
自動排便処理装置
【課題】汚物収容タンクの密閉状態を検知することで本体部の誤動作を防止し、的確な汚物排出及び洗浄動作を実現し得る自動排便処理装置を提供すること。
【解決手段】オムツ状ケーシングAと、洗浄手段とを備えた自動排便処理装置Kにおいて、汚物収容部300と、連結部材103と、蓋体304と、前記連結部材103に接続され、前記蓋体304に装着される装着部303と、前記装着部303に設けられた複数の電極308、308とを有し、前記蓋体304は、前記装着部303が所定の態様で装着された状態で前記装着部303に係合して固定するとともに前記複数の電極308、308同士を導通させる固定部材310を有し、前記固定部材310が前記複数の電極308、308同士を導通させると前記装着部303が前記所定の態様で装着された状態で前記蓋体304に固定されたことを検知する検知手段417とを有する。
【解決手段】オムツ状ケーシングAと、洗浄手段とを備えた自動排便処理装置Kにおいて、汚物収容部300と、連結部材103と、蓋体304と、前記連結部材103に接続され、前記蓋体304に装着される装着部303と、前記装着部303に設けられた複数の電極308、308とを有し、前記蓋体304は、前記装着部303が所定の態様で装着された状態で前記装着部303に係合して固定するとともに前記複数の電極308、308同士を導通させる固定部材310を有し、前記固定部材310が前記複数の電極308、308同士を導通させると前記装着部303が前記所定の態様で装着された状態で前記蓋体304に固定されたことを検知する検知手段417とを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、寝たきりの患者や老人等が寝たままで他人の介助無しに用便を処理できる自動排便処理装置に関する。
【背景技術】
【0002】
従来、寝たきりの患者や老人等が寝たままで他人の介助無しに用便をしてその処理をも行えるようにするオムツや装置は種々考案されている。例えば、〔特許文献1〕には側面視略L字状のオムツ状ケーシングに大便センサ、小便センサと共に各種ノズルを備えた技術が開示されている。
【0003】
この排便処理技術は、用便する場合は、まず患者等がオムツ状ケーシングの立ち上がり部を人体股間で挟圧しながら腰臀部をオムツ状ケーシング上に載置し、用便後は、センサで排泄物を感知して自動的に各種ノズルから洗浄水を噴出して局所及びオムツ状ケーシング内を洗浄し、排泄物は排出部から外部に排出し汚物流入管を介して本体部に備えられた汚物収容タンクへ吸入・収容するものであり、自動的に寝たきりの患者の排便処理が行えるようにしたものである。
【特許文献1】特開平8−322868
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかし、これら従来の排便処理技術は、汚物収容タンクの密閉状態を検知する手段を有しておらず、汚物収容タンクの開口部と汚物流入管との接続状態が悪く、汚物収容タンクの密閉状態が確保されていなくても、本体部が動作してしまう場合があり、かかる場合、オムツ状ケーシング内の排泄物を外部へと十分に吸入・排出することができないばかりか、汚物収容タンク内から排泄物やその臭いが外部に漏れるおそれがあった。
【0005】
そこで、本願発明は、汚物収容タンクの密閉状態を検知することで本体部の誤動作を防止し、的確な汚物排出及び洗浄動作を実現し得る自動排便処理装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
請求項1に記載の発明は、人体の排泄部位を覆うように装着するオムツ状ケーシングと、前記オムツ状ケーシングに配設され、流体を射出して前記オムツ状ケーシングに排泄された排泄物を前記オムツ状ケーシングから排出し、前記オムツ状ケーシングの洗浄を行うための洗浄手段とを備えた自動排便処理装置において、前記オムツ状ケーシングから排出された排泄物を前記流体とともに収容する汚物収容部と、前記オムツ状ケーシングから排出された排泄物を前記流体とともに前記汚物収容部に導く連結部材と、前記汚物収容部を閉塞するための蓋体と、前記連結部材に接続され、前記蓋体に装着される装着部と、前記装着部に設けられた複数の電極とを有し、前記蓋体は、前記装着部が所定の態様で装着された状態で前記装着部に係合して固定するとともに前記複数の電極同士を導通させる固定部材を有し、前記固定部材が前記複数の電極同士を導通させると前記装着部が前記所定の態様で装着された状態で前記蓋体に固定されたことを検知する検知手段を有することを特徴とする。
【0007】
請求項2に記載の発明は、請求項2に記載の発明は、請求項1記載の自動排便処理装置において、前記蓋体と前記装着部とは、互いに所定の態位を占めるときにのみ前記所定の態様で装着されることを特徴とする。
【0008】
請求項3に記載の発明は、請求項1又は2記載の自動排便処理装置において、前記蓋体は、前記汚物収容部に螺合して閉塞することを特徴とする。
【0009】
請求項4に記載の発明は、請求項1ないし3のいずれか1つに記載の自動排便処理装置において、前記汚物収容部の重量を検知する重量検知手段を有し、前記重量検知手段は、前記汚物収容部を変位可能に弾性的に支持する弾性部材と、前記汚物収容部の重量に応じた変位を検知する変位検知手段とを有することを特徴とする。
【発明の効果】
【0010】
請求項1に記載の発明によれば、オムツ状ケーシングから排出された排泄物を流体とともに収容する汚物収容部と、オムツ状ケーシングから排出された排泄物を流体とともに汚物収容部に導く連結部材と、汚物収容部を閉塞するための蓋体とを備え、連結部材に接続され、蓋体に装着される装着部と、装着部に設けられた複数の電極とを有し、蓋体は、装着部が所定の態様で装着された状態で装着部に係合して固定するとともに複数の電極同士を導通させる固定部材を有し、固定部材が複数の電極同士を導通させると装着部が所定の態様で装着された状態で蓋体に固定されたことを検知する検知手段を有するので、汚物収容タンク内の密閉状態が確保されていない場合に、本体部が動作することを防止し、また、汚物収容タンク内からは排泄物やその臭いが外部に漏れることを防止することができる。
【0011】
請求項2に記載の発明によれば、蓋体と装着部とは、互いに所定の態位を占めるときにのみ所定の態様で装着されるので、蓋体と装着部は、その隙間の無い状態で装着されることとなり、汚物収容部からの排泄物の漏れを防ぐことができる。
【0012】
請求項3に記載の発明によれば、蓋体は、汚物収容部に螺合して閉塞するので、容易な構造で汚物収容部を閉塞することができ、また、汚物収容部内から排泄物を捨てる際における蓋体の取り外しも容易となる。
【0013】
請求項4に記載の発明によれば、汚物収容部の重量を検知する重量検知手段を有し、重量検知手段は、汚物収容部を変位可能に弾性的に支持する弾性部材と、汚物収容部の重量に応じた変位を検知する変位検知手段とを有するので、汚物収容部の重量に応じて弾性部材が伸縮し、変位検知手段が汚物収容部との間の距離を検知して汚物収容部の重量を確実に検知することができ、汚物収容部内が排泄物で満たされた際に、その交換時期を知らせることができる。
【発明を実施するための最良の形態】
【0014】
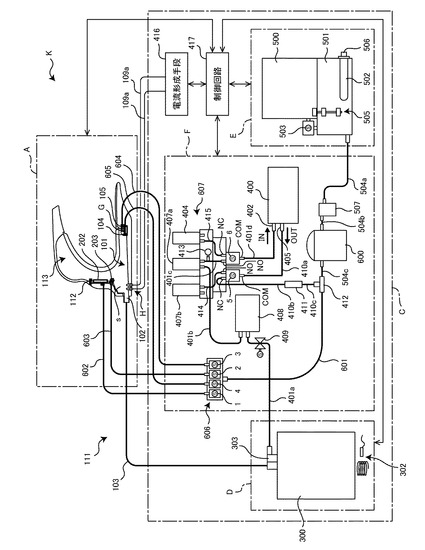
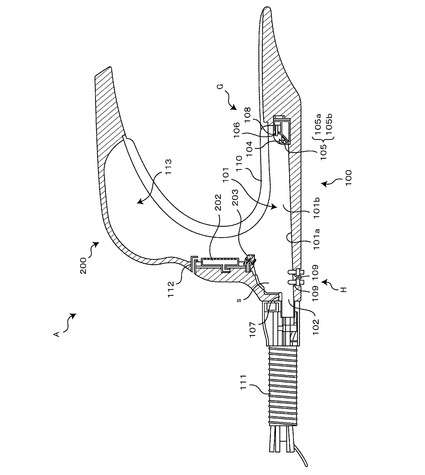
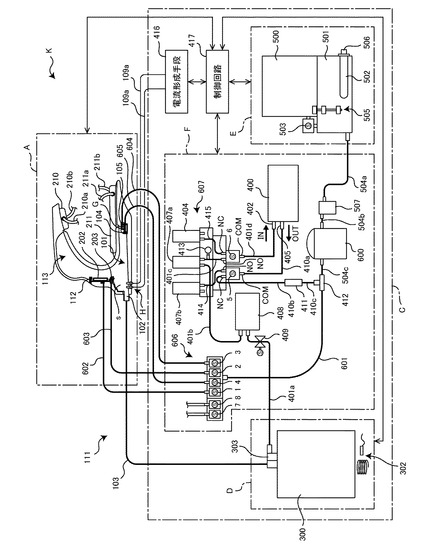
以下、図面を参照して本発明の実施の形態について説明する。図1は、本発明の実施の形態にかかる自動排便処理装置Kの構成を示す図である。図1に示すように、自動排便処理装置Kは、患者によって装着されるオムツ状ケーシングAと、オムツ状ケーシングA内部の排泄物または汚水を吸引し蓄積する本体部Cと、本体部Cとオムツ状ケーシングAとを接続する外観処理ホース111とを備えている。外観処理ホース111の内部には、汚物を吸入搬送するための連結部材としての汚物流入管103、及び、洗浄水を送水するための後述する各種ノズル管602,603,604,605が挿通されている。本体部Cは、制御回路417を有しており、制御回路417における電気的制御により、オムツ状ケーシングA内の排泄物及び汚水は、汚物流入管103を通して本体部Cに吸引され、蓄積される。この他、自動排便処理装置Kは、制御回路417による各種制御により、後述するオムツ状ケーシングA内の洗浄、乾燥等の各種動作を自動的に実行し得るように構成されている。
【0015】
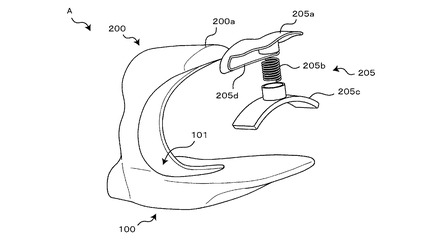
オムツ状ケーシングAの構成について説明する。図2は、オムツ状ケーシングAの外観斜視図であり、図3は、その正面図であり、図4は、その側断面図である。図2に示すように、オムツ状ケーシングAは概括的には、人体の腰臀部を包被する形状に形成されている。具体的には、オムツ状ケーシングAは、略方形状の支持プレート部100と、その後端に立ち上がり部200とを有し、全体形状を側面視で略コ字状となるように一体的に形成されている。
【0016】
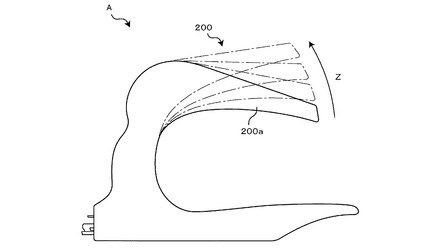
支持プレート部100は、後部に向かって斬次細幅状となるような略方形状に形成している。立ち上がり部200は、支持プレート部100の後端から垂直に立ち上がり、その中途部から斬次手前方向に湾曲するように形成している。立ち上がり部200は、その上部を前方に傾倒自在に構成しており、患者が支持プレート部100に仰臥した状態で排便等を行うとき、立ち上がり部200は前方に傾倒して太腿部から股部にかけて上方より覆う状態となっている。
【0017】
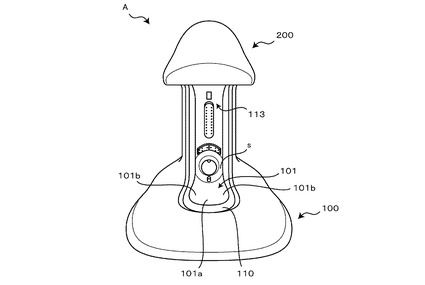
支持プレート部100の上面は、臀部を密着載置することが可能なやや凹み形状とし、その中央に臀部載置時の肛門位置から後方に向けて排泄物を溜めて洗浄・吸引時に流すための汚物流路101を凹設している。この汚物流路101は、図3に示すように、凹部を形成する底面101a及び両側面101b,101bが所定の曲率を有し、横断面で略U字状となるように滑らかな曲面を形成している。また、立ち上がり部200には、汚物流路101に連設され、排泄物を受けるための前面凹部113を凹設している。汚物流路101と前面凹部113との周縁には、楕円形の環状を成し、腰臀部と人体股間部にわたって密着する防水用シール110を設けている。防水用シール110は、シリコンなどの弾力性を有する素材を使用してオムツ状ケーシングAと人体との間のシール機能を果たすように構成されている。
【0018】
オムツ状ケーシングAは、図4に示すように、汚物流路101の終端で、かつ、立ち上がり部200の下部において、前面凹部113より排出部102側に凹む位置に汚物貯留空間sを形成し、この汚物貯留空間sの終端において排出部102を開口している。この汚物貯留空間sは、図3及び図4に示すように、汚物流路101の終端とその曲率が一致するように滑らかに連設され、排出部102へ向かって流路幅を徐々に減少させて、排出部102側を底部とする筒状の空間を形成している。
【0019】
立ち上がり部200の下端両側縁は、人体股間で挟圧可能な形状に形成し、患者は股間で立ち上がり部200を挟んだ状態で大腿部を支持プレート部100の後部上面に載置する。かかる姿勢の患者の肛門から立ち上がり部200の下部の排出部102に至る空間に汚物貯留空間sが形成されることになる。汚物貯留空間sは、汚物流路101から前面凹部113にかけて防水用シール110で閉塞されるので、人体との間で完全な密閉状の空間と化する。
【0020】
オムツ状ケーシングAは、人体の肛門直下の位置に汚物流路101を設けているので、多量の排泄物に対しても十分に対処可能なスペースを確保することができる。また、オムツ状ケーシングAは、排出部102へ至るまでに汚物貯留空間sを設けているので、人体の各部及びオムツ状ケーシングA内を洗浄する洗浄工程においてオムツ状ケーシングA内の洗浄効果を向上させることができる。かかる洗浄工程における汚物貯留空間sの効果については後述する。
【0021】
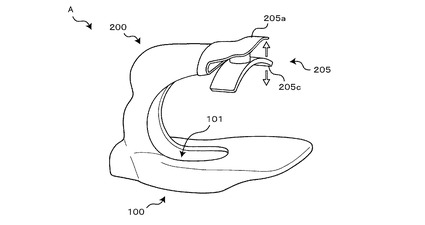
立ち上がり部200は、図5に示すように、その先端部200aに人体とオムツ状ケーシングAとを固定するための自動固定装置205を着脱自在に備えている。図2又は図5に示すように、自動固定装置205は、自動固定装置205を先端部200aに取り付けるための取付カバー205aと、人体の腹部を押圧して人体とオムツ状ケーシングAとを互いに位置決めする押圧部205cと、押圧部205cによる人体の押し度合いを調整するスプリング205bとを有している。自動固定装置205は、押圧部205cをスプリング205bを介して取付カバー205aに嵌合することにより組み立てられる。自動固定装置205は、取付カバー205aに備えられた取付穴205dを、先端部200aに挿通することにより固定される。患者がオムツ状ケーシングAを着用する際には、押圧部205cが、スプリング205bの弾性力に基づき図中に示す矢印の方向に上下動し、人体に押圧されるので、オムツ状ケーシングAと人体との自動固定が可能となる。押圧部205cは、触感及びクッション性の良好な素材、例えば、ウレタンなどの素材から成る。
【0022】
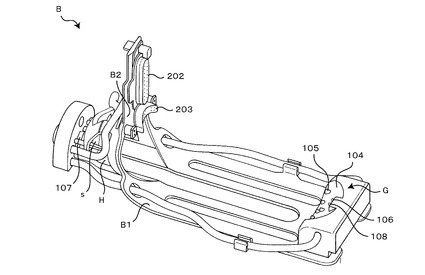
オムツ状ケーシングAの内部構造について詳述する。図6は、オムツ状ケーシングAの内部構造を示す詳細図である。オムツ状ケーシングAは、図6に示すように、略方形状の枠からなる支持フレームB1とその後端に立設した縦フレームB2とから構成されたフレームとしてのオムツフレームBをその内部に有する。支持フレームB1は、患者の自重によりオムツ状ケーシングAが歪曲しないように所定の剛性を有している。縦フレームB2は、立ち上がり部200(図4参照)の傾倒により、オムツ状ケーシングAと人体との密閉状態が崩れて内部の排泄物や洗浄水が漏れる不具合を防止できるように所定の剛性を有している。
【0023】
オムツフレームBには、人体の各部位を洗浄するため洗浄水を噴射する各種ノズル104,105,202,203が各所に配置されている。また、オムツフレームBには、汚物流路101内に排出された大便等の汚物を感知して排便がなされたことを感知し、その後の電気的制御を介して各種の制御作動、例えば、上記各種ノズル104,105,202,203からの洗浄水の噴射や汚物の排出等の作動をなすための各種センサ106,107,108,109が各所に配置されている。
【0024】
このように、オムツ状ケーシングAは、オムツフレームBに、各種ノズル104,105,202,203や各種センサ106,107,108,109、その他自動排便処理に必要な電気部材等を設置した後、ウレタン等のケーシング素材を射出発泡することによりカバーリングされ、その外観構成が形成される。なお、オムツ状ケーシングAによってカバーリングされた各種ノズル104,105,202,203や各種センサ106,107,108,109等はオムツ状ケーシングA内部へ露出するように構成される。各種センサ類106,107,108,109の詳細については、後述することとし、まず、各種ノズル104,105,202,203について詳細に説明する。
【0025】
図4に示すように、オムツ状ケーシングAは、前面凹部113の底面の下端部に配設された肛門用ノズル203と、前面凹部113の底面の、肛門用ノズル203より上方の位置に配設されたビデ用ノズル202とを有している。また、オムツ状ケーシングAは、汚物流路101の、排出部102と反対側の端部に配設された大便用ノズル105と、汚物流路101の、排出部102と反対側の端部における、大便用ノズル105より上方の位置に配設された尻用ノズル104とを有している。図1に示すように、各種ノズル104,105,202,203には、それぞれ尻用ノズル管604、大便用ノズル管605、ビデ用ノズル管602、肛門用ノズル管603が接続されている。各種ノズル104,105,202,203には、それぞれ各ノズル管604,605,602,603を介して、本体部Cから洗浄水が供給される構成となっている。
【0026】
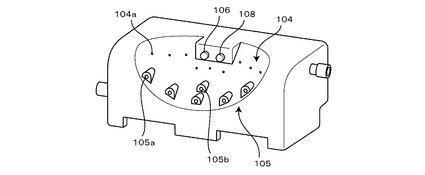
図7に示すように、尻用ノズル104は、噴射範囲として、患者の尻部分に付着した排泄物を洗浄水により洗浄するためのノズルである。尻用ノズル104は、尻用噴射孔104aを、その噴射方向が患者の尻部を向くように複数有しており、より広範囲の洗浄を可能とするために尻部の曲面に対応して所定の曲率を持つ態様で配設されている。尻用噴射孔104aは、最も大便が付着する患者の尻部中央部に噴射される洗浄水の噴射圧を最大とするために、中央へ向かって噴射孔径を漸次増加するように構成されている。また、尻用ノズル104から噴射される洗浄水の流量は、4.68l/min、平均流速は、0.012m/sとなるように設定されている。
【0027】
大便用ノズル105は、主として、洗浄水の噴射水圧により大便を細かく粉砕しつつ、大便を汚物流路101から排出部102へ向けて押し流す処理(以下、大便粉砕処理という。)を行うためのノズルである。大便用ノズル105は、尻用ノズル104の下方の汚物流路101の底面側に設けられている。大便用ノズル105は、大便粉砕用噴射孔105aを、その噴射方向が汚物流路101の底面で、かつ、大便が最も溜まり易い人体の肛門直下へ向くように複数有している。大便粉砕用噴射孔105aは、その噴射範囲として、大便が最も溜まり易い箇所である汚物流路101中央に向かって噴射される洗浄水の噴射圧を最大とするために、中央へ向かって噴射孔径を漸次増加するように構成されている。かかる構成とすることで、汚物流路101中央に堆積する大便が最先に粉砕され、洗浄水が排出部102へ向かって流れる流路が確保されることとなる。したがって、大便用ノズル105から洗浄水を噴射し始める初期段階において、大便により跳ね返り、塞き止められた洗浄水が汚物流路101から溢れ出す不具合を防止し得る。大便用ノズル105から噴射される洗浄水の流量は、4.8l/min、平均流速は、0.013m/sとなるように設定されている。また、大便用ノズル105は、後述する加圧ポンプ600に連通し、温水タンク501からの温水を大便用ノズル105から毎分3L、水圧1kgf/cm2の洗浄水として噴射できるように構成している。
【0028】
また、大便用ノズル105は、大便粉砕用噴射孔105aの上方で、尻用噴射孔104aの下方に、センサ洗浄用孔105bを設けている。センサ洗浄用孔105bは、図4に示すように、その噴射方向が排出部102近傍に設けられた後述する赤外線センサの受光部107へ向くように構成されている。かかる構成により、センサ洗浄用孔105bは、大便粉砕処理に加えて、大便粉砕処理を終えた後に、対向する位置に配された受光部107に洗浄水を噴射してその表面を洗浄し、赤外線センサの誤動作を防ぐことが可能となる。
【0029】
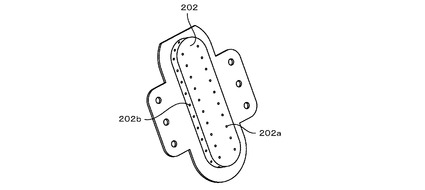
図8に示すビデ用ノズル202は、主な噴射範囲として、人体の陰部に付着する排泄物を洗浄するためのノズルであり、男女の別や体型の差に関わらず陰部を洗浄することができるように、細幅かつ縦長の形状となっている。ビデ用ノズル202は、ビデ用噴射孔202aを、その噴射方向が患者の陰部を向くように複数有している。ビデ用噴射孔202aは、尻用ノズル104の尻用噴射孔104a及び大便用ノズル105の大便粉砕用噴射孔105aと比較して孔径を小さくし、孔数を多く構成している。かかる構成とすることで、広範囲の洗浄をしつつ、洗浄水の噴射圧を適度に抑えることができ、人体中でも特にデリケートな陰部に対してソフトな洗浄が可能となる。ビデ用ノズル202は、オムツ状ケーシングA内部に飛散した小便の洗浄をするために、その側部全体を囲うように複数の小便処理噴射孔202bを有している。ビデ用ノズル202から噴射される洗浄水の流量は、4.68l/min、平均流速は、0.010m/sとなるように設定されている。
【0030】
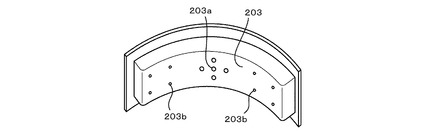
図9に示すように、肛門用ノズル203は、噴射範囲として、患者の肛門及び肛門周辺に付着する排泄物を洗浄するためのノズルであり、その中央に配設された複数の肛門中央噴射孔203aと、肛門中央噴射孔203aの両側側面に配設された複数の肛門周辺噴射孔203bとを有している。肛門中央噴射孔203aは、その噴射方向が患者の肛門へ向かうように構成されており、肛門周辺噴射孔203bは、その噴射方向が肛門の周辺へ向かうように構成されている。肛門中央噴射孔203aの孔径は、肛門周辺噴射孔203bと比較して大きく、かつ、大便粉砕用噴射孔105a及び尻用噴射孔104aの孔径と略同一の孔径で構成されている。かかる構成とすることにより、肛門中央噴射孔203aから噴射される洗浄水の噴射圧を大きくし、人体の肛門の奥深くまで洗浄することが可能となる。他方、肛門周辺噴射孔203bから噴射される洗浄水の噴射圧を適度に抑え、人体中でも特にデリケートな肛門周りに対してソフトな洗浄が可能となる。肛門用ノズル203から噴射される洗浄水の流量は、4.8l/min、平均流速は、0.019m/sとなるように設定されている。
【0031】
