度が上昇し、図3に示すように、時刻t1において第5速段を要求する変速指令が送出される。
【0039】
そうすると、変速制御装置80は、現在のところ要求された変速段への変速制御が実行可能な状態であるかを判定する(S101)。これは、以前に送出された変速指令に基づく変速制御やプレシフト制御が実行中であると、即時に変速制御を実行できないので、S101において変速制御の実行可否を判定している。ここでは、変速機1は、第6速段で走行中に第5速段へのプレシフトが完了している状態(S101:Yes)とする。
【0040】
次に、変速制御装置80は、現在変速段(第6速段)と要求変速段(第5速段)の段差を算出する(S102)。ここでは、段差が1段として算出されているため、段差の有無の判定(S103)においては段差ありと判定される(S103:Yes)。これは、複数の変速指令が送出された場合に、車両状態によっては現在の変速段を要求する変速指令となることがあるため、S103において段差の有無を判定している。ここで、段差が0の場合には(S103:No)、待機制御に使用されるタイマーおよび待機制御フラグFをリセットする処理を行って(S105)、制御プログラムを終了する。
【0041】
続いて、変速制御装置80は、変速指令の送出時におけるアクセル開度および予め設定されている閾値Thを、ECU3から取得する。アクセル開度については、変速指令の送出時に検知されたものとし、変速制御装置80が指令信号を受けた時から現在までの期間に検知されたものであればよい。ここでは、アクセル開度が閾値Thを下回っているものとし(S201:Yes)、変速制御装置80は、次指令時間Pnの算出に移行する。
【0042】
上記の閾値Thは、待機制御の実行要否を判断するために、アクセル開度に対して設けられた基準値である。この閾値Thをアクセル開度が超えている場合には、さらなるアクセルの踏み増しが期待できないものと判断し、待機制御の実行を抑制している。つまり、アクセル開度が閾値Th以上となっている場合には(S201:No)、待機制御を開始せずに、または継続中であれば待機制御を終了し、変速制御装置80による変速制御が開始される(S104)。
【0043】
次に、変速制御装置80は、変速指令の送出時における車速およびアクセル開度の変化速度に基づいて、次回の変速指令が送出されるまでの次指令時間Pnを算出する(S202)。そのため、変速制御装置80は、先ず、変速マップデータ上における車両状態の遷移を勘案し、第4速段を要求する次回の変速指令が送出される時刻を推定する。そして、変速指令の送出時から当該時刻までの差分から次指令時間Pnを算出する。
【0044】
より具体的には、例えば、車速の変化速度およびアクセル開度の変化速度から求められる車両状態の変化特性を示す曲線と、変速線L4との交点を求める。そして、現在のアクセル開度から上記の変化速度でアクセル開度が上昇した場合に、変速線L4の交点におけるアクセル開度に達するまでに要する時間を次指令時間Pnとして算出する。また、次指令時間Pnの算出をより簡易にするために、車両状態の変化特性を直線で近似したり、車速を一定とみなしたりする構成としてもよい。
【0045】
さらに、変速制御装置80は、現在送出されている変速指令に応じた変速制御に要するシフト時間Psを算出する(S203)。つまり、変速制御装置80は、現在の第6速段から第5速段に変速制御する場合に、要する時間をシフト時間Psとして算出する。このシフト時間Psは、現在変速段と要求変速段、プレシフトの状態などに応じて変動し、これらの情報を勘案して算出することが可能である。ここでは、第5速段へのプレシフトが完了していることから比較的短いシフト時間として算出される。
【0046】
続いて、変速制御装置80は、算出した次指令時間Pnとシフト時間Psを比較する(S204)。ここで、次指令時間Pnよりもシフト時間Psの方が長い場合には、変速機1が次回の変速指令に対して変速制御を即時に実行開始できない状態(ビジーシフトの発生)となることが想定される。つまり、S204では、次指令時間Pnとシフト時間Psの比較により、次回の変速指令が送出された際にビジーシフトとなるか否かを判定しているとも言える。
【0047】
ここでは、変速機1がプレシフトを利用した高速のシフト変更が可能であり、次指令時間Pnがシフト時間Psよりも長いものとして(S204:No)、変速制御装置80による変速制御が開始される(S104)。その後に、変速制御を開始したために、上述したタイマーおよび待機制御フラグFのリセット処理を行って(S105)、制御プログラムを終了する。そして、時刻t2において最初に送出された第5速段への変速指令に基づく変速制御が終了する。
【0048】
このように、次指令時間Pnがシフト時間Psよりも長い場合には(S204:No)、要求変速段(第5速段)への変速が完了した後に次回の変速指令が送出されるものと推定できる。つまり、現在の要求変速段への変速制御を開始した場合に、次回の変速指令の送出よりも早く当該変速制御が完了することになるため、次回の変速指令が送出されてもビジーシフトが発生しないことになる。
【0049】
次に、運転者によるアクセルの踏み込みが継続している状態では、アクセル開度が時刻t1と同様の変化速度で上昇し、図3に示すように、時刻t3において第4速段を要求する変速指令が送出される。そうすると、変速制御装置80は、再び現在のところ要求された変速段(第4速段)への変速制御が実行可能な状態であるかを判定する(S101)。ここでは、第5速段への変速制御が終了しているため、次の変速制御を実行可能な状態(S101:Yes)にあるものとする。そうすると、変速制御装置80は、現在の変速段(第5速段)と要求変速段(第4速段)の段差を算出する(S102)。ここでは、同様に段差が1段として算出され、段差ありと判定される(S103:Yes)。
【0050】
続いて、変速制御装置80は、変速指令の送出時におけるアクセル開度と閾値Thを比較する(S201)。ここでは、アクセル開度が閾値Thを下回っているものとし(S201:Yes)、変速制御装置80は、次指令時間Pnの算出(S202)に移行する。変速制御装置80は、先程と同様に、変速マップデータ上における車両状態の遷移を勘案し、第3速段を要求する次回の変速指令が送出される時刻を推定する。そして、変速指令の送出時から当該時刻までの差分から次指令時間Pnを算出する。
【0051】
さらに、変速制御装置80は、現在送出されている変速指令に応じた変速制御に要するシフト時間Psを算出する(S203)。つまり、変速制御装置80は、現在の第5速段から第4速段に変速制御する場合に、要する時間をシフト時間Psとして算出する。ここでは、変速機1が第5速段への変速直後であることから、シフト時間Psは、最初に行った第6速段から第5速段へのプレシフトを利用した変速制御と比較して長くなる。
【0052】
そして、変速制御装置80は、再び、算出した次指令時間Pnとシフト時間Psを比較する(S204)。ここでは、先程よりもシフト時間Psが長くなったこともあり、次指令時間Pnがシフト時間Psよりも短いものとして(S204:Yes)、待機制御の実行に移行する。つまり、第4速段への変速制御を開始すると、第3速段を要求する変速指令が送出された時点でビジーシフトの発生が想定されるため、第4速段への変速制御の実行を待機させる。
【0053】
次に、待機制御フラグFに基づいて、現在のところ待機制御中であるかを判定する(S205)。ここでは、まだ待機制御が開始されていないので(S205:Yes)、待機時間Pwを設定する(S301)。変速制御装置80は、次指令時間Pnに所定の余裕時間を加算した時間を待機時間Pwとして設定する。この余裕時間は、算出された次指令時間Pnの誤差を許容するものであり、予め設定されている。また、待機時間Pwは、シフト時間Ps以下となるように設定される。
