
自動製パン器
【課題】穀物粒から安定して出来の良いパンを製造できる自動製パン器を提供する。
【解決手段】自動製パン器1の制御手段によって実行される穀物粒用製パンコースには、パン容器に投入された穀物粒と液体との混合物を粉砕手段によって粉砕する粉砕工程と、穀物粒の粉砕粉を含むパン容器内のパン原料を混練手段によってパン生地に練り上げる練り工程と、練り上げられたパン生地を発酵させる発酵工程と、発酵させたパン生地を焼成する焼成工程と、が含まれ、前記制御手段は、膨らみ検知手段から得られる情報に基づいて、発酵工程の途中でガス抜きを行うか否かを判断するとともに、発酵工程においてパン生地が所定の高さを超えて膨らまないように制御を行う。
【解決手段】自動製パン器1の制御手段によって実行される穀物粒用製パンコースには、パン容器に投入された穀物粒と液体との混合物を粉砕手段によって粉砕する粉砕工程と、穀物粒の粉砕粉を含むパン容器内のパン原料を混練手段によってパン生地に練り上げる練り工程と、練り上げられたパン生地を発酵させる発酵工程と、発酵させたパン生地を焼成する焼成工程と、が含まれ、前記制御手段は、膨らみ検知手段から得られる情報に基づいて、発酵工程の途中でガス抜きを行うか否かを判断するとともに、発酵工程においてパン生地が所定の高さを超えて膨らまないように制御を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、主として一般家庭で使用される自動製パン器に関する。
【背景技術】
【0002】
市販の家庭用自動製パン器は、パン原料を入れたパン容器を本体内の焼成室に入れ、パン容器内のパン原料を混練ブレードで混練して練り上げ(練り工程)、発酵工程を経た後に、パン容器をそのままパン焼き型としてパンを焼き上げる(焼成工程)仕組みのものが一般的である(例えば特許文献1参照)。
【0003】
従来においては、このような自動製パン器を用いてパンを製造する場合、小麦や米などの穀物を製粉した粉(小麦粉、米粉等)や、そのような製粉した粉に各種の補助原料を混ぜたミックス粉を入手し、これをパン原料として用いることによってパンを製造していた。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2000−116526号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、一般家庭においては米粒に代表されるように、粉の形態ではなく粒の形態で穀物を所持していることがある。このために、自動製パン器を用いて穀物粒から直接パンを製造することができれば非常に便利である。このようなことから、本出願人らは、鋭意研究の末、穀物粒を出発原料としてパンを製造する方法を発明している。なお、これについては、先に特許出願を行っている(特願2008−201507)。
【0006】
先に出願したパンの製造方法について紹介しておく。このパンの製造方法では、まず、穀物粒と液体との混合物の中で粉砕ブレードを回転させて穀物粒の粉砕を行う(粉砕工程)。そして、粉砕工程を経て得られたペースト状の粉砕粉に例えばグルテンやイースト等を加え、混練ブレードによって生地に練り上げ(練り工程)、生地を発酵(発酵工程)させた後、パンに焼き上げる(焼成工程)。
【0007】
本出願人らは、上記の製造工程を適用した自動製パン器について現在開発中であり、この開発段階の自動製パン器を用いて穀物粒からパンを製造した場合に、パンの出来栄えにばらつきが生じることがあった。このようなばらつきは、例えば、自動製パン器が置かれる環境温度の変動、原料として用いる穀物粒の硬さ等のばらつき、パン原料の投入量の誤差等に原因があると考えられた。穀物粒からパンを製造できる自動製パン器は、家庭でのパン製造をより身近なものとできるといったメリットを有するが、このようにパンの出来栄えが不安定であると、ユーザの家庭でのパン作りに対する意欲を喪失しかねない。
【0008】
そこで、本発明は、穀物粒から安定して出来の良いパンを製造できる自動製パン器を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するために本発明の自動製パン器は、パン原料が投入されるパン容器と、パン原料として前記パン容器に投入された穀物粒を粉砕する粉砕手段と、前記パン容器内のパン原料をパン生地に練り上げる混練手段と、前記パン容器内のパン原料を加熱する加熱手段と、前記パン容器内のパン生地が所定の高さまで膨らんだことを検知する膨らみ検知手段と、前記粉砕手段、前記混練手段、及び前記加熱手段を制御して、穀物粒を用いてパンを焼き上げる穀物粒用製パンコースを実行させる制御手段と、を備え、前記穀物粒用製パンコースには、前記パン容器に投入された穀物粒と液体との混合物を前記粉砕手段によって粉砕する粉砕工程と、前記穀物粒の粉砕粉を含む前記パン容器内のパン原料を前記混練手段によってパン生地に練り上げる練り工程と、練り上げられたパン生地を発酵させる発酵工程と、発酵させたパン生地を焼成する焼成工程と、が含まれ、前記制御手段は、前記膨らみ検知手段から得られる情報に基づいて、前記発酵工程の途中でガス抜きを行うか否かを判断するとともに、前記発酵工程においてパン生地が前記所定の高さを超えて膨らまないように制御を行うことを特徴としている。
【0010】
なお、本明細書においては、パン原料なる語は、パンを焼き上げるもとになる材料に対して広い意味で用いており、パン生地とされた状態に対してもパン原料なる語を用いる場合がある。
【0011】
本構成によれば、膨らみ検知手段からの情報に基づいて、適宜、発酵工程の途中でガス抜きを行うようになっているために、発酵工程を経たパン生地内に大きな空洞ができるのを抑制することができ、出来の良い(上質の)パンを焼き上げられる。また、膨らみ検知手段からの情報に基づいて、パン生地が所定の高さを超えて膨らまないようにしているために、発酵工程におけるパン生地の取り扱いが不十分であることが原因となって不出来なパンが製造される可能性を低減できる。更に、パン生地が所定の高さを超えて膨らまないようになっているために、自動製パン器の蓋にパン生地が付着するという事態を避けられる。
【0012】
上記構成の自動製パン器において、前記制御手段は、前記発酵工程が開始されてから第1の所定時間が経過するまでに、前記膨らみ検知手段が検知状態となった場合には、検知状態となった段階で前記ガス抜きを行うことなく前記発酵工程を終了させ、前記第1の所定時間が経過するまでに前記膨らみ検知手段が検知状態とならない場合には、前記混練手段を用いて前記ガス抜きを実行させる場合があることとしてもよい。
【0013】
本構成によれば、発酵工程の時間が長時間となることなくパン生地が所望の状態に膨らんだ場合(この場合にはパン生地内に大きな空洞ができている可能性が低い)に、ガス抜きを行うことなく発酵工程を終了させるようにできる。そして、発酵工程の時間が長時間となった場合(この場合にはパン生地内に大きな空洞ができている可能性がある)には、適宜、発酵工程の途中にガス抜きを行うようにできる。このために、発酵工程を経たパン生地内に大きな空洞ができるのを適切に抑制して、上質のパンを焼き上げられる。
【0014】
上記構成の自動製パン器において、前記制御手段は、前記発酵工程が開始されてから前記第1の所定時間より長い第2の所定時間が経過するまでに前記膨らみ検知手段が検知状態となった場合には、検知状態となった段階で前記ガス抜きを実行させ、前記第2の所定時間が経過するまでに前記膨らみ検知手段が検知状態とならない場合には、前記ガス抜きを行うことなく前記発酵工程を終了させることとしてもよい。
【0015】
本構成によれば、発酵工程の時間が長時間となってパン生地内に大きな空洞ができている可能性が高い状態を適切に判断してガス抜きを行うようになっている。このために、本構成によれば、上質のパンを安定して得ることが可能である。
【0016】
上記構成の自動製パン器において、前記制御手段は、前記ガス抜きが実行された場合に、前記ガス抜きが終了してから第3の所定時間が経過するまでに前記膨らみ検知手段が検知状態となった場合には、検知状態となった段階で前記発酵工程を終了させ、前記第3の所定時間が経過するまでに前記膨らみ検知手段が検知状態とならない場合には、前記第3の所定時間が経過した段階で前記発酵工程を終了させることとしてよい。
【0017】
本構成によれば、発酵工程でガス抜きを行った場合に、ガス抜き後にパン生地が適切に膨らんだ段階で発酵工程を終了させることができる。また、ガス抜き後におけるパン生地の膨らみが悪い場合に、所定時間(第3の所定時間)が経過した段階で発酵工程を終了させるようになっているために、パンの製造工程が長くなりすぎるのを防止できる。
【0018】
上記構成の自動製パン器において、前記膨らみ検知手段は、発光素子からの光を受光素子により受光可能に設けられ、受光状態の変化に基づいてパン生地が前記所定の高さまで膨らんだことを検知するフォトインタラプタであることとしてもよい。
【0019】
本構成によれば、膨らみを検知する手段を得るために大きなスペースが取られないようにできる。また、特にユーザの手を煩わせることなく膨らみを検知できる状態が得られるために、ユーザにとっても使い勝手がよい。
【0020】
上記構成の自動製パン器において、前記粉砕手段は、粉砕ブレードと前記粉砕ブレードを回転させる粉砕モータとを含み、前記混練手段は、混練ブレードと前記混練ブレードを回転させる混練モータとを含み、前記粉砕工程と前記練り工程とのうちの少なくともいずれか一方において、前記制御手段は、モータの負荷を監視し、その負荷に基づいて実行中の工程の終了判断を行うこととしてもよい。
【0021】
自動製パン器を用いて穀物粒からパンを製造する場合、例えば穀物粒の硬さのばらつきや自動製パン器が置かれる環境(主に温度)変動によって、粉砕工程の終了時に得られる粉砕粉の粒度や、練り工程の終了時に得られるパン生地の弾力性等にばらつきが発生することがある。この点、本構成では、モータの負荷を基準に粉砕工程及び/又は練り工程の終了時点を判断する構成であるために、粉砕工程や練り工程の終了時のパン原料(パン生地も含む)の状態を安定させることができる。このため、不出来なパンができる可能性を低減できる。なお、粉砕工程と練り工程との両方において、モータの負荷に基づいて終了時点を判断する構成とするのが好ましい。
【0022】
上記構成の自動製パン器において、前記穀物粒用製パンコースには、前記粉砕工程の前に前記パン容器内の穀物粒に液体を吸液させる粉砕前吸液工程が更に含まれるのが好ましい。本構成によれば、穀物粒に液体(代表的なものは水)を含ませた状態で粉砕を行えるので、穀物粒を芯まで粉砕しやすくなる。
【0023】
上記構成の自動製パン器において、前記穀物粒用製パンコースには、前記粉砕工程の後に前記パン容器内の穀物粒の粉砕粉に液体を吸液させる粉砕後吸液工程が更に含まれるのが好ましい。本構成によれば、粉砕後吸液工程によって、粉砕工程で上昇した粉砕粉の温度を冷却する期間が得られるために、冷却装置を用いることなくパンの製造が可能となり、自動製パン器に要するコストを抑制できる。また、この工程によって、粉砕粉が更に崩れて微粒子の量が多くできるために、きめが細く、美味しいパンが焼き上げられる。
【0024】
上記構成の自動製パン器において、外気温度、前記パン容器の温度、前記パン容器周辺の温度、及び前記パン容器内のパン原料温度のうちの少なくともいずれか1つを検知可能な温度検知手段を更に備え、前記穀物粒用製パンコースが実行される場合に行われる複数の工程の中に、前記温度検知手段で検知される温度を利用して工程時間を変動させる工程が少なくとも1つ含まれていることとしてもよい。
【0025】
自動製パン器が置かれる環境によって、穀物粒から焼き上げられるパンの出来栄えが変動する要因に、環境温度や使用する水等の温度が変動することが挙げられる。この点、本構成の自動製パン器では、外気温度、パン原料を投入する容器の温度、前記容器周辺の温度、及び前記容器内のパン原料温度のうちの少なくとも1つを検知可能な温度検知手段を備える構成としている。そして、本構成では、穀物粒用製パンコースが実行される場合に行われる複数の工程の中に、前記温度検知手段で検知される温度を利用して工程時間を変動させる工程が少なくとも1つ含まれるようになっている。このために、環境温度等によってパンの出来栄えが変動する可能性を低減可能である。
【発明の効果】
【0026】
本発明によると、穀物粒から安定して出来の良いパンを製造することが可能になる。このために、家庭でのパン製造をより身近なものとして、家庭でのパン作りが盛んになることが期待できる。
【図面の簡単な説明】
【0027】
【図1】本実施形態の自動製パン器の垂直断面図
【図2】図1に示す本実施形態の自動製パン器を図1と直角の方向に切断した一部垂直断面図
【図3】本実施形態の自動製パン器が備える粉砕ブレード及び混練ブレードの構成を説明するための概略斜視図
【図4】本実施形態の自動製パン器が備える粉砕ブレード及び混練ブレードの構成を説明するための概略平面図
【図5】混練ブレードが折り畳み姿勢にある場合のパン容器の上面図
【図6】混練ブレードが開き姿勢にある場合のパン容器の上面図
【図7】混練ブレードが開き姿勢にある場合のクラッチの状態を示す概略平面図
【図8】本実施形態の自動製パン器の制御ブロック図
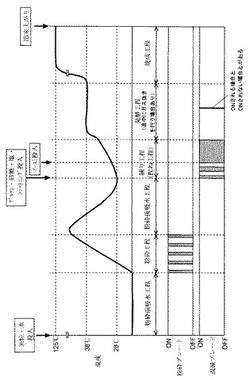
【図9】本実施形態の自動製パン器における米粒用製パンコースの流れを示す模式図
【図10】本実施形態の自動製パン器で使用される、温度に対応付けて粉砕前吸水工程の時間を定めたテーブルの一例
【図11】本実施形態の自動製パン器において実行される粉砕工程の詳細フローを示すフローチャート
【図12】本実施形態の自動製パン器において実行される粉砕後吸水工程の詳細フローを示すフローチャート
【図13】本実施形態の自動製パン器において実行される練り工程の詳細フローを示すフローチャート
【図14】本実施形態の自動製パン器において実行される発酵工程の詳細フローを示すフローチャート
【発明を実施するための形態】
【0028】
以下、本発明の自動製パン器の実施形態について、図面を参照しながら詳細に説明する。なお、本明細書に登場する具体的な時間や温度等はあくまでも例示であり、本発明の内容を限定するものではない。
(自動製パン器の構成)
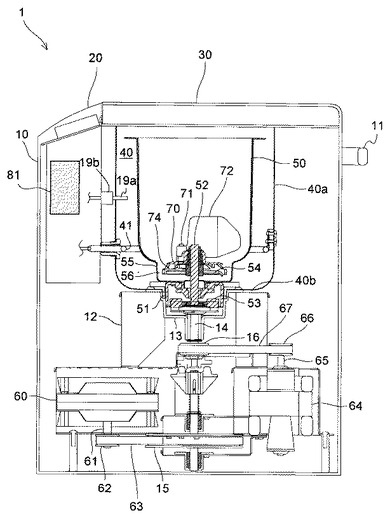
図1は、本実施形態の自動製パン器の垂直断面図である。図2は、図1に示す本実施形態の自動製パン器を図1と直角の方向に切断した一部垂直断面図である。図3は、本実施形態の自動製パン器が備える粉砕ブレード及び混練ブレードの構成を説明するための概略斜視図で、斜め下方から見た場合の図である。図4は、本実施形態の自動製パン器が備える粉砕ブレード及び混練ブレードの構成を説明するための概略平面図で、下から見た場合の図である。図5は、混練ブレードが折り畳み姿勢にある場合のパン容器の上面図である。図6は、混練ブレードが開き姿勢にある場合のパン容器の上面図である。以下、主に図1から図6を参照しながら、自動製パン器の全体構成について説明する。
【0029】
なお、以下においては、図1における左側が自動製パン器1の正面(前面)、右側が自動製パン器1の背面(後面)とする。また、自動製パン器1に正面から向き合った観察者の左手側が自動製パン器1の左側、右手側が自動製パン器1の右側であるものとする。
【0030】
自動製パン器1は、合成樹脂製の外殻により構成される箱形の本体10を有する。本体10には、その左側面と右側面の両端に連結したコの字状の合成樹脂製ハンドル11が設けられ、これにより運搬容易となっている。本体10の上面前部には操作部20が設けられる。操作部20には、図示は省略するが、スタートキー、取り消しキー、タイマーキー、予約キー、パンの製造コース(米粉パンコース、小麦粉パンコース等)を選択する選択キー等の操作キー群と、操作キー群によって設定された内容やエラー等を表示する表示部が設けられている。なお、表示部は、液晶表示パネルと、発光ダイオードを光源とする表示ランプとによって構成されている。
【0031】
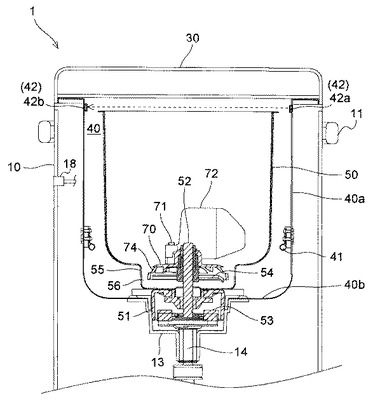
操作部20から後ろの本体上面は、合成樹脂製の蓋30で覆われる。蓋30は、図示しない蝶番軸で本体10の背面側に取り付けられており、その蝶番軸を支点として垂直面内で回動する構成となっている。なお、図示しないが、蓋30には耐熱ガラスからなる覗き窓が設けられており、後述の焼成室40を覗けるようになっている。
【0032】
本体10の内部には、平面形状略矩形の焼成室40が設けられている。焼成室40は板金製で、上面が開口しており、ここからパン容器50が入れられる。焼成室40は水平断面略矩形の4つの周側壁40aと底壁40bとを備える。焼成室40の内部には、シーズヒータ41が焼成室40に収容されたパン容器50を包囲するように配置され、パン容器50内のパン原料を加熱できるようになっている。
【0033】
また、焼成室40を構成する4つの周側壁40aのうち、自動製パン器1の左右側に位置する一対の周側壁には、その一方側に発光素子42aが、他方側に受光素子42bが取り付けられている。この発光素子42aと受光素子42bとはフォトインタラプタを構成する。発光素子42aと受光素子42bとは、焼成室40にパン容器50が収容された状態において、パン容器50の上面よりやや高い位置に設けられている。これにより、通常状態においては、発光素子42aからの光が受光素子42bによって受光されるようになっている。そして、パン生地がパン容器50の上面から所定の高さ(例えば5mm等)まで膨らんだ場合に、受光素子42bの受光状態が変化するために、そのことを検知できるようになっている。すなわち、発光素子42aと受光素子42bとは、パン容器50内のパン生地が所定の高さまで膨らんだことを検知する膨らみ検知部42として機能する。
【0034】
なお、発光素子42aと受光素子42bとには、フォトインタラプタを構成する素子として公知の素子を用いればよいが、例えば発光素子42aには近赤外LED(Light emitting diode)等が用いられ、受光素子42bにはフォトトランジスタ等が用いられる。
【0035】
