
自動搬送システム

【課題】コストを抑制しつつ、走行経路の変更要求に柔軟に対応できる自動搬送システムを提供すること。
【解決手段】操舵可能な駆動輪を含む駆動ユニット、及び駆動ユニットを制御する制御ユニットを備えた自動搬送車2と、自動搬送車2の位置を検知する位置検知手段と、を備え、予定された経路に沿って自動搬送車2を移動させる自動搬送システム1では、自動搬送車2が移動するエリアとして、位置検知手段による検知位置を利用して自動搬送車2が制御される誘導走行エリア1A、及び自動搬送車2の位置が検知されないエリアであって検知位置を利用することなく自動搬送車2が制御される自律走行エリア1Bが設定されている。
【解決手段】操舵可能な駆動輪を含む駆動ユニット、及び駆動ユニットを制御する制御ユニットを備えた自動搬送車2と、自動搬送車2の位置を検知する位置検知手段と、を備え、予定された経路に沿って自動搬送車2を移動させる自動搬送システム1では、自動搬送車2が移動するエリアとして、位置検知手段による検知位置を利用して自動搬送車2が制御される誘導走行エリア1A、及び自動搬送車2の位置が検知されないエリアであって検知位置を利用することなく自動搬送車2が制御される自律走行エリア1Bが設定されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自動搬送車により物品等を搬送する自動搬送システムに関する。
【背景技術】
【0002】
従来より、工場内の予め定められた経路に沿って走行する自動搬送車が知られている。自動搬送車は、駆動用のモータやバッテリ等を備えているほか、床面に敷設された磁気テープを検出するための検出センサを備えている。このような自動搬送車にワークを積載すれば、磁気テープが敷設された所定の経路に沿って無人でワークを搬送できる(例えば、特許文献1参照。)。
【0003】
さらに、例えば、工場の建屋の梁等に設置されたカメラにより自動搬送車を撮影してその位置を検知し、外部から自動搬送車を誘導する自動搬送システムも提案されている(例えば、特許文献2参照。)。このような自動搬送システムであれば、経路の変更等が比較的容易になり、機械設備等のレイアウト変更に迅速に対応可能である。
【0004】
しかしながら、前記従来の自動搬送システムでは、次のような問題がある。前者の磁気テープ等の導線を利用する自動搬送システムでは、経路の変更要求に迅速に対応できないおそれがある。後者の固定カメラを利用した自動搬送システムであれば比較的容易に経路を変更できる一方、カメラを設置できないエリアや、設置された機械等によって遮蔽されるエリアへの対応が難しく、全てのエリアを撮影できるようにカメラを設置しようとするとその設置台数が多くなりコスト的な不利が生じるおそれがある。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平4−177508号公報
【特許文献2】特開平9−230933号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は、前記従来の問題点に鑑みてなされたものであり、コストを抑制しつつ、走行経路の変更要求に柔軟に対応できる自動搬送システムを提供するための発明である。
【課題を解決するための手段】
【0007】
本発明は、操舵可能な駆動輪を含む駆動ユニット、及び駆動ユニットを制御する制御ユニットを備えた自動搬送車と、該自動搬送車の位置を検知する位置検知手段と、を備え、予定された経路に沿って前記自動搬送車を移動させる自動搬送システムであって、
前記自動搬送車が移動するエリアとして、前記位置検知手段による検知位置を利用して前記自動搬送車が制御される誘導走行エリア、及び前記自動搬送車の位置が検知されないエリアであって前記検知位置を利用することなく前記自動搬送車が制御される自律走行エリアが設定されている自動搬送システムにある(請求項1)。
【0008】
本発明の自動搬送システムでは、前記位置検知手段による前記自動搬送車の検知位置を利用して前記自動搬送車が制御される前記誘導走行エリアと、前記検知位置を利用することなく前記自動搬送車が移動する前記自律走行エリアと、が設けられている。例えば、移動経路の変更が有り得る領域を前記誘導走行エリアに設定し、変更の可能性が低い領域を前記自律走行エリアに設定することも良い。このように前記誘導走行エリアと前記自律走行エリアとを組み合わせれば、前記位置検知手段の設置コストを抑制しつつ、移動経路の変更要求に対して柔軟に対応できるようになる。
【0009】
本発明の好適な一態様の自動搬送システムにおける位置検知手段は、前記誘導走行エリアを撮影してエリア画像を取得する固定カメラを含み、該エリア画像の中から前記自動搬送車を検出してその位置を検知する手段である(請求項2)。
前記固定カメラは、前記誘導走行エリアを俯瞰するように取り付けられていることが良い。さらに、前記誘導走行エリアを1基の固定カメラによってカバーしても良いが、複数の固定カメラによって前記誘導走行エリアをカバーすることも良い。前記エリア画像中の前記自動搬送車を検出し易くするために、点灯ランプや特定形状のマーカー等を自動搬送車に取り付けることも良い。この場合には、前記自動搬送車を検出するための画像処理負担を抑制しながら、その検出精度を向上できる。
【0010】
なお、前記位置検知手段としては、前記固定カメラを利用して構成された手段のほか、グローバルポジショニングシステムを活用した手段や、前記自動搬送車が出力する音波等を複数箇所で受信し、箇所毎の位相差に応じて音源位置を検知する技術を利用して構成された手段等、さまざまな手段を採用できる。
【0011】
本発明の好適な一態様の自動搬送システムは、前記自動搬送車の移動速度及び移動方向を計測する移動計測手段と、
該移動計測手段による計測値を時間的に積分することで前記自動搬送車の変位を算出する変位算出手段と、
前記自動搬送車が前記誘導走行エリアを移動しているときに、前記位置検知手段による検知位置の時間的な差分である実変位と、対応する時間について前記変位算出手段が算出した計測変位と、を対比することで、前記計測値の精度を向上するための第1の補正係数を算出する第1の補正係数算出手段と、
前記移動計測手段による計測値を前記第1の補正係数により補正した補正計測値を時間的に積分することで前記自動搬送車の補正計測変位を算出する補正変位算出手段と、
前記自動搬送車が前記誘導走行エリアから前記自律走行エリアに進入した後、再度、前記誘導走行エリアへ進入するまでの自律走行経路について、前記自律走行エリアに進入したときの前記位置検知手段による検知位置と前記誘導走行エリアに復帰したときの前記位置検知手段による検知位置との差分を表す実変位と、前記自律走行経路の移動に費やされた時間について前記補正変位算出手段が算出した補正計測変位と、を対比することにより、前記補正計測値の精度を向上するための第2の補正係数を算出する第2の補正係数算出手段と、を備えている(請求項3)。
【0012】
この場合には、前記誘導走行エリアを走行中に前記第1の補正係数を算出でき、前記自律走行エリアを走行中に前記第2の補正係数を算出できる。この第2の補正係数は、前記第1の補正係数による補正計測値に基づく前記補正計測変位を利用して算出される補正係数である。この第2の補正係数は、前記自動搬送車側の走行特性等の影響が抑制されている一方、前記自律走行経路の路面状況等が反映された補正係数となっている。前記自動搬送車が再度、前記自律走行経路を走行する際に前記第2の補正係数を利用すれば、前記補正計測値の精度を向上でき、前記自律走行経路を移動中の変位を高精度に算出できるようになる。
