
自動給水装置
【課題】給水圧や瞬間流量のばらつきによる便器への総吐水量の誤差を低減させることができる自動給水装置を提供する。
【解決手段】自動給水装置1は、自動給水装置本体4の通水路8dに開閉可能に設けられた電磁弁16と、自動給水装置本体の通水路の水流情報を検知する流量センサー20により検知した水流情報に基づいて電磁弁開時間T1を調整し、便器洗浄を制御するコントローラ22とを有し、コントローラ22は、電磁弁16の開弁動作開始時t1から閉弁動作開始時t3までの期間内の所定期間Δtで流量センサー20が検知した水流情報に基づいて、電磁弁16が閉弁動作を開始してから主弁体14が閉止するまでに吐水口10から流出する閉止吐水量を考慮した上で、吐水口10から便器に吐水される総吐水量が所定の吐水量になるように、電磁弁16の閉弁動作を開始する時期t3を調整し、この調整した時期に達したときに電磁弁16の閉弁動作を開始する。
【解決手段】自動給水装置1は、自動給水装置本体4の通水路8dに開閉可能に設けられた電磁弁16と、自動給水装置本体の通水路の水流情報を検知する流量センサー20により検知した水流情報に基づいて電磁弁開時間T1を調整し、便器洗浄を制御するコントローラ22とを有し、コントローラ22は、電磁弁16の開弁動作開始時t1から閉弁動作開始時t3までの期間内の所定期間Δtで流量センサー20が検知した水流情報に基づいて、電磁弁16が閉弁動作を開始してから主弁体14が閉止するまでに吐水口10から流出する閉止吐水量を考慮した上で、吐水口10から便器に吐水される総吐水量が所定の吐水量になるように、電磁弁16の閉弁動作を開始する時期t3を調整し、この調整した時期に達したときに電磁弁16の閉弁動作を開始する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自動給水装置に係り、特に、使用者の動作に基づいて便器に洗浄水を自動的に吐水する自動給水装置に関する。
【背景技術】
【0002】
従来から、使用者の動作に基づいて、水洗大便器又は水洗小便器等の水洗便器に洗浄水を自動的に吐水する自動給水装置として、自動給水装置の一部、又は便器やその周辺に設けられている人体感知センサーが便器の使用者(人体)を感知し、この使用者が便器使用後にセンサーから離れると、自動給水装置に内蔵されている開閉弁が通水路を開放し、水道等の給水源に直結した給水管から供給された洗浄水を便器に定量吐水する、いわゆる、フラッシュバルブ方式の自動給水装置が知られている。
【0003】
また、従来の自動給水装置として、特許文献1に記載されているように、流量検出手段により便器の各部へ供給される洗浄水の流量を検出し、この検出した流量から制御装置が瞬間流量を算出し、所定の給水量を供給するのに必要な時間だけ弁機構を駆動させるようになっているものも知られている。
【0004】
さらに、従来の自動給水装置として、特許文献2に記載されているように、各便器洗浄毎の洗浄水の流量を算出し、この算出した流量値と目標流量値との流量差が許容値(誤差流量)を超える場合には、吐水すべき洗浄水の流量を補正して次回の吐水を行うようになっているものも知られている。
【0005】
また、従来の自動給水装置として、特許文献3に記載されているように、通水路の水流により水車を回転させて発電する発電機が設けられ、この発電機による発電量が必要量に達するまでに流れた流量を予測し、この予測した流量に基づいて開閉弁の閉弁時期を決定するようになっているものも知られている。
【0006】
これらの従来の自動給水装置において、最適な定量吐水を行うためには、自動給水装置に供給される給水圧が一定であることが理想的であるが、自動給水装置が設置される現場や地域、自動給水装置の使用時間帯、毎回の使用状況等によって給水圧が変動してしまうのが現状である。
【0007】
特に、駅やビル等の公共施設に設置されている便器の自動給水装置においては、複数の自動給水装置が連設されているにもかかわらず、大元の給水源は一つであることがほとんどであるため、連設した自動給水装置の各々の使用状況よっても、各自動給水装置に供給される給水の圧力が大きく変動してしまい、吐水量のばらつきが少ない最適な定量吐水を行うことが難しいという問題もある。
【0008】
また、このような給水圧のばらつきによって、例えば、便器の大洗浄に要する洗浄水の総吐水量の目標値が6[L]の場合であっても、±1[L]程度の誤差が生じてしまうこともある。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開平3−90722号公報
【特許文献2】特許第4472312号公報
【特許文献3】特開2002−294778号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
しかしながら、近年の便器洗浄の節水化のニーズに伴って、便器洗浄の洗浄水の低流量化が要請されているが、自動給水装置に供給される給水圧のばらつきにより総吐水量がばらつくことは、しばしば便器洗浄の洗浄水の低流量化の妨げとなっているという問題もある。
【0011】
また、自動給水装置の開閉弁の開閉動作を時間的に制御する自動給水装置においては、給水圧のばらつきによって給水の瞬間流量も変動するため、開閉弁の開弁動作が開始してから閉弁動作が開始するまでに吐水される吐水量(いわゆる「電磁弁開時吐水量」)にも誤差が生ずるという問題がある。
【0012】
さらに、例えば、目標流量に達したときに電磁弁を閉弁させるように制御する自動給水装置においては、目標流量に達した後、電磁弁が閉弁動作を開始してから閉止(閉弁動作を完了)するまでの間に流出する吐水量(いわゆる「閉止吐水量」)が、給水圧や瞬間流量によって異なるため、便器への総吐水量にも誤差が生ずるという問題がある。
【0013】
そこで、本発明は、上述した従来技術の問題点を解決するためになされたものであり、給水圧や瞬間流量のばらつきによる便器への総吐水量の誤差を低減させることができる自動給水装置を提供することを目的としている。
【課題を解決するための手段】
【0014】
上記の目的を達成するために、本発明は、使用者の動作に基づいて便器に洗浄水を自動的に吐水する自動給水装置であって、洗浄水が給水される給水口が上流側に位置し、洗浄水を便器に吐水する吐水口が下流側に位置する通水路が形成され、この通水路に圧力室が設けられた自動給水装置本体と、上記自動給水装置本体の圧力室内に設けられ、この圧力室内の水圧に応じて上記通水路を開閉する主弁体と、上記自動給水装置本体の通水路に開閉可能に設けられ、開閉することにより上記圧力室内の水圧を変化させて上記主弁体を開閉させる電磁弁と、上記自動給水装置本体の通水路に設けられ、この通水路内の水流情報を検知する水流情報検知部と、この水流情報検知部により検知した上記水流情報に基づいて、上記電磁弁の開弁後の閉弁動作を開始する時期を調整し、便器洗浄を制御する制御部と、を有し、上記制御部は、上記電磁弁の開弁動作開始時から上記電磁弁の閉弁動作開始時までの期間内の所定期間で上記水流情報検知部が検知した上記水流情報に基づいて、上記電磁弁が閉弁動作を開始してから上記主弁体が閉止するまでに上記吐水口から流出する閉止吐水量を考慮した上で、上記吐水口から上記便器に吐水される総吐水量が所定の吐水量になるように、上記電磁弁の閉弁動作を開始する時期を調整し、この調整した時期に達したときに、上記電磁弁の閉弁動作を開始することを特徴としている。
このように構成された本発明においては、制御部により、電磁弁の開弁動作開始時から電磁弁の閉弁動作開始時までの期間内の所定期間で水流情報検知部が検知した水流情報に基づいて、電磁弁が閉弁動作を開始してから主弁体が閉止するまでに吐水口から流出する閉止吐水量を考慮した上で、吐水口から便器に吐水される総吐水量が所定の吐水量になるように、電磁弁の閉弁動作を開始する時期を調整し、この調整した時期に達したときに、電磁弁の閉弁動作を開始することができるため、自動給水装置が設置される現場や地域、自動給水装置の使用時間帯、毎回の使用状況等によって変動する給水圧や瞬間流量のばらつきによる便器への総吐水量の誤差を低減させることができる。また、電磁弁の開弁動作開始時から閉弁動作開始時までの比較的短い期間に行われる便器への瞬間的な吐水量に相当する瞬間流量のばらつきや、電磁弁が閉弁動作を開始してから主弁体が閉止するまでに吐水口から流出する閉止吐水量のばらつきの影響を受けることなく、便器への確実な定流量吐水を実現することができる。
【0015】
本発明において、好ましくは、上記所定期間は、上記電磁弁の開弁動作開始時から上記電磁弁の閉弁動作開始時までの全期間よりも短い一部期間であり、上記制御部は、上記所定期間で上記水流情報検知部が上記通水路内の流量情報を上記水流情報として検知し、上記流量情報に基づいて、上記閉止吐水量を考慮した上で、上記総吐水量が所定の吐水量となるように、上記電磁弁の閉弁動作を開始する時期を調整し、この調整した時期に達したときに、上記電磁弁の閉弁動作を開始する。
このように構成された本発明においては、制御部により、電磁弁の開弁動作開始時から電磁弁の閉弁動作開始時までの全期間よりも短い一部期間で水流情報検知部が通水路内の流量情報を水流情報として検知し、この流量情報に基づいて、電磁弁の閉弁動作を開始する時期を調整し、この調整した時期に達したときに、電磁弁の閉弁動作を開始することができる。この結果、水流情報検知部が通水路内の水流情報(流量情報)を瞬間的に検知した場合、検知結果についてばらつきが多くなるため、便器に吐水される総吐水量の誤差を縮めるのが難しいのに対し、本発明では、水流情報検知部が通水路内の流量情報を検知する際に電磁弁の開弁動作開始時から閉弁動作開始時までの期間内の一部の所定期間を利用し、この所定期間内で水流情報検知部が通水路内の流量情報を精度よく検知することができるため、この精度よく検知した流量情報に基づいて、便器に吐水される総吐水量の誤差を精度よく縮めることができる。また、上記所定期間に水流情報検知部が検知した通水路内の流量情報に基づいて、電磁弁が閉弁動作を開始してから閉止するまでに吐水口から流出する閉止吐水量を考慮することができるため、水流情報を瞬間的に測定して複雑な演算処理を行うことなく、自動給水装置が設置される現場や地域、自動給水装置の使用時間帯、毎回の使用状況等によって変動する給水圧や瞬間流量のばらつきを考慮した電磁弁の開弁時間(電磁弁の開弁動作の開始時刻から電磁弁の閉弁動作の開始時刻までの時間)を簡易な構成により調整することができる。さらに、例えば、水流情報検知部の検知手段として、通水路内の水流により回転する羽根車を備えた検知手段を用いた場合には、羽根車の回転のパルス数をカウントすることにより直接的且つ簡易に流量情報を得ることができるため、流量情報に得るための演算処理の負荷を簡易な構成により減らすことができる。
【0016】
本発明において、好ましくは、上記制御部は、上記一部期間において、上記水流情報検知部が検知した上記通水路内の流量が所定の流量に達するまでに要する時間に基づいて、上記電磁弁の閉弁動作を開始する時期を決定する。
