
自動排尿便処理装置
【課題】股間に装着する排尿便処理体を嵌着した支持枠体を台座の上面で左右に揺動し得るようにし、台座上で揺動可能な支持枠体の揺動角度を検知し得るようにすることにより、一定角度以上の揺動を検知した場合には尻部や局部の洗浄を停止して排尿便処理体内から洗浄水が漏洩することを可及的に防止することができる自動排尿便処理装置を提供する。
【解決手段】本発明は、寝具用ベッドの略中央に装着孔と凹状半円弧に形成し装着孔に嵌着可能とした台座と台座上に左右揺動自在に載置し得るべく形成し、尻載せパッドを載置可能とした支持枠体とU字状切欠き空間を形成した尻載せパッドと尻載せパッドに遊嵌され尻部や局部の洗浄及び排尿便の外部排出を行うべく構成した排尿便処理体とより構成し台座上で揺動可能な支持枠体に揺動角度を検知する検知手段を設け一定角度以上の揺動を検知した場合には尻部や局部の洗浄を停止すべく構成したことを特徴とする。
【解決手段】本発明は、寝具用ベッドの略中央に装着孔と凹状半円弧に形成し装着孔に嵌着可能とした台座と台座上に左右揺動自在に載置し得るべく形成し、尻載せパッドを載置可能とした支持枠体とU字状切欠き空間を形成した尻載せパッドと尻載せパッドに遊嵌され尻部や局部の洗浄及び排尿便の外部排出を行うべく構成した排尿便処理体とより構成し台座上で揺動可能な支持枠体に揺動角度を検知する検知手段を設け一定角度以上の揺動を検知した場合には尻部や局部の洗浄を停止すべく構成したことを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、寝たきりの患者や老人等が寝たままで他人の介助無しに排尿便を処理できる自動排尿便処理装置に関する。
【背景技術】
【0002】
従来、寝たきりの患者や老人等が寝たままで他人の介助無しに排尿便をしてその処理をも行えるようにするオムツや装置は種々考案されている。例えば、特許文献1には側面視略L字状の排尿便処理体に大便検知センサーと共に各種ノズルを備えた技術が開示されている。
【0003】
この技術は、排尿便する場合は、まず患者等が排尿便処理体の立ち上がり部を人体股間で挟圧しながら腰臀部を排尿便処理体上に載置するものであり、用便後は近接センサーから成る大便検知センサーで大便を感知して自動的に各種ノズルから洗浄水を噴出して局所を洗浄し、また排尿便処理体内も洗浄するものであり、大便は汚物吸入ホースから外部に排出し、このように自動的に寝たきりの患者の排便処理が行えるようにしたものである。
【0004】
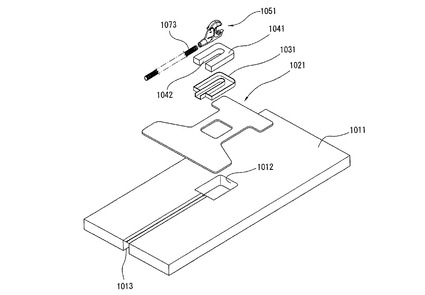
その他に本願発明者により、寝たきりの患者に装着して排尿便処理が行える自動排便処理装置が開発されている。この発明技術は、図25に示すように、ベッド1011の中央の嵌着孔1012にU字状切欠孔1042を有する尻載せパッド1041を嵌着した支持枠体1031を嵌入し、尻載せパッド1041のU字状切欠孔1042中にL字形状の排尿便処理体1051を嵌着したものであり、患者は排尿便処理体1051を股間に装着して該排尿便処理体中に排尿便を行い、所定の手段で排尿便を排尿便処理体1051外に搬送する。しかも、ベッド1011と排尿便処理体1051との間にはおしめ1021を介在させて、患者の股間を覆い汚物の飛散や漏洩を防止し、かつ、臭気の発散を防止しながら外部から見えないようにして患者の羞恥心を生起しないようにしたものである。
【特許文献1】特開平8−322868号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、上記自動排便処理装置においても、患者が排尿便時に腰部を左右に動かすことは出来ないように股間と処理装置が固定的に一体とされており、患者の尻部が所定位置よりずれるような動きをすると処理装置に負荷がかかり股間との一体化が阻害され汚物が外部に漏洩したり、各種センサーの検知精度が低下し、機能障害を生起して洗浄機能が所定の成果を挙げることができないなどの不都合が生じていた。そこで、本願発明者は、患者の股間に排尿便処理体を装着したのち同排尿便処理体を嵌着した支持枠体を寝具用ベッドに装着した台座の上面で左右に揺動し得る構造を開発した。
【0006】
しかし、このような揺動可能な構造であるため、排尿便処理体を股間に装着した患者が、排尿便を行ったのちに局部の洗浄や各種洗浄を行うと、排尿便処理体内には排尿便及び洗浄水が貯留されることとなり、この状態で排尿便処理体を嵌着した支持枠体が大きく傾いてしまうと排尿便及び洗浄水が不用意に排尿便処理体外へ漏洩してしまう虞があった。
【0007】
本願発明は、股間に装着する排尿便処理体を嵌着した支持枠体を寝具用ベッドに装着した台座の上面で左右に揺動し得るように構成し、さらに、台座上で揺動可能な支持枠体の揺動角度を検知し得るようにすることにより、一定角度以上の揺動を検知した場合には尻部や局部の洗浄を停止して排尿便処理体内から洗浄水が漏洩することを可及的に防止することができる自動排尿便処理装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
請求項1に記載の発明は、寝具用ベッドの略中央に略矩形状に形成した装着孔と、上面を凹状半円弧に形成し装着孔に嵌着可能とした台座と、凹状半円弧の台座上に左右揺動自在に載置し得るべく外底面を凸状半円弧に形成し、かつ、上面に尻載せパッドを載置可能とした支持枠体と、中央にU字状切欠き空間を形成した尻載せパッドと、尻載せパッドのU字状切欠き空間位置に遊嵌され、尻部や局部の洗浄及び排尿便の外部排出を行うべく構成した排尿便処理体とより構成し、台座上で揺動可能な支持枠体に揺動角度を検知する検知手段を設け、一定角度以上の揺動を検知した場合には尻部や局部の洗浄を停止すべく構成したことを特徴とする。
【0009】
請求項2に記載の発明は、請求項1記載の自動排尿便処理装置において、検知手段は、台座に設けた磁石の磁場を感知して揺動角度を検知するマグネチックセンサーであることを特徴とする。
【0010】
請求項3に記載の発明は、請求項1に記載の自動排尿便処理装置において、検知手段は、台座に設けた色彩を感知して揺動角度を検知する赤外線センサーであることを特徴とする。
【0011】
請求項4に記載の発明は、請求項1に記載の自動排尿便処理装置において、検知手段は、ボールの転動状態により揺動角度を検知する勾配感知センサーであることを特徴とする。
【発明の効果】
【0012】
請求項1に記載の発明によれば、台座上で揺動可能な支持枠体に揺動角度を検知する検知手段を設けるので、一定角度以上の揺動を検知した場合には尻部や局部の洗浄を停止して排尿便処理体内から洗浄水が漏洩することがなくなる効果がある。また、検知手段が検知した揺動角度が一定角度未満の場合には通常通り尻部や局部の洗浄が行える効果がある。
【0013】
請求項2に記載の発明によれば、検知手段は、台座に設けた磁石の磁場を感知して揺動角度を検知するマグネチックセンサーであるので、支持枠体が大きく傾いた際に、マグチックセンサーが磁石の磁場を検知できなくなると、洗浄を停止する信号を処理操作部に送信し、処理操作部は尻部や局部の洗浄或は排尿便の洗浄を停止することができる。そして、不用意に支持枠体が傾いたとしても洗浄水或は排尿便が排尿便処理体外へ漏洩することを可及的に防止することが可能となる。
【0014】
請求項3に記載の発明によれば、検知手段は、台座に設けた色彩を感知して揺動角度を検知する赤外線センサーであるので、支持枠体が大きく傾いた際に、赤外線センサーは、台座に照射された赤外線が吸収されて反射赤外線を検知できなくなると、洗浄を停止する信号を処理操作部に送信し、処理操作部は尻部や局部の洗浄或は排尿便の洗浄を停止することができる。そして、不用意に支持枠体が傾いたとしても洗浄水或は排尿便が排尿便処理体外へ漏洩することを可及的に防止することが可能となる。
【0015】
請求項4に記載の発明によれば、検知手段は、ボールの転動状態により揺動角度を検知する勾配感知センサーであるので、支持枠体が大きく傾いた際に、勾配感知センサーは、内部空間に設けた傾き検知を行うボールが内部壁面に接触することで、洗浄を停止する信号を処理操作部に送信し、処理操作部は尻部や局部の洗浄或は排尿便の洗浄を停止することができる。そして、不用意に支持枠体が傾いたとしても洗浄水或は排尿便が排尿便処理体外へ漏洩することを可及的に防止することが可能となる。
【発明を実施するための最良の形態】
【0016】
この発明の実施例を図面に基づき説明する。
【0017】
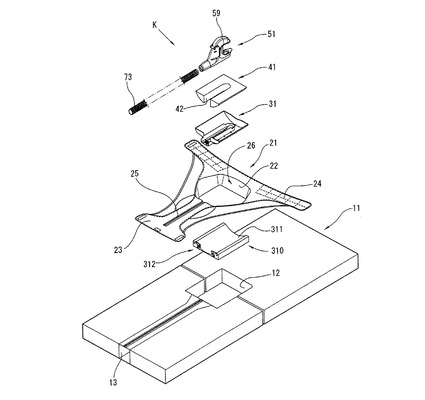
図1に示すように、Kは、本発明の実施例である自動排尿便処理装置を示すものであり、この自動排尿便処理装置Kの概要は次のように構成されている。
【0018】
すなわち、先ず患者が仰臥できるだけの面積を有したウレタン製の寝具ベッド11を用い中央に装着孔12を形成し、装着孔12の一側は、寝具ベッド11に形成したパイプ通路13と連通させている。
【0019】
装着孔12は、略矩形状に形成し、この装着孔12の周辺には、中央に装着孔12に対応した孔22を有したおしめ21を敷く。その際に、その孔22と装着孔12とを対応させて、おしめ21の下手側に延設した股間覆い部23と上手側に延設した折り返し部24とが装着孔12の外周からはみ出した状態とする。
【0020】
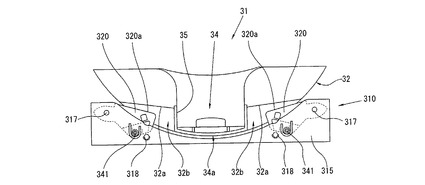
装着孔12(図1参照)には、図2に示すように、矩形状の台座310を嵌着しており、台座310の上表面は凹状半円弧とした揺動受面311を形成しており、揺動受面311の先端縁部には後述する支持枠体31の揺動範囲を規制するための調整ストッパー手段312が設けられている。
【0021】
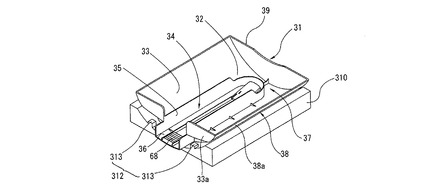
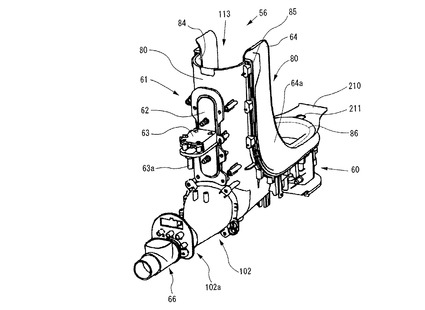
また、図2及び図3に示すように、台座310上には、以下に述べる略矩形状の支持枠体31を揺動自在に載置している。すなわち、支持枠体31の外底面38aは、凸状半円弧とした揺動底部38(図3参照)を形成し、支持枠体31には、ウレタン製の略U字型の尻載せパッド41(図1参照)を載置し、尻載せパッド41の中央のU字状切欠空間42には、略L字形状の排尿便処理体51の横部材52(図6参照)を遊嵌する。従って、支持枠体31上に尻載せパッド41及び略L字形状の排尿便処理体51を装着した状態では略L字形状の排尿便処理体51の縦部材53(図6参照)は尻載せパッド41上面より上方に突出した状態となる。さらに、後述するが支持枠体31には、揺動角度を検知する検知手段が設けられている。
【0022】
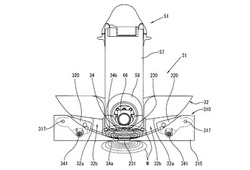
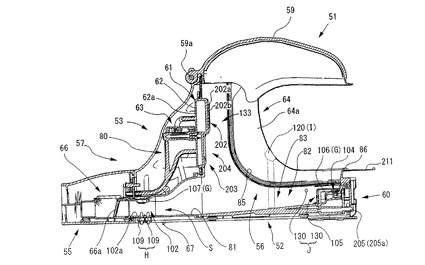
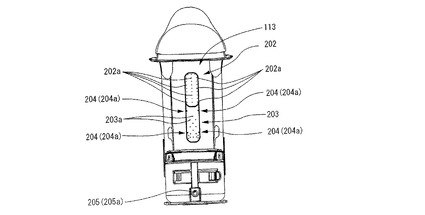
患者が本発明の自動排尿便処理装置Kを使用する際には、寝具ベッド11に仰臥し尻部を尻載せパッド41上に載置し、図8に示すように、排尿便処理体51の略L字状の縦部材53を股間に挟んで略L字状の横部材52の舟型内部に排尿、排便を行い、横部材52の頭部に設けた射水ノズル105からの排水により、尿便を排尿便処理体51外に排出し、排尿便処理体51の縦部材53に設けた洗浄ノズル203、ビデノズル202から洗浄水により尻部や局部を洗浄し、また、排尿便処理体51の横部材52に設けた尻ノズル104から洗浄水により尻部を洗浄し、その後、乾燥ノズル204、送気ノズル205からの送風により尻部や局部を乾燥するものである。
【0023】
次に、自動排尿便処理装置Kを構成する各構成部材について説明する。
【0024】
(i)装着孔12の周辺に敷設するおしめ21について説明する。
【0025】
図1に示すように、おしめ21は、中央部分に寝具ベッド11の装着孔12に対応した孔22を形成する。孔22の裏側には、方形状の箱型袋26が垂設されており、この箱型袋26は、寝具ベッド11周辺におしめ21を敷くときに中央の装着孔12中に嵌入されて、さらにその中には、後述する台座310が嵌入される。その孔22の下手側には、左右に露出した股間を覆うための股間覆い部23を延設し、同孔22の上手側には、左右に張出した折り返し部24を延設した形状としている。
【0026】
(ii)台座310について説明する。
【0027】
図2に示すように、台座310は、寝具ベッド11(図1参照)の装着孔12に嵌着しうる一定厚みの矩形状に形成されており、その上表面は凹状半円弧の揺動受面311を形成している。しかも、揺動受面311の先端縁部には揺動受面311上に揺動自在に載置する支持枠体31の揺動範囲を規制するための調整ストッパー手段312を設けている。
【0028】
すなわち、調整ストッパー手段312は、揺動受面311の先端縁部の半円弧面の左右に突起313,313を突設して、該突起313,313に後述する支持枠体31の構成部材が当接することにより、それ以上の左右揺動が行えないようにしている。
【0029】
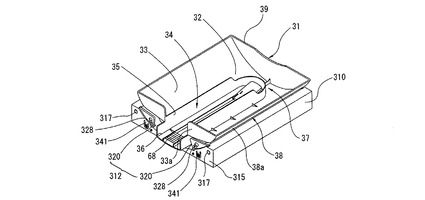
あるいは調整ストッパー手段312は、一方の係合片320の突出作動により、この一方の係合片320と後述する支持枠体31の構成部材とが当接係合して、揺動範囲が規制されるものであり、この際には他方の係合片320は埋没作動するように構成されているため、他方の係合片320と支持枠体31の構成部材とは干渉することなく、支持枠体31の揺動の支障とならない。
【0030】
(iii)支持枠体31について説明する。
【0031】
図2から図4に示すように、台座310上に載置される支持枠体31は、外底面38a(図2参照)を凸状半円弧に形成した底板32を有する矩形ケース39よりなり、上方開口の箱型としている。
【0032】
すなわち、底板32の外周縁には外周壁33が少なくとも後述する尻載せパッド41(図1参照)の厚みより低い状態で立設されている。更に底板32の中央には、長手方向に沿って帯状のガイド通路34が設けられており、両側にはガイド壁35が設けられている。
【0033】
ガイド通路34は、下手側の枠体前壁33aを突き抜けて底板32の下手終端より突出し、突出部36の終端は開放状としており、従って、支持枠体31を寝具ベッド11(図1参照)の装着孔12に装着した台座310上に載置する場合は、ガイド通路34の突出部36を装着孔12と連通したパイプ通路13内に嵌め込んでおく。
【0034】
以上のように構成された支持枠体31は、外周壁33と帯状のガイド通路34との間に略U字状のU字空間37を形成しており、U字空間37の内底面は、凹状半円弧に形成している。このU字空間37に後述する略U字状の尻載せパッド41(図1参照)が嵌着される。
【0035】
このように外底面38a(図2参照)を凸状半円弧とした支持枠体31は、内底面が凹状半円弧の台座310上に左右揺動自在に載置されて、後述するように患者の尻部や腰部の動きに応じて左右に揺動して尻部のずれを吸収する。
【0036】
しかも、図3に示すように、支持枠体31は、台座310上で患者の尻部のずれや動きに応じて揺動するものの、その揺動範囲と一定の角度に規制するために台座310の調整ストッパー手段312と協働するための構造を設けている。
【0037】
すなわち、支持枠体31の中央には、帯状のガイド通路34が設けられ、このガイド通路34は前述の如く枠体前壁33aを突き抜けて支持枠体31の枠外に突出しており、当然にその両側のガイド壁35も枠体前壁33aより突出している。
【0038】
かかる構造の支持枠体31を台座310上に載置した場合、台座310の前壁315の左右に配設した突起313,313がガイド壁35の外側面と対向する状態となる。
【0039】
従って、支持枠体31を一方向に揺動させると台座310の突起313,313先端が当接して、それ以上は揺動できない。
【0040】
なお、かかる一定範囲内の揺動ができるためには、凸状半円弧に形成した底板32の前端部の一部のみ、すなわち、底板32より前方に突出したガイド壁35の横側方において凸状半円弧の底板32の前端部のみを切欠して平坦面32aを形成しておく必要がある。
【0041】
すなわち、図5に示すように、支持枠体31が揺動していない中立位置にある場合には、この平坦面32aにより形成された空間32bは、台座310の係合片320が位置して支持枠体31の底板32と干渉せずに支持枠体31の揺動を可能とする。
【0042】
このように揺動範囲は、突出状の突起313,313がガイド壁35に当接する範囲に限定される。
【0043】
(iv)尻載せパッド41について説明する。
【0044】
尻載せパッド41(図1参照)は、支持枠体31に形成された略U字状のU字空間37に嵌着できるように同じく略U字状に形成しており、中央のU字状切欠空間42に支持枠体31のガイド通路34のガイド壁35が嵌着できる構成としている。
【0045】
かかる尻載せパッド41を支持枠体31のU字空間37に嵌着した装着孔12に嵌入装着した場合に、尻載せパッド41の略U字状中央のU字状切欠空間42には、支持枠体31のガイド通路34のガイド壁35が嵌着されるため略U字状の尻載せパッド41はガイド通路34を囲繞する状態となる。
【0046】
また、尻載せパッド41の底面は、凸状半円弧の形状としており、従って、支持枠体31内のU字空間37中に尻載せパッド41を装着する場合に支持枠体31の凹状半円弧の内底面と一致して密着した装着が可能となる。
【0047】
また、支持枠体31のU字空間37は、排尿便処理体51内より漏洩した洗浄水が尻載せパッド41の周面より浸透しても漏水を貯留させ、寝具ベッド11裏面を濡らすことを防止する効果がある。
【0048】
(v)排尿便処理体51について説明する。
【0049】
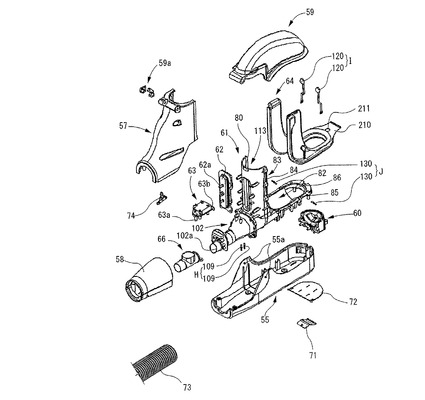
図4に示すように、排尿便処理体51は、外底面を凸状半円弧に形成した支持枠体31(図2参照)のガイド通路34に嵌着する略長手楕円形状とした支持ケース55と、同支持ケース55中に嵌入して内蔵される略L字形状の処理部本体56とより構成される。
【0050】
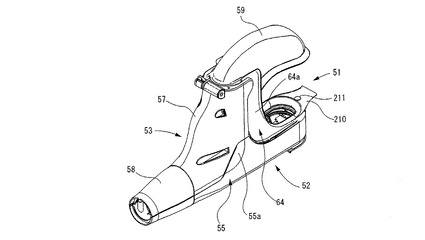
図7及び図8に示すように、支持ケース55は、周辺に周壁を形成し、その内部に後述する処理部本体56の横部材52が収納されるように長方形に形成している。同支持ケース55の左右両側壁は、中央部分を山型に隆起させ、この隆起部55a及び支持ケース55の後半部開口縁には、更に縦ケース57を嵌着連設可能に構成しており、縦ケース57は、後述する略L字状の処理部本体56の縦部材後方と処理部本体56の上面の一部をケーシングすることができるように横断面半円弧状で側面視略L字状に形成している。
【0051】
更には、支持ケース55と縦ケース57との組付けで形成される下手側端部開口には、筒状のカップリング58が連結されており、該カップリング58内には、後述する処理部本体56の下手端部に設けられた尿便の排出通路81(図8参照)及びそれに連通した排出パイプ103(図1参照)が挿入される。
【0052】
なお、排尿便処理体51の支持ケース55は支持枠体31と共に台座310上で左右に揺動するため、排尿便処理体51の排出通路81と排出パイプ103の連結部分とは、カップリング58内で回転自在となるように構成されており、従って、台座310上で揺動する排尿便処理体51の回動中心線は、排出通路81と排出パイプ103との回転連結部分の回転中心線と一致させておく必要がある。
【0053】
また、図8に示すように、処理部本体56の縦部材80後方をケーシングする縦ケース57の上端縁には、患者の局部を上方から覆うための覆体59が開閉自在に枢着されている。
