
自動省燃費運転システム
【課題】道路勾配を有する自動車道路において、精度の高い道路勾配データを作り込みながら、道路勾配に応じた最適な自動省燃費運転制御を行うような車両の省燃費運転制御システム及び制御方法の提供。
【解決手段】自車位置検出手段1と、エンジン制御手段2と、補助ブレーキ制御手段3と、車両速度検出手段4と、補助ブレーキ作動確認手段5と、記憶手段8と、自動省燃費運転制御手段10とを有し、自動省燃費運転制御手段10は、道路情報が無い道路を走行する場合は、補助ブレーキの作動状態によって走行中の道路を下り坂の領域L1と、下り坂手前の領域Lxと、下り坂と下り坂手前の領域の何れでもない領域L2とに識別し、記憶手段8に記憶する。
【解決手段】自車位置検出手段1と、エンジン制御手段2と、補助ブレーキ制御手段3と、車両速度検出手段4と、補助ブレーキ作動確認手段5と、記憶手段8と、自動省燃費運転制御手段10とを有し、自動省燃費運転制御手段10は、道路情報が無い道路を走行する場合は、補助ブレーキの作動状態によって走行中の道路を下り坂の領域L1と、下り坂手前の領域Lxと、下り坂と下り坂手前の領域の何れでもない領域L2とに識別し、記憶手段8に記憶する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の省燃費運転の自動制御装置に関する。
【背景技術】
【0002】
ドライバが指示した車両速度を維持して走行するシステムとして、一定速度走行システム、いわゆるオートクルーズシステムが知られている。
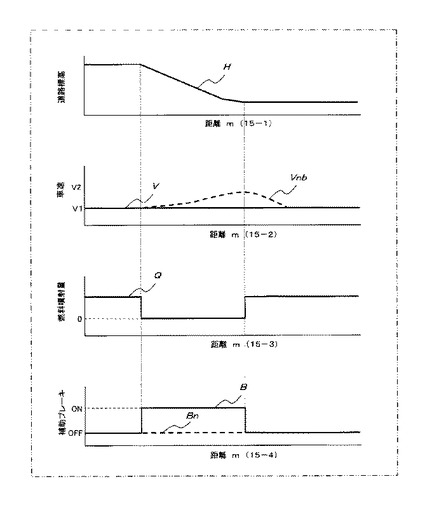
いわゆるオートクルーズシステムで走行する場合、図15で示すように、下り坂(図15の(15−1)参照:H線)では、補助ブレーキを使用しなければ(図15の(15−4)参照:破線Bn)、燃料をカットしても(図15の15−3参照:Q線)、車速Vが次第に増加してしまう(図15の15−2:破線Vnb)。
ドライバは車両が加速されてしまうために、一定車速を維持させようとして積極的に補助ブレーキを作動させる(図15の15−4:B線参照)。
しかし、補助ブレーキを作動することは、車両の運動エネルギーを熱エネルギーとして廃棄してしまうことであり、廃棄される分だけ、車両の運動エネルギーが無駄になる。したがって、必ずしも燃費の良い運転をしているとは言えない。
【0003】
この問題を解決するために、本発明者は道路勾配を加味し、ドライバの降坂・登坂時のアクセル操作及び補助ブレーキ操作に対して、アドバイス及び運転評価を行うことにより、省燃費運転を効果的に促す省燃費運転システム及びその制御を提案している(特許文献1参照)。
【0004】
係る技術(特許文献1)では、高速道路において、予め道路勾配情報データベースを解析処理装置に入力し、GPSから得られる自車の位置情報と道路勾配情報とを照合し、燃費の良い運転方法をアドバイスするものである。
しかし、当該技術(特許文献1)では、「自車の位置情報と道路勾配情報とを照合し、燃費の良い運転方法をアドバイスする」旨の記載はあるものの、具体的な車速の自動制御方法については言及されていない。
【0005】
また、一般的に高速道路は、絶えず新しい路線が新設されるために、道路勾配情報を常に更新していかなければならない。そのために、道路勾配のデータベースを作成し、記憶装置に入力することは非常な労力を要し、費用負担も増大する。
【0006】
上述した従来技術(特許文献1)では、データベースに関しては、「傾斜角センサを搭載し、GPS位置情報から勾配情報を記憶することで、データベースを作りこむ」旨の記載がなされており、傾斜角センサの搭載位置に関する記述はないが、一般的に、傾斜角センサは車両のキャビン若しくはシャーシに取り付けられる。
傾斜角センサをキャビン、シャーシの何れに搭載しても、程度の差こそあれ、路面からの入力(凹凸)による振動が傾斜角センサに加わり、精度の高いデータベースの作成は期待できない。したがって、効果的な省燃費運転のアドバイスや、自動制御による大きな省燃費効果が得られない。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2007−156704号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
上記問題点に鑑み、本発明の目的は、道路勾配を有する自動車道路において、精度の高い道路勾配データを作り込みながら、道路勾配に応じた最適な自動省燃費運転制御を行うような車両の自動省燃費運転制御システムの提供にある。
【課題を解決するための手段】
【0009】
本発明によれば、自車両の位置を検出する自車位置検出手段(1)と、エンジンの燃料噴射量を制御するエンジン制御手段(2)と、補助ブレーキの作動を制御する補助ブレーキ制御手段(3)と、補助ブレーキの作動状態を検出する補助ブレーキ作動確認手段(5)と、燃料流量を検出する燃料流量検出手段(6)と、道路勾配データおよび車両位置情報を記憶する記憶手段(8)と、省燃費運転を制御する自動省燃費運転制御手段(10)とを有する自動省燃費運転システムにおいて、前記記憶手段(8)には道路勾配データとして道路を下り坂領域(L1)と、下り坂の手前領域(Lx)と、その下り坂領域および下り坂の手前領域の何れでもないその他の領域(L2)とに識別されて記憶されており、そして前記自動省燃費運転制御手段(10)は下り坂の手前領域(Lx)に入ったか否かを判断し(S41)、下り坂の手前領域(Lx)に入ったならば、車速が第1の閾値(V1)以下の第3の閾値(V3)を超えているか否かを判断し(S42)、車速が第3の閾値(V3)を超えていれば、車速が第1の閾値(V1)以上の第2の閾値(V2)を超えているか否かを判断し(S43)、車速が第2の閾値(V2)を超えていれば燃料をカットし(S44)、補助ブレーキを作動させ、車速が第2の閾値(V2)を超えていなければ、補助ブレーキが作動しているか否かを判断し(S46)、補助ブレーキが作動していれば補助ブレーキを非作動として(S47)燃料をカットし(S48)、また補助ブレーキが作動していなければそのまま燃料をカットし(S48)、前記の車速が第3の閾値(V3)を超えていれば補助ブレーキが作動しているか否かを判断し(S49)、補助ブレーキが作動していれば、補助ブレーキを非作動として(S50)、燃料を噴射し(S51)、補助ブレーキが作動していなければそのまま燃料を噴射する(S51)機能を有している。
【0010】
また、本発明によれば、自車両の位置を検出する自車位置検出手段(1)と、エンジンの燃料噴射量を制御するエンジン制御手段(2)と、補助ブレーキの作動を制御する補助ブレーキ制御手段(3)と、補助ブレーキの作動状態を検出する補助ブレーキ作動確認手段(5)と、燃料流量を検出する燃料流量検出手段(6)と、道路勾配データおよび車両位置情報を記憶する記憶手段(8)と、省燃費運転を制御する自動省燃費運転制御手段(10)とを有する自動省燃費運転システムにおいて、前記記憶手段(8)には道路勾配データとして道路を下り坂領域(L1)と、下り坂の手前領域(Lx)と、その下り坂領域および下り坂の手前領域の何れでもないその他の領域(L2)とに識別されて記憶されており、そして前記自動省燃費運転制御手段(10)は下り坂の手前領域(Lx)に入ったか否かを判断し(S41)、下り坂の手前領域(Lx)に入っていなければ、下り坂領域(L1)であるか否かを判断し(S52)、下り坂領域(L1)であれば車速が第1の閾値(V1)以下の第3の閾値(V3)を超えているか否かを判断し(S53)、車速が第3の閾値(V3)を超えていれば車速が第1の閾値以上の第2の閾値を超えているか否かを判断し(S54)、第2の閾値(V2)を超えていれば、燃料をカットし(S55)、そして補助ブレーキを作動させ(S56)、車速が第2の閾値(V2)を超えていなければ補助ブレーキが作動しているか否かを判断し(S57)、補助ブレーキが作動していれば補助ブレーキを非作動とし(S58)、そして燃料をカットし(S59)、補助ブレーキが作動していなければそのまま燃料をカットし(S59)、車速が第3の閾値(V3)を超えていなければ、補助ブレーキが作動しているか否かを判断し(S60)、補助ブレーキが作動していれば補助ブレーキを非作動とし(S61)、そして燃料を噴射し(S62)、補助ブレーキが作動していなければそのまま燃料を噴射する(S62)とする機能を有している。
【0011】
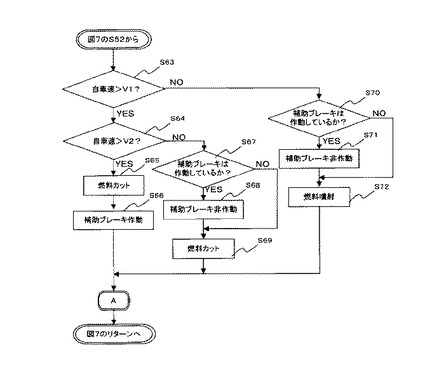
そして、本発明によれば、自車両の位置を検出する自車位置検出手段(1)と、エンジンの燃料噴射量を制御するエンジン制御手段(2)と、補助ブレーキの作動を制御する補助ブレーキ制御手段(3)と、補助ブレーキの作動状態を検出する補助ブレーキ作動確認手段(5)と、燃料流量を検出する燃料流量検出手段(6)と、道路勾配データおよび車両位置情報を記憶する記憶手段(8)と、省燃費運転を制御する自動省燃費運転制御手段(10)とを有する自動省燃費運転システムにおいて、前記記憶手段(8)には道路勾配データとして道路を下り坂領域(L1)と、下り坂の手前領域(Lx)と、その下り坂領域および下り坂の手前領域の何れでもないその他の領域(L2)とに識別されて記憶されており、そして前記自動省燃費運転制御手段(10)は下り坂の手前領域(Lx)に入ったか否かを判断し(S41)、下り坂の手前領域(Lx)に入っていなければ、下り坂領域(L1)であるか否かを判断し(S52)、下り坂領域(L1)でなければ車速が第1の閾値(V1)を超えているか否かを判断し(S63)、車速が第1の閾値(V1)を超えていれば車速が第1の閾値以上の第2の閾値(V2)を超えているか否かを判断し(S64)、車速が第2の閾値(V2)を超えていれば、燃料をカットし(S65)、そして補助ブレーキを作動させ(S66)、車速が第2の閾値(V2)を超えていなければ補助ブレーキが作動しているか否かを判断し(S67)、補助ブレーキが作動していれば補助ブレーキを非作動とし(S68)、そして燃料をカットし(S69)、補助ブレーキが作動していなければそのまま燃料をカットし(S69)、車速が第1の閾値(V1)を超えていなければ、補助ブレーキが作動しているか否かを判断し(S70)、補助ブレーキが作動していれば補助ブレーキを非作動とし(S71)、そして燃料を噴射し(S72)、補助ブレーキが作動していなければそのまま燃料を噴射する(S72)とする機能を有している。
【発明の効果】
【0012】
上述した構成を具備する本発明の自動省燃費運転システム(101、102)によれば、道路情報が無い道路を走行する場合は、補助ブレーキの作動状態によって走行中の道路を下り坂の領域(L1)と、下り坂手前の領域(Lx)と、下り坂と下り坂手前の領域の何れでもない領域(L2)とに識別し、識別したデータを識別したデータの領域に対応する位置情報と関連付けて前記記憶手段(データベース8)に記憶するように構成されているので、新たな道路を走るたびに勾配情報が蓄積できる。したがって、2度目以降の走行の際(道路情報が有る場合)には、蓄積された下り坂のデータによって、一層高度な省燃費運転ができる。
【0013】
特に同一道路の2回目以降の走行時には、下り坂では安全を確保した上で、減速操作(補助ブレーキの使用)を極力押さえることによって、位置エネルギーを有効に運動エネルギーに変換させられる。そして、得られた運動エネルギーを、例えば上り勾配の初めにも活用ができるので、一層の省燃費運転が実現できる。
【0014】
上述した構成を具備する本発明の自動省燃費運転システム(103、104)によれば、道路情報が無い道路を走行する場合は、エンジン制御手段(2)から得られるエンジントルク率及び車両速度検出手段(4)から得られる加速度を求め、エンジントルク率が閾値以上で且つその時の加速度が所定値以下の場合に上り坂と判定し勾配情報として、その時の位置情報と共に該勾配情報を記憶手段(8)に記憶するように構成されているので、新たな道路(上り勾配)を走るたびに勾配情報が蓄積できる。
【0015】
したがって、2度目以降の走行の際(道路情報が有る場合)には、特に上り勾配においては、蓄積された上り坂のデータによって、負荷に応じ、且つ燃費の良いエンジン制御ができる。
【図面の簡単な説明】
【0016】
【図1】本発明の参考例の構成を示すブロック図。
【図2】参考例において、道路情報の無い下り勾配を省燃費運転で走行する際の各種特性を示す特性図。
【図3】参考例において、道路情報のある下り勾配を省燃費運転で走行する際の各種特性を示す特性図。
【図4】参考例で、省燃費運転をセットする際の制御フローチャート。
【図5】参考例で、省燃費運転のセット後、坂道情報の有無を確認するまでの段階における制御フローチャート。
【図6】参考例で、坂道(下り坂)情報が無い場合の自動省燃費運転の制御フローチャート。
【図7】実施形態で、坂道(下り坂)情報がある場合の自動省燃費運転の制御フローチャート。
【図8】別の実施形態で、坂道(下り坂)情報がある場合の自動省燃費運転の制御フローチャートであって、図7とは別の段階を示すフローチャート。
