
自動変速装置
【課題】自転車の車輪の回転速度に応じて自動的に変速を行う。
【解決手段】自転車1においては、内周側ほどその幅が狭くなったベルト4が、ペダル2に接続されたクランクプーリ5、車輪3に接続された車輪用プーリ6、アイドラプーリ7及びテンションプーリ8に懸架されている。車輪用プーリ6は、車輪3の回転軸とともに回転する互いに対向して配置された2つのプーリ片11、12、移動可能なプーリ片12を固定されたプーリ片11に向かって付勢するバネ13を有している。テンションプーリ8は支点16aを中心として揺動可能に構成されたアーム16に接続されている。そして、アーム16が反時計回りに揺動するほど、テンションプーリによりベルト4がその外周側に押し広げられて、ベルト4の張力が大きくなり、その結果、プーリ片12がバネ13の付勢力に抗してプーリ片11から離れて、車輪用プーリ6におけるベルト4が懸架される部分の径が小さくなる。
【解決手段】自転車1においては、内周側ほどその幅が狭くなったベルト4が、ペダル2に接続されたクランクプーリ5、車輪3に接続された車輪用プーリ6、アイドラプーリ7及びテンションプーリ8に懸架されている。車輪用プーリ6は、車輪3の回転軸とともに回転する互いに対向して配置された2つのプーリ片11、12、移動可能なプーリ片12を固定されたプーリ片11に向かって付勢するバネ13を有している。テンションプーリ8は支点16aを中心として揺動可能に構成されたアーム16に接続されている。そして、アーム16が反時計回りに揺動するほど、テンションプーリによりベルト4がその外周側に押し広げられて、ベルト4の張力が大きくなり、その結果、プーリ片12がバネ13の付勢力に抗してプーリ片11から離れて、車輪用プーリ6におけるベルト4が懸架される部分の径が小さくなる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自転車の車輪の回転速度に応じて自動的に変速を行う自動変速装置に関する。
【背景技術】
【0002】
特許文献1に記載の自転車用無段変速装置においては、ハンドルを操作すると、変速用ベルト及び変速用ベルトを介してハンドルに接続された変速用ナットが回転し、変速用ナットが移動する。これに伴って、変速用ナットに隣接して配置された、ペダルをこぐと回転する可変プーリを構成する2つのプーリ片の一方である可動プーリ片が移動して、2つのプーリ片の間の距離が変化し、2つのプーリ片の距離に応じて、可変プーリのVベルトが懸架される部分の径が変化する。そして、可変プーリのVベルトが懸架される部分の径が大きくなると、車輪用のプーリの径に対する可変プーリの径の比が大きくなるため、可変プーリの回転量に対する車輪用プーリの回転量が大きくなり、ペダルの回転速度を増加させたときに、車輪の回転速度を大きく増加させることができる。一方、可変プーリのVベルトが懸架される部分の径が小さくなると、車輪用のプーリの径に対する可変プーリの径の比が小さくなるため、可変プーリの回転量に対する車輪用プーリの回転量が小さくなり、ペダルを回転させるのに必要な力が小さくなる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−183995号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載の自転車用無段変速装置では、自転車に乗っている人が、自転車の運転中に自身で判断してハンドルを操作することにより変速を行う必要がある。このため、変速操作に慣れていない人が変速操作を行った場合には、適切に変速を行うことができず、ペダルを回転させるために大きな力を必要とする、あるいは、車輪を高速に回転させることができない虞がある。また、ハンドルによる変速操作に気を取られるなどした場合には、安全上問題が生じる虞がある。
【0005】
本発明の目的は、自転車の車輪の回転速度に応じて自動的に変速させることが可能な自動変速装置を提供することである。
【課題を解決するための手段】
【0006】
第1の発明に係る自動変速装置は、自転車に用いられる自動変速装置であって、前記自転車のペダルの回転軸とともに回転するクランクプーリと、前記自転車の車輪の回転軸とともに回転する車輪用プーリと、前記クランクプーリ及び前記車輪用プーリに懸架された無端状のベルトと、前記ベルトの張力を変化させる張力変更手段と、前記車輪の回転速度を検出する回転速度検出手段とを備えており、前記クランクプーリ及び前記車輪用プーリの一方が、前記ベルトの張力が大きくなるほどその前記ベルトが懸架される部分の径が小さくなる可変プーリにより構成されており、前記張力変更手段は、前記回転速度検出手段により検出された前記車輪の回転速度に応じて前記ベルトの張力を変化させることを特徴とするものである。
【0007】
これによると、ベルトの張力が小さい場合には、可変プーリにおけるベルトが懸架される部分の径が大きくなり、ベルトの張力が大きい場合には、可変プーリにおけるベルトが懸架される部分の径が小さくなる。したがって、回転速度検出手段により検出した車輪の回転速度に応じて、張力変更手段によりベルトの張力を変化させることにより、可変プーリにおけるベルトが懸架される部分の径を自動的に変化させて変速を行うことが可能となる。
【0008】
第2の発明に係る自動変速装置は、第1の発明に係る自動変速装置であって、前記ベルトがその内周側ほど幅が小さくなったVベルトであって、前記可変プーリが、前記ペダルの回転軸の延在方向に配列されることによって互いに対向しており、前記ペダルの回転軸と一体的に回転するとともに、前記ペダルの回転軸の延在方向に相対移動可能に構成された2つのプーリ片と、前記2つのプーリ片の少なくとも一方を、前記2つのプーリ片が互いに近づく方向に付勢する付勢手段とを備えており、前記2つのプーリ片は、前記ベルトが懸架される部分の径が、互いの対向面に近い部分ほど小さくなっていることを特徴とするものである。
【0009】
これによると、ベルトの張力が大きい場合には、2つのプーリ片が付勢手段の付勢力に抗して互いに離れる方向に移動するため、ベルトが2つのプーリ片の径が小さい部分に懸架されることになり、ベルトの張力が小さい場合には、2つのプーリ片が付勢手段の付勢力により互いに近づく方向に移動するため、ベルトが2つプーリ片の径が大きい部分に懸架されることになる。したがって、2つのプーリ片と付勢手段とにより、ベルトの張力が大きくなるほど、ベルトが懸架される部分における径が小さくなるような可変プーリを容易に形成することができる。
【0010】
第3の発明に係る自動変速装置は、第1又は第2の発明に係る自動変速装置であって、前記車輪用プーリが前記可変プーリによって構成されており、前記張力変更手段は、前記回転速度検出手段により検出された前記車輪の回転速度が速いほど、前記ベルトの張力が大きくなるように、前記ベルトの張力を変化させることを特徴とするものである。
【0011】
これによると、車輪の回転速度が遅い場合には、ベルトの張力が小さくなることにより、可変プーリである車輪用プーリにおけるベルトが懸架される部分の径が大きくなり、車輪用プーリにおけるベルトが懸架される部分の径に対するクランクプーリの径の比が小さくなる。これにより、クランクプーリの回転量に対する車輪用プーリの回転量が小さくなり、ペダルを回転させるのに必要な力が小さくなる。
【0012】
一方、車輪の回転速度が速い場合には、ベルトの張力が大きくなることにより、可変プーリである車輪用プーリにおけるベルトが懸架された部分の径が小さくなり、車輪用プーリにおけるベルトが懸架される部分の径に対するクランクプーリの径の比が大きくなる。これにより、クランクプーリの回転量に対する車輪用プーリの回転量が大きくなり、ペダルの回転速度を増加させたときに、車輪用プーリの回転速度を大きく増加させることができる。
【0013】
第4の発明に係る自動変速装置は、第1又は第2の発明に係る自動変速装置であって、前記クランクプーリが前記可変プーリによって構成されており、前記張力変更手段は、前記回転速度検出手段により検出された前記車輪の回転速度が速いほど、前記ベルトの張力が小さくなるように、前記ベルトの張力を変化させることを特徴とするものである。
【0014】
これによると、車輪の回転速度が遅い場合には、ベルトの張力が大きくなることにより、可変プーリであるクランクプーリにおけるベルトが懸架される部分の径が小さくなり、車輪用プーリの径に対するクランクプーリにおけるベルトが懸架される部分の径の比が小さくなる。これにより、クランクプーリの回転量に対する車輪用プーリの回転量が小さくなり、ペダルを回転させるのに必要な力が小さくなる。
【0015】
一方、車輪の回転速度が速い場合には、ベルトの張力が小さくなることで、可変プーリであるクランクプーリにおけるベルトが懸架される部分の径が大きくなり、車輪用プーリの径に対するクランクプーリにおけるベルトが懸架される部分の径の比が大きくなる。これにより、クランクプーリの回転量に対する車輪用プーリの回転量が大きくなり、ペダルの回転速度を増加させたときに、車輪用プーリの回転速度を大きく増加させることができる。
【0016】
第5の発明に係る自動変速装置は、第1〜第4のいずれかの発明に係る自動変速装置であって、前記張力変更手段が、所定の支点を中心として揺動可能に構成されたアームと、前記アームに接続されており、前記ベルトが懸架されるテンションプーリと、前記アームを揺動させるモータとを有していることを特徴とするものである。
【0017】
これによると、ベルトが懸架されたテンションプーリと接続されたアームを揺動させることにより、容易にベルトの張力を変化させることができる。
【0018】
第6の発明に係る自動変速装置は、第5の発明に係る自動変速装置であって、前記車輪用プーリに固定されているとともに、前記ベルトが懸架されるアイドラプーリをさらに備えており、前記アームが、前記アイドラプーリの中心を支点として揺動可能に構成されていることを特徴とするものである。
【0019】
これによると、アームの支点がアイドラプーリの中心に位置しているので、自転車の構成が簡単になる。
【0020】
第7の発明に係る自動変速装置は、第5又は第6の発明に係る自動変速装置であって、前記張力変更手段が、前記アームの揺動角度を決定する角度決定手段とをさらに備えており、前記角度決定手段は、前記回転速度検出手段により検出された前記車輪の回転速度に応じて、前記アームの揺動角度を決定し、前記モータは、前記角度決定手段により決定された角度だけ、前記アームを揺動させることを特徴とするものである。
【0021】
これによると、アームを、車輪の回転速度に応じて決定された角度だけ揺動させることにより、容易に、車輪の回転速度に応じてベルトの張力を変化させることができる。
【0022】
第8の発明に係る自動変速装置は、第5〜第7のいずれかの発明に係る自動変速装置であって、前記車輪の回転速度に対応する前記アームの揺動角度が互いに異なる複数のモードで動作可能であり、前記張力変更手段が、前記複数のモードのうち、いずれのモードで動作させるかを決定するモード決定手段をさらに備えており、前記角度決定手段は、前記回転速度検出手段により検出された前記車輪の回転速度と、前記モード決定手段により決定されたモードとに応じて、前記アームの揺動角度を決定することを特徴とするものである。
