
自動水栓
【課題】 湯を吐水している時や、浴槽等の湯を使う設備から発生する湯気を、物体検知センサが検知して、予期せぬ誤動作をすることのない自動水栓を提供する。
【解決手段】 給水経路から給水された湯水を吐出する吐水口と、前記給水経路に接続された電磁弁と、伝播波を送信し、その反射量を検出するセンサと、前記伝播波の反射量が第1の閾値以上であると吐水開始であると判断し、この第1の閾値より小さな第2の閾値未満になると吐水終了であると判断する制御部と、前記制御部の判断出力に基づいて、前記電磁弁を駆動する電磁弁駆動手段と、を備えた自動水栓において、前記制御部は、前記伝播波の反射量が前記第1の閾値を超えて吐水中である時に、前記伝播波の反射量が前記第2の閾値以上であっても、前記伝播波の反射量が湯気の影響による反射量であると判断した場合は吐水終了と判断する。
【解決手段】 給水経路から給水された湯水を吐出する吐水口と、前記給水経路に接続された電磁弁と、伝播波を送信し、その反射量を検出するセンサと、前記伝播波の反射量が第1の閾値以上であると吐水開始であると判断し、この第1の閾値より小さな第2の閾値未満になると吐水終了であると判断する制御部と、前記制御部の判断出力に基づいて、前記電磁弁を駆動する電磁弁駆動手段と、を備えた自動水栓において、前記制御部は、前記伝播波の反射量が前記第1の閾値を超えて吐水中である時に、前記伝播波の反射量が前記第2の閾値以上であっても、前記伝播波の反射量が湯気の影響による反射量であると判断した場合は吐水終了と判断する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の様態は、一般的に検知センサを備えた自動水栓に関し、具体的には検知センサの検知状況に応じて吐水および止水を自動的に行う自動水栓に関する発明である。
【背景技術】
【0002】
手などの被検知物体をセンサが検出して、自動で吐水する自動水栓が従来から知られている。
センサの検出方向と吐水方向は、使用者の使い勝手の点から、同一方向になっていることが好ましく、結果としてセンサの検出方向は洗面器に向いていることが望ましい。
そこで、センサの検出方向を洗面器に向けた自動水栓制御装置として特許文献1が公知となっている。
【0003】
特許文献1記載の自動水栓制御装置では、投光する赤外光と受光する赤外光とを偏光させて、洗面器からの鏡面反射光は検出せず、人体からの拡散反射光のみを検出することを特徴としている。
こうすることで、洗面器の材質が赤外光を鏡面反射するようなものであっても誤検出することがないとしている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第3726953号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1記載の自動水栓制御装置では、湯を吐水する場合に以下のような課題があった。
吐水口から湯を吐水したときは、洗面器周辺に湯気が発生する。また、浴槽等の湯を使う設備が隣接されている場合は、吐水口から水を吐水しても洗面器周辺に湯気が発生することがある。湯気は水の粒子の集まりであるため、投光された赤外光は乱反射する。乱反射することによって、投光時に偏光されていた光は偏光成分を失ってしまう。そして、偏光成分を失った光を受光することで、センサが誤検知してしまい、誤吐水をする可能性があった。
なお、偏光板を使用しない場合でも湯気での乱反射による受光は発生するため、偏光板を使用しない自動水栓においても同様に抱えている課題である。
本発明は、上記課題を解決するためになされたもので、本発明の課題は、湯気が発生している際に、検知センサが湯気を検知して予期せぬ誤動作をすることのない自動水栓を提供することにある。
【課題を解決するための手段】
【0006】
上記目的を達成するために請求項1記載の発明によれば、給水経路から給水された湯水を吐出する吐水口と、前記給水経路に接続された電磁弁と、伝播波を送信し、その反射量を検出するセンサと、前記伝播波の反射量が第1の閾値以上であると吐水開始であると判断し、この第1の閾値より小さな第2の閾値未満になると吐水終了であると判断する制御部と、前記制御部の判断出力に基づいて、前記電磁弁を駆動する電磁弁駆動手段と、を備えた自動水栓において、前記制御部は、前記伝播波の反射量が前記第1の閾値を超えて吐水中である時に、前記伝播波の反射量が前記第2の閾値以上であっても、前記伝播波の反射量が湯気の影響による反射量であると判断した場合は吐水終了と判断することを特徴とする。
これにより、湯気が発生している状態であっても誤って吐水を継続することを防止することができる。
【0007】
また、請求項2記載の発明によれば、前記制御部は、前記第2の閾値よりも大きく、前記第1の閾値よりも小さな第3の閾値を設け、前記伝播波の反射量が前記第2の閾値以上であって前記第3の閾値未満であることが一定時間継続した時、吐水終了であると判断することを特徴とする。
これにより、湯気が発生し前記伝播波の反射量が高い状態であっても、吐水終了の判断閾値が高く設定されているので、湯気により吐水が継続することがなくなる。
【0008】
また、請求項3記載の発明によれば、前記制御部は、前記伝播波の反射量の変化量が第1変化量以上である時は、前記第3の閾値によって吐水終了であると判断することを停止することを特徴とする。
これにより、前記伝播波の反射量が第3の閾値未満であっても、手洗い等の動きで吐水を継続することができるため、意図せぬ吐水終了で使用者に不快な思いをさせることがない。
【0009】
また、請求項4記載の発明によれば、前記制御部は、前記伝播波の反射量が湯気の影響による反射量であるため吐水終了と判断した後は、前記第1の閾値より大きな判断基準で吐水開始と判断することを特徴とする。
これにより、湯気により吐水終了と判断した後に、誤って湯気で吐水開始することを防ぐことができる。
【0010】
また、請求項5記載の発明によれば、前記制御部は、前記第3の閾値によって吐水終了と判断した時は、前記第1の閾値、及び前記第3の閾値よりも小さく、前記第2の閾値よりも大きな第5の閾値を設け、前記伝播波の反射量が第5の閾値未満であることが一定時間継続するまで、前記第1の閾値の値より大きな第6の閾値を設け、前記第6の閾値で吐水開始と判断することを特徴とする
これにより、湯気により吐水終了と判断した後に、誤って湯気で吐水開始することを防ぐことができる。
【0011】
また、請求項6記載の発明によれば、前記制御部は、前記第3の閾値によって吐水終了と判断した時は、前記伝播波の反射量の変化量が第2変化量以上である時に吐水開始であると判断することを特徴とする。
これにより、湯気により吐水終了と判断した後に、誤って湯気で吐水開始することを防ぐことができる。
【発明の効果】
【0012】
本発明によれば、自らが湯を吐水したことによって発生した湯気、他の設備から発生した湯気に関わらず、湯気が発生している時に、物体検知センサが湯気を検知して予期せぬ誤動作をすることのない自動水栓を提供することができる。
【図面の簡単な説明】
【0013】
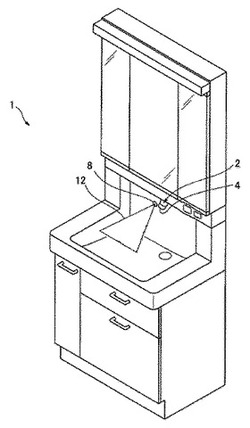
【図1】本発明の第1の実施形態にかかる自動水栓を例示する模式図である。
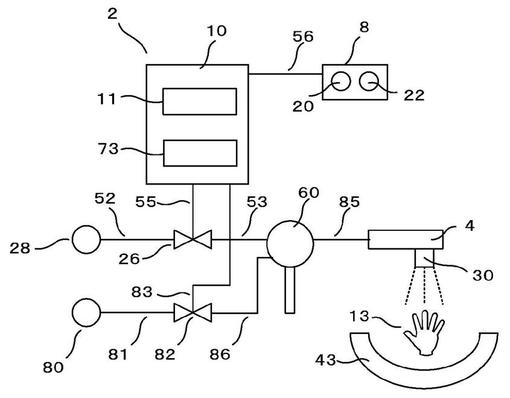