また、本体10の内部には板金製の基台12が設置されている。基台12には、焼成室40の中心にあたる箇所に、アルミニウム合金のダイキャスト成型品からなるパン容器支持部13が固定されている。パン容器支持部13の内部は焼成室40の内部に露出している。
【0036】
パン容器支持部13の中心には原動軸14が垂直に支持されている。原動軸14に回転を与えるのはプーリ15、16である。プーリ15と原動軸14の間、及び、プーリ16と原動軸14の間には、各々クラッチが配置されていて、プーリ15を一方向に回転させて原動軸14に回転を伝える時、原動軸14の回転はプーリ16に伝わらず、プーリ16をプーリ15とは逆方向に回転させて原動軸14に回転を伝えるとき、原動軸14の回転はプーリ15には伝わらない仕組みになっている。
【0037】
プーリ15を回転させるのは、基台12に固定された混練モータ60である。混練モータ60は竪軸であって、下面から出力軸61が突出する。出力軸61には、プーリ15にベルト63で連結されるプーリ62が固定されている。混練モータ60自身が低速・高トルクタイプであり、その上、プーリ62がプーリ15を減速回転させるので、原動軸14は低速・高トルクで回転する。
【0038】
プーリ16を回転させるのは同じく基台12に支持された粉砕モータ64である。粉砕モータ64も竪軸であって、上面から出力軸65が突出する。出力軸65には、プーリ16にベルト67で連結されるプーリ66が固定されている。粉砕モータ64は、後述する粉砕ブレードに高速回転を与える役割を担う。そのため、粉砕モータ64には高速回転のものが選定され、プーリ66とプーリ16の減速比はほぼ1:1になるように設定されている。
【0039】
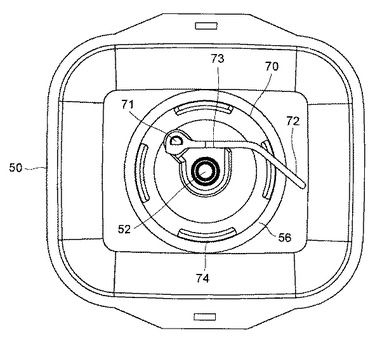
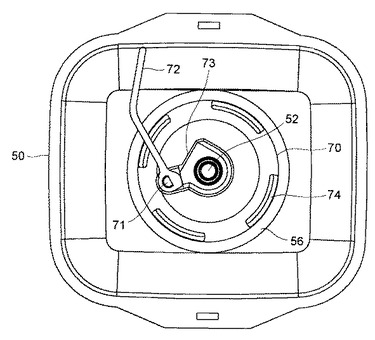
パン容器50は板金製で、バケツのような形状をしており、口縁部には手提げ用のハンドル(図示せず)が取り付けられている。パン容器50の水平断面は四隅を丸めた矩形である。また、パン容器50の底部には、詳細は後述する粉砕ブレード54とカバー70を収容する凹部55が形成されている。凹部55は平面形状円形で、カバー70の外周部と凹部55の内面の間には、製パン原料の流動を可能とする隙間56が設けられている。また、パン容器50の底面には、アルミニウム合金のダイキャスト成型品である筒状の台座51が設けられている。パン容器50は、この台座51がパン容器支持部13に受け入れられた状態で、焼成室40内に配置されるようになっている。
【0040】
パン容器50の底部中心には、垂直方向に延びるブレード回転軸52が、シール対策が施された状態で支持されている。ブレード回転軸52には、原動軸14よりカップリング53を介して回転力が伝えられる。カップリング53を構成する2部材のうち、一方の部材はブレード回転軸52の下端に固定され、他の部材は原動軸14の上端に固定されている。カップリング53の全体は、台座51とパン容器支持部13に囲い込まれる。
【0041】
パン容器支持部13の内周面と台座51の外周面とには、それぞれ図示しない突起が形成されており、これらの突起は周知のバヨネット結合を構成する。詳細には、パン容器50をパン容器支持部13に取り付ける際、台座51の突起がパン容器支持部13の突起に干渉しないようにしてパン容器50を下ろす。そして、台座51がパン容器支持部13に嵌り込んだ後、パン容器50を水平にひねると、パン容器支持部13の突起の下面に台座51の突起が係合する。これにより、パン容器50が上方に抜けなくなる。また、この操作で、カップリング53の連結も同時に達成される。
【0042】
なお、パン容器50取り付け時のひねり方向は、後述する混練ブレード72の回転方向に一致させ、混練ブレード72が回転してもパン容器50が外れないように構成される。
【0043】
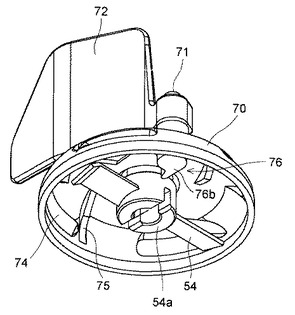
ブレード回転軸52には、パン容器50の底部より少し上の箇所に、粉砕ブレード54が取り付けられている。粉砕ブレード54は、ブレード回転軸52に対して回転不能に取り付けられる。粉砕ブレード54は、ステンレス鋼板製であり、図3及び図4に示すように、飛行機のプロペラのような形状(この形状はあくまでも一例である)を有している。粉砕ブレード54は、ブレード回転軸52から引き抜いて取り外せるようになっており、製パン作業終了後の洗浄や、切れ味が悪くなった時の交換を手軽に行うことができる。
【0044】
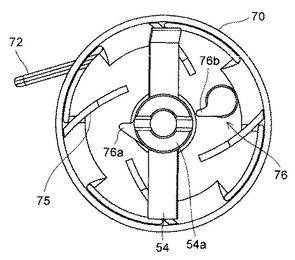
ブレード回転軸52の上端には、平面形状円形のドーム状カバー70が回転可能に取り付けられている。カバー70は、アルミニウム合金のダイキャスト成型品からなり、粉砕ブレード54のハブ54aによって受け止められ、粉砕ブレード54を覆い隠す。このカバー70もブレード回転軸52から簡単に引き抜くことができるので、製パン作業終了後の洗浄を手軽に行うことができる。
【0045】
カバー70の上部外面には、ブレード回転軸52から離れた箇所に配置された垂直方向に延びる支軸71により、平面形状「く」の字形の混練ブレード72が取り付けられている。混練ブレード72はアルミニウム合金のダイキャスト成型品である。支軸71は、混練ブレード72に固定ないし一体化されており、混練ブレード72と動きを共にする。
【0046】
混練ブレード72は、支軸71を中心として水平面内で回動し、図5に示す折り畳み姿勢と、図6に示す開き姿勢とをとる。折り畳み姿勢では、混練ブレード72はカバー70に形成したストッパ部73に当接しており、それ以上カバー70に対し時計方向の回動を行うことができない。混練ブレード72の先端は、この時、カバー70から少し突き出している。開き姿勢では、混練ブレード72の先端はストッパ部73から離れ、混練ブレード72の先端はカバー70から大きく突き出す。
【0047】
なお、カバー70には、カバー内空間とカバー外空間を連通する窓74と、各窓74に対応して内面側に設けられて粉砕ブレード54によって粉砕された粉砕物を窓74の方向に誘導するリブ75と、が形成されている。この構成により、粉砕ブレード54を用いた粉砕の効率が高められている。
【0048】
カバー70とブレード回転軸52の間には、図4に示すようにクラッチ76が介在する。クラッチ76は、混練モータ60が原動軸14を回転させるときのブレード回転軸52の回転方向(この回転方向を「正方向回転」とする。図4では時計方向回転となる。)において、ブレード回転軸52とカバー70を連結する。逆に、粉砕モータ64が原動軸14を回転させるときのブレード回転軸52の回転方向(この回転方向を「逆方向回転」とする。図4では反時計方向回転となる。)では、クラッチ76はブレード回転軸52とカバー70の連結を切り離す。なお、図5及び図6では、前記「正方向回転」は反時計方向回転となり、前記「逆方向回転」は時計方向回転となる。
【0049】
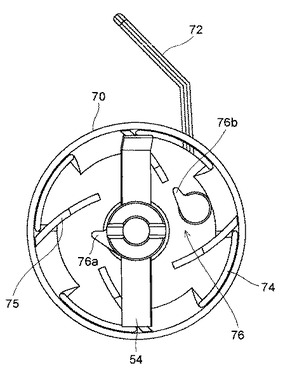
クラッチ76は、混練ブレード72の姿勢に応じて連結状態を切り換える。すなわち、混練ブレード72が図5に示す折り畳み姿勢にある場合は、図4に示すように、第2係合体76b(例えば支軸71に固定される)は第1係合体76a(例えば粉砕ブレード54のハブ54aに固定される)の回転軌道に干渉しており、ブレード回転軸52が正方向回転すると、第1係合体76aと第2係合体76bは係合し、ブレード回転軸52の回転力がカバー70及び混練ブレード72に伝達される。一方、混練ブレード72が図6に示す開き姿勢にある場合には、図7に示すように、第2係合体76bは第1係合体76aの回転軌道から逸脱した状態にあり、ブレード回転軸52が逆方向回転しても、第1係合体76aと第2係合体76bは係合しない。従って、ブレード回転軸52の回転力はカバー70及び混練ブレード72に伝達されない。なお、図7は、混練ブレードが開き姿勢にある場合のクラッチの状態を示す概略平面図である。
【0050】
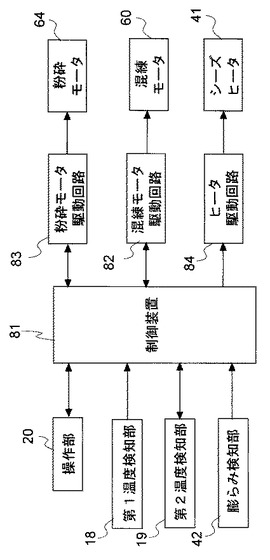
図8は、本実施形態の自動製パン器の制御ブロック図である。図8に示すように、自動製パン器1における制御動作は制御装置81によって行われる。制御装置81は、例えば、CPU(Central Processing Unit)、ROM(Read Only Memory)、RAM(Random Access Memory)、I/O(input/output)回路部等からなるマイクロコンピュータ(マイコン)によって構成される。この制御装置81は、焼成室40の熱の影響を受け難い位置に配置するのが好ましく、自動製パン器1においては、本体10の正面側壁と焼成室40との間に配置されている。
【0051】
制御装置81には、第1温度検知部18と、第2温度検知部19と、上述の操作部20と、上述の発光素子42aと受光素子42bとで構成される膨らみ検知部42と、混練モータ駆動回路82と、粉砕モータ駆動回路83と、ヒータ駆動回路84と、が電気的に接続されている。
【0052】
第1温度検知部18は、図2に示すように本体10の側面に設けられて外気温度を検知可能な温度センサである。第2温度検知部19は、図1に示すように、温度センサ19aとソレノイド19bとを備え、温度センサ19aの先端側が焼成室40の正面側壁から焼成室40内に突出するように設けられている。温度センサ19aの先端は、ソレノイド19bによって、パン容器50に接触する位置と非接触の位置とに切り換えることが可能となっている。なお、図1では、温度センサ19aの先端が、パン容器50に非接触の位置にある場合を示している。第2温度検知部19は、温度センサ19aの先端位置の切り換えによって、焼成室40内の温度(これは、本発明のパン容器周辺の温度の一例である)とパン容器50の温度とを切り換えて検知可能となっている。
【0053】
混練モータ駆動回路82は、制御装置81からの指令の下で混練モータ60の駆動を制御する回路である。また、粉砕モータ駆動回路83は、制御装置81からの指令の下で粉砕モータ64の駆動を制御する回路である。ヒータ駆動回路84は、制御装置81からの指令の下でシーズヒータ41の動作を制御する回路である。
【0054】
制御装置81は、操作部20からの入力信号に基づいてROM等に格納されたパンの製造コース(製パンコース)に係るプログラムを読み出し、混練モータ駆動回路82を介して混練モータ60による混練ブレード72の回転制御、粉砕モータ駆動回路83を介して粉砕モータ64による粉砕ブレード54の回転制御、ヒータ駆動回路84を介してシーズヒータ41による加熱動作を制御を行いながら、自動製パン器1にパンの製造工程を実行させる。また、制御装置81には、時間計測機能が備えられており、パンの製造工程における時間的な制御が可能となっている。
【0055】
なお、制御装置81は本発明の制御手段の実施形態である。また、混練ブレード72、混練モータ60及び混練モータ駆動回路82は本発明の混練手段の実施形態である。また、粉砕ブレード54、粉砕モータ64及び粉砕モータ駆動回路83は本発明の粉砕手段の実施形態である。また、シーズヒータ41及びヒータ駆動回路84は本発明の加熱手段の実施形態である。また、第1温度検知部18及び第2温度検知部19は本発明の温度検知手段の実施形態である。また、膨らみ検知部42は本発明の膨らみ検知手段の実施形態である。
(自動製パン器の動作)
以上のように構成される本実施形態の自動製パン器1は、小麦粉や米粉からパンを製造する(焼き上げる)製パンコースに加えて、米粒(穀物粒の一形態)からパンを製造する(焼き上げる)製パンコース(米粒用製パンコース)を実行できるようになっている。ただし、本実施形態の自動製パン器1は、米粒用製パンコースが実行される場合の制御動作に特徴を有する。このため、以下では、米粒用製パンコースが実行される場合に絞って、自動製パン器1の動作を説明する。
【0056】
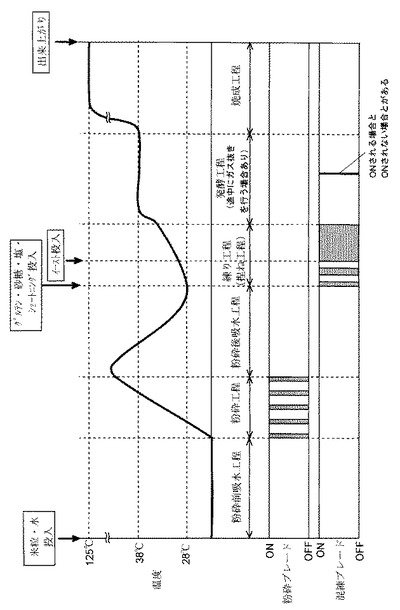
図9は、本実施形態の自動製パン器における米粒用製パンコースの流れを示す模式図である。なお、図9において、温度はパン容器50の温度を示している。図9に示すように、米粒用製パンコースにおいては、粉砕前吸水工程(粉砕前吸液工程の一形態)と、粉砕工程と、粉砕後吸水工程(粉砕後吸液工程の一形態)と、練り(捏ね)工程と、発酵工程と、焼成工程と、がこの順番で順次に実行される。なお、発酵工程においては、詳細は後述するが、その途中でガス抜きが行われる場合と行われない場合とがある。
【0057】
米粒用製パンコースでパンを製造するにあたって、ユーザは、パン容器50に、粉砕ブレード54と混練ブレード72付きのカバー70とを取り付ける。そして、ユーザは、米粒と水をそれぞれ所定量ずつ計量(一例として米粒220g、水210g)してパン容器50に入れる。なお、ここでは、米粒と水とを混ぜることにしているが、単なる水の代わりに、例えば、だし汁のような味成分を有する液体、果汁、アルコールを含有する液体等を混ぜるようにしてもよい。ユーザは、米粒と水とを投入したパン容器50を焼成室40に入れて蓋30を閉じ、操作部20によって米粒用製パンコースを選択し、スタートキーを押す。これにより、米粒からパンを製造する米粒用製パンコースが開始される。
【0058】
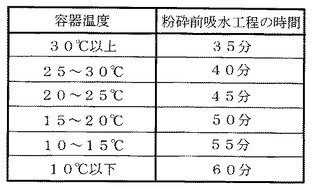
粉砕前吸水工程は、米粒に水(液体の一形態)を含ませることによって、その後に行われる粉砕工程において、米粒を芯まで粉砕しやすくすることを狙う工程である。制御装置81は、粉砕前吸水工程の開始に際して(例えば、スタートキーを押して即のタイミングでもよいし、しばらく経過してからでもよい)ソレノイド19bを駆動させて温度センサ19aの先端をパン容器50に接触させる。これにより、制御装置81は、温度センサ19aを介してパン容器50の温度を検知する。
【0059】
そして、制御装置81は、検知したパン容器50の温度と、容器温度に対応付けて予め定めた粉砕前吸水工程の時間を示すテーブル(図10参照)と、から粉砕前吸水工程の時間を決定する。このテーブルは、例えば制御装置81のROMに記憶されている。米粒の吸水速度は水の温度によって変動し、水温が高いと吸水速度が高まり、水温が低いと吸水速度が低下する。このために、本実施形態のように、パン容器50の温度(水温を反映した温度を示す)が高い場合には粉砕前吸水工程の時間を短くし、パン容器50の温度が低い場合には粉砕前吸水工程の時間を長くすることよって、米粒の吸水度合いのばらつきを抑制できる。
【0060】
なお、図10のテーブルは、出来の良いパンが得られるように予め実験によって求めたものであるが、単なる一例であり、適宜変更可能である。例えば、図10では5℃毎に粉砕前吸水工程の時間を変更する構成としているが、この温度間隔は大きくしても、小さくしてもよい。また、温度の上限や下限も適宜定めてよい。
【0061】
また、本実施形態では、パン容器50の温度に基づいて粉砕前吸水工程の時間を決定する構成にしているが、これに限らず、パン容器50に入ったパン原料温度を測定できるように構成して、この温度に基づいて粉砕前吸水工程の時間を決定する構成としてもよい。なお、季節によって使用する水が冷たくなったり、温かくなったりする傾向があるために、例えば外気温度や焼成室40の温度(パン容器50周辺の温度)に基づいて粉砕前吸水工程の時間を決定する構成としてもよいが、この場合にはパン容器50内の水温が適切に反映されずに、米粒の吸水度合いにばらつきが生じる可能性がある。このため、パン容器50の温度やパン容器50内のパン原料の温度に基づいて粉砕前吸水工程の時間を決定するのが好ましい。
【0062】
また、粉砕前吸水工程においては、その初期段階で粉砕ブレード54を回転させ、その後も断続的に粉砕ブレード54を回転させるようにしてもよい。このようにすると、米粒の表面に傷をつけることができ、米粒の吸液効率を高められる。
【0063】
上記のように決定された粉砕前吸水工程の時間が経過する(粉砕前吸水工程が終了する)と、制御装置81の指令によって、米粒を粉砕する粉砕工程が実行される。この粉砕工程では、米粒と水との混合物の中で粉砕ブレード54が高速回転される。具体的には、制御装置81は、粉砕モータ64を制御してブレード回転軸52を逆方向回転させ、米粒と水との混合物の中で粉砕ブレード54の回転を開始させる。なお、この際、カバー70もブレード回転軸52の回転に追随して回転を開始するが、次のような動作によってカバー70の回転はすぐに阻止される。
【0064】
粉砕ブレード54を回転させるためのブレード回転軸52の回転に伴うカバー70の回転方向は、図5において時計方向であり、混練ブレード72は、それまで折り畳み姿勢(図5に示す姿勢)であった場合には、米粒と水の混合物から受ける抵抗で開き姿勢(図6に示す姿勢)に転じる。混練ブレード72が開き姿勢になると、図7に示すように、クラッチ76は、第2係合体76bが第1係合体76aの回転軌道から逸脱するために、ブレード回転軸52とカバー70の連結を切り離す。同時に、開き姿勢になった混練ブレード72は図6に示すようにパン容器50の内側壁に当るために、カバー70の回転は阻止される。
【0065】
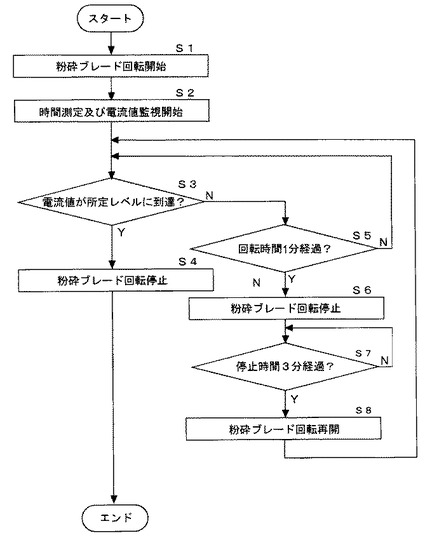
粉砕工程における米粒の粉砕は、先に行われる粉砕前吸水工程によって米粒に水が浸み込んだ状態で実行されるために、米粒を芯まで容易に粉砕することができる。図11は、本実施形態の自動製パン器において実行される粉砕工程の詳細フローを示すフローチャートである。この図11を参照しながら、以下粉砕工程の詳細フローについて説明する。
【0066】
粉砕工程の開始にあたって、上述のように、制御装置81は粉砕モータ64を制御して粉砕ブレード54の回転を開始させる(ステップS1)。この粉砕ブレード54の回転開始とほぼ同時に、時間測定及び粉砕モータ64に供給される制御電流の値の監視を開始する(ステップS2)。なお、粉砕モータ64に供給される制御電流の値は、粉砕モータ64の負荷と相関関係があるパラメータの一例である。そして、粉砕モータ64の負荷を監視するのは、パン容器50に投入された米粒の粉砕状態を検知することを狙ったものである。