【0054】
そして、変速制御装置80は、タイマーをスタートさせるとともに待機制御フラグFを立てて(S304)、制御プログラムを終了する。このように、変速制御装置80は、本来であれば第5速段への変速制御が完了し既出の変速指令(第4速段)に基づく変速制御を開始するところ、各条件(S103,S201,S204において判定)を満たす場合に、変速制御の実行を待機する待機制御を行うものである。待機制御が開始され次回の変速指令が送出される前においては、(S101)〜(S103:Yes)、続いて(S201)〜(S204:Yes)と移行し、S205では待機制御中と判定される(S205:No)。
【0055】
そして、変速制御装置80は、タイマーと待機時間Pwを比較し(S206)、待機時間Pwよりも短い場合には(S206:Yes)、制御プログラムを終了し待機制御を継続させる。S206において、タイマーと待機時間Pwを比較するのは、待機制御を中断して既出の変速指令に基づく変速制御を開始するためである。つまり、待機時間Pwの間に次回の変速指令が送出されるものと推定されていたにも関わらず、車両状態の変化などにより次回の変速指令が送出されなかった場合などが想定される。
【0056】
その後に、運転者によるアクセルの踏み込みが継続されている状態では、アクセル開度が時刻t3と同様の変化速度で上昇し、図3に示すように、時刻t4において第3速段を要求する変速指令が送出される。そうすると、変速制御装置80は、再び現在のところ要求された変速段(第3速段)への変速制御が実行可能な状態であるか判定する(S101)。ここでは、上述したように、第5速段への変速制御が終了しているため、次の変速制御を実行可能な状態(S101:Yes)にある。そうすると、変速制御装置80は、現在の変速段(第5速段)と要求変速段(第3速段)の段差を算出する(S102)。ここでは、段差が2段として算出され、段差ありと判定される(S103:Yes)。
【0057】
これにより、変速制御装置80は、(S201)〜(S204)と移行する。ここで、運転者によるアクセルの踏み込みにより、アクセル開度が時刻t4において閾値Th以上となっている場合には(S201:No)、待機制御を終了し、変速制御装置80による変速制御が開始される(S104)。また、第2速段を要求する次回の変速指令が送出されるまでの次指令時間Pn、および現在の第5速段から第3速段に変速する場合に要するシフト時間Psが再び算出され(S202,S203)、両者を比較する(S204)。ここでは、第2速段を要求する次回の変速指令が送出されるまで、ある程度の期間があるものとする。そうすると、次指令時間Pnがシフト時間Psよりも短い(S204:No)ので、ビジーシフトが発生しないものと想定される状態となったものと判断し、変速制御装置80による変速制御が開始される(S104)。
【0058】
上述したように、時刻t4において変速指令が送出された時点で、現在の第5速段から第3速段への変速制御を開始することが妥当であると判断され、この変速制御を開始するものとした。一方で、車両状態によっては、さらに第2速段を要求する次回の変速指令が、新たに算出されたシフト時間Psよりも短い間に送出されることも想定される。そのような場合には、さらに待機時間Pwを再設定するなどして待機制御を継続し、第2速段への変速指令が素出された後に第5速段から第2速段への変速制御を実行するようにしてもよい。
【0059】
最後に、変速制御装置80は、変速指令による要求変速段(第3速段)への変速制御を開始(S104)する。そして、タイマーおよび待機制御フラグFをリセットする処理を行い(S105)、待機制御および制御プログラムを終了する。この第5速段から第3速段への変速制御は、時刻t4において送出された第3速段を要求する変速指令に応じて変速制御を即時に開始したシフトである。そして、変速制御装置80による第二シフト機構70dおよびデュアルクラッチ30の制御、および第二入力軸12の同期制御などを経て、時刻t5においてシフトが完了する。
【0060】
(実施形態の効果)
上述したデュアルクラッチ式の変速機1によると、シフト時間Psおよび次指令時間Pnを比較してシフト時間Psが長い、即ちビジーシフトの発生が想定される場合に、待機時間Pwだけ変速制御の実行を待機する待機制御を行うものとした。これにより、想定した通りに待機時間Pwの間に変速指令が送出されると、変速制御装置80は、新たに送出された変速指令に応じた変速制御の実行を即時に開始することができる。そして、複数回に亘って送出された変速指令に対して1回の変速制御で最終的な要求変速段へシフトすることができる。よって、ビジーシフトの発生を抑制することができるとともに、変速回数を低減しクラッチ機構やシフト機構の負荷を低減することが可能となる。
【0061】
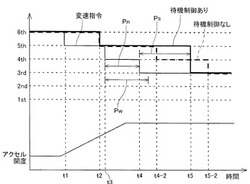
ここで、例示した車両状態において待機制御を行わなかった場合について説明する。変速制御装置は、図3の破線で示すように、時刻t2において、最初に送出された第5速段への変速指令に基づく変速制御を終了している。そのため、時刻t3において第4速段を要求する変速指令が送出されると、第5速段から第4速段への変速制御が開始される。その後に、時刻t4において第3速段を要求する変速指令が送出されるが、変速制御中であるため、この変速指令に対して即時に変速制御を実行できないビジーシフトが発生する。時刻t4−2において第4速段への変速制御が完了し、この時点から既出の変速指令による第3速段への変速制御が開始される。そして、待機制御を行わなかった場合には、時刻t5−2においてシフトが完了する。このように、待機制御を行った場合と行わなかった場合では、変速制御の回数を低減できる上に、最終的にシフトが完了する時間を短縮することができる。
【0062】
また、変速制御装置80は、変速指令の送出時における車両速度およびアクセル開度の変化速度に基づいて次指令時間Pnを算出するものとした。次回の変速指令は、車両状態とマップデータに基づいて送出されるタイミングが変動することから、特に車両速度およびアクセル開度の変化速度から送出される時刻を推定することができる。これにより、現在から次回の変速指令が送出されるまでの次指令時間Pnを高精度に算出することができる。よって、変速制御装置80は、変速制御の実行を待機する待機制御の要否をより確実に判定することができる。
【0063】
さらに、変速制御装置80は、待機時間Pwを次指令時間Pn以上に且つシフト時間Ps以下に設定するものとした。これにより、変速制御の実行を待機する待機時間Pwを好適に設定することができる。ここで、仮に待機時間Pwだけ変速制御の実行を待機している間に車両状態が変化し、さらなる変速指令が待機時間Pw内に送出されないことも想定される。このような場合においても、待機時間Pwを好適に設定することにより、現在送出されている変速指令による変速制御に速やかに移行することができる。従って、待機時間Pwの待機による時間的損失を低減できる。
【0064】
変速制御装置80は、シフト時間Psが次指令時間Pnよりも長いことに加えて、変速指令の送出時におけるアクセル開度が予め設定されている閾値より小さいことを条件として変速制御の実行を待機させる待機制御を実行する構成とした。変速制御装置80による待機制御は、次回の変速指令が待機時間Pw内に送出されることを想定して実行される。そして、次回の変速指令は、マップデータに基づいて車両状態に対応して送出されるが、特にアクセルが踏み増しされている状態ではアクセル開度が上昇し短時間のうちに送出されやすい。一方で、アクセル開度が所定以上であると、運転者の加速要求に応えるために変速を行わずに現在の変速段でエンジン回転数を上昇させるように制御することが多く、さらにアクセルの踏み増しが期待できないので次回の変速指令が送出されにくい。そこで、上記のような構成とすることで、待機制御の要否をより確実に判定することができる。