【0054】
かかる処理部本体56は、図7及び図8に示すように、内部を舟型に形成した排尿便受け部82と、その下手端部に立設した洗浄ノズル保持体61とにより略L字状に形成されている。
【0055】
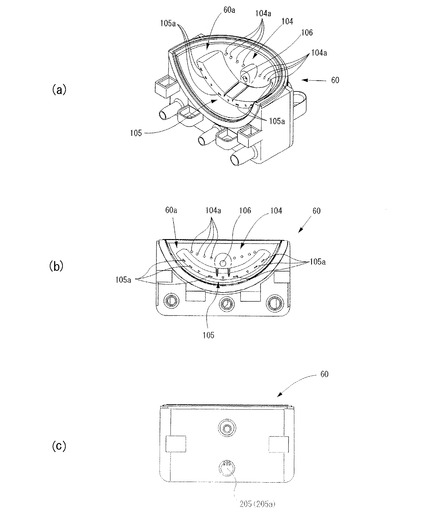
図7及び図9に示すように、排尿便受け部82の前端には、前端ノズルブラケット60が設けられており、該前端ノズルブラケット60には、排尿便受け部82に貯留された尿便を下手側方向に押しやるべく射水するための射水ノズル105が設けられており、該射水ノズル105の近傍には隣接して患者尻部下面及び腰部を乾燥するための送気ノズル205が配設されている。
【0056】
図8に示すように、排尿便受け部82の下手側終端には、排出口102aが設けられており、同排尿便受け部82に貯留された汚物を外部の貯留タンク300に排出パイプ103を介して排出する。
【0057】
また、図8及び図10に示すように、洗浄ノズル保持体61には、洗浄ノズル203、ビデノズル202、乾燥ノズル204が設けられており、何れも患者の局部あるいは肛門に向って、水や空気を送ることができるように構成されている。
【0058】
これらの各ノズルに通じるパイプ基端は、図7から図9に示すように、洗浄ノズル保持体61の裏面に突出し、洗浄ノズル保持体61の裏面に装着した分配器62の分岐パイプ62aに連通されている。更に、分配器62の裏側においては、処理部本体56の洗浄ノズル保持体61上面にヒーター部63を装着しており、分配器62に通じるエアパイプをヒーター部63を介して加熱するように構成している。
【0059】
また、図8に示すように、支持ケース55の底面の略中央部には、断面山型の係合爪67を突設すると共に、支持ケース55を嵌着する支持枠体31のガイド通路34内の底面の下手部には多段の断面山型の係合溝68(図2参照)を形成している。71は排尿便処理体51の上手側の底面を押上げる略Z形状の板ばね(図7参照)、72は板ばね71の上面に載置した略半円状の押上受板である。
【0060】
(vi)排尿便処理体51の各種ノズル及び各種センサーについて説明する。
【0061】
図6及び図9に示すように、排尿便処理体51には、人体の各部位を洗浄するため洗浄水を噴射する尻ノズル104,射水ノズル105,ビデノズル202,洗浄ノズル203と、洗浄後に人体の局部及び外部尻部を乾燥するため空気を噴射する乾燥ノズル204、送気ノズル205、さらに、着用センサーI、大便センサーG、小便センサーH、水位センサーJが各所に配置されている。
【0062】
(vi−1)各種ノズルについて詳細に説明する。
【0063】
図8及び図10に示すように、排尿便処理体51は、前面凹部113の底面の下端部に配設された洗浄ノズル203と、前面凹部113の底面の、洗浄ノズル203より上方の位置に配設されたビデノズル202を有している。また、排尿便処理体51は、排出通路81の排出部102と反対側の端部に配設された射水ノズル105と、排出通路81の排出部102と反対側の端部における射水ノズル105より上方の位置に配設された尻ノズル104を有している。
【0064】
また、これら各種パイプは、束ねて外観ホース73内に挿入される。
【0065】
患者が排便、排尿すると、排尿便処理体51は、大便センサーG、小便センサーHにより大便、小便を検知し、その検出信号を処理操作部C(図5参照)へと送信する。かかる検出信号を受信した処理操作部Cは、ビデノズルパイプ602b、洗浄ノズルパイプ603、射水ノズルパイプ605、尻ノズルパイプ602cに洗浄水を供給し、ビデノズル202、洗浄ノズル203、射水ノズル105、尻ノズル104の各々から洗浄水が排尿便処理体51内へ噴射される。さらに、処理操作部Cは、後述する排尿便処理体51の支持枠体31に設けた揺動角度を検知する検知手段から送信された信号に基づき、揺動角度が所定角度より大きいか否かの判断の処理及び音声案内を行う処理を行うようにしている。処理操作部Cは、中央演算装置と、ROM及びRAMからなる記録部と、その他必要に応じて設定される回路などを備えた制御回路を構成している。
【0066】
(vi−2)各種センサーの構成について詳述する。
【0067】
図8に示すように、排尿便処理体51は、縁部モール体64の内側面に患者の大腿部に排尿便処理体51が一定圧で密着されたことを検知する着用センサーIが配設され、さらに、排尿便処理体51には、排出通路81の、排出部102と反対側の端部に赤外線センサーの発光部106が配設され、排出部102の下手側前縁部には赤外線センサーの受光部107が配設される。これら発光部106、受光部107は、排出通路81における大便を検知する大便センサーGとして機能する。排尿便処理体51には、他に排尿便受け部82下手側底面に小便を検知する小便センサーHが配設され、また、排尿便受け部82上手側の側縁部85に排尿便受け部82内の水位を検知する水位センサーJが配設されている。
【0068】
着用センサーIは、一対の導電性ゴムで形成した電極端子120を有しており、両電極端子120,120を患者の大腿部に一定圧で密着して、人体特有の静電容量の変化により患者の大腿部に排尿便処理体が装着されたことを検知するようにしている。両電極端子120,120は、縁部モール体64のL字状の縦部における内側面に対向するように配設していると共に処理操作部Cと図示しない導電線を介して接続されている。
【0069】
そして、患者の大腿部が縁部モール体64の縁部に一定圧で密着することで、同縁部が外方へ捲れるように湾曲することにより両電極端子120,120と大腿部とが当接し圧着状態となるため検知することが可能となる。
【0070】
図8に示すように、大便センサーGは、発光部106より発信された赤外線が対向する受光部107で受信されたか否かに基づき、発光部106と受光部107の間、すなわち排出通路81に大便が存在するか否かを検知する。発光部106は、前端ノズルブラケット60の上方の中央に突設しており、射水ノズル105の中央の大便粉砕用噴射孔105aより上方位置、かつ、尻ノズル104の洗浄水が直接当たらない位置に連設されている。受光部107は、赤外線以外の周囲の光によって誤作動を起こすことを防止するために、周囲の光が届きにくい排出部102の上部に設置されている。発光部106より発信された赤外線は、排出通路81の何れの場所に大便が存在していても大便により遮られるので、受光部107が受信する赤外線の量は減少する。よって、大便センサーGは、患者の個々の体型差、排尿便処理体51の着用状態及び大便の量に関わらず確実に大便を検知することができる。
【0071】
また、図8に示すように、小便センサーHは、前後に隣り合うように配設された一対の電極ピン109,109を備えている。また、電極ピン109、109は、処理操作部Cと図示しない導電線を介して接続されており、処理操作部Cからいずれか一方の電極ピン109に微弱な電流を流すように設定されている。そして、小便センサーHは、電極ピン109,109間がかかる微弱な電流によって洗浄水又は小便を導体として通電した際の電流値を検知する構成となっている。ここで、一般に、洗浄水と小便とでは塩度の差が存在するために、電気伝導率の差が生じる。すなわち、小便センサーHが検知する電流値は、洗浄水と小便とで異なる値となる。
【0072】
小便は、水と比較して塩度が高いため、この塩度の差に対応して両者の尿センサーアウトプット値に大きな差が生じることとなる。したがって、小便センサーHによって、電極ピン109,109間の電流値を検知し、尿センサーアウトプット値に対して所定のしきい値を用いることで洗浄水と小便とを確実に判別することが可能となる。
【0073】
このような構成により、患者が排便、排尿すると、排尿便処理体51は、大便センサーG、小便センサーHにより大便、小便を検知し、その検出信号を処理操作部C(図5参照)へと送信する。かかる検出信号を受信した処理操作部Cは、ビデノズルパイプ602b,洗浄ノズルパイプ603,射水ノズルパイプ605,尻ノズルパイプ602cに洗浄水を供給し、ビデノズル202、洗浄ノズル203、射水ノズル105、尻ノズル104の各々から洗浄水が排尿便処理体51内へ噴射される。これにより、患者の尻部、局部及び肛門が洗浄される一方で、排尿便が排出部102の方へ流される。このように患者の各部位と排尿便処理体51内を洗浄する洗浄工程を終えた後に、乾燥ノズルパイプ608,送気ノズルパイプ609に空気を供給し、乾燥ノズル204、送気ノズル205から温風及び送風の空気が排尿便処理体51内へ噴射される。このように患者の尻部、局部及び肛門の乾燥がなされる乾燥工程が実行される。
【0074】
水位センサーJは、図8に示すように、排尿便受け部82内の水位を検知するため、排尿便受け部82上手側の側縁部85,85に電極ピン130,130を備えている。電極ピン130,130は、処理操作部Cと図示しない導電線を介して接続されており、処理操作部C(図5参照)からいずれか一方の電極ピン130に微弱な電流を流すように設定されている。そして、水位センサーJは、電極ピン130,130間がかかる微弱な電流によって洗浄水又は小便を導体として通電した際の電流値を検知する構成となっている。
【0075】
(vii)外部処理構成としての処理操作部Cについて説明する。
【0076】
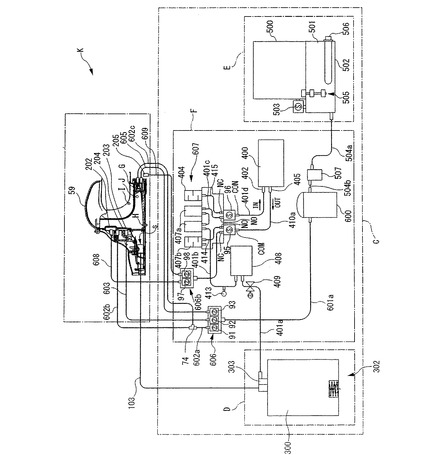
図5に示すように、処理操作部Cは、排尿便処理体51の汚物を収容する排泄物収容部Dと、排尿便処理体51から股間部と同排尿便処理体51との一定圧の密着状態を示す着用信号や排便及び/又は排尿の検出信号や排尿便受け部の水位上昇を示す水位信号を受信し、その後の洗浄動作などの各種動作を遂行するノズル操作部Fと、排尿便処理体51に洗浄水を供給する洗浄水供給部Eとよりなる。
【0077】
(vii−1)
排泄物収容部Dは、貯留タンク300を有しており、貯留タンク300は、排出パイプ103を介して、排尿便処理体51の排出口102aと接続されている。
【0078】
また、図5に示すように、ホース連結部303には、排出パイプ103と隣り合うように吸気パイプ401aが接続されている。
【0079】
(vii−2)
洗浄水供給部Eは、図5に示すように、洗浄水としての原水を供給する原水タンク500と、排尿便処理体51内に供給する洗浄水を所定温度に加熱するための温水タンク501と、原水タンク500から温水タンク501への給水を制御するソレノイドバルブ503を備えている。温水タンク501は、原水タンク500からソレノイドバルブ503を介して供給された原水を加熱する管ヒーター502と、水位を感知する水位センサー505と、水温を感知する温度センサー506とを備えている。
【0080】
洗浄水供給部Eは、温水タンク501内の原水の温度を温度センサー506で検知して、原水を管ヒーター502で加熱して温水とする。
【0081】
(vii−3)
ノズル操作部Fは、上述のように、排泄物収容部Dに吸気パイプ401aを介して接続されており、また、洗浄水供給部Eに送水パイプ504aを介して接続されている。図中の401aは吸気パイプ、409は弁としての吸気バルブ、408は減圧部としての真空タンク、401bは吸気パイプ、407aは悪臭除去フィルタ、413は圧力スイッチ、401cは吸気パイプ、401dは吸気パイプ、400は吸入ポンプ、402は吸気口、405は排気口、414はエア排出パイプ、407bは消音器である。
【0082】
一方、送水パイプ504aは、フィルタ507、送水パイプ504b、加圧ポンプ600、ノズルパイプ601a、各種ソレノイドバルブ91,92,93、三方弁74、各種ノズルパイプ602a,602b,602c,603,605を経て、排尿便処理体51内の尻ノズル104,射水ノズル105,ビデノズル202,洗浄ノズル203に接続されている。
【0083】
真空タンク408内に真空状態を形成することにより、より強い負圧を発生させて排尿便処理体51内の汚物を効率良く吸引することができる構成となっている。
【0084】
また、ソレノイドバルブ95,96、消音器404、2基の悪臭除去フィルタ407a,407a、消音器407bは1ユニット化されてフィルタアセンブリ607を構成している。
【0085】
次いで、自動排尿便処理装置Kにおける各種動作及び各種処理について説明する。
【0086】
[大便吸引動作]
大便吸引動作について説明する。先ず、吸気バルブ409を開き、吸入ポンプ400を始動し、ソレノイドバルブ91を開いた後、加圧ポンプ600を所定時間だけ稼動する。これにより、大便が貯留タンク300に吸引され、同時に、ビデの洗浄動作及びお尻の洗浄動作が開始実行される。
【0087】
すなわち、初期状態において、各種ソレノイドバルブ91,92,93とソレノイドバルブ95,96のNCポートと、吸気バルブ409と、逆止弁411とを閉じている。また、初期状態において、ソレノイドバルブ95,96のNOポートを開けている。図5に示すように、まず、吸気バルブ409を開け、吸入ポンプ400を始動する。これにより、排尿便処理体51内部の大便による臭い及び大便の一部が貯留タンク300に吸引される。同時に排尿便処理体51内の悪臭を含む空気は、逆止弁ケース66、排出パイプ103、貯留タンク300、吸入ポンプ400に向かって流れ、吸気口402前の悪臭除去フィルタ407a及び排気口405後の消音器407bを経て悪臭が除去されてから外部へ放出される。外部へ空気を排出する際に、消音器407bを備えることで、空気音を消音できると共に、2基の悪臭除去フィルタ407a,407aを並列に連通連結したので悪臭除去効果を長期に維持することができる。
【0088】
[ビデ洗浄動作、お尻洗浄動作及び肛門の洗浄動作]
ビデ洗浄動作、お尻洗浄動作及び肛門の洗浄動作について説明する。先ず、ソレノイドバルブ93を閉じ、ソレノイドバルブ91を開け、加圧ポンプ600を所定の時間だけ稼動する。これにより、温水タンク501から温水が、パイプ602aに送水され三方弁74によりビデノズルパイプ602bと尻ノズルパイプ602cに分けて送水される。一方、ビデノズルパイプ602bに送水された温水は、ビデノズル202から洗浄水として噴射され、患者の局部付近に付着した大便を洗浄する(以下、ビデ洗浄動作という)。他方、尻ノズルパイプ602cに送水された温水は、尻ノズル104から洗浄水として噴射され、患者の尻付近に付着した大便を洗浄する(以下、お尻洗浄動作という)。このとき、ビデ洗浄とお尻洗浄を同時に実行できることにより洗浄時間を短縮することが可能となる。
【0089】
次に、ソレノイドバルブ91を閉じ、ソレノイドバルブ92を開け、加圧ポンプ600を所定の時間だけ稼動する。これにより、温水タンク501から温水が、洗浄ノズルパイプ603に送水されて洗浄ノズル203から洗浄水として噴射され、患者の肛門付近に付着した大便を洗浄する(以下、肛門の洗浄動作という)。ソレノイドバルブ92を閉じ、さらに、お尻の洗浄動作及び肛門の洗浄動作を洗浄回数が2回に到達するまで繰り返す。これにより、患者のお尻及び肛門付近の洗浄を完璧に遂行することが可能となる。
【0090】
次に、洗浄回数が2回に到達すると、吸入ポンプ400を停止し、吸気バルブ409を閉じ、両洗浄動作を終了する。なお、洗浄動作において、各種ノズルから洗浄水が噴射されるとき、水位センサーJは、排尿便受け部82内における水位が一定水位以上か否かを常時検知しており、一定水位以上である場合、強制的に各種ノズルからの洗浄水の噴射を停止し、排尿便受け部82内の汚物を排出パイプ103を介して貯留タンク300内へ強制的に吸引、収容するように実行されるものである。ここでの処理は、後述する図18のステップS17〜S20において実行される。
【0091】
[大便粉砕処理]
大便粉砕処理について説明する。先ず、ソレノイドバルブ91を閉じ、ソレノイドバルブ93を開き、次いで、吸気バルブ409を閉じた後、吸入ポンプ400を稼動する。これにより、真空タンク408内の真空形成を開始する。
【0092】
そして、所定時間経過後に、加圧ポンプ600を稼動し、原水タンク500中の温水タンク501から送水された温水を、射水ノズルパイプ605を介して射水ノズル105から洗浄水として噴射し、大便粉砕処理を実行する。大便粉砕処理によって粉砕され、排出通路81方向に押しやられた大便は、汚物貯留空間Sで過流現象により洗浄水と十分に混合される(以下、過流現象による混合動作という)。そして、圧力スイッチ413に基づく内部圧力の検出値が最大真空圧(例えば、600mmHg)に到達するまで待った後、圧力スイッチ413からの検知信号に基づき図示しない制御回路を介して加圧ポンプ600を稼動し、吸気バルブ409を開く。この瞬間、真空タンク408に形成された最大真空圧により、排尿便受け部82において、大便を含む洗浄水の流れが滞り、大便を含む洗浄水が上下に旋回するような渦巻き状の流れを生じる過流現象となり、混合動作後の大便は、一層細かく粉砕されて洗浄水と十分に混合されると同時に、排尿便処理体51内で特に汚物が付着しやすい排出部102付近が十分に洗浄されて、排出部102から逆止弁ケース66、排出パイプ103を介して貯留タンク300に一気に吸入収容される(以下、真空吸入動作という)。なお、逆止弁ケース66は、大便の吸入時に逆流防止弁66aが自重に抗して開弁して大便や臭気等を吸入収容し、吸入終了後は、自重により閉弁して大便やその臭気を遮断することで常に排尿便処理体内の衛生状態が向上することとなる。
【0093】
その後、加圧ポンプ600を停止し、吸入ポンプ400を停止し、次いで、ソレノイドバルブ93を閉じた後、吸気バルブ409を閉じる。ここでの処理は、後述する図18のステップS13、S15、S21において実行される。
【0094】
[内部乾燥処理]
内部乾燥処理について説明する。先ず、吸気バルブ409を閉じ、ソレノイドバルブ97、ソレノイドバルブ95,96のNCポートを開いた後、吸入ポンプ400を所定時間稼動する。消音器404から取り込まれた空気を、一方、エア供給パイプ601b、ソレノイドバルブ97、乾燥ノズルパイプ608を経てヒーター部63で温め温風の乾燥空気として乾燥ノズル204から送り出して、乾燥空気で人体の局部、尻部及び排尿便処理体51内の乾燥を行うようにしている。吸入ポンプ400を所定時間だけ稼動すると、ソレノイドバルブ97、ソレノイドバルブ95,96のNCポートを閉じる。
【0095】
ソレノイドバルブ98、ソレノイドバルブ95,96のNCポートを開いた後、吸入ポンプ400を所定時間稼動する。消音器404から取り込まれた空気を、エア供給パイプ601b、ソレノイドバルブ98、送気ノズルパイプ609を経て、送風の乾燥空気として送気ノズル205から送り出して、乾燥空気で人体の尻部及び腰部の乾燥を行うようにしている。吸入ポンプ400を所定時間だけ稼動すると、ソレノイドバルブ98、ソレノイドバルブ95,96のNCポートを閉じ乾燥を終了する。ここでの処理は、後述する図18のステップS22及び図19のステップS47において実行される。
【0096】
[小便吸引動作]
小便吸引動作について説明する。先ず、吸気バルブ409を開き、吸入ポンプ400を始動し、ソレノイドバルブ91を開いた後、加圧ポンプ600を所定時間だけ稼動する。これにより、小便が貯留タンク300に吸引され、同時に、お尻の洗浄動作及びビデの洗浄動作が開始実行される。
【0097】
[小便洗浄処理]
小便洗浄処理について説明する。先ず、ソレノイドバルブ91を閉じ、ソレノイドバルブ93を開き、次いで、吸気バルブ409を閉じた後、吸入ポンプ400を稼動する。これにより、真空タンク408内の真空形成を開始する。
【0098】
