
自動製パン器
【課題】穀物粒を出発原料として安全にパンを製造できる自動製パン器を提供する。
【解決手段】自動製パン器1は、パン原料が投入されるパン容器80と、パン容器80を収容する焼成室30が設けられる本体部10と、焼成室30に収容されたパン容器80内の穀物粒を粉砕する粉砕ブレード(図示せず)と、前記粉砕ブレードを駆動する駆動手段(図示せず)と、焼成室30を開閉する蓋部40と、蓋部40の開閉状態を検知する蓋開閉検知手段17と、前記駆動手段の動作を制御する制御手段と、を備える。前記制御手段は、蓋開閉検知手段17によって蓋部40が開状態であると検知した場合には、前記駆動手段の駆動を禁止する。
【解決手段】自動製パン器1は、パン原料が投入されるパン容器80と、パン容器80を収容する焼成室30が設けられる本体部10と、焼成室30に収容されたパン容器80内の穀物粒を粉砕する粉砕ブレード(図示せず)と、前記粉砕ブレードを駆動する駆動手段(図示せず)と、焼成室30を開閉する蓋部40と、蓋部40の開閉状態を検知する蓋開閉検知手段17と、前記駆動手段の動作を制御する制御手段と、を備える。前記制御手段は、蓋開閉検知手段17によって蓋部40が開状態であると検知した場合には、前記駆動手段の駆動を禁止する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、主として一般家庭で使用される自動製パン器に関する。
【背景技術】
【0002】
従来の市販の家庭用自動製パン器では、次のような手順でパンが製造される(例えば、特許文献1参照)。まず、パン原料を入れたパン容器を本体内の焼成室に入れ、パン容器内のパン原料を混練ブレードで混練して生地に練り上げる(練り工程)。その後、得られた生地をパン容器内で発酵させ(発酵工程)、パン容器をそのままパン焼き型として用いてパンを焼き上げる(焼成工程)。
【0003】
このような自動製パン器を用いてパンを製造する場合、小麦や米などの穀物を製粉した粉(小麦粉、米粉等)や、そのような製粉した粉に各種の補助原料を混ぜたミックス粉を入手し、これを製パン原料として用いることによってパンを製造するのが一般的であった。
【0004】
しかしながら、一般家庭においては米粒に代表されるように、粉の形態ではなく粒の形態で穀物を所持していることがある。このために、自動製パン器を用いて穀物粒から直接パンを製造することができれば非常に便利である。このようなことから、本出願人らは、穀物粒を出発原料としてパンを製造する方法を開発している(特許文献2参照)。
【0005】
このパンの製造方法では、まず、穀物粒を液体と混合し、この混合物内で粉砕ブレードを回転して穀物粒を粉砕する(粉砕工程)。そして、粉砕工程を経て得られたペースト状の粉砕粉を含むパン原料を混練ブレードによって生地に練り上げ(練り工程)、生地を発酵(発酵工程)させた後、パンに焼き上げる(焼成工程)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2000−116526号公報
【特許文献2】特開2010−35476号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本出願人らは、家庭で穀物粒を出発原料としてパンを焼き上げられるように、上述のパンの製造方法を自動で実行可能な新しい仕組みを備えた自動製パン器の開発を行っている。この新たな仕組みを備えた自動製パン器として、焼き型として使用されるパン容器を焼成室内に収納した状態で、パン容器内で穀物粒を粉砕することを検討している。そして、液体と混合された穀物粒を所望の粒度まで効率良く粉砕できるように、粉砕ブレードを高速回転する(例えば7000〜8000rpm)モータを自動製パン器に搭載することを検討している。
【0008】
このような構成の場合、粉砕ブレードが高速回転している際に自動製パン器の蓋が開かれると、例えばパン容器内のパン原料が飛散する等、ユーザが危険な目に遭う可能性がある。
【0009】
そこで、本発明の目的は、穀物粒を出発原料として安全にパンを製造できる自動製パン器を提供することである。
【課題を解決するための手段】
【0010】
上記目的を達成するために本発明の自動製パン器は、パン原料が投入されるパン容器と、前記パン容器を収容する焼成室が設けられる本体部と、前記焼成室に収容された前記パン容器内の穀物粒を粉砕する粉砕ブレードと、前記粉砕ブレードを駆動する駆動手段と、前記焼成室を開閉する蓋部と、前記蓋部の開閉状態を検知する蓋開閉検知手段と、前記駆動手段の駆動を制御する制御手段と、を備える自動製パン器であって、前記制御手段は、前記蓋開閉検知手段によって前記蓋部が開状態であると検知した場合には、前記駆動手段の駆動を禁止することを特徴としている。
【0011】
本構成によれば、蓋部が開いた状態では粉砕ブレードが駆動されないようになっている。このために、本構成の自動製パン器では、例えば、粉砕ブレードの高速回転による影響でパン容器内の内容物がパン容器外へと飛散したり、回転体によってユーザが手をケガしたりするのを防止できる。すなわち、本構成の自動製パン器によれば、ユーザは、穀物粒を出発原料として安全にパンを製造することが可能である。
【0012】
上記構成の自動製パン器において、前記蓋開閉検知手段は、前記蓋部と非接触で前記蓋部の開閉状態を検知することとしてもよい。このような構成は、例えば磁気センサや光センサ等を使用することによって実現できる。そして、本構成によれば、例えば蓋部との接触によって蓋部の開閉を検知する機械式の検知手段(具体例としてマイクロスイッチ等が挙げられる)を用いる場合に比べて、その構成を簡素化し易い。
【0013】
上記構成の自動製パン器において、前記蓋開閉検知手段は、磁石と対になって用いられる磁気センサであることとしてもよい。本構成によれば、蓋開閉検知手段を単純な構成とし、安価に設けることが可能である。
【0014】
上記構成の自動製パン器において、前記磁気センサは前記本体部に設けられ、前記磁石は前記蓋部に設けられるのが好ましい。通常、本体部側に自動製パン器の動作を制御する制御装置が配置される。このため、本構成にように磁気センサを本体部側に配置することにより、自動製パン器の構成を簡易なものとし易い。
【0015】
上記構成の自動製パン器において、前記蓋部は、前記本体部の前面側から背面側に向けて回転することによって前記焼成室の開口を開き、前記本体部の背面側から前面側に向けて回転することによって前記焼成室の開口を閉じるように設けられており、前記蓋開閉検知手段は、前記背面寄りに設けられていることとしてもよい。
【0016】
蓋部の開閉状態を検知する蓋開閉検知手段としては、例えばマイクロスイッチのような機械式のセンサや、磁気センサ、光センサ等を用いることが想定できる。このようなセンサを正面側に配置する場合、ユーザの動作によってセンサが誤動作し易くなる場合がある。この点、本構成によれば、蓋部の開閉状態を検知する蓋開閉検知手段が自動製パン器の背面側に設けられているために、上述のような誤動作を生じ難くできる。
【発明の効果】
【0017】
本発明によると、穀物粒を出発原料として安全にパンを製造できる自動製パン器を提供できる。このため、本発明によれば、家庭でのパン製造をより身近なものとして、家庭でのパン作りが盛んになることが期待できる。
【図面の簡単な説明】
【0018】
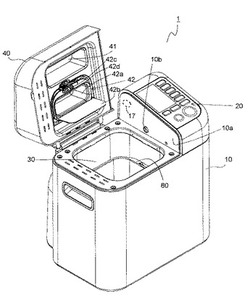
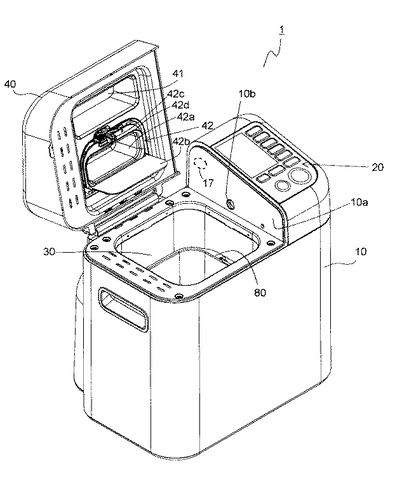
【図1】本実施形態の自動製パン器の外観構成を示す概略斜視図
【図2】本実施形態の自動製パン器の本体内部の構成を説明するための模式図
【図3】本実施形態の自動製パン器が備える第1の動力伝達部に含まれるクラッチについて説明するための図
【図4】本実施形態の自動製パン器における、パン容器が収容された焼成室及びその周辺の構成を模式的に示す図
【図5】本実施形態の自動製パン器が備えるブレードユニットの構成を示す概略斜視図
【図6】本実施形態の自動製パン器が備えるブレードユニットの構成を示す概略分解斜視図
【図7】本実施形態の自動製パン器が備えるブレードユニットの構成を示す概略側面図及び概略断面図
【図8】本実施形態の自動製パン器が備えるブレードユニットを下から見た場合の概略平面図(ガードが取り外された場合の図)
【図9】本実施形態の自動製パン器が備えるブレードユニットの動作を説明するための図で、パン容器を上から見た場合の図
【図10】本実施形態の自動製パン器が備える蓋開閉検知センサの構成を説明するための図
【図11】本実施形態の自動製パン器の構成を示すブロック図
【図12】本実施形態の自動製パン器によって実行される米粒用製パンコースの流れを示す模式図
【発明を実施するための形態】
【0019】
以下、本発明の自動製パン器の実施形態について、図面を参照しながら詳細に説明する。なお、本明細書に登場する具体的な時間や温度等はあくまでも例示であり、本発明の内容を限定するものではない。
(自動製パン器の構成)
図1は、本実施形態の自動製パン器の外観構成を示す概略斜視図である。図1に示すように、自動製パン器1の本体(本体部)10は、操作部20が設けられた上面を有している。本体10の外殻は例えば金属や合成樹脂等によって形成される。操作部20は、スタートキー、取り消しキー、タイマーキー、予約キー、パンの製造コース(米粒を出発原料に用いてパンを製造するコース、米粉を出発原料に用いてパンを製造するコース、小麦粉を出発原料に用いてパンを製造するコース等)を選択する選択キー等の操作キー群と、時間、操作キー群によって設定された内容、エラー等を表示する表示部とによって構成されている。なお、表示部は、例えば液晶表示パネル等によって構成される。
【0020】
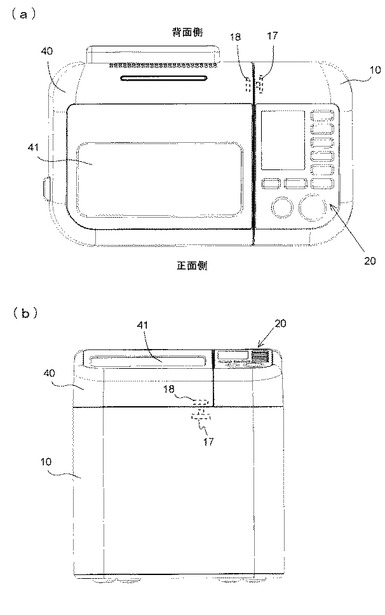
また、本体10には、詳細は後述するパン容器80が収容される焼成室30が設けられている。この焼成室30は、例えば板金からなる底壁30a及び4つの側壁30b(後述の図4も参照)を有する平面形状略矩形の箱形状に構成され、その上面が開口している。この焼成室30は、本体10の背面側に回動可能に一端が軸支されて、焼成室30の開口を覆う閉位置と該閉位置から所定角度回転された開位置との間で変位する蓋(蓋部)40によって開閉可能となっている。換言すると、蓋40は、本体10の正面(前面)側から背面側に向けて回転することによって焼成室30の開口を開き、本体10の背面側から正面(前面)側に向けて回転することによって焼成室30の開口を閉じるように設けられている。なお、図1は、この蓋40が開かれた状態を示している。
【0021】
この蓋40には、焼成室30内を覗けるように、例えば耐熱ガラスからなる覗き窓41が設けられている。また、蓋40には、パンの製造工程の途中で一部のパン原料を自動投入できるように、パン原料収納容器42が取り付けられている。パン原料収納容器42は、平面形状略長方形の箱形状の容器本体42aと、容器本体42aに対して回動可能に設けられて、容器本体42aの開口を開閉する容器蓋42bとを備えている。また、パン原料収納容器42は、容器蓋42bを外面(下面)側から支えて容器本体42aの開口が閉じられた状態を維持できるように設けられると共に、外部からの力によって動かされて容器蓋42bとの係合が解除されるように設けられる可動フック42cも備えている。
【0022】
操作部20下部側の本体10内には図示しない自動投入用ソレノイドが設けられており、このソレノイドが駆動すると、そのプランジャーが、蓋40に隣接する本体壁面10aに設けられる開口10bから突出するようになっている。そして、この突出したプランジャーによって可動する可動部材(図示せず)によって可動フック42cが動かされ、容器蓋42bと可動フック42cとの係合が外れて容器蓋42bが回動し、容器本体42aの開口が開かれた状態となるように構成されている。なお、図1においては、容器本体42aの開口が開かれた状態が示されている。
【0023】
容器本体42a及び容器蓋42bは、容器内に収納される粉体パン原料(例えばグルテンやドライイースト等)が容器内に残留し難いようにアルミニウム等の金属で設けられるのが好ましい。そして、それらの内面は、シリコンやフッ素等のコーティング層で覆われるのが好ましく、更には凹凸がなく滑らかに形成されるのが好ましい。
【0024】
また、米粒(穀物粒の一例)を粉砕する際に発生する蒸気等が容器本体42a内に入り込むと、パン原料が容器内面に付着し易くなって好ましくない。このために、容器内に前述の蒸気等が入り込まないように、容器本体42aの開口側縁には鍔部(フランジ部)が設けられて、この鍔部と容器蓋42bとの間にはパッキン(シール部材)42dが介在するようになっている。
【0025】
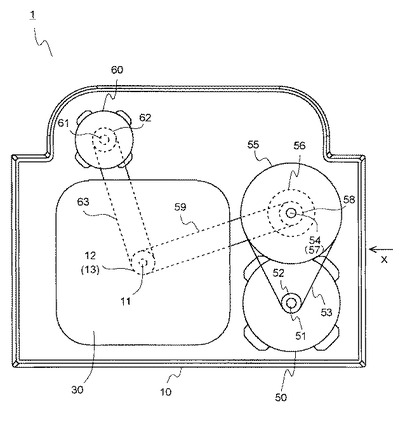
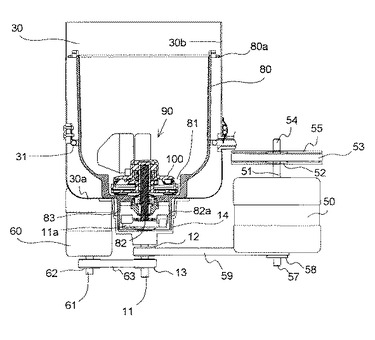
図2は、本実施形態の自動製パン器の本体内部の構成を説明するための模式図である。図2は、自動製パン器1を上側から見た場合を想定しており、図の下側が自動製パン器1の前面側、図の上側が背面側である。図2に示すように、自動製パン器1には、焼成室30の右横に練り工程で用いられる低速・高トルクタイプの混練モータ50が固定配置され、焼成室30の後ろ側に粉砕工程で用いられる高速回転タイプの粉砕モータ60が固定配置されている。混練モータ50及び粉砕モータ60はいずれも竪軸である。なお、粉砕モータ60は、本発明の粉砕ブレードを駆動する駆動手段の実施形態である。
【0026】
混練モータ50の上面から突出する出力軸51には第1のプーリ52が固定される。この第1のプーリ52は、第1のベルト53によって、その径が第1のプーリ52よりも大きく形成されると共に、第1の回転軸54の上部側に固定される第2のプーリ55に連結されている。第1の回転軸54の下部側には、その回転中心が第1の回転軸54とほぼ同一となるように第2の回転軸57が設けられている。なお、第1の回転軸54及び第2の回転軸57は、本体10内部に回転可能に支持されている。また、第1の回転軸54と第2の回転軸57との間には、動力伝達と動力遮断を行うクラッチ56が設けられている。このクラッチ56の構成については後述する。
【0027】
第2の回転軸57の下部側には第3のプーリ58が固定されている。第3のプーリ58は、第2のベルト59によって、焼成室30の下部側に設けられると共に原動軸11に固定される第1の原動軸用プーリ12(第3のプーリ58とほぼ同一の径を有する)に連結されている。混練モータ50自身が低速・高トルクタイプであり、その上、第1のプーリ52の回転が第2のプーリ55によって減速回転される(例えば1/5の速度に減速される)。このため、クラッチ56が動力伝達を行う状態で混練モータ50を駆動すると、原動軸11は低速で回転する。
【0028】
なお、第1のプーリ52、第1のベルト53、第1の回転軸54、第2のプーリ55、クラッチ56、第2の回転軸57、第3のプーリ58、第2のベルト59、及び第1の原動軸用プーリ12で構成される動力伝達部のことを、以下において第1の動力伝達部と表現することがある。
【0029】
粉砕モータ60の下面から突出する出力軸61には、第4のプーリ62が固定されている。この第4のプーリ62は、第3のベルト63によって、原動軸11に固定される第2の原動軸用プーリ13(第1の原動軸用プーリ12より下側で固定される)に連結されている。第2の原動軸用プーリ13は第4のプーリ62とほぼ同一の径を有する。粉砕モータ60には高速回転のものが選定され、第4のプーリ62の回転は第2の原動軸用プーリ13においてほぼ同一速度で維持されるために、粉砕モータ60を駆動すると、原動軸11は高速回転(例えば7000〜8000rpm)を行う。
【0030】
なお、第4のプーリ62、第3のベルト63、及び第2の原動軸用プーリ13で構成される動力伝達部のことを、以下において第2の動力伝達部と表現することがある。第2の動力伝達部は、クラッチを有さない構成であり、粉砕モータ60の出力軸61と原動軸11とを常時動力伝達可能に連結する。
【0031】
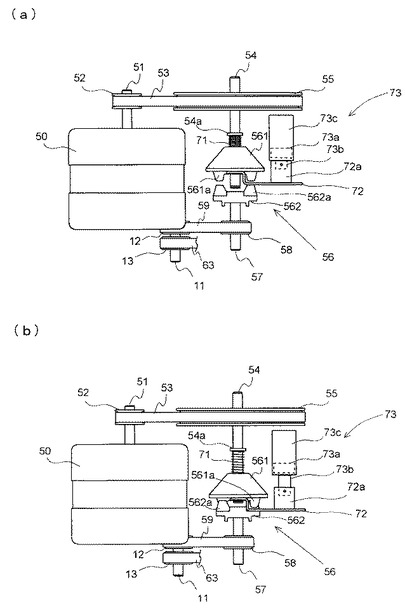
図3は、本実施形態の自動製パン器が備える第1の動力伝達部に含まれるクラッチについて説明するための図である。図3は、図2の矢印X方向に沿って見た場合を想定した図である。なお、図3(a)はクラッチ56が動力遮断を行う状態を示し、図3(b)はクラッチ56が動力伝達を行う状態を示す。
【0032】
図3に示すように、クラッチ56は、第1のクラッチ部材561と第2のクラッチ部材562とを有する。そして、第1のクラッチ部材561に設けられる爪561aと、第2のクラッチ部材562に設けられる爪562aとが噛み合う場合(図3(b)の状態)に動力伝達を行い、2つの爪561a、562bが噛み合わない場合(図3(a)の状態)に動力遮断を行うようになっている。すなわち、クラッチ56は噛み合いクラッチとなっている。
【0033】
なお、本実施形態では、2つのクラッチ部材561、562のそれぞれには、周方向(第1のクラッチ部材561を下から平面視した場合、或いは、第2のクラッチ部材562を上から平面視した場合を想定)にほぼ等間隔に並ぶ6つの爪561a、562aが設けられているが、この爪の数は適宜変更してもよい。また、爪561a、562aの形状は、好ましい形状を適宜選択すればよい。
【0034】
第1のクラッチ部材561は、抜け止め対策を施された上で、第1の回転軸54に、その軸方向(図3において上下方向)に摺動可能であると共に、相対回転不能に取り付けられている。第1の回転軸54の第1のクラッチ部材561の上部側には、バネ71が遊嵌されている。このバネ71は、第1の回転軸54に設けられるストッパ部54aと第1のクラッチ部材561とに挟まれるように配置されており、第1のクラッチ部材561を下側に向けて付勢している。一方、第2のクラッチ部材562は、第2の回転軸57の上端に固定されている。