このように構成された本発明においては、制御部により、電磁弁の開弁動作開始時から電磁弁の閉弁動作開始時までの全期間よりも短い一部期間において、水流情報検知部が検知した通水路内の流量が所定の流量に達するまでに要する時間に基づいて電磁弁の閉弁動作を開始する時期を決定することができるため、自動給水装置が設置される現場や地域、自動給水装置の使用時間帯、毎回の使用状況等によって変動する給水圧や瞬間流量のばらつきを考慮し、電磁弁が閉弁動作を開始してから主弁体が閉止するまでに吐水口から流出する閉止吐水量のばらつきの影響を受けることなく、便器への定流量吐水を簡易な構成により実現することができる。
【0017】
本発明において、好ましくは、上記制御部は、上記一部期間における所定時間内に流れた上記通水路内の流量に基づいて、上記電磁弁の閉弁動作を開始する時期を決定する。
このように構成された本発明においては、制御部により、電磁弁の開弁動作開始時から電磁弁の閉弁動作開始時までの全期間よりも短い一部期間において、所定時間内に流れた通水路内の流量に基づいて、電磁弁の閉弁動作を開始する時期を決定することができるため、自動給水装置が設置される現場や地域、自動給水装置の使用時間帯、毎回の使用状況等によって変動する給水圧や瞬間流量のばらつきを考慮し、電磁弁が閉弁動作を開始してから閉止するまでに吐水口から流出する閉止吐水量のばらつきの影響を受けることなく、便器への定流量吐水を簡易な構成により実現することができる。
【0018】
本発明において、好ましくは、上記一部期間は、上記電磁弁の開弁動作の開始時刻から所定時間経過後までの期間である。
このように構成された本発明においては、制御部により、電磁弁の開弁動作の開始時刻から所定時間経過後までの一部期間で水流情報検知部が通水路内の流量情報を水流情報として検知し、この流量情報に基づいて、電磁弁の閉弁動作を開始する時期を調整し、この調整した時期に達したときに、電磁弁の閉弁動作を開始することができる。この結果、水流情報検知部が通水路内の水流情報(流量情報)を瞬間的に検知した場合、検知結果についてばらつきが多くなるため、便器に吐水される総吐水量の誤差を縮めるのが難しいのに対し、本発明では、水流情報検知部が通水路内の流量情報を検知する際に電磁弁の開弁動作開始時から閉弁動作開始時までの期間内の一部の所定期間を利用し、この所定期間内で水流情報検知部が通水路内の流量情報を安定して検知することができるため、この安定して検知した流量情報に基づいて、便器に吐水される総吐水量の誤差を精度よく縮めることができる。また、上記所定期間に水流情報検知部が検知した通水路内の流量情報に基づいて、電磁弁が閉弁動作を開始してから主弁体が閉止するまでに吐水口から流出する閉止吐水量を考慮することができるため、水流情報を瞬間的に測定して複雑な演算処理を行うことなく、自動給水装置が設置される現場や地域、自動給水装置の使用時間帯、毎回の使用状況等によって変動する給水圧や瞬間流量のばらつきを考慮した電磁弁の開弁時間(電磁弁の開弁動作の開始時刻から電磁弁の閉弁動作の開始時刻までの時間)を簡易な構成により調整することができる。さらに、例えば、水流情報検知部の検知手段として、通水路内の水流により回転する羽根車を備えた検知手段を用いた場合には、羽根車の回転のパルス数をカウントすることにより直接的且つ簡易に流量情報を得ることができるため、流量情報に得るための演算処理の負荷を簡易な構成により減らすことができる。
【0019】
本発明において、好ましくは、上記制御部は、更に、上記総吐水量が上記所定の吐水量になっていない場合には、上記電磁弁の閉弁動作を開始する時期を補正する。
このように構成された本発明においては、吐水口から便器に吐水される総吐水量が所定の吐水量になっていない場合には、制御部により、電磁弁の閉弁動作を開始する時期を補正することができるため、便器に吐水される総吐水量の誤差をより精度よく縮めることができる。
【発明の効果】
【0020】
本発明の自動給水装置によれば、給水圧や瞬間流量のばらつきによる便器への総吐水量の誤差を低減させることができる。
【図面の簡単な説明】
【0021】
【図1】本発明の第1実施形態による自動給水装置が適用された水洗大便器を示す概略図である。
【図2】本発明の第1実施形態による自動給水装置を概略的に示すブロック図である。
【図3】本発明の第1実施形態による自動給水装置における吐水の流量特性(洗浄時間と吐水の瞬間流量との関係)を示すグラフである。
【図4】本発明の第1実施形態による自動給水装置における吐水の流動圧で比較した流量センサーの回転数特性(洗浄時間と流量センサーの回転数との関係)を示すグラフである。
【図5】本発明の第1実施形態による自動給水装置における吐水の流動圧で比較した流量センサーの積算回転数特性(洗浄時間と流量センサーの積算回転数との関係)を示すグラフである。
【図6】本発明の第1実施形態による自動給水装置における電磁弁開弁時から所定時間経過後における流量センサーの積算回転数と電磁弁開弁時間との関係を示すグラフである。
【図7】図6に示す流量センサーの積算回転数と電磁弁開弁時間との関係について補正を行うために用いられる流量センサーの総積算回転数と総吐水量との関係を示すグラフである。
【図8】本発明の第2実施形態による自動給水装置における電磁弁開弁時から流量センサーの積算回転数が所定の積算回転数に達するまでの時間と電磁弁開弁時間との関係を示すグラフである。
【発明を実施するための形態】
【0022】
以下、添付図面により、本発明の第1実施形態による自動給水装置を説明する。
図1は本発明の第1実施形態による自動給水装置が適用された水洗大便器を示す概略図であり、図2は本発明の第1実施形態による自動給水装置を概略的に示すブロック図である。
【0023】
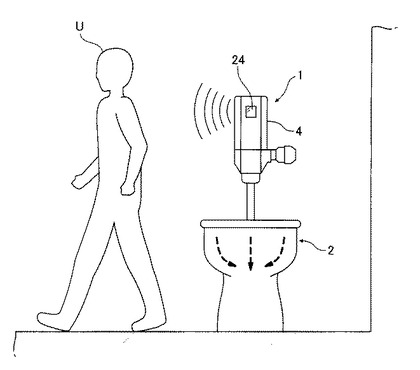
まず、図1及び図2に示すように、符号1は、本発明の第1実施形態による自動給水装置を示し、この自動給水装置1は、トイレ室内に設置された水洗大便器2の上方に設けられ、上流側端部が水道等の給水源(図示せず)に接続された自動給水装置本体4を備えている。
なお、本実施形態の自動給水装置1においては、一例として、水洗大便器に設けた形態について説明するが、水洗大便器の代わりに水洗小便器に設けてもよい。
【0024】
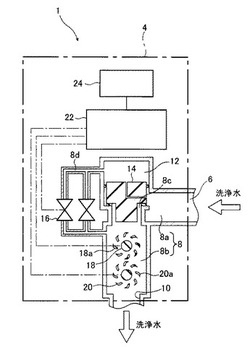
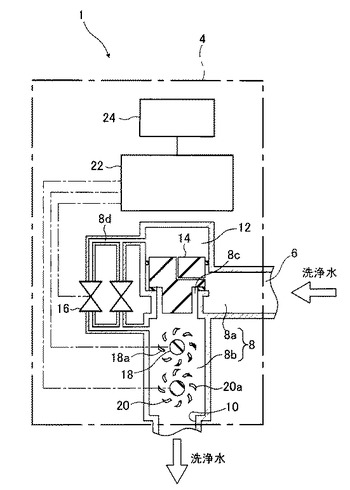
自動給水装置本体4は、給水源(図示せず)から給水栓(図示せず)を経て供給された洗浄水が給水される給水口6と、この給水口6から下流側に延びる通水路8(イ一次側通水路8a及び二次側通水路8b)と、二次側通水路8bの下流側端部に位置し且つ通水路8内の洗浄水を便器2に吐水する吐水口10と、一次側通水路8aと二次側通水路8bとの間に形成された圧力室12を備えている。
【0025】
また、自動給水装置本体4の圧力室12内には、ピストンバルブ14が設けられ、このピストンバルブ14は、圧力室12内の水圧に応じて上下動し、圧力室12の下流側の二次側通水路8bの入口8cを開閉する主弁体として機能するようになっている。
【0026】
さらに、圧力室12と二次側通水路8bとを連通させる通水路8dには、電磁弁16が設けられ、この電磁弁16が開閉することにより、圧力室12内の水圧を変化させてピストンバルブ14を開閉させるようになっている。
【0027】
つぎに、二次側通水路8bには、発電機18及び流量センサー20が設けられている。
発電機18は、二次側通水路8b内の水流により回転する羽根車16aを備えており、この羽根車16aが回転することにより発電が行われるようになっている。また、発電機18により発電された電力は、コンデンサ(図示せず)等の蓄電手段に蓄電され、コントローラ22による電磁弁16の開閉制御等に使用されるようになっている。
【0028】
また、流量センサー20は、発電機18と同様に、二次側通水路8b内の水流により回転する羽根車20aを備えており、この羽根車20aには、羽根車20aの回転数をカウントするカウンター(図示せず)が設けられている。
さらに、流量センサー20は、二次側通水路8b内の水流により回転する羽根車20aの回転数をパルスとして出力し、この出力した信号がコントローラ22に送信され、コントローラ22に内蔵されている演算回路(図示せず)によって、瞬間パルス数や積算パルス数が算出され、二次側通水路8b内の吐水の流量として換算されるようになっている。
【0029】
コントローラ22においては、その演算回路(図示せず)により、流量センサー20で検知した二次側通水路8b内の吐水の流量に基づいて、吐水に関する流速、水圧、瞬間流量、瞬間流速、瞬間水圧、積算流量、平均流速、及び平均水圧、総吐水量等の水流情報についても得ることができるようになっている。
なお、上述した水流情報のうち、特に、流量センサー20において得られる水圧に関する情報ついては、水圧がほぼ大気圧に相当するものになるため、一次側通水路8aの水圧状態を反映したものとなっている。
【0030】
また、自動給水装置本体4の一部には、水洗大便器2の使用者Uを感知する人体感知センサー24が配置されている。
自動給水装置1が水洗大便器2に吐水を行う前の状態は、電磁弁16とピストンバルブ14が閉弁し、一次側通水路8a及び圧力室12内が給水で満たされ、所定の一次水圧で止水された状態となるようになっている。そして、使用者Uが水洗大便器2に近づくと、人体感知センサー24が使用者Uを感知し、便器使用後、使用者Uが人体感知センサー24から離れると、人体感知センサー24が非検知状態となり、この非検知状態を示す信号がコントローラ22に送信されるようになっている。
さらに、この人体感知センサー24から送信された信号を受信したコントローラ22により、電磁弁16を開弁させる指令信号が電磁弁16に送信され、この指令信号を受信した電磁弁16が所定時間開弁する制御が行われるようになっている。
【0031】
また、自動給水装置1においては、電磁弁16が開弁すると、圧力室12内の圧力が解放され、水が電磁弁16を介して通水路8dから二次側通水路8bへ流れ込むようになっている。そして、電磁弁16が開弁すると、圧力室12内に水圧が掛からなくなるため、一次側通水路8a側からの一次圧力によってピストンバルブ14が上方に押し上げられ、ピストンバルブ14が二次側通水路8bの入口8cを開放し、一次側通水路8a内の給水がピストンバルブ14を介して二次側通水路8bへ流れ込み、水洗大便器2に吐水されるようになっている。
【0032】
なお、本実施形態の自動給水装置1においては、水洗大便器2の使用者Uの動作を検知する動作検知手段の一例として、人体感知センサー24が自動給水装置1の一部に組み込まれた形態について説明するが、他の動作検知手段の形態として、トイレ室内の水洗便器周辺の壁に手をかざすと感知するセンサーを設けてもよいし、タッチスイッチやタッチボタンのようなものを採用し、これらに使用者が触れたり又は押したりすることにより、動作を検知させるようにしてもよい。
【0033】
さらに、コントローラ22は、流量センサー20で検知した二次側通水路8b内の吐水の流量に基づいて得られた二次側通水路8b内の水流情報(流速、水圧、瞬間流量、瞬間流速、瞬間水圧、積算流量、平均流速、及び平均水圧等)に基づいて、電磁弁16の開弁後の閉弁動作を開始する時期を調整し、電磁弁16の開閉制御を行うことにより、二次側通水路8bから水洗大便器2に吐水される吐水量を制御して便器洗浄を制御するようになっている。