【図2】第1の実施形態にかかる自動水栓を例示するブロック図である。
【図3】物体検知センサが被検知物体を検知した時の一般的な波形である。
【図4】物体検知センサが被検知物体を検知した時に湯気が発生した時の波形である。
【図5】物体検知センサが被検知物体13を検知し、時間経過とともに被検知物体が物体検知センサの検知エリア遠方に移動した時の波形である。
【図6】物体検知センサが被検知物体を検知し、時間経過とともに被検知物体が物体検知センサ8検知エリア遠方に移動した時の波形である。
【図7】吐水状態における、第2の閾値、第3の閾値、第1変化量を用いた吐水終了判断フローチャートである。
【図8】第3の閾値で止水終了と判断した後の止水状態時の波形である。
【図9】第3の閾値で止水終了と判断した後の止水状態時の波形である。
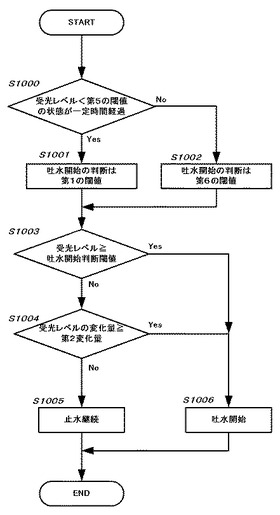
【図10】止水状態における、第1の閾値、第5の閾値、第6の閾値、第2変化量を用いた吐水開始判断フローチャートである。
【発明を実施するための形態】
【0014】
以下、本実施形態の具体例について図面を参照しつつ説明する。なお、各図面中、同様の構成要素には同一の符号を付して詳細な説明は適宜省略する。
(第1の実施形態)
ここからは第1の実施形態(止水終了判断)について説明する。
図1は本発明の第1の実施形態にかかる自動水栓を例示する模式図である。
図1に示すように、洗面台1に本発明の実施形態である自動水栓2が設置されている。自動水栓2には、水栓本体4の横に物体検知センサ8が配置されており、この物体検知センサ8により物体検知センサ8の検知エリア12内に在る手などの物体を検知して、水栓本体4からの湯水の吐水、止水を切り替えるように構成されている。
なお、本実施形態の自動水栓2は、洗面台1以外にも、例えばキッチンといった、吐水が必要な場所に設置することができる。
【0015】
図2は第1の実施形態にかかる自動水栓を例示するブロック図である。
図2に示すように、自動水栓2は、給水源28と、給湯源80と、水栓本体4と、物体検知センサ8と、水側電磁弁26と、湯側電磁弁82と、制御部10とを有している。制御部10には、電磁弁駆動手段73、メモリ11を有しており、後述する第1の閾値、第2の閾値、第3の閾値、第5の閾値、第6の閾値、第1変化量、第2変化量はこのメモリ11に格納されているものとする。
【0016】
給水源28からは水が供給されており、給水経路としての給水ホース52と給水ホース53に接続された水側電磁弁26を経由して、更にシングルレバー式湯水混合水栓60と給水ホース85を経由して水栓本体4の吐水口30から水が吐水される。
また、給湯源80からは湯が供給されており、給湯経路としての給水ホース81と給水ホース86に接続された湯側電磁弁82を経由して、更にシングルレバー式湯水混合水栓60と給水ホース85を経由して水栓本体4の吐水口30から湯が吐水される。
【0017】
水と湯はシングルレバー式湯水混合水栓60の内部で混合することができ、吐水口30からは、水のみの吐水、湯のみの吐水、湯と水を混合した吐水が可能となっている。
また、シングルレバーを操作することによって吐水量や湯水の混合割合を変更することができ、強制的に止水することもできる。
【0018】
物体検知センサ8は、送信部と受信部を備えており、本実施形態では、送信部を赤外の投光素子20、受信部を赤外の受光素子22から構成される反射式積分型センサとして説明する。つまり、投光素子20から発せられる伝播波は赤外の発光波であり、受光素子22が受信する反射波は赤外の反射光となる。
投光素子20は、ボウル部43に臨ませて設けられており、所定の投光量の光をボウル部43に向けて投光する。投光素子20から投光された光は、ボウル部43や使用者の手など被検知物体13によって反射され、この反射光を受光素子22が受光し、その受光レベルの大きさが配線56を通じて制御部10に送信される。
【0019】
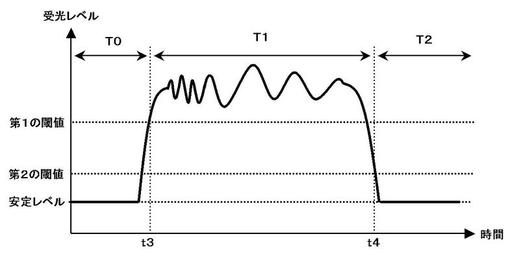
図3は物体検知センサ8が被検知物体13を検知した時の一般的な波形である。横軸が時間、縦軸が受光素子22が受け取った受光レベルである。
被検知物体13が存在しない時は、受光レベルは第2の閾値よりも低い安定レベル付近で安定している(止水状態)。被検知物体13が物体検知センサ8の検知エリア12に入ることで受光レベルが上がり、受光レベルが第1の閾値以上になった時点(タイミングt3)で制御部10は吐水開始であると判断し、その信号が電磁弁駆動手段73へと渡され、電磁弁駆動手段73は水側電磁弁26と湯側電磁弁82を開駆動して吐水動作開始となる。なお、制御部10は、洗面台1の下部に設けられており、物体検知センサ8と、水側電磁弁26と、湯側電磁弁82とは電気信号を伝送するそれぞれの配線56と、配線55と、配線83とによって接続されている。
そして、被検知物体13が存在しているT1の期間は手洗い動作等で受光レベルが大きくばらつくが(吐水状態継続)、被検知物体13が物体検知センサ8の検知エリア12から退くと受光レベルが安定レベルに戻る。受光レベルが第2の閾値未満になった時点(タイミングt4)で制御部10は吐水終了であると判断し、その信号が電磁弁駆動手段73へと渡され、磁弁駆動手段73は水側電磁弁26と湯側電磁弁82を閉駆動して吐水動作終了となる。つまりT0、T2の期間が止水状態、T1の期間が吐水状態となり、物体検知センサ8の検知エリア12での被検知物体13の存在状態と吐水状態が合致する。またノイズ等で受光レベルが変動した時のことを考慮して、第1の閾値は第2の閾値より高い値に設定するのが一般的である。
【0020】
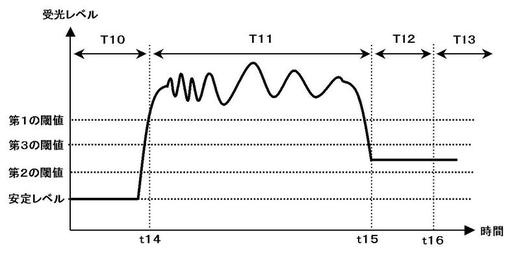
図4は物体検知センサ8が被検知物体13を検知した時に湯気が発生した時の波形である。横軸が時間、縦軸が受光素子22が受け取った受光レベルである。
T10の期間、吐水開始タイミング(タイミングt14)は図3で説明した動きと同一である。被検知物体13が存在しているT11の期間は手洗い動作等で受光レベルが大きくばらつく(吐水状態継続)。被検知物体13が物体検知センサ8の検知エリア12から退いても(タイミングt15)、湯気が発生している場合は投光された赤外光は乱反射し受光レベルが安定レベルにまで戻らない。この時、第2の閾値のみが設定されているだけであると、受光レベルが第2の閾値未満になるまで吐水を継続することになる(T12、T13期間は吐水状態)。しかし制御部10が、第3の閾値を別途設け、受光レベルが第3の閾値未満の状態が一定時間(T12期間)継続した時点で、被検知物体13は存在せず現在の受光レベルの状態は湯気の影響によるものなので吐水終了と判断することで、湯気が発生している状態であっても吐水を終了することができる。或いは、現在の受光レベルが第3の閾値より低い時、現在受光レベルと第3の閾値との差を積分していき、その値がある一定値に達したら吐水終了と判断しても良い。かかる処理によりT10、T13の期間が止水状態、T11、T12の期間が吐水状態となり、物体検知センサ8の検知エリア12での被検知物体13の存在状態と吐水状態が合致することができる。
【0021】