【0035】
クラッチ56の切り替え(動力伝達状態と、動力遮断状態の切り替え)は、第1のクラッチ部材561から固定状態で延出するアーム部72と、永久磁石73aが内蔵された自己保持型のソレノイド(クラッチ用ソレノイド)73と、を用いて行われる。ソレノイド73のプランジャー73bは、その先端部(図3においては下部側が該当)がアーム部72に設けられる取付部72aに固定された状態となっている。アーム部72(取付部72aを含む)は金属で形成されているために、永久磁石73aに吸着可能となっている。
【0036】
図3(a)の状態から、ソレノイド73に、永久磁石73aの磁界を打ち消すように電圧を印加すると、永久磁石73aのアーム部72(より正確には取付部72a)を吸着する力が低下し、バネ71の付勢力によって第1のクラッチ部材561が下側に押し下げられる。これにより、第1のクラッチ部材561の爪561aと、第2のクラッチ部材562の爪562aとの噛み合いが得られ、クラッチ56は動力伝達を行うようになる(図3(b)の状態となる)。この噛み合いが得られた状態は、バネ71の付勢力によって維持されるために、第1のクラッチ部材561を引き下げるための駆動を行った後は、ソレノイド73はオフとされる。また、この噛み合いが得られた状態では、アーム部72が引き下がるために、ソレノイド73のプランジャー73bは、ハウジング73cからの突出量(下側への突出量)が増した状態となっている。
【0037】
一方、図3(b)の状態から、ソレノイド73に、プランジャー73bを引き上げる方向の電圧(永久磁石73aの磁界を打ち消す方向とは逆方向の電圧)を印加すると、バネ71の付勢力に反して、アーム部72と共に第1のクラッチ部材561が上側に引き上げられる。これにより、第1のクラッチ部材561の爪561aと、第2のクラッチ部材562の爪562aとの噛み合いが解除され、クラッチ56は動力遮断を行うようになる(図3(a)の状態となる)。この噛み合いが解除された状態においては、ソレノイド73に内蔵される永久磁石73aがアーム部72(より正確には取付部72a)を吸着する。このために、第1のクラッチ部材561を引き上げるための駆動を行った後は、ソレノイド73をオフとしても噛み合いが解除された状態を維持できるので、ソレノイド73はオフされる。
【0038】
粉砕モータ60を駆動する際に、クラッチ56が動力伝達を行う状態(図3(b)の状態)であると、原動軸11を高速回転させる回転動力が混練モータ50の出力軸51に伝達される。この場合、粉砕モータ60が例えば8000rpmで回転されるとすると、第1のプーリ52と第2のプーリ55との半径比(例えば1:5)によって、混練モータ50の出力軸51を40000rpmで回転させようとすることになる。この場合、粉砕モータ60に非常に大きな負荷が加わることになるため、粉砕モータ60が破損する可能性がある。このため、粉砕モータ60を駆動する際には、原動軸11を高速回転させる回転動力が混練モータ50の出力軸51に伝達されないようにする必要があり、自動製パン器1は、動力伝達と動力遮断を行うクラッチ56を第1の動力伝達部に含む構成となっている。
【0039】
なお、上述のように自動製パン器1においては、第2の動力伝達部にはクラッチを設けない構成としているが、この場合には上述のようなモータ破損は生じない。これは、混練モータ50を駆動しても原動軸11は低速回転(例えば180rpm等)されるのみであり、原動軸11を回転させる回転動力が粉砕モータ60の出力軸に伝達されても、混練モータ50に大きな負荷が加わることはないからである。そして、このように第2の動力伝達部に敢えてクラッチを設けない構成とすることにより、自動製パン器の製造コストを抑制している。ただし、第2の動力伝達部にクラッチを設ける構成としても勿論構わない。
【0040】
図4は、本実施形態の自動製パン器における、パン容器が収容された焼成室及びその周辺の構成を模式的に示す図である。図4は、自動製パン器1を正面(前面)側から見た場合の構成を想定しており、焼成室30及びパン容器80の構成については概ね断面図で示している。なお、パン原料が投入されるとともにパン焼き型として使用されるパン容器80は、焼成室30に対して出し入れ自在となっている。
【0041】
図4に示すように、焼成室30の内部にはシーズヒータ31(加熱手段の一例)が、焼成室30に収容されたパン容器80を包囲するように配置され、パン容器80内のパン原料(この表現にはパン生地も含まれる)を加熱できるようになっている。
【0042】
また、焼成室30の底壁30aの略中心にあたる箇所には、パン容器80を支持するパン容器支持部14(例えばアルミニウム合金のダイキャスト成型品からなる)が固定されている。このパン容器支持部14は、焼成室30の底壁30aから窪むように形成され、その窪みは上から見た場合に略円形となっている。このパン容器支持部14の中心には、上述の原動軸11が底壁30aに対して略垂直となるように支持されている。
【0043】
パン容器80は例えばアルミニウム合金のダイキャスト成型品(その他、板金等で構成しても構わない)であり、バケツのような形状をしており、開口部側縁に設けられる鍔部80aに手提げ用のハンドル(図示せず)が取り付けられている。パン容器80の水平断面は四隅を丸めた矩形である。また、パン容器80の底部には、詳細は後述するブレードユニット90の一部を収容する平面視略円形状の凹部81が形成されている。
【0044】
パン容器80の底部中心には、垂直方向に延びるブレード回転軸82が、シール対策が施された状態で回転可能に支持されている。このブレード回転軸82の下端(パン容器80の底部から突き出ている)には容器側カップリング部材82aが固定されている。また、パン容器80の底部外面側には、容器側カップリング部材82aを取り囲むように筒状の台座83が設けられており、パン容器80は、この台座83がパン容器支持部14に受け入れられた状態で、焼成室30内に収容されるようになっている。なお、台座83は、パン容器80とは別に形成してもよいし、パン容器80と一体的に形成してもよい。
【0045】
パン容器支持部14の内周面と台座83の外周面とには、それぞれ図示しない突起が形成されており、これらの突起は周知のバヨネット結合を構成する。すなわち、パン容器80をパン容器支持部14に取り付ける際、台座83の突起がパン容器支持部14の突起に干渉しないようにしてパン容器80を下ろす。そして、台座83がパン容器支持部14に嵌り込んだ後、パン容器80を水平にひねると、パン容器支持部14の突起の下面に台座83の突起が係合するようになっている。これにより、パン容器80は上方に抜けなくなる。
【0046】
なお、この操作で、ブレード回転軸82の下端に設けられる前述の容器側カップリング部材82aと、原動軸11の上端に固定される原動軸側カップリング部材11aとの連結(カップリング)も同時に達成される。そして、このカップリングにより、ブレード回転軸82は原動軸11から回転動力が伝えられるようになる。
【0047】
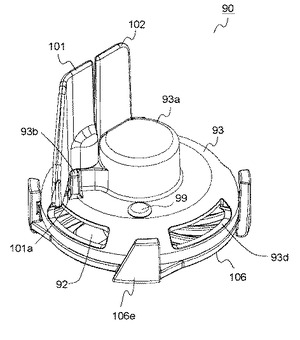
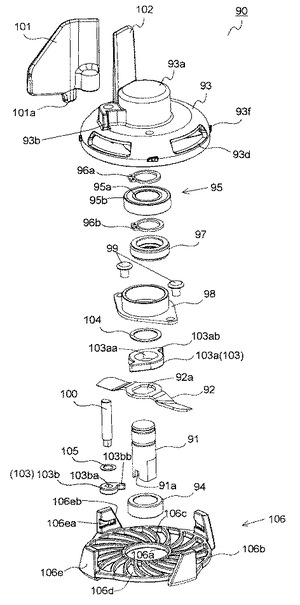
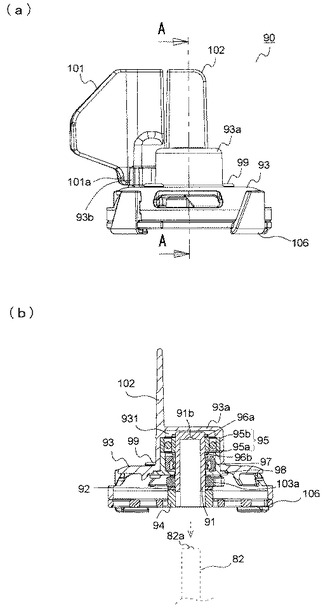
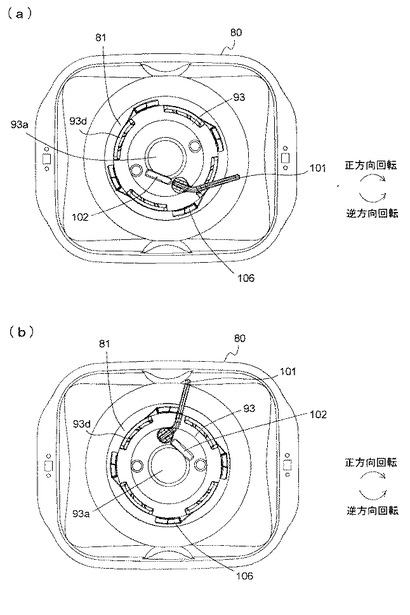
ブレード回転軸82のパン容器80内部に突出する部分には、その上からブレードユニット90が着脱可能に取り付けられるようになっている。このブレードユニット90の構成について、図5から図9を参照しながら説明する。なお、図5は、本実施形態の自動製パン器が備えるブレードユニットの構成を示す概略斜視図である。図6は、本実施形態の自動製パン器が備えるブレードユニットの構成を示す概略分解斜視図である。図7は、本実施形態の自動製パン器が備えるブレードユニットの構成を示す図で、図7(a)は概略側面図、図7(b)は図7(a)のA−A位置における断面図である。図8は、本実施形態の自動製パン器が備えるブレードユニットを下から見た場合の概略平面図で、図8(a)は混練ブレードが折り畳み姿勢にある場合の図、図8(b)は混練ブレードが開き姿勢にある場合の図である。図8においては、後述のガードが取り外された状態を示している。図9は、本実施形態の自動製パン器が備えるブレードユニットの動作を説明するための図で、パン容器を上から見た場合の図である。図9(a)は混練ブレードが折り畳み姿勢にある場合の図、図9(b)は混練ブレードが開き姿勢にある場合の図である。
【0048】
ブレードユニット90は、大きくは、ユニット用シャフト91と、ユニット用シャフト91に相対回転不能且つ着脱可能に取り付けられる粉砕ブレード92と、ユニット用シャフト91に相対回転可能且つ粉砕ブレード92を覆うように取り付けられる平面視略円形のドーム状カバー93と、を備える構成となっている(例えば、図5〜図7参照)。ブレードユニット90をブレード回転軸82に取り付けた状態において、粉砕ブレード92は、パン容器80の凹部81底面より少し上の箇所に位置する。また、粉砕ブレード90及びドーム状カバー93のほぼ全体は凹部81に収容される。
【0049】
ユニット用シャフト91は、例えばステンレス鋼板等の金属によって形成される略円柱状の部材であり、一方端(図6及び図7の下端)に開口が設けられ、その内部は中空となっている。また、ユニット用シャフト91の下部側には、ユニット用シャフト91を直径方向に横断する溝91aが形成されている(例えば図6参照)。ユニット用シャフト91をブレード回転軸82の上から嵌め込んだ(被せた)場合に、ブレード回転軸82を水平に貫くピン(図示せず)が溝91aに係合し、ユニット用シャフト91をブレード回転軸82に相対回転不能に連結する。
【0050】
なお、図7(b)に示すように、ブレード回転軸82(破線で示す)の上面(略円形状)の中央部に設けられる凸部82aと係合するように、ユニット用シャフト91の上部側内面の中央部には凹部91bが形成されている。これにより、ユニット用シャフト91とブレード回転軸82との中心を合わせた状態で、ブレードユニット90をブレード回転軸82に容易に取り付けることができ、ブレードを回転する際に不要なガタツキ等が発生することを抑制できる。本実施形態では、ブレード回転軸82側に凸部82a、ユニット用シャフト91側に凹部91bを設ける構成としたが、これとは逆に、ブレード回転軸82側に凹部、ユニット用シャフト91側に凸部を設ける構成としても構わない。
【0051】
米粒粉砕用の粉砕ブレード92は例えばステンレス鋼板によって形成され、その形状は例えば飛行機のプロペラのようになっている。粉砕ブレード92の中心部には、図6に示すように、平面視略矩形状の開口92aが形成されている。粉砕ブレード92は、ユニット用シャフト91の下部側から、開口92aにユニット用シャフト91を嵌め込むようにして取り付けられている。
【0052】
ユニット用シャフト91の下部側は、円柱の側面を削ったような形状となっており、下から見た場合に、粉砕ブレード92の開口92aとほぼ同形状(略矩形状)となっている。また、この略矩形状部分(ユニット用シャフト91の下部側部分)のサイズは、粉砕ブレード92の開口92aより、ほんの僅かだけ小さくなっている。このような形状を採用しているために、粉砕ブレード92はユニット用シャフト91に相対回転不能に取り付けられる。ユニット用シャフト91の粉砕ブレード92より下側部分には抜け止め用のストッパ部材94が嵌め込まれるために、粉砕ブレード92がユニット用シャフト91から脱落することはない。
【0053】
粉砕ブレード91を囲んで覆い隠すように配置されるドーム状カバー93は、例えばアルミニウム合金のダイキャスト成型品からなり、その内面側には、ベアリング95(本実施形態では転がり軸受けを使用)を収容する凹状の収容部931(図7(b)参照)が形成されている。換言すると、この収容部931を形成するために、ドーム状カバー93は、それを外面から見た場合に、中央部に略円柱状の凸部93aが形成された構成となっている。なお、凸部93aの外面には開口が形成されておらず、収容部931に収容されるベアリング95はその側面及び上面が収容部931の壁面に囲い込まれた状態となっている。
【0054】
ベアリング95は上下に抜け止めリング96a、96bが配置された状態で、その内輪95aがユニット用シャフト91に相対回転不能に取り付けられている(内輪95a内側の貫通孔にユニット用シャフト91が圧入されている)。また、ベアリング95は、その外輪95bが収容部931の側壁に固定されるように、収容部931に圧入されている。このベアリング95(内輪95aが外輪95bに対して相対回転する)の介在によって、ドーム状カバー93はユニット用シャフト91に相対回転可能に取り付けられている。
【0055】
また、ドーム状カバー93の収容部931には、外部からベアリング95内に異物(例えば米粒の粉砕時に用いられる液体や粉砕により得られたペースト状物等)が入り込まないように、例えばシリコン系或いはフッ素系の材料によって形成されるシール材97及び、このシール材97を保持する金属製のシールカバー98が、ベアリング95の下部側から圧入されている。シールカバー98は、ドーム状カバー93への固定が確実となるように、リベット99によってドーム状カバー93に固着されている。このリベット99による固定は行わなくてもよいが、確実な固定を得るために、本実施形態のように構成するのが好ましい。
【0056】
ドーム状カバー93の外面には、凸部93aに隣接する箇所に垂直方向に延びるように配置された支軸100(図6参照)により、平面形状「く」の字形の混練ブレード101(例えばアルミニウム合金のダイキャスト成型品からなる)が取り付けられている。混練ブレード101は、支軸100に相対回転不能に取り付けられており、ドーム状カバー93に相対回転可能に取り付けられる支軸100と動きを共にする。
【0057】
また、本実施形態では、ドーム状カバー93の外面に、混練ブレード101に並ぶように補完混練ブレード102(例えばアルミニウム合金のダイキャスト成型品からなる)が固定配置されている。この補完混練ブレード102は、必ずしも設ける必要がないが、パン生地を練り上げる練り工程における混練効率を高めるために設けるのが好ましい。
【0058】
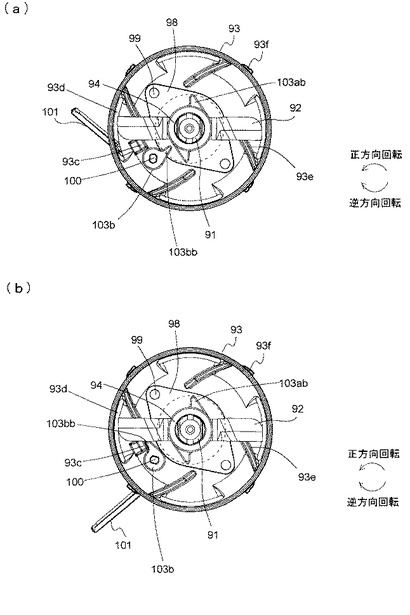
ここで、混練ブレード101の動作について説明する。混練ブレード101は、支軸100と共に支軸100の軸線周りに回転し、図5、図7、図8(a)及び図9(a)に示す折り畳み姿勢と、図8(b)及び図9(b)に示す開き姿勢との2姿勢をとる。折り畳み姿勢では、混練ブレード101の下縁から垂下した突起101a(図5及び図6参照)がドーム状カバー93の上面に設けられた第1のストッパ部93bに当接し、混練ブレード101はそれ以上ドーム状カバー93に対し反時計方向(上から見た場合を想定)の回動を行うことができない。この折り畳み姿勢では、混練ブレード101の先端がドーム状カバー93から少し突き出している。
【0059】
この姿勢(図9(a)の状態)から混練ブレード101がドーム状カバー93に対して時計方向(上から見た場合を想定)に回動して図9(b)に示す開き姿勢になると、混練ブレード101の先端はドーム状カバー93から大きく突き出す。この開き姿勢における混練ブレード101の開き角度は、ドーム状カバー93の内面に設けられる第2のストッパ部93c(図8参照)によって制限される。詳細は後述する第2係合体103b(支軸100に固定される)が第2のストッパ部93cに当って回転できなくなった時点で、混練ブレード101は最大開き角度となる。
【0060】
なお、混練ブレード101が折り畳み姿勢となっている場合には、例えば図5や図7に示すように補完混練ブレード102は混練ブレード101に整列し、あたかも「く」の字形状の混練ブレード101のサイズが大型化したようになる。
【0061】
ところで、ユニット用シャフト91には、図6に示すように、粉砕ブレード92とシールカバー98との間にカバー用クラッチ103を構成する第1係合体103aが取り付けられている。例えば亜鉛ダイカストからなる第1係合体103aには略矩形状の開口103aaが形成されており、この開口103aaにユニット用シャフト91の下部側の平面視略矩形状部分が嵌め込まれることにより、第1係合体103aはユニット用シャフト91に相対回転不能に取り付けられている。この第1係合体103aは粉砕ブレード92よりも先に、ユニット用シャフト91の下側から嵌め込まれ、ストッパ部材94によって、粉砕ブレード92と共にユニット用シャフト91からの脱落が防止されている。なお、本実施形態では、第1係合体103aとシールカバー93との間には、第1係合体103aの劣化防止等を考慮してワッシャ104を配置する構成としているが、このワッシャ104は必ずしも設けなくてもよい。
【0062】
また、混練ブレード101が取り付けられる支軸100の下部側には、カバー用クラッチ103を構成する第2係合体103bが取り付けられている。例えば亜鉛ダイカストからなる第2係合体103bには略矩形状の開口103baが形成されており、この開口103baに支軸100の下部側の平面視略矩形状部分が嵌め込まれることにより、第2係合体103bは支軸100に相対回転不能に取り付けられている。なお、本実施形態では、第2係合体103bの上側に、第2係合体103bの劣化防止等を考慮してワッシャ105を配置する構成としているが、このワッシャ105は必ずしも設けなくてもよい。
