
自動視覚事象検出の方法と装置
【課題】事象の自動視角検出のための方法及びシステムの提供
【解決手段】事象の画像を記録し、表示と、人間的または、自動分析のためにそれらを検索し、事象が検出される場合、外部装置へ同期された信号を送るための事象の自動視覚検出のための方法と装置が公開される。事象とは、撮像装置の視野内のある時間変化条件の中でも特定の条件に相当し、それは、事象が起こる二次元の視野のデジタル画像の取得、および分析に基づき視覚手段により検出され得る。事象は、分析のために画像を得ることが望まれる、まれな、短時間の機械の故障に相当する場合がある。事象は、視野の複数の画像の分析から得られた証拠を考慮することにより検出され、その間に機械構成要素の移動が複数の視点から見られ得る。
【解決手段】事象の画像を記録し、表示と、人間的または、自動分析のためにそれらを検索し、事象が検出される場合、外部装置へ同期された信号を送るための事象の自動視覚検出のための方法と装置が公開される。事象とは、撮像装置の視野内のある時間変化条件の中でも特定の条件に相当し、それは、事象が起こる二次元の視野のデジタル画像の取得、および分析に基づき視覚手段により検出され得る。事象は、分析のために画像を得ることが望まれる、まれな、短時間の機械の故障に相当する場合がある。事象は、視野の複数の画像の分析から得られた証拠を考慮することにより検出され、その間に機械構成要素の移動が複数の視点から見られ得る。
【発明の詳細な説明】
【技術分野】
【0001】
[発明の背景]
本発明は、高速ビデオ事象検出、動作分析、画像記録、自動画像分析に関係するものである。
【背景技術】
【0002】
[関連技術の説明]
人の目では速すぎて見ることが難しい機械システムの分析動作のために、高速画像記録装置を使うことは、当技術分野で周知である。これらの装置は、スローモーションまたは、スチール画像としての画像を表示し、人間のユーザーのために高速機械動作を見て、分析するために、機械処理の毎秒数百または数千の画像を取得し、録画するものである。
【0003】
特に関心があるものに、機械処理において故障を引き起こす場合がある、まれな、短時間の機械的事象の記録である。事象がまれで短時間であるという事実は、特別な課題を生む。たとえば、画像記録装置が毎秒1000画像を録音するとすれば、事象は、3ミリ秒続き、平均一時間に一度起こる。追加の装置なしに、人間のユーザーが事象を含む2または3の事象を見つけるために平均360万の写真を見る必要があるであろう。
【0004】
事象が起こる場合、示す画像記録装置のトリガ信号を供給することにより、この課題に対応することは、当技術分野で周知のことである。画像記録装置は、最新の画像の限られた数を保存し、トリガ信号が事象が起こったことを示す場合、録画の最後の一秒であると言い、簡単な追加時間を記録し、終了する。これは、事象の前後の両方で見る、各画像の少数をユーザーに与える。更に、各画像がトリガ信号により示された事象の時間に関連して取得された場合、ユーザーは、確実に分かる。
【0005】
明らかに、この方法の成功は、的確なトリガ信号を生成することができるかどうかによる。この目的のために光検出器を使うことは、当技術分野で周知のことである。例示的な光検出器は、物体の表面の点により反映される、または、物体が通過する可能性のある経路沿いに送信される光の強度に対応する光源と単一光電子センサーを持つ。ユーザーの調整可能な感度閾値は、光検出器の出力信号に電圧を加える上の(または、下の)光強度を確立する。
【0006】
それは、しばしば、複数の光検出器がトリガ信号を供給する必要がある例である。たとえば、機械処理が製造ラインの生産離散物体である場合、事象は、部品不足で物体の生産に対応し、一つは、物体が存在する時に検出するもの、もう一つは、部品不足を検出するためのものとして、少なくとも2つの光検出器が必要である。時々、複雑な事象を検出するために2つ以上の検出器が必要である。
【0007】
しかし、トリガ信号の供給に光検出器を使うことには、次のような幾つかの欠点がある。
・一つ以上の点で送信または、反射される光の強度の単純な測定は、事象を検出するためには不十分である場合がある。
・確実に正確な点を見るように、各光検出器の位置を調整するのは難しい。
・測定された点は、機械的な処理の通常操作の間、あちこち移動させてはならない。
・複数の光検出器の必要性は、導入、設定を難しくさせる。
【0008】
トリガ信号の供給に機械視覚システムを使うことは、当技術分野で周知のことである。機械視覚システムは、二次元の視野のデジタル画像を取得でき、画像を分析し、決定することができる装置である。画像は、積分時間、または、シャッター時間と呼ばれる、短時間に、レンズにより配置に焦点される光に対して、感光部材の二次元配置を感光させることにより取得する。その配置は、撮像装置と呼ばれ、個々の要素は、ピクセルと呼ばれる。各ピクセルは、シャッター時間でそれに向かって行く光の強度を測定する。測定された強度値は、デジタル数に変換され、画像形成のための視覚システムのメモリで保存され、それは、決定のための当技術分野で周知の方法を用いて、コンピュータのようなデジタル処理要素で分析される。
【0009】
機械視覚システムは、光検出器の限度を避けることができる。一つの機械視覚システムが、多くの光検出器に交換でき、単一点強度測定の代わりに、広範な明るさのパターンの高度な測定を行う。見る位置を調整するには、スクリュードライバーやレンチの代わりにグラフィカル・ユーザー・インターフェイスを使ってすることができ、それらの位置は、それ自身の画像の内容に基づき、各画像を移動させることができる。
【0010】
しかし、機械視覚システムには、下記のような固有の欠点がある。
・機械視覚システムは一般に、事象が個々の物体の検査に関係するものであるときにしか一般に適しない。
・機械視覚システムは、遅すぎて短時間しか持続しない事象を検出できないため、不良品のような事象により発生する長期間持続する状態を探さなければいけない。
【0011】
ここで留意すべきは、機械視覚システムが、トリガ信号を供給するのに使われたとき、それは、高速画像記録装置とは別々のものであることである。それは、検出された事象を含む画像は、見れないし、その装置より取得された画像を分析できない。たとえ、それらの画像が機械視覚システムで利用できるとしても、とてつもなく割合が高く、生産されるので、従来の設計の機械視覚システムより分析されない。
【0012】
視覚検出器の方法と装置は、トリガ事象が起こったことを検出するための従来の技術の光検出器と機械視覚システムの上記に説明される限度を克服することができる、新規の方法とシステムを教える。また、これらの教えは、原型の教えの範囲の下で、改善を導く発明のための材料を提供する。以下の章では、視覚検出器の方法と装置を簡単に要約し、それに続く章では、本発明により扱われた問題を提示する。
【0013】
[視覚検出器の方法と装置]
視覚検出器の方法と装置は、検出され、検査された物体が位置し得る二次元の視野のデジタル画像を取得し、画像を分析し、決定することに基づいて、物体の自動光電子工学の検出と検査のためのシステムと方法を供給する。これらのシステムと方法は、広範なエリアから反映した明るさのパターンを分析し、物体の多くの区別できる特徴に対処し、ソフトウェア手段を通して、ライン切り替えを供給し、不確かな利用できる物体の位置に対応する。それらは、従来の技術の機械視覚システムよりもあまり高価ではなく、設定するのがより簡単で、はるかに高速で操作できる。これらのシステムと方法は、更に、物体が動くことの多くの見通しを活用し、トリガなしに操作でき、適切な同期化される出力信号を供給し、当業者に明らかであるほかの重要で役に立つ能力を供給する。
【0014】