【0023】
これによると、車輪の回転速度に対応するアームの揺動角度、つまり、車輪の回転速度に対応するベルトの張力が互いに異なる複数のモードで動作することができるようにすることにより、例えば、力の強い人が自転車に乗る場合などに適した、ペダルを回転させるのに必要な力は大きくなるものの、ペダルの回転速度を増加させたときには、車輪の回転速度が特に大きく増加するような変速と、これとは逆に、力の弱い人が自転車に乗る場合などに適した、ペダルの回転速度を増加させたときに、車輪回転速度はそれほど大きく増加しないものの、ペダルを回転させるのに必要な力が小さくてすむような変速とを切り替えることなどが可能となる。
【発明の効果】
【0024】
本発明によれば、ベルトの張力が小さい場合には、可変プーリにおけるベルトが懸架される部分における径が大きくなり、ベルトの張力が大きい場合には、可変プーリにおけるベルトが懸架される部分の径が小さくなる。したがって、回転速度検出手段により検出した車輪の回転速度に応じて、張力変更手段によりベルトの張力を変化させることにより、可変プーリにおけるベルトが懸架される部分の径を自動的に変化させて変速を行うことが可能となる。
【図面の簡単な説明】
【0025】
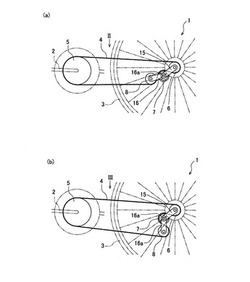
【図1】本発明における実施の形態に係る自転車の概略構成図であり、(a)が、アームが最大限時計回りに揺動した状態、(b)が、アームが最大限反時計回りに揺動した状態をそれぞれ示している。
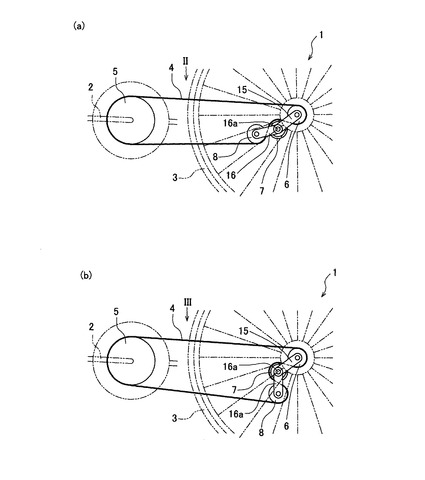
【図2】図1(a)を矢印IIの方向から見た図である。
【図3】図1(b)を矢印IIIの方向から見た図である。
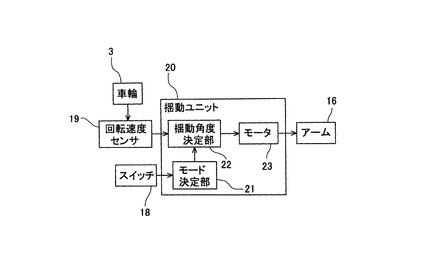
【図4】アームを揺動させる揺動制御装置のブロック図である。
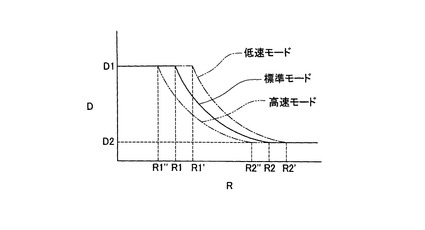
【図5】車輪の回転速度と、車輪用プーリにおけるベルトが懸架される部分の径との関係を示す図である。
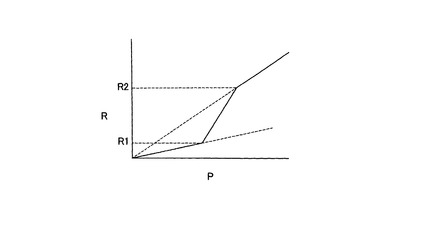
【図6】ペダルの回転速度と、車輪の回転速度との関係を示す図である。
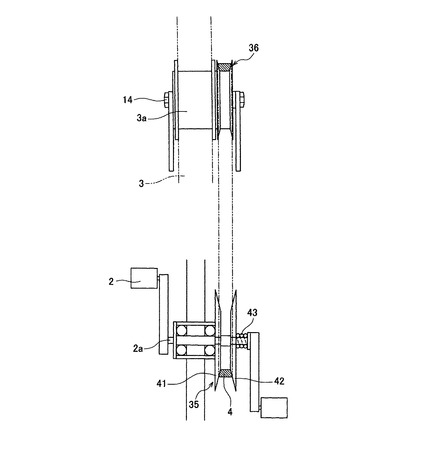
【図7】変形例1の図3相当の図である。
【図8】変形例1の図2相当の図である。
【図9】変形例2の図5相当の図である。
【発明を実施するための形態】
【0026】
以下、本発明の好適な実施の形態について説明する。
【0027】
図1は、本実施の形態に係る自転車の一部を示す概略構成図であり、(a)が、後述するアーム16が最大限時計回りに揺動した状態、(b)が、アーム16が最大限反時計回りに揺動した状態をそれぞれ示している。図2は図1(a)を矢印IIの方向から見た図である。図3は図1(b)を矢印IIIの方向から見た図である。ただし、図面を分かりやすくするため、図2、図3においては、後述する、アイドラプーリ7、テンションプーリ8、アーム16などの図示を省略している。
【0028】
図1〜図3に示すように、自転車1は、ペダル2及び車輪3と、ペダル2の回転を車輪3に伝達するためのベルト4、クランクプーリ5、車輪用プーリ6、アイドラプーリ7及びテンションプーリ8とを有している。ペダル2及び車輪3の構成は、従来の自転車のものと同様であるので、ここではその詳細な説明は省略する。なお、車輪3の回転速度は、後述する回転速度センサ19(図4参照)により検出される。
【0029】
ベルト4は、クランクプーリ5、車輪用プーリ6、アイドラプーリ7及びテンションプーリ8に懸架された無端状のベルトであり、図2、図3に示すように、内周側の部分ほどその幅が狭くなった略台形の断面形状を有するいわゆるVベルトである。
【0030】
クランクプーリ5は、ペダル2の回転軸2aと接続されており、ペダル2を回転させると、回転軸2aとともにクランクプーリ5が回転する。
【0031】
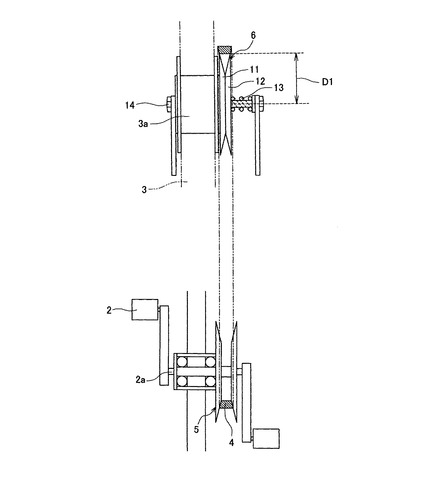
車輪用プーリ6は、車輪の回転軸3aにボルト14により固定されており、車輪用プーリ6が回転することにより車輪3が回転する。また、車輪用プーリ6は、いわゆる可変プーリであって、2つのプーリ片11、12及びバネ13を有している。
【0032】
2つのプーリ片11、12は、回転軸3aの延在方向(図2、図3の左右方向)に配列されることで互いに対向しており、回転軸3aと一体に回転する。また、プーリ片11、12は、互いの対向面に近い部分ほどその径が小さくなっている。つまり、プーリ片11は図2、図3の右側の部分ほどその径が小さくなっており、プーリ片12は、図2、図3の左側の部分ほどその径が小さくなっている。そして、ベルト4は、プーリ片11、12のこの径が変化している部分に懸架される。
【0033】
プーリ片11は、車輪3の回転軸3aに固定されており、プーリ片12は、回転軸3aの延在方向(図2、図3の左右方向)に移動可能となっている。すなわち、プーリ片11とプーリ片12とは、回転軸3aの延在方向に相対移動可能となっている。ただし、プーリ12は回転軸3aの回転方向に対する周り止めを有しており、回転軸3aが回転したときにのみ回転する。バネ13は図2、図3におけるプーリ片12の右側に配置されており、プーリ片12をプーリ片11に向かって図2、図3の左方に(プーリ片11とプーリ片12とが互いに近づく方向に)付勢している。
【0034】
これにより、車輪用プーリ6においては、後述するようにベルト4の張力が小さい場合には、バネ13の付勢力によりプーリ片12がプーリ片11に近づき(図2、図3の左方に移動し)、これより、ベルト4がクランクプーリ5の外周側に押し出され、車輪用プーリ6におけるベルト4が懸架される部分の径が大きくなる。
【0035】
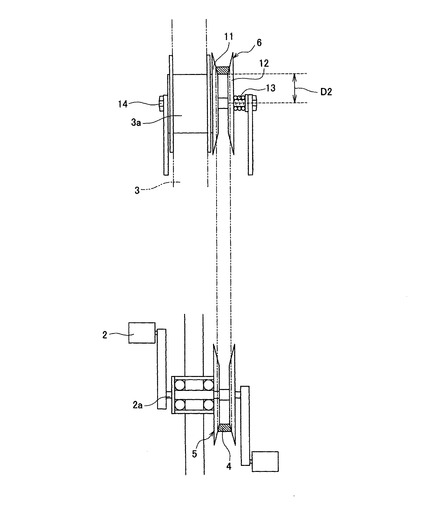
一方、ベルト4の張力が大きくなると、プーリ片12はベルト4によりその内周側に押され、これにより、バネ13の付勢力に抗してプーリ片11から離れる(図2、図3の右方に移動する)。これにより、ベルト4が車輪用プーリ6の内周側に食い込み、車輪用プーリ6におけるベルト4が懸架される部分の径が小さくなる。
【0036】
アイドラプーリ7は、自転車1本体に固定された連結部材15のベアリングを介して回転自在になっている。テンションプーリ8は、アーム16により、アイドラプーリ7と連結されている。
【0037】
アーム16は、アイドラプーリ7の中心に位置する支点16aを中心として、図1(a)に示す位置と図1(b)に示す位置との間で揺動可能となっている。そして、アーム16が揺動するのに連動して、アーム16に連結されたテンションプーリ8も支点16aを中心として揺動する。
【0038】
そして、アーム16が図1の反時計回りに揺動して図1(b)に示す位置に近づくほど、ベルト4が、テンションプーリ8によりその外周側に大きく押し広げられ、その結果、ベルト4の張力が大きくなる。
【0039】
このように、本実施の形態では、ベルト4が懸架されたテンションプーリ8と接続されたアーム16を揺動させることにより、ベルト4の張力を容易に変化させることができる。また、アーム16の支点16aがアイドラプーリ7の中心に位置しているので、自転車1の構成が簡単になる。
【0040】
次に、アーム16を揺動させる揺動ユニットについて説明する。図4は、アーム16を揺動させる揺動ユニット20のブロック図である。揺動ユニット20は、モード決定部21、角度決定部22、モータ23などを有している。なお、本実施の形態においては、テンションプーリ8、アーム16及び揺動ユニット20をあわせたものが、本発明に係る張力変更手段に相当する。
【0041】
ここで、自転車1においては、所定の通常モードのほか、後述するように、力の弱い人が自転車1に乗る場合などに適した、ペダル2の回転速度を増加させても、車輪3の回転速度は通常モードの場合ほど大きくは増加しないものの、ペダル2を回転させるのに必要な力が通常モードよりも小さいモード(以下、低速モードとする)、及び、力の強い人が自転車1に乗る場合などに適した、ペダル2を回転させるのに必要な力は通常モードよりも大きくなってしまうものの、ペダル2の回転速度を増加させたときに、車輪3の回転速度を通常モードよりも大きく増加させることができるモード(高速モード)のいずれかのモードに切り替えることできるようになっている。
【0042】
また、上記標準モード、低速モード及び高速モードは、自転車1に乗る人が自転車1に設けられたスイッチ18を操作することにより選択される。モード決定部21は、スイッチ18による操作を受けて、通常モード、低速モード及び高速モードのいずれのモードで動作させるかを決定する。
【0043】
角度決定部22は、モード決定部21により決定されたモード、及び、回転速度センサ19より検出された車輪3の回転速度に応じて、図1(a)に示す位置からのアーム16の反時計回りの揺動角度を決定する。より詳細には、回転速度センサ19により検出された車輪の回転速度が速いほど、アーム16が図1(a)に示す位置から揺動角度が大きくなるように揺動角度を決定する。また、車輪3の各回転速度に対応する揺動角度は、高速モード、標準モード、及び、低速モードの順に揺動角度が大きくなる(互いに異なる)ようにする。
【0044】
モータ23は、例えばステッピングモータなどである。モータ23は、アーム16の支点16aに接続されており、角度決定部22により決定された揺動角度だけアーム16を揺動させる。
【0045】
これにより、アーム16の揺動に連動して、テンションプーリ8が、角度決定部22により決定された角度だけ揺動し、その結果、ベルト4の張力が変化する。そして、このように、アーム16を、車輪3の回転速度に応じて角度決定部22において決定された角度だけ揺動させることにより、容易に、車輪3の回転速度に応じてベルト4の張力を変化させることができる。
【0046】
次に、自転車1における変速動作について説明する。図5は、車輪3の回転速度R(自転車1の走行速度)と車輪用プーリ6におけるベルト4が懸架される部分の径Dとの関係を示す図である。図6は、ペダル2の回転速度Pと車輪3の回転速度Rとの関係を示す図である。
【0047】
自転車1は、停止時においては、図1(a)、図2に示すように、アーム16が最大限、図1の時計回りに揺動した状態となっており、ベルト4の張力が最小となっている。これにより、図2に示すように、車輪用プーリ6を構成するプーリ片12が、バネ13の付勢力によりプーリ片11に当接している、つまり、最大限プーリ片11に近接している。したがって、ベルト4が、車輪用プーリ6の外周側に最大限押し出された状態となり、車輪用プーリ6におけるベルト4が懸架される部分の径が最大(D1)となっている。
【0048】
