
自動検査サンプル取り扱いワークシステム用のまぎれ込み防止ゲート
一次コンベヤが第2サンプルを移送しつつあるときに、衝突する可能性のある地点のところで、移動している二次コンベヤ上の第1サンプルを移動している一次コンベヤ上へ移す方法である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自動コンベヤ・システムによってサンプルを供給される2つまたはそれ以上の独立処理ステーションを備えた自動臨床サンプル取り扱いワークシステムに関する。より詳しくは、本発明は、コンベヤ上のサンプルと干渉することなく処理ステーションからコンベヤにサンプルを戻すことができる方法に関する。
【背景技術】
【0002】
現在開発されている臨床診断アナライザでは、体液サンプル、たとえば、尿、血清、血漿、脳脊髄液などの化学評価分析および免疫評価分析の操作を完全自動化するために複雑さ、精巧さのレベルが高くなっている。これらの体液サンプルのほとんどは開口した、または、キャップ閉鎖式のサンプル・チューブ内に収容されるのが普通である。一般的に、患者の生体サンプル内の被検物質と評価分析の実施中に使用される試薬との化学反応により、アナライザが測定することのできる種々の信号を発生する。これらの信号から、サンプル内の被検物質の濃度を算出することができる。
【0003】
多種多様な自動化学アナライザがこの技術分野では知られており、分析メニューを増やし、処理量を増大させ、所用時間を短縮し、必要サンプル量を減少させるべく絶えず改良されている。たとえば、米国特許第6,103,193号、同第6,027,691号および同第5,482,861号を参照されたい。これらの改良はそれ自体必要ではあるけれども、区分け、バッチ準備、個別のサンプル成分に分離するためのサンプル・チューブの遠心分離、流体アクセスを容易にするためのキャップ取り外しなどのような事前の分析サンプル準備、取り扱い操作の自動化でそれに対応する充分な進歩がなければ、改良が阻まれる可能性がある。
【0004】
自動サンプル予備処理システムは、一般的に、米国特許第5,178,834号および同第5,209,903号に記載されているように、被検物をアナライザに搬送するためのコンベヤ・システムを使用する。このようなシステムの代表例では、サンプルは、一次コンベヤによってアナライザへ移送され、ロボット様装置によって一次コンベヤから取り出され、隣接したアナライザのサンプル採取領域に置かれるか、または、サンプルを隣接したアナライザのサンプル採取領域に移送するアナライザ専用コンベヤに対して往復移送させられる。後者の例においては、充分なサンプル・アリクォットがサンプルから取り出されているときには、サンプルは一次コンベヤに戻され、アナライザ専用コンベヤから一次コンベヤに移送される。
【0005】
自動臨床化学サンプル取り扱いワークステーションがますます複雑になるにつれて、サンプルが移送過程で互いに干渉するという事例数も増えている。明らかに、回避すべき問題は、アナライザ専用コンベヤから移送しつつあるサンプルと既に一次コンベヤ上にあり、移送されつつあるサンプルとのなんらかの形の干渉である。
【0006】
米国特許第6,019,945号が、コンベアラインといくつかのアナライザの各々に形成されたサンプリング領域との間でサンプル容器ホルダを移送するための移送機構であって、複数のアナライザのそれぞれに接続可能である移送機構を開示している。少なくとも2つのアナライザ単位は、試薬供給手段のタイプ、分析することができる分析単位体の数、単位時間あたりに処理することができる検査の数または処理されるべきサンプルの種類において互いに異なっている。
【0007】
米国特許第5,087,423号が、複数の分析モジュール、複数の分析ルートおよび少なくとも1つの分析モジュールをバイパスする少なくとも1つのバイパス・ルートが配置されている構造を開示している。各分析モジュールは、1つまたはそれ以上の項目に関してサンプルを分析することができ、モジュールの導入側から連続的に供給されるサンプルが各モジュールに選択的に給送される。
【0008】
米国特許第6,060,022号では、開いた容器内の予備処理したサンプルを独立型アナライザと連動して作動するロボット装置に自動的に与える。サンプル・チューブの的確および精密な取り扱いを行うためには、種々のロボット取り扱い装置が必要に応じてチューブ・キャリアからチューブを自動的かつ確実に取り出したり、交換したりすることができるようにサンプル・チューブ・キャリア内でチューブを正確に位置決め及び整列させることが重要である。
【0009】
これらの従来技術システムはサンプル取り扱いおよび処理量を向上させてきたが、それでも対処されなかった問題があった。それは、移動しているコンベヤ・ベルトが1つのサンプルを移送している間にこのコンベヤ・ベルト上の別のサンプルを置き換え、これら2つのサンプルのどちらにも悪影響を与えることがないということを可能にするという課題である。
【発明の概要】
【発明が解決しようとする課題】
【0010】
本発明は、移動している一次コンベヤが1つのサンプルを移動している間にこのコンベヤ上の別のサンプルと置き換え、しかも2つのサンプルのどちらにも悪影響を与えることがない方法を提供する。第1の工程として、一次コンベヤに移送される任意のサンプルを、アナライザ専用コンベヤから一次コンベヤ上へ移送しているサンプルの上流側の位置で停止させるか、または、減速させる。第2工程として、サンプルに障害を与える可能性のある急激な、すなわち、制御できない動きを排除するように一次コンベヤ上のサンプルを、停止させるか、減速させる。サンプル取扱いワークシステムを操作するこの新しい方法は、移動している処理中のサンプルについての全体的な信頼性および効率を向上させることによって臨床検査室の自動サンプル取扱いワークシステムを操作する能力を向上させる。