【0067】
粉砕モータ64の制御電流値の監視が開始されると、制御装置81は、まず、電流値が所定レベルに到達したか否かを確認する(ステップS3)。ここで、所定レベルは、出来のよいパンを焼き上げるための好ましい条件として、予め実験によって決めた値(電流値)であり、例えば制御装置81のROMに記憶されている。電流値が所定レベルに到達している場合(ステップS3でYes)には、制御装置81は粉砕ブレード54の回転を停止(ステップS4)して、粉砕工程を終了させる。
【0068】
一方、電流値が所定レベルに到達していない場合(ステップS3でNo)には、制御装置81は、粉砕ブレード54の回転時間が1分を経過したか否かを確認する(ステップS5)。回転時間が1分を経過していない場合(ステップS5でNo)には、ステップS3に戻って、上述の動作を繰り返す。一方、回転時間が1分を経過している場合(ステップS5でYes)には、制御装置81は粉砕ブレード54の回転を停止させる(ステップS6)。制御装置81は、粉砕ブレード54の回転停止期間が3分を経過するまで待って(ステップS7)、その後、粉砕ブレード54の回転を再開させる(ステップS8)。その後は、ステップS3に戻って、上述の動作を繰り返す。
【0069】
このように粉砕工程を進める場合、自動製パン器1が置かれる環境の変動や使用する米粒の硬さのばらつき等があっても、粉砕工程後の水と粉砕粉の混合物の状態(粉砕粉の状態)をほぼ一定とすることが可能である。このために、パンの出来栄えのばらつきを抑制することが可能である。
【0070】
なお、本実施形態の自動製パン器1においては、粉砕ブレード54の回転が開始されてすぐに粉砕モータ64の制御電流値が所定レベルに到達したか否かを確認する構成となっているが、この構成に限定される趣旨ではない。すなわち、例えば粉砕ブレード54の回転を開始した初期段階は電流値が不安定となりやすい。このため、制御電流値が所定レベルに到達したか否かの確認は所定期間経過後から開始するようにしてもよい。
【0071】
また、場合によっては、制御電流値がいつまでも所定レベルに到達しないような場合も起こり得る。このような場合の対策として、例えば、粉砕開始から所定時間経過している場合には、制御電流値が所定レベルに到達していない場合でも粉砕工程を終了するようにしてもよい。また、他の対策として、例えばエラー表示等で異常をユーザに知らせて、粉砕工程を中断するようにしてもよい。
【0072】
また、本実施形態では、粉砕ブレード54の回転は、回転(1分間)と停止(3分)とを繰り返す間欠回転とされ、粉砕モータ64の制御電流値が所定レベルに到達すると、回転動作を停止して粉砕工程を終了するようになっている。しかし、この構成に限定される趣旨ではない。例えば、粉砕ブレード54の回転期間や停止期間は適宜変更してもよい。また、粉砕ブレード54の回転は間欠回転ではなく、連続回転としてもよい。ただし、間欠回転とすることにより、米粒を対流させて満遍なく米粒を粉砕できるために、間欠回転とするのが好ましい。
【0073】
また、本実施形態では、粉砕モータ64の負荷を利用して米粒の粉砕状態を検知することにしている。そして、粉砕モータ64の負荷と相関関係のあるパラメータとして、粉砕モータ64に供給される制御電流値を用いている。しかし、この構成に限定される趣旨ではなく、粉砕モータ64の負荷と相関関係のあるパラメータとして、例えば粉砕モータ64のトルク、粉砕モータ64駆動時の電力値、粉砕モータ64の温度変化等を利用するようにしても構わない。要は、粉砕モータ64の負荷と相関関係のあるパラメータであって、そのパラメータを監視することによって粉砕状態を検知できるものを選択すればよい。
【0074】
また、粉砕工程時においては、パン容器50の振動が大きいために、第2温度検知部19の温度センサ19aはパン容器50に接触しない位置とするのが好ましい。これにより、温度センサ19a及びパン容器50の損傷を防止できる。
【0075】
図9に示すように、粉砕工程においては、粉砕時の摩擦熱によりパン容器50の温度(パン容器50内の粉砕粉の温度)が上昇する。そして、パン容器50の温度は例えば40〜45℃程度となる。このような状態で、イーストを投入してパン生地作りを行うと、イーストが働かず出来の良いパンを製造することができない。このような点等を考慮して、自動製パン器1では、粉砕工程の後に、米粒の粉砕粉を水に浸漬した状態で放置する粉砕後吸水工程を設けている。
【0076】
この粉砕後吸水工程は、米粒の粉砕粉の温度を低下させる冷却期間であると同時に、粉砕粉に更に水を吸水させて、微粒子の量を増やす役割も担う工程である。このように、微粒子を増やすことにより、きめの細かいパンを焼き上げることが可能になる。粉砕後吸水工程は、予め決められた所定の時間だけ行う構成としてもよいが、このような構成の場合、例えば環境温度によって、次に行う練り工程の開始時におけるパン容器50(パン原料)の温度にばらつきが生じて、出来の良いパンが得られない場合がある。
【0077】
このため、1つの対策として、第1温度検知部18(外気温度を検知するもの)、或いは、第2温度検知部19(温度センサ19aの先端をパン容器50に接触させない状態とする。すなわち、パン容器50周辺の温度(焼成室40内の温度)を検知するモードで使用)によって、例えば粉砕工程の終了時(場合によっては粉砕工程の開始前でもよい)に環境温度を検知し、この環境温度に基づいて粉砕後吸水工程の時間を決定するようにしてもよい。これにより、粉砕後吸水工程が終了した段階におけるパン容器50の温度のばらつきを抑制できる。
【0078】
具体的には、例えば予め実験により、環境温度と、粉砕工程後のパン容器50の温度が最適な温度(例えば28℃〜30℃程度)となる時間との関係を調べてテーブルを作成し、このテーブルを制御装置81のROMに記憶させておく。例えば、図10のテーブルと同様に、一定範囲の環境温度について、5℃間隔で最適な吸水時間を調べて記憶させておく。そして、前述のように環境温度を検知し、検知された温度と予め制御装置81のROMに記憶させておいたテーブルとから吸水時間を決定して粉砕後吸水工程を実行する。なお、粉砕後吸水工程の場合は、環境温度が高い場合に工程時間を長くし、環境温度が低い場合に工程時間を短くする必要がある。
【0079】
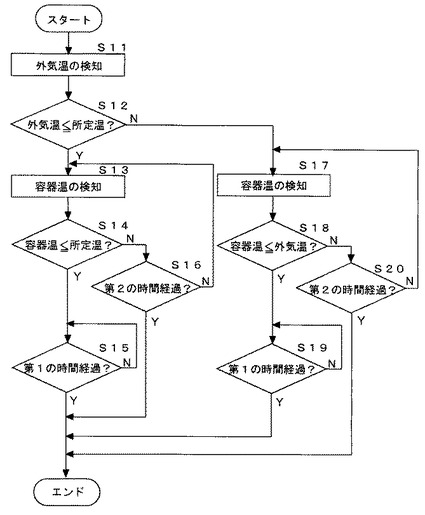
本実施形態の自動製パン器1においては、粉砕後吸水工程は上記の手法ではなく、図12に示すような別の手法で、粉砕後吸水工程の工程時間を適宜変動させて粉砕後吸水工程を実行するようになっている。以下、これについて説明する。
【0080】
粉砕工程が終了すると、制御装置81は第1温度検知部18によって外気温度を検知する(ステップS11)。検知された外気温度が予め設定された所定の温度以下であるか否かを確認する(ステップS12)。所定の温度は、練り工程を開始するに際して好ましい温度であり、例えば28℃以上30℃以下の温度に設定される。
【0081】
外気温度が所定の温度以下である場合(ステップS12でYes)には、制御装置81は第2温度検知部19によってパン容器50の温度を検知する(ステップS13)。なお、ここでは、第2温度検知部19の温度センサ19aの先端がパン容器50に接触した状態で温度検知を行う。そして、制御装置81は、検知されたパン容器50の温度が所定の温度以下であるか否かを確認する(ステップS14)。
【0082】
検知されたパン容器50の温度が所定の温度以下である場合(ステップS14でYes)には、制御装置81は、粉砕後吸水工程が開始されてから予め設定された第1の時間(例えば30分)が経過しているか否かを確認する(ステップS15)。この第1の時間は、粉砕後吸水工程の時間が短くなりすぎないように設けられている。すなわち、上述のように粉砕後吸水工程は、粉砕工程で得られた粉砕粉に更に水を吸水させることにより、粉砕粉の微粒子の量を増加させる役割も担う。このため、粉砕後吸水工程があまりに短くなると好ましくないために、第1の時間は設定されている。ただし、第1の時間をあまり長く設定すると、粉砕粉の冷却が進みすぎて、練り工程開始時の温度ばらつきの要因ともなるために、このような事態が発生しないように第1の時間を設定するのが好ましい。なお、第1の時間を経過しているか否かを確認するステップS15は、設けない構成としても構わない。
【0083】
粉砕後吸水工程が開始されてから第1の時間が経過している場合(ステップS15でYes)には、制御装置81は粉砕後吸水工程を終了する。一方、粉砕後吸水工程が開始されてから第1の時間が経過していない場合(ステップS15でNo)には、制御装置81は第1の時間が経過するまで待って、粉砕後吸水工程を終了する。
【0084】
検知されたパン容器50の温度が所定の温度より高い場合(ステップS14でNo)には、制御装置81は、粉砕後吸水工程が開始されてから予め設定された第2の時間(第1の時間よりも長い時間であり、例えば60分)が経過しているか否かを確認する(ステップS16)。そして、第2の時間を経過している場合(ステップS16でYes)には、パン容器50の温度が所定の温度に到達していなくても粉砕後吸水工程を終了する。一方、第2の時間を経過していない場合(ステップS16でNo)には、ステップS13に戻り、ステップS13以降の動作を行う。
【0085】
粉砕後吸水工程の開始から第2の時間を経過したか否かを確認するステップS16は、次のような理由により設けられる。すなわち、パン容器50の温度が、所定の温度まで下がるのに、非常に長い時間を要する場合も想定される。このような場合に、いつまでも練り工程を開始しないとパンの製造時間が著しく長くなって、ユーザが不便に感じる可能性もある。このため、粉砕後吸水工程の時間があまりにも長くなり過ぎないように、吸水時間の上限を設定するものである。ただし、このステップS16は設けない構成としてもよい。この場合には、パン容器50の温度が所定の温度になるまで待って、粉砕後吸水工程を終了することになる。
【0086】
ところで、外気温度が所定の温度より高い場合には、粉砕後吸水工程において、パン容器50の温度を所定の温度まで下げるのは無理である。このために、この場合には、原則として外気温度まで下がった時点で粉砕後吸水工程を終了することにしている。詳細には、次のように処理される。
【0087】
すなわち、ステップS12において、外気温度が所定の温度より高い場合(ステップS12でNo)、制御装置81は第2温度検知部19によってパン容器50の温度を検知する(ステップS17)。そして、制御装置81は、検知されたパン容器50の温度が外気温度以下であるか否かを確認する(ステップS18)。
【0088】
検知されたパン容器50の温度が外気温度以下である場合(ステップS18でYes)には、制御装置81は、粉砕後吸水工程が開始されてから第1の時間が経過しているか否かを確認する(ステップS19)。この第1の時間は、ステップS5の場合と同様の趣旨で定められるものである。そして、ステップ5と同様にステップS19を設けない構成としてもよい。
【0089】
粉砕後吸水工程が開始されてから第1の時間が経過している場合(ステップS19でYes)には、制御装置81は粉砕後吸水工程を終了する。一方、粉砕後吸水工程が開始されてから第1の時間が経過していない場合(ステップS19でNo)には、制御装置81は第1の時間が経過するまで待って、粉砕後吸水工程を終了する。
【0090】
検知されたパン容器50の温度が外気温度より高い場合(ステップS18でNo)には、制御装置81は、粉砕後吸水工程が開始されてから予め設定された第2の時間が経過しているか否かを確認する(ステップS20)。そして、第2の時間を経過している場合(ステップS20でYes)には、パン容器50の温度が外気温度に到達していなくても粉砕後吸水工程を終了する。一方、第2の時間を経過していない場合(ステップS20でNo)には、ステップS17に戻り、ステップS17以降の動作を行う。
【0091】
なお、ステップS20を設ける趣旨は、ステップS16を設ける趣旨と同様である。ステップS20はステップS16と同様に設けない構成としても構わない。この場合には、パン容器50の温度が外気温度になるまで待って、粉砕後吸水工程を終了することになる。
【0092】
また、本実施形態では、パン容器50の温度に基づいて粉砕後吸水工程の時間を変動させる構成としているが、パン容器50内のパン原料温度に基づいて粉砕後吸水工程の時間を変動させる構成としてもよい。
【0093】
また、本実施形態では、粉砕後吸水工程に要する時間(粉砕後吸水工程の終了時期)を、粉砕後吸水工程中にパン容器50の温度を適宜検知しながら決定する構成とした。これに代えて、粉砕後吸水工程の開始時に、例えば外気温度及びパン容器50の温度を検知し、外気温度によって予想されるパン容器50の温度低下率(予め実験によって求めておく必要がある)とパン容器50の温度から、粉砕後吸水工程に要する時間を決定する構成等としても構わない。
【0094】
粉砕後吸水工程が終了すると、続いて練り工程が行われる。練り工程の開始時には、グルテンや、食塩、砂糖、ショートニングといった調味料がそれぞれ所定量(一例として、グルテン50g、砂糖16g、塩4g、ショートニング10g)パン容器50に投入される。この投入は、例えばユーザの手によって投入するようにしてもよいし、自動投入装置を設けてユーザの手を煩わせることなくそれらを投入するようにしてもよい。
【0095】
なお、グルテンは、パン原料として必須のものではない。このため、好みに応じてパン原料に加えるか否かを判断してよい。また、グルテンの代わりに増粘安定剤(例えばグアガム)や小麦粉等を投入するようにしても構わない。
【0096】
練り工程の開始にあっては、制御装置81は混練モータ60を制御してブレード回転軸52を正方向回転させる。このブレード回転軸52の正方向回転に追随してカバー70が正方向(図6においては反時計方向)に回転すると、パン容器50内のパン原料からの抵抗を受けて混練ブレード72が開き姿勢(図6参照)から折り畳み姿勢(図5参照)に転じる。これを受けてクラッチ76は、図4に示すように、第2係合体76bが第1係合体76aの回転軌道に干渉する角度となり、ブレード回転軸52とカバー70を連結する。これにより、カバー70と混練ブレード72は、ブレード回転軸52と一体となって正方向に回転する。なお、混練ブレード72の回転は低速・高トルクとされる。
【0097】
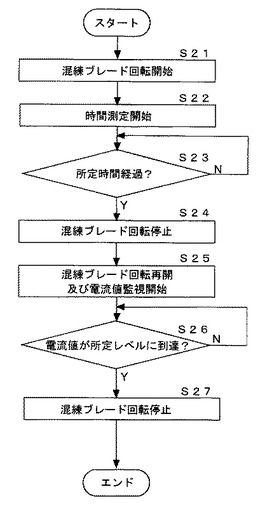
混練ブレード72の回転によってパン原料は混練され、所定の弾力を有する一つにつながった生地(dough)に練り上げられていく。混練ブレード72が生地を振り回してパン容器50の内壁にたたきつけることにより、混練に「捏ね」の要素が加わることになる。図13は、本実施形態の自動製パン器において実行される練り工程の詳細フローを示すフローチャートである。この図13を参照しながら、以下練り工程の詳細フローについて説明する。
【0098】
粉砕後吸水工程が終了して、パン容器50にグルテンや調味料が投入されると、制御装置81は、混練モータ60を制御して混練ブレード72の回転を開始させる(ステップS21)。また、この混練ブレード72の回転開始とほぼ同時に、制御装置81は時間測定を開始する(ステップS22)。時間測定を開始してから所定時間が経過するまで、パン容器50内のパン原料を混練ブレード60によって混練する(ステップS23)。なお、正確には、本実施形態においては、この間の混練ブレード72の回転は間欠回転である。ただし、この間の混練ブレード72の回転は連続回転としてもよい。
【0099】
所定時間が経過すると、制御装置81は混練ブレード72の回転を停止させる(ステップS24)。そして、この混練ブレード72が停止されている間に、イースト(例えばドライイースト)の投入が行われる。このイーストは、ユーザの手によって投入するようにしてもよいし、自動投入装置を設けて自動投入するようにしてもよい。なお、イーストをグルテン等と一緒に投入しないのは、イースト(ドライイースト)と水とが直接接触するのをなるべく避けると共に、イーストの飛散を防止するためである。ただし、場合によっては、イーストをグルテン等と同時に投入してもよい。また、本実施形態では、混練ブレード72を停止した状態でイーストを投入するようにしているが、混練ブレード72を回転しながらイーストを投入するようにしてもよい。
【0100】
混練ブレード72が停止されている期間にイーストが投入されると、制御装置81は、混練ブレード72の回転を再開させると共に、混練モータ60に供給される制御電流の値の監視を開始する(ステップS25)。本実施形態では、イースト投入後の混練ブレード72の回転は連続回転としている。混練ブレード72が回転すると、制御装置81は電流値が所定レベルに到達したか否かを確認する(ステップS26)。この確認は電流値が所定レベルに到達するまで行われる。そして、電流値が所定のレベルに到達した段階で混練ブレード72を停止して練り工程を終了する。
【0101】
なお、所定レベルは、出来のよいパンを焼き上げるための好ましい条件として、予め実験によって決めた値(電流値)であり、例えば制御装置81のROMに記憶されている。また、混練モータ60に供給される制御電流の値は、混練モータ60の負荷と相関関係があるパラメータの一例であり、その他、例えば混練モータ60のトルク、混練モータ60駆動時の電力値、混練モータ60の温度変化等を前記パラメータとして利用しても構わない。なお、混練モータ60の負荷を監視するのは、パン容器50のパン生地の状態を検知することを狙ったものである。
【0102】
なお、本実施形態の自動製パン器1においては、混練ブレード72の回転が再開されてすぐに混練モータ60の制御電流値が所定レベルに到達したか否かを確認する構成となっているが、この構成に限定される趣旨ではない。すなわち、例えば混練ブレード72の回転を再開した初期段階は電流値が不安定となりやすい。このため、制御電流値が所定レベルに到達したか否かの確認は所定期間経過後から開始するようにしてもよい。
【0103】