【0034】
また、コントローラ22にはメモリ(図示せず)が内蔵され、このメモリ(図示せず)には、自動給水装置1の電磁弁16の開閉制御(吐水量制御)に用いられる図6〜図8に示されている数種類のテーブル情報(詳細は後述する)が記憶されている。
【0035】
つぎに、図3〜図7により、本実施形態の自動給水装置における電磁弁の開閉制御(吐水量制御)の具体的内容について説明する。
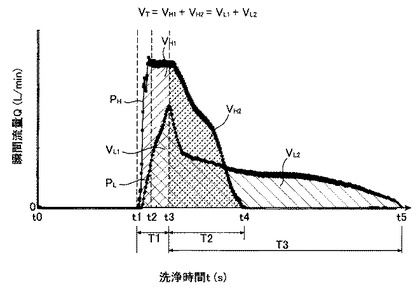
図3は本実施形態の自動給水装置における吐水の流量特性(洗浄時間と吐水の瞬間流量との関係)を示すグラフの一例である。
ここで、図3の横軸は自動給水装置1による洗浄動作が開始してから終了するまでの時間(洗浄時間t[s])を示し、図3の縦軸は自動給水装置1から水洗大便器2に吐水される吐水の瞬間流量Q[L/min]を示している。また、図3に「PH」及び「PL」でそれぞれ示す線図は、一次側通水路8aの通水の流動圧Pが高い場合(P=PH)と低い場合(P=PL)をそれぞれ示している。
【0036】
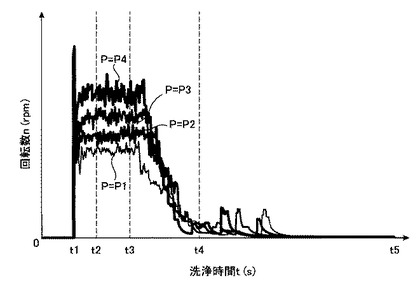
また、図4は本実施形態の本発明の第1実施形態による自動給水装置における吐水の流動圧で比較した流量センサーの回転数特性(洗浄時間と流量センサーの回転数との関係)を示すグラフの一例である。ここで、図4の横軸は自動給水装置1による洗浄動作が開始してから終了するまでの洗浄時間t[s]を示し、図4の縦軸は流量センサー20の羽根車20aの回転数n[rpm](毎分当たりにn回の回転が行われていること)を示している。
なお、図4に示す流動圧Pについては、流動圧の小さい順にP1、P2、P3、P4(P1<P2<P3<P4)で示している。
【0037】
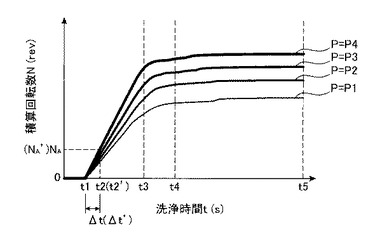
さらに、図5は本実施形態の自動給水装置における吐水の流動圧で比較した流量センサーの積算回転数特性(洗浄時間と流量センサーの積算回転数との関係)を示すグラフの一例である。ここで、図5の横軸は自動給水装置1による洗浄動作が開始してから終了するまでの洗浄時間t[s]を示し、図5の縦軸は流量センサー20の羽根車20aの積算回転数N[rev](回転した回数の合計がN回であること)を示している。
なお、図5に示す流動圧Pについては、図4と同様に、流動圧の小さい順にP1、P2、P3、P4(P1<P2<P3<P4)で示している。
【0038】
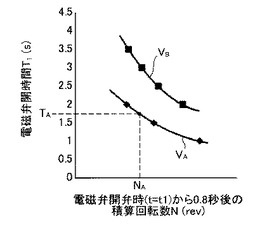
また、図6は本実施形態による自動給水装置における電磁弁開弁時から所定時間経過後における流量センサーの積算回転数と電磁弁開弁時間との関係を示すグラフの一例である。
ここで、図6の横軸は電磁弁16の開弁時(時刻t1)から0.8秒後の流量センサー20の羽根車20aの積算回転数N[rev]を示し、図6の縦軸は電磁弁16の開弁時(時刻t1)から閉弁動作開始時(時刻t3)までの時間T1(=t3−t1)(以下「電磁弁開時間T1」)を示している。また、図6に示す2つの曲線は、目標値である総吐水量VTがVAである場合と、総吐水量VTがVAよりも大きいVBである場合についてそれぞれ示している。
なお、図6に示すグラフは、本実施形態の自動給水装置における電磁弁の開閉制御(吐水量制御)に用いられるテーブル情報として、コントローラ22のメモリ(図示せず)に予め記憶されている。
【0039】
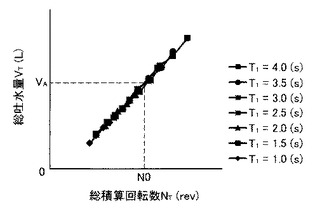
さらに、図7は、図6に示す流量センサーの総積算回転数と電磁弁開弁時間との関係について補正を行うために用いられる流量センサーの積算回転数と総吐水量との関係を示すグラフの一例であり、各電磁弁開時間T1で比較している。
ここで、図7の横軸は流量センサー20の羽根車20aの総積算回転数NT[rev]を示し、図7の縦軸は自動給水装置1から水洗大便器2に吐水される総吐水量VT[L]を示している。
なお、図7に示すグラフは、本実施形態の自動給水装置における電磁弁の開閉制御(吐水量制御)に用いられるテーブル情報として、コントローラ22のメモリ(図示せず)に予め記憶されている。
【0040】
まず、図3に示すように、便器使用後、時刻t0(=0[s])で使用者Uが人体感知センサー24から離れると、人体感知センサー24が非検知状態となり、この非検知状態を示す信号がコントローラ22に送信される。そして、この人体感知センサー24から送信された信号を受信したコントローラ22により、電磁弁16を開弁させる指令信号が電磁弁16に送信され、時刻t1(例えば、4[s])で電磁弁16の開弁動作が開始する。
【0041】
つぎに、図3に示す時刻t1からΔt秒後(例えば、0.8秒後)の時刻t2(例えば、4.8[s])までの期間(t2−t1)における流量センサー20の羽根車20aの積算回転数N[rev]が測定される。
なお、図3における時刻t3は、電磁弁16の閉弁動作が開始する時刻を示しており、時刻t4は、一次側通水路8aの通水の流動圧Pが高い場合(P=PH)においてピストンバルブ14が完全に閉止したときの時刻を示し、時刻t5は、一次側通水路8aの通水の流動圧Pが低い場合(P=PL)においてピストンバルブ14が完全に閉止したときの時刻を示している。
【0042】
つぎに、図4に示すように、時刻t1で電磁弁16の開弁動作が開始してから時刻t3で電磁弁16の閉弁動作が開始するまでの期間(電磁弁開時間T1に相当)において、各流動圧P1,P2,P3,P4における流量センサー20の羽根車20aの回転数nは、電磁弁16を通過した二次側通水路8b内の通水の瞬間流量に相当するものであるが、各流動圧P1,P2,P3,P4で非常にばらついていることがわかる。
また、流量センサー20の羽根車20aの回転数nをより安定して検知しようとする場合、羽根車20aの回転数n[rpm]が定常状態が継続しているときの所定の期間の平均値を用いることが理想的であるが、時刻t1から羽根車20aの回転数n[rpm]が定常状態になるまでにある程度の時間を要するため、例えば、電磁弁16の閉弁動作が開始されるべき時刻t3以後に羽根車20aの回転数n[rpm]が定常状態になったときには、時刻t3で電磁弁16の閉弁動作を開始するタイミングを逃す可能性がある。
【0043】
そこで、本実施形態では、図5に示すように、時刻t1で電磁弁16の開弁動作が開始してから時刻t3で電磁弁16の閉弁動作が開始するまでの期間(電磁弁開時間T1に相当)において、流量センサー20の羽根車20aの積算回転数N[rev]が、時間の経過と共にばらつくことなく、ほぼ比例的に増加する傾向となることに着目し、この時刻t1からt3までの期間における流量センサー20の羽根車20aの積算回転数N[rev]を検知することにより、電磁弁16を通過した二次側通水路8b内の通水の流量を安定して検知することができるようになっている。
【0044】
すなわち、図5に示すように、例えば、時刻t1から時刻t3までの期間内において、時刻t1(例えば、4.0[s])からΔt秒後(例えば、0.8秒後)の時刻t2(例えば、4.8[s])(t1<t2<t3)における流量センサー20の羽根車20aの積算回転数がNA[rev]として測定された場合には、一次側通水路8aの吐水の流動圧PがP1[KPa]として決定され、一次側通水路8aの水圧状態を確認することができる。
【0045】
さらに、例えば、水洗大便器2に吐水される総吐水量VTの目標値がVA[L](例えば、6[L])の場合には、図5によって決定された流量センサー20の羽根車20aの積算回転数NAを図6の総吐水量VAの線図に当てはめることにより、電磁弁開時間T1がTA[s]としてコントローラ22によって決定される。
すなわち、図5において時刻t1から時刻t2までの所定時間Δtに算出された積算回転数NAは、所定時間Δtに二次側通水路8bを流れた通水の流量、すなわち、現場の水圧状態に相当するため、この所定時間Δtに二次側通水路8bを流れた通水の流量に基づいて水圧状態を把握し、電磁弁開時間T1がTA[s]として決定されたことになる。
また、電磁弁開時間T1が決定されると、電磁弁16の閉弁動作が開始する時刻t3がt1+TAとして決定され、この時刻t3になると実際に電磁弁16の閉弁動作が開始される。
【0046】
その後、図3に示すように、一次側通水路8aの通水の流動圧Pが高い場合(P=PH)には、時刻t4でピストンバルブ14が通水路8dを完全に閉止する。
また、図3に示すように、一次側通水路8aの通水の流動圧Pが低い場合(P=PL)には、時刻t5でピストンバルブ14が通水路8dを完全に閉止する。
【0047】
ちなみに、一次側通水路8aの吐水の水圧状態を確認することにより、例えば、一次側通水路8aの吐水の流動圧の大きさが大きい程、図3に示す瞬間流量Qの大きさの最大値が相対的に大きくなる。
【0048】
また、図3に示す電磁弁16の開弁動作が開始する時刻t1から電磁弁16の閉弁動作が開始する時刻t3までの時間T1(=t3−t1)における瞬間流量Qを時間積分した量は、流動圧Pが高い場合(P=PH)と低い場合(P=PL)のそれぞれに関する二次側通水路8b内に吐水される吐水量VH1,VL1(以下「電磁弁開時吐水量VH1,VL1」)を示しているが、この電磁弁開時吐水量VH1,VL1は、一次側通水路8aの吐水の流動圧の大きさが大きい程、大きくなっている。
【0049】
さらに、図3に示す流動圧Pが高い場合(P=PH)、電磁弁16の閉弁動作が開始する時刻t3から電磁弁16が完全に閉止する時刻t4までの時間T2(=t4−t3)(以下「閉止時間T2」)における瞬間流量Qを時間積分した量は、電磁弁16が閉弁動作を開始してから閉止するまでに自動給水装置本体4の吐水口10から流出する吐水量VH2(以下「閉止吐水量VH2」)を示している。
同様に、図3に示す流動圧Pが低い場合(P=PL)、電磁弁16の閉弁動作が開始する時刻t3からピストンバルブ14が完全に閉止する時刻t5(>t4)までの時間T3(=t5−t3)(以下「閉止時間T3」)における瞬間流量Qを時間積分した量は、電磁弁16が閉弁動作を開始してからピストンバルブ14が閉止するまでに自動給水装置本体4の吐水口10から流出する吐水量VL2(以下「閉止吐水量VL2」)を示している。
【0050】
定量吐水を行う本実施形態の自動給水装置1では、吐水の流動圧の大きさにかかわらず、電磁弁開時吐水量VH1と閉止吐水量VH2との和である総吐水量VT(=VH1+VH2)、並びに電磁弁開時吐水量VL1と閉止吐水量VL2との和である総吐水量VT(=VL1+VL2)が一定となるため、流動圧Pが高い場合(P=PH)の閉止吐水量VH2は、流動圧Pが低い場合(P=PL)の閉止吐水量VL2よりも相対的に少なくなり、流動圧Pが高い場合(P=PH)のピストンバルブ14の閉止時間T2(=t4−t3)についても、流動圧Pが低い場合(P=PL)のピストンバルブ14の閉止時間T3(=t5−t3)よりも短くなる。
【0051】
さらに、総吐水量VTと総積算回転数NTの間には図7に示す関係があることから、図7を用いて、コントローラ22により、目標値の吐水量に対応する流量センサー20の羽根車20aの総積算回転数の目標値N0と実際の流量センサー20の羽根車20aの総積算回転数Nとを比較し実際の総積算回転数NTが総積算回転数の目標値N0よりも減少していた場合には、実際の総積算回転数NTが総積算回転数の目標値N0になるように電磁弁開時間T1を増加させる補正を行う。