視覚検出器の方法と装置の一つの態様は、従来の技術の視覚システムよりも高速で一連の画像をを取得し、分析できる、視覚検出器と呼ばれる、装置である。取得され、分析されたこのような一連の画像が、フレームと呼ばれる。動いているものが視野(FOV)を通過した場合、フレームレートと呼ばれる、フレームが取得され、分析される割合が、それが多数の連続フレーム内に見られることが十分に高いと言われる。物体が連続するフレーム間で動いているので、視野で多くの位置に置かれ、それゆえに、照明に関連した多数の視覚の視点と位置から見られる。
【0015】
視覚検出器の方法と装置のもう一つの態様は、動的画像分析と呼ばれる、物体が視野に位置し、多数のフレームを取得し、分析することにより、フレームのそれぞれから得られる証拠の合成結果を基にすることにより、物体を検査するための方法である。その方法は、単一のフレームを基づいて、決定する従来の技術の機会視覚システムを超える重要な利点を供給する。
【0016】
更に、視覚検出器の方法と装置のもう一つの態様は、視覚事象検出と呼ばれる、視野で起こる可能性のある事象を検出するための方法である。事象は、視野を通過する物体であり、視覚事象検出を使うことにより、トリガ信号の必要なしに、物体を検出する。
【0017】
視覚検出器の方法と装置の追加の態様は、そこに示される図の研究と詳細な説明で明らかになるだろう。
【0018】
多数の視点から画像を得るために、検出され、検査される物体が、連続のフレーム間で少なくとも視野の少数の割合で、少なくとも2、3ピクセルで動くことが好ましい。視覚検出器の方法と装置によれば、物体の動きは、フレームにつき、FOVの約1/ 4以下であることが一般に好ましく、例示的な具体例では、たったFOVの5%もしくはそれ以下であることが好ましい。これは、製造処理を遅くするだけでなく、十分な高フレームレートを供給することにより、達成することが好ましい。例のシステムでは、フレームレートは、少なくとも毎秒200フレームで、もう一つの例では、フレームレートは、物体が視覚検出器に出現する平均の割合の少なくとも40倍である。
【0019】
例示的なシステムは、毎秒500フレームまで取得し、分析できるように教えられている。このシステムは、従来の技術の視覚システムよりもはるかに少ないピクセルを持つ、超敏感な撮像装置を利用している。高感度は、低価なLEDを用いて、とても短いシャッター時間を可能にし、それは、それぞれ少数のピクセルの合成でとても短い取得時間を可能にする。撮像装置は、分析操作で動的にピクセルデータを受取り、保存できる、デジタル・シグナル・プロセッサ(DSP)へ接続する。そこで教えられ、DSPのための適応するソフトウェアを用い、実行された方法を使い、一般に各フレームを分析する時間は、次のフレームを取得するのに必要とされる時間内で保持することができる。取得と分析の方法と装置は、好ましい高フレームレートを供給するために合成される。本発明の物体を用い、撮像装置、DSPと照明のの能力を注意深く一致させることにより、例示的なシステムは、従来の技術の機械視覚システムよりも著しく低価にすることができる。
【0020】
視覚事象検出の方法は、連続フレームを取得し、事象が起こっている、もしくは、起こった証拠を決定するために各フレームを分析することを含む。視覚事象検出がトリガ信号の必要なしに、物体を検出するのに使われた場合、分析は、物体が視野に位置している証拠を決定する。
【0021】
例示的な方法では、証拠は、物体検出加重と称する、物体が視野に位置している信頼度のレベルを示す値の形式である。その値は、信頼度のレベルの範囲、または、証拠を導く情報のいくつかの項目を示す数で、高いまたは、低い信頼度を示す、単にはい/いいえの選択であってもよい。このような数の例の一つとして、そこに更に説明された、いわゆるファジー論理値である。ここで留意すべきは、機械は、画像から完璧な決定をすることができないので、不完全な証拠に基づいて判断をすることになる。
【0022】
物体検出を実行する場合、各フレームは、物体が視野に位置しているということを十分に示す証拠があるかどうかを決定するために試験される。単にはい/いいえの値が使われた場合、その値が「はい」であれば、証拠は、十分であると見なされ得る。数が使われた場合、充足は、閾値までの数を比較することにより決定されてよい。証拠が十分であるフレームは、有効フレームと称する。ここで留意すべきは、手元にある特定のアプリケーションの理解に基づいて、視覚検出器を設定する人間のユーザーによって結局のところは定義されたもので十分な証拠は、構成されていることである。視覚検出器は、自動的にその決定をする定義に適応する。
【0023】
物体検出を実行する場合、視野を通過した各物体は、視覚検出器の高フレームレートによって、多数の有効フレームを生成する。しかし、いくつかの視点または、ほかの状態であり得る、視野を物体が通過するために、これらのフレームは、事象が視野に位置している証拠は十分でないので、正確には連続ではない場合がある。したがって、有効フレームが見つかった場合、物体の検出を始め、多くの連続する無効フレームが見つかるまで終了しないことが好ましい。この数は、ユーザーにより適切に選択される。
【0024】
有効フレームのセットが視野を通過する物体に対応することができるということがわかると、物体が実際に検出されたかどうかを決定するためにさらなる分析を実行することが好ましい。このさらなる分析は、有効フレームの数、物体検出加重の合計、平均物体検出加重、および、同等のものを含む、有効フレームの統計を考慮することができる。
【0025】
動的画像分析の方法は、物体を検査するための多数のフレームを取得し、分析することを含み、「検査」は、物体の状態についての情報を決定することを意味する。この方法の一つの例では、物体の状態は、ユーザーにより必要に応じて選ばれた検査基準をその物体が満たすかどうかを含む。
【0026】
視覚検出器の方法と装置の態様では、視覚事象検出方法により選ばれた有効フレームは、物体を検査するために動的画像分析方法により使われたものであるので、動的画像分析は、視覚事象検出と組み合わされる。視覚検出器の方法と装置のその他の態様では、動的画像分析により使われたフレームは、トリガ信号に応答することで取得することができる。
【0027】
このような各フレームは、物体が検査基準を満たす証拠を決定するために分析される。一つの例示的な方法では、物体合格スコアと称する、物体が検査基準を満たす信頼のレベルを示す値の形式である。物体の検出加重と同様に、その値は、高い、または、低い信頼度や、信頼度のレベルの範囲や証拠を導く情報のいくつかの項目を示すファジー論理値のような数を示す、単にはい/いいえの選択であってよい。
【0028】
物体の状態は、物体合格スコアの平均または、百分率のような、物体合格スコアの統計から決定されてよい。また、状態は、物体決定加重を用い、加重平均または、加重百分率のような、加重統計により決定されてもよい。加重統計は、その信頼が、物体が実際にそのフレームの視野に位置していることが高いことを特徴とする、フレームから更に重要な証拠として重きをおく。
【0029】
物体の検出と検査の証拠は、物体の一つ以上の可視特徴についての情報のためのフレームを検査することによって得られる。可視特徴は、放射光の量、パターン、または、その他の特徴が、物体の出現、独自性、状態についての情報を伝達する、その物体の一部分である。光は、物体の外部または内部の情報源の反映、伝達、または、屈折、または、物体の内部の情報源であることを含むが、それらに限らない、いくつかの処理または、処理の組み合わせにより、放射される。
【0030】