そして、所定時間経過後に、加圧ポンプ600を稼動し、原水タンク500中の温水タンク501から送水された温水を、射水ノズルパイプ605を介して射水ノズル105から洗浄水として噴射し、小便を排出通路81方向に押しやる。そして、ほぼ同時に、吸気バルブ409を開く。この瞬間、真空タンク408に形成された最大真空圧により、小便は、排出口102aから逆止弁ケース66、排出パイプ103を介して貯留タンク300に一気に吸入収容される。
【0099】
その後、加圧ポンプ600を停止し、吸入ポンプ400を停止し、次いで、ソレノイドバルブ93を閉じた後、吸気バルブ409を閉じる。
【0100】
自動排尿便処理装置Kの構造及びその排尿便の処理工程は、以上説明したように行われるものであるが、本発明の特徴とするのは、かかる構造のうち台座310上の支持枠体31の過度な揺動があった場合に、処理工程中の洗浄動作を停止することにある。すなわち、台座310には、支持枠体31の揺動を規制する調整ストッパー手段312,312を設ける構成としたが、この調整ストッパー手段312の係合片320を台座310裏面に埋没させて揺動規制を解除した状態において、患者が腰部を大きくずらしたり捻ったりした場合に、支持枠体31を大きく揺動させて洗浄動作を行うと、洗浄水が排尿便処理体51外へ漏洩して、寝具ベッド11やおむつ21を汚損してしまう虞があり、そこで、かかる状態になっても患者が洗浄処理を快適に行うために次のような技術を開発するに至った。
【0101】
すなわち、本発明の特徴とするものは、かかる支持枠体31に揺動状態を検知する検知手段を設け、排尿便処理体51の支持枠体31が一定以上の範囲で揺動していることを検知したときに、後述する大便処理工程或は小便処理工程における各洗浄動作を停止する構成としたことにある。
【0102】
上記支持枠体31の揺動状態を検知する検知手段としては、後述するマグネチックセンサー230、赤外線センサー240、勾配感知センサー250を用いるようにした。その他に検知手段としては、揺動角度を直接算出する角度センサー等の電子デバイスを用いるようにしてもよい。
【0103】
先ず、上記大便処理工程或は小便処理工程における洗浄動作の停止制御について説明する。なお、小便処理工程における洗浄動作の停止制御については、上述した大便処理工程における洗浄動作の停止制御の説明と同様であり重複説明を省略する。
【0104】
大便処理工程或いは小便処理工程における上記ビデ洗浄動作中及び上記お尻洗浄動作中において、処理操作部Cによる上記洗浄動作を停止する制御に基づき、先ず、ソレノイドバルブ91を開いた状態から閉じて、加圧ポンプ600の稼動を停止する。これにより、温水タンク501からパイプ602a、三方弁74、ビデノズルパイプ602bと尻ノズルパイプ602cへの温水の送水が停止される。すなわち、ビデノズルパイプ602bを介してビデノズル202から患者の局部付近に噴射されていた洗浄水が停止される(ビデ洗浄動作の停止)。さらに、尻ノズルパイプ602cを介して尻ノズル104から患者の尻付近に噴射されていた洗浄水が止水される(お尻洗浄動作の停止)。
【0105】
一方、肛門の洗浄動作中においては、ソレノイドバルブ91を閉じて、ソレノイドバルブ92を開けることで洗浄ノズル203から洗浄水が噴射されている。そして、処理操作部Cによる上記洗浄動作を停止する制御に基づき、先ず、ソレノイドバルブ92を閉じ、加圧ポンプ600の稼動を停止する。これにより、温水タンク501から洗浄ノズルパイプ603への温水の送水が停止され、洗浄ノズル203から患者の肛門付近に噴射されていた洗浄水が止水される(肛門の洗浄動作の停止)。
【0106】
また、大便の粉砕処理中においては、加圧ポンプ600を稼動し、原水タンク500中の温水タンク501から送水された温水を、射水ノズルパイプ605を介して射水ノズル105から洗浄水として噴射している。そして、処理操作部Cによる上記洗浄動作を停止する制御に基づき、先ず、ソレノイドバルブ93を閉じ、加圧ポンプ600の稼動を停止する。これにより、温水タンク501から射水ノズルパイプ605への温水の送水が停止され、射水ノズル105から排出通路81に噴射されていた洗浄水が止水される(大便粉砕の洗浄動作の停止)。
【0107】
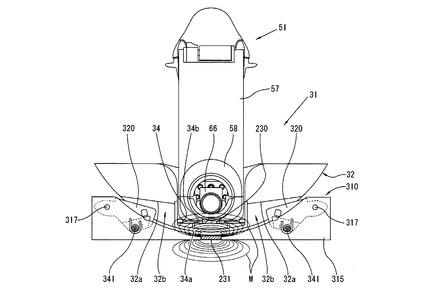
[実施例1]
上記検知手段としては、図12に示すように、台座310に設けた磁石231の磁場Mを感知して揺動角度を検知するマグネチックセンサー230を設ける。
【0108】
磁石231は、台座310の幅方向の中央位置に設けられており、上方の支持枠体31に向けて磁場Mを発生するようにしている。
【0109】
マグネチックセンサー230は、支持枠体31のガイド通路34の挿通孔34aに設けることとした。このマグネチックセンサー230は、支持枠体31の揺動角度に応じて磁石231から発生する磁場Mを感知し、揺動角度に応じた所定の信号を処理操作部Cに送信する。なお、マグネチックセンサー230は、処理操作部Cと配線(図示しない)で接続している。
【0110】
次に支持枠体31の各揺動角度におけるマグネチックセンサー230の作動状態について説明する。
【0111】
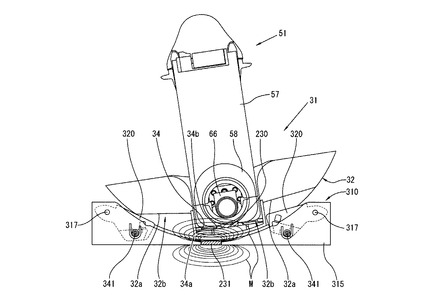
図12は、台座310に対する支持枠体31の基準点となる揺動角度0°の状態を示し、図13は、台座310に対する支持枠体31が小さく揺動して、支持枠体31の揺動角度5°の状態を示している。
【0112】
支持枠体31の揺動角度が0°〜14°において、マグネチックセンサー230は、磁石231の磁場Mを感知し、所定の信号を処理操作部Cに送信する。処理操作部Cは、後述するマグネチックセンサー230から送信された揺動角度が一定角度以上か否かの判断を行い、すなわち、揺動角度0°〜14°が一定角度より小さいために、後述する大便処理工程(図18参照)或は小便処理工程(図19参照)における各洗浄動作を開始する処理を行うこととなる。
【0113】
すなわち、大便処理工程或は小便処理工程において、処理操作部Cによる上記洗浄動作を開始する制御に基づき、先ず、ソレノイドバルブ93を閉じ、ソレノイドバルブ91を開け、加圧ポンプ600を所定の時間だけ稼動する。これにより、温水タンク501から温水が、パイプ602aに送水され三方弁74によりビデノズルパイプ602bと尻ノズルパイプ602cに分けて送水される。一方、ビデノズルパイプ602bに送水された温水は、ビデノズル202から洗浄水として噴射され、患者の局部付近に付着した大便を洗浄する(ビデ洗浄動作)。他方、尻ノズルパイプ602cに送水された温水は、尻ノズル104から洗浄水として噴射され、患者の尻付近に付着した大便を洗浄する(お尻洗浄動作)。
【0114】
次に、ソレノイドバルブ91を閉じ、ソレノイドバルブ92を開け、加圧ポンプ600を所定の時間だけ稼動する。これにより、温水タンク501から温水が、洗浄ノズルパイプ603に送水されて洗浄ノズル203から洗浄水として噴射され、患者の肛門付近に付着した大便を洗浄する(肛門の洗浄動作)。ソレノイドバルブ92を閉じ、さらに、お尻の洗浄動作及び肛門の洗浄動作を洗浄回数が2回に到達するまで繰り返し行われる。
【0115】
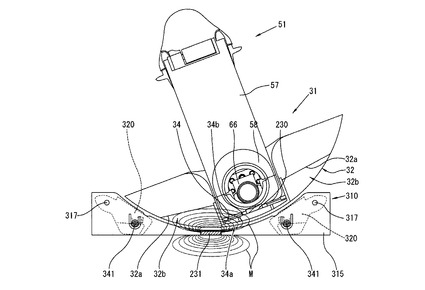
一方、患者が腰部を大きく捻った際、台座310に対する支持枠体31が大きく揺動してしまい、台座310に対する支持枠体31の揺動角度15°の場合(図14参照)において、マグネチックセンサー230は、磁石231の磁場Mを感知できず、このとき所定の信号を処理操作部Cに送信する。処理操作部Cは、後述するマグネチックセンサー230から送信された揺動角度15°が一定角度以上か否かの判断を行い、揺動角度15°が一定角度より大きいと判断すると、後述する大便処理工程(図18参照)或は小便処理工程(図19参照)における各洗浄動作を停止する制御を行う。
【0116】
すなわち、大便処理工程或は小便処理工程における上記ビデ洗浄動作中及び上記お尻洗浄動作中において、処理操作部Cによる上記洗浄動作を停止する制御に基づき、先ず、ソレノイドバルブ91を開いた状態から閉じて、加圧ポンプ600の稼動を停止する。これにより、温水タンク501からパイプ602a、三方弁74、ビデノズルパイプ602bと尻ノズルパイプ602cへの温水の送水が停止される。すなわち、ビデノズルパイプ602bを介してビデノズル202から患者の局部付近に噴射されていた洗浄水が停止される(ビデ洗浄動作の停止)。さらに、尻ノズルパイプ602cを介して尻ノズル104から患者の尻付近に噴射されていた洗浄水が止水される(お尻洗浄動作の停止)。
【0117】
一方、肛門の洗浄動作中においては、ソレノイドバルブ91を閉じて、ソレノイドバルブ92を開けることで洗浄ノズル203から洗浄水が噴射されている。そして、処理操作部Cによる上記洗浄動作を停止する制御に基づき、先ず、ソレノイドバルブ92を閉じ、加圧ポンプ600の稼動を停止する。これにより、温水タンク501から洗浄ノズルパイプ603への温水の送水が停止され、洗浄ノズル203から患者の肛門付近に噴射されていた洗浄水が止水される(肛門の洗浄動作の停止)。
【0118】
また、大便の粉砕処理中においては、加圧ポンプ600を稼動し、原水タンク500中の温水タンク501から送水された温水を、射水ノズルパイプ605を介して射水ノズル105から洗浄水として噴射している。そして、処理操作部Cによる上記洗浄動作を停止する制御に基づき、先ず、ソレノイドバルブ93を閉じ、加圧ポンプ600の稼動を停止する。これにより、温水タンク501から射水ノズルパイプ605への温水の送水が停止され、射水ノズル105から排出通路81に噴射されていた洗浄水が止水される(大便粉砕の洗浄動作の停止)。
【0119】
かかる構成によれば、患者が腰部や尻部を大きく捻った際に、その揺動を検知手段により検知し、検知した揺動角度が一定角度以上であるなら上記各洗浄動作を停止するため、排尿便処理体51内に貯留される洗浄水の水位が不用意に上昇するのを防止し、さらに、排尿便処理体51内から洗浄水が漏洩しておむつや寝具ベッド11を汚損することがなくなり、常に清潔に使用することが可能となる効果がある。
【0120】
[実施例2]
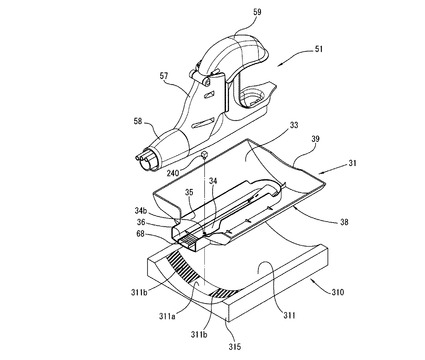
検知手段としては、図15に示すように、台座310に設けた色彩を感知して揺動角度を検知する赤外線センサー240とした。この赤外線センサー240は、支持枠体31のガイド通路34の挿通孔34aに設けており、赤外線を揺動受面311に照射する発光部(図示せず)と揺動受面311に反射された赤外線を受光する受光部(図示せず)とを備えている。さらに、台座310の上手側の揺動受面311には、赤外線を反射する反射領域311aと赤外線を吸収する吸収領域311bを設けており、この左右の吸収領域311bには、赤外線を吸収する特定の色彩が塗布されている。揺動受面311に設けた反射領域311aは、例えば、支持枠体31の揺動角度が0°から±14°の領域に設けられ、一方、吸収領域311bは、支持枠体31の揺動角度が±14°より大きい曲面領域に設けられる。なお、特定の色彩としては、赤外線を吸収する黒色とすることが好ましい。
【0121】
支持枠体31の揺動角度0°〜±14°の場合において、赤外線センサー240は、発光部から赤外線を揺動受面311に出射すると同揺動受面311の反射領域311aに反射された赤外線を受光部が受光すると、所定の信号を処理操作部Cに送信する。処理操作部Cは、後述する赤外線センサー240から送信された揺動角度が所定角度より大きいか否かの判断を行い、揺動角度が所定角度より小さいと判断すると、大便処理工程或は小便処理工程における各洗浄動作を開始する制御を行う。ここでの処理は、上記実施例1で説明した内容と同様なため重複説明を省略する。
【0122】
一方、支持枠体31の揺動角度±15°以上の場合において、赤外線センサー240は、発光部から赤外線を出射すると同揺動受面311の吸収領域311bに吸収されてしまい受光部が反射赤外線を受光できず、このとき所定の信号を処理操作部Cに送信する。処理操作部Cは、赤外線センサー240から送信された揺動角度が所定角度より大きいか否かの判断を行い、揺動角度が所定角度より大きいと判断すると、後述する大便処理工程(図18参照)或は小便処理工程(図19参照)における各洗浄動作を停止する制御を行う。ここでの処理は、上記実施例1で説明した内容と同様なため重複説明を省略する。
【0123】
[実施例3]
検知手段としては、図16に示すように、ボール255の転動状態により揺動角度を検知する勾配感知センサー250とした。勾配感知センサー250は、処理部本体56の洗浄ノズル保持体61の外側に設けており、内部空間253に凹部252を設けたケーシング251と、ケーシング251内に収容され、支持枠体31の揺動角度を感知するボール255とを備えている。
【0124】
支持枠体31の揺動角度0°〜±14°の場合において、ボール255は凹部252に収容された状態となり、勾配感知センサー250は、所定の信号を処理操作部Cに送信する。処理操作部Cは、勾配感知センサー250から送信された揺動角度が所定角度より大きいか否かの判断を行い、揺動角度が所定角度より小さいと判断すると、後述する大便処理工程或は小便処理工程における各洗浄動作を開始する制御を行う。ここでの処理は、上記実施例1で説明した内容と同様なため重複説明を省略する。
【0125】
一方、支持枠体31の揺動角度が±15°以上の場合において、ボール255が凹部252から脱して内部側壁254に接触した状態となり、勾配感知センサー250は、所定の信号を処理操作部Cに送信する。処理操作部Cは、勾配感知センサー250から送信された揺動角度が所定角度より大きいか否かの判断を行い、揺動角度が所定角度より大きいと判断すると、後述する大便処理工程(図18参照)或は小便処理工程(図19参照)における各洗浄動作を停止する制御を行う。ここでの処理は、上記実施例1で説明した内容と同様なため重複説明を省略する。
【0126】
[メイン処理工程]
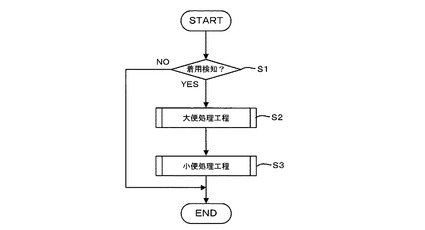
自動排尿便処理装置Kのメイン処理工程について説明する。図17は、自動排便処理モード時の自動排尿便処理装置Kのメイン処理工程を示すフローチャートである。
【0127】
自動排尿便処理装置Kの電源スイッチ(図示しない)を操作すると、着用センサーIの検出信号に基いて、患者の股間部分が両電極端子120,120に一定圧で密着しているか否かを判断する(ステップS1)。電極端子120,120に一定圧で密着している場合は、次のステップS2の大便検知処理工程に進む。一方、電極端子120,120に一定圧で密着していない場合は、本メインフローを終了する。
【0128】
ステップS2において、後述するサブルーチンの大便処理工程が実行された後、ステップS3の小便処理工程に進む。
【0129】
ステップS3において、後述するサブルーチンの小便処理工程が実行された後、本メインフローを終了する。
【0130】
[大便処理工程]
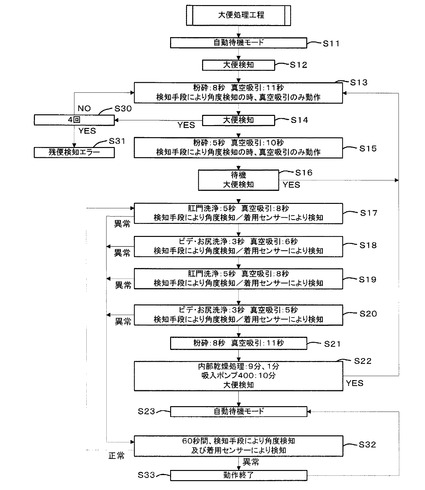
以下、上記大便処理工程について詳細に説明する。図18は、大便洗浄工程の自動処理手順を示すフローチャートである。
【0131】
ステップS11の自動待機モードでは、着用状態を検知したのち大便センサーGが作動開始し、大便センサーGが大便を検知するまで待機状態となる。そして、大便センサーGが大便を検知するとステップS12の大便検知に進む。
【0132】
ステップS12において、処理操作部Cは、大便センサーGの検出値に基づいて、排出通路81に大便が検知するとステップS13に進む。
【0133】
ステップS13において、処理操作部Cは、検知手段が検知した支持枠体31の揺動角度が一定角度未満の場合に、大便粉砕処理を実行し、大便の粉砕処理後に真空吸引を行う。例えば、粉砕を8秒行い、その後、真空吸引を11秒行う。
【0134】
また、検知手段が検知した支持枠体31の揺動角度が一定角度以上の場合には、例えば、大きく傾いた支持枠体31の揺動角度15°以上の場合は処理操作部Cによる上記洗浄動作を停止する制御に基づき、大便粉砕処理中の大便粉砕の洗浄動作を停止し、真空吸引の動作のみを実行する。すなわち、真空吸引は、吸気バルブ409を開き、吸入ポンプ400を始動し、ソレノイドバルブ91を開いた後、加圧ポンプ600を所定時間だけ稼動する。これにより、大便が貯留タンク300に吸引される。
【0135】
ステップS14において、処理操作部Cは、大便センサーGの検出値に基づいて、排出通路81に大便が検知されるとステップS30に処理を移す。一方、大便が検知されてないとステップS15に処理を移す。
【0136】
ステップS15において、処理操作部Cは、検知手段が検知した支持枠体31の揺動角度が一定角度未満の場合に、上記の大便粉砕処理を実行し、大便の粉砕処理後に真空吸引を行う。例えば、粉砕を5秒行い、その後、真空吸引を10秒行う。
【0137】
一方、処理操作部Cは、検知手段が検知した支持枠体31の揺動角度が一定角度以上の場合に、例えば、大きく傾いた支持枠体31の揺動角度15°以上の場合は、処理操作部Cによる上記洗浄動作を停止する制御に基づき、大便粉砕処理中の大便粉砕の洗浄動作を停止し、真空吸引の動作のみを実行する。すなわち、真空吸引は、吸気バルブ409を開き、吸入ポンプ400を始動し、ソレノイドバルブ91を開いた後、加圧ポンプ600を所定時間だけ稼動する。これにより、大便が貯留タンク300に吸引される。
【0138】
ステップS16において、処理操作部Cは、所定時間待機し、大便センサーGの検出値に基づいて、排出通路81に大便が検知されない場合にステップS17に処理を移す。
【0139】
ステップS17において、処理操作部Cは、検知手段が検知した支持枠体31の揺動角度が一定角度未満の場合及び着用センサーIが検出信号を検知している場合に、上記の肛門の洗浄動作を実行し、真空吸引を行う。例えば、肛門洗浄を5秒行い、その後、真空吸引を8秒行う。
【0140】
一方、検知手段が検知した支持枠体31の揺動角度が一定角度以上となる異常の場合、及び着用センサーIが検出信号を検知できない異常の場合、例えば、大きく傾いた支持枠体31の揺動角度15°以上の場合は、処理操作部Cによる上記洗浄動作を停止する制御に基づき、肛門の洗浄動作を停止し、ステップS32に処理を移す。
【0141】
ステップS18において、処理操作部Cは、検知手段が検知した支持枠体31の揺動角度が一定角度未満の場合及び着用センサーIが検出信号を検知している場合に、上記のビデ洗浄動作及び上記のお尻洗浄動作を実行し、真空吸引を行う。例えば、ビデ洗浄・お尻洗浄を3秒行い、その後、真空吸引を6秒行う。
【0142】
一方、検知手段が検知した支持枠体31の揺動角度が一定角度以上となる異常の場合、又は着用センサーIが検出信号を検知できない異常の場合、例えば、大きく傾いた支持枠体31の揺動角度15°以上の場合は、処理操作部Cによる上記洗浄動作を停止する制御に基づき、上記のビデ洗浄動作及び上記のお尻洗浄動作を停止し、ステップS32に処理を移す。
【0143】
ステップS19において、処理操作部Cは、検知手段が検知した支持枠体31の揺動角度が一定角度未満の場合及び着用センサーIが検出信号を検知している場合に、上記の肛門の洗浄動作を実行し、真空吸引を行う。例えば、肛門洗浄を5秒行い、その後、真空吸引を8秒行う。
【0144】
一方、検知手段が検知した支持枠体31の揺動角度が一定角度以上となる異常の場合、及び着用センサーIが検出信号を検知できない異常の場合、例えば、大きく傾いた支持枠体31の揺動角度15°以上の場合は、処理操作部Cによる上記洗浄動作を停止する制御に基づき、肛門の洗浄動作を停止し、ステップS32に処理を移す。
【0145】