【0013】
本発明の好適な一態様の自動搬送システムは、前記自動搬送車が前記誘導走行エリアを移動しているとき、前記実変位と前記計測変位との差分について閾値処理を施し、所定の閾値を超えたときに異常と判断して報知する異常報知手段を備えている(請求項4)。
前記差分が過大であるときには、前記自動搬送車自体あるいは走行路面に何らかの異常が生じている可能性が高い。そこで、前記差分に関する閾値処理を実行すれば、その処理結果に応じて異常を判断でき報知できる。
【図面の簡単な説明】
【0014】
【図1】実施例1における、自動搬送システムの概要を示す説明図。
【図2】実施例1における、自動搬送車を模式的に示す上面図。
【図3】実施例1における、自動搬送車のシステム構成を示すブロック図。
【図4】実施例1における、遠隔制御装置の電気的な構成を示すブロック図。
【図5】実施例1における、誘導走行エリアを対象とする自動搬送システムの動作の流れを示すフロー図。
【図6】実施例1における、自律走行エリアを対象とする自動搬送システムの動作の流れを示すフロー図。
【図7】実施例2における、自動搬送システムの第1の走行経路を示す説明図。
【図8】実施例2における、自動搬送システムの第2の走行経路を示す説明図。
【発明を実施するための形態】
【0015】
本発明の実施の形態につき、以下の実施例を用いて具体的に説明する。
(実施例1)
本例は、工場内で自動搬送車2を走行させる自動搬送システム1に関する。本例の内容について、図1〜図6を用いて説明する。
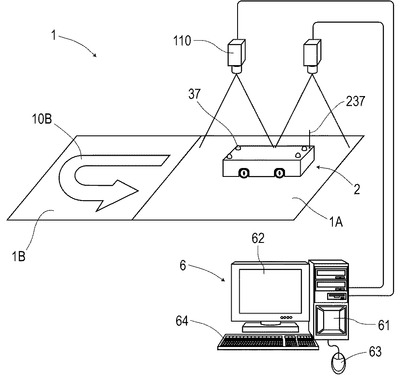
本例の自動搬送システム1は、図1のごとく、自律走行が可能な自動搬送車2と、自動搬送車2の位置を検知できるように外部に設けられた固定カメラ110(位置検知手段)と、自動搬送車2を制御する遠隔制御装置6と、を備えたシステムである。
【0016】
この自動搬送システム1では、固定カメラ110による検知位置に応じて自動搬送車2が誘導される誘導走行エリア1Aと、固定カメラ110の撮影エリア外であって、自動搬送車2が自律走行する自律走行エリア1Bと、が自動搬送車2の走行エリアとして設けられている。
以下、この内容について詳しく説明する。
【0017】
本例の自動搬送システム1は、例えば、自動車の組立て工場等に導入される無人の搬送システムである。自動車部品等のワークの積み込み、あるいは積み下ろしの拠点となるワークステーション間で自動搬送車2を自動走行させる自動搬送システム1を導入すれば、極めて高効率の搬送システムを実現できる。
【0018】
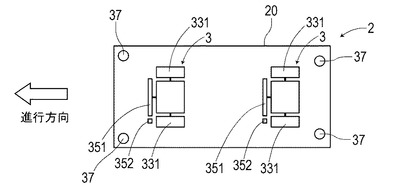
まず、本例の自動搬送システム1に適用される自動搬送車2について説明する。自動搬送車2は、図2のごとく、自動車部品等のワークを積載する荷台(図示略)を取り付け可能な前後方向に長い車体20を備えている。本例では、車体20の大きさが前後方向に約1.4mで、幅約0.5mとなっている。
【0019】
自動搬送車2の車体20には、前後方向の2箇所に駆動ユニット3が配置されているほか、制御ユニット50(図3)及び図示しないバッテリが搭載されている。車体20の前後方向の中間に当たる底面には、自在車輪よりなる補助輪(図示略)が左右両側に取り付けられている。車体20の上面4隅には、固定カメラ110(図1)が検知するLEDランプ37が配置されている。固定カメラ110による前後の区別が可能になるように、4隅のLEDランプ37のうち後ろ側の2個の設置幅が前側の2個よりも狭くなっている。
【0020】
駆動ユニット3は、図2及び図3のごとく、同軸上に並列配置された2本1組の駆動輪331と、これらの駆動輪331に個別に対応し、それぞれ独立に回転制御可能な2基の駆動モータ310と、を備えている。駆動ユニット3は、個別に駆動される両側の駆動輪331の回転差に応じて操舵される。本例の駆動ユニット3では、360度全周をカバーできるように操舵範囲が設定されている。
【0021】
駆動ユニット3の前面部分には、ラインセンサ351が中央に配設されていると共に、ラインセンサ351からオフセットする位置にマーカセンサ352が配設されている。これらのセンサは、常時、駆動ユニット3の前進側の正面に位置するよう、駆動ユニット3の操舵と共に回動するように取り付けられている。
【0022】
ラインセンサ351は、導線をなす磁気テープ(図示略)等の磁気を検出する検出センサである。本例のラインセンサ351は、図示しない磁気検出素子を横方向に複数配列したセンサであり、駆動ユニット3の進行方向に直交する方向に幅広の検出エリアを備えている。
マーカセンサ352は、床面に適宜、配置された番地マーカから番地情報等を読み取るセンサである。
なお、本例のシステムは、磁気テープ、番地マーカ等を含まず、ラインセンサ351、マーカセンサ352を必須としないシステムである。磁気テープ等を含む実施例2のシステムを考慮し、ここで、ラインセンサ351等の説明も記載した。
【0023】
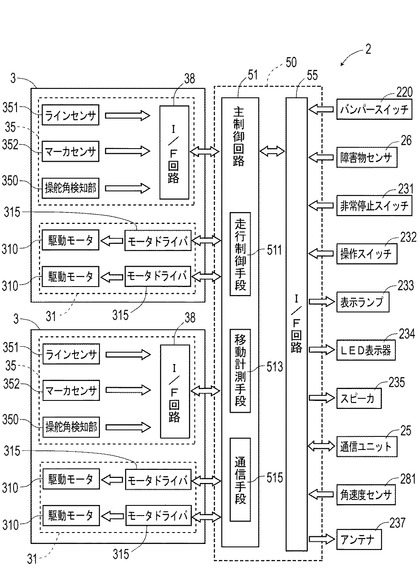
自動搬送車2の内部システムは、図3のごとく構成されている。自動搬送車2の制御ユニット50に対しては、2基の駆動ユニット3のほか、バンパースイッチ220、障害物センサ26、非常停止スイッチ231、操作スイッチ232、表示ランプ233、LED表示器234、スピーカ235、通信ユニット25、角速度センサ281、無線通信用のアンテナ237等が電気的に接続されている。
【0024】
駆動ユニット3の内部的な構成は、制御ユニット50から受信した制御信号に基づいて駆動輪331(図2)を駆動する駆動部31と、各種センサの検出信号を取り込んで制御ユニット50に送信する検出部35と、に区分される。
駆動部31は、駆動モータ310と、駆動モータ310を制御するモータドライバ315と、を含んで構成されている。モータドライバ315は、制御ユニット50から受信した制御信号に基づいて駆動モータ310の回転を制御する。このモータドライバ315は駆動モータ310の回転角度を把握しており、この回転角度に基づけば、対応する駆動輪331の転動距離を把握できる。
検出部35は、ラインセンサ351、マーカセンサ352、駆動ユニット3の操舵角を検出する操舵角検知部350等の検出手段のほか、制御ユニット50に対して検出信号等を送信する際のインターフェースとなるI/F回路38を備えている。
【0025】
制御ユニット50は、各種のスイッチ等と信号のやり取りをするためのインターフェースであるI/F回路55と、駆動ユニット3に向けて各種の制御信号を出力する主制御回路51と、を含むユニットである。主制御回路51は、以下の各手段としての機能を備えている。
【0026】
(1)走行制御手段511
自動搬送車2の移動を制御する手段。走行制御手段511は、遠隔制御装置6(図1)から受信する制御信号に従って自動搬送車2を移動できるよう、駆動モータ310等の制御値を算出し駆動部31を制御する。
(2)移動計測手段513
自動搬送車2の変位を計測する手段である。移動計測手段513は、各駆動輪331の回転角度、及び操舵角検知部350が検出する操舵角に応じて、自動搬送車2の移動速度及び移動方向を計測する。
(3)通信手段515