【図9】別の実施形態の構成を示すブロック図。
【図10】さらに別の実施形態の構成を示すブロック図。
【図11】さらに別の実施形態の自動省燃費運転の制御フローチャート。
【図12】さらに別の実施形態において、ギヤ比とエンジントルク率閾値の値との関係を示した特性図。
【図13】さらに別の実施形態において、ギヤ比と加速度閾値の値との関係を示した特性図。
【図14】他の実施形態の構成を示すブロック図。
【図15】従来技術によるオートクルーズ走行制御における降坂時の制御パターンを示した特性図。
【発明を実施するための形態】
【0017】
以下、添付図面を参照して、本発明の実施形態について説明する。
最初に、図1〜図6を参照して、参考例を説明する。
【0018】
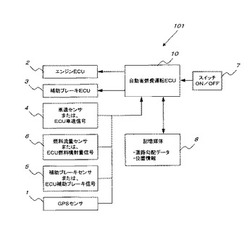
図1において、全体を符号101で示す自動省燃費運転システムは、GPSセンサ1と、エンジンコントローラ2と、補助ブレーキコントローラ3と、車速センサ4と、補助ブレーキセンサ5と、燃料流量センサ6と、データベース8と、コントロールユニット10と、コントロールユニット10を操作して自動省燃費運転を起動・停止させるON/OFFスイッチ7とを備えている。
【0019】
GPSセンサ1は、自車両の位置を検出するための自車位置検出手段である。
エンジンコントローラ2は、エンジンへの燃料供給量(又は、燃料噴射量)を調節して、エンジン回転数を制御するように構成されている。
補助ブレーキコントローラ3は、補助ブレーキ(図示せず:例えば、排気ブレーキ)の起動・停止を行わせる。
補助ブレーキセンサ5は、補助ブレーキの作動・非作動を検出する。
燃料流量センサ(燃料流量計)6は、エンジンに供給される燃料流量を検出している。
データベース8は、記憶手段であり、既に走行したことのある道路の道路勾配データ及びその道路勾配データを持つ道路の所在位置情報が記憶されている。
【0020】
自動省燃費運転システム101は、車両が道路情報の無い道路を走行する場合には、補助ブレーキセンサ5によって補助ブレーキの作動状態を検知して、走行中の道路を下り坂の領域L1(図2、図3参照)と、下り坂手前の領域Lx(図2、図3参照)と、下り坂の領域と下り坂手前の領域の何れにも該当しない領域(その他の領域)L2(図2、図3参照)とに識別する。そして、識別したデータ(領域に関するデータ)を、当該識別したデータ(領域)に対応する位置情報と関連付けて、データベース8に記憶するように構成されている。
【0021】
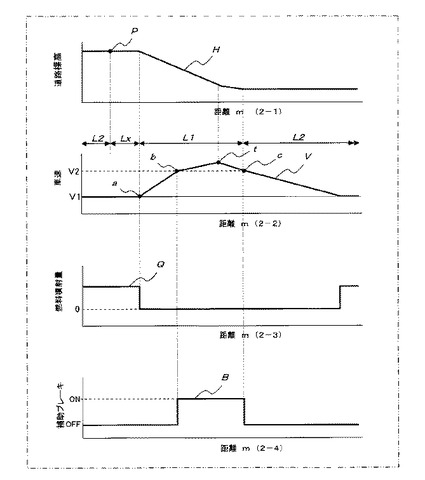
図2は、車両が未だ道路情報を取得していない下り勾配を有する道路を降坂する場合において、時間軸を横軸とし、縦軸として、走行距離に対する道路標高(2−1参照:H線)、車速(2−2参照:V線)、燃料噴射量(2−3参照:Q線)、補助ブレーキの作動状態(2−4参照:B線)をとり、時間軸(横軸)を同じスケールに表して、(2−1〜2−4を)同時に示している。
【0022】
図2において、図示しないドライバは予めON/OFFスイッチ7をONにしている。
車両が坂を下りはじめ、コントロールユニット10は、車載した車速センサ4が第1の閾値V1を超えたa点(V線)を、下り坂の始点であると認識する。
コントロールユニット10は、下り坂の始点と認識したa点から、燃料供給を停止するべくエンジンコントローラ2に制御信号を発信し、エンジンへの燃料供給が停止される(燃料噴射量=0:図2の2−3参照)。
a点を通過した直後の領域では、エンジンへの燃料供給が停止されても(燃料噴射量=0)、未だ制動をかけていないので、車両は速度を増し、加速していく。
【0023】
下り坂の途中(図2の2−2におけるb点)で、車速は第2の閾値V2を超える。第2の閾値V2を超えた時点(b点に到達した時点)で、コントロールユニット10は図示しない補助ブレーキに制御信号を発信し、補助ブレーキが作動する(補助ブレーキがOFFからON:図2の2−4参照)。
補助ブレーキが作動することにより、車両の加速の度合いが減少する。そして、t点(図2の2−1参照)で車両の速度が減速に転じ、c点(図2の2−1参照)で第2の閾値V2以下となる。車速が第2の閾値V2以下となった時点(c点を超えた時点)で、コントロールユニット10は、補助ブレーキを非作動とするべく補助ブレーキに対して制御信号を発信する(補助ブレーキがONからOFF:図2の2−4参照)。
【0024】
コントロールユニット10は、a点からc点までの区間を下り坂の領域L1と判定し、a点から所定時間(所定距離)手前(図2では左側)の地点P点とa点との区間を、下り坂手前の領域Lxと判定する。
そしてコントロールユニット10は、下り坂の領域L1と下り坂手前の領域Lxとを除いた領域を、その他の領域(下り坂の領域でもなく、下り坂手前の領域でもない領域)L2と判定する。
コントロールユニット10は、これら三つの領域L1、Lx、L2を、それぞれの領域に対応する位置情報と関連付けて、データベース8に記憶させる。
【0025】
車両が道路情報の無い道路(例えば走行したことのない道路)を走行する場合の省燃費運転モードにおける制御は、以上述べた態様で行われる。
それに対して、図3は、既に道路情報がデータベース8に記憶された道路(道路情報がある道路)を走行する場合における降坂時の制御の一部を示している。
以下、図3を参照して、道路情報がある道路を走行する場合における降坂時の制御について説明する。
【0026】
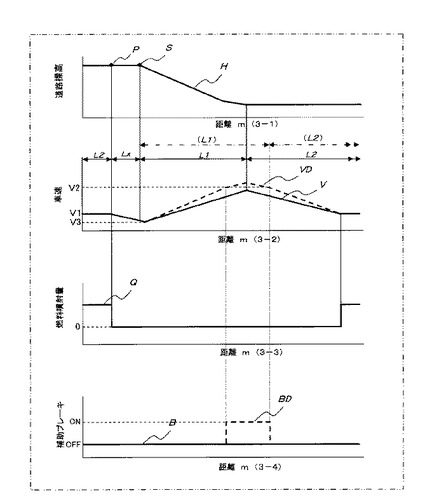
図3も、図2と同様に、横軸に時間軸をとり、縦軸に、下り勾配を有する道路を降坂する際の走行距離に対する道路標高(3−1参照:H線)、車速(3−2参照:V線)、燃料噴射量(3−3参照:Q線)、補助ブレーキの作動状態(3−4参照:B線)をとり、時間軸(横軸)を同じスケールに表して、同時に示している。
また、車速の変化を示すのV線(3−2参照)及び補助ブレーキの作動を示すのB線(3−4参照)において、符号VD或いは符号BDで示す破線部分は、下り坂の勾配が急で、車速が第2の閾値V2を超えた状態における挙動(特性)を示している。
【0027】
図3の3−1において、P点まではクルーズセット車速V1(第1の閾値)を維持して走行している。
P点を超えた時点で、コントロールユニット10は、燃料噴射をカット(燃料供給を停止)するべく、制御信号をエンジンコントローラ2に発信する(燃料噴射量=0:図3の3−3参照)。図3の3−1におけるP点を越えた直後の領域では、補助ブレーキはOFFのままである(図3の3−4参照)。
車速Vは、下り坂の始点Sを僅かに過ぎた地点まで車速V3まで減速する。この際に、車両に対しては、P点まで車速V1で走行していた惰性が作用している(惰行している)。
【0028】
下り坂の始点Sを超えると、下り坂に入っているため、車速Vは増加していく。ここで、大きな下り勾配がなければ、車速は第2の閾値V2を超えることはない。
下り坂が終わった時点、正確には下り勾配の終点からやや走行した時点で、車両は減速しはじめる。そして第1の閾値V1まで速度を落とし、以後、V1を維持する。
コントロールユニット10は、車速がV1まで下がった時点で、再び燃料供給を開始するべく、エンジンコントローラ2に制御信号を送る(燃料噴射量が0ではなくなる:図3の3−3参照)。
【0029】
ここで、大きな下り勾配がある場合は、図3(3−2)において破線(VD線)で示すように、車速Vは第2の閾値V2を超えてしまう。
コントローラ10は、車速Vが第2の閾値V2を越えた時点で、補助ブレーキを作動させる(補助ブレーキがOFFからON:図3の3−4の破線BD参照)。
【0030】
次に、図4〜図6を参照して、参考例の省燃費運転の制御について、説明する。
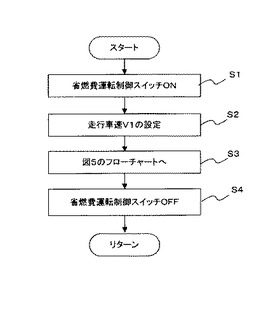
図4のフローチャートは、省燃費運転をセット(起動)する制御を示している。
図4において、ステップS1でドライバは省燃費運転制御スイッチ(ON/OFFスイッチ)7をONにし、走行車速(第1の閾値)V1を設定する(ステップS2)。
次のステップS3では、図5で示すフローチャートに移行し、省燃費運転を行う。
ステップS4では、省燃費運転から通常運転に移行するため、ON/OFFスイッチ7をOFFにして、省燃費運転の制御を終了する。
【0031】
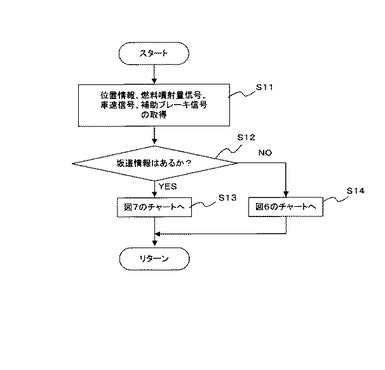
図5は、省燃費運転中の制御を示す。
コントロールユニット10は、位置情報、燃料噴射量信号、車速信号、補助ブレーキ信号を取得し(ステップS11)、車両がこれから走行しようとする坂道について、坂道情報があるか否かを判断する(ステップS12)。
坂道情報があれば(ステップS12がYES)、ステップS13に進む。一方、坂道情報が無ければ、すなわち初めて通過する坂であれば(ステップS12がNO)、ステップS14に進む。
【0032】
ステップS13(ステップS12がYES)では、図7の制御フローチャート(坂道情報がある場合の制御チャート)に進んだ後、図5のステップS11に戻り、図5のステップS11以降を繰り返す。
一方、ステップS14(ステップS12がNO)では、図6の制御フローチャート(坂道情報が無い場合の制御チャート)に進んだ後、ステップS11に戻り、ステップS11以降を繰り返す。
【0033】
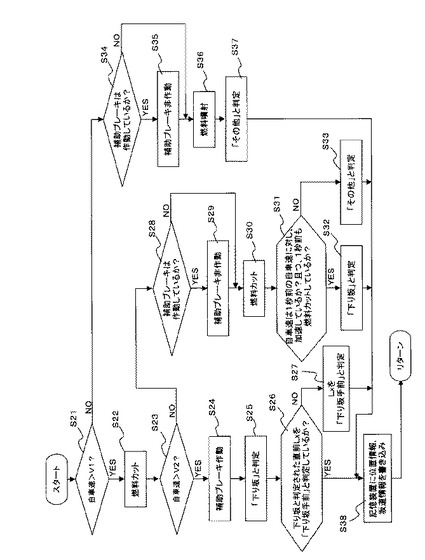
図6のフローチャートに基づいて図2をも参照して、坂道情報が無い場合の制御について説明する。
図6において、先ず、ステップS21では、コントロールユニット10は、車速が第1の閾値、すなわちオートクルーズの設定速度V1を超えたか否かを判断する。第1の閾値V1を超えたなら(ステップS21がYES)、ステップS22に進み、第1の閾値V1以下であれば(ステップS22がNO)、ステップS34に進む。
ここで、コントロールユニット10は、車両が第1の閾値V1を越えた時点で「下り坂」に入ったと判断し、当該地点(図2の2−2のa点)を下り坂に入った地点と認識する。
【0034】
ステップS22では、コントロールユニット10は、燃料をカットするべく、エンジンコントローラ2に制御信号を送る。エンジンコントローラ2は、図示しない燃料供給装置に制御信号を送り、燃料供給を停止する(図2の2−2において、燃料噴射量=0)。
ここで、ステップS22で燃料供給を停止しても、下り坂を走行しているため、車速は次第に加速される。次のステップS23では、車速が第2の閾値V2を超えたか否かを判断する。
【0035】
車速が第2の閾値V2を超えたなら(ステップS23がYES)、補助ブレーキ(図示せず)を作動させるべく補助ブレーキコントローラ3に制御信号を送り、補助ブレーキコントローラ3は補助ブレーキを作動させる(S24)。
補助ブレーキを作動させると、車速の増加は減少し、やがて車速は減速に転じる。そして、車速が第1の閾値V2以下になり、更に減速する。
そしてコントロールユニット10は、車速が第1の閾値V2以下に戻った瞬間の車両の位置(図2の2−2のc点)を認識する。
【0036】
コントロールユニット10は、次のステップS25で、「下り坂」に入った地点(図2の2−2のa点)と、車速が第1の閾値V2以下になった地点(図2の2−2のc点)との間の領域を、「下り坂の領域」L1として認識し、下り坂の領域L1をデータベース8に記憶させる。
【0037】
ステップS26では、コントロールユニット10は、下り坂に入ったと判定された地点(a点:図2の2−2参照)から、それ以前に遡った(図2において左側に戻った)特定地点(P点:図2の2−1参照)までの間を、「下り坂手前の領域」Lxとして既に判定しているか否かを判断する。
下り坂に入ったと判定された地点(a点)と、それ以前に遡った地点(P点)までの間を「下り坂手前の領域」Lxと既に判定していたなら(ステップS26がYES)、ステップS38に進む。その時点において点a〜点P間の領域を「下り坂手前の領域」Lxと判定していなければ(ステップS26がNO)、点a〜点P間の領域を「下り坂手前の領域」Lxと判定し(ステップS27)、ステップS38に進む。
【0038】
ステップS28(ステップS23がNOのルート)では、補助ブレーキが作動しているか否かを判断する。補助ブレーキが作動していれば(ステップS28がYES)、補助ブレーキを非作動にするべく、補助ブレーキコントローラに制御信号を送り(S29)、ステップS30に進む。補助ブレーキが作動していなければ(ステップS28がNO)、そのままステップS30に進む。
【0039】
ステップS30では、コントロールユニット10は、エンジンコントローラ2に制御信号を送り、燃料供給をカットする。そしてステップS31に進み、コントロールユニット10は、車速が直前(たとえば1秒前)の車速より増加(加速)しており、且つ、直前においても燃料カットを行っているか否かを判断する。