ステップS20において、処理操作部Cは検知手段が検知した支持枠体31の揺動角度が一定角度未満の場合及び着用センサーIが検出信号を検知している場合に、上記のビデ洗浄動作及び上記のお尻洗浄動作を実行し、真空吸引を行う。例えば、ビデ洗浄・お尻洗浄を3秒行い、その後、真空吸引を5秒行う。
【0146】
一方、検知手段が検知した支持枠体31の揺動角度が一定角度以上となる異常の場合、又は着用センサーIが検出信号を検知できない異常の場合、例えば、大きく傾いた支持枠体31の揺動角度15°以上の場合は、処理操作部Cによる上記洗浄動作を停止する制御に基づき、上記のビデ洗浄動作及び上記のお尻洗浄動作を停止し、ステップS32に処理を移す。
【0147】
ステップS21において、上記の大便粉砕処理を実行し、大便の粉砕処理後に真空吸引を行う。例えば、粉砕を8秒行い、その後、真空吸引を11秒行う。
【0148】
ステップS22において、上記の内部乾燥処理を実行し、排尿便処理体51内における患者の局部の乾燥を行う。例えば、内部乾燥を9分行い、その後、さらに1分行う。そのとき吸入ポンプ400を10分稼働する。なお、大便センサーGが大便を検知するとステップS13へ戻り処理を繰り返し行う。
【0149】
ステップS23において、自動待機モードとなる。その後、図17のメインフローに処理を戻す。
【0150】
ステップS32において、上記ステップS17、ステップS18、ステップS19及びステップS20における異常の場合の処理を行う。すなわち、例えば60秒間、支持枠体31の揺動角度を検知するように検知手段を作動して、一定の揺動角度以上の角度が検知されない場合、及び着用センサーIが検出信号を検出した場合は、ステップS17に戻り再度処理を行う。一方、検知手段が一定の揺動角度以上の角度を検知した場合、及び着用センサーIが検出信号を検出しない場合は、処理操作部Cは異常であると判断して、動作終了となる(ステップS33)。
【0151】
なお、ステップS30において、ステップS14における大便が検知され、4回目の大便検知であると便残留エラーを報知する(ステップS31)。一方、4回目未満の大便の検知である場合は、ステップS13に戻り処理を繰り返す。
【0152】
なお、排尿便処理体51が大きく傾き、検知手段の検知した揺動角度が一定角度以上である場合に、さらに処理操作部Cは、スピーカー(図示しない)を介して患者に排尿便処理体51を水平状態に戻す旨の音声案内を行うようにしてもよい。例えば、「排尿便処理体を水平状態に戻してください。」等の音声案内が行われる。
【0153】
[小便処理工程]
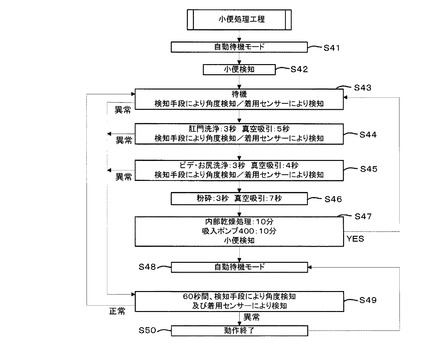
以下、上記小便処理工程について詳細に説明する。図19は、小便洗浄工程の自動処理手順を示すフローチャートである。
【0154】
ステップS41の自動待機モードでは、着用状態を検知したのち小便センサーHが作動開始し、小便センサーHが小便を検知するまで待機状態となる。そして、小便センサーHが小便を検知するとステップS42の小便検知に処理を移す。
【0155】
ステップS42において、処理操作部Cは、小便センサーHの検出値に基づいて、排出通路81に小便が検知されるとステップS43に処理を移す。
【0156】
ステップS43において、検知手段が検知した支持枠体31の揺動角度を所定の信号として処理操作部Cに送信するとステップS44に処理を移す。一方、検知手段が検知した支持枠体31の揺動角度が一定角度以上となる異常の場合、及び着用センサーIが検出信号を検知できない異常の場合、例えば、大きく傾いた支持枠体31の揺動角度15°以上の場合は、ステップS49に処理を移す。
【0157】
ステップS44において、処理操作部Cは、検知手段が検知した支持枠体31の揺動角度が一定角度未満の場合及び着用センサーIが検出信号を検知している場合に上記の肛門洗浄動作を実行し、真空吸引を行う。例えば、肛門洗浄を3秒行い、その後、真空吸引を5秒行う。
【0158】
一方、検知手段が検知した支持枠体31の揺動角度が一定角度以上となる異常の場合、及び着用センサーIが検出信号を検知できない異常の場合、例えば、大きく傾いた支持枠体31の揺動角度15°以上の場合は、処理操作部Cにより上記の洗浄動作を停止する制御に基づき、上記の肛門洗浄動作を停止し、ステップS49に処理を移す。
【0159】
ステップS45において、処理操作部Cは、検知手段が検知した支持枠体31の揺動角度が一定角度未満の場合及び着用センサーIが検出信号を検知している場合に上記のビデ洗浄動作及び上記のお尻洗浄動作を実行し、真空吸引を行う。例えば、各ビデ洗浄及び上記のお尻洗浄を3秒行い、その後、真空吸引を4秒行う。
【0160】
一方、検知手段が検知した支持枠体31の揺動角度が一定角度以上となる異常の場合、及び着用センサーIが検出信号を検知できない異常の場合、例えば、大きく傾いた支持枠体31の揺動角度15°以上の場合は、処理操作部Cにより上記洗浄動作を停止する制御に基づき、上記のビデ洗浄動作及び上記のお尻洗浄動作を停止し、ステップS49に処理を移す。
【0161】
ステップS46において、上記の大便粉砕処理を実行し、大便の粉砕処理後に真空吸引を行う。例えば、粉砕を3秒、真空吸引を7秒行う。
【0162】
ステップS47において、上記の内部乾燥処理を実行し、排尿便処理体51内における患者の局部の乾燥を行う。例えば、内部乾燥を9分行い、その後、さらに1分行う。そのとき吸入ポンプ400を10分稼働する。なお、小便センサーHが小便を検知するとステップS43へ戻り処理を繰り返し行う。
【0163】
ステップS48において、自動待機モードとなる。その後、図17のメインフローに処理を戻す。
【0164】
ステップS49において、上記ステップS43、ステップS44、ステップS45における異常の場合の処理を行う。すなわち、例えば60秒間、支持枠体31の揺動角度を検知するように検知手段を作動して、一定の揺動角度以上の角度が検知されない場合、及び着用センサーIが検出信号を検出した場合は、ステップS43に戻り再度処理を行う。一方、検知手段が一定の揺動角度以上の角度を検知した場合、及び着用センサーIが検出信号を検出しない場合は、処理操作部Cは異常であると判断して、動作終了となる(ステップS50)。
【0165】
なお、排尿便処理体51が大きく傾き、検知手段の検知した揺動角度が一定角度以上である場合に、さらに処理操作部Cは、患者に排尿便処理体51を水平状態に戻す旨の音声案内を行うようにしてもよい。例えば、「排尿便処理体を水平状態に戻してください。」等の音声案内が行われる。
【0166】
図17〜図19を用いて、自動排尿便処理装置Kの自動処理手順を説明したが、以下、手動処理の手順について図20〜図24に基いて説明する。
【0167】
図20は大便洗浄工程の手動処理手順を示すフローチャート、図21は洗浄工程の手動処理手順を示すフローチャート、図22は小便洗浄工程の手動処理手順を示すフローチャート、図23はビデ洗浄工程の手動処理手順を示すフローチャート、図24は乾燥工程の手動処理手順を示すフローチャートである。
【0168】
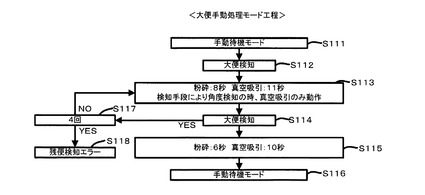
[大便手動処理工程]
大便手動処理工程について図20を用いて以下説明する。
ステップS111の手動待機モードでは、着用状態を検知したのち大便センサーGが作動開始し、大便センサーGが大便を検知するまで待機状態となる。そして、大便センサーGが大便を検知するとステップS112の大便検知に進む。
【0169】
ステップS112において、処理操作部Cは大便センサーGの検出値に基づいて、排出通路81に大便が検知するとステップS113に処理を移す。
【0170】
ステップS113において、処理操作部Cは、検知手段が検知した支持枠体31の揺動角度が一定角度未満の場合に、大便粉砕処理を実行し、大便の粉砕処理後に真空吸引を行う。例えば、粉砕を8秒行い、その後、真空吸引を11秒行う。
【0171】
また、検知手段が検知した支持枠体31の揺動角度が一定角度以上の場合には、例えば、大きく傾いた支持枠体31の揺動角度15°以上の場合は処理操作部Cによる上記洗浄動作を停止する制御に基づき、大便粉砕処理中の大便粉砕の洗浄動作を停止し、真空吸引の動作のみを実行する。すなわち、真空吸引は、吸気バルブ409を開き、吸入ポンプ400を始動し、ソレノイドバルブ91を開いた後、加圧ポンプ600を所定時間だけ稼動する。これにより、大便が貯留タンク300に吸引される。
【0172】
ステップS114において、処理操作部Cは、大便センサーGの検出値に基づいて、排出通路81に大便が検知されるとステップS117に処理を移す。一方、大便が検知されないとステップS115に処理を移す。
【0173】
ステップS115において、上記の大便粉砕処理を実行し、大便の粉砕処理後に真空吸引を行う。例えば、粉砕を6秒行い、その後、真空吸引を10秒行う。
【0174】
ステップS116において、手動待機モードとなる。
【0175】
S117において、4回目の大便検知であると便残留エラーを報知する(ステップS118)。一方、4回目未満の大便の検知である場合は、ステップS113に戻り処理を繰り返す。
【0176】
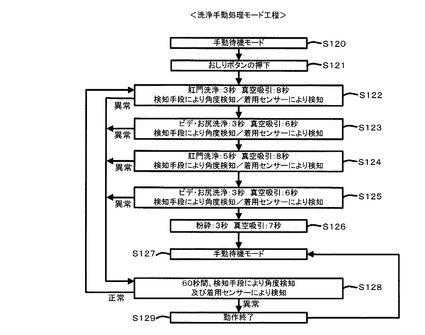
[洗浄手動処理工程]
洗浄手動処理工程について図21を用いて以下説明する。
【0177】
ステップS120の手動待機モードでは、おしりボタン(図示しない)が押下されるまで待機状態となる。
【0178】
ステップS121において、おしりボタンが押下されるとステップS122に処理を移す。
【0179】
ステップS122において、処理操作部Cは検知手段が検知した支持枠体31の揺動角度が一定角度未満の場合及び着用センサーIが検出信号を検知している場合に、上記の肛門の洗浄動作を実行し、真空吸引を行う。例えば、肛門洗浄を3秒行い、その後、真空吸引を8秒行う。
【0180】
一方、検知手段が検知した支持枠体31の揺動角度が一定角度以上となる異常の場合、及び着用センサーIが検出信号を検知できない異常の場合、例えば、大きく傾いた支持枠体31の揺動角度15°以上の場合は、処理操作部Cによる上記洗浄動作を停止する制御に基づき、肛門の洗浄動作を停止し、ステップS128に処理を移す。
【0181】
ステップS123において、処理操作部Cは検知手段が検知した支持枠体31の揺動角度が一定角度未満の場合及び着用センサーIが検出信号を検知している場合に、上記のビデ洗浄動作及び上記のお尻洗浄動作を実行し、真空吸引を行う。例えば、ビデ洗浄・お尻洗浄を3秒行い、その後、真空吸引を6秒行う。
【0182】
一方、検知手段が検知した支持枠体31の揺動角度が一定角度以上となる異常の場合、又は着用センサーIが検出信号を検知できない異常の場合、例えば、大きく傾いた支持枠体31の揺動角度15°以上の場合は、処理操作部Cによる上記洗浄動作を停止する制御に基づき、上記のビデ洗浄動作及び上記のお尻洗浄動作を停止し、ステップS128に処理を移す。
【0183】
ステップS124において、処理操作部Cは検知手段が検知した支持枠体31の揺動角度が一定角度未満の場合及び着用センサーIが検出信号を検知している場合に、上記の肛門の洗浄動作を実行し、真空吸引を行う。例えば、肛門洗浄を5秒行い、その後、真空吸引を8秒行う。
【0184】
一方、検知手段が検知した支持枠体31の揺動角度が一定角度以上となる異常の場合、及び着用センサーIが検出信号を検知できない異常の場合、例えば、大きく傾いた支持枠体31の揺動角度15°以上の場合は、処理操作部Cによる上記洗浄動作を停止する制御に基づき、肛門の洗浄動作を停止し、ステップS128に処理を移す。
【0185】
ステップS125において、処理操作部Cは検知手段が検知した支持枠体31の揺動角度が一定角度未満の場合及び着用センサーIが検出信号を検知している場合に、上記のビデ洗浄動作及び上記のお尻洗浄動作を実行し、真空吸引を行う。例えば、ビデ洗浄・お尻洗浄を3秒行い、その後、真空吸引を5秒行う。
【0186】
一方、検知手段が検知した支持枠体31の揺動角度が一定角度以上となる異常の場合、又は着用センサーIが検出信号を検知できない異常の場合、例えば、大きく傾いた支持枠体31の揺動角度15°以上の場合は、処理操作部Cによる上記洗浄動作を停止する制御に基づき、上記のビデ洗浄動作及び上記のお尻洗浄動作を停止し、ステップS128に処理を移す。
【0187】
ステップS126において、上記の大便粉砕処理を実行し、大便の粉砕処理後に真空吸引を行う。例えば、粉砕を3秒行い、その後、真空吸引を7秒行う。
【0188】
ステップS127において、手動待機モードとなる。
【0189】
ステップS128において、上記ステップS122、ステップS123、ステップS124及びステップS125における異常の場合の処理を行う。すなわち、例えば60秒間、支持枠体31の揺動角度を検知するように検知手段を作動して、一定の揺動角度以上の角度が検知されない場合、及び着用センサーIが検出信号を検出した場合は、ステップS122に戻り再度処理を行う。一方、検知手段が一定の揺動角度以上の角度を検知した場合、及び着用センサーIが検出信号を検出しない場合は、処理操作部Cは異常であると判断して動作終了(ステップS129)し、ステップS127に処理を移す。
【0190】
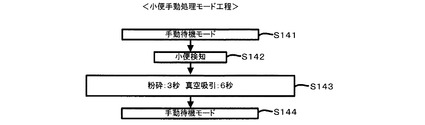
[小便手動処理工程]
小便手動処理工程について図22を用いて以下説明する。
【0191】
ステップS141の手動待機モードでは、着用状態を検知したのち小便センサーHが作動開始し、小便センサーHが小便を検知するまで待機状態となる。そして、小便センサーHが小便を検知するとステップS142の小便検知に進む。
【0192】
ステップS142において、小便センサーHの検出値に基づいて、排出通路81に小便が検知されるとステップS143に処理を移す。
【0193】
ステップS146において、上記の大便粉砕処理を実行し、大便の粉砕処理後に真空吸引を行う。例えば、粉砕を3秒、真空吸引を6秒行う。
【0194】
ステップS144において、手動待機モードとなる。
【0195】
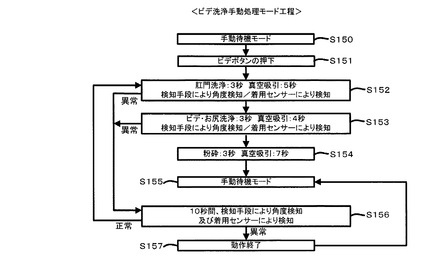
[ビデ洗浄手動処理工程]
ビデ洗浄手動処理工程について図23を用いて以下説明する。
【0196】
ステップS150の手動待機モードでは、ビデボタンが押下されるまで待機状態となる。
【0197】
ステップS151において、ビデボタンが押下されるとステップS152に処理を移す。
【0198】
ステップS152において、処理操作部Cは、検知手段が検知した支持枠体31の揺動角度が一定角度未満の場合及び着用センサーIが検出信号を検知している場合に上記の肛門洗浄動作を実行し、真空吸引を行う。例えば、肛門洗浄を3秒行い、その後、真空吸引を5秒行う。
【0199】
一方、検知手段が検知した支持枠体31の揺動角度が一定角度以上となる異常の場合、及び着用センサーIが検出信号を検知できない異常の場合、例えば、大きく傾いた支持枠体31の揺動角度15°以上の場合は、処理操作部Cにより上記の洗浄動作を停止する制御に基づき、上記の肛門洗浄動作を停止し、ステップS156に処理を移す。
【0200】
ステップS153において、処理操作部Cは、検知手段が検知した支持枠体31の揺動角度が一定角度未満の場合及び着用センサーIが検出信号を検知している場合に上記のビデ洗浄動作及び上記のお尻洗浄動作を実行し、真空吸引を行う。例えば、各ビデ洗浄及び上記のお尻洗浄を3秒行い、その後、真空吸引を4秒行う。
【0201】
一方、検知手段が検知した支持枠体31の揺動角度が一定角度以上となる異常の場合、及び着用センサーIが検出信号を検知できない異常の場合、例えば、大きく傾いた支持枠体31の揺動角度15°以上の場合は、処理操作部Cにより上記洗浄動作を停止する制御に基づき、上記のビデ洗浄動作及び上記のお尻洗浄動作を停止し、ステップS154に処理を移す。
【0202】
ステップS154において、上記の大便粉砕処理を実行し、大便の粉砕処理後に真空吸引を行う。例えば、粉砕を3秒、真空吸引を7秒行う。
【0203】
ステップS155において、手動待機モードとなる。
【0204】
ステップS156において、上記ステップS152、ステップS153における異常の場合の処理を行う。すなわち、例えば60秒間、支持枠体31の揺動角度を検知するように検知手段を作動して、一定の揺動角度以上の角度が検知されない場合、及び着用センサーIが検出信号を検出した場合は、ステップS152に戻り再度処理を行う。一方、検知手段が一定の揺動角度以上の角度を検知した場合、及び着用センサーIが検出信号を検出しない場合は、処理操作部Cは異常であると判断して、動作終了(ステップS157)し、ステップS155に戻る。
【0205】
[乾燥手動処理工程]
乾燥手動処理工程について図24を用いて以下説明する。
【0206】
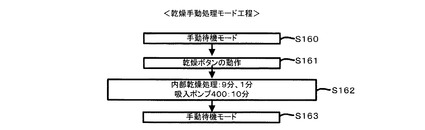
ステップS160の手動待機モードでは、乾燥ボタン(図示しない)が押下されるまで待機状態となる。
【0207】
ステップS161において、乾燥ボタンが押下されるとステップS162に処理を移す。
【0208】
ステップS162において、処理操作部Cは上記の内部乾燥処理を実行し、排尿便処理体51内における患者の局部の乾燥を行う。例えば、内部乾燥を9分行い、その後、さらに1分行う。そのとき吸入ポンプ400を10分稼働する。
【0209】
ステップS163において、手動待機モードとなる。
【図面の簡単な説明】
【0210】
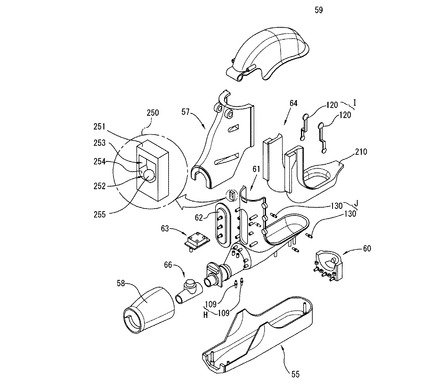
【図1】本実施形態の自動排尿便処理装置を示す分解斜視図である。
【図2】支持枠体を台座に載置した状態を示す斜視図である。
【図3】他の形態の台座に支持枠体を載置した状態を示す斜視図である。
【図4】他の形態の台座に支持枠体を載置した状態を示す正面図である。
【図5】本実施形態の自動排尿便処理装置を示す構成図である。
【図6】排尿便処理体を支持枠体に装着した状態を示す構成図である。
【図7】排尿便処理体の分解斜視図である。
【図8】排尿便処理体の断面図である。
【図9】処理部本体の斜視図である。
【図10】各種ノズルの正面図である。
【図11】(a)前端ノズルブラケットの斜視図である。(b)前端ノズルブラケットの正面図である。(c)前端ノズルブラケットの背面図である。
【図12】支持枠体の傾き状態を示す正面図である。
【図13】支持枠体の傾き状態を示す正面図である。
【図14】支持枠体の傾き状態を示す正面図である。
【図15】支持枠体の傾きを検知する検知手段の例1を示す分解斜視図である。
【図16】支持枠体の傾きを検知する検知手段の例2を示す分解斜視図である。
【図17】自動排尿便処理装置のメインフローを示す図である。
【図18】自動大便処理工程のフローを示す図である。
【図19】自動小便処理工程のフローを示す図である。
【図20】大便洗浄工程の手動処理手順を示すフローを示す図である。
【図21】洗浄工程の手動処理手順を示すフローを示す図である。
【図22】小便洗浄工程の手動処理手順を示すフローを示す図である。
【図23】ビデ洗浄工程の手動処理手順を示すフローを示す図である。
【図24】乾燥工程の手動処理手順を示すフローを示す図である。
【図25】従来の自動排尿便処理装置を示す分解斜視図である。
【符号の説明】
【0211】
C 処理操作部
D 排泄物収容部
E 洗浄水供給部
F ノズル操作部
G 大便センサー
H 小便センサー
I 着用センサー
J 水位センサー
K 自動排尿便処理装置
11 寝具ベッド
12 装着孔
21 おしめ
22 孔
31 支持枠体