停止した状態の自転車1を発進させる場合や、登り坂にかかって車輪3の回転速度が遅い場合などには、ペダル2を回転させるために比較的大きな力が必要となるが、車輪用プーリ6におけるベルト4が懸架される部分の径が最大(D1)となっているため、車輪用プーリ6におけるベルト4が懸架される部分の径に対するクランクプーリ5の径の比が小さくなる。これにより、クランクプーリ5(ペダル2)の回転量に対する車輪用プーリ6(車輪3)の回転量が小さくなり、その結果、ペダル2を回転させるために必要な力が小さくなる。
【0049】
ただし、この状態では、クランクプーリ5(ペダル2)の回転量に対する車輪用プーリ6(車輪3)の回転量が小さいため、図6に示すように、ペダル2の回転速度を上げても、車輪3の回転速度はそれほど大きくは増加しない。
【0050】
そして、標準モードの場合には、車輪3の回転速度が所定の回転速度R1よりも遅いときには、この状態を保持し、車輪3の回転速度が回転速度R1以上となったときに、車輪3の速度増加に合わせてアーム16を連続的に揺動させることにより、図5に示すように、車輪3の回転速度が速くなるほど、アーム16を大きく図1の反時計回りに揺動させる。つまり、図1(a)に示す状態から図1(b)に示す状態(図2に示す状態から図3に示す状態)に近づけていく。
【0051】
ここで、アーム16を大きく図1の反時計回りに揺動させるほど、ベルト4がその外周側に広げられて、ベルト4の張力が大きくなる。そして、ベルト4の張力が大きくなると、プーリ片12がバネ13の付勢力に抗してプーリ片11から離れる(図2、図3の右方に移動する)。これにより、ベルト4が車輪用プーリ6の内周側に食い込み、車輪用プーリ6におけるベルト4が懸架される部分の径が小さくなる。その結果、車輪用プーリ6におけるベルト4が懸架される部分の径に対するクランクプーリ5の径の比が大きくなる。
【0052】
そして、標準モードの場合には、車輪3の回転速度が所定の回転速度R2となったときに、図1(b)、図3に示すように、アーム16が最大限反時計回りに揺動した状態となり、車輪3の回転速度が回転速度R2以上であるときにはこの状態に保持される。このとき、車輪用プーリ6におけるベルト4が懸架される部分の径が最小(D2)となっている。
【0053】
そして、車輪用プーリ6におけるベルト4が懸架される部分の径に対するクランクプーリ5の径の比が大きくなると、クランクプーリ5(ペダル2)の回転量に対する車輪用プーリ6(車輪3)の回転量が大きくなり、図6に示すように、車輪3の回転速度が上記回転速度R1以上の場合には、車輪3の回転速度が回転速度R1よりも遅いときと比較して、ペダル2の回転速度を増加させたときに、車輪3の回転速度を大きく増加させることが可能となる。すなわち、ペダル2を踏み込む速度が特に大きくなくても速く走ることができる。
【0054】
また、車輪3の回転速度が上記回転速度R2以上である場合には、それ以上アーム16が揺動しないため、図6に示すように、ペダル2の回転速度を増加に対する車輪3の回転速度の増加の割合が、車輪3の回転速度が上記回転速度R1と上記回転速度R2の間である場合よりも小さくなる。
【0055】
一方、車輪3の回転速度が減少する場合には、上述したのとは逆となる。すなわち、車輪3の回転速度が上記回転速度R2以上のときには、図1(b)、図3に示すように、アーム16が最大限反時計回りに揺動し、ベルト4の張力が最大(車輪用プーリ6のベルト4が懸架される部分の径が最小(D2))となっている。
【0056】
車輪3の回転速度が回転速度R2よりも遅くなると、車輪3の回転速度が遅くなるほどアーム16が図1の時計回りに揺動し、これにより、ベルト4の張力が小さくなる(車輪用プーリ6のベルト4が懸架される部分の径が大きくなる)。そして、車輪3の回転速度が回転速度R1となったときに、アーム16が最大限時計回りに揺動し、ベルト4の張力が最小(車輪用プーリ6のベルト4が懸架される部分の径が最大(D1))となる。また、車輪3の回転速度が回転速度R1よりも遅いときには、アーム16が最大限時計回りに揺動した状態に保持される。
【0057】
なお、低速モードの場合には車輪3の回転速度が上記回転速度R1よりも速い回転速度R1’となったとき、高速モードの場合には車輪3の回転速度が上記回転速度R1よりも遅い回転速度R1’’となったときに、それぞれ、図5に示すようにアーム16を揺動させ始める(車輪用プーリ6におけるベルト4が懸架される部分の径を減少させ始める)。これにより、車輪3の各回転速度に対応するアーム16の揺動角度、つまり、車輪3の各回転速度に対応するベルト4の張力が、高速モード、標準モード及び低速モードの順に大きくなる。
【0058】
これにより、低速モードの場合には、通常モードと比較して、車輪用プーリ6のベルト4が懸架される部分の径に対するクランクプーリ5の径の比が小さくなり、クランクプーリ5(ペダル2)の回転量に対する、車輪用プーリ6(車輪3)の回転量が小さくなる。したがって、低速モードの場合には、ペダル2の回転速度を増加させても、車輪3の回転速度は、通常モードの場合ほど大きくは増加しないものの、ペダル2を回転させるのに必要な力は通常モードよりも小さくなる。
【0059】
一方、高速モードの場合には、通常モードと比較して、車輪用プーリ6のベルト4が懸架される部分の径に対するクランクプーリ5の径の比が大きくなり、クランクプーリ5(ペダル2)の回転量に対する、車輪用プーリ6(車輪3)の回転量が大きくなる。したがって、高速モードの場合には、ペダル2を回転させるために通常モードよりも大きな力を必要とするものの、ペダル2の回転速度を増加させたときに、車輪3の回転速度は、通常モードの場合よりも大きく増加する。
【0060】
したがって、自転車1においては、例えば、力の弱い人が自転車1に乗る場合などには、低速モードに切り替えてペダル2を回転させるのに必要な力を小さくし、力の強い人が自転車1に乗る場合などには、高速モードに切り替えて車輪3を高速で回転させやすくするといったことなどが可能となる。
【0061】
また、低速モードの場合には車輪3の回転速度が上記回転速度R2よりも速い回転速度R2’以上となったとき、高速モードの場合には、車輪3の回転速度が上記回転速度R2よりも遅い回転速度R2’’以上となったときに、それぞれ、図1(b)、図3、図5に示すように、アーム16が最大限反時計回りに揺動した状態となる。
【0062】
以上に説明した実施の形態によると、停止した状態の自転車1を発進させる場合や、登り坂にかかって車輪3の回転速度が遅い場合には、ペダル2を回転させるために比較的大きな力が必要となるが、車輪用プーリ6におけるベルト4が懸架される部分の径が最大となっているため、車輪用プーリ6におけるベルト4が懸架される部分の径に対するクランクプーリ5の径の比が小さくなる。これにより、クランクプーリ5(ペダル2)の回転量に対する車輪用プーリ6(車輪3)の回転量が小さくなるため、ペダル2を回転させるために必要な力が小さくなる。
【0063】
一方、車輪3の回転速度が速くなったときには、ベルト4の張力が大きくなることにより、車輪用プーリ6におけるベルト4が懸架される部分の径が小さくなり、車輪用プーリ6におけるベルト4が懸架される部分の径に対するクランクプーリ5の径の比が大きくなる。これにより、クランクプーリ5(ペダル2)の回転量に対する車輪用プーリ6(車輪3)の回転量が大きくなり、ペダル2の回転速度を増加させたときに、車輪3の回転速度を大きく増加させることが可能となる。すなわち、ペダル2を踏み込む速度が特に大きくなくても速く走ることができる。
【0064】
また、ベルト4が懸架されたテンションプーリ8と接続されたアーム16を揺動させることにより、ベルト4の張力を容易に変化させることができる。また、このとき、アーム16の支点16aがアイドラプーリ7の中心に位置しているので、自転車1の構成が簡単になる。
【0065】
また、車輪3の回転速度に応じて角度決定部22により決定された角度だけアーム16を揺動させることにより、容易に、車輪3の回転速度に応じてベルト4の張力を変化させることができる。
【0066】
また、自転車1においては、通常モード、低速モード及び高速モードの切り替えが可能であり、車輪3の各回転速度に対応するアーム16の揺動角度、つまり、車輪3の各回転速度に対応するベルト4の張力が、高速モード、標準モード及び低速モードの順に大きくなっている。
【0067】
このため、低速モードの場合には、通常モードと比較して、車輪用プーリ6のベルト4が懸架される部分の径に対するクランクプーリ5の径の比が小さくなり、クランクプーリ5(ペダル2)の回転量に対する、車輪用プーリ6(車輪3)の回転量が小さくなる。したがって、低速モードの場合には、ペダル2の回転速度を増加させても、車輪3の回転速度は、通常モードの場合ほど大きくは増加しないものの、ペダル2を回転させるのに必要な力は通常モードよりも小さくなる。
【0068】
一方、高速モードの場合には、通常モードと比較して、車輪用プーリ6のベルト4が懸架される部分の径に対するクランクプーリ5の径の比が大きくなり、クランクプーリ5(ペダル2)の回転量に対する、車輪用プーリ6(車輪3)の回転量が大きくなる。したがって、高速モードの場合には、ペダル2を回転させるために通常モードよりも大きな力を必要とするものの、ペダル2の回転速度を増加させたときに、車輪3の回転速度は、通常モードの場合よりも大きく増加する。
【0069】
したがって、自転車1においては、例えば、力の弱い人が自転車1に乗る場合などには、低速モードに切り替えてペダル2を回転させるのに必要な力を小さくし、力の強い人が自転車1に乗る場合などには、高速モードに切り替えて車輪3を高速で回転させやすくするといったことなどが可能となる。
【0070】
次に、本実施の形態に種々の変更を加えた変形例について説明する。ただし、本実施の形態と同様の構成を有する部分については同じ符号を付し、適宜その説明を省略する。
【0071】
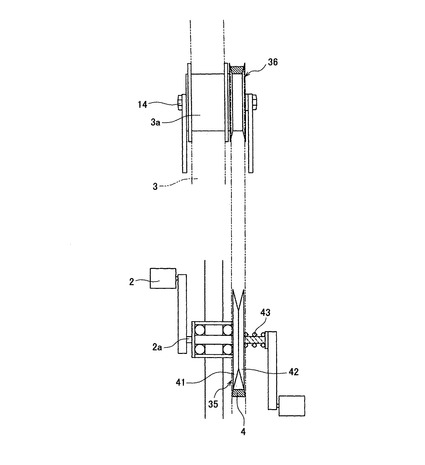
上述の実施の形態では、車輪用プーリ6が可変プーリとなっていたが、これには限られない。一変形例では、図7、図8に示すように、車輪用プーリ36は通常のプーリであり、クランクプーリ35が、2つのプーリ片41、42及びバネ43を有する可変プーリとなっている。
【0072】
プーリ片41、42及びバネ43は、それぞれ、プーリ片11、12及びバネ13(図2、図3参照)と同様の構成を有するものである。すなわち、2つのプーリ片41、42は、ペダル2の回転軸2aの延在方向(図7、図8の左右方向)に配列されることで互いに対向しており、ペダル2の回転軸2aと一体に回転可能となっている。また、プーリ片41、42は、互いの対向面に近い部分ほどその径が小さくなっており、ベルト4は、プーリ片41、42のこの部分に懸架される。プーリ片41は、回転軸2aに固定されており、プーリ片42は、回転軸2aの延在方向(図7、図8の左右方向)に移動可能となっている。つまり、プーリ片41とプーリ片42とは、回転軸2aの延在方向に相対移動可能となっている。バネ43はプーリ片42の右側に配置されており、プーリ片42をプーリ片41に向かって図7、図8の左方に付勢している。
【0073】
これにより、クランクプーリ35においては、ベルト4の張力が小さい場合には、バネ43の付勢力によりプーリ片42がプーリ片41に近づき(図7、図8の左方に移動し)、これより、ベルト4がクランクプーリ35の外周側に押し出され、クランクプーリ35におけるベルト4を懸架する部分の径が大きくなる。