なお、より効果的な洗浄を可能とするために、大便粉砕用噴射孔105aや、肛門中央噴射孔203aについては、オリフィス構造を採用しても良い。オリフィス構造とすることで、洗浄水の噴射範囲を広げることができ、洗浄水の水量を抑えつつ、人体の広範囲を洗浄することが可能となる。
【0032】
また、上述した各種ノズル104,105,202,203には、本体部Cより各種ノズル管602,603,604,605を介して、洗浄水のみならず空気が供給される構成となっている。すなわち、洗浄水により患者の各部位を洗浄した後、空気を吹き付けることにより、乾燥させるようになっている。図4に示すように、各種ノズル104,105,202,203からオムツ状ケーシングA内に空気が供給される際に、この空気をオムツ状ケーシングA内から外気へ逃がすための通気孔112が立ち上がり部200の所定箇所に穿たれている。
【0033】
各種センサ106,107,108,109の構成について詳述する。図4に示すように、オムツ状ケーシングAには、汚物流路101の、排出部102と反対側の端部に赤外線センサの発光部106が配設され、排出部102の前縁部上側には赤外線センサの受光部107が配設されると共に、発光部106に隣接して赤外線センサの受信部108が配設されている。これら発光部106、受光部107、及び受信部108は、汚物流路101における大便を検知する大便検知センサGとして機能する。オムツ状ケーシングAには、他に汚物貯留空間s底面に小便を検知する小便検知センサHが配設されており、大便検知センサG及び小便検知センサHは、オムツ状ケーシングAの排泄物を検知する検知手段として機能する。各種センサG,Hは、オムツ状ケーシングA内の大便及び/又は小便を検知した旨の検知信号を図1に示した制御回路417に送信し、制御回路417は、かかる検知信号に基づき、本体部Cの各種の電気的制御を実行する。
【0034】
大便検知センサGは、発光部106より発信された赤外線が、対向する受光部107で受信されたか否かに基づき、発光部106と受光部107の間、すなわち汚物流路101に大便が存在するか否かを検知する。なお、受光部107は、赤外線以外の周囲の光によって誤作動を起こすことを防止するために、周囲の光が届きにくい排出部102の上部に設置されている。
【0035】
ところで、患者がオムツ状ケーシングAをクッション性の高いベッド上で使用する場合には、患者の自重により圧されることによりオムツ状ケーシングAが凹み、汚物流路101に傾きを生じる可能性がある。かかる場合、オムツ状ケーシングA内での洗浄、排泄物の吸引が不十分となり、発光部106が、汚物流路101内に残った洗浄水中に沈み、赤外線が受光部107まで到達しない状態となる。その結果、大便検知センサGが大便を検知した場合と同様の状態となるので、オムツ状ケーシングAが誤作動を起こすこととなる。
【0036】
そこで、かかる誤作動を防止するために、大便検知センサGは、図7に示すように、オムツ状ケーシングAの傾きを検知するための受信部108を発光部106の近傍に備えている。受信部108は、発光部106に隣り合うように設けられており、発光部106から側方へ発信される赤外線を検知可能であるが、発光部106及び受信部108が水没したときには、赤外線を検知できないようになっている。
よって、大便検知センサGは、発光部106が汚物流路101内に残った洗浄水中に沈み、受光部107及び受信部108のいずれもが赤外線を受信しない場合には、オムツ状ケーシングAに傾きが発生していることを検知できる構成となっている。大便検知センサGは、オムツ状ケーシングAに傾きが発生し、受光部107及び受信部108のいずれもが赤外線を受信しない場合には、その旨の検知信号を本体部Cの制御回路417に送信する。かかる検知信号を受信した本体部Cは、制御回路417の制御に基づき図示しない表示部においてエラー表示を行うと共に全ての機能を停止する。なお、オムツ状ケーシングAが傾く状況が発生し得ない場合等には、受信部108を設けず、発光部106及び受光部107のみで大便検知を行う構成としても良い。
【0037】
また、図4に示すように、小便検知センサHは、前後に隣り合うように配設された一対の電極109,109を備えており、一対の電極109,109は、少量の小便をも確実に検知し得るように、オムツ状ケーシングA内で小便が最も集り易い汚物貯留空間sに配設されている。また、電極109、109は、図1に示すように、それぞれ一対の導電線109a,109aを介して本体部Cに設けられた電流形成手段416と接続されており、制御回路417の制御に基づき電流形成手段416からいずれか一方の電極109に導電線109aを介して微弱な電流を流すように設定されている。そして、小便検知センサHは、電極109,109間がかかる微弱な電流によって洗浄水又は小便を導体として通電した際の電流値を検知する構成となっている。小便検知センサHが検知した電流値は、制御回路417に送信され、制御回路417は、かかる電流値が所定の値であるか否かにより小便を検知する。この際、制御回路417は電極109,109の間に流れた電流値が所定の値であるか否かにより小便を検知する判断手段として機能する。
【0038】
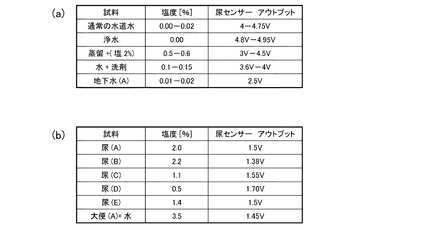
ここで、一般に、洗浄水と小便とでは塩度の差が存在するために、電気伝導率の差があり、小便検知センサHが検知する電流値は、洗浄水と小便とで異なる値となる。図10(a)は、小便検知センサHを用いて、洗浄水として使用可能な各種の水について電流値を測定した実験結果であり、図10(b)は、任意に選んだ被験者(A)〜(E)の小便について電流値を測定した実験結果である。なお、尿センサウトプット値は、A/Dコンバータを用いて電圧値に変換した電流値である。また、例えば、図10(b)において、「尿(A)」は被験者(A)の尿を測定した結果を示している。
【0039】
図10から明らかなように、小便は水と比較して塩度が高く、この塩度の差に対応して両者の尿センサウトプット値に大きな差があることが確認される。したがって、小便検知センサHによって、電極109,109間の電流値を検知し、例えば、尿センサウトプット値に対して2.0Vのしきい値を用いることで洗浄水と小便とを確実に判別することが可能となる。
【0040】
なお、電極109,109は、腐食防止のため汚物流路101に露出した部分を金鍍金している。電流形成手段416は、上述の一方の電極109への印加電圧の+極と−極とを交差して交番電流を流すようになっている。かかる構成により、いずれか一方の電極109だけが酸化して腐食することや異物が付着することにより検知精度が低下する不具合を防止することができる。また、電極109は、全体を金鍍金しても良いが、少なくとも汚物流路101に露出した部分を金鍍金するように構成することで、生産コストを節約することができる。
【0041】
このような構成により、患者が排便及び/又は排尿すると、オムツ状ケーシングAは、大便検知センサG及び/又は小便検知センサHにより大便及び/又は小便を検知し、その検知信号を本体部Cの制御回路417へと送信する。かかる検知信号を受信した本体部Cは、制御回路417の制御に基づき、各種ノズル管602,603,604,605に洗浄水を供給し、各種ノズル104,105,202,203の各々から洗浄水がオムツ状ケーシングA内へ噴射される。これにより、患者の尻、陰部及び肛門が洗浄される一方で、大便及び/又は小便が排出部102の方へ流される。このように患者の各部位とオムツ状ケーシングA内を洗浄する洗浄工程を終えた後に、本体部Cは、各種ノズル管602,603,604,605内部に残留する洗浄水を吸引して水抜をし、各種ノズル管602,603,604,605に空気を供給して患者の尻、陰部及び肛門の乾燥がなされる乾燥工程が実行される。
【0042】
本体部Cについて説明する。図1に示すように、本体部Cは、オムツ状ケーシングAの汚物を収容する排泄物収容部Dと、オムツ状ケーシングAの洗浄動作などの各種動作を遂行する装置制御部Fと、オムツ状ケーシングAに洗浄水を供給する洗浄水供給部Eとを有している。本体部Cは、制御回路417の各種の制御に基づき、排泄物収容部D、装置制御部F、洗浄水供給部Eを動作するように構成されている。
【0043】
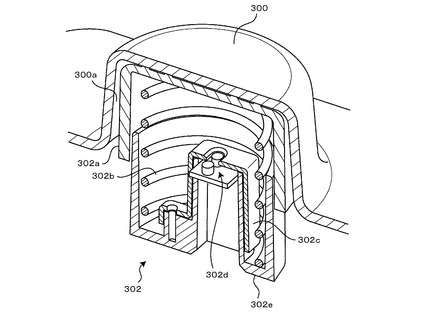
排泄物収容部Dは、オムツ状ケーシングAから排出された排泄物を洗浄水とともに収容する汚物収容部としての汚物収容タンク300を有しており、汚物収容タンク300は、汚物流入管103を介して、オムツ状ケーシングAの排出部102と接続されている。汚物収容タンク300は、その内部の汚物を捨てる際には、本体部Cから取り外しができるように構成されている。図11又は図12に示すように、汚物収容タンク300の底部付近には、汚物収容タンク300内に貯留された汚物の重量を検出する重量センサ302が設けられている。重量センサ302は、汚物収容タンク300内に所定の重量(例えば、8kg)の汚物が溜まると交換時期を知らせるための信号を制御回路417へ送信する。本体部Cは、かかる信号を受信した制御回路417の制御に基づき、所定の箇所に設けられた図示しない表示部に汚物収容タンク300内の汚物を捨てる交換時期である旨を表示するようになっている。
【0044】
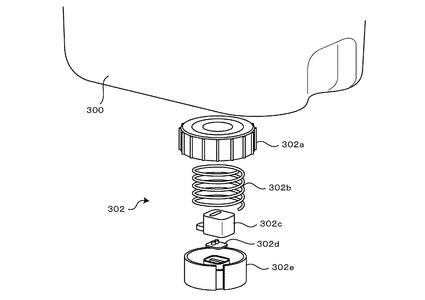
重量センサ302は、図11に示すように、本体部Cの図示しない筐体に重量センサ302が露出するように固定された固定ボディー302e上に変位検出手段としてのフォトリフレクタ302dを載置している。重量センサ302は、フォトリフレクタ302dの上方から固定キャップ302cを被せた上で、固定ボディー302eに弾性部材としてのスプリング302bを挿入し、センサカバー302aでカバーリングされて組み立てられる。重量センサ302は、汚物収容タンク300の重量に応じてスプリング302bが伸縮することで、センサカバー302aが固定ボディー302eに対して上下動するように構成されている。重量センサ302は、図12に示すように、汚物収容タンク300底部に設けられたセンサ用凹部300aをセンサカバー302aに嵌合した状態で、汚物収容タンク300がセンサカバー302a上に載置されるように構成されている。センサ用凹部300aとセンサカバー302aとは、汚物収容タンク300が本体部Cの図示しない筐体内において、所定の方向位置を占めるときのみ嵌合するようになっている。
【0045】
フォトリフレクタ302dは、発光部と受光部とを有し受光部が検知した光の強度に基づいてセンサカバー302aの裏面までの距離を検知する。重量センサ302は、フォトリフレクタ302dが検知したセンサカバー302aまでの距離に基づき、汚物収容タンク300の重量を検知するようになっている。
【0046】
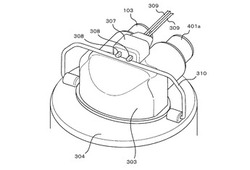
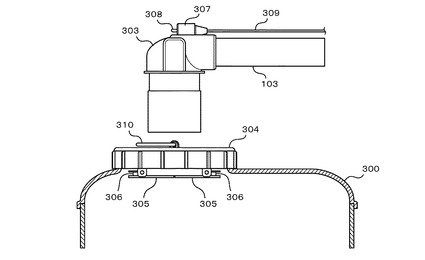
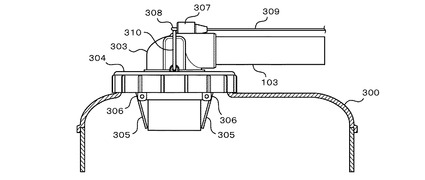
図13ないし図17に示すように、汚物収容タンク300の上部の開口部には、蓋体としてのタンク蓋体304が螺合により着脱自在に設けられており、汚物収容タンク300の上部の開口部は、タンク蓋体304が螺合により適切に装着された状態で閉塞されるように構成されている。タンク蓋体304は、後述するように開閉される図示しない楕円形状の開口部を有しており、タンク蓋体304の開口部には、この開口部の形状に対応した楕円形状の装着部としてのホース連結部303が着脱自在に装着されている。ホース連結部303は、汚物流入管103と接続され、オムツ状ケーシングAから排出された排泄物は、汚物流入管103、ホース連結部303を介して汚物収容タンク300内に収容される。タンク蓋体304の開口部とホース連結部303は、互いに対応する楕円形状から成るため、かかる楕円形状が一致したときのみ、タンク蓋体304とホース連結部303とは、両者間の隙間の無い状態で適切に装着され、汚物収容タンク300内の排泄物が漏れないように構成されている。汚物収容タンク300は、汚物収容タンク300の上部の開口部がタンク蓋体304により閉塞され、かつ、タンク蓋体304とホース連結部303が適切に装着されることで完全な密閉状態となり、汚物収容タンク300内の排泄物の漏れが無い状態となる。
【0047】
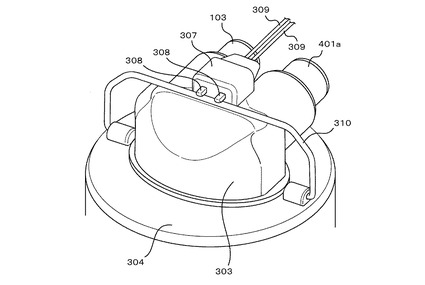
タンク蓋体304は、その上面に、タンク蓋体304とホース連結部303が適切に装着された状態でホース連結部303に係合してホース連結部303をタンク蓋体304に固定するための固定部材としての固定金具310が設置されている。固定金具310の両端は、タンク蓋体304上で回動自在に設置されており、ホース連結部303とタンク蓋体304が適切に装着された状態で固定金具310を起こしてホース連結部303の上部をタンク蓋体304に向けて押圧してホース連結部303をタンク蓋体304に固定できるように構成されている。
【0048】
ホース連結部303の上部には、図15に示すように、筐体307が設置されて、この筐体307には一対の電極308,308が所定の間隔を置いて固定支持されている。電極308,308は、一対の信号線309,309に接続されており、この信号線309,309は、図1に示す制御回路417に接続されており、この制御回路417から信号線309,309のいずれか一方に電流を流すように設定されている。電極308,308は、タンク蓋体304を汚物収容タンク300に螺合して閉塞し、かつ、タンク蓋体304とホース連結部303が適切に装着された状態で、固定金具310を起こし、ホース連結部303をタンク蓋体304に固定するとこの固定金具310により導通するように構成されている。この状態では、電極308,308間が固定金具310を介して通電し、制御回路417は、この通電による電流を検知することにより、タンク蓋体304とホース連結部303が適切に装着された状態で、ホース連結部303がタンク蓋体304に固定されたこと、すなわち、汚物収容タンク300が完全な密閉状態となったことを検知する。一方、タンク蓋体304とホース連結部303との装着状態が悪い場合には、制御回路417は、上述の通電を検知しないので、汚物収容タンク300内の密閉状態が確保されていないことを検知する。かかる場合には、本体部Cは、制御回路417の制御に基づき全ての機能を停止し、図示しない表示部にエラー表示を行うようになっている。この際に、制御回路417は、タンク蓋体304とホース連結部303が適切に装着された状態で、ホース連結部303がタンク蓋体304に固定されたことを検知し、汚物収容タンク300が完全な密閉状態であるか否かを検知する検知手段として機能する。したがって、汚物収容タンク300内の密閉状態が確保されていない場合に、本体部Cが動作することを防止し、また、汚物収容タンク300内から汚物やその臭いが外部に漏れることを防止することができる。
【0049】
なお、タンク蓋体304が汚物収容タンク300に螺合されて閉塞されているか否かは、外観上で明確に視認できる場合が多く、また、固定金具310を起こしてホース連結部303を固定する際にタンク蓋体304が緩んでいる感触により確認できる場合が多い。したがって、本実施形態においては、タンク蓋体304が汚物収容タンク300に螺合されて閉塞されているか否かを検知する構成を採用していないが、かかる構成を採用しても良い。例えば、固定金具310の両端をタンク蓋体304の上面ではなく、汚物収容タンク300の上面に回動自在となるように設置し、固定金具310が、ホース連結部303をタンク蓋体304と共に汚物収容タンク300に固定するようにしても良い。この構成では、汚物収容タンク300が、タンク蓋体304との螺合により閉塞され、かつ、ホース連結部303がタンク蓋体304に固定された場合にだけ、固定金具310を起こし、ホース連結部303をタンク蓋体304に固定できるようになっている。したがって、制御回路417は、上述の通電を検知してタンク蓋体304が汚物収容タンク300に螺合されて閉塞されていることをも検知することができる。
【0050】
図13に示すように、タンク蓋体304の汚物収容タンク300内部側には、一対の内部蓋体305,305が備えられており、この一対の内部蓋体305,305は、ホース連結部303がタンク蓋体304から離脱したときにタンク蓋体304の開口部を汚物収容タンク300内部側から自動的に閉蓋し得るように構成されている。すなわち、図13に示すように、内部蓋体305,305は、スプリング306,306により閉蓋方向に付勢されており、ホース連結部303を取り外した状態では、内部蓋体305、305はスプリング306,306の付勢によりタンク蓋体304の開口部を汚物収容タンク300内部から閉蓋する。一方、図14に示すように、ホース連結部303をタンク蓋体304に挿入して接続した状態では、内部蓋体305,305は下方に垂下状態で開蓋形態になっている。かかる構成により、本体部Cから汚物収容タンク300を取り外して中の汚物を捨てる際に、ホース連結部303を汚物収容タンク300から取り外しても、タンク蓋体304の開口部の内部蓋体305,305により自動的に閉蓋されるので、汚物収容タンク300内の汚物のにおいや汚物自体が外部へ流出することはなく、汚物収容タンク300を安全に持ち運びすることができる。汚物収容タンク300を所定の場所まで運んだ後は、タンク蓋体304を取り外し、汚物収容タンク300の上部の開口部から汚物を捨てることとなる。
【0051】
また、図15に示すように、ホース連結部303には、汚物流入管103と隣り合うように吸気管401aが接続されている。図1に示すように、汚物収容タンク300は、吸気管401aを介して装置制御部Fに接続されている。汚物収容タンク300の内部は、後述する装置制御部Fにおける吸入ポンプ400の作動により吸気管401aを介して空気が吸入されて負圧状態が形成され、汚物流入管103を介して汚物をオムツ状ケーシングAから吸引することができるようになっている。
【0052】
洗浄水供給部Eは、図1に示すように、洗浄水としての原水を供給する原水タンク500と、オムツ状ケーシングA内に供給する洗浄水を所定温度に加熱するための温水タンク501と、原水タンク500から温水タンク501への給水を制御するソレノイドバルブ503を備えている。温水タンク501は、原水タンク500からソレノイドバルブ503を介して供給された原水を加熱する管ヒータ502と、水位を感知する水位センサ505と、水温を感知する温度センサ506とを備えている。洗浄水供給部Eは、水位センサ505で温水タンク501内の水位が、給水を要する状態であることを検知すると、かかる検知信号を制御回路417へ送信する。洗浄水供給部Eは、かかる検知信号を受信した制御回路417の制御によりソレノイドバルブ503を開いて、原水タンク500から温水タンク501へ所定量の原水を供給する。次に、洗浄水供給部Eは、水位センサ505で温水タンク501内が原水で満たされて所定の水位に到達したことを検知すると、かかる検知信号を制御回路417へ送信し、制御回路417の制御に基づきソレノイドバルブ503を閉じて原水供給を遮断する。
【0053】
洗浄水供給部Eは、温水タンク501内の原水の温度を温度センサ506で検知して検知信号を制御回路417へ送信し、制御回路417の制御を介して患者が予め設定する温度に維持するように、かかる原水を管ヒータ502で加熱して温水とする。患者が予め設定する温度は、体温に近い温度を基準に決定される。かかる構成により、温水タンク501中の温水を洗浄水としてオムツ状ケーシングA内へ送水する洗浄工程を実行する際には、患者へは常に体温に近い温度の洗浄水が供給されるので、患者は良好な使用状態を得ることができる。温水タンク501の底部側面に設けられた出口は、送水管504aを介して装置制御部Fに接続されており、この送水管504aを介して温水タンク501内で加熱された洗浄水が装置制御部Fへ供給される。なお、ソレノイドバルブ503の代わりに、フロートバルブ等を用いて、機械的な動作により原水タンク500から温水タンク501への原水供給を調整するように構成しても良い。
【0054】
装置制御部Fは、上述のように、排泄物収容部Dと吸気管401aを介して接続されており、また、洗浄水供給部Eと送水管504aを介して接続されている。装置制御部F内において、吸気管401aは、弁としての吸気バルブ409、減圧部としての真空タンク408、吸気管401b、1次悪臭除去フィルタ407a、圧力スイッチ413、吸気管401c、ソレノイドバルブ6のNOポート、ソレノイドバルブ6のCOMポート、吸気管401dを経て吸入ポンプ400の吸気口402に接続されている。また、吸入ポンプ400の排気口405は、ソレノイドバルブ5のCOMポートに接続され、ソレノイドバルブ5のNOポートは、エア排出管414を介して、2次悪臭除去フィルタ407bに接続されている。
【0055】
かかる構成の下、洗浄工程においては、各種センサG,Hにより汚物を検知した後、オムツ状ケーシングA内の汚物による悪臭を除去する工程が行われる。具体的には、汚物収容タンク300内は、吸入ポンプ400の作動によって空気が吸引されて負圧に保たれ、オムツ状ケーシングA内から汚物流入管103、汚物収容タンク300、吸入ポンプ400に向かって空気が流れる。この空気は、オムツ状ケーシングA内の汚物の悪臭を伴う空気であるが、汚物収容タンク300と吸入ポンプ400との間に備えた1次悪臭除去フィルタ407aにより悪臭が除去される。1次悪臭除去フィルタ407aにより悪臭が除去されると同時に腐食性のあるガスも除去されるので、吸入ポンプ400の腐食を防止することができる。