また第3の閾値は、第2の閾値より高く、第1の閾値よりも低い値とすることが好ましい。これは第3の閾値を第1の閾値よりも高い値に設定すると、前記制御部10が第3の閾値で止水終了と判断しても、その直後に第1の閾値で吐水開始と判断してしまい、第3の閾値を設けた意味が無くなるためである。
【0022】
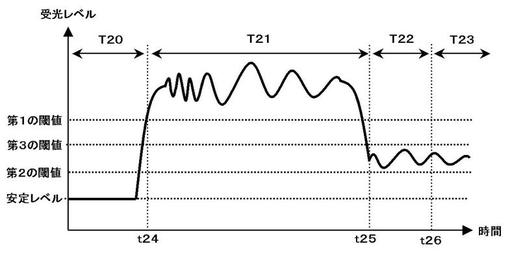
図5は物体検知センサ8が被検知物体13を検知し、時間経過とともに被検知物体13が物体検知センサ8の検知エリア12遠方に移動した時の波形である。横軸が時間、縦軸が受光素子22が受け取った受光レベルである。この時湯気の有無に関係無く、ほぼ同様の波形となる。
【0023】
T20の期間、吐水開始タイミング(タイミングt24)は図3で説明した動きと同一である。被検知物体13が存在しているT21の期間は手洗い動作等で受光レベルが大きくばらつく。被検知物体13が物体検知センサ8の検知エリア12の遠方に遠のいた時(タイミングt25)、受光レベルは第3の閾値未満となり、一定期間(T22期間)継続した時点で吐水終了と判断してしまうことになる。図4のT12期間のように湯気の場合は受光レベルの変化は小さいが、図5のT22期間のように被検知物体13が手である場合は信号の変化大きいため、この点に着目する。
【0024】
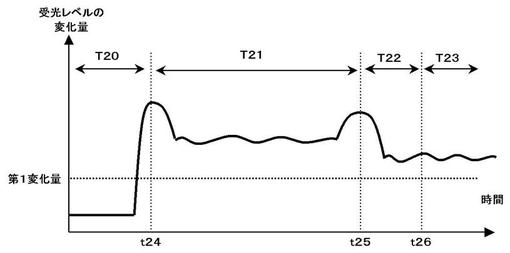
図6は物体検知センサ8が被検知物体13を検知し、時間経過とともに被検知物体13が物体検知センサ8の検知エリア12遠方に移動した時の波形である。横軸が時間、縦軸が受光素子22が受け取った受光レベルの変化量である。この時湯気の有無に関係無く、ほぼ同様の波形となる。
受光レベルの変化量は、ある一定期間の受光レベルのサンプリングデータで演算した、標準偏差や分散といった値で表すことができる。T20やt24といった記号は図5とリンクしているものとする。
【0025】
T20の期間は受光レベルが安定しているため、受光レベルの変化量も安定している。被検知物体13が物体検知センサ8の検知エリア12に入ることで受光レベルが上がるため、受光レベルの変化量も急峻に大きくなる(タイミングt24)。そして、被検知物体13が存在しているT21の期間は手洗い動作等で受光レベルがばらつくため、受光レベルの変化量もT20の期間より高い値が継続する。被検知物体13が物体検知センサ8の検知エリア12の遠方に遠のく時(タイミング25)、受光レベルが大きく変化するため、受光レベルの変化量も値が大きくなる。T22、T23の期間では、まだ被検知物体13が存在しているため、受光レベルも一定量の値を確保しつつ値がばらつく。よって受光レベルの変化量もT20期間より高い値が継続する。
【0026】
そこで前記制御部10が、T20期間の受光レベルの変化量よりも大きく、T22、T23期間の受光レベルの変化量よりも小さい第1変化量を設定し、受光レベルの変化量が第1変化量よりも大きい時は、前記第3の閾値未満の状態が一定時間経過することで吐水終了とする判断を停止することで、被検知物体13存在しているT22、T23の期間も吐水を継続することができる。受光レベルの変化量が第1変化量よりも小さくなっても、一定時間は第3の閾値を用いた吐水終了判断を停止するようディレイ時間を設けても良い。最終的に被検知物体13が、物体検知センサ8の検知エリア12から退けば、前記第2の閾値、或いは第3の閾値により、前記制御部10が吐水終了と判断する。
かかる処理によりT20の期間が止水状態、T21、T22、T23の期間が吐水状態となり、物体検知センサ8の検知エリア12での被検知物体13の存在状態と吐水状態が合致することができる。
【0027】
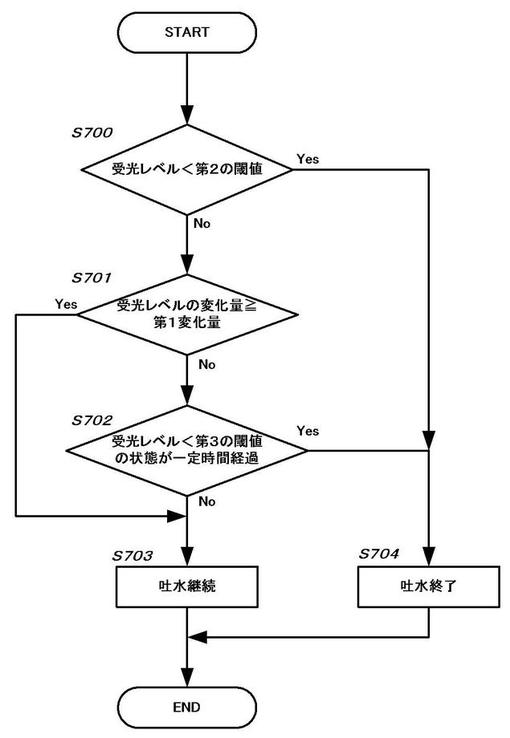
吐水状態における、第2の閾値、第3の閾値、第1変化量を用いた吐水終了判断をまとめると、図7のようなフローチャートになる。図7のフローチャートの流れを説明する。
受光レベルが第2の閾値より小さいかを判断する(S700)。受光レベルが第2の閾値より小さいければ(S700でYes)、湯気が発生しておらず、前記被検知物体13が物体検知センサ8の検知エリア12から退いたと判断して吐水終了となる(S704)。受光レベルが第2の閾値以上であれば(S700でNo)、受光レベルの変化量と第1変化量を比較する(S701)。受光レベルの変化量が第1変化量以上の時は(S701でYes)、前記被検知物体13が存在していると判断して吐水継続とする(S703)。受光レベルの変化量が第1変化量未満の時は(S701でNo)、受光レベルが第3の閾値より小さい状態が一定時間経過したかを比較する(S702)。受光レベルが第3の閾値より小さい状態が一定時間経過していれば(S702でYes)、記被検知物体13が存在しておらず、湯気で受光レベルが上がっていると判断して吐水終了とする(S704)。受光レベルが第3の閾値より小さい状態で一定時間経過していなければ(S702でNo)、まだ前記被検知物体13が存在していると判断し、吐水継続とする(S703)。
かかる処理により、たとえ湯気が発生していたとしても、物体検知センサ8の検知エリア12での被検知物体13の存在状態と吐水状態を合致することができる。
【0028】
(第2の実施形態)
ここからは、第2の実施形態(吐水開始判断)について説明する。第2の実施形態においても自動水栓を例示する模式図、自動水栓を例示するブロック図は、図1、図2と同一であるため、説明は省略する。
【0029】
図8は第3の閾値で止水終了と判断した後の止水状態時の波形である。横軸が時間、縦軸が受光素子22が受け取った受光レベルである。
T30の期間は湯気が発生している状態なので、受光レベルは湯気が発生していない時の安定レベルよりも高い状態で推移している。この時湯気の揺らぎ等で、受光レベルが吐水開始の条件である第1の閾値を超え、誤吐水をしてしまう恐れがある。そこで前記制御部10が、吐水開始の条件である第1の閾値よりも高い値である第6の閾値を別途設け、第6の閾値で一時的に吐水開始の判断をすることで、前記誤吐水を防ぐことができる。しかし、第6の閾値で吐水開始の判断を継続すると、物体検知センサ8の検知エリア12が狭くなり使用者の使い勝手が悪化する。そこで前記制御部10は第1の閾値、及び第3の閾値よりも低い値である第5の閾値を別途設ける。
【0030】
通常、止水状態であれば時間経過とともに湯気が消滅するため、受光レベルは安定レベルに向かって減少する(T30期間)。この時受光レベルが第5の閾値未満の状態が一定期間(T31期間)継続することで湯気が消滅したと判断し、第6の閾値で判断していた吐水開始の判断を、第1の閾値で判断させるようにする(タイミングt35で吐水開始判断閾値が第1の閾値に戻る)。タイミングt35以降に受光レベルが第1の閾値を超えた時(タイミングt36)、吐水状態となる。
【0031】
かかる処理により、使い勝手を悪化させることなく、湯気による誤吐水を防ぐことができる。つまり、T30、T31の期間は止水状態で、吐水開始判断の閾値が第6の閾値となっている状態。T32の期間は止水状態で、吐水開始判断の閾値が第1の閾値。T33の期間は吐水状態で、吐水開始判断の閾値が第1閾値となる。誤吐水防止と使い勝手を両立されるのであれば、第5の閾値は安定レベルより高く、第1の閾値、及び第3の閾値より低い値に設定するのが好ましいが、誤吐水防止に重点を置くのであれば、第5の閾値は0、T31期間を無限とし、実質、受光レベルが第6の閾値を超えるまでは(一度吐水開始と判断するまでは)、吐水開始判断の閾値を第6の閾値と固定とするようにしても良い。