一方、実際の総積算回転数NTが総積算回転数の目標値N0よりも増加していた場合には、実際の総積算回転数NTが総積算回転数の目標値N0になるように電磁弁開時間T1を減少させる補正を行う。
【0052】
上述した本発明の第1実施形態による自動給水装置1によれば、コントローラ22により、電磁弁16の開弁動作開始時刻t1から閉弁動作開始時刻t3までの期間内の時刻t1から時刻t2までの所定期間Δtにおいて流量センサー20が検知した水流情報である羽根車20aの積算回転数N[rev]に基づいて、電磁弁16が閉弁動作を開始してからピストンバルブ14が閉止するまでに吐水口10から流出する閉止吐水量VH2,VL2を考慮した上で、吐水口10から水洗大便器2に吐水される総吐水量VTが所定の総吐水量VA,VBになるように、電磁弁開時間T1並びに電磁弁16の閉弁動作を開始する時刻t3を調整し、この調整した時刻t3に達したときに、電磁弁16の閉弁動作を開始することができる。この結果、自動給水装置1が設置される現場や地域、自動給水装置の使用時間帯、毎回の使用状況等によって変動する給水圧や瞬間流量のばらつきによる水洗大便器2への総吐水量VTの誤差を低減させることができる。
また、電磁弁16の開弁動作開始時刻t1から閉弁動作開始時刻t3までの期間内の時刻t1から時刻t2までの所定期間Δtである比較的短い期間を利用し、この期間Δtで流量センサー20の羽根車20aの積算回転数N[rev]を検知することにより、この所定期間Δtに行われる水洗大便器2への瞬間的な吐水量に相当する瞬間流量のばらつきや、電磁弁16が閉弁動作を開始してから閉止するまでに吐水口10から流出する閉止吐水量VH2,VL2のばらつきの影響を受けることなく、水洗大便器2への定流量吐水を実現することができる。
【0053】
さらに、本実施形態による自動給水装置1によれば、コントローラ22により、電磁弁16の開弁動作開始時刻t1から閉弁動作開始時刻t3までの全期間よりも短い一部期間(時刻t1から時刻t2までの所定期間Δt)で流量センサー20の羽根車20aの積算回転数N[rev]を検知することにより、この積算回転数N[rev]に相当する二次側通水路8b内の流量に基づいて、電磁弁開時間T1を決定することができる。
また、時刻t1で電磁弁16の開弁動作が開始してから時刻t3で電磁弁16の閉弁動作が開始するまでの期間において、流量センサー20が二次側通水路8b内の水流情報(流量情報)を瞬間的に検知した場合には、図4に示すように、各流動圧P1,P2,P3,P4における流量センサー20の羽根車20aの回転数n(電磁弁16を通過した二次側通水路8b内の通水の瞬間流量に相当)が、各流動圧P1,P2,P3,P4で非常にばらついており、水洗大便器2に吐水される総吐水量VTの誤差を縮めるのが難しい状況であるにもかかわらず、本実施形態では、電磁弁16の開弁動作開始時刻t1から閉弁動作開始時刻t3までの期間内の時刻t1から時刻t2までの比較的短い所定期間Δtにおいても、時間の経過と共にばらつくことなく、ほぼ比例的に増加する流量センサー20の羽根車20aの積算回転数N[rev]を安定して精度よく検知することができるため、水洗大便器2に吐水される総吐水量VTの誤差を精度よく縮めることができる。
さらに、所定期間Δtに流量センサー20が検知した二次側通水路8b内の流量情報に基づいて電磁弁開時間T1を決定することができ、電磁弁16が閉弁動作を開始してから閉止するまでに吐水口10から流出する閉止吐水量VH2,VL2を容易に考慮することができる。この結果、水流情報を瞬間的に測定して複雑な演算処理を行うことなく、自動給水装置1が設置される現場や地域、自動給水装置1の使用時間帯、毎回の使用状況等によって変動する給水圧や瞬間流量のばらつきを考慮した電磁弁開時間T1を簡易な構成により調整することができる。
また、二次側通水路8b内の水流により回転する羽根車20aを備えた流量センサー20が用いられているため、羽根車20aの回転のパルス数をカウントすることにより直接的且つ簡易に流量情報を得ることができ、流量情報に得るための演算処理の負荷を簡易な構成により減らすことができる。
【0054】
さらに、本実施形態による自動給水装置1によれば、流量センサー20で検知した二次側通水路8b内の吐水の流量情報に基づいて総吐水量VTが目標値の総吐水量になっていない場合には、図7を用いて、コントローラ22により、目標値の総吐水量に対応する流量センサー20の羽根車20aの総積算回転数の目標値N0と実際の流量センサー20の羽根車20aの総積算回転数NTが一致するように電磁弁開時間T1を補正することができるため、水洗大便器2に吐水される総吐水量VTの誤差をより精度よく縮めることができる。
【0055】
つぎに、図5及び図8を参照して、本発明の第2実施形態による自動給水装置における電磁弁の開閉制御(吐水量制御)について説明する。
なお、本発明の第2実施形態による自動給水装置においては、上述した第1実施形態による自動給水装置1と構成が同一であるが、電磁弁16の開閉制御(吐水量制御)の内容の一部が第1実施形態における制御内容と異なっているため、以下、制御内容の異なる部分のみについて説明を行い、これ以外の第1実施形態の制御内容と共通する部分については、説明を省略する。
【0056】
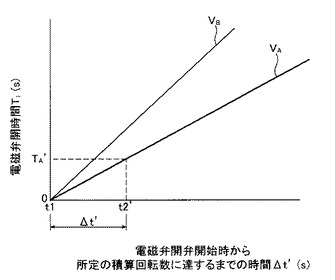
図8は、本発明の第2実施形態による自動給水装置における電磁弁開弁時から流量センサーの積算回転数が所定の積算回転数に達するまでの時間と電磁弁開弁時間との関係を示すグラフである。
ここで、図8の横軸は、電磁弁16の開弁時(時刻t1)に流量センサー20の羽根車20aの回転が開始してから、羽根車20aの積算回転数Nが20回転に達したときの時間t[s]を示し、図8の縦軸は、電磁弁開時間T1を示している。
また、図8に示す2つの線は、目標値である総吐水量VTがVAである場合と、総吐水量VTがVAよりも大きいVBである場合についてそれぞれ示している。
【0057】
まず、図5に示すように、本発明の第2実施形態による自働給水装置においては、時刻t1から時刻t3までの期間内において、時刻t1で電磁弁16の開弁動作が開始し、流量センサー20の羽根車20aの積算回転数NがNA’[rev](例えば、20回転)として測定されたときの時間Δt’を測定し、この積算回転数NA’と時間Δt’を図5に当てはめることにより、時刻t1で流量センサー20の羽根車20aの回転が開始してから所定の積算回転数NA’(例えば、20回転)に達する時刻t2’(t2’<t3)までの時間Δt’における吐水の流動圧Pを決定し、水圧状態を確認する。
【0058】
つぎに、例えば、水洗大便器2に吐水される総吐水量VTの目標値がVA[L](例えば、6[L])の場合には、図5によって決定された時間Δt’を図8の総吐水量VAの線図に当てはめることにより、電磁弁開時間T1がTA’[s]としてコントローラ22によって決定される。
すなわち、図5において時刻t1から時刻t2’までの所定時間Δt’に算出された積算回転数NA’は、所定時間Δt’に二次側通水路8bを流れた通水の流量に相当するため、この積算回転数NA’に相当する流量に達するまでに要する所定時間Δt’に基づいて電磁弁開時間T1がTA’[s]として決定されたことになる。
また、電磁弁開時間T1が決定されると、電磁弁16の閉弁動作が開始する時刻t3がt1+TA’として決定され、この時刻t3になると実際に電磁弁16の閉弁動作が開始される。
【0059】
上述した本発明の第2実施形態による自動給水装置によれば、電磁弁16の開弁動作開始時刻t1から閉弁動作開始時刻t3までの全期間よりも短い一部期間(時刻t1から時刻t2’までの所定期間Δt’)において、時刻t1で電磁弁16の開弁動作が開始してから、流量センサー20の羽根車20aの積算回転数NがNA’[rev]にするまでの時間、すなわち、二次側通水路8b内の流量が所定の流量に達するまでに要する時間に基づいて電磁弁開時間T1を決定することができる。この結果、自動給水装置1が設置される現場や地域、自動給水装置1の使用時間帯、毎回の使用状況等によって変動する給水圧や瞬間流量のばらつきを考慮し、電磁弁16が閉弁動作を開始してから閉止するまでに吐水口10から流出する閉止吐水量VH2,VL2のばらつきの影響を受けることなく、水洗大便器2への定流量吐水を簡易な構成により実現することができる。
【0060】
なお、上述した本発明の第1実施形態及び第2実施形態による自動給水装置の電磁弁の開閉制御(吐水量制御)においては、電磁弁16の開弁動作開始時刻t1から閉弁動作開始時刻t3までの期間内の時刻t1から時刻t2,t2’までの比較的短い一部の所定期間Δtを利用することにより、電磁弁開時間T1を決定する例について説明したが、時刻t1より後で且つ時刻t3よりも前の途中期間を利用して電磁弁開時間T1を決定してもよい。
【符号の説明】
【0061】
1 自動給水装置
2 水洗大便器
4 自動給水装置本体
6 給水口
8 通水路
8a 一次側通水路
8b 二次側通水路
8c 二次側通水路の入口
8d 通水路
10 吐水口
12 圧力室
14 ピストンバルブ(主弁体)
16 電磁弁
18 発電機
18a 羽根車
20 流量センサー(水流情報検知部)
20a 羽根車
22 コントローラ(制御部)
24 人体感知センサー
【技術分野】
【0001】
本発明は、自動給水装置に係り、特に、使用者の動作に基づいて便器に洗浄水を自動的に吐水する自動給水装置に関する。
【背景技術】
【0002】
従来から、使用者の動作に基づいて、水洗大便器又は水洗小便器等の水洗便器に洗浄水を自動的に吐水する自動給水装置として、自動給水装置の一部、又は便器やその周辺に設けられている人体感知センサーが便器の使用者(人体)を感知し、この使用者が便器使用後にセンサーから離れると、自動給水装置に内蔵されている開閉弁が通水路を開放し、水道等の給水源に直結した給水管から供給された洗浄水を便器に定量吐水する、いわゆる、フラッシュバルブ方式の自動給水装置が知られている。
【0003】
また、従来の自動給水装置として、特許文献1に記載されているように、流量検出手段により便器の各部へ供給される洗浄水の流量を検出し、この検出した流量から制御装置が瞬間流量を算出し、所定の給水量を供給するのに必要な時間だけ弁機構を駆動させるようになっているものも知られている。
【0004】
さらに、従来の自動給水装置として、特許文献2に記載されているように、各便器洗浄毎の洗浄水の流量を算出し、この算出した流量値と目標流量値との流量差が許容値(誤差流量)を超える場合には、吐水すべき洗浄水の流量を補正して次回の吐水を行うようになっているものも知られている。
【0005】
また、従来の自動給水装置として、特許文献3に記載されているように、通水路の水流により水車を回転させて発電する発電機が設けられ、この発電機による発電量が必要量に達するまでに流れた流量を予測し、この予測した流量に基づいて開閉弁の閉弁時期を決定するようになっているものも知られている。
【0006】
