
自動装置
【課題】誤動作や誤検知による無駄な動作を防止した自動装置を提供する。
【解決手段】放射した送信波の被検知体による反射波及び透過波の少なくともいずれかを受信波として受信するアンテナと、前記送信波と前記受信波とに基づいて検知信号を生成するミキサ部と、前記ミキサ部から出力された検知信号の周波数を検出する周波数検出部と、前記周波数検出部による検出の結果に基づいて制御信号を出力する判定部と、前記制御信号により制御される被制御部と、を備え、前記判定部は、前記検知信号の周波数が降下し、その後、前記検知信号の周波数が上昇し、または上昇の後に降下し、または略一定値を維持した後に降下すると前記被制御部に対して第1動作を実行させる制御信号を出力することを特徴とする自動装置が提供される。
【解決手段】放射した送信波の被検知体による反射波及び透過波の少なくともいずれかを受信波として受信するアンテナと、前記送信波と前記受信波とに基づいて検知信号を生成するミキサ部と、前記ミキサ部から出力された検知信号の周波数を検出する周波数検出部と、前記周波数検出部による検出の結果に基づいて制御信号を出力する判定部と、前記制御信号により制御される被制御部と、を備え、前記判定部は、前記検知信号の周波数が降下し、その後、前記検知信号の周波数が上昇し、または上昇の後に降下し、または略一定値を維持した後に降下すると前記被制御部に対して第1動作を実行させる制御信号を出力することを特徴とする自動装置が提供される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自動装置に関し、より具体的には人体を検知して所定の動作を実行する自動装置に関する。
【背景技術】
【0002】
人体を検知して自動的に吐水などを実行する水栓やトイレなどの自動装置は、衛生的であるばかりでなく、ユニバーサル・デザインの観点からも優れ、節水効果なども得られるため、公共的な施設ばかりでなく一般家庭にも普及が進んでいる。
これら自動装置には、使用者を検知するためのセンサが必要とされる。マイクロ波を便器正面へ発射し、対象物により反射されたマイクロ波を受信して、そのドップラー周波数信号のパワースペクトルを求め、そのピーク値と所定の閾値とを比較することにより、人体を検知する人体検知装置が開示されている(特許文献1)。
【特許文献1】特開平9−80150号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
使用者を検知して自動的に動作をする場合、誤動作や、誤検知による無駄な動作を無くすことが望ましい。
本発明は、かかる観点からなされたものであり、誤動作や誤検知による無駄な動作を防止した自動装置を提供する。
【課題を解決するための手段】
【0004】
本発明の一態様によれば、放射した送信波の被検知体による反射波及び透過波の少なくともいずれかを受信波として受信するアンテナと、前記送信波と前記受信波とに基づいて検知信号を生成するミキサ部と、前記ミキサ部から出力された検知信号の周波数を検出する周波数検出部と、前記周波数検出部による検出の結果に基づいて制御信号を出力する判定部と、前記制御信号により制御される被制御部と、を備え、前記判定部は、前記検知信号の周波数が降下し、その後、前記検知信号の周波数が上昇し、または上昇の後に降下し、または略一定値を維持した後に降下すると前記被制御部に対して第1動作を実行させる制御信号を出力することを特徴とする自動装置が提供される。
【発明の効果】
【0005】
本発明によれば、誤動作や誤検知による無駄な動作を防止した自動装置が提供される。
【発明を実施するための最良の形態】
【0006】
以下、図面を参照しつつ、本発明の実施の形態について説明する。
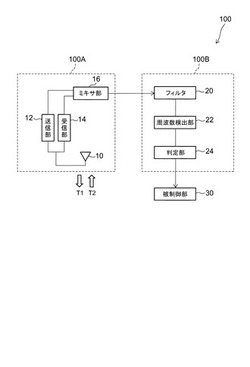
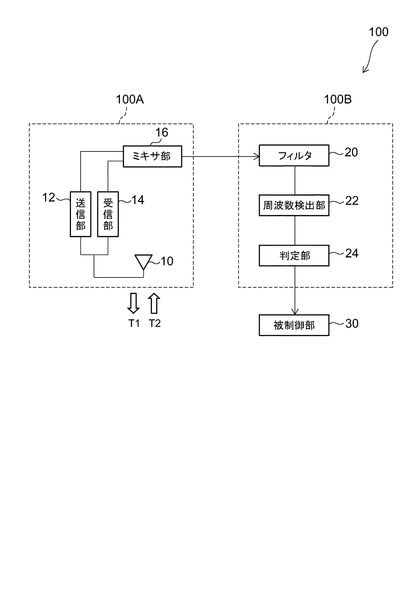
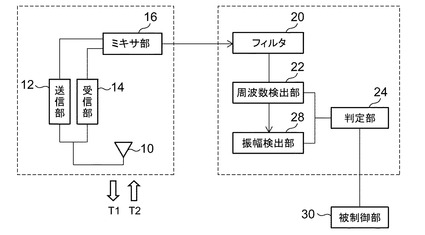
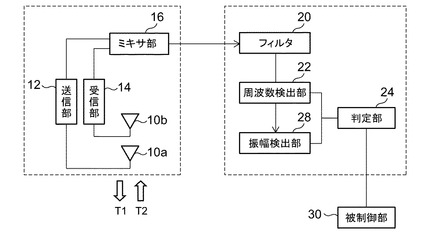
図1及び図2は、本発明の実施の形態にかかる自動装置の2つの具体例のブロック図である。
【0007】
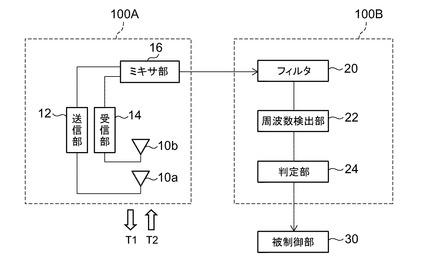
自動装置は、センサ部100と、被制御部30と、を有する。センサ部100は、検知部100Aと、処理部100Bと、を有する。検知部100Aには、アンテナ10、送信部12、受信部14、ミキサ部16が設けられている。送信部12に接続されたアンテナ10からは、高周波、マイクロ波あるはミリ波などの10kHz〜100GHzの周波数帯の電波が放射される。具体的には、アンテナ10からは、例えば10.525GHzの周波数を有する送信波T1が放射される。人体などの被検知体からの反射波または透過波T2は、アンテナ10を経由して受信部14に入力される。ここで、アンテナは、図1に表したように送信側と受信側とを共通としてもよく、または、図2に表したように、送信部12にはアンテナ10aを接続し、受信部14にはアンテナ10bを接続してもよい。
送信波の一部と受信波とは、ミキサ部16にそれぞれ入力され、ドップラー効果が反映された出力信号が出力される。すなわち、人体などの被検知体が移動すると、ドップラー効果によって反射波の波長がシフトする。ドップラー周波数ΔF(Hz)は、下記の式(1)により表すことができる。
ΔF=Fs−Fb=2×Fs×v/c 式(1)
但し、Fs:送信周波数(Hz)
Fb:反射周波数(Hz)
v:物体の移動速度(m/s)
c:光速(=300×106m/s)
検知部100Aを移動体に向けると、式(1)で表されるように、その速度vに比例した周波数ΔFを含む出力信号を得ることができる。出力信号は周波数スペクトラムを有し、スペクトラムのピークに対応するピーク周波数と移動体の速度vとの間には相関関係がある。従って、ドップラー周波数ΔFを測定することにより速度vを求めることができる。なお、日本においては、人体を検知する目的には10.50〜10.55GHzまたは24.05〜24.25GHzの周波数が使用できる。
【0008】
ミキサ部16から出力された検知信号は、処理部100Bに出力される。処理部100Bには、フィルタ20、周波数検出部22、判定部24が設けられている。ミキサ部16から出力された検知信号は、まずフィルタ20において例えば高周波数成分が取り除かれる。この際のフィルタリング周波数は、例えば100Hzとすることができる。フィルタ20から出力された検知信号の周波数が周波数検出部22において検出される。そして、判定部24は、周波数検出部22によって検出された周波数の変化に基づいて、被制御部30に対して制御信号を適宜出力する。
【0009】
被制御部30は、後に詳述するように、例えば、自動水栓の開閉弁や、手指乾燥機の温風生成部や、衛生洗浄装置の便座ヒータや、便蓋開閉装置や、照明などである。つまり、本実施形態の自動装置は、検知部100Aと処理部100Bによる検知の結果に基づいて、被制御部30を自動的に制御する。
【0010】
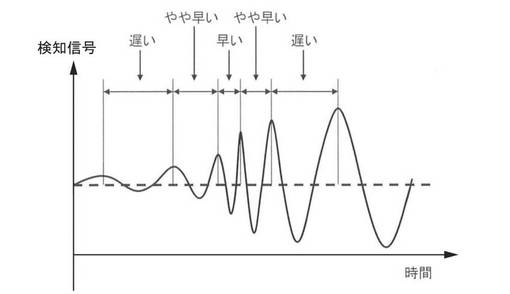
図3は、被検知体の移動速度による検知信号の周波数の変化を模式的に表すグラフ図である。ここでは、横軸は時間である。
ここでは便宜的に周波数の変化を検知信号のピーク間の時間により表した。被検知体の速度が低い場合には、検知信号のピーク間の時間が長くなり、検知信号の周波数は低くなる。一方、被検知体の速度が大きい場合には、検知信号のピーク間の時間が短くなり、検知信号の周波数は高くなる。このように、検知信号の周波数の時間変化を監視することにより、被検知体の速度の変化を検出することができる。また、後に詳述するように、検知信号の振幅は、被検知体の大きさや被検知体までの距離に応じて変化する。すなわち、被検知体のサイズが大きいと検知信号の振幅は大きく、また被検知体までの距離が小さいほど検知信号の振幅は大きくなる。
【0011】
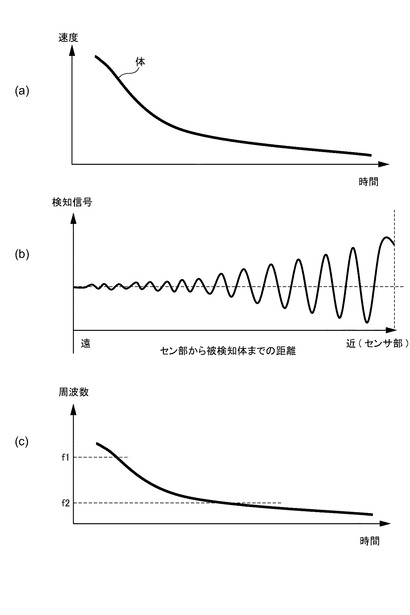
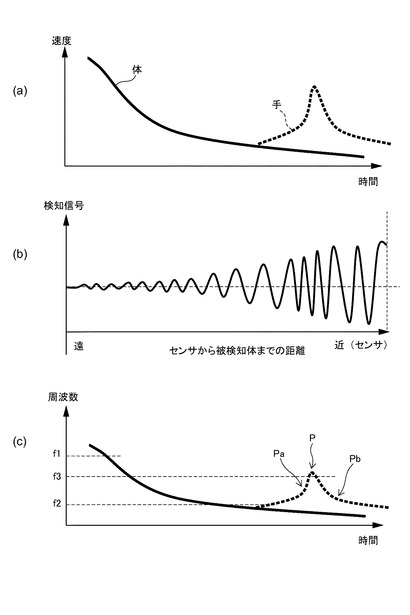
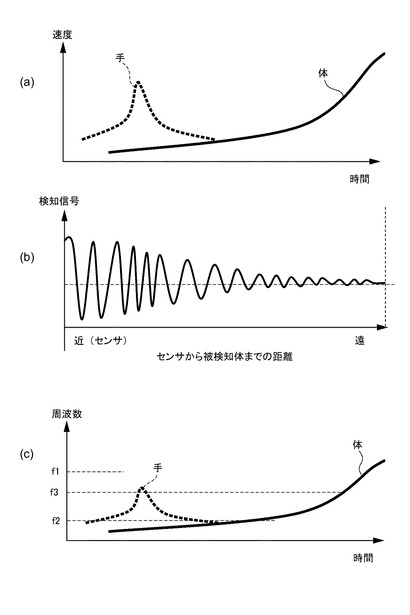
図4は、自動装置に接近する使用者の速度と検知信号の周波数の変化との関係を表すグラフ図である。
使用者が目標とする自動装置(例えば、自動水栓)に接近する場合、図4(a)に表したように、通常は、目標物に近づくにつれて、衝突を避けるために減速する。この時、自動装置の検知部100Aにおける検知信号の振幅は図4(b)に表したように徐々に大きくなり、同時にその周波数も図4(c)に表したように徐々に降下する。本実施形態においては、例えばこのような周波数の降下を検出することにより、その自動装置を使用する意思を有する被検知体の接近を高い確度で検知することができる。
【0012】
例えば、自動水栓や温風を吹き出して手指を乾燥させる手指乾燥機などの場合、これを使用する使用者は、まずこれらの自動装置に接近し、しかる後に手を差し出す。この時、使用者の身体が接近する際には、図4に関して前述したようにその速度は徐々に降下する。そして、使用者が目標物に到達すると手を差し出す。例えば、自動水栓の場合には、スパウトの下に向けて手を差し出すが、この時の手の移動速度も、最初は加速し、その後減速してスパウトの下に手が到達する。従って、使用者の体が接近する際の減速動作に続いて、手の加速→減速の動作が実行される。
【0013】
図5は、この時の検知信号に含まれる周波数の時間変化を説明するための模式図である。
前述したように、使用者が自動水栓などの目標物に接近する場合には、まず目標物に近づくにつれて身体が減速する。この時、自動装置における検知信号の振幅は、図5(b)に表したように徐々に大きくなり、同時にその周波数は図5(c)に表したように身体の減速に対応して降下する。
そして、これに続いて使用者は手を差し出す。この時の手の動きは、一般的に、最初は加速し、その後に減速する。従って、検知信号の周波数にも、手の加速→減速の動作に対応したピークが表れる。