遠隔制御装置6との間で各種データあるいは信号を無線通信により送受信する手段である。遠隔制御装置6から受信するデータあるいは信号としては、自動搬送車2の制御信号等がある。遠隔制御装置6に向けて送信するデータとしては、移動計測手段513による計測値がある。計測値(移動速度及び移動方向)は、所定の時間毎に遠隔制御装置6に送信される。なお、本例では、1/30秒毎に計測値を送信している。計測値の送信間隔としては、本例の1/30秒に代えて、より短い時間を設定しても良く、より長い時間を設定しても良い。
【0027】
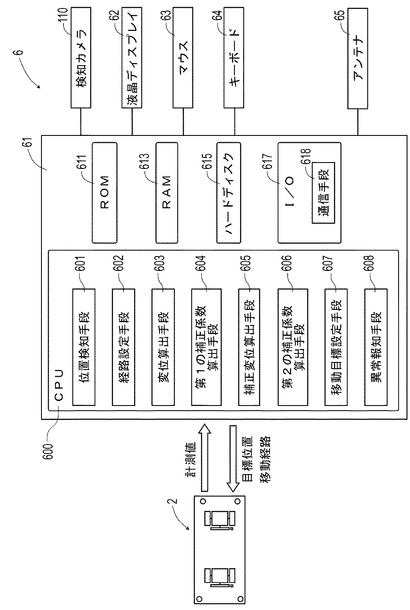
次に、遠隔制御装置6は、図1及び図4のごとく、各種の演算処理を実行可能な装置本体61と、表示手段である液晶ディスプレイ62と、キーボード64・マウス63等の入力手段と、を組み合わせたPC装置である。装置本体61は、演算処理を実行するCPU600のほか、ROM611、RAM613、ハードディスクドライブ615等の記憶手段、無線通信による通信手段618を含むI/O617を備えている。装置本体61は、システムを動作させるためのソフトウェアの実行により、以下の各手段としての機能を実現している。
【0028】
(1)位置検知手段601
固定カメラ110による誘導走行エリア1Aのエリア画像を利用して自動搬送車2の位置及び姿勢を検知する手段である。本例では、自動搬送車2の上面に取り付けられたLEDランプ37を検出してその位置を特定することで自動搬送車2の位置及び姿勢を検知している。なお、本例では、固定カメラ110が所定の設置仕様で取り付けられ、その撮影範囲が座標的に既知となっている。そのため、位置検知手段601によって絶対的な位置を検知可能である。
【0029】
(2)経路設定手段602
液晶ディスプレイ62による表示とマウス操作とを組み合わせたGUI(グラフィカルユーザーインターフェース)を利用して入力された移動経路を経路データとして設定する手段である。経路データは、誘導走行エリア1A及び自律走行エリア1Bにおいて座標的に表される経路マップのデータである。経路データは、RAM613の記憶エリアに格納される。
(3)変位算出手段603
自動搬送車2から受信する計測値(移動速度及び移動方向)に基づいて、自動搬送車2の変位(計測変位)を計算により求める手段である。変位算出手段603は、所定の時間に渡って自動搬送車2から随時受信する計測値を時間的に積分することで、その所定の時間内の自動搬送車2の移動に対応する計測変位を算出する。
【0030】
(4)第1の補正係数算出手段604
自動搬送車2による計測値の精度を向上するための第1の補正係数を計算により求める手段である。第1の補正係数算出手段604は、自動搬送車2が誘導走行エリア1Aを移動しているときに、位置検知手段601による検知位置の時間的な差分を表す実変位と、対応する時間について変位算出手段603が算出した計測変位と、を対比することで、第1の補正係数を算出する。なお、本例では、0.8秒間の実変位と計測変位とを対比して第1の補正係数を算出している。対比する対象の時間としては、本例の0.8秒間に代えて、これよりも長い時間や短い時間を設定できる。
【0031】
(5)補正変位算出手段605
自動搬送車2による計測値を第1の補正係数により補正した補正計測値を時間的に積分することで自動搬送車2の補正計測変位を算出する手段である。補正変位算出手段605は、所定の時間に渡って補正計測値を時間的に積分することで、その所定の時間内の移動に対応する補正計測変位を算出する。
【0032】
(6)第2の補正係数算出手段606
自律走行エリア1B内の自律走行経路10Bにおける補正計測値の算出精度をさらに向上するための第2の補正係数を計算により求める手段である。第2の補正係数算出手段606は、自律走行経路10B(図1)について補正変位算出手段605が算出した補正計測変位と、その自律走行経路10Bのスタート位置(自律走行エリア1Bへの進入時の位置検知手段601による検知位置)と終了位置(誘導走行エリア1Aに復帰したときの位置検知手段601による検知位置)との差分を表す実変位と、を対比することにより、第2の補正係数を算出する。なお、自律走行経路10Bにおける補正計測変位は、誘導走行エリア1Aを移動中に算出された第1の補正係数の平均値を利用して算出される。
【0033】
(7)移動目標設定手段607
自動搬送車2を移動させる目標位置、及び目標位置までの移動経路を自動搬送車2に設定する手段である。移動目標設定手段607は、自動搬送車2の現在位置及び前記経路データに基づいて、1.0秒後に自動搬送車2を移動させる先の目標位置及び移動経路を設定する。自動搬送車2が誘導走行エリア1Aに位置している場合には、位置検知手段601による検知位置が自動搬送車2の現在位置として利用される。一方、自律走行エリア1Bの場合には、自律走行エリア1Bに進入時の前記スタート位置に対して前記補正計測変位を足し合わせた位置が現在位置として利用される。なお、本例の移動経路は、目標位置に移動する際の経路をなす円弧の大きさ、及びその円弧の中心位置によって表される。なお、本例では、目標位置及び移動経路を設定するに当たって、1.0秒後という制御上の時間を設定している。この時間としては、本例の1.0秒よりも長い時間であっても良く、短い時間であっても良い。
【0034】
(8)異常報知手段608
自動搬送車2が誘導走行エリア1Aを移動しているときに、前記実変位と前記計測変位とを比較し、その差分が所定の閾値以上であったときに異常と判断して報知する手段である。本例の異常報知手段608は、異常と判断したとき、その旨を液晶ディスプレイ62の表示画面に表示することで異常を報知する。なお、誘導走行エリア1Aを移動中の異常の原因としては、自動搬送車2のトラブルのほか、走行路面に付着したオイル等のトラブルがある。
【0035】
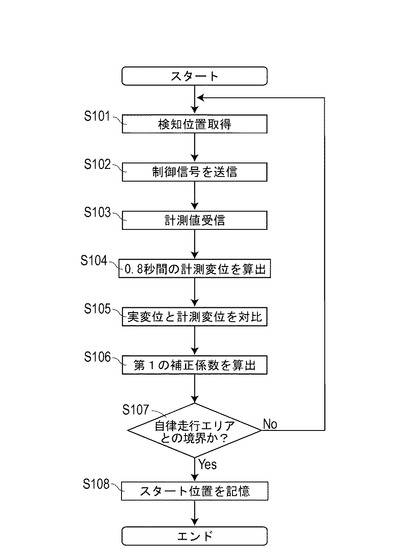
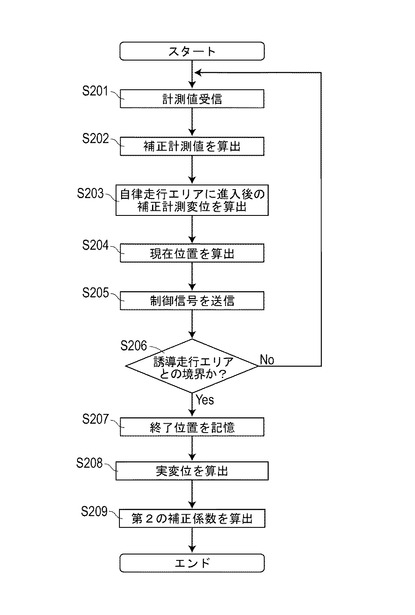
以上のような構成の本例の自動搬送システム1の動作について、図5及び図6のフロー図に沿って説明する。図5は、誘導走行エリア1Aに対応する遠隔制御装置6の制御フローである。図6は、自律走行エリア1Bに対応する遠隔制御装置6の制御フローである。
【0036】
自動搬送車2が誘導走行エリア1Aを移動しているとき、遠隔制御装置6は、図5のごとく随時、固定カメラ110によるエリア画像に基づいて検知位置を取得する(ステップS101)。さらに、この検知位置とRAM613に記憶された経路データとに基づいて1.0秒後の目標位置及び移動経路を算出し、制御信号として自動搬送車2に送信する(ステップS102)。
【0037】
自動搬送車2からは随時、計測値(移動速度及び移動方向)を受信する(ステップS103)。遠隔制御装置6は、計測値を受信する毎に直近の0.8秒間に渡る自動搬送車2の変位である計測変位を算出する(ステップS104)。そして、その0.8秒間の自動搬送車2の実変位と、算出した計測変位と、を対比して(ステップS105)、第1の補正係数を算出する(ステップS106)。なお、このとき、実変位と計測変位との差分が所定の閾値を超えたときには異常と判断され、その旨が報知される。
【0038】