視覚検出器の方法と操作の一つの態様は、物体検出加重と物体合格スコアを含み、それに対し、証拠が必要とされる各フレームの一つ以上の関心領域で画像分析操作により、証拠を得る方法である。この方法の一つの例では、画像分析操作は、関心領域でピクセル値に基づいて測定を算定し、その測定は、物体の可視特徴の適切な特徴に応答するものである。測定は、閾値操作による論理値に転換され、関心領域から得られた論理値は、フレームの証拠を形成するために組み合わされる。論理値は、必要に応じて、二元またはファジーの閾値と論理結合を使う、二元、またはファジー論理値である。
【0031】
視覚事象検出のため、物体が視野に位置していることの証拠が関心領域、測定、閾値、論理合成、および、他のここに更に説明されたパラメータにより、有効に定義され、それは、まとめて視覚検出器の設定と呼ばれ、本発明の与えられたアプリケーションのために必要に応じて、ユーザーにより選ばれる。同様に、視覚検出器の設定は、十分な証拠を構成するものとして定義される。
【0032】
動的画像分析のために、物体が検査基準を満たす証拠はまた、視覚検出器の設定により、有効に定義される。
【0033】
[問題点の検討]
高速事象検出、動作分析、画像記録のためのトリガを供給する光検出器と機械視覚システムの与えられた限度は、高速視覚事象検出を供給することにより、および、それを高速画像記録と統合することにより、トリガ信号の必要性を避ける方法とシステムの改善が必要である。
【0034】
視覚検出器の方法と装置は、動作分析で使うための画像記録で統合を学ばせないで、ほかの利点で、高速視覚事象検出を供給する新規の画像分析の方法とシステムを学ばせる。従って、事象の自動視覚検出、記録、検索のための新規の役に立つ方法とシステムを達成するための好ましい画像記録と表示能力を用い、好ましい要素と視覚検出器の方法と装置の設定を組み合わせた方法とシステムの改善が必要である。
【0035】
更に、視覚検出器の方法と装置は、視野を通過する個々の物体に対応する事象を検出することを主として、視覚事象検出の実例となる具体例を供給する。これらの教授は、ほかの事象タイプを検出するのに使用できることは当業者には明らかであろうが、そこに教えられない改善はまた、このような事象を検出するのに役立つことができる。従って、さまざまな事象を検出するのにその実用性を改善するために視覚事象検出の教授を広げる必要がある。
【発明の開示】
【課題を解決するための手段】
【0036】
[発明の概要]
本発明により、事象の自動視覚検出、記録および検索のための方法およびシステムが提供される。本明細書では、
・「事象」とは、視覚手段により検出できる、撮像装置の視野内の一部の時間変化条件の中の特定条件を指す。
・「自動視覚検出」とは、前記撮像装置により取得された画像の内容を基本にして、人間の介入または外部のトリガ信号を必要とせずに事象が検出されることを意味する。
・「記録」とは、前記事象がメモリに保管される前、保管される間、および/または保管された後に対応する画像を意味する。
・「検索」とは、これらの画像が、人間のユーザーのための表示などの目的のために検索され、さらに、画像分析システムによりさらに自動分析されることを意味する。
【0037】
本明細書において開示される方法およびシステムは、事象が発生したことを外部機器に発信する、および事象がいつ発生したかを示す同期出力パルスを提供するなど、しかしこれらに限定されない任意の目的のために、事象の自動視覚検出に有用である。機械的処理の高速運動分析にさらに有用であり、短時間のまれな事象の画像用のその他任意の応用が望ましい。
【0038】
本発明の開示に従い、ビジョン検出器またはその他の適切なデバイスは、一部の特別な条件に対応するイベントが発生することのある機械的処理などのように、その視野が一部の時間変化条件を含むように配置され、事象を検出するように構成される。前記ビジョン検出器は、各フレームが視野の画像である、一連のフレームを取得する。さらに、視覚検出器の方法と装置で開示された方法およびシステムなど、しかしこれらに限定されない任意のさまざまな方法およびシステムを使用して、以下でさらに詳細が明らかになるように、視野で事象が発生したという証拠を取得するために前記フレームを分析する。
【0039】
事象が発生すると、分析は、事象が発生したという十分な証拠を明らかにする「事象フレーム」のセットを識別する。セットは、事象フレームを1個だけ含むこともあるが、複数の事象フレームを含むこともある。本明細書で開示される例示的実施形態では、事象フレームは一連のフレームで連続しているが、事象フレームが完全に連続していない場合も、本発明の範囲内において実施例を考案することは容易である。
【0040】
次の例を考慮する。検出される事象は、許容範囲外で移動している運動機械構成要素に対応する。ビジョン検出器は、許容範囲外の視野の領域である、誤差範囲の構成要素を検出するように構成される。一部の機械サイクルでは、構成要素は3個の連続フレームの間、誤差範囲を通過運動すると想定する。さらに、フレームの分析により、構成要素が第一番目と第三番目のフレームで誤差範囲にあることを示す証拠は強く、構成要素が第二番目のフレームで誤差範囲にあることを示す証拠は弱いことが明らかになると想定する。これは、第二番目のフレームの照明に対する構成要素の視点または位置が、構成要素が見えにくい視点または位置であるために発生することがある。また、分析により、構成要素は、3個の重要なフレームの前後で、多数のフレームがその範囲にあったとは考えにくいことも明らかにする。
【0041】
事象フレームのセットは、第一番目のフレームが前記事象が発生していることを強く示す証拠を明らかにしたときに開始し、以降のフレームが前記事象が継続していることを示す証拠がないときに第三番目のフレームで終了した。第一番目と第三番目のフレームを合わせた肯定的な証拠と、第二番目のフレームの弱い証拠は、事象が発生したと結論づけるに十分であると判断される。この例では、3個のフレームが事象フレームである。
【0042】
一部の実施例では、第二番目のフレームは事象フレームとは見なされない。第二番目のフレームを事象フレームであると考えるかどうかの選択は、本発明の範囲内ではどちらにも考えることができる。本明細書に開示された例示的実施形態では、事象フレームは連続的であり、第二番目のフレームを含むと考える。
【0043】
証拠が事象が発生したと決定するために十分であると判断されると、複数の選択されたフレームが一連のフレームから選ばれて、メモリに記録される。フレームは、事象フレーム、または、後述するように計算される記録時間に対する一連のフレームの中の位置に応じて、記録されるために選択される。事象フレーム自体が記録されることもあるが、一連のフレームの中の事象フレームの前のフレームが記録されることもある。また、一連のフレームの中の事象フレームの後のフレームが記録されることもある。例示的実施形態では、記録時間に対してユーザーが指定した時間間隔内で取得されたフレームが記録される。別の例示的実施形態では、事象フレームと事象フレームの直前および直後の連続フレームなど、予め決定された数のフレームが記録される。
【0044】
これらの保管された選択フレームからのフレームが、コマンドに応答して検索され、コマンドを発行するために、グラフィカルユーザーインターフェイスを使用している人間のユーザーのための表示、さらに、コマンドを発行している画像分析システムによりさらに自動化された画像分析など、さまざまな目的のために使用される。
【0045】
フレームが人間のユーザーのために表示される実施例では、一般的には一度にいくつかのフレームを表示することが望ましいが、典型的にはユーザーが各画像で有用な詳細を見るために十分なディスプレイ解像度で記録した画像を一度にすべて表示することは実用的ではない。本発明に従い、記録されたフレームの一部が一度に表示される。ユーザーは、表示される部分を前後に移動するスクロールコマンドを発行することにより、表示される部分を選択する。一度に表示される部分は、数個のフレームを含むことが好ましいが、最低1つのフレームを含むことができる。