本実施形態においては、検知信号の周波数の変化を観察し、周波数が所定の閾値を上回ったり、下回ることにより、被検知体の加速や減速を検出できる。あるいは、図5に例示したような周波数の降下とそれに続くピークPの出現を検出することにより、被検知体の接近や、自動装置の本来的な駆動をさせるために使用者が実行する動作を高い確度で検知することができる。
【0014】
なお、ピークPの有無を判定するに際しては、その加速側Paの周波数の変化(すなわち、周波数の上昇)に基づいて判定してもよく、あるいはその減速側Pbの周波数の変化(すなわち、周波数の降下)に基づいて判定してもよい。あるいは、加速から減速に転ずる周波数の変化(すなわち、変化の方向が反転すること)に基づいて判定してもよい。
【0015】
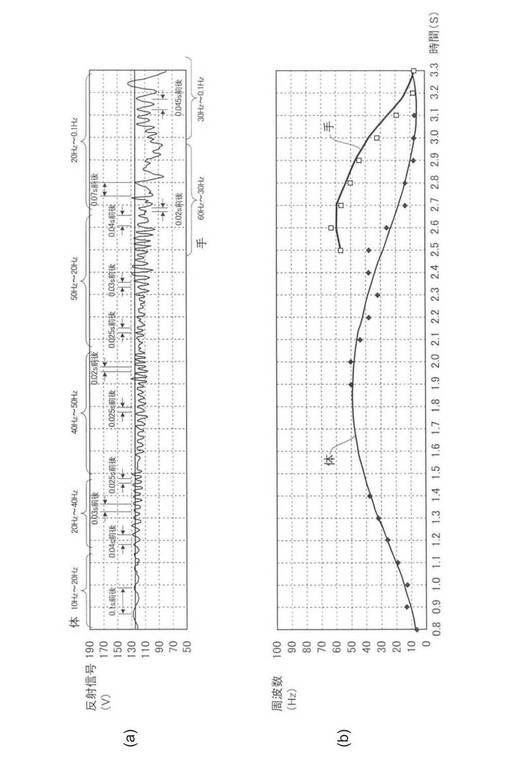
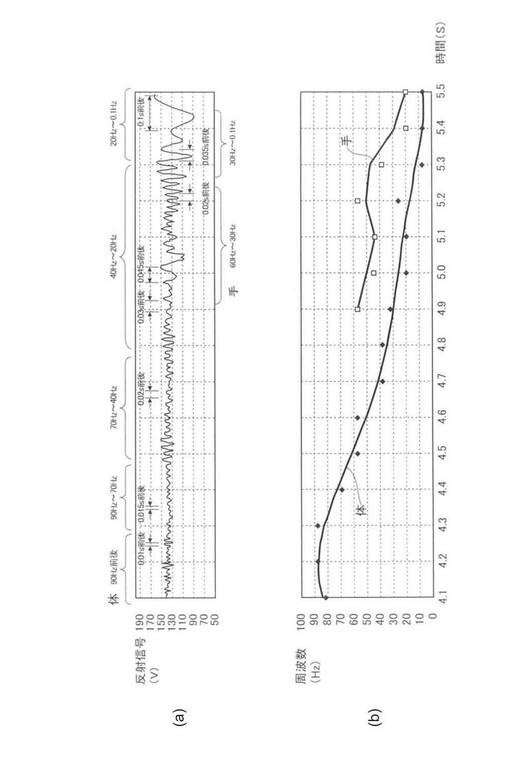
図6及び図7は、本発明者が自動水栓について実施した実験の結果を表す模式図である。すなわち、これらの図において、(a)は自動装置に設けたセンサの検知信号を表し、(b)はその周波数の時間変化を表す。
【0016】
図6は、自動水栓のセンサの検知範囲内において静止している状態から被検知体が自動水栓に向けて接近を開始し、水栓に到達したら停止して手を差し出す場合を表す。
一方、図7は、自動水栓のセンサの検知範囲よりも外側から被検知体が自動水栓に向けて接近し、自動水栓に到達したら停止して手を差し出す場合を表す。
【0017】
図6に表した具体例の場合、検知信号の周波数の変化をみると、図6(b)に表したように、まず、被検知体の体の移動速度の変化(加速→減速)に応じて緩やかなピークが表れ、それに続いて手の加速→減速のピークが表れる。
【0018】
図7に表した具体例においても、検知信号の周波数の変化をみると、図7(b)に表したように、まず、被検知体の体の移動速度の変化(減速)に応じて周波数の降下が表れ、それに続いて手の加速→減速のピークが表れる。
【0019】
このように、被検知体の身体の接近に対応する周波数の変化と、手を差し出す時の加速→減速の動作に対応する周波数の変化と、を明瞭に分離して検出することが可能であり、自動水栓や手指乾燥機に対する使用者の接近と、手などを差し出す動作と、をそれぞれ検知することが可能である。
【0020】
また、図6及び図7から、人間が歩く速度や手を差し出す速度は検知信号において概ね90Hz以下であることが分かる。従って、本実施形態におけるフィルタ20は、概ね100Hz以下の検知信号を抽出するものであればよい。
【0021】
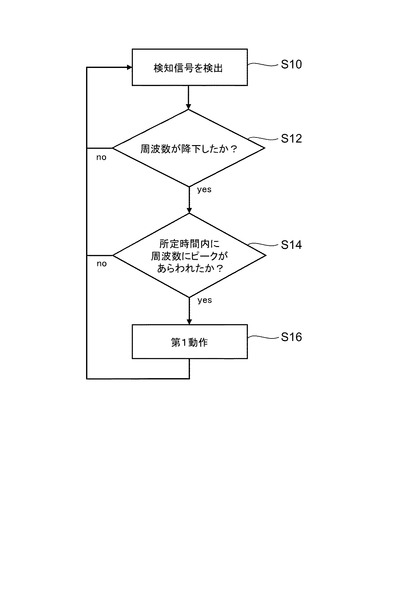
図8は、図1及び図2に表した自動装置において実行される処理を例示するフローチャートである。
まず、検知信号を検出し(ステップS10)、その周波数を周波数検出部22において検出する。そして、検知信号の周波数が図5(c)、図6、図7に例示したように、使用者の体の減速などに対応して所定の降下の傾向を示したら(ステップS12:yes)、次の判定のステップに進む。すなわち、判定部24は、所定時間内に、手の加速→減速に対応したピークが検知信号の周波数に表れるか否かを調べる(ステップS14)。そして、ピークが現れたと判定すると(ステップS14:yes)、判定部24は、被制御部30に制御信号を出力して所定の第1動作を実行させる(ステップS16)。
【0022】
例えば、図5(c)、図6、図7に例示したように、検知信号の周波数がf1よりも高い状態からf2よりも低い状態に降下したら被検知体が接近していると判定し(ステップS12:yes)、次の判定のステップ(ステップS14)に進む。例えば、検知信号の周波数が所定の閾値f3を越えるか否かを監視する。そして、検知信号の周波数が所定時間内にこの閾値f3を越えたら、手を差し出す動作などに対応したピークが表れたと判断し(ステップS14:yes)、所定の第1動作を実行する。または、検知信号の周波数が閾値f3を越えた後にf3よりも低い状態に再び降下したら、手を差し出す動作などに対応したピークが表れたと判断してもよい(ステップS14:yes)。
【0023】
一方、所定時間内にf3を越えなかった場合、すなわち周波数にピークが表れなかった場合(ステップS14:no)は、使用者は手を差し出さなかった、すなわち接近したが使用の意思がないものと判断してステップS10に戻り、検知信号の監視を続ける。すなわち、動作シーケンスをキャンセルして所期状態に戻り、周波数の最初の降下の監視を開始する。なお、ステップS14において、ピークが表れたか否かを調べる代わりに、周波数が所定の閾値を超えたか否かを基準に判定してもよい。
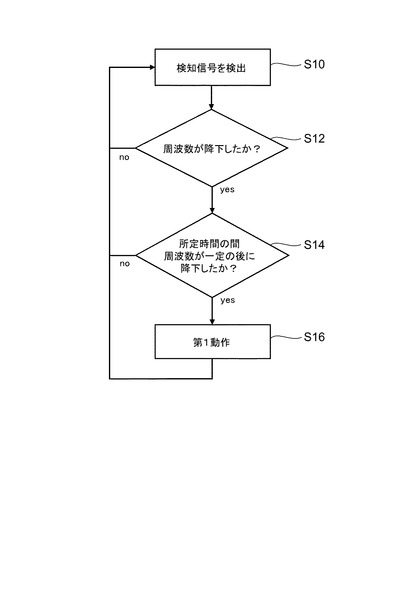
なお、ステップS14において、検知信号の周波数にピークが表れる代わりに、図9に例示した如く、周波数が略一定値を維持した後に降下した時に、第1動作を実行するようにしてもよい。つまり、図5〜図7に関した具体例において、体が接近し減速した後に手が接近し減速する際に、手を差し出す速度やタイミングによっては、手が接近する際の加速が観測されないこともあり得る。このような場合、体の減速の後に、検知信号の周波数が略一定値を維持し、その後、手の減速に対応して検知信号の周波数が降下する。つまり、(減速)→(等速)→(減速)という速度の変化が観測される場合もあり得る。このような場合には、最初の減速の後、等速の後に観測される減速に応じて制御信号を出力して所定の第1動作を実行させるようにすればよい。
【0024】
以上説明したように、本具体例においては、使用者の体の接近などに対応した周波数の降下を検知すると、それに続く周波数のピークが検知されるか否かを判定する。そして、周波数のピークを検知すると、所定の第1動作を実行する。
以上説明した周波数の降下(ステップS12)、周波数のピーク(ステップS14)、第1動作(ステップS16)について、具体例を挙げると以下の如くである。
まず、自動装置が自動水栓の場合について説明すると、周波数の降下(ステップS12)としては、典型的には、使用者の自動水栓への接近を挙げることができる。次に、周波数のピーク(ステップS14)は、水栓に接近した使用者が、手やコップなどをスパウトに向けて差し出す動作に対応する。そして、第1動作(ステップS16)としては、スパウトや吐水口から吐水する動作を挙げることができる。
【0025】
次に、自動装置が手指乾燥機の場合について説明する。ここで、手指乾燥機は、トイレや洗面台の近傍などに設置され、手洗いなどの後に使用者の手や指などを温風により乾燥させる装置である。
この場合も、周波数の降下(ステップS12)としては、典型的には、使用者の手指乾燥機への接近を挙げることができる。次に、周波数のピーク(ステップS14)は、手指乾燥機に接近した使用者が、手を温風吹出口に向けて差し出す動作に対応する。そして、第1動作(ステップS16)としては、温風を吹き出したり、殺菌灯を点灯する動作を挙げることができる。
【0026】
次に、自動装置が衛生洗浄装置などが付設されたトイレの場合について説明する。ここで、衛生洗浄装置は、腰掛便器に付設され、便座に座った使用者の「おしり」などに水を噴射して洗浄可能としたものである。
この場合には、周波数の降下(ステップS12)としては、典型的には、使用者がトイレに接近したことを挙げることができる。後に詳述するように、マイクロ波を用いたセンサの場合、例えば、トイレ室の内側からドア越しに外側の人体を検知することも可能である。つまり、従来の赤外線測距式のセンサや焦電センサの場合には、使用者がトイレ室に入室しないと検知できなかったが、本実施形態においては、トイレ室のドアの外側で使用者が接近したことも検知できる。
【0027】
次に、周波数のピーク(ステップS14)は、例えば使用者が便座に座る動作に対応する。そして、第1動作(ステップS16)としては、例えば、脱臭機能を動作させたり、便器に洗浄水を流してボウルを予め濡らした状態にしたり、衛生洗浄装置の吐水ノズルへの給水流路に残留した冷水を排出して直ちに温水を噴射可能な状態としたり、衛生洗浄装置の吐水ノズルの表面を洗浄したり、音楽や効果音を鳴らしたり、衛生洗浄装置のリモコンなどの操作部の所定のスイッチを照明したり表示部に特定のメッセージを表示して使用者にガイドしたりする動作を挙げることができる。
【0028】
次に、自動装置が洗面所や浴室などに設置された場合について説明する。
この場合には、周波数の降下(ステップS12)としては、典型的には、洗面所や浴室などへの使用者の接近を挙げることができる。そして、この場合にも、前述したようにドア越しに使用者の接近を検知できるので、従来よりもより早いタイミングで検知することが可能となる。
【0029】
次に、周波数のピーク(ステップS14)は、例えば、洗面台や浴槽などに使用者が接近する動作に対応する。そして、第1動作(ステップS16)としては、洗面台の照明を点灯させたり、電気温水器を適温に制御したり、浴室内の照明を調節したり、洗面所や浴室内の空調の方向を調節したり、ブローバスやミストサウナの運転を開始したり、音楽や効果音を鳴らしたりすることができる。
【0030】
以上説明したように、本実施形態によれば、予備的な検知(ステップS12)と、それに続く本来的な検知(ステップS14)と、が満たされた場合に、所定の第1動作を実行する。その結果として、誤検知に基づく無駄な動作や、誤動作などを防ぐことができる。
例えば、自動装置のそばにカーテンがあり、このカーテンが風で揺れた動きなどを検知して自動装置が誤動作することもあり得る。また例えば、猫や犬などのペットが自動装置の回りを徘徊した時に、その動きを検知して誤動作が生ずることもあり得る。
このような場合に、本実施形形態によれば、自動装置を使用する使用者の予備的な検知と、それに続く本来的な検知と、を満たした場合のみ所定の第1動作を実行することで、誤動作や無駄な動作を防止できる。
【0031】
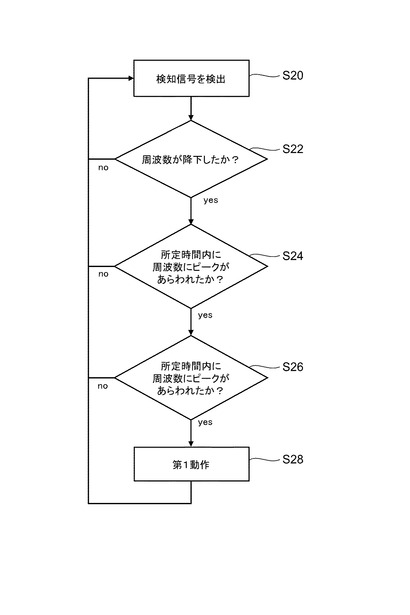
図10は、図1及び図2に表した自動装置において実行される処理の第2の具体例を表すフローチャートである。