【0032】
また、湯気消滅の判断(吐水開始の閾値を第1の閾値にするか、第6の閾値にするかの判断)は、現在の受光レベルが第5の閾値未満の時、現在受光レベルと第5の閾値との差を積分していき、その値がある一定値に達したらとしても良い。
【0033】
図9は第3の閾値で止水終了と判断した後の止水状態時の波形である。横軸が時間、縦軸が受光素子22が受け取った受光レベルの変化量である。受光レベルの変化量は、ある一定期間の受光レベルのサンプリングデータで演算した、標準偏差や分散といった値で表すことができる。T30やt34といった記号は図8とリンクしているものとする。
【0034】
T30、T31の期間は湯気が発生している状態であるが、徐々にそのレベルが下がっている状態である。よって、受光レベルの変化量は、低い値でほぼ一定の値を示す。続いてT32の期間で前記被検知物体13が物体検知センサ8の検知エリア12内に入って来ることで受光レベル上がり、それに伴い受光レベルの変化量も急峻に上がる。T33の期間では手洗い動作をしているため、受光レベルの変化量は有る程度高い値で推移する。
【0035】
そこで前記制御部10は第2変化量を設け、受光レベルの変化量が第2変化量を超えた時点で吐水開始と判断することで、湯気と前記被検知物体13の存在を区別し、湯気での誤吐水を防止することができる。第2変化量は、湯気のゆらぎによる受光レベルの変化量よりも大きく、前記被検知物体13が物体検知センサ8の検知エリア12内に入って来ることによる受光レベルの変化量よりも小さい値にすることが望ましい。因みに受光レベルの変化量は、前記被検知物体13が物体検知センサ8の検知エリア12外に出た時も大きな値を示すことになるので、第2変化量による判断を行う前に、受光レベルが前記被検知物体13が物体検知センサ8の検知エリア12内に在ると判断できる程度の値を示している、という条件を追加しても良い。
【0036】
また、前述した各実施の形態が備える各要素は、技術的に可能な限りにおいて組み合わせることができ、これらを組み合わせたものも本発明の特徴を含む限り本発明の範囲に包含される。
例えば図8で説明したように、受光レベルが第5の閾値未満の状態が一定期間継続するまで、吐水開始判断の閾値を第6の閾値に設定するということは、一時的ではあるが物体検知センサ8の検知エリア12が狭まるということなる。一方、図9で説明したように受光レベルの変化量を確認する方法では、前記被検知物体13が前記物体検知センサ8の検知エリア12内へゆっくりと近づいて来た場合は、受光レベルの変化量が第2変化量を超えず、吐水開始と判断されない恐れがある。
【0037】
しかし、これら二つを組み合わせると、前記被検知物体13が物体検知センサ8の検知エリア12の遠方に存在した場合は、第2変化量で吐水開始と判断することができ、記被検知物体13がゆっくりと近づいて来た場合は第1の閾値、或いは第6の閾値により吐水開始と判断することできるため、使い勝手を全く悪化させることなく、湯気によって吐水開始と判断することを防止することができる。
【0038】
また、第1の実施形態では、第3の閾値は第1の閾値より高く設定することができなかったが、第2の実施形態を用いることで、第3の閾値を第1の閾値より高く設定しても、誤って吐水と判断しないようにすることができる。
【0039】
前記第3の閾値で吐水終了と判断した後の止水状態における、第1の閾値、第5の閾値、第6の閾値、第2変化量を用いた吐水開始判断をまとめると、図10のようなフローチャートになる。図10のフローチャートの流れを説明する。
【0040】
受光レベルが第5の閾値より小さい状態が一定時間経過したかを比較する(S1000)。受光レベルが第5の閾値より小さい状態が一定時間経過していれば(S1000でYes)、湯気の影響は無いと判断し、吐水開始判断の閾値を第1の閾値とする(S1001)。受光レベルが第5の閾値より小さい状態が一定時間経過していなければ(S1000でNo)、まだ湯気の影響が懸念されるため、吐水開始判断の閾値を第6の閾値とする(S1002)。
【0041】
続いて受光レベルと吐水開始判断の閾値とを比較する(S1003)。この時、吐水開始判断の閾値には、第1の閾値、或いは第6の閾値が設定されていることになる。受光レベルが吐水開始判断の閾値以上であれば(S1003でYes)、前記被検知物体13が前記物体検知センサ8の検知エリア12に存在する(近い距離に在る)と判断し吐水開始(S1006)と判断する。受光レベルが吐水開始判断の閾値未満であれば(S1003でNo)、次の処理(S1004)へ進む。
【0042】
続いて受光レベルの変化量と第2変化量とを比較する(S1004)。受光レベルの変化量が第2変化量以上であれば(S1004でYes)、前記被検知物体13が前記物体検知センサ8の検知エリア12内に移動して来たと判断し、吐水開始(S1006)と判断する。受光レベルの変化量が第2変化量未満であれば(S1004でNo)、止水継続(S1005)と判断する。
【0043】
かかる処理により、たとえ湯気が発生していたとしても、使い勝手を悪化させることなく、湯気により誤って吐水開始と判断することを防止することができる。
【符号の説明】
【0044】
1…洗面台
2…自動水栓
4…水栓本体
8…物体検知センサ
10…制御部
11…メモリ
12…物体検知センサ8の検知エリア
13…被検知物体
20…投光素子(送信部)
22…受光素子(受信部)
26…水側電磁弁
28…給水源
30…吐水口
43…ボウル部
52…給水ホース
53…給水ホース
55…配線
56…配線
60…シングルレバー式湯水混合水栓
73…電磁弁駆動手段
80…給湯源
81…給水ホース
82…湯側電磁弁
83…配線
85…給水ホース
86…給水ホース
【技術分野】
【0001】
本発明の様態は、一般的に検知センサを備えた自動水栓に関し、具体的には検知センサの検知状況に応じて吐水および止水を自動的に行う自動水栓に関する発明である。
【背景技術】
【0002】
手などの被検知物体をセンサが検出して、自動で吐水する自動水栓が従来から知られている。
センサの検出方向と吐水方向は、使用者の使い勝手の点から、同一方向になっていることが好ましく、結果としてセンサの検出方向は洗面器に向いていることが望ましい。
そこで、センサの検出方向を洗面器に向けた自動水栓制御装置として特許文献1が公知となっている。
【0003】
特許文献1記載の自動水栓制御装置では、投光する赤外光と受光する赤外光とを偏光させて、洗面器からの鏡面反射光は検出せず、人体からの拡散反射光のみを検出することを特徴としている。
こうすることで、洗面器の材質が赤外光を鏡面反射するようなものであっても誤検出することがないとしている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第3726953号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1記載の自動水栓制御装置では、湯を吐水する場合に以下のような課題があった。