【0056】
また、吸入ポンプ400の排気口405から2次悪臭除去フィルタ407bに向かって流れた空気は、2次悪臭除去フィルタ407bで更に悪臭を除去した後に外部へと排出される。外部へ空気を排出する際に、2次悪臭除去フィルタ407bを備えることで、悪臭の外部流出を完全に防止できると共に、1次悪臭除去フィルタ407aだけを備えたときよりも悪臭除去効果を長期に維持することができる。
【0057】
一方、送水管504aは、フィルタ507、送水管504b、加圧ポンプ600、送水管504c、T字パイプ412、ノズル管601、各種ソレノイドバルブ1,2,3,4、各種ノズル管602,603,604,605を経て、オムツ状ケーシングA内の各種ノズル104,105,202,203に接続されている。すなわち、洗浄水供給部Eから供給される洗浄水を加圧ポンプ600により加圧することで、洗浄水を各種ノズル104,105,202,203からオムツ状ケーシングA内へ噴射し得る構成となっている。フィルタ507は、加圧ポンプ600に異物が流入しないように、洗浄水中に混入する異物を除去するためのものである。
【0058】
かかる構成の下、洗浄工程においては、オムツ状ケーシングA内の汚物による悪臭を除去する工程を実行した後に、上述した大便粉砕処理を実行する。具体的には、吸入ポンプ400を動作してオムツ状ケーシングA内の吸引を維持しつつ、ソレノイドバルブ4を開き、加圧ポンプ600を動作することにより、大便用ノズル105より洗浄水を噴射して大便粉砕処理を実行する。大便粉砕処理により、粉砕された大便は洗浄水と共に排出部102へ向けて押し流され、その一部が汚物流入管103を介して汚物収容タンク300内へ吸引、収容される。
【0059】
しかし、吸入ポンプ400の吸引力だけでは、オムツ状ケーシングA内の汚物を汚物収容タンク300内へ完全に吸引収容するのは困難である。そこで、本実施形態においては、吸入ポンプ400と汚物収容タンク300との間に、吸入ポンプ400の吸引力を増大させるための真空タンク408を配置している。真空タンク408内に真空状態を形成することにより、より強い負圧を発生させてオムツ状ケーシングA内の汚物を効率良く吸引することができる構成となっている。
【0060】
具体的には、吸入ポンプ400を動作した状態で吸気バルブ409を閉じて、オムツ状ケーシングAから汚物収容タンク300への汚物の吸引を停止し、吸入ポンプ400の吸引を継続して行うことにより真空タンク408内に真空状態を形成する。この間、オムツ状ケーシングA内で大便粉砕処理により細かく粉砕された大便は、洗浄水の水圧により汚物貯留空間sへと押し流されるが、吸気バルブ409が閉じられているため排出部102から汚物流入管103へと吸引されることはない。よって、汚物貯留空間sにおいて、大便を含む洗浄水の流れが滞り、大便を含む洗浄水が上下に旋回するような渦巻き状の流れを生じる(以下、過流現象という。)。過流現象により、大便が一層細かく粉砕されて洗浄水と十分に混合されると同時に、オムツ状ケーシングA内で特に汚物が付着しやすい排出部102付近が十分に洗浄される。
【0061】
その後、真空タンク408の内部圧力を、吸入ポンプ400と真空タンク408の間に配置された圧力スイッチ413で検知し、内部圧力が最大真空圧に到達した瞬間に、吸気バルブ409を開く。この瞬間、真空タンク408に形成された最大真空圧により、過流現象によって洗浄水と十分に混合された大便は、排出部102から汚物流入管103を介して汚物収容タンク300へと一気に吸入収容されることとなる。なお、長時間の使用により、真空タンク408内に水分が溜まるため、真空タンク408の下部には、図示しない栓を配置して、この栓を抜くことにより真空タンク408内の排水ができる構造としている。
【0062】
上述のように、自動排便処理装置Kは、洗浄工程終了後に、各種ノズル104,105,202,203から空気を噴射し、人体を乾燥する構成となっている。具体的には、吸入ポンプ400の排気口405は、ソレノイドバルブ5のCOMポートに接続され、ソレノイドバルブ5のNCポートは、エア供給管410b、逆止弁411、エア供給管410c、T字パイプ412、ノズル管601、各種ソレノイドバルブ1,2,3,4、各種ノズル管602,603,604,605を経て、オムツ状ケーシングA内の各種ノズル104,105,202,203に接続されている。
【0063】
一方、吸入ポンプ400の吸気口402側には、外部エア供給フィルタ404が備えられており、外部エア供給フィルタ404は、外部エア供給管415を介して、ソレノイドバルブ6のNCポートに接続され、ソレノイドバルブ6のCOMポートは、吸気口402に接続されている。
【0064】
かかる構成により、乾燥工程においては、ソレノイドバルブ2,3、ソレノイドバルブ5,6のNCポート及び逆止弁411を開いた状態で、吸入ポンプ400を稼動することにより、外部エア供給フィルタ404から空気を取り込み、かかる空気を乾燥空気として、オムツ状ケーシングA内へ送り出す。よって、外部エア供給フィルタ404から取り込まれた空気を、乾燥空気として、尻用ノズル104及び肛門用ノズル203から送り出し、人体及びオムツ状ケーシングA内の乾燥を行うことができるようになっている。オムツ状ケーシングA内へ送り出された空気は、通気孔112からオムツ状ケーシングA外部へ排気される。また、逆止弁411は、洗浄工程の際には閉じられているので、吸入ポンプ400へ洗浄水が逆流することはない。
【0065】
なお、装置制御部Fにおいて、各種ソレノイドバルブ1,2,3,4は1ユニット化され、1つの流入口と4つの流出口で管路を形成するソレノイドバルブユニット606を構成している。ソレノイドバルブユニット606は、4つの流出口を制御回路417の制御に基づき選択的に順次開閉動作ができるように構成されている。かかる構成により、管路構成を簡易化して部品点数の削減をすることができ、また、組み立て性を向上することができる。
【0066】
また、ソレノイドバルブ5,6、外部エア供給フィルタ404、1次悪臭除去フィルタ407a、2次悪臭除去フィルタ407b、圧力スイッチ413は1ユニット化されてフィルタアセンブリ607を構成している。かかる構成により、管路形成を簡略化して部品点数の削減をすることができ、また、組み立て性を向上することができることに加えて、各種フィルタ404、407a、407bの交換作業を容易化することができる。
【0067】
この発明の実施例は以上のように構成されており、実際に使用する場合の手順及び機能のフローを説明する。
【0068】
自動排便処理装置Kは、大便、小便を各種センサG,Hの検知により判別し、各洗浄工程を自動的に行う自動排便処理モードと、患者の操作指示があった場合に行う手動排便処理モードを有している。
【0069】
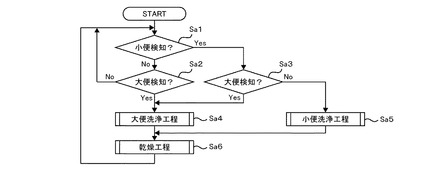
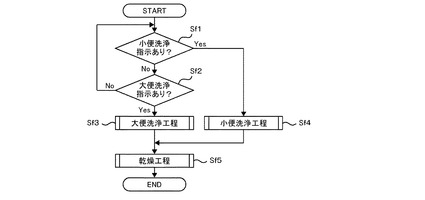
図18は、自動排便処理モード時の自動排便処理装置Kの処理手順を示すフローチャートである。図18に示すように、自動排便処理装置Kは、図示しない電源スイッチの操作により、本体の電源が投入されると、小便検知センサHの検出値に基づいて、汚物流路101に小便が存在するか否かを判断する(ステップSa1)。
【0070】
この判断の結果、小便が存在しない場合(ステップSa1:NO)、自動排便処理装置Kは、大便検知センサGの検出値に基づいて、汚物流路101に大便が存在するか否かを判断する(ステップSa2)。この判断の結果、大便が存在しない場合(ステップSa2:NO)、自動排便処理装置Kは、再度、小便が存在するか否かを判断すべく、処理手順をステップSa1に戻す。一方、大便が存在する場合(ステップSa2:YES)、すなわち、汚物流路101に大便のみが存在する場合、自動排便処理装置Kは、大便洗浄工程を実行する(ステップSa4)。
【0071】
また、ステップSa1において小便が存在する場合(ステップSa1:YES)、自動排便処理装置Kは、汚物流路101に大便が存在するか否かを判断する(ステップSa3)。この判断の結果、大便が存在する場合(ステップSa3:YES)、すなわち、汚物流路101に小便及び大便が存在する場合、自動排便処理装置Kは、大便を処理する大便洗浄工程を実行する(ステップSa4)。
【0072】
一方、自動排便処理装置Kは、大便が存在しない場合(ステップSa3:NO)、すなわち、汚物流路101に小便のみが存在する場合、小便を処理する小便洗浄工程を実行する(ステップSa5)。
【0073】
大便洗浄工程(ステップSa4)又は小便洗浄工程(ステップSa5)を終了後、自動排便処理装置Kは、人体及びオムツ状ケーシングA内の乾燥をするための乾燥工程を実行する(ステップSa6)。
【0074】
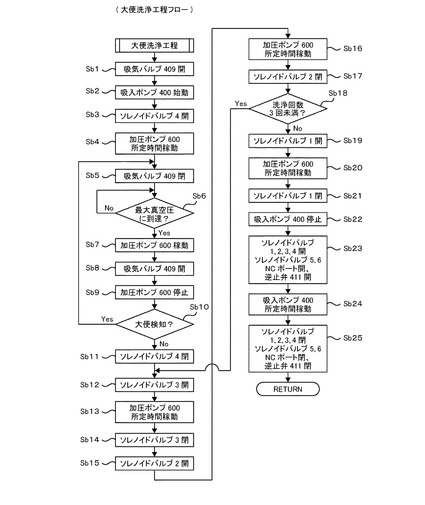
図19は、大便洗浄工程の処理手順を示すフローチャートである。自動排便処理装置Kは、初期状態において、各種ソレノイドバルブ1,2,3,4とソレノイドバルブ5,6のNCポートと、吸気バルブ409と、逆止弁411とを閉じている。また、自動排便処理装置Kは、初期状態において、ソレノイドバルブ5,6のNOポートを開けている。図19に示すように、自動排便処理装置Kは、まず、吸気バルブ409を開け(ステップSb1)、吸入ポンプ400を始動(ステップSb2)する。これにより、オムツ状ケーシングA内部の大便による臭い及び大便の一部が汚物収容タンク300に吸引される。同時にオムツ状ケーシングA内の悪臭を含む空気は、汚物流入管103、汚物収容タンク300、吸入ポンプ400に向かって流れ、吸気口402前の1次悪臭除去フィルタ407a及び排気口405後の2次悪臭除去フィルタ407bを経て悪臭が除去されてから外部へ放出される。
【0075】
次いで、ソレノイドバルブ4を開けた後に(ステップSb3)、加圧ポンプ600を所定時間だけ稼動する(ステップSb4)。これにより、温水タンク501内の温水が、大便用ノズル管605に送水されて大便用ノズル105から洗浄水として噴射され、大便粉砕処理を実行する。大便粉砕処理によって粉砕され、汚物流路101方向に押しやられた大便は、汚物貯留空間sで過流現象により洗浄水と十分に混合される(以下、過流現象による混合動作という)。
【0076】
次に、自動排便処理装置Kは、真空タンク408内を真空状態とするために吸気バルブ409を閉じて真空形成を開始する(ステップSb5)。圧力スイッチ413に基づく内部圧力の検出値が最大真空圧(例えば、600mmHg)に到達するまで待った後(ステップSb6:YES)、自動排便処理装置Kは、圧力スイッチ413からの検知信号に基づき図示しない制御装置を介して加圧ポンプ600を稼動し(ステップSb7)、吸気バルブ409を開く(ステップSb8)。この瞬間、真空タンク408に形成された最大真空圧により、過流現象による混合動作後の大便は、排出部102から汚物流入管103を介して汚物収容タンク300に一気に吸入収容される(以下、真空吸入動作という)。
【0077】
そして、自動排便処理装置Kは、加圧ポンプ600を停止し(ステップSb9)、再び大便検知センサGの検出値に基づいて、汚物流路101内に残便がないか否かを判断する(ステップSb10)。この判断の結果、残便が存在する場合(ステップSb10:YES)、自動排便処理装置Kは、再度、過流現象による混合動作及び真空吸入動作を繰り返すべく、処理手順をステップSb5に戻す。そして、自動排便処理装置Kは、過流現象による混合動作及び真空吸入動作を、大便検知センサGが大便を検知することがなくなるまで繰り返す。
【0078】
次に、汚物流路101内に残便が検知されなくなると(ステップSb10:NO)、自動排便処理装置Kは、ソレノイドバルブ4を閉じ(ステップSb11)、次いで、ソレノイドバルブ3を開け(ステップSb12)、加圧ポンプ600を所定の時間だけ稼動する(ステップSb13)。これにより、温水タンク501から温水が、尻用ノズル管604に送水されて尻用ノズル104から洗浄水として噴射され、患者の尻付近に付着した大便を洗浄する(以下、お尻の洗浄動作という)。
【0079】
次に、自動排便処理装置Kは、ソレノイドバルブ3を閉じ(ステップSb14)、次いで、ソレノイドバルブ2を開け(ステップSb15)、加圧ポンプ600を所定の時間だけ稼動する(ステップSb16)。これにより、温水タンク501から温水が、肛門用ノズル管603に送水されて肛門用ノズル203から洗浄水として噴射され、患者の肛門付近に付着した大便を洗浄する(以下、肛門の洗浄動作という)。さらに、自動排便処理装置Kは、お尻の洗浄動作及び肛門の洗浄動作を洗浄回数が3回に到達するまで繰り返す(ステップSb18:YES)。これにより、患者のお尻及び肛門付近の洗浄を完璧に遂行することが可能となる。
【0080】
次に、洗浄回数が3回に到達すると(ステップSb18:NO)、自動排便処理装置Kは、ソレノイドバルブ1を開け(ステップSb19)、加圧ポンプ600を所定時間だけ稼動する(ステップSb20)。これにより、温水タンク501から温水が、ビデ用ノズル管602に送水されてビデ用ノズル202から洗浄水として噴射され、患者の陰部付近に付着した大便を洗浄する(以下、ビデの洗浄動作という)。
【0081】
次に、自動排便処理装置Kは、ソレノイドバルブ1を閉じ(ステップSb21)、吸入ポンプ400を停止し(ステップSb22)、次いで、各種ソレノイドバルブ1,2,3,4、ソレノイドバルブ5,6のNCポート及び逆止弁411を開け(ステップSb23)、吸入ポンプ400を所定の時間だけ稼動する(ステップSb24)。これにより、後述の乾燥工程(ステップSa6)へ進む前に、吸入ポンプ400を稼動して、ビデ用ノズル管602、肛門用ノズル管603、尻用ノズル管604、大便用ノズル管605の各ノズル管内へ外部エア供給フィルタ404から取り込んだ空気を送風し水分を除去する(以下、ノズル管内の水分除去動作という)。
【0082】
そして、自動排便処理装置Kは、各種ソレノイドバルブ1,2,3,4、ソレノイドバルブ5,6のNCポート及び逆止弁411を閉じ(ステップSb25)、大便洗浄工程を終了する。
【0083】
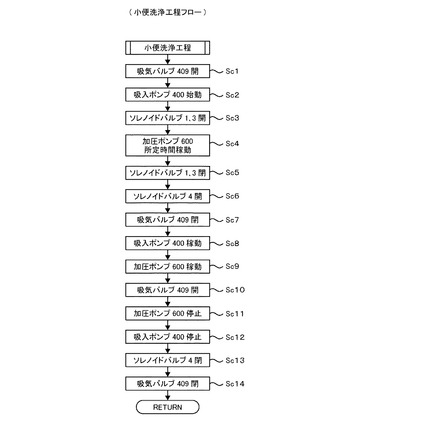
図20は、小便洗浄工程の処理手順を示すフローチャートである。図20に示すように、自動排便処理装置Kは、まず、吸気バルブ409を開き(ステップSc1)、吸入ポンプ400を始動し(ステップSc2)、次いで、ソレノイドバルブ1,3を開いた後(ステップSc3)、加圧ポンプ600を所定時間だけ稼動する(ステップSc4)。これにより、小便が汚物収容タンク300に吸引され、同時に、お尻の洗浄動作及びビデの洗浄動作が実行される。
【0084】
次に、自動排便処理装置Kは、ソレノイドバルブ1,3を閉じ(ステップSc5)、ソレノイドバルブ4を開き(ステップSc6)、次いで、吸気バルブ409を閉じた後(ステップSc7)、吸入ポンプ400を稼動する(ステップSc8)。これにより、真空タンク408内の真空形成を開始する。
【0085】
そして、所定時間経過後に、自動排便処理装置Kは、加圧ポンプ600を稼動し、原水タンク500中の温水タンク501から送水された温水を、大便用ノズル管605を介して大便用ノズル105から洗浄水として噴射し、小便を汚物流路101方向に押しやる(ステップSc9)。そして、ほぼ同時に、吸気バルブ409を開く(ステップSc10)。この瞬間、真空タンク408に形成された最大真空圧により、小便は、排出部102から汚物流入管103を介して汚物収容タンク300に一気に吸入収容される。
【0086】
その後、自動排便処理装置Kは、加圧ポンプ600を停止し(ステップSc11)、吸入ポンプ400を停止し(ステップSc12)、次いで、ソレノイドバルブ4を閉じた後(ステップSc13)、吸気バルブ409を閉じ(ステップSc14)、小便洗浄工程を終了する。
【0087】
なお、自動排便処理装置Kは、上述の大便洗浄工程及び小便洗浄工程において、1次悪臭除去フィルタ407a、及び2次悪臭除去フィルタ407bを介して汚物収容タンク300に吸入収容される汚物から発する悪臭が可及的に吸入ポンプ400外に排出されないようにしている。
【0088】
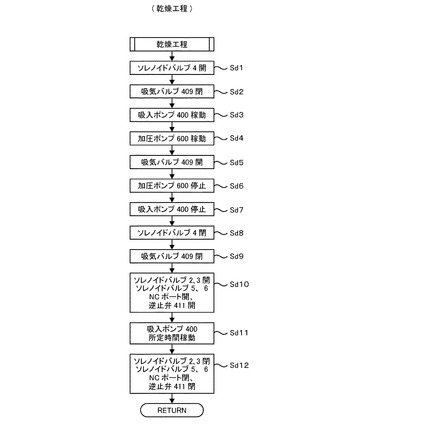
図21は、乾燥工程の処理手順を示すフローチャートである。図21に示すように、自動排便処理装置Kは、まず、ソレノイドバルブ4を開き(ステップSd1)、次いで、吸気バルブ409を閉じた後(ステップSd2)、吸入ポンプ400を稼動し、真空タンク408内の真空形成を開始する(ステップSd3)。そして、所定時間経過後に、自動排便処理装置Kは、加圧ポンプ600を稼動し、原水タンク500中の温水タンク501から送水された温水を、大便用ノズル管605を介して大便用ノズル105から噴射する(ステップSd4)。
【0089】
かかる噴射は、大便用ノズル管605から大便用ノズル105の間に洗浄水を充填し、次回の洗浄工程の際に、大便用ノズル105から即座に洗浄水を噴射することを可能とするための動作(以下、充填動作という。)である。
【0090】
次に、自動排便処理装置Kは、吸気バルブ409を開き(ステップSd5)、その瞬間に、真空タンク408に形成された最大真空圧により、充填動作により噴射された温水は、排出部102から汚物流入管103を介して汚物収容タンク300に一気に吸入収容される。
【0091】
次に自動排便処理装置Kは、加圧ポンプ600を停止し(ステップSd6)、次いで、吸入ポンプ400を停止した後に(ステップSd7)、ソレノイドバルブ4を閉じる(ステップSd8)。その後、吸気バルブ409を閉じ(ステップSd9)、次いで、ソレノイドバルブ2,3、ソレノイドバルブ5,6のNCポート及び逆止弁411を開いた後(ステップSd10)、吸入ポンプ400を所定時間稼動する(ステップSd11)。吸入ポンプ400を所定時間だけ稼動すると、ソレノイドバルブ2,3、ソレノイドバルブ5,6のNCポート、及び逆止弁411を閉じ(ステップSd12)、乾燥工程を終了する。これにより、外部エア供給フィルタ404から取り込まれた空気を、乾燥空気として、尻用ノズル104及び肛門用ノズル203から送り出し、人体及びオムツ状ケーシングA内の乾燥を行う。
【0092】
そして、図18に示すように、自動排便処理装置Kは、一連の処理により、人体及びオムツ状ケーシングA内の洗浄工程(ステップSa2又はステップSa3)及び乾燥工程(ステップSa6)を終了すると、再度、大便及び小便の検知を実行すべく、処理手順をステップSa1に戻す。
【0093】
ところで、上述したように、本実施形態の自動排便処理装置Kは、動作モードとして自動排便処理モードの他に、患者の操作指示があった場合に行う手動排便処理モードを有する。この手動排便処理モードにおいては、自動排便処理装置Kは、大便検知センサG及び小便検知センサHによるセンシングを行わず、患者から大便洗浄工程及び小便洗浄工程のいずれか一方を行うための操作指示を受け付けた場合にだけ、排便処理を実行する。なお、患者は、自動排便処理装置Kの所定の場所に設けられた操作パネルや、リモートコントローラを用いて操作指示を行う。以下、この手動排便処理モード時の動作について説明する。
【0094】
図22は、手動排便処理モード時の自動排便処理装置Kの処理手順を示すフローチャートである。図22に示すように、自動排便処理装置Kは、小便洗浄指示があった場合には(ステップSf1:YES)、上述した自動排便処理モードの小便洗浄工程と同じ手順にて小便洗浄工程を実行する(ステップSf4)。また、小便洗浄指示がなく(ステップSf1:NO)、大便洗浄指示があった場合には(ステップSf2:YES)、上述した自動排便処理モードの大便洗浄工程と同じ手順にて大便洗浄工程を実行する(ステップSf3)。一方、小便洗浄指示がなく(ステップSf1:NO)、かつ、大便洗浄指示もない場合には(ステップSf1:NO)、指示があるまで待機する。
【0095】
そして、大便洗浄工程(ステップSf3)又は小便洗浄工程(ステップSf4)を終了後、自動排便処理装置Kは、オムツ状ケーシングA内の乾燥をするために、上述した自動排便処理モードの乾燥工程と同じ手順にて乾燥工程を実行し(ステップSf5)、手動排便処理モードを終了する。
【0096】
以上、本発明の実施の形態のいくつかを図面に基づいて詳細に説明したが、これらは例示であり、発明の開示の欄に記載の態様を始めとして、当業者の知識に基づいて種々の変形、改良を施した他の形態で本発明を実施することが可能である。
【0097】
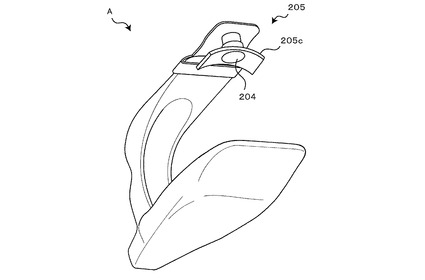
例えば、図23に示すように、自動固定装置205の押圧部205cの表面に、人体の腹部をマッサージするためのマッサージ器204を配置しても良い。マッサージ器204は、表面をシリコンパッドで形成し、低周波出力により腸への刺激を行って排便を促すものであり、図示しない低周波発生器から導いたプレート状の治療導子から成るマッサージ器204を押圧部205cの表面に貼付することにより構成する。マッサージ器204で人体腹部をマッサージすることにより、腸が刺激され排便を促すことが可能となる。