本具体例においても、まず、検知信号を検出し(ステップS20)、その周波数を周波数検出部22において検出する。そして、検知信号の周波数が図5(c)、図6、図7に例示したように、使用者の体の減速などに対応して所定の降下の傾向を示したら(ステップS22:yes)、次の判定のステップに進む。すなわち、判定部24は、所定時間内に、被検知体の加速→減速に対応したピークが検知信号の周波数に表れるか否かを調べる(ステップS24)。そして、ピークが現れたと判定すると(ステップS24:yes)、さらに次の判定のステップに進む。すなわち、判定部24は、所定時間内に、被検知体の加速→減速に対応したピークが再び検知信号の周波数に表れるか否かを調べる(ステップS26)。そして、ピークが現れたと判定すると(ステップS26:yes)、判定部24は、被制御部30に制御信号を出力して所定の第1動作を実行させる(ステップS28)。
【0032】
例えば、自動水栓が設置されている洗面所のドアの外側から使用者が接近する場合、周波数の降下(ステップS22)としては、洗面所の外側からドアの前への使用者の接近を挙げることができる。すなわち、接近してきた使用者は、ドアの前において減速する。本実施形態においては、ドア越しに使用者の減速を周波数の降下として検知することができる。次に、周波数のピーク(ステップS24)は、ドアを開けた使用者が、自動水栓が設置された洗面台に接近する動作に対応する。すなわち、使用者は、洗面台に向けて加速→減速という動作をする。その次の周波数のピーク(ステップS26)は、自動水栓に接近した使用者が、手やコップなどをスパウトに向けて差し出す動作に対応する。そして、第1動作(ステップS28)としては、スパウトや吐水口から吐水する動作を挙げることができる。
【0033】
本具体例においては、2回の予備的な検知(ステップS22、ステップS24)と、それに続く本来的な検知(ステップS26)と、が満たされた場合に、所定の第1動作を実行する。その結果として、誤検知に基づく無駄な動作や、誤動作などを防ぐことができる。
図11及び図12は、本実施形態のもうひとつの具体例にかかる自動装置のブロック図である。これらの図については、既出の図に関して前述したものと同様の要素には同一の符号を付して詳細な説明は省略する。
本変型例においては、振幅検出部28が設けられている。振幅検出部28は、フィルタ20により抽出された検知信号の振幅を調べる。そして、判定部24は、周波数検出部22による検出結果とともに、振幅検出部28の検出結果も参酌して判定を実行する。
【0034】
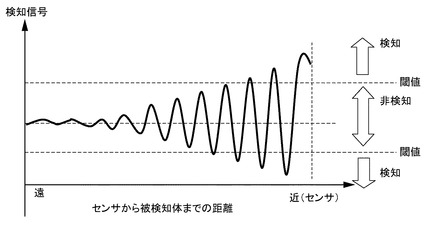
図13は、センサから被検知体までの距離と検知信号との関係を例示するグラフ図である。
図4や図5などにも例示したように、被検知体が自動装置に接近すると、検知信号の振幅は大きくなる。これとは逆に、使用者が自動装置から遠ざかると、検知信号の振幅は小さくなる。つまり、センサから被検知体までの距離に応じて検知信号の振幅が変化する。
【0035】
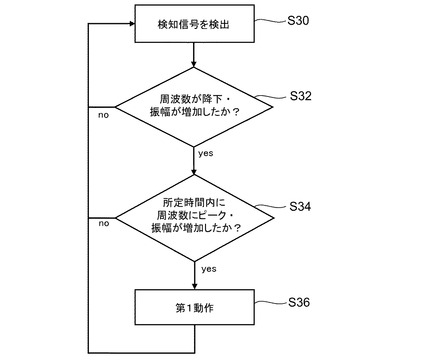
図14は、図8及び図9に関して前述したフローチャートにおいて、検知信号の振幅についても考慮した具体例である。
また、図15は、図10に関して前述したフローチャートにおいて、検知信号の振幅についても考慮した具体例である。
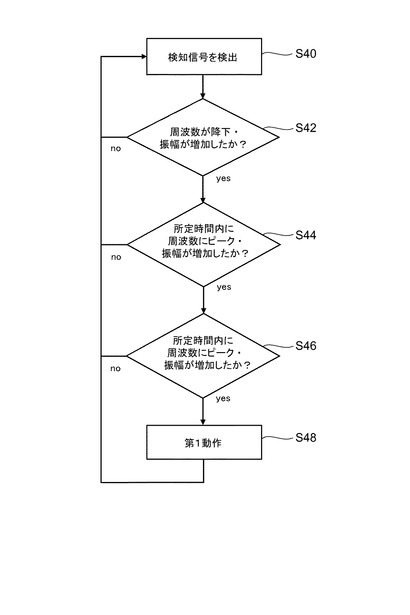
これらいずれの具体例においても、使用者(またはその手など)が接近する際には、検知信号の周波数の降下(またはピーク)とともに、検知信号の振幅の増加が観察される。そこで、検知信号の振幅の変化も考慮することにより、より確度の高い検知が可能となる。また、それぞれの検知のステップ(ステップS32、S34、S42、S44、S46)において、振幅の変化を判定する代わりに、振幅にしきい値を設けてもよい。つまり、それぞれの検知のステップにおいて、周波数の変化を判定するとともに、所定のしきい値を設け、検知信号の振幅がこのしきい値を超えた場合には、検知したと判定することもできる。なおこの場合、それぞれの判定のステップにおけるしきい値は、同一ではなく、異なるものとすることができる。
【0036】
図16は、自動水栓を使用した使用者が自動水栓から離れるまでの検知信号を例示する模式図である。
使用者が自動水栓を使用した後は、差し出していた手を引っ込めるとともに、自動水栓から離れる動作を開始する。この際にも、手を引っ込める動作に対応して、図16(c)に表したように、検知信号の周波数に加速→減速の変化があらわれる。また、使用者の身体が自動水栓から遠ざかる動作に対応して、検知信号の周波数に加速する変化があらわれる。
【0037】
そして、これらいずれの場合においても、被検知体が自動水栓から遠ざかる動作であることに対応して、図16(b)に表したように、検知信号の振幅が時間とともに減少する。これは、図5(b)、図6(a)、図7(a)に表したように、被検知体が自動水栓に近づく動作においては検知信号の振幅が時間とともに増加することとは対照的である。
【0038】
このように、検知信号の周波数の変化に加えて、振幅の変化を考慮することにより、被検知体の動作が接近に対応するものであるのか、離遠に対応するものであるのか、を判定することができる。本具体例においては、振幅検出部28(図11、図12参照)により検知信号の振幅の検出が可能となる。
【0039】
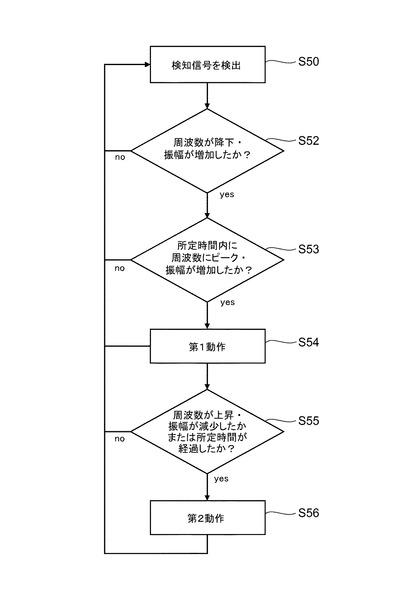
図17は、使用者の離遠まで考慮したフローチャートである。
図14に表した具体例と同様に、検知信号を検出し(ステップS50)、その周波数を周波数検出部22において検出するとともに、振幅を振幅検出部28(図11、図12)において検出する。
そして、検知信号の周波数が図5(c)、図6、図7に例示したように、使用者の体の減速などに対応して所定の降下の傾向を示すとともに、振幅が増加の傾向を示したら(ステップS52:yes)、次の判定のステップに進む。すなわち、判定部24は、所定時間内に、被検知体の加速→減速に対応したピークが検知信号の周波数に表れ、かつ振幅が増加の傾向を示すか否かを調べる(ステップS53)。そして、ピークが現れたと判定すると(ステップS53:yes)、判定部24は、被制御部30に制御信号を出力して所定の第1動作を実行させる(ステップS54)。例えば手指乾燥機の場合には、温風を吹き出す。
【0040】
その後、使用者が自動装置から離れる際には、通常は、加速の動作を伴う。これに対応して、検知信号の周波数は上昇し、またその振幅は減少する。そこで、判定部24は、被検知体の離遠に伴う加速に対応した周波数の上昇が表れ、かつ振幅が減少の傾向を示したと判定すると(ステップS55:yes)、被制御部30に制御信号を出力して所定の第2動作を実行させる(ステップS56)。例えば手指乾燥機の場合には、温風の吹き出しを停止する。また、ステップS55において、第1動作(ステップS54)から所定時間が経過した場合には、ステップS56に進むようにしてもよい。
【0041】
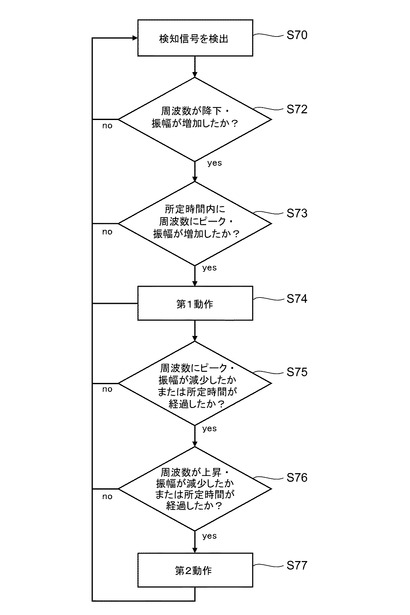
図18は、使用者の離遠動作に伴う動作を実行可能とした自動装置において実行される処理を例示するフローチャートである。
検知信号を検出し(ステップS70)、その周波数を周波数検出部22において検出するとともに、その振幅を振幅検出部28(図11、図12参照)において検出する。そして、図5(b)及び(c)などに例示したように、周波数が降下し、振幅が増加する傾向が認められたら(ステップS72:yes)、使用者が接近していると判断して、次の判定のステップに進む。すなわち、判定部24は、所定時間内に、周波数の変化にピークが表れ、同時に振幅が増加するか否かを調べる(ステップS73)。そして、ピークが現れたと判定すると(ステップS73:yes)、所定の第1動作を実行する(ステップS74)。
【0042】
以上説明したステップは、図8及び図9に関して前述したステップS10〜ステップS16と同様であり、例えば、自動水栓に対して使用者が接近し、手を差し出す動作などに対応する。
そして、本具体例においては、次に、所定時間内に検知信号の周波数が上昇し(またはピークがあらわれ)、振幅が減少するか否かを判定する(ステップS75)。これは、使用者の離遠動作を予備的に検知することに対応する。すなわち、図165(b)及び(c)に表したように、使用者が例えば手を引っ込める場合などには、検知信号の周波数の上昇と、振幅の減少が生ずる。そこで、これらを判定することにより、使用者の離遠動作を予備的に検知することができる。所定の時間内に、検知信号に周波数の所定の上昇と、振幅の所定の減少と、がみられた時には(ステップS75:yes)、次の判定のステップに進む。すなわち、さらに所定時間内に検知信号の周波数が上昇し、振幅が減少するか否かを判定する(ステップS76)。所定の時間内に、検知信号に周波数の所定の上昇と、振幅の所定の減少と、がみられた時には、使用者が離遠動作をしたと判定して(ステップS76:yes)、所定の第2動作を実行する(ステップS77)。
また、ステップS75、S76において、第1動作(ステップS74)から所定時間が経過した場合には、ステップS77に進むようにしてもよい。
【0043】
本具体例によれば、第2動作を実行する際にも、まず予備的な検知をし(ステップS75)その後、本来的な検知(ステップS76)を実行することにより、誤検知に基づく無駄な動作や、誤動作などを防ぐことができる。
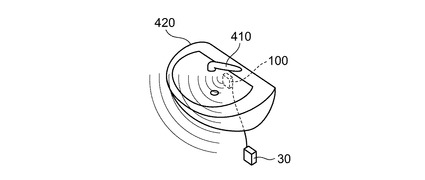
図19は、本実施形態の自動装置の具体例を表す模式図である。
本具体例は、自動水栓であり、流し420にはスパウト410が付設されている。そして、流し420の背後には、センサ部100が設けられ、また、スパウト410からの吐水を制御する電磁開閉弁を有する被制御部30が設けられている。すなわち、センサ部100の検知の結果に基づいて、スパウト410からの吐水を制御する。さらに、スパウト410あるいは流し420の一部に照明などが設けられ、センサ部100の検知の結果に基づいてその点灯を制御してもよい。そして、図1〜図18に関して前述したいずれかの動作を実行可能とされている。
【0044】
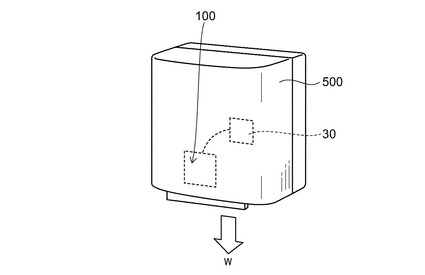
図20は、本実施形態の自動装置のもうひとつの具体例を表す模式図である。