【0065】
<実施形態の変形態様>
本実施形態において、変速機1がデュアルクラッチ式自動変速機であるものとして説明した。これに対して、デュアルクラッチ式でなくても3段以上の変速段を有する自動変速機であれば、本発明を適用することができる。その場合においても、適用する自動変速機における次指令時間Pnおよびシフト時間Psを算出することで待機時間Pwを設定し、ビジーシフトの発生を抑制するとともに変速回数の低減を図ることができる。
【0066】
また、本実施形態において、変速制御装置80による待機制御として、第5速段から第3速段にダウン変速する場合を例示した。これに対して、何れの変速段における変速制御であっても、同様の待機制御を実行することが可能である。さらには、段差が1段または複数段の変速制御であっても、同様に待機制御を実行することが可能である。但し、変速機1の構成や仕様などを勘案し、段差が2段以上となった時点で待機制御を行わないように、待機制御の要否を判定するようにしてもよい。より具体的には、例えば、S103において、本実施形態では段差の有無を判定するようにしたが、ここで段差が1段である場合にのみS201に移行するように判定してもよい。これにより、既出の要求変速段への変速制御を実行することで運転者の加速指向に応えることができる。但し、ビジーシフトの発生を抑制し、変速回数を低減することを目的とする場合には、本実施形態で例示したような態様が好適である。
【0067】
さらに、本実施形態において、待機時間Pwについては、次指令時間Pnに余裕時間を加算して設定した。これに対して、予め設定された一定時間に設定したり、或いはアクセル開度またはその変化速度から算出したりする構成としてもよい。また、次指令時間Pnについても同様に、アクセル開度またはその変化速度に基づいてマップから簡易的に取得する構成としてもよい。
【符号の説明】
【0068】
1:変速機、 2:エンジン(原動機)、 3:ECU
11:第一入力軸、 12:第二入力軸
21:第一副軸、 22:第二副軸
30:デュアルクラッチ(クラッチ機構)
31:第一クラッチ、 32:第二クラッチ
41〜46:変速段の駆動ギヤ
51〜56:変速段の従動ギヤ、 52a:小径ギヤ
61,62:最終減速ギヤ、 63:後進ギヤ、 64:リングギヤ
65:パーキングギヤ
70a,70c:第一シフト機構、 70b、70d:第二シフト機構
71:ハブ、 72:スリーブ
80:変速制御装置
【技術分野】
【0001】
本発明は、車両状態に応じて自動変速を行う自動変速機に関するものである。
【背景技術】
【0002】
自動変速機は、車両に搭載されたエンジンなどの原動機が出力する回転駆動力を自動で変速する装置として用いられている。そして、自動変速機は、変速指令が送出されると、シフト機構およびクラッチ機構を動作させて変速指令に応じた変速制御を行う。また、自動変速機として、例えば、特許文献1には、複数のクラッチを備えるデュアルクラッチ式自動変速機が開示されている。このデュアルクラッチ式自動変速機は、変速予定の変速段を予め成立させておき、変速指令が送出された場合に、複数のクラッチの係合状態を切換えることによって高速な変速制御を実現している。
【0003】
何れの自動変速機においても運転者の操作を含む車両状態によっては、変速指令に応じた変速制御を実行している間に、さらなる変速指令が送出されることがある。そうすると、自動変速機は、一旦先出の変速指令に応じた変速段にシフトしてから、後出の変速指令に応じた変速段にシフトする変速制御を行う。このように、変速指令が送出されるタイミングによっては、自動変速機が変速指令に対して変速制御を即時に実行開始できないビジーシフトが発生することがある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−332840号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ビジーシフトが発生すると、後出の変速指令による要求変速段へのシフトが完了するまでに要する時間が長くなり、運転者の加速要求などに即時に対応できないおそれがある。また、ビジーシフトにより短期間に複数回の変速を行うことになると、クラッチ機構やシフト機構の負荷増大が懸念される。
【0006】
本発明は、上記課題を鑑みてなされたものであり、ビジーシフトの発生を抑制するとともに、変速回数を低減しクラッチ機構やシフト機構の負荷を低減することが可能な自動変速機を提供することを目的とする。
【課題を解決するための手段】
【0007】
上述した課題を解決するために、請求項1に係る発明によると、ケースに回転可能に支持された入力軸と、原動機の回転駆動力を前記入力軸に伝達するクラッチ機構と、前記入力軸に伝達された回転駆動力を変速する複数の変速段を選択的に成立させるシフト機構と、前記シフト機構を動作させるとともに、変速指令が送出されると前記クラッチ機構の係合状態を切り換えて前記変速指令に応じた変速制御を実行する変速制御装置と、を備え、前記変速制御装置は、前記変速指令が送出された際に、当該変速指令に応じた前記変速制御に要するシフト時間と現在から次回の変速指令が送出されるまでの次指令時間とを算出し、前記シフト時間が前記次指令時間よりも長い場合には待機時間だけ前記変速制御の実行を待機する。
【0008】
請求項2に係る発明によると、請求項1において、前記変速制御装置は、前記変速指令の送出時における車両速度およびアクセル開度の変化速度に基づいて前記次指令時間を算出する。
【0009】
請求項3に係る発明によると、請求項1または2において、前記変速制御装置は、前記待機時間を前記次指令時間以上に且つ前記シフト時間以下に設定する。
【0010】
請求項4に係る発明によると、請求項1〜3の何れか一項において、前記変速制御装置は、前記変速指令が送出された際に、前記シフト時間が前記次指令時間よりも長く、且つ前記変速指令の送出時におけるアクセル開度が予め設定された閾値より小さい場合には前記変速制御の実行を待機させる。
【発明の効果】
【0011】
請求項1に係る発明によると、変速制御装置は、変速指令が送出された際に、算出したシフト時間および次指令時間を比較してシフト時間が長い場合には待機時間だけ変速制御の実行を待機する。このシフト時間は、現在の変速段から要求変速段にシフトする変速制御に要する時間であって、現在変速段やシフト機構などの状態によって算出することができる。ここで、自動変速機において、送出される変速指令は、例えば、車両速度とアクセル開度の関係を表した複数段の変速線を有するマップデータに基づいて決定される。そして、車両状態によっては、変速指令による要求変速段に変速している間に、上記のマップデータに基づいて、さらに変速指令が送出されてビジーシフトとなることがある。
【0012】
そこで、本発明では、次指令時間よりもシフト時間の方が長い場合に、即ちビジーシフトの発生が想定される場合に、待機時間だけ変速制御の実行を待機する構成としている。これにより、想定した通りに待機時間の間に変速指令が送出されると、変速制御装置は、新たに送出された変速指令に応じた変速制御の実行を即時に開始することができる。そして、複数回に亘って送出された変速指令に対して1回の変速制御で最終的な要求変速段へシフトすることができる。よって、ビジーシフトの発生を抑制することができるとともに、変速回数を低減しクラッチ機構やシフト機構の負荷を低減することが可能となる。
【0013】