【0063】
第1係合体103aと第2係合体103bとで構成されるカバー用クラッチ103は、ブレード回転軸82の回転動力をドーム状カバー93に伝達するか否かを切り替えるクラッチとして機能する。カバー用クラッチ103は、混練モータ50が原動軸11を回転させるときのブレード回転軸82の回転方向(この回転方向を「正方向回転」とする。図8では反時計方向回転、図9では時計方向回転となる。)において、ブレード回転軸82とドーム状カバー93を連結する。逆に、粉砕モータ60が原動軸11を回転させるときのブレード回転軸82の回転方向(この回転方向を「逆方向回転」とする。図8では時計方向回転、図9では反時計方向回転となる。)では、カバー用クラッチ103はブレード回転軸82とドーム状カバー93の連結を切り離す。以下、このカバー用クラッチ103の動作について更に詳細に説明する。
【0064】
混練ブレード101が折り畳み姿勢にある場合(例えば図8(a)、図9(a)の状態)、第2係合体103bの係合部103bbは第1係合体103aの係合部103ab(本実施形態では2つあるが1つでもよい)の回転軌道に干渉する角度となる(図8(a)の破線参照)。このため、ブレード回転軸82が正方向回転すると、第1係合体103aと第2係合体103bは係合し、ブレード回転軸82の回転動力がドーム状カバー93に伝達される。
【0065】
一方、混練ブレード101が開き姿勢にある場合(例えば図8(b)、図9(b)の状態)、第2係合体103bの係合部103bbは第1係合体103aの係合部103abの回転軌道から逸脱した角度となる(図8(b)の破線参照)。このために、ブレード回転軸82が回転しても、第1係合体103aと第2係合体103bは係合しない。従って、ブレード回転軸82の回転動力はドーム状カバー93に伝達されない。
【0066】
例えば図5及び図6に示すように、ドーム状カバー93には、カバー内空間とカバー外空間を連通する窓93dが形成される。窓93dは粉砕ブレード92に並ぶ高さか、それよりも上の位置に配置される。なお、本実施形態では、計4個の窓93dが90°間隔で並んでいるが、それ以外の数と配置間隔を選択することもできる。
【0067】
また、ドーム状カバー93内面には、各窓93dに対応して計4個のリブ93eが形成されている。各リブ93eはドーム状カバー93の中心近傍から外周の環状壁まで半径方向に斜めに延び、4個合わさって一種の巴形状を構成する。また、各リブ93eは、それに向かって押し寄せるパン原料に対面する側が凸となるように湾曲している。
【0068】
また、ドーム状カバー93の下面には、着脱可能なガード106が取り付けられている。このガード106は、ドーム状カバー93の下面を覆って粉砕ブレード92にユーザの指が接近するのを阻止する。ガード106は、例えば耐熱性を有するエンジニアリングプラスチックによって形成され、例えばPPS(ポリフェニレンサルファイド)等の成型品とできる。なお、このガード106は設けなくても構わないが、ユーザが安心して使用できるように設けるのが好ましい。
【0069】
例えば図6に示すように、ガード106の中心には、ユニット用シャフト91に固定されるストッパ部材94を通すリング状のハブ106aがある。また、ガード106の周縁にはリング状のリム106bがある。ハブ106aとリム106bとは複数のスポーク106cで連結される。スポーク106c同士の間は、粉砕ブレード92によって粉砕される米粒を通す開口部106dとなる。開口部106dは、指が通り抜けられない程度の大きさとなっている。
【0070】
ガード106は、ドーム状カバー93に取り付けられた時、粉砕ブレード92と近接状態となる。そして、あたかも、ガード106が回転式電気かみそりの外刃で、粉砕ブレード92が内刃のような形になる。
【0071】
リム106bの周縁には、90°間隔で計4個(この構成に限定されないのは言うまでもない)の柱106eが一体成形されている。この柱106eのガード106中心側を向いた側面には、一端が行き止まりになった水平な溝106eaが形成される。この溝106eaにドーム状カバー93の外周に形成される突起93f(実施形態では、45°間隔で計8個配置されている)を係合することによって、ガード106はドーム状カバー106に取り付けられる。なお、溝106eaと突起93fはバヨネット結合を構成するように設けられている。
【0072】
自動製パン器1では、粉砕ブレード92及び混練ブレード101を1つのユニット(ブレードユニット90)内に設ける構成としているので、その取り扱いが便利である。ユーザは、ブレードユニット90をブレード回転軸82から簡単に引き抜くことが可能であり、製パン作業終了後にブレードの洗浄を手軽に行うことができる。また、ブレードユニット90が備える粉砕ブレード92は、ユニット用シャフト91に着脱可能に取り付けられるものであり、その量産が行いやすく、ブレード交換等のメンテナンス性にも優れる。
【0073】
また、本実施形態の自動製パン器1では、パン容器80に水等の液体が入れられるために、ユニット用シャフト91に対してドーム状カバー93を相対回転可能とするベアリング95に液体が入り込まないように、ベアリング95は密閉する必要がある。この点、自動製パン器1では、ベアリング95がドーム状カバー93に設けられる凹状の収容部931に収容されているために、ドーム状カバーの内面側にのみシール手段(シール材97及びシールカバー98)を設ければベアリング95を密閉できる。このため、ベアリング95の上下にシール手段を設ける必要がなく、ベアリング95のシール構造の小型化が図れる。このため、自動製パン器1では、焼き上がったパンの形状に対する悪影響(例えば、パンの底面が大きく凹む等)を抑制することが可能になる。
【0074】
ところで、本実施形態の自動製パン器1においては、米粒(穀物粒の一例)を粉砕する際に、粉砕モータ60によって粉砕ブレード92を高速回転する構成となっている。このような構成では、粉砕ブレード92の回転中にユーザが自動製パン器1の蓋40を開けると、例えばパン容器80内のパン原料が飛散したり、パン容器80内の回転体によってユーザが手をケガしたりする等、ユーザに危険が及ぶ可能性がある。このため、自動製パン器1においては、蓋40の開閉状態を検知する蓋開閉検知センサを設けて、蓋40が開いた状態では、粉砕モータ60の駆動(回転)が行われないようになっている。以下、自動製パン器1が備える蓋開閉検知センサの構成について説明する。
【0075】
図10は、本実施形態の自動製パン器が備える蓋開閉検知センサの構成を説明するための図で、図10(a)は第1構成例の図で、図10(b)は第2構成例の図である。
【0076】
まず、自動製パン器1を上から見た状態を示す図10(a)を参照しながら、第1構成例の蓋開閉検知センサについて説明する。図10(a)に示すように、本体10の操作部20が設けられる側の上部背面寄りであって蓋40に対向する側面近傍には、磁気センサ17が設けられている。この磁気センサ17は、本発明の蓋開閉検知センサの実施形態である。磁気センサ17は、詳細には本体10の内部に固定配置されており、外部からは見えない。このために、図10(a)では磁気センサ17を破線で示している。
【0077】
また、蓋40には、蓋40が閉じられた状態において、本体10に配置される磁気センサ17と対向配置される永久磁石18が固定配置されている。この永久磁石18は、例えば蓋40の外側面に凹部を設けて、その凹部に固定配置する構成としてもよいし、また、蓋40の内部に固定配置するようにしても構わない。本実施形態では、蓋40を上から見た場合に永久磁石18は見えないために、図10(a)では永久磁石18を破線で示している。
【0078】
蓋40を開いた状態とするために、蓋40が閉じられた状態(ここでは、蓋40の下面と本体10が当接した状態を想定している)から背面側に向かって蓋40を回転すると、永久磁石18が磁気センサ17から離れる方向に移動する(図1参照)。このために、蓋40が開かれると磁気センサ17によって検知される磁力の大きさが変化する。すなわち、磁気センサ17によって蓋40の開閉状態を検知することが可能となる。
【0079】
本実施形態の自動製パン器1では、蓋開閉検知センサとして機能する磁気センサ17は、永久磁石18と対になって蓋40の開閉を検知できる構成となっている。永久磁石18の磁力は、磁気センサ17で蓋40の開閉動作に伴う磁力の変化を確実に検知できるように、適宜決定すればよい。
【0080】
なお、本実施形態では、蓋40が閉じられた状態において、磁気センサ17及び永久磁石18が自動製パン器1の背面寄りに位置する構成としているが、この構成に限定される趣旨ではない。例えば、蓋40が閉じられた状態において、磁気センサ17及び永久磁石18が自動製パン器1の正面(前面)寄りに位置するような構成としても構わない。
【0081】
磁気センサ17及び永久磁石18が自動製パン器1の正面寄りに位置するような構成としては、図10(a)のように配置される磁気センサ17及び永久磁石18を正面側にスライド移動させたような構成でも構わないし、図10(b)に示す第2構成例のようにしてもよい。図10(b)は自動製パン器1を正面から見た状態を示している。第2構成例では、磁気センサ17は、本体10正面側壁の裏面側であって蓋40と当接する当接面近傍の操作部20寄りの位置(本体内部)に設けられている。また、永久磁石18は蓋40の正面寄りの内部に設けられ、蓋40を閉じた状態において、磁気センサ17と対向配置するように設けられている。この場合も、磁気センサ17で蓋40の開閉動作に伴う磁力の変化を検知できる。図10(b)においても、外部から磁気センサ17及び永久磁石18が見えないために、これらは破線で示している。
【0082】
なお、磁気センサ17及び永久磁石18は、第1構成例のように自動製パン器1の背面寄りに配置した方が好ましいと考えられる。ユーザは通常正面側に位置して自動製パン器1の操作等を行う。正面側に磁気センサ17を配置すると、例えばユーザが磁力の発生源を有しているような場合に、ユーザが自動製パン器1の操作等を行っている際に、本来の状態に反して蓋40が閉じられていると誤検知する可能性が高まると考えられるからである。
【0083】
また、図10に示す第1構成例及び第2構成例では、磁気センサ17を本体10側、永久磁石18を蓋40側に設ける構成としているが、この逆の構成(磁気センサ17を蓋40側、永久磁石18を本体18側とする構成)としても構わない。ただし、自動製パン器1の制御装置は本体10側に配置されるのが通常であり、前者の方が、構成が複雑となり難い。
【0084】
また、本実施形態では、蓋40の開閉状態を検知する蓋開閉検知センサとして、磁石と対になって用いられる磁気センサを用いる構成とした。しかし、蓋開閉検知センサの構成は、本実施形態の構成に限定されるものではない。すなわち、例えば、発光部と受光部とを備えるフォトインタラプタ(いわゆる透過型でも反射型でもよい)のような光センサ、金属センサ(蓋40が金属で構成されている場合には金属センサで蓋の開閉検知可能)、マイクロスイッチ等の機械式センサ等を蓋開閉検知センサとして用いてもよい。
【0085】
磁気センサ、光センサ、金属センサ等は、蓋40と非接触で蓋40の開閉状態を検知できるために、機械式センサに比べて蓋40の開閉状態を検知する構成を単純な構成としやすい。また、蓋40と非接触で蓋40の開閉状態を検知できる構成のうち、本実施形態に示す磁気センサ17を用いる構成は安価とし易い点で好ましい。
【0086】
また、マイクロスイッチを用いる場合には、通常は図10(b)に示す磁気センサ17と同様に、本体10正面側に配置することが想定される。マイクロスイッチを用いる場合には、蓋40との接触部を確保するために、その一部を外部に露出させる必要があるが、この部分にはパン原料として用いられる水が掛かり易い(水をこぼしてしまう等が想定される)といった問題がある。マイクロスイッチに水が掛かると故障するために、マイクロスイッチを蓋開閉検知センサとして用いる場合には、シール対策を施すのが好ましい。この点、本実施形態のように磁気センサ17を用いる場合には、磁石18も含めて蓋開閉検知センサを構成する部材を外部に露出しないように構成できるために、水がかかって故障するといった心配がない。
【0087】
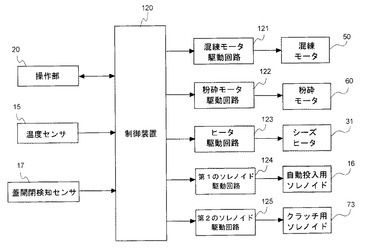
図11は、本実施形態の自動製パン器の構成を示すブロック図である。図11に示すように、自動製パン器1における制御動作は制御装置120によって行われる。制御装置120は、例えば、CPU(Central Processing Unit)、ROM(Read Only Memory)、RAM(Random Access Memory)、I/O(input/output)回路部等からなるマイクロコンピュータ(マイコン)によって構成される。この制御装置120は、焼成室30の熱の影響を受け難い位置に配置するのが好ましい。また、制御装置120には、時間計測機能が備えられており、パンの製造工程における時間的な制御が可能となっている。
【0088】
制御装置120には、上述の操作部20と、焼成室30の温度を検知する温度センサ15と、上述の蓋開閉検知センサ(磁気センサ)17と、混練モータ駆動回路121と、粉砕モータ駆動回路122と、ヒータ駆動回路123と、第1のソレノイド駆動回路124と、第2のソレノイド駆動回路125と、が電気的に接続されている。
【0089】
混練モータ駆動回路121は、制御装置120からの指令の下で混練モータ50の駆動を制御するための回路である。また、粉砕モータ駆動回路122は、制御装置120からの指令の下で粉砕モータ60の駆動を制御するための回路である。ヒータ駆動回路123は、制御装置120からの指令の下でシーズヒータ31の動作を制御するための回路である。第1のソレノイド駆動回路124は、制御装置120からの指令の下で、パンの製造工程の途中で一部のパン原料を自動投入する際に駆動する自動投入用ソレノイド16の駆動を制御するための回路である。第2のソレノイド駆動回路125は、制御装置120からの指令の下でクラッチ56(図3参照)の状態を切り替えるクラッチ用ソレノイド73(図3参照)の駆動を制御するための回路である。
【0090】
制御装置120は、操作部20からの入力信号に基づいてROM等に格納されたパンの製造コース(製パンコース)に係るプログラムを読み出し、各駆動回路121〜125を介して各部を制御しながら、自動製パン器1にパンの製造工程を実行させる。また、制御装置120は、蓋開閉検知センサ17によって蓋40が開いた状態(開状態)であると検知した場合には、粉砕モータ60が回転(動作)中であれば粉砕モータ60の回転を停止させ、粉砕モータ60が回転していない状態であれば粉砕モータ60が回転開始しないように制御する。
【0091】
蓋40が開状態であるか、閉状態であるかの判断は、例えば、予め制御装置120のROM等に磁力に関する閾値を記憶させておくことで実現できる。すなわち、磁気センサ17によって検知される磁力が予め記憶させておいた閾値よりも小さくなった時点で蓋40が開いていると判断し、磁気センサ17によって検知される磁力が閾値以上となった時点で蓋40が閉じていると判断するようにすることができる。
【0092】
なお、蓋40の下面が本体10と当接した状態から、蓋40が背面側に向かってどの程度回動した位置を蓋40が開いた状態とするかは、ユーザの安全性等を考慮して適宜決定すればよい。例えば、蓋40の下面と本体10との接触がなくなった瞬間の位置を蓋40が開いた状態としてもよいし、前述の接触がなくなった瞬間の位置より、もう少し蓋40が背面側に向かって回転した位置を蓋40が開いた状態としてもよい。
(自動製パン器の動作)
次に、以上のように構成される自動製パン器1によってパンを製造する場合の自動製パン器1の動作について説明する。ここでは、自動製パン器1によって、米粒を出発原料に用いてパンを製造する場合を例に自動製パン器1の動作を説明する。
【0093】
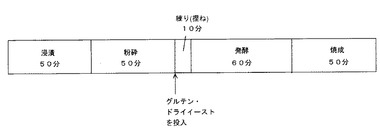
米粒を出発原料に用いる場合には、米粒用製パンコースが実行される。図12は自動製パン器によって実行される米粒用製パンコースの流れを示す模式図である。図11に示すように、米粒用製パンコースにおいては、浸漬工程と、粉砕工程と、練り(捏ね)工程と、発酵工程と、焼成工程と、がこの順番で順次に実行される。
【0094】
米粒用製パンコースを開始するにあたって、ユーザは、パン容器80のブレード回転軸82にユニット用シャフト91を被せることによって、ブレードユニット90をブレード回転軸82に取り付ける。この作業は蓋40が開いた状態で行われる。自動製パン器1においては、上述のように蓋開閉検知センサ17によって蓋40が開いた状態を検知し、蓋40が開いた状態では粉砕モータ60の駆動が開始しないようになっている(粉砕モータ60の駆動が禁止されている)。このため、この作業中に粉砕モータ60が回転開始することがなく、ユーザは安全にブレードユニット90を取り付けられる。
【0095】
また、ユーザは、米粒、水、調味料(例えば食塩、砂糖、ショートニング等)をそれぞれ所定量ずつ計量してパン容器80に入れる。また、ユーザは、パンの製造工程の途中で自動投入されるパン原料を計量してパン原料収納容器42の容器本体42aに入れる。そして、収納すべきパン原料を容器本体42aに収納したら、可動フック42cによって容器蓋42aを支えることにより、容器蓋42bによって容器本体42aの開口が閉じられた状態とする。
【0096】