本具体例は、手指乾燥機であり、本体500の中には、センサ部100と、温風吹出部や殺菌灯点灯部などを有する被制御部30と、が設けられている。つまり、センサ部100の検知の結果に基づいて、被制御部30の備えた自動装置の温風吹出部や殺菌灯点灯部などの動作が制御される。本具体例も、図1〜図18に関して前述したいずれかの動作を実行可能とされている。
【0045】
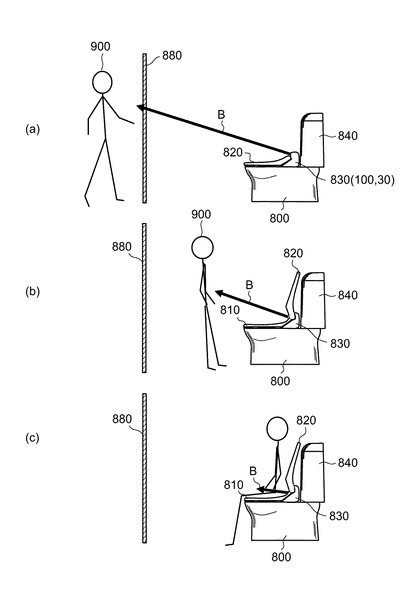
図21は、本実施形態の自動装置のもうひとつの具体例を表す模式図である。
本具体例においては、腰掛便器800の上に、便座810と便蓋820とを軸支した衛生洗浄装置830が設けられている。そして、この衛生洗浄装置830に、センサ部100と被制御部30とが内蔵されている。なお、便器800の上部後方にはロータンク840が設置されている。通常のトイレのドア880は、木製または樹脂であるので、マイクロ波センサから放射される電波ビームBを透過する。従って、衛生洗浄装置830に内蔵したマイクロ波センサにより、トイレのドア880越しに使用者900の存在を検知するとことができる。
【0046】
図21(a)に表したように、使用者900がドア880に接近すると、使用者900の身体は減速する。従って、センサの検知信号の周波数に降下がみられる。また、この状態においては、センサから使用者900までの距離は大きく、ドア880を介しているので、検知信号の振幅は小さい。
【0047】
次に、使用者900がドア880を開けて、図21(b)に表したように便器800の前に立ち止まる。この時にも、使用者900の身体は、加速→減速を経て便器800の前に停止する。従って、センサの検知信号の周波数にピークや周波数の降下がみられる。また、この状態においては、センサから使用者900までの距離は小さくなるので、検知信号の振幅は大きくなる。また、ドア880を開けた際には、振幅にステップ的な上昇が表れる。
【0048】
使用者900は、この後、便座810を開き、立位を保った状態で小用する場合がある。または、使用者900は、身体の向きを反転させ、脱衣後に便座810に座る。使用者が身体を反転させる動作は、動作の速度としては早い成分を含むために、マイクロ波センサの検知信号においては、比較的高い周波数を含む信号として表れる。
図21(c)は、使用者900が便座810に座った状態を表す。使用者900が便座810に座る動作においても、加速→減速が含まれる。従って、センサの検知信号の周波数にピークや周波数の降下がみられる。また、この状態においては、センサから使用者900までの距離はさらに小さくなるので、検知信号の振幅はさらに大きくなる。
一方、これとは逆に、使用者900が便座810から立ち上がる際にも、加速→減速に対応する周波数の変化が検知信号に表れる。同時に、検知信号の振幅も小さくなる。
そして、使用者900が便器800の前からドア880に向かい、ドア880の前で減速する時も、加速→減速に対応する周波数の変化が検知信号に表れる。同時に、検知信号の振幅も小さくなる。
さらに、使用者900がドア880を開けてトイレから退出し、ドアを閉めて立ち去る時には、加速→減速に対応する周波数の変化が検知信号に表れる。同時に、検知信号の振幅もさらに小さくなる。特に、ドア880を閉めることにより、振幅にステップ的な降下が表れる。
【0049】
以上説明したように、使用者900の位置や状態に応じて、センサ部の検知信号にはそれぞれ対応した変化が表れる。従って、これらの変化のいずれか2つ以上を検知し、それに対応して、例えば、照明を点灯または消灯したり、便蓋820を開閉したり、便器800に洗浄水を流したり、便座810のヒータによる加熱を開始または停止したり、などの各種の動作を誤検知なく確実に実行させることができる。
【0050】
以上、具体例を参照しつつ本発明の実施の形態について説明した。しかし、本発明は、これら具体例には限定されない。自動装置を構成するアンテナ、送信部、受信部、ミキサ部、フィルタ、周波数検出部、振幅検出部、判定部などの構造、形状、サイズ、配置関係などに関して各種設計変更を行ったものであっても、本発明の主旨を逸脱しない限り本発明の範囲に包含される。
【0051】
またさらに、本発明の自動装置は、非接触型の入力インタフェースなどにも応用が可能である。例えば、ドアに接近する人間を検知し、さらにその人間が例えば手を下から上に振る動作を検知すると、ドアを自動的に開かせることが可能である。
【図面の簡単な説明】
【0052】
【図1】本発明の実施の形態にかかる自動装置の2つの具体例のブロック図である。
【図2】本発明の実施の形態にかかる自動装置の2つの具体例のブロック図である。
【図3】被検知体の移動速度による検知信号の周波数の変化を模式的に表すグラフ図である。
【図4】移動体の速度と検知信号の周波数の変化との関係を表すグラフ図である。
【図5】検知信号に含まれる周波数の時間変化を説明するための模式図である。
【図6】本発明者が自動水栓について実施した実験の結果を表す模式図である。
【図7】本発明者が自動水栓について実施した実験の結果を表す模式図である。
【図8】図1及び図2に表した自動装置において実行される処理を例示するフローチャートである。
【図9】図1及び図2に表した自動装置において実行される処理のもうひとつの具体例を例示するフローチャートである。
【図10】図1及び図2に表した自動装置において実行される処理を例示するフローチャートである。
【図11】本実施形態のもうひとつの具体例にかかる自動装置のブロック図である。
【図12】本実施形態のもうひとつの具体例にかかる自動装置のブロック図である。
【図13】センサから被検知体までの距離と検知信号との関係を例示するグラフ図である。
【図14】図8に関して前述したフローチャートにおいて、検知信号の振幅についても考慮した具体例である。
【図15】図10に関して前述したフローチャートにおいて、検知信号の振幅についても考慮した具体例である。
【図16】自動水栓を使用した使用者が自動水栓から離れるまでの検知信号を例示する模式図である。
【図17】使用者の離遠動作も検知可能とした自動装置において実行される処理を例示するフローチャートである。
【図18】使用者の離遠動作も検知可能とした自動装置において実行される処理の第2の具体例を例示するフローチャートである。
【図19】本実施形態の自動装置の具体例を表す模式図である。
【図20】本実施形態の自動装置のもうひとつの具体例を表す模式図である。
【図21】本実施形態の自動装置のもうひとつの具体例を表す模式図である。
【符号の説明】
【0053】
10 アンテナ、 10a アンテナ、 10b アンテナ、 12 送信部、 14 受信部、 16 ミキサ部、 20 フィルタ、 22 周波数検出部、 24 判定部、 28 振幅検出部、 30 被制御部、100 センサ部、100A 検知部、100B 処理部、410 スパウト、420 流し、500 本体、800 腰掛便器、810 便座、820 便蓋、830 衛生洗浄装置、840 ロータンク、880 ドア、900 使用者
【技術分野】
【0001】
本発明は、自動装置に関し、より具体的には人体を検知して所定の動作を実行する自動装置に関する。
【背景技術】
【0002】
人体を検知して自動的に吐水などを実行する水栓やトイレなどの自動装置は、衛生的であるばかりでなく、ユニバーサル・デザインの観点からも優れ、節水効果なども得られるため、公共的な施設ばかりでなく一般家庭にも普及が進んでいる。
これら自動装置には、使用者を検知するためのセンサが必要とされる。マイクロ波を便器正面へ発射し、対象物により反射されたマイクロ波を受信して、そのドップラー周波数信号のパワースペクトルを求め、そのピーク値と所定の閾値とを比較することにより、人体を検知する人体検知装置が開示されている(特許文献1)。
【特許文献1】特開平9−80150号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
使用者を検知して自動的に動作をする場合、誤動作や、誤検知による無駄な動作を無くすことが望ましい。
本発明は、かかる観点からなされたものであり、誤動作や誤検知による無駄な動作を防止した自動装置を提供する。
【課題を解決するための手段】
【0004】
本発明の一態様によれば、放射した送信波の被検知体による反射波及び透過波の少なくともいずれかを受信波として受信するアンテナと、前記送信波と前記受信波とに基づいて検知信号を生成するミキサ部と、前記ミキサ部から出力された検知信号の周波数を検出する周波数検出部と、前記周波数検出部による検出の結果に基づいて制御信号を出力する判定部と、前記制御信号により制御される被制御部と、を備え、前記判定部は、前記検知信号の周波数が降下し、その後、前記検知信号の周波数が上昇し、または上昇の後に降下し、または略一定値を維持した後に降下すると前記被制御部に対して第1動作を実行させる制御信号を出力することを特徴とする自動装置が提供される。
【発明の効果】
【0005】
本発明によれば、誤動作や誤検知による無駄な動作を防止した自動装置が提供される。
【発明を実施するための最良の形態】
【0006】
以下、図面を参照しつつ、本発明の実施の形態について説明する。
図1及び図2は、本発明の実施の形態にかかる自動装置の2つの具体例のブロック図である。
【0007】
自動装置は、センサ部100と、被制御部30と、を有する。センサ部100は、検知部100Aと、処理部100Bと、を有する。検知部100Aには、アンテナ10、送信部12、受信部14、ミキサ部16が設けられている。送信部12に接続されたアンテナ10からは、高周波、マイクロ波あるはミリ波などの10kHz〜100GHzの周波数帯の電波が放射される。具体的には、アンテナ10からは、例えば10.525GHzの周波数を有する送信波T1が放射される。人体などの被検知体からの反射波または透過波T2は、アンテナ10を経由して受信部14に入力される。ここで、アンテナは、図1に表したように送信側と受信側とを共通としてもよく、または、図2に表したように、送信部12にはアンテナ10aを接続し、受信部14にはアンテナ10bを接続してもよい。
送信波の一部と受信波とは、ミキサ部16にそれぞれ入力され、ドップラー効果が反映された出力信号が出力される。すなわち、人体などの被検知体が移動すると、ドップラー効果によって反射波の波長がシフトする。ドップラー周波数ΔF(Hz)は、下記の式(1)により表すことができる。