【0074】
一方、ベルト4の張力が大きくなると、プーリ片42はベルト4に押されることにより、バネ43の付勢力に抗してプーリ片41から離れる(図7、図8の右方に移動する)。これにより、ベルト4は、クランクプーリ35の内周側に食い込む。すなわち、クランクプーリ35におけるベルト4が懸架される部分の径が小さくなる(変形例1)。
【0075】
この場合には、自転車1における変速動作は上述の実施の形態とは逆になる。すなわち、自転車1の停止時においては、図1(b)、図7に示すように、アーム16が最大限、図1の反時計回りに揺動した状態となっており、ベルト4の張力が最大限大きくなっている。これにより、図7に示すように、クランクプーリ35を構成するプーリ片42がバネ43の付勢力に抗して最大限プーリ片41から離れて位置しており、ベルト4は、最大限プーリ片41、42の内周側に食い込んでいる。すなわち、クランクプーリ35におけるベルト4が懸架される部分の径が最小となっている。
【0076】
停止した状態の自転車1を発進させる場合や、登り坂にかかって車輪3の回転速度が遅い場合などには、ペダル2を回転させるために比較的大きな力が必要となるが、クランクプーリ35におけるベルト4が懸架される部分の径が最小となっているため、車輪用プーリ36の径に対するクランクプーリ35におけるベルト4が懸架される部分の径の比が小さくなっている。これにより、ペダル2の回転量に対する車輪用プーリ6の回転量が小さくなるため、ペダル2を回転させるために必要な力が小さくなる。
【0077】
そして、車輪3の回転速度が所定の回転速度R1よりも遅いときには、この状態を保持し、車輪3の速度が所定の回転速度R1以上となったときに、車輪3の回転速度が速くなるほど、アーム16を大きく図1の時計回りに揺動させて図1(a)図8に示す状態に近づける。そして、アーム16を大きく図1の時計回りに揺動させるほど、ベルト4の張力が小さくなり、プーリ片42がバネ43の付勢力によりプーリ片41に近づく(図7、図8の左方に移動する)。これにより、ベルト4がプーリ片41、42により押し出され、クランクプーリ35におけるベルト4が懸架される部分の径が大きくなる。その結果、車輪用プーリ6の径に対するクランクプーリ5のベルト4が懸架される部分の径の比が大きくなる。
【0078】
そして、車輪用プーリ6の径に対するクランクプーリ5のベルト4が懸架される部分の径の比が大きくなると、クランクプーリ5(ペダル2)の回転量に対する車輪用プーリ6(車輪3)の回転量が大きくなり、ペダル2の回転速度を増加させたときに、車輪3の回転速度を大きく増加させることが可能となる。すなわち、ペダル2を踏み込む速度が特に大きくなくても速く走ることができる。
【0079】
一方、車輪3の回転速度が減少する場合には、上述したのとは逆となる。すなわち、車輪3の回転速度が上記回転速度R2以上のときには、図1(a)、図8に示すように、アーム16が最大限時計回りに揺動し、ベルト4の張力が最小(クランクプーリ35のベルト4が懸架される部分の径が最大)となっている。
【0080】
車輪3の回転速度が回転速度R2よりも遅くなると、車輪3の回転速度が遅くなるほどアーム16が図1の反時計回りに大きく揺動し、これにより、ベルト4の張力が大きくなる(クランクプーリ35のベルト4が懸架される部分の径が小さくなる)。そして、車輪3の回転速度が回転速度R1となったときに、アーム16が最大限反時計回りに揺動し、ベルト4の張力が最大(クランクプーリ35のベルト4が懸架される部分の径が最小)となる。また、車輪3の回転速度が回転速度R1よりも遅いときには、アーム16が最大限反対時計回りに揺動した状態に保持される。
【0081】
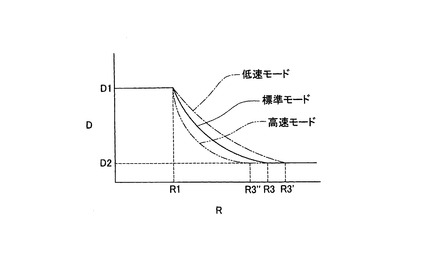
また、本実施の形態では、標準モード、低速モード及び高速モードにおいて、アーム16を揺動させ始める車輪3の回転速度を互いに異ならせることにより、同じ車輪3の回転速度に対して、アーム16の揺動角度を異ならせたが、これには限られない。別の一変形例では、図9に示すように、標準モード、低速モード及び高速モードのいずれの場合にも、車輪3の回転速度が上記回転速度R1となったときにアーム16を揺動させ始め、車輪3の回転速度の増加に対する車輪用プーリ6におけるベルト4が懸架される部分の径の減少の割合、すなわち、アーム16の揺動角度の増加の割合を、高速モード、標準モード及び低速モードの順に大きくしている(変形例2)。この場合でも、車輪3の各回転速度に対するアーム16の揺動角度、つまり、車輪3の各回転速度に対するベルト4の張力が、高速モード、標準モード及び低速モードの順で大きくなる。
【0082】
なお、この場合には、車輪3の回転速度が、標準モードの場合には所定の回転速度R3以上のとき、低速モードの場合には上記回転速度R3よりも速い所定の回転速度R3’以上のとき、高速モードの場合には上記回転速度R3よりも遅い所定の回転速度R3’’以上のときに、それぞれ、図1(b)、図3、図9に示すように、車輪用プーリ6におけるベルト4が懸架される部分の径が最小(D2)となる。
【0083】
また、上述の実施の形態では、図5に示すように、車輪3の回転速度の変化に合わせてアーム16の揺動角度を連続的に変化させることにより、車輪3の回転速度が速くなるほど、アーム16を大きく図1の反時計回りに揺動させたが、これには限られず、車輪3の回転速度の変化に合わせて、アーム16の揺動角度を段階的に変化させてもよい。
【0084】
また、上述の実施の形態では、アーム16の支点16aが、アイドラプーリ7の中心に位置していたが、アーム16の支点16aが他の位置にあってもよい。
【0085】
また、上述の実施の形態では、モータ23がステッピングモータであったが、これには限られず、例えば、モータ23がサーボモータであり、揺動ユニット20に別途、アーム16の揺動角度を検出するセンサが設けられていてもよい。この場合には、モータ23が、このセンサにより検出されたアーム16の揺動角度を参照しながら、アーム16を角度決定部22において決定された角度だけ揺動させればよい。
【0086】
また、上述の実施の形態では、ベルト4が懸架されたテンションプーリ8と接続されたアーム16を揺動させることにより、ベルト4の張力を変化させたが、これには限られず、別の方法によりベルト4の張力を変化させてもよい。
【0087】
また、上述の実施の形態では、2つプーリ片11、12の一方であるプーリ片11が回転軸3aに固定されているとともに、他方であるプーリ片12が移動可能に構成されており、プーリ片12がバネ13によりプーリ片11に向かって付勢されていたが、これには限られず、プーリ片11、12の両方が車輪3の回転軸3aの延在方向に個別に移動可能(プーリ片11とプーリ片12とが相対移動可能)に構成されており、プーリ片11、12に対してそれぞれバネ13が設けられており、バネ13により、プーリ片11、12が互いに近づく方向に付勢されていてもよい、すなわち、プーリ片11がプーリ片12に向かって(図2、図3の右方に)付勢されているとともに、プーリ片12がプーリ片11に向かって(図2、図3の左方に)付勢されていてもよい。
【0088】
また、本実施の形態では、自転車1を、標準モード、低速モード及び高速モードの3つのモードで動作させることができるように構成されていたが、これには限られず、自転車1を、車輪3の各回転速度に対応するアーム16の揺動角度が互いに異なる、2つあるいは4つ以上のモードで動作させることができるように構成されていてもよい。あるいは、自転車1において、モードを選択することができるようになっておらず、標準モードでのみ動作させることができるように構成されていなくてもよい。
【0089】
また、以上の説明では、ベルト4がVベルトであり、可変プーリが、2つのプーリ片及びバネを有する構成となっていたが、これには限られず、例えば、ベルト4の張力が大きくなるほど、可変プーリの径が小さくなるように変形するなど、ベルト4の張力が大きさに応じてベルト4の可変プーリに懸架される部分の径が変化するように構成されていれば、ベルト4及び可変プーリの構成は上述したのとは異なっていてもよい。
【符号の説明】
【0090】
1 自転車
2 ペダル
2a 回転軸
3 車輪
3a 回転軸
4 ベルト
5 クランクプーリ
6 車輪用プーリ
7 アイドラプーリ
8 テンションプーリ
11、12 プーリ片
13 バネ
16 アーム
16a 支点
19 回転速度センサ
20 揺動制御装置
21 モード決定部
22 角度決定部
23 モータ
35 クランクプーリ
36 車輪用プーリ
41、42 プーリ片
43 バネ
【技術分野】
【0001】
本発明は、自転車の車輪の回転速度に応じて自動的に変速を行う自動変速装置に関する。
【背景技術】
【0002】
特許文献1に記載の自転車用無段変速装置においては、ハンドルを操作すると、変速用ベルト及び変速用ベルトを介してハンドルに接続された変速用ナットが回転し、変速用ナットが移動する。これに伴って、変速用ナットに隣接して配置された、ペダルをこぐと回転する可変プーリを構成する2つのプーリ片の一方である可動プーリ片が移動して、2つのプーリ片の間の距離が変化し、2つのプーリ片の距離に応じて、可変プーリのVベルトが懸架される部分の径が変化する。そして、可変プーリのVベルトが懸架される部分の径が大きくなると、車輪用のプーリの径に対する可変プーリの径の比が大きくなるため、可変プーリの回転量に対する車輪用プーリの回転量が大きくなり、ペダルの回転速度を増加させたときに、車輪の回転速度を大きく増加させることができる。一方、可変プーリのVベルトが懸架される部分の径が小さくなると、車輪用のプーリの径に対する可変プーリの径の比が小さくなるため、可変プーリの回転量に対する車輪用プーリの回転量が小さくなり、ペダルを回転させるのに必要な力が小さくなる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−183995号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載の自転車用無段変速装置では、自転車に乗っている人が、自転車の運転中に自身で判断してハンドルを操作することにより変速を行う必要がある。このため、変速操作に慣れていない人が変速操作を行った場合には、適切に変速を行うことができず、ペダルを回転させるために大きな力を必要とする、あるいは、車輪を高速に回転させることができない虞がある。また、ハンドルによる変速操作に気を取られるなどした場合には、安全上問題が生じる虞がある。
【0005】
本発明の目的は、自転車の車輪の回転速度に応じて自動的に変速させることが可能な自動変速装置を提供することである。
【課題を解決するための手段】
【0006】