【0098】
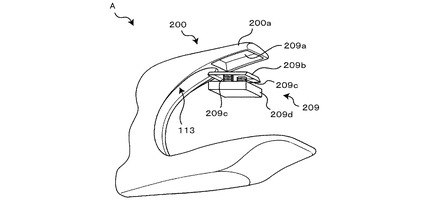
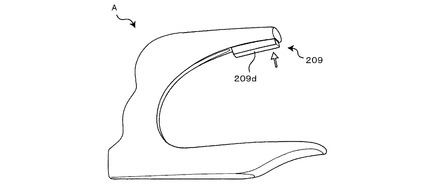
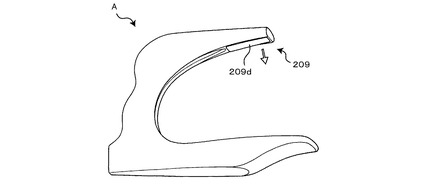
また、自動固定装置205の代わりに、図24に示すように、埋込式自動固定装置209を適用して、人体とオムツ状ケーシングAを固定するように構成しても良い。埋込式自動固定装置209は、先端部200aの内側で前面凹部113の上部に設けられた取付凹部209aに設置される。埋込式自動固定装置209は、埋込式自動固定装置209を取付凹部209aに取り付けるための取付カバー209bと、人体の押し度合いを調整する一対のスプリング209c、209cと、人体の腹部に押圧して固定するための押圧部209dを有している。埋込式自動固定装置209は、押圧部209dをスプリング209c、209cを介して取付カバー209bに嵌合することにより組み立てられ、取付カバー209bを、取付凹部209aに接着することにより固定される。患者がオムツ状ケーシングAを着用する際には、図25及び図26に示すように、押圧部209dが、スプリング209c、209cの弾性力に基づき図中に示す矢印の方向に上下動し、人体に押圧されるので、オムツ状ケーシングAと人体との自動固定が可能となる。押圧部209dは、ABS樹脂から成り、表面仕上げとして、触感及びクッション性の良好な素材、例えば、ウレタンなどの素材を発泡して成形される。
【0099】
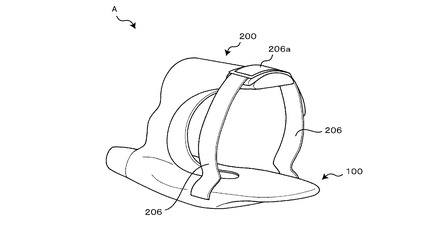
また、自動固定装置205の代わりに、図27に示す、シートベルト206,206を適用して、人体とオムツ状ケーシングAを固定するように構成しても良い。各シートベルト206は、その一端を支持プレート部100の両側面に取り付けられ、人体の腰部を両側から囲むように装着され、その他端が立ち上がり部200の前面において、バックル206aで固定される。バックル206aは、使用者の体型に合わせて、シートベルト206の長さを調整できるように構成されている。
【0100】
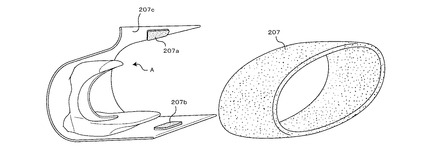
また、自動固定装置205の代わりに、図28に示す、腹巻207、面ファスナ207a,207b、カバー207cを用いて、人体とオムツ状ケーシングAを固定するように構成しても良い。カバー207cは、人体腹部側及び腰部側に面ファスナ207a,207bを有し、オムツ状ケーシングAを覆うように構成されている。使用者は、腹巻207を腰臀部に装着した状態でオムツ状ケーシングAを装着し、面ファスナ207a,207bで腹巻207を固定することにより、人体とオムツ状ケーシングAが固定される。
【0101】
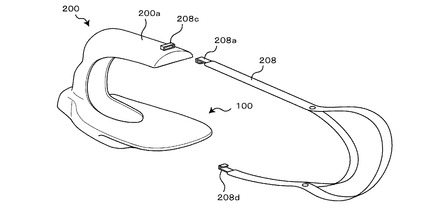
また、自動固定装置205の代わりに、図29に示すように、サスペンダー208を適用して、人体とオムツ状ケーシングAを固定するように構成しても良い。サスペンダー208は、その両端に開形状のフック208a、208bを備え、先端部200aの外側に設けられた固定部208cと支持プレート部100の外側に設けられた固定部208cと同形状の図示しない固定部とに、フック208a,208bをそれぞれ掛止することで固定されるように構成されている。患者がオムツ状ケーシングAを装着する際は、まずオムツ状ケーシングAを身体に着用し、両肩部にサスペンダー208を掛けた後に、固定部208cと固定部208dとに、フック208a,208bをそれぞれ掛止することにより、人体とオムツ状ケーシングAが固定される。
【0102】
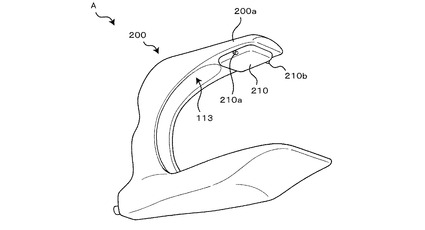
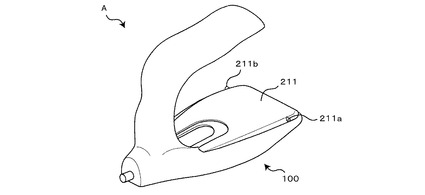
また、自動固定装置205の代わりに、図30及び図31に示すように、中空状のチューブである前面チューブ210及び後面チューブ211を適用して、人体とオムツ状ケーシングAを固定するように構成しても良い。前面チューブ210は、人体の腹部を固定するためのもので先端部200aの内側で前面凹部113の上部に設置され、また、後面チューブ211は、人体の腰臀部を固定するためのもので支持プレート部100の内側表面に設置される。
【0103】
前面チューブ210は、一方の側面に配設された空気圧入口210aと、空気圧入口210aの反対側の側面に配設された空気排出口210bとを備えており、後面チューブ211も同様に、空気圧入口211aと、空気排出口211bとを備えている。また、空気圧入口210a及び211aは、図32に示すように、ソレノイドバルブユニット606に増設されたソレノイドバルブ7,8にそれぞれ接続されている。
【0104】
かかる構成の下で、ソレノイドバルブ5,6のそれぞれのNCポート、逆止弁411、ソレノイドバルブ7,8を開けた状態で、吸入ポンプ400を稼動することにより、外部エア供給フィルタ404から空気を取り込む。かかる空気は、ソレノイドバルブ7,8を介して、それぞれ空気圧入口210a、211aに供給されて、前面チューブ210及び後面チューブ211が膨張する。よって、膨張した前面チューブ210及び後面チューブ211がそれぞれ腹部と腰部に密着挟圧されて、人体とオムツ状ケーシングAとの固定が可能となる。
【0105】
人体からオムツ状ケーシングAを取り外す際には、空気排出口210b、211bに取り付けられた図示しない弁を開放して排気し、前面チューブ210及び後面チューブ211を収縮させる。なお、前面チューブ210又は後面チューブ211のうちいずれか一方のみを設置して、人体とオムツ状ケーシングAとの固定を行う構造としても良い。
【0106】
また、図33に示すようにオムツ状ケーシングAに自動固定装置205を装着せずに、立ち上がり部200の内部に図示しない弾性材を内挿し、先端部200aが予め内側に傾倒するように構成しても良い。かかる構成により、患者がオムツ状ケーシングAを着用する際には、先端部200aをZ方向に開くと、立ち上がり部200内の図示しない弾性材の弾性力により先端部200aが腹部を押圧し、人体とオムツ状ケーシングAとの固定が可能となる。
【0107】
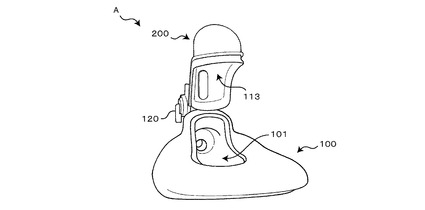
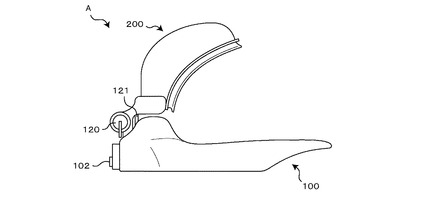
また、図34及び図35に示すように、オムツ状ケーシングAにおいて、支持プレート部100と立ち上がり部200とを分離することにより、人体とオムツ状ケーシングAを固定するように構成しても良い。オムツ状ケーシングAは、支持プレート部100と、支持プレート部100の後端に設けられたヒンジ部120と、ヒンジ部120回りに回動自在となるように設置された立ち上がり部200とを有している。
【0108】
ヒンジ部120の内部には、図示しないネジ締結部が備えられ、ヒンジ部120を右ネジ方向に回すことにより、立ち上がり部200の位置の固定ができるように構成されている。支持プレート部100に設けられた汚物流路101は、立ち上がり部200の前面凹部113と分離されており、汚物流路101は大便を処理し、前面凹部113は小便を処理するように構成されている。前面凹部113の所定の箇所には小便を排出する小便排出用ホース121が接続され、この小便排出用ホース121は、汚物流路101と所定の箇所で接続されている。
【0109】
かかる構成の下で、患者がオムツ状ケーシングAを着用する際には、ヒンジ部120を緩めてから支持プレート部100に腰臀部を載置した状態で、立ち上がり部200をヒンジ部120周りに回動して腹部と密着させた後、ヒンジ部120を右ネジ方向に回して固定することにより、人体とオムツ状ケーシングAとの固定が可能となる。
【0110】
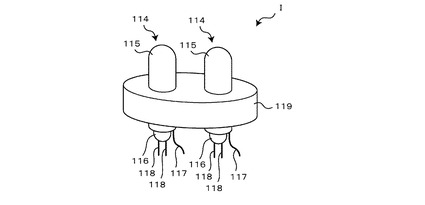
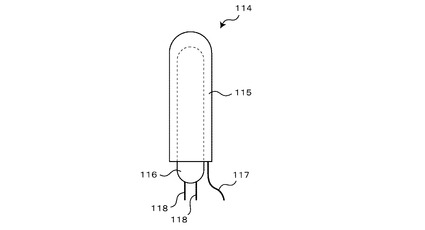
また、大便検知センサG、小便検知センサHでそれぞれ大便、小便を検知するように構成する代わりに、図36に示すように、大便と小便の検知を同時に実行し得る大小便検知センサIを採用しても良い。図36は、大小便検知センサIの概略図である。大小便検知センサIは、図4に示す上述した小便検知センサHと同じ位置に設置され、一対のセンサユニット114,114を有しており、センサユニット114,114は、所定の間隔を置いて絶縁体119により固定支持されている。
【0111】
各センサユニット114は、図37に示すように、一対のリード線118,118を有する温度センサ116と、温度センサ116の外縁を覆う導電体115とを備えており、導電体115は、一本のリード線117を有している。温度センサ116としては、例えばサーミスタ等が用いられ、導電体115としては、例えば導電性ペイント、炭素ゴム、ステンレス等が用いられる。導電体115は、温度センサ116の測定精度に影響を与えない程度の所定の厚みを持つように構成されており、またリード線118,118とリード線117とは、互いに接触しないように構成されている。すなわち、大小便検知センサIは、図36に示すように、2対のリード線118,118,118,118と一対のリード線117,117を有している。
【0112】
リード線118,118,118,118は、制御回路417と接続されており、制御回路417から電流を流すように設定されている。温度センサ116の抵抗値は、温度変化に伴い変動するので、制御回路417は、温度センサ116の抵抗値の変化に伴う電流値の変化に基づき温度を検知するように構成されている。かかる構成の下、温度センサ116が検知する温度に対して、例えば、体温に近い温度をしきい値として設定することにより、体温に近い大便及び/又は小便の温度を検知してその存在を検知することができる
リード線117,117は、電流形成手段416を介して制御回路417に接続されており、制御回路417の制御により電流形成手段416からいずれか一方だけに電流を流すように構成されている。よって、制御回路417は、導電体115,115の間が洗浄水又は小便によって通電した際の電流値に基づき水分を検知できる構成となっている。洗浄水と小便との区別は、上述した小便検知センサHと同様であるのでここでは説明を省略する。
【0113】
かかる構成により、大小便検知センサIは、温度センサ116,116が、所定の温度を検知し且つ導電体115,115の間に流れた電流値が所定の値であるときに小便を検知することができる。一方、温度検知手段116,116が所定の温度を検知し且つ導電体115,115の間に流れた電流値が所定の値でないときに大便を検知することができる。
【0114】
したがって、大小便検知センサIは、大便と小便を確実に区別して判断することができるので、大便センサGと小便センサHを併用する必要がなく、組み立て性を向上することができ、また、電気配線を簡易化することができる。
【0115】
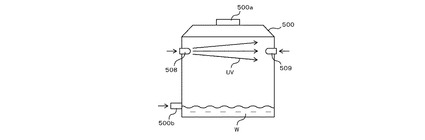
図38及び図39に示すように、原水タンク500内では原水Wの水位センシングと共に殺菌処理を施すことができる構成としても良い。図38及び図39は、原水タンク500の内部構造を示した模式図である。原水タンク500は、その内壁面上部の所定箇所に配設された紫外線LED508と、紫外線LED508と対向する位置に配設されたフォトトランジスタ509とを備えている。紫外線LED508及びフォトトランジスタ509は、制御回路417に接続されている。制御回路417は、紫外線LED508から所定の時間間隔で紫外線UVを発信し、対向するフォトトランジスタ509で紫外線UVを受信した旨の信号に基づき、原水Wの水位センシングを行うようになっている。
【0116】
また、原水タンク500の上部には、原水Wを注水するための注水口500aが備えられ、原水タンク500下部には、出水口500bが備えられている。注水口500aは、図示しない電磁弁を介して水道の蛇口に接続されており、フォトトランジスタ509に検知信号に基づく制御回路417の制御により電磁弁の開閉を行うことで水道からの注水ができるようになっている。出水口500bは、図1に示したソレノイドバルブ503と接続されている。
【0117】
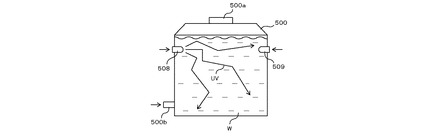
図38に示すように、原水タンク500内の原水Wが所定の水位に満たない間は、フォトトランジスタ509は、受信した紫外線UVに基づく所定の電圧値(例えば4.1V以上)を検知し、その旨の信号を制御回路417に送信する。かかる信号を受信した制御回路417は、図示しない電磁弁を開き、原水Wが注水口500aから原水タンク500内に供給される。原水タンク500内の原水Wが所定の水位に到達した場合は、図39に示すように、紫外線UVは原水W中で乱反射するので、フォトトランジスタ509を介して制御回路417が検知する電圧値が減少する(例えば、3.4V以下)。原水タンク500内の原水が所定の水位に到達した場合は、原水タンク500は、制御回路417の制御に基づき原水Wの供給を停止すると共に紫外線LED508から連続的に紫外線UVを発信し原水Wの殺菌処理を行う。
【0118】
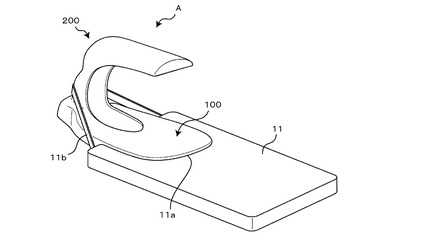
また、図40に示すように、オムツ状ケーシングAの使用時に、オムツ状ケーシングAとセットになった寝床用マット11を用いても良い。寝床用マット11は、オムツ状ケーシングAを長時間着用する際の腰の疲れを防ぐためのもので、患者が臀部を支持プレート部100上に載置して横臥した際に、患者の腰部より上半身側を支持できるように略方形状に構成されている。寝床用マット11は、支持プレート部100と略同一の厚みを有し、側面に支持プレート部100の表面形状に応じて形成された凹部11aと、凹部11aが形成された側の端部において、凹部11aの両側に、その各端部と固定されたベルト11bとを備えている。寝床用マット11は、凹部11aに支持プレート部100を嵌合した上で、ベルト11bを立ち上がり部200の背面側に掛けることによりオムツ状ケーシングAに固定される。
【0119】
寝床用マット11の材質は、患者の腰部より上半身の負担を最小限に抑えるために低反発性の素材、例えば、ラテックスなどが用いられる。寝床用マット11の表面の所定箇所には、図示しない通気用穴が数箇所穿たれており、通気性を向上して湿疹、床擦れなどの各種肌トラブルを防止するように構成されている。また、オムツ状ケーシングAと人体が接触する部分の触感及び吸湿性を向上するために、オムツ状ケーシングAの外表面を繊維材で作られたカバーで被覆しても良い。
【0120】
上述の本実施形態においては、図1に示すように、外部エア供給フィルタ404から取り込んだ常温の空気を乾燥空気として各種ノズル104,105,202,203から噴射する構成としているが、加温された空気を噴射する構成としても良い。具体的には、各種ノズル管602,603,604,605に図示しない定温ヒーターを密着させて、定温ヒーターにより加温された空気を各種ノズル104,105,202,203から噴射する構成としても良い。
【0121】
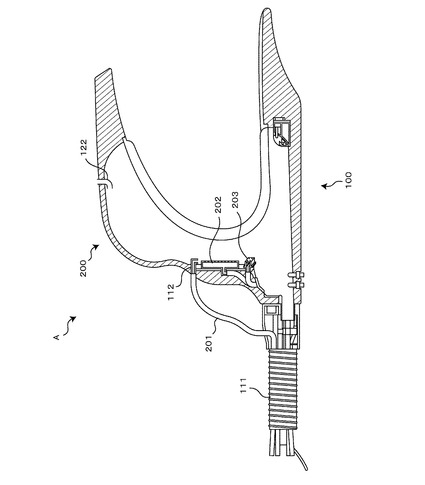
また、上記の構成に加えて、加温された乾燥空気を噴射するための流路を別途構成しても良い。具体的には、オムツ状ケーシングAは、図41に示すように、加温された乾燥空気を送風するための乾燥空気用ノズル管201を備えた構成としても良い。乾燥空気用ノズル管201の一方の端部は、通気孔112に接続されており、他方の端部は、外観処理ホース111内に挿通している。また、外観処理ホース111は、図示しない管ヒーター付流路を介して吸入ポンプ400(図1参照)の排気口405に接続されている。吸入ポンプ400から送風される空気は、図示しない管ヒーター付流路を介して加温された後、外観処理ホース111、乾燥空気用ノズル管201を経て、通気孔112からオムツ状ケーシングA内へ乾燥空気として送風される。乾燥空気として送風された空気は、オムツ状ケーシングAの任意の箇所に設けられた通気孔122より外気へと放出される。かかる構成により、オムツ状ケーシングA内に、加温された乾燥空気を送風することができるので、オムツ状ケーシングA内の乾燥効果を向上することができる。
【図面の簡単な説明】
【0122】
【図1】本発明の実施形態にかかる自動排便処理装置の構成を示す図である。
【図2】オムツ状ケーシングの外観斜視図である。
【図3】オムツ状ケーシングの正面図である。
【図4】オムツ状ケーシングの側断面図である。
【図5】自動固定装置の分解斜視図である。
【図6】オムツ状ケーシングの内部構造の斜視図である。
【図7】尻用ノズル及び大便用ノズルの斜視図である。
【図8】ビデ用ノズルの構造の斜視図である。
【図9】肛門用ノズルの構造の斜視図である。
【図10】小便検知センサを用いて、洗浄水として使用可能な各種の水及び小便について電流値を測定した実験結果である。
【図11】重量センサの分解斜視図である。
【図12】重量センサの構造を示す拡大図である。
【図13】タンク蓋体からホース連結部を取り外した状態を示す図である。
【図14】タンク蓋体にホース連結部を接続した状態を示す図である。
【図15】ホース連結部の上部の構造の外観斜視図である。
【図16】ホース連結部の上部の構造の側面図である。
【図17】タンク蓋体の拡大斜視図である。
【図18】自動排便処理装置の自動排便処理モード時の処理手順を示すフローチャートである。
【図19】大便洗浄工程の処理手順を示すフローチャートである。
【図20】小便洗浄工程の処理手順を示すフローチャートである。
【図21】乾燥工程の処理手順を示すフローチャートである。
【図22】自動排便処理装置の手動排便処理モード時の処理手順を示すフローチャートである。
【図23】マッサージ器の構造を示す斜視図である。
【図24】埋込式自動固定装置の構造を示す分解斜視図である。
【図25】埋込式自動固定装置の押圧部が突出している状態を示す斜視図である。
【図26】埋込式自動固定装置の押圧部が人体腹部を押圧している状態を示す斜視図である。
【図27】シートベルトの構造を示す斜視図である。
【図28】腹巻、面ファスナ,カバーを用いて人体とオムツ状ケーシングとを固定する方式を示す斜視図である。
【図29】サスペンダーの構造を示す斜視図である。
【図30】前面チューブの構造を示す斜視図である。
【図31】後面チューブの構造を示す斜視図である。
【図32】前面チューブ及び後面チューブを膨張させるための空気を送り出すための流路について説明するための図である。
【図33】立ち上がり部の内部に弾性材を内挿した場合に先端部が傾倒態様を示す側面図である。
【図34】人体とオムツ状ケーシングを固定するための支持プレート部と立ち上がり部とを分離した構造について説明するための斜視図である。
【図35】図34に示した側面図である。
【図36】大小便検知センサの斜視図である。
【図37】センサユニットの斜視図である。
【図38】紫外線LED及びフォトトランジスタで原水タンクの原水の水位を検知している状態を示す概略図である。
【図39】紫外線LEDで原水タンクの原水の殺菌処理を施している状態を示す概略図である。
【図40】オムツ状ケーシングと寝床用マットとを併用している状態を示す斜視図である。
【図41】乾燥空気用ノズル管の構造を示す側断面図である。
【符号の説明】
【0123】
1 ビデ用ノズル管602に設けたソレノイドバルブ
2 肛門用ノズル管603に設けたソレノイドバルブ
3 尻用ノズル管604に設けたソレノイドバルブ
4 大便用ノズル管605に設けたソレノイドバルブ
1〜4 ユニット化した弁
5 エア排出管414とエア供給管410bの兼用で設けたソレノイドバルブ
6 外部エア供給管415と吸気管401cとの兼用で設けたソレノイドバルブ
100 支持プレート部
101 汚物流路
102 排出部
103 汚物流入管
104 尻用ノズル
105 大便用ノズル
104,105,202,203 洗浄手段
106 発光部
107 受光部
108 受信部
109 電極
110 防水用シール
111 外観処理ホース
112 通気孔
113 前面凹部
116 温度検知手段
200 立ち上がり部
201 乾燥空気用ノズル管
202 ビデ用ノズル
203 肛門用ノズル
204 マッサージ器
205 自動固定装置
300 汚物収容タンク
302 重量センサ
303 ホース連結部
304 タンク蓋体
400 吸入ポンプ
404 外部エア供給フイルタ
414 エア排出管
407a 1次悪臭除去フィルタ
407b 2次悪臭除去フィルタ
408 減圧部
409 弁
410a エア供給管
410b エア供給管
410c エア供給管
411 逆止弁
412 T字パイプ
413 圧力スイッチ
414 エア排出管
415 外部エア供給管
416 電流形成手段
417 制御回路
500 原水タンク
501 温水タンク
503 ソレノイドバルブ
600 加圧ポンプ
601 ノズル管
602 ビデ用ノズル管
603 肛門用ノズル管
604 尻用ノズル管
605 大便用ノズル管
606 ソレノイドバルブユニット
607 フィルタアセンブリ
A オムツ状ケーシング
B オムツフレーム