なお、パン原料収納容器42に収納されるパン原料としては、例えば、グルテン、ドライイースト等が挙げられる。ただし、グルテンの代わりに、例えば小麦粉、増粘剤(グアガム等)及び上新粉のうちの少なくとも1つをパン原料収納容器42に収納するようにしてもよい。また、グルテン、小麦粉、増粘剤、上新粉等は用いずに、例えばドライイーストのみをパン原料収納容器42に収納するようにしてもよい。更に、場合によっては、例えば食塩、砂糖、ショートニングといった調味料についてもパンの製造工程の途中で自動投入すべく、例えばグルテン、ドライイーストと共にパン原料収納容器42に収納するようにしてもよい。この場合には、パン容器80に予め投入しておくパン原料は米粒及び水(単なる水の代わりに、例えばだし汁のような味成分を有する液体、果汁やアルコールを含有する液体等でもよい)となる。
【0097】
この後、ユーザは、パン容器80を焼成室30に入れ、更に、パン原料収納容器42を蓋40の所定位置に取り付ける。そして、ユーザは蓋40を閉じ、操作部20によって米粒用製パンコースを選択し、スタートキーを押す。これにより、制御装置120によって米粒を出発原料に用いてパンを製造する米粒用製パンコースが開始される。
【0098】
米粒用製パンコースがスタートされると、制御装置120の指令によって浸漬工程が開始される。浸漬工程では、パン容器80に予め投入されたパン原料が静置状態とされ、この静置状態が予め定められた所定時間(本実施形態では50分)維持される。この浸漬工程は、米粒に水を含ませることによって、その後に行われる粉砕工程において、米粒を芯まで粉砕しやすくすることを狙う工程である。
【0099】
なお、米粒の吸水速度は水の温度によって変動し、水温が高いと吸水速度が高まり、水温が低いと吸水速度が低下する。このために、浸漬工程の時間は、例えば自動製パン器1が使用される環境温度等によって変動させるようにしてもよい。これにより、米粒の吸水度合いのばらつきを抑制できる。また、浸漬時間を短時間とするために、浸漬工程時にシーズヒータ31に通電して焼成室30の温度を高めるようにしてもよい。
【0100】
また、浸漬工程においては、その初期段階で粉砕ブレード92を回転させ、その後も断続的に粉砕ブレード92を回転させるようにしてもよい。このようにすると、米粒の表面に傷をつけることができ、米粒の吸液効率を高められる。
【0101】
上記所定時間が経過すると、制御装置120の指令によって、浸漬工程が終了され、米粒を粉砕する粉砕工程が開始される。この粉砕工程では、米粒と水とが含まれる混合物の中で粉砕ブレード92が高速回転される。具体的には、制御装置120は、粉砕モータ60を制御してブレード回転軸82を逆方向回転させ、米粒と水とが含まれる混合物の中で粉砕ブレード92の高速回転を実行させる。
【0102】
なお、粉砕モータ60を用いて粉砕ブレード92を回転させる場合、制御装置120は、クラッチ用ソレノイド73を駆動させて、クラッチ56が動力遮断を行うようにする(図3(a)の状態とする)。上述したように、このように制御しないとモータ破損の可能性があるからである。
【0103】
粉砕ブレード92を回転させるために、ブレード回転軸82が逆方向回転された場合、ドーム状カバー93もブレード回転軸82の回転に追随して回転を開始するが、次のような動作によってドーム状カバー93の回転はすぐに阻止される。粉砕ブレード92を回転させるためのブレード回転軸82の回転に伴うドーム状カバー93の回転方向は、図9において反時計方向であり、混練ブレード101は、それまで折り畳み姿勢(図9(a)に示す姿勢)であった場合には、米粒と水が含まれる混合物から受ける抵抗で開き姿勢(図9(b)に示す姿勢)に転じる。混練ブレード101が開き姿勢になると、カバー用クラッチ103は、第2係合体103bの係合部103bbが第1係合体103aの係合部103abの回転軌道(図8の破線参照)から逸脱するために、ブレード回転軸82とドーム状カバー93の連結を切り離す。同時に、開き姿勢になった混練ブレード101は図9(b)に示すように、パン容器80の内側壁に当るために、ドーム状カバー93の回転は阻止される。
【0104】
粉砕工程における米粒の粉砕は、先に行われた浸漬工程によって米粒に水が浸み込んだ状態で実行されるために、米粒を芯まで容易に粉砕することができる。粉砕工程における粉砕ブレード92の回転は本実施形態では間欠回転とされる。この間欠回転は、例えば30秒回転して5分間停止するというサイクルで行われ、このサイクルが10回繰り返される。なお、最後のサイクルでは、5分間の停止は行わない。粉砕ブレード92の回転は連続回転としてもよいが、例えばパン容器80内の原料温度が高くなり過ぎることを防止する等の目的のために、間欠回転とするのが好ましい。
【0105】
粉砕工程においては、粉砕がドーム状カバー93内で行われるから、米粒がパン容器80の外に飛び散る可能性が低い。また、回転停止状態にあるガード106の開口部106dからドーム状カバー93内に入る米粒は、静止したスポーク106cと回転する粉砕ブレード92の間でせん断されるので、効率良く粉砕できる。また、ドーム状カバー93に設けられるリブ93eによって、米粒と水とが含まれる混合物の流動(粉砕ブレード92の回転と同方向の流動である)が抑制されるので、効率良く粉砕できる。
【0106】
また、粉砕された米粒と水とを含む混合物はリブ93eによって窓93dの方向に誘導されて、窓93dからドーム状カバー93の外に排出される。リブ93eは、それに向かって押し寄せる混合物に対向する側が凸となるように湾曲しているので、混合物はリブ93eの表面に対流しにくく、スムーズに窓93dの方へ流れていく。更に、ドーム状カバー93内部から混合物が排出されるのと入れ替わりに、凹部81の上の空間に存在していた混合物が凹部81に入り、凹部81からガード106の開口部106dを通ってドーム状カバー93内に入いる。このような循環をさせつつ粉砕ブレード92による粉砕を行うので、効率良く粉砕できる。
【0107】
なお、自動製パン器1においては所定の時間(本実施形態では50分)で粉砕工程が終了するようにしている。しかしながら、米粒の硬さのばらつきや環境条件によって粉砕粉の粒度にばらつきが生じることがある。このため、粉砕工程の終了を、粉砕モータ60の負荷の大きさ(例えば、モータの制御電流等で判断できる)を指標に判断する構成等としても構わない。
【0108】
また、自動製パン器1においては、蓋開閉検知センサ17を設けて蓋40の開閉状態を検知できるようにし、粉砕工程中に蓋40が開いたことを検知すると、粉砕モータ60の駆動(回転)が停止されるようになっている(制御装置120によって粉砕モータ60の駆動が禁止されるようになっている)。このため、粉砕工程中にユーザが蓋40を開けて危険な目に遭うといった事態が発生しないようになっている。
【0109】
粉砕工程が終了すると、制御装置120の指令によって練り工程が開始される。なお、この練り工程は、イーストが活発に働く温度(例えば30℃前後)で行う必要がある。このため、所定の温度範囲となった時点で練り工程を開始するようにしてもよい。
【0110】
練り工程の開始にあたって、制御装置120はクラッチ用ソレノイド73を駆動して、クラッチ56が動力伝達を行うようにする(図3(b)の状態)。そして、制御装置120は混練モータ50を制御してブレード回転軸82を正方向回転させる。ブレード回転軸82を正方向回転させると、粉砕ブレード92も正方向に回転し、粉砕ブレード92の周囲のパン原料が正方向に流動する。それにつられてドーム状カバー93が正方向(図9では時計方向)に動くと、混練ブレード101は流動していないパン原料から抵抗を受けて、開き姿勢(図9(b)参照)から折り畳み姿勢(図9(a)参照)へと角度を変えて行く。第2係合体103bの係合部103bbが第1係合体103aの係合部103abの回転軌道(図8の破線参照)に干渉する角度となると、カバー用クラッチ103の連結が生じ、ドーム状カバー93はブレード回転軸82によって本格的に駆動される態勢に入る。ドーム状カバー93と折り畳み姿勢になった混練ブレード101は、ブレード回転軸82と一体となって正方向に回転する。
【0111】
なお、以上に説明したカバー用クラッチ103の連結を確実に行うために、練り工程初期におけるブレード回転軸82の回転は、間欠回転或いは低速回転とするのが好ましい。また、上述のように、混練ブレード101が折り畳み姿勢になると、混練ブレード101の延長上に補完混練ブレード102が並ぶために、混練ブレード101があたかも大型化したかのようになって、パン原料は力強く押される。このため、生地の練り上げをしっかり行える。
【0112】
混練ブレード101の回転は、練り工程の初期においては非常にゆっくりとされ、段階的に速度が速められるように制御装置120によって制御される。混練ブレード101の回転が非常にゆっくりである練り工程の初期段階において、制御装置120は自動投入用ソレノイド16を駆動させて、パン原料収納容器42の可動フック42cが容器蓋42bを支えた状態を解消させる(容器蓋42bを回動させる)。これにより、容器本体42aの開口が開かれて、例えば、グルテン、ドライイースといったパン原料がパン容器80内に自動投入される。
【0113】
上述のように、パン原料収納容器42は、容器本体42a及び容器蓋42bの内部にコーティング層が設けられて滑り性がよくなっており、また、内部に凹凸部が設けられないように工夫されている。更に、パッキン42dの配置方法の工夫により、パン原料がパッキン42dに引っ掛かるという事態も抑制されている。このために、パン原料収納容器42にはパン原料がほとんど残ることなく、自動投入が完了する。
【0114】
なお、本実施形態では、パン原料収納容器42に収納されるパン原料を、混練ブレード101が回転している状態で投入することにしているが、これに限定されず、混練ブレード101が停止している状態で投入してもよい。ただし、本実施形態のように、混練ブレード101が回転した状態でパン原料を投入するようにした方が、パン原料を均一に分散することができるので好ましい。
【0115】
パン原料収納容器42に収納されたパン原料がパン容器80に投入された後は、混練ブレード101及び補完混練ブレード102の回転によって、パン原料は所定の弾力を有する一つにつながった生地(dough)に練り上げられていく。混練ブレード101及び補完混練ブレード102が生地を振り回してパン容器80の内壁にたたきつけることにより、混練に「捏ね」の要素が加わることになる。混練ブレード101及び補完混練ブレード102の回転によりドーム状カバー93も回転する。ドーム状カバー93が回転すると、ドーム状カバー93に形成されるリブ93eも回転するために、ドーム状カバー93内のパン原料は速やかに窓93dから排出され、混練ブレード101及び補完混練ブレード102が混練しているパン原料の塊(生地)に同化する。
【0116】
なお、練り工程においては、ドーム状カバー93と共にガード106も正方向に回転する。ガード106のスポーク106cは、正方向回転時、ガード106の中心側が先行しガード106の外周側が後続する形状とされている。このために、ガード106は、正方向に回転することにより、ドーム状カバー93内外のパン原料をスポーク106cで外側に押しやる。これにより、パンを焼き上げた後に廃棄分となる原料の割合を減らすことができる。
【0117】
また、ガード106の柱106eは、ガード106が正方向に回転するときに回転方向前面となる側面106eb(図6参照)が上向きに傾斜しているから、混練時、ドーム状カバー93の周囲のパン原料が柱106eの前面で上方に跳ね上げられる。このために、パンを焼き上げた後に廃棄分となる原料の割合を減らすことができる。
【0118】
自動製パン器1においては、練り工程の時間は、所望の弾力を有するパン生地が得られる時間として実験的に求められた所定の時間(本実施形態では10分)を採用する構成としている。ただし、練り工程の時間を一定とすると、環境温度等によってパン生地の出来上がり具合が変動する場合がある。このため、例えば、混練モータ50の負荷の大きさ(例えば、モータの制御電流等で判断できる)を指標に、練り工程の終了時点を判断する構成等としても構わない。
【0119】
なお、具材(例えばレーズン、ナッツ、チーズ等)入りのパンを焼く場合には、この練り工程の途中で投入するようにすればよい。
【0120】
練り工程が終了すると、制御装置120の指令によって発酵工程が開始される。この発酵工程では、制御装置120はシーズヒータ31を制御して、焼成室30の温度を、発酵が進む温度(例えば38℃)に維持する。そして、発酵が進む環境下で所定の時間(本実施形態では60分)放置される。
【0121】
なお、場合によっては、この発酵工程の途中で、混練ブレード101及び補完混練ブレード102を回転してガス抜きや生地を丸める処理を行うようにしても構わない。
【0122】
発酵工程が終了すると、制御装置120の指令によって焼成工程が開始される。制御装置120はシーズヒータ31を制御して、焼成室30の温度を、パン焼きを行うのに適した温度(例えば125℃)まで上昇させ、焼成環境下で所定の時間(本実施形態では50分)パンを焼くように制御する。焼成工程の終了については、例えば操作部20の液晶表示パネルにおける表示や報知音等によってユーザに知らされる。ユーザは、製パン完了を検知すると、蓋40を開けてパン容器80を取り出して、パンの製造を完了させる。
【0123】
なお、パンの底には混練ブレード101及び補完混練ブレード102(パン容器80の凹部81から上側に突き出ている)の焼き跡が残るが、ドーム状カバー93とガード106は凹部81の中に収容されるように形成しているために、それらがパンの底に大きな焼き跡を残すようなことはない。
(その他)
以上に示した自動製パン器の実施形態は本発明の一例であり、本発明が適用される自動製パン器の構成は、以上に示した実施形態に限定されるものではない。
【0124】
例えば、以上においては、蓋40自身の状態(動き)を検知して、蓋40の開閉状態を判断する構成を示した。しかし、例えば、蓋40がロック機構によって閉状態を維持できるように構成されている場合には、ロック機構の状態を検知として蓋40の開閉状態を検知する構成等としても構わない。本発明の蓋開閉検知手段には、このような構成のものも含まれる。
【0125】
また、以上においては、蓋40の開状態を検知した場合に、粉砕ブレード92を駆動するための粉砕モータ60の駆動を禁止する構成についてのみ示した。しかし、本発明はこの構成に限定されず、蓋40の開状態を検知した場合には、混練ブレードを駆動するための混練モータ50の駆動についても禁止するようにしてもよい。
【0126】
また、以上においては、自動製パン器1によって、米粒を出発原料に用いてパンを製造する場合を示したが、自動製パン器1は例えば小麦粉や米粉を出発原料に用いてパンを製造することも可能である。そして、小麦粉や米粉を出発原料に用いてパンを製造する場合には、パン原料収納容器42はレーズンやナッツ等の具材入りパンを製造する場合の具材を入れるために用いることも可能である。また、小麦粉や米粉を出発原料に用いてパンを製造する場合には、粉砕ブレード92は不要であるために、以上に示したのとは異なるパン容器(混練ブレードのみがブレード回転軸に取り付けられる従来型のパン容器)を用いる(パン容器の使い分けを行う)ようにしても構わない。なお、本発明は、米粒を出発原料に用いてパンを製造することのみが行える自動製パン器にも、勿論適用できる。
【0127】
また、以上に示した実施形態においては、米粒を出発原料に用いる場合を例に、自動製パン器の構成及び動作を説明した。しかし、本発明の自動製パン器は、例えば小麦、大麦、粟、稗、蕎麦、とうもろこし、大豆等の米粒以外の穀物粒を出発原料に使用する場合にも適用可能である。
【0128】
また、以上に示した米粒用製パンコースの製造フローは例示であり、他の製造フローとしてもよい。一例を挙げると、粉砕工程の後に、粉砕粉に水を吸水させるために、再度浸漬工程を行ってから練り工程を行う構成等としてもよい。
【0129】
また、以上に示した実施形態では、自動製パン器1が粉砕ブレード92によって穀物粒を粉砕させる場合と、パン生地を練り上げるために混練ブレード102を回転させる場合で、別々のモータを使用する構成とした。しかし、この構成に限定される趣旨ではない。すなわち、例えば1つのモータのみを備える構成とし、粉砕ブレード92によって穀物粒を粉砕させる場合と、パン生地を練り上げるために混練ブレード102を回転させる場合で、同一のモータを使用する構成としても構わない。
【0130】
また、以上に示した実施形態では、粉砕ブレード92及び混練ブレード101をユニット化して取り付ける構成としたが、これに限らず、これらのブレードは別々にブレード回転軸82に取り付けられるようにしてよい。また、場合によっては、粉砕ブレードと混練ブレードとを別々とせず、粉砕機能と混練機能とを発揮する1つのブレードのみを備える構成等としても構わない。
【産業上の利用可能性】
【0131】
本発明は、家庭用の自動製パン器に好適である。
【符号の説明】
【0132】
1 自動製パン器
10 本体
17 磁気センサ、蓋開閉検知センサ(蓋開閉検知手段)
18 永久磁石
30 焼成室
40 蓋
60 粉砕モータ(駆動手段)
80 パン容器
92 粉砕ブレード
120 制御装置(制御手段)
【技術分野】
【0001】
本発明は、主として一般家庭で使用される自動製パン器に関する。
【背景技術】
【0002】
従来の市販の家庭用自動製パン器では、次のような手順でパンが製造される(例えば、特許文献1参照)。まず、パン原料を入れたパン容器を本体内の焼成室に入れ、パン容器内のパン原料を混練ブレードで混練して生地に練り上げる(練り工程)。その後、得られた生地をパン容器内で発酵させ(発酵工程)、パン容器をそのままパン焼き型として用いてパンを焼き上げる(焼成工程)。
【0003】