【0046】
例示的実施形態として、フレームはグラフィカルユーザーインターフェイス(GUI)を使用して表示される。一度に表示されるフレーム部分は、GUIの「映写スライドウィンドウ」に含まれており、低解像度の連続した「サムネイル」画像としてフレーム部分を表示する。サムネイル画像の解像度は、有用な数の画像を一度に見ることができるに十分な低解像度にも、各画像の詳細を見ることができる高解像度にも選択される。スクロールコマンドは、従来のGUI要素により提供される。
【0047】
この例示的実施例は、さらに、画像表示ウィンドウにおいて、完全な解像度で前記フレーム部分の1個のフレームを表示する。スクロールコマンドにより映写スライドを前後に移動すると、画像表示ウィンドウに表示されるフレームも前後に移動する。
【0048】
例示的実施例では、視野において事象が発生したという証拠は、事象が発生しているまたは発生した信用レベルを示す、「事象検出加重」と呼ばれる値の形で各フレームに取得される。前記値は、信用レベルの高低を示す簡単なはい/いいえの選択、信用レベルの範囲を示す数字、または証拠を伝達する情報の任意の項目のことがある。このような数の一例は、ファジー論理値と呼ばれるもので、詳細は後述される。画像から完璧な決定を下すことができる機械はないので、不完全な証拠を基本にして決定することになる。
【0049】
事象検出加重は、フレームの1つ以上の対象領域上の画像分析演算により、各フレームに対して取得される。例示的実施形態では、各画像分析演算は、対象領域のピクセル値を基本にして測定を計算するが、測定は領域の光量、パターン、またはその他の特徴に対応する。測定は、閾値演算により論理値に変換され、対象領域から取得された論理値は、フレームの事象検出加重を計算するために組み合わされる。論理値は、バイナリまたはファジー論理値で、閾値と論理の組み合わせは必要に応じてバイナリまたはファジーである。
【0050】
例示的実施例では、以下の場合の事象フレームは連続フレームのセットである。
・セットの最初と最後のフレームの事象検出加重が閾値を超える場合。
・最後のフレームの後に、事象検出加重が閾値を超えないフレームが少なくとも一部の決定済みの個数だけある場合。
・フレームセットの事象検出加重が一部の決定済み条件を満足する場合。
【0051】
この目的のために、任意の適切な条件を定義してもよいが、条件は下記のものに限定される:
・セットにあるフレームの個数、
・平均事象検出加重、
・事象検出加重合計、
・事象検出加重の中央値、
・事象検出加重が閾値を超える、セットにあるフレームの個数またはフレームの割合。
【0052】
本発明により記録されるフレームは、取得された時間でスタンプされることが望ましい。事象の詳細調査を可能にするために、タイムスタンプは、例えば、時刻ではなく、事象自体の発生時間に相対的にタイムスタンプすることが最も有用である。事象フレームは事象の全体的な時間範囲を定義するが、特定時間は定義しない。事象の特定の有効な時間を取得するには、視覚検出器の方法と装置で開示されたようにマークタイプを使用することがある。開示されているように、記録時間は、物体が一部の架空の固定基準点を交差する時間であり、開示に従い正確に計算できる。
【0053】
しかしながら、すべての事象が基準点を交差する物体に対応するわけではない。例えば、事象は、視野で機械構成要素が前後に移動するストローク動作に対応することがある。このような場合、記録時間は、通常、基準点の交差ではなく、ストロークの頂点として定義することがより有用になる。基準点の周囲の動作は、フロー事象と呼ばれ、前後の動作はストローク事象と呼ばれる。本発明は、フローとストローク事象のいずれかを選択するための方法およびシステム、および、ストローク事象の記録時間を計算するための方法およびシステムを含む(フロー事象のための記録時間は視覚検出器の方法と装置で開示された)。
【0054】
本発明による事象検出は、視覚検出器の方法と装置で開示された視覚事象検出の例であり、「視覚事象検出の方法は連続したフレームの取得と事象が発生するまたは発生した証拠を決定するための各フレームの分析に関与する」と説明される。本明細書で開示されるように、視覚事象検出は、主に、検出される事象が視野を通過する別々の物体に対応して、一般的に物体を点検することが好ましい実施例に対して向けられる。読み手は、本明細書に開示される物体検出加重と物体通過スコア、および、本発明で使用される事象検出加重の間に非常な類似性があることに気づくであろう。確かに、物体検出加重または物体通過スコアを取得するために本明細書に開示された任意の方法または装置は、事象検出加重を取得するために使用できる。唯一の違いは、これらの加重やスコアが取得されるやり方ではなく、使用される目的である。
【0055】
さらに、物体が視野を通過したことを検出、またはさらに具体的には、不良物体が視野を通過したことを検出することは、本発明に従い事象を検出、記録および検索するために望ましいことがある事象の例である。確かに、視野を通過する物体を検出することと、上記の例のように誤差範囲に入る機械構成要素を検出することにはほとんど違いはない。このように、視覚検出器の方法と装置の開示は、一般的に本発明の例示的実施形態と考えることができ、記録および検索方法およびシステム、および改善された事象検出方法およびシステムは本明細書の開示により追加される。
【0056】
本発明は、添付の図面と併せて詳細な説明を読むことで明らかになるであろう。
【図面の簡単な説明】
【0057】
【図1】本発明による視覚事象の検出、記録および検索のためのシステムの説明的実施例を示す。この場合、事象は製造ラインを移動する物体の不良ラベルの適用に相当する。
【図2】本発明による事象を検出するシステムのための典型的な操作サイクルを説明するタイムラインを示す。
【図3】例示的実施形態により実施される分析手順を説明するフローチャートを示す。
【図4】例示的実施形態において、視覚事象検出のために証拠がどのように加重されるかを示す。
【図5】例示的実施形態において事象検出のために収集されて使用されるデータを示す。
【図6】本発明によるシステムの概要図を示す。
【図7】本発明によるシステムの一部として使用できるビジョン検出器の説明的実施例のブロック図を示す。
【図8】例示的実施形態において、物体が存在するかどうか、検査に合格するかどうかの判断など、証拠を加重して決定するために使用されるファジー論理要素を示す。
【図9】例示的実施形態により、フレームを分析し、決定し、入力を感知し、出力信号を制御するために使用されるソフトウェア要素(例えば、コンピュータ読み込み可能媒体のプログラム命令)のセットの組織を示す。
【図10】視覚事象検出の例示的実施形態をさらに説明するために使用される、事象検出パラメータのユーザー設定のためのHMI部分を示す。
【図11】ある物体例に誤って適用されたラベルを検出するために使用されることがある、ビジョン検出器の設定例の一部を示す。
【図12】図11の例のセットアップに対応する設定の別の部分を示す。
【図13】ラベル適用アームに対して誤った位置にある物体例を検出するために使用されることがある、ビジョン検出器の設定例の一部を示す。
【図14】図13のセットアップ例に対応する設定の別の部分を示す。
【図15】製造サイクルで、伸び不足または伸び過ぎのラベル適用アームを検出するために使用されることがある、ビジョン検出器の設定例の一部を示す。
【図16】図15のセットアップ例の伸び不足または伸び過ぎのアームを検出するためにどのように証拠を加重するかを示す。
【図17】連続ウェブの欠陥に対応する事象を検出するために本発明を設定する1つの方法を示す。
【図18】出力信号を事象の発生時間にどのように同期するかを説明するために使用されるタイミング図を示す。