車速が直前(たとえば1秒前)の車速より加速しており、且つ、直前も燃料カットを行っていれば(ステップS31がYES)、「下り坂の領域」L1と判定して(S32)、ステップS38に進む。
一方、車速が直前(たとえば1秒前)の車速より加速していないか、或いは、直前も燃料カットを行っていないのであれば(ステップS31がNO)、「その他の領域」L2と判定して(ステップS33)、ステップS38に進む。
【0040】
ステップS34(ステップS21がNOのルート)では、補助ブレーキが作動しているか否かを判断する。
車速がV1に達していない領域であれば、本来、補助ブレーキは作動しない。それにもかかわらず、補助ブレーキが作動していれば(ステップS34がYES)、補助ブレーキを非作動にするべく補助ブレーキコントローラに制御信号を送り(S35)、ステップS36に進む。補助ブレーキが作動していなければ(ステップS34がNO)、そのままステップS36に進む。
ステップS36では、燃料を噴射させるべくエンジンコントローラ2に制御信号を送り、「その他の領域(下り坂でもなく、下り坂手前でもない領域)」L2と判定し(ステップS37)、ステップS38に進む。
【0041】
ステップS38では、コントロールユニット10は、求めた坂道情報、すなわち、「下り坂の領域」L1、「下り坂手前の領域」Lx、「その他の領域」L2を、GPSセンサで特定されるその時点における自車の位置情報と関連付けて、データベース8に記憶する。そして、ステップS21に戻り、再びステップS21以降の制御を繰り返す。
【0042】
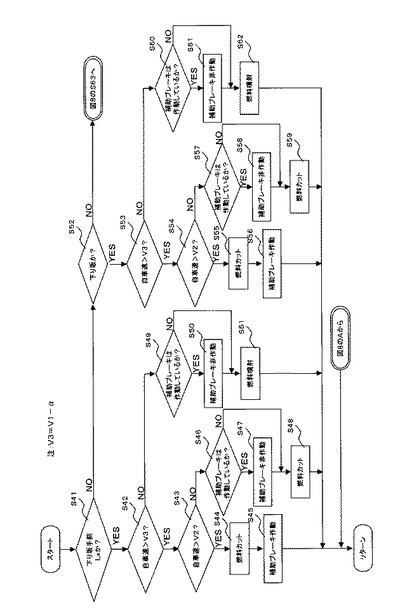
次に、図7、図8のフローチャートを主として参照して本発明の実施の形態について図3をも参照して、坂道情報がある場合の制御について説明する。
なお、図7と図8とは、同一の制御を2つのフローチャートに分割して示している。
【0043】
図7において、先ずステップS41では、コントロールユニット10は、坂道情報を参照して、下り坂手前の領域Lxに入ったか否かを判断する。
下り坂手前の領域Lxに入ったならば(ステップS41がYES)ステップS42に進み、下り坂手前の領域Lxに入っていなければ(ステップS42がNO)ステップS52に進む。
【0044】
ステップS42では、コントロールユニット10は、車速Vが第1の閾値よりも値の小さな第3の閾値V3を超えているか否かを判断する。
車速Vが第3の閾値V3を超えていれば(ステップS42がYES)ステップS43に進み、車速が第3の閾値V3を超えていなければ(ステップS42がNO)ステップS49に進む。
【0045】
ステップS43では、車速Vが第2の閾値V2を超えているか否かを判断する。
車速が第2の閾値V2を超えていれば(ステップS43がYES)ステップS44に進み、車速が第2の閾値を超えてなければ(ステップS43がNO)ステップS46に進む。
【0046】
ステップS44では、燃料をカットするべく、エンジンコントローラ2に制御信号を送る。エンジンコントローラ2は図示しない燃料供給装置に制御信号を送り燃料供給を停止する。
車速が第2の閾値を超えた状態(ステップS43がYESの状態)は、図3の3−2において点線VDにおける頂上近傍の状態であり、車速が非常に速い。そして、下り坂に到達すれば、さらに加速されてしまうので、早い段階で制動する必要がある。そのため、次のステップS45では、コントロールユニット10は、補助ブレーキコントローラ3に制御信号を送り、補助ブレーキを作動させる。その後、ステップS41に戻り、ステップS41以降を繰り返す。
【0047】
ステップS46(ステップS43がNO)では、車速はV3以下であるため、本来的には補助ブレーキは作動しない。この時点では、確認的な意味で、補助ブレーキが作動しているか否かを判断する。
何らかの状況で補助ブレーキが作動していれば(ステップS46がYES)、補助ブレーキの作動を解除して(非作動として:ステップS47)、ステップS48に進む。補助ブレーキが作動していなければ(ステップS46がNO)、そのままステップS48に進む。
ステップS48では、コントロールユニット10は燃料カットするべくエンジンコントローラ2に制御信号を送る。そして、ステップS41に戻り、ステップS41以降を繰り返す。
【0048】
ステップS49(ステップS42がNO)の状況でも、車速はV3以下なので、補助ブレーキは本来作動しない。コントロールユニット10は、確認的な意味で、補助ブレーキが作動しているか否かを判断する。
補助ブレーキが作動していれば(ステップS49がYES)、補助ブレーキを非作動とし(ステップS50)、ステップS51に進む。一方、補助ブレーキが作動していなければ(ステップS49がNO)、そのままステップS51に進む。
一方、ステップS49(ステップS42がNO)の状況、すなわち車速がV3以下の状況では、下り坂に侵入する以前の段階で減速され過ぎて、走行に不都合な状況が発生する可能性がある。そのためステップS51では、コントロールユニット10は燃料を供給するべくエンジンコントローラ2に制御信号を送る。そして、ステップS41に戻り、ステップS41以降を繰り返す。
【0049】
ステップS52(ステップS41がNOのルート)では、コントロールユニット10は、下り坂の領域L1か否かを判断する。
下り坂の領域L1であれば(ステップS52がYES)、ステップS53に進み、下り坂の領域L1でなければ(その他の領域L2の場合でステップS52がNO)、図8のステップS63に進む。
【0050】
ステップS53では、コントロールユニット10は、車速Vが第3の閾値V3を超えているか否かを判断する。車速Vが第3の閾値V3を超えていれば(ステップS53がYES)ステップS54に進む。車速が第3の閾値V3を超えていなければ(ステップS53がNO)、減速され過ぎているので、燃料を噴射する必要があり、ステップS60に進む。
【0051】
ステップS54では、車速Vが第2の閾値V2を超えているか否かを判断する。車速が第2の閾値V2を超えていれば(ステップS54がYES)、車速が早すぎるので、補助ブレーキにより制動する必要があり、ステップS55に進み、車速が第2の閾値V2を超えてなければ(ステップS54がNO)、ステップS57に進む。
【0052】
ステップS55では、燃料をカットするべく、エンジンコントローラ2に制御信号を送る。エンジンコントローラ2は図示しない燃料供給装置に制御信号を送り燃料供給を停止する。
ここで、燃料供給を停止しても、下り坂を走行しているので、車速Vは加速される可能性があり、性動する必要がある。そのため、次のステップS56では、コントロールユニット10は、補助ブレーキコントローラ3に制御信号を送り、補助ブレーキを作動させる。その後、ステップS41に戻り、ステップS41以降を繰り返す。
【0053】
ステップS57(ステップS54がNO)では、車速はV2を越えていないので、補助ブレーキは本来的には作動する必要が無い。そのため、ステップS57で補助ブレーキが作動しているか否かを判断し、補助ブレーキが作動していれば(ステップS57がYES)補助ブレーキを非作動とし(ステップS58)、ステップS59に進む。補助ブレーキが作動していなければ(ステップS57がNO)、そのままステップS59に進む。
ステップS59では、コントロールユニット10は燃料カットするべくエンジンコントローラ2に制御信号を送る。そして、ステップS41に戻り、ステップS41以降を繰り返す。
【0054】
ステップS60(ステップS53がNO)でも、車速がV2を超えていないので、補助ブレーキを作動する必要が無い。そのため、ステップS60において補助ブレーキが作動しているか否かを判断し、補助ブレーキが作動していれば(ステップS60がYES)補助ブレーキを非作動とし(ステップS61)、ステップS62に進む。補助ブレーキが作動していなければ(ステップS60がNO)、そのままステップS62に進む。
ここで、ステップS53がNOの状況では、車速が遅くなり過ぎており、走行に不都合を生じる恐れがある。そのためステップS62で、燃料を噴射するべく制御する。そしてステップS41に戻り、ステップS41以降を繰り返す。
【0055】
図8において、ステップS63は、ステップS52がNOの場合であり、その他の領域L2を走行している場合である。
ステップS63では、車速が第1の閾値V1を越えているか否かを判断する。車速が第1の閾値V1を超えていれば(ステップS63がYES)、ステップS64に進み、第1の閾値V1を超えていなければ(ステップS63がNO)、ステップS70に進む。
【0056】
ステップS64では、車速Vが第2の閾値V2を超えているか否かを判断する。車速が第2の閾値V2を超えていれば(ステップS64がYES)、ステップS65に進み、車速が第2の閾値を超えてなければ(ステップS64がNO)、ステップS67に進む。
【0057】
ステップS65では、車速がV2を超えた高速となっているので、燃料をカットするべく、エンジンコントローラ2に制御信号を送る。
ここで、車速がV2を超える高速であれば、安全のため、制動する必要がある。次のステップS66では、コントロールユニット10は、補助ブレーキコントローラ3に制御信号を送り、補助ブレーキを作動させる。そして、図7のステップS41に戻り、ステップS41以降を繰り返す。
【0058】
ステップS67(ステップS64がNO)では、車速はV2を越えていないので、本来的には補助ブレーキを作動する必要が無い。そのため、ステップS67では、補助ブレーキが作動しているか否かを判断する。補助ブレーキが作動していれば(ステップS67がYES)、補助ブレーキを非作動とし(ステップS68)、ステップS69に進む。一方、補助ブレーキが作動していなければ(ステップS67がNO)、そのままステップS69に進む。
ステップS69では、コントロールユニット10は、燃料カットするべくエンジンコントローラ2に制御信号を送る。そして、図7のステップS41に戻り、ステップS41以降を繰り返す。
【0059】
ステップS70(ステップS63がNOのルート)も、車速はV2を越えていないので、本来的には補助ブレーキを作動する必要が無い。ステップS70では、補助ブレーキが作動しているか否かを判断し、補助ブレーキが作動していれば(ステップS70がYES)補助ブレーキを非作動として(ステップS71)、ステップS72に進む。一方、補助ブレーキが作動していなければ(ステップS70がNO)、そのままステップS72に進む。
ステップS72では、コントロールユニット10は燃料を供給するべくエンジンコントローラ2に制御信号を送る。そして、図7のステップS41に戻り、ステップS41以降を繰り返す。
【0060】
次に、図9を参照して、本発明の別の実施形態について説明する。
図7、図8の実施形態では、制御に必要なパラメータの検出手段、すなわちGPSセンサ1、車速センサ4、補助ブレーキセンサ5、燃料流量センサ6及び制御ユニットであるエンジンコントローラ2、補助ブレーキコントローラ3、データベース8は、それぞれ専用の回路によって、車載コントロールユニット10に接続されている。
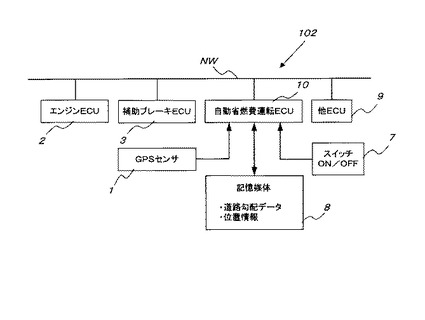
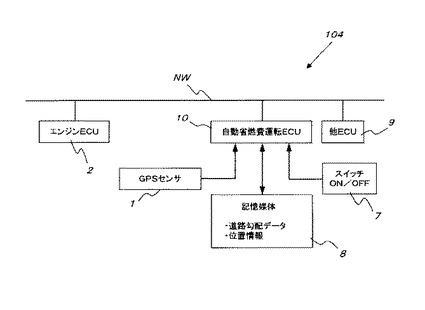
それに対して、図9の別の実施形態に係る自動省燃費運転システム102では、制御ユニットであるエンジンコントローラ2、補助ブレーキコントローラ3、その他のユニットのコントローラ9における制御信号は、社内通信ネットワーク(車内LAN)NWによって、自動省燃費運転コントロールユニット10に伝送されるように構成されている。
図9の別の実施形態におけるその他の構成及び作用効果については、図1〜図6の参考例および図7、図8の実施形態と同様である。
【0061】
上述した構成を具備した実施形態及び別の実施形態によれば、コントロールユニット10は、道路情報が無い道路を走行する場合は、車速、燃料噴射量、補助ブレーキの作動状態に基いて、走行中の道路を、下り坂の領域L1と、下り坂手前の領域Lxと、下り坂でも下り坂手前の領域でもない領域L2とに識別することができる。そして、識別したデータを対応する位置情報と関連付けてデータベース8に記憶することにより、新たな道路を走るたびに、当該道路の勾配情報が蓄積できる。したがって、2度目以降の走行の際(道路情報が有る場合)には、初回の走行時に蓄積された下り坂のデータによって、一層高度な省燃費運転ができる。
【0062】
そして、同一の道路を2回目以降に走行する際には、下り坂における走行の安全を確保した上で、減速操作(補助ブレーキの使用)を極力押さえることによって、位置エネルギーを有効に運動エネルギーに変換して、より一層、燃料消費量を節約することができる。そして、例えば上り勾配の初めにおいて、それまでに得られた運動エネルギーを活用すれば、さらなる省燃費運転が実現できる。
【0063】
次に、図10〜14を参照して、本発明のさらに別の実施形態について説明する。