このような自動製パン器を用いてパンを製造する場合、小麦や米などの穀物を製粉した粉(小麦粉、米粉等)や、そのような製粉した粉に各種の補助原料を混ぜたミックス粉を入手し、これを製パン原料として用いることによってパンを製造するのが一般的であった。
【0004】
しかしながら、一般家庭においては米粒に代表されるように、粉の形態ではなく粒の形態で穀物を所持していることがある。このために、自動製パン器を用いて穀物粒から直接パンを製造することができれば非常に便利である。このようなことから、本出願人らは、穀物粒を出発原料としてパンを製造する方法を開発している(特許文献2参照)。
【0005】
このパンの製造方法では、まず、穀物粒を液体と混合し、この混合物内で粉砕ブレードを回転して穀物粒を粉砕する(粉砕工程)。そして、粉砕工程を経て得られたペースト状の粉砕粉を含むパン原料を混練ブレードによって生地に練り上げ(練り工程)、生地を発酵(発酵工程)させた後、パンに焼き上げる(焼成工程)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2000−116526号公報
【特許文献2】特開2010−35476号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本出願人らは、家庭で穀物粒を出発原料としてパンを焼き上げられるように、上述のパンの製造方法を自動で実行可能な新しい仕組みを備えた自動製パン器の開発を行っている。この新たな仕組みを備えた自動製パン器として、焼き型として使用されるパン容器を焼成室内に収納した状態で、パン容器内で穀物粒を粉砕することを検討している。そして、液体と混合された穀物粒を所望の粒度まで効率良く粉砕できるように、粉砕ブレードを高速回転する(例えば7000〜8000rpm)モータを自動製パン器に搭載することを検討している。
【0008】
このような構成の場合、粉砕ブレードが高速回転している際に自動製パン器の蓋が開かれると、例えばパン容器内のパン原料が飛散する等、ユーザが危険な目に遭う可能性がある。
【0009】
そこで、本発明の目的は、穀物粒を出発原料として安全にパンを製造できる自動製パン器を提供することである。
【課題を解決するための手段】
【0010】
上記目的を達成するために本発明の自動製パン器は、パン原料が投入されるパン容器と、前記パン容器を収容する焼成室が設けられる本体部と、前記焼成室に収容された前記パン容器内の穀物粒を粉砕する粉砕ブレードと、前記粉砕ブレードを駆動する駆動手段と、前記焼成室を開閉する蓋部と、前記蓋部の開閉状態を検知する蓋開閉検知手段と、前記駆動手段の駆動を制御する制御手段と、を備える自動製パン器であって、前記制御手段は、前記蓋開閉検知手段によって前記蓋部が開状態であると検知した場合には、前記駆動手段の駆動を禁止することを特徴としている。
【0011】
本構成によれば、蓋部が開いた状態では粉砕ブレードが駆動されないようになっている。このために、本構成の自動製パン器では、例えば、粉砕ブレードの高速回転による影響でパン容器内の内容物がパン容器外へと飛散したり、回転体によってユーザが手をケガしたりするのを防止できる。すなわち、本構成の自動製パン器によれば、ユーザは、穀物粒を出発原料として安全にパンを製造することが可能である。
【0012】
上記構成の自動製パン器において、前記蓋開閉検知手段は、前記蓋部と非接触で前記蓋部の開閉状態を検知することとしてもよい。このような構成は、例えば磁気センサや光センサ等を使用することによって実現できる。そして、本構成によれば、例えば蓋部との接触によって蓋部の開閉を検知する機械式の検知手段(具体例としてマイクロスイッチ等が挙げられる)を用いる場合に比べて、その構成を簡素化し易い。
【0013】
上記構成の自動製パン器において、前記蓋開閉検知手段は、磁石と対になって用いられる磁気センサであることとしてもよい。本構成によれば、蓋開閉検知手段を単純な構成とし、安価に設けることが可能である。
【0014】
上記構成の自動製パン器において、前記磁気センサは前記本体部に設けられ、前記磁石は前記蓋部に設けられるのが好ましい。通常、本体部側に自動製パン器の動作を制御する制御装置が配置される。このため、本構成にように磁気センサを本体部側に配置することにより、自動製パン器の構成を簡易なものとし易い。
【0015】
上記構成の自動製パン器において、前記蓋部は、前記本体部の前面側から背面側に向けて回転することによって前記焼成室の開口を開き、前記本体部の背面側から前面側に向けて回転することによって前記焼成室の開口を閉じるように設けられており、前記蓋開閉検知手段は、前記背面寄りに設けられていることとしてもよい。
【0016】
蓋部の開閉状態を検知する蓋開閉検知手段としては、例えばマイクロスイッチのような機械式のセンサや、磁気センサ、光センサ等を用いることが想定できる。このようなセンサを正面側に配置する場合、ユーザの動作によってセンサが誤動作し易くなる場合がある。この点、本構成によれば、蓋部の開閉状態を検知する蓋開閉検知手段が自動製パン器の背面側に設けられているために、上述のような誤動作を生じ難くできる。
【発明の効果】
【0017】
本発明によると、穀物粒を出発原料として安全にパンを製造できる自動製パン器を提供できる。このため、本発明によれば、家庭でのパン製造をより身近なものとして、家庭でのパン作りが盛んになることが期待できる。
【図面の簡単な説明】
【0018】
【図1】本実施形態の自動製パン器の外観構成を示す概略斜視図
【図2】本実施形態の自動製パン器の本体内部の構成を説明するための模式図
【図3】本実施形態の自動製パン器が備える第1の動力伝達部に含まれるクラッチについて説明するための図
【図4】本実施形態の自動製パン器における、パン容器が収容された焼成室及びその周辺の構成を模式的に示す図
【図5】本実施形態の自動製パン器が備えるブレードユニットの構成を示す概略斜視図
【図6】本実施形態の自動製パン器が備えるブレードユニットの構成を示す概略分解斜視図
【図7】本実施形態の自動製パン器が備えるブレードユニットの構成を示す概略側面図及び概略断面図
【図8】本実施形態の自動製パン器が備えるブレードユニットを下から見た場合の概略平面図(ガードが取り外された場合の図)
【図9】本実施形態の自動製パン器が備えるブレードユニットの動作を説明するための図で、パン容器を上から見た場合の図
【図10】本実施形態の自動製パン器が備える蓋開閉検知センサの構成を説明するための図
【図11】本実施形態の自動製パン器の構成を示すブロック図
【図12】本実施形態の自動製パン器によって実行される米粒用製パンコースの流れを示す模式図
【発明を実施するための形態】
【0019】
以下、本発明の自動製パン器の実施形態について、図面を参照しながら詳細に説明する。なお、本明細書に登場する具体的な時間や温度等はあくまでも例示であり、本発明の内容を限定するものではない。
(自動製パン器の構成)
図1は、本実施形態の自動製パン器の外観構成を示す概略斜視図である。図1に示すように、自動製パン器1の本体(本体部)10は、操作部20が設けられた上面を有している。本体10の外殻は例えば金属や合成樹脂等によって形成される。操作部20は、スタートキー、取り消しキー、タイマーキー、予約キー、パンの製造コース(米粒を出発原料に用いてパンを製造するコース、米粉を出発原料に用いてパンを製造するコース、小麦粉を出発原料に用いてパンを製造するコース等)を選択する選択キー等の操作キー群と、時間、操作キー群によって設定された内容、エラー等を表示する表示部とによって構成されている。なお、表示部は、例えば液晶表示パネル等によって構成される。
【0020】
また、本体10には、詳細は後述するパン容器80が収容される焼成室30が設けられている。この焼成室30は、例えば板金からなる底壁30a及び4つの側壁30b(後述の図4も参照)を有する平面形状略矩形の箱形状に構成され、その上面が開口している。この焼成室30は、本体10の背面側に回動可能に一端が軸支されて、焼成室30の開口を覆う閉位置と該閉位置から所定角度回転された開位置との間で変位する蓋(蓋部)40によって開閉可能となっている。換言すると、蓋40は、本体10の正面(前面)側から背面側に向けて回転することによって焼成室30の開口を開き、本体10の背面側から正面(前面)側に向けて回転することによって焼成室30の開口を閉じるように設けられている。なお、図1は、この蓋40が開かれた状態を示している。
【0021】
この蓋40には、焼成室30内を覗けるように、例えば耐熱ガラスからなる覗き窓41が設けられている。また、蓋40には、パンの製造工程の途中で一部のパン原料を自動投入できるように、パン原料収納容器42が取り付けられている。パン原料収納容器42は、平面形状略長方形の箱形状の容器本体42aと、容器本体42aに対して回動可能に設けられて、容器本体42aの開口を開閉する容器蓋42bとを備えている。また、パン原料収納容器42は、容器蓋42bを外面(下面)側から支えて容器本体42aの開口が閉じられた状態を維持できるように設けられると共に、外部からの力によって動かされて容器蓋42bとの係合が解除されるように設けられる可動フック42cも備えている。
【0022】
操作部20下部側の本体10内には図示しない自動投入用ソレノイドが設けられており、このソレノイドが駆動すると、そのプランジャーが、蓋40に隣接する本体壁面10aに設けられる開口10bから突出するようになっている。そして、この突出したプランジャーによって可動する可動部材(図示せず)によって可動フック42cが動かされ、容器蓋42bと可動フック42cとの係合が外れて容器蓋42bが回動し、容器本体42aの開口が開かれた状態となるように構成されている。なお、図1においては、容器本体42aの開口が開かれた状態が示されている。
【0023】
容器本体42a及び容器蓋42bは、容器内に収納される粉体パン原料(例えばグルテンやドライイースト等)が容器内に残留し難いようにアルミニウム等の金属で設けられるのが好ましい。そして、それらの内面は、シリコンやフッ素等のコーティング層で覆われるのが好ましく、更には凹凸がなく滑らかに形成されるのが好ましい。
【0024】
また、米粒(穀物粒の一例)を粉砕する際に発生する蒸気等が容器本体42a内に入り込むと、パン原料が容器内面に付着し易くなって好ましくない。このために、容器内に前述の蒸気等が入り込まないように、容器本体42aの開口側縁には鍔部(フランジ部)が設けられて、この鍔部と容器蓋42bとの間にはパッキン(シール部材)42dが介在するようになっている。
【0025】
図2は、本実施形態の自動製パン器の本体内部の構成を説明するための模式図である。図2は、自動製パン器1を上側から見た場合を想定しており、図の下側が自動製パン器1の前面側、図の上側が背面側である。図2に示すように、自動製パン器1には、焼成室30の右横に練り工程で用いられる低速・高トルクタイプの混練モータ50が固定配置され、焼成室30の後ろ側に粉砕工程で用いられる高速回転タイプの粉砕モータ60が固定配置されている。混練モータ50及び粉砕モータ60はいずれも竪軸である。なお、粉砕モータ60は、本発明の粉砕ブレードを駆動する駆動手段の実施形態である。
【0026】
混練モータ50の上面から突出する出力軸51には第1のプーリ52が固定される。この第1のプーリ52は、第1のベルト53によって、その径が第1のプーリ52よりも大きく形成されると共に、第1の回転軸54の上部側に固定される第2のプーリ55に連結されている。第1の回転軸54の下部側には、その回転中心が第1の回転軸54とほぼ同一となるように第2の回転軸57が設けられている。なお、第1の回転軸54及び第2の回転軸57は、本体10内部に回転可能に支持されている。また、第1の回転軸54と第2の回転軸57との間には、動力伝達と動力遮断を行うクラッチ56が設けられている。このクラッチ56の構成については後述する。
【0027】
第2の回転軸57の下部側には第3のプーリ58が固定されている。第3のプーリ58は、第2のベルト59によって、焼成室30の下部側に設けられると共に原動軸11に固定される第1の原動軸用プーリ12(第3のプーリ58とほぼ同一の径を有する)に連結されている。混練モータ50自身が低速・高トルクタイプであり、その上、第1のプーリ52の回転が第2のプーリ55によって減速回転される(例えば1/5の速度に減速される)。このため、クラッチ56が動力伝達を行う状態で混練モータ50を駆動すると、原動軸11は低速で回転する。
【0028】
なお、第1のプーリ52、第1のベルト53、第1の回転軸54、第2のプーリ55、クラッチ56、第2の回転軸57、第3のプーリ58、第2のベルト59、及び第1の原動軸用プーリ12で構成される動力伝達部のことを、以下において第1の動力伝達部と表現することがある。
【0029】
粉砕モータ60の下面から突出する出力軸61には、第4のプーリ62が固定されている。この第4のプーリ62は、第3のベルト63によって、原動軸11に固定される第2の原動軸用プーリ13(第1の原動軸用プーリ12より下側で固定される)に連結されている。第2の原動軸用プーリ13は第4のプーリ62とほぼ同一の径を有する。粉砕モータ60には高速回転のものが選定され、第4のプーリ62の回転は第2の原動軸用プーリ13においてほぼ同一速度で維持されるために、粉砕モータ60を駆動すると、原動軸11は高速回転(例えば7000〜8000rpm)を行う。
【0030】
なお、第4のプーリ62、第3のベルト63、及び第2の原動軸用プーリ13で構成される動力伝達部のことを、以下において第2の動力伝達部と表現することがある。第2の動力伝達部は、クラッチを有さない構成であり、粉砕モータ60の出力軸61と原動軸11とを常時動力伝達可能に連結する。
【0031】
図3は、本実施形態の自動製パン器が備える第1の動力伝達部に含まれるクラッチについて説明するための図である。図3は、図2の矢印X方向に沿って見た場合を想定した図である。なお、図3(a)はクラッチ56が動力遮断を行う状態を示し、図3(b)はクラッチ56が動力伝達を行う状態を示す。
【0032】
図3に示すように、クラッチ56は、第1のクラッチ部材561と第2のクラッチ部材562とを有する。そして、第1のクラッチ部材561に設けられる爪561aと、第2のクラッチ部材562に設けられる爪562aとが噛み合う場合(図3(b)の状態)に動力伝達を行い、2つの爪561a、562bが噛み合わない場合(図3(a)の状態)に動力遮断を行うようになっている。すなわち、クラッチ56は噛み合いクラッチとなっている。
【0033】
なお、本実施形態では、2つのクラッチ部材561、562のそれぞれには、周方向(第1のクラッチ部材561を下から平面視した場合、或いは、第2のクラッチ部材562を上から平面視した場合を想定)にほぼ等間隔に並ぶ6つの爪561a、562aが設けられているが、この爪の数は適宜変更してもよい。また、爪561a、562aの形状は、好ましい形状を適宜選択すればよい。
【0034】
第1のクラッチ部材561は、抜け止め対策を施された上で、第1の回転軸54に、その軸方向(図3において上下方向)に摺動可能であると共に、相対回転不能に取り付けられている。第1の回転軸54の第1のクラッチ部材561の上部側には、バネ71が遊嵌されている。このバネ71は、第1の回転軸54に設けられるストッパ部54aと第1のクラッチ部材561とに挟まれるように配置されており、第1のクラッチ部材561を下側に向けて付勢している。一方、第2のクラッチ部材562は、第2の回転軸57の上端に固定されている。
【0035】
クラッチ56の切り替え(動力伝達状態と、動力遮断状態の切り替え)は、第1のクラッチ部材561から固定状態で延出するアーム部72と、永久磁石73aが内蔵された自己保持型のソレノイド(クラッチ用ソレノイド)73と、を用いて行われる。ソレノイド73のプランジャー73bは、その先端部(図3においては下部側が該当)がアーム部72に設けられる取付部72aに固定された状態となっている。アーム部72(取付部72aを含む)は金属で形成されているために、永久磁石73aに吸着可能となっている。
【0036】
図3(a)の状態から、ソレノイド73に、永久磁石73aの磁界を打ち消すように電圧を印加すると、永久磁石73aのアーム部72(より正確には取付部72a)を吸着する力が低下し、バネ71の付勢力によって第1のクラッチ部材561が下側に押し下げられる。これにより、第1のクラッチ部材561の爪561aと、第2のクラッチ部材562の爪562aとの噛み合いが得られ、クラッチ56は動力伝達を行うようになる(図3(b)の状態となる)。この噛み合いが得られた状態は、バネ71の付勢力によって維持されるために、第1のクラッチ部材561を引き下げるための駆動を行った後は、ソレノイド73はオフとされる。また、この噛み合いが得られた状態では、アーム部72が引き下がるために、ソレノイド73のプランジャー73bは、ハウジング73cからの突出量(下側への突出量)が増した状態となっている。
【0037】
一方、図3(b)の状態から、ソレノイド73に、プランジャー73bを引き上げる方向の電圧(永久磁石73aの磁界を打ち消す方向とは逆方向の電圧)を印加すると、バネ71の付勢力に反して、アーム部72と共に第1のクラッチ部材561が上側に引き上げられる。これにより、第1のクラッチ部材561の爪561aと、第2のクラッチ部材562の爪562aとの噛み合いが解除され、クラッチ56は動力遮断を行うようになる(図3(a)の状態となる)。この噛み合いが解除された状態においては、ソレノイド73に内蔵される永久磁石73aがアーム部72(より正確には取付部72a)を吸着する。このために、第1のクラッチ部材561を引き上げるための駆動を行った後は、ソレノイド73をオフとしても噛み合いが解除された状態を維持できるので、ソレノイド73はオフされる。