【0011】
本発明ならびに他の目的およびさらに別の特徴をより良く理解して貰うためには、種々の好ましい実施形態についての以下の詳細な説明を添付図面と関連させながら参照されたい。
【図面の簡単な説明】
【0012】
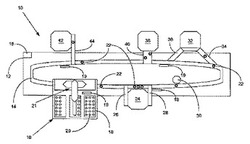
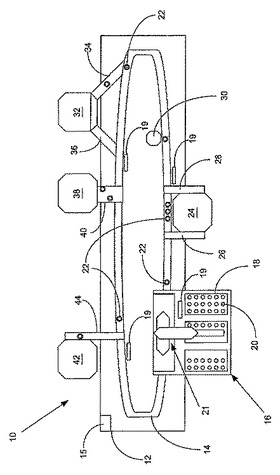
【図1】本発明を有利に使用できるいくつかの化学分析事前処理装置と協働して制御されるコンベヤを含む自動サンプル取り扱いシステムの簡略化した概略平面図である。
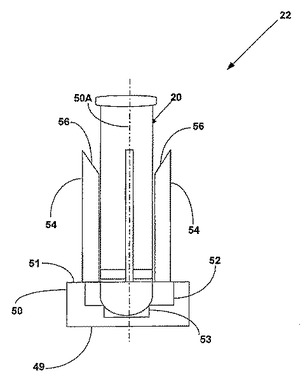
【図2】図1のサンプル取り扱いシステムで使用するようになっているサンプル・チューブ・キャリアの簡略立面図である。
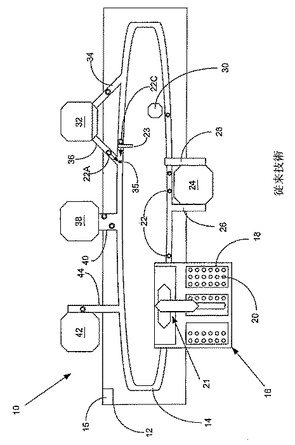
【図3】図1のサンプル取り扱いシステム内のサンプルを取り扱う従来技術の方法の簡略平面図である。
【図4】従来技術の第1の不首尾例を示している、図3の一部の拡大図である。
【図5】従来技術の第2の不首尾例を示している、図3の一部の拡大図である。
【図6】6、6A、6B、6Cは、図1の自動サンプル取り扱いシステム内のサンプルを取り扱う本発明の概略図である。
【図7】図6のサンプル取り扱い装置の一部破断斜視図である。
【図8】図6のサンプル取り扱い装置の拡大斜視図である。
【図9】図6のサンプル取り扱い装置の展開斜視図である。
【図10】図6のサンプル取り扱い装置の重要な構成部の頂平面図である。
【図11】図1のサンプル取り扱いシステムに装着した図6のサンプル取り扱い装置を示している。
【発明を実施するための形態】
【0013】
図1を参照して、ここには、本発明を実施するようになっている多段サンプル・ラック18内に収容された複数のサンプル容器20(代表的には、サンプル・テスト・チューブ)を必要に応じて自動的に予備処理することができる自動臨床化学サンプル取り扱いワークシステム10を示してある。代表的には、自動的に処理すべき患者被検物が、キャップで閉じることのできる複数の容器、たとえば、テスト・チューブに入れられてサンプル取り扱いシステム10に与えられる。サンプル容器20の各々は、患者の識別情報ならびに場合により容器内のサンプルに行うべき評価分析手順を示す容器識別マーク、たとえば、バーコードを備えている。容器は、普通、付加的な識別マークを設けてあってもよいラックのような1つまたはそれ以上のホルダ内に保持される。
【0014】
サンプル取扱いワークシステム10は、作動ベース12であって、この作動ベース上に設けてあるベルト様コンベヤ・トラック14が、サンプル・チューブ・キャリア22内に入っている複数の個々のサンプル・チューブ容器20をサンプル・チューブ装填/取り出しステーション16から自動遠心分離機24へ、キャップで閉ざされたサンプル容器20からキャップを自動的に取り外すためにキャップを自動的に取り外す自動チューブ・キャップ取り外し器30へおよび各サンプル容器20をサンプル・チューブ装填・取り出しロボット・ステーション16に戻す前に1つまたはそれ以上の通常の臨床アナライザ32、38、42へ、移送する作動ベース12を含む。ここで、4つ以上のアナライザ32、38および42をコンベヤ・トラック14によって連結してもよいが、説明を簡単にするために3つのアナライザしか図示していないことは了解されたい。サンプル取り扱いワークシステム10は、各サンプル・チューブ・キャリア22上、または、その中に設けた識別マークによってサンプル・チューブ容器20の位置を検出するための多数のセンサ(図示せず)を有する。このような追跡操作において普通のバーコード・リーダを使用してもよい。
【0015】
遠心分離機24および各アナライザ38、42、32は、大雑把に言って、それぞれ、コンベヤ・トラック14からサンプル・チューブ・キャリア22を取り出すための、サンプル・チューブ・キャリア22を、遠心分離機24へ、また、遠心分離機24から移動させるための、アナライザ38、42および32から、また、アナライザ38、42および32へ移動させ、そして、アナライザ38、42および32の内外に移動させるための、種々のロボット機構26および28、40および44、またはアナライザ・トラック34および36を備えている。代表的には、装填・取り出しステーション16は、従来通りに掴み用ロボット・ハンドを備えている少なくとも2つのロボット・アーム21を包含している。
【0016】
サンプル取り扱いワークシステム10は、在来のコンピュータ15、好ましくは、システム10の一部または別体部として収容されているマイクロプロセッサ・ベースの中央演算処理装置CPU15によって制御されて、サンプル・チューブ・キャリア22を様々なタイプの評価分析処理が行われる各作動ステーション24、30、32、38、42へ移動させる。CPU15は、イリノイ州ディアフィールドのDade Behring Inc.の販売するDimension(登録商標)型臨床化学アナライザで使用され、コンピュータ・ベースの電気機械制御プログラミングの当業者にとっては代表例であるソフトウェア、ファームウェアもしくはハードウェア・コマンド又は回路に従ってサンプル取り扱いシステム10を制御する。