図7〜図9の実施形態及び別の実施形態では、専ら降坂時において、より省燃費に走行することを狙いとしている。
それに対してさらに別の実施形態は、登坂時に、いわゆる「もたつき感」を覚えることなく、省燃費走行を実現させるためのシステムである。
【0064】
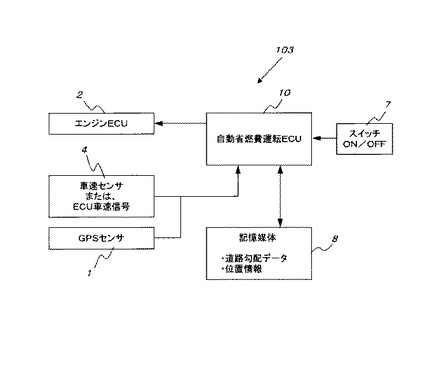
図10において、全体を符号103で示す自動省燃費運転システムは、GPSセンサ1と、エンジンコントローラ2と、車速センサ4と、データベース8と、コントロールユニット20と、コントロールユニット20を操作して自動省燃費運転を起動・停止させるON/OFFスイッチ7とを備えている。
【0065】
さらに別の実施形態の上記の各構成要素は、実施形態と同様である。
ここでデータベース8は、実施形態で用いられたデータベース8の機能に加えて、位置情報を得るに際して、GPSの衛星数が多い方のデータを優先する機能を有している。
【0066】
自動省燃費運転システム103のコントロールユニット20は、道路情報が無い道路を走行する場合は、勾配情報の一つとして、以下に記述する態様で「上り坂」を判定する。
すなわち、コントロールユニット20は、エンジンコントローラ2から得たエンジントルク率と、車速センサ4から得られる加速度とを求める。そして、エンジントルク率が閾値T1以上で、且つ、その時の加速度が所定値G1以下の場合に、上り坂と判定する。
そして「上り坂」と判定した判定結果、或いは、「上り坂」と判定しなかった判定結果を、勾配情報として、当該判定が行われた地点の位置情報と共に、データベース8で記憶するように構成されている。
ここで、エンジンのトルク率とは、その時のエンジントルクを最大エンジントルクで除した値であり、「%」で表示される。
【0067】
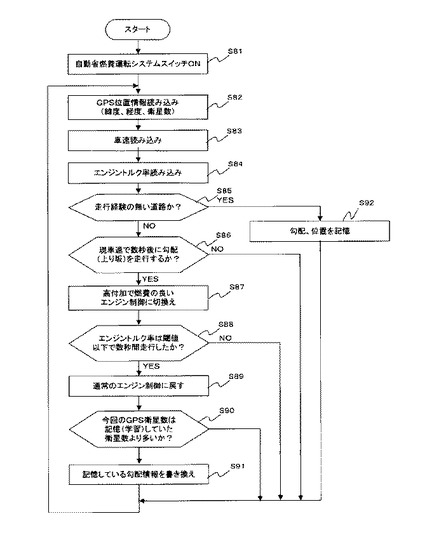
次に、図11のフローチャートに基づいて、さらに別の実施形態の省燃費運転の制御方法を説明する。
図11において、先ず、ステップS81で、ドライバは自動省燃費運転システムのON/OFFスイッチをONにする。
次に、GPS位置情報(緯度、経度、発信原のGPS衛星の数)を読み込み(ステップS82)、車速センサ4によって車速を読み取り(ステップS83)、エンジンコントローラ2からの情報によってエンジントルク率を(演算して)読み込む(ステップS84)。
【0068】
次のステップS85では、コントロールユニット20は、走行経験の無い(まだデータを取っていない初めての)道路か否かを判断する。既に走ったことのある(道路情報のある)道路であれば(ステップS85がNO)、ステップS86に進む。
一方、初めての道路であれば(ステップS85でYES)、今回の走行で得た勾配及びその勾配の位置をデータベース8に記憶した(ステップS92)後、ステップS82まで戻り、再びステップS82以降を繰り返す。
【0069】
ステップS86では、その時点の車速で走行し続けると、数秒後に上り坂を走行することになるか否かを判断する。その時点における車速で走行した際に、数秒後に上り坂を走行することになるのであれば(ステップS86がYES)、高負荷で且つ燃費の良いエンジン制御に切換えるように、エンジンコントローラ2に制御信号を送る(ステップS87)。
一方、その時点の車速で走行し続けても、数秒後に上り坂を走行することが無い場合には(ステップS86がNO)、ステップS82まで戻り、再びステップS82以降を繰り返す。
【0070】
次のステップS88では、エンジントルク率が閾値T1以下の状態で、所定時間(数秒間)走行したか否かを判断する。エンジントルク率が閾値T1以下の状態で、所定時間(数秒間)走行できるということは、上り坂が終わり、車両が平坦路に移ったことを意味している。
エンジントルク率が閾値T1以下の状態で、所定時間(数秒間)走行したならば(ステップS88がYES)、通常のエンジン制御に戻し(ステップS89)、ステップS90に進む。
一方、エンジントルク率が閾値T1以下の状態では、所定時間(数秒間)走行することが出来ない場合には(ステップS88がNO)、上り坂が続くものと判断して、ステップS82まで戻り、再びステップS82以降を繰り返す。
【0071】
ステップS90では、コントロールユニット20は、その時点の制御サイクルのステップS82で読み込まれたGPS位置情報を提供したGPS衛星の数が、既に記憶していた(学習していた)GPS位置情報を提供したGPS衛星数よりも多いか否かを判断する。
GPS衛星数が多い方が、GPS位置情報が正確であり、それに伴い、得られた勾配情報も正確である。そのため、既に記憶していた勾配情報に関するGPS衛星数よりも、今回の制御サイクルで読み込まれた情報を提供したGPS衛星数の方が多ければ(ステップS90がYES)、既に記憶されていた勾配情報を、今回の制御サイクルで新たに得られた勾配情報(勾配データ)に書き換える(ステップS91)。
その後、ステップS82まで戻り、再びステップS82以降を繰り返す。
【0072】
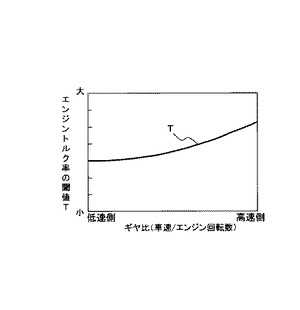
図12は、ギヤ比(横軸)と、エンジントルク率の閾値T1との関係を示している。ギヤ比は、車速をエンジン回転数で除した値に比例している。
図12において、横軸の右側の領域が高速側、すなわち高段側を示している。
図12では、ギヤ比が高速側(高段側)になるに従って、トルク率の閾値T1の値が増加している。
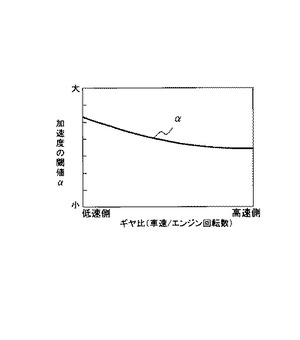
図13は、ギヤ比(横軸)と、加速度の閾値α1との関係を示している。
図13では、ギヤ比が高速側(高段側:図13の横軸が右側の領域)になるに従って、加速度の閾値α1の値は減少している。
【0073】
次に、図14を参照して、本発明の他の実施形態を説明する。
図10〜図13のさらに別の実施形態では、エンジンコントローラ2と、その他のユニットのコントローラ9は、それぞれ専用の回路(別個のケーブル)によって、車載コントロールユニット10に接続されている。
それに対して、図14の他の実施形態では、エンジンコントローラ2及びその他のユニットのコントローラ9が、社内通信ネットワーク(車内LAN)NWによって、自動省燃費運転コントロールユニット10に接続されている。
図14の他の実施形態におけるその他の構成及び作用効果については、図9〜図13の第3実施形態と同様である。
【0074】
上述した構成を具備したさらに別の実施形態及び他の実施形態によれば、コントロールユニット20は、道路情報が無い道路を走行する場合は、エンジンコントローラ2から得られるエンジントルク率及び車速センサ4から得られる加速度を求め、エンジントルク率が閾値T1以上で且つその時の加速度が所定値α1以下の場合に上り坂と判定し、上り勾配情報として、その時の位置情報と共に該勾配情報をデータベース8に記憶するので、新たな道路(上り勾配)を走るたびに、道路の勾配情報が蓄積される。
したがって、2度目以降の走行の際(道路情報が有る場合)には、特に上り勾配においては、蓄積された上り坂のデータによって、負荷に応じ、且つ燃費の良いエンジン制御ができる。
【0075】
図示の実施形態はあくまでも例示であり、本発明の技術的範囲を限定する趣旨の記述ではない旨を付記する。
【符号の説明】
【0076】
1・・・自車位置検出手段/GPSセンサ
2・・・エンジン制御手段/エンジンコントローラ
3・・・補助ブレーキ制御手段/補助ブレーキコントローラ
4・・・車両速度計測手段/車速センサ
5・・・補助ブレーキ作動確認手段/補助ブレーキセンサ
6・・・燃料流量検出手段/燃料流量センサ
7・・・ON・OFFスイッチ
8・・・記憶手段/データベース
10・・・自動省燃費運転制御装置/コントロールユニット
101〜104・・・自動省燃費運転システム
L1・・・下り坂の領域
Lx・・・下り坂手前の領域
L2・・・下り坂の領域と下り坂手前の領域の何れでもない領域
【技術分野】
【0001】
本発明は、車両の省燃費運転の自動制御装置に関する。
【背景技術】
【0002】
ドライバが指示した車両速度を維持して走行するシステムとして、一定速度走行システム、いわゆるオートクルーズシステムが知られている。
いわゆるオートクルーズシステムで走行する場合、図15で示すように、下り坂(図15の(15−1)参照:H線)では、補助ブレーキを使用しなければ(図15の(15−4)参照:破線Bn)、燃料をカットしても(図15の15−3参照:Q線)、車速Vが次第に増加してしまう(図15の15−2:破線Vnb)。
ドライバは車両が加速されてしまうために、一定車速を維持させようとして積極的に補助ブレーキを作動させる(図15の15−4:B線参照)。
しかし、補助ブレーキを作動することは、車両の運動エネルギーを熱エネルギーとして廃棄してしまうことであり、廃棄される分だけ、車両の運動エネルギーが無駄になる。したがって、必ずしも燃費の良い運転をしているとは言えない。
【0003】
この問題を解決するために、本発明者は道路勾配を加味し、ドライバの降坂・登坂時のアクセル操作及び補助ブレーキ操作に対して、アドバイス及び運転評価を行うことにより、省燃費運転を効果的に促す省燃費運転システム及びその制御を提案している(特許文献1参照)。
【0004】
係る技術(特許文献1)では、高速道路において、予め道路勾配情報データベースを解析処理装置に入力し、GPSから得られる自車の位置情報と道路勾配情報とを照合し、燃費の良い運転方法をアドバイスするものである。
しかし、当該技術(特許文献1)では、「自車の位置情報と道路勾配情報とを照合し、燃費の良い運転方法をアドバイスする」旨の記載はあるものの、具体的な車速の自動制御方法については言及されていない。
【0005】
また、一般的に高速道路は、絶えず新しい路線が新設されるために、道路勾配情報を常に更新していかなければならない。そのために、道路勾配のデータベースを作成し、記憶装置に入力することは非常な労力を要し、費用負担も増大する。
【0006】
上述した従来技術(特許文献1)では、データベースに関しては、「傾斜角センサを搭載し、GPS位置情報から勾配情報を記憶することで、データベースを作りこむ」旨の記載がなされており、傾斜角センサの搭載位置に関する記述はないが、一般的に、傾斜角センサは車両のキャビン若しくはシャーシに取り付けられる。
傾斜角センサをキャビン、シャーシの何れに搭載しても、程度の差こそあれ、路面からの入力(凹凸)による振動が傾斜角センサに加わり、精度の高いデータベースの作成は期待できない。したがって、効果的な省燃費運転のアドバイスや、自動制御による大きな省燃費効果が得られない。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2007−156704号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
上記問題点に鑑み、本発明の目的は、道路勾配を有する自動車道路において、精度の高い道路勾配データを作り込みながら、道路勾配に応じた最適な自動省燃費運転制御を行うような車両の自動省燃費運転制御システムの提供にある。
【課題を解決するための手段】
【0009】
本発明によれば、自車両の位置を検出する自車位置検出手段(1)と、エンジンの燃料噴射量を制御するエンジン制御手段(2)と、補助ブレーキの作動を制御する補助ブレーキ制御手段(3)と、補助ブレーキの作動状態を検出する補助ブレーキ作動確認手段(5)と、燃料流量を検出する燃料流量検出手段(6)と、道路勾配データおよび車両位置情報を記憶する記憶手段(8)と、省燃費運転を制御する自動省燃費運転制御手段(10)とを有する自動省燃費運転システムにおいて、前記記憶手段(8)には道路勾配データとして道路を下り坂領域(L1)と、下り坂の手前領域(Lx)と、その下り坂領域および下り坂の手前領域の何れでもないその他の領域(L2)とに識別されて記憶されており、そして前記自動省燃費運転制御手段(10)は下り坂の手前領域(Lx)に入ったか否かを判断し(S41)、下り坂の手前領域(Lx)に入ったならば、車速が第1の閾値(V1)以下の第3の閾値(V3)を超えているか否かを判断し(S42)、車速が第3の閾値(V3)を超えていれば、車速が第1の閾値(V1)以上の第2の閾値(V2)を超えているか否かを判断し(S43)、車速が第2の閾値(V2)を超えていれば燃料をカットし(S44)、補助ブレーキを作動させ、車速が第2の閾値(V2)を超えていなければ、補助ブレーキが作動しているか否かを判断し(S46)、補助ブレーキが作動していれば補助ブレーキを非作動として(S47)燃料をカットし(S48)、また補助ブレーキが作動していなければそのまま燃料をカットし(S48)、前記の車速が第3の閾値(V3)を超えていれば補助ブレーキが作動しているか否かを判断し(S49)、補助ブレーキが作動していれば、補助ブレーキを非作動として(S50)、燃料を噴射し(S51)、補助ブレーキが作動していなければそのまま燃料を噴射する(S51)機能を有している。