32 底板
33 外周壁
34 ガイド通路
35 ガイド壁
41 尻載せパッド
42 U字状切欠空間
51 排尿便処理体
52 横部材
53 縦部材
55 支持ケース
57 縦ケース
58 カップリング
59 覆体
60 前端ノズルブラケット
64 縁部モール体
66 逆止弁ケース
74 三方弁
【技術分野】
【0001】
本発明は、寝たきりの患者や老人等が寝たままで他人の介助無しに排尿便を処理できる自動排尿便処理装置に関する。
【背景技術】
【0002】
従来、寝たきりの患者や老人等が寝たままで他人の介助無しに排尿便をしてその処理をも行えるようにするオムツや装置は種々考案されている。例えば、特許文献1には側面視略L字状の排尿便処理体に大便検知センサーと共に各種ノズルを備えた技術が開示されている。
【0003】
この技術は、排尿便する場合は、まず患者等が排尿便処理体の立ち上がり部を人体股間で挟圧しながら腰臀部を排尿便処理体上に載置するものであり、用便後は近接センサーから成る大便検知センサーで大便を感知して自動的に各種ノズルから洗浄水を噴出して局所を洗浄し、また排尿便処理体内も洗浄するものであり、大便は汚物吸入ホースから外部に排出し、このように自動的に寝たきりの患者の排便処理が行えるようにしたものである。
【0004】
その他に本願発明者により、寝たきりの患者に装着して排尿便処理が行える自動排便処理装置が開発されている。この発明技術は、図25に示すように、ベッド1011の中央の嵌着孔1012にU字状切欠孔1042を有する尻載せパッド1041を嵌着した支持枠体1031を嵌入し、尻載せパッド1041のU字状切欠孔1042中にL字形状の排尿便処理体1051を嵌着したものであり、患者は排尿便処理体1051を股間に装着して該排尿便処理体中に排尿便を行い、所定の手段で排尿便を排尿便処理体1051外に搬送する。しかも、ベッド1011と排尿便処理体1051との間にはおしめ1021を介在させて、患者の股間を覆い汚物の飛散や漏洩を防止し、かつ、臭気の発散を防止しながら外部から見えないようにして患者の羞恥心を生起しないようにしたものである。
【特許文献1】特開平8−322868号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、上記自動排便処理装置においても、患者が排尿便時に腰部を左右に動かすことは出来ないように股間と処理装置が固定的に一体とされており、患者の尻部が所定位置よりずれるような動きをすると処理装置に負荷がかかり股間との一体化が阻害され汚物が外部に漏洩したり、各種センサーの検知精度が低下し、機能障害を生起して洗浄機能が所定の成果を挙げることができないなどの不都合が生じていた。そこで、本願発明者は、患者の股間に排尿便処理体を装着したのち同排尿便処理体を嵌着した支持枠体を寝具用ベッドに装着した台座の上面で左右に揺動し得る構造を開発した。
【0006】
しかし、このような揺動可能な構造であるため、排尿便処理体を股間に装着した患者が、排尿便を行ったのちに局部の洗浄や各種洗浄を行うと、排尿便処理体内には排尿便及び洗浄水が貯留されることとなり、この状態で排尿便処理体を嵌着した支持枠体が大きく傾いてしまうと排尿便及び洗浄水が不用意に排尿便処理体外へ漏洩してしまう虞があった。
【0007】
本願発明は、股間に装着する排尿便処理体を嵌着した支持枠体を寝具用ベッドに装着した台座の上面で左右に揺動し得るように構成し、さらに、台座上で揺動可能な支持枠体の揺動角度を検知し得るようにすることにより、一定角度以上の揺動を検知した場合には尻部や局部の洗浄を停止して排尿便処理体内から洗浄水が漏洩することを可及的に防止することができる自動排尿便処理装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
請求項1に記載の発明は、寝具用ベッドの略中央に略矩形状に形成した装着孔と、上面を凹状半円弧に形成し装着孔に嵌着可能とした台座と、凹状半円弧の台座上に左右揺動自在に載置し得るべく外底面を凸状半円弧に形成し、かつ、上面に尻載せパッドを載置可能とした支持枠体と、中央にU字状切欠き空間を形成した尻載せパッドと、尻載せパッドのU字状切欠き空間位置に遊嵌され、尻部や局部の洗浄及び排尿便の外部排出を行うべく構成した排尿便処理体とより構成し、台座上で揺動可能な支持枠体に揺動角度を検知する検知手段を設け、一定角度以上の揺動を検知した場合には尻部や局部の洗浄を停止すべく構成したことを特徴とする。
【0009】
請求項2に記載の発明は、請求項1記載の自動排尿便処理装置において、検知手段は、台座に設けた磁石の磁場を感知して揺動角度を検知するマグネチックセンサーであることを特徴とする。
【0010】
請求項3に記載の発明は、請求項1に記載の自動排尿便処理装置において、検知手段は、台座に設けた色彩を感知して揺動角度を検知する赤外線センサーであることを特徴とする。
【0011】
請求項4に記載の発明は、請求項1に記載の自動排尿便処理装置において、検知手段は、ボールの転動状態により揺動角度を検知する勾配感知センサーであることを特徴とする。
【発明の効果】
【0012】
請求項1に記載の発明によれば、台座上で揺動可能な支持枠体に揺動角度を検知する検知手段を設けるので、一定角度以上の揺動を検知した場合には尻部や局部の洗浄を停止して排尿便処理体内から洗浄水が漏洩することがなくなる効果がある。また、検知手段が検知した揺動角度が一定角度未満の場合には通常通り尻部や局部の洗浄が行える効果がある。
【0013】
請求項2に記載の発明によれば、検知手段は、台座に設けた磁石の磁場を感知して揺動角度を検知するマグネチックセンサーであるので、支持枠体が大きく傾いた際に、マグチックセンサーが磁石の磁場を検知できなくなると、洗浄を停止する信号を処理操作部に送信し、処理操作部は尻部や局部の洗浄或は排尿便の洗浄を停止することができる。そして、不用意に支持枠体が傾いたとしても洗浄水或は排尿便が排尿便処理体外へ漏洩することを可及的に防止することが可能となる。
【0014】
請求項3に記載の発明によれば、検知手段は、台座に設けた色彩を感知して揺動角度を検知する赤外線センサーであるので、支持枠体が大きく傾いた際に、赤外線センサーは、台座に照射された赤外線が吸収されて反射赤外線を検知できなくなると、洗浄を停止する信号を処理操作部に送信し、処理操作部は尻部や局部の洗浄或は排尿便の洗浄を停止することができる。そして、不用意に支持枠体が傾いたとしても洗浄水或は排尿便が排尿便処理体外へ漏洩することを可及的に防止することが可能となる。
【0015】
請求項4に記載の発明によれば、検知手段は、ボールの転動状態により揺動角度を検知する勾配感知センサーであるので、支持枠体が大きく傾いた際に、勾配感知センサーは、内部空間に設けた傾き検知を行うボールが内部壁面に接触することで、洗浄を停止する信号を処理操作部に送信し、処理操作部は尻部や局部の洗浄或は排尿便の洗浄を停止することができる。そして、不用意に支持枠体が傾いたとしても洗浄水或は排尿便が排尿便処理体外へ漏洩することを可及的に防止することが可能となる。
【発明を実施するための最良の形態】
【0016】
この発明の実施例を図面に基づき説明する。
【0017】
図1に示すように、Kは、本発明の実施例である自動排尿便処理装置を示すものであり、この自動排尿便処理装置Kの概要は次のように構成されている。
【0018】
すなわち、先ず患者が仰臥できるだけの面積を有したウレタン製の寝具ベッド11を用い中央に装着孔12を形成し、装着孔12の一側は、寝具ベッド11に形成したパイプ通路13と連通させている。
【0019】
装着孔12は、略矩形状に形成し、この装着孔12の周辺には、中央に装着孔12に対応した孔22を有したおしめ21を敷く。その際に、その孔22と装着孔12とを対応させて、おしめ21の下手側に延設した股間覆い部23と上手側に延設した折り返し部24とが装着孔12の外周からはみ出した状態とする。
【0020】
装着孔12(図1参照)には、図2に示すように、矩形状の台座310を嵌着しており、台座310の上表面は凹状半円弧とした揺動受面311を形成しており、揺動受面311の先端縁部には後述する支持枠体31の揺動範囲を規制するための調整ストッパー手段312が設けられている。
【0021】
また、図2及び図3に示すように、台座310上には、以下に述べる略矩形状の支持枠体31を揺動自在に載置している。すなわち、支持枠体31の外底面38aは、凸状半円弧とした揺動底部38(図3参照)を形成し、支持枠体31には、ウレタン製の略U字型の尻載せパッド41(図1参照)を載置し、尻載せパッド41の中央のU字状切欠空間42には、略L字形状の排尿便処理体51の横部材52(図6参照)を遊嵌する。従って、支持枠体31上に尻載せパッド41及び略L字形状の排尿便処理体51を装着した状態では略L字形状の排尿便処理体51の縦部材53(図6参照)は尻載せパッド41上面より上方に突出した状態となる。さらに、後述するが支持枠体31には、揺動角度を検知する検知手段が設けられている。
【0022】
患者が本発明の自動排尿便処理装置Kを使用する際には、寝具ベッド11に仰臥し尻部を尻載せパッド41上に載置し、図8に示すように、排尿便処理体51の略L字状の縦部材53を股間に挟んで略L字状の横部材52の舟型内部に排尿、排便を行い、横部材52の頭部に設けた射水ノズル105からの排水により、尿便を排尿便処理体51外に排出し、排尿便処理体51の縦部材53に設けた洗浄ノズル203、ビデノズル202から洗浄水により尻部や局部を洗浄し、また、排尿便処理体51の横部材52に設けた尻ノズル104から洗浄水により尻部を洗浄し、その後、乾燥ノズル204、送気ノズル205からの送風により尻部や局部を乾燥するものである。
【0023】
次に、自動排尿便処理装置Kを構成する各構成部材について説明する。
【0024】
(i)装着孔12の周辺に敷設するおしめ21について説明する。
【0025】
図1に示すように、おしめ21は、中央部分に寝具ベッド11の装着孔12に対応した孔22を形成する。孔22の裏側には、方形状の箱型袋26が垂設されており、この箱型袋26は、寝具ベッド11周辺におしめ21を敷くときに中央の装着孔12中に嵌入されて、さらにその中には、後述する台座310が嵌入される。その孔22の下手側には、左右に露出した股間を覆うための股間覆い部23を延設し、同孔22の上手側には、左右に張出した折り返し部24を延設した形状としている。
【0026】
(ii)台座310について説明する。
【0027】
図2に示すように、台座310は、寝具ベッド11(図1参照)の装着孔12に嵌着しうる一定厚みの矩形状に形成されており、その上表面は凹状半円弧の揺動受面311を形成している。しかも、揺動受面311の先端縁部には揺動受面311上に揺動自在に載置する支持枠体31の揺動範囲を規制するための調整ストッパー手段312を設けている。
【0028】
すなわち、調整ストッパー手段312は、揺動受面311の先端縁部の半円弧面の左右に突起313,313を突設して、該突起313,313に後述する支持枠体31の構成部材が当接することにより、それ以上の左右揺動が行えないようにしている。
【0029】
あるいは調整ストッパー手段312は、一方の係合片320の突出作動により、この一方の係合片320と後述する支持枠体31の構成部材とが当接係合して、揺動範囲が規制されるものであり、この際には他方の係合片320は埋没作動するように構成されているため、他方の係合片320と支持枠体31の構成部材とは干渉することなく、支持枠体31の揺動の支障とならない。
【0030】
(iii)支持枠体31について説明する。
【0031】
図2から図4に示すように、台座310上に載置される支持枠体31は、外底面38a(図2参照)を凸状半円弧に形成した底板32を有する矩形ケース39よりなり、上方開口の箱型としている。
【0032】
すなわち、底板32の外周縁には外周壁33が少なくとも後述する尻載せパッド41(図1参照)の厚みより低い状態で立設されている。更に底板32の中央には、長手方向に沿って帯状のガイド通路34が設けられており、両側にはガイド壁35が設けられている。
【0033】
ガイド通路34は、下手側の枠体前壁33aを突き抜けて底板32の下手終端より突出し、突出部36の終端は開放状としており、従って、支持枠体31を寝具ベッド11(図1参照)の装着孔12に装着した台座310上に載置する場合は、ガイド通路34の突出部36を装着孔12と連通したパイプ通路13内に嵌め込んでおく。
【0034】
以上のように構成された支持枠体31は、外周壁33と帯状のガイド通路34との間に略U字状のU字空間37を形成しており、U字空間37の内底面は、凹状半円弧に形成している。このU字空間37に後述する略U字状の尻載せパッド41(図1参照)が嵌着される。
【0035】
このように外底面38a(図2参照)を凸状半円弧とした支持枠体31は、内底面が凹状半円弧の台座310上に左右揺動自在に載置されて、後述するように患者の尻部や腰部の動きに応じて左右に揺動して尻部のずれを吸収する。
【0036】
しかも、図3に示すように、支持枠体31は、台座310上で患者の尻部のずれや動きに応じて揺動するものの、その揺動範囲と一定の角度に規制するために台座310の調整ストッパー手段312と協働するための構造を設けている。
【0037】
すなわち、支持枠体31の中央には、帯状のガイド通路34が設けられ、このガイド通路34は前述の如く枠体前壁33aを突き抜けて支持枠体31の枠外に突出しており、当然にその両側のガイド壁35も枠体前壁33aより突出している。
【0038】
かかる構造の支持枠体31を台座310上に載置した場合、台座310の前壁315の左右に配設した突起313,313がガイド壁35の外側面と対向する状態となる。
【0039】
従って、支持枠体31を一方向に揺動させると台座310の突起313,313先端が当接して、それ以上は揺動できない。
【0040】
なお、かかる一定範囲内の揺動ができるためには、凸状半円弧に形成した底板32の前端部の一部のみ、すなわち、底板32より前方に突出したガイド壁35の横側方において凸状半円弧の底板32の前端部のみを切欠して平坦面32aを形成しておく必要がある。
【0041】
すなわち、図5に示すように、支持枠体31が揺動していない中立位置にある場合には、この平坦面32aにより形成された空間32bは、台座310の係合片320が位置して支持枠体31の底板32と干渉せずに支持枠体31の揺動を可能とする。
【0042】
このように揺動範囲は、突出状の突起313,313がガイド壁35に当接する範囲に限定される。
【0043】
(iv)尻載せパッド41について説明する。
【0044】
尻載せパッド41(図1参照)は、支持枠体31に形成された略U字状のU字空間37に嵌着できるように同じく略U字状に形成しており、中央のU字状切欠空間42に支持枠体31のガイド通路34のガイド壁35が嵌着できる構成としている。
【0045】
かかる尻載せパッド41を支持枠体31のU字空間37に嵌着した装着孔12に嵌入装着した場合に、尻載せパッド41の略U字状中央のU字状切欠空間42には、支持枠体31のガイド通路34のガイド壁35が嵌着されるため略U字状の尻載せパッド41はガイド通路34を囲繞する状態となる。
【0046】
また、尻載せパッド41の底面は、凸状半円弧の形状としており、従って、支持枠体31内のU字空間37中に尻載せパッド41を装着する場合に支持枠体31の凹状半円弧の内底面と一致して密着した装着が可能となる。
【0047】
また、支持枠体31のU字空間37は、排尿便処理体51内より漏洩した洗浄水が尻載せパッド41の周面より浸透しても漏水を貯留させ、寝具ベッド11裏面を濡らすことを防止する効果がある。
【0048】
(v)排尿便処理体51について説明する。
【0049】
図4に示すように、排尿便処理体51は、外底面を凸状半円弧に形成した支持枠体31(図2参照)のガイド通路34に嵌着する略長手楕円形状とした支持ケース55と、同支持ケース55中に嵌入して内蔵される略L字形状の処理部本体56とより構成される。
【0050】
図7及び図8に示すように、支持ケース55は、周辺に周壁を形成し、その内部に後述する処理部本体56の横部材52が収納されるように長方形に形成している。同支持ケース55の左右両側壁は、中央部分を山型に隆起させ、この隆起部55a及び支持ケース55の後半部開口縁には、更に縦ケース57を嵌着連設可能に構成しており、縦ケース57は、後述する略L字状の処理部本体56の縦部材後方と処理部本体56の上面の一部をケーシングすることができるように横断面半円弧状で側面視略L字状に形成している。
【0051】
更には、支持ケース55と縦ケース57との組付けで形成される下手側端部開口には、筒状のカップリング58が連結されており、該カップリング58内には、後述する処理部本体56の下手端部に設けられた尿便の排出通路81(図8参照)及びそれに連通した排出パイプ103(図1参照)が挿入される。
【0052】
なお、排尿便処理体51の支持ケース55は支持枠体31と共に台座310上で左右に揺動するため、排尿便処理体51の排出通路81と排出パイプ103の連結部分とは、カップリング58内で回転自在となるように構成されており、従って、台座310上で揺動する排尿便処理体51の回動中心線は、排出通路81と排出パイプ103との回転連結部分の回転中心線と一致させておく必要がある。
【0053】
また、図8に示すように、処理部本体56の縦部材80後方をケーシングする縦ケース57の上端縁には、患者の局部を上方から覆うための覆体59が開閉自在に枢着されている。
【0054】
かかる処理部本体56は、図7及び図8に示すように、内部を舟型に形成した排尿便受け部82と、その下手端部に立設した洗浄ノズル保持体61とにより略L字状に形成されている。
【0055】
図7及び図9に示すように、排尿便受け部82の前端には、前端ノズルブラケット60が設けられており、該前端ノズルブラケット60には、排尿便受け部82に貯留された尿便を下手側方向に押しやるべく射水するための射水ノズル105が設けられており、該射水ノズル105の近傍には隣接して患者尻部下面及び腰部を乾燥するための送気ノズル205が配設されている。
【0056】
図8に示すように、排尿便受け部82の下手側終端には、排出口102aが設けられており、同排尿便受け部82に貯留された汚物を外部の貯留タンク300に排出パイプ103を介して排出する。
【0057】
また、図8及び図10に示すように、洗浄ノズル保持体61には、洗浄ノズル203、ビデノズル202、乾燥ノズル204が設けられており、何れも患者の局部あるいは肛門に向って、水や空気を送ることができるように構成されている。
【0058】
これらの各ノズルに通じるパイプ基端は、図7から図9に示すように、洗浄ノズル保持体61の裏面に突出し、洗浄ノズル保持体61の裏面に装着した分配器62の分岐パイプ62aに連通されている。更に、分配器62の裏側においては、処理部本体56の洗浄ノズル保持体61上面にヒーター部63を装着しており、分配器62に通じるエアパイプをヒーター部63を介して加熱するように構成している。
【0059】
また、図8に示すように、支持ケース55の底面の略中央部には、断面山型の係合爪67を突設すると共に、支持ケース55を嵌着する支持枠体31のガイド通路34内の底面の下手部には多段の断面山型の係合溝68(図2参照)を形成している。71は排尿便処理体51の上手側の底面を押上げる略Z形状の板ばね(図7参照)、72は板ばね71の上面に載置した略半円状の押上受板である。
【0060】
(vi)排尿便処理体51の各種ノズル及び各種センサーについて説明する。
【0061】