請求項2に係る発明によると、変速制御装置は、変速指令の送出時における車両速度およびアクセル開度の変化速度に基づいて次指令時間を算出する。次回の変速指令は、車両状態とマップデータに基づいて送出されるタイミングが変動することから、特に車両速度およびアクセル開度の変化速度から送出される時刻を推定することができる。これにより、現在から次回の変速指令が送出されるまでの次指令時間を高精度に算出することができる。よって、変速制御装置は、変速制御の実行を待機する待機制御の要否をより確実に判定することができる。
【0014】
請求項3に係る発明によると、変速制御装置は、待機時間を次指令時間以上に且つシフト時間以下に設定する。これにより、変速制御の実行を待機する待機時間を好適に設定することができる。ここで、仮に待機時間だけ変速制御の実行を待機している間に車両状態が変化し、さらなる変速指令が待機時間内に送出されないことも想定される。このような場合においても、待機時間を好適に設定することにより、現在送出されている変速指令による変速制御に速やかに移行することができる。従って、待機時間の待機による時間的損失を低減できる。
【0015】
請求項4に係る発明によると、変速制御装置は、シフト時間が次指令時間よりも長いことに加えて、変速指令の送出時におけるアクセル開度が予め設定されている閾値より小さいことを条件として変速制御の実行を待機させる待機制御を実行する構成としている。変速制御装置による待機制御は、次回の変速指令が待機時間内に送出されることを想定して実行される。そして、次回の変速指令は、マップデータに基づいて車両状態に対応して送出されるが、特にアクセルが踏み増しされている状態ではアクセル開度が上昇し短時間のうちに送出されやすい。一方で、アクセル開度が所定以上であると、運転者の加速要求に応えるために変速を行わずに現在の変速段でエンジン回転数を上昇させるように制御することが多く、さらにアクセルの踏み増しが期待できないので次回の変速指令が送出されにくい。そこで、上記のような構成とすることで、待機制御の要否をより確実に判定することができる。
【図面の簡単な説明】
【0016】
【図1】実施形態における変速機1の全体構造を示すスケルトン図である。
【図2】変速機1の変速マップデータを示した図である。
【図3】ダウン変速制御における変速指令と変速状態を示すタイムチャートである。
【図4】待機制御を含むダウン変速制御を示すフローチャートである。
【発明を実施するための形態】
【0017】
以下、本発明の自動変速機を具体化した実施形態について図面を参照して説明する。
【0018】
<実施形態>
(変速機1の構成)
本実施形態における変速機1の構成について、図1を参照して説明する。変速機1は、車両に搭載されるデュアルクラッチ式の自動変速機である。変速機1は、図示しないケースに回転可能に支持された回転軸である第一入力軸11、第二入力軸12、第一副軸21、第二副軸22と、エンジン2の回転駆動力を回転軸に伝達するデュアルクラッチ30と、回転軸に回転可能に支持され前進または後進の変速段を構成する複数の変速ギヤ41〜46,51〜56,61〜64と、奇数変速段を選択的に成立させる第一シフト機構70a,70cと、偶数変速段を選択的に成立させる第二シフト機構70b,70dと、変速制御装置80と、各種センサ91,92を備える。上記のケースは、複数の軸受けにより各軸を支承するとともに、上記の複数のギヤおよび第一、第二シフト機構70a〜70dに含まれる摺動部に供給する潤滑油を収容している。
【0019】
エンジン2は、車両の駆動源として搭載された原動機である。また、エンジン2は、ECU(Engine Control Unit)3により作動を制御される。ECU3は、後述する変速制御装置80からの各種情報、および各種センサ91,92から車両情報を取得している。そして、ECU3は、これらの車両情報に基づいて、スロットル開度や燃料噴射量を調整し、エンジン2の回転数を制御している。車速センサ91は、駆動輪の回転数と駆動輪の外径から車両の速度を検知している。アクセル開度センサ92は、運転者のアクセル操作などに応じてエンジン2の出力を調整するアクセル開度を検出するセンサである。
【0020】
第一入力軸11は、中空軸状に形成され、軸受によりケースに対して回転可能に支承されている回転軸である。また、第一入力軸11の外周面には、軸受けを支持する部位と複数の外歯スプラインが形成されている。そして、第一入力軸11には、一速駆動ギヤ41および大径の五速駆動ギヤ45が直接形成されている。また、第一入力軸11の外周面に外歯スプラインが形成され、この外歯スプラインに三速駆動ギヤ43がスプライン嵌合により圧入されている。また、第一入力軸11は、デュアルクラッチ30の第一クラッチ31に連結される連結軸部が形成されている。このように、第一入力軸11には、複数の奇数変速段を構成する各駆動ギヤ41,43,45が固定して設けられている。
【0021】
第二入力軸12は、中空軸状に形成され、第一入力軸11の一部の外周に複数の軸受を介して回転可能に支承され、且つ、軸受によりケースのクラッチハウジングに対して回転可能に支承されている回転軸である。この第二入力軸12は、第一入力軸11に対して同心に相対回転可能に配置されている。また、第二入力軸12の外周面には、第一入力軸11と同様に、軸受けを支持する部位と複数の外歯歯車が形成されている。第二入力軸12には、二速駆動ギヤ42および大径の四速駆動ギヤ44(六速駆動ギヤ46)が形成されている。四速駆動ギヤ44は、四速従動ギヤ54および六速従動ギヤ56と噛合し、第4速段および第6速段の変速段を構成する駆動側のギヤとして共通化されたギヤである。また、第二入力軸12は、デュアルクラッチ30の第二クラッチ32に連結される連結軸部が形成されている。このように、第二入力軸12には、複数の偶数変速段を構成する各駆動ギヤ42,44,46が固定して設けられている。
【0022】
第一副軸21は、ケースの内部において第一入力軸11に平行に配置され、軸受によりケースに対して回転可能に支承されている回転軸である。また、第一副軸21の外周面には、最終減速ギヤ61と複数の外歯スプラインが形成されている。第一副軸21の外歯スプラインには、後述する第一シフト機構70aおよび第二シフト機構70bの各ハブ71がスプライン嵌合により圧入されている。最終減速ギヤ61は、ディファレンシャル(差動機構)のリングギヤ64に噛合している。さらに、第一副軸21は、一速従動ギヤ51、三速従動ギヤ53、四速従動ギヤ54、および後進ギヤ63を遊転可能に支持する支持部が形成されている。
【0023】
第二副軸22は、ケースの内部において第一入力軸11に平行に配置され、軸受によりケースに対して回転可能に支承されている回転軸である。また、第二副軸22の外周面には、第一副軸21と同様に、最終減速ギヤ62と複数の外歯スプラインが形成されている。第二副軸22の外歯スプラインには、後述する第一シフト機構70cおよび第二シフト機構70dの各ハブ71およびパーキング機構(図示しない)のパーキングギヤ65がスプライン嵌合により圧入されている。パーキング機構は、車両が停車状態となった場合に、パーキングギヤ65の回転を規制することにより、駆動輪に連結される軸の回転を防止することで、車両の停車状態を保持する機構である。また、最終減速ギヤ62は、ディファレンシャルのリングギヤ64に噛合している。さらに、第二副軸22は、二速従動ギヤ52、五速従動ギヤ55、および六速従動ギヤ56を遊転可能に支持する支持部が形成されている。
【0024】
デュアルクラッチ30は、エンジン2の回転駆動力を第一入力軸11に伝達する第一クラッチ31と、エンジン2の回転駆動力を第二入力軸12に伝達する第二クラッチ32を有するクラッチ機構である。このデュアルクラッチ30は、ケースのクラッチハウジングに収容され、第一入力軸11および第二入力軸12に対して同心に設けられている。第一クラッチ31は第一入力軸11の連結軸部に連結され、第二クラッチ32は第二入力軸12の連結軸部に連結されている。そして、デュアルクラッチ30は、変速制御装置80から入力される制御指令に基づいて、図示しないアクチュエータを動作させる。アクチュエータは、その動作量に応じて第一クラッチ31および第二クラッチ32の係合力を調整可能となっている。このような構成からなるデュアルクラッチ30は、変速制御装置80の制御によって、第一クラッチ31および第二クラッチ32の係合状態を切り換える。