第1の発明に係る自動変速装置は、自転車に用いられる自動変速装置であって、前記自転車のペダルの回転軸とともに回転するクランクプーリと、前記自転車の車輪の回転軸とともに回転する車輪用プーリと、前記クランクプーリ及び前記車輪用プーリに懸架された無端状のベルトと、前記ベルトの張力を変化させる張力変更手段と、前記車輪の回転速度を検出する回転速度検出手段とを備えており、前記クランクプーリ及び前記車輪用プーリの一方が、前記ベルトの張力が大きくなるほどその前記ベルトが懸架される部分の径が小さくなる可変プーリにより構成されており、前記張力変更手段は、前記回転速度検出手段により検出された前記車輪の回転速度に応じて前記ベルトの張力を変化させることを特徴とするものである。
【0007】
これによると、ベルトの張力が小さい場合には、可変プーリにおけるベルトが懸架される部分の径が大きくなり、ベルトの張力が大きい場合には、可変プーリにおけるベルトが懸架される部分の径が小さくなる。したがって、回転速度検出手段により検出した車輪の回転速度に応じて、張力変更手段によりベルトの張力を変化させることにより、可変プーリにおけるベルトが懸架される部分の径を自動的に変化させて変速を行うことが可能となる。
【0008】
第2の発明に係る自動変速装置は、第1の発明に係る自動変速装置であって、前記ベルトがその内周側ほど幅が小さくなったVベルトであって、前記可変プーリが、前記ペダルの回転軸の延在方向に配列されることによって互いに対向しており、前記ペダルの回転軸と一体的に回転するとともに、前記ペダルの回転軸の延在方向に相対移動可能に構成された2つのプーリ片と、前記2つのプーリ片の少なくとも一方を、前記2つのプーリ片が互いに近づく方向に付勢する付勢手段とを備えており、前記2つのプーリ片は、前記ベルトが懸架される部分の径が、互いの対向面に近い部分ほど小さくなっていることを特徴とするものである。
【0009】
これによると、ベルトの張力が大きい場合には、2つのプーリ片が付勢手段の付勢力に抗して互いに離れる方向に移動するため、ベルトが2つのプーリ片の径が小さい部分に懸架されることになり、ベルトの張力が小さい場合には、2つのプーリ片が付勢手段の付勢力により互いに近づく方向に移動するため、ベルトが2つプーリ片の径が大きい部分に懸架されることになる。したがって、2つのプーリ片と付勢手段とにより、ベルトの張力が大きくなるほど、ベルトが懸架される部分における径が小さくなるような可変プーリを容易に形成することができる。
【0010】
第3の発明に係る自動変速装置は、第1又は第2の発明に係る自動変速装置であって、前記車輪用プーリが前記可変プーリによって構成されており、前記張力変更手段は、前記回転速度検出手段により検出された前記車輪の回転速度が速いほど、前記ベルトの張力が大きくなるように、前記ベルトの張力を変化させることを特徴とするものである。
【0011】
これによると、車輪の回転速度が遅い場合には、ベルトの張力が小さくなることにより、可変プーリである車輪用プーリにおけるベルトが懸架される部分の径が大きくなり、車輪用プーリにおけるベルトが懸架される部分の径に対するクランクプーリの径の比が小さくなる。これにより、クランクプーリの回転量に対する車輪用プーリの回転量が小さくなり、ペダルを回転させるのに必要な力が小さくなる。
【0012】
一方、車輪の回転速度が速い場合には、ベルトの張力が大きくなることにより、可変プーリである車輪用プーリにおけるベルトが懸架された部分の径が小さくなり、車輪用プーリにおけるベルトが懸架される部分の径に対するクランクプーリの径の比が大きくなる。これにより、クランクプーリの回転量に対する車輪用プーリの回転量が大きくなり、ペダルの回転速度を増加させたときに、車輪用プーリの回転速度を大きく増加させることができる。
【0013】
第4の発明に係る自動変速装置は、第1又は第2の発明に係る自動変速装置であって、前記クランクプーリが前記可変プーリによって構成されており、前記張力変更手段は、前記回転速度検出手段により検出された前記車輪の回転速度が速いほど、前記ベルトの張力が小さくなるように、前記ベルトの張力を変化させることを特徴とするものである。
【0014】
これによると、車輪の回転速度が遅い場合には、ベルトの張力が大きくなることにより、可変プーリであるクランクプーリにおけるベルトが懸架される部分の径が小さくなり、車輪用プーリの径に対するクランクプーリにおけるベルトが懸架される部分の径の比が小さくなる。これにより、クランクプーリの回転量に対する車輪用プーリの回転量が小さくなり、ペダルを回転させるのに必要な力が小さくなる。
【0015】
一方、車輪の回転速度が速い場合には、ベルトの張力が小さくなることで、可変プーリであるクランクプーリにおけるベルトが懸架される部分の径が大きくなり、車輪用プーリの径に対するクランクプーリにおけるベルトが懸架される部分の径の比が大きくなる。これにより、クランクプーリの回転量に対する車輪用プーリの回転量が大きくなり、ペダルの回転速度を増加させたときに、車輪用プーリの回転速度を大きく増加させることができる。
【0016】
第5の発明に係る自動変速装置は、第1〜第4のいずれかの発明に係る自動変速装置であって、前記張力変更手段が、所定の支点を中心として揺動可能に構成されたアームと、前記アームに接続されており、前記ベルトが懸架されるテンションプーリと、前記アームを揺動させるモータとを有していることを特徴とするものである。
【0017】
これによると、ベルトが懸架されたテンションプーリと接続されたアームを揺動させることにより、容易にベルトの張力を変化させることができる。
【0018】
第6の発明に係る自動変速装置は、第5の発明に係る自動変速装置であって、前記車輪用プーリに固定されているとともに、前記ベルトが懸架されるアイドラプーリをさらに備えており、前記アームが、前記アイドラプーリの中心を支点として揺動可能に構成されていることを特徴とするものである。
【0019】
これによると、アームの支点がアイドラプーリの中心に位置しているので、自転車の構成が簡単になる。
【0020】
第7の発明に係る自動変速装置は、第5又は第6の発明に係る自動変速装置であって、前記張力変更手段が、前記アームの揺動角度を決定する角度決定手段とをさらに備えており、前記角度決定手段は、前記回転速度検出手段により検出された前記車輪の回転速度に応じて、前記アームの揺動角度を決定し、前記モータは、前記角度決定手段により決定された角度だけ、前記アームを揺動させることを特徴とするものである。
【0021】
これによると、アームを、車輪の回転速度に応じて決定された角度だけ揺動させることにより、容易に、車輪の回転速度に応じてベルトの張力を変化させることができる。
【0022】
第8の発明に係る自動変速装置は、第5〜第7のいずれかの発明に係る自動変速装置であって、前記車輪の回転速度に対応する前記アームの揺動角度が互いに異なる複数のモードで動作可能であり、前記張力変更手段が、前記複数のモードのうち、いずれのモードで動作させるかを決定するモード決定手段をさらに備えており、前記角度決定手段は、前記回転速度検出手段により検出された前記車輪の回転速度と、前記モード決定手段により決定されたモードとに応じて、前記アームの揺動角度を決定することを特徴とするものである。
【0023】
これによると、車輪の回転速度に対応するアームの揺動角度、つまり、車輪の回転速度に対応するベルトの張力が互いに異なる複数のモードで動作することができるようにすることにより、例えば、力の強い人が自転車に乗る場合などに適した、ペダルを回転させるのに必要な力は大きくなるものの、ペダルの回転速度を増加させたときには、車輪の回転速度が特に大きく増加するような変速と、これとは逆に、力の弱い人が自転車に乗る場合などに適した、ペダルの回転速度を増加させたときに、車輪回転速度はそれほど大きく増加しないものの、ペダルを回転させるのに必要な力が小さくてすむような変速とを切り替えることなどが可能となる。
【発明の効果】
【0024】
本発明によれば、ベルトの張力が小さい場合には、可変プーリにおけるベルトが懸架される部分における径が大きくなり、ベルトの張力が大きい場合には、可変プーリにおけるベルトが懸架される部分の径が小さくなる。したがって、回転速度検出手段により検出した車輪の回転速度に応じて、張力変更手段によりベルトの張力を変化させることにより、可変プーリにおけるベルトが懸架される部分の径を自動的に変化させて変速を行うことが可能となる。
【図面の簡単な説明】
【0025】
【図1】本発明における実施の形態に係る自転車の概略構成図であり、(a)が、アームが最大限時計回りに揺動した状態、(b)が、アームが最大限反時計回りに揺動した状態をそれぞれ示している。
【図2】図1(a)を矢印IIの方向から見た図である。
【図3】図1(b)を矢印IIIの方向から見た図である。
【図4】アームを揺動させる揺動制御装置のブロック図である。
【図5】車輪の回転速度と、車輪用プーリにおけるベルトが懸架される部分の径との関係を示す図である。
【図6】ペダルの回転速度と、車輪の回転速度との関係を示す図である。
【図7】変形例1の図3相当の図である。
【図8】変形例1の図2相当の図である。
【図9】変形例2の図5相当の図である。
【発明を実施するための形態】
【0026】
以下、本発明の好適な実施の形態について説明する。
【0027】
図1は、本実施の形態に係る自転車の一部を示す概略構成図であり、(a)が、後述するアーム16が最大限時計回りに揺動した状態、(b)が、アーム16が最大限反時計回りに揺動した状態をそれぞれ示している。図2は図1(a)を矢印IIの方向から見た図である。図3は図1(b)を矢印IIIの方向から見た図である。ただし、図面を分かりやすくするため、図2、図3においては、後述する、アイドラプーリ7、テンションプーリ8、アーム16などの図示を省略している。
【0028】
図1〜図3に示すように、自転車1は、ペダル2及び車輪3と、ペダル2の回転を車輪3に伝達するためのベルト4、クランクプーリ5、車輪用プーリ6、アイドラプーリ7及びテンションプーリ8とを有している。ペダル2及び車輪3の構成は、従来の自転車のものと同様であるので、ここではその詳細な説明は省略する。なお、車輪3の回転速度は、後述する回転速度センサ19(図4参照)により検出される。
【0029】
ベルト4は、クランクプーリ5、車輪用プーリ6、アイドラプーリ7及びテンションプーリ8に懸架された無端状のベルトであり、図2、図3に示すように、内周側の部分ほどその幅が狭くなった略台形の断面形状を有するいわゆるVベルトである。
【0030】
クランクプーリ5は、ペダル2の回転軸2aと接続されており、ペダル2を回転させると、回転軸2aとともにクランクプーリ5が回転する。
【0031】
車輪用プーリ6は、車輪の回転軸3aにボルト14により固定されており、車輪用プーリ6が回転することにより車輪3が回転する。また、車輪用プーリ6は、いわゆる可変プーリであって、2つのプーリ片11、12及びバネ13を有している。
【0032】
2つのプーリ片11、12は、回転軸3aの延在方向(図2、図3の左右方向)に配列されることで互いに対向しており、回転軸3aと一体に回転する。また、プーリ片11、12は、互いの対向面に近い部分ほどその径が小さくなっている。つまり、プーリ片11は図2、図3の右側の部分ほどその径が小さくなっており、プーリ片12は、図2、図3の左側の部分ほどその径が小さくなっている。そして、ベルト4は、プーリ片11、12のこの径が変化している部分に懸架される。
【0033】