ΔF=Fs−Fb=2×Fs×v/c 式(1)
但し、Fs:送信周波数(Hz)
Fb:反射周波数(Hz)
v:物体の移動速度(m/s)
c:光速(=300×106m/s)
検知部100Aを移動体に向けると、式(1)で表されるように、その速度vに比例した周波数ΔFを含む出力信号を得ることができる。出力信号は周波数スペクトラムを有し、スペクトラムのピークに対応するピーク周波数と移動体の速度vとの間には相関関係がある。従って、ドップラー周波数ΔFを測定することにより速度vを求めることができる。なお、日本においては、人体を検知する目的には10.50〜10.55GHzまたは24.05〜24.25GHzの周波数が使用できる。
【0008】
ミキサ部16から出力された検知信号は、処理部100Bに出力される。処理部100Bには、フィルタ20、周波数検出部22、判定部24が設けられている。ミキサ部16から出力された検知信号は、まずフィルタ20において例えば高周波数成分が取り除かれる。この際のフィルタリング周波数は、例えば100Hzとすることができる。フィルタ20から出力された検知信号の周波数が周波数検出部22において検出される。そして、判定部24は、周波数検出部22によって検出された周波数の変化に基づいて、被制御部30に対して制御信号を適宜出力する。
【0009】
被制御部30は、後に詳述するように、例えば、自動水栓の開閉弁や、手指乾燥機の温風生成部や、衛生洗浄装置の便座ヒータや、便蓋開閉装置や、照明などである。つまり、本実施形態の自動装置は、検知部100Aと処理部100Bによる検知の結果に基づいて、被制御部30を自動的に制御する。
【0010】
図3は、被検知体の移動速度による検知信号の周波数の変化を模式的に表すグラフ図である。ここでは、横軸は時間である。
ここでは便宜的に周波数の変化を検知信号のピーク間の時間により表した。被検知体の速度が低い場合には、検知信号のピーク間の時間が長くなり、検知信号の周波数は低くなる。一方、被検知体の速度が大きい場合には、検知信号のピーク間の時間が短くなり、検知信号の周波数は高くなる。このように、検知信号の周波数の時間変化を監視することにより、被検知体の速度の変化を検出することができる。また、後に詳述するように、検知信号の振幅は、被検知体の大きさや被検知体までの距離に応じて変化する。すなわち、被検知体のサイズが大きいと検知信号の振幅は大きく、また被検知体までの距離が小さいほど検知信号の振幅は大きくなる。
【0011】
図4は、自動装置に接近する使用者の速度と検知信号の周波数の変化との関係を表すグラフ図である。
使用者が目標とする自動装置(例えば、自動水栓)に接近する場合、図4(a)に表したように、通常は、目標物に近づくにつれて、衝突を避けるために減速する。この時、自動装置の検知部100Aにおける検知信号の振幅は図4(b)に表したように徐々に大きくなり、同時にその周波数も図4(c)に表したように徐々に降下する。本実施形態においては、例えばこのような周波数の降下を検出することにより、その自動装置を使用する意思を有する被検知体の接近を高い確度で検知することができる。
【0012】
例えば、自動水栓や温風を吹き出して手指を乾燥させる手指乾燥機などの場合、これを使用する使用者は、まずこれらの自動装置に接近し、しかる後に手を差し出す。この時、使用者の身体が接近する際には、図4に関して前述したようにその速度は徐々に降下する。そして、使用者が目標物に到達すると手を差し出す。例えば、自動水栓の場合には、スパウトの下に向けて手を差し出すが、この時の手の移動速度も、最初は加速し、その後減速してスパウトの下に手が到達する。従って、使用者の体が接近する際の減速動作に続いて、手の加速→減速の動作が実行される。
【0013】
図5は、この時の検知信号に含まれる周波数の時間変化を説明するための模式図である。
前述したように、使用者が自動水栓などの目標物に接近する場合には、まず目標物に近づくにつれて身体が減速する。この時、自動装置における検知信号の振幅は、図5(b)に表したように徐々に大きくなり、同時にその周波数は図5(c)に表したように身体の減速に対応して降下する。
そして、これに続いて使用者は手を差し出す。この時の手の動きは、一般的に、最初は加速し、その後に減速する。従って、検知信号の周波数にも、手の加速→減速の動作に対応したピークが表れる。
本実施形態においては、検知信号の周波数の変化を観察し、周波数が所定の閾値を上回ったり、下回ることにより、被検知体の加速や減速を検出できる。あるいは、図5に例示したような周波数の降下とそれに続くピークPの出現を検出することにより、被検知体の接近や、自動装置の本来的な駆動をさせるために使用者が実行する動作を高い確度で検知することができる。
【0014】
なお、ピークPの有無を判定するに際しては、その加速側Paの周波数の変化(すなわち、周波数の上昇)に基づいて判定してもよく、あるいはその減速側Pbの周波数の変化(すなわち、周波数の降下)に基づいて判定してもよい。あるいは、加速から減速に転ずる周波数の変化(すなわち、変化の方向が反転すること)に基づいて判定してもよい。
【0015】
図6及び図7は、本発明者が自動水栓について実施した実験の結果を表す模式図である。すなわち、これらの図において、(a)は自動装置に設けたセンサの検知信号を表し、(b)はその周波数の時間変化を表す。
【0016】
図6は、自動水栓のセンサの検知範囲内において静止している状態から被検知体が自動水栓に向けて接近を開始し、水栓に到達したら停止して手を差し出す場合を表す。
一方、図7は、自動水栓のセンサの検知範囲よりも外側から被検知体が自動水栓に向けて接近し、自動水栓に到達したら停止して手を差し出す場合を表す。
【0017】
図6に表した具体例の場合、検知信号の周波数の変化をみると、図6(b)に表したように、まず、被検知体の体の移動速度の変化(加速→減速)に応じて緩やかなピークが表れ、それに続いて手の加速→減速のピークが表れる。
【0018】
図7に表した具体例においても、検知信号の周波数の変化をみると、図7(b)に表したように、まず、被検知体の体の移動速度の変化(減速)に応じて周波数の降下が表れ、それに続いて手の加速→減速のピークが表れる。
【0019】
このように、被検知体の身体の接近に対応する周波数の変化と、手を差し出す時の加速→減速の動作に対応する周波数の変化と、を明瞭に分離して検出することが可能であり、自動水栓や手指乾燥機に対する使用者の接近と、手などを差し出す動作と、をそれぞれ検知することが可能である。
【0020】
また、図6及び図7から、人間が歩く速度や手を差し出す速度は検知信号において概ね90Hz以下であることが分かる。従って、本実施形態におけるフィルタ20は、概ね100Hz以下の検知信号を抽出するものであればよい。
【0021】
図8は、図1及び図2に表した自動装置において実行される処理を例示するフローチャートである。
まず、検知信号を検出し(ステップS10)、その周波数を周波数検出部22において検出する。そして、検知信号の周波数が図5(c)、図6、図7に例示したように、使用者の体の減速などに対応して所定の降下の傾向を示したら(ステップS12:yes)、次の判定のステップに進む。すなわち、判定部24は、所定時間内に、手の加速→減速に対応したピークが検知信号の周波数に表れるか否かを調べる(ステップS14)。そして、ピークが現れたと判定すると(ステップS14:yes)、判定部24は、被制御部30に制御信号を出力して所定の第1動作を実行させる(ステップS16)。
【0022】
例えば、図5(c)、図6、図7に例示したように、検知信号の周波数がf1よりも高い状態からf2よりも低い状態に降下したら被検知体が接近していると判定し(ステップS12:yes)、次の判定のステップ(ステップS14)に進む。例えば、検知信号の周波数が所定の閾値f3を越えるか否かを監視する。そして、検知信号の周波数が所定時間内にこの閾値f3を越えたら、手を差し出す動作などに対応したピークが表れたと判断し(ステップS14:yes)、所定の第1動作を実行する。または、検知信号の周波数が閾値f3を越えた後にf3よりも低い状態に再び降下したら、手を差し出す動作などに対応したピークが表れたと判断してもよい(ステップS14:yes)。
【0023】
一方、所定時間内にf3を越えなかった場合、すなわち周波数にピークが表れなかった場合(ステップS14:no)は、使用者は手を差し出さなかった、すなわち接近したが使用の意思がないものと判断してステップS10に戻り、検知信号の監視を続ける。すなわち、動作シーケンスをキャンセルして所期状態に戻り、周波数の最初の降下の監視を開始する。なお、ステップS14において、ピークが表れたか否かを調べる代わりに、周波数が所定の閾値を超えたか否かを基準に判定してもよい。
なお、ステップS14において、検知信号の周波数にピークが表れる代わりに、図9に例示した如く、周波数が略一定値を維持した後に降下した時に、第1動作を実行するようにしてもよい。つまり、図5〜図7に関した具体例において、体が接近し減速した後に手が接近し減速する際に、手を差し出す速度やタイミングによっては、手が接近する際の加速が観測されないこともあり得る。このような場合、体の減速の後に、検知信号の周波数が略一定値を維持し、その後、手の減速に対応して検知信号の周波数が降下する。つまり、(減速)→(等速)→(減速)という速度の変化が観測される場合もあり得る。このような場合には、最初の減速の後、等速の後に観測される減速に応じて制御信号を出力して所定の第1動作を実行させるようにすればよい。
【0024】
以上説明したように、本具体例においては、使用者の体の接近などに対応した周波数の降下を検知すると、それに続く周波数のピークが検知されるか否かを判定する。そして、周波数のピークを検知すると、所定の第1動作を実行する。
以上説明した周波数の降下(ステップS12)、周波数のピーク(ステップS14)、第1動作(ステップS16)について、具体例を挙げると以下の如くである。