【0010】
また、本発明によれば、自車両の位置を検出する自車位置検出手段(1)と、エンジンの燃料噴射量を制御するエンジン制御手段(2)と、補助ブレーキの作動を制御する補助ブレーキ制御手段(3)と、補助ブレーキの作動状態を検出する補助ブレーキ作動確認手段(5)と、燃料流量を検出する燃料流量検出手段(6)と、道路勾配データおよび車両位置情報を記憶する記憶手段(8)と、省燃費運転を制御する自動省燃費運転制御手段(10)とを有する自動省燃費運転システムにおいて、前記記憶手段(8)には道路勾配データとして道路を下り坂領域(L1)と、下り坂の手前領域(Lx)と、その下り坂領域および下り坂の手前領域の何れでもないその他の領域(L2)とに識別されて記憶されており、そして前記自動省燃費運転制御手段(10)は下り坂の手前領域(Lx)に入ったか否かを判断し(S41)、下り坂の手前領域(Lx)に入っていなければ、下り坂領域(L1)であるか否かを判断し(S52)、下り坂領域(L1)であれば車速が第1の閾値(V1)以下の第3の閾値(V3)を超えているか否かを判断し(S53)、車速が第3の閾値(V3)を超えていれば車速が第1の閾値以上の第2の閾値を超えているか否かを判断し(S54)、第2の閾値(V2)を超えていれば、燃料をカットし(S55)、そして補助ブレーキを作動させ(S56)、車速が第2の閾値(V2)を超えていなければ補助ブレーキが作動しているか否かを判断し(S57)、補助ブレーキが作動していれば補助ブレーキを非作動とし(S58)、そして燃料をカットし(S59)、補助ブレーキが作動していなければそのまま燃料をカットし(S59)、車速が第3の閾値(V3)を超えていなければ、補助ブレーキが作動しているか否かを判断し(S60)、補助ブレーキが作動していれば補助ブレーキを非作動とし(S61)、そして燃料を噴射し(S62)、補助ブレーキが作動していなければそのまま燃料を噴射する(S62)とする機能を有している。
【0011】
そして、本発明によれば、自車両の位置を検出する自車位置検出手段(1)と、エンジンの燃料噴射量を制御するエンジン制御手段(2)と、補助ブレーキの作動を制御する補助ブレーキ制御手段(3)と、補助ブレーキの作動状態を検出する補助ブレーキ作動確認手段(5)と、燃料流量を検出する燃料流量検出手段(6)と、道路勾配データおよび車両位置情報を記憶する記憶手段(8)と、省燃費運転を制御する自動省燃費運転制御手段(10)とを有する自動省燃費運転システムにおいて、前記記憶手段(8)には道路勾配データとして道路を下り坂領域(L1)と、下り坂の手前領域(Lx)と、その下り坂領域および下り坂の手前領域の何れでもないその他の領域(L2)とに識別されて記憶されており、そして前記自動省燃費運転制御手段(10)は下り坂の手前領域(Lx)に入ったか否かを判断し(S41)、下り坂の手前領域(Lx)に入っていなければ、下り坂領域(L1)であるか否かを判断し(S52)、下り坂領域(L1)でなければ車速が第1の閾値(V1)を超えているか否かを判断し(S63)、車速が第1の閾値(V1)を超えていれば車速が第1の閾値以上の第2の閾値(V2)を超えているか否かを判断し(S64)、車速が第2の閾値(V2)を超えていれば、燃料をカットし(S65)、そして補助ブレーキを作動させ(S66)、車速が第2の閾値(V2)を超えていなければ補助ブレーキが作動しているか否かを判断し(S67)、補助ブレーキが作動していれば補助ブレーキを非作動とし(S68)、そして燃料をカットし(S69)、補助ブレーキが作動していなければそのまま燃料をカットし(S69)、車速が第1の閾値(V1)を超えていなければ、補助ブレーキが作動しているか否かを判断し(S70)、補助ブレーキが作動していれば補助ブレーキを非作動とし(S71)、そして燃料を噴射し(S72)、補助ブレーキが作動していなければそのまま燃料を噴射する(S72)とする機能を有している。
【発明の効果】
【0012】
上述した構成を具備する本発明の自動省燃費運転システム(101、102)によれば、道路情報が無い道路を走行する場合は、補助ブレーキの作動状態によって走行中の道路を下り坂の領域(L1)と、下り坂手前の領域(Lx)と、下り坂と下り坂手前の領域の何れでもない領域(L2)とに識別し、識別したデータを識別したデータの領域に対応する位置情報と関連付けて前記記憶手段(データベース8)に記憶するように構成されているので、新たな道路を走るたびに勾配情報が蓄積できる。したがって、2度目以降の走行の際(道路情報が有る場合)には、蓄積された下り坂のデータによって、一層高度な省燃費運転ができる。
【0013】
特に同一道路の2回目以降の走行時には、下り坂では安全を確保した上で、減速操作(補助ブレーキの使用)を極力押さえることによって、位置エネルギーを有効に運動エネルギーに変換させられる。そして、得られた運動エネルギーを、例えば上り勾配の初めにも活用ができるので、一層の省燃費運転が実現できる。
【0014】
上述した構成を具備する本発明の自動省燃費運転システム(103、104)によれば、道路情報が無い道路を走行する場合は、エンジン制御手段(2)から得られるエンジントルク率及び車両速度検出手段(4)から得られる加速度を求め、エンジントルク率が閾値以上で且つその時の加速度が所定値以下の場合に上り坂と判定し勾配情報として、その時の位置情報と共に該勾配情報を記憶手段(8)に記憶するように構成されているので、新たな道路(上り勾配)を走るたびに勾配情報が蓄積できる。
【0015】
したがって、2度目以降の走行の際(道路情報が有る場合)には、特に上り勾配においては、蓄積された上り坂のデータによって、負荷に応じ、且つ燃費の良いエンジン制御ができる。
【図面の簡単な説明】
【0016】
【図1】本発明の参考例の構成を示すブロック図。
【図2】参考例において、道路情報の無い下り勾配を省燃費運転で走行する際の各種特性を示す特性図。
【図3】参考例において、道路情報のある下り勾配を省燃費運転で走行する際の各種特性を示す特性図。
【図4】参考例で、省燃費運転をセットする際の制御フローチャート。
【図5】参考例で、省燃費運転のセット後、坂道情報の有無を確認するまでの段階における制御フローチャート。
【図6】参考例で、坂道(下り坂)情報が無い場合の自動省燃費運転の制御フローチャート。
【図7】実施形態で、坂道(下り坂)情報がある場合の自動省燃費運転の制御フローチャート。
【図8】別の実施形態で、坂道(下り坂)情報がある場合の自動省燃費運転の制御フローチャートであって、図7とは別の段階を示すフローチャート。
【図9】別の実施形態の構成を示すブロック図。
【図10】さらに別の実施形態の構成を示すブロック図。
【図11】さらに別の実施形態の自動省燃費運転の制御フローチャート。
【図12】さらに別の実施形態において、ギヤ比とエンジントルク率閾値の値との関係を示した特性図。
【図13】さらに別の実施形態において、ギヤ比と加速度閾値の値との関係を示した特性図。
【図14】他の実施形態の構成を示すブロック図。
【図15】従来技術によるオートクルーズ走行制御における降坂時の制御パターンを示した特性図。
【発明を実施するための形態】
【0017】
以下、添付図面を参照して、本発明の実施形態について説明する。
最初に、図1〜図6を参照して、参考例を説明する。
【0018】
図1において、全体を符号101で示す自動省燃費運転システムは、GPSセンサ1と、エンジンコントローラ2と、補助ブレーキコントローラ3と、車速センサ4と、補助ブレーキセンサ5と、燃料流量センサ6と、データベース8と、コントロールユニット10と、コントロールユニット10を操作して自動省燃費運転を起動・停止させるON/OFFスイッチ7とを備えている。
【0019】
GPSセンサ1は、自車両の位置を検出するための自車位置検出手段である。
エンジンコントローラ2は、エンジンへの燃料供給量(又は、燃料噴射量)を調節して、エンジン回転数を制御するように構成されている。
補助ブレーキコントローラ3は、補助ブレーキ(図示せず:例えば、排気ブレーキ)の起動・停止を行わせる。
補助ブレーキセンサ5は、補助ブレーキの作動・非作動を検出する。
燃料流量センサ(燃料流量計)6は、エンジンに供給される燃料流量を検出している。
データベース8は、記憶手段であり、既に走行したことのある道路の道路勾配データ及びその道路勾配データを持つ道路の所在位置情報が記憶されている。
【0020】
自動省燃費運転システム101は、車両が道路情報の無い道路を走行する場合には、補助ブレーキセンサ5によって補助ブレーキの作動状態を検知して、走行中の道路を下り坂の領域L1(図2、図3参照)と、下り坂手前の領域Lx(図2、図3参照)と、下り坂の領域と下り坂手前の領域の何れにも該当しない領域(その他の領域)L2(図2、図3参照)とに識別する。そして、識別したデータ(領域に関するデータ)を、当該識別したデータ(領域)に対応する位置情報と関連付けて、データベース8に記憶するように構成されている。
【0021】
図2は、車両が未だ道路情報を取得していない下り勾配を有する道路を降坂する場合において、時間軸を横軸とし、縦軸として、走行距離に対する道路標高(2−1参照:H線)、車速(2−2参照:V線)、燃料噴射量(2−3参照:Q線)、補助ブレーキの作動状態(2−4参照:B線)をとり、時間軸(横軸)を同じスケールに表して、(2−1〜2−4を)同時に示している。
【0022】
図2において、図示しないドライバは予めON/OFFスイッチ7をONにしている。
車両が坂を下りはじめ、コントロールユニット10は、車載した車速センサ4が第1の閾値V1を超えたa点(V線)を、下り坂の始点であると認識する。
コントロールユニット10は、下り坂の始点と認識したa点から、燃料供給を停止するべくエンジンコントローラ2に制御信号を発信し、エンジンへの燃料供給が停止される(燃料噴射量=0:図2の2−3参照)。
a点を通過した直後の領域では、エンジンへの燃料供給が停止されても(燃料噴射量=0)、未だ制動をかけていないので、車両は速度を増し、加速していく。
【0023】
下り坂の途中(図2の2−2におけるb点)で、車速は第2の閾値V2を超える。第2の閾値V2を超えた時点(b点に到達した時点)で、コントロールユニット10は図示しない補助ブレーキに制御信号を発信し、補助ブレーキが作動する(補助ブレーキがOFFからON:図2の2−4参照)。
補助ブレーキが作動することにより、車両の加速の度合いが減少する。そして、t点(図2の2−1参照)で車両の速度が減速に転じ、c点(図2の2−1参照)で第2の閾値V2以下となる。車速が第2の閾値V2以下となった時点(c点を超えた時点)で、コントロールユニット10は、補助ブレーキを非作動とするべく補助ブレーキに対して制御信号を発信する(補助ブレーキがONからOFF:図2の2−4参照)。
【0024】
コントロールユニット10は、a点からc点までの区間を下り坂の領域L1と判定し、a点から所定時間(所定距離)手前(図2では左側)の地点P点とa点との区間を、下り坂手前の領域Lxと判定する。
そしてコントロールユニット10は、下り坂の領域L1と下り坂手前の領域Lxとを除いた領域を、その他の領域(下り坂の領域でもなく、下り坂手前の領域でもない領域)L2と判定する。
コントロールユニット10は、これら三つの領域L1、Lx、L2を、それぞれの領域に対応する位置情報と関連付けて、データベース8に記憶させる。
【0025】
車両が道路情報の無い道路(例えば走行したことのない道路)を走行する場合の省燃費運転モードにおける制御は、以上述べた態様で行われる。
それに対して、図3は、既に道路情報がデータベース8に記憶された道路(道路情報がある道路)を走行する場合における降坂時の制御の一部を示している。
以下、図3を参照して、道路情報がある道路を走行する場合における降坂時の制御について説明する。
【0026】
図3も、図2と同様に、横軸に時間軸をとり、縦軸に、下り勾配を有する道路を降坂する際の走行距離に対する道路標高(3−1参照:H線)、車速(3−2参照:V線)、燃料噴射量(3−3参照:Q線)、補助ブレーキの作動状態(3−4参照:B線)をとり、時間軸(横軸)を同じスケールに表して、同時に示している。
また、車速の変化を示すのV線(3−2参照)及び補助ブレーキの作動を示すのB線(3−4参照)において、符号VD或いは符号BDで示す破線部分は、下り坂の勾配が急で、車速が第2の閾値V2を超えた状態における挙動(特性)を示している。
【0027】
図3の3−1において、P点まではクルーズセット車速V1(第1の閾値)を維持して走行している。
P点を超えた時点で、コントロールユニット10は、燃料噴射をカット(燃料供給を停止)するべく、制御信号をエンジンコントローラ2に発信する(燃料噴射量=0:図3の3−3参照)。図3の3−1におけるP点を越えた直後の領域では、補助ブレーキはOFFのままである(図3の3−4参照)。
車速Vは、下り坂の始点Sを僅かに過ぎた地点まで車速V3まで減速する。この際に、車両に対しては、P点まで車速V1で走行していた惰性が作用している(惰行している)。