吐水口から湯を吐水したときは、洗面器周辺に湯気が発生する。また、浴槽等の湯を使う設備が隣接されている場合は、吐水口から水を吐水しても洗面器周辺に湯気が発生することがある。湯気は水の粒子の集まりであるため、投光された赤外光は乱反射する。乱反射することによって、投光時に偏光されていた光は偏光成分を失ってしまう。そして、偏光成分を失った光を受光することで、センサが誤検知してしまい、誤吐水をする可能性があった。
なお、偏光板を使用しない場合でも湯気での乱反射による受光は発生するため、偏光板を使用しない自動水栓においても同様に抱えている課題である。
本発明は、上記課題を解決するためになされたもので、本発明の課題は、湯気が発生している際に、検知センサが湯気を検知して予期せぬ誤動作をすることのない自動水栓を提供することにある。
【課題を解決するための手段】
【0006】
上記目的を達成するために請求項1記載の発明によれば、給水経路から給水された湯水を吐出する吐水口と、前記給水経路に接続された電磁弁と、伝播波を送信し、その反射量を検出するセンサと、前記伝播波の反射量が第1の閾値以上であると吐水開始であると判断し、この第1の閾値より小さな第2の閾値未満になると吐水終了であると判断する制御部と、前記制御部の判断出力に基づいて、前記電磁弁を駆動する電磁弁駆動手段と、を備えた自動水栓において、前記制御部は、前記伝播波の反射量が前記第1の閾値を超えて吐水中である時に、前記伝播波の反射量が前記第2の閾値以上であっても、前記伝播波の反射量が湯気の影響による反射量であると判断した場合は吐水終了と判断することを特徴とする。
これにより、湯気が発生している状態であっても誤って吐水を継続することを防止することができる。
【0007】
また、請求項2記載の発明によれば、前記制御部は、前記第2の閾値よりも大きく、前記第1の閾値よりも小さな第3の閾値を設け、前記伝播波の反射量が前記第2の閾値以上であって前記第3の閾値未満であることが一定時間継続した時、吐水終了であると判断することを特徴とする。
これにより、湯気が発生し前記伝播波の反射量が高い状態であっても、吐水終了の判断閾値が高く設定されているので、湯気により吐水が継続することがなくなる。
【0008】
また、請求項3記載の発明によれば、前記制御部は、前記伝播波の反射量の変化量が第1変化量以上である時は、前記第3の閾値によって吐水終了であると判断することを停止することを特徴とする。
これにより、前記伝播波の反射量が第3の閾値未満であっても、手洗い等の動きで吐水を継続することができるため、意図せぬ吐水終了で使用者に不快な思いをさせることがない。
【0009】
また、請求項4記載の発明によれば、前記制御部は、前記伝播波の反射量が湯気の影響による反射量であるため吐水終了と判断した後は、前記第1の閾値より大きな判断基準で吐水開始と判断することを特徴とする。
これにより、湯気により吐水終了と判断した後に、誤って湯気で吐水開始することを防ぐことができる。
【0010】
また、請求項5記載の発明によれば、前記制御部は、前記第3の閾値によって吐水終了と判断した時は、前記第1の閾値、及び前記第3の閾値よりも小さく、前記第2の閾値よりも大きな第5の閾値を設け、前記伝播波の反射量が第5の閾値未満であることが一定時間継続するまで、前記第1の閾値の値より大きな第6の閾値を設け、前記第6の閾値で吐水開始と判断することを特徴とする
これにより、湯気により吐水終了と判断した後に、誤って湯気で吐水開始することを防ぐことができる。
【0011】
また、請求項6記載の発明によれば、前記制御部は、前記第3の閾値によって吐水終了と判断した時は、前記伝播波の反射量の変化量が第2変化量以上である時に吐水開始であると判断することを特徴とする。
これにより、湯気により吐水終了と判断した後に、誤って湯気で吐水開始することを防ぐことができる。
【発明の効果】
【0012】
本発明によれば、自らが湯を吐水したことによって発生した湯気、他の設備から発生した湯気に関わらず、湯気が発生している時に、物体検知センサが湯気を検知して予期せぬ誤動作をすることのない自動水栓を提供することができる。
【図面の簡単な説明】
【0013】
【図1】本発明の第1の実施形態にかかる自動水栓を例示する模式図である。
【図2】第1の実施形態にかかる自動水栓を例示するブロック図である。
【図3】物体検知センサが被検知物体を検知した時の一般的な波形である。
【図4】物体検知センサが被検知物体を検知した時に湯気が発生した時の波形である。
【図5】物体検知センサが被検知物体13を検知し、時間経過とともに被検知物体が物体検知センサの検知エリア遠方に移動した時の波形である。
【図6】物体検知センサが被検知物体を検知し、時間経過とともに被検知物体が物体検知センサ8検知エリア遠方に移動した時の波形である。
【図7】吐水状態における、第2の閾値、第3の閾値、第1変化量を用いた吐水終了判断フローチャートである。
【図8】第3の閾値で止水終了と判断した後の止水状態時の波形である。
【図9】第3の閾値で止水終了と判断した後の止水状態時の波形である。
【図10】止水状態における、第1の閾値、第5の閾値、第6の閾値、第2変化量を用いた吐水開始判断フローチャートである。
【発明を実施するための形態】
【0014】
以下、本実施形態の具体例について図面を参照しつつ説明する。なお、各図面中、同様の構成要素には同一の符号を付して詳細な説明は適宜省略する。
(第1の実施形態)
ここからは第1の実施形態(止水終了判断)について説明する。
図1は本発明の第1の実施形態にかかる自動水栓を例示する模式図である。
図1に示すように、洗面台1に本発明の実施形態である自動水栓2が設置されている。自動水栓2には、水栓本体4の横に物体検知センサ8が配置されており、この物体検知センサ8により物体検知センサ8の検知エリア12内に在る手などの物体を検知して、水栓本体4からの湯水の吐水、止水を切り替えるように構成されている。
なお、本実施形態の自動水栓2は、洗面台1以外にも、例えばキッチンといった、吐水が必要な場所に設置することができる。
【0015】
図2は第1の実施形態にかかる自動水栓を例示するブロック図である。
図2に示すように、自動水栓2は、給水源28と、給湯源80と、水栓本体4と、物体検知センサ8と、水側電磁弁26と、湯側電磁弁82と、制御部10とを有している。制御部10には、電磁弁駆動手段73、メモリ11を有しており、後述する第1の閾値、第2の閾値、第3の閾値、第5の閾値、第6の閾値、第1変化量、第2変化量はこのメモリ11に格納されているものとする。
【0016】
給水源28からは水が供給されており、給水経路としての給水ホース52と給水ホース53に接続された水側電磁弁26を経由して、更にシングルレバー式湯水混合水栓60と給水ホース85を経由して水栓本体4の吐水口30から水が吐水される。
また、給湯源80からは湯が供給されており、給湯経路としての給水ホース81と給水ホース86に接続された湯側電磁弁82を経由して、更にシングルレバー式湯水混合水栓60と給水ホース85を経由して水栓本体4の吐水口30から湯が吐水される。
【0017】
水と湯はシングルレバー式湯水混合水栓60の内部で混合することができ、吐水口30からは、水のみの吐水、湯のみの吐水、湯と水を混合した吐水が可能となっている。
また、シングルレバーを操作することによって吐水量や湯水の混合割合を変更することができ、強制的に止水することもできる。
【0018】