【0025】
後進ギヤ63は、第一副軸21に形成された後進ギヤの支持部に遊転可能に設けられている。また、本実施形態において、後進ギヤ63は、二速従動ギヤ52に一体的に形成された小径ギヤ52aに常に噛合し回転連結されている。リングギヤ64は、最終減速ギヤ61および最終減速ギヤ62に噛合することで、第一副軸21および第二副軸22に常時回転連結している。このリングギヤ64は、変速機1におけるファイナルギヤとして差動機構を構成し、ドライブシャフトを介して駆動輪に連結されている。
【0026】
第一、第二シフト機構70a〜70dは、変速制御装置80によって制御され、シフト操作に応じた変速段を成立させる機構である。本実施形態において、変速機1は、図1に示すように、4箇所に第一、第二シフト機構70a〜70dをそれぞれ配置している。第一、第二シフト機構70a〜70dは、変速ギヤのうち第一副軸21または第二副軸22に連結する変速ギヤの対象が異なる。第一シフト機構70aは、奇数変速段のうち第1速段を構成する一速従動ギヤ51および第3速段を構成する三速従動ギヤ53を連結の対象としている。第二シフト機構70bは、偶数変速段のうち第4速段を構成する四速従動ギヤ54と後進ギヤ63を連結の対象としている。第一シフト機構70cは、奇数変速段のうち第5速段を構成する五速従動ギヤ55のみを連結の対象としている。第二シフト機構70dは、偶数変速段のうち第2速段を構成する二速従動ギヤ52および第6速段を構成する六速従動ギヤ56を連結の対象としている。
【0027】
この第一、第二シフト機構70a〜70dは、ハブ71と、スリーブ72を備える。ハブ71は、内歯スプラインおよび外歯スプラインが形成された中空円盤状をなしている。ハブ71は、第一副軸21または第二副軸22の外歯スプラインにスプライン嵌合により圧入され、これにより圧入された副軸と一体的に回転する部材である。スリーブ72は、ハブ71に対して軸方向に移動可能となるようにハブ71の外歯スプラインに噛合している。このスリーブ72は、回転軸の軸方向にスライドして変速段の従動ギヤ51〜56または後進ギヤ63のピースギヤ部に噛合可能となっている。スリーブ72が各ギヤのピースギヤ部に噛合すると、各ギヤは支持されている副軸に相対回転不能に接続され、一体的に回転可能となる。また、スリーブ72は、軸方向にスライドした際に、図示しないシンクロリングを連結の対象とするギヤに付勢し、ギヤの回転数を副軸の回転数に同期させてから各ギヤと副軸を連結することを可能としている。
【0028】
このように、第一シフト機構70a,70cは、第一入力軸11に伝達された回転駆動力を変速して奇数変速段を成立させている。同様に、第二シフト機構70b、70dは、第二入力軸12に伝達された回転駆動力を変速して偶数変速段を成立させている。即ち、第一入力軸11、各駆動ギヤ41,43,45、各従動ギヤ51,53,55、および第一シフト機構70a,70cは、奇数変速段を成立させる系統の変速機構を構成している。また、第二入力軸12、各駆動ギヤ42,44,46、各従動ギヤ52,54,56、および第二シフト機構70b,70dは、偶数変速段を成立させる系統の変速機構を構成している。そして、デュアルクラッチ式の変速機1は、変速制御装置80によりデュアルクラッチ30を制御し、2系統に分かれた変速機構に回転駆動力を離脱係合している。
【0029】
変速制御装置80は、ECU3とCAN(Controller Area Network)通信によって相互に情報を交換し、ECU3からの変速指令や取得した車両情報などに基づいて変速機1の変速制御を行うTCU(Traction Control Unit)である。そのため、変速制御装置80は、第一シフト機構70a,70cおよび第二シフト機構70c,70dの動作機構に制御指令を出力して動作させ、所定の変速段を構成する従動ギヤと副軸の連結状態と連結解除状態を切換えている。さらに、変速制御装置80は、デュアルクラッチ30のアクチュエータに制御指令を出力し、第一クラッチ31および第二クラッチ32の切離状態と接続状態とを制御している。
【0030】
また、本実施形態の変速制御装置80は、変速指令に対して変速制御を即時に実行開始できないビジーシフトの発生を抑制することなどを目的として、待機時間だけ変速制御の実行を待機する待機制御を行う。そのため、変速制御装置80は、ECU3から変速指令が送出された際に、当該変速指令に応じた変速制御に要するシフト時間と、現在から次回の変速指令が送出されるまでの次指令時間とを算出する。そして、変速制御装置80は、シフト時間が次指令時間よりも長い場合には、待機時間だけ変速制御の実行を待機する待機制御を実行する。
【0031】
この待機時間は、本実施形態においては、以下のように設定される。変速制御装置80は、先ず、変速指令の送出時における車速およびアクセル開度の変化速度に基づいて、次指令時間を算出する。さらに、変速制御装置80は、現在送出されている変速指令に応じた変速制御に要するシフト時間を算出する。このシフト時間には、現在、変速制御中であれば、その変速制御が完了するまでの時間が含めてよい。そして、変速制御装置80は、待機時間を次指令時間以上に、且つシフト時間以下に設定する。
【0032】
また、次指令時間がシフト時間よりも長いものと算出された場合には、要求変速段への変速が完了した後に次回の変速指令が送出されるものと推定できる。そのため、変速制御装置80は、待機時間を0に設定、または待機制御を行うことなく要求変速段への変速制御を実行することになる。この待機制御の詳細については後述する。
【0033】
(変速制御装置80による変速制御)
変速制御装置80による変速制御について図2を参照して説明する。上述したように、変速機1の変速制御装置80は、デュアルクラッチ30、第一シフト機構70a,70c、および第二シフト機構70b,70dを制御することにより、ECU3が変速マップデータに基づいて送出した変速指令に応じた変速制御を実行している。また、変速マップデータは、図2に示すように、アクセル開度と車速との関係を表した線である変速線L1〜L5を有している。変速マップデータとしては、アップシフト用のものとダウンシフト用のものがある。
【0034】
また、上述したような構成からなるデュアルクラッチ式の変速機1は、車両の走行中に回転駆動力が伝達されていない変速機構において変速予定の変速段を予め成立(プレシフト)させておき、変速指令が送出された場合に、各変速機構のクラッチの係合状態を切り換えることによって高速な変速制御を実現している。このようなプレシフトについても同様に、アッププレシフト用のものとダウンプレシフト用のものがある。ここでは、上記のダウンシフト用の変速線を有する変速マップデータを参照して、ダウンシフトの変速制御を実行する場合を例示して説明する。
【0035】
運転者の操作や走行状態を含む車両状態が、変速マップデータ上において変速線を跨ぐように遷移すると変速指令が送出される。例えば、アクセル開度を一定に維持し第6速段で走行中に、車両が坂路に差し掛かるなどして車速が低減した場合には、車両状態が変速線L5を跨いで領域D6から領域D5に遷移する。そうすると、ECU3から要求変速段を第5速段とする変速指令が送出される。このように、車両状態が遷移した先の領域D5〜D1によって、ECU3から送出される変速指令による要求変速段(第5速段〜第1速段)が異なる。
【0036】