【0028】
下り坂の始点Sを超えると、下り坂に入っているため、車速Vは増加していく。ここで、大きな下り勾配がなければ、車速は第2の閾値V2を超えることはない。
下り坂が終わった時点、正確には下り勾配の終点からやや走行した時点で、車両は減速しはじめる。そして第1の閾値V1まで速度を落とし、以後、V1を維持する。
コントロールユニット10は、車速がV1まで下がった時点で、再び燃料供給を開始するべく、エンジンコントローラ2に制御信号を送る(燃料噴射量が0ではなくなる:図3の3−3参照)。
【0029】
ここで、大きな下り勾配がある場合は、図3(3−2)において破線(VD線)で示すように、車速Vは第2の閾値V2を超えてしまう。
コントローラ10は、車速Vが第2の閾値V2を越えた時点で、補助ブレーキを作動させる(補助ブレーキがOFFからON:図3の3−4の破線BD参照)。
【0030】
次に、図4〜図6を参照して、参考例の省燃費運転の制御について、説明する。
図4のフローチャートは、省燃費運転をセット(起動)する制御を示している。
図4において、ステップS1でドライバは省燃費運転制御スイッチ(ON/OFFスイッチ)7をONにし、走行車速(第1の閾値)V1を設定する(ステップS2)。
次のステップS3では、図5で示すフローチャートに移行し、省燃費運転を行う。
ステップS4では、省燃費運転から通常運転に移行するため、ON/OFFスイッチ7をOFFにして、省燃費運転の制御を終了する。
【0031】
図5は、省燃費運転中の制御を示す。
コントロールユニット10は、位置情報、燃料噴射量信号、車速信号、補助ブレーキ信号を取得し(ステップS11)、車両がこれから走行しようとする坂道について、坂道情報があるか否かを判断する(ステップS12)。
坂道情報があれば(ステップS12がYES)、ステップS13に進む。一方、坂道情報が無ければ、すなわち初めて通過する坂であれば(ステップS12がNO)、ステップS14に進む。
【0032】
ステップS13(ステップS12がYES)では、図7の制御フローチャート(坂道情報がある場合の制御チャート)に進んだ後、図5のステップS11に戻り、図5のステップS11以降を繰り返す。
一方、ステップS14(ステップS12がNO)では、図6の制御フローチャート(坂道情報が無い場合の制御チャート)に進んだ後、ステップS11に戻り、ステップS11以降を繰り返す。
【0033】
図6のフローチャートに基づいて図2をも参照して、坂道情報が無い場合の制御について説明する。
図6において、先ず、ステップS21では、コントロールユニット10は、車速が第1の閾値、すなわちオートクルーズの設定速度V1を超えたか否かを判断する。第1の閾値V1を超えたなら(ステップS21がYES)、ステップS22に進み、第1の閾値V1以下であれば(ステップS22がNO)、ステップS34に進む。
ここで、コントロールユニット10は、車両が第1の閾値V1を越えた時点で「下り坂」に入ったと判断し、当該地点(図2の2−2のa点)を下り坂に入った地点と認識する。
【0034】
ステップS22では、コントロールユニット10は、燃料をカットするべく、エンジンコントローラ2に制御信号を送る。エンジンコントローラ2は、図示しない燃料供給装置に制御信号を送り、燃料供給を停止する(図2の2−2において、燃料噴射量=0)。
ここで、ステップS22で燃料供給を停止しても、下り坂を走行しているため、車速は次第に加速される。次のステップS23では、車速が第2の閾値V2を超えたか否かを判断する。
【0035】
車速が第2の閾値V2を超えたなら(ステップS23がYES)、補助ブレーキ(図示せず)を作動させるべく補助ブレーキコントローラ3に制御信号を送り、補助ブレーキコントローラ3は補助ブレーキを作動させる(S24)。
補助ブレーキを作動させると、車速の増加は減少し、やがて車速は減速に転じる。そして、車速が第1の閾値V2以下になり、更に減速する。
そしてコントロールユニット10は、車速が第1の閾値V2以下に戻った瞬間の車両の位置(図2の2−2のc点)を認識する。
【0036】
コントロールユニット10は、次のステップS25で、「下り坂」に入った地点(図2の2−2のa点)と、車速が第1の閾値V2以下になった地点(図2の2−2のc点)との間の領域を、「下り坂の領域」L1として認識し、下り坂の領域L1をデータベース8に記憶させる。
【0037】
ステップS26では、コントロールユニット10は、下り坂に入ったと判定された地点(a点:図2の2−2参照)から、それ以前に遡った(図2において左側に戻った)特定地点(P点:図2の2−1参照)までの間を、「下り坂手前の領域」Lxとして既に判定しているか否かを判断する。
下り坂に入ったと判定された地点(a点)と、それ以前に遡った地点(P点)までの間を「下り坂手前の領域」Lxと既に判定していたなら(ステップS26がYES)、ステップS38に進む。その時点において点a〜点P間の領域を「下り坂手前の領域」Lxと判定していなければ(ステップS26がNO)、点a〜点P間の領域を「下り坂手前の領域」Lxと判定し(ステップS27)、ステップS38に進む。
【0038】
ステップS28(ステップS23がNOのルート)では、補助ブレーキが作動しているか否かを判断する。補助ブレーキが作動していれば(ステップS28がYES)、補助ブレーキを非作動にするべく、補助ブレーキコントローラに制御信号を送り(S29)、ステップS30に進む。補助ブレーキが作動していなければ(ステップS28がNO)、そのままステップS30に進む。
【0039】
ステップS30では、コントロールユニット10は、エンジンコントローラ2に制御信号を送り、燃料供給をカットする。そしてステップS31に進み、コントロールユニット10は、車速が直前(たとえば1秒前)の車速より増加(加速)しており、且つ、直前においても燃料カットを行っているか否かを判断する。
車速が直前(たとえば1秒前)の車速より加速しており、且つ、直前も燃料カットを行っていれば(ステップS31がYES)、「下り坂の領域」L1と判定して(S32)、ステップS38に進む。
一方、車速が直前(たとえば1秒前)の車速より加速していないか、或いは、直前も燃料カットを行っていないのであれば(ステップS31がNO)、「その他の領域」L2と判定して(ステップS33)、ステップS38に進む。
【0040】
ステップS34(ステップS21がNOのルート)では、補助ブレーキが作動しているか否かを判断する。
車速がV1に達していない領域であれば、本来、補助ブレーキは作動しない。それにもかかわらず、補助ブレーキが作動していれば(ステップS34がYES)、補助ブレーキを非作動にするべく補助ブレーキコントローラに制御信号を送り(S35)、ステップS36に進む。補助ブレーキが作動していなければ(ステップS34がNO)、そのままステップS36に進む。
ステップS36では、燃料を噴射させるべくエンジンコントローラ2に制御信号を送り、「その他の領域(下り坂でもなく、下り坂手前でもない領域)」L2と判定し(ステップS37)、ステップS38に進む。
【0041】
ステップS38では、コントロールユニット10は、求めた坂道情報、すなわち、「下り坂の領域」L1、「下り坂手前の領域」Lx、「その他の領域」L2を、GPSセンサで特定されるその時点における自車の位置情報と関連付けて、データベース8に記憶する。そして、ステップS21に戻り、再びステップS21以降の制御を繰り返す。
【0042】
次に、図7、図8のフローチャートを主として参照して本発明の実施の形態について図3をも参照して、坂道情報がある場合の制御について説明する。
なお、図7と図8とは、同一の制御を2つのフローチャートに分割して示している。
【0043】
図7において、先ずステップS41では、コントロールユニット10は、坂道情報を参照して、下り坂手前の領域Lxに入ったか否かを判断する。
下り坂手前の領域Lxに入ったならば(ステップS41がYES)ステップS42に進み、下り坂手前の領域Lxに入っていなければ(ステップS42がNO)ステップS52に進む。
【0044】
ステップS42では、コントロールユニット10は、車速Vが第1の閾値よりも値の小さな第3の閾値V3を超えているか否かを判断する。
車速Vが第3の閾値V3を超えていれば(ステップS42がYES)ステップS43に進み、車速が第3の閾値V3を超えていなければ(ステップS42がNO)ステップS49に進む。
【0045】
ステップS43では、車速Vが第2の閾値V2を超えているか否かを判断する。
車速が第2の閾値V2を超えていれば(ステップS43がYES)ステップS44に進み、車速が第2の閾値を超えてなければ(ステップS43がNO)ステップS46に進む。
【0046】
ステップS44では、燃料をカットするべく、エンジンコントローラ2に制御信号を送る。エンジンコントローラ2は図示しない燃料供給装置に制御信号を送り燃料供給を停止する。
車速が第2の閾値を超えた状態(ステップS43がYESの状態)は、図3の3−2において点線VDにおける頂上近傍の状態であり、車速が非常に速い。そして、下り坂に到達すれば、さらに加速されてしまうので、早い段階で制動する必要がある。そのため、次のステップS45では、コントロールユニット10は、補助ブレーキコントローラ3に制御信号を送り、補助ブレーキを作動させる。その後、ステップS41に戻り、ステップS41以降を繰り返す。
【0047】
ステップS46(ステップS43がNO)では、車速はV3以下であるため、本来的には補助ブレーキは作動しない。この時点では、確認的な意味で、補助ブレーキが作動しているか否かを判断する。
何らかの状況で補助ブレーキが作動していれば(ステップS46がYES)、補助ブレーキの作動を解除して(非作動として:ステップS47)、ステップS48に進む。補助ブレーキが作動していなければ(ステップS46がNO)、そのままステップS48に進む。
ステップS48では、コントロールユニット10は燃料カットするべくエンジンコントローラ2に制御信号を送る。そして、ステップS41に戻り、ステップS41以降を繰り返す。
【0048】
ステップS49(ステップS42がNO)の状況でも、車速はV3以下なので、補助ブレーキは本来作動しない。コントロールユニット10は、確認的な意味で、補助ブレーキが作動しているか否かを判断する。
補助ブレーキが作動していれば(ステップS49がYES)、補助ブレーキを非作動とし(ステップS50)、ステップS51に進む。一方、補助ブレーキが作動していなければ(ステップS49がNO)、そのままステップS51に進む。
一方、ステップS49(ステップS42がNO)の状況、すなわち車速がV3以下の状況では、下り坂に侵入する以前の段階で減速され過ぎて、走行に不都合な状況が発生する可能性がある。そのためステップS51では、コントロールユニット10は燃料を供給するべくエンジンコントローラ2に制御信号を送る。そして、ステップS41に戻り、ステップS41以降を繰り返す。
【0049】
ステップS52(ステップS41がNOのルート)では、コントロールユニット10は、下り坂の領域L1か否かを判断する。
下り坂の領域L1であれば(ステップS52がYES)、ステップS53に進み、下り坂の領域L1でなければ(その他の領域L2の場合でステップS52がNO)、図8のステップS63に進む。
【0050】
ステップS53では、コントロールユニット10は、車速Vが第3の閾値V3を超えているか否かを判断する。車速Vが第3の閾値V3を超えていれば(ステップS53がYES)ステップS54に進む。車速が第3の閾値V3を超えていなければ(ステップS53がNO)、減速され過ぎているので、燃料を噴射する必要があり、ステップS60に進む。
【0051】
ステップS54では、車速Vが第2の閾値V2を超えているか否かを判断する。車速が第2の閾値V2を超えていれば(ステップS54がYES)、車速が早すぎるので、補助ブレーキにより制動する必要があり、ステップS55に進み、車速が第2の閾値V2を超えてなければ(ステップS54がNO)、ステップS57に進む。
【0052】
ステップS55では、燃料をカットするべく、エンジンコントローラ2に制御信号を送る。エンジンコントローラ2は図示しない燃料供給装置に制御信号を送り燃料供給を停止する。
ここで、燃料供給を停止しても、下り坂を走行しているので、車速Vは加速される可能性があり、性動する必要がある。そのため、次のステップS56では、コントロールユニット10は、補助ブレーキコントローラ3に制御信号を送り、補助ブレーキを作動させる。その後、ステップS41に戻り、ステップS41以降を繰り返す。
【0053】
ステップS57(ステップS54がNO)では、車速はV2を越えていないので、補助ブレーキは本来的には作動する必要が無い。そのため、ステップS57で補助ブレーキが作動しているか否かを判断し、補助ブレーキが作動していれば(ステップS57がYES)補助ブレーキを非作動とし(ステップS58)、ステップS59に進む。補助ブレーキが作動していなければ(ステップS57がNO)、そのままステップS59に進む。