【0017】
図2は、チューブ直径およびチューブ長手方向高さを有する、仮想線で示す円筒形サンプル・チューブ容器20を移送するための典型的なサンプル・チューブ・キャリア22の立面図である。このサンプル・チューブ・キャリアは、中心軸線50Aを有するほぼ円筒形の下方キャリア・ボディ50と、前記軸線に沿って形成してあり、キャリア・ボディ50の頂面51から底面49に向かって延びている円筒形の孔52とを包含する。軸線50Aに沿った中心を持つオプションのくぼみ53も示してあり、このくぼみ53は、臨床サンプル・チューブ容器20に普通に見られる丸い底部を収容するように設けてある。キャリア・ボディ50は、少なくとも2つの垂直方向のアーム54を有し、これらのアームは、円筒形孔52内に対称的に配置してあり、頂面51上方に或る距離にわたって延びている。垂直方向アーム54は、中心軸線50Aに向かって下向きにテーパが付けて示すテーパ付き上端56を包含する。
【0018】
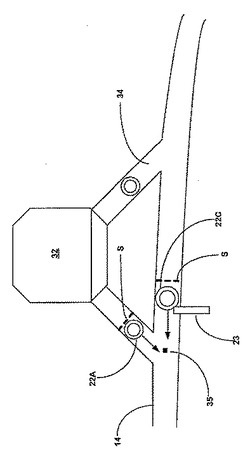
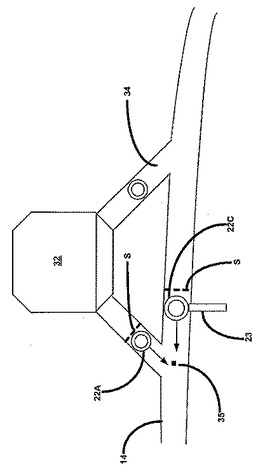
図3は、本発明で扱う代表的な例を示しており、この例では、臨床アナライザ32の要求通りに分析されたサンプル・チューブ・キャリア22Aが、アナライザ・トラック36に沿ってコンベヤ・トラック14(反時計回り方向に移動しているものとして示してある)へ戻されつつあり、その後、付加的な検査を受けるか、および/または、コンベヤ・トラック14から取り出されか、および/または、システム10内の保管場所に留められる。在来のセンサS、代表的には光線式または近接式のセンサSが、コンベヤ・トラック14に入るサンプル・チューブ・キャリア22Aとコンベヤ・トラック14に沿って移送されつつあるサンプル・チューブ・キャリア22Cとの干渉点35での潜在的な干渉を予想して、コンベヤ・トラック14に沿って計画通りに設けてある。図3に示す従来技術システムでは、コンベヤ・トラック14に隣接してセンサ作動プランジャ23を設置し、干渉点35に達する前にサンプル・チューブ・キャリア22Cの移動を止めるようにコンベヤ・トラック14の表面上方に突出するようになっているのが普通である。あるいは、センサ作動プランジャ23をアナライザ・トラック36に隣接して設置し、アナライザ・トラック36の表面から上方に突出し、干渉点35に達する前にサンプル・チューブ・キャリア22Aの移動を止めるようになっていることもある。図4に拡大して示すように、このような従来技術の解決策で生じる問題は、プランジャ23が、「遅い」ということであって、サンプル・チューブ・キャリア22Cと斜めに物理的に接触し、サンプル・チューブ20を傾かせ、おそらく、中に入っている液体患者サンプルをこぼす可能性があるということである。あるいは、図5に示すように、プランジャ23が、「もっと遅い」ということで、サンプル・チューブ・キャリア22Cをピン留めするように物理的に接触し、壁または通常コンベヤ・トラック14に沿ってレールに対してサンプル・チューブ・キャリア22Cをピン留めしてしまうこともある。
【0019】
これらおよび同様の問題は本発明によって解消される。本発明によれば、コンベヤ・トラック14に沿って移送されるサンプル・チューブ・キャリア22Cのどれもが、衝突する可能性のある地点35に接近するにつれてほぼプロペラ形の回転木戸60(図10)を通って案内される。ほぼプロペラ形の回転木戸60は、サンプル・チューブ・キャリア22Cを受け入れ、適当なプランジャでもって、サンプル・チューブ・キャリア22Aが衝突する可能性のある地点35に接近したときにはいつでもその回転を止め得るようになっている。発見したことは、急激な横方向の力がサンプルに加えられた場合、(サンプルの相互汚染の可能性と共に)再懸濁および/またはこぼれの可能性が高まるということである。サンプル経路に対してほぼ直角な動きを与える従来技術の止めゲートは潜在的にこのような問題を生じさせる。本発明は、こぼれまたは再懸濁を生じさせるほどの力を持たないようにゲート速度を落とすか、または、プランジャに或る程度の弾力性を与えるべく設計した向きを有するゲートを提供することによってこのような問題を回避している。これを達成すべく、本発明では、止めシリンダに回転木戸を停止させるか、または、その速度を落とさせ、サンプルを停止または減速させる。本発明の回転木戸を用いることによって、制動力の作用を弱め、サンプルを減速させることができる。
【0020】
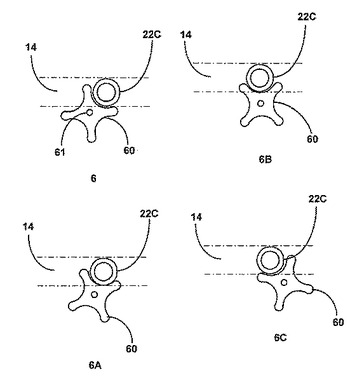
図6は、本発明の一例である装着ピン61まわりにコンベヤ・トラック14に隣接して回転自在に装着したほぼプロペラ形の回転木戸を概略的に示している。図6A、6B、6Cは、サンプル・チューブ・キャリア22Cがコンベヤ・トラック14に沿って移動するときにほぼプロペラ形の回転木戸60がどのようにして「時計方向」に回転するかを概略的に示している。
【0021】
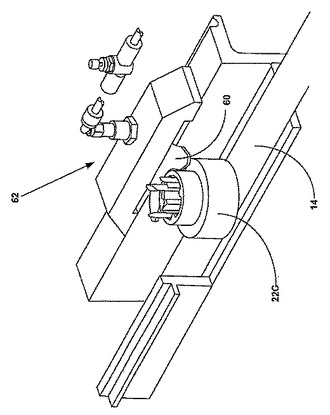
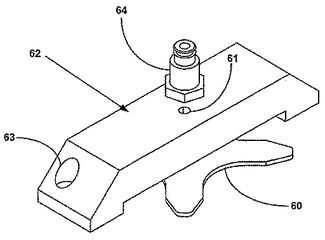
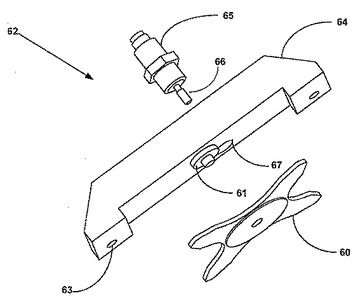