遠隔制御装置6は、自動搬送車2が自律走行エリア1Bとの境界に到達するまで、以上の処理ステップを繰り返し実行する(ステップS107:NO)。その後、自動搬送車2が自律走行エリア1Bとの境界に到達した場合には(ステップS107:YES)、遠隔制御装置6は、その境界位置に当たる検知位置を自律走行経路10Bのスタート位置として記憶すると共に(ステップS108)、誘導走行エリア1Aを移動中に算出した第1の補正係数の平均値を記憶する。
【0039】
自動搬送車2が自律走行エリア1Bを移動しているとき、遠隔制御装置6は、図6のごとく随時、自動搬送車2から移動速度及び移動方向の計測値を受信する(ステップS201)。計測値を受信する毎に、記憶する第1の補正係数により補正して補正計測値を算出し(ステップS202)、さらに、自律走行エリア1Bに進入してからの補正計測値を時間的に積分して補正計測変位を算出する(ステップS203)。RAM613に格納したスタート位置にその補正計測変位を足し合わせれば、自動搬送車2の現在位置を算出できる(ステップS204)。遠隔制御装置6は、上記のように算出した現在位置、及びRAM613に格納された経路データに基づいて、1.0秒後の移動目標及び移動経路を算出し、制御信号として自動搬送車2に向けて送信する(ステップS205)。
【0040】
遠隔制御装置6は、自動搬送車2が誘導走行エリア1Aとの境界に到達するまで、以上の処理ステップを繰り返し実行する(ステップS206:NO)。その後、自動搬送車2が誘導走行エリア1Aとの境界に到達した場合には(ステップS206:YES)、遠隔制御装置6は、その境界位置に当たる検知位置を自律走行経路10Bの終了位置として記憶すると共に(ステップS207)、自律走行経路10Bのスタート位置と終了位置との差分を表す実変位を算出する(ステップS208)。そして、この実変位と、自律走行経路10Bにおける補正計測変位と、を対比して、第2の補正係数を算出する(ステップS209)。
【0041】
遠隔制御装置6が算出する第2の補正係数は、自律走行経路10Bの路面状況が反映された補正係数である。そのため、この第2の補正係数は、自動搬送車2が、再度、自律走行経路10Bを移動する際に有用となる。第1の補正係数に加えて、第2の補正係数により計測値を補正すれば、自律走行経路10Bの路面状況を反映して計測値の精度を向上でき、現在位置を一層高精度に算出できる。自律走行経路10Bを移動中に算出される現在位置の精度が向上すれば、自動搬送車2の自律走行を一層精度高く制御できるようになる。
【0042】
以上の通り本例の自動搬送システム1は、誘導走行エリア1Aと自律走行エリア1Bとを組み合わせることにより、固定カメラ110の設置コストを抑制しつつ、走行経路の変更要求に柔軟に対応できる優れたシステムになっている。
【0043】
なお、自律航法手段を自動搬送車2に具備させることも良い。自律航法手段を備えていれば、自動搬送車2に作用する外乱、例えば、車体の向きを変動させるような外力、床面のスベリや起伏等をある程度、吸収できるようになる。自律航法手段としては、例えば、角速度センサ、加速度センサ、速度センサ等を利用した手段が考えられる。
【0044】
本例の遠隔制御装置6が備える各手段の機能は、経路設定手段602が備えるGUI機能を除いて、自動搬送車2側で実現することも可能である。例えば、固定カメラ110の画像データを取り込めば、自動搬送車2側で自分の位置を計算することも可能である。遠隔制御装置6が算出した現在位置を取り込めば、予め記憶した経路データと対比して目標位置や移動経路を自動搬送車2側で算出することも可能である。ただし、自動搬送車2側で補正係数を算出する場合には、他の車体でも利用可能なようにその補正係数を遠隔制御装置6に送信しておくことが良い。
【0045】
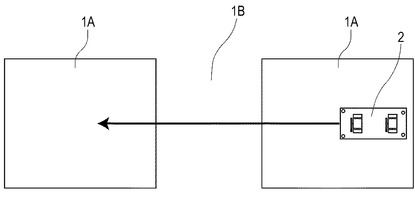
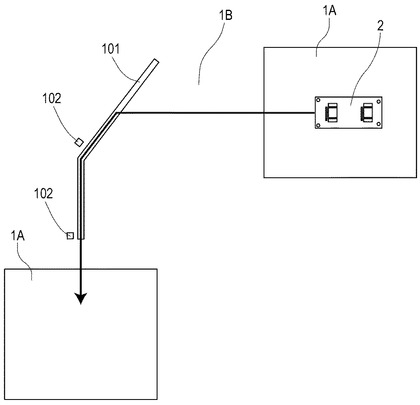
(実施例2)
本例は、実施例1の自動搬送システムを基にして、走行エリアの構成を変更した例である。この内容について、図7及び図8を参照して説明する。
図7は、誘導走行エリア1Aから自律走行エリア1Bを経由して別の誘導走行エリア1Aに進入する移動経路の例である。
図8は、自律走行エリア1Bに磁気テープ(導線)101、番地マーカ102が敷設された移動経路の例である。番地マーカ102に位置情報を関係付けしておくことも良い。自動搬送車2が番地マーカ102を読み取りできたときに、実施例1と同様のスタート位置と、番地マーカ102が表すマーカ位置と、の差分を実変位として取り扱いでき、第2の補正係数を算出できるようになる。
なお、その他の構成及び作用効果は実施例1と同様である。
【0046】
以上、実施例のごとく本発明の具体例を詳細に説明したが、これらの具体例は、特許請求の範囲に包含される技術の一例を開示しているにすぎない。言うまでもなく、具体例の構成や数値等によって、特許請求の範囲が限定的に解釈されるべきではない。特許請求の範囲は、公知技術や当業者の知識等を利用して前記具体例を多様に変形あるいは変更した技術を包含している。
【符号の説明】
【0047】
1 自動搬送システム
1A 誘導走行エリア
1B 自律走行エリア
10B 自律走行経路
110 固定カメラ
2 自動搬送車
281 角速度センサ
20 車体
3 駆動ユニット
331 駆動輪
50 制御ユニット
511 走行制御手段
513 移動計測手段
515 通信手段
6 遠隔制御装置
601 位置検知手段
602 経路設定手段
603 変位算出手段
604 第1の補正係数算出手段
605 補正変位算出手段
606 第2の補正係数算出手段
607 移動目標設定手段
608 異常報知手段
618 通信手段
【技術分野】
【0001】
本発明は、自動搬送車により物品等を搬送する自動搬送システムに関する。
【背景技術】
【0002】
従来より、工場内の予め定められた経路に沿って走行する自動搬送車が知られている。自動搬送車は、駆動用のモータやバッテリ等を備えているほか、床面に敷設された磁気テープを検出するための検出センサを備えている。このような自動搬送車にワークを積載すれば、磁気テープが敷設された所定の経路に沿って無人でワークを搬送できる(例えば、特許文献1参照。)。
【0003】
さらに、例えば、工場の建屋の梁等に設置されたカメラにより自動搬送車を撮影してその位置を検知し、外部から自動搬送車を誘導する自動搬送システムも提案されている(例えば、特許文献2参照。)。このような自動搬送システムであれば、経路の変更等が比較的容易になり、機械設備等のレイアウト変更に迅速に対応可能である。
【0004】
しかしながら、前記従来の自動搬送システムでは、次のような問題がある。前者の磁気テープ等の導線を利用する自動搬送システムでは、経路の変更要求に迅速に対応できないおそれがある。後者の固定カメラを利用した自動搬送システムであれば比較的容易に経路を変更できる一方、カメラを設置できないエリアや、設置された機械等によって遮蔽されるエリアへの対応が難しく、全てのエリアを撮影できるようにカメラを設置しようとするとその設置台数が多くなりコスト的な不利が生じるおそれがある。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平4−177508号公報
【特許文献2】特開平9−230933号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は、前記従来の問題点に鑑みてなされたものであり、コストを抑制しつつ、走行経路の変更要求に柔軟に対応できる自動搬送システムを提供するための発明である。