B1 支持フレーム
B2 縦フレーム
C 本体部
D 排泄物収容部
E 洗浄水供給部
F 装置制御部
G 大便検知センサ
H 小便検知センサ
I 大小便検知センサ
K 自動排便処理装置
G,H 検知手段
s 汚物貯留空間
【技術分野】
【0001】
本発明は、寝たきりの患者や老人等が寝たままで他人の介助無しに用便を処理できる自動排便処理装置に関する。
【背景技術】
【0002】
従来、寝たきりの患者や老人等が寝たままで他人の介助無しに用便をしてその処理をも行えるようにするオムツや装置は種々考案されている。例えば、〔特許文献1〕には側面視略L字状のオムツ状ケーシングに大便センサ、小便センサと共に各種ノズルを備えた技術が開示されている。
【0003】
この排便処理技術は、用便する場合は、まず患者等がオムツ状ケーシングの立ち上がり部を人体股間で挟圧しながら腰臀部をオムツ状ケーシング上に載置し、用便後は、センサで排泄物を感知して自動的に各種ノズルから洗浄水を噴出して局所及びオムツ状ケーシング内を洗浄し、排泄物は排出部から外部に排出し汚物流入管を介して本体部に備えられた汚物収容タンクへ吸入・収容するものであり、自動的に寝たきりの患者の排便処理が行えるようにしたものである。
【特許文献1】特開平8−322868
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかし、これら従来の排便処理技術は、汚物収容タンクの密閉状態を検知する手段を有しておらず、汚物収容タンクの開口部と汚物流入管との接続状態が悪く、汚物収容タンクの密閉状態が確保されていなくても、本体部が動作してしまう場合があり、かかる場合、オムツ状ケーシング内の排泄物を外部へと十分に吸入・排出することができないばかりか、汚物収容タンク内から排泄物やその臭いが外部に漏れるおそれがあった。
【0005】
そこで、本願発明は、汚物収容タンクの密閉状態を検知することで本体部の誤動作を防止し、的確な汚物排出及び洗浄動作を実現し得る自動排便処理装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
請求項1に記載の発明は、人体の排泄部位を覆うように装着するオムツ状ケーシングと、前記オムツ状ケーシングに配設され、流体を射出して前記オムツ状ケーシングに排泄された排泄物を前記オムツ状ケーシングから排出し、前記オムツ状ケーシングの洗浄を行うための洗浄手段とを備えた自動排便処理装置において、前記オムツ状ケーシングから排出された排泄物を前記流体とともに収容する汚物収容部と、前記オムツ状ケーシングから排出された排泄物を前記流体とともに前記汚物収容部に導く連結部材と、前記汚物収容部を閉塞するための蓋体と、前記連結部材に接続され、前記蓋体に装着される装着部と、前記装着部に設けられた複数の電極とを有し、前記蓋体は、前記装着部が所定の態様で装着された状態で前記装着部に係合して固定するとともに前記複数の電極同士を導通させる固定部材を有し、前記固定部材が前記複数の電極同士を導通させると前記装着部が前記所定の態様で装着された状態で前記蓋体に固定されたことを検知する検知手段を有することを特徴とする。
【0007】
請求項2に記載の発明は、請求項2に記載の発明は、請求項1記載の自動排便処理装置において、前記蓋体と前記装着部とは、互いに所定の態位を占めるときにのみ前記所定の態様で装着されることを特徴とする。
【0008】
請求項3に記載の発明は、請求項1又は2記載の自動排便処理装置において、前記蓋体は、前記汚物収容部に螺合して閉塞することを特徴とする。
【0009】
請求項4に記載の発明は、請求項1ないし3のいずれか1つに記載の自動排便処理装置において、前記汚物収容部の重量を検知する重量検知手段を有し、前記重量検知手段は、前記汚物収容部を変位可能に弾性的に支持する弾性部材と、前記汚物収容部の重量に応じた変位を検知する変位検知手段とを有することを特徴とする。
【発明の効果】
【0010】
請求項1に記載の発明によれば、オムツ状ケーシングから排出された排泄物を流体とともに収容する汚物収容部と、オムツ状ケーシングから排出された排泄物を流体とともに汚物収容部に導く連結部材と、汚物収容部を閉塞するための蓋体とを備え、連結部材に接続され、蓋体に装着される装着部と、装着部に設けられた複数の電極とを有し、蓋体は、装着部が所定の態様で装着された状態で装着部に係合して固定するとともに複数の電極同士を導通させる固定部材を有し、固定部材が複数の電極同士を導通させると装着部が所定の態様で装着された状態で蓋体に固定されたことを検知する検知手段を有するので、汚物収容タンク内の密閉状態が確保されていない場合に、本体部が動作することを防止し、また、汚物収容タンク内からは排泄物やその臭いが外部に漏れることを防止することができる。
【0011】
請求項2に記載の発明によれば、蓋体と装着部とは、互いに所定の態位を占めるときにのみ所定の態様で装着されるので、蓋体と装着部は、その隙間の無い状態で装着されることとなり、汚物収容部からの排泄物の漏れを防ぐことができる。
【0012】
請求項3に記載の発明によれば、蓋体は、汚物収容部に螺合して閉塞するので、容易な構造で汚物収容部を閉塞することができ、また、汚物収容部内から排泄物を捨てる際における蓋体の取り外しも容易となる。
【0013】
請求項4に記載の発明によれば、汚物収容部の重量を検知する重量検知手段を有し、重量検知手段は、汚物収容部を変位可能に弾性的に支持する弾性部材と、汚物収容部の重量に応じた変位を検知する変位検知手段とを有するので、汚物収容部の重量に応じて弾性部材が伸縮し、変位検知手段が汚物収容部との間の距離を検知して汚物収容部の重量を確実に検知することができ、汚物収容部内が排泄物で満たされた際に、その交換時期を知らせることができる。
【発明を実施するための最良の形態】
【0014】
以下、図面を参照して本発明の実施の形態について説明する。図1は、本発明の実施の形態にかかる自動排便処理装置Kの構成を示す図である。図1に示すように、自動排便処理装置Kは、患者によって装着されるオムツ状ケーシングAと、オムツ状ケーシングA内部の排泄物または汚水を吸引し蓄積する本体部Cと、本体部Cとオムツ状ケーシングAとを接続する外観処理ホース111とを備えている。外観処理ホース111の内部には、汚物を吸入搬送するための連結部材としての汚物流入管103、及び、洗浄水を送水するための後述する各種ノズル管602,603,604,605が挿通されている。本体部Cは、制御回路417を有しており、制御回路417における電気的制御により、オムツ状ケーシングA内の排泄物及び汚水は、汚物流入管103を通して本体部Cに吸引され、蓄積される。この他、自動排便処理装置Kは、制御回路417による各種制御により、後述するオムツ状ケーシングA内の洗浄、乾燥等の各種動作を自動的に実行し得るように構成されている。
【0015】
オムツ状ケーシングAの構成について説明する。図2は、オムツ状ケーシングAの外観斜視図であり、図3は、その正面図であり、図4は、その側断面図である。図2に示すように、オムツ状ケーシングAは概括的には、人体の腰臀部を包被する形状に形成されている。具体的には、オムツ状ケーシングAは、略方形状の支持プレート部100と、その後端に立ち上がり部200とを有し、全体形状を側面視で略コ字状となるように一体的に形成されている。
【0016】
支持プレート部100は、後部に向かって斬次細幅状となるような略方形状に形成している。立ち上がり部200は、支持プレート部100の後端から垂直に立ち上がり、その中途部から斬次手前方向に湾曲するように形成している。立ち上がり部200は、その上部を前方に傾倒自在に構成しており、患者が支持プレート部100に仰臥した状態で排便等を行うとき、立ち上がり部200は前方に傾倒して太腿部から股部にかけて上方より覆う状態となっている。
【0017】
支持プレート部100の上面は、臀部を密着載置することが可能なやや凹み形状とし、その中央に臀部載置時の肛門位置から後方に向けて排泄物を溜めて洗浄・吸引時に流すための汚物流路101を凹設している。この汚物流路101は、図3に示すように、凹部を形成する底面101a及び両側面101b,101bが所定の曲率を有し、横断面で略U字状となるように滑らかな曲面を形成している。また、立ち上がり部200には、汚物流路101に連設され、排泄物を受けるための前面凹部113を凹設している。汚物流路101と前面凹部113との周縁には、楕円形の環状を成し、腰臀部と人体股間部にわたって密着する防水用シール110を設けている。防水用シール110は、シリコンなどの弾力性を有する素材を使用してオムツ状ケーシングAと人体との間のシール機能を果たすように構成されている。
【0018】
オムツ状ケーシングAは、図4に示すように、汚物流路101の終端で、かつ、立ち上がり部200の下部において、前面凹部113より排出部102側に凹む位置に汚物貯留空間sを形成し、この汚物貯留空間sの終端において排出部102を開口している。この汚物貯留空間sは、図3及び図4に示すように、汚物流路101の終端とその曲率が一致するように滑らかに連設され、排出部102へ向かって流路幅を徐々に減少させて、排出部102側を底部とする筒状の空間を形成している。
【0019】
立ち上がり部200の下端両側縁は、人体股間で挟圧可能な形状に形成し、患者は股間で立ち上がり部200を挟んだ状態で大腿部を支持プレート部100の後部上面に載置する。かかる姿勢の患者の肛門から立ち上がり部200の下部の排出部102に至る空間に汚物貯留空間sが形成されることになる。汚物貯留空間sは、汚物流路101から前面凹部113にかけて防水用シール110で閉塞されるので、人体との間で完全な密閉状の空間と化する。
【0020】
オムツ状ケーシングAは、人体の肛門直下の位置に汚物流路101を設けているので、多量の排泄物に対しても十分に対処可能なスペースを確保することができる。また、オムツ状ケーシングAは、排出部102へ至るまでに汚物貯留空間sを設けているので、人体の各部及びオムツ状ケーシングA内を洗浄する洗浄工程においてオムツ状ケーシングA内の洗浄効果を向上させることができる。かかる洗浄工程における汚物貯留空間sの効果については後述する。
【0021】
立ち上がり部200は、図5に示すように、その先端部200aに人体とオムツ状ケーシングAとを固定するための自動固定装置205を着脱自在に備えている。図2又は図5に示すように、自動固定装置205は、自動固定装置205を先端部200aに取り付けるための取付カバー205aと、人体の腹部を押圧して人体とオムツ状ケーシングAとを互いに位置決めする押圧部205cと、押圧部205cによる人体の押し度合いを調整するスプリング205bとを有している。自動固定装置205は、押圧部205cをスプリング205bを介して取付カバー205aに嵌合することにより組み立てられる。自動固定装置205は、取付カバー205aに備えられた取付穴205dを、先端部200aに挿通することにより固定される。患者がオムツ状ケーシングAを着用する際には、押圧部205cが、スプリング205bの弾性力に基づき図中に示す矢印の方向に上下動し、人体に押圧されるので、オムツ状ケーシングAと人体との自動固定が可能となる。押圧部205cは、触感及びクッション性の良好な素材、例えば、ウレタンなどの素材から成る。
【0022】
オムツ状ケーシングAの内部構造について詳述する。図6は、オムツ状ケーシングAの内部構造を示す詳細図である。オムツ状ケーシングAは、図6に示すように、略方形状の枠からなる支持フレームB1とその後端に立設した縦フレームB2とから構成されたフレームとしてのオムツフレームBをその内部に有する。支持フレームB1は、患者の自重によりオムツ状ケーシングAが歪曲しないように所定の剛性を有している。縦フレームB2は、立ち上がり部200(図4参照)の傾倒により、オムツ状ケーシングAと人体との密閉状態が崩れて内部の排泄物や洗浄水が漏れる不具合を防止できるように所定の剛性を有している。
【0023】
オムツフレームBには、人体の各部位を洗浄するため洗浄水を噴射する各種ノズル104,105,202,203が各所に配置されている。また、オムツフレームBには、汚物流路101内に排出された大便等の汚物を感知して排便がなされたことを感知し、その後の電気的制御を介して各種の制御作動、例えば、上記各種ノズル104,105,202,203からの洗浄水の噴射や汚物の排出等の作動をなすための各種センサ106,107,108,109が各所に配置されている。
【0024】
このように、オムツ状ケーシングAは、オムツフレームBに、各種ノズル104,105,202,203や各種センサ106,107,108,109、その他自動排便処理に必要な電気部材等を設置した後、ウレタン等のケーシング素材を射出発泡することによりカバーリングされ、その外観構成が形成される。なお、オムツ状ケーシングAによってカバーリングされた各種ノズル104,105,202,203や各種センサ106,107,108,109等はオムツ状ケーシングA内部へ露出するように構成される。各種センサ類106,107,108,109の詳細については、後述することとし、まず、各種ノズル104,105,202,203について詳細に説明する。
【0025】
図4に示すように、オムツ状ケーシングAは、前面凹部113の底面の下端部に配設された肛門用ノズル203と、前面凹部113の底面の、肛門用ノズル203より上方の位置に配設されたビデ用ノズル202とを有している。また、オムツ状ケーシングAは、汚物流路101の、排出部102と反対側の端部に配設された大便用ノズル105と、汚物流路101の、排出部102と反対側の端部における、大便用ノズル105より上方の位置に配設された尻用ノズル104とを有している。図1に示すように、各種ノズル104,105,202,203には、それぞれ尻用ノズル管604、大便用ノズル管605、ビデ用ノズル管602、肛門用ノズル管603が接続されている。各種ノズル104,105,202,203には、それぞれ各ノズル管604,605,602,603を介して、本体部Cから洗浄水が供給される構成となっている。
【0026】
図7に示すように、尻用ノズル104は、噴射範囲として、患者の尻部分に付着した排泄物を洗浄水により洗浄するためのノズルである。尻用ノズル104は、尻用噴射孔104aを、その噴射方向が患者の尻部を向くように複数有しており、より広範囲の洗浄を可能とするために尻部の曲面に対応して所定の曲率を持つ態様で配設されている。尻用噴射孔104aは、最も大便が付着する患者の尻部中央部に噴射される洗浄水の噴射圧を最大とするために、中央へ向かって噴射孔径を漸次増加するように構成されている。また、尻用ノズル104から噴射される洗浄水の流量は、4.68l/min、平均流速は、0.012m/sとなるように設定されている。
【0027】
大便用ノズル105は、主として、洗浄水の噴射水圧により大便を細かく粉砕しつつ、大便を汚物流路101から排出部102へ向けて押し流す処理(以下、大便粉砕処理という。)を行うためのノズルである。大便用ノズル105は、尻用ノズル104の下方の汚物流路101の底面側に設けられている。大便用ノズル105は、大便粉砕用噴射孔105aを、その噴射方向が汚物流路101の底面で、かつ、大便が最も溜まり易い人体の肛門直下へ向くように複数有している。大便粉砕用噴射孔105aは、その噴射範囲として、大便が最も溜まり易い箇所である汚物流路101中央に向かって噴射される洗浄水の噴射圧を最大とするために、中央へ向かって噴射孔径を漸次増加するように構成されている。かかる構成とすることで、汚物流路101中央に堆積する大便が最先に粉砕され、洗浄水が排出部102へ向かって流れる流路が確保されることとなる。したがって、大便用ノズル105から洗浄水を噴射し始める初期段階において、大便により跳ね返り、塞き止められた洗浄水が汚物流路101から溢れ出す不具合を防止し得る。大便用ノズル105から噴射される洗浄水の流量は、4.8l/min、平均流速は、0.013m/sとなるように設定されている。また、大便用ノズル105は、後述する加圧ポンプ600に連通し、温水タンク501からの温水を大便用ノズル105から毎分3L、水圧1kgf/cm2の洗浄水として噴射できるように構成している。
【0028】
また、大便用ノズル105は、大便粉砕用噴射孔105aの上方で、尻用噴射孔104aの下方に、センサ洗浄用孔105bを設けている。センサ洗浄用孔105bは、図4に示すように、その噴射方向が排出部102近傍に設けられた後述する赤外線センサの受光部107へ向くように構成されている。かかる構成により、センサ洗浄用孔105bは、大便粉砕処理に加えて、大便粉砕処理を終えた後に、対向する位置に配された受光部107に洗浄水を噴射してその表面を洗浄し、赤外線センサの誤動作を防ぐことが可能となる。
【0029】
図8に示すビデ用ノズル202は、主な噴射範囲として、人体の陰部に付着する排泄物を洗浄するためのノズルであり、男女の別や体型の差に関わらず陰部を洗浄することができるように、細幅かつ縦長の形状となっている。ビデ用ノズル202は、ビデ用噴射孔202aを、その噴射方向が患者の陰部を向くように複数有している。ビデ用噴射孔202aは、尻用ノズル104の尻用噴射孔104a及び大便用ノズル105の大便粉砕用噴射孔105aと比較して孔径を小さくし、孔数を多く構成している。かかる構成とすることで、広範囲の洗浄をしつつ、洗浄水の噴射圧を適度に抑えることができ、人体中でも特にデリケートな陰部に対してソフトな洗浄が可能となる。ビデ用ノズル202は、オムツ状ケーシングA内部に飛散した小便の洗浄をするために、その側部全体を囲うように複数の小便処理噴射孔202bを有している。ビデ用ノズル202から噴射される洗浄水の流量は、4.68l/min、平均流速は、0.010m/sとなるように設定されている。
【0030】
図9に示すように、肛門用ノズル203は、噴射範囲として、患者の肛門及び肛門周辺に付着する排泄物を洗浄するためのノズルであり、その中央に配設された複数の肛門中央噴射孔203aと、肛門中央噴射孔203aの両側側面に配設された複数の肛門周辺噴射孔203bとを有している。肛門中央噴射孔203aは、その噴射方向が患者の肛門へ向かうように構成されており、肛門周辺噴射孔203bは、その噴射方向が肛門の周辺へ向かうように構成されている。肛門中央噴射孔203aの孔径は、肛門周辺噴射孔203bと比較して大きく、かつ、大便粉砕用噴射孔105a及び尻用噴射孔104aの孔径と略同一の孔径で構成されている。かかる構成とすることにより、肛門中央噴射孔203aから噴射される洗浄水の噴射圧を大きくし、人体の肛門の奥深くまで洗浄することが可能となる。他方、肛門周辺噴射孔203bから噴射される洗浄水の噴射圧を適度に抑え、人体中でも特にデリケートな肛門周りに対してソフトな洗浄が可能となる。肛門用ノズル203から噴射される洗浄水の流量は、4.8l/min、平均流速は、0.019m/sとなるように設定されている。
【0031】
なお、より効果的な洗浄を可能とするために、大便粉砕用噴射孔105aや、肛門中央噴射孔203aについては、オリフィス構造を採用しても良い。オリフィス構造とすることで、洗浄水の噴射範囲を広げることができ、洗浄水の水量を抑えつつ、人体の広範囲を洗浄することが可能となる。
【0032】
また、上述した各種ノズル104,105,202,203には、本体部Cより各種ノズル管602,603,604,605を介して、洗浄水のみならず空気が供給される構成となっている。すなわち、洗浄水により患者の各部位を洗浄した後、空気を吹き付けることにより、乾燥させるようになっている。図4に示すように、各種ノズル104,105,202,203からオムツ状ケーシングA内に空気が供給される際に、この空気をオムツ状ケーシングA内から外気へ逃がすための通気孔112が立ち上がり部200の所定箇所に穿たれている。
【0033】
各種センサ106,107,108,109の構成について詳述する。図4に示すように、オムツ状ケーシングAには、汚物流路101の、排出部102と反対側の端部に赤外線センサの発光部106が配設され、排出部102の前縁部上側には赤外線センサの受光部107が配設されると共に、発光部106に隣接して赤外線センサの受信部108が配設されている。これら発光部106、受光部107、及び受信部108は、汚物流路101における大便を検知する大便検知センサGとして機能する。オムツ状ケーシングAには、他に汚物貯留空間s底面に小便を検知する小便検知センサHが配設されており、大便検知センサG及び小便検知センサHは、オムツ状ケーシングAの排泄物を検知する検知手段として機能する。各種センサG,Hは、オムツ状ケーシングA内の大便及び/又は小便を検知した旨の検知信号を図1に示した制御回路417に送信し、制御回路417は、かかる検知信号に基づき、本体部Cの各種の電気的制御を実行する。
【0034】
大便検知センサGは、発光部106より発信された赤外線が、対向する受光部107で受信されたか否かに基づき、発光部106と受光部107の間、すなわち汚物流路101に大便が存在するか否かを検知する。なお、受光部107は、赤外線以外の周囲の光によって誤作動を起こすことを防止するために、周囲の光が届きにくい排出部102の上部に設置されている。
【0035】