図7は、図6Bの概略図と同様の向きで回転木戸60内に受け止められたサンプル・チューブ・キャリア22Cを示す一部破断斜視図である。回転木戸60の回転を阻止して、サンプル・チューブ・キャリア22Aが潜在干渉点35に接近するときにはいつでもサンプル・チューブ・キャリア22Cの運動を停止させることができるように回転木戸錠止機構62(図9)が設けてある。あるいは、調節可能なけん引力を回転木戸60に加えてサンプル・チューブ・キャリア22Cを減速させるようにしてもよい。けん引力は、回転木戸60(図9)を完全に停止させるよりもむしろ、ピン66(図9)で回転木戸60を減速させるように調節されるプランジャ65(図9)を使用して加えてもよい。図8は、錠止機構62の下方の位置にある、図7に示している回転木戸60の簡略図である。この錠止機構62は、調節自在のプランジャ65を支持する取り付けブラケット64を包含し、このプランジャ65は、そのピン66がブラケット64にある開口部67を通して押し進められ、回転木戸60の回転を止めることができるように位置している。
【0022】
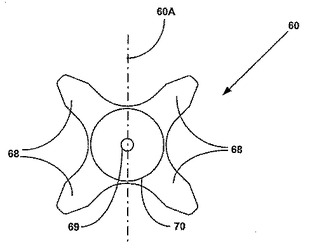
図10は、中心軸線60Aまわりに対称的に配置した2対の半径方向に延びるブレード67を包含する回転木戸60の一例を示している。ピン61を受け入れるサイズとなっている取り付け用ピンホール69が、中心軸線60Aまわりに対称的に配置した円形の取り付けパッド70中の中心に設けてある。
【0023】
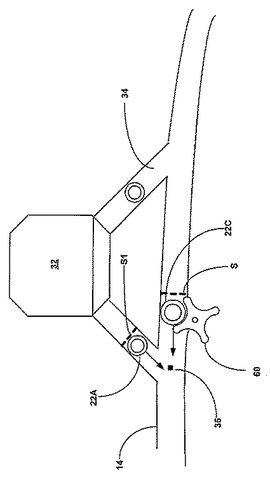
操作に当たって、図9、11に関連して説明したように、回転木戸錠止機構62の作動可能なプランジャ65は、通常、不作動位置にあり、その結果、回転木戸60は、ピン61上を自由に回転することができ、サンプル・チューブ・キャリア22Cが停止することなく干渉点35を通ってコンベヤ・トラック14に沿って移送され得るようになっている。あるいは、制動力を回転木戸60に加えて、サンプル・チューブ・キャリア22Cが干渉点35を通ってコンベヤ・トラック14に沿って移送されつつあるときにピン61上の回転を遅くし、サンプル・チューブ・キャリア22Cを減速させてもよい。結果的には、センサS1が、アナライザ32から解放され、干渉点35に接近している別のサンプル・チューブ・キャリア22Aを検出し、回転木戸錠止機構62のプランジャ65が作動させられ、ピン66が開口部67を貫いて押され、回転木戸60の回転を錠止し、そして、サンプル・チューブ・キャリア22Cが干渉点35を通ってコンベヤ・トラック14に沿って移送されるのを阻止する。プランジャ65は、在来の手段、たとえば、空気圧または電磁ソレノイドによって作動させることができる。サンプル・チューブ・キャリア22Aが干渉点35を通過した後、プランジャ65が非作動とされ、その結果、回転木戸60が再び自由に回転することができるようになり、サンプル・チューブ・キャリア22Cがコンベヤ・トラック14に沿って自由に移送されることができる。
【0024】
ここで、当業者であれば、ここに開示した発明の実施形態が発明の原理を説明するものであり、なお発明の範囲内にある他の変形例も使用し得ることは了解できよう。たとえば、本発明の明らかな変形例としては、より大きい直径のサンプル・チューブ・キャリア20の場合に好ましいかもしれない3つの半径方向に延びるブレード67を包含する回転木戸60がある。本発明の別の明らかな変形例としては、一次コンベヤの近くに回転自在に装着した複数のブレードを含む任意のプロペラ形回転木戸がある。
【技術分野】
【0001】
本発明は、自動コンベヤ・システムによってサンプルを供給される2つまたはそれ以上の独立処理ステーションを備えた自動臨床サンプル取り扱いワークシステムに関する。より詳しくは、本発明は、コンベヤ上のサンプルと干渉することなく処理ステーションからコンベヤにサンプルを戻すことができる方法に関する。
【背景技術】
【0002】
現在開発されている臨床診断アナライザでは、体液サンプル、たとえば、尿、血清、血漿、脳脊髄液などの化学評価分析および免疫評価分析の操作を完全自動化するために複雑さ、精巧さのレベルが高くなっている。これらの体液サンプルのほとんどは開口した、または、キャップ閉鎖式のサンプル・チューブ内に収容されるのが普通である。一般的に、患者の生体サンプル内の被検物質と評価分析の実施中に使用される試薬との化学反応により、アナライザが測定することのできる種々の信号を発生する。これらの信号から、サンプル内の被検物質の濃度を算出することができる。
【0003】
多種多様な自動化学アナライザがこの技術分野では知られており、分析メニューを増やし、処理量を増大させ、所用時間を短縮し、必要サンプル量を減少させるべく絶えず改良されている。たとえば、米国特許第6,103,193号、同第6,027,691号および同第5,482,861号を参照されたい。これらの改良はそれ自体必要ではあるけれども、区分け、バッチ準備、個別のサンプル成分に分離するためのサンプル・チューブの遠心分離、流体アクセスを容易にするためのキャップ取り外しなどのような事前の分析サンプル準備、取り扱い操作の自動化でそれに対応する充分な進歩がなければ、改良が阻まれる可能性がある。
【0004】