【課題を解決するための手段】
【0007】
本発明は、操舵可能な駆動輪を含む駆動ユニット、及び駆動ユニットを制御する制御ユニットを備えた自動搬送車と、該自動搬送車の位置を検知する位置検知手段と、を備え、予定された経路に沿って前記自動搬送車を移動させる自動搬送システムであって、
前記自動搬送車が移動するエリアとして、前記位置検知手段による検知位置を利用して前記自動搬送車が制御される誘導走行エリア、及び前記自動搬送車の位置が検知されないエリアであって前記検知位置を利用することなく前記自動搬送車が制御される自律走行エリアが設定されている自動搬送システムにある(請求項1)。
【0008】
本発明の自動搬送システムでは、前記位置検知手段による前記自動搬送車の検知位置を利用して前記自動搬送車が制御される前記誘導走行エリアと、前記検知位置を利用することなく前記自動搬送車が移動する前記自律走行エリアと、が設けられている。例えば、移動経路の変更が有り得る領域を前記誘導走行エリアに設定し、変更の可能性が低い領域を前記自律走行エリアに設定することも良い。このように前記誘導走行エリアと前記自律走行エリアとを組み合わせれば、前記位置検知手段の設置コストを抑制しつつ、移動経路の変更要求に対して柔軟に対応できるようになる。
【0009】
本発明の好適な一態様の自動搬送システムにおける位置検知手段は、前記誘導走行エリアを撮影してエリア画像を取得する固定カメラを含み、該エリア画像の中から前記自動搬送車を検出してその位置を検知する手段である(請求項2)。
前記固定カメラは、前記誘導走行エリアを俯瞰するように取り付けられていることが良い。さらに、前記誘導走行エリアを1基の固定カメラによってカバーしても良いが、複数の固定カメラによって前記誘導走行エリアをカバーすることも良い。前記エリア画像中の前記自動搬送車を検出し易くするために、点灯ランプや特定形状のマーカー等を自動搬送車に取り付けることも良い。この場合には、前記自動搬送車を検出するための画像処理負担を抑制しながら、その検出精度を向上できる。
【0010】
なお、前記位置検知手段としては、前記固定カメラを利用して構成された手段のほか、グローバルポジショニングシステムを活用した手段や、前記自動搬送車が出力する音波等を複数箇所で受信し、箇所毎の位相差に応じて音源位置を検知する技術を利用して構成された手段等、さまざまな手段を採用できる。
【0011】
本発明の好適な一態様の自動搬送システムは、前記自動搬送車の移動速度及び移動方向を計測する移動計測手段と、
該移動計測手段による計測値を時間的に積分することで前記自動搬送車の変位を算出する変位算出手段と、
前記自動搬送車が前記誘導走行エリアを移動しているときに、前記位置検知手段による検知位置の時間的な差分である実変位と、対応する時間について前記変位算出手段が算出した計測変位と、を対比することで、前記計測値の精度を向上するための第1の補正係数を算出する第1の補正係数算出手段と、
前記移動計測手段による計測値を前記第1の補正係数により補正した補正計測値を時間的に積分することで前記自動搬送車の補正計測変位を算出する補正変位算出手段と、
前記自動搬送車が前記誘導走行エリアから前記自律走行エリアに進入した後、再度、前記誘導走行エリアへ進入するまでの自律走行経路について、前記自律走行エリアに進入したときの前記位置検知手段による検知位置と前記誘導走行エリアに復帰したときの前記位置検知手段による検知位置との差分を表す実変位と、前記自律走行経路の移動に費やされた時間について前記補正変位算出手段が算出した補正計測変位と、を対比することにより、前記補正計測値の精度を向上するための第2の補正係数を算出する第2の補正係数算出手段と、を備えている(請求項3)。
【0012】
この場合には、前記誘導走行エリアを走行中に前記第1の補正係数を算出でき、前記自律走行エリアを走行中に前記第2の補正係数を算出できる。この第2の補正係数は、前記第1の補正係数による補正計測値に基づく前記補正計測変位を利用して算出される補正係数である。この第2の補正係数は、前記自動搬送車側の走行特性等の影響が抑制されている一方、前記自律走行経路の路面状況等が反映された補正係数となっている。前記自動搬送車が再度、前記自律走行経路を走行する際に前記第2の補正係数を利用すれば、前記補正計測値の精度を向上でき、前記自律走行経路を移動中の変位を高精度に算出できるようになる。
【0013】
本発明の好適な一態様の自動搬送システムは、前記自動搬送車が前記誘導走行エリアを移動しているとき、前記実変位と前記計測変位との差分について閾値処理を施し、所定の閾値を超えたときに異常と判断して報知する異常報知手段を備えている(請求項4)。
前記差分が過大であるときには、前記自動搬送車自体あるいは走行路面に何らかの異常が生じている可能性が高い。そこで、前記差分に関する閾値処理を実行すれば、その処理結果に応じて異常を判断でき報知できる。
【図面の簡単な説明】
【0014】
【図1】実施例1における、自動搬送システムの概要を示す説明図。
【図2】実施例1における、自動搬送車を模式的に示す上面図。
【図3】実施例1における、自動搬送車のシステム構成を示すブロック図。
【図4】実施例1における、遠隔制御装置の電気的な構成を示すブロック図。
【図5】実施例1における、誘導走行エリアを対象とする自動搬送システムの動作の流れを示すフロー図。
【図6】実施例1における、自律走行エリアを対象とする自動搬送システムの動作の流れを示すフロー図。
【図7】実施例2における、自動搬送システムの第1の走行経路を示す説明図。
【図8】実施例2における、自動搬送システムの第2の走行経路を示す説明図。
【発明を実施するための形態】
【0015】
本発明の実施の形態につき、以下の実施例を用いて具体的に説明する。
(実施例1)
本例は、工場内で自動搬送車2を走行させる自動搬送システム1に関する。本例の内容について、図1〜図6を用いて説明する。
本例の自動搬送システム1は、図1のごとく、自律走行が可能な自動搬送車2と、自動搬送車2の位置を検知できるように外部に設けられた固定カメラ110(位置検知手段)と、自動搬送車2を制御する遠隔制御装置6と、を備えたシステムである。
【0016】
この自動搬送システム1では、固定カメラ110による検知位置に応じて自動搬送車2が誘導される誘導走行エリア1Aと、固定カメラ110の撮影エリア外であって、自動搬送車2が自律走行する自律走行エリア1Bと、が自動搬送車2の走行エリアとして設けられている。
以下、この内容について詳しく説明する。
【0017】
本例の自動搬送システム1は、例えば、自動車の組立て工場等に導入される無人の搬送システムである。自動車部品等のワークの積み込み、あるいは積み下ろしの拠点となるワークステーション間で自動搬送車2を自動走行させる自動搬送システム1を導入すれば、極めて高効率の搬送システムを実現できる。
【0018】
まず、本例の自動搬送システム1に適用される自動搬送車2について説明する。自動搬送車2は、図2のごとく、自動車部品等のワークを積載する荷台(図示略)を取り付け可能な前後方向に長い車体20を備えている。本例では、車体20の大きさが前後方向に約1.4mで、幅約0.5mとなっている。
【0019】