ところで、患者がオムツ状ケーシングAをクッション性の高いベッド上で使用する場合には、患者の自重により圧されることによりオムツ状ケーシングAが凹み、汚物流路101に傾きを生じる可能性がある。かかる場合、オムツ状ケーシングA内での洗浄、排泄物の吸引が不十分となり、発光部106が、汚物流路101内に残った洗浄水中に沈み、赤外線が受光部107まで到達しない状態となる。その結果、大便検知センサGが大便を検知した場合と同様の状態となるので、オムツ状ケーシングAが誤作動を起こすこととなる。
【0036】
そこで、かかる誤作動を防止するために、大便検知センサGは、図7に示すように、オムツ状ケーシングAの傾きを検知するための受信部108を発光部106の近傍に備えている。受信部108は、発光部106に隣り合うように設けられており、発光部106から側方へ発信される赤外線を検知可能であるが、発光部106及び受信部108が水没したときには、赤外線を検知できないようになっている。
よって、大便検知センサGは、発光部106が汚物流路101内に残った洗浄水中に沈み、受光部107及び受信部108のいずれもが赤外線を受信しない場合には、オムツ状ケーシングAに傾きが発生していることを検知できる構成となっている。大便検知センサGは、オムツ状ケーシングAに傾きが発生し、受光部107及び受信部108のいずれもが赤外線を受信しない場合には、その旨の検知信号を本体部Cの制御回路417に送信する。かかる検知信号を受信した本体部Cは、制御回路417の制御に基づき図示しない表示部においてエラー表示を行うと共に全ての機能を停止する。なお、オムツ状ケーシングAが傾く状況が発生し得ない場合等には、受信部108を設けず、発光部106及び受光部107のみで大便検知を行う構成としても良い。
【0037】
また、図4に示すように、小便検知センサHは、前後に隣り合うように配設された一対の電極109,109を備えており、一対の電極109,109は、少量の小便をも確実に検知し得るように、オムツ状ケーシングA内で小便が最も集り易い汚物貯留空間sに配設されている。また、電極109、109は、図1に示すように、それぞれ一対の導電線109a,109aを介して本体部Cに設けられた電流形成手段416と接続されており、制御回路417の制御に基づき電流形成手段416からいずれか一方の電極109に導電線109aを介して微弱な電流を流すように設定されている。そして、小便検知センサHは、電極109,109間がかかる微弱な電流によって洗浄水又は小便を導体として通電した際の電流値を検知する構成となっている。小便検知センサHが検知した電流値は、制御回路417に送信され、制御回路417は、かかる電流値が所定の値であるか否かにより小便を検知する。この際、制御回路417は電極109,109の間に流れた電流値が所定の値であるか否かにより小便を検知する判断手段として機能する。
【0038】
ここで、一般に、洗浄水と小便とでは塩度の差が存在するために、電気伝導率の差があり、小便検知センサHが検知する電流値は、洗浄水と小便とで異なる値となる。図10(a)は、小便検知センサHを用いて、洗浄水として使用可能な各種の水について電流値を測定した実験結果であり、図10(b)は、任意に選んだ被験者(A)〜(E)の小便について電流値を測定した実験結果である。なお、尿センサウトプット値は、A/Dコンバータを用いて電圧値に変換した電流値である。また、例えば、図10(b)において、「尿(A)」は被験者(A)の尿を測定した結果を示している。
【0039】
図10から明らかなように、小便は水と比較して塩度が高く、この塩度の差に対応して両者の尿センサウトプット値に大きな差があることが確認される。したがって、小便検知センサHによって、電極109,109間の電流値を検知し、例えば、尿センサウトプット値に対して2.0Vのしきい値を用いることで洗浄水と小便とを確実に判別することが可能となる。
【0040】
なお、電極109,109は、腐食防止のため汚物流路101に露出した部分を金鍍金している。電流形成手段416は、上述の一方の電極109への印加電圧の+極と−極とを交差して交番電流を流すようになっている。かかる構成により、いずれか一方の電極109だけが酸化して腐食することや異物が付着することにより検知精度が低下する不具合を防止することができる。また、電極109は、全体を金鍍金しても良いが、少なくとも汚物流路101に露出した部分を金鍍金するように構成することで、生産コストを節約することができる。
【0041】
このような構成により、患者が排便及び/又は排尿すると、オムツ状ケーシングAは、大便検知センサG及び/又は小便検知センサHにより大便及び/又は小便を検知し、その検知信号を本体部Cの制御回路417へと送信する。かかる検知信号を受信した本体部Cは、制御回路417の制御に基づき、各種ノズル管602,603,604,605に洗浄水を供給し、各種ノズル104,105,202,203の各々から洗浄水がオムツ状ケーシングA内へ噴射される。これにより、患者の尻、陰部及び肛門が洗浄される一方で、大便及び/又は小便が排出部102の方へ流される。このように患者の各部位とオムツ状ケーシングA内を洗浄する洗浄工程を終えた後に、本体部Cは、各種ノズル管602,603,604,605内部に残留する洗浄水を吸引して水抜をし、各種ノズル管602,603,604,605に空気を供給して患者の尻、陰部及び肛門の乾燥がなされる乾燥工程が実行される。
【0042】
本体部Cについて説明する。図1に示すように、本体部Cは、オムツ状ケーシングAの汚物を収容する排泄物収容部Dと、オムツ状ケーシングAの洗浄動作などの各種動作を遂行する装置制御部Fと、オムツ状ケーシングAに洗浄水を供給する洗浄水供給部Eとを有している。本体部Cは、制御回路417の各種の制御に基づき、排泄物収容部D、装置制御部F、洗浄水供給部Eを動作するように構成されている。
【0043】
排泄物収容部Dは、オムツ状ケーシングAから排出された排泄物を洗浄水とともに収容する汚物収容部としての汚物収容タンク300を有しており、汚物収容タンク300は、汚物流入管103を介して、オムツ状ケーシングAの排出部102と接続されている。汚物収容タンク300は、その内部の汚物を捨てる際には、本体部Cから取り外しができるように構成されている。図11又は図12に示すように、汚物収容タンク300の底部付近には、汚物収容タンク300内に貯留された汚物の重量を検出する重量センサ302が設けられている。重量センサ302は、汚物収容タンク300内に所定の重量(例えば、8kg)の汚物が溜まると交換時期を知らせるための信号を制御回路417へ送信する。本体部Cは、かかる信号を受信した制御回路417の制御に基づき、所定の箇所に設けられた図示しない表示部に汚物収容タンク300内の汚物を捨てる交換時期である旨を表示するようになっている。
【0044】
重量センサ302は、図11に示すように、本体部Cの図示しない筐体に重量センサ302が露出するように固定された固定ボディー302e上に変位検出手段としてのフォトリフレクタ302dを載置している。重量センサ302は、フォトリフレクタ302dの上方から固定キャップ302cを被せた上で、固定ボディー302eに弾性部材としてのスプリング302bを挿入し、センサカバー302aでカバーリングされて組み立てられる。重量センサ302は、汚物収容タンク300の重量に応じてスプリング302bが伸縮することで、センサカバー302aが固定ボディー302eに対して上下動するように構成されている。重量センサ302は、図12に示すように、汚物収容タンク300底部に設けられたセンサ用凹部300aをセンサカバー302aに嵌合した状態で、汚物収容タンク300がセンサカバー302a上に載置されるように構成されている。センサ用凹部300aとセンサカバー302aとは、汚物収容タンク300が本体部Cの図示しない筐体内において、所定の方向位置を占めるときのみ嵌合するようになっている。
【0045】
フォトリフレクタ302dは、発光部と受光部とを有し受光部が検知した光の強度に基づいてセンサカバー302aの裏面までの距離を検知する。重量センサ302は、フォトリフレクタ302dが検知したセンサカバー302aまでの距離に基づき、汚物収容タンク300の重量を検知するようになっている。
【0046】
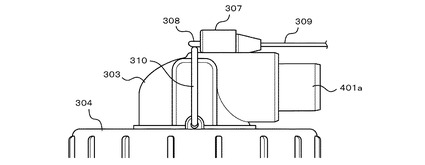
図13ないし図17に示すように、汚物収容タンク300の上部の開口部には、蓋体としてのタンク蓋体304が螺合により着脱自在に設けられており、汚物収容タンク300の上部の開口部は、タンク蓋体304が螺合により適切に装着された状態で閉塞されるように構成されている。タンク蓋体304は、後述するように開閉される図示しない楕円形状の開口部を有しており、タンク蓋体304の開口部には、この開口部の形状に対応した楕円形状の装着部としてのホース連結部303が着脱自在に装着されている。ホース連結部303は、汚物流入管103と接続され、オムツ状ケーシングAから排出された排泄物は、汚物流入管103、ホース連結部303を介して汚物収容タンク300内に収容される。タンク蓋体304の開口部とホース連結部303は、互いに対応する楕円形状から成るため、かかる楕円形状が一致したときのみ、タンク蓋体304とホース連結部303とは、両者間の隙間の無い状態で適切に装着され、汚物収容タンク300内の排泄物が漏れないように構成されている。汚物収容タンク300は、汚物収容タンク300の上部の開口部がタンク蓋体304により閉塞され、かつ、タンク蓋体304とホース連結部303が適切に装着されることで完全な密閉状態となり、汚物収容タンク300内の排泄物の漏れが無い状態となる。
【0047】
タンク蓋体304は、その上面に、タンク蓋体304とホース連結部303が適切に装着された状態でホース連結部303に係合してホース連結部303をタンク蓋体304に固定するための固定部材としての固定金具310が設置されている。固定金具310の両端は、タンク蓋体304上で回動自在に設置されており、ホース連結部303とタンク蓋体304が適切に装着された状態で固定金具310を起こしてホース連結部303の上部をタンク蓋体304に向けて押圧してホース連結部303をタンク蓋体304に固定できるように構成されている。
【0048】
ホース連結部303の上部には、図15に示すように、筐体307が設置されて、この筐体307には一対の電極308,308が所定の間隔を置いて固定支持されている。電極308,308は、一対の信号線309,309に接続されており、この信号線309,309は、図1に示す制御回路417に接続されており、この制御回路417から信号線309,309のいずれか一方に電流を流すように設定されている。電極308,308は、タンク蓋体304を汚物収容タンク300に螺合して閉塞し、かつ、タンク蓋体304とホース連結部303が適切に装着された状態で、固定金具310を起こし、ホース連結部303をタンク蓋体304に固定するとこの固定金具310により導通するように構成されている。この状態では、電極308,308間が固定金具310を介して通電し、制御回路417は、この通電による電流を検知することにより、タンク蓋体304とホース連結部303が適切に装着された状態で、ホース連結部303がタンク蓋体304に固定されたこと、すなわち、汚物収容タンク300が完全な密閉状態となったことを検知する。一方、タンク蓋体304とホース連結部303との装着状態が悪い場合には、制御回路417は、上述の通電を検知しないので、汚物収容タンク300内の密閉状態が確保されていないことを検知する。かかる場合には、本体部Cは、制御回路417の制御に基づき全ての機能を停止し、図示しない表示部にエラー表示を行うようになっている。この際に、制御回路417は、タンク蓋体304とホース連結部303が適切に装着された状態で、ホース連結部303がタンク蓋体304に固定されたことを検知し、汚物収容タンク300が完全な密閉状態であるか否かを検知する検知手段として機能する。したがって、汚物収容タンク300内の密閉状態が確保されていない場合に、本体部Cが動作することを防止し、また、汚物収容タンク300内から汚物やその臭いが外部に漏れることを防止することができる。
【0049】
なお、タンク蓋体304が汚物収容タンク300に螺合されて閉塞されているか否かは、外観上で明確に視認できる場合が多く、また、固定金具310を起こしてホース連結部303を固定する際にタンク蓋体304が緩んでいる感触により確認できる場合が多い。したがって、本実施形態においては、タンク蓋体304が汚物収容タンク300に螺合されて閉塞されているか否かを検知する構成を採用していないが、かかる構成を採用しても良い。例えば、固定金具310の両端をタンク蓋体304の上面ではなく、汚物収容タンク300の上面に回動自在となるように設置し、固定金具310が、ホース連結部303をタンク蓋体304と共に汚物収容タンク300に固定するようにしても良い。この構成では、汚物収容タンク300が、タンク蓋体304との螺合により閉塞され、かつ、ホース連結部303がタンク蓋体304に固定された場合にだけ、固定金具310を起こし、ホース連結部303をタンク蓋体304に固定できるようになっている。したがって、制御回路417は、上述の通電を検知してタンク蓋体304が汚物収容タンク300に螺合されて閉塞されていることをも検知することができる。
【0050】
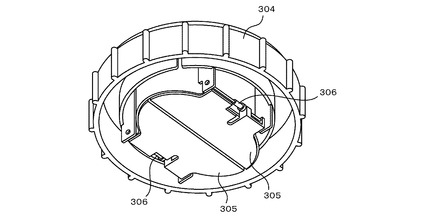
図13に示すように、タンク蓋体304の汚物収容タンク300内部側には、一対の内部蓋体305,305が備えられており、この一対の内部蓋体305,305は、ホース連結部303がタンク蓋体304から離脱したときにタンク蓋体304の開口部を汚物収容タンク300内部側から自動的に閉蓋し得るように構成されている。すなわち、図13に示すように、内部蓋体305,305は、スプリング306,306により閉蓋方向に付勢されており、ホース連結部303を取り外した状態では、内部蓋体305、305はスプリング306,306の付勢によりタンク蓋体304の開口部を汚物収容タンク300内部から閉蓋する。一方、図14に示すように、ホース連結部303をタンク蓋体304に挿入して接続した状態では、内部蓋体305,305は下方に垂下状態で開蓋形態になっている。かかる構成により、本体部Cから汚物収容タンク300を取り外して中の汚物を捨てる際に、ホース連結部303を汚物収容タンク300から取り外しても、タンク蓋体304の開口部の内部蓋体305,305により自動的に閉蓋されるので、汚物収容タンク300内の汚物のにおいや汚物自体が外部へ流出することはなく、汚物収容タンク300を安全に持ち運びすることができる。汚物収容タンク300を所定の場所まで運んだ後は、タンク蓋体304を取り外し、汚物収容タンク300の上部の開口部から汚物を捨てることとなる。
【0051】
また、図15に示すように、ホース連結部303には、汚物流入管103と隣り合うように吸気管401aが接続されている。図1に示すように、汚物収容タンク300は、吸気管401aを介して装置制御部Fに接続されている。汚物収容タンク300の内部は、後述する装置制御部Fにおける吸入ポンプ400の作動により吸気管401aを介して空気が吸入されて負圧状態が形成され、汚物流入管103を介して汚物をオムツ状ケーシングAから吸引することができるようになっている。
【0052】
洗浄水供給部Eは、図1に示すように、洗浄水としての原水を供給する原水タンク500と、オムツ状ケーシングA内に供給する洗浄水を所定温度に加熱するための温水タンク501と、原水タンク500から温水タンク501への給水を制御するソレノイドバルブ503を備えている。温水タンク501は、原水タンク500からソレノイドバルブ503を介して供給された原水を加熱する管ヒータ502と、水位を感知する水位センサ505と、水温を感知する温度センサ506とを備えている。洗浄水供給部Eは、水位センサ505で温水タンク501内の水位が、給水を要する状態であることを検知すると、かかる検知信号を制御回路417へ送信する。洗浄水供給部Eは、かかる検知信号を受信した制御回路417の制御によりソレノイドバルブ503を開いて、原水タンク500から温水タンク501へ所定量の原水を供給する。次に、洗浄水供給部Eは、水位センサ505で温水タンク501内が原水で満たされて所定の水位に到達したことを検知すると、かかる検知信号を制御回路417へ送信し、制御回路417の制御に基づきソレノイドバルブ503を閉じて原水供給を遮断する。
【0053】
洗浄水供給部Eは、温水タンク501内の原水の温度を温度センサ506で検知して検知信号を制御回路417へ送信し、制御回路417の制御を介して患者が予め設定する温度に維持するように、かかる原水を管ヒータ502で加熱して温水とする。患者が予め設定する温度は、体温に近い温度を基準に決定される。かかる構成により、温水タンク501中の温水を洗浄水としてオムツ状ケーシングA内へ送水する洗浄工程を実行する際には、患者へは常に体温に近い温度の洗浄水が供給されるので、患者は良好な使用状態を得ることができる。温水タンク501の底部側面に設けられた出口は、送水管504aを介して装置制御部Fに接続されており、この送水管504aを介して温水タンク501内で加熱された洗浄水が装置制御部Fへ供給される。なお、ソレノイドバルブ503の代わりに、フロートバルブ等を用いて、機械的な動作により原水タンク500から温水タンク501への原水供給を調整するように構成しても良い。
【0054】
装置制御部Fは、上述のように、排泄物収容部Dと吸気管401aを介して接続されており、また、洗浄水供給部Eと送水管504aを介して接続されている。装置制御部F内において、吸気管401aは、弁としての吸気バルブ409、減圧部としての真空タンク408、吸気管401b、1次悪臭除去フィルタ407a、圧力スイッチ413、吸気管401c、ソレノイドバルブ6のNOポート、ソレノイドバルブ6のCOMポート、吸気管401dを経て吸入ポンプ400の吸気口402に接続されている。また、吸入ポンプ400の排気口405は、ソレノイドバルブ5のCOMポートに接続され、ソレノイドバルブ5のNOポートは、エア排出管414を介して、2次悪臭除去フィルタ407bに接続されている。
【0055】
かかる構成の下、洗浄工程においては、各種センサG,Hにより汚物を検知した後、オムツ状ケーシングA内の汚物による悪臭を除去する工程が行われる。具体的には、汚物収容タンク300内は、吸入ポンプ400の作動によって空気が吸引されて負圧に保たれ、オムツ状ケーシングA内から汚物流入管103、汚物収容タンク300、吸入ポンプ400に向かって空気が流れる。この空気は、オムツ状ケーシングA内の汚物の悪臭を伴う空気であるが、汚物収容タンク300と吸入ポンプ400との間に備えた1次悪臭除去フィルタ407aにより悪臭が除去される。1次悪臭除去フィルタ407aにより悪臭が除去されると同時に腐食性のあるガスも除去されるので、吸入ポンプ400の腐食を防止することができる。
【0056】
また、吸入ポンプ400の排気口405から2次悪臭除去フィルタ407bに向かって流れた空気は、2次悪臭除去フィルタ407bで更に悪臭を除去した後に外部へと排出される。外部へ空気を排出する際に、2次悪臭除去フィルタ407bを備えることで、悪臭の外部流出を完全に防止できると共に、1次悪臭除去フィルタ407aだけを備えたときよりも悪臭除去効果を長期に維持することができる。
【0057】
一方、送水管504aは、フィルタ507、送水管504b、加圧ポンプ600、送水管504c、T字パイプ412、ノズル管601、各種ソレノイドバルブ1,2,3,4、各種ノズル管602,603,604,605を経て、オムツ状ケーシングA内の各種ノズル104,105,202,203に接続されている。すなわち、洗浄水供給部Eから供給される洗浄水を加圧ポンプ600により加圧することで、洗浄水を各種ノズル104,105,202,203からオムツ状ケーシングA内へ噴射し得る構成となっている。フィルタ507は、加圧ポンプ600に異物が流入しないように、洗浄水中に混入する異物を除去するためのものである。
【0058】
かかる構成の下、洗浄工程においては、オムツ状ケーシングA内の汚物による悪臭を除去する工程を実行した後に、上述した大便粉砕処理を実行する。具体的には、吸入ポンプ400を動作してオムツ状ケーシングA内の吸引を維持しつつ、ソレノイドバルブ4を開き、加圧ポンプ600を動作することにより、大便用ノズル105より洗浄水を噴射して大便粉砕処理を実行する。大便粉砕処理により、粉砕された大便は洗浄水と共に排出部102へ向けて押し流され、その一部が汚物流入管103を介して汚物収容タンク300内へ吸引、収容される。
【0059】
しかし、吸入ポンプ400の吸引力だけでは、オムツ状ケーシングA内の汚物を汚物収容タンク300内へ完全に吸引収容するのは困難である。そこで、本実施形態においては、吸入ポンプ400と汚物収容タンク300との間に、吸入ポンプ400の吸引力を増大させるための真空タンク408を配置している。真空タンク408内に真空状態を形成することにより、より強い負圧を発生させてオムツ状ケーシングA内の汚物を効率良く吸引することができる構成となっている。
【0060】