プーリ片11は、車輪3の回転軸3aに固定されており、プーリ片12は、回転軸3aの延在方向(図2、図3の左右方向)に移動可能となっている。すなわち、プーリ片11とプーリ片12とは、回転軸3aの延在方向に相対移動可能となっている。ただし、プーリ12は回転軸3aの回転方向に対する周り止めを有しており、回転軸3aが回転したときにのみ回転する。バネ13は図2、図3におけるプーリ片12の右側に配置されており、プーリ片12をプーリ片11に向かって図2、図3の左方に(プーリ片11とプーリ片12とが互いに近づく方向に)付勢している。
【0034】
これにより、車輪用プーリ6においては、後述するようにベルト4の張力が小さい場合には、バネ13の付勢力によりプーリ片12がプーリ片11に近づき(図2、図3の左方に移動し)、これより、ベルト4がクランクプーリ5の外周側に押し出され、車輪用プーリ6におけるベルト4が懸架される部分の径が大きくなる。
【0035】
一方、ベルト4の張力が大きくなると、プーリ片12はベルト4によりその内周側に押され、これにより、バネ13の付勢力に抗してプーリ片11から離れる(図2、図3の右方に移動する)。これにより、ベルト4が車輪用プーリ6の内周側に食い込み、車輪用プーリ6におけるベルト4が懸架される部分の径が小さくなる。
【0036】
アイドラプーリ7は、自転車1本体に固定された連結部材15のベアリングを介して回転自在になっている。テンションプーリ8は、アーム16により、アイドラプーリ7と連結されている。
【0037】
アーム16は、アイドラプーリ7の中心に位置する支点16aを中心として、図1(a)に示す位置と図1(b)に示す位置との間で揺動可能となっている。そして、アーム16が揺動するのに連動して、アーム16に連結されたテンションプーリ8も支点16aを中心として揺動する。
【0038】
そして、アーム16が図1の反時計回りに揺動して図1(b)に示す位置に近づくほど、ベルト4が、テンションプーリ8によりその外周側に大きく押し広げられ、その結果、ベルト4の張力が大きくなる。
【0039】
このように、本実施の形態では、ベルト4が懸架されたテンションプーリ8と接続されたアーム16を揺動させることにより、ベルト4の張力を容易に変化させることができる。また、アーム16の支点16aがアイドラプーリ7の中心に位置しているので、自転車1の構成が簡単になる。
【0040】
次に、アーム16を揺動させる揺動ユニットについて説明する。図4は、アーム16を揺動させる揺動ユニット20のブロック図である。揺動ユニット20は、モード決定部21、角度決定部22、モータ23などを有している。なお、本実施の形態においては、テンションプーリ8、アーム16及び揺動ユニット20をあわせたものが、本発明に係る張力変更手段に相当する。
【0041】
ここで、自転車1においては、所定の通常モードのほか、後述するように、力の弱い人が自転車1に乗る場合などに適した、ペダル2の回転速度を増加させても、車輪3の回転速度は通常モードの場合ほど大きくは増加しないものの、ペダル2を回転させるのに必要な力が通常モードよりも小さいモード(以下、低速モードとする)、及び、力の強い人が自転車1に乗る場合などに適した、ペダル2を回転させるのに必要な力は通常モードよりも大きくなってしまうものの、ペダル2の回転速度を増加させたときに、車輪3の回転速度を通常モードよりも大きく増加させることができるモード(高速モード)のいずれかのモードに切り替えることできるようになっている。
【0042】
また、上記標準モード、低速モード及び高速モードは、自転車1に乗る人が自転車1に設けられたスイッチ18を操作することにより選択される。モード決定部21は、スイッチ18による操作を受けて、通常モード、低速モード及び高速モードのいずれのモードで動作させるかを決定する。
【0043】
角度決定部22は、モード決定部21により決定されたモード、及び、回転速度センサ19より検出された車輪3の回転速度に応じて、図1(a)に示す位置からのアーム16の反時計回りの揺動角度を決定する。より詳細には、回転速度センサ19により検出された車輪の回転速度が速いほど、アーム16が図1(a)に示す位置から揺動角度が大きくなるように揺動角度を決定する。また、車輪3の各回転速度に対応する揺動角度は、高速モード、標準モード、及び、低速モードの順に揺動角度が大きくなる(互いに異なる)ようにする。
【0044】
モータ23は、例えばステッピングモータなどである。モータ23は、アーム16の支点16aに接続されており、角度決定部22により決定された揺動角度だけアーム16を揺動させる。
【0045】
これにより、アーム16の揺動に連動して、テンションプーリ8が、角度決定部22により決定された角度だけ揺動し、その結果、ベルト4の張力が変化する。そして、このように、アーム16を、車輪3の回転速度に応じて角度決定部22において決定された角度だけ揺動させることにより、容易に、車輪3の回転速度に応じてベルト4の張力を変化させることができる。
【0046】
次に、自転車1における変速動作について説明する。図5は、車輪3の回転速度R(自転車1の走行速度)と車輪用プーリ6におけるベルト4が懸架される部分の径Dとの関係を示す図である。図6は、ペダル2の回転速度Pと車輪3の回転速度Rとの関係を示す図である。
【0047】
自転車1は、停止時においては、図1(a)、図2に示すように、アーム16が最大限、図1の時計回りに揺動した状態となっており、ベルト4の張力が最小となっている。これにより、図2に示すように、車輪用プーリ6を構成するプーリ片12が、バネ13の付勢力によりプーリ片11に当接している、つまり、最大限プーリ片11に近接している。したがって、ベルト4が、車輪用プーリ6の外周側に最大限押し出された状態となり、車輪用プーリ6におけるベルト4が懸架される部分の径が最大(D1)となっている。
【0048】
停止した状態の自転車1を発進させる場合や、登り坂にかかって車輪3の回転速度が遅い場合などには、ペダル2を回転させるために比較的大きな力が必要となるが、車輪用プーリ6におけるベルト4が懸架される部分の径が最大(D1)となっているため、車輪用プーリ6におけるベルト4が懸架される部分の径に対するクランクプーリ5の径の比が小さくなる。これにより、クランクプーリ5(ペダル2)の回転量に対する車輪用プーリ6(車輪3)の回転量が小さくなり、その結果、ペダル2を回転させるために必要な力が小さくなる。
【0049】
ただし、この状態では、クランクプーリ5(ペダル2)の回転量に対する車輪用プーリ6(車輪3)の回転量が小さいため、図6に示すように、ペダル2の回転速度を上げても、車輪3の回転速度はそれほど大きくは増加しない。
【0050】
そして、標準モードの場合には、車輪3の回転速度が所定の回転速度R1よりも遅いときには、この状態を保持し、車輪3の回転速度が回転速度R1以上となったときに、車輪3の速度増加に合わせてアーム16を連続的に揺動させることにより、図5に示すように、車輪3の回転速度が速くなるほど、アーム16を大きく図1の反時計回りに揺動させる。つまり、図1(a)に示す状態から図1(b)に示す状態(図2に示す状態から図3に示す状態)に近づけていく。
【0051】
ここで、アーム16を大きく図1の反時計回りに揺動させるほど、ベルト4がその外周側に広げられて、ベルト4の張力が大きくなる。そして、ベルト4の張力が大きくなると、プーリ片12がバネ13の付勢力に抗してプーリ片11から離れる(図2、図3の右方に移動する)。これにより、ベルト4が車輪用プーリ6の内周側に食い込み、車輪用プーリ6におけるベルト4が懸架される部分の径が小さくなる。その結果、車輪用プーリ6におけるベルト4が懸架される部分の径に対するクランクプーリ5の径の比が大きくなる。
【0052】
そして、標準モードの場合には、車輪3の回転速度が所定の回転速度R2となったときに、図1(b)、図3に示すように、アーム16が最大限反時計回りに揺動した状態となり、車輪3の回転速度が回転速度R2以上であるときにはこの状態に保持される。このとき、車輪用プーリ6におけるベルト4が懸架される部分の径が最小(D2)となっている。
【0053】
そして、車輪用プーリ6におけるベルト4が懸架される部分の径に対するクランクプーリ5の径の比が大きくなると、クランクプーリ5(ペダル2)の回転量に対する車輪用プーリ6(車輪3)の回転量が大きくなり、図6に示すように、車輪3の回転速度が上記回転速度R1以上の場合には、車輪3の回転速度が回転速度R1よりも遅いときと比較して、ペダル2の回転速度を増加させたときに、車輪3の回転速度を大きく増加させることが可能となる。すなわち、ペダル2を踏み込む速度が特に大きくなくても速く走ることができる。
【0054】
また、車輪3の回転速度が上記回転速度R2以上である場合には、それ以上アーム16が揺動しないため、図6に示すように、ペダル2の回転速度を増加に対する車輪3の回転速度の増加の割合が、車輪3の回転速度が上記回転速度R1と上記回転速度R2の間である場合よりも小さくなる。
【0055】
一方、車輪3の回転速度が減少する場合には、上述したのとは逆となる。すなわち、車輪3の回転速度が上記回転速度R2以上のときには、図1(b)、図3に示すように、アーム16が最大限反時計回りに揺動し、ベルト4の張力が最大(車輪用プーリ6のベルト4が懸架される部分の径が最小(D2))となっている。
【0056】
車輪3の回転速度が回転速度R2よりも遅くなると、車輪3の回転速度が遅くなるほどアーム16が図1の時計回りに揺動し、これにより、ベルト4の張力が小さくなる(車輪用プーリ6のベルト4が懸架される部分の径が大きくなる)。そして、車輪3の回転速度が回転速度R1となったときに、アーム16が最大限時計回りに揺動し、ベルト4の張力が最小(車輪用プーリ6のベルト4が懸架される部分の径が最大(D1))となる。また、車輪3の回転速度が回転速度R1よりも遅いときには、アーム16が最大限時計回りに揺動した状態に保持される。
【0057】
なお、低速モードの場合には車輪3の回転速度が上記回転速度R1よりも速い回転速度R1’となったとき、高速モードの場合には車輪3の回転速度が上記回転速度R1よりも遅い回転速度R1’’となったときに、それぞれ、図5に示すようにアーム16を揺動させ始める(車輪用プーリ6におけるベルト4が懸架される部分の径を減少させ始める)。これにより、車輪3の各回転速度に対応するアーム16の揺動角度、つまり、車輪3の各回転速度に対応するベルト4の張力が、高速モード、標準モード及び低速モードの順に大きくなる。
【0058】
これにより、低速モードの場合には、通常モードと比較して、車輪用プーリ6のベルト4が懸架される部分の径に対するクランクプーリ5の径の比が小さくなり、クランクプーリ5(ペダル2)の回転量に対する、車輪用プーリ6(車輪3)の回転量が小さくなる。したがって、低速モードの場合には、ペダル2の回転速度を増加させても、車輪3の回転速度は、通常モードの場合ほど大きくは増加しないものの、ペダル2を回転させるのに必要な力は通常モードよりも小さくなる。
【0059】