【0038】
粉砕モータ60を駆動する際に、クラッチ56が動力伝達を行う状態(図3(b)の状態)であると、原動軸11を高速回転させる回転動力が混練モータ50の出力軸51に伝達される。この場合、粉砕モータ60が例えば8000rpmで回転されるとすると、第1のプーリ52と第2のプーリ55との半径比(例えば1:5)によって、混練モータ50の出力軸51を40000rpmで回転させようとすることになる。この場合、粉砕モータ60に非常に大きな負荷が加わることになるため、粉砕モータ60が破損する可能性がある。このため、粉砕モータ60を駆動する際には、原動軸11を高速回転させる回転動力が混練モータ50の出力軸51に伝達されないようにする必要があり、自動製パン器1は、動力伝達と動力遮断を行うクラッチ56を第1の動力伝達部に含む構成となっている。
【0039】
なお、上述のように自動製パン器1においては、第2の動力伝達部にはクラッチを設けない構成としているが、この場合には上述のようなモータ破損は生じない。これは、混練モータ50を駆動しても原動軸11は低速回転(例えば180rpm等)されるのみであり、原動軸11を回転させる回転動力が粉砕モータ60の出力軸に伝達されても、混練モータ50に大きな負荷が加わることはないからである。そして、このように第2の動力伝達部に敢えてクラッチを設けない構成とすることにより、自動製パン器の製造コストを抑制している。ただし、第2の動力伝達部にクラッチを設ける構成としても勿論構わない。
【0040】
図4は、本実施形態の自動製パン器における、パン容器が収容された焼成室及びその周辺の構成を模式的に示す図である。図4は、自動製パン器1を正面(前面)側から見た場合の構成を想定しており、焼成室30及びパン容器80の構成については概ね断面図で示している。なお、パン原料が投入されるとともにパン焼き型として使用されるパン容器80は、焼成室30に対して出し入れ自在となっている。
【0041】
図4に示すように、焼成室30の内部にはシーズヒータ31(加熱手段の一例)が、焼成室30に収容されたパン容器80を包囲するように配置され、パン容器80内のパン原料(この表現にはパン生地も含まれる)を加熱できるようになっている。
【0042】
また、焼成室30の底壁30aの略中心にあたる箇所には、パン容器80を支持するパン容器支持部14(例えばアルミニウム合金のダイキャスト成型品からなる)が固定されている。このパン容器支持部14は、焼成室30の底壁30aから窪むように形成され、その窪みは上から見た場合に略円形となっている。このパン容器支持部14の中心には、上述の原動軸11が底壁30aに対して略垂直となるように支持されている。
【0043】
パン容器80は例えばアルミニウム合金のダイキャスト成型品(その他、板金等で構成しても構わない)であり、バケツのような形状をしており、開口部側縁に設けられる鍔部80aに手提げ用のハンドル(図示せず)が取り付けられている。パン容器80の水平断面は四隅を丸めた矩形である。また、パン容器80の底部には、詳細は後述するブレードユニット90の一部を収容する平面視略円形状の凹部81が形成されている。
【0044】
パン容器80の底部中心には、垂直方向に延びるブレード回転軸82が、シール対策が施された状態で回転可能に支持されている。このブレード回転軸82の下端(パン容器80の底部から突き出ている)には容器側カップリング部材82aが固定されている。また、パン容器80の底部外面側には、容器側カップリング部材82aを取り囲むように筒状の台座83が設けられており、パン容器80は、この台座83がパン容器支持部14に受け入れられた状態で、焼成室30内に収容されるようになっている。なお、台座83は、パン容器80とは別に形成してもよいし、パン容器80と一体的に形成してもよい。
【0045】
パン容器支持部14の内周面と台座83の外周面とには、それぞれ図示しない突起が形成されており、これらの突起は周知のバヨネット結合を構成する。すなわち、パン容器80をパン容器支持部14に取り付ける際、台座83の突起がパン容器支持部14の突起に干渉しないようにしてパン容器80を下ろす。そして、台座83がパン容器支持部14に嵌り込んだ後、パン容器80を水平にひねると、パン容器支持部14の突起の下面に台座83の突起が係合するようになっている。これにより、パン容器80は上方に抜けなくなる。
【0046】
なお、この操作で、ブレード回転軸82の下端に設けられる前述の容器側カップリング部材82aと、原動軸11の上端に固定される原動軸側カップリング部材11aとの連結(カップリング)も同時に達成される。そして、このカップリングにより、ブレード回転軸82は原動軸11から回転動力が伝えられるようになる。
【0047】
ブレード回転軸82のパン容器80内部に突出する部分には、その上からブレードユニット90が着脱可能に取り付けられるようになっている。このブレードユニット90の構成について、図5から図9を参照しながら説明する。なお、図5は、本実施形態の自動製パン器が備えるブレードユニットの構成を示す概略斜視図である。図6は、本実施形態の自動製パン器が備えるブレードユニットの構成を示す概略分解斜視図である。図7は、本実施形態の自動製パン器が備えるブレードユニットの構成を示す図で、図7(a)は概略側面図、図7(b)は図7(a)のA−A位置における断面図である。図8は、本実施形態の自動製パン器が備えるブレードユニットを下から見た場合の概略平面図で、図8(a)は混練ブレードが折り畳み姿勢にある場合の図、図8(b)は混練ブレードが開き姿勢にある場合の図である。図8においては、後述のガードが取り外された状態を示している。図9は、本実施形態の自動製パン器が備えるブレードユニットの動作を説明するための図で、パン容器を上から見た場合の図である。図9(a)は混練ブレードが折り畳み姿勢にある場合の図、図9(b)は混練ブレードが開き姿勢にある場合の図である。
【0048】
ブレードユニット90は、大きくは、ユニット用シャフト91と、ユニット用シャフト91に相対回転不能且つ着脱可能に取り付けられる粉砕ブレード92と、ユニット用シャフト91に相対回転可能且つ粉砕ブレード92を覆うように取り付けられる平面視略円形のドーム状カバー93と、を備える構成となっている(例えば、図5〜図7参照)。ブレードユニット90をブレード回転軸82に取り付けた状態において、粉砕ブレード92は、パン容器80の凹部81底面より少し上の箇所に位置する。また、粉砕ブレード90及びドーム状カバー93のほぼ全体は凹部81に収容される。
【0049】
ユニット用シャフト91は、例えばステンレス鋼板等の金属によって形成される略円柱状の部材であり、一方端(図6及び図7の下端)に開口が設けられ、その内部は中空となっている。また、ユニット用シャフト91の下部側には、ユニット用シャフト91を直径方向に横断する溝91aが形成されている(例えば図6参照)。ユニット用シャフト91をブレード回転軸82の上から嵌め込んだ(被せた)場合に、ブレード回転軸82を水平に貫くピン(図示せず)が溝91aに係合し、ユニット用シャフト91をブレード回転軸82に相対回転不能に連結する。
【0050】
なお、図7(b)に示すように、ブレード回転軸82(破線で示す)の上面(略円形状)の中央部に設けられる凸部82aと係合するように、ユニット用シャフト91の上部側内面の中央部には凹部91bが形成されている。これにより、ユニット用シャフト91とブレード回転軸82との中心を合わせた状態で、ブレードユニット90をブレード回転軸82に容易に取り付けることができ、ブレードを回転する際に不要なガタツキ等が発生することを抑制できる。本実施形態では、ブレード回転軸82側に凸部82a、ユニット用シャフト91側に凹部91bを設ける構成としたが、これとは逆に、ブレード回転軸82側に凹部、ユニット用シャフト91側に凸部を設ける構成としても構わない。
【0051】
米粒粉砕用の粉砕ブレード92は例えばステンレス鋼板によって形成され、その形状は例えば飛行機のプロペラのようになっている。粉砕ブレード92の中心部には、図6に示すように、平面視略矩形状の開口92aが形成されている。粉砕ブレード92は、ユニット用シャフト91の下部側から、開口92aにユニット用シャフト91を嵌め込むようにして取り付けられている。
【0052】
ユニット用シャフト91の下部側は、円柱の側面を削ったような形状となっており、下から見た場合に、粉砕ブレード92の開口92aとほぼ同形状(略矩形状)となっている。また、この略矩形状部分(ユニット用シャフト91の下部側部分)のサイズは、粉砕ブレード92の開口92aより、ほんの僅かだけ小さくなっている。このような形状を採用しているために、粉砕ブレード92はユニット用シャフト91に相対回転不能に取り付けられる。ユニット用シャフト91の粉砕ブレード92より下側部分には抜け止め用のストッパ部材94が嵌め込まれるために、粉砕ブレード92がユニット用シャフト91から脱落することはない。
【0053】
粉砕ブレード91を囲んで覆い隠すように配置されるドーム状カバー93は、例えばアルミニウム合金のダイキャスト成型品からなり、その内面側には、ベアリング95(本実施形態では転がり軸受けを使用)を収容する凹状の収容部931(図7(b)参照)が形成されている。換言すると、この収容部931を形成するために、ドーム状カバー93は、それを外面から見た場合に、中央部に略円柱状の凸部93aが形成された構成となっている。なお、凸部93aの外面には開口が形成されておらず、収容部931に収容されるベアリング95はその側面及び上面が収容部931の壁面に囲い込まれた状態となっている。
【0054】
ベアリング95は上下に抜け止めリング96a、96bが配置された状態で、その内輪95aがユニット用シャフト91に相対回転不能に取り付けられている(内輪95a内側の貫通孔にユニット用シャフト91が圧入されている)。また、ベアリング95は、その外輪95bが収容部931の側壁に固定されるように、収容部931に圧入されている。このベアリング95(内輪95aが外輪95bに対して相対回転する)の介在によって、ドーム状カバー93はユニット用シャフト91に相対回転可能に取り付けられている。
【0055】
また、ドーム状カバー93の収容部931には、外部からベアリング95内に異物(例えば米粒の粉砕時に用いられる液体や粉砕により得られたペースト状物等)が入り込まないように、例えばシリコン系或いはフッ素系の材料によって形成されるシール材97及び、このシール材97を保持する金属製のシールカバー98が、ベアリング95の下部側から圧入されている。シールカバー98は、ドーム状カバー93への固定が確実となるように、リベット99によってドーム状カバー93に固着されている。このリベット99による固定は行わなくてもよいが、確実な固定を得るために、本実施形態のように構成するのが好ましい。
【0056】
ドーム状カバー93の外面には、凸部93aに隣接する箇所に垂直方向に延びるように配置された支軸100(図6参照)により、平面形状「く」の字形の混練ブレード101(例えばアルミニウム合金のダイキャスト成型品からなる)が取り付けられている。混練ブレード101は、支軸100に相対回転不能に取り付けられており、ドーム状カバー93に相対回転可能に取り付けられる支軸100と動きを共にする。
【0057】
また、本実施形態では、ドーム状カバー93の外面に、混練ブレード101に並ぶように補完混練ブレード102(例えばアルミニウム合金のダイキャスト成型品からなる)が固定配置されている。この補完混練ブレード102は、必ずしも設ける必要がないが、パン生地を練り上げる練り工程における混練効率を高めるために設けるのが好ましい。
【0058】
ここで、混練ブレード101の動作について説明する。混練ブレード101は、支軸100と共に支軸100の軸線周りに回転し、図5、図7、図8(a)及び図9(a)に示す折り畳み姿勢と、図8(b)及び図9(b)に示す開き姿勢との2姿勢をとる。折り畳み姿勢では、混練ブレード101の下縁から垂下した突起101a(図5及び図6参照)がドーム状カバー93の上面に設けられた第1のストッパ部93bに当接し、混練ブレード101はそれ以上ドーム状カバー93に対し反時計方向(上から見た場合を想定)の回動を行うことができない。この折り畳み姿勢では、混練ブレード101の先端がドーム状カバー93から少し突き出している。
【0059】
この姿勢(図9(a)の状態)から混練ブレード101がドーム状カバー93に対して時計方向(上から見た場合を想定)に回動して図9(b)に示す開き姿勢になると、混練ブレード101の先端はドーム状カバー93から大きく突き出す。この開き姿勢における混練ブレード101の開き角度は、ドーム状カバー93の内面に設けられる第2のストッパ部93c(図8参照)によって制限される。詳細は後述する第2係合体103b(支軸100に固定される)が第2のストッパ部93cに当って回転できなくなった時点で、混練ブレード101は最大開き角度となる。
【0060】
なお、混練ブレード101が折り畳み姿勢となっている場合には、例えば図5や図7に示すように補完混練ブレード102は混練ブレード101に整列し、あたかも「く」の字形状の混練ブレード101のサイズが大型化したようになる。
【0061】
ところで、ユニット用シャフト91には、図6に示すように、粉砕ブレード92とシールカバー98との間にカバー用クラッチ103を構成する第1係合体103aが取り付けられている。例えば亜鉛ダイカストからなる第1係合体103aには略矩形状の開口103aaが形成されており、この開口103aaにユニット用シャフト91の下部側の平面視略矩形状部分が嵌め込まれることにより、第1係合体103aはユニット用シャフト91に相対回転不能に取り付けられている。この第1係合体103aは粉砕ブレード92よりも先に、ユニット用シャフト91の下側から嵌め込まれ、ストッパ部材94によって、粉砕ブレード92と共にユニット用シャフト91からの脱落が防止されている。なお、本実施形態では、第1係合体103aとシールカバー93との間には、第1係合体103aの劣化防止等を考慮してワッシャ104を配置する構成としているが、このワッシャ104は必ずしも設けなくてもよい。
【0062】
また、混練ブレード101が取り付けられる支軸100の下部側には、カバー用クラッチ103を構成する第2係合体103bが取り付けられている。例えば亜鉛ダイカストからなる第2係合体103bには略矩形状の開口103baが形成されており、この開口103baに支軸100の下部側の平面視略矩形状部分が嵌め込まれることにより、第2係合体103bは支軸100に相対回転不能に取り付けられている。なお、本実施形態では、第2係合体103bの上側に、第2係合体103bの劣化防止等を考慮してワッシャ105を配置する構成としているが、このワッシャ105は必ずしも設けなくてもよい。
【0063】
第1係合体103aと第2係合体103bとで構成されるカバー用クラッチ103は、ブレード回転軸82の回転動力をドーム状カバー93に伝達するか否かを切り替えるクラッチとして機能する。カバー用クラッチ103は、混練モータ50が原動軸11を回転させるときのブレード回転軸82の回転方向(この回転方向を「正方向回転」とする。図8では反時計方向回転、図9では時計方向回転となる。)において、ブレード回転軸82とドーム状カバー93を連結する。逆に、粉砕モータ60が原動軸11を回転させるときのブレード回転軸82の回転方向(この回転方向を「逆方向回転」とする。図8では時計方向回転、図9では反時計方向回転となる。)では、カバー用クラッチ103はブレード回転軸82とドーム状カバー93の連結を切り離す。以下、このカバー用クラッチ103の動作について更に詳細に説明する。
【0064】
混練ブレード101が折り畳み姿勢にある場合(例えば図8(a)、図9(a)の状態)、第2係合体103bの係合部103bbは第1係合体103aの係合部103ab(本実施形態では2つあるが1つでもよい)の回転軌道に干渉する角度となる(図8(a)の破線参照)。このため、ブレード回転軸82が正方向回転すると、第1係合体103aと第2係合体103bは係合し、ブレード回転軸82の回転動力がドーム状カバー93に伝達される。
【0065】
一方、混練ブレード101が開き姿勢にある場合(例えば図8(b)、図9(b)の状態)、第2係合体103bの係合部103bbは第1係合体103aの係合部103abの回転軌道から逸脱した角度となる(図8(b)の破線参照)。このために、ブレード回転軸82が回転しても、第1係合体103aと第2係合体103bは係合しない。従って、ブレード回転軸82の回転動力はドーム状カバー93に伝達されない。
【0066】
例えば図5及び図6に示すように、ドーム状カバー93には、カバー内空間とカバー外空間を連通する窓93dが形成される。窓93dは粉砕ブレード92に並ぶ高さか、それよりも上の位置に配置される。なお、本実施形態では、計4個の窓93dが90°間隔で並んでいるが、それ以外の数と配置間隔を選択することもできる。
【0067】
また、ドーム状カバー93内面には、各窓93dに対応して計4個のリブ93eが形成されている。各リブ93eはドーム状カバー93の中心近傍から外周の環状壁まで半径方向に斜めに延び、4個合わさって一種の巴形状を構成する。また、各リブ93eは、それに向かって押し寄せるパン原料に対面する側が凸となるように湾曲している。
【0068】
また、ドーム状カバー93の下面には、着脱可能なガード106が取り付けられている。このガード106は、ドーム状カバー93の下面を覆って粉砕ブレード92にユーザの指が接近するのを阻止する。ガード106は、例えば耐熱性を有するエンジニアリングプラスチックによって形成され、例えばPPS(ポリフェニレンサルファイド)等の成型品とできる。なお、このガード106は設けなくても構わないが、ユーザが安心して使用できるように設けるのが好ましい。