まず、自動装置が自動水栓の場合について説明すると、周波数の降下(ステップS12)としては、典型的には、使用者の自動水栓への接近を挙げることができる。次に、周波数のピーク(ステップS14)は、水栓に接近した使用者が、手やコップなどをスパウトに向けて差し出す動作に対応する。そして、第1動作(ステップS16)としては、スパウトや吐水口から吐水する動作を挙げることができる。
【0025】
次に、自動装置が手指乾燥機の場合について説明する。ここで、手指乾燥機は、トイレや洗面台の近傍などに設置され、手洗いなどの後に使用者の手や指などを温風により乾燥させる装置である。
この場合も、周波数の降下(ステップS12)としては、典型的には、使用者の手指乾燥機への接近を挙げることができる。次に、周波数のピーク(ステップS14)は、手指乾燥機に接近した使用者が、手を温風吹出口に向けて差し出す動作に対応する。そして、第1動作(ステップS16)としては、温風を吹き出したり、殺菌灯を点灯する動作を挙げることができる。
【0026】
次に、自動装置が衛生洗浄装置などが付設されたトイレの場合について説明する。ここで、衛生洗浄装置は、腰掛便器に付設され、便座に座った使用者の「おしり」などに水を噴射して洗浄可能としたものである。
この場合には、周波数の降下(ステップS12)としては、典型的には、使用者がトイレに接近したことを挙げることができる。後に詳述するように、マイクロ波を用いたセンサの場合、例えば、トイレ室の内側からドア越しに外側の人体を検知することも可能である。つまり、従来の赤外線測距式のセンサや焦電センサの場合には、使用者がトイレ室に入室しないと検知できなかったが、本実施形態においては、トイレ室のドアの外側で使用者が接近したことも検知できる。
【0027】
次に、周波数のピーク(ステップS14)は、例えば使用者が便座に座る動作に対応する。そして、第1動作(ステップS16)としては、例えば、脱臭機能を動作させたり、便器に洗浄水を流してボウルを予め濡らした状態にしたり、衛生洗浄装置の吐水ノズルへの給水流路に残留した冷水を排出して直ちに温水を噴射可能な状態としたり、衛生洗浄装置の吐水ノズルの表面を洗浄したり、音楽や効果音を鳴らしたり、衛生洗浄装置のリモコンなどの操作部の所定のスイッチを照明したり表示部に特定のメッセージを表示して使用者にガイドしたりする動作を挙げることができる。
【0028】
次に、自動装置が洗面所や浴室などに設置された場合について説明する。
この場合には、周波数の降下(ステップS12)としては、典型的には、洗面所や浴室などへの使用者の接近を挙げることができる。そして、この場合にも、前述したようにドア越しに使用者の接近を検知できるので、従来よりもより早いタイミングで検知することが可能となる。
【0029】
次に、周波数のピーク(ステップS14)は、例えば、洗面台や浴槽などに使用者が接近する動作に対応する。そして、第1動作(ステップS16)としては、洗面台の照明を点灯させたり、電気温水器を適温に制御したり、浴室内の照明を調節したり、洗面所や浴室内の空調の方向を調節したり、ブローバスやミストサウナの運転を開始したり、音楽や効果音を鳴らしたりすることができる。
【0030】
以上説明したように、本実施形態によれば、予備的な検知(ステップS12)と、それに続く本来的な検知(ステップS14)と、が満たされた場合に、所定の第1動作を実行する。その結果として、誤検知に基づく無駄な動作や、誤動作などを防ぐことができる。
例えば、自動装置のそばにカーテンがあり、このカーテンが風で揺れた動きなどを検知して自動装置が誤動作することもあり得る。また例えば、猫や犬などのペットが自動装置の回りを徘徊した時に、その動きを検知して誤動作が生ずることもあり得る。
このような場合に、本実施形形態によれば、自動装置を使用する使用者の予備的な検知と、それに続く本来的な検知と、を満たした場合のみ所定の第1動作を実行することで、誤動作や無駄な動作を防止できる。
【0031】
図10は、図1及び図2に表した自動装置において実行される処理の第2の具体例を表すフローチャートである。
本具体例においても、まず、検知信号を検出し(ステップS20)、その周波数を周波数検出部22において検出する。そして、検知信号の周波数が図5(c)、図6、図7に例示したように、使用者の体の減速などに対応して所定の降下の傾向を示したら(ステップS22:yes)、次の判定のステップに進む。すなわち、判定部24は、所定時間内に、被検知体の加速→減速に対応したピークが検知信号の周波数に表れるか否かを調べる(ステップS24)。そして、ピークが現れたと判定すると(ステップS24:yes)、さらに次の判定のステップに進む。すなわち、判定部24は、所定時間内に、被検知体の加速→減速に対応したピークが再び検知信号の周波数に表れるか否かを調べる(ステップS26)。そして、ピークが現れたと判定すると(ステップS26:yes)、判定部24は、被制御部30に制御信号を出力して所定の第1動作を実行させる(ステップS28)。
【0032】
例えば、自動水栓が設置されている洗面所のドアの外側から使用者が接近する場合、周波数の降下(ステップS22)としては、洗面所の外側からドアの前への使用者の接近を挙げることができる。すなわち、接近してきた使用者は、ドアの前において減速する。本実施形態においては、ドア越しに使用者の減速を周波数の降下として検知することができる。次に、周波数のピーク(ステップS24)は、ドアを開けた使用者が、自動水栓が設置された洗面台に接近する動作に対応する。すなわち、使用者は、洗面台に向けて加速→減速という動作をする。その次の周波数のピーク(ステップS26)は、自動水栓に接近した使用者が、手やコップなどをスパウトに向けて差し出す動作に対応する。そして、第1動作(ステップS28)としては、スパウトや吐水口から吐水する動作を挙げることができる。
【0033】
本具体例においては、2回の予備的な検知(ステップS22、ステップS24)と、それに続く本来的な検知(ステップS26)と、が満たされた場合に、所定の第1動作を実行する。その結果として、誤検知に基づく無駄な動作や、誤動作などを防ぐことができる。
図11及び図12は、本実施形態のもうひとつの具体例にかかる自動装置のブロック図である。これらの図については、既出の図に関して前述したものと同様の要素には同一の符号を付して詳細な説明は省略する。
本変型例においては、振幅検出部28が設けられている。振幅検出部28は、フィルタ20により抽出された検知信号の振幅を調べる。そして、判定部24は、周波数検出部22による検出結果とともに、振幅検出部28の検出結果も参酌して判定を実行する。
【0034】
図13は、センサから被検知体までの距離と検知信号との関係を例示するグラフ図である。
図4や図5などにも例示したように、被検知体が自動装置に接近すると、検知信号の振幅は大きくなる。これとは逆に、使用者が自動装置から遠ざかると、検知信号の振幅は小さくなる。つまり、センサから被検知体までの距離に応じて検知信号の振幅が変化する。
【0035】
図14は、図8及び図9に関して前述したフローチャートにおいて、検知信号の振幅についても考慮した具体例である。
また、図15は、図10に関して前述したフローチャートにおいて、検知信号の振幅についても考慮した具体例である。
これらいずれの具体例においても、使用者(またはその手など)が接近する際には、検知信号の周波数の降下(またはピーク)とともに、検知信号の振幅の増加が観察される。そこで、検知信号の振幅の変化も考慮することにより、より確度の高い検知が可能となる。また、それぞれの検知のステップ(ステップS32、S34、S42、S44、S46)において、振幅の変化を判定する代わりに、振幅にしきい値を設けてもよい。つまり、それぞれの検知のステップにおいて、周波数の変化を判定するとともに、所定のしきい値を設け、検知信号の振幅がこのしきい値を超えた場合には、検知したと判定することもできる。なおこの場合、それぞれの判定のステップにおけるしきい値は、同一ではなく、異なるものとすることができる。
【0036】
図16は、自動水栓を使用した使用者が自動水栓から離れるまでの検知信号を例示する模式図である。
使用者が自動水栓を使用した後は、差し出していた手を引っ込めるとともに、自動水栓から離れる動作を開始する。この際にも、手を引っ込める動作に対応して、図16(c)に表したように、検知信号の周波数に加速→減速の変化があらわれる。また、使用者の身体が自動水栓から遠ざかる動作に対応して、検知信号の周波数に加速する変化があらわれる。
【0037】
そして、これらいずれの場合においても、被検知体が自動水栓から遠ざかる動作であることに対応して、図16(b)に表したように、検知信号の振幅が時間とともに減少する。これは、図5(b)、図6(a)、図7(a)に表したように、被検知体が自動水栓に近づく動作においては検知信号の振幅が時間とともに増加することとは対照的である。
【0038】
このように、検知信号の周波数の変化に加えて、振幅の変化を考慮することにより、被検知体の動作が接近に対応するものであるのか、離遠に対応するものであるのか、を判定することができる。本具体例においては、振幅検出部28(図11、図12参照)により検知信号の振幅の検出が可能となる。
【0039】
図17は、使用者の離遠まで考慮したフローチャートである。
図14に表した具体例と同様に、検知信号を検出し(ステップS50)、その周波数を周波数検出部22において検出するとともに、振幅を振幅検出部28(図11、図12)において検出する。
そして、検知信号の周波数が図5(c)、図6、図7に例示したように、使用者の体の減速などに対応して所定の降下の傾向を示すとともに、振幅が増加の傾向を示したら(ステップS52:yes)、次の判定のステップに進む。すなわち、判定部24は、所定時間内に、被検知体の加速→減速に対応したピークが検知信号の周波数に表れ、かつ振幅が増加の傾向を示すか否かを調べる(ステップS53)。そして、ピークが現れたと判定すると(ステップS53:yes)、判定部24は、被制御部30に制御信号を出力して所定の第1動作を実行させる(ステップS54)。例えば手指乾燥機の場合には、温風を吹き出す。
【0040】