具体的には、吸入ポンプ400を動作した状態で吸気バルブ409を閉じて、オムツ状ケーシングAから汚物収容タンク300への汚物の吸引を停止し、吸入ポンプ400の吸引を継続して行うことにより真空タンク408内に真空状態を形成する。この間、オムツ状ケーシングA内で大便粉砕処理により細かく粉砕された大便は、洗浄水の水圧により汚物貯留空間sへと押し流されるが、吸気バルブ409が閉じられているため排出部102から汚物流入管103へと吸引されることはない。よって、汚物貯留空間sにおいて、大便を含む洗浄水の流れが滞り、大便を含む洗浄水が上下に旋回するような渦巻き状の流れを生じる(以下、過流現象という。)。過流現象により、大便が一層細かく粉砕されて洗浄水と十分に混合されると同時に、オムツ状ケーシングA内で特に汚物が付着しやすい排出部102付近が十分に洗浄される。
【0061】
その後、真空タンク408の内部圧力を、吸入ポンプ400と真空タンク408の間に配置された圧力スイッチ413で検知し、内部圧力が最大真空圧に到達した瞬間に、吸気バルブ409を開く。この瞬間、真空タンク408に形成された最大真空圧により、過流現象によって洗浄水と十分に混合された大便は、排出部102から汚物流入管103を介して汚物収容タンク300へと一気に吸入収容されることとなる。なお、長時間の使用により、真空タンク408内に水分が溜まるため、真空タンク408の下部には、図示しない栓を配置して、この栓を抜くことにより真空タンク408内の排水ができる構造としている。
【0062】
上述のように、自動排便処理装置Kは、洗浄工程終了後に、各種ノズル104,105,202,203から空気を噴射し、人体を乾燥する構成となっている。具体的には、吸入ポンプ400の排気口405は、ソレノイドバルブ5のCOMポートに接続され、ソレノイドバルブ5のNCポートは、エア供給管410b、逆止弁411、エア供給管410c、T字パイプ412、ノズル管601、各種ソレノイドバルブ1,2,3,4、各種ノズル管602,603,604,605を経て、オムツ状ケーシングA内の各種ノズル104,105,202,203に接続されている。
【0063】
一方、吸入ポンプ400の吸気口402側には、外部エア供給フィルタ404が備えられており、外部エア供給フィルタ404は、外部エア供給管415を介して、ソレノイドバルブ6のNCポートに接続され、ソレノイドバルブ6のCOMポートは、吸気口402に接続されている。
【0064】
かかる構成により、乾燥工程においては、ソレノイドバルブ2,3、ソレノイドバルブ5,6のNCポート及び逆止弁411を開いた状態で、吸入ポンプ400を稼動することにより、外部エア供給フィルタ404から空気を取り込み、かかる空気を乾燥空気として、オムツ状ケーシングA内へ送り出す。よって、外部エア供給フィルタ404から取り込まれた空気を、乾燥空気として、尻用ノズル104及び肛門用ノズル203から送り出し、人体及びオムツ状ケーシングA内の乾燥を行うことができるようになっている。オムツ状ケーシングA内へ送り出された空気は、通気孔112からオムツ状ケーシングA外部へ排気される。また、逆止弁411は、洗浄工程の際には閉じられているので、吸入ポンプ400へ洗浄水が逆流することはない。
【0065】
なお、装置制御部Fにおいて、各種ソレノイドバルブ1,2,3,4は1ユニット化され、1つの流入口と4つの流出口で管路を形成するソレノイドバルブユニット606を構成している。ソレノイドバルブユニット606は、4つの流出口を制御回路417の制御に基づき選択的に順次開閉動作ができるように構成されている。かかる構成により、管路構成を簡易化して部品点数の削減をすることができ、また、組み立て性を向上することができる。
【0066】
また、ソレノイドバルブ5,6、外部エア供給フィルタ404、1次悪臭除去フィルタ407a、2次悪臭除去フィルタ407b、圧力スイッチ413は1ユニット化されてフィルタアセンブリ607を構成している。かかる構成により、管路形成を簡略化して部品点数の削減をすることができ、また、組み立て性を向上することができることに加えて、各種フィルタ404、407a、407bの交換作業を容易化することができる。
【0067】
この発明の実施例は以上のように構成されており、実際に使用する場合の手順及び機能のフローを説明する。
【0068】
自動排便処理装置Kは、大便、小便を各種センサG,Hの検知により判別し、各洗浄工程を自動的に行う自動排便処理モードと、患者の操作指示があった場合に行う手動排便処理モードを有している。
【0069】
図18は、自動排便処理モード時の自動排便処理装置Kの処理手順を示すフローチャートである。図18に示すように、自動排便処理装置Kは、図示しない電源スイッチの操作により、本体の電源が投入されると、小便検知センサHの検出値に基づいて、汚物流路101に小便が存在するか否かを判断する(ステップSa1)。
【0070】
この判断の結果、小便が存在しない場合(ステップSa1:NO)、自動排便処理装置Kは、大便検知センサGの検出値に基づいて、汚物流路101に大便が存在するか否かを判断する(ステップSa2)。この判断の結果、大便が存在しない場合(ステップSa2:NO)、自動排便処理装置Kは、再度、小便が存在するか否かを判断すべく、処理手順をステップSa1に戻す。一方、大便が存在する場合(ステップSa2:YES)、すなわち、汚物流路101に大便のみが存在する場合、自動排便処理装置Kは、大便洗浄工程を実行する(ステップSa4)。
【0071】
また、ステップSa1において小便が存在する場合(ステップSa1:YES)、自動排便処理装置Kは、汚物流路101に大便が存在するか否かを判断する(ステップSa3)。この判断の結果、大便が存在する場合(ステップSa3:YES)、すなわち、汚物流路101に小便及び大便が存在する場合、自動排便処理装置Kは、大便を処理する大便洗浄工程を実行する(ステップSa4)。
【0072】
一方、自動排便処理装置Kは、大便が存在しない場合(ステップSa3:NO)、すなわち、汚物流路101に小便のみが存在する場合、小便を処理する小便洗浄工程を実行する(ステップSa5)。
【0073】
大便洗浄工程(ステップSa4)又は小便洗浄工程(ステップSa5)を終了後、自動排便処理装置Kは、人体及びオムツ状ケーシングA内の乾燥をするための乾燥工程を実行する(ステップSa6)。
【0074】
図19は、大便洗浄工程の処理手順を示すフローチャートである。自動排便処理装置Kは、初期状態において、各種ソレノイドバルブ1,2,3,4とソレノイドバルブ5,6のNCポートと、吸気バルブ409と、逆止弁411とを閉じている。また、自動排便処理装置Kは、初期状態において、ソレノイドバルブ5,6のNOポートを開けている。図19に示すように、自動排便処理装置Kは、まず、吸気バルブ409を開け(ステップSb1)、吸入ポンプ400を始動(ステップSb2)する。これにより、オムツ状ケーシングA内部の大便による臭い及び大便の一部が汚物収容タンク300に吸引される。同時にオムツ状ケーシングA内の悪臭を含む空気は、汚物流入管103、汚物収容タンク300、吸入ポンプ400に向かって流れ、吸気口402前の1次悪臭除去フィルタ407a及び排気口405後の2次悪臭除去フィルタ407bを経て悪臭が除去されてから外部へ放出される。
【0075】
次いで、ソレノイドバルブ4を開けた後に(ステップSb3)、加圧ポンプ600を所定時間だけ稼動する(ステップSb4)。これにより、温水タンク501内の温水が、大便用ノズル管605に送水されて大便用ノズル105から洗浄水として噴射され、大便粉砕処理を実行する。大便粉砕処理によって粉砕され、汚物流路101方向に押しやられた大便は、汚物貯留空間sで過流現象により洗浄水と十分に混合される(以下、過流現象による混合動作という)。
【0076】
次に、自動排便処理装置Kは、真空タンク408内を真空状態とするために吸気バルブ409を閉じて真空形成を開始する(ステップSb5)。圧力スイッチ413に基づく内部圧力の検出値が最大真空圧(例えば、600mmHg)に到達するまで待った後(ステップSb6:YES)、自動排便処理装置Kは、圧力スイッチ413からの検知信号に基づき図示しない制御装置を介して加圧ポンプ600を稼動し(ステップSb7)、吸気バルブ409を開く(ステップSb8)。この瞬間、真空タンク408に形成された最大真空圧により、過流現象による混合動作後の大便は、排出部102から汚物流入管103を介して汚物収容タンク300に一気に吸入収容される(以下、真空吸入動作という)。
【0077】
そして、自動排便処理装置Kは、加圧ポンプ600を停止し(ステップSb9)、再び大便検知センサGの検出値に基づいて、汚物流路101内に残便がないか否かを判断する(ステップSb10)。この判断の結果、残便が存在する場合(ステップSb10:YES)、自動排便処理装置Kは、再度、過流現象による混合動作及び真空吸入動作を繰り返すべく、処理手順をステップSb5に戻す。そして、自動排便処理装置Kは、過流現象による混合動作及び真空吸入動作を、大便検知センサGが大便を検知することがなくなるまで繰り返す。
【0078】
次に、汚物流路101内に残便が検知されなくなると(ステップSb10:NO)、自動排便処理装置Kは、ソレノイドバルブ4を閉じ(ステップSb11)、次いで、ソレノイドバルブ3を開け(ステップSb12)、加圧ポンプ600を所定の時間だけ稼動する(ステップSb13)。これにより、温水タンク501から温水が、尻用ノズル管604に送水されて尻用ノズル104から洗浄水として噴射され、患者の尻付近に付着した大便を洗浄する(以下、お尻の洗浄動作という)。
【0079】
次に、自動排便処理装置Kは、ソレノイドバルブ3を閉じ(ステップSb14)、次いで、ソレノイドバルブ2を開け(ステップSb15)、加圧ポンプ600を所定の時間だけ稼動する(ステップSb16)。これにより、温水タンク501から温水が、肛門用ノズル管603に送水されて肛門用ノズル203から洗浄水として噴射され、患者の肛門付近に付着した大便を洗浄する(以下、肛門の洗浄動作という)。さらに、自動排便処理装置Kは、お尻の洗浄動作及び肛門の洗浄動作を洗浄回数が3回に到達するまで繰り返す(ステップSb18:YES)。これにより、患者のお尻及び肛門付近の洗浄を完璧に遂行することが可能となる。
【0080】
次に、洗浄回数が3回に到達すると(ステップSb18:NO)、自動排便処理装置Kは、ソレノイドバルブ1を開け(ステップSb19)、加圧ポンプ600を所定時間だけ稼動する(ステップSb20)。これにより、温水タンク501から温水が、ビデ用ノズル管602に送水されてビデ用ノズル202から洗浄水として噴射され、患者の陰部付近に付着した大便を洗浄する(以下、ビデの洗浄動作という)。
【0081】
次に、自動排便処理装置Kは、ソレノイドバルブ1を閉じ(ステップSb21)、吸入ポンプ400を停止し(ステップSb22)、次いで、各種ソレノイドバルブ1,2,3,4、ソレノイドバルブ5,6のNCポート及び逆止弁411を開け(ステップSb23)、吸入ポンプ400を所定の時間だけ稼動する(ステップSb24)。これにより、後述の乾燥工程(ステップSa6)へ進む前に、吸入ポンプ400を稼動して、ビデ用ノズル管602、肛門用ノズル管603、尻用ノズル管604、大便用ノズル管605の各ノズル管内へ外部エア供給フィルタ404から取り込んだ空気を送風し水分を除去する(以下、ノズル管内の水分除去動作という)。
【0082】
そして、自動排便処理装置Kは、各種ソレノイドバルブ1,2,3,4、ソレノイドバルブ5,6のNCポート及び逆止弁411を閉じ(ステップSb25)、大便洗浄工程を終了する。
【0083】
図20は、小便洗浄工程の処理手順を示すフローチャートである。図20に示すように、自動排便処理装置Kは、まず、吸気バルブ409を開き(ステップSc1)、吸入ポンプ400を始動し(ステップSc2)、次いで、ソレノイドバルブ1,3を開いた後(ステップSc3)、加圧ポンプ600を所定時間だけ稼動する(ステップSc4)。これにより、小便が汚物収容タンク300に吸引され、同時に、お尻の洗浄動作及びビデの洗浄動作が実行される。
【0084】
次に、自動排便処理装置Kは、ソレノイドバルブ1,3を閉じ(ステップSc5)、ソレノイドバルブ4を開き(ステップSc6)、次いで、吸気バルブ409を閉じた後(ステップSc7)、吸入ポンプ400を稼動する(ステップSc8)。これにより、真空タンク408内の真空形成を開始する。
【0085】
そして、所定時間経過後に、自動排便処理装置Kは、加圧ポンプ600を稼動し、原水タンク500中の温水タンク501から送水された温水を、大便用ノズル管605を介して大便用ノズル105から洗浄水として噴射し、小便を汚物流路101方向に押しやる(ステップSc9)。そして、ほぼ同時に、吸気バルブ409を開く(ステップSc10)。この瞬間、真空タンク408に形成された最大真空圧により、小便は、排出部102から汚物流入管103を介して汚物収容タンク300に一気に吸入収容される。
【0086】
その後、自動排便処理装置Kは、加圧ポンプ600を停止し(ステップSc11)、吸入ポンプ400を停止し(ステップSc12)、次いで、ソレノイドバルブ4を閉じた後(ステップSc13)、吸気バルブ409を閉じ(ステップSc14)、小便洗浄工程を終了する。
【0087】
なお、自動排便処理装置Kは、上述の大便洗浄工程及び小便洗浄工程において、1次悪臭除去フィルタ407a、及び2次悪臭除去フィルタ407bを介して汚物収容タンク300に吸入収容される汚物から発する悪臭が可及的に吸入ポンプ400外に排出されないようにしている。
【0088】
図21は、乾燥工程の処理手順を示すフローチャートである。図21に示すように、自動排便処理装置Kは、まず、ソレノイドバルブ4を開き(ステップSd1)、次いで、吸気バルブ409を閉じた後(ステップSd2)、吸入ポンプ400を稼動し、真空タンク408内の真空形成を開始する(ステップSd3)。そして、所定時間経過後に、自動排便処理装置Kは、加圧ポンプ600を稼動し、原水タンク500中の温水タンク501から送水された温水を、大便用ノズル管605を介して大便用ノズル105から噴射する(ステップSd4)。
【0089】
かかる噴射は、大便用ノズル管605から大便用ノズル105の間に洗浄水を充填し、次回の洗浄工程の際に、大便用ノズル105から即座に洗浄水を噴射することを可能とするための動作(以下、充填動作という。)である。
【0090】
次に、自動排便処理装置Kは、吸気バルブ409を開き(ステップSd5)、その瞬間に、真空タンク408に形成された最大真空圧により、充填動作により噴射された温水は、排出部102から汚物流入管103を介して汚物収容タンク300に一気に吸入収容される。
【0091】
次に自動排便処理装置Kは、加圧ポンプ600を停止し(ステップSd6)、次いで、吸入ポンプ400を停止した後に(ステップSd7)、ソレノイドバルブ4を閉じる(ステップSd8)。その後、吸気バルブ409を閉じ(ステップSd9)、次いで、ソレノイドバルブ2,3、ソレノイドバルブ5,6のNCポート及び逆止弁411を開いた後(ステップSd10)、吸入ポンプ400を所定時間稼動する(ステップSd11)。吸入ポンプ400を所定時間だけ稼動すると、ソレノイドバルブ2,3、ソレノイドバルブ5,6のNCポート、及び逆止弁411を閉じ(ステップSd12)、乾燥工程を終了する。これにより、外部エア供給フィルタ404から取り込まれた空気を、乾燥空気として、尻用ノズル104及び肛門用ノズル203から送り出し、人体及びオムツ状ケーシングA内の乾燥を行う。
【0092】
そして、図18に示すように、自動排便処理装置Kは、一連の処理により、人体及びオムツ状ケーシングA内の洗浄工程(ステップSa2又はステップSa3)及び乾燥工程(ステップSa6)を終了すると、再度、大便及び小便の検知を実行すべく、処理手順をステップSa1に戻す。
【0093】
ところで、上述したように、本実施形態の自動排便処理装置Kは、動作モードとして自動排便処理モードの他に、患者の操作指示があった場合に行う手動排便処理モードを有する。この手動排便処理モードにおいては、自動排便処理装置Kは、大便検知センサG及び小便検知センサHによるセンシングを行わず、患者から大便洗浄工程及び小便洗浄工程のいずれか一方を行うための操作指示を受け付けた場合にだけ、排便処理を実行する。なお、患者は、自動排便処理装置Kの所定の場所に設けられた操作パネルや、リモートコントローラを用いて操作指示を行う。以下、この手動排便処理モード時の動作について説明する。
【0094】
図22は、手動排便処理モード時の自動排便処理装置Kの処理手順を示すフローチャートである。図22に示すように、自動排便処理装置Kは、小便洗浄指示があった場合には(ステップSf1:YES)、上述した自動排便処理モードの小便洗浄工程と同じ手順にて小便洗浄工程を実行する(ステップSf4)。また、小便洗浄指示がなく(ステップSf1:NO)、大便洗浄指示があった場合には(ステップSf2:YES)、上述した自動排便処理モードの大便洗浄工程と同じ手順にて大便洗浄工程を実行する(ステップSf3)。一方、小便洗浄指示がなく(ステップSf1:NO)、かつ、大便洗浄指示もない場合には(ステップSf1:NO)、指示があるまで待機する。
【0095】
そして、大便洗浄工程(ステップSf3)又は小便洗浄工程(ステップSf4)を終了後、自動排便処理装置Kは、オムツ状ケーシングA内の乾燥をするために、上述した自動排便処理モードの乾燥工程と同じ手順にて乾燥工程を実行し(ステップSf5)、手動排便処理モードを終了する。
【0096】
以上、本発明の実施の形態のいくつかを図面に基づいて詳細に説明したが、これらは例示であり、発明の開示の欄に記載の態様を始めとして、当業者の知識に基づいて種々の変形、改良を施した他の形態で本発明を実施することが可能である。
【0097】
例えば、図23に示すように、自動固定装置205の押圧部205cの表面に、人体の腹部をマッサージするためのマッサージ器204を配置しても良い。マッサージ器204は、表面をシリコンパッドで形成し、低周波出力により腸への刺激を行って排便を促すものであり、図示しない低周波発生器から導いたプレート状の治療導子から成るマッサージ器204を押圧部205cの表面に貼付することにより構成する。マッサージ器204で人体腹部をマッサージすることにより、腸が刺激され排便を促すことが可能となる。
【0098】
また、自動固定装置205の代わりに、図24に示すように、埋込式自動固定装置209を適用して、人体とオムツ状ケーシングAを固定するように構成しても良い。埋込式自動固定装置209は、先端部200aの内側で前面凹部113の上部に設けられた取付凹部209aに設置される。埋込式自動固定装置209は、埋込式自動固定装置209を取付凹部209aに取り付けるための取付カバー209bと、人体の押し度合いを調整する一対のスプリング209c、209cと、人体の腹部に押圧して固定するための押圧部209dを有している。埋込式自動固定装置209は、押圧部209dをスプリング209c、209cを介して取付カバー209bに嵌合することにより組み立てられ、取付カバー209bを、取付凹部209aに接着することにより固定される。患者がオムツ状ケーシングAを着用する際には、図25及び図26に示すように、押圧部209dが、スプリング209c、209cの弾性力に基づき図中に示す矢印の方向に上下動し、人体に押圧されるので、オムツ状ケーシングAと人体との自動固定が可能となる。押圧部209dは、ABS樹脂から成り、表面仕上げとして、触感及びクッション性の良好な素材、例えば、ウレタンなどの素材を発泡して成形される。
【0099】
また、自動固定装置205の代わりに、図27に示す、シートベルト206,206を適用して、人体とオムツ状ケーシングAを固定するように構成しても良い。各シートベルト206は、その一端を支持プレート部100の両側面に取り付けられ、人体の腰部を両側から囲むように装着され、その他端が立ち上がり部200の前面において、バックル206aで固定される。バックル206aは、使用者の体型に合わせて、シートベルト206の長さを調整できるように構成されている。
【0100】
また、自動固定装置205の代わりに、図28に示す、腹巻207、面ファスナ207a,207b、カバー207cを用いて、人体とオムツ状ケーシングAを固定するように構成しても良い。カバー207cは、人体腹部側及び腰部側に面ファスナ207a,207bを有し、オムツ状ケーシングAを覆うように構成されている。使用者は、腹巻207を腰臀部に装着した状態でオムツ状ケーシングAを装着し、面ファスナ207a,207bで腹巻207を固定することにより、人体とオムツ状ケーシングAが固定される。
【0101】
また、自動固定装置205の代わりに、図29に示すように、サスペンダー208を適用して、人体とオムツ状ケーシングAを固定するように構成しても良い。サスペンダー208は、その両端に開形状のフック208a、208bを備え、先端部200aの外側に設けられた固定部208cと支持プレート部100の外側に設けられた固定部208cと同形状の図示しない固定部とに、フック208a,208bをそれぞれ掛止することで固定されるように構成されている。患者がオムツ状ケーシングAを装着する際は、まずオムツ状ケーシングAを身体に着用し、両肩部にサスペンダー208を掛けた後に、固定部208cと固定部208dとに、フック208a,208bをそれぞれ掛止することにより、人体とオムツ状ケーシングAが固定される。
【0102】
また、自動固定装置205の代わりに、図30及び図31に示すように、中空状のチューブである前面チューブ210及び後面チューブ211を適用して、人体とオムツ状ケーシングAを固定するように構成しても良い。前面チューブ210は、人体の腹部を固定するためのもので先端部200aの内側で前面凹部113の上部に設置され、また、後面チューブ211は、人体の腰臀部を固定するためのもので支持プレート部100の内側表面に設置される。