一方、高速モードの場合には、通常モードと比較して、車輪用プーリ6のベルト4が懸架される部分の径に対するクランクプーリ5の径の比が大きくなり、クランクプーリ5(ペダル2)の回転量に対する、車輪用プーリ6(車輪3)の回転量が大きくなる。したがって、高速モードの場合には、ペダル2を回転させるために通常モードよりも大きな力を必要とするものの、ペダル2の回転速度を増加させたときに、車輪3の回転速度は、通常モードの場合よりも大きく増加する。
【0060】
したがって、自転車1においては、例えば、力の弱い人が自転車1に乗る場合などには、低速モードに切り替えてペダル2を回転させるのに必要な力を小さくし、力の強い人が自転車1に乗る場合などには、高速モードに切り替えて車輪3を高速で回転させやすくするといったことなどが可能となる。
【0061】
また、低速モードの場合には車輪3の回転速度が上記回転速度R2よりも速い回転速度R2’以上となったとき、高速モードの場合には、車輪3の回転速度が上記回転速度R2よりも遅い回転速度R2’’以上となったときに、それぞれ、図1(b)、図3、図5に示すように、アーム16が最大限反時計回りに揺動した状態となる。
【0062】
以上に説明した実施の形態によると、停止した状態の自転車1を発進させる場合や、登り坂にかかって車輪3の回転速度が遅い場合には、ペダル2を回転させるために比較的大きな力が必要となるが、車輪用プーリ6におけるベルト4が懸架される部分の径が最大となっているため、車輪用プーリ6におけるベルト4が懸架される部分の径に対するクランクプーリ5の径の比が小さくなる。これにより、クランクプーリ5(ペダル2)の回転量に対する車輪用プーリ6(車輪3)の回転量が小さくなるため、ペダル2を回転させるために必要な力が小さくなる。
【0063】
一方、車輪3の回転速度が速くなったときには、ベルト4の張力が大きくなることにより、車輪用プーリ6におけるベルト4が懸架される部分の径が小さくなり、車輪用プーリ6におけるベルト4が懸架される部分の径に対するクランクプーリ5の径の比が大きくなる。これにより、クランクプーリ5(ペダル2)の回転量に対する車輪用プーリ6(車輪3)の回転量が大きくなり、ペダル2の回転速度を増加させたときに、車輪3の回転速度を大きく増加させることが可能となる。すなわち、ペダル2を踏み込む速度が特に大きくなくても速く走ることができる。
【0064】
また、ベルト4が懸架されたテンションプーリ8と接続されたアーム16を揺動させることにより、ベルト4の張力を容易に変化させることができる。また、このとき、アーム16の支点16aがアイドラプーリ7の中心に位置しているので、自転車1の構成が簡単になる。
【0065】
また、車輪3の回転速度に応じて角度決定部22により決定された角度だけアーム16を揺動させることにより、容易に、車輪3の回転速度に応じてベルト4の張力を変化させることができる。
【0066】
また、自転車1においては、通常モード、低速モード及び高速モードの切り替えが可能であり、車輪3の各回転速度に対応するアーム16の揺動角度、つまり、車輪3の各回転速度に対応するベルト4の張力が、高速モード、標準モード及び低速モードの順に大きくなっている。
【0067】
このため、低速モードの場合には、通常モードと比較して、車輪用プーリ6のベルト4が懸架される部分の径に対するクランクプーリ5の径の比が小さくなり、クランクプーリ5(ペダル2)の回転量に対する、車輪用プーリ6(車輪3)の回転量が小さくなる。したがって、低速モードの場合には、ペダル2の回転速度を増加させても、車輪3の回転速度は、通常モードの場合ほど大きくは増加しないものの、ペダル2を回転させるのに必要な力は通常モードよりも小さくなる。
【0068】
一方、高速モードの場合には、通常モードと比較して、車輪用プーリ6のベルト4が懸架される部分の径に対するクランクプーリ5の径の比が大きくなり、クランクプーリ5(ペダル2)の回転量に対する、車輪用プーリ6(車輪3)の回転量が大きくなる。したがって、高速モードの場合には、ペダル2を回転させるために通常モードよりも大きな力を必要とするものの、ペダル2の回転速度を増加させたときに、車輪3の回転速度は、通常モードの場合よりも大きく増加する。
【0069】
したがって、自転車1においては、例えば、力の弱い人が自転車1に乗る場合などには、低速モードに切り替えてペダル2を回転させるのに必要な力を小さくし、力の強い人が自転車1に乗る場合などには、高速モードに切り替えて車輪3を高速で回転させやすくするといったことなどが可能となる。
【0070】
次に、本実施の形態に種々の変更を加えた変形例について説明する。ただし、本実施の形態と同様の構成を有する部分については同じ符号を付し、適宜その説明を省略する。
【0071】
上述の実施の形態では、車輪用プーリ6が可変プーリとなっていたが、これには限られない。一変形例では、図7、図8に示すように、車輪用プーリ36は通常のプーリであり、クランクプーリ35が、2つのプーリ片41、42及びバネ43を有する可変プーリとなっている。
【0072】
プーリ片41、42及びバネ43は、それぞれ、プーリ片11、12及びバネ13(図2、図3参照)と同様の構成を有するものである。すなわち、2つのプーリ片41、42は、ペダル2の回転軸2aの延在方向(図7、図8の左右方向)に配列されることで互いに対向しており、ペダル2の回転軸2aと一体に回転可能となっている。また、プーリ片41、42は、互いの対向面に近い部分ほどその径が小さくなっており、ベルト4は、プーリ片41、42のこの部分に懸架される。プーリ片41は、回転軸2aに固定されており、プーリ片42は、回転軸2aの延在方向(図7、図8の左右方向)に移動可能となっている。つまり、プーリ片41とプーリ片42とは、回転軸2aの延在方向に相対移動可能となっている。バネ43はプーリ片42の右側に配置されており、プーリ片42をプーリ片41に向かって図7、図8の左方に付勢している。
【0073】
これにより、クランクプーリ35においては、ベルト4の張力が小さい場合には、バネ43の付勢力によりプーリ片42がプーリ片41に近づき(図7、図8の左方に移動し)、これより、ベルト4がクランクプーリ35の外周側に押し出され、クランクプーリ35におけるベルト4を懸架する部分の径が大きくなる。
【0074】
一方、ベルト4の張力が大きくなると、プーリ片42はベルト4に押されることにより、バネ43の付勢力に抗してプーリ片41から離れる(図7、図8の右方に移動する)。これにより、ベルト4は、クランクプーリ35の内周側に食い込む。すなわち、クランクプーリ35におけるベルト4が懸架される部分の径が小さくなる(変形例1)。
【0075】
この場合には、自転車1における変速動作は上述の実施の形態とは逆になる。すなわち、自転車1の停止時においては、図1(b)、図7に示すように、アーム16が最大限、図1の反時計回りに揺動した状態となっており、ベルト4の張力が最大限大きくなっている。これにより、図7に示すように、クランクプーリ35を構成するプーリ片42がバネ43の付勢力に抗して最大限プーリ片41から離れて位置しており、ベルト4は、最大限プーリ片41、42の内周側に食い込んでいる。すなわち、クランクプーリ35におけるベルト4が懸架される部分の径が最小となっている。
【0076】
停止した状態の自転車1を発進させる場合や、登り坂にかかって車輪3の回転速度が遅い場合などには、ペダル2を回転させるために比較的大きな力が必要となるが、クランクプーリ35におけるベルト4が懸架される部分の径が最小となっているため、車輪用プーリ36の径に対するクランクプーリ35におけるベルト4が懸架される部分の径の比が小さくなっている。これにより、ペダル2の回転量に対する車輪用プーリ6の回転量が小さくなるため、ペダル2を回転させるために必要な力が小さくなる。
【0077】
そして、車輪3の回転速度が所定の回転速度R1よりも遅いときには、この状態を保持し、車輪3の速度が所定の回転速度R1以上となったときに、車輪3の回転速度が速くなるほど、アーム16を大きく図1の時計回りに揺動させて図1(a)図8に示す状態に近づける。そして、アーム16を大きく図1の時計回りに揺動させるほど、ベルト4の張力が小さくなり、プーリ片42がバネ43の付勢力によりプーリ片41に近づく(図7、図8の左方に移動する)。これにより、ベルト4がプーリ片41、42により押し出され、クランクプーリ35におけるベルト4が懸架される部分の径が大きくなる。その結果、車輪用プーリ6の径に対するクランクプーリ5のベルト4が懸架される部分の径の比が大きくなる。
【0078】
そして、車輪用プーリ6の径に対するクランクプーリ5のベルト4が懸架される部分の径の比が大きくなると、クランクプーリ5(ペダル2)の回転量に対する車輪用プーリ6(車輪3)の回転量が大きくなり、ペダル2の回転速度を増加させたときに、車輪3の回転速度を大きく増加させることが可能となる。すなわち、ペダル2を踏み込む速度が特に大きくなくても速く走ることができる。
【0079】
一方、車輪3の回転速度が減少する場合には、上述したのとは逆となる。すなわち、車輪3の回転速度が上記回転速度R2以上のときには、図1(a)、図8に示すように、アーム16が最大限時計回りに揺動し、ベルト4の張力が最小(クランクプーリ35のベルト4が懸架される部分の径が最大)となっている。
【0080】
車輪3の回転速度が回転速度R2よりも遅くなると、車輪3の回転速度が遅くなるほどアーム16が図1の反時計回りに大きく揺動し、これにより、ベルト4の張力が大きくなる(クランクプーリ35のベルト4が懸架される部分の径が小さくなる)。そして、車輪3の回転速度が回転速度R1となったときに、アーム16が最大限反時計回りに揺動し、ベルト4の張力が最大(クランクプーリ35のベルト4が懸架される部分の径が最小)となる。また、車輪3の回転速度が回転速度R1よりも遅いときには、アーム16が最大限反対時計回りに揺動した状態に保持される。
【0081】
また、本実施の形態では、標準モード、低速モード及び高速モードにおいて、アーム16を揺動させ始める車輪3の回転速度を互いに異ならせることにより、同じ車輪3の回転速度に対して、アーム16の揺動角度を異ならせたが、これには限られない。別の一変形例では、図9に示すように、標準モード、低速モード及び高速モードのいずれの場合にも、車輪3の回転速度が上記回転速度R1となったときにアーム16を揺動させ始め、車輪3の回転速度の増加に対する車輪用プーリ6におけるベルト4が懸架される部分の径の減少の割合、すなわち、アーム16の揺動角度の増加の割合を、高速モード、標準モード及び低速モードの順に大きくしている(変形例2)。この場合でも、車輪3の各回転速度に対するアーム16の揺動角度、つまり、車輪3の各回転速度に対するベルト4の張力が、高速モード、標準モード及び低速モードの順で大きくなる。
【0082】
なお、この場合には、車輪3の回転速度が、標準モードの場合には所定の回転速度R3以上のとき、低速モードの場合には上記回転速度R3よりも速い所定の回転速度R3’以上のとき、高速モードの場合には上記回転速度R3よりも遅い所定の回転速度R3’’以上のときに、それぞれ、図1(b)、図3、図9に示すように、車輪用プーリ6におけるベルト4が懸架される部分の径が最小(D2)となる。
【0083】