自動サンプル予備処理システムは、一般的に、米国特許第5,178,834号および同第5,209,903号に記載されているように、被検物をアナライザに搬送するためのコンベヤ・システムを使用する。このようなシステムの代表例では、サンプルは、一次コンベヤによってアナライザへ移送され、ロボット様装置によって一次コンベヤから取り出され、隣接したアナライザのサンプル採取領域に置かれるか、または、サンプルを隣接したアナライザのサンプル採取領域に移送するアナライザ専用コンベヤに対して往復移送させられる。後者の例においては、充分なサンプル・アリクォットがサンプルから取り出されているときには、サンプルは一次コンベヤに戻され、アナライザ専用コンベヤから一次コンベヤに移送される。
【0005】
自動臨床化学サンプル取り扱いワークステーションがますます複雑になるにつれて、サンプルが移送過程で互いに干渉するという事例数も増えている。明らかに、回避すべき問題は、アナライザ専用コンベヤから移送しつつあるサンプルと既に一次コンベヤ上にあり、移送されつつあるサンプルとのなんらかの形の干渉である。
【0006】
米国特許第6,019,945号が、コンベアラインといくつかのアナライザの各々に形成されたサンプリング領域との間でサンプル容器ホルダを移送するための移送機構であって、複数のアナライザのそれぞれに接続可能である移送機構を開示している。少なくとも2つのアナライザ単位は、試薬供給手段のタイプ、分析することができる分析単位体の数、単位時間あたりに処理することができる検査の数または処理されるべきサンプルの種類において互いに異なっている。
【0007】
米国特許第5,087,423号が、複数の分析モジュール、複数の分析ルートおよび少なくとも1つの分析モジュールをバイパスする少なくとも1つのバイパス・ルートが配置されている構造を開示している。各分析モジュールは、1つまたはそれ以上の項目に関してサンプルを分析することができ、モジュールの導入側から連続的に供給されるサンプルが各モジュールに選択的に給送される。
【0008】
米国特許第6,060,022号では、開いた容器内の予備処理したサンプルを独立型アナライザと連動して作動するロボット装置に自動的に与える。サンプル・チューブの的確および精密な取り扱いを行うためには、種々のロボット取り扱い装置が必要に応じてチューブ・キャリアからチューブを自動的かつ確実に取り出したり、交換したりすることができるようにサンプル・チューブ・キャリア内でチューブを正確に位置決め及び整列させることが重要である。
【0009】
これらの従来技術システムはサンプル取り扱いおよび処理量を向上させてきたが、それでも対処されなかった問題があった。それは、移動しているコンベヤ・ベルトが1つのサンプルを移送している間にこのコンベヤ・ベルト上の別のサンプルを置き換え、これら2つのサンプルのどちらにも悪影響を与えることがないということを可能にするという課題である。
【発明の概要】
【発明が解決しようとする課題】
【0010】
本発明は、移動している一次コンベヤが1つのサンプルを移動している間にこのコンベヤ上の別のサンプルと置き換え、しかも2つのサンプルのどちらにも悪影響を与えることがない方法を提供する。第1の工程として、一次コンベヤに移送される任意のサンプルを、アナライザ専用コンベヤから一次コンベヤ上へ移送しているサンプルの上流側の位置で停止させるか、または、減速させる。第2工程として、サンプルに障害を与える可能性のある急激な、すなわち、制御できない動きを排除するように一次コンベヤ上のサンプルを、停止させるか、減速させる。サンプル取扱いワークシステムを操作するこの新しい方法は、移動している処理中のサンプルについての全体的な信頼性および効率を向上させることによって臨床検査室の自動サンプル取扱いワークシステムを操作する能力を向上させる。
【0011】
本発明ならびに他の目的およびさらに別の特徴をより良く理解して貰うためには、種々の好ましい実施形態についての以下の詳細な説明を添付図面と関連させながら参照されたい。
【図面の簡単な説明】
【0012】
【図1】本発明を有利に使用できるいくつかの化学分析事前処理装置と協働して制御されるコンベヤを含む自動サンプル取り扱いシステムの簡略化した概略平面図である。
【図2】図1のサンプル取り扱いシステムで使用するようになっているサンプル・チューブ・キャリアの簡略立面図である。
【図3】図1のサンプル取り扱いシステム内のサンプルを取り扱う従来技術の方法の簡略平面図である。
【図4】従来技術の第1の不首尾例を示している、図3の一部の拡大図である。
【図5】従来技術の第2の不首尾例を示している、図3の一部の拡大図である。
【図6】6、6A、6B、6Cは、図1の自動サンプル取り扱いシステム内のサンプルを取り扱う本発明の概略図である。
【図7】図6のサンプル取り扱い装置の一部破断斜視図である。
【図8】図6のサンプル取り扱い装置の拡大斜視図である。
【図9】図6のサンプル取り扱い装置の展開斜視図である。
【図10】図6のサンプル取り扱い装置の重要な構成部の頂平面図である。
【図11】図1のサンプル取り扱いシステムに装着した図6のサンプル取り扱い装置を示している。
【発明を実施するための形態】
【0013】
図1を参照して、ここには、本発明を実施するようになっている多段サンプル・ラック18内に収容された複数のサンプル容器20(代表的には、サンプル・テスト・チューブ)を必要に応じて自動的に予備処理することができる自動臨床化学サンプル取り扱いワークシステム10を示してある。代表的には、自動的に処理すべき患者被検物が、キャップで閉じることのできる複数の容器、たとえば、テスト・チューブに入れられてサンプル取り扱いシステム10に与えられる。サンプル容器20の各々は、患者の識別情報ならびに場合により容器内のサンプルに行うべき評価分析手順を示す容器識別マーク、たとえば、バーコードを備えている。容器は、普通、付加的な識別マークを設けてあってもよいラックのような1つまたはそれ以上のホルダ内に保持される。