また、変速機1は、ダウンプレシフト用のプレシフト線を有する変速マップデータに基づいて、車両の走行中に回転駆動力が伝達されていない変速機構において変速予定の変速段を予め成立させるプレシフトを行っている。つまり、上記の例では、第6速段を成立させている変速機構とは別系統の変速機構において、車両状態が領域D5に遷移する前に予め第5速段を成立させておく。そして、要求変速段を第5速段とする変速指令が送出された場合に、デュアルクラッチ30の係合状態を切り換えて要求変速段に変速している。このように、デュアルクラッチ30を有するデュアルクラッチ式の自動変速機は、プレシフトを利用することでシフト変更の高速化を図っている。
【0037】
ところで、デュアルクラッチ式を含む自動変速機において、運転者の操作を含む車両状態によっては変速指令に応じた変速制御を実行している間に、さらなる変速指令が送出されることがある。これは、短時間に車両状態が変速マップデータ上において複数の領域に亘って遷移したことによる。そうすると、変速指令が送出されるタイミングによっては、変速指令に対して変速制御を即時に実行開始できないビジーシフトの状態となる。このような場合に、自動変速機は、一旦先出の変速指令に応じた変速段にシフトしてから、後出の変速指令に応じた変速段にシフトする変速制御を行うことになる。
【0038】
(変速制御装置80による待機制御)
変速制御装置80による待機制御について、図2〜図4を参照して説明する。ここでは、図3に示すように、第6速段から第3速段にダウン変速する場合を例示する。また、変速制御装置80は、図4に示すような処理を実行する制御プログラムを、短期間(例えば、6[ms])毎に呼出すことにより、ダウン変速制御を行っている。先ず、第6速段で走行中に、運転者によりアクセルが踏み込まれるとアクセル開度が上昇し、図3に示すように、時刻t1において第5速段を要求する変速指令が送出される。
【0039】
そうすると、変速制御装置80は、現在のところ要求された変速段への変速制御が実行可能な状態であるかを判定する(S101)。これは、以前に送出された変速指令に基づく変速制御やプレシフト制御が実行中であると、即時に変速制御を実行できないので、S101において変速制御の実行可否を判定している。ここでは、変速機1は、第6速段で走行中に第5速段へのプレシフトが完了している状態(S101:Yes)とする。
【0040】
次に、変速制御装置80は、現在変速段(第6速段)と要求変速段(第5速段)の段差を算出する(S102)。ここでは、段差が1段として算出されているため、段差の有無の判定(S103)においては段差ありと判定される(S103:Yes)。これは、複数の変速指令が送出された場合に、車両状態によっては現在の変速段を要求する変速指令となることがあるため、S103において段差の有無を判定している。ここで、段差が0の場合には(S103:No)、待機制御に使用されるタイマーおよび待機制御フラグFをリセットする処理を行って(S105)、制御プログラムを終了する。
【0041】
続いて、変速制御装置80は、変速指令の送出時におけるアクセル開度および予め設定されている閾値Thを、ECU3から取得する。アクセル開度については、変速指令の送出時に検知されたものとし、変速制御装置80が指令信号を受けた時から現在までの期間に検知されたものであればよい。ここでは、アクセル開度が閾値Thを下回っているものとし(S201:Yes)、変速制御装置80は、次指令時間Pnの算出に移行する。
【0042】
上記の閾値Thは、待機制御の実行要否を判断するために、アクセル開度に対して設けられた基準値である。この閾値Thをアクセル開度が超えている場合には、さらなるアクセルの踏み増しが期待できないものと判断し、待機制御の実行を抑制している。つまり、アクセル開度が閾値Th以上となっている場合には(S201:No)、待機制御を開始せずに、または継続中であれば待機制御を終了し、変速制御装置80による変速制御が開始される(S104)。
【0043】
次に、変速制御装置80は、変速指令の送出時における車速およびアクセル開度の変化速度に基づいて、次回の変速指令が送出されるまでの次指令時間Pnを算出する(S202)。そのため、変速制御装置80は、先ず、変速マップデータ上における車両状態の遷移を勘案し、第4速段を要求する次回の変速指令が送出される時刻を推定する。そして、変速指令の送出時から当該時刻までの差分から次指令時間Pnを算出する。
【0044】
より具体的には、例えば、車速の変化速度およびアクセル開度の変化速度から求められる車両状態の変化特性を示す曲線と、変速線L4との交点を求める。そして、現在のアクセル開度から上記の変化速度でアクセル開度が上昇した場合に、変速線L4の交点におけるアクセル開度に達するまでに要する時間を次指令時間Pnとして算出する。また、次指令時間Pnの算出をより簡易にするために、車両状態の変化特性を直線で近似したり、車速を一定とみなしたりする構成としてもよい。
【0045】
さらに、変速制御装置80は、現在送出されている変速指令に応じた変速制御に要するシフト時間Psを算出する(S203)。つまり、変速制御装置80は、現在の第6速段から第5速段に変速制御する場合に、要する時間をシフト時間Psとして算出する。このシフト時間Psは、現在変速段と要求変速段、プレシフトの状態などに応じて変動し、これらの情報を勘案して算出することが可能である。ここでは、第5速段へのプレシフトが完了していることから比較的短いシフト時間として算出される。
【0046】
続いて、変速制御装置80は、算出した次指令時間Pnとシフト時間Psを比較する(S204)。ここで、次指令時間Pnよりもシフト時間Psの方が長い場合には、変速機1が次回の変速指令に対して変速制御を即時に実行開始できない状態(ビジーシフトの発生)となることが想定される。つまり、S204では、次指令時間Pnとシフト時間Psの比較により、次回の変速指令が送出された際にビジーシフトとなるか否かを判定しているとも言える。
【0047】
ここでは、変速機1がプレシフトを利用した高速のシフト変更が可能であり、次指令時間Pnがシフト時間Psよりも長いものとして(S204:No)、変速制御装置80による変速制御が開始される(S104)。その後に、変速制御を開始したために、上述したタイマーおよび待機制御フラグFのリセット処理を行って(S105)、制御プログラムを終了する。そして、時刻t2において最初に送出された第5速段への変速指令に基づく変速制御が終了する。
【0048】
このように、次指令時間Pnがシフト時間Psよりも長い場合には(S204:No)、要求変速段(第5速段)への変速が完了した後に次回の変速指令が送出されるものと推定できる。つまり、現在の要求変速段への変速制御を開始した場合に、次回の変速指令の送出よりも早く当該変速制御が完了することになるため、次回の変速指令が送出されてもビジーシフトが発生しないことになる。
【0049】
次に、運転者によるアクセルの踏み込みが継続している状態では、アクセル開度が時刻t1と同様の変化速度で上昇し、図3に示すように、時刻t3において第4速段を要求する変速指令が送出される。そうすると、変速制御装置80は、再び現在のところ要求された変速段(第4速段)への変速制御が実行可能な状態であるかを判定する(S101)。ここでは、第5速段への変速制御が終了しているため、次の変速制御を実行可能な状態(S101:Yes)にあるものとする。そうすると、変速制御装置80は、現在の変速段(第5速段)と要求変速段(第4速段)の段差を算出する(S102)。ここでは、同様に段差が1段として算出され、段差ありと判定される(S103:Yes)。
【0050】