【0069】
例えば図6に示すように、ガード106の中心には、ユニット用シャフト91に固定されるストッパ部材94を通すリング状のハブ106aがある。また、ガード106の周縁にはリング状のリム106bがある。ハブ106aとリム106bとは複数のスポーク106cで連結される。スポーク106c同士の間は、粉砕ブレード92によって粉砕される米粒を通す開口部106dとなる。開口部106dは、指が通り抜けられない程度の大きさとなっている。
【0070】
ガード106は、ドーム状カバー93に取り付けられた時、粉砕ブレード92と近接状態となる。そして、あたかも、ガード106が回転式電気かみそりの外刃で、粉砕ブレード92が内刃のような形になる。
【0071】
リム106bの周縁には、90°間隔で計4個(この構成に限定されないのは言うまでもない)の柱106eが一体成形されている。この柱106eのガード106中心側を向いた側面には、一端が行き止まりになった水平な溝106eaが形成される。この溝106eaにドーム状カバー93の外周に形成される突起93f(実施形態では、45°間隔で計8個配置されている)を係合することによって、ガード106はドーム状カバー106に取り付けられる。なお、溝106eaと突起93fはバヨネット結合を構成するように設けられている。
【0072】
自動製パン器1では、粉砕ブレード92及び混練ブレード101を1つのユニット(ブレードユニット90)内に設ける構成としているので、その取り扱いが便利である。ユーザは、ブレードユニット90をブレード回転軸82から簡単に引き抜くことが可能であり、製パン作業終了後にブレードの洗浄を手軽に行うことができる。また、ブレードユニット90が備える粉砕ブレード92は、ユニット用シャフト91に着脱可能に取り付けられるものであり、その量産が行いやすく、ブレード交換等のメンテナンス性にも優れる。
【0073】
また、本実施形態の自動製パン器1では、パン容器80に水等の液体が入れられるために、ユニット用シャフト91に対してドーム状カバー93を相対回転可能とするベアリング95に液体が入り込まないように、ベアリング95は密閉する必要がある。この点、自動製パン器1では、ベアリング95がドーム状カバー93に設けられる凹状の収容部931に収容されているために、ドーム状カバーの内面側にのみシール手段(シール材97及びシールカバー98)を設ければベアリング95を密閉できる。このため、ベアリング95の上下にシール手段を設ける必要がなく、ベアリング95のシール構造の小型化が図れる。このため、自動製パン器1では、焼き上がったパンの形状に対する悪影響(例えば、パンの底面が大きく凹む等)を抑制することが可能になる。
【0074】
ところで、本実施形態の自動製パン器1においては、米粒(穀物粒の一例)を粉砕する際に、粉砕モータ60によって粉砕ブレード92を高速回転する構成となっている。このような構成では、粉砕ブレード92の回転中にユーザが自動製パン器1の蓋40を開けると、例えばパン容器80内のパン原料が飛散したり、パン容器80内の回転体によってユーザが手をケガしたりする等、ユーザに危険が及ぶ可能性がある。このため、自動製パン器1においては、蓋40の開閉状態を検知する蓋開閉検知センサを設けて、蓋40が開いた状態では、粉砕モータ60の駆動(回転)が行われないようになっている。以下、自動製パン器1が備える蓋開閉検知センサの構成について説明する。
【0075】
図10は、本実施形態の自動製パン器が備える蓋開閉検知センサの構成を説明するための図で、図10(a)は第1構成例の図で、図10(b)は第2構成例の図である。
【0076】
まず、自動製パン器1を上から見た状態を示す図10(a)を参照しながら、第1構成例の蓋開閉検知センサについて説明する。図10(a)に示すように、本体10の操作部20が設けられる側の上部背面寄りであって蓋40に対向する側面近傍には、磁気センサ17が設けられている。この磁気センサ17は、本発明の蓋開閉検知センサの実施形態である。磁気センサ17は、詳細には本体10の内部に固定配置されており、外部からは見えない。このために、図10(a)では磁気センサ17を破線で示している。
【0077】
また、蓋40には、蓋40が閉じられた状態において、本体10に配置される磁気センサ17と対向配置される永久磁石18が固定配置されている。この永久磁石18は、例えば蓋40の外側面に凹部を設けて、その凹部に固定配置する構成としてもよいし、また、蓋40の内部に固定配置するようにしても構わない。本実施形態では、蓋40を上から見た場合に永久磁石18は見えないために、図10(a)では永久磁石18を破線で示している。
【0078】
蓋40を開いた状態とするために、蓋40が閉じられた状態(ここでは、蓋40の下面と本体10が当接した状態を想定している)から背面側に向かって蓋40を回転すると、永久磁石18が磁気センサ17から離れる方向に移動する(図1参照)。このために、蓋40が開かれると磁気センサ17によって検知される磁力の大きさが変化する。すなわち、磁気センサ17によって蓋40の開閉状態を検知することが可能となる。
【0079】
本実施形態の自動製パン器1では、蓋開閉検知センサとして機能する磁気センサ17は、永久磁石18と対になって蓋40の開閉を検知できる構成となっている。永久磁石18の磁力は、磁気センサ17で蓋40の開閉動作に伴う磁力の変化を確実に検知できるように、適宜決定すればよい。
【0080】
なお、本実施形態では、蓋40が閉じられた状態において、磁気センサ17及び永久磁石18が自動製パン器1の背面寄りに位置する構成としているが、この構成に限定される趣旨ではない。例えば、蓋40が閉じられた状態において、磁気センサ17及び永久磁石18が自動製パン器1の正面(前面)寄りに位置するような構成としても構わない。
【0081】
磁気センサ17及び永久磁石18が自動製パン器1の正面寄りに位置するような構成としては、図10(a)のように配置される磁気センサ17及び永久磁石18を正面側にスライド移動させたような構成でも構わないし、図10(b)に示す第2構成例のようにしてもよい。図10(b)は自動製パン器1を正面から見た状態を示している。第2構成例では、磁気センサ17は、本体10正面側壁の裏面側であって蓋40と当接する当接面近傍の操作部20寄りの位置(本体内部)に設けられている。また、永久磁石18は蓋40の正面寄りの内部に設けられ、蓋40を閉じた状態において、磁気センサ17と対向配置するように設けられている。この場合も、磁気センサ17で蓋40の開閉動作に伴う磁力の変化を検知できる。図10(b)においても、外部から磁気センサ17及び永久磁石18が見えないために、これらは破線で示している。
【0082】
なお、磁気センサ17及び永久磁石18は、第1構成例のように自動製パン器1の背面寄りに配置した方が好ましいと考えられる。ユーザは通常正面側に位置して自動製パン器1の操作等を行う。正面側に磁気センサ17を配置すると、例えばユーザが磁力の発生源を有しているような場合に、ユーザが自動製パン器1の操作等を行っている際に、本来の状態に反して蓋40が閉じられていると誤検知する可能性が高まると考えられるからである。
【0083】
また、図10に示す第1構成例及び第2構成例では、磁気センサ17を本体10側、永久磁石18を蓋40側に設ける構成としているが、この逆の構成(磁気センサ17を蓋40側、永久磁石18を本体18側とする構成)としても構わない。ただし、自動製パン器1の制御装置は本体10側に配置されるのが通常であり、前者の方が、構成が複雑となり難い。
【0084】
また、本実施形態では、蓋40の開閉状態を検知する蓋開閉検知センサとして、磁石と対になって用いられる磁気センサを用いる構成とした。しかし、蓋開閉検知センサの構成は、本実施形態の構成に限定されるものではない。すなわち、例えば、発光部と受光部とを備えるフォトインタラプタ(いわゆる透過型でも反射型でもよい)のような光センサ、金属センサ(蓋40が金属で構成されている場合には金属センサで蓋の開閉検知可能)、マイクロスイッチ等の機械式センサ等を蓋開閉検知センサとして用いてもよい。
【0085】
磁気センサ、光センサ、金属センサ等は、蓋40と非接触で蓋40の開閉状態を検知できるために、機械式センサに比べて蓋40の開閉状態を検知する構成を単純な構成としやすい。また、蓋40と非接触で蓋40の開閉状態を検知できる構成のうち、本実施形態に示す磁気センサ17を用いる構成は安価とし易い点で好ましい。
【0086】
また、マイクロスイッチを用いる場合には、通常は図10(b)に示す磁気センサ17と同様に、本体10正面側に配置することが想定される。マイクロスイッチを用いる場合には、蓋40との接触部を確保するために、その一部を外部に露出させる必要があるが、この部分にはパン原料として用いられる水が掛かり易い(水をこぼしてしまう等が想定される)といった問題がある。マイクロスイッチに水が掛かると故障するために、マイクロスイッチを蓋開閉検知センサとして用いる場合には、シール対策を施すのが好ましい。この点、本実施形態のように磁気センサ17を用いる場合には、磁石18も含めて蓋開閉検知センサを構成する部材を外部に露出しないように構成できるために、水がかかって故障するといった心配がない。
【0087】
図11は、本実施形態の自動製パン器の構成を示すブロック図である。図11に示すように、自動製パン器1における制御動作は制御装置120によって行われる。制御装置120は、例えば、CPU(Central Processing Unit)、ROM(Read Only Memory)、RAM(Random Access Memory)、I/O(input/output)回路部等からなるマイクロコンピュータ(マイコン)によって構成される。この制御装置120は、焼成室30の熱の影響を受け難い位置に配置するのが好ましい。また、制御装置120には、時間計測機能が備えられており、パンの製造工程における時間的な制御が可能となっている。
【0088】
制御装置120には、上述の操作部20と、焼成室30の温度を検知する温度センサ15と、上述の蓋開閉検知センサ(磁気センサ)17と、混練モータ駆動回路121と、粉砕モータ駆動回路122と、ヒータ駆動回路123と、第1のソレノイド駆動回路124と、第2のソレノイド駆動回路125と、が電気的に接続されている。
【0089】
混練モータ駆動回路121は、制御装置120からの指令の下で混練モータ50の駆動を制御するための回路である。また、粉砕モータ駆動回路122は、制御装置120からの指令の下で粉砕モータ60の駆動を制御するための回路である。ヒータ駆動回路123は、制御装置120からの指令の下でシーズヒータ31の動作を制御するための回路である。第1のソレノイド駆動回路124は、制御装置120からの指令の下で、パンの製造工程の途中で一部のパン原料を自動投入する際に駆動する自動投入用ソレノイド16の駆動を制御するための回路である。第2のソレノイド駆動回路125は、制御装置120からの指令の下でクラッチ56(図3参照)の状態を切り替えるクラッチ用ソレノイド73(図3参照)の駆動を制御するための回路である。
【0090】
制御装置120は、操作部20からの入力信号に基づいてROM等に格納されたパンの製造コース(製パンコース)に係るプログラムを読み出し、各駆動回路121〜125を介して各部を制御しながら、自動製パン器1にパンの製造工程を実行させる。また、制御装置120は、蓋開閉検知センサ17によって蓋40が開いた状態(開状態)であると検知した場合には、粉砕モータ60が回転(動作)中であれば粉砕モータ60の回転を停止させ、粉砕モータ60が回転していない状態であれば粉砕モータ60が回転開始しないように制御する。
【0091】
蓋40が開状態であるか、閉状態であるかの判断は、例えば、予め制御装置120のROM等に磁力に関する閾値を記憶させておくことで実現できる。すなわち、磁気センサ17によって検知される磁力が予め記憶させておいた閾値よりも小さくなった時点で蓋40が開いていると判断し、磁気センサ17によって検知される磁力が閾値以上となった時点で蓋40が閉じていると判断するようにすることができる。
【0092】
なお、蓋40の下面が本体10と当接した状態から、蓋40が背面側に向かってどの程度回動した位置を蓋40が開いた状態とするかは、ユーザの安全性等を考慮して適宜決定すればよい。例えば、蓋40の下面と本体10との接触がなくなった瞬間の位置を蓋40が開いた状態としてもよいし、前述の接触がなくなった瞬間の位置より、もう少し蓋40が背面側に向かって回転した位置を蓋40が開いた状態としてもよい。
(自動製パン器の動作)
次に、以上のように構成される自動製パン器1によってパンを製造する場合の自動製パン器1の動作について説明する。ここでは、自動製パン器1によって、米粒を出発原料に用いてパンを製造する場合を例に自動製パン器1の動作を説明する。
【0093】
米粒を出発原料に用いる場合には、米粒用製パンコースが実行される。図12は自動製パン器によって実行される米粒用製パンコースの流れを示す模式図である。図11に示すように、米粒用製パンコースにおいては、浸漬工程と、粉砕工程と、練り(捏ね)工程と、発酵工程と、焼成工程と、がこの順番で順次に実行される。
【0094】
米粒用製パンコースを開始するにあたって、ユーザは、パン容器80のブレード回転軸82にユニット用シャフト91を被せることによって、ブレードユニット90をブレード回転軸82に取り付ける。この作業は蓋40が開いた状態で行われる。自動製パン器1においては、上述のように蓋開閉検知センサ17によって蓋40が開いた状態を検知し、蓋40が開いた状態では粉砕モータ60の駆動が開始しないようになっている(粉砕モータ60の駆動が禁止されている)。このため、この作業中に粉砕モータ60が回転開始することがなく、ユーザは安全にブレードユニット90を取り付けられる。
【0095】
また、ユーザは、米粒、水、調味料(例えば食塩、砂糖、ショートニング等)をそれぞれ所定量ずつ計量してパン容器80に入れる。また、ユーザは、パンの製造工程の途中で自動投入されるパン原料を計量してパン原料収納容器42の容器本体42aに入れる。そして、収納すべきパン原料を容器本体42aに収納したら、可動フック42cによって容器蓋42aを支えることにより、容器蓋42bによって容器本体42aの開口が閉じられた状態とする。
【0096】
なお、パン原料収納容器42に収納されるパン原料としては、例えば、グルテン、ドライイースト等が挙げられる。ただし、グルテンの代わりに、例えば小麦粉、増粘剤(グアガム等)及び上新粉のうちの少なくとも1つをパン原料収納容器42に収納するようにしてもよい。また、グルテン、小麦粉、増粘剤、上新粉等は用いずに、例えばドライイーストのみをパン原料収納容器42に収納するようにしてもよい。更に、場合によっては、例えば食塩、砂糖、ショートニングといった調味料についてもパンの製造工程の途中で自動投入すべく、例えばグルテン、ドライイーストと共にパン原料収納容器42に収納するようにしてもよい。この場合には、パン容器80に予め投入しておくパン原料は米粒及び水(単なる水の代わりに、例えばだし汁のような味成分を有する液体、果汁やアルコールを含有する液体等でもよい)となる。
【0097】
この後、ユーザは、パン容器80を焼成室30に入れ、更に、パン原料収納容器42を蓋40の所定位置に取り付ける。そして、ユーザは蓋40を閉じ、操作部20によって米粒用製パンコースを選択し、スタートキーを押す。これにより、制御装置120によって米粒を出発原料に用いてパンを製造する米粒用製パンコースが開始される。
【0098】
米粒用製パンコースがスタートされると、制御装置120の指令によって浸漬工程が開始される。浸漬工程では、パン容器80に予め投入されたパン原料が静置状態とされ、この静置状態が予め定められた所定時間(本実施形態では50分)維持される。この浸漬工程は、米粒に水を含ませることによって、その後に行われる粉砕工程において、米粒を芯まで粉砕しやすくすることを狙う工程である。
【0099】
なお、米粒の吸水速度は水の温度によって変動し、水温が高いと吸水速度が高まり、水温が低いと吸水速度が低下する。このために、浸漬工程の時間は、例えば自動製パン器1が使用される環境温度等によって変動させるようにしてもよい。これにより、米粒の吸水度合いのばらつきを抑制できる。また、浸漬時間を短時間とするために、浸漬工程時にシーズヒータ31に通電して焼成室30の温度を高めるようにしてもよい。
【0100】
また、浸漬工程においては、その初期段階で粉砕ブレード92を回転させ、その後も断続的に粉砕ブレード92を回転させるようにしてもよい。このようにすると、米粒の表面に傷をつけることができ、米粒の吸液効率を高められる。
【0101】
上記所定時間が経過すると、制御装置120の指令によって、浸漬工程が終了され、米粒を粉砕する粉砕工程が開始される。この粉砕工程では、米粒と水とが含まれる混合物の中で粉砕ブレード92が高速回転される。具体的には、制御装置120は、粉砕モータ60を制御してブレード回転軸82を逆方向回転させ、米粒と水とが含まれる混合物の中で粉砕ブレード92の高速回転を実行させる。
【0102】
なお、粉砕モータ60を用いて粉砕ブレード92を回転させる場合、制御装置120は、クラッチ用ソレノイド73を駆動させて、クラッチ56が動力遮断を行うようにする(図3(a)の状態とする)。上述したように、このように制御しないとモータ破損の可能性があるからである。
【0103】