【0103】
前面チューブ210は、一方の側面に配設された空気圧入口210aと、空気圧入口210aの反対側の側面に配設された空気排出口210bとを備えており、後面チューブ211も同様に、空気圧入口211aと、空気排出口211bとを備えている。また、空気圧入口210a及び211aは、図32に示すように、ソレノイドバルブユニット606に増設されたソレノイドバルブ7,8にそれぞれ接続されている。
【0104】
かかる構成の下で、ソレノイドバルブ5,6のそれぞれのNCポート、逆止弁411、ソレノイドバルブ7,8を開けた状態で、吸入ポンプ400を稼動することにより、外部エア供給フィルタ404から空気を取り込む。かかる空気は、ソレノイドバルブ7,8を介して、それぞれ空気圧入口210a、211aに供給されて、前面チューブ210及び後面チューブ211が膨張する。よって、膨張した前面チューブ210及び後面チューブ211がそれぞれ腹部と腰部に密着挟圧されて、人体とオムツ状ケーシングAとの固定が可能となる。
【0105】
人体からオムツ状ケーシングAを取り外す際には、空気排出口210b、211bに取り付けられた図示しない弁を開放して排気し、前面チューブ210及び後面チューブ211を収縮させる。なお、前面チューブ210又は後面チューブ211のうちいずれか一方のみを設置して、人体とオムツ状ケーシングAとの固定を行う構造としても良い。
【0106】
また、図33に示すようにオムツ状ケーシングAに自動固定装置205を装着せずに、立ち上がり部200の内部に図示しない弾性材を内挿し、先端部200aが予め内側に傾倒するように構成しても良い。かかる構成により、患者がオムツ状ケーシングAを着用する際には、先端部200aをZ方向に開くと、立ち上がり部200内の図示しない弾性材の弾性力により先端部200aが腹部を押圧し、人体とオムツ状ケーシングAとの固定が可能となる。
【0107】
また、図34及び図35に示すように、オムツ状ケーシングAにおいて、支持プレート部100と立ち上がり部200とを分離することにより、人体とオムツ状ケーシングAを固定するように構成しても良い。オムツ状ケーシングAは、支持プレート部100と、支持プレート部100の後端に設けられたヒンジ部120と、ヒンジ部120回りに回動自在となるように設置された立ち上がり部200とを有している。
【0108】
ヒンジ部120の内部には、図示しないネジ締結部が備えられ、ヒンジ部120を右ネジ方向に回すことにより、立ち上がり部200の位置の固定ができるように構成されている。支持プレート部100に設けられた汚物流路101は、立ち上がり部200の前面凹部113と分離されており、汚物流路101は大便を処理し、前面凹部113は小便を処理するように構成されている。前面凹部113の所定の箇所には小便を排出する小便排出用ホース121が接続され、この小便排出用ホース121は、汚物流路101と所定の箇所で接続されている。
【0109】
かかる構成の下で、患者がオムツ状ケーシングAを着用する際には、ヒンジ部120を緩めてから支持プレート部100に腰臀部を載置した状態で、立ち上がり部200をヒンジ部120周りに回動して腹部と密着させた後、ヒンジ部120を右ネジ方向に回して固定することにより、人体とオムツ状ケーシングAとの固定が可能となる。
【0110】
また、大便検知センサG、小便検知センサHでそれぞれ大便、小便を検知するように構成する代わりに、図36に示すように、大便と小便の検知を同時に実行し得る大小便検知センサIを採用しても良い。図36は、大小便検知センサIの概略図である。大小便検知センサIは、図4に示す上述した小便検知センサHと同じ位置に設置され、一対のセンサユニット114,114を有しており、センサユニット114,114は、所定の間隔を置いて絶縁体119により固定支持されている。
【0111】
各センサユニット114は、図37に示すように、一対のリード線118,118を有する温度センサ116と、温度センサ116の外縁を覆う導電体115とを備えており、導電体115は、一本のリード線117を有している。温度センサ116としては、例えばサーミスタ等が用いられ、導電体115としては、例えば導電性ペイント、炭素ゴム、ステンレス等が用いられる。導電体115は、温度センサ116の測定精度に影響を与えない程度の所定の厚みを持つように構成されており、またリード線118,118とリード線117とは、互いに接触しないように構成されている。すなわち、大小便検知センサIは、図36に示すように、2対のリード線118,118,118,118と一対のリード線117,117を有している。
【0112】
リード線118,118,118,118は、制御回路417と接続されており、制御回路417から電流を流すように設定されている。温度センサ116の抵抗値は、温度変化に伴い変動するので、制御回路417は、温度センサ116の抵抗値の変化に伴う電流値の変化に基づき温度を検知するように構成されている。かかる構成の下、温度センサ116が検知する温度に対して、例えば、体温に近い温度をしきい値として設定することにより、体温に近い大便及び/又は小便の温度を検知してその存在を検知することができる
リード線117,117は、電流形成手段416を介して制御回路417に接続されており、制御回路417の制御により電流形成手段416からいずれか一方だけに電流を流すように構成されている。よって、制御回路417は、導電体115,115の間が洗浄水又は小便によって通電した際の電流値に基づき水分を検知できる構成となっている。洗浄水と小便との区別は、上述した小便検知センサHと同様であるのでここでは説明を省略する。
【0113】
かかる構成により、大小便検知センサIは、温度センサ116,116が、所定の温度を検知し且つ導電体115,115の間に流れた電流値が所定の値であるときに小便を検知することができる。一方、温度検知手段116,116が所定の温度を検知し且つ導電体115,115の間に流れた電流値が所定の値でないときに大便を検知することができる。
【0114】
したがって、大小便検知センサIは、大便と小便を確実に区別して判断することができるので、大便センサGと小便センサHを併用する必要がなく、組み立て性を向上することができ、また、電気配線を簡易化することができる。
【0115】
図38及び図39に示すように、原水タンク500内では原水Wの水位センシングと共に殺菌処理を施すことができる構成としても良い。図38及び図39は、原水タンク500の内部構造を示した模式図である。原水タンク500は、その内壁面上部の所定箇所に配設された紫外線LED508と、紫外線LED508と対向する位置に配設されたフォトトランジスタ509とを備えている。紫外線LED508及びフォトトランジスタ509は、制御回路417に接続されている。制御回路417は、紫外線LED508から所定の時間間隔で紫外線UVを発信し、対向するフォトトランジスタ509で紫外線UVを受信した旨の信号に基づき、原水Wの水位センシングを行うようになっている。
【0116】
また、原水タンク500の上部には、原水Wを注水するための注水口500aが備えられ、原水タンク500下部には、出水口500bが備えられている。注水口500aは、図示しない電磁弁を介して水道の蛇口に接続されており、フォトトランジスタ509に検知信号に基づく制御回路417の制御により電磁弁の開閉を行うことで水道からの注水ができるようになっている。出水口500bは、図1に示したソレノイドバルブ503と接続されている。
【0117】
図38に示すように、原水タンク500内の原水Wが所定の水位に満たない間は、フォトトランジスタ509は、受信した紫外線UVに基づく所定の電圧値(例えば4.1V以上)を検知し、その旨の信号を制御回路417に送信する。かかる信号を受信した制御回路417は、図示しない電磁弁を開き、原水Wが注水口500aから原水タンク500内に供給される。原水タンク500内の原水Wが所定の水位に到達した場合は、図39に示すように、紫外線UVは原水W中で乱反射するので、フォトトランジスタ509を介して制御回路417が検知する電圧値が減少する(例えば、3.4V以下)。原水タンク500内の原水が所定の水位に到達した場合は、原水タンク500は、制御回路417の制御に基づき原水Wの供給を停止すると共に紫外線LED508から連続的に紫外線UVを発信し原水Wの殺菌処理を行う。
【0118】
また、図40に示すように、オムツ状ケーシングAの使用時に、オムツ状ケーシングAとセットになった寝床用マット11を用いても良い。寝床用マット11は、オムツ状ケーシングAを長時間着用する際の腰の疲れを防ぐためのもので、患者が臀部を支持プレート部100上に載置して横臥した際に、患者の腰部より上半身側を支持できるように略方形状に構成されている。寝床用マット11は、支持プレート部100と略同一の厚みを有し、側面に支持プレート部100の表面形状に応じて形成された凹部11aと、凹部11aが形成された側の端部において、凹部11aの両側に、その各端部と固定されたベルト11bとを備えている。寝床用マット11は、凹部11aに支持プレート部100を嵌合した上で、ベルト11bを立ち上がり部200の背面側に掛けることによりオムツ状ケーシングAに固定される。
【0119】
寝床用マット11の材質は、患者の腰部より上半身の負担を最小限に抑えるために低反発性の素材、例えば、ラテックスなどが用いられる。寝床用マット11の表面の所定箇所には、図示しない通気用穴が数箇所穿たれており、通気性を向上して湿疹、床擦れなどの各種肌トラブルを防止するように構成されている。また、オムツ状ケーシングAと人体が接触する部分の触感及び吸湿性を向上するために、オムツ状ケーシングAの外表面を繊維材で作られたカバーで被覆しても良い。
【0120】
上述の本実施形態においては、図1に示すように、外部エア供給フィルタ404から取り込んだ常温の空気を乾燥空気として各種ノズル104,105,202,203から噴射する構成としているが、加温された空気を噴射する構成としても良い。具体的には、各種ノズル管602,603,604,605に図示しない定温ヒーターを密着させて、定温ヒーターにより加温された空気を各種ノズル104,105,202,203から噴射する構成としても良い。
【0121】
また、上記の構成に加えて、加温された乾燥空気を噴射するための流路を別途構成しても良い。具体的には、オムツ状ケーシングAは、図41に示すように、加温された乾燥空気を送風するための乾燥空気用ノズル管201を備えた構成としても良い。乾燥空気用ノズル管201の一方の端部は、通気孔112に接続されており、他方の端部は、外観処理ホース111内に挿通している。また、外観処理ホース111は、図示しない管ヒーター付流路を介して吸入ポンプ400(図1参照)の排気口405に接続されている。吸入ポンプ400から送風される空気は、図示しない管ヒーター付流路を介して加温された後、外観処理ホース111、乾燥空気用ノズル管201を経て、通気孔112からオムツ状ケーシングA内へ乾燥空気として送風される。乾燥空気として送風された空気は、オムツ状ケーシングAの任意の箇所に設けられた通気孔122より外気へと放出される。かかる構成により、オムツ状ケーシングA内に、加温された乾燥空気を送風することができるので、オムツ状ケーシングA内の乾燥効果を向上することができる。
【図面の簡単な説明】
【0122】
【図1】本発明の実施形態にかかる自動排便処理装置の構成を示す図である。
【図2】オムツ状ケーシングの外観斜視図である。
【図3】オムツ状ケーシングの正面図である。
【図4】オムツ状ケーシングの側断面図である。
【図5】自動固定装置の分解斜視図である。
【図6】オムツ状ケーシングの内部構造の斜視図である。
【図7】尻用ノズル及び大便用ノズルの斜視図である。
【図8】ビデ用ノズルの構造の斜視図である。
【図9】肛門用ノズルの構造の斜視図である。
【図10】小便検知センサを用いて、洗浄水として使用可能な各種の水及び小便について電流値を測定した実験結果である。
【図11】重量センサの分解斜視図である。
【図12】重量センサの構造を示す拡大図である。
【図13】タンク蓋体からホース連結部を取り外した状態を示す図である。
【図14】タンク蓋体にホース連結部を接続した状態を示す図である。
【図15】ホース連結部の上部の構造の外観斜視図である。
【図16】ホース連結部の上部の構造の側面図である。
【図17】タンク蓋体の拡大斜視図である。
【図18】自動排便処理装置の自動排便処理モード時の処理手順を示すフローチャートである。
【図19】大便洗浄工程の処理手順を示すフローチャートである。
【図20】小便洗浄工程の処理手順を示すフローチャートである。
【図21】乾燥工程の処理手順を示すフローチャートである。
【図22】自動排便処理装置の手動排便処理モード時の処理手順を示すフローチャートである。
【図23】マッサージ器の構造を示す斜視図である。
【図24】埋込式自動固定装置の構造を示す分解斜視図である。
【図25】埋込式自動固定装置の押圧部が突出している状態を示す斜視図である。
【図26】埋込式自動固定装置の押圧部が人体腹部を押圧している状態を示す斜視図である。
【図27】シートベルトの構造を示す斜視図である。
【図28】腹巻、面ファスナ,カバーを用いて人体とオムツ状ケーシングとを固定する方式を示す斜視図である。
【図29】サスペンダーの構造を示す斜視図である。
【図30】前面チューブの構造を示す斜視図である。
【図31】後面チューブの構造を示す斜視図である。
【図32】前面チューブ及び後面チューブを膨張させるための空気を送り出すための流路について説明するための図である。
【図33】立ち上がり部の内部に弾性材を内挿した場合に先端部が傾倒態様を示す側面図である。
【図34】人体とオムツ状ケーシングを固定するための支持プレート部と立ち上がり部とを分離した構造について説明するための斜視図である。
【図35】図34に示した側面図である。
【図36】大小便検知センサの斜視図である。
【図37】センサユニットの斜視図である。
【図38】紫外線LED及びフォトトランジスタで原水タンクの原水の水位を検知している状態を示す概略図である。
【図39】紫外線LEDで原水タンクの原水の殺菌処理を施している状態を示す概略図である。
【図40】オムツ状ケーシングと寝床用マットとを併用している状態を示す斜視図である。
【図41】乾燥空気用ノズル管の構造を示す側断面図である。
【符号の説明】
【0123】
1 ビデ用ノズル管602に設けたソレノイドバルブ
2 肛門用ノズル管603に設けたソレノイドバルブ
3 尻用ノズル管604に設けたソレノイドバルブ
4 大便用ノズル管605に設けたソレノイドバルブ
1〜4 ユニット化した弁
5 エア排出管414とエア供給管410bの兼用で設けたソレノイドバルブ
6 外部エア供給管415と吸気管401cとの兼用で設けたソレノイドバルブ
100 支持プレート部
101 汚物流路
102 排出部
103 汚物流入管
104 尻用ノズル
105 大便用ノズル
104,105,202,203 洗浄手段
106 発光部
107 受光部
108 受信部
109 電極
110 防水用シール
111 外観処理ホース
112 通気孔
113 前面凹部
116 温度検知手段
200 立ち上がり部
201 乾燥空気用ノズル管
202 ビデ用ノズル
203 肛門用ノズル
204 マッサージ器
205 自動固定装置
300 汚物収容タンク
302 重量センサ
303 ホース連結部
304 タンク蓋体
400 吸入ポンプ
404 外部エア供給フイルタ
414 エア排出管
407a 1次悪臭除去フィルタ
407b 2次悪臭除去フィルタ
408 減圧部
409 弁
410a エア供給管
410b エア供給管
410c エア供給管
411 逆止弁
412 T字パイプ
413 圧力スイッチ
414 エア排出管
415 外部エア供給管
416 電流形成手段
417 制御回路
500 原水タンク
501 温水タンク
503 ソレノイドバルブ
600 加圧ポンプ
601 ノズル管
602 ビデ用ノズル管
603 肛門用ノズル管
604 尻用ノズル管
605 大便用ノズル管
606 ソレノイドバルブユニット
607 フィルタアセンブリ
A オムツ状ケーシング
B オムツフレーム
B1 支持フレーム
B2 縦フレーム
C 本体部
D 排泄物収容部
E 洗浄水供給部
F 装置制御部
G 大便検知センサ
H 小便検知センサ
I 大小便検知センサ
K 自動排便処理装置
G,H 検知手段
s 汚物貯留空間
【特許請求の範囲】
【請求項1】
人体の排泄部位を覆うように装着するオムツ状ケーシングと、
前記オムツ状ケーシングに配設され、流体を射出して前記オムツ状ケーシングに排泄された排泄物を前記オムツ状ケーシングから排出し、前記オムツ状ケーシングの洗浄を行うための洗浄手段とを備えた自動排便処理装置において、
前記オムツ状ケーシングから排出された排泄物を前記流体とともに収容する汚物収容部と、
前記オムツ状ケーシングから排出された排泄物を前記流体とともに前記汚物収容部に導く連結部材と、
前記汚物収容部を閉塞するための蓋体と、
前記連結部材に接続され、前記蓋体に装着される装着部と、
前記装着部に設けられた複数の電極とを有し、
前記蓋体は、前記装着部が所定の態様で装着された状態で前記装着部に係合して固定するとともに前記複数の電極同士を導通させる固定部材を有し、
前記固定部材が前記複数の電極同士を導通させると前記装着部が前記所定の態様で装着された状態で前記蓋体に固定されたことを検知する検知手段を有することを特徴とする自動排便処理装置。
【請求項2】
請求項1記載の自動排便処理装置において、
前記蓋体と前記装着部とは、互いに所定の態位を占めるときにのみ前記所定の態様で装着されることを特徴とする自動排便処理装置。
【請求項3】
請求項1又は2記載の自動排便処理装置において、
前記蓋体は、前記汚物収容部に螺合して閉塞することを特徴とする自動排便処理装置。
【請求項4】
請求項1ないし3のいずれか1つに記載の自動排便処理装置において、
前記汚物収容部の重量を検知する重量検知手段を有し、
前記重量検知手段は、前記汚物収容部を変位可能に弾性的に支持する弾性部材と、前記汚物収容部の重量に応じた変位を検知する変位検知手段とを有することを特徴とする自動排便処理装置。
【請求項1】
人体の排泄部位を覆うように装着するオムツ状ケーシングと、
前記オムツ状ケーシングに配設され、流体を射出して前記オムツ状ケーシングに排泄された排泄物を前記オムツ状ケーシングから排出し、前記オムツ状ケーシングの洗浄を行うための洗浄手段とを備えた自動排便処理装置において、
前記オムツ状ケーシングから排出された排泄物を前記流体とともに収容する汚物収容部と、
前記オムツ状ケーシングから排出された排泄物を前記流体とともに前記汚物収容部に導く連結部材と、
前記汚物収容部を閉塞するための蓋体と、
前記連結部材に接続され、前記蓋体に装着される装着部と、
前記装着部に設けられた複数の電極とを有し、
前記蓋体は、前記装着部が所定の態様で装着された状態で前記装着部に係合して固定するとともに前記複数の電極同士を導通させる固定部材を有し、
前記固定部材が前記複数の電極同士を導通させると前記装着部が前記所定の態様で装着された状態で前記蓋体に固定されたことを検知する検知手段を有することを特徴とする自動排便処理装置。
【請求項2】
請求項1記載の自動排便処理装置において、
前記蓋体と前記装着部とは、互いに所定の態位を占めるときにのみ前記所定の態様で装着されることを特徴とする自動排便処理装置。
【請求項3】
請求項1又は2記載の自動排便処理装置において、
前記蓋体は、前記汚物収容部に螺合して閉塞することを特徴とする自動排便処理装置。
【請求項4】
請求項1ないし3のいずれか1つに記載の自動排便処理装置において、
前記汚物収容部の重量を検知する重量検知手段を有し、
前記重量検知手段は、前記汚物収容部を変位可能に弾性的に支持する弾性部材と、前記汚物収容部の重量に応じた変位を検知する変位検知手段とを有することを特徴とする自動排便処理装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図33】
【図34】
【図35】
【図36】
【図37】
【図38】
【図39】
【図40】
【図41】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図33】
【図34】
【図35】
【図36】
【図37】
【図38】
【図39】
【図40】
【図41】
【公開番号】特開2008−48912(P2008−48912A)
【公開日】平成20年3月6日(2008.3.6)
【国際特許分類】
【出願番号】特願2006−228307(P2006−228307)
【出願日】平成18年8月24日(2006.8.24)
【出願人】(506230219)
【出願人】(506262380)株式会社サンヨーテック (15)
【Fターム(参考)】
【公開日】平成20年3月6日(2008.3.6)
【国際特許分類】
【出願日】平成18年8月24日(2006.8.24)
【出願人】(506230219)
【出願人】(506262380)株式会社サンヨーテック (15)
【Fターム(参考)】
[ Back to top ]