図6及び図9に示すように、排尿便処理体51には、人体の各部位を洗浄するため洗浄水を噴射する尻ノズル104,射水ノズル105,ビデノズル202,洗浄ノズル203と、洗浄後に人体の局部及び外部尻部を乾燥するため空気を噴射する乾燥ノズル204、送気ノズル205、さらに、着用センサーI、大便センサーG、小便センサーH、水位センサーJが各所に配置されている。
【0062】
(vi−1)各種ノズルについて詳細に説明する。
【0063】
図8及び図10に示すように、排尿便処理体51は、前面凹部113の底面の下端部に配設された洗浄ノズル203と、前面凹部113の底面の、洗浄ノズル203より上方の位置に配設されたビデノズル202を有している。また、排尿便処理体51は、排出通路81の排出部102と反対側の端部に配設された射水ノズル105と、排出通路81の排出部102と反対側の端部における射水ノズル105より上方の位置に配設された尻ノズル104を有している。
【0064】
また、これら各種パイプは、束ねて外観ホース73内に挿入される。
【0065】
患者が排便、排尿すると、排尿便処理体51は、大便センサーG、小便センサーHにより大便、小便を検知し、その検出信号を処理操作部C(図5参照)へと送信する。かかる検出信号を受信した処理操作部Cは、ビデノズルパイプ602b、洗浄ノズルパイプ603、射水ノズルパイプ605、尻ノズルパイプ602cに洗浄水を供給し、ビデノズル202、洗浄ノズル203、射水ノズル105、尻ノズル104の各々から洗浄水が排尿便処理体51内へ噴射される。さらに、処理操作部Cは、後述する排尿便処理体51の支持枠体31に設けた揺動角度を検知する検知手段から送信された信号に基づき、揺動角度が所定角度より大きいか否かの判断の処理及び音声案内を行う処理を行うようにしている。処理操作部Cは、中央演算装置と、ROM及びRAMからなる記録部と、その他必要に応じて設定される回路などを備えた制御回路を構成している。
【0066】
(vi−2)各種センサーの構成について詳述する。
【0067】
図8に示すように、排尿便処理体51は、縁部モール体64の内側面に患者の大腿部に排尿便処理体51が一定圧で密着されたことを検知する着用センサーIが配設され、さらに、排尿便処理体51には、排出通路81の、排出部102と反対側の端部に赤外線センサーの発光部106が配設され、排出部102の下手側前縁部には赤外線センサーの受光部107が配設される。これら発光部106、受光部107は、排出通路81における大便を検知する大便センサーGとして機能する。排尿便処理体51には、他に排尿便受け部82下手側底面に小便を検知する小便センサーHが配設され、また、排尿便受け部82上手側の側縁部85に排尿便受け部82内の水位を検知する水位センサーJが配設されている。
【0068】
着用センサーIは、一対の導電性ゴムで形成した電極端子120を有しており、両電極端子120,120を患者の大腿部に一定圧で密着して、人体特有の静電容量の変化により患者の大腿部に排尿便処理体が装着されたことを検知するようにしている。両電極端子120,120は、縁部モール体64のL字状の縦部における内側面に対向するように配設していると共に処理操作部Cと図示しない導電線を介して接続されている。
【0069】
そして、患者の大腿部が縁部モール体64の縁部に一定圧で密着することで、同縁部が外方へ捲れるように湾曲することにより両電極端子120,120と大腿部とが当接し圧着状態となるため検知することが可能となる。
【0070】
図8に示すように、大便センサーGは、発光部106より発信された赤外線が対向する受光部107で受信されたか否かに基づき、発光部106と受光部107の間、すなわち排出通路81に大便が存在するか否かを検知する。発光部106は、前端ノズルブラケット60の上方の中央に突設しており、射水ノズル105の中央の大便粉砕用噴射孔105aより上方位置、かつ、尻ノズル104の洗浄水が直接当たらない位置に連設されている。受光部107は、赤外線以外の周囲の光によって誤作動を起こすことを防止するために、周囲の光が届きにくい排出部102の上部に設置されている。発光部106より発信された赤外線は、排出通路81の何れの場所に大便が存在していても大便により遮られるので、受光部107が受信する赤外線の量は減少する。よって、大便センサーGは、患者の個々の体型差、排尿便処理体51の着用状態及び大便の量に関わらず確実に大便を検知することができる。
【0071】
また、図8に示すように、小便センサーHは、前後に隣り合うように配設された一対の電極ピン109,109を備えている。また、電極ピン109、109は、処理操作部Cと図示しない導電線を介して接続されており、処理操作部Cからいずれか一方の電極ピン109に微弱な電流を流すように設定されている。そして、小便センサーHは、電極ピン109,109間がかかる微弱な電流によって洗浄水又は小便を導体として通電した際の電流値を検知する構成となっている。ここで、一般に、洗浄水と小便とでは塩度の差が存在するために、電気伝導率の差が生じる。すなわち、小便センサーHが検知する電流値は、洗浄水と小便とで異なる値となる。
【0072】
小便は、水と比較して塩度が高いため、この塩度の差に対応して両者の尿センサーアウトプット値に大きな差が生じることとなる。したがって、小便センサーHによって、電極ピン109,109間の電流値を検知し、尿センサーアウトプット値に対して所定のしきい値を用いることで洗浄水と小便とを確実に判別することが可能となる。
【0073】
このような構成により、患者が排便、排尿すると、排尿便処理体51は、大便センサーG、小便センサーHにより大便、小便を検知し、その検出信号を処理操作部C(図5参照)へと送信する。かかる検出信号を受信した処理操作部Cは、ビデノズルパイプ602b,洗浄ノズルパイプ603,射水ノズルパイプ605,尻ノズルパイプ602cに洗浄水を供給し、ビデノズル202、洗浄ノズル203、射水ノズル105、尻ノズル104の各々から洗浄水が排尿便処理体51内へ噴射される。これにより、患者の尻部、局部及び肛門が洗浄される一方で、排尿便が排出部102の方へ流される。このように患者の各部位と排尿便処理体51内を洗浄する洗浄工程を終えた後に、乾燥ノズルパイプ608,送気ノズルパイプ609に空気を供給し、乾燥ノズル204、送気ノズル205から温風及び送風の空気が排尿便処理体51内へ噴射される。このように患者の尻部、局部及び肛門の乾燥がなされる乾燥工程が実行される。
【0074】
水位センサーJは、図8に示すように、排尿便受け部82内の水位を検知するため、排尿便受け部82上手側の側縁部85,85に電極ピン130,130を備えている。電極ピン130,130は、処理操作部Cと図示しない導電線を介して接続されており、処理操作部C(図5参照)からいずれか一方の電極ピン130に微弱な電流を流すように設定されている。そして、水位センサーJは、電極ピン130,130間がかかる微弱な電流によって洗浄水又は小便を導体として通電した際の電流値を検知する構成となっている。
【0075】
(vii)外部処理構成としての処理操作部Cについて説明する。
【0076】
図5に示すように、処理操作部Cは、排尿便処理体51の汚物を収容する排泄物収容部Dと、排尿便処理体51から股間部と同排尿便処理体51との一定圧の密着状態を示す着用信号や排便及び/又は排尿の検出信号や排尿便受け部の水位上昇を示す水位信号を受信し、その後の洗浄動作などの各種動作を遂行するノズル操作部Fと、排尿便処理体51に洗浄水を供給する洗浄水供給部Eとよりなる。
【0077】
(vii−1)
排泄物収容部Dは、貯留タンク300を有しており、貯留タンク300は、排出パイプ103を介して、排尿便処理体51の排出口102aと接続されている。
【0078】
また、図5に示すように、ホース連結部303には、排出パイプ103と隣り合うように吸気パイプ401aが接続されている。
【0079】
(vii−2)
洗浄水供給部Eは、図5に示すように、洗浄水としての原水を供給する原水タンク500と、排尿便処理体51内に供給する洗浄水を所定温度に加熱するための温水タンク501と、原水タンク500から温水タンク501への給水を制御するソレノイドバルブ503を備えている。温水タンク501は、原水タンク500からソレノイドバルブ503を介して供給された原水を加熱する管ヒーター502と、水位を感知する水位センサー505と、水温を感知する温度センサー506とを備えている。
【0080】
洗浄水供給部Eは、温水タンク501内の原水の温度を温度センサー506で検知して、原水を管ヒーター502で加熱して温水とする。
【0081】
(vii−3)
ノズル操作部Fは、上述のように、排泄物収容部Dに吸気パイプ401aを介して接続されており、また、洗浄水供給部Eに送水パイプ504aを介して接続されている。図中の401aは吸気パイプ、409は弁としての吸気バルブ、408は減圧部としての真空タンク、401bは吸気パイプ、407aは悪臭除去フィルタ、413は圧力スイッチ、401cは吸気パイプ、401dは吸気パイプ、400は吸入ポンプ、402は吸気口、405は排気口、414はエア排出パイプ、407bは消音器である。
【0082】
一方、送水パイプ504aは、フィルタ507、送水パイプ504b、加圧ポンプ600、ノズルパイプ601a、各種ソレノイドバルブ91,92,93、三方弁74、各種ノズルパイプ602a,602b,602c,603,605を経て、排尿便処理体51内の尻ノズル104,射水ノズル105,ビデノズル202,洗浄ノズル203に接続されている。
【0083】
真空タンク408内に真空状態を形成することにより、より強い負圧を発生させて排尿便処理体51内の汚物を効率良く吸引することができる構成となっている。
【0084】
また、ソレノイドバルブ95,96、消音器404、2基の悪臭除去フィルタ407a,407a、消音器407bは1ユニット化されてフィルタアセンブリ607を構成している。
【0085】
次いで、自動排尿便処理装置Kにおける各種動作及び各種処理について説明する。
【0086】
[大便吸引動作]
大便吸引動作について説明する。先ず、吸気バルブ409を開き、吸入ポンプ400を始動し、ソレノイドバルブ91を開いた後、加圧ポンプ600を所定時間だけ稼動する。これにより、大便が貯留タンク300に吸引され、同時に、ビデの洗浄動作及びお尻の洗浄動作が開始実行される。
【0087】
すなわち、初期状態において、各種ソレノイドバルブ91,92,93とソレノイドバルブ95,96のNCポートと、吸気バルブ409と、逆止弁411とを閉じている。また、初期状態において、ソレノイドバルブ95,96のNOポートを開けている。図5に示すように、まず、吸気バルブ409を開け、吸入ポンプ400を始動する。これにより、排尿便処理体51内部の大便による臭い及び大便の一部が貯留タンク300に吸引される。同時に排尿便処理体51内の悪臭を含む空気は、逆止弁ケース66、排出パイプ103、貯留タンク300、吸入ポンプ400に向かって流れ、吸気口402前の悪臭除去フィルタ407a及び排気口405後の消音器407bを経て悪臭が除去されてから外部へ放出される。外部へ空気を排出する際に、消音器407bを備えることで、空気音を消音できると共に、2基の悪臭除去フィルタ407a,407aを並列に連通連結したので悪臭除去効果を長期に維持することができる。
【0088】
[ビデ洗浄動作、お尻洗浄動作及び肛門の洗浄動作]
ビデ洗浄動作、お尻洗浄動作及び肛門の洗浄動作について説明する。先ず、ソレノイドバルブ93を閉じ、ソレノイドバルブ91を開け、加圧ポンプ600を所定の時間だけ稼動する。これにより、温水タンク501から温水が、パイプ602aに送水され三方弁74によりビデノズルパイプ602bと尻ノズルパイプ602cに分けて送水される。一方、ビデノズルパイプ602bに送水された温水は、ビデノズル202から洗浄水として噴射され、患者の局部付近に付着した大便を洗浄する(以下、ビデ洗浄動作という)。他方、尻ノズルパイプ602cに送水された温水は、尻ノズル104から洗浄水として噴射され、患者の尻付近に付着した大便を洗浄する(以下、お尻洗浄動作という)。このとき、ビデ洗浄とお尻洗浄を同時に実行できることにより洗浄時間を短縮することが可能となる。
【0089】
次に、ソレノイドバルブ91を閉じ、ソレノイドバルブ92を開け、加圧ポンプ600を所定の時間だけ稼動する。これにより、温水タンク501から温水が、洗浄ノズルパイプ603に送水されて洗浄ノズル203から洗浄水として噴射され、患者の肛門付近に付着した大便を洗浄する(以下、肛門の洗浄動作という)。ソレノイドバルブ92を閉じ、さらに、お尻の洗浄動作及び肛門の洗浄動作を洗浄回数が2回に到達するまで繰り返す。これにより、患者のお尻及び肛門付近の洗浄を完璧に遂行することが可能となる。
【0090】
次に、洗浄回数が2回に到達すると、吸入ポンプ400を停止し、吸気バルブ409を閉じ、両洗浄動作を終了する。なお、洗浄動作において、各種ノズルから洗浄水が噴射されるとき、水位センサーJは、排尿便受け部82内における水位が一定水位以上か否かを常時検知しており、一定水位以上である場合、強制的に各種ノズルからの洗浄水の噴射を停止し、排尿便受け部82内の汚物を排出パイプ103を介して貯留タンク300内へ強制的に吸引、収容するように実行されるものである。ここでの処理は、後述する図18のステップS17〜S20において実行される。
【0091】
[大便粉砕処理]
大便粉砕処理について説明する。先ず、ソレノイドバルブ91を閉じ、ソレノイドバルブ93を開き、次いで、吸気バルブ409を閉じた後、吸入ポンプ400を稼動する。これにより、真空タンク408内の真空形成を開始する。
【0092】
そして、所定時間経過後に、加圧ポンプ600を稼動し、原水タンク500中の温水タンク501から送水された温水を、射水ノズルパイプ605を介して射水ノズル105から洗浄水として噴射し、大便粉砕処理を実行する。大便粉砕処理によって粉砕され、排出通路81方向に押しやられた大便は、汚物貯留空間Sで過流現象により洗浄水と十分に混合される(以下、過流現象による混合動作という)。そして、圧力スイッチ413に基づく内部圧力の検出値が最大真空圧(例えば、600mmHg)に到達するまで待った後、圧力スイッチ413からの検知信号に基づき図示しない制御回路を介して加圧ポンプ600を稼動し、吸気バルブ409を開く。この瞬間、真空タンク408に形成された最大真空圧により、排尿便受け部82において、大便を含む洗浄水の流れが滞り、大便を含む洗浄水が上下に旋回するような渦巻き状の流れを生じる過流現象となり、混合動作後の大便は、一層細かく粉砕されて洗浄水と十分に混合されると同時に、排尿便処理体51内で特に汚物が付着しやすい排出部102付近が十分に洗浄されて、排出部102から逆止弁ケース66、排出パイプ103を介して貯留タンク300に一気に吸入収容される(以下、真空吸入動作という)。なお、逆止弁ケース66は、大便の吸入時に逆流防止弁66aが自重に抗して開弁して大便や臭気等を吸入収容し、吸入終了後は、自重により閉弁して大便やその臭気を遮断することで常に排尿便処理体内の衛生状態が向上することとなる。
【0093】
その後、加圧ポンプ600を停止し、吸入ポンプ400を停止し、次いで、ソレノイドバルブ93を閉じた後、吸気バルブ409を閉じる。ここでの処理は、後述する図18のステップS13、S15、S21において実行される。
【0094】
[内部乾燥処理]
内部乾燥処理について説明する。先ず、吸気バルブ409を閉じ、ソレノイドバルブ97、ソレノイドバルブ95,96のNCポートを開いた後、吸入ポンプ400を所定時間稼動する。消音器404から取り込まれた空気を、一方、エア供給パイプ601b、ソレノイドバルブ97、乾燥ノズルパイプ608を経てヒーター部63で温め温風の乾燥空気として乾燥ノズル204から送り出して、乾燥空気で人体の局部、尻部及び排尿便処理体51内の乾燥を行うようにしている。吸入ポンプ400を所定時間だけ稼動すると、ソレノイドバルブ97、ソレノイドバルブ95,96のNCポートを閉じる。
【0095】
ソレノイドバルブ98、ソレノイドバルブ95,96のNCポートを開いた後、吸入ポンプ400を所定時間稼動する。消音器404から取り込まれた空気を、エア供給パイプ601b、ソレノイドバルブ98、送気ノズルパイプ609を経て、送風の乾燥空気として送気ノズル205から送り出して、乾燥空気で人体の尻部及び腰部の乾燥を行うようにしている。吸入ポンプ400を所定時間だけ稼動すると、ソレノイドバルブ98、ソレノイドバルブ95,96のNCポートを閉じ乾燥を終了する。ここでの処理は、後述する図18のステップS22及び図19のステップS47において実行される。
【0096】
[小便吸引動作]
小便吸引動作について説明する。先ず、吸気バルブ409を開き、吸入ポンプ400を始動し、ソレノイドバルブ91を開いた後、加圧ポンプ600を所定時間だけ稼動する。これにより、小便が貯留タンク300に吸引され、同時に、お尻の洗浄動作及びビデの洗浄動作が開始実行される。
【0097】
[小便洗浄処理]
小便洗浄処理について説明する。先ず、ソレノイドバルブ91を閉じ、ソレノイドバルブ93を開き、次いで、吸気バルブ409を閉じた後、吸入ポンプ400を稼動する。これにより、真空タンク408内の真空形成を開始する。
【0098】
そして、所定時間経過後に、加圧ポンプ600を稼動し、原水タンク500中の温水タンク501から送水された温水を、射水ノズルパイプ605を介して射水ノズル105から洗浄水として噴射し、小便を排出通路81方向に押しやる。そして、ほぼ同時に、吸気バルブ409を開く。この瞬間、真空タンク408に形成された最大真空圧により、小便は、排出口102aから逆止弁ケース66、排出パイプ103を介して貯留タンク300に一気に吸入収容される。
【0099】
その後、加圧ポンプ600を停止し、吸入ポンプ400を停止し、次いで、ソレノイドバルブ93を閉じた後、吸気バルブ409を閉じる。
【0100】
自動排尿便処理装置Kの構造及びその排尿便の処理工程は、以上説明したように行われるものであるが、本発明の特徴とするのは、かかる構造のうち台座310上の支持枠体31の過度な揺動があった場合に、処理工程中の洗浄動作を停止することにある。すなわち、台座310には、支持枠体31の揺動を規制する調整ストッパー手段312,312を設ける構成としたが、この調整ストッパー手段312の係合片320を台座310裏面に埋没させて揺動規制を解除した状態において、患者が腰部を大きくずらしたり捻ったりした場合に、支持枠体31を大きく揺動させて洗浄動作を行うと、洗浄水が排尿便処理体51外へ漏洩して、寝具ベッド11やおむつ21を汚損してしまう虞があり、そこで、かかる状態になっても患者が洗浄処理を快適に行うために次のような技術を開発するに至った。
【0101】
すなわち、本発明の特徴とするものは、かかる支持枠体31に揺動状態を検知する検知手段を設け、排尿便処理体51の支持枠体31が一定以上の範囲で揺動していることを検知したときに、後述する大便処理工程或は小便処理工程における各洗浄動作を停止する構成としたことにある。
【0102】
上記支持枠体31の揺動状態を検知する検知手段としては、後述するマグネチックセンサー230、赤外線センサー240、勾配感知センサー250を用いるようにした。その他に検知手段としては、揺動角度を直接算出する角度センサー等の電子デバイスを用いるようにしてもよい。
【0103】
先ず、上記大便処理工程或は小便処理工程における洗浄動作の停止制御について説明する。なお、小便処理工程における洗浄動作の停止制御については、上述した大便処理工程における洗浄動作の停止制御の説明と同様であり重複説明を省略する。
【0104】