これらの従来の自動給水装置において、最適な定量吐水を行うためには、自動給水装置に供給される給水圧が一定であることが理想的であるが、自動給水装置が設置される現場や地域、自動給水装置の使用時間帯、毎回の使用状況等によって給水圧が変動してしまうのが現状である。
【0007】
特に、駅やビル等の公共施設に設置されている便器の自動給水装置においては、複数の自動給水装置が連設されているにもかかわらず、大元の給水源は一つであることがほとんどであるため、連設した自動給水装置の各々の使用状況よっても、各自動給水装置に供給される給水の圧力が大きく変動してしまい、吐水量のばらつきが少ない最適な定量吐水を行うことが難しいという問題もある。
【0008】
また、このような給水圧のばらつきによって、例えば、便器の大洗浄に要する洗浄水の総吐水量の目標値が6[L]の場合であっても、±1[L]程度の誤差が生じてしまうこともある。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開平3−90722号公報
【特許文献2】特許第4472312号公報
【特許文献3】特開2002−294778号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
しかしながら、近年の便器洗浄の節水化のニーズに伴って、便器洗浄の洗浄水の低流量化が要請されているが、自動給水装置に供給される給水圧のばらつきにより総吐水量がばらつくことは、しばしば便器洗浄の洗浄水の低流量化の妨げとなっているという問題もある。
【0011】
また、自動給水装置の開閉弁の開閉動作を時間的に制御する自動給水装置においては、給水圧のばらつきによって給水の瞬間流量も変動するため、開閉弁の開弁動作が開始してから閉弁動作が開始するまでに吐水される吐水量(いわゆる「電磁弁開時吐水量」)にも誤差が生ずるという問題がある。
【0012】
さらに、例えば、目標流量に達したときに電磁弁を閉弁させるように制御する自動給水装置においては、目標流量に達した後、電磁弁が閉弁動作を開始してから閉止(閉弁動作を完了)するまでの間に流出する吐水量(いわゆる「閉止吐水量」)が、給水圧や瞬間流量によって異なるため、便器への総吐水量にも誤差が生ずるという問題がある。
【0013】
そこで、本発明は、上述した従来技術の問題点を解決するためになされたものであり、給水圧や瞬間流量のばらつきによる便器への総吐水量の誤差を低減させることができる自動給水装置を提供することを目的としている。
【課題を解決するための手段】
【0014】
上記の目的を達成するために、本発明は、使用者の動作に基づいて便器に洗浄水を自動的に吐水する自動給水装置であって、洗浄水が給水される給水口が上流側に位置し、洗浄水を便器に吐水する吐水口が下流側に位置する通水路が形成され、この通水路に圧力室が設けられた自動給水装置本体と、上記自動給水装置本体の圧力室内に設けられ、この圧力室内の水圧に応じて上記通水路を開閉する主弁体と、上記自動給水装置本体の通水路に開閉可能に設けられ、開閉することにより上記圧力室内の水圧を変化させて上記主弁体を開閉させる電磁弁と、上記自動給水装置本体の通水路に設けられ、この通水路内の水流情報を検知する水流情報検知部と、この水流情報検知部により検知した上記水流情報に基づいて、上記電磁弁の開弁後の閉弁動作を開始する時期を調整し、便器洗浄を制御する制御部と、を有し、上記制御部は、上記電磁弁の開弁動作開始時から上記電磁弁の閉弁動作開始時までの期間内の所定期間で上記水流情報検知部が検知した上記水流情報に基づいて、上記電磁弁が閉弁動作を開始してから上記主弁体が閉止するまでに上記吐水口から流出する閉止吐水量を考慮した上で、上記吐水口から上記便器に吐水される総吐水量が所定の吐水量になるように、上記電磁弁の閉弁動作を開始する時期を調整し、この調整した時期に達したときに、上記電磁弁の閉弁動作を開始することを特徴としている。
このように構成された本発明においては、制御部により、電磁弁の開弁動作開始時から電磁弁の閉弁動作開始時までの期間内の所定期間で水流情報検知部が検知した水流情報に基づいて、電磁弁が閉弁動作を開始してから主弁体が閉止するまでに吐水口から流出する閉止吐水量を考慮した上で、吐水口から便器に吐水される総吐水量が所定の吐水量になるように、電磁弁の閉弁動作を開始する時期を調整し、この調整した時期に達したときに、電磁弁の閉弁動作を開始することができるため、自動給水装置が設置される現場や地域、自動給水装置の使用時間帯、毎回の使用状況等によって変動する給水圧や瞬間流量のばらつきによる便器への総吐水量の誤差を低減させることができる。また、電磁弁の開弁動作開始時から閉弁動作開始時までの比較的短い期間に行われる便器への瞬間的な吐水量に相当する瞬間流量のばらつきや、電磁弁が閉弁動作を開始してから主弁体が閉止するまでに吐水口から流出する閉止吐水量のばらつきの影響を受けることなく、便器への確実な定流量吐水を実現することができる。
【0015】
本発明において、好ましくは、上記所定期間は、上記電磁弁の開弁動作開始時から上記電磁弁の閉弁動作開始時までの全期間よりも短い一部期間であり、上記制御部は、上記所定期間で上記水流情報検知部が上記通水路内の流量情報を上記水流情報として検知し、上記流量情報に基づいて、上記閉止吐水量を考慮した上で、上記総吐水量が所定の吐水量となるように、上記電磁弁の閉弁動作を開始する時期を調整し、この調整した時期に達したときに、上記電磁弁の閉弁動作を開始する。
このように構成された本発明においては、制御部により、電磁弁の開弁動作開始時から電磁弁の閉弁動作開始時までの全期間よりも短い一部期間で水流情報検知部が通水路内の流量情報を水流情報として検知し、この流量情報に基づいて、電磁弁の閉弁動作を開始する時期を調整し、この調整した時期に達したときに、電磁弁の閉弁動作を開始することができる。この結果、水流情報検知部が通水路内の水流情報(流量情報)を瞬間的に検知した場合、検知結果についてばらつきが多くなるため、便器に吐水される総吐水量の誤差を縮めるのが難しいのに対し、本発明では、水流情報検知部が通水路内の流量情報を検知する際に電磁弁の開弁動作開始時から閉弁動作開始時までの期間内の一部の所定期間を利用し、この所定期間内で水流情報検知部が通水路内の流量情報を精度よく検知することができるため、この精度よく検知した流量情報に基づいて、便器に吐水される総吐水量の誤差を精度よく縮めることができる。また、上記所定期間に水流情報検知部が検知した通水路内の流量情報に基づいて、電磁弁が閉弁動作を開始してから閉止するまでに吐水口から流出する閉止吐水量を考慮することができるため、水流情報を瞬間的に測定して複雑な演算処理を行うことなく、自動給水装置が設置される現場や地域、自動給水装置の使用時間帯、毎回の使用状況等によって変動する給水圧や瞬間流量のばらつきを考慮した電磁弁の開弁時間(電磁弁の開弁動作の開始時刻から電磁弁の閉弁動作の開始時刻までの時間)を簡易な構成により調整することができる。さらに、例えば、水流情報検知部の検知手段として、通水路内の水流により回転する羽根車を備えた検知手段を用いた場合には、羽根車の回転のパルス数をカウントすることにより直接的且つ簡易に流量情報を得ることができるため、流量情報に得るための演算処理の負荷を簡易な構成により減らすことができる。
【0016】
本発明において、好ましくは、上記制御部は、上記一部期間において、上記水流情報検知部が検知した上記通水路内の流量が所定の流量に達するまでに要する時間に基づいて、上記電磁弁の閉弁動作を開始する時期を決定する。
このように構成された本発明においては、制御部により、電磁弁の開弁動作開始時から電磁弁の閉弁動作開始時までの全期間よりも短い一部期間において、水流情報検知部が検知した通水路内の流量が所定の流量に達するまでに要する時間に基づいて電磁弁の閉弁動作を開始する時期を決定することができるため、自動給水装置が設置される現場や地域、自動給水装置の使用時間帯、毎回の使用状況等によって変動する給水圧や瞬間流量のばらつきを考慮し、電磁弁が閉弁動作を開始してから主弁体が閉止するまでに吐水口から流出する閉止吐水量のばらつきの影響を受けることなく、便器への定流量吐水を簡易な構成により実現することができる。
【0017】
本発明において、好ましくは、上記制御部は、上記一部期間における所定時間内に流れた上記通水路内の流量に基づいて、上記電磁弁の閉弁動作を開始する時期を決定する。
このように構成された本発明においては、制御部により、電磁弁の開弁動作開始時から電磁弁の閉弁動作開始時までの全期間よりも短い一部期間において、所定時間内に流れた通水路内の流量に基づいて、電磁弁の閉弁動作を開始する時期を決定することができるため、自動給水装置が設置される現場や地域、自動給水装置の使用時間帯、毎回の使用状況等によって変動する給水圧や瞬間流量のばらつきを考慮し、電磁弁が閉弁動作を開始してから閉止するまでに吐水口から流出する閉止吐水量のばらつきの影響を受けることなく、便器への定流量吐水を簡易な構成により実現することができる。
【0018】
本発明において、好ましくは、上記一部期間は、上記電磁弁の開弁動作の開始時刻から所定時間経過後までの期間である。
このように構成された本発明においては、制御部により、電磁弁の開弁動作の開始時刻から所定時間経過後までの一部期間で水流情報検知部が通水路内の流量情報を水流情報として検知し、この流量情報に基づいて、電磁弁の閉弁動作を開始する時期を調整し、この調整した時期に達したときに、電磁弁の閉弁動作を開始することができる。この結果、水流情報検知部が通水路内の水流情報(流量情報)を瞬間的に検知した場合、検知結果についてばらつきが多くなるため、便器に吐水される総吐水量の誤差を縮めるのが難しいのに対し、本発明では、水流情報検知部が通水路内の流量情報を検知する際に電磁弁の開弁動作開始時から閉弁動作開始時までの期間内の一部の所定期間を利用し、この所定期間内で水流情報検知部が通水路内の流量情報を安定して検知することができるため、この安定して検知した流量情報に基づいて、便器に吐水される総吐水量の誤差を精度よく縮めることができる。また、上記所定期間に水流情報検知部が検知した通水路内の流量情報に基づいて、電磁弁が閉弁動作を開始してから主弁体が閉止するまでに吐水口から流出する閉止吐水量を考慮することができるため、水流情報を瞬間的に測定して複雑な演算処理を行うことなく、自動給水装置が設置される現場や地域、自動給水装置の使用時間帯、毎回の使用状況等によって変動する給水圧や瞬間流量のばらつきを考慮した電磁弁の開弁時間(電磁弁の開弁動作の開始時刻から電磁弁の閉弁動作の開始時刻までの時間)を簡易な構成により調整することができる。さらに、例えば、水流情報検知部の検知手段として、通水路内の水流により回転する羽根車を備えた検知手段を用いた場合には、羽根車の回転のパルス数をカウントすることにより直接的且つ簡易に流量情報を得ることができるため、流量情報に得るための演算処理の負荷を簡易な構成により減らすことができる。
【0019】
本発明において、好ましくは、上記制御部は、更に、上記総吐水量が上記所定の吐水量になっていない場合には、上記電磁弁の閉弁動作を開始する時期を補正する。
このように構成された本発明においては、吐水口から便器に吐水される総吐水量が所定の吐水量になっていない場合には、制御部により、電磁弁の閉弁動作を開始する時期を補正することができるため、便器に吐水される総吐水量の誤差をより精度よく縮めることができる。