また、場合によっては、制御電流値がいつまでも所定レベルに到達しないような場合も起こり得る。このような場合の対策として、例えば、混練ブレード72の回転再開から所定時間経過している場合には、制御電流値が所定レベルに到達していない場合でも練り工程を終了するようにしてもよい。また、他の対策として、例えばエラー表示等で異常をユーザに知らせて、練り工程を中断するようにしてもよい。
【0104】
また、自動製パン器1においては、この練り工程において、制御装置81はシーズヒータ41を制御して焼成室40の温度が所定の温度(例えば32℃等)となるように調整している。この場合、第2温度検知部19の温度センサ19aの先端はパン容器50に接触しない位置にある。このため、パン容器50の振動が大きい練り工程において、温度センサ19a及びパン容器50の損傷は発生し難い。また、具材(例えばレーズン等)入りのパンを焼く場合には、この練り工程の途中で投入するようにすればよい。
【0105】
練り工程が終了すると、制御装置81の指令によって、パン生地を発酵に適した温度(発酵温度)で発酵させる発酵工程が行われる。図14は、本実施形態の自動製パン器において実行される発酵工程の詳細フローを示すフローチャートである。以下、図14を参照しながら発酵工程の詳細なフローについて説明する。
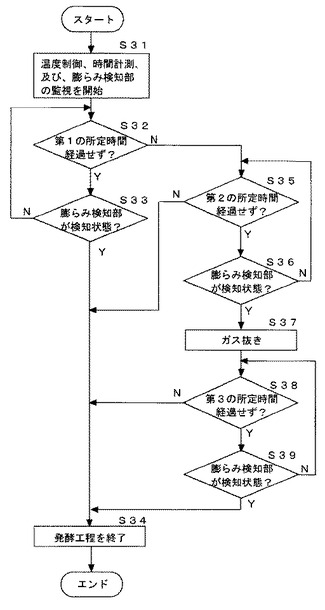
【0106】
練り工程が終了すると、制御装置81は、まず、シーズヒータ41を制御して、焼成室40の温度が予め定めた発酵温度(例えば38℃等)となるように温度制御を開始すると共に、時間計測を開始する。また、これらとほぼ同時に膨らみ検知部42の監視を開始する(ステップS31)。なお、発酵工程における焼成室40の温度検知は、第2温度検知部19のソレノイド19bの駆動を停止して温度センサ19aがパン容器50から離れた状態で行われる。
【0107】
次に、制御装置81は、第1の所定時間が経過していないことを確認する(ステップS32)。この第1の所定時間は、このままの状態でパン生地の発酵を続けるとパン生地に大きな空洞ができてしまって上質のパンを得られない可能性が高くなる時間、として実験によって求められる時間である。本実施形態の自動製パン器1では60分としているが、この時間は適宜変更してよい。
【0108】
第1の所定時間が経過していない場合(ステップS32でYes)には、制御装置81は膨らみ検知部42が検知状態である(パン生地が所定の高さ(例えばパン容器50の上面から5mmの高さ)まで膨らんでいる状態である)か否かを確認する(ステップS33)。膨らみ検知部42が検知状態である場合(ステップS33でYes)には、制御装置81はパン生地が丁度良い具合に発酵し、これ以上発酵を続けるとパン生地が膨らみ過ぎて都合が悪い(例えば、大きな空洞が発生したり、パン生地が蓋30に付着してしまったりする等)と判断し、発酵工程を終了させる(ステップS34)。一方、膨らみ検知部42が検知状態でない(パン生地が所定の高さまで膨らんでいない状態である)場合(ステップS33でNo)には、制御装置81はステップ32に戻って繰り返し処理を行う。
【0109】
第1の所定時間が経過している場合(ステップS32でNo)には、制御装置81は、第2の所定時間が経過していないことを確認する(ステップS35)。この第2の所定時間は、パン生地が丁度良い具合に発酵する(膨らみ検知部42によって検知される状態までパン生地が膨らんだ状態となる)までに要する時間(発酵工程開始からの時間)として、どんなに長くかかる場合でも通常はこの時間を超えないであろうという基準で決められる時間であり、実験的に求められるものである。本実施形態の自動製パン器1では80分としているが、この時間は適宜変更してよい。
【0110】
第2の所定時間が経過していない場合(ステップS35でYes)には、制御装置81は膨らみ検知部42が検知状態である(パン生地が所定の高さまで膨らんでいる状態である)か否かを確認する(ステップS36)。膨らみ検知部42が検知状態である場合(ステップS36でYes)には、制御装置81は、混練モータ60を制御して混練ブレード72を非常にゆっくりとした速度(例えば10.8rpm)で短時間(例えば10秒)回転させて、パン生地に溜まったガスを抜くガス抜きを行う(ステップS37)。これにより、パン生地は萎んで所定の高さ(例えばパン容器50の上面から5mmの高さ)より低くなる。一方、膨らみ検知部42が検知状態でない場合(ステップS36でNo)には、制御装置81はステップ35に戻って繰り返し処理を行う。
【0111】
第1の所定時間を経過した後であって第2の所定時間を経過するまでの間に、膨らみ検知部42で検知されたパン生地には、ガスが溜まって大きな空洞が形成されている可能性が高い。このような状態でパンを焼くと内部に大きな空洞を有するパンが焼き上がることになって好ましくない。このために、パン内部に大きな空洞が形成されないように、発酵工程の途中でガス抜きを行うことにしている。なお、ガス抜きを行う際に、混練ブレード72を高速で回すとパン生地が潰れてしまって、ふっくらしたパンを焼き上げ難くなる。このため、本実施形態のように、ガス抜きにおける混練ブレード72の回転は低速で行うのが好ましく、また、その時間も短時間が好ましい。
【0112】
ガス抜きを行った後は、ガス抜きが終了した時点から第3の所定時間が経過していないことを確認する(ステップS38)。この第3の所定時間は、ガス抜きを行った後のパン生地が丁度良い具合に膨らむ(膨らみ検知部42によって検知される状態までパン生地が膨らむ)までに要する時間(ガス抜き後からの時間)として、どんなに長くかかる場合でも通常はこの時間を超えないであろうという基準で決められる時間であり、実験的に求められるものである。本実施形態の自動製パン器1では50分としているが、この時間は適宜変更してよい。
【0113】
第3の所定時間が経過していない場合(ステップS38でYes)には、制御装置81は膨らみ検知部42が検知状態である(パン生地が所定の高さまで膨らんでいる状態である)か否かを確認する(ステップS39)。膨らみ検知部42が検知状態である場合(ステップS39でYes)には、制御装置81はパン生地が丁度良い具合に発酵し、これ以上発酵を続けるとパン生地が膨らみ過ぎて都合が悪い(例えば、大きな空洞が発生したり、パン生地が蓋30に付着してしまったりする等)と判断し、発酵工程を終了させる(ステップS34)。一方、膨らみ検知部42が検知状態でない場合(ステップS39でNo)には、制御装置81はステップ38に戻って繰り返し処理を行う。
【0114】
ところで、ステップS35で第2の所定時間が経過していると判断される場合(ステップS35でNo)、及び、ステップS38で第3の所定時間が経過していると判断される場合(ステップS38でNo)には、パン生地の膨らみが不十分であるが、制御装置81は発酵工程を終了させる(ステップ34)。
【0115】
上述のように、第2の所定時間及び第3の所定時間は、通常は、この時間が経過するまでにパン生地が膨らみ検知部42で検知されるように設定されている。このため、この状態(ステップS35でNo、及び、ステップS38でNo)で更にパン生地が膨らむのを待っても、なかなかパン生地が所望の状態に膨らまない可能性が高い。そこで、パンの製造工程が徒に長くなってしまうことを避けるために、上述のように発酵工程を終了させることにしている。第2の所定時間及び第3の所定時間は、このような意図で設けられるものであるが、場合によっては、ステップS35やステップS38は設けないようにしてもよい。ただし、本実施形態のように構成するのが好ましい。
【0116】
なお、このような状態(ステップS35でNo、及び、ステップS38でNo)は、通常は起こらないはずであり、このような状態が発生した場合には上質のパンを焼き上げることができない可能性が高い。このため、発酵工程に続いて行われる焼成工程を開始する前に、ユーザに報知音やエラー表示等で、このような事態を知らせるようにしてもよいし、場合によっては、パンの製造を中断するようにしてもよい。
【0117】
以上のように発酵工程を行うと、例えば自動製パン器1が置かれた環境や原料の変動(特にイースト量の変動)等によらず、発酵状態のばらつきを抑制して発酵工程を終了させることが可能である。このため、発酵工程における不具合が原因となって不出来なパンが製造される可能性を低減できる。また、発酵工程において、パン生地が自動製パン器1の蓋30の裏側に付着するのを防止できる。
【0118】
なお、本実施形態の自動製パン器1では、第1から第3の所定時間を固定値として制御装置81のROM等に記憶させて使用する構成としているが、この構成に限定されない。すなわち、例えば第1から第3の所定時間について、環境温度に対応して複数用意しておき(ROM等にテーブルを記憶させておく)、自動製パン器1が置かれる環境温度に対応して適宜変動させるようにしてもよい。
【0119】
発酵工程が終了すると、制御装置81の指令によって続いて焼成工程が実行される。制御装置81は、シーズヒータ41を制御して、焼成室40の温度を、パン焼きを行うのに適した温度(例えば125℃)まで上昇させ、焼成環境下で所定の時間(本実施形態では50分)パンを焼く。焼成工程の終了については、例えば操作部20の図示しない液晶表示パネルにおける表示や報知音等によってユーザに知らされる。ユーザは、製パン完了を検知すると、蓋30を開けてパン容器50を取り出す。
【0120】
なお、この焼成工程でも、自動製パン器1が置かれる環境温度(外気温度)によって、パンを焼き上げるのに適した温度にまで到達する時間に差が出る場合がある。このために、この焼成工程でも外気温度に基づいて焼成工程の時間が変動される構成としてもよい。
【0121】
以上のように、本実施形態の自動製パン器1によれば、米粒からパンを焼き上げることが可能であるために、非常に便利である。そして、自動製パン器1が置かれる環境温度の変動、パン原料として使用する米粒の硬さのばらつき、パン原料の投入量の誤差等に影響を抑制できるように米粒用製パンコースは工夫されているために、米粒から出来の良い(上質の)パンを安定して製造することが可能である。
(その他)
なお、以上に示した自動製パン器は本発明の一例であり、本発明が適用される自動製パン器の構成は、以上に示した実施形態に限定されるものではない。
【0122】
例えば、以上に示した実施形態では、米粒からパンを製造する構成としたが、米粒に限らず、小麦、大麦、粟、稗、蕎麦、とうもろこし、大豆等の穀物粒を原料としてパンを製造する場合にも、本発明は適用されるものである。
【0123】
また、以上に示した実施形態では、膨らみ検知部42を構成する発光素子42aと受光素子42bとを、焼成室40を構成する4つの周側壁40aのうち、自動製パン器1の左右側に位置する一対の周側壁に設ける構成とした。しかし、この構成に限定される趣旨ではない。すなわち、例えば、自動製パン器1の前後側に位置する一対の周側壁に、発光素子42a及び受光素子42bを設ける構成等としても構わない。また、発光素子42a及び受光素子42bを、焼成室40の周側壁40aに設けるのではなく、例えば、蓋30の裏側やパン容器50に設ける構成等としても構わない。また、本実施形態では、膨らみ検知部42を構成するフォトインタラプタは、いわゆる光透過型の構成であるが、場合によっては光反射型の構成としてもよい。
【0124】
また、以上に示した実施形態では、膨らみ検知部42をフォトインタラプタで構成したが、この構成に限定される趣旨ではない。すなわち、例えば、膨らみ検知部を、金属等の細線と、この細線に加わる張力の変化を検知する張力検知手段と、で構成しても構わない。この場合、細線はパン容器50の上面から所定の高さだけ離れるように設けられる。細線の両端は、例えば焼成室40の周側壁40aに固定され、一方端側において張力検知手段によって張力変化を検知できるようにする。このようにすれば、パン生地がパン容器50の上面から所定の高さを超えると細線に加わる張力に変化が生じるので、パン生地がパン容器50の上面から所定の高さを超えて膨らんだことを検知できる。なお、この構成の場合には、パン容器50を焼成室40に収容した後に、細線をセットする必要がある。
【0125】
また、以上に示した実施形態では、粉砕工程及び練り工程において、モータの負荷(詳細には電流値)を監視し、その負荷に基づいて実行中の工程の終了判断を行う構成とした。しかし、いずれか一方についてのみ、モータの負荷に基づいて実行中の工程の終了判断を行う構成としても構わない。
【0126】
例えば、練り工程について、モータの負荷に基づいて実行中の工程の終了判断を行わない場合、次のように練り工程を実行してもよい。すなわち、練り工程を開始するに際し、第1温度検出部18によって外気温度を検知する。そして、検知した外気温度と、外気温度に対応付けて予め定めた練り工程の時間を示すテーブルと、から練り工程の時間を決定する。このテーブルは、例えば制御装置81のROMに記憶する。練り工程によって出来上がるパン生地の出来栄えは、自動製パン器1が置かれる環境温度による影響を受け易いが、このように構成することで、環境温度の変動によるパンの出来栄えの変動を抑制できる。なお、外気温度に基づいて練り工程の時間を決定する代わりに、パン容器50周辺の温度(例えば焼成室40の温度)に基づいて練り工程の時間を決定する構成としてもよい。
【0127】
また、以上に示した実施形態では、粉砕前吸水工程及び粉砕後吸水工程において、温度検知部で検知された温度を利用して工程時間を変動させる構成とした。しかし、この構成に限らず、上記2つの工程のうちの少なくともいずれか一方について、工程時間を所定の時間に固定する構成としても構わない。
【0128】
また、以上に示した米粒用製パンコースで実行される製造工程は例示であり、他の製造工程としてもよい。例を挙げると、以上に示した実施形態では、米粒からパンを製造するにあたって、粉砕工程を行う前後に吸水工程を行う構成としているが、これらの吸水工程を行わない構成等としてもよい。
【0129】
その他、以上に示した実施形態では、自動製パン器1が粉砕ブレード54と混練ブレード72との2つのブレードを備え、その各々に対して別々にモータを設けるる構成とした。しかし、これに限らず、例えば粉砕と混練とを兼用するブレード及びモータを備える構成としてもよい。また、自動製パン器によって実行される製パンコースが、米粒用製パンコースのみである構成でもよい。
【産業上の利用可能性】
【0130】
本発明は、家庭用の自動製パン器に好適である。
【符号の説明】
【0131】
1 自動製パン器
18 第1温度検知部(温度検知手段の一部)
19 第2温度検知部(温度検知手段の一部)
41 シーズヒータ(加熱手段の一部)
42 膨らみ検知部(膨らみ検知手段)
42a 発光素子(膨らみ検知手段の一部)
42b 受光素子(膨らみ検知手段の一部)
50 パン容器
54 粉砕ブレード(粉砕手段の一部)
60 混練モータ(混練手段の一部)
64 粉砕モータ(粉砕手段の一部)
72 混練ブレード(混練手段の一部)
81 制御装置(制御手段)
82 混練モータ駆動回路(混練手段の一部)
83 粉砕モータ駆動回路(粉砕手段の一部)
84 ヒータ駆動回路(加熱手段の一部)
【技術分野】
【0001】
本発明は、主として一般家庭で使用される自動製パン器に関する。
【背景技術】
【0002】
市販の家庭用自動製パン器は、パン原料を入れたパン容器を本体内の焼成室に入れ、パン容器内のパン原料を混練ブレードで混練して練り上げ(練り工程)、発酵工程を経た後に、パン容器をそのままパン焼き型としてパンを焼き上げる(焼成工程)仕組みのものが一般的である(例えば特許文献1参照)。
【0003】
従来においては、このような自動製パン器を用いてパンを製造する場合、小麦や米などの穀物を製粉した粉(小麦粉、米粉等)や、そのような製粉した粉に各種の補助原料を混ぜたミックス粉を入手し、これをパン原料として用いることによってパンを製造していた。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2000−116526号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、一般家庭においては米粒に代表されるように、粉の形態ではなく粒の形態で穀物を所持していることがある。このために、自動製パン器を用いて穀物粒から直接パンを製造することができれば非常に便利である。このようなことから、本出願人らは、鋭意研究の末、穀物粒を出発原料としてパンを製造する方法を発明している。なお、これについては、先に特許出願を行っている(特願2008−201507)。
【0006】
先に出願したパンの製造方法について紹介しておく。このパンの製造方法では、まず、穀物粒と液体との混合物の中で粉砕ブレードを回転させて穀物粒の粉砕を行う(粉砕工程)。そして、粉砕工程を経て得られたペースト状の粉砕粉に例えばグルテンやイースト等を加え、混練ブレードによって生地に練り上げ(練り工程)、生地を発酵(発酵工程)させた後、パンに焼き上げる(焼成工程)。
【0007】
本出願人らは、上記の製造工程を適用した自動製パン器について現在開発中であり、この開発段階の自動製パン器を用いて穀物粒からパンを製造した場合に、パンの出来栄えにばらつきが生じることがあった。このようなばらつきは、例えば、自動製パン器が置かれる環境温度の変動、原料として用いる穀物粒の硬さ等のばらつき、パン原料の投入量の誤差等に原因があると考えられた。穀物粒からパンを製造できる自動製パン器は、家庭でのパン製造をより身近なものとできるといったメリットを有するが、このようにパンの出来栄えが不安定であると、ユーザの家庭でのパン作りに対する意欲を喪失しかねない。
【0008】
そこで、本発明は、穀物粒から安定して出来の良いパンを製造できる自動製パン器を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するために本発明の自動製パン器は、パン原料が投入されるパン容器と、パン原料として前記パン容器に投入された穀物粒を粉砕する粉砕手段と、前記パン容器内のパン原料をパン生地に練り上げる混練手段と、前記パン容器内のパン原料を加熱する加熱手段と、前記パン容器内のパン生地が所定の高さまで膨らんだことを検知する膨らみ検知手段と、前記粉砕手段、前記混練手段、及び前記加熱手段を制御して、穀物粒を用いてパンを焼き上げる穀物粒用製パンコースを実行させる制御手段と、を備え、前記穀物粒用製パンコースには、前記パン容器に投入された穀物粒と液体との混合物を前記粉砕手段によって粉砕する粉砕工程と、前記穀物粒の粉砕粉を含む前記パン容器内のパン原料を前記混練手段によってパン生地に練り上げる練り工程と、練り上げられたパン生地を発酵させる発酵工程と、発酵させたパン生地を焼成する焼成工程と、が含まれ、前記制御手段は、前記膨らみ検知手段から得られる情報に基づいて、前記発酵工程の途中でガス抜きを行うか否かを判断するとともに、前記発酵工程においてパン生地が前記所定の高さを超えて膨らまないように制御を行うことを特徴としている。