続いて、変速制御装置80は、変速指令の送出時におけるアクセル開度と閾値Thを比較する(S201)。ここでは、アクセル開度が閾値Thを下回っているものとし(S201:Yes)、変速制御装置80は、次指令時間Pnの算出(S202)に移行する。変速制御装置80は、先程と同様に、変速マップデータ上における車両状態の遷移を勘案し、第3速段を要求する次回の変速指令が送出される時刻を推定する。そして、変速指令の送出時から当該時刻までの差分から次指令時間Pnを算出する。
【0051】
さらに、変速制御装置80は、現在送出されている変速指令に応じた変速制御に要するシフト時間Psを算出する(S203)。つまり、変速制御装置80は、現在の第5速段から第4速段に変速制御する場合に、要する時間をシフト時間Psとして算出する。ここでは、変速機1が第5速段への変速直後であることから、シフト時間Psは、最初に行った第6速段から第5速段へのプレシフトを利用した変速制御と比較して長くなる。
【0052】
そして、変速制御装置80は、再び、算出した次指令時間Pnとシフト時間Psを比較する(S204)。ここでは、先程よりもシフト時間Psが長くなったこともあり、次指令時間Pnがシフト時間Psよりも短いものとして(S204:Yes)、待機制御の実行に移行する。つまり、第4速段への変速制御を開始すると、第3速段を要求する変速指令が送出された時点でビジーシフトの発生が想定されるため、第4速段への変速制御の実行を待機させる。
【0053】
次に、待機制御フラグFに基づいて、現在のところ待機制御中であるかを判定する(S205)。ここでは、まだ待機制御が開始されていないので(S205:Yes)、待機時間Pwを設定する(S301)。変速制御装置80は、次指令時間Pnに所定の余裕時間を加算した時間を待機時間Pwとして設定する。この余裕時間は、算出された次指令時間Pnの誤差を許容するものであり、予め設定されている。また、待機時間Pwは、シフト時間Ps以下となるように設定される。
【0054】
そして、変速制御装置80は、タイマーをスタートさせるとともに待機制御フラグFを立てて(S304)、制御プログラムを終了する。このように、変速制御装置80は、本来であれば第5速段への変速制御が完了し既出の変速指令(第4速段)に基づく変速制御を開始するところ、各条件(S103,S201,S204において判定)を満たす場合に、変速制御の実行を待機する待機制御を行うものである。待機制御が開始され次回の変速指令が送出される前においては、(S101)〜(S103:Yes)、続いて(S201)〜(S204:Yes)と移行し、S205では待機制御中と判定される(S205:No)。
【0055】
そして、変速制御装置80は、タイマーと待機時間Pwを比較し(S206)、待機時間Pwよりも短い場合には(S206:Yes)、制御プログラムを終了し待機制御を継続させる。S206において、タイマーと待機時間Pwを比較するのは、待機制御を中断して既出の変速指令に基づく変速制御を開始するためである。つまり、待機時間Pwの間に次回の変速指令が送出されるものと推定されていたにも関わらず、車両状態の変化などにより次回の変速指令が送出されなかった場合などが想定される。
【0056】
その後に、運転者によるアクセルの踏み込みが継続されている状態では、アクセル開度が時刻t3と同様の変化速度で上昇し、図3に示すように、時刻t4において第3速段を要求する変速指令が送出される。そうすると、変速制御装置80は、再び現在のところ要求された変速段(第3速段)への変速制御が実行可能な状態であるか判定する(S101)。ここでは、上述したように、第5速段への変速制御が終了しているため、次の変速制御を実行可能な状態(S101:Yes)にある。そうすると、変速制御装置80は、現在の変速段(第5速段)と要求変速段(第3速段)の段差を算出する(S102)。ここでは、段差が2段として算出され、段差ありと判定される(S103:Yes)。
【0057】
これにより、変速制御装置80は、(S201)〜(S204)と移行する。ここで、運転者によるアクセルの踏み込みにより、アクセル開度が時刻t4において閾値Th以上となっている場合には(S201:No)、待機制御を終了し、変速制御装置80による変速制御が開始される(S104)。また、第2速段を要求する次回の変速指令が送出されるまでの次指令時間Pn、および現在の第5速段から第3速段に変速する場合に要するシフト時間Psが再び算出され(S202,S203)、両者を比較する(S204)。ここでは、第2速段を要求する次回の変速指令が送出されるまで、ある程度の期間があるものとする。そうすると、次指令時間Pnがシフト時間Psよりも短い(S204:No)ので、ビジーシフトが発生しないものと想定される状態となったものと判断し、変速制御装置80による変速制御が開始される(S104)。
【0058】
上述したように、時刻t4において変速指令が送出された時点で、現在の第5速段から第3速段への変速制御を開始することが妥当であると判断され、この変速制御を開始するものとした。一方で、車両状態によっては、さらに第2速段を要求する次回の変速指令が、新たに算出されたシフト時間Psよりも短い間に送出されることも想定される。そのような場合には、さらに待機時間Pwを再設定するなどして待機制御を継続し、第2速段への変速指令が素出された後に第5速段から第2速段への変速制御を実行するようにしてもよい。
【0059】
最後に、変速制御装置80は、変速指令による要求変速段(第3速段)への変速制御を開始(S104)する。そして、タイマーおよび待機制御フラグFをリセットする処理を行い(S105)、待機制御および制御プログラムを終了する。この第5速段から第3速段への変速制御は、時刻t4において送出された第3速段を要求する変速指令に応じて変速制御を即時に開始したシフトである。そして、変速制御装置80による第二シフト機構70dおよびデュアルクラッチ30の制御、および第二入力軸12の同期制御などを経て、時刻t5においてシフトが完了する。
【0060】
(実施形態の効果)
上述したデュアルクラッチ式の変速機1によると、シフト時間Psおよび次指令時間Pnを比較してシフト時間Psが長い、即ちビジーシフトの発生が想定される場合に、待機時間Pwだけ変速制御の実行を待機する待機制御を行うものとした。これにより、想定した通りに待機時間Pwの間に変速指令が送出されると、変速制御装置80は、新たに送出された変速指令に応じた変速制御の実行を即時に開始することができる。そして、複数回に亘って送出された変速指令に対して1回の変速制御で最終的な要求変速段へシフトすることができる。よって、ビジーシフトの発生を抑制することができるとともに、変速回数を低減しクラッチ機構やシフト機構の負荷を低減することが可能となる。
【0061】
ここで、例示した車両状態において待機制御を行わなかった場合について説明する。変速制御装置は、図3の破線で示すように、時刻t2において、最初に送出された第5速段への変速指令に基づく変速制御を終了している。そのため、時刻t3において第4速段を要求する変速指令が送出されると、第5速段から第4速段への変速制御が開始される。その後に、時刻t4において第3速段を要求する変速指令が送出されるが、変速制御中であるため、この変速指令に対して即時に変速制御を実行できないビジーシフトが発生する。時刻t4−2において第4速段への変速制御が完了し、この時点から既出の変速指令による第3速段への変速制御が開始される。そして、待機制御を行わなかった場合には、時刻t5−2においてシフトが完了する。このように、待機制御を行った場合と行わなかった場合では、変速制御の回数を低減できる上に、最終的にシフトが完了する時間を短縮することができる。
【0062】
また、変速制御装置80は、変速指令の送出時における車両速度およびアクセル開度の変化速度に基づいて次指令時間Pnを算出するものとした。次回の変速指令は、車両状態とマップデータに基づいて送出されるタイミングが変動することから、特に車両速度およびアクセル開度の変化速度から送出される時刻を推定することができる。これにより、現在から次回の変速指令が送出されるまでの次指令時間Pnを高精度に算出することができる。よって、変速制御装置80は、変速制御の実行を待機する待機制御の要否をより確実に判定することができる。