大便処理工程或いは小便処理工程における上記ビデ洗浄動作中及び上記お尻洗浄動作中において、処理操作部Cによる上記洗浄動作を停止する制御に基づき、先ず、ソレノイドバルブ91を開いた状態から閉じて、加圧ポンプ600の稼動を停止する。これにより、温水タンク501からパイプ602a、三方弁74、ビデノズルパイプ602bと尻ノズルパイプ602cへの温水の送水が停止される。すなわち、ビデノズルパイプ602bを介してビデノズル202から患者の局部付近に噴射されていた洗浄水が停止される(ビデ洗浄動作の停止)。さらに、尻ノズルパイプ602cを介して尻ノズル104から患者の尻付近に噴射されていた洗浄水が止水される(お尻洗浄動作の停止)。
【0105】
一方、肛門の洗浄動作中においては、ソレノイドバルブ91を閉じて、ソレノイドバルブ92を開けることで洗浄ノズル203から洗浄水が噴射されている。そして、処理操作部Cによる上記洗浄動作を停止する制御に基づき、先ず、ソレノイドバルブ92を閉じ、加圧ポンプ600の稼動を停止する。これにより、温水タンク501から洗浄ノズルパイプ603への温水の送水が停止され、洗浄ノズル203から患者の肛門付近に噴射されていた洗浄水が止水される(肛門の洗浄動作の停止)。
【0106】
また、大便の粉砕処理中においては、加圧ポンプ600を稼動し、原水タンク500中の温水タンク501から送水された温水を、射水ノズルパイプ605を介して射水ノズル105から洗浄水として噴射している。そして、処理操作部Cによる上記洗浄動作を停止する制御に基づき、先ず、ソレノイドバルブ93を閉じ、加圧ポンプ600の稼動を停止する。これにより、温水タンク501から射水ノズルパイプ605への温水の送水が停止され、射水ノズル105から排出通路81に噴射されていた洗浄水が止水される(大便粉砕の洗浄動作の停止)。
【0107】
[実施例1]
上記検知手段としては、図12に示すように、台座310に設けた磁石231の磁場Mを感知して揺動角度を検知するマグネチックセンサー230を設ける。
【0108】
磁石231は、台座310の幅方向の中央位置に設けられており、上方の支持枠体31に向けて磁場Mを発生するようにしている。
【0109】
マグネチックセンサー230は、支持枠体31のガイド通路34の挿通孔34aに設けることとした。このマグネチックセンサー230は、支持枠体31の揺動角度に応じて磁石231から発生する磁場Mを感知し、揺動角度に応じた所定の信号を処理操作部Cに送信する。なお、マグネチックセンサー230は、処理操作部Cと配線(図示しない)で接続している。
【0110】
次に支持枠体31の各揺動角度におけるマグネチックセンサー230の作動状態について説明する。
【0111】
図12は、台座310に対する支持枠体31の基準点となる揺動角度0°の状態を示し、図13は、台座310に対する支持枠体31が小さく揺動して、支持枠体31の揺動角度5°の状態を示している。
【0112】
支持枠体31の揺動角度が0°〜14°において、マグネチックセンサー230は、磁石231の磁場Mを感知し、所定の信号を処理操作部Cに送信する。処理操作部Cは、後述するマグネチックセンサー230から送信された揺動角度が一定角度以上か否かの判断を行い、すなわち、揺動角度0°〜14°が一定角度より小さいために、後述する大便処理工程(図18参照)或は小便処理工程(図19参照)における各洗浄動作を開始する処理を行うこととなる。
【0113】
すなわち、大便処理工程或は小便処理工程において、処理操作部Cによる上記洗浄動作を開始する制御に基づき、先ず、ソレノイドバルブ93を閉じ、ソレノイドバルブ91を開け、加圧ポンプ600を所定の時間だけ稼動する。これにより、温水タンク501から温水が、パイプ602aに送水され三方弁74によりビデノズルパイプ602bと尻ノズルパイプ602cに分けて送水される。一方、ビデノズルパイプ602bに送水された温水は、ビデノズル202から洗浄水として噴射され、患者の局部付近に付着した大便を洗浄する(ビデ洗浄動作)。他方、尻ノズルパイプ602cに送水された温水は、尻ノズル104から洗浄水として噴射され、患者の尻付近に付着した大便を洗浄する(お尻洗浄動作)。
【0114】
次に、ソレノイドバルブ91を閉じ、ソレノイドバルブ92を開け、加圧ポンプ600を所定の時間だけ稼動する。これにより、温水タンク501から温水が、洗浄ノズルパイプ603に送水されて洗浄ノズル203から洗浄水として噴射され、患者の肛門付近に付着した大便を洗浄する(肛門の洗浄動作)。ソレノイドバルブ92を閉じ、さらに、お尻の洗浄動作及び肛門の洗浄動作を洗浄回数が2回に到達するまで繰り返し行われる。
【0115】
一方、患者が腰部を大きく捻った際、台座310に対する支持枠体31が大きく揺動してしまい、台座310に対する支持枠体31の揺動角度15°の場合(図14参照)において、マグネチックセンサー230は、磁石231の磁場Mを感知できず、このとき所定の信号を処理操作部Cに送信する。処理操作部Cは、後述するマグネチックセンサー230から送信された揺動角度15°が一定角度以上か否かの判断を行い、揺動角度15°が一定角度より大きいと判断すると、後述する大便処理工程(図18参照)或は小便処理工程(図19参照)における各洗浄動作を停止する制御を行う。
【0116】
すなわち、大便処理工程或は小便処理工程における上記ビデ洗浄動作中及び上記お尻洗浄動作中において、処理操作部Cによる上記洗浄動作を停止する制御に基づき、先ず、ソレノイドバルブ91を開いた状態から閉じて、加圧ポンプ600の稼動を停止する。これにより、温水タンク501からパイプ602a、三方弁74、ビデノズルパイプ602bと尻ノズルパイプ602cへの温水の送水が停止される。すなわち、ビデノズルパイプ602bを介してビデノズル202から患者の局部付近に噴射されていた洗浄水が停止される(ビデ洗浄動作の停止)。さらに、尻ノズルパイプ602cを介して尻ノズル104から患者の尻付近に噴射されていた洗浄水が止水される(お尻洗浄動作の停止)。
【0117】
一方、肛門の洗浄動作中においては、ソレノイドバルブ91を閉じて、ソレノイドバルブ92を開けることで洗浄ノズル203から洗浄水が噴射されている。そして、処理操作部Cによる上記洗浄動作を停止する制御に基づき、先ず、ソレノイドバルブ92を閉じ、加圧ポンプ600の稼動を停止する。これにより、温水タンク501から洗浄ノズルパイプ603への温水の送水が停止され、洗浄ノズル203から患者の肛門付近に噴射されていた洗浄水が止水される(肛門の洗浄動作の停止)。
【0118】
また、大便の粉砕処理中においては、加圧ポンプ600を稼動し、原水タンク500中の温水タンク501から送水された温水を、射水ノズルパイプ605を介して射水ノズル105から洗浄水として噴射している。そして、処理操作部Cによる上記洗浄動作を停止する制御に基づき、先ず、ソレノイドバルブ93を閉じ、加圧ポンプ600の稼動を停止する。これにより、温水タンク501から射水ノズルパイプ605への温水の送水が停止され、射水ノズル105から排出通路81に噴射されていた洗浄水が止水される(大便粉砕の洗浄動作の停止)。
【0119】
かかる構成によれば、患者が腰部や尻部を大きく捻った際に、その揺動を検知手段により検知し、検知した揺動角度が一定角度以上であるなら上記各洗浄動作を停止するため、排尿便処理体51内に貯留される洗浄水の水位が不用意に上昇するのを防止し、さらに、排尿便処理体51内から洗浄水が漏洩しておむつや寝具ベッド11を汚損することがなくなり、常に清潔に使用することが可能となる効果がある。
【0120】
[実施例2]
検知手段としては、図15に示すように、台座310に設けた色彩を感知して揺動角度を検知する赤外線センサー240とした。この赤外線センサー240は、支持枠体31のガイド通路34の挿通孔34aに設けており、赤外線を揺動受面311に照射する発光部(図示せず)と揺動受面311に反射された赤外線を受光する受光部(図示せず)とを備えている。さらに、台座310の上手側の揺動受面311には、赤外線を反射する反射領域311aと赤外線を吸収する吸収領域311bを設けており、この左右の吸収領域311bには、赤外線を吸収する特定の色彩が塗布されている。揺動受面311に設けた反射領域311aは、例えば、支持枠体31の揺動角度が0°から±14°の領域に設けられ、一方、吸収領域311bは、支持枠体31の揺動角度が±14°より大きい曲面領域に設けられる。なお、特定の色彩としては、赤外線を吸収する黒色とすることが好ましい。
【0121】
支持枠体31の揺動角度0°〜±14°の場合において、赤外線センサー240は、発光部から赤外線を揺動受面311に出射すると同揺動受面311の反射領域311aに反射された赤外線を受光部が受光すると、所定の信号を処理操作部Cに送信する。処理操作部Cは、後述する赤外線センサー240から送信された揺動角度が所定角度より大きいか否かの判断を行い、揺動角度が所定角度より小さいと判断すると、大便処理工程或は小便処理工程における各洗浄動作を開始する制御を行う。ここでの処理は、上記実施例1で説明した内容と同様なため重複説明を省略する。
【0122】
一方、支持枠体31の揺動角度±15°以上の場合において、赤外線センサー240は、発光部から赤外線を出射すると同揺動受面311の吸収領域311bに吸収されてしまい受光部が反射赤外線を受光できず、このとき所定の信号を処理操作部Cに送信する。処理操作部Cは、赤外線センサー240から送信された揺動角度が所定角度より大きいか否かの判断を行い、揺動角度が所定角度より大きいと判断すると、後述する大便処理工程(図18参照)或は小便処理工程(図19参照)における各洗浄動作を停止する制御を行う。ここでの処理は、上記実施例1で説明した内容と同様なため重複説明を省略する。
【0123】
[実施例3]
検知手段としては、図16に示すように、ボール255の転動状態により揺動角度を検知する勾配感知センサー250とした。勾配感知センサー250は、処理部本体56の洗浄ノズル保持体61の外側に設けており、内部空間253に凹部252を設けたケーシング251と、ケーシング251内に収容され、支持枠体31の揺動角度を感知するボール255とを備えている。
【0124】
支持枠体31の揺動角度0°〜±14°の場合において、ボール255は凹部252に収容された状態となり、勾配感知センサー250は、所定の信号を処理操作部Cに送信する。処理操作部Cは、勾配感知センサー250から送信された揺動角度が所定角度より大きいか否かの判断を行い、揺動角度が所定角度より小さいと判断すると、後述する大便処理工程或は小便処理工程における各洗浄動作を開始する制御を行う。ここでの処理は、上記実施例1で説明した内容と同様なため重複説明を省略する。
【0125】
一方、支持枠体31の揺動角度が±15°以上の場合において、ボール255が凹部252から脱して内部側壁254に接触した状態となり、勾配感知センサー250は、所定の信号を処理操作部Cに送信する。処理操作部Cは、勾配感知センサー250から送信された揺動角度が所定角度より大きいか否かの判断を行い、揺動角度が所定角度より大きいと判断すると、後述する大便処理工程(図18参照)或は小便処理工程(図19参照)における各洗浄動作を停止する制御を行う。ここでの処理は、上記実施例1で説明した内容と同様なため重複説明を省略する。
【0126】
[メイン処理工程]
自動排尿便処理装置Kのメイン処理工程について説明する。図17は、自動排便処理モード時の自動排尿便処理装置Kのメイン処理工程を示すフローチャートである。
【0127】
自動排尿便処理装置Kの電源スイッチ(図示しない)を操作すると、着用センサーIの検出信号に基いて、患者の股間部分が両電極端子120,120に一定圧で密着しているか否かを判断する(ステップS1)。電極端子120,120に一定圧で密着している場合は、次のステップS2の大便検知処理工程に進む。一方、電極端子120,120に一定圧で密着していない場合は、本メインフローを終了する。
【0128】
ステップS2において、後述するサブルーチンの大便処理工程が実行された後、ステップS3の小便処理工程に進む。
【0129】
ステップS3において、後述するサブルーチンの小便処理工程が実行された後、本メインフローを終了する。
【0130】
[大便処理工程]
以下、上記大便処理工程について詳細に説明する。図18は、大便洗浄工程の自動処理手順を示すフローチャートである。
【0131】
ステップS11の自動待機モードでは、着用状態を検知したのち大便センサーGが作動開始し、大便センサーGが大便を検知するまで待機状態となる。そして、大便センサーGが大便を検知するとステップS12の大便検知に進む。
【0132】
ステップS12において、処理操作部Cは、大便センサーGの検出値に基づいて、排出通路81に大便が検知するとステップS13に進む。
【0133】
ステップS13において、処理操作部Cは、検知手段が検知した支持枠体31の揺動角度が一定角度未満の場合に、大便粉砕処理を実行し、大便の粉砕処理後に真空吸引を行う。例えば、粉砕を8秒行い、その後、真空吸引を11秒行う。
【0134】
また、検知手段が検知した支持枠体31の揺動角度が一定角度以上の場合には、例えば、大きく傾いた支持枠体31の揺動角度15°以上の場合は処理操作部Cによる上記洗浄動作を停止する制御に基づき、大便粉砕処理中の大便粉砕の洗浄動作を停止し、真空吸引の動作のみを実行する。すなわち、真空吸引は、吸気バルブ409を開き、吸入ポンプ400を始動し、ソレノイドバルブ91を開いた後、加圧ポンプ600を所定時間だけ稼動する。これにより、大便が貯留タンク300に吸引される。
【0135】
ステップS14において、処理操作部Cは、大便センサーGの検出値に基づいて、排出通路81に大便が検知されるとステップS30に処理を移す。一方、大便が検知されてないとステップS15に処理を移す。
【0136】
ステップS15において、処理操作部Cは、検知手段が検知した支持枠体31の揺動角度が一定角度未満の場合に、上記の大便粉砕処理を実行し、大便の粉砕処理後に真空吸引を行う。例えば、粉砕を5秒行い、その後、真空吸引を10秒行う。
【0137】
一方、処理操作部Cは、検知手段が検知した支持枠体31の揺動角度が一定角度以上の場合に、例えば、大きく傾いた支持枠体31の揺動角度15°以上の場合は、処理操作部Cによる上記洗浄動作を停止する制御に基づき、大便粉砕処理中の大便粉砕の洗浄動作を停止し、真空吸引の動作のみを実行する。すなわち、真空吸引は、吸気バルブ409を開き、吸入ポンプ400を始動し、ソレノイドバルブ91を開いた後、加圧ポンプ600を所定時間だけ稼動する。これにより、大便が貯留タンク300に吸引される。
【0138】
ステップS16において、処理操作部Cは、所定時間待機し、大便センサーGの検出値に基づいて、排出通路81に大便が検知されない場合にステップS17に処理を移す。
【0139】
ステップS17において、処理操作部Cは、検知手段が検知した支持枠体31の揺動角度が一定角度未満の場合及び着用センサーIが検出信号を検知している場合に、上記の肛門の洗浄動作を実行し、真空吸引を行う。例えば、肛門洗浄を5秒行い、その後、真空吸引を8秒行う。
【0140】
一方、検知手段が検知した支持枠体31の揺動角度が一定角度以上となる異常の場合、及び着用センサーIが検出信号を検知できない異常の場合、例えば、大きく傾いた支持枠体31の揺動角度15°以上の場合は、処理操作部Cによる上記洗浄動作を停止する制御に基づき、肛門の洗浄動作を停止し、ステップS32に処理を移す。
【0141】
ステップS18において、処理操作部Cは、検知手段が検知した支持枠体31の揺動角度が一定角度未満の場合及び着用センサーIが検出信号を検知している場合に、上記のビデ洗浄動作及び上記のお尻洗浄動作を実行し、真空吸引を行う。例えば、ビデ洗浄・お尻洗浄を3秒行い、その後、真空吸引を6秒行う。
【0142】
一方、検知手段が検知した支持枠体31の揺動角度が一定角度以上となる異常の場合、又は着用センサーIが検出信号を検知できない異常の場合、例えば、大きく傾いた支持枠体31の揺動角度15°以上の場合は、処理操作部Cによる上記洗浄動作を停止する制御に基づき、上記のビデ洗浄動作及び上記のお尻洗浄動作を停止し、ステップS32に処理を移す。
【0143】
ステップS19において、処理操作部Cは、検知手段が検知した支持枠体31の揺動角度が一定角度未満の場合及び着用センサーIが検出信号を検知している場合に、上記の肛門の洗浄動作を実行し、真空吸引を行う。例えば、肛門洗浄を5秒行い、その後、真空吸引を8秒行う。
【0144】
一方、検知手段が検知した支持枠体31の揺動角度が一定角度以上となる異常の場合、及び着用センサーIが検出信号を検知できない異常の場合、例えば、大きく傾いた支持枠体31の揺動角度15°以上の場合は、処理操作部Cによる上記洗浄動作を停止する制御に基づき、肛門の洗浄動作を停止し、ステップS32に処理を移す。
【0145】
ステップS20において、処理操作部Cは検知手段が検知した支持枠体31の揺動角度が一定角度未満の場合及び着用センサーIが検出信号を検知している場合に、上記のビデ洗浄動作及び上記のお尻洗浄動作を実行し、真空吸引を行う。例えば、ビデ洗浄・お尻洗浄を3秒行い、その後、真空吸引を5秒行う。
【0146】
一方、検知手段が検知した支持枠体31の揺動角度が一定角度以上となる異常の場合、又は着用センサーIが検出信号を検知できない異常の場合、例えば、大きく傾いた支持枠体31の揺動角度15°以上の場合は、処理操作部Cによる上記洗浄動作を停止する制御に基づき、上記のビデ洗浄動作及び上記のお尻洗浄動作を停止し、ステップS32に処理を移す。
【0147】
ステップS21において、上記の大便粉砕処理を実行し、大便の粉砕処理後に真空吸引を行う。例えば、粉砕を8秒行い、その後、真空吸引を11秒行う。
【0148】
ステップS22において、上記の内部乾燥処理を実行し、排尿便処理体51内における患者の局部の乾燥を行う。例えば、内部乾燥を9分行い、その後、さらに1分行う。そのとき吸入ポンプ400を10分稼働する。なお、大便センサーGが大便を検知するとステップS13へ戻り処理を繰り返し行う。
【0149】
ステップS23において、自動待機モードとなる。その後、図17のメインフローに処理を戻す。
【0150】
ステップS32において、上記ステップS17、ステップS18、ステップS19及びステップS20における異常の場合の処理を行う。すなわち、例えば60秒間、支持枠体31の揺動角度を検知するように検知手段を作動して、一定の揺動角度以上の角度が検知されない場合、及び着用センサーIが検出信号を検出した場合は、ステップS17に戻り再度処理を行う。一方、検知手段が一定の揺動角度以上の角度を検知した場合、及び着用センサーIが検出信号を検出しない場合は、処理操作部Cは異常であると判断して、動作終了となる(ステップS33)。
【0151】
なお、ステップS30において、ステップS14における大便が検知され、4回目の大便検知であると便残留エラーを報知する(ステップS31)。一方、4回目未満の大便の検知である場合は、ステップS13に戻り処理を繰り返す。
【0152】
なお、排尿便処理体51が大きく傾き、検知手段の検知した揺動角度が一定角度以上である場合に、さらに処理操作部Cは、スピーカー(図示しない)を介して患者に排尿便処理体51を水平状態に戻す旨の音声案内を行うようにしてもよい。例えば、「排尿便処理体を水平状態に戻してください。」等の音声案内が行われる。
【0153】
[小便処理工程]
以下、上記小便処理工程について詳細に説明する。図19は、小便洗浄工程の自動処理手順を示すフローチャートである。
【0154】
ステップS41の自動待機モードでは、着用状態を検知したのち小便センサーHが作動開始し、小便センサーHが小便を検知するまで待機状態となる。そして、小便センサーHが小便を検知するとステップS42の小便検知に処理を移す。