【0010】
なお、本明細書においては、パン原料なる語は、パンを焼き上げるもとになる材料に対して広い意味で用いており、パン生地とされた状態に対してもパン原料なる語を用いる場合がある。
【0011】
本構成によれば、膨らみ検知手段からの情報に基づいて、適宜、発酵工程の途中でガス抜きを行うようになっているために、発酵工程を経たパン生地内に大きな空洞ができるのを抑制することができ、出来の良い(上質の)パンを焼き上げられる。また、膨らみ検知手段からの情報に基づいて、パン生地が所定の高さを超えて膨らまないようにしているために、発酵工程におけるパン生地の取り扱いが不十分であることが原因となって不出来なパンが製造される可能性を低減できる。更に、パン生地が所定の高さを超えて膨らまないようになっているために、自動製パン器の蓋にパン生地が付着するという事態を避けられる。
【0012】
上記構成の自動製パン器において、前記制御手段は、前記発酵工程が開始されてから第1の所定時間が経過するまでに、前記膨らみ検知手段が検知状態となった場合には、検知状態となった段階で前記ガス抜きを行うことなく前記発酵工程を終了させ、前記第1の所定時間が経過するまでに前記膨らみ検知手段が検知状態とならない場合には、前記混練手段を用いて前記ガス抜きを実行させる場合があることとしてもよい。
【0013】
本構成によれば、発酵工程の時間が長時間となることなくパン生地が所望の状態に膨らんだ場合(この場合にはパン生地内に大きな空洞ができている可能性が低い)に、ガス抜きを行うことなく発酵工程を終了させるようにできる。そして、発酵工程の時間が長時間となった場合(この場合にはパン生地内に大きな空洞ができている可能性がある)には、適宜、発酵工程の途中にガス抜きを行うようにできる。このために、発酵工程を経たパン生地内に大きな空洞ができるのを適切に抑制して、上質のパンを焼き上げられる。
【0014】
上記構成の自動製パン器において、前記制御手段は、前記発酵工程が開始されてから前記第1の所定時間より長い第2の所定時間が経過するまでに前記膨らみ検知手段が検知状態となった場合には、検知状態となった段階で前記ガス抜きを実行させ、前記第2の所定時間が経過するまでに前記膨らみ検知手段が検知状態とならない場合には、前記ガス抜きを行うことなく前記発酵工程を終了させることとしてもよい。
【0015】
本構成によれば、発酵工程の時間が長時間となってパン生地内に大きな空洞ができている可能性が高い状態を適切に判断してガス抜きを行うようになっている。このために、本構成によれば、上質のパンを安定して得ることが可能である。
【0016】
上記構成の自動製パン器において、前記制御手段は、前記ガス抜きが実行された場合に、前記ガス抜きが終了してから第3の所定時間が経過するまでに前記膨らみ検知手段が検知状態となった場合には、検知状態となった段階で前記発酵工程を終了させ、前記第3の所定時間が経過するまでに前記膨らみ検知手段が検知状態とならない場合には、前記第3の所定時間が経過した段階で前記発酵工程を終了させることとしてよい。
【0017】
本構成によれば、発酵工程でガス抜きを行った場合に、ガス抜き後にパン生地が適切に膨らんだ段階で発酵工程を終了させることができる。また、ガス抜き後におけるパン生地の膨らみが悪い場合に、所定時間(第3の所定時間)が経過した段階で発酵工程を終了させるようになっているために、パンの製造工程が長くなりすぎるのを防止できる。
【0018】
上記構成の自動製パン器において、前記膨らみ検知手段は、発光素子からの光を受光素子により受光可能に設けられ、受光状態の変化に基づいてパン生地が前記所定の高さまで膨らんだことを検知するフォトインタラプタであることとしてもよい。
【0019】
本構成によれば、膨らみを検知する手段を得るために大きなスペースが取られないようにできる。また、特にユーザの手を煩わせることなく膨らみを検知できる状態が得られるために、ユーザにとっても使い勝手がよい。
【0020】
上記構成の自動製パン器において、前記粉砕手段は、粉砕ブレードと前記粉砕ブレードを回転させる粉砕モータとを含み、前記混練手段は、混練ブレードと前記混練ブレードを回転させる混練モータとを含み、前記粉砕工程と前記練り工程とのうちの少なくともいずれか一方において、前記制御手段は、モータの負荷を監視し、その負荷に基づいて実行中の工程の終了判断を行うこととしてもよい。
【0021】
自動製パン器を用いて穀物粒からパンを製造する場合、例えば穀物粒の硬さのばらつきや自動製パン器が置かれる環境(主に温度)変動によって、粉砕工程の終了時に得られる粉砕粉の粒度や、練り工程の終了時に得られるパン生地の弾力性等にばらつきが発生することがある。この点、本構成では、モータの負荷を基準に粉砕工程及び/又は練り工程の終了時点を判断する構成であるために、粉砕工程や練り工程の終了時のパン原料(パン生地も含む)の状態を安定させることができる。このため、不出来なパンができる可能性を低減できる。なお、粉砕工程と練り工程との両方において、モータの負荷に基づいて終了時点を判断する構成とするのが好ましい。
【0022】
上記構成の自動製パン器において、前記穀物粒用製パンコースには、前記粉砕工程の前に前記パン容器内の穀物粒に液体を吸液させる粉砕前吸液工程が更に含まれるのが好ましい。本構成によれば、穀物粒に液体(代表的なものは水)を含ませた状態で粉砕を行えるので、穀物粒を芯まで粉砕しやすくなる。
【0023】
上記構成の自動製パン器において、前記穀物粒用製パンコースには、前記粉砕工程の後に前記パン容器内の穀物粒の粉砕粉に液体を吸液させる粉砕後吸液工程が更に含まれるのが好ましい。本構成によれば、粉砕後吸液工程によって、粉砕工程で上昇した粉砕粉の温度を冷却する期間が得られるために、冷却装置を用いることなくパンの製造が可能となり、自動製パン器に要するコストを抑制できる。また、この工程によって、粉砕粉が更に崩れて微粒子の量が多くできるために、きめが細く、美味しいパンが焼き上げられる。
【0024】
上記構成の自動製パン器において、外気温度、前記パン容器の温度、前記パン容器周辺の温度、及び前記パン容器内のパン原料温度のうちの少なくともいずれか1つを検知可能な温度検知手段を更に備え、前記穀物粒用製パンコースが実行される場合に行われる複数の工程の中に、前記温度検知手段で検知される温度を利用して工程時間を変動させる工程が少なくとも1つ含まれていることとしてもよい。
【0025】
自動製パン器が置かれる環境によって、穀物粒から焼き上げられるパンの出来栄えが変動する要因に、環境温度や使用する水等の温度が変動することが挙げられる。この点、本構成の自動製パン器では、外気温度、パン原料を投入する容器の温度、前記容器周辺の温度、及び前記容器内のパン原料温度のうちの少なくとも1つを検知可能な温度検知手段を備える構成としている。そして、本構成では、穀物粒用製パンコースが実行される場合に行われる複数の工程の中に、前記温度検知手段で検知される温度を利用して工程時間を変動させる工程が少なくとも1つ含まれるようになっている。このために、環境温度等によってパンの出来栄えが変動する可能性を低減可能である。
【発明の効果】
【0026】
本発明によると、穀物粒から安定して出来の良いパンを製造することが可能になる。このために、家庭でのパン製造をより身近なものとして、家庭でのパン作りが盛んになることが期待できる。
【図面の簡単な説明】
【0027】
【図1】本実施形態の自動製パン器の垂直断面図
【図2】図1に示す本実施形態の自動製パン器を図1と直角の方向に切断した一部垂直断面図
【図3】本実施形態の自動製パン器が備える粉砕ブレード及び混練ブレードの構成を説明するための概略斜視図
【図4】本実施形態の自動製パン器が備える粉砕ブレード及び混練ブレードの構成を説明するための概略平面図
【図5】混練ブレードが折り畳み姿勢にある場合のパン容器の上面図
【図6】混練ブレードが開き姿勢にある場合のパン容器の上面図
【図7】混練ブレードが開き姿勢にある場合のクラッチの状態を示す概略平面図
【図8】本実施形態の自動製パン器の制御ブロック図
【図9】本実施形態の自動製パン器における米粒用製パンコースの流れを示す模式図
【図10】本実施形態の自動製パン器で使用される、温度に対応付けて粉砕前吸水工程の時間を定めたテーブルの一例
【図11】本実施形態の自動製パン器において実行される粉砕工程の詳細フローを示すフローチャート
【図12】本実施形態の自動製パン器において実行される粉砕後吸水工程の詳細フローを示すフローチャート
【図13】本実施形態の自動製パン器において実行される練り工程の詳細フローを示すフローチャート
【図14】本実施形態の自動製パン器において実行される発酵工程の詳細フローを示すフローチャート
【発明を実施するための形態】
【0028】
以下、本発明の自動製パン器の実施形態について、図面を参照しながら詳細に説明する。なお、本明細書に登場する具体的な時間や温度等はあくまでも例示であり、本発明の内容を限定するものではない。
(自動製パン器の構成)
図1は、本実施形態の自動製パン器の垂直断面図である。図2は、図1に示す本実施形態の自動製パン器を図1と直角の方向に切断した一部垂直断面図である。図3は、本実施形態の自動製パン器が備える粉砕ブレード及び混練ブレードの構成を説明するための概略斜視図で、斜め下方から見た場合の図である。図4は、本実施形態の自動製パン器が備える粉砕ブレード及び混練ブレードの構成を説明するための概略平面図で、下から見た場合の図である。図5は、混練ブレードが折り畳み姿勢にある場合のパン容器の上面図である。図6は、混練ブレードが開き姿勢にある場合のパン容器の上面図である。以下、主に図1から図6を参照しながら、自動製パン器の全体構成について説明する。
【0029】
なお、以下においては、図1における左側が自動製パン器1の正面(前面)、右側が自動製パン器1の背面(後面)とする。また、自動製パン器1に正面から向き合った観察者の左手側が自動製パン器1の左側、右手側が自動製パン器1の右側であるものとする。
【0030】
自動製パン器1は、合成樹脂製の外殻により構成される箱形の本体10を有する。本体10には、その左側面と右側面の両端に連結したコの字状の合成樹脂製ハンドル11が設けられ、これにより運搬容易となっている。本体10の上面前部には操作部20が設けられる。操作部20には、図示は省略するが、スタートキー、取り消しキー、タイマーキー、予約キー、パンの製造コース(米粉パンコース、小麦粉パンコース等)を選択する選択キー等の操作キー群と、操作キー群によって設定された内容やエラー等を表示する表示部が設けられている。なお、表示部は、液晶表示パネルと、発光ダイオードを光源とする表示ランプとによって構成されている。
【0031】
操作部20から後ろの本体上面は、合成樹脂製の蓋30で覆われる。蓋30は、図示しない蝶番軸で本体10の背面側に取り付けられており、その蝶番軸を支点として垂直面内で回動する構成となっている。なお、図示しないが、蓋30には耐熱ガラスからなる覗き窓が設けられており、後述の焼成室40を覗けるようになっている。
【0032】
本体10の内部には、平面形状略矩形の焼成室40が設けられている。焼成室40は板金製で、上面が開口しており、ここからパン容器50が入れられる。焼成室40は水平断面略矩形の4つの周側壁40aと底壁40bとを備える。焼成室40の内部には、シーズヒータ41が焼成室40に収容されたパン容器50を包囲するように配置され、パン容器50内のパン原料を加熱できるようになっている。
【0033】
また、焼成室40を構成する4つの周側壁40aのうち、自動製パン器1の左右側に位置する一対の周側壁には、その一方側に発光素子42aが、他方側に受光素子42bが取り付けられている。この発光素子42aと受光素子42bとはフォトインタラプタを構成する。発光素子42aと受光素子42bとは、焼成室40にパン容器50が収容された状態において、パン容器50の上面よりやや高い位置に設けられている。これにより、通常状態においては、発光素子42aからの光が受光素子42bによって受光されるようになっている。そして、パン生地がパン容器50の上面から所定の高さ(例えば5mm等)まで膨らんだ場合に、受光素子42bの受光状態が変化するために、そのことを検知できるようになっている。すなわち、発光素子42aと受光素子42bとは、パン容器50内のパン生地が所定の高さまで膨らんだことを検知する膨らみ検知部42として機能する。
【0034】
なお、発光素子42aと受光素子42bとには、フォトインタラプタを構成する素子として公知の素子を用いればよいが、例えば発光素子42aには近赤外LED(Light emitting diode)等が用いられ、受光素子42bにはフォトトランジスタ等が用いられる。
【0035】
また、本体10の内部には板金製の基台12が設置されている。基台12には、焼成室40の中心にあたる箇所に、アルミニウム合金のダイキャスト成型品からなるパン容器支持部13が固定されている。パン容器支持部13の内部は焼成室40の内部に露出している。
【0036】
パン容器支持部13の中心には原動軸14が垂直に支持されている。原動軸14に回転を与えるのはプーリ15、16である。プーリ15と原動軸14の間、及び、プーリ16と原動軸14の間には、各々クラッチが配置されていて、プーリ15を一方向に回転させて原動軸14に回転を伝える時、原動軸14の回転はプーリ16に伝わらず、プーリ16をプーリ15とは逆方向に回転させて原動軸14に回転を伝えるとき、原動軸14の回転はプーリ15には伝わらない仕組みになっている。
【0037】
プーリ15を回転させるのは、基台12に固定された混練モータ60である。混練モータ60は竪軸であって、下面から出力軸61が突出する。出力軸61には、プーリ15にベルト63で連結されるプーリ62が固定されている。混練モータ60自身が低速・高トルクタイプであり、その上、プーリ62がプーリ15を減速回転させるので、原動軸14は低速・高トルクで回転する。
【0038】
プーリ16を回転させるのは同じく基台12に支持された粉砕モータ64である。粉砕モータ64も竪軸であって、上面から出力軸65が突出する。出力軸65には、プーリ16にベルト67で連結されるプーリ66が固定されている。粉砕モータ64は、後述する粉砕ブレードに高速回転を与える役割を担う。そのため、粉砕モータ64には高速回転のものが選定され、プーリ66とプーリ16の減速比はほぼ1:1になるように設定されている。
【0039】
パン容器50は板金製で、バケツのような形状をしており、口縁部には手提げ用のハンドル(図示せず)が取り付けられている。パン容器50の水平断面は四隅を丸めた矩形である。また、パン容器50の底部には、詳細は後述する粉砕ブレード54とカバー70を収容する凹部55が形成されている。凹部55は平面形状円形で、カバー70の外周部と凹部55の内面の間には、製パン原料の流動を可能とする隙間56が設けられている。また、パン容器50の底面には、アルミニウム合金のダイキャスト成型品である筒状の台座51が設けられている。パン容器50は、この台座51がパン容器支持部13に受け入れられた状態で、焼成室40内に配置されるようになっている。
【0040】
パン容器50の底部中心には、垂直方向に延びるブレード回転軸52が、シール対策が施された状態で支持されている。ブレード回転軸52には、原動軸14よりカップリング53を介して回転力が伝えられる。カップリング53を構成する2部材のうち、一方の部材はブレード回転軸52の下端に固定され、他の部材は原動軸14の上端に固定されている。カップリング53の全体は、台座51とパン容器支持部13に囲い込まれる。
【0041】
パン容器支持部13の内周面と台座51の外周面とには、それぞれ図示しない突起が形成されており、これらの突起は周知のバヨネット結合を構成する。詳細には、パン容器50をパン容器支持部13に取り付ける際、台座51の突起がパン容器支持部13の突起に干渉しないようにしてパン容器50を下ろす。そして、台座51がパン容器支持部13に嵌り込んだ後、パン容器50を水平にひねると、パン容器支持部13の突起の下面に台座51の突起が係合する。これにより、パン容器50が上方に抜けなくなる。また、この操作で、カップリング53の連結も同時に達成される。
【0042】
なお、パン容器50取り付け時のひねり方向は、後述する混練ブレード72の回転方向に一致させ、混練ブレード72が回転してもパン容器50が外れないように構成される。
【0043】
ブレード回転軸52には、パン容器50の底部より少し上の箇所に、粉砕ブレード54が取り付けられている。粉砕ブレード54は、ブレード回転軸52に対して回転不能に取り付けられる。粉砕ブレード54は、ステンレス鋼板製であり、図3及び図4に示すように、飛行機のプロペラのような形状(この形状はあくまでも一例である)を有している。粉砕ブレード54は、ブレード回転軸52から引き抜いて取り外せるようになっており、製パン作業終了後の洗浄や、切れ味が悪くなった時の交換を手軽に行うことができる。
【0044】
ブレード回転軸52の上端には、平面形状円形のドーム状カバー70が回転可能に取り付けられている。カバー70は、アルミニウム合金のダイキャスト成型品からなり、粉砕ブレード54のハブ54aによって受け止められ、粉砕ブレード54を覆い隠す。このカバー70もブレード回転軸52から簡単に引き抜くことができるので、製パン作業終了後の洗浄を手軽に行うことができる。
【0045】
カバー70の上部外面には、ブレード回転軸52から離れた箇所に配置された垂直方向に延びる支軸71により、平面形状「く」の字形の混練ブレード72が取り付けられている。混練ブレード72はアルミニウム合金のダイキャスト成型品である。支軸71は、混練ブレード72に固定ないし一体化されており、混練ブレード72と動きを共にする。