自動搬送車2の車体20には、前後方向の2箇所に駆動ユニット3が配置されているほか、制御ユニット50(図3)及び図示しないバッテリが搭載されている。車体20の前後方向の中間に当たる底面には、自在車輪よりなる補助輪(図示略)が左右両側に取り付けられている。車体20の上面4隅には、固定カメラ110(図1)が検知するLEDランプ37が配置されている。固定カメラ110による前後の区別が可能になるように、4隅のLEDランプ37のうち後ろ側の2個の設置幅が前側の2個よりも狭くなっている。
【0020】
駆動ユニット3は、図2及び図3のごとく、同軸上に並列配置された2本1組の駆動輪331と、これらの駆動輪331に個別に対応し、それぞれ独立に回転制御可能な2基の駆動モータ310と、を備えている。駆動ユニット3は、個別に駆動される両側の駆動輪331の回転差に応じて操舵される。本例の駆動ユニット3では、360度全周をカバーできるように操舵範囲が設定されている。
【0021】
駆動ユニット3の前面部分には、ラインセンサ351が中央に配設されていると共に、ラインセンサ351からオフセットする位置にマーカセンサ352が配設されている。これらのセンサは、常時、駆動ユニット3の前進側の正面に位置するよう、駆動ユニット3の操舵と共に回動するように取り付けられている。
【0022】
ラインセンサ351は、導線をなす磁気テープ(図示略)等の磁気を検出する検出センサである。本例のラインセンサ351は、図示しない磁気検出素子を横方向に複数配列したセンサであり、駆動ユニット3の進行方向に直交する方向に幅広の検出エリアを備えている。
マーカセンサ352は、床面に適宜、配置された番地マーカから番地情報等を読み取るセンサである。
なお、本例のシステムは、磁気テープ、番地マーカ等を含まず、ラインセンサ351、マーカセンサ352を必須としないシステムである。磁気テープ等を含む実施例2のシステムを考慮し、ここで、ラインセンサ351等の説明も記載した。
【0023】
自動搬送車2の内部システムは、図3のごとく構成されている。自動搬送車2の制御ユニット50に対しては、2基の駆動ユニット3のほか、バンパースイッチ220、障害物センサ26、非常停止スイッチ231、操作スイッチ232、表示ランプ233、LED表示器234、スピーカ235、通信ユニット25、角速度センサ281、無線通信用のアンテナ237等が電気的に接続されている。
【0024】
駆動ユニット3の内部的な構成は、制御ユニット50から受信した制御信号に基づいて駆動輪331(図2)を駆動する駆動部31と、各種センサの検出信号を取り込んで制御ユニット50に送信する検出部35と、に区分される。
駆動部31は、駆動モータ310と、駆動モータ310を制御するモータドライバ315と、を含んで構成されている。モータドライバ315は、制御ユニット50から受信した制御信号に基づいて駆動モータ310の回転を制御する。このモータドライバ315は駆動モータ310の回転角度を把握しており、この回転角度に基づけば、対応する駆動輪331の転動距離を把握できる。
検出部35は、ラインセンサ351、マーカセンサ352、駆動ユニット3の操舵角を検出する操舵角検知部350等の検出手段のほか、制御ユニット50に対して検出信号等を送信する際のインターフェースとなるI/F回路38を備えている。
【0025】
制御ユニット50は、各種のスイッチ等と信号のやり取りをするためのインターフェースであるI/F回路55と、駆動ユニット3に向けて各種の制御信号を出力する主制御回路51と、を含むユニットである。主制御回路51は、以下の各手段としての機能を備えている。
【0026】
(1)走行制御手段511
自動搬送車2の移動を制御する手段。走行制御手段511は、遠隔制御装置6(図1)から受信する制御信号に従って自動搬送車2を移動できるよう、駆動モータ310等の制御値を算出し駆動部31を制御する。
(2)移動計測手段513
自動搬送車2の変位を計測する手段である。移動計測手段513は、各駆動輪331の回転角度、及び操舵角検知部350が検出する操舵角に応じて、自動搬送車2の移動速度及び移動方向を計測する。
(3)通信手段515
遠隔制御装置6との間で各種データあるいは信号を無線通信により送受信する手段である。遠隔制御装置6から受信するデータあるいは信号としては、自動搬送車2の制御信号等がある。遠隔制御装置6に向けて送信するデータとしては、移動計測手段513による計測値がある。計測値(移動速度及び移動方向)は、所定の時間毎に遠隔制御装置6に送信される。なお、本例では、1/30秒毎に計測値を送信している。計測値の送信間隔としては、本例の1/30秒に代えて、より短い時間を設定しても良く、より長い時間を設定しても良い。
【0027】
次に、遠隔制御装置6は、図1及び図4のごとく、各種の演算処理を実行可能な装置本体61と、表示手段である液晶ディスプレイ62と、キーボード64・マウス63等の入力手段と、を組み合わせたPC装置である。装置本体61は、演算処理を実行するCPU600のほか、ROM611、RAM613、ハードディスクドライブ615等の記憶手段、無線通信による通信手段618を含むI/O617を備えている。装置本体61は、システムを動作させるためのソフトウェアの実行により、以下の各手段としての機能を実現している。
【0028】
(1)位置検知手段601
固定カメラ110による誘導走行エリア1Aのエリア画像を利用して自動搬送車2の位置及び姿勢を検知する手段である。本例では、自動搬送車2の上面に取り付けられたLEDランプ37を検出してその位置を特定することで自動搬送車2の位置及び姿勢を検知している。なお、本例では、固定カメラ110が所定の設置仕様で取り付けられ、その撮影範囲が座標的に既知となっている。そのため、位置検知手段601によって絶対的な位置を検知可能である。
【0029】
(2)経路設定手段602
液晶ディスプレイ62による表示とマウス操作とを組み合わせたGUI(グラフィカルユーザーインターフェース)を利用して入力された移動経路を経路データとして設定する手段である。経路データは、誘導走行エリア1A及び自律走行エリア1Bにおいて座標的に表される経路マップのデータである。経路データは、RAM613の記憶エリアに格納される。
(3)変位算出手段603
自動搬送車2から受信する計測値(移動速度及び移動方向)に基づいて、自動搬送車2の変位(計測変位)を計算により求める手段である。変位算出手段603は、所定の時間に渡って自動搬送車2から随時受信する計測値を時間的に積分することで、その所定の時間内の自動搬送車2の移動に対応する計測変位を算出する。
【0030】
(4)第1の補正係数算出手段604
自動搬送車2による計測値の精度を向上するための第1の補正係数を計算により求める手段である。第1の補正係数算出手段604は、自動搬送車2が誘導走行エリア1Aを移動しているときに、位置検知手段601による検知位置の時間的な差分を表す実変位と、対応する時間について変位算出手段603が算出した計測変位と、を対比することで、第1の補正係数を算出する。なお、本例では、0.8秒間の実変位と計測変位とを対比して第1の補正係数を算出している。対比する対象の時間としては、本例の0.8秒間に代えて、これよりも長い時間や短い時間を設定できる。
【0031】
(5)補正変位算出手段605
自動搬送車2による計測値を第1の補正係数により補正した補正計測値を時間的に積分することで自動搬送車2の補正計測変位を算出する手段である。補正変位算出手段605は、所定の時間に渡って補正計測値を時間的に積分することで、その所定の時間内の移動に対応する補正計測変位を算出する。