物体検知センサ8は、送信部と受信部を備えており、本実施形態では、送信部を赤外の投光素子20、受信部を赤外の受光素子22から構成される反射式積分型センサとして説明する。つまり、投光素子20から発せられる伝播波は赤外の発光波であり、受光素子22が受信する反射波は赤外の反射光となる。
投光素子20は、ボウル部43に臨ませて設けられており、所定の投光量の光をボウル部43に向けて投光する。投光素子20から投光された光は、ボウル部43や使用者の手など被検知物体13によって反射され、この反射光を受光素子22が受光し、その受光レベルの大きさが配線56を通じて制御部10に送信される。
【0019】
図3は物体検知センサ8が被検知物体13を検知した時の一般的な波形である。横軸が時間、縦軸が受光素子22が受け取った受光レベルである。
被検知物体13が存在しない時は、受光レベルは第2の閾値よりも低い安定レベル付近で安定している(止水状態)。被検知物体13が物体検知センサ8の検知エリア12に入ることで受光レベルが上がり、受光レベルが第1の閾値以上になった時点(タイミングt3)で制御部10は吐水開始であると判断し、その信号が電磁弁駆動手段73へと渡され、電磁弁駆動手段73は水側電磁弁26と湯側電磁弁82を開駆動して吐水動作開始となる。なお、制御部10は、洗面台1の下部に設けられており、物体検知センサ8と、水側電磁弁26と、湯側電磁弁82とは電気信号を伝送するそれぞれの配線56と、配線55と、配線83とによって接続されている。
そして、被検知物体13が存在しているT1の期間は手洗い動作等で受光レベルが大きくばらつくが(吐水状態継続)、被検知物体13が物体検知センサ8の検知エリア12から退くと受光レベルが安定レベルに戻る。受光レベルが第2の閾値未満になった時点(タイミングt4)で制御部10は吐水終了であると判断し、その信号が電磁弁駆動手段73へと渡され、磁弁駆動手段73は水側電磁弁26と湯側電磁弁82を閉駆動して吐水動作終了となる。つまりT0、T2の期間が止水状態、T1の期間が吐水状態となり、物体検知センサ8の検知エリア12での被検知物体13の存在状態と吐水状態が合致する。またノイズ等で受光レベルが変動した時のことを考慮して、第1の閾値は第2の閾値より高い値に設定するのが一般的である。
【0020】
図4は物体検知センサ8が被検知物体13を検知した時に湯気が発生した時の波形である。横軸が時間、縦軸が受光素子22が受け取った受光レベルである。
T10の期間、吐水開始タイミング(タイミングt14)は図3で説明した動きと同一である。被検知物体13が存在しているT11の期間は手洗い動作等で受光レベルが大きくばらつく(吐水状態継続)。被検知物体13が物体検知センサ8の検知エリア12から退いても(タイミングt15)、湯気が発生している場合は投光された赤外光は乱反射し受光レベルが安定レベルにまで戻らない。この時、第2の閾値のみが設定されているだけであると、受光レベルが第2の閾値未満になるまで吐水を継続することになる(T12、T13期間は吐水状態)。しかし制御部10が、第3の閾値を別途設け、受光レベルが第3の閾値未満の状態が一定時間(T12期間)継続した時点で、被検知物体13は存在せず現在の受光レベルの状態は湯気の影響によるものなので吐水終了と判断することで、湯気が発生している状態であっても吐水を終了することができる。或いは、現在の受光レベルが第3の閾値より低い時、現在受光レベルと第3の閾値との差を積分していき、その値がある一定値に達したら吐水終了と判断しても良い。かかる処理によりT10、T13の期間が止水状態、T11、T12の期間が吐水状態となり、物体検知センサ8の検知エリア12での被検知物体13の存在状態と吐水状態が合致することができる。
【0021】
また第3の閾値は、第2の閾値より高く、第1の閾値よりも低い値とすることが好ましい。これは第3の閾値を第1の閾値よりも高い値に設定すると、前記制御部10が第3の閾値で止水終了と判断しても、その直後に第1の閾値で吐水開始と判断してしまい、第3の閾値を設けた意味が無くなるためである。
【0022】
図5は物体検知センサ8が被検知物体13を検知し、時間経過とともに被検知物体13が物体検知センサ8の検知エリア12遠方に移動した時の波形である。横軸が時間、縦軸が受光素子22が受け取った受光レベルである。この時湯気の有無に関係無く、ほぼ同様の波形となる。
【0023】
T20の期間、吐水開始タイミング(タイミングt24)は図3で説明した動きと同一である。被検知物体13が存在しているT21の期間は手洗い動作等で受光レベルが大きくばらつく。被検知物体13が物体検知センサ8の検知エリア12の遠方に遠のいた時(タイミングt25)、受光レベルは第3の閾値未満となり、一定期間(T22期間)継続した時点で吐水終了と判断してしまうことになる。図4のT12期間のように湯気の場合は受光レベルの変化は小さいが、図5のT22期間のように被検知物体13が手である場合は信号の変化大きいため、この点に着目する。
【0024】
図6は物体検知センサ8が被検知物体13を検知し、時間経過とともに被検知物体13が物体検知センサ8の検知エリア12遠方に移動した時の波形である。横軸が時間、縦軸が受光素子22が受け取った受光レベルの変化量である。この時湯気の有無に関係無く、ほぼ同様の波形となる。
受光レベルの変化量は、ある一定期間の受光レベルのサンプリングデータで演算した、標準偏差や分散といった値で表すことができる。T20やt24といった記号は図5とリンクしているものとする。
【0025】
T20の期間は受光レベルが安定しているため、受光レベルの変化量も安定している。被検知物体13が物体検知センサ8の検知エリア12に入ることで受光レベルが上がるため、受光レベルの変化量も急峻に大きくなる(タイミングt24)。そして、被検知物体13が存在しているT21の期間は手洗い動作等で受光レベルがばらつくため、受光レベルの変化量もT20の期間より高い値が継続する。被検知物体13が物体検知センサ8の検知エリア12の遠方に遠のく時(タイミング25)、受光レベルが大きく変化するため、受光レベルの変化量も値が大きくなる。T22、T23の期間では、まだ被検知物体13が存在しているため、受光レベルも一定量の値を確保しつつ値がばらつく。よって受光レベルの変化量もT20期間より高い値が継続する。
【0026】
そこで前記制御部10が、T20期間の受光レベルの変化量よりも大きく、T22、T23期間の受光レベルの変化量よりも小さい第1変化量を設定し、受光レベルの変化量が第1変化量よりも大きい時は、前記第3の閾値未満の状態が一定時間経過することで吐水終了とする判断を停止することで、被検知物体13存在しているT22、T23の期間も吐水を継続することができる。受光レベルの変化量が第1変化量よりも小さくなっても、一定時間は第3の閾値を用いた吐水終了判断を停止するようディレイ時間を設けても良い。最終的に被検知物体13が、物体検知センサ8の検知エリア12から退けば、前記第2の閾値、或いは第3の閾値により、前記制御部10が吐水終了と判断する。
かかる処理によりT20の期間が止水状態、T21、T22、T23の期間が吐水状態となり、物体検知センサ8の検知エリア12での被検知物体13の存在状態と吐水状態が合致することができる。
【0027】