その後、使用者が自動装置から離れる際には、通常は、加速の動作を伴う。これに対応して、検知信号の周波数は上昇し、またその振幅は減少する。そこで、判定部24は、被検知体の離遠に伴う加速に対応した周波数の上昇が表れ、かつ振幅が減少の傾向を示したと判定すると(ステップS55:yes)、被制御部30に制御信号を出力して所定の第2動作を実行させる(ステップS56)。例えば手指乾燥機の場合には、温風の吹き出しを停止する。また、ステップS55において、第1動作(ステップS54)から所定時間が経過した場合には、ステップS56に進むようにしてもよい。
【0041】
図18は、使用者の離遠動作に伴う動作を実行可能とした自動装置において実行される処理を例示するフローチャートである。
検知信号を検出し(ステップS70)、その周波数を周波数検出部22において検出するとともに、その振幅を振幅検出部28(図11、図12参照)において検出する。そして、図5(b)及び(c)などに例示したように、周波数が降下し、振幅が増加する傾向が認められたら(ステップS72:yes)、使用者が接近していると判断して、次の判定のステップに進む。すなわち、判定部24は、所定時間内に、周波数の変化にピークが表れ、同時に振幅が増加するか否かを調べる(ステップS73)。そして、ピークが現れたと判定すると(ステップS73:yes)、所定の第1動作を実行する(ステップS74)。
【0042】
以上説明したステップは、図8及び図9に関して前述したステップS10〜ステップS16と同様であり、例えば、自動水栓に対して使用者が接近し、手を差し出す動作などに対応する。
そして、本具体例においては、次に、所定時間内に検知信号の周波数が上昇し(またはピークがあらわれ)、振幅が減少するか否かを判定する(ステップS75)。これは、使用者の離遠動作を予備的に検知することに対応する。すなわち、図165(b)及び(c)に表したように、使用者が例えば手を引っ込める場合などには、検知信号の周波数の上昇と、振幅の減少が生ずる。そこで、これらを判定することにより、使用者の離遠動作を予備的に検知することができる。所定の時間内に、検知信号に周波数の所定の上昇と、振幅の所定の減少と、がみられた時には(ステップS75:yes)、次の判定のステップに進む。すなわち、さらに所定時間内に検知信号の周波数が上昇し、振幅が減少するか否かを判定する(ステップS76)。所定の時間内に、検知信号に周波数の所定の上昇と、振幅の所定の減少と、がみられた時には、使用者が離遠動作をしたと判定して(ステップS76:yes)、所定の第2動作を実行する(ステップS77)。
また、ステップS75、S76において、第1動作(ステップS74)から所定時間が経過した場合には、ステップS77に進むようにしてもよい。
【0043】
本具体例によれば、第2動作を実行する際にも、まず予備的な検知をし(ステップS75)その後、本来的な検知(ステップS76)を実行することにより、誤検知に基づく無駄な動作や、誤動作などを防ぐことができる。
図19は、本実施形態の自動装置の具体例を表す模式図である。
本具体例は、自動水栓であり、流し420にはスパウト410が付設されている。そして、流し420の背後には、センサ部100が設けられ、また、スパウト410からの吐水を制御する電磁開閉弁を有する被制御部30が設けられている。すなわち、センサ部100の検知の結果に基づいて、スパウト410からの吐水を制御する。さらに、スパウト410あるいは流し420の一部に照明などが設けられ、センサ部100の検知の結果に基づいてその点灯を制御してもよい。そして、図1〜図18に関して前述したいずれかの動作を実行可能とされている。
【0044】
図20は、本実施形態の自動装置のもうひとつの具体例を表す模式図である。
本具体例は、手指乾燥機であり、本体500の中には、センサ部100と、温風吹出部や殺菌灯点灯部などを有する被制御部30と、が設けられている。つまり、センサ部100の検知の結果に基づいて、被制御部30の備えた自動装置の温風吹出部や殺菌灯点灯部などの動作が制御される。本具体例も、図1〜図18に関して前述したいずれかの動作を実行可能とされている。
【0045】
図21は、本実施形態の自動装置のもうひとつの具体例を表す模式図である。
本具体例においては、腰掛便器800の上に、便座810と便蓋820とを軸支した衛生洗浄装置830が設けられている。そして、この衛生洗浄装置830に、センサ部100と被制御部30とが内蔵されている。なお、便器800の上部後方にはロータンク840が設置されている。通常のトイレのドア880は、木製または樹脂であるので、マイクロ波センサから放射される電波ビームBを透過する。従って、衛生洗浄装置830に内蔵したマイクロ波センサにより、トイレのドア880越しに使用者900の存在を検知するとことができる。
【0046】
図21(a)に表したように、使用者900がドア880に接近すると、使用者900の身体は減速する。従って、センサの検知信号の周波数に降下がみられる。また、この状態においては、センサから使用者900までの距離は大きく、ドア880を介しているので、検知信号の振幅は小さい。
【0047】
次に、使用者900がドア880を開けて、図21(b)に表したように便器800の前に立ち止まる。この時にも、使用者900の身体は、加速→減速を経て便器800の前に停止する。従って、センサの検知信号の周波数にピークや周波数の降下がみられる。また、この状態においては、センサから使用者900までの距離は小さくなるので、検知信号の振幅は大きくなる。また、ドア880を開けた際には、振幅にステップ的な上昇が表れる。
【0048】
使用者900は、この後、便座810を開き、立位を保った状態で小用する場合がある。または、使用者900は、身体の向きを反転させ、脱衣後に便座810に座る。使用者が身体を反転させる動作は、動作の速度としては早い成分を含むために、マイクロ波センサの検知信号においては、比較的高い周波数を含む信号として表れる。
図21(c)は、使用者900が便座810に座った状態を表す。使用者900が便座810に座る動作においても、加速→減速が含まれる。従って、センサの検知信号の周波数にピークや周波数の降下がみられる。また、この状態においては、センサから使用者900までの距離はさらに小さくなるので、検知信号の振幅はさらに大きくなる。
一方、これとは逆に、使用者900が便座810から立ち上がる際にも、加速→減速に対応する周波数の変化が検知信号に表れる。同時に、検知信号の振幅も小さくなる。
そして、使用者900が便器800の前からドア880に向かい、ドア880の前で減速する時も、加速→減速に対応する周波数の変化が検知信号に表れる。同時に、検知信号の振幅も小さくなる。
さらに、使用者900がドア880を開けてトイレから退出し、ドアを閉めて立ち去る時には、加速→減速に対応する周波数の変化が検知信号に表れる。同時に、検知信号の振幅もさらに小さくなる。特に、ドア880を閉めることにより、振幅にステップ的な降下が表れる。
【0049】
以上説明したように、使用者900の位置や状態に応じて、センサ部の検知信号にはそれぞれ対応した変化が表れる。従って、これらの変化のいずれか2つ以上を検知し、それに対応して、例えば、照明を点灯または消灯したり、便蓋820を開閉したり、便器800に洗浄水を流したり、便座810のヒータによる加熱を開始または停止したり、などの各種の動作を誤検知なく確実に実行させることができる。
【0050】
以上、具体例を参照しつつ本発明の実施の形態について説明した。しかし、本発明は、これら具体例には限定されない。自動装置を構成するアンテナ、送信部、受信部、ミキサ部、フィルタ、周波数検出部、振幅検出部、判定部などの構造、形状、サイズ、配置関係などに関して各種設計変更を行ったものであっても、本発明の主旨を逸脱しない限り本発明の範囲に包含される。
【0051】
またさらに、本発明の自動装置は、非接触型の入力インタフェースなどにも応用が可能である。例えば、ドアに接近する人間を検知し、さらにその人間が例えば手を下から上に振る動作を検知すると、ドアを自動的に開かせることが可能である。
【図面の簡単な説明】
【0052】
【図1】本発明の実施の形態にかかる自動装置の2つの具体例のブロック図である。
【図2】本発明の実施の形態にかかる自動装置の2つの具体例のブロック図である。
【図3】被検知体の移動速度による検知信号の周波数の変化を模式的に表すグラフ図である。
【図4】移動体の速度と検知信号の周波数の変化との関係を表すグラフ図である。
【図5】検知信号に含まれる周波数の時間変化を説明するための模式図である。
【図6】本発明者が自動水栓について実施した実験の結果を表す模式図である。
【図7】本発明者が自動水栓について実施した実験の結果を表す模式図である。
【図8】図1及び図2に表した自動装置において実行される処理を例示するフローチャートである。
【図9】図1及び図2に表した自動装置において実行される処理のもうひとつの具体例を例示するフローチャートである。
【図10】図1及び図2に表した自動装置において実行される処理を例示するフローチャートである。
【図11】本実施形態のもうひとつの具体例にかかる自動装置のブロック図である。
【図12】本実施形態のもうひとつの具体例にかかる自動装置のブロック図である。
【図13】センサから被検知体までの距離と検知信号との関係を例示するグラフ図である。
【図14】図8に関して前述したフローチャートにおいて、検知信号の振幅についても考慮した具体例である。
【図15】図10に関して前述したフローチャートにおいて、検知信号の振幅についても考慮した具体例である。
【図16】自動水栓を使用した使用者が自動水栓から離れるまでの検知信号を例示する模式図である。
【図17】使用者の離遠動作も検知可能とした自動装置において実行される処理を例示するフローチャートである。
【図18】使用者の離遠動作も検知可能とした自動装置において実行される処理の第2の具体例を例示するフローチャートである。
【図19】本実施形態の自動装置の具体例を表す模式図である。
【図20】本実施形態の自動装置のもうひとつの具体例を表す模式図である。
【図21】本実施形態の自動装置のもうひとつの具体例を表す模式図である。
【符号の説明】
【0053】
10 アンテナ、 10a アンテナ、 10b アンテナ、 12 送信部、 14 受信部、 16 ミキサ部、 20 フィルタ、 22 周波数検出部、 24 判定部、 28 振幅検出部、 30 被制御部、100 センサ部、100A 検知部、100B 処理部、410 スパウト、420 流し、500 本体、800 腰掛便器、810 便座、820 便蓋、830 衛生洗浄装置、840 ロータンク、880 ドア、900 使用者