【0032】
(6)第2の補正係数算出手段606
自律走行エリア1B内の自律走行経路10Bにおける補正計測値の算出精度をさらに向上するための第2の補正係数を計算により求める手段である。第2の補正係数算出手段606は、自律走行経路10B(図1)について補正変位算出手段605が算出した補正計測変位と、その自律走行経路10Bのスタート位置(自律走行エリア1Bへの進入時の位置検知手段601による検知位置)と終了位置(誘導走行エリア1Aに復帰したときの位置検知手段601による検知位置)との差分を表す実変位と、を対比することにより、第2の補正係数を算出する。なお、自律走行経路10Bにおける補正計測変位は、誘導走行エリア1Aを移動中に算出された第1の補正係数の平均値を利用して算出される。
【0033】
(7)移動目標設定手段607
自動搬送車2を移動させる目標位置、及び目標位置までの移動経路を自動搬送車2に設定する手段である。移動目標設定手段607は、自動搬送車2の現在位置及び前記経路データに基づいて、1.0秒後に自動搬送車2を移動させる先の目標位置及び移動経路を設定する。自動搬送車2が誘導走行エリア1Aに位置している場合には、位置検知手段601による検知位置が自動搬送車2の現在位置として利用される。一方、自律走行エリア1Bの場合には、自律走行エリア1Bに進入時の前記スタート位置に対して前記補正計測変位を足し合わせた位置が現在位置として利用される。なお、本例の移動経路は、目標位置に移動する際の経路をなす円弧の大きさ、及びその円弧の中心位置によって表される。なお、本例では、目標位置及び移動経路を設定するに当たって、1.0秒後という制御上の時間を設定している。この時間としては、本例の1.0秒よりも長い時間であっても良く、短い時間であっても良い。
【0034】
(8)異常報知手段608
自動搬送車2が誘導走行エリア1Aを移動しているときに、前記実変位と前記計測変位とを比較し、その差分が所定の閾値以上であったときに異常と判断して報知する手段である。本例の異常報知手段608は、異常と判断したとき、その旨を液晶ディスプレイ62の表示画面に表示することで異常を報知する。なお、誘導走行エリア1Aを移動中の異常の原因としては、自動搬送車2のトラブルのほか、走行路面に付着したオイル等のトラブルがある。
【0035】
以上のような構成の本例の自動搬送システム1の動作について、図5及び図6のフロー図に沿って説明する。図5は、誘導走行エリア1Aに対応する遠隔制御装置6の制御フローである。図6は、自律走行エリア1Bに対応する遠隔制御装置6の制御フローである。
【0036】
自動搬送車2が誘導走行エリア1Aを移動しているとき、遠隔制御装置6は、図5のごとく随時、固定カメラ110によるエリア画像に基づいて検知位置を取得する(ステップS101)。さらに、この検知位置とRAM613に記憶された経路データとに基づいて1.0秒後の目標位置及び移動経路を算出し、制御信号として自動搬送車2に送信する(ステップS102)。
【0037】
自動搬送車2からは随時、計測値(移動速度及び移動方向)を受信する(ステップS103)。遠隔制御装置6は、計測値を受信する毎に直近の0.8秒間に渡る自動搬送車2の変位である計測変位を算出する(ステップS104)。そして、その0.8秒間の自動搬送車2の実変位と、算出した計測変位と、を対比して(ステップS105)、第1の補正係数を算出する(ステップS106)。なお、このとき、実変位と計測変位との差分が所定の閾値を超えたときには異常と判断され、その旨が報知される。
【0038】
遠隔制御装置6は、自動搬送車2が自律走行エリア1Bとの境界に到達するまで、以上の処理ステップを繰り返し実行する(ステップS107:NO)。その後、自動搬送車2が自律走行エリア1Bとの境界に到達した場合には(ステップS107:YES)、遠隔制御装置6は、その境界位置に当たる検知位置を自律走行経路10Bのスタート位置として記憶すると共に(ステップS108)、誘導走行エリア1Aを移動中に算出した第1の補正係数の平均値を記憶する。
【0039】
自動搬送車2が自律走行エリア1Bを移動しているとき、遠隔制御装置6は、図6のごとく随時、自動搬送車2から移動速度及び移動方向の計測値を受信する(ステップS201)。計測値を受信する毎に、記憶する第1の補正係数により補正して補正計測値を算出し(ステップS202)、さらに、自律走行エリア1Bに進入してからの補正計測値を時間的に積分して補正計測変位を算出する(ステップS203)。RAM613に格納したスタート位置にその補正計測変位を足し合わせれば、自動搬送車2の現在位置を算出できる(ステップS204)。遠隔制御装置6は、上記のように算出した現在位置、及びRAM613に格納された経路データに基づいて、1.0秒後の移動目標及び移動経路を算出し、制御信号として自動搬送車2に向けて送信する(ステップS205)。
【0040】
遠隔制御装置6は、自動搬送車2が誘導走行エリア1Aとの境界に到達するまで、以上の処理ステップを繰り返し実行する(ステップS206:NO)。その後、自動搬送車2が誘導走行エリア1Aとの境界に到達した場合には(ステップS206:YES)、遠隔制御装置6は、その境界位置に当たる検知位置を自律走行経路10Bの終了位置として記憶すると共に(ステップS207)、自律走行経路10Bのスタート位置と終了位置との差分を表す実変位を算出する(ステップS208)。そして、この実変位と、自律走行経路10Bにおける補正計測変位と、を対比して、第2の補正係数を算出する(ステップS209)。
【0041】
遠隔制御装置6が算出する第2の補正係数は、自律走行経路10Bの路面状況が反映された補正係数である。そのため、この第2の補正係数は、自動搬送車2が、再度、自律走行経路10Bを移動する際に有用となる。第1の補正係数に加えて、第2の補正係数により計測値を補正すれば、自律走行経路10Bの路面状況を反映して計測値の精度を向上でき、現在位置を一層高精度に算出できる。自律走行経路10Bを移動中に算出される現在位置の精度が向上すれば、自動搬送車2の自律走行を一層精度高く制御できるようになる。
【0042】
以上の通り本例の自動搬送システム1は、誘導走行エリア1Aと自律走行エリア1Bとを組み合わせることにより、固定カメラ110の設置コストを抑制しつつ、走行経路の変更要求に柔軟に対応できる優れたシステムになっている。
【0043】
なお、自律航法手段を自動搬送車2に具備させることも良い。自律航法手段を備えていれば、自動搬送車2に作用する外乱、例えば、車体の向きを変動させるような外力、床面のスベリや起伏等をある程度、吸収できるようになる。自律航法手段としては、例えば、角速度センサ、加速度センサ、速度センサ等を利用した手段が考えられる。
【0044】
本例の遠隔制御装置6が備える各手段の機能は、経路設定手段602が備えるGUI機能を除いて、自動搬送車2側で実現することも可能である。例えば、固定カメラ110の画像データを取り込めば、自動搬送車2側で自分の位置を計算することも可能である。遠隔制御装置6が算出した現在位置を取り込めば、予め記憶した経路データと対比して目標位置や移動経路を自動搬送車2側で算出することも可能である。ただし、自動搬送車2側で補正係数を算出する場合には、他の車体でも利用可能なようにその補正係数を遠隔制御装置6に送信しておくことが良い。
【0045】
(実施例2)