また、上述の実施の形態では、図5に示すように、車輪3の回転速度の変化に合わせてアーム16の揺動角度を連続的に変化させることにより、車輪3の回転速度が速くなるほど、アーム16を大きく図1の反時計回りに揺動させたが、これには限られず、車輪3の回転速度の変化に合わせて、アーム16の揺動角度を段階的に変化させてもよい。
【0084】
また、上述の実施の形態では、アーム16の支点16aが、アイドラプーリ7の中心に位置していたが、アーム16の支点16aが他の位置にあってもよい。
【0085】
また、上述の実施の形態では、モータ23がステッピングモータであったが、これには限られず、例えば、モータ23がサーボモータであり、揺動ユニット20に別途、アーム16の揺動角度を検出するセンサが設けられていてもよい。この場合には、モータ23が、このセンサにより検出されたアーム16の揺動角度を参照しながら、アーム16を角度決定部22において決定された角度だけ揺動させればよい。
【0086】
また、上述の実施の形態では、ベルト4が懸架されたテンションプーリ8と接続されたアーム16を揺動させることにより、ベルト4の張力を変化させたが、これには限られず、別の方法によりベルト4の張力を変化させてもよい。
【0087】
また、上述の実施の形態では、2つプーリ片11、12の一方であるプーリ片11が回転軸3aに固定されているとともに、他方であるプーリ片12が移動可能に構成されており、プーリ片12がバネ13によりプーリ片11に向かって付勢されていたが、これには限られず、プーリ片11、12の両方が車輪3の回転軸3aの延在方向に個別に移動可能(プーリ片11とプーリ片12とが相対移動可能)に構成されており、プーリ片11、12に対してそれぞれバネ13が設けられており、バネ13により、プーリ片11、12が互いに近づく方向に付勢されていてもよい、すなわち、プーリ片11がプーリ片12に向かって(図2、図3の右方に)付勢されているとともに、プーリ片12がプーリ片11に向かって(図2、図3の左方に)付勢されていてもよい。
【0088】
また、本実施の形態では、自転車1を、標準モード、低速モード及び高速モードの3つのモードで動作させることができるように構成されていたが、これには限られず、自転車1を、車輪3の各回転速度に対応するアーム16の揺動角度が互いに異なる、2つあるいは4つ以上のモードで動作させることができるように構成されていてもよい。あるいは、自転車1において、モードを選択することができるようになっておらず、標準モードでのみ動作させることができるように構成されていなくてもよい。
【0089】
また、以上の説明では、ベルト4がVベルトであり、可変プーリが、2つのプーリ片及びバネを有する構成となっていたが、これには限られず、例えば、ベルト4の張力が大きくなるほど、可変プーリの径が小さくなるように変形するなど、ベルト4の張力が大きさに応じてベルト4の可変プーリに懸架される部分の径が変化するように構成されていれば、ベルト4及び可変プーリの構成は上述したのとは異なっていてもよい。
【符号の説明】
【0090】
1 自転車
2 ペダル
2a 回転軸
3 車輪
3a 回転軸
4 ベルト
5 クランクプーリ
6 車輪用プーリ
7 アイドラプーリ
8 テンションプーリ
11、12 プーリ片
13 バネ
16 アーム
16a 支点
19 回転速度センサ
20 揺動制御装置
21 モード決定部
22 角度決定部
23 モータ
35 クランクプーリ
36 車輪用プーリ
41、42 プーリ片
43 バネ
【特許請求の範囲】
【請求項1】
自転車に用いられる自動変速装置であって、
前記自転車のペダルの回転軸とともに回転するクランクプーリと、
前記自転車の車輪の回転軸とともに回転する車輪用プーリと、
前記クランクプーリ及び前記車輪用プーリに懸架された無端状のベルトと、
前記ベルトの張力を変化させる張力変更手段と、
前記車輪の回転速度を検出する回転速度検出手段とを備えており、
前記クランクプーリ及び前記車輪用プーリの一方が、前記ベルトの張力が大きくなるほどその前記ベルトが懸架される部分の径が小さくなる可変プーリにより構成されており、
前記張力変更手段は、前記回転速度検出手段により検出された前記車輪の回転速度に応じて前記ベルトの張力を変化させることを特徴とする自動変速装置。
【請求項2】
前記ベルトがその内周側ほど幅が小さくなったVベルトであって
前記可変プーリが、
前記ペダルの回転軸の延在方向に配列されることによって互いに対向しており、前記ペダルの回転軸と一体的に回転するとともに、前記ペダルの回転軸の延在方向に相対移動可能に構成された2つのプーリ片と、
前記2つのプーリ片の少なくとも一方を、前記2つのプーリ片が互いに近づく方向に付勢する付勢手段とを備えており、
前記2つのプーリ片は、前記ベルトが懸架される部分の径が、互いの対向面に近い部分ほど小さくなっていることを特徴とする請求項1に記載の自動変速装置。
【請求項3】
前記車輪用プーリが前記可変プーリによって構成されており、
前記張力変更手段は、前記回転速度検出手段により検出された前記車輪の回転速度が速いほど、前記ベルトの張力が大きくなるように、前記ベルトの張力を変化させることを特徴とする請求項1又は2に記載の自動変速装置。
【請求項4】
前記クランクプーリが前記可変プーリによって構成されており、
前記張力変更手段は、前記回転速度検出手段により検出された前記車輪の回転速度が速いほど、前記ベルトの張力が小さくなるように、前記ベルトの張力を変化させることを特徴とする請求項1又は2に記載の自動変速装置。
【請求項5】
前記張力変更手段が、
所定の支点を中心として揺動可能に構成されたアームと、
前記アームに接続されており、前記ベルトが懸架されるテンションプーリと、
前記アームを揺動させるモータとを有していることを特徴とする請求項1〜4のいずれかに記載の自動変速装置。
【請求項6】
前記車輪用プーリに固定されているとともに、前記ベルトが懸架されるアイドラプーリをさらに備えており、
前記アームが、前記アイドラプーリの中心を支点として揺動可能に構成されていることを特徴とする請求項5に記載の自動変速装置。
【請求項7】
前記張力変更手段が、
前記アームの揺動角度を決定する角度決定手段とをさらに備えており、
前記角度決定手段は、前記回転速度検出手段により検出された前記車輪の回転速度に応じて、前記アームの揺動角度を決定し、
前記モータは、前記角度決定手段により決定された角度だけ、前記アームを揺動させることを特徴とする請求項5又は6に記載の自動変速装置。
【請求項8】
前記車輪の回転速度に対応する前記アームの揺動角度が互いに異なる複数のモードで動作可能であり、
前記張力変更手段が、
前記複数のモードのうち、いずれのモードで動作させるかを決定するモード決定手段をさらに備えており、
前記角度決定手段は、前記回転速度検出手段により検出された前記車輪の回転速度と、前記モード決定手段により決定されたモードとに応じて、前記アームの揺動角度を決定することを特徴とする請求項5〜7のいずれかに記載の自動変速装置。
【請求項1】
自転車に用いられる自動変速装置であって、
前記自転車のペダルの回転軸とともに回転するクランクプーリと、
前記自転車の車輪の回転軸とともに回転する車輪用プーリと、
前記クランクプーリ及び前記車輪用プーリに懸架された無端状のベルトと、
前記ベルトの張力を変化させる張力変更手段と、
前記車輪の回転速度を検出する回転速度検出手段とを備えており、
前記クランクプーリ及び前記車輪用プーリの一方が、前記ベルトの張力が大きくなるほどその前記ベルトが懸架される部分の径が小さくなる可変プーリにより構成されており、
前記張力変更手段は、前記回転速度検出手段により検出された前記車輪の回転速度に応じて前記ベルトの張力を変化させることを特徴とする自動変速装置。
【請求項2】
前記ベルトがその内周側ほど幅が小さくなったVベルトであって
前記可変プーリが、
前記ペダルの回転軸の延在方向に配列されることによって互いに対向しており、前記ペダルの回転軸と一体的に回転するとともに、前記ペダルの回転軸の延在方向に相対移動可能に構成された2つのプーリ片と、
前記2つのプーリ片の少なくとも一方を、前記2つのプーリ片が互いに近づく方向に付勢する付勢手段とを備えており、
前記2つのプーリ片は、前記ベルトが懸架される部分の径が、互いの対向面に近い部分ほど小さくなっていることを特徴とする請求項1に記載の自動変速装置。
【請求項3】
前記車輪用プーリが前記可変プーリによって構成されており、
前記張力変更手段は、前記回転速度検出手段により検出された前記車輪の回転速度が速いほど、前記ベルトの張力が大きくなるように、前記ベルトの張力を変化させることを特徴とする請求項1又は2に記載の自動変速装置。
【請求項4】
前記クランクプーリが前記可変プーリによって構成されており、
前記張力変更手段は、前記回転速度検出手段により検出された前記車輪の回転速度が速いほど、前記ベルトの張力が小さくなるように、前記ベルトの張力を変化させることを特徴とする請求項1又は2に記載の自動変速装置。
【請求項5】
前記張力変更手段が、
所定の支点を中心として揺動可能に構成されたアームと、
前記アームに接続されており、前記ベルトが懸架されるテンションプーリと、
前記アームを揺動させるモータとを有していることを特徴とする請求項1〜4のいずれかに記載の自動変速装置。
【請求項6】
前記車輪用プーリに固定されているとともに、前記ベルトが懸架されるアイドラプーリをさらに備えており、
前記アームが、前記アイドラプーリの中心を支点として揺動可能に構成されていることを特徴とする請求項5に記載の自動変速装置。
【請求項7】
前記張力変更手段が、
前記アームの揺動角度を決定する角度決定手段とをさらに備えており、
前記角度決定手段は、前記回転速度検出手段により検出された前記車輪の回転速度に応じて、前記アームの揺動角度を決定し、
前記モータは、前記角度決定手段により決定された角度だけ、前記アームを揺動させることを特徴とする請求項5又は6に記載の自動変速装置。
【請求項8】
前記車輪の回転速度に対応する前記アームの揺動角度が互いに異なる複数のモードで動作可能であり、
前記張力変更手段が、
前記複数のモードのうち、いずれのモードで動作させるかを決定するモード決定手段をさらに備えており、
前記角度決定手段は、前記回転速度検出手段により検出された前記車輪の回転速度と、前記モード決定手段により決定されたモードとに応じて、前記アームの揺動角度を決定することを特徴とする請求項5〜7のいずれかに記載の自動変速装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2010−164096(P2010−164096A)
【公開日】平成22年7月29日(2010.7.29)
【国際特許分類】
【出願番号】特願2009−5310(P2009−5310)
【出願日】平成21年1月14日(2009.1.14)
【出願人】(000006068)三ツ星ベルト株式会社 (730)
【Fターム(参考)】
【公開日】平成22年7月29日(2010.7.29)
【国際特許分類】
【出願日】平成21年1月14日(2009.1.14)
【出願人】(000006068)三ツ星ベルト株式会社 (730)
【Fターム(参考)】
[ Back to top ]