【0046】
混練ブレード72は、支軸71を中心として水平面内で回動し、図5に示す折り畳み姿勢と、図6に示す開き姿勢とをとる。折り畳み姿勢では、混練ブレード72はカバー70に形成したストッパ部73に当接しており、それ以上カバー70に対し時計方向の回動を行うことができない。混練ブレード72の先端は、この時、カバー70から少し突き出している。開き姿勢では、混練ブレード72の先端はストッパ部73から離れ、混練ブレード72の先端はカバー70から大きく突き出す。
【0047】
なお、カバー70には、カバー内空間とカバー外空間を連通する窓74と、各窓74に対応して内面側に設けられて粉砕ブレード54によって粉砕された粉砕物を窓74の方向に誘導するリブ75と、が形成されている。この構成により、粉砕ブレード54を用いた粉砕の効率が高められている。
【0048】
カバー70とブレード回転軸52の間には、図4に示すようにクラッチ76が介在する。クラッチ76は、混練モータ60が原動軸14を回転させるときのブレード回転軸52の回転方向(この回転方向を「正方向回転」とする。図4では時計方向回転となる。)において、ブレード回転軸52とカバー70を連結する。逆に、粉砕モータ64が原動軸14を回転させるときのブレード回転軸52の回転方向(この回転方向を「逆方向回転」とする。図4では反時計方向回転となる。)では、クラッチ76はブレード回転軸52とカバー70の連結を切り離す。なお、図5及び図6では、前記「正方向回転」は反時計方向回転となり、前記「逆方向回転」は時計方向回転となる。
【0049】
クラッチ76は、混練ブレード72の姿勢に応じて連結状態を切り換える。すなわち、混練ブレード72が図5に示す折り畳み姿勢にある場合は、図4に示すように、第2係合体76b(例えば支軸71に固定される)は第1係合体76a(例えば粉砕ブレード54のハブ54aに固定される)の回転軌道に干渉しており、ブレード回転軸52が正方向回転すると、第1係合体76aと第2係合体76bは係合し、ブレード回転軸52の回転力がカバー70及び混練ブレード72に伝達される。一方、混練ブレード72が図6に示す開き姿勢にある場合には、図7に示すように、第2係合体76bは第1係合体76aの回転軌道から逸脱した状態にあり、ブレード回転軸52が逆方向回転しても、第1係合体76aと第2係合体76bは係合しない。従って、ブレード回転軸52の回転力はカバー70及び混練ブレード72に伝達されない。なお、図7は、混練ブレードが開き姿勢にある場合のクラッチの状態を示す概略平面図である。
【0050】
図8は、本実施形態の自動製パン器の制御ブロック図である。図8に示すように、自動製パン器1における制御動作は制御装置81によって行われる。制御装置81は、例えば、CPU(Central Processing Unit)、ROM(Read Only Memory)、RAM(Random Access Memory)、I/O(input/output)回路部等からなるマイクロコンピュータ(マイコン)によって構成される。この制御装置81は、焼成室40の熱の影響を受け難い位置に配置するのが好ましく、自動製パン器1においては、本体10の正面側壁と焼成室40との間に配置されている。
【0051】
制御装置81には、第1温度検知部18と、第2温度検知部19と、上述の操作部20と、上述の発光素子42aと受光素子42bとで構成される膨らみ検知部42と、混練モータ駆動回路82と、粉砕モータ駆動回路83と、ヒータ駆動回路84と、が電気的に接続されている。
【0052】
第1温度検知部18は、図2に示すように本体10の側面に設けられて外気温度を検知可能な温度センサである。第2温度検知部19は、図1に示すように、温度センサ19aとソレノイド19bとを備え、温度センサ19aの先端側が焼成室40の正面側壁から焼成室40内に突出するように設けられている。温度センサ19aの先端は、ソレノイド19bによって、パン容器50に接触する位置と非接触の位置とに切り換えることが可能となっている。なお、図1では、温度センサ19aの先端が、パン容器50に非接触の位置にある場合を示している。第2温度検知部19は、温度センサ19aの先端位置の切り換えによって、焼成室40内の温度(これは、本発明のパン容器周辺の温度の一例である)とパン容器50の温度とを切り換えて検知可能となっている。
【0053】
混練モータ駆動回路82は、制御装置81からの指令の下で混練モータ60の駆動を制御する回路である。また、粉砕モータ駆動回路83は、制御装置81からの指令の下で粉砕モータ64の駆動を制御する回路である。ヒータ駆動回路84は、制御装置81からの指令の下でシーズヒータ41の動作を制御する回路である。
【0054】
制御装置81は、操作部20からの入力信号に基づいてROM等に格納されたパンの製造コース(製パンコース)に係るプログラムを読み出し、混練モータ駆動回路82を介して混練モータ60による混練ブレード72の回転制御、粉砕モータ駆動回路83を介して粉砕モータ64による粉砕ブレード54の回転制御、ヒータ駆動回路84を介してシーズヒータ41による加熱動作を制御を行いながら、自動製パン器1にパンの製造工程を実行させる。また、制御装置81には、時間計測機能が備えられており、パンの製造工程における時間的な制御が可能となっている。
【0055】
なお、制御装置81は本発明の制御手段の実施形態である。また、混練ブレード72、混練モータ60及び混練モータ駆動回路82は本発明の混練手段の実施形態である。また、粉砕ブレード54、粉砕モータ64及び粉砕モータ駆動回路83は本発明の粉砕手段の実施形態である。また、シーズヒータ41及びヒータ駆動回路84は本発明の加熱手段の実施形態である。また、第1温度検知部18及び第2温度検知部19は本発明の温度検知手段の実施形態である。また、膨らみ検知部42は本発明の膨らみ検知手段の実施形態である。
(自動製パン器の動作)
以上のように構成される本実施形態の自動製パン器1は、小麦粉や米粉からパンを製造する(焼き上げる)製パンコースに加えて、米粒(穀物粒の一形態)からパンを製造する(焼き上げる)製パンコース(米粒用製パンコース)を実行できるようになっている。ただし、本実施形態の自動製パン器1は、米粒用製パンコースが実行される場合の制御動作に特徴を有する。このため、以下では、米粒用製パンコースが実行される場合に絞って、自動製パン器1の動作を説明する。
【0056】
図9は、本実施形態の自動製パン器における米粒用製パンコースの流れを示す模式図である。なお、図9において、温度はパン容器50の温度を示している。図9に示すように、米粒用製パンコースにおいては、粉砕前吸水工程(粉砕前吸液工程の一形態)と、粉砕工程と、粉砕後吸水工程(粉砕後吸液工程の一形態)と、練り(捏ね)工程と、発酵工程と、焼成工程と、がこの順番で順次に実行される。なお、発酵工程においては、詳細は後述するが、その途中でガス抜きが行われる場合と行われない場合とがある。
【0057】
米粒用製パンコースでパンを製造するにあたって、ユーザは、パン容器50に、粉砕ブレード54と混練ブレード72付きのカバー70とを取り付ける。そして、ユーザは、米粒と水をそれぞれ所定量ずつ計量(一例として米粒220g、水210g)してパン容器50に入れる。なお、ここでは、米粒と水とを混ぜることにしているが、単なる水の代わりに、例えば、だし汁のような味成分を有する液体、果汁、アルコールを含有する液体等を混ぜるようにしてもよい。ユーザは、米粒と水とを投入したパン容器50を焼成室40に入れて蓋30を閉じ、操作部20によって米粒用製パンコースを選択し、スタートキーを押す。これにより、米粒からパンを製造する米粒用製パンコースが開始される。
【0058】
粉砕前吸水工程は、米粒に水(液体の一形態)を含ませることによって、その後に行われる粉砕工程において、米粒を芯まで粉砕しやすくすることを狙う工程である。制御装置81は、粉砕前吸水工程の開始に際して(例えば、スタートキーを押して即のタイミングでもよいし、しばらく経過してからでもよい)ソレノイド19bを駆動させて温度センサ19aの先端をパン容器50に接触させる。これにより、制御装置81は、温度センサ19aを介してパン容器50の温度を検知する。
【0059】
そして、制御装置81は、検知したパン容器50の温度と、容器温度に対応付けて予め定めた粉砕前吸水工程の時間を示すテーブル(図10参照)と、から粉砕前吸水工程の時間を決定する。このテーブルは、例えば制御装置81のROMに記憶されている。米粒の吸水速度は水の温度によって変動し、水温が高いと吸水速度が高まり、水温が低いと吸水速度が低下する。このために、本実施形態のように、パン容器50の温度(水温を反映した温度を示す)が高い場合には粉砕前吸水工程の時間を短くし、パン容器50の温度が低い場合には粉砕前吸水工程の時間を長くすることよって、米粒の吸水度合いのばらつきを抑制できる。
【0060】
なお、図10のテーブルは、出来の良いパンが得られるように予め実験によって求めたものであるが、単なる一例であり、適宜変更可能である。例えば、図10では5℃毎に粉砕前吸水工程の時間を変更する構成としているが、この温度間隔は大きくしても、小さくしてもよい。また、温度の上限や下限も適宜定めてよい。
【0061】
また、本実施形態では、パン容器50の温度に基づいて粉砕前吸水工程の時間を決定する構成にしているが、これに限らず、パン容器50に入ったパン原料温度を測定できるように構成して、この温度に基づいて粉砕前吸水工程の時間を決定する構成としてもよい。なお、季節によって使用する水が冷たくなったり、温かくなったりする傾向があるために、例えば外気温度や焼成室40の温度(パン容器50周辺の温度)に基づいて粉砕前吸水工程の時間を決定する構成としてもよいが、この場合にはパン容器50内の水温が適切に反映されずに、米粒の吸水度合いにばらつきが生じる可能性がある。このため、パン容器50の温度やパン容器50内のパン原料の温度に基づいて粉砕前吸水工程の時間を決定するのが好ましい。
【0062】
また、粉砕前吸水工程においては、その初期段階で粉砕ブレード54を回転させ、その後も断続的に粉砕ブレード54を回転させるようにしてもよい。このようにすると、米粒の表面に傷をつけることができ、米粒の吸液効率を高められる。
【0063】
上記のように決定された粉砕前吸水工程の時間が経過する(粉砕前吸水工程が終了する)と、制御装置81の指令によって、米粒を粉砕する粉砕工程が実行される。この粉砕工程では、米粒と水との混合物の中で粉砕ブレード54が高速回転される。具体的には、制御装置81は、粉砕モータ64を制御してブレード回転軸52を逆方向回転させ、米粒と水との混合物の中で粉砕ブレード54の回転を開始させる。なお、この際、カバー70もブレード回転軸52の回転に追随して回転を開始するが、次のような動作によってカバー70の回転はすぐに阻止される。
【0064】
粉砕ブレード54を回転させるためのブレード回転軸52の回転に伴うカバー70の回転方向は、図5において時計方向であり、混練ブレード72は、それまで折り畳み姿勢(図5に示す姿勢)であった場合には、米粒と水の混合物から受ける抵抗で開き姿勢(図6に示す姿勢)に転じる。混練ブレード72が開き姿勢になると、図7に示すように、クラッチ76は、第2係合体76bが第1係合体76aの回転軌道から逸脱するために、ブレード回転軸52とカバー70の連結を切り離す。同時に、開き姿勢になった混練ブレード72は図6に示すようにパン容器50の内側壁に当るために、カバー70の回転は阻止される。
【0065】
粉砕工程における米粒の粉砕は、先に行われる粉砕前吸水工程によって米粒に水が浸み込んだ状態で実行されるために、米粒を芯まで容易に粉砕することができる。図11は、本実施形態の自動製パン器において実行される粉砕工程の詳細フローを示すフローチャートである。この図11を参照しながら、以下粉砕工程の詳細フローについて説明する。
【0066】
粉砕工程の開始にあたって、上述のように、制御装置81は粉砕モータ64を制御して粉砕ブレード54の回転を開始させる(ステップS1)。この粉砕ブレード54の回転開始とほぼ同時に、時間測定及び粉砕モータ64に供給される制御電流の値の監視を開始する(ステップS2)。なお、粉砕モータ64に供給される制御電流の値は、粉砕モータ64の負荷と相関関係があるパラメータの一例である。そして、粉砕モータ64の負荷を監視するのは、パン容器50に投入された米粒の粉砕状態を検知することを狙ったものである。
【0067】
粉砕モータ64の制御電流値の監視が開始されると、制御装置81は、まず、電流値が所定レベルに到達したか否かを確認する(ステップS3)。ここで、所定レベルは、出来のよいパンを焼き上げるための好ましい条件として、予め実験によって決めた値(電流値)であり、例えば制御装置81のROMに記憶されている。電流値が所定レベルに到達している場合(ステップS3でYes)には、制御装置81は粉砕ブレード54の回転を停止(ステップS4)して、粉砕工程を終了させる。
【0068】
一方、電流値が所定レベルに到達していない場合(ステップS3でNo)には、制御装置81は、粉砕ブレード54の回転時間が1分を経過したか否かを確認する(ステップS5)。回転時間が1分を経過していない場合(ステップS5でNo)には、ステップS3に戻って、上述の動作を繰り返す。一方、回転時間が1分を経過している場合(ステップS5でYes)には、制御装置81は粉砕ブレード54の回転を停止させる(ステップS6)。制御装置81は、粉砕ブレード54の回転停止期間が3分を経過するまで待って(ステップS7)、その後、粉砕ブレード54の回転を再開させる(ステップS8)。その後は、ステップS3に戻って、上述の動作を繰り返す。
【0069】
このように粉砕工程を進める場合、自動製パン器1が置かれる環境の変動や使用する米粒の硬さのばらつき等があっても、粉砕工程後の水と粉砕粉の混合物の状態(粉砕粉の状態)をほぼ一定とすることが可能である。このために、パンの出来栄えのばらつきを抑制することが可能である。
【0070】
なお、本実施形態の自動製パン器1においては、粉砕ブレード54の回転が開始されてすぐに粉砕モータ64の制御電流値が所定レベルに到達したか否かを確認する構成となっているが、この構成に限定される趣旨ではない。すなわち、例えば粉砕ブレード54の回転を開始した初期段階は電流値が不安定となりやすい。このため、制御電流値が所定レベルに到達したか否かの確認は所定期間経過後から開始するようにしてもよい。
【0071】
また、場合によっては、制御電流値がいつまでも所定レベルに到達しないような場合も起こり得る。このような場合の対策として、例えば、粉砕開始から所定時間経過している場合には、制御電流値が所定レベルに到達していない場合でも粉砕工程を終了するようにしてもよい。また、他の対策として、例えばエラー表示等で異常をユーザに知らせて、粉砕工程を中断するようにしてもよい。
【0072】
また、本実施形態では、粉砕ブレード54の回転は、回転(1分間)と停止(3分)とを繰り返す間欠回転とされ、粉砕モータ64の制御電流値が所定レベルに到達すると、回転動作を停止して粉砕工程を終了するようになっている。しかし、この構成に限定される趣旨ではない。例えば、粉砕ブレード54の回転期間や停止期間は適宜変更してもよい。また、粉砕ブレード54の回転は間欠回転ではなく、連続回転としてもよい。ただし、間欠回転とすることにより、米粒を対流させて満遍なく米粒を粉砕できるために、間欠回転とするのが好ましい。
【0073】
また、本実施形態では、粉砕モータ64の負荷を利用して米粒の粉砕状態を検知することにしている。そして、粉砕モータ64の負荷と相関関係のあるパラメータとして、粉砕モータ64に供給される制御電流値を用いている。しかし、この構成に限定される趣旨ではなく、粉砕モータ64の負荷と相関関係のあるパラメータとして、例えば粉砕モータ64のトルク、粉砕モータ64駆動時の電力値、粉砕モータ64の温度変化等を利用するようにしても構わない。要は、粉砕モータ64の負荷と相関関係のあるパラメータであって、そのパラメータを監視することによって粉砕状態を検知できるものを選択すればよい。
【0074】
また、粉砕工程時においては、パン容器50の振動が大きいために、第2温度検知部19の温度センサ19aはパン容器50に接触しない位置とするのが好ましい。これにより、温度センサ19a及びパン容器50の損傷を防止できる。
【0075】
図9に示すように、粉砕工程においては、粉砕時の摩擦熱によりパン容器50の温度(パン容器50内の粉砕粉の温度)が上昇する。そして、パン容器50の温度は例えば40〜45℃程度となる。このような状態で、イーストを投入してパン生地作りを行うと、イーストが働かず出来の良いパンを製造することができない。このような点等を考慮して、自動製パン器1では、粉砕工程の後に、米粒の粉砕粉を水に浸漬した状態で放置する粉砕後吸水工程を設けている。
【0076】
この粉砕後吸水工程は、米粒の粉砕粉の温度を低下させる冷却期間であると同時に、粉砕粉に更に水を吸水させて、微粒子の量を増やす役割も担う工程である。このように、微粒子を増やすことにより、きめの細かいパンを焼き上げることが可能になる。粉砕後吸水工程は、予め決められた所定の時間だけ行う構成としてもよいが、このような構成の場合、例えば環境温度によって、次に行う練り工程の開始時におけるパン容器50(パン原料)の温度にばらつきが生じて、出来の良いパンが得られない場合がある。
【0077】
このため、1つの対策として、第1温度検知部18(外気温度を検知するもの)、或いは、第2温度検知部19(温度センサ19aの先端をパン容器50に接触させない状態とする。すなわち、パン容器50周辺の温度(焼成室40内の温度)を検知するモードで使用)によって、例えば粉砕工程の終了時(場合によっては粉砕工程の開始前でもよい)に環境温度を検知し、この環境温度に基づいて粉砕後吸水工程の時間を決定するようにしてもよい。これにより、粉砕後吸水工程が終了した段階におけるパン容器50の温度のばらつきを抑制できる。
【0078】