【図19】ストローク事象の場合に記録時間がどのように計算されるかを示す。
【図20】出力信号のユーザー設定のためのHMIの部分を示す。
【図21】検出された事象の画像を記録するためのメモリ配列を示す。
【図22】映写スライドウィンドウと画像表示ウィンドウを含み、事象に対応して記録され検索された画像を表示するグラフィカルユーザーインターフェイスの一部を示す。
【発明を実施するための形態】
【0058】
[本発明の基本動作]
図1は、生産ラインで発生することがある一定の事象を検出して、事象の画像を記録および検索するように設定されるビジョン検出器の例示的実施形態を示す。コンベア1 00は、物体例110、112、114、116および118などの物体を運搬し、物体112のラベル120のように、各物体にラベルを貼る動作をするラベル貼り機械160を左から右に通過する。ラベル貼り機械160は、各ラベルを各物体に貼り付けるように動作する運動アーム162を含む。ラベル貼り機械160とアーム16 2は、本発明を説明する目的で示されており、必ずしも工業生産においてラベルを貼るために使用される任意の特定の機械を示すものではない。
【0059】
ラベル貼り機械160は、ときには誤動作することがあり、例えば、物体116の表面で右下角が曲がっているように、誤って貼られたラベル122が発生する。多くの工業生産ラインは、光検出器、マシンビジョンシステム、またはビジョン検出器のように、不良品116を検出して不合格にするために、ある形式の自動光電気検出を使用する。このような検査は、不良品が消費者に届けられることを防ぐことにおいて価値があるが、そもそも不良品が製造されることを防ぐためには役立たない。本発明の1つの目的は、不良品が実際に作成されていることを示す画像を提供することにより、製造技術者が不良品の原因を診断して修正することを支援することである。
【0060】
コンベア100は、物体を製造目的で運搬することに加えて、物体とビジョン検出器130の視野の間に相対的運動を発生させる。ほとんどの製造ラインでは、コンベアの動きは、ビジョン検出器130により受信でき、視覚検出器の方法と装置および本明細書で開示されるさまざまな目的で使用される、信号140を発生するシャフトエンコーダ132により追跡される。例えば、信号140は、ビジョン検出器130により、記録点と呼ばれる、物体112が架空の基準点150を交差する時点への基準として使用できる。
【0061】
ビジョン検出器130は、適切な視覚条件を基本にして、視野において発生することがある一定の事象を検出する。図1の例示的実施形態では、事象は、アーム162によりラベルを誤って貼ることに相当し、以下でさらに説明されるようにさまざまなやり方で検出できる。画像は、事象前、事象中、および事象後に記録される。製造技術者のような人間のユーザーは、ラベルが誤って貼られてしまう機械の問題を診断できるように、記録された画像を検索するために、信号142を経由して、ヒト−マシンインターフェイス134と相互にやり取りする。
【0062】
別の実施例では、ビジョン検出器を通過するのは、個別の物体ではなく、材料が連続して流れる。例えば、ウェブ上には、以下に提供される例がある。事象検出、記録および検索の目的では、個別の物体と材料の連続した流れではほとんど違いはない。
【0063】
図2は、事象を検出して画像を記録するように構成されるビジョン検出器の典型的な操作サイクルを説明するタイムラインを示す。ボックス220のような「c」のラベルが付けられたボックスは、画像の取得を表す。ボックス230のような「a」のラベルが付けられたボックスは分析を表す(分析ステップは以下でさらに分割され説明される)。例えば、分析ステップ230が取得ステップ220で取得される画像を分析するように、次の画像の取得「c」が現在の画像の分析「a」とオーバーラップすることが好ましい。このタイムラインでは、分析にかかる時間は、取得より短いように示されているが、一般的に、アプリケーションの詳細により、分析にかかる時間は取得より短いことも長いこともある。
【0064】
取得と分析が重複していれば、ビジョン検出器が画像を分析して分析する速度は、取得時間と分析時間のうち長くかかる時間により決定される。これが「フレームレート」である。
【0065】
タイムラインの部分220は第一の事象に相当し、5個の事象フレームの取得と分析を含む。第二の部分202は、第二の事象に相当し、3つの事象フレームを含む。
【0066】
本明細書に記載する例示的実施形態において、事象検出のための取得画像の分析は、次のような3つの主な下位ステップを含む。
・ある1つのフレームにおいて事象が発生している、または発生したことを示す証拠を評価するための視覚分析ステップ
・検出される事象が発生している可能性のある、「候補フレーム」と呼ばれる連続したフレームのセットを識別するためのアクティビティ分析ステップ
・検出される事象が候補フレームのセットで発生したかどうかを決定するための事象分析ステップ。
【0067】
各視覚分析ステップは、個別のフレームで事象が発生していることを示す証拠を検討する。証拠が明らかなフレームは「アクティブ」と呼ばれる。アクティブフレームの分析ステップは、例えば、分析ステップ240のように、太い枠線で示される。本明細書で検討される例示的実施形態において、この証拠は、以下および視覚検出器の方法と装置において開示されたように、フレームの1個以上の対象領域の画像分析演算により計算される、事象検出加重(以下でさらに説明される)と呼ばれるファジー論理値により表される。
【0068】
各アクティビティ分析ステップは、直近のフレームセット内で事象が発生しているまたは発生したことを示す証拠を検討する。本明細書で検討される例示的実施形態においては、事象検出は、事象が発生していることを示すなんらかの証拠があるということが明らかな「アクティブ状態」、またはそのような証拠はほとんどないことを示す「非アクティブ状態」にあることが検討される。アクティビティステップの1つの機能は、この状態を決定することである。例示的実施形態において、非アクティブ状態からアクティブ状態への移行は、アクティブフレームが発見されるときに行われる。アクティブ状態から非アクティブ状態への移行は、ある数の連続的な非アクティブフレームが発見されるときに行われる。候補フレームは、最初のアクティブフレームから始まり、最後のアクティブフレームで終わる連続的なフレームのセットを含み、その間に非アクティブなフレームを含む場合がある。アクティビティ分析ステップの別の機能は、候補フレームのセットを記述するデータを収集することである。
【0069】
その後、各事象分析ステップは、先行のアクティビティ分析ステップにより収集された証拠を確認することにより、候補フレームの間に事象が発生したことを示す証拠を検討する。本明細書で検討される例示的実施形態では、アクティブ状態から非アクティブ状態への移行が行われるたびに、事象分析ステップが実施される。候補フレームを記述するデータが確認され、事象が発生したと結論付けるに十分な証拠が明らかになれば、候補フレームは事象フレームと見なされる。記録およびその他の適切なアクションが、後述のように実施される。
【0070】
本発明の範囲内では、視覚、アクティビティ、および事象分析を実施するために、さまざまな方法が使用される。一部は以下および視覚検出器の方法と装置で説明されるが、その他の多くは当業者に明らかである。
【0071】
図2の例では、第一の事象200の事象検出は、分析ステップ240に対応する第一のアクティブなフレームでアクティブ状態に入り、分析ステップ246と248に対応する2つの連続する非アクティブフレームで終わる。分析ステップ242に対応する第一の事象である単独の非アクティブフレームは、非アクティブ状態に入るには十分ではない。
【0072】