【発明の効果】
【0020】
本発明の自動給水装置によれば、給水圧や瞬間流量のばらつきによる便器への総吐水量の誤差を低減させることができる。
【図面の簡単な説明】
【0021】
【図1】本発明の第1実施形態による自動給水装置が適用された水洗大便器を示す概略図である。
【図2】本発明の第1実施形態による自動給水装置を概略的に示すブロック図である。
【図3】本発明の第1実施形態による自動給水装置における吐水の流量特性(洗浄時間と吐水の瞬間流量との関係)を示すグラフである。
【図4】本発明の第1実施形態による自動給水装置における吐水の流動圧で比較した流量センサーの回転数特性(洗浄時間と流量センサーの回転数との関係)を示すグラフである。
【図5】本発明の第1実施形態による自動給水装置における吐水の流動圧で比較した流量センサーの積算回転数特性(洗浄時間と流量センサーの積算回転数との関係)を示すグラフである。
【図6】本発明の第1実施形態による自動給水装置における電磁弁開弁時から所定時間経過後における流量センサーの積算回転数と電磁弁開弁時間との関係を示すグラフである。
【図7】図6に示す流量センサーの積算回転数と電磁弁開弁時間との関係について補正を行うために用いられる流量センサーの総積算回転数と総吐水量との関係を示すグラフである。
【図8】本発明の第2実施形態による自動給水装置における電磁弁開弁時から流量センサーの積算回転数が所定の積算回転数に達するまでの時間と電磁弁開弁時間との関係を示すグラフである。
【発明を実施するための形態】
【0022】
以下、添付図面により、本発明の第1実施形態による自動給水装置を説明する。
図1は本発明の第1実施形態による自動給水装置が適用された水洗大便器を示す概略図であり、図2は本発明の第1実施形態による自動給水装置を概略的に示すブロック図である。
【0023】
まず、図1及び図2に示すように、符号1は、本発明の第1実施形態による自動給水装置を示し、この自動給水装置1は、トイレ室内に設置された水洗大便器2の上方に設けられ、上流側端部が水道等の給水源(図示せず)に接続された自動給水装置本体4を備えている。
なお、本実施形態の自動給水装置1においては、一例として、水洗大便器に設けた形態について説明するが、水洗大便器の代わりに水洗小便器に設けてもよい。
【0024】
自動給水装置本体4は、給水源(図示せず)から給水栓(図示せず)を経て供給された洗浄水が給水される給水口6と、この給水口6から下流側に延びる通水路8(イ一次側通水路8a及び二次側通水路8b)と、二次側通水路8bの下流側端部に位置し且つ通水路8内の洗浄水を便器2に吐水する吐水口10と、一次側通水路8aと二次側通水路8bとの間に形成された圧力室12を備えている。
【0025】
また、自動給水装置本体4の圧力室12内には、ピストンバルブ14が設けられ、このピストンバルブ14は、圧力室12内の水圧に応じて上下動し、圧力室12の下流側の二次側通水路8bの入口8cを開閉する主弁体として機能するようになっている。
【0026】
さらに、圧力室12と二次側通水路8bとを連通させる通水路8dには、電磁弁16が設けられ、この電磁弁16が開閉することにより、圧力室12内の水圧を変化させてピストンバルブ14を開閉させるようになっている。
【0027】
つぎに、二次側通水路8bには、発電機18及び流量センサー20が設けられている。
発電機18は、二次側通水路8b内の水流により回転する羽根車16aを備えており、この羽根車16aが回転することにより発電が行われるようになっている。また、発電機18により発電された電力は、コンデンサ(図示せず)等の蓄電手段に蓄電され、コントローラ22による電磁弁16の開閉制御等に使用されるようになっている。
【0028】
また、流量センサー20は、発電機18と同様に、二次側通水路8b内の水流により回転する羽根車20aを備えており、この羽根車20aには、羽根車20aの回転数をカウントするカウンター(図示せず)が設けられている。
さらに、流量センサー20は、二次側通水路8b内の水流により回転する羽根車20aの回転数をパルスとして出力し、この出力した信号がコントローラ22に送信され、コントローラ22に内蔵されている演算回路(図示せず)によって、瞬間パルス数や積算パルス数が算出され、二次側通水路8b内の吐水の流量として換算されるようになっている。
【0029】
コントローラ22においては、その演算回路(図示せず)により、流量センサー20で検知した二次側通水路8b内の吐水の流量に基づいて、吐水に関する流速、水圧、瞬間流量、瞬間流速、瞬間水圧、積算流量、平均流速、及び平均水圧、総吐水量等の水流情報についても得ることができるようになっている。
なお、上述した水流情報のうち、特に、流量センサー20において得られる水圧に関する情報ついては、水圧がほぼ大気圧に相当するものになるため、一次側通水路8aの水圧状態を反映したものとなっている。
【0030】
また、自動給水装置本体4の一部には、水洗大便器2の使用者Uを感知する人体感知センサー24が配置されている。
自動給水装置1が水洗大便器2に吐水を行う前の状態は、電磁弁16とピストンバルブ14が閉弁し、一次側通水路8a及び圧力室12内が給水で満たされ、所定の一次水圧で止水された状態となるようになっている。そして、使用者Uが水洗大便器2に近づくと、人体感知センサー24が使用者Uを感知し、便器使用後、使用者Uが人体感知センサー24から離れると、人体感知センサー24が非検知状態となり、この非検知状態を示す信号がコントローラ22に送信されるようになっている。
さらに、この人体感知センサー24から送信された信号を受信したコントローラ22により、電磁弁16を開弁させる指令信号が電磁弁16に送信され、この指令信号を受信した電磁弁16が所定時間開弁する制御が行われるようになっている。
【0031】
また、自動給水装置1においては、電磁弁16が開弁すると、圧力室12内の圧力が解放され、水が電磁弁16を介して通水路8dから二次側通水路8bへ流れ込むようになっている。そして、電磁弁16が開弁すると、圧力室12内に水圧が掛からなくなるため、一次側通水路8a側からの一次圧力によってピストンバルブ14が上方に押し上げられ、ピストンバルブ14が二次側通水路8bの入口8cを開放し、一次側通水路8a内の給水がピストンバルブ14を介して二次側通水路8bへ流れ込み、水洗大便器2に吐水されるようになっている。
【0032】
なお、本実施形態の自動給水装置1においては、水洗大便器2の使用者Uの動作を検知する動作検知手段の一例として、人体感知センサー24が自動給水装置1の一部に組み込まれた形態について説明するが、他の動作検知手段の形態として、トイレ室内の水洗便器周辺の壁に手をかざすと感知するセンサーを設けてもよいし、タッチスイッチやタッチボタンのようなものを採用し、これらに使用者が触れたり又は押したりすることにより、動作を検知させるようにしてもよい。
【0033】
さらに、コントローラ22は、流量センサー20で検知した二次側通水路8b内の吐水の流量に基づいて得られた二次側通水路8b内の水流情報(流速、水圧、瞬間流量、瞬間流速、瞬間水圧、積算流量、平均流速、及び平均水圧等)に基づいて、電磁弁16の開弁後の閉弁動作を開始する時期を調整し、電磁弁16の開閉制御を行うことにより、二次側通水路8bから水洗大便器2に吐水される吐水量を制御して便器洗浄を制御するようになっている。
【0034】
また、コントローラ22にはメモリ(図示せず)が内蔵され、このメモリ(図示せず)には、自動給水装置1の電磁弁16の開閉制御(吐水量制御)に用いられる図6〜図8に示されている数種類のテーブル情報(詳細は後述する)が記憶されている。
【0035】
つぎに、図3〜図7により、本実施形態の自動給水装置における電磁弁の開閉制御(吐水量制御)の具体的内容について説明する。
図3は本実施形態の自動給水装置における吐水の流量特性(洗浄時間と吐水の瞬間流量との関係)を示すグラフの一例である。
ここで、図3の横軸は自動給水装置1による洗浄動作が開始してから終了するまでの時間(洗浄時間t[s])を示し、図3の縦軸は自動給水装置1から水洗大便器2に吐水される吐水の瞬間流量Q[L/min]を示している。また、図3に「PH」及び「PL」でそれぞれ示す線図は、一次側通水路8aの通水の流動圧Pが高い場合(P=PH)と低い場合(P=PL)をそれぞれ示している。
【0036】
また、図4は本実施形態の本発明の第1実施形態による自動給水装置における吐水の流動圧で比較した流量センサーの回転数特性(洗浄時間と流量センサーの回転数との関係)を示すグラフの一例である。ここで、図4の横軸は自動給水装置1による洗浄動作が開始してから終了するまでの洗浄時間t[s]を示し、図4の縦軸は流量センサー20の羽根車20aの回転数n[rpm](毎分当たりにn回の回転が行われていること)を示している。
なお、図4に示す流動圧Pについては、流動圧の小さい順にP1、P2、P3、P4(P1<P2<P3<P4)で示している。
【0037】
さらに、図5は本実施形態の自動給水装置における吐水の流動圧で比較した流量センサーの積算回転数特性(洗浄時間と流量センサーの積算回転数との関係)を示すグラフの一例である。ここで、図5の横軸は自動給水装置1による洗浄動作が開始してから終了するまでの洗浄時間t[s]を示し、図5の縦軸は流量センサー20の羽根車20aの積算回転数N[rev](回転した回数の合計がN回であること)を示している。
なお、図5に示す流動圧Pについては、図4と同様に、流動圧の小さい順にP1、P2、P3、P4(P1<P2<P3<P4)で示している。
【0038】
また、図6は本実施形態による自動給水装置における電磁弁開弁時から所定時間経過後における流量センサーの積算回転数と電磁弁開弁時間との関係を示すグラフの一例である。
ここで、図6の横軸は電磁弁16の開弁時(時刻t1)から0.8秒後の流量センサー20の羽根車20aの積算回転数N[rev]を示し、図6の縦軸は電磁弁16の開弁時(時刻t1)から閉弁動作開始時(時刻t3)までの時間T1(=t3−t1)(以下「電磁弁開時間T1」)を示している。また、図6に示す2つの曲線は、目標値である総吐水量VTがVAである場合と、総吐水量VTがVAよりも大きいVBである場合についてそれぞれ示している。
なお、図6に示すグラフは、本実施形態の自動給水装置における電磁弁の開閉制御(吐水量制御)に用いられるテーブル情報として、コントローラ22のメモリ(図示せず)に予め記憶されている。
【0039】
さらに、図7は、図6に示す流量センサーの総積算回転数と電磁弁開弁時間との関係について補正を行うために用いられる流量センサーの積算回転数と総吐水量との関係を示すグラフの一例であり、各電磁弁開時間T1で比較している。
ここで、図7の横軸は流量センサー20の羽根車20aの総積算回転数NT[rev]を示し、図7の縦軸は自動給水装置1から水洗大便器2に吐水される総吐水量VT[L]を示している。
なお、図7に示すグラフは、本実施形態の自動給水装置における電磁弁の開閉制御(吐水量制御)に用いられるテーブル情報として、コントローラ22のメモリ(図示せず)に予め記憶されている。
【0040】