吐水状態における、第2の閾値、第3の閾値、第1変化量を用いた吐水終了判断をまとめると、図7のようなフローチャートになる。図7のフローチャートの流れを説明する。
受光レベルが第2の閾値より小さいかを判断する(S700)。受光レベルが第2の閾値より小さいければ(S700でYes)、湯気が発生しておらず、前記被検知物体13が物体検知センサ8の検知エリア12から退いたと判断して吐水終了となる(S704)。受光レベルが第2の閾値以上であれば(S700でNo)、受光レベルの変化量と第1変化量を比較する(S701)。受光レベルの変化量が第1変化量以上の時は(S701でYes)、前記被検知物体13が存在していると判断して吐水継続とする(S703)。受光レベルの変化量が第1変化量未満の時は(S701でNo)、受光レベルが第3の閾値より小さい状態が一定時間経過したかを比較する(S702)。受光レベルが第3の閾値より小さい状態が一定時間経過していれば(S702でYes)、記被検知物体13が存在しておらず、湯気で受光レベルが上がっていると判断して吐水終了とする(S704)。受光レベルが第3の閾値より小さい状態で一定時間経過していなければ(S702でNo)、まだ前記被検知物体13が存在していると判断し、吐水継続とする(S703)。
かかる処理により、たとえ湯気が発生していたとしても、物体検知センサ8の検知エリア12での被検知物体13の存在状態と吐水状態を合致することができる。
【0028】
(第2の実施形態)
ここからは、第2の実施形態(吐水開始判断)について説明する。第2の実施形態においても自動水栓を例示する模式図、自動水栓を例示するブロック図は、図1、図2と同一であるため、説明は省略する。
【0029】
図8は第3の閾値で止水終了と判断した後の止水状態時の波形である。横軸が時間、縦軸が受光素子22が受け取った受光レベルである。
T30の期間は湯気が発生している状態なので、受光レベルは湯気が発生していない時の安定レベルよりも高い状態で推移している。この時湯気の揺らぎ等で、受光レベルが吐水開始の条件である第1の閾値を超え、誤吐水をしてしまう恐れがある。そこで前記制御部10が、吐水開始の条件である第1の閾値よりも高い値である第6の閾値を別途設け、第6の閾値で一時的に吐水開始の判断をすることで、前記誤吐水を防ぐことができる。しかし、第6の閾値で吐水開始の判断を継続すると、物体検知センサ8の検知エリア12が狭くなり使用者の使い勝手が悪化する。そこで前記制御部10は第1の閾値、及び第3の閾値よりも低い値である第5の閾値を別途設ける。
【0030】
通常、止水状態であれば時間経過とともに湯気が消滅するため、受光レベルは安定レベルに向かって減少する(T30期間)。この時受光レベルが第5の閾値未満の状態が一定期間(T31期間)継続することで湯気が消滅したと判断し、第6の閾値で判断していた吐水開始の判断を、第1の閾値で判断させるようにする(タイミングt35で吐水開始判断閾値が第1の閾値に戻る)。タイミングt35以降に受光レベルが第1の閾値を超えた時(タイミングt36)、吐水状態となる。
【0031】
かかる処理により、使い勝手を悪化させることなく、湯気による誤吐水を防ぐことができる。つまり、T30、T31の期間は止水状態で、吐水開始判断の閾値が第6の閾値となっている状態。T32の期間は止水状態で、吐水開始判断の閾値が第1の閾値。T33の期間は吐水状態で、吐水開始判断の閾値が第1閾値となる。誤吐水防止と使い勝手を両立されるのであれば、第5の閾値は安定レベルより高く、第1の閾値、及び第3の閾値より低い値に設定するのが好ましいが、誤吐水防止に重点を置くのであれば、第5の閾値は0、T31期間を無限とし、実質、受光レベルが第6の閾値を超えるまでは(一度吐水開始と判断するまでは)、吐水開始判断の閾値を第6の閾値と固定とするようにしても良い。
【0032】
また、湯気消滅の判断(吐水開始の閾値を第1の閾値にするか、第6の閾値にするかの判断)は、現在の受光レベルが第5の閾値未満の時、現在受光レベルと第5の閾値との差を積分していき、その値がある一定値に達したらとしても良い。
【0033】
図9は第3の閾値で止水終了と判断した後の止水状態時の波形である。横軸が時間、縦軸が受光素子22が受け取った受光レベルの変化量である。受光レベルの変化量は、ある一定期間の受光レベルのサンプリングデータで演算した、標準偏差や分散といった値で表すことができる。T30やt34といった記号は図8とリンクしているものとする。
【0034】
T30、T31の期間は湯気が発生している状態であるが、徐々にそのレベルが下がっている状態である。よって、受光レベルの変化量は、低い値でほぼ一定の値を示す。続いてT32の期間で前記被検知物体13が物体検知センサ8の検知エリア12内に入って来ることで受光レベル上がり、それに伴い受光レベルの変化量も急峻に上がる。T33の期間では手洗い動作をしているため、受光レベルの変化量は有る程度高い値で推移する。
【0035】
そこで前記制御部10は第2変化量を設け、受光レベルの変化量が第2変化量を超えた時点で吐水開始と判断することで、湯気と前記被検知物体13の存在を区別し、湯気での誤吐水を防止することができる。第2変化量は、湯気のゆらぎによる受光レベルの変化量よりも大きく、前記被検知物体13が物体検知センサ8の検知エリア12内に入って来ることによる受光レベルの変化量よりも小さい値にすることが望ましい。因みに受光レベルの変化量は、前記被検知物体13が物体検知センサ8の検知エリア12外に出た時も大きな値を示すことになるので、第2変化量による判断を行う前に、受光レベルが前記被検知物体13が物体検知センサ8の検知エリア12内に在ると判断できる程度の値を示している、という条件を追加しても良い。
【0036】
また、前述した各実施の形態が備える各要素は、技術的に可能な限りにおいて組み合わせることができ、これらを組み合わせたものも本発明の特徴を含む限り本発明の範囲に包含される。
例えば図8で説明したように、受光レベルが第5の閾値未満の状態が一定期間継続するまで、吐水開始判断の閾値を第6の閾値に設定するということは、一時的ではあるが物体検知センサ8の検知エリア12が狭まるということなる。一方、図9で説明したように受光レベルの変化量を確認する方法では、前記被検知物体13が前記物体検知センサ8の検知エリア12内へゆっくりと近づいて来た場合は、受光レベルの変化量が第2変化量を超えず、吐水開始と判断されない恐れがある。
【0037】
しかし、これら二つを組み合わせると、前記被検知物体13が物体検知センサ8の検知エリア12の遠方に存在した場合は、第2変化量で吐水開始と判断することができ、記被検知物体13がゆっくりと近づいて来た場合は第1の閾値、或いは第6の閾値により吐水開始と判断することできるため、使い勝手を全く悪化させることなく、湯気によって吐水開始と判断することを防止することができる。
【0038】
また、第1の実施形態では、第3の閾値は第1の閾値より高く設定することができなかったが、第2の実施形態を用いることで、第3の閾値を第1の閾値より高く設定しても、誤って吐水と判断しないようにすることができる。
【0039】
前記第3の閾値で吐水終了と判断した後の止水状態における、第1の閾値、第5の閾値、第6の閾値、第2変化量を用いた吐水開始判断をまとめると、図10のようなフローチャートになる。図10のフローチャートの流れを説明する。
【0040】