具体的には、例えば予め実験により、環境温度と、粉砕工程後のパン容器50の温度が最適な温度(例えば28℃〜30℃程度)となる時間との関係を調べてテーブルを作成し、このテーブルを制御装置81のROMに記憶させておく。例えば、図10のテーブルと同様に、一定範囲の環境温度について、5℃間隔で最適な吸水時間を調べて記憶させておく。そして、前述のように環境温度を検知し、検知された温度と予め制御装置81のROMに記憶させておいたテーブルとから吸水時間を決定して粉砕後吸水工程を実行する。なお、粉砕後吸水工程の場合は、環境温度が高い場合に工程時間を長くし、環境温度が低い場合に工程時間を短くする必要がある。
【0079】
本実施形態の自動製パン器1においては、粉砕後吸水工程は上記の手法ではなく、図12に示すような別の手法で、粉砕後吸水工程の工程時間を適宜変動させて粉砕後吸水工程を実行するようになっている。以下、これについて説明する。
【0080】
粉砕工程が終了すると、制御装置81は第1温度検知部18によって外気温度を検知する(ステップS11)。検知された外気温度が予め設定された所定の温度以下であるか否かを確認する(ステップS12)。所定の温度は、練り工程を開始するに際して好ましい温度であり、例えば28℃以上30℃以下の温度に設定される。
【0081】
外気温度が所定の温度以下である場合(ステップS12でYes)には、制御装置81は第2温度検知部19によってパン容器50の温度を検知する(ステップS13)。なお、ここでは、第2温度検知部19の温度センサ19aの先端がパン容器50に接触した状態で温度検知を行う。そして、制御装置81は、検知されたパン容器50の温度が所定の温度以下であるか否かを確認する(ステップS14)。
【0082】
検知されたパン容器50の温度が所定の温度以下である場合(ステップS14でYes)には、制御装置81は、粉砕後吸水工程が開始されてから予め設定された第1の時間(例えば30分)が経過しているか否かを確認する(ステップS15)。この第1の時間は、粉砕後吸水工程の時間が短くなりすぎないように設けられている。すなわち、上述のように粉砕後吸水工程は、粉砕工程で得られた粉砕粉に更に水を吸水させることにより、粉砕粉の微粒子の量を増加させる役割も担う。このため、粉砕後吸水工程があまりに短くなると好ましくないために、第1の時間は設定されている。ただし、第1の時間をあまり長く設定すると、粉砕粉の冷却が進みすぎて、練り工程開始時の温度ばらつきの要因ともなるために、このような事態が発生しないように第1の時間を設定するのが好ましい。なお、第1の時間を経過しているか否かを確認するステップS15は、設けない構成としても構わない。
【0083】
粉砕後吸水工程が開始されてから第1の時間が経過している場合(ステップS15でYes)には、制御装置81は粉砕後吸水工程を終了する。一方、粉砕後吸水工程が開始されてから第1の時間が経過していない場合(ステップS15でNo)には、制御装置81は第1の時間が経過するまで待って、粉砕後吸水工程を終了する。
【0084】
検知されたパン容器50の温度が所定の温度より高い場合(ステップS14でNo)には、制御装置81は、粉砕後吸水工程が開始されてから予め設定された第2の時間(第1の時間よりも長い時間であり、例えば60分)が経過しているか否かを確認する(ステップS16)。そして、第2の時間を経過している場合(ステップS16でYes)には、パン容器50の温度が所定の温度に到達していなくても粉砕後吸水工程を終了する。一方、第2の時間を経過していない場合(ステップS16でNo)には、ステップS13に戻り、ステップS13以降の動作を行う。
【0085】
粉砕後吸水工程の開始から第2の時間を経過したか否かを確認するステップS16は、次のような理由により設けられる。すなわち、パン容器50の温度が、所定の温度まで下がるのに、非常に長い時間を要する場合も想定される。このような場合に、いつまでも練り工程を開始しないとパンの製造時間が著しく長くなって、ユーザが不便に感じる可能性もある。このため、粉砕後吸水工程の時間があまりにも長くなり過ぎないように、吸水時間の上限を設定するものである。ただし、このステップS16は設けない構成としてもよい。この場合には、パン容器50の温度が所定の温度になるまで待って、粉砕後吸水工程を終了することになる。
【0086】
ところで、外気温度が所定の温度より高い場合には、粉砕後吸水工程において、パン容器50の温度を所定の温度まで下げるのは無理である。このために、この場合には、原則として外気温度まで下がった時点で粉砕後吸水工程を終了することにしている。詳細には、次のように処理される。
【0087】
すなわち、ステップS12において、外気温度が所定の温度より高い場合(ステップS12でNo)、制御装置81は第2温度検知部19によってパン容器50の温度を検知する(ステップS17)。そして、制御装置81は、検知されたパン容器50の温度が外気温度以下であるか否かを確認する(ステップS18)。
【0088】
検知されたパン容器50の温度が外気温度以下である場合(ステップS18でYes)には、制御装置81は、粉砕後吸水工程が開始されてから第1の時間が経過しているか否かを確認する(ステップS19)。この第1の時間は、ステップS5の場合と同様の趣旨で定められるものである。そして、ステップ5と同様にステップS19を設けない構成としてもよい。
【0089】
粉砕後吸水工程が開始されてから第1の時間が経過している場合(ステップS19でYes)には、制御装置81は粉砕後吸水工程を終了する。一方、粉砕後吸水工程が開始されてから第1の時間が経過していない場合(ステップS19でNo)には、制御装置81は第1の時間が経過するまで待って、粉砕後吸水工程を終了する。
【0090】
検知されたパン容器50の温度が外気温度より高い場合(ステップS18でNo)には、制御装置81は、粉砕後吸水工程が開始されてから予め設定された第2の時間が経過しているか否かを確認する(ステップS20)。そして、第2の時間を経過している場合(ステップS20でYes)には、パン容器50の温度が外気温度に到達していなくても粉砕後吸水工程を終了する。一方、第2の時間を経過していない場合(ステップS20でNo)には、ステップS17に戻り、ステップS17以降の動作を行う。
【0091】
なお、ステップS20を設ける趣旨は、ステップS16を設ける趣旨と同様である。ステップS20はステップS16と同様に設けない構成としても構わない。この場合には、パン容器50の温度が外気温度になるまで待って、粉砕後吸水工程を終了することになる。
【0092】
また、本実施形態では、パン容器50の温度に基づいて粉砕後吸水工程の時間を変動させる構成としているが、パン容器50内のパン原料温度に基づいて粉砕後吸水工程の時間を変動させる構成としてもよい。
【0093】
また、本実施形態では、粉砕後吸水工程に要する時間(粉砕後吸水工程の終了時期)を、粉砕後吸水工程中にパン容器50の温度を適宜検知しながら決定する構成とした。これに代えて、粉砕後吸水工程の開始時に、例えば外気温度及びパン容器50の温度を検知し、外気温度によって予想されるパン容器50の温度低下率(予め実験によって求めておく必要がある)とパン容器50の温度から、粉砕後吸水工程に要する時間を決定する構成等としても構わない。
【0094】
粉砕後吸水工程が終了すると、続いて練り工程が行われる。練り工程の開始時には、グルテンや、食塩、砂糖、ショートニングといった調味料がそれぞれ所定量(一例として、グルテン50g、砂糖16g、塩4g、ショートニング10g)パン容器50に投入される。この投入は、例えばユーザの手によって投入するようにしてもよいし、自動投入装置を設けてユーザの手を煩わせることなくそれらを投入するようにしてもよい。
【0095】
なお、グルテンは、パン原料として必須のものではない。このため、好みに応じてパン原料に加えるか否かを判断してよい。また、グルテンの代わりに増粘安定剤(例えばグアガム)や小麦粉等を投入するようにしても構わない。
【0096】
練り工程の開始にあっては、制御装置81は混練モータ60を制御してブレード回転軸52を正方向回転させる。このブレード回転軸52の正方向回転に追随してカバー70が正方向(図6においては反時計方向)に回転すると、パン容器50内のパン原料からの抵抗を受けて混練ブレード72が開き姿勢(図6参照)から折り畳み姿勢(図5参照)に転じる。これを受けてクラッチ76は、図4に示すように、第2係合体76bが第1係合体76aの回転軌道に干渉する角度となり、ブレード回転軸52とカバー70を連結する。これにより、カバー70と混練ブレード72は、ブレード回転軸52と一体となって正方向に回転する。なお、混練ブレード72の回転は低速・高トルクとされる。
【0097】
混練ブレード72の回転によってパン原料は混練され、所定の弾力を有する一つにつながった生地(dough)に練り上げられていく。混練ブレード72が生地を振り回してパン容器50の内壁にたたきつけることにより、混練に「捏ね」の要素が加わることになる。図13は、本実施形態の自動製パン器において実行される練り工程の詳細フローを示すフローチャートである。この図13を参照しながら、以下練り工程の詳細フローについて説明する。
【0098】
粉砕後吸水工程が終了して、パン容器50にグルテンや調味料が投入されると、制御装置81は、混練モータ60を制御して混練ブレード72の回転を開始させる(ステップS21)。また、この混練ブレード72の回転開始とほぼ同時に、制御装置81は時間測定を開始する(ステップS22)。時間測定を開始してから所定時間が経過するまで、パン容器50内のパン原料を混練ブレード60によって混練する(ステップS23)。なお、正確には、本実施形態においては、この間の混練ブレード72の回転は間欠回転である。ただし、この間の混練ブレード72の回転は連続回転としてもよい。
【0099】
所定時間が経過すると、制御装置81は混練ブレード72の回転を停止させる(ステップS24)。そして、この混練ブレード72が停止されている間に、イースト(例えばドライイースト)の投入が行われる。このイーストは、ユーザの手によって投入するようにしてもよいし、自動投入装置を設けて自動投入するようにしてもよい。なお、イーストをグルテン等と一緒に投入しないのは、イースト(ドライイースト)と水とが直接接触するのをなるべく避けると共に、イーストの飛散を防止するためである。ただし、場合によっては、イーストをグルテン等と同時に投入してもよい。また、本実施形態では、混練ブレード72を停止した状態でイーストを投入するようにしているが、混練ブレード72を回転しながらイーストを投入するようにしてもよい。
【0100】
混練ブレード72が停止されている期間にイーストが投入されると、制御装置81は、混練ブレード72の回転を再開させると共に、混練モータ60に供給される制御電流の値の監視を開始する(ステップS25)。本実施形態では、イースト投入後の混練ブレード72の回転は連続回転としている。混練ブレード72が回転すると、制御装置81は電流値が所定レベルに到達したか否かを確認する(ステップS26)。この確認は電流値が所定レベルに到達するまで行われる。そして、電流値が所定のレベルに到達した段階で混練ブレード72を停止して練り工程を終了する。
【0101】
なお、所定レベルは、出来のよいパンを焼き上げるための好ましい条件として、予め実験によって決めた値(電流値)であり、例えば制御装置81のROMに記憶されている。また、混練モータ60に供給される制御電流の値は、混練モータ60の負荷と相関関係があるパラメータの一例であり、その他、例えば混練モータ60のトルク、混練モータ60駆動時の電力値、混練モータ60の温度変化等を前記パラメータとして利用しても構わない。なお、混練モータ60の負荷を監視するのは、パン容器50のパン生地の状態を検知することを狙ったものである。
【0102】
なお、本実施形態の自動製パン器1においては、混練ブレード72の回転が再開されてすぐに混練モータ60の制御電流値が所定レベルに到達したか否かを確認する構成となっているが、この構成に限定される趣旨ではない。すなわち、例えば混練ブレード72の回転を再開した初期段階は電流値が不安定となりやすい。このため、制御電流値が所定レベルに到達したか否かの確認は所定期間経過後から開始するようにしてもよい。
【0103】
また、場合によっては、制御電流値がいつまでも所定レベルに到達しないような場合も起こり得る。このような場合の対策として、例えば、混練ブレード72の回転再開から所定時間経過している場合には、制御電流値が所定レベルに到達していない場合でも練り工程を終了するようにしてもよい。また、他の対策として、例えばエラー表示等で異常をユーザに知らせて、練り工程を中断するようにしてもよい。
【0104】
また、自動製パン器1においては、この練り工程において、制御装置81はシーズヒータ41を制御して焼成室40の温度が所定の温度(例えば32℃等)となるように調整している。この場合、第2温度検知部19の温度センサ19aの先端はパン容器50に接触しない位置にある。このため、パン容器50の振動が大きい練り工程において、温度センサ19a及びパン容器50の損傷は発生し難い。また、具材(例えばレーズン等)入りのパンを焼く場合には、この練り工程の途中で投入するようにすればよい。
【0105】
練り工程が終了すると、制御装置81の指令によって、パン生地を発酵に適した温度(発酵温度)で発酵させる発酵工程が行われる。図14は、本実施形態の自動製パン器において実行される発酵工程の詳細フローを示すフローチャートである。以下、図14を参照しながら発酵工程の詳細なフローについて説明する。
【0106】
練り工程が終了すると、制御装置81は、まず、シーズヒータ41を制御して、焼成室40の温度が予め定めた発酵温度(例えば38℃等)となるように温度制御を開始すると共に、時間計測を開始する。また、これらとほぼ同時に膨らみ検知部42の監視を開始する(ステップS31)。なお、発酵工程における焼成室40の温度検知は、第2温度検知部19のソレノイド19bの駆動を停止して温度センサ19aがパン容器50から離れた状態で行われる。
【0107】
次に、制御装置81は、第1の所定時間が経過していないことを確認する(ステップS32)。この第1の所定時間は、このままの状態でパン生地の発酵を続けるとパン生地に大きな空洞ができてしまって上質のパンを得られない可能性が高くなる時間、として実験によって求められる時間である。本実施形態の自動製パン器1では60分としているが、この時間は適宜変更してよい。
【0108】
第1の所定時間が経過していない場合(ステップS32でYes)には、制御装置81は膨らみ検知部42が検知状態である(パン生地が所定の高さ(例えばパン容器50の上面から5mmの高さ)まで膨らんでいる状態である)か否かを確認する(ステップS33)。膨らみ検知部42が検知状態である場合(ステップS33でYes)には、制御装置81はパン生地が丁度良い具合に発酵し、これ以上発酵を続けるとパン生地が膨らみ過ぎて都合が悪い(例えば、大きな空洞が発生したり、パン生地が蓋30に付着してしまったりする等)と判断し、発酵工程を終了させる(ステップS34)。一方、膨らみ検知部42が検知状態でない(パン生地が所定の高さまで膨らんでいない状態である)場合(ステップS33でNo)には、制御装置81はステップ32に戻って繰り返し処理を行う。
【0109】
第1の所定時間が経過している場合(ステップS32でNo)には、制御装置81は、第2の所定時間が経過していないことを確認する(ステップS35)。この第2の所定時間は、パン生地が丁度良い具合に発酵する(膨らみ検知部42によって検知される状態までパン生地が膨らんだ状態となる)までに要する時間(発酵工程開始からの時間)として、どんなに長くかかる場合でも通常はこの時間を超えないであろうという基準で決められる時間であり、実験的に求められるものである。本実施形態の自動製パン器1では80分としているが、この時間は適宜変更してよい。
【0110】
第2の所定時間が経過していない場合(ステップS35でYes)には、制御装置81は膨らみ検知部42が検知状態である(パン生地が所定の高さまで膨らんでいる状態である)か否かを確認する(ステップS36)。膨らみ検知部42が検知状態である場合(ステップS36でYes)には、制御装置81は、混練モータ60を制御して混練ブレード72を非常にゆっくりとした速度(例えば10.8rpm)で短時間(例えば10秒)回転させて、パン生地に溜まったガスを抜くガス抜きを行う(ステップS37)。これにより、パン生地は萎んで所定の高さ(例えばパン容器50の上面から5mmの高さ)より低くなる。一方、膨らみ検知部42が検知状態でない場合(ステップS36でNo)には、制御装置81はステップ35に戻って繰り返し処理を行う。
【0111】
第1の所定時間を経過した後であって第2の所定時間を経過するまでの間に、膨らみ検知部42で検知されたパン生地には、ガスが溜まって大きな空洞が形成されている可能性が高い。このような状態でパンを焼くと内部に大きな空洞を有するパンが焼き上がることになって好ましくない。このために、パン内部に大きな空洞が形成されないように、発酵工程の途中でガス抜きを行うことにしている。なお、ガス抜きを行う際に、混練ブレード72を高速で回すとパン生地が潰れてしまって、ふっくらしたパンを焼き上げ難くなる。このため、本実施形態のように、ガス抜きにおける混練ブレード72の回転は低速で行うのが好ましく、また、その時間も短時間が好ましい。
【0112】
ガス抜きを行った後は、ガス抜きが終了した時点から第3の所定時間が経過していないことを確認する(ステップS38)。この第3の所定時間は、ガス抜きを行った後のパン生地が丁度良い具合に膨らむ(膨らみ検知部42によって検知される状態までパン生地が膨らむ)までに要する時間(ガス抜き後からの時間)として、どんなに長くかかる場合でも通常はこの時間を超えないであろうという基準で決められる時間であり、実験的に求められるものである。本実施形態の自動製パン器1では50分としているが、この時間は適宜変更してよい。
【0113】