まず、図3に示すように、便器使用後、時刻t0(=0[s])で使用者Uが人体感知センサー24から離れると、人体感知センサー24が非検知状態となり、この非検知状態を示す信号がコントローラ22に送信される。そして、この人体感知センサー24から送信された信号を受信したコントローラ22により、電磁弁16を開弁させる指令信号が電磁弁16に送信され、時刻t1(例えば、4[s])で電磁弁16の開弁動作が開始する。
【0041】
つぎに、図3に示す時刻t1からΔt秒後(例えば、0.8秒後)の時刻t2(例えば、4.8[s])までの期間(t2−t1)における流量センサー20の羽根車20aの積算回転数N[rev]が測定される。
なお、図3における時刻t3は、電磁弁16の閉弁動作が開始する時刻を示しており、時刻t4は、一次側通水路8aの通水の流動圧Pが高い場合(P=PH)においてピストンバルブ14が完全に閉止したときの時刻を示し、時刻t5は、一次側通水路8aの通水の流動圧Pが低い場合(P=PL)においてピストンバルブ14が完全に閉止したときの時刻を示している。
【0042】
つぎに、図4に示すように、時刻t1で電磁弁16の開弁動作が開始してから時刻t3で電磁弁16の閉弁動作が開始するまでの期間(電磁弁開時間T1に相当)において、各流動圧P1,P2,P3,P4における流量センサー20の羽根車20aの回転数nは、電磁弁16を通過した二次側通水路8b内の通水の瞬間流量に相当するものであるが、各流動圧P1,P2,P3,P4で非常にばらついていることがわかる。
また、流量センサー20の羽根車20aの回転数nをより安定して検知しようとする場合、羽根車20aの回転数n[rpm]が定常状態が継続しているときの所定の期間の平均値を用いることが理想的であるが、時刻t1から羽根車20aの回転数n[rpm]が定常状態になるまでにある程度の時間を要するため、例えば、電磁弁16の閉弁動作が開始されるべき時刻t3以後に羽根車20aの回転数n[rpm]が定常状態になったときには、時刻t3で電磁弁16の閉弁動作を開始するタイミングを逃す可能性がある。
【0043】
そこで、本実施形態では、図5に示すように、時刻t1で電磁弁16の開弁動作が開始してから時刻t3で電磁弁16の閉弁動作が開始するまでの期間(電磁弁開時間T1に相当)において、流量センサー20の羽根車20aの積算回転数N[rev]が、時間の経過と共にばらつくことなく、ほぼ比例的に増加する傾向となることに着目し、この時刻t1からt3までの期間における流量センサー20の羽根車20aの積算回転数N[rev]を検知することにより、電磁弁16を通過した二次側通水路8b内の通水の流量を安定して検知することができるようになっている。
【0044】
すなわち、図5に示すように、例えば、時刻t1から時刻t3までの期間内において、時刻t1(例えば、4.0[s])からΔt秒後(例えば、0.8秒後)の時刻t2(例えば、4.8[s])(t1<t2<t3)における流量センサー20の羽根車20aの積算回転数がNA[rev]として測定された場合には、一次側通水路8aの吐水の流動圧PがP1[KPa]として決定され、一次側通水路8aの水圧状態を確認することができる。
【0045】
さらに、例えば、水洗大便器2に吐水される総吐水量VTの目標値がVA[L](例えば、6[L])の場合には、図5によって決定された流量センサー20の羽根車20aの積算回転数NAを図6の総吐水量VAの線図に当てはめることにより、電磁弁開時間T1がTA[s]としてコントローラ22によって決定される。
すなわち、図5において時刻t1から時刻t2までの所定時間Δtに算出された積算回転数NAは、所定時間Δtに二次側通水路8bを流れた通水の流量、すなわち、現場の水圧状態に相当するため、この所定時間Δtに二次側通水路8bを流れた通水の流量に基づいて水圧状態を把握し、電磁弁開時間T1がTA[s]として決定されたことになる。
また、電磁弁開時間T1が決定されると、電磁弁16の閉弁動作が開始する時刻t3がt1+TAとして決定され、この時刻t3になると実際に電磁弁16の閉弁動作が開始される。
【0046】
その後、図3に示すように、一次側通水路8aの通水の流動圧Pが高い場合(P=PH)には、時刻t4でピストンバルブ14が通水路8dを完全に閉止する。
また、図3に示すように、一次側通水路8aの通水の流動圧Pが低い場合(P=PL)には、時刻t5でピストンバルブ14が通水路8dを完全に閉止する。
【0047】
ちなみに、一次側通水路8aの吐水の水圧状態を確認することにより、例えば、一次側通水路8aの吐水の流動圧の大きさが大きい程、図3に示す瞬間流量Qの大きさの最大値が相対的に大きくなる。
【0048】
また、図3に示す電磁弁16の開弁動作が開始する時刻t1から電磁弁16の閉弁動作が開始する時刻t3までの時間T1(=t3−t1)における瞬間流量Qを時間積分した量は、流動圧Pが高い場合(P=PH)と低い場合(P=PL)のそれぞれに関する二次側通水路8b内に吐水される吐水量VH1,VL1(以下「電磁弁開時吐水量VH1,VL1」)を示しているが、この電磁弁開時吐水量VH1,VL1は、一次側通水路8aの吐水の流動圧の大きさが大きい程、大きくなっている。
【0049】
さらに、図3に示す流動圧Pが高い場合(P=PH)、電磁弁16の閉弁動作が開始する時刻t3から電磁弁16が完全に閉止する時刻t4までの時間T2(=t4−t3)(以下「閉止時間T2」)における瞬間流量Qを時間積分した量は、電磁弁16が閉弁動作を開始してから閉止するまでに自動給水装置本体4の吐水口10から流出する吐水量VH2(以下「閉止吐水量VH2」)を示している。
同様に、図3に示す流動圧Pが低い場合(P=PL)、電磁弁16の閉弁動作が開始する時刻t3からピストンバルブ14が完全に閉止する時刻t5(>t4)までの時間T3(=t5−t3)(以下「閉止時間T3」)における瞬間流量Qを時間積分した量は、電磁弁16が閉弁動作を開始してからピストンバルブ14が閉止するまでに自動給水装置本体4の吐水口10から流出する吐水量VL2(以下「閉止吐水量VL2」)を示している。
【0050】
定量吐水を行う本実施形態の自動給水装置1では、吐水の流動圧の大きさにかかわらず、電磁弁開時吐水量VH1と閉止吐水量VH2との和である総吐水量VT(=VH1+VH2)、並びに電磁弁開時吐水量VL1と閉止吐水量VL2との和である総吐水量VT(=VL1+VL2)が一定となるため、流動圧Pが高い場合(P=PH)の閉止吐水量VH2は、流動圧Pが低い場合(P=PL)の閉止吐水量VL2よりも相対的に少なくなり、流動圧Pが高い場合(P=PH)のピストンバルブ14の閉止時間T2(=t4−t3)についても、流動圧Pが低い場合(P=PL)のピストンバルブ14の閉止時間T3(=t5−t3)よりも短くなる。
【0051】
さらに、総吐水量VTと総積算回転数NTの間には図7に示す関係があることから、図7を用いて、コントローラ22により、目標値の吐水量に対応する流量センサー20の羽根車20aの総積算回転数の目標値N0と実際の流量センサー20の羽根車20aの総積算回転数Nとを比較し実際の総積算回転数NTが総積算回転数の目標値N0よりも減少していた場合には、実際の総積算回転数NTが総積算回転数の目標値N0になるように電磁弁開時間T1を増加させる補正を行う。
一方、実際の総積算回転数NTが総積算回転数の目標値N0よりも増加していた場合には、実際の総積算回転数NTが総積算回転数の目標値N0になるように電磁弁開時間T1を減少させる補正を行う。
【0052】
上述した本発明の第1実施形態による自動給水装置1によれば、コントローラ22により、電磁弁16の開弁動作開始時刻t1から閉弁動作開始時刻t3までの期間内の時刻t1から時刻t2までの所定期間Δtにおいて流量センサー20が検知した水流情報である羽根車20aの積算回転数N[rev]に基づいて、電磁弁16が閉弁動作を開始してからピストンバルブ14が閉止するまでに吐水口10から流出する閉止吐水量VH2,VL2を考慮した上で、吐水口10から水洗大便器2に吐水される総吐水量VTが所定の総吐水量VA,VBになるように、電磁弁開時間T1並びに電磁弁16の閉弁動作を開始する時刻t3を調整し、この調整した時刻t3に達したときに、電磁弁16の閉弁動作を開始することができる。この結果、自動給水装置1が設置される現場や地域、自動給水装置の使用時間帯、毎回の使用状況等によって変動する給水圧や瞬間流量のばらつきによる水洗大便器2への総吐水量VTの誤差を低減させることができる。
また、電磁弁16の開弁動作開始時刻t1から閉弁動作開始時刻t3までの期間内の時刻t1から時刻t2までの所定期間Δtである比較的短い期間を利用し、この期間Δtで流量センサー20の羽根車20aの積算回転数N[rev]を検知することにより、この所定期間Δtに行われる水洗大便器2への瞬間的な吐水量に相当する瞬間流量のばらつきや、電磁弁16が閉弁動作を開始してから閉止するまでに吐水口10から流出する閉止吐水量VH2,VL2のばらつきの影響を受けることなく、水洗大便器2への定流量吐水を実現することができる。
【0053】
さらに、本実施形態による自動給水装置1によれば、コントローラ22により、電磁弁16の開弁動作開始時刻t1から閉弁動作開始時刻t3までの全期間よりも短い一部期間(時刻t1から時刻t2までの所定期間Δt)で流量センサー20の羽根車20aの積算回転数N[rev]を検知することにより、この積算回転数N[rev]に相当する二次側通水路8b内の流量に基づいて、電磁弁開時間T1を決定することができる。
また、時刻t1で電磁弁16の開弁動作が開始してから時刻t3で電磁弁16の閉弁動作が開始するまでの期間において、流量センサー20が二次側通水路8b内の水流情報(流量情報)を瞬間的に検知した場合には、図4に示すように、各流動圧P1,P2,P3,P4における流量センサー20の羽根車20aの回転数n(電磁弁16を通過した二次側通水路8b内の通水の瞬間流量に相当)が、各流動圧P1,P2,P3,P4で非常にばらついており、水洗大便器2に吐水される総吐水量VTの誤差を縮めるのが難しい状況であるにもかかわらず、本実施形態では、電磁弁16の開弁動作開始時刻t1から閉弁動作開始時刻t3までの期間内の時刻t1から時刻t2までの比較的短い所定期間Δtにおいても、時間の経過と共にばらつくことなく、ほぼ比例的に増加する流量センサー20の羽根車20aの積算回転数N[rev]を安定して精度よく検知することができるため、水洗大便器2に吐水される総吐水量VTの誤差を精度よく縮めることができる。
さらに、所定期間Δtに流量センサー20が検知した二次側通水路8b内の流量情報に基づいて電磁弁開時間T1を決定することができ、電磁弁16が閉弁動作を開始してから閉止するまでに吐水口10から流出する閉止吐水量VH2,VL2を容易に考慮することができる。この結果、水流情報を瞬間的に測定して複雑な演算処理を行うことなく、自動給水装置1が設置される現場や地域、自動給水装置1の使用時間帯、毎回の使用状況等によって変動する給水圧や瞬間流量のばらつきを考慮した電磁弁開時間T1を簡易な構成により調整することができる。
また、二次側通水路8b内の水流により回転する羽根車20aを備えた流量センサー20が用いられているため、羽根車20aの回転のパルス数をカウントすることにより直接的且つ簡易に流量情報を得ることができ、流量情報に得るための演算処理の負荷を簡易な構成により減らすことができる。