ステップS59では、コントロールユニット10は燃料カットするべくエンジンコントローラ2に制御信号を送る。そして、ステップS41に戻り、ステップS41以降を繰り返す。
【0054】
ステップS60(ステップS53がNO)でも、車速がV2を超えていないので、補助ブレーキを作動する必要が無い。そのため、ステップS60において補助ブレーキが作動しているか否かを判断し、補助ブレーキが作動していれば(ステップS60がYES)補助ブレーキを非作動とし(ステップS61)、ステップS62に進む。補助ブレーキが作動していなければ(ステップS60がNO)、そのままステップS62に進む。
ここで、ステップS53がNOの状況では、車速が遅くなり過ぎており、走行に不都合を生じる恐れがある。そのためステップS62で、燃料を噴射するべく制御する。そしてステップS41に戻り、ステップS41以降を繰り返す。
【0055】
図8において、ステップS63は、ステップS52がNOの場合であり、その他の領域L2を走行している場合である。
ステップS63では、車速が第1の閾値V1を越えているか否かを判断する。車速が第1の閾値V1を超えていれば(ステップS63がYES)、ステップS64に進み、第1の閾値V1を超えていなければ(ステップS63がNO)、ステップS70に進む。
【0056】
ステップS64では、車速Vが第2の閾値V2を超えているか否かを判断する。車速が第2の閾値V2を超えていれば(ステップS64がYES)、ステップS65に進み、車速が第2の閾値を超えてなければ(ステップS64がNO)、ステップS67に進む。
【0057】
ステップS65では、車速がV2を超えた高速となっているので、燃料をカットするべく、エンジンコントローラ2に制御信号を送る。
ここで、車速がV2を超える高速であれば、安全のため、制動する必要がある。次のステップS66では、コントロールユニット10は、補助ブレーキコントローラ3に制御信号を送り、補助ブレーキを作動させる。そして、図7のステップS41に戻り、ステップS41以降を繰り返す。
【0058】
ステップS67(ステップS64がNO)では、車速はV2を越えていないので、本来的には補助ブレーキを作動する必要が無い。そのため、ステップS67では、補助ブレーキが作動しているか否かを判断する。補助ブレーキが作動していれば(ステップS67がYES)、補助ブレーキを非作動とし(ステップS68)、ステップS69に進む。一方、補助ブレーキが作動していなければ(ステップS67がNO)、そのままステップS69に進む。
ステップS69では、コントロールユニット10は、燃料カットするべくエンジンコントローラ2に制御信号を送る。そして、図7のステップS41に戻り、ステップS41以降を繰り返す。
【0059】
ステップS70(ステップS63がNOのルート)も、車速はV2を越えていないので、本来的には補助ブレーキを作動する必要が無い。ステップS70では、補助ブレーキが作動しているか否かを判断し、補助ブレーキが作動していれば(ステップS70がYES)補助ブレーキを非作動として(ステップS71)、ステップS72に進む。一方、補助ブレーキが作動していなければ(ステップS70がNO)、そのままステップS72に進む。
ステップS72では、コントロールユニット10は燃料を供給するべくエンジンコントローラ2に制御信号を送る。そして、図7のステップS41に戻り、ステップS41以降を繰り返す。
【0060】
次に、図9を参照して、本発明の別の実施形態について説明する。
図7、図8の実施形態では、制御に必要なパラメータの検出手段、すなわちGPSセンサ1、車速センサ4、補助ブレーキセンサ5、燃料流量センサ6及び制御ユニットであるエンジンコントローラ2、補助ブレーキコントローラ3、データベース8は、それぞれ専用の回路によって、車載コントロールユニット10に接続されている。
それに対して、図9の別の実施形態に係る自動省燃費運転システム102では、制御ユニットであるエンジンコントローラ2、補助ブレーキコントローラ3、その他のユニットのコントローラ9における制御信号は、社内通信ネットワーク(車内LAN)NWによって、自動省燃費運転コントロールユニット10に伝送されるように構成されている。
図9の別の実施形態におけるその他の構成及び作用効果については、図1〜図6の参考例および図7、図8の実施形態と同様である。
【0061】
上述した構成を具備した実施形態及び別の実施形態によれば、コントロールユニット10は、道路情報が無い道路を走行する場合は、車速、燃料噴射量、補助ブレーキの作動状態に基いて、走行中の道路を、下り坂の領域L1と、下り坂手前の領域Lxと、下り坂でも下り坂手前の領域でもない領域L2とに識別することができる。そして、識別したデータを対応する位置情報と関連付けてデータベース8に記憶することにより、新たな道路を走るたびに、当該道路の勾配情報が蓄積できる。したがって、2度目以降の走行の際(道路情報が有る場合)には、初回の走行時に蓄積された下り坂のデータによって、一層高度な省燃費運転ができる。
【0062】
そして、同一の道路を2回目以降に走行する際には、下り坂における走行の安全を確保した上で、減速操作(補助ブレーキの使用)を極力押さえることによって、位置エネルギーを有効に運動エネルギーに変換して、より一層、燃料消費量を節約することができる。そして、例えば上り勾配の初めにおいて、それまでに得られた運動エネルギーを活用すれば、さらなる省燃費運転が実現できる。
【0063】
次に、図10〜14を参照して、本発明のさらに別の実施形態について説明する。
図7〜図9の実施形態及び別の実施形態では、専ら降坂時において、より省燃費に走行することを狙いとしている。
それに対してさらに別の実施形態は、登坂時に、いわゆる「もたつき感」を覚えることなく、省燃費走行を実現させるためのシステムである。
【0064】
図10において、全体を符号103で示す自動省燃費運転システムは、GPSセンサ1と、エンジンコントローラ2と、車速センサ4と、データベース8と、コントロールユニット20と、コントロールユニット20を操作して自動省燃費運転を起動・停止させるON/OFFスイッチ7とを備えている。
【0065】
さらに別の実施形態の上記の各構成要素は、実施形態と同様である。
ここでデータベース8は、実施形態で用いられたデータベース8の機能に加えて、位置情報を得るに際して、GPSの衛星数が多い方のデータを優先する機能を有している。
【0066】
自動省燃費運転システム103のコントロールユニット20は、道路情報が無い道路を走行する場合は、勾配情報の一つとして、以下に記述する態様で「上り坂」を判定する。
すなわち、コントロールユニット20は、エンジンコントローラ2から得たエンジントルク率と、車速センサ4から得られる加速度とを求める。そして、エンジントルク率が閾値T1以上で、且つ、その時の加速度が所定値G1以下の場合に、上り坂と判定する。
そして「上り坂」と判定した判定結果、或いは、「上り坂」と判定しなかった判定結果を、勾配情報として、当該判定が行われた地点の位置情報と共に、データベース8で記憶するように構成されている。
ここで、エンジンのトルク率とは、その時のエンジントルクを最大エンジントルクで除した値であり、「%」で表示される。
【0067】
次に、図11のフローチャートに基づいて、さらに別の実施形態の省燃費運転の制御方法を説明する。
図11において、先ず、ステップS81で、ドライバは自動省燃費運転システムのON/OFFスイッチをONにする。
次に、GPS位置情報(緯度、経度、発信原のGPS衛星の数)を読み込み(ステップS82)、車速センサ4によって車速を読み取り(ステップS83)、エンジンコントローラ2からの情報によってエンジントルク率を(演算して)読み込む(ステップS84)。
【0068】
次のステップS85では、コントロールユニット20は、走行経験の無い(まだデータを取っていない初めての)道路か否かを判断する。既に走ったことのある(道路情報のある)道路であれば(ステップS85がNO)、ステップS86に進む。
一方、初めての道路であれば(ステップS85でYES)、今回の走行で得た勾配及びその勾配の位置をデータベース8に記憶した(ステップS92)後、ステップS82まで戻り、再びステップS82以降を繰り返す。
【0069】
ステップS86では、その時点の車速で走行し続けると、数秒後に上り坂を走行することになるか否かを判断する。その時点における車速で走行した際に、数秒後に上り坂を走行することになるのであれば(ステップS86がYES)、高負荷で且つ燃費の良いエンジン制御に切換えるように、エンジンコントローラ2に制御信号を送る(ステップS87)。
一方、その時点の車速で走行し続けても、数秒後に上り坂を走行することが無い場合には(ステップS86がNO)、ステップS82まで戻り、再びステップS82以降を繰り返す。
【0070】
次のステップS88では、エンジントルク率が閾値T1以下の状態で、所定時間(数秒間)走行したか否かを判断する。エンジントルク率が閾値T1以下の状態で、所定時間(数秒間)走行できるということは、上り坂が終わり、車両が平坦路に移ったことを意味している。
エンジントルク率が閾値T1以下の状態で、所定時間(数秒間)走行したならば(ステップS88がYES)、通常のエンジン制御に戻し(ステップS89)、ステップS90に進む。
一方、エンジントルク率が閾値T1以下の状態では、所定時間(数秒間)走行することが出来ない場合には(ステップS88がNO)、上り坂が続くものと判断して、ステップS82まで戻り、再びステップS82以降を繰り返す。
【0071】
ステップS90では、コントロールユニット20は、その時点の制御サイクルのステップS82で読み込まれたGPS位置情報を提供したGPS衛星の数が、既に記憶していた(学習していた)GPS位置情報を提供したGPS衛星数よりも多いか否かを判断する。
GPS衛星数が多い方が、GPS位置情報が正確であり、それに伴い、得られた勾配情報も正確である。そのため、既に記憶していた勾配情報に関するGPS衛星数よりも、今回の制御サイクルで読み込まれた情報を提供したGPS衛星数の方が多ければ(ステップS90がYES)、既に記憶されていた勾配情報を、今回の制御サイクルで新たに得られた勾配情報(勾配データ)に書き換える(ステップS91)。
その後、ステップS82まで戻り、再びステップS82以降を繰り返す。
【0072】
図12は、ギヤ比(横軸)と、エンジントルク率の閾値T1との関係を示している。ギヤ比は、車速をエンジン回転数で除した値に比例している。
図12において、横軸の右側の領域が高速側、すなわち高段側を示している。
図12では、ギヤ比が高速側(高段側)になるに従って、トルク率の閾値T1の値が増加している。
図13は、ギヤ比(横軸)と、加速度の閾値α1との関係を示している。
図13では、ギヤ比が高速側(高段側:図13の横軸が右側の領域)になるに従って、加速度の閾値α1の値は減少している。
【0073】
次に、図14を参照して、本発明の他の実施形態を説明する。
図10〜図13のさらに別の実施形態では、エンジンコントローラ2と、その他のユニットのコントローラ9は、それぞれ専用の回路(別個のケーブル)によって、車載コントロールユニット10に接続されている。
それに対して、図14の他の実施形態では、エンジンコントローラ2及びその他のユニットのコントローラ9が、社内通信ネットワーク(車内LAN)NWによって、自動省燃費運転コントロールユニット10に接続されている。
図14の他の実施形態におけるその他の構成及び作用効果については、図9〜図13の第3実施形態と同様である。
【0074】
上述した構成を具備したさらに別の実施形態及び他の実施形態によれば、コントロールユニット20は、道路情報が無い道路を走行する場合は、エンジンコントローラ2から得られるエンジントルク率及び車速センサ4から得られる加速度を求め、エンジントルク率が閾値T1以上で且つその時の加速度が所定値α1以下の場合に上り坂と判定し、上り勾配情報として、その時の位置情報と共に該勾配情報をデータベース8に記憶するので、新たな道路(上り勾配)を走るたびに、道路の勾配情報が蓄積される。
したがって、2度目以降の走行の際(道路情報が有る場合)には、特に上り勾配においては、蓄積された上り坂のデータによって、負荷に応じ、且つ燃費の良いエンジン制御ができる。
【0075】
図示の実施形態はあくまでも例示であり、本発明の技術的範囲を限定する趣旨の記述ではない旨を付記する。
【符号の説明】
【0076】
1・・・自車位置検出手段/GPSセンサ
2・・・エンジン制御手段/エンジンコントローラ
3・・・補助ブレーキ制御手段/補助ブレーキコントローラ
4・・・車両速度計測手段/車速センサ
5・・・補助ブレーキ作動確認手段/補助ブレーキセンサ
6・・・燃料流量検出手段/燃料流量センサ
7・・・ON・OFFスイッチ
8・・・記憶手段/データベース