【特許請求の範囲】
【請求項1】
放射した送信波の被検知体による反射波及び透過波の少なくともいずれかを受信波として受信するアンテナと、
前記送信波と前記受信波とに基づいて検知信号を生成するミキサ部と、
前記ミキサ部から出力された前記検知信号の周波数を検出する周波数検出部と、
前記周波数検出部による検出の結果に基づいて制御信号を出力する判定部と、
前記制御信号により制御される被制御部と、
を備え、
前記判定部は、
前記検知信号の周波数が降下し、その後、前記検知信号の周波数が上昇し、または上昇の後に降下し、または略一定値を維持した後に降下すると、前記被制御部に対して第1動作を実行させる制御信号を出力することを特徴とする自動装置。
【請求項2】
前記判定部は、前記検知信号の周波数が第1の値よりも高い状態から、前記第1の値よりも低い状態まで降下し、その後、前記検知信号の周波数が上昇し、または上昇の後に降下し、または略一定値を維持した後に降下すると、前記第1動作を実行させる制御信号を出力することを特徴とする請求項1記載の自動装置。
【請求項3】
前記判定部は、前記検知信号の周波数が第1の値よりも高い状態から、前記第1の値よりも小さい第2の値よりも低い状態まで降下し、その後、前記検知信号の周波数が上昇し、または上昇の後に降下し、または略一定値を維持した後に降下すると、前記第1動作を実行させる制御信号を出力することを特徴とする請求項1記載の自動装置。
【請求項4】
前記判定部は、前記検知信号の周波数が第1の値よりも高い状態から、前記第1の値よりも低い状態まで降下し、その後、前記検知信号の周波数が前記第1の値よりも高い状態に上昇したら、前記第1動作を実行させる制御信号を出力することを特徴とする請求項1または2に記載の自動装置。
【請求項5】
前記判定部は、前記検知信号の周波数が第1の値よりも高い状態から、前記第1の値よりも小さい第2の値よりも低い状態まで降下した後に、前記第2の値よりも大きい第3の値よりも高い状態に上昇したら、前記第1動作を実行させる制御信号を出力することを特徴とする請求項1または3に記載の自動装置。
【請求項6】
前記判定部は、前記検知信号の周波数が第1の値よりも高い状態から、前記第1の値よりも低い状態まで降下した後に、前記検知信号の周波数が前記第1の値よりも高い状態に上昇し、その後前記第1の値よりも低い状態まで降下したら、前記第1動作を実行させる制御信号を出力することを特徴とする請求項1または2に記載の自動装置。
【請求項7】
前記判定部は、前記検知信号の周波数が第1の値よりも高い状態から、前記第1の値よりも小さい第2の値よりも低い状態まで降下した後に、前記第2の値よりも大きい第3の値よりも高い状態に上昇し、その後前記第3の値よりも低い状態まで降下したら、前記第1動作を実行させる制御信号を出力することを特徴とする請求項1または3に記載の自動装置。
【請求項8】
前記検知信号の振幅を検出する振幅検出部をさらに備え、
前記判定部は、前記検知信号の周波数が降下するとともに前記検知信号の振幅が大きくなり、その後、前記検知信号の周波数が上昇または上昇の後に降下すると、前記被制御部に対して第1動作を実行させる制御信号を出力することを特徴とする請求項1〜7のいずれか1つに記載の自動装置。
【請求項9】
前記検知信号の振幅を検出する振幅検出部をさらに備え、
前記判定部は、前記検知信号の周波数が降下し、その後、前記検知信号の周波数が上昇または上昇の後に降下するとともに前記検知信号の振幅が大きくなると、前記被制御部に対して第1動作を実行させる制御信号を出力することを特徴とする請求項1〜7のいずれか1つに記載の自動装置。
【請求項10】
前記検知信号の振幅を検出する振幅検出部をさらに備え、
前記判定部は、第1動作を実行させる制御信号を出力した後に、前記検知信号の周波数が上昇または上昇の後に降下するとともに前記検知信号の振幅が小さくなると前記被制御部に対して第2動作を実行させる制御信号を出力することを特徴とする請求項1〜7のいずれか1つに記載の自動装置。
【請求項11】
前記第1動作は、吐水であることを特徴とする請求項1〜10のいずれか1つに記載の自動装置。
【請求項12】
前記第1動作は、温風の吹き出しであることを特徴とする請求項1〜10のいずれか1つに記載の自動装置。
【請求項13】
前記判定部は、前記検知信号の周波数が降下した後、所定時間内に前記検知信号の周波数が上昇しない場合には、前記第1動作を実行させる制御信号を出力せずに、前記周波数の最初の降下の監視を開始することを特徴とする請求項1〜12のいずれか1つに記載の自動装置。
【請求項1】
放射した送信波の被検知体による反射波及び透過波の少なくともいずれかを受信波として受信するアンテナと、
前記送信波と前記受信波とに基づいて検知信号を生成するミキサ部と、
前記ミキサ部から出力された前記検知信号の周波数を検出する周波数検出部と、
前記周波数検出部による検出の結果に基づいて制御信号を出力する判定部と、
前記制御信号により制御される被制御部と、
を備え、
前記判定部は、
前記検知信号の周波数が降下し、その後、前記検知信号の周波数が上昇し、または上昇の後に降下し、または略一定値を維持した後に降下すると、前記被制御部に対して第1動作を実行させる制御信号を出力することを特徴とする自動装置。
【請求項2】
前記判定部は、前記検知信号の周波数が第1の値よりも高い状態から、前記第1の値よりも低い状態まで降下し、その後、前記検知信号の周波数が上昇し、または上昇の後に降下し、または略一定値を維持した後に降下すると、前記第1動作を実行させる制御信号を出力することを特徴とする請求項1記載の自動装置。
【請求項3】
前記判定部は、前記検知信号の周波数が第1の値よりも高い状態から、前記第1の値よりも小さい第2の値よりも低い状態まで降下し、その後、前記検知信号の周波数が上昇し、または上昇の後に降下し、または略一定値を維持した後に降下すると、前記第1動作を実行させる制御信号を出力することを特徴とする請求項1記載の自動装置。
【請求項4】
前記判定部は、前記検知信号の周波数が第1の値よりも高い状態から、前記第1の値よりも低い状態まで降下し、その後、前記検知信号の周波数が前記第1の値よりも高い状態に上昇したら、前記第1動作を実行させる制御信号を出力することを特徴とする請求項1または2に記載の自動装置。
【請求項5】
前記判定部は、前記検知信号の周波数が第1の値よりも高い状態から、前記第1の値よりも小さい第2の値よりも低い状態まで降下した後に、前記第2の値よりも大きい第3の値よりも高い状態に上昇したら、前記第1動作を実行させる制御信号を出力することを特徴とする請求項1または3に記載の自動装置。
【請求項6】
前記判定部は、前記検知信号の周波数が第1の値よりも高い状態から、前記第1の値よりも低い状態まで降下した後に、前記検知信号の周波数が前記第1の値よりも高い状態に上昇し、その後前記第1の値よりも低い状態まで降下したら、前記第1動作を実行させる制御信号を出力することを特徴とする請求項1または2に記載の自動装置。
【請求項7】
前記判定部は、前記検知信号の周波数が第1の値よりも高い状態から、前記第1の値よりも小さい第2の値よりも低い状態まで降下した後に、前記第2の値よりも大きい第3の値よりも高い状態に上昇し、その後前記第3の値よりも低い状態まで降下したら、前記第1動作を実行させる制御信号を出力することを特徴とする請求項1または3に記載の自動装置。
【請求項8】
前記検知信号の振幅を検出する振幅検出部をさらに備え、
前記判定部は、前記検知信号の周波数が降下するとともに前記検知信号の振幅が大きくなり、その後、前記検知信号の周波数が上昇または上昇の後に降下すると、前記被制御部に対して第1動作を実行させる制御信号を出力することを特徴とする請求項1〜7のいずれか1つに記載の自動装置。
【請求項9】
前記検知信号の振幅を検出する振幅検出部をさらに備え、
前記判定部は、前記検知信号の周波数が降下し、その後、前記検知信号の周波数が上昇または上昇の後に降下するとともに前記検知信号の振幅が大きくなると、前記被制御部に対して第1動作を実行させる制御信号を出力することを特徴とする請求項1〜7のいずれか1つに記載の自動装置。
【請求項10】
前記検知信号の振幅を検出する振幅検出部をさらに備え、
前記判定部は、第1動作を実行させる制御信号を出力した後に、前記検知信号の周波数が上昇または上昇の後に降下するとともに前記検知信号の振幅が小さくなると前記被制御部に対して第2動作を実行させる制御信号を出力することを特徴とする請求項1〜7のいずれか1つに記載の自動装置。
【請求項11】
前記第1動作は、吐水であることを特徴とする請求項1〜10のいずれか1つに記載の自動装置。
【請求項12】
前記第1動作は、温風の吹き出しであることを特徴とする請求項1〜10のいずれか1つに記載の自動装置。
【請求項13】
前記判定部は、前記検知信号の周波数が降下した後、所定時間内に前記検知信号の周波数が上昇しない場合には、前記第1動作を実行させる制御信号を出力せずに、前記周波数の最初の降下の監視を開始することを特徴とする請求項1〜12のいずれか1つに記載の自動装置。
【図1】


【図2】
【図4】
【図5】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図3】
【図6】
【図7】
【図2】
【図4】
【図5】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図3】
【図6】
【図7】
【公開番号】特開2009−63348(P2009−63348A)
【公開日】平成21年3月26日(2009.3.26)
【国際特許分類】
【出願番号】特願2007−230002(P2007−230002)
【出願日】平成19年9月5日(2007.9.5)
【出願人】(000010087)TOTO株式会社 (3,889)
【Fターム(参考)】
【公開日】平成21年3月26日(2009.3.26)
【国際特許分類】
【出願日】平成19年9月5日(2007.9.5)
【出願人】(000010087)TOTO株式会社 (3,889)
【Fターム(参考)】
[ Back to top ]