【0054】
さらに、本実施形態による自動給水装置1によれば、流量センサー20で検知した二次側通水路8b内の吐水の流量情報に基づいて総吐水量VTが目標値の総吐水量になっていない場合には、図7を用いて、コントローラ22により、目標値の総吐水量に対応する流量センサー20の羽根車20aの総積算回転数の目標値N0と実際の流量センサー20の羽根車20aの総積算回転数NTが一致するように電磁弁開時間T1を補正することができるため、水洗大便器2に吐水される総吐水量VTの誤差をより精度よく縮めることができる。
【0055】
つぎに、図5及び図8を参照して、本発明の第2実施形態による自動給水装置における電磁弁の開閉制御(吐水量制御)について説明する。
なお、本発明の第2実施形態による自動給水装置においては、上述した第1実施形態による自動給水装置1と構成が同一であるが、電磁弁16の開閉制御(吐水量制御)の内容の一部が第1実施形態における制御内容と異なっているため、以下、制御内容の異なる部分のみについて説明を行い、これ以外の第1実施形態の制御内容と共通する部分については、説明を省略する。
【0056】
図8は、本発明の第2実施形態による自動給水装置における電磁弁開弁時から流量センサーの積算回転数が所定の積算回転数に達するまでの時間と電磁弁開弁時間との関係を示すグラフである。
ここで、図8の横軸は、電磁弁16の開弁時(時刻t1)に流量センサー20の羽根車20aの回転が開始してから、羽根車20aの積算回転数Nが20回転に達したときの時間t[s]を示し、図8の縦軸は、電磁弁開時間T1を示している。
また、図8に示す2つの線は、目標値である総吐水量VTがVAである場合と、総吐水量VTがVAよりも大きいVBである場合についてそれぞれ示している。
【0057】
まず、図5に示すように、本発明の第2実施形態による自働給水装置においては、時刻t1から時刻t3までの期間内において、時刻t1で電磁弁16の開弁動作が開始し、流量センサー20の羽根車20aの積算回転数NがNA’[rev](例えば、20回転)として測定されたときの時間Δt’を測定し、この積算回転数NA’と時間Δt’を図5に当てはめることにより、時刻t1で流量センサー20の羽根車20aの回転が開始してから所定の積算回転数NA’(例えば、20回転)に達する時刻t2’(t2’<t3)までの時間Δt’における吐水の流動圧Pを決定し、水圧状態を確認する。
【0058】
つぎに、例えば、水洗大便器2に吐水される総吐水量VTの目標値がVA[L](例えば、6[L])の場合には、図5によって決定された時間Δt’を図8の総吐水量VAの線図に当てはめることにより、電磁弁開時間T1がTA’[s]としてコントローラ22によって決定される。
すなわち、図5において時刻t1から時刻t2’までの所定時間Δt’に算出された積算回転数NA’は、所定時間Δt’に二次側通水路8bを流れた通水の流量に相当するため、この積算回転数NA’に相当する流量に達するまでに要する所定時間Δt’に基づいて電磁弁開時間T1がTA’[s]として決定されたことになる。
また、電磁弁開時間T1が決定されると、電磁弁16の閉弁動作が開始する時刻t3がt1+TA’として決定され、この時刻t3になると実際に電磁弁16の閉弁動作が開始される。
【0059】
上述した本発明の第2実施形態による自動給水装置によれば、電磁弁16の開弁動作開始時刻t1から閉弁動作開始時刻t3までの全期間よりも短い一部期間(時刻t1から時刻t2’までの所定期間Δt’)において、時刻t1で電磁弁16の開弁動作が開始してから、流量センサー20の羽根車20aの積算回転数NがNA’[rev]にするまでの時間、すなわち、二次側通水路8b内の流量が所定の流量に達するまでに要する時間に基づいて電磁弁開時間T1を決定することができる。この結果、自動給水装置1が設置される現場や地域、自動給水装置1の使用時間帯、毎回の使用状況等によって変動する給水圧や瞬間流量のばらつきを考慮し、電磁弁16が閉弁動作を開始してから閉止するまでに吐水口10から流出する閉止吐水量VH2,VL2のばらつきの影響を受けることなく、水洗大便器2への定流量吐水を簡易な構成により実現することができる。
【0060】
なお、上述した本発明の第1実施形態及び第2実施形態による自動給水装置の電磁弁の開閉制御(吐水量制御)においては、電磁弁16の開弁動作開始時刻t1から閉弁動作開始時刻t3までの期間内の時刻t1から時刻t2,t2’までの比較的短い一部の所定期間Δtを利用することにより、電磁弁開時間T1を決定する例について説明したが、時刻t1より後で且つ時刻t3よりも前の途中期間を利用して電磁弁開時間T1を決定してもよい。
【符号の説明】
【0061】
1 自動給水装置
2 水洗大便器
4 自動給水装置本体
6 給水口
8 通水路
8a 一次側通水路
8b 二次側通水路
8c 二次側通水路の入口
8d 通水路
10 吐水口
12 圧力室
14 ピストンバルブ(主弁体)
16 電磁弁
18 発電機
18a 羽根車
20 流量センサー(水流情報検知部)
20a 羽根車
22 コントローラ(制御部)
24 人体感知センサー
【特許請求の範囲】
【請求項1】
使用者の動作に基づいて便器に洗浄水を自動的に吐水する自動給水装置であって、
洗浄水が給水される給水口が上流側に位置し、洗浄水を便器に吐水する吐水口が下流側に位置する通水路が形成され、この通水路に圧力室が設けられた自動給水装置本体と、
上記自動給水装置本体の圧力室内に設けられ、この圧力室内の水圧に応じて上記通水路を開閉する主弁体と、
上記自動給水装置本体の通水路に開閉可能に設けられ、開閉することにより上記圧力室内の水圧を変化させて上記主弁体を開閉させる電磁弁と、
上記自動給水装置本体の通水路に設けられ、この通水路内の水流情報を検知する水流情報検知部と、
この水流情報検知部により検知した上記水流情報に基づいて、上記電磁弁の開弁後の閉弁動作を開始する時期を調整し、便器洗浄を制御する制御部と、を有し、
上記制御部は、上記電磁弁の開弁動作開始時から上記電磁弁の閉弁動作開始時までの期間内の所定期間で上記水流情報検知部が検知した上記水流情報に基づいて、上記電磁弁が閉弁動作を開始してから上記主弁体が閉止するまでに上記吐水口から流出する閉止吐水量を考慮した上で、上記吐水口から上記便器に吐水される総吐水量が所定の吐水量になるように、上記電磁弁の閉弁動作を開始する時期を調整し、この調整した時期に達したときに、上記電磁弁の閉弁動作を開始することを特徴とする自動給水装置。
【請求項2】
上記所定期間は、上記電磁弁の開弁動作開始時から上記電磁弁の閉弁動作開始時までの全期間よりも短い一部期間であり、上記制御部は、上記所定期間で上記水流情報検知部が上記通水路内の流量情報を上記水流情報として検知し、上記流量情報に基づいて、上記閉止吐水量を考慮した上で、上記総吐水量が所定の吐水量となるように、上記電磁弁の閉弁動作を開始する時期を調整し、この調整した時期に達したときに、上記電磁弁の閉弁動作を開始する請求項1記載の自動給水装置。
【請求項3】
上記制御部は、上記一部期間において、上記水流情報検知部が検知した上記通水路内の流量が所定の流量に達するまでに要する時間に基づいて、上記電磁弁の閉弁動作を開始する時期を決定する請求項2記載の自動給水装置。
【請求項4】
上記制御部は、上記一部期間における所定時間内に流れた上記通水路内の流量に基づいて、上記電磁弁の閉弁動作を開始する時期を決定する請求項2記載の自動給水装置。
【請求項5】
上記一部期間は、上記電磁弁の開弁動作の開始時刻から所定時間経過後までの期間である請求項2乃至4の何れか1項に記載の自動給水装置。
【請求項6】
上記制御部は、更に、上記総吐水量が上記所定の吐水量になっていない場合には、上記電磁弁の閉弁動作を開始する時期を補正する請求項1乃至5の何れか1項に記載の自動給水装置。
【請求項1】
使用者の動作に基づいて便器に洗浄水を自動的に吐水する自動給水装置であって、
洗浄水が給水される給水口が上流側に位置し、洗浄水を便器に吐水する吐水口が下流側に位置する通水路が形成され、この通水路に圧力室が設けられた自動給水装置本体と、
上記自動給水装置本体の圧力室内に設けられ、この圧力室内の水圧に応じて上記通水路を開閉する主弁体と、
上記自動給水装置本体の通水路に開閉可能に設けられ、開閉することにより上記圧力室内の水圧を変化させて上記主弁体を開閉させる電磁弁と、
上記自動給水装置本体の通水路に設けられ、この通水路内の水流情報を検知する水流情報検知部と、
この水流情報検知部により検知した上記水流情報に基づいて、上記電磁弁の開弁後の閉弁動作を開始する時期を調整し、便器洗浄を制御する制御部と、を有し、
上記制御部は、上記電磁弁の開弁動作開始時から上記電磁弁の閉弁動作開始時までの期間内の所定期間で上記水流情報検知部が検知した上記水流情報に基づいて、上記電磁弁が閉弁動作を開始してから上記主弁体が閉止するまでに上記吐水口から流出する閉止吐水量を考慮した上で、上記吐水口から上記便器に吐水される総吐水量が所定の吐水量になるように、上記電磁弁の閉弁動作を開始する時期を調整し、この調整した時期に達したときに、上記電磁弁の閉弁動作を開始することを特徴とする自動給水装置。
【請求項2】
上記所定期間は、上記電磁弁の開弁動作開始時から上記電磁弁の閉弁動作開始時までの全期間よりも短い一部期間であり、上記制御部は、上記所定期間で上記水流情報検知部が上記通水路内の流量情報を上記水流情報として検知し、上記流量情報に基づいて、上記閉止吐水量を考慮した上で、上記総吐水量が所定の吐水量となるように、上記電磁弁の閉弁動作を開始する時期を調整し、この調整した時期に達したときに、上記電磁弁の閉弁動作を開始する請求項1記載の自動給水装置。
【請求項3】
上記制御部は、上記一部期間において、上記水流情報検知部が検知した上記通水路内の流量が所定の流量に達するまでに要する時間に基づいて、上記電磁弁の閉弁動作を開始する時期を決定する請求項2記載の自動給水装置。
【請求項4】
上記制御部は、上記一部期間における所定時間内に流れた上記通水路内の流量に基づいて、上記電磁弁の閉弁動作を開始する時期を決定する請求項2記載の自動給水装置。
【請求項5】
上記一部期間は、上記電磁弁の開弁動作の開始時刻から所定時間経過後までの期間である請求項2乃至4の何れか1項に記載の自動給水装置。
【請求項6】
上記制御部は、更に、上記総吐水量が上記所定の吐水量になっていない場合には、上記電磁弁の閉弁動作を開始する時期を補正する請求項1乃至5の何れか1項に記載の自動給水装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−207500(P2012−207500A)
【公開日】平成24年10月25日(2012.10.25)
【国際特許分類】
【出願番号】特願2011−75752(P2011−75752)
【出願日】平成23年3月30日(2011.3.30)
【出願人】(000010087)TOTO株式会社 (3,889)
【Fターム(参考)】
【公開日】平成24年10月25日(2012.10.25)
【国際特許分類】
【出願日】平成23年3月30日(2011.3.30)
【出願人】(000010087)TOTO株式会社 (3,889)
【Fターム(参考)】
[ Back to top ]