受光レベルが第5の閾値より小さい状態が一定時間経過したかを比較する(S1000)。受光レベルが第5の閾値より小さい状態が一定時間経過していれば(S1000でYes)、湯気の影響は無いと判断し、吐水開始判断の閾値を第1の閾値とする(S1001)。受光レベルが第5の閾値より小さい状態が一定時間経過していなければ(S1000でNo)、まだ湯気の影響が懸念されるため、吐水開始判断の閾値を第6の閾値とする(S1002)。
【0041】
続いて受光レベルと吐水開始判断の閾値とを比較する(S1003)。この時、吐水開始判断の閾値には、第1の閾値、或いは第6の閾値が設定されていることになる。受光レベルが吐水開始判断の閾値以上であれば(S1003でYes)、前記被検知物体13が前記物体検知センサ8の検知エリア12に存在する(近い距離に在る)と判断し吐水開始(S1006)と判断する。受光レベルが吐水開始判断の閾値未満であれば(S1003でNo)、次の処理(S1004)へ進む。
【0042】
続いて受光レベルの変化量と第2変化量とを比較する(S1004)。受光レベルの変化量が第2変化量以上であれば(S1004でYes)、前記被検知物体13が前記物体検知センサ8の検知エリア12内に移動して来たと判断し、吐水開始(S1006)と判断する。受光レベルの変化量が第2変化量未満であれば(S1004でNo)、止水継続(S1005)と判断する。
【0043】
かかる処理により、たとえ湯気が発生していたとしても、使い勝手を悪化させることなく、湯気により誤って吐水開始と判断することを防止することができる。
【符号の説明】
【0044】
1…洗面台
2…自動水栓
4…水栓本体
8…物体検知センサ
10…制御部
11…メモリ
12…物体検知センサ8の検知エリア
13…被検知物体
20…投光素子(送信部)
22…受光素子(受信部)
26…水側電磁弁
28…給水源
30…吐水口
43…ボウル部
52…給水ホース
53…給水ホース
55…配線
56…配線
60…シングルレバー式湯水混合水栓
73…電磁弁駆動手段
80…給湯源
81…給水ホース
82…湯側電磁弁
83…配線
85…給水ホース
86…給水ホース
【特許請求の範囲】
【請求項1】
給水経路から給水された湯水を吐出する吐水口と、
前記給水経路に接続された電磁弁と、
伝播波を送信し、その反射量を検出するセンサと、
前記伝播波の反射量が第1の閾値以上であると吐水開始であると判断し、この第1の閾値より小さな第2の閾値未満になると吐水終了であると判断する制御部と、
前記制御部の判断出力に基づいて、前記電磁弁を駆動する電磁弁駆動手段と、
を備えた自動水栓において、
前記制御部は、前記伝播波の反射量が前記第1の閾値を超えて吐水中である時に、前記伝播波の反射量が前記第2の閾値以上であっても、前記伝播波の反射量が湯気の影響による反射量であると判断した場合は吐水終了と判断することを特徴とする自動水栓。
【請求項2】
前記制御部は、前記第2の閾値よりも大きく、前記第1の閾値よりも小さな第3の閾値を設け、前記伝播波の反射量が前記第2の閾値以上であって前記第3の閾値未満であることが一定時間継続した時、吐水終了であると判断することを特徴とする、請求項1記載の自動水栓。
【請求項3】
前記制御部は、前記伝播波の反射量の変化量が第1変化量以上である時は、前記第3の閾値によって吐水終了であると判断することを停止することを特徴とする請求項2記載の自動水栓。
【請求項4】
前記制御部は、前記伝播波の反射量が湯気の影響による反射量であるため吐水終了と判断した後は、前記第1の閾値より大きな判断基準で吐水開始と判断することを特徴とする請求項2又は請求項3に記載の自動水栓。
【請求項5】
前記制御部は、前記第3の閾値によって吐水終了と判断した時は、前記第1の閾値、及び前記第3の閾値よりも小さく、前記第2の閾値よりも大きな第5の閾値を設け、前記伝播波の反射量が第5の閾値未満であることが一定時間継続するまで、前記第1の閾値の値より大きな第6の閾値を設け、前記第6の閾値で吐水開始と判断することを特徴とする請求項4記載の自動水栓。
【請求項6】
前記制御部は、前記第3の閾値によって吐水終了と判断した時は、前記伝播波の反射量の変化量が第2変化量以上である時に吐水開始であると判断することを特徴とする、請求項4に記載の自動水栓。
【請求項1】
給水経路から給水された湯水を吐出する吐水口と、
前記給水経路に接続された電磁弁と、
伝播波を送信し、その反射量を検出するセンサと、
前記伝播波の反射量が第1の閾値以上であると吐水開始であると判断し、この第1の閾値より小さな第2の閾値未満になると吐水終了であると判断する制御部と、
前記制御部の判断出力に基づいて、前記電磁弁を駆動する電磁弁駆動手段と、
を備えた自動水栓において、
前記制御部は、前記伝播波の反射量が前記第1の閾値を超えて吐水中である時に、前記伝播波の反射量が前記第2の閾値以上であっても、前記伝播波の反射量が湯気の影響による反射量であると判断した場合は吐水終了と判断することを特徴とする自動水栓。
【請求項2】
前記制御部は、前記第2の閾値よりも大きく、前記第1の閾値よりも小さな第3の閾値を設け、前記伝播波の反射量が前記第2の閾値以上であって前記第3の閾値未満であることが一定時間継続した時、吐水終了であると判断することを特徴とする、請求項1記載の自動水栓。
【請求項3】
前記制御部は、前記伝播波の反射量の変化量が第1変化量以上である時は、前記第3の閾値によって吐水終了であると判断することを停止することを特徴とする請求項2記載の自動水栓。
【請求項4】
前記制御部は、前記伝播波の反射量が湯気の影響による反射量であるため吐水終了と判断した後は、前記第1の閾値より大きな判断基準で吐水開始と判断することを特徴とする請求項2又は請求項3に記載の自動水栓。
【請求項5】
前記制御部は、前記第3の閾値によって吐水終了と判断した時は、前記第1の閾値、及び前記第3の閾値よりも小さく、前記第2の閾値よりも大きな第5の閾値を設け、前記伝播波の反射量が第5の閾値未満であることが一定時間継続するまで、前記第1の閾値の値より大きな第6の閾値を設け、前記第6の閾値で吐水開始と判断することを特徴とする請求項4記載の自動水栓。
【請求項6】
前記制御部は、前記第3の閾値によって吐水終了と判断した時は、前記伝播波の反射量の変化量が第2変化量以上である時に吐水開始であると判断することを特徴とする、請求項4に記載の自動水栓。
【図1】


【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】

【図9】

【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2013−64260(P2013−64260A)
【公開日】平成25年4月11日(2013.4.11)
【国際特許分類】
【出願番号】特願2011−203118(P2011−203118)
【出願日】平成23年9月16日(2011.9.16)
【出願人】(000010087)TOTO株式会社 (3,889)
【Fターム(参考)】
【公開日】平成25年4月11日(2013.4.11)
【国際特許分類】
【出願日】平成23年9月16日(2011.9.16)
【出願人】(000010087)TOTO株式会社 (3,889)
【Fターム(参考)】
[ Back to top ]