非アクティブ状態に入るとき、例えば、分析ステップ248の終わりで、事象分析ステップが実施される。候補フレームは、分析ステップ240で始まり、分析ステップ241で終わる5個の事象フレームである。この例では、事象分析ステップは、事象が発生したという結果を出しており、第一番目のセットの記録フレーム210の記録を生じさせる。第二番目の事象202の同様な分析の結果、第二番目のセットの記録フレーム212を記録する。
【0073】
以下で説明されるように、視野を通過するときのアクティブフレームの物体の位置を検討することにより、ビジョン検出器は、事象が発生した正確な時間を表す記録時間250と252を推算する。タイムスタンプは、それぞれの記録されたフレームのために保管され、記録時間とこのようなそれぞれの記録されたフレームに対応するシャッタータイムの間の相対時間を示す。
【0074】
非アクティブ状態への移行が行われると、ビジョン検出器は、例えば、第一のアイドルステップ260と第二のアイドルステップ262のような、アイドルステップに入ることがある。このようなステップはオプションであるが、いくつかの理由により好ましいことがある。事象間の最低時間が知られている場合は、新しい事象が発生し得る直前まで、事象を探す必要はない。アイドルステップは、事象が発生できないときに、誤った事象検出の機会を削除し、アイドルステップの間、ライトをオフにできるので、照明システムの寿命を延ばすことになる。
【0075】
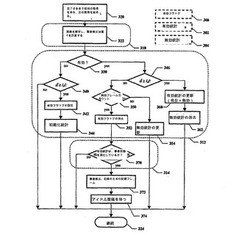
図3は、事象検出の分析ステップの詳細を提供するフローチャートを示す。破線枠のボックスは、フローチャートにより使用されるデータを表す。フローチャートブロックを囲む角が丸い四角は、視覚分析ステップ310、アクティビティ分析ステップ312および事象分析314などの分析の区画を示す。
【0076】
アクティブフラグ300は、アクティビティ分析ステップにより使用されるアクティブ/非アクティブ状態を保存する。アクティビティ分析ステップにより収集されたデータは、アクティブデータ302と非アクティブデータ304に保存される。アクティブフレームの値は、アクティブデータ302に直接追加される。非アクティブフレームの場合は、アクティブ分析ステップは、フレームが候補フレームのセットの一部であるかどうかは、後のフレームの状態によるので、まだ不明である。このため、非アクティブフレームの値は非アクティブデータ304に追加される。非アクティブ状態への移行が行われる前にアクティブフレームが続いて発見されれば、非アクティブデータ304はアクティブデータ302に追加されて、クリアされる。非アクティブ状態への移行の時点で残っている非アクティブデータ304は、廃棄される。両方のデータは、追加されたフレームの個数を含む。
【0077】
図3の例示的実施形態では、フローチャートは、各フレームで一度、取得ブロック320から連続ブロック324まで、何度も実行される。取得ブロック320は、フレーム取得により分析を同期化して、次のフレームの取得を現在のフレームの分析と重複させる。視覚分析ブロック322は、視覚分析ステップを実施し、取得された画像の分析から、事象検出加重dを計算する。
【0078】
次に、アクティビティ分析ステップ312が実施される。アクティブブロック330は、アクティブフラグ300をテストして、事象検出の現在の状態を決定する。事象検出が非アクティブであれば、第一の閾値ブロック340は、閾値tdに対してdを比較することにより、現在のフレームのアクティブ/非アクティブ状況を決定する。事象検出加重dが閾値tdより大きくなければ、フレームは非アクティブで、アクティブ分析は現在のフレームで終了する。事象検出加重dが閾値tdより大きければ、フレームはアクティブで、アクティブ移行ブロック342はアクティブフラグ300を設定し、初期化ブロック344は、現在のフレームの値を使用してアクティブデータ302を初期化し、非アクティブデータ304をクリアする。
【0079】
アクティブブロック330が現在の状態がアクティブであると決定すれば、第二の閾値ブロック346が、dを閾値tdに比較することにより、現在のフレームのアクティブ/非アクティブ状態を決定する。dが閾値より大きくなければ、フレームは非アクティブであり、カウントテストブロック350は非アクティブデータ304のフレームカウントを参照して、連続の非アクティブフレームのパラメータk以上が発見されたかどうかを決定する。発見されていなければ、非アクティブ更新ブロック354は、現在のフレームからの値を追加することにより(フレームカウントを1つ大きくすることも含む)、非アクティブデータ304を更新する。発見されていれば、非アクティブ移行ブロック352はアクティブフラグ300をクリアして、実行は事象分析ステップ314に続く。
【0080】
第二の閾値ブロック346が、現在のフレームがアクティブであると決定すれば、アクティブ更新ブロック360は、現在のフレームと非アクティブデータ304両方からの値を追加することにより、アクティブデータ302を更新する。そして、クリアブロック362は、非アクティブデータ304をクリアする。
【0081】
アクティビティ分析ステップ312が、アクティブ状態から非アクティブ状態への移行を行えば、事象分析ステップ314が実施される。条件ブロック370は、アクティブデータ302をテストして、事象が発生したかどうかを決定する。発生していなければ、収集データは無視されて、実行が継続する。発生していれば、事象ブロック372は、以下でさらに説明するように、記録のためのフレームを記録する。アイドルブロック374は、継続前のアイドル間、待機する。
【0082】
図4は、例示的実施形態の分析ステップをさらに説明しており、本発明の基本的操作を理解するために、図2のタイムラインと図3のフローチャートと合わせて使用する。
【0083】
図4は、例示的実施形態において、事象検出のために証拠がどのように加重されるかを説明する。上記のように、視野において事象が発生している、または発生したことを示す証拠を構成する情報は、「事象検出加重」と呼ばれる。図は、縦軸400の事象検出加重diと水平軸402のフレームカウントiの座標を示す。各フレームは、直線426のような縦線により表される。フレームカウントは、任意の整数である。
【0084】
この実施例では、diは、事象がフレームiで発生していることを示す証拠を表すファジー論理値であり、以下でさらに説明され、視覚検出器の方法と装置で説明された方法を使用して、各フレームのビジョン検出器により計算される。
【0085】
図4の例示的実施形態では、事象検出閾値tdは、0.5であるので、diが0.5以上であるフレームはアクティブフレームと見なされる。参考のため、di=0.5の線430が描かれた。アクティブフレームの事象検出加重は、点410のように、黒丸として描かれ、非アクティブフレームの事象検出加重は、点416のように、白丸として描かれる。
【0086】
図4の例では、事象検出は、フレーム422でアクティブ状態に入り、4つの連続した非アクティブフレームが見られる(この例では、非アクティブフレームカウント閾値k=3)フレーム424の後、非アクティブ状態に入る。候補フレームのセットは、フレーム422で始まり、フレーム426で終わる。隔離された非アクティブフレーム420は、非アクティブ状態への移行を発生させない。
【0087】
図5は、例示的実施形態において、アクティビティ分析ステップ312により収集され、事象分析ステップ314により使用されるデータの詳細を示すとともに、図4の例も示す。この実施例の場合、アクティブデータ302と非アクティブデータ304は、非アクティブ状態への移行がおこなわれるとき、これらのデータを計算するために十分な情報を含む。図5のそれぞれのデータは、記号500、以下でさらに説明される、値を定義する機能の記述510、および、図4の例の値が何であるかを示す例520を含む。