第3の所定時間が経過していない場合(ステップS38でYes)には、制御装置81は膨らみ検知部42が検知状態である(パン生地が所定の高さまで膨らんでいる状態である)か否かを確認する(ステップS39)。膨らみ検知部42が検知状態である場合(ステップS39でYes)には、制御装置81はパン生地が丁度良い具合に発酵し、これ以上発酵を続けるとパン生地が膨らみ過ぎて都合が悪い(例えば、大きな空洞が発生したり、パン生地が蓋30に付着してしまったりする等)と判断し、発酵工程を終了させる(ステップS34)。一方、膨らみ検知部42が検知状態でない場合(ステップS39でNo)には、制御装置81はステップ38に戻って繰り返し処理を行う。
【0114】
ところで、ステップS35で第2の所定時間が経過していると判断される場合(ステップS35でNo)、及び、ステップS38で第3の所定時間が経過していると判断される場合(ステップS38でNo)には、パン生地の膨らみが不十分であるが、制御装置81は発酵工程を終了させる(ステップ34)。
【0115】
上述のように、第2の所定時間及び第3の所定時間は、通常は、この時間が経過するまでにパン生地が膨らみ検知部42で検知されるように設定されている。このため、この状態(ステップS35でNo、及び、ステップS38でNo)で更にパン生地が膨らむのを待っても、なかなかパン生地が所望の状態に膨らまない可能性が高い。そこで、パンの製造工程が徒に長くなってしまうことを避けるために、上述のように発酵工程を終了させることにしている。第2の所定時間及び第3の所定時間は、このような意図で設けられるものであるが、場合によっては、ステップS35やステップS38は設けないようにしてもよい。ただし、本実施形態のように構成するのが好ましい。
【0116】
なお、このような状態(ステップS35でNo、及び、ステップS38でNo)は、通常は起こらないはずであり、このような状態が発生した場合には上質のパンを焼き上げることができない可能性が高い。このため、発酵工程に続いて行われる焼成工程を開始する前に、ユーザに報知音やエラー表示等で、このような事態を知らせるようにしてもよいし、場合によっては、パンの製造を中断するようにしてもよい。
【0117】
以上のように発酵工程を行うと、例えば自動製パン器1が置かれた環境や原料の変動(特にイースト量の変動)等によらず、発酵状態のばらつきを抑制して発酵工程を終了させることが可能である。このため、発酵工程における不具合が原因となって不出来なパンが製造される可能性を低減できる。また、発酵工程において、パン生地が自動製パン器1の蓋30の裏側に付着するのを防止できる。
【0118】
なお、本実施形態の自動製パン器1では、第1から第3の所定時間を固定値として制御装置81のROM等に記憶させて使用する構成としているが、この構成に限定されない。すなわち、例えば第1から第3の所定時間について、環境温度に対応して複数用意しておき(ROM等にテーブルを記憶させておく)、自動製パン器1が置かれる環境温度に対応して適宜変動させるようにしてもよい。
【0119】
発酵工程が終了すると、制御装置81の指令によって続いて焼成工程が実行される。制御装置81は、シーズヒータ41を制御して、焼成室40の温度を、パン焼きを行うのに適した温度(例えば125℃)まで上昇させ、焼成環境下で所定の時間(本実施形態では50分)パンを焼く。焼成工程の終了については、例えば操作部20の図示しない液晶表示パネルにおける表示や報知音等によってユーザに知らされる。ユーザは、製パン完了を検知すると、蓋30を開けてパン容器50を取り出す。
【0120】
なお、この焼成工程でも、自動製パン器1が置かれる環境温度(外気温度)によって、パンを焼き上げるのに適した温度にまで到達する時間に差が出る場合がある。このために、この焼成工程でも外気温度に基づいて焼成工程の時間が変動される構成としてもよい。
【0121】
以上のように、本実施形態の自動製パン器1によれば、米粒からパンを焼き上げることが可能であるために、非常に便利である。そして、自動製パン器1が置かれる環境温度の変動、パン原料として使用する米粒の硬さのばらつき、パン原料の投入量の誤差等に影響を抑制できるように米粒用製パンコースは工夫されているために、米粒から出来の良い(上質の)パンを安定して製造することが可能である。
(その他)
なお、以上に示した自動製パン器は本発明の一例であり、本発明が適用される自動製パン器の構成は、以上に示した実施形態に限定されるものではない。
【0122】
例えば、以上に示した実施形態では、米粒からパンを製造する構成としたが、米粒に限らず、小麦、大麦、粟、稗、蕎麦、とうもろこし、大豆等の穀物粒を原料としてパンを製造する場合にも、本発明は適用されるものである。
【0123】
また、以上に示した実施形態では、膨らみ検知部42を構成する発光素子42aと受光素子42bとを、焼成室40を構成する4つの周側壁40aのうち、自動製パン器1の左右側に位置する一対の周側壁に設ける構成とした。しかし、この構成に限定される趣旨ではない。すなわち、例えば、自動製パン器1の前後側に位置する一対の周側壁に、発光素子42a及び受光素子42bを設ける構成等としても構わない。また、発光素子42a及び受光素子42bを、焼成室40の周側壁40aに設けるのではなく、例えば、蓋30の裏側やパン容器50に設ける構成等としても構わない。また、本実施形態では、膨らみ検知部42を構成するフォトインタラプタは、いわゆる光透過型の構成であるが、場合によっては光反射型の構成としてもよい。
【0124】
また、以上に示した実施形態では、膨らみ検知部42をフォトインタラプタで構成したが、この構成に限定される趣旨ではない。すなわち、例えば、膨らみ検知部を、金属等の細線と、この細線に加わる張力の変化を検知する張力検知手段と、で構成しても構わない。この場合、細線はパン容器50の上面から所定の高さだけ離れるように設けられる。細線の両端は、例えば焼成室40の周側壁40aに固定され、一方端側において張力検知手段によって張力変化を検知できるようにする。このようにすれば、パン生地がパン容器50の上面から所定の高さを超えると細線に加わる張力に変化が生じるので、パン生地がパン容器50の上面から所定の高さを超えて膨らんだことを検知できる。なお、この構成の場合には、パン容器50を焼成室40に収容した後に、細線をセットする必要がある。
【0125】
また、以上に示した実施形態では、粉砕工程及び練り工程において、モータの負荷(詳細には電流値)を監視し、その負荷に基づいて実行中の工程の終了判断を行う構成とした。しかし、いずれか一方についてのみ、モータの負荷に基づいて実行中の工程の終了判断を行う構成としても構わない。
【0126】
例えば、練り工程について、モータの負荷に基づいて実行中の工程の終了判断を行わない場合、次のように練り工程を実行してもよい。すなわち、練り工程を開始するに際し、第1温度検出部18によって外気温度を検知する。そして、検知した外気温度と、外気温度に対応付けて予め定めた練り工程の時間を示すテーブルと、から練り工程の時間を決定する。このテーブルは、例えば制御装置81のROMに記憶する。練り工程によって出来上がるパン生地の出来栄えは、自動製パン器1が置かれる環境温度による影響を受け易いが、このように構成することで、環境温度の変動によるパンの出来栄えの変動を抑制できる。なお、外気温度に基づいて練り工程の時間を決定する代わりに、パン容器50周辺の温度(例えば焼成室40の温度)に基づいて練り工程の時間を決定する構成としてもよい。
【0127】
また、以上に示した実施形態では、粉砕前吸水工程及び粉砕後吸水工程において、温度検知部で検知された温度を利用して工程時間を変動させる構成とした。しかし、この構成に限らず、上記2つの工程のうちの少なくともいずれか一方について、工程時間を所定の時間に固定する構成としても構わない。
【0128】
また、以上に示した米粒用製パンコースで実行される製造工程は例示であり、他の製造工程としてもよい。例を挙げると、以上に示した実施形態では、米粒からパンを製造するにあたって、粉砕工程を行う前後に吸水工程を行う構成としているが、これらの吸水工程を行わない構成等としてもよい。
【0129】
その他、以上に示した実施形態では、自動製パン器1が粉砕ブレード54と混練ブレード72との2つのブレードを備え、その各々に対して別々にモータを設けるる構成とした。しかし、これに限らず、例えば粉砕と混練とを兼用するブレード及びモータを備える構成としてもよい。また、自動製パン器によって実行される製パンコースが、米粒用製パンコースのみである構成でもよい。
【産業上の利用可能性】
【0130】
本発明は、家庭用の自動製パン器に好適である。
【符号の説明】
【0131】
1 自動製パン器
18 第1温度検知部(温度検知手段の一部)
19 第2温度検知部(温度検知手段の一部)
41 シーズヒータ(加熱手段の一部)
42 膨らみ検知部(膨らみ検知手段)
42a 発光素子(膨らみ検知手段の一部)
42b 受光素子(膨らみ検知手段の一部)
50 パン容器
54 粉砕ブレード(粉砕手段の一部)
60 混練モータ(混練手段の一部)
64 粉砕モータ(粉砕手段の一部)
72 混練ブレード(混練手段の一部)
81 制御装置(制御手段)
82 混練モータ駆動回路(混練手段の一部)
83 粉砕モータ駆動回路(粉砕手段の一部)
84 ヒータ駆動回路(加熱手段の一部)
【特許請求の範囲】
【請求項1】
パン原料が投入されるパン容器と、
パン原料として前記パン容器に投入された穀物粒を粉砕する粉砕手段と、
前記パン容器内のパン原料をパン生地に練り上げる混練手段と、
前記パン容器内のパン原料を加熱する加熱手段と、
前記パン容器内のパン生地が所定の高さまで膨らんだことを検知する膨らみ検知手段と、
前記粉砕手段、前記混練手段、及び前記加熱手段を制御して、穀物粒を用いてパンを焼き上げる穀物粒用製パンコースを実行させる制御手段と、を備え、
前記穀物粒用製パンコースには、前記パン容器に投入された穀物粒と液体との混合物を前記粉砕手段によって粉砕する粉砕工程と、前記穀物粒の粉砕粉を含む前記パン容器内のパン原料を前記混練手段によってパン生地に練り上げる練り工程と、練り上げられたパン生地を発酵させる発酵工程と、発酵させたパン生地を焼成する焼成工程と、が含まれ、
前記制御手段は、前記膨らみ検知手段から得られる情報に基づいて、前記発酵工程の途中でガス抜きを行うか否かを判断するとともに、前記発酵工程においてパン生地が前記所定の高さを超えて膨らまないように制御を行うことを特徴とする自動製パン器。
【請求項2】
前記制御手段は、前記発酵工程が開始されてから第1の所定時間が経過するまでに、前記膨らみ検知手段が検知状態となった場合には、検知状態となった段階で前記ガス抜きを行うことなく前記発酵工程を終了させ、前記第1の所定時間が経過するまでに前記膨らみ検知手段が検知状態とならない場合には、前記混練手段を用いて前記ガス抜きを実行させる場合があることを特徴とする請求項1に記載の自動製パン器。
【請求項3】
前記制御手段は、前記発酵工程が開始されてから前記第1の所定時間より長い第2の所定時間が経過するまでに前記膨らみ検知手段が検知状態となった場合には、検知状態となった段階で前記ガス抜きを実行させ、前記第2の所定時間が経過するまでに前記膨らみ検知手段が検知状態とならない場合には、前記ガス抜きを行うことなく前記発酵工程を終了させることを特徴とする請求項2に記載の自動製パン器。
【請求項4】
前記制御手段は、前記ガス抜きが実行された場合に、前記ガス抜きが終了してから第3の所定時間が経過するまでに前記膨らみ検知手段が検知状態となった場合には、検知状態となった段階で前記発酵工程を終了させ、前記第3の所定時間が経過するまでに前記膨らみ検知手段が検知状態とならない場合には、前記第3の所定時間が経過した段階で前記発酵工程を終了させることを特徴とする請求項2又は3に記載の自動製パン器。
【請求項5】
前記膨らみ検知手段は、発光素子からの光を受光素子により受光可能に設けられ、受光状態の変化に基づいてパン生地が前記所定の高さまで膨らんだことを検知するフォトインタラプタであることを特徴とする請求項1から4のいずれかに記載の自動製パン器。
【請求項6】
前記粉砕手段は、粉砕ブレードと前記粉砕ブレードを回転させる粉砕モータとを含み、
前記混練手段は、混練ブレードと前記混練ブレードを回転させる混練モータとを含み、
前記粉砕工程と前記練り工程とのうちの少なくともいずれか一方において、前記制御手段は、モータの負荷を監視し、その負荷に基づいて実行中の工程の終了判断を行うことを特徴とする請求項1から5のいずれかに記載の自動製パン器。
【請求項7】
前記穀物粒用製パンコースには、前記粉砕工程の前に前記パン容器内の穀物粒に液体を吸液させる粉砕前吸液工程が更に含まれることを特徴とする請求項1から6のいずれかに記載の自動製パン器。
【請求項8】
前記穀物粒用製パンコースには、前記粉砕工程の後に前記パン容器内の穀物粒の粉砕粉に液体を吸液させる粉砕後吸液工程が更に含まれることを特徴とする請求項1から7のいずれかに記載の自動製パン器。
【請求項9】
外気温度、前記パン容器の温度、前記パン容器周辺の温度、及び前記パン容器内のパン原料温度のうちの少なくともいずれか1つを検知可能な温度検知手段を更に備え、
前記穀物粒用製パンコースが実行される場合に行われる複数の工程の中に、前記温度検知手段で検知される温度を利用して工程時間を変動させる工程が少なくとも1つ含まれていることを特徴とする請求項1から8のいずれかに記載の自動製パン器。
【請求項1】
パン原料が投入されるパン容器と、
パン原料として前記パン容器に投入された穀物粒を粉砕する粉砕手段と、
前記パン容器内のパン原料をパン生地に練り上げる混練手段と、
前記パン容器内のパン原料を加熱する加熱手段と、
前記パン容器内のパン生地が所定の高さまで膨らんだことを検知する膨らみ検知手段と、
前記粉砕手段、前記混練手段、及び前記加熱手段を制御して、穀物粒を用いてパンを焼き上げる穀物粒用製パンコースを実行させる制御手段と、を備え、
前記穀物粒用製パンコースには、前記パン容器に投入された穀物粒と液体との混合物を前記粉砕手段によって粉砕する粉砕工程と、前記穀物粒の粉砕粉を含む前記パン容器内のパン原料を前記混練手段によってパン生地に練り上げる練り工程と、練り上げられたパン生地を発酵させる発酵工程と、発酵させたパン生地を焼成する焼成工程と、が含まれ、
前記制御手段は、前記膨らみ検知手段から得られる情報に基づいて、前記発酵工程の途中でガス抜きを行うか否かを判断するとともに、前記発酵工程においてパン生地が前記所定の高さを超えて膨らまないように制御を行うことを特徴とする自動製パン器。
【請求項2】
前記制御手段は、前記発酵工程が開始されてから第1の所定時間が経過するまでに、前記膨らみ検知手段が検知状態となった場合には、検知状態となった段階で前記ガス抜きを行うことなく前記発酵工程を終了させ、前記第1の所定時間が経過するまでに前記膨らみ検知手段が検知状態とならない場合には、前記混練手段を用いて前記ガス抜きを実行させる場合があることを特徴とする請求項1に記載の自動製パン器。
【請求項3】
前記制御手段は、前記発酵工程が開始されてから前記第1の所定時間より長い第2の所定時間が経過するまでに前記膨らみ検知手段が検知状態となった場合には、検知状態となった段階で前記ガス抜きを実行させ、前記第2の所定時間が経過するまでに前記膨らみ検知手段が検知状態とならない場合には、前記ガス抜きを行うことなく前記発酵工程を終了させることを特徴とする請求項2に記載の自動製パン器。
【請求項4】
前記制御手段は、前記ガス抜きが実行された場合に、前記ガス抜きが終了してから第3の所定時間が経過するまでに前記膨らみ検知手段が検知状態となった場合には、検知状態となった段階で前記発酵工程を終了させ、前記第3の所定時間が経過するまでに前記膨らみ検知手段が検知状態とならない場合には、前記第3の所定時間が経過した段階で前記発酵工程を終了させることを特徴とする請求項2又は3に記載の自動製パン器。
【請求項5】
前記膨らみ検知手段は、発光素子からの光を受光素子により受光可能に設けられ、受光状態の変化に基づいてパン生地が前記所定の高さまで膨らんだことを検知するフォトインタラプタであることを特徴とする請求項1から4のいずれかに記載の自動製パン器。
【請求項6】
前記粉砕手段は、粉砕ブレードと前記粉砕ブレードを回転させる粉砕モータとを含み、
前記混練手段は、混練ブレードと前記混練ブレードを回転させる混練モータとを含み、
前記粉砕工程と前記練り工程とのうちの少なくともいずれか一方において、前記制御手段は、モータの負荷を監視し、その負荷に基づいて実行中の工程の終了判断を行うことを特徴とする請求項1から5のいずれかに記載の自動製パン器。
【請求項7】
前記穀物粒用製パンコースには、前記粉砕工程の前に前記パン容器内の穀物粒に液体を吸液させる粉砕前吸液工程が更に含まれることを特徴とする請求項1から6のいずれかに記載の自動製パン器。
【請求項8】
前記穀物粒用製パンコースには、前記粉砕工程の後に前記パン容器内の穀物粒の粉砕粉に液体を吸液させる粉砕後吸液工程が更に含まれることを特徴とする請求項1から7のいずれかに記載の自動製パン器。
【請求項9】
外気温度、前記パン容器の温度、前記パン容器周辺の温度、及び前記パン容器内のパン原料温度のうちの少なくともいずれか1つを検知可能な温度検知手段を更に備え、
前記穀物粒用製パンコースが実行される場合に行われる複数の工程の中に、前記温度検知手段で検知される温度を利用して工程時間を変動させる工程が少なくとも1つ含まれていることを特徴とする請求項1から8のいずれかに記載の自動製パン器。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2011−224165(P2011−224165A)
【公開日】平成23年11月10日(2011.11.10)
【国際特許分類】
【出願番号】特願2010−97083(P2010−97083)
【出願日】平成22年4月20日(2010.4.20)
【出願人】(000001889)三洋電機株式会社 (18,308)
【出願人】(000214892)三洋電機コンシューマエレクトロニクス株式会社 (1,582)
【Fターム(参考)】
【公開日】平成23年11月10日(2011.11.10)
【国際特許分類】
【出願日】平成22年4月20日(2010.4.20)
【出願人】(000001889)三洋電機株式会社 (18,308)
【出願人】(000214892)三洋電機コンシューマエレクトロニクス株式会社 (1,582)
【Fターム(参考)】
[ Back to top ]