【0155】
ステップS42において、処理操作部Cは、小便センサーHの検出値に基づいて、排出通路81に小便が検知されるとステップS43に処理を移す。
【0156】
ステップS43において、検知手段が検知した支持枠体31の揺動角度を所定の信号として処理操作部Cに送信するとステップS44に処理を移す。一方、検知手段が検知した支持枠体31の揺動角度が一定角度以上となる異常の場合、及び着用センサーIが検出信号を検知できない異常の場合、例えば、大きく傾いた支持枠体31の揺動角度15°以上の場合は、ステップS49に処理を移す。
【0157】
ステップS44において、処理操作部Cは、検知手段が検知した支持枠体31の揺動角度が一定角度未満の場合及び着用センサーIが検出信号を検知している場合に上記の肛門洗浄動作を実行し、真空吸引を行う。例えば、肛門洗浄を3秒行い、その後、真空吸引を5秒行う。
【0158】
一方、検知手段が検知した支持枠体31の揺動角度が一定角度以上となる異常の場合、及び着用センサーIが検出信号を検知できない異常の場合、例えば、大きく傾いた支持枠体31の揺動角度15°以上の場合は、処理操作部Cにより上記の洗浄動作を停止する制御に基づき、上記の肛門洗浄動作を停止し、ステップS49に処理を移す。
【0159】
ステップS45において、処理操作部Cは、検知手段が検知した支持枠体31の揺動角度が一定角度未満の場合及び着用センサーIが検出信号を検知している場合に上記のビデ洗浄動作及び上記のお尻洗浄動作を実行し、真空吸引を行う。例えば、各ビデ洗浄及び上記のお尻洗浄を3秒行い、その後、真空吸引を4秒行う。
【0160】
一方、検知手段が検知した支持枠体31の揺動角度が一定角度以上となる異常の場合、及び着用センサーIが検出信号を検知できない異常の場合、例えば、大きく傾いた支持枠体31の揺動角度15°以上の場合は、処理操作部Cにより上記洗浄動作を停止する制御に基づき、上記のビデ洗浄動作及び上記のお尻洗浄動作を停止し、ステップS49に処理を移す。
【0161】
ステップS46において、上記の大便粉砕処理を実行し、大便の粉砕処理後に真空吸引を行う。例えば、粉砕を3秒、真空吸引を7秒行う。
【0162】
ステップS47において、上記の内部乾燥処理を実行し、排尿便処理体51内における患者の局部の乾燥を行う。例えば、内部乾燥を9分行い、その後、さらに1分行う。そのとき吸入ポンプ400を10分稼働する。なお、小便センサーHが小便を検知するとステップS43へ戻り処理を繰り返し行う。
【0163】
ステップS48において、自動待機モードとなる。その後、図17のメインフローに処理を戻す。
【0164】
ステップS49において、上記ステップS43、ステップS44、ステップS45における異常の場合の処理を行う。すなわち、例えば60秒間、支持枠体31の揺動角度を検知するように検知手段を作動して、一定の揺動角度以上の角度が検知されない場合、及び着用センサーIが検出信号を検出した場合は、ステップS43に戻り再度処理を行う。一方、検知手段が一定の揺動角度以上の角度を検知した場合、及び着用センサーIが検出信号を検出しない場合は、処理操作部Cは異常であると判断して、動作終了となる(ステップS50)。
【0165】
なお、排尿便処理体51が大きく傾き、検知手段の検知した揺動角度が一定角度以上である場合に、さらに処理操作部Cは、患者に排尿便処理体51を水平状態に戻す旨の音声案内を行うようにしてもよい。例えば、「排尿便処理体を水平状態に戻してください。」等の音声案内が行われる。
【0166】
図17〜図19を用いて、自動排尿便処理装置Kの自動処理手順を説明したが、以下、手動処理の手順について図20〜図24に基いて説明する。
【0167】
図20は大便洗浄工程の手動処理手順を示すフローチャート、図21は洗浄工程の手動処理手順を示すフローチャート、図22は小便洗浄工程の手動処理手順を示すフローチャート、図23はビデ洗浄工程の手動処理手順を示すフローチャート、図24は乾燥工程の手動処理手順を示すフローチャートである。
【0168】
[大便手動処理工程]
大便手動処理工程について図20を用いて以下説明する。
ステップS111の手動待機モードでは、着用状態を検知したのち大便センサーGが作動開始し、大便センサーGが大便を検知するまで待機状態となる。そして、大便センサーGが大便を検知するとステップS112の大便検知に進む。
【0169】
ステップS112において、処理操作部Cは大便センサーGの検出値に基づいて、排出通路81に大便が検知するとステップS113に処理を移す。
【0170】
ステップS113において、処理操作部Cは、検知手段が検知した支持枠体31の揺動角度が一定角度未満の場合に、大便粉砕処理を実行し、大便の粉砕処理後に真空吸引を行う。例えば、粉砕を8秒行い、その後、真空吸引を11秒行う。
【0171】
また、検知手段が検知した支持枠体31の揺動角度が一定角度以上の場合には、例えば、大きく傾いた支持枠体31の揺動角度15°以上の場合は処理操作部Cによる上記洗浄動作を停止する制御に基づき、大便粉砕処理中の大便粉砕の洗浄動作を停止し、真空吸引の動作のみを実行する。すなわち、真空吸引は、吸気バルブ409を開き、吸入ポンプ400を始動し、ソレノイドバルブ91を開いた後、加圧ポンプ600を所定時間だけ稼動する。これにより、大便が貯留タンク300に吸引される。
【0172】
ステップS114において、処理操作部Cは、大便センサーGの検出値に基づいて、排出通路81に大便が検知されるとステップS117に処理を移す。一方、大便が検知されないとステップS115に処理を移す。
【0173】
ステップS115において、上記の大便粉砕処理を実行し、大便の粉砕処理後に真空吸引を行う。例えば、粉砕を6秒行い、その後、真空吸引を10秒行う。
【0174】
ステップS116において、手動待機モードとなる。
【0175】
S117において、4回目の大便検知であると便残留エラーを報知する(ステップS118)。一方、4回目未満の大便の検知である場合は、ステップS113に戻り処理を繰り返す。
【0176】
[洗浄手動処理工程]
洗浄手動処理工程について図21を用いて以下説明する。
【0177】
ステップS120の手動待機モードでは、おしりボタン(図示しない)が押下されるまで待機状態となる。
【0178】
ステップS121において、おしりボタンが押下されるとステップS122に処理を移す。
【0179】
ステップS122において、処理操作部Cは検知手段が検知した支持枠体31の揺動角度が一定角度未満の場合及び着用センサーIが検出信号を検知している場合に、上記の肛門の洗浄動作を実行し、真空吸引を行う。例えば、肛門洗浄を3秒行い、その後、真空吸引を8秒行う。
【0180】
一方、検知手段が検知した支持枠体31の揺動角度が一定角度以上となる異常の場合、及び着用センサーIが検出信号を検知できない異常の場合、例えば、大きく傾いた支持枠体31の揺動角度15°以上の場合は、処理操作部Cによる上記洗浄動作を停止する制御に基づき、肛門の洗浄動作を停止し、ステップS128に処理を移す。
【0181】
ステップS123において、処理操作部Cは検知手段が検知した支持枠体31の揺動角度が一定角度未満の場合及び着用センサーIが検出信号を検知している場合に、上記のビデ洗浄動作及び上記のお尻洗浄動作を実行し、真空吸引を行う。例えば、ビデ洗浄・お尻洗浄を3秒行い、その後、真空吸引を6秒行う。
【0182】
一方、検知手段が検知した支持枠体31の揺動角度が一定角度以上となる異常の場合、又は着用センサーIが検出信号を検知できない異常の場合、例えば、大きく傾いた支持枠体31の揺動角度15°以上の場合は、処理操作部Cによる上記洗浄動作を停止する制御に基づき、上記のビデ洗浄動作及び上記のお尻洗浄動作を停止し、ステップS128に処理を移す。
【0183】
ステップS124において、処理操作部Cは検知手段が検知した支持枠体31の揺動角度が一定角度未満の場合及び着用センサーIが検出信号を検知している場合に、上記の肛門の洗浄動作を実行し、真空吸引を行う。例えば、肛門洗浄を5秒行い、その後、真空吸引を8秒行う。
【0184】
一方、検知手段が検知した支持枠体31の揺動角度が一定角度以上となる異常の場合、及び着用センサーIが検出信号を検知できない異常の場合、例えば、大きく傾いた支持枠体31の揺動角度15°以上の場合は、処理操作部Cによる上記洗浄動作を停止する制御に基づき、肛門の洗浄動作を停止し、ステップS128に処理を移す。
【0185】
ステップS125において、処理操作部Cは検知手段が検知した支持枠体31の揺動角度が一定角度未満の場合及び着用センサーIが検出信号を検知している場合に、上記のビデ洗浄動作及び上記のお尻洗浄動作を実行し、真空吸引を行う。例えば、ビデ洗浄・お尻洗浄を3秒行い、その後、真空吸引を5秒行う。
【0186】
一方、検知手段が検知した支持枠体31の揺動角度が一定角度以上となる異常の場合、又は着用センサーIが検出信号を検知できない異常の場合、例えば、大きく傾いた支持枠体31の揺動角度15°以上の場合は、処理操作部Cによる上記洗浄動作を停止する制御に基づき、上記のビデ洗浄動作及び上記のお尻洗浄動作を停止し、ステップS128に処理を移す。
【0187】
ステップS126において、上記の大便粉砕処理を実行し、大便の粉砕処理後に真空吸引を行う。例えば、粉砕を3秒行い、その後、真空吸引を7秒行う。
【0188】
ステップS127において、手動待機モードとなる。
【0189】
ステップS128において、上記ステップS122、ステップS123、ステップS124及びステップS125における異常の場合の処理を行う。すなわち、例えば60秒間、支持枠体31の揺動角度を検知するように検知手段を作動して、一定の揺動角度以上の角度が検知されない場合、及び着用センサーIが検出信号を検出した場合は、ステップS122に戻り再度処理を行う。一方、検知手段が一定の揺動角度以上の角度を検知した場合、及び着用センサーIが検出信号を検出しない場合は、処理操作部Cは異常であると判断して動作終了(ステップS129)し、ステップS127に処理を移す。
【0190】
[小便手動処理工程]
小便手動処理工程について図22を用いて以下説明する。
【0191】
ステップS141の手動待機モードでは、着用状態を検知したのち小便センサーHが作動開始し、小便センサーHが小便を検知するまで待機状態となる。そして、小便センサーHが小便を検知するとステップS142の小便検知に進む。
【0192】
ステップS142において、小便センサーHの検出値に基づいて、排出通路81に小便が検知されるとステップS143に処理を移す。
【0193】
ステップS146において、上記の大便粉砕処理を実行し、大便の粉砕処理後に真空吸引を行う。例えば、粉砕を3秒、真空吸引を6秒行う。
【0194】
ステップS144において、手動待機モードとなる。
【0195】
[ビデ洗浄手動処理工程]
ビデ洗浄手動処理工程について図23を用いて以下説明する。
【0196】
ステップS150の手動待機モードでは、ビデボタンが押下されるまで待機状態となる。
【0197】
ステップS151において、ビデボタンが押下されるとステップS152に処理を移す。
【0198】
ステップS152において、処理操作部Cは、検知手段が検知した支持枠体31の揺動角度が一定角度未満の場合及び着用センサーIが検出信号を検知している場合に上記の肛門洗浄動作を実行し、真空吸引を行う。例えば、肛門洗浄を3秒行い、その後、真空吸引を5秒行う。
【0199】
一方、検知手段が検知した支持枠体31の揺動角度が一定角度以上となる異常の場合、及び着用センサーIが検出信号を検知できない異常の場合、例えば、大きく傾いた支持枠体31の揺動角度15°以上の場合は、処理操作部Cにより上記の洗浄動作を停止する制御に基づき、上記の肛門洗浄動作を停止し、ステップS156に処理を移す。
【0200】
ステップS153において、処理操作部Cは、検知手段が検知した支持枠体31の揺動角度が一定角度未満の場合及び着用センサーIが検出信号を検知している場合に上記のビデ洗浄動作及び上記のお尻洗浄動作を実行し、真空吸引を行う。例えば、各ビデ洗浄及び上記のお尻洗浄を3秒行い、その後、真空吸引を4秒行う。
【0201】
一方、検知手段が検知した支持枠体31の揺動角度が一定角度以上となる異常の場合、及び着用センサーIが検出信号を検知できない異常の場合、例えば、大きく傾いた支持枠体31の揺動角度15°以上の場合は、処理操作部Cにより上記洗浄動作を停止する制御に基づき、上記のビデ洗浄動作及び上記のお尻洗浄動作を停止し、ステップS154に処理を移す。
【0202】
ステップS154において、上記の大便粉砕処理を実行し、大便の粉砕処理後に真空吸引を行う。例えば、粉砕を3秒、真空吸引を7秒行う。
【0203】
ステップS155において、手動待機モードとなる。
【0204】
ステップS156において、上記ステップS152、ステップS153における異常の場合の処理を行う。すなわち、例えば60秒間、支持枠体31の揺動角度を検知するように検知手段を作動して、一定の揺動角度以上の角度が検知されない場合、及び着用センサーIが検出信号を検出した場合は、ステップS152に戻り再度処理を行う。一方、検知手段が一定の揺動角度以上の角度を検知した場合、及び着用センサーIが検出信号を検出しない場合は、処理操作部Cは異常であると判断して、動作終了(ステップS157)し、ステップS155に戻る。
【0205】
[乾燥手動処理工程]
乾燥手動処理工程について図24を用いて以下説明する。
【0206】
ステップS160の手動待機モードでは、乾燥ボタン(図示しない)が押下されるまで待機状態となる。
【0207】
ステップS161において、乾燥ボタンが押下されるとステップS162に処理を移す。
【0208】
ステップS162において、処理操作部Cは上記の内部乾燥処理を実行し、排尿便処理体51内における患者の局部の乾燥を行う。例えば、内部乾燥を9分行い、その後、さらに1分行う。そのとき吸入ポンプ400を10分稼働する。
【0209】
ステップS163において、手動待機モードとなる。
【図面の簡単な説明】
【0210】
【図1】本実施形態の自動排尿便処理装置を示す分解斜視図である。
【図2】支持枠体を台座に載置した状態を示す斜視図である。
【図3】他の形態の台座に支持枠体を載置した状態を示す斜視図である。
【図4】他の形態の台座に支持枠体を載置した状態を示す正面図である。
【図5】本実施形態の自動排尿便処理装置を示す構成図である。
【図6】排尿便処理体を支持枠体に装着した状態を示す構成図である。
【図7】排尿便処理体の分解斜視図である。
【図8】排尿便処理体の断面図である。
【図9】処理部本体の斜視図である。
【図10】各種ノズルの正面図である。
【図11】(a)前端ノズルブラケットの斜視図である。(b)前端ノズルブラケットの正面図である。(c)前端ノズルブラケットの背面図である。
【図12】支持枠体の傾き状態を示す正面図である。
【図13】支持枠体の傾き状態を示す正面図である。
【図14】支持枠体の傾き状態を示す正面図である。
【図15】支持枠体の傾きを検知する検知手段の例1を示す分解斜視図である。
【図16】支持枠体の傾きを検知する検知手段の例2を示す分解斜視図である。
【図17】自動排尿便処理装置のメインフローを示す図である。
【図18】自動大便処理工程のフローを示す図である。
【図19】自動小便処理工程のフローを示す図である。
【図20】大便洗浄工程の手動処理手順を示すフローを示す図である。
【図21】洗浄工程の手動処理手順を示すフローを示す図である。
【図22】小便洗浄工程の手動処理手順を示すフローを示す図である。
【図23】ビデ洗浄工程の手動処理手順を示すフローを示す図である。
【図24】乾燥工程の手動処理手順を示すフローを示す図である。
【図25】従来の自動排尿便処理装置を示す分解斜視図である。
【符号の説明】
【0211】
C 処理操作部
D 排泄物収容部
E 洗浄水供給部
F ノズル操作部
G 大便センサー
H 小便センサー
I 着用センサー
J 水位センサー
K 自動排尿便処理装置
11 寝具ベッド
12 装着孔
21 おしめ
22 孔
31 支持枠体
32 底板
33 外周壁
34 ガイド通路
35 ガイド壁
41 尻載せパッド
42 U字状切欠空間
51 排尿便処理体
52 横部材
53 縦部材
55 支持ケース
57 縦ケース
58 カップリング
59 覆体
60 前端ノズルブラケット
64 縁部モール体
66 逆止弁ケース
74 三方弁
【特許請求の範囲】
【請求項1】
寝具用ベッドの略中央に略矩形状に形成した装着孔と、上面を凹状半円弧に形成し装着孔に嵌着可能とした台座と、凹状半円弧の台座上に左右揺動自在に載置し得るべく外底面を凸状半円弧に形成し、かつ、上面に尻載せパッドを載置可能とした支持枠体と、中央にU字状切欠き空間を形成した尻載せパッドと、尻載せパッドのU字状切欠き空間位置に遊嵌され、尻部や局部の洗浄及び排尿便の外部排出を行うべく構成した排尿便処理体とより構成し、
台座上で揺動可能な支持枠体に揺動角度を検知する検知手段を設け、
一定角度以上の揺動を検知した場合には尻部や局部の洗浄を停止すべく構成した
ことを特徴とする自動排尿便処理装置。
【請求項2】
検知手段は、台座に設けた磁石の磁場を感知して揺動角度を検知するマグネチックセンサーである
ことを特徴とする請求項1に記載の自動排尿便処理装置。
【請求項3】
検知手段は、台座に設けた色彩を感知して揺動角度を検知する赤外線センサーである
ことを特徴とする請求項1に記載の自動排尿便処理装置。
【請求項4】
検知手段は、ボールの転動状態により揺動角度を検知する勾配感知センサーである
ことを特徴とする請求項1に記載の自動排尿便処理装置。
【請求項1】
寝具用ベッドの略中央に略矩形状に形成した装着孔と、上面を凹状半円弧に形成し装着孔に嵌着可能とした台座と、凹状半円弧の台座上に左右揺動自在に載置し得るべく外底面を凸状半円弧に形成し、かつ、上面に尻載せパッドを載置可能とした支持枠体と、中央にU字状切欠き空間を形成した尻載せパッドと、尻載せパッドのU字状切欠き空間位置に遊嵌され、尻部や局部の洗浄及び排尿便の外部排出を行うべく構成した排尿便処理体とより構成し、
台座上で揺動可能な支持枠体に揺動角度を検知する検知手段を設け、
一定角度以上の揺動を検知した場合には尻部や局部の洗浄を停止すべく構成した
ことを特徴とする自動排尿便処理装置。
【請求項2】
検知手段は、台座に設けた磁石の磁場を感知して揺動角度を検知するマグネチックセンサーである
ことを特徴とする請求項1に記載の自動排尿便処理装置。
【請求項3】
検知手段は、台座に設けた色彩を感知して揺動角度を検知する赤外線センサーである
ことを特徴とする請求項1に記載の自動排尿便処理装置。
【請求項4】
検知手段は、ボールの転動状態により揺動角度を検知する勾配感知センサーである
ことを特徴とする請求項1に記載の自動排尿便処理装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【公開番号】特開2010−148722(P2010−148722A)
【公開日】平成22年7月8日(2010.7.8)
【国際特許分類】
【出願番号】特願2008−331279(P2008−331279)
【出願日】平成20年12月25日(2008.12.25)
【出願人】(506230219)
【出願人】(506262380)株式会社サンヨーテック (15)
【Fターム(参考)】
【公開日】平成22年7月8日(2010.7.8)
【国際特許分類】
【出願日】平成20年12月25日(2008.12.25)
【出願人】(506230219)
【出願人】(506262380)株式会社サンヨーテック (15)
【Fターム(参考)】
[ Back to top ]