【0088】
事象が検出されたかどうかを決定するための証拠を加重するための方法の上記の説明は、有用な実施例の一例として意図されているが、本発明の範囲内で使用できる方法に限定されない。例えば、上記で使用された例の定数td=0.5は、任意の適した値で置換されることがある。当業者により視覚事象検出の多くの方法が追加される。
【0089】
[装置の例]
図6は、事象の視覚検出、記録、検索に使われる視覚検出器のためのハイレベル・ブロック図を示す。視覚検出器600は、適切な自動機器610に接続されることができ、そして、それは、信号620を用いて、PLC、拒否作動装置、回転符号器、および/または光検出器を含むことができる。これらの接続は、事象の検出、記録、検索の必要はないが、たとえば、視覚検出の方法と装置で教授された、追加の目的のために視覚検出器を使うことが好ましい事例に役に立つことができる。たとえば、事象が検出されたことを示すのに出力パルスを供給するのに特に好ましい場足がある。たとえば、パルスは、視覚検出器の方法と装置に教授されたように、記録時間に遅滞し、同期化し、PLC、作動装置、または、他の装置によって使われる。
【0090】
検出された事象の画像表示の検索のために、視覚検出器は、信号640を用いて、PCや携帯装置のような、ヒューマン・マシン・インターフェイス(HMI)630に接続する。HMI630は、また、設定として使われる。HMI630は、事象の検出と記録のために接続しないようにする必要があるが、もちろん、検索や表示のためには接続しなければならない。信号640は、条件に合ったフォーマット、および/ または、プロトコルで、実行され、有線または無線型で変換することができる。
【0091】
視覚検出器600により記録された事象画像は、また、自動画像分析システム650 により検索され、従来の機械視覚システムを含むが、それらに限定されない。このようなシステムは、HMI630の使用に固有の人間の分析を必要なしに、超高フレームレートで操作するために設計された視覚検出器で可能であり、更に画像の最新分析するために使われ得る。
【0092】
図7は、本発明の実行に使用できる視覚検出器の実例となる具体例のブロック図を示す。デジタル・シグナル・プロセッサ(DSP)700は、取得、分析、記録、HMI交信、視覚検出器により必要とされるいくつかの適切な機能を制御するためのソフトウェアを起動する。DSP700は、電源が取り除かれた場合、プログラムと設定情報を保持するためのプログラム、データ、および、不揮発性メモリのための高速ランダムアクセスメモリを含む、メモリ710に接続される。また、メモリ710は、それに続く検索のための記録画像を保持する。DSPは、また、自動機器、HMIインターフェイス730、照明モジュール740、撮像装置760への信号を供給するI/Oモジュール720に接続されている。レンズ750は、撮像装置760の光に敏感な要素へ画像を焦点を合わせている。
【0093】
DSP700は、デジタル計算、情報保存、ほかのデジタル要素に接続ができる装置であり、汎用コンピュータ、PLC、または、マイクロプロセッサを含むが、それらに限定されない。DSP700は、安価であるが、高フレームレートを操作するには十分な速さがあるので、好ましい。画像分析を持ち、同時に撮像装置からピクセルデータを受取り、保存ができるので、更に好ましい。
【0094】
図7の実例となる具体例では、DSP700は、マサチューセッツ州のマサチューセッツ州のノーウッドのAnalog Devicesで生産された、ADSP−BF531である。ADSP−BF531DSP700の並列周辺インターフェイス(PPI)770は、撮像装置760からのピクセルデータを受取り、メモリ710の保存のためのダイレクトメモリアクセス(DMA)チャンネル772を通して、メモリ・コントローラー774へデータを送る。適切なソフトウェア制御の下で、PPI770とDMA772の使用は、DSP700により実行されたその他の分析で同時に画像取得させる。PPI770とDMA772で制御するためのソフトウェア命令は、ADSP−BF533 Blackfin Processor Hardware Reference(品番82−002005−01)とBlackfin Processor Instruction Set Reference(品番82−000410−14)に含まれる、プログラム取扱い説明書に従い、当業者により実行され、ここにある双方を参照することにより組み込まれる。ここで留意すべきは、ADSP−BF531、競合のADSP−BF532とADSP−BF533の装置が、同一のプログラム取扱い説明書を持っていて、適切な価格/実行取引を得るためにこの実例となる具体例で交互に用いられることである。
【0095】
視覚検出器による好ましい高フレームレートは、従来の技術の視覚システムで使われている撮像装置でない、撮像装置の使用を勧めている。撮像装置は、高価でない照明を用い、非常に短いシャッター時間で、操作できるように、異常に光に敏感であることが好ましい。従来の技術視覚システムよりも更に速いDSPでのピクセルデータのデジタル化、転送することができることが更に好ましい。それが、高価でなく、グローバルシャッターを持っていることがなお好ましい。
【0096】
これらの物体は、従来の技術の視覚システムで使われた撮像装置よりも、さらに高い感光性で、低い解像度を持つ撮像装置を選ぶことにより、対応することができる。図7の実例となる具体例では、撮像装置760は、カリフォルニア州サンタクララのナショナル・セミコンダクターにより製造されたLM9630である。LM9630は、典型的な従来の技術システムよりも約24倍少ない、128×100個、総計で12800個のピクセルの配列を持っている。ピクセルは、それぞれ、高い光感受性を持つ、20平方ミクロンの広さである。LM9630は、300マイクロ秒のシャッター時間でのセットが、LED照明を用い、300マイクロ秒にさせるために十分(ほとんどの場合)敏感である場合、毎秒500フレームを供給できる。この解像度は、視覚システムにははるかに低すぎると考えられるが、視覚検出器の方法と装置の物体である検出の特徴には十分である。LM9630の電気的インターフェイスとソフトウェア制御は、2004年の1月のRev 1.0のLM9630データシートに含まれる取扱い説明書に従い、当業者により実行され、それは、ここにある双方を参照することにより組み込まれる。
【0097】
照明740は、高価でないが、短くシャッター時間をするのに十分な明るさがあることが好ましい。実例となる具体例では、630ナノメートルで動作している高輝度の赤いLEDの列は、たとえば、Agilent Technologiesにより製造されたHLMP−ED25を使用している。もう一つの具体例では、高輝度の白いLEDは、好ましい照明を実行するのに使われている。
【0098】
図7の実例となる具体例では、I/Oモジュール720は、出力信号722と724、入力信号726を供給する。入力信号726は、視覚検出器の方法と装置で教授されたように、論理的な観点で適切な接続により、事象検出のために使われる。
【0099】
次の用語の画像取得装置は、デジタル画像を取得し、保存することを意味する。図7 の実例となる具体例では、画像取得装置780は、DSP700、撮像装置760、メモリ710と、関連した電気的インターフェイスとソフトウェア命令を備える。
【0100】
次の用語の分析器は、デジタル画像に限定されないものを含む、デジタルデータの分析の手段を供給する。図7の実例となる具体例では、分析器は、DSP700、メモリ710と、関連した電気的インターフェイスとソフトウェア命令を備える。
【0101】