【0014】
サンプル取扱いワークシステム10は、作動ベース12であって、この作動ベース上に設けてあるベルト様コンベヤ・トラック14が、サンプル・チューブ・キャリア22内に入っている複数の個々のサンプル・チューブ容器20をサンプル・チューブ装填/取り出しステーション16から自動遠心分離機24へ、キャップで閉ざされたサンプル容器20からキャップを自動的に取り外すためにキャップを自動的に取り外す自動チューブ・キャップ取り外し器30へおよび各サンプル容器20をサンプル・チューブ装填・取り出しロボット・ステーション16に戻す前に1つまたはそれ以上の通常の臨床アナライザ32、38、42へ、移送する作動ベース12を含む。ここで、4つ以上のアナライザ32、38および42をコンベヤ・トラック14によって連結してもよいが、説明を簡単にするために3つのアナライザしか図示していないことは了解されたい。サンプル取り扱いワークシステム10は、各サンプル・チューブ・キャリア22上、または、その中に設けた識別マークによってサンプル・チューブ容器20の位置を検出するための多数のセンサ(図示せず)を有する。このような追跡操作において普通のバーコード・リーダを使用してもよい。
【0015】
遠心分離機24および各アナライザ38、42、32は、大雑把に言って、それぞれ、コンベヤ・トラック14からサンプル・チューブ・キャリア22を取り出すための、サンプル・チューブ・キャリア22を、遠心分離機24へ、また、遠心分離機24から移動させるための、アナライザ38、42および32から、また、アナライザ38、42および32へ移動させ、そして、アナライザ38、42および32の内外に移動させるための、種々のロボット機構26および28、40および44、またはアナライザ・トラック34および36を備えている。代表的には、装填・取り出しステーション16は、従来通りに掴み用ロボット・ハンドを備えている少なくとも2つのロボット・アーム21を包含している。
【0016】
サンプル取り扱いワークシステム10は、在来のコンピュータ15、好ましくは、システム10の一部または別体部として収容されているマイクロプロセッサ・ベースの中央演算処理装置CPU15によって制御されて、サンプル・チューブ・キャリア22を様々なタイプの評価分析処理が行われる各作動ステーション24、30、32、38、42へ移動させる。CPU15は、イリノイ州ディアフィールドのDade Behring Inc.の販売するDimension(登録商標)型臨床化学アナライザで使用され、コンピュータ・ベースの電気機械制御プログラミングの当業者にとっては代表例であるソフトウェア、ファームウェアもしくはハードウェア・コマンド又は回路に従ってサンプル取り扱いシステム10を制御する。
【0017】
図2は、チューブ直径およびチューブ長手方向高さを有する、仮想線で示す円筒形サンプル・チューブ容器20を移送するための典型的なサンプル・チューブ・キャリア22の立面図である。このサンプル・チューブ・キャリアは、中心軸線50Aを有するほぼ円筒形の下方キャリア・ボディ50と、前記軸線に沿って形成してあり、キャリア・ボディ50の頂面51から底面49に向かって延びている円筒形の孔52とを包含する。軸線50Aに沿った中心を持つオプションのくぼみ53も示してあり、このくぼみ53は、臨床サンプル・チューブ容器20に普通に見られる丸い底部を収容するように設けてある。キャリア・ボディ50は、少なくとも2つの垂直方向のアーム54を有し、これらのアームは、円筒形孔52内に対称的に配置してあり、頂面51上方に或る距離にわたって延びている。垂直方向アーム54は、中心軸線50Aに向かって下向きにテーパが付けて示すテーパ付き上端56を包含する。
【0018】
図3は、本発明で扱う代表的な例を示しており、この例では、臨床アナライザ32の要求通りに分析されたサンプル・チューブ・キャリア22Aが、アナライザ・トラック36に沿ってコンベヤ・トラック14(反時計回り方向に移動しているものとして示してある)へ戻されつつあり、その後、付加的な検査を受けるか、および/または、コンベヤ・トラック14から取り出されか、および/または、システム10内の保管場所に留められる。在来のセンサS、代表的には光線式または近接式のセンサSが、コンベヤ・トラック14に入るサンプル・チューブ・キャリア22Aとコンベヤ・トラック14に沿って移送されつつあるサンプル・チューブ・キャリア22Cとの干渉点35での潜在的な干渉を予想して、コンベヤ・トラック14に沿って計画通りに設けてある。図3に示す従来技術システムでは、コンベヤ・トラック14に隣接してセンサ作動プランジャ23を設置し、干渉点35に達する前にサンプル・チューブ・キャリア22Cの移動を止めるようにコンベヤ・トラック14の表面上方に突出するようになっているのが普通である。あるいは、センサ作動プランジャ23をアナライザ・トラック36に隣接して設置し、アナライザ・トラック36の表面から上方に突出し、干渉点35に達する前にサンプル・チューブ・キャリア22Aの移動を止めるようになっていることもある。図4に拡大して示すように、このような従来技術の解決策で生じる問題は、プランジャ23が、「遅い」ということであって、サンプル・チューブ・キャリア22Cと斜めに物理的に接触し、サンプル・チューブ20を傾かせ、おそらく、中に入っている液体患者サンプルをこぼす可能性があるということである。あるいは、図5に示すように、プランジャ23が、「もっと遅い」ということで、サンプル・チューブ・キャリア22Cをピン留めするように物理的に接触し、壁または通常コンベヤ・トラック14に沿ってレールに対してサンプル・チューブ・キャリア22Cをピン留めしてしまうこともある。