10・・・自動省燃費運転制御装置/コントロールユニット
101〜104・・・自動省燃費運転システム
L1・・・下り坂の領域
Lx・・・下り坂手前の領域
L2・・・下り坂の領域と下り坂手前の領域の何れでもない領域
【特許請求の範囲】
【請求項1】
自車両の位置を検出する自車位置検出手段(1)と、エンジンの燃料噴射量を制御するエンジン制御手段(2)と、補助ブレーキの作動を制御する補助ブレーキ制御手段(3)と、補助ブレーキの作動状態を検出する補助ブレーキ作動確認手段(5)と、燃料流量を検出する燃料流量検出手段(6)と、道路勾配データおよび車両位置情報を記憶する記憶手段(8)と、省燃費運転を制御する自動省燃費運転制御手段(10)とを有する自動省燃費運転システムにおいて、前記記憶手段(8)には道路勾配データとして道路を下り坂領域(L1)と、下り坂の手前領域(Lx)と、その下り坂領域および下り坂の手前領域の何れでもないその他の領域(L2)とに識別されて記憶されており、そして前記自動省燃費運転制御手段(10)は下り坂の手前領域(Lx)に入ったか否かを判断し(S41)、下り坂の手前領域(Lx)に入ったならば、車速が第1の閾値(V1)以下の第3の閾値(V3)を超えているか否かを判断し(S42)、車速が第3の閾値(V3)を超えていれば、車速が第1の閾値(V1)以上の第2の閾値(V2)を超えているか否かを判断し(S43)、車速が第2の閾値(V2)を超えていれば燃料をカットし(S44)、補助ブレーキを作動させ、車速が第2の閾値(V2)を超えていなければ、補助ブレーキが作動しているか否かを判断し(S46)、補助ブレーキが作動していれば補助ブレーキを非作動として(S47)燃料をカットし(S48)、また補助ブレーキが作動していなければそのまま燃料をカットし(S48)、前記の車速が第3の閾値(V3)を超えていれば補助ブレーキが作動しているか否かを判断し(S49)、補助ブレーキが作動していれば、補助ブレーキを非作動として(S50)、燃料を噴射し(S51)、補助ブレーキが作動していなければそのまま燃料を噴射する(S51)機能を有することを特徴とする自動省燃費運転システム。
【請求項2】
自車両の位置を検出する自車位置検出手段(1)と、エンジンの燃料噴射量を制御するエンジン制御手段(2)と、補助ブレーキの作動を制御する補助ブレーキ制御手段(3)と、補助ブレーキの作動状態を検出する補助ブレーキ作動確認手段(5)と、燃料流量を検出する燃料流量検出手段(6)と、道路勾配データおよび車両位置情報を記憶する記憶手段(8)と、省燃費運転を制御する自動省燃費運転制御手段(10)とを有する自動省燃費運転システムにおいて、前記記憶手段(8)には道路勾配データとして道路を下り坂領域(L1)と、下り坂の手前領域(Lx)と、その下り坂領域および下り坂の手前領域の何れでもないその他の領域(L2)とに識別されて記憶されており、そして前記自動省燃費運転制御手段(10)は下り坂の手前領域(Lx)に入ったか否かを判断し(S41)、下り坂の手前領域(Lx)に入っていなければ、下り坂領域(L1)であるか否かを判断し(S52)、下り坂領域(L1)であれば車速が第1の閾値(V1)以下の第3の閾値(V3)を超えているか否かを判断し(S53)、車速が第3の閾値(V3)を超えていれば車速が第1の閾値以上の第2の閾値を超えているか否かを判断し(S54)、第2の閾値(V2)を超えていれば、燃料をカットし(S55)、そして補助ブレーキを作動させ(S56)、車速が第2の閾値(V2)を超えていなければ補助ブレーキが作動しているか否かを判断し(S57)、補助ブレーキが作動していれば補助ブレーキを非作動とし(S58)、そして燃料をカットし(S59)、補助ブレーキが作動していなければそのまま燃料をカットし(S59)、車速が第3の閾値(V3)を超えていなければ、補助ブレーキが作動しているか否かを判断し(S60)、補助ブレーキが作動していれば補助ブレーキを非作動とし(S61)、そして燃料を噴射し(S62)、補助ブレーキが作動していなければそのまま燃料を噴射する(S62)とする機能を有することを特徴とする自動省燃費運転システム。
【請求項3】
自車両の位置を検出する自車位置検出手段(1)と、エンジンの燃料噴射量を制御するエンジン制御手段(2)と、補助ブレーキの作動を制御する補助ブレーキ制御手段(3)と、補助ブレーキの作動状態を検出する補助ブレーキ作動確認手段(5)と、燃料流量を検出する燃料流量検出手段(6)と、道路勾配データおよび車両位置情報を記憶する記憶手段(8)と、省燃費運転を制御する自動省燃費運転制御手段(10)とを有する自動省燃費運転システムにおいて、前記記憶手段(8)には道路勾配データとして道路を下り坂領域(L1)と、下り坂の手前領域(Lx)と、その下り坂領域および下り坂の手前領域の何れでもないその他の領域(L2)とに識別されて記憶されており、そして前記自動省燃費運転制御手段(10)は下り坂の手前領域(Lx)に入ったか否かを判断し(S41)、下り坂の手前領域(Lx)に入っていなければ、下り坂領域(L1)であるか否かを判断し(S52)、下り坂領域(L1)でなければ車速が第1の閾値(V1)を超えているか否かを判断し(S63)、車速が第1の閾値(V1)を超えていれば車速が第1の閾値以上の第2の閾値(V2)を超えているか否かを判断し(S64)、車速が第2の閾値(V2)を超えていれば、燃料をカットし(S65)、そして補助ブレーキを作動させ(S66)、車速が第2の閾値(V2)を超えていなければ補助ブレーキが作動しているか否かを判断し(S67)、補助ブレーキが作動していれば補助ブレーキを非作動とし(S68)、そして燃料をカットし(S69)、補助ブレーキが作動していなければそのまま燃料をカットし(S69)、車速が第1の閾値(V1)を超えていなければ、補助ブレーキが作動しているか否かを判断し(S70)、補助ブレーキが作動していれば補助ブレーキを非作動とし(S71)、そして燃料を噴射し(S72)、補助ブレーキが作動していなければそのまま燃料を噴射する(S72)とする機能を有することを特徴とする自動省燃費運転システム。
【請求項1】
自車両の位置を検出する自車位置検出手段(1)と、エンジンの燃料噴射量を制御するエンジン制御手段(2)と、補助ブレーキの作動を制御する補助ブレーキ制御手段(3)と、補助ブレーキの作動状態を検出する補助ブレーキ作動確認手段(5)と、燃料流量を検出する燃料流量検出手段(6)と、道路勾配データおよび車両位置情報を記憶する記憶手段(8)と、省燃費運転を制御する自動省燃費運転制御手段(10)とを有する自動省燃費運転システムにおいて、前記記憶手段(8)には道路勾配データとして道路を下り坂領域(L1)と、下り坂の手前領域(Lx)と、その下り坂領域および下り坂の手前領域の何れでもないその他の領域(L2)とに識別されて記憶されており、そして前記自動省燃費運転制御手段(10)は下り坂の手前領域(Lx)に入ったか否かを判断し(S41)、下り坂の手前領域(Lx)に入ったならば、車速が第1の閾値(V1)以下の第3の閾値(V3)を超えているか否かを判断し(S42)、車速が第3の閾値(V3)を超えていれば、車速が第1の閾値(V1)以上の第2の閾値(V2)を超えているか否かを判断し(S43)、車速が第2の閾値(V2)を超えていれば燃料をカットし(S44)、補助ブレーキを作動させ、車速が第2の閾値(V2)を超えていなければ、補助ブレーキが作動しているか否かを判断し(S46)、補助ブレーキが作動していれば補助ブレーキを非作動として(S47)燃料をカットし(S48)、また補助ブレーキが作動していなければそのまま燃料をカットし(S48)、前記の車速が第3の閾値(V3)を超えていれば補助ブレーキが作動しているか否かを判断し(S49)、補助ブレーキが作動していれば、補助ブレーキを非作動として(S50)、燃料を噴射し(S51)、補助ブレーキが作動していなければそのまま燃料を噴射する(S51)機能を有することを特徴とする自動省燃費運転システム。
【請求項2】
自車両の位置を検出する自車位置検出手段(1)と、エンジンの燃料噴射量を制御するエンジン制御手段(2)と、補助ブレーキの作動を制御する補助ブレーキ制御手段(3)と、補助ブレーキの作動状態を検出する補助ブレーキ作動確認手段(5)と、燃料流量を検出する燃料流量検出手段(6)と、道路勾配データおよび車両位置情報を記憶する記憶手段(8)と、省燃費運転を制御する自動省燃費運転制御手段(10)とを有する自動省燃費運転システムにおいて、前記記憶手段(8)には道路勾配データとして道路を下り坂領域(L1)と、下り坂の手前領域(Lx)と、その下り坂領域および下り坂の手前領域の何れでもないその他の領域(L2)とに識別されて記憶されており、そして前記自動省燃費運転制御手段(10)は下り坂の手前領域(Lx)に入ったか否かを判断し(S41)、下り坂の手前領域(Lx)に入っていなければ、下り坂領域(L1)であるか否かを判断し(S52)、下り坂領域(L1)であれば車速が第1の閾値(V1)以下の第3の閾値(V3)を超えているか否かを判断し(S53)、車速が第3の閾値(V3)を超えていれば車速が第1の閾値以上の第2の閾値を超えているか否かを判断し(S54)、第2の閾値(V2)を超えていれば、燃料をカットし(S55)、そして補助ブレーキを作動させ(S56)、車速が第2の閾値(V2)を超えていなければ補助ブレーキが作動しているか否かを判断し(S57)、補助ブレーキが作動していれば補助ブレーキを非作動とし(S58)、そして燃料をカットし(S59)、補助ブレーキが作動していなければそのまま燃料をカットし(S59)、車速が第3の閾値(V3)を超えていなければ、補助ブレーキが作動しているか否かを判断し(S60)、補助ブレーキが作動していれば補助ブレーキを非作動とし(S61)、そして燃料を噴射し(S62)、補助ブレーキが作動していなければそのまま燃料を噴射する(S62)とする機能を有することを特徴とする自動省燃費運転システム。
【請求項3】
自車両の位置を検出する自車位置検出手段(1)と、エンジンの燃料噴射量を制御するエンジン制御手段(2)と、補助ブレーキの作動を制御する補助ブレーキ制御手段(3)と、補助ブレーキの作動状態を検出する補助ブレーキ作動確認手段(5)と、燃料流量を検出する燃料流量検出手段(6)と、道路勾配データおよび車両位置情報を記憶する記憶手段(8)と、省燃費運転を制御する自動省燃費運転制御手段(10)とを有する自動省燃費運転システムにおいて、前記記憶手段(8)には道路勾配データとして道路を下り坂領域(L1)と、下り坂の手前領域(Lx)と、その下り坂領域および下り坂の手前領域の何れでもないその他の領域(L2)とに識別されて記憶されており、そして前記自動省燃費運転制御手段(10)は下り坂の手前領域(Lx)に入ったか否かを判断し(S41)、下り坂の手前領域(Lx)に入っていなければ、下り坂領域(L1)であるか否かを判断し(S52)、下り坂領域(L1)でなければ車速が第1の閾値(V1)を超えているか否かを判断し(S63)、車速が第1の閾値(V1)を超えていれば車速が第1の閾値以上の第2の閾値(V2)を超えているか否かを判断し(S64)、車速が第2の閾値(V2)を超えていれば、燃料をカットし(S65)、そして補助ブレーキを作動させ(S66)、車速が第2の閾値(V2)を超えていなければ補助ブレーキが作動しているか否かを判断し(S67)、補助ブレーキが作動していれば補助ブレーキを非作動とし(S68)、そして燃料をカットし(S69)、補助ブレーキが作動していなければそのまま燃料をカットし(S69)、車速が第1の閾値(V1)を超えていなければ、補助ブレーキが作動しているか否かを判断し(S70)、補助ブレーキが作動していれば補助ブレーキを非作動とし(S71)、そして燃料を噴射し(S72)、補助ブレーキが作動していなければそのまま燃料を噴射する(S72)とする機能を有することを特徴とする自動省燃費運転システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2013−82447(P2013−82447A)
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願番号】特願2012−277611(P2012−277611)
【出願日】平成24年12月20日(2012.12.20)
【分割の表示】特願2007−196904(P2007−196904)の分割
【原出願日】平成19年7月30日(2007.7.30)
【出願人】(000003908)UDトラックス株式会社 (1,028)
【Fターム(参考)】
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願日】平成24年12月20日(2012.12.20)
【分割の表示】特願2007−196904(P2007−196904)の分割
【原出願日】平成19年7月30日(2007.7.30)
【出願人】(000003908)UDトラックス株式会社 (1,028)
【Fターム(参考)】
[ Back to top ]