粉砕ブレード92を回転させるために、ブレード回転軸82が逆方向回転された場合、ドーム状カバー93もブレード回転軸82の回転に追随して回転を開始するが、次のような動作によってドーム状カバー93の回転はすぐに阻止される。粉砕ブレード92を回転させるためのブレード回転軸82の回転に伴うドーム状カバー93の回転方向は、図9において反時計方向であり、混練ブレード101は、それまで折り畳み姿勢(図9(a)に示す姿勢)であった場合には、米粒と水が含まれる混合物から受ける抵抗で開き姿勢(図9(b)に示す姿勢)に転じる。混練ブレード101が開き姿勢になると、カバー用クラッチ103は、第2係合体103bの係合部103bbが第1係合体103aの係合部103abの回転軌道(図8の破線参照)から逸脱するために、ブレード回転軸82とドーム状カバー93の連結を切り離す。同時に、開き姿勢になった混練ブレード101は図9(b)に示すように、パン容器80の内側壁に当るために、ドーム状カバー93の回転は阻止される。
【0104】
粉砕工程における米粒の粉砕は、先に行われた浸漬工程によって米粒に水が浸み込んだ状態で実行されるために、米粒を芯まで容易に粉砕することができる。粉砕工程における粉砕ブレード92の回転は本実施形態では間欠回転とされる。この間欠回転は、例えば30秒回転して5分間停止するというサイクルで行われ、このサイクルが10回繰り返される。なお、最後のサイクルでは、5分間の停止は行わない。粉砕ブレード92の回転は連続回転としてもよいが、例えばパン容器80内の原料温度が高くなり過ぎることを防止する等の目的のために、間欠回転とするのが好ましい。
【0105】
粉砕工程においては、粉砕がドーム状カバー93内で行われるから、米粒がパン容器80の外に飛び散る可能性が低い。また、回転停止状態にあるガード106の開口部106dからドーム状カバー93内に入る米粒は、静止したスポーク106cと回転する粉砕ブレード92の間でせん断されるので、効率良く粉砕できる。また、ドーム状カバー93に設けられるリブ93eによって、米粒と水とが含まれる混合物の流動(粉砕ブレード92の回転と同方向の流動である)が抑制されるので、効率良く粉砕できる。
【0106】
また、粉砕された米粒と水とを含む混合物はリブ93eによって窓93dの方向に誘導されて、窓93dからドーム状カバー93の外に排出される。リブ93eは、それに向かって押し寄せる混合物に対向する側が凸となるように湾曲しているので、混合物はリブ93eの表面に対流しにくく、スムーズに窓93dの方へ流れていく。更に、ドーム状カバー93内部から混合物が排出されるのと入れ替わりに、凹部81の上の空間に存在していた混合物が凹部81に入り、凹部81からガード106の開口部106dを通ってドーム状カバー93内に入いる。このような循環をさせつつ粉砕ブレード92による粉砕を行うので、効率良く粉砕できる。
【0107】
なお、自動製パン器1においては所定の時間(本実施形態では50分)で粉砕工程が終了するようにしている。しかしながら、米粒の硬さのばらつきや環境条件によって粉砕粉の粒度にばらつきが生じることがある。このため、粉砕工程の終了を、粉砕モータ60の負荷の大きさ(例えば、モータの制御電流等で判断できる)を指標に判断する構成等としても構わない。
【0108】
また、自動製パン器1においては、蓋開閉検知センサ17を設けて蓋40の開閉状態を検知できるようにし、粉砕工程中に蓋40が開いたことを検知すると、粉砕モータ60の駆動(回転)が停止されるようになっている(制御装置120によって粉砕モータ60の駆動が禁止されるようになっている)。このため、粉砕工程中にユーザが蓋40を開けて危険な目に遭うといった事態が発生しないようになっている。
【0109】
粉砕工程が終了すると、制御装置120の指令によって練り工程が開始される。なお、この練り工程は、イーストが活発に働く温度(例えば30℃前後)で行う必要がある。このため、所定の温度範囲となった時点で練り工程を開始するようにしてもよい。
【0110】
練り工程の開始にあたって、制御装置120はクラッチ用ソレノイド73を駆動して、クラッチ56が動力伝達を行うようにする(図3(b)の状態)。そして、制御装置120は混練モータ50を制御してブレード回転軸82を正方向回転させる。ブレード回転軸82を正方向回転させると、粉砕ブレード92も正方向に回転し、粉砕ブレード92の周囲のパン原料が正方向に流動する。それにつられてドーム状カバー93が正方向(図9では時計方向)に動くと、混練ブレード101は流動していないパン原料から抵抗を受けて、開き姿勢(図9(b)参照)から折り畳み姿勢(図9(a)参照)へと角度を変えて行く。第2係合体103bの係合部103bbが第1係合体103aの係合部103abの回転軌道(図8の破線参照)に干渉する角度となると、カバー用クラッチ103の連結が生じ、ドーム状カバー93はブレード回転軸82によって本格的に駆動される態勢に入る。ドーム状カバー93と折り畳み姿勢になった混練ブレード101は、ブレード回転軸82と一体となって正方向に回転する。
【0111】
なお、以上に説明したカバー用クラッチ103の連結を確実に行うために、練り工程初期におけるブレード回転軸82の回転は、間欠回転或いは低速回転とするのが好ましい。また、上述のように、混練ブレード101が折り畳み姿勢になると、混練ブレード101の延長上に補完混練ブレード102が並ぶために、混練ブレード101があたかも大型化したかのようになって、パン原料は力強く押される。このため、生地の練り上げをしっかり行える。
【0112】
混練ブレード101の回転は、練り工程の初期においては非常にゆっくりとされ、段階的に速度が速められるように制御装置120によって制御される。混練ブレード101の回転が非常にゆっくりである練り工程の初期段階において、制御装置120は自動投入用ソレノイド16を駆動させて、パン原料収納容器42の可動フック42cが容器蓋42bを支えた状態を解消させる(容器蓋42bを回動させる)。これにより、容器本体42aの開口が開かれて、例えば、グルテン、ドライイースといったパン原料がパン容器80内に自動投入される。
【0113】
上述のように、パン原料収納容器42は、容器本体42a及び容器蓋42bの内部にコーティング層が設けられて滑り性がよくなっており、また、内部に凹凸部が設けられないように工夫されている。更に、パッキン42dの配置方法の工夫により、パン原料がパッキン42dに引っ掛かるという事態も抑制されている。このために、パン原料収納容器42にはパン原料がほとんど残ることなく、自動投入が完了する。
【0114】
なお、本実施形態では、パン原料収納容器42に収納されるパン原料を、混練ブレード101が回転している状態で投入することにしているが、これに限定されず、混練ブレード101が停止している状態で投入してもよい。ただし、本実施形態のように、混練ブレード101が回転した状態でパン原料を投入するようにした方が、パン原料を均一に分散することができるので好ましい。
【0115】
パン原料収納容器42に収納されたパン原料がパン容器80に投入された後は、混練ブレード101及び補完混練ブレード102の回転によって、パン原料は所定の弾力を有する一つにつながった生地(dough)に練り上げられていく。混練ブレード101及び補完混練ブレード102が生地を振り回してパン容器80の内壁にたたきつけることにより、混練に「捏ね」の要素が加わることになる。混練ブレード101及び補完混練ブレード102の回転によりドーム状カバー93も回転する。ドーム状カバー93が回転すると、ドーム状カバー93に形成されるリブ93eも回転するために、ドーム状カバー93内のパン原料は速やかに窓93dから排出され、混練ブレード101及び補完混練ブレード102が混練しているパン原料の塊(生地)に同化する。
【0116】
なお、練り工程においては、ドーム状カバー93と共にガード106も正方向に回転する。ガード106のスポーク106cは、正方向回転時、ガード106の中心側が先行しガード106の外周側が後続する形状とされている。このために、ガード106は、正方向に回転することにより、ドーム状カバー93内外のパン原料をスポーク106cで外側に押しやる。これにより、パンを焼き上げた後に廃棄分となる原料の割合を減らすことができる。
【0117】
また、ガード106の柱106eは、ガード106が正方向に回転するときに回転方向前面となる側面106eb(図6参照)が上向きに傾斜しているから、混練時、ドーム状カバー93の周囲のパン原料が柱106eの前面で上方に跳ね上げられる。このために、パンを焼き上げた後に廃棄分となる原料の割合を減らすことができる。
【0118】
自動製パン器1においては、練り工程の時間は、所望の弾力を有するパン生地が得られる時間として実験的に求められた所定の時間(本実施形態では10分)を採用する構成としている。ただし、練り工程の時間を一定とすると、環境温度等によってパン生地の出来上がり具合が変動する場合がある。このため、例えば、混練モータ50の負荷の大きさ(例えば、モータの制御電流等で判断できる)を指標に、練り工程の終了時点を判断する構成等としても構わない。
【0119】
なお、具材(例えばレーズン、ナッツ、チーズ等)入りのパンを焼く場合には、この練り工程の途中で投入するようにすればよい。
【0120】
練り工程が終了すると、制御装置120の指令によって発酵工程が開始される。この発酵工程では、制御装置120はシーズヒータ31を制御して、焼成室30の温度を、発酵が進む温度(例えば38℃)に維持する。そして、発酵が進む環境下で所定の時間(本実施形態では60分)放置される。
【0121】
なお、場合によっては、この発酵工程の途中で、混練ブレード101及び補完混練ブレード102を回転してガス抜きや生地を丸める処理を行うようにしても構わない。
【0122】
発酵工程が終了すると、制御装置120の指令によって焼成工程が開始される。制御装置120はシーズヒータ31を制御して、焼成室30の温度を、パン焼きを行うのに適した温度(例えば125℃)まで上昇させ、焼成環境下で所定の時間(本実施形態では50分)パンを焼くように制御する。焼成工程の終了については、例えば操作部20の液晶表示パネルにおける表示や報知音等によってユーザに知らされる。ユーザは、製パン完了を検知すると、蓋40を開けてパン容器80を取り出して、パンの製造を完了させる。
【0123】
なお、パンの底には混練ブレード101及び補完混練ブレード102(パン容器80の凹部81から上側に突き出ている)の焼き跡が残るが、ドーム状カバー93とガード106は凹部81の中に収容されるように形成しているために、それらがパンの底に大きな焼き跡を残すようなことはない。
(その他)
以上に示した自動製パン器の実施形態は本発明の一例であり、本発明が適用される自動製パン器の構成は、以上に示した実施形態に限定されるものではない。
【0124】
例えば、以上においては、蓋40自身の状態(動き)を検知して、蓋40の開閉状態を判断する構成を示した。しかし、例えば、蓋40がロック機構によって閉状態を維持できるように構成されている場合には、ロック機構の状態を検知として蓋40の開閉状態を検知する構成等としても構わない。本発明の蓋開閉検知手段には、このような構成のものも含まれる。
【0125】
また、以上においては、蓋40の開状態を検知した場合に、粉砕ブレード92を駆動するための粉砕モータ60の駆動を禁止する構成についてのみ示した。しかし、本発明はこの構成に限定されず、蓋40の開状態を検知した場合には、混練ブレードを駆動するための混練モータ50の駆動についても禁止するようにしてもよい。
【0126】
また、以上においては、自動製パン器1によって、米粒を出発原料に用いてパンを製造する場合を示したが、自動製パン器1は例えば小麦粉や米粉を出発原料に用いてパンを製造することも可能である。そして、小麦粉や米粉を出発原料に用いてパンを製造する場合には、パン原料収納容器42はレーズンやナッツ等の具材入りパンを製造する場合の具材を入れるために用いることも可能である。また、小麦粉や米粉を出発原料に用いてパンを製造する場合には、粉砕ブレード92は不要であるために、以上に示したのとは異なるパン容器(混練ブレードのみがブレード回転軸に取り付けられる従来型のパン容器)を用いる(パン容器の使い分けを行う)ようにしても構わない。なお、本発明は、米粒を出発原料に用いてパンを製造することのみが行える自動製パン器にも、勿論適用できる。
【0127】
また、以上に示した実施形態においては、米粒を出発原料に用いる場合を例に、自動製パン器の構成及び動作を説明した。しかし、本発明の自動製パン器は、例えば小麦、大麦、粟、稗、蕎麦、とうもろこし、大豆等の米粒以外の穀物粒を出発原料に使用する場合にも適用可能である。
【0128】
また、以上に示した米粒用製パンコースの製造フローは例示であり、他の製造フローとしてもよい。一例を挙げると、粉砕工程の後に、粉砕粉に水を吸水させるために、再度浸漬工程を行ってから練り工程を行う構成等としてもよい。
【0129】
また、以上に示した実施形態では、自動製パン器1が粉砕ブレード92によって穀物粒を粉砕させる場合と、パン生地を練り上げるために混練ブレード102を回転させる場合で、別々のモータを使用する構成とした。しかし、この構成に限定される趣旨ではない。すなわち、例えば1つのモータのみを備える構成とし、粉砕ブレード92によって穀物粒を粉砕させる場合と、パン生地を練り上げるために混練ブレード102を回転させる場合で、同一のモータを使用する構成としても構わない。
【0130】
また、以上に示した実施形態では、粉砕ブレード92及び混練ブレード101をユニット化して取り付ける構成としたが、これに限らず、これらのブレードは別々にブレード回転軸82に取り付けられるようにしてよい。また、場合によっては、粉砕ブレードと混練ブレードとを別々とせず、粉砕機能と混練機能とを発揮する1つのブレードのみを備える構成等としても構わない。
【産業上の利用可能性】
【0131】
本発明は、家庭用の自動製パン器に好適である。
【符号の説明】
【0132】
1 自動製パン器
10 本体
17 磁気センサ、蓋開閉検知センサ(蓋開閉検知手段)
18 永久磁石
30 焼成室
40 蓋
60 粉砕モータ(駆動手段)
80 パン容器
92 粉砕ブレード
120 制御装置(制御手段)
【特許請求の範囲】
【請求項1】
パン原料が投入されるパン容器と、
前記パン容器を収容する焼成室が設けられる本体部と、
前記焼成室に収容された前記パン容器内の穀物粒を粉砕する粉砕ブレードと、
前記粉砕ブレードを駆動する駆動手段と、
前記焼成室を開閉する蓋部と、
前記蓋部の開閉状態を検知する蓋開閉検知手段と、
前記駆動手段の駆動を制御する制御手段と、
を備える自動製パン器であって、
前記制御手段は、前記蓋開閉検知手段によって前記蓋部が開状態であると検知した場合には、前記駆動手段の駆動を禁止することを特徴とする自動製パン器。
【請求項2】
前記蓋開閉検知手段は、前記蓋部と非接触で前記蓋部の開閉状態を検知することを特徴とする請求項1に記載の自動製パン器。
【請求項3】
前記蓋開閉検知手段は、磁石と対になって用いられる磁気センサであることを特徴とする請求項1又は2に記載の自動製パン器。
【請求項4】
前記磁気センサは前記本体部に設けられ、前記磁石は前記蓋部に設けられることを特徴とする請求項3に記載の自動製パン器。
【請求項5】
前記蓋部は、前記本体部の前面側から背面側に向けて回転することによって前記焼成室の開口を開き、前記本体部の背面側から前面側に向けて回転することによって前記焼成室の開口を閉じるように設けられており、
前記蓋開閉検知手段は、前記背面寄りに設けられていることを特徴とする請求項1から4のいずれかに記載の自動製パン器。
【請求項1】
パン原料が投入されるパン容器と、
前記パン容器を収容する焼成室が設けられる本体部と、
前記焼成室に収容された前記パン容器内の穀物粒を粉砕する粉砕ブレードと、
前記粉砕ブレードを駆動する駆動手段と、
前記焼成室を開閉する蓋部と、
前記蓋部の開閉状態を検知する蓋開閉検知手段と、
前記駆動手段の駆動を制御する制御手段と、
を備える自動製パン器であって、
前記制御手段は、前記蓋開閉検知手段によって前記蓋部が開状態であると検知した場合には、前記駆動手段の駆動を禁止することを特徴とする自動製パン器。
【請求項2】
前記蓋開閉検知手段は、前記蓋部と非接触で前記蓋部の開閉状態を検知することを特徴とする請求項1に記載の自動製パン器。
【請求項3】
前記蓋開閉検知手段は、磁石と対になって用いられる磁気センサであることを特徴とする請求項1又は2に記載の自動製パン器。
【請求項4】
前記磁気センサは前記本体部に設けられ、前記磁石は前記蓋部に設けられることを特徴とする請求項3に記載の自動製パン器。
【請求項5】
前記蓋部は、前記本体部の前面側から背面側に向けて回転することによって前記焼成室の開口を開き、前記本体部の背面側から前面側に向けて回転することによって前記焼成室の開口を閉じるように設けられており、
前記蓋開閉検知手段は、前記背面寄りに設けられていることを特徴とする請求項1から4のいずれかに記載の自動製パン器。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2012−45290(P2012−45290A)
【公開日】平成24年3月8日(2012.3.8)
【国際特許分類】
【出願番号】特願2010−192265(P2010−192265)
【出願日】平成22年8月30日(2010.8.30)
【出願人】(000001889)三洋電機株式会社 (18,308)
【出願人】(000214892)三洋電機コンシューマエレクトロニクス株式会社 (1,582)
【Fターム(参考)】
【公開日】平成24年3月8日(2012.3.8)
【国際特許分類】
【出願日】平成22年8月30日(2010.8.30)
【出願人】(000001889)三洋電機株式会社 (18,308)
【出願人】(000214892)三洋電機コンシューマエレクトロニクス株式会社 (1,582)
【Fターム(参考)】
[ Back to top ]