【0063】
さらに、変速制御装置80は、待機時間Pwを次指令時間Pn以上に且つシフト時間Ps以下に設定するものとした。これにより、変速制御の実行を待機する待機時間Pwを好適に設定することができる。ここで、仮に待機時間Pwだけ変速制御の実行を待機している間に車両状態が変化し、さらなる変速指令が待機時間Pw内に送出されないことも想定される。このような場合においても、待機時間Pwを好適に設定することにより、現在送出されている変速指令による変速制御に速やかに移行することができる。従って、待機時間Pwの待機による時間的損失を低減できる。
【0064】
変速制御装置80は、シフト時間Psが次指令時間Pnよりも長いことに加えて、変速指令の送出時におけるアクセル開度が予め設定されている閾値より小さいことを条件として変速制御の実行を待機させる待機制御を実行する構成とした。変速制御装置80による待機制御は、次回の変速指令が待機時間Pw内に送出されることを想定して実行される。そして、次回の変速指令は、マップデータに基づいて車両状態に対応して送出されるが、特にアクセルが踏み増しされている状態ではアクセル開度が上昇し短時間のうちに送出されやすい。一方で、アクセル開度が所定以上であると、運転者の加速要求に応えるために変速を行わずに現在の変速段でエンジン回転数を上昇させるように制御することが多く、さらにアクセルの踏み増しが期待できないので次回の変速指令が送出されにくい。そこで、上記のような構成とすることで、待機制御の要否をより確実に判定することができる。
【0065】
<実施形態の変形態様>
本実施形態において、変速機1がデュアルクラッチ式自動変速機であるものとして説明した。これに対して、デュアルクラッチ式でなくても3段以上の変速段を有する自動変速機であれば、本発明を適用することができる。その場合においても、適用する自動変速機における次指令時間Pnおよびシフト時間Psを算出することで待機時間Pwを設定し、ビジーシフトの発生を抑制するとともに変速回数の低減を図ることができる。
【0066】
また、本実施形態において、変速制御装置80による待機制御として、第5速段から第3速段にダウン変速する場合を例示した。これに対して、何れの変速段における変速制御であっても、同様の待機制御を実行することが可能である。さらには、段差が1段または複数段の変速制御であっても、同様に待機制御を実行することが可能である。但し、変速機1の構成や仕様などを勘案し、段差が2段以上となった時点で待機制御を行わないように、待機制御の要否を判定するようにしてもよい。より具体的には、例えば、S103において、本実施形態では段差の有無を判定するようにしたが、ここで段差が1段である場合にのみS201に移行するように判定してもよい。これにより、既出の要求変速段への変速制御を実行することで運転者の加速指向に応えることができる。但し、ビジーシフトの発生を抑制し、変速回数を低減することを目的とする場合には、本実施形態で例示したような態様が好適である。
【0067】
さらに、本実施形態において、待機時間Pwについては、次指令時間Pnに余裕時間を加算して設定した。これに対して、予め設定された一定時間に設定したり、或いはアクセル開度またはその変化速度から算出したりする構成としてもよい。また、次指令時間Pnについても同様に、アクセル開度またはその変化速度に基づいてマップから簡易的に取得する構成としてもよい。
【符号の説明】
【0068】
1:変速機、 2:エンジン(原動機)、 3:ECU
11:第一入力軸、 12:第二入力軸
21:第一副軸、 22:第二副軸
30:デュアルクラッチ(クラッチ機構)
31:第一クラッチ、 32:第二クラッチ
41〜46:変速段の駆動ギヤ
51〜56:変速段の従動ギヤ、 52a:小径ギヤ
61,62:最終減速ギヤ、 63:後進ギヤ、 64:リングギヤ
65:パーキングギヤ
70a,70c:第一シフト機構、 70b、70d:第二シフト機構
71:ハブ、 72:スリーブ
80:変速制御装置
【特許請求の範囲】
【請求項1】
ケースに回転可能に支持された入力軸と、
原動機の回転駆動力を前記入力軸に伝達するクラッチ機構と、
前記入力軸に伝達された回転駆動力を変速する複数の変速段を選択的に成立させるシフト機構と、
前記シフト機構を動作させるとともに、変速指令が送出されると前記クラッチ機構の係合状態を切り換えて前記変速指令に応じた変速制御を実行する変速制御装置と、を備え、
前記変速制御装置は、前記変速指令が送出された際に、当該変速指令に応じた前記変速制御に要するシフト時間と現在から次回の変速指令が送出されるまでの次指令時間とを算出し、前記シフト時間が前記次指令時間よりも長い場合には待機時間だけ前記変速制御の実行を待機する自動変速機。
【請求項2】
請求項1において、
前記変速制御装置は、前記変速指令の送出時における車両速度およびアクセル開度の変化速度に基づいて前記次指令時間を算出する自動変速機。
【請求項3】
請求項1または2において、
前記変速制御装置は、前記待機時間を前記次指令時間以上に且つ前記シフト時間以下に設定する自動変速機。
【請求項4】
請求項1〜3の何れか一項において、
前記変速制御装置は、前記変速指令が送出された際に、前記シフト時間が前記次指令時間よりも長く、且つ前記変速指令の送出時におけるアクセル開度が予め設定された閾値より小さい場合には前記変速制御の実行を待機させる自動変速機。
【請求項1】
ケースに回転可能に支持された入力軸と、
原動機の回転駆動力を前記入力軸に伝達するクラッチ機構と、
前記入力軸に伝達された回転駆動力を変速する複数の変速段を選択的に成立させるシフト機構と、
前記シフト機構を動作させるとともに、変速指令が送出されると前記クラッチ機構の係合状態を切り換えて前記変速指令に応じた変速制御を実行する変速制御装置と、を備え、
前記変速制御装置は、前記変速指令が送出された際に、当該変速指令に応じた前記変速制御に要するシフト時間と現在から次回の変速指令が送出されるまでの次指令時間とを算出し、前記シフト時間が前記次指令時間よりも長い場合には待機時間だけ前記変速制御の実行を待機する自動変速機。
【請求項2】
請求項1において、
前記変速制御装置は、前記変速指令の送出時における車両速度およびアクセル開度の変化速度に基づいて前記次指令時間を算出する自動変速機。
【請求項3】
請求項1または2において、
前記変速制御装置は、前記待機時間を前記次指令時間以上に且つ前記シフト時間以下に設定する自動変速機。
【請求項4】
請求項1〜3の何れか一項において、
前記変速制御装置は、前記変速指令が送出された際に、前記シフト時間が前記次指令時間よりも長く、且つ前記変速指令の送出時におけるアクセル開度が予め設定された閾値より小さい場合には前記変速制御の実行を待機させる自動変速機。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2013−87836(P2013−87836A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2011−227785(P2011−227785)
【出願日】平成23年10月17日(2011.10.17)
【出願人】(592058315)アイシン・エーアイ株式会社 (490)
【Fターム(参考)】
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成23年10月17日(2011.10.17)
【出願人】(592058315)アイシン・エーアイ株式会社 (490)
【Fターム(参考)】
[ Back to top ]