本例は、実施例1の自動搬送システムを基にして、走行エリアの構成を変更した例である。この内容について、図7及び図8を参照して説明する。
図7は、誘導走行エリア1Aから自律走行エリア1Bを経由して別の誘導走行エリア1Aに進入する移動経路の例である。
図8は、自律走行エリア1Bに磁気テープ(導線)101、番地マーカ102が敷設された移動経路の例である。番地マーカ102に位置情報を関係付けしておくことも良い。自動搬送車2が番地マーカ102を読み取りできたときに、実施例1と同様のスタート位置と、番地マーカ102が表すマーカ位置と、の差分を実変位として取り扱いでき、第2の補正係数を算出できるようになる。
なお、その他の構成及び作用効果は実施例1と同様である。
【0046】
以上、実施例のごとく本発明の具体例を詳細に説明したが、これらの具体例は、特許請求の範囲に包含される技術の一例を開示しているにすぎない。言うまでもなく、具体例の構成や数値等によって、特許請求の範囲が限定的に解釈されるべきではない。特許請求の範囲は、公知技術や当業者の知識等を利用して前記具体例を多様に変形あるいは変更した技術を包含している。
【符号の説明】
【0047】
1 自動搬送システム
1A 誘導走行エリア
1B 自律走行エリア
10B 自律走行経路
110 固定カメラ
2 自動搬送車
281 角速度センサ
20 車体
3 駆動ユニット
331 駆動輪
50 制御ユニット
511 走行制御手段
513 移動計測手段
515 通信手段
6 遠隔制御装置
601 位置検知手段
602 経路設定手段
603 変位算出手段
604 第1の補正係数算出手段
605 補正変位算出手段
606 第2の補正係数算出手段
607 移動目標設定手段
608 異常報知手段
618 通信手段
【特許請求の範囲】
【請求項1】
操舵可能な駆動輪を含む駆動ユニット、及び駆動ユニットを制御する制御ユニットを備えた自動搬送車と、該自動搬送車の位置を検知する位置検知手段と、を備え、予定された経路に沿って前記自動搬送車を移動させる自動搬送システムであって、
前記自動搬送車が移動するエリアとして、前記位置検知手段による検知位置を利用して前記自動搬送車が制御される誘導走行エリア、及び前記自動搬送車の位置が検知されないエリアであって前記検知位置を利用することなく前記自動搬送車が制御される自律走行エリアが設定されている自動搬送システム。
【請求項2】
請求項1において、前記位置検知手段は、前記誘導走行エリアを撮影してエリア画像を取得する固定カメラを含み、該エリア画像の中から前記自動搬送車を検出してその位置を検知する手段である自動搬送システム。
【請求項3】
請求項1又は2において、前記自動搬送車の移動速度及び移動方向を計測する移動計測手段と、
該移動計測手段による計測値を時間的に積分することで前記自動搬送車の変位を算出する変位算出手段と、
前記自動搬送車が前記誘導走行エリアを移動しているときに、前記位置検知手段による検知位置の時間的な差分である実変位と、対応する時間について前記変位算出手段が算出した計測変位と、を対比することで、前記計測値の精度を向上するための第1の補正係数を算出する第1の補正係数算出手段と、
前記移動計測手段による計測値を前記第1の補正係数により補正した補正計測値を時間的に積分することで前記自動搬送車の補正計測変位を算出する補正変位算出手段と、
前記自動搬送車が前記誘導走行エリアから前記自律走行エリアに進入した後、再度、前記誘導走行エリアへ進入するまでの自律走行経路について、前記自律走行エリアに進入したときの前記位置検知手段による検知位置と前記誘導走行エリアに復帰したときの前記位置検知手段による検知位置との差分を表す実変位と、前記自律走行経路の移動に費やされた時間について前記補正変位算出手段が算出した補正計測変位と、を対比することにより、前記補正計測値の精度を向上するための第2の補正係数を算出する第2の補正係数算出手段と、を備えた自動搬送システム。
【請求項4】
請求項3において、前記自動搬送車が前記誘導走行エリアを移動しているとき、前記実変位と前記計測変位との差分について閾値処理を施し、所定の閾値を超えたときに異常と判断して報知する異常報知手段を備えた自動搬送システム。
【請求項1】
操舵可能な駆動輪を含む駆動ユニット、及び駆動ユニットを制御する制御ユニットを備えた自動搬送車と、該自動搬送車の位置を検知する位置検知手段と、を備え、予定された経路に沿って前記自動搬送車を移動させる自動搬送システムであって、
前記自動搬送車が移動するエリアとして、前記位置検知手段による検知位置を利用して前記自動搬送車が制御される誘導走行エリア、及び前記自動搬送車の位置が検知されないエリアであって前記検知位置を利用することなく前記自動搬送車が制御される自律走行エリアが設定されている自動搬送システム。
【請求項2】
請求項1において、前記位置検知手段は、前記誘導走行エリアを撮影してエリア画像を取得する固定カメラを含み、該エリア画像の中から前記自動搬送車を検出してその位置を検知する手段である自動搬送システム。
【請求項3】
請求項1又は2において、前記自動搬送車の移動速度及び移動方向を計測する移動計測手段と、
該移動計測手段による計測値を時間的に積分することで前記自動搬送車の変位を算出する変位算出手段と、
前記自動搬送車が前記誘導走行エリアを移動しているときに、前記位置検知手段による検知位置の時間的な差分である実変位と、対応する時間について前記変位算出手段が算出した計測変位と、を対比することで、前記計測値の精度を向上するための第1の補正係数を算出する第1の補正係数算出手段と、
前記移動計測手段による計測値を前記第1の補正係数により補正した補正計測値を時間的に積分することで前記自動搬送車の補正計測変位を算出する補正変位算出手段と、
前記自動搬送車が前記誘導走行エリアから前記自律走行エリアに進入した後、再度、前記誘導走行エリアへ進入するまでの自律走行経路について、前記自律走行エリアに進入したときの前記位置検知手段による検知位置と前記誘導走行エリアに復帰したときの前記位置検知手段による検知位置との差分を表す実変位と、前記自律走行経路の移動に費やされた時間について前記補正変位算出手段が算出した補正計測変位と、を対比することにより、前記補正計測値の精度を向上するための第2の補正係数を算出する第2の補正係数算出手段と、を備えた自動搬送システム。
【請求項4】
請求項3において、前記自動搬送車が前記誘導走行エリアを移動しているとき、前記実変位と前記計測変位との差分について閾値処理を施し、所定の閾値を超えたときに異常と判断して報知する異常報知手段を備えた自動搬送システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−101487(P2013−101487A)
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願番号】特願2011−244720(P2011−244720)
【出願日】平成23年11月8日(2011.11.8)
【出願人】(593018208)株式会社シンテックホズミ (8)
【Fターム(参考)】
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願日】平成23年11月8日(2011.11.8)
【出願人】(593018208)株式会社シンテックホズミ (8)
【Fターム(参考)】
[ Back to top ]