【0019】
これらおよび同様の問題は本発明によって解消される。本発明によれば、コンベヤ・トラック14に沿って移送されるサンプル・チューブ・キャリア22Cのどれもが、衝突する可能性のある地点35に接近するにつれてほぼプロペラ形の回転木戸60(図10)を通って案内される。ほぼプロペラ形の回転木戸60は、サンプル・チューブ・キャリア22Cを受け入れ、適当なプランジャでもって、サンプル・チューブ・キャリア22Aが衝突する可能性のある地点35に接近したときにはいつでもその回転を止め得るようになっている。発見したことは、急激な横方向の力がサンプルに加えられた場合、(サンプルの相互汚染の可能性と共に)再懸濁および/またはこぼれの可能性が高まるということである。サンプル経路に対してほぼ直角な動きを与える従来技術の止めゲートは潜在的にこのような問題を生じさせる。本発明は、こぼれまたは再懸濁を生じさせるほどの力を持たないようにゲート速度を落とすか、または、プランジャに或る程度の弾力性を与えるべく設計した向きを有するゲートを提供することによってこのような問題を回避している。これを達成すべく、本発明では、止めシリンダに回転木戸を停止させるか、または、その速度を落とさせ、サンプルを停止または減速させる。本発明の回転木戸を用いることによって、制動力の作用を弱め、サンプルを減速させることができる。
【0020】
図6は、本発明の一例である装着ピン61まわりにコンベヤ・トラック14に隣接して回転自在に装着したほぼプロペラ形の回転木戸を概略的に示している。図6A、6B、6Cは、サンプル・チューブ・キャリア22Cがコンベヤ・トラック14に沿って移動するときにほぼプロペラ形の回転木戸60がどのようにして「時計方向」に回転するかを概略的に示している。
【0021】
図7は、図6Bの概略図と同様の向きで回転木戸60内に受け止められたサンプル・チューブ・キャリア22Cを示す一部破断斜視図である。回転木戸60の回転を阻止して、サンプル・チューブ・キャリア22Aが潜在干渉点35に接近するときにはいつでもサンプル・チューブ・キャリア22Cの運動を停止させることができるように回転木戸錠止機構62(図9)が設けてある。あるいは、調節可能なけん引力を回転木戸60に加えてサンプル・チューブ・キャリア22Cを減速させるようにしてもよい。けん引力は、回転木戸60(図9)を完全に停止させるよりもむしろ、ピン66(図9)で回転木戸60を減速させるように調節されるプランジャ65(図9)を使用して加えてもよい。図8は、錠止機構62の下方の位置にある、図7に示している回転木戸60の簡略図である。この錠止機構62は、調節自在のプランジャ65を支持する取り付けブラケット64を包含し、このプランジャ65は、そのピン66がブラケット64にある開口部67を通して押し進められ、回転木戸60の回転を止めることができるように位置している。
【0022】
図10は、中心軸線60Aまわりに対称的に配置した2対の半径方向に延びるブレード67を包含する回転木戸60の一例を示している。ピン61を受け入れるサイズとなっている取り付け用ピンホール69が、中心軸線60Aまわりに対称的に配置した円形の取り付けパッド70中の中心に設けてある。
【0023】
操作に当たって、図9、11に関連して説明したように、回転木戸錠止機構62の作動可能なプランジャ65は、通常、不作動位置にあり、その結果、回転木戸60は、ピン61上を自由に回転することができ、サンプル・チューブ・キャリア22Cが停止することなく干渉点35を通ってコンベヤ・トラック14に沿って移送され得るようになっている。あるいは、制動力を回転木戸60に加えて、サンプル・チューブ・キャリア22Cが干渉点35を通ってコンベヤ・トラック14に沿って移送されつつあるときにピン61上の回転を遅くし、サンプル・チューブ・キャリア22Cを減速させてもよい。結果的には、センサS1が、アナライザ32から解放され、干渉点35に接近している別のサンプル・チューブ・キャリア22Aを検出し、回転木戸錠止機構62のプランジャ65が作動させられ、ピン66が開口部67を貫いて押され、回転木戸60の回転を錠止し、そして、サンプル・チューブ・キャリア22Cが干渉点35を通ってコンベヤ・トラック14に沿って移送されるのを阻止する。プランジャ65は、在来の手段、たとえば、空気圧または電磁ソレノイドによって作動させることができる。サンプル・チューブ・キャリア22Aが干渉点35を通過した後、プランジャ65が非作動とされ、その結果、回転木戸60が再び自由に回転することができるようになり、サンプル・チューブ・キャリア22Cがコンベヤ・トラック14に沿って自由に移送されることができる。
【0024】
ここで、当業者であれば、ここに開示した発明の実施形態が発明の原理を説明するものであり、なお発明の範囲内にある他の変形例も使用し得ることは了解できよう。たとえば、本発明の明らかな変形例としては、より大きい直径のサンプル・チューブ・キャリア20の場合に好ましいかもしれない3つの半径方向に延びるブレード67を包含する回転木戸60がある。本発明の別の明らかな変形例としては、一次コンベヤの近くに回転自在に装着した複数のブレードを含む任意のプロペラ形回転木戸がある。