次の用語の出力信号器は、分析器に応対する出力信号を生産するための手段を供給する。図7の実例となる具体例では、出力信号器784は、I/Oモジュール720と出力信号器722を備える。
【0102】
次の用語の処理は、いくつかの目的を対象にし、好ましい装置により実行された動作の組織的なセットに参照され、メカニズム、装置、部品、ソフトウェア、または、ファームウェア、対象とする動作を実行するために一つの場所またはいろいろな場所で連携するいかなる合成を含むが、それらに限定されない。
【0103】
実例となる具体例では、本発明で使われている様々な処理は、デジタルハードウェア要素とコンピュータソフトウェア命令の相互作用の収集により実行される。ハードウェア要素には例えば下記のようなものがある。
・好ましいコンピュータソフトウェア命令の制御の下で、汎用情報処理動作を行うDSP700
・画像、データ、コンピュータソフトウェア命令のための保存と検索動作を供給するメモリ710
・本明細書で説明する画像取得動作のような、ほかの要素と組み合わせて供給する撮像装置760
・インターフェイスと信号動作を供給するI/Oモジュール720
・ヒューマン・マシン・インターフェイスとして機能するHMIインターフェイス730。
【0104】
一実施形態において、本明細書に記載する動作を実施するためのコンピュータソフトウェア命令には例えば、下記のようなソフトウェア命令がある。
・実例となる取得と分析処理の部分を説明する、図3のフローチャートステップ
・実例となる決定論理を説明する図8のファジー論理要素
・発明を実行するのに使われるソフトウェア要素のセットを示す図9のソフトウェア要素
・いかに人間のユーザーが操作するパラメータを選択できるかを示す図10と20のグラフィカル制御。
【0105】
更に、上記に示したものは、例の一覧のみであることは、当業者により、理解されるであろう。それは、完全ではなく、好ましいコンピュータソフトウェア命令は、ここに説明されたいかなる図のために使われた処理を実行するために実例となる具体例で使われ得る。
【0106】
本明細書に記載する処理の例には、次のようなものがある。
・画像取得装置780によって実行される、取得ブロック320(図3)や本明細書に記載されているような他の動作を含む獲得処理
・図9に示されている分析器782及び好ましいソフトウェア要素により実行される、図3の部分や、視覚分析ステップ310、活動分析ステップ312、及び事象分析ステップ314のような本明細書に記載される他の動作を含む種々の分析処理
・図9に示されている分析器782及び適当なソフトウェア要素により実行される、事象ブロック372や本明細書に記載される他の動作を含む種々の選択処理
・図9に示されている分析器782及び適当なソフトウェア要素により実行される、条件ブロック370及び本明細書に記載された他の動作を含む種々の判断処理。
【0107】
当業者には明らかなように、画像取得装置780、分析器782、出力信号器784を実施するために本発明の範囲内で使用可能な、多数の代替の構成、装置、ソフトウェア命令が存在する。同様に、本明細書に記載の処理を実施するために本発明の範囲内で使用可能な多数のソフトウェア命令が存在する。
【0108】
[ファジー論理意思決定]
図8は、事象が起こっているかどうか、または、起こったかどうかを判断することを含む、証拠を検討し、判断するために、具体例で使われるファジー論理要素を示す。
【0109】
ファジー論理値は、ある特定の状態が真であるという信頼度の推定値を示す0〜1の間の数である。1の数値は、状態が真である信頼度が高いことを示し、0は状態が偽であるという高い信頼度を示し、中間値は、信頼の中間レベルを示す。
【0110】
もっと馴染みのあるニ値論理は、信頼値は、0から1に制限される、ファジー論理のサブセットである。ゆえに、ファジー論理を使うここに記載した具体例は、同等のニ値論理方法または装置で置換されるこれらの値を使い、ファジー論理方法または装置で、別のニ値論理値として使うことができる。
【0111】
ニ値論理値は、閾値を使うことにより、原測定値から得られるものであるように、ファジー論理値は、ファジー閾値を使うことにより得られる。図8を参照すると、グラフ800は、ファジー閾値を示す。X軸810は、原測定を示し、f軸814は、ファジー論理値を示し、そのxの範囲は、全ての可能な原測定で、fの値域は、0≦f≦1である機能である。
【0112】
実例となる具体例では、ファジー閾値は、機能824と826上の点に対応して、x軸、低閾値t0820、高閾値t1822で示される、2つの数を備える。ファジー閾値は、次の式で、定義することができる。
【0113】
【数1】

【0114】
ここで留意すべきは、この機能が、t1<t0である場合、よく機能することである。他の機能は、また、シグモイドのような、ファジー閾値として使うことができる。
【0115】
【数2】
【0116】
ここで、tとσは、閾値パラメータである。簡素であることが目標である具体例では、従来型ニ値閾値は、ニ値論理値を結果として、使うことができる。
【0117】
ファジー意思決定は、AND840、OR850、NOT860のファジーバージョンに基づいている。2つまたはそれ以上のファジー論理値のファジーANDは、最小値であり、ファジーORは、最大値である。fのファジーNOTは、1−fである。ファジー論理値が0か1に制限されている場合、ファジー論理値は、二進論理値に等しい。
【0118】
実例となる具体例では、真偽の決定が必要である時はいつでも、ファジー論理値は、それが少なくとも0.5である場合は、真として見なされ、0.5以下であれば、偽であると考えられる。
【0119】
当業者には明らかなように、本明細書に記載するファジー論理に関係して使用されるような値0および1に関し、臨界は存在しない。信頼の中間レベルを示す中間値として用い、いかなる数が、状態が真であることを高信頼を示すのに使い、それとは違う数が状態を偽であることを高信頼を示すのに使うことができる。
【0120】
[本発明のソフトウェア要素]
図9は、フレーム分析、判断、入力感知、および出力信号調節のために、具体例により使用される一連のソフトウェア要素の編成(例えば、コンピュータ可読媒体のプログラムインストラクション)を示す。各要素がそれぞれクラスに対応するように、C+ +等従来のオブジェクト指向プログラミング言語のクラス階層を使用して要素が実行されてもよい。しかしながら、ここで記載されるプロセスを実行するには、基準を満たすいかなるプログラミング技術および/または言語をも使用することができる。
【0121】
図示のように、ガジェットクラス900のように点線の境界線付きのクラスは、独立しては存在せず、ロケータクラス920のような具体派生クラスを構築するのに使用される抽象基本クラスである。実線で境界されたクラスは、ユーザーがアプリケーションを設定する必要がある時に、HMI630を使用して作成および破壊することができる動的オブジェクトを表す。入力950などの破線で境界されたクラスは、特定のハードウェアやソフトウェアリソースと関連する静的オブジェクトを表す。静的オブジェクトは常に存在するものであり、ユーザーによって作成または破壊されることは不可能である。
【0122】
すべてのクラスは、ガジェットクラス900から派生しているため、図9に示すクラスのインスタンスであるすべてのオブジェクトはガジェットの一種である。具体例においては、各ガジェットは、1.ユーザーが選択することのできる名前を有し、2.他のガジェットが判断および出力信号を制御するために、論理入力として使用することができる論理出力(ファジー理論値)を有し、3.ユーザーが操作を特定するために構成することができる一連のパラメータを有し、4.論理出力(すなわちファジーNOT)を反転するのに使用可能な、そのようなパラメータをひとつ有し、5.実行可能