【特許請求の範囲】
【請求項1】
第1サンプルが衝突する可能性のある地点を通過してしまうまで衝突する可能性のある地点の上流側の位置で一次コンベヤ上を移送されている第2サンプルを停止させることによって、一次コンベヤが第2のサンプルを移送しつつあるときに衝突する可能性のある地点のところで移動している二次コンベヤ上にある第1のサンプルを移動している一次コンベヤ上へ移す方法であって、第2サンプルを停止させるか、または、減速させるために、一次コンベヤに沿った、衝突する可能性のある地点の上流側の位置にサンプルを受け入れるようになっている回転可能なプロペラ形の回転木戸を設け、一次コンベヤ上にある第2サンプルを回転可能な回転木戸と係合させ、二次コンベヤ上の移動している第1のサンプルが衝突する可能性のある地点に接近するときはいつでも回転可能な回転木戸を停止させる上記方法。
【請求項2】
プロペラ形の回転木戸が、円形プレートの中心軸線まわりに対称的に配置された2対の半径方向に延びるブレードを含む、請求項1記載の方法。
【請求項3】
プロペラ形の回転木戸が、一次コンベヤの近くに回転自在に装着した複数のブレードを含む、請求項1記載の方法。
【請求項4】
第1サンプルが衝突する可能性のある地点を通過してしまうまで衝突する可能性のある地点の上流側の位置で一次コンベヤ上を移送されている第2サンプルを減速させることによって、一次コンベヤが第2のサンプルを移送しつつあるときに衝突する可能性のある地点のところで移動している二次コンベヤ上にある第1のサンプルを移動している一次コンベヤ上へ移す方法であって、第2サンプルを減速させるために、一次コンベヤに沿った、衝突する可能性のある地点の上流側の位置にサンプルを受け入れるようになっている回転可能なプロペラ形の回転木戸を設け、一次コンベヤ上にある第2サンプルを回転可能な回転木戸と係合させ、二次コンベヤ上の移動している第1のサンプルが衝突する可能性のある地点に接近するときはいつでも回転可能な回転木戸を部分的に阻止することを含む方法。
【請求項1】
第1サンプルが衝突する可能性のある地点を通過してしまうまで衝突する可能性のある地点の上流側の位置で一次コンベヤ上を移送されている第2サンプルを停止させることによって、一次コンベヤが第2のサンプルを移送しつつあるときに衝突する可能性のある地点のところで移動している二次コンベヤ上にある第1のサンプルを移動している一次コンベヤ上へ移す方法であって、第2サンプルを停止させるか、または、減速させるために、一次コンベヤに沿った、衝突する可能性のある地点の上流側の位置にサンプルを受け入れるようになっている回転可能なプロペラ形の回転木戸を設け、一次コンベヤ上にある第2サンプルを回転可能な回転木戸と係合させ、二次コンベヤ上の移動している第1のサンプルが衝突する可能性のある地点に接近するときはいつでも回転可能な回転木戸を停止させる上記方法。
【請求項2】
プロペラ形の回転木戸が、円形プレートの中心軸線まわりに対称的に配置された2対の半径方向に延びるブレードを含む、請求項1記載の方法。
【請求項3】
プロペラ形の回転木戸が、一次コンベヤの近くに回転自在に装着した複数のブレードを含む、請求項1記載の方法。
【請求項4】
第1サンプルが衝突する可能性のある地点を通過してしまうまで衝突する可能性のある地点の上流側の位置で一次コンベヤ上を移送されている第2サンプルを減速させることによって、一次コンベヤが第2のサンプルを移送しつつあるときに衝突する可能性のある地点のところで移動している二次コンベヤ上にある第1のサンプルを移動している一次コンベヤ上へ移す方法であって、第2サンプルを減速させるために、一次コンベヤに沿った、衝突する可能性のある地点の上流側の位置にサンプルを受け入れるようになっている回転可能なプロペラ形の回転木戸を設け、一次コンベヤ上にある第2サンプルを回転可能な回転木戸と係合させ、二次コンベヤ上の移動している第1のサンプルが衝突する可能性のある地点に接近するときはいつでも回転可能な回転木戸を部分的に阻止することを含む方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公表番号】特表2010−500575(P2010−500575A)
【公表日】平成22年1月7日(2010.1.7)
【国際特許分類】
【出願番号】特願2009−523939(P2009−523939)
【出願日】平成19年8月7日(2007.8.7)
【国際出願番号】PCT/US2007/075314
【国際公開番号】WO2008/021803
【国際公開日】平成20年2月21日(2008.2.21)
【出願人】(508147326)シーメンス・ヘルスケア・ダイアグノスティックス・インコーポレイテッド (23)
【Fターム(参考)】
【公表日】平成22年1月7日(2010.1.7)
【国際特許分類】
【出願日】平成19年8月7日(2007.8.7)
【国際出願番号】PCT/US2007/075314
【国際公開番号】WO2008/021803
【国際公開日】平成20年2月21日(2008.2.21)
【出願人】(508147326)シーメンス・ヘルスケア・ダイアグノスティックス・インコーポレイテッド (23)
【Fターム(参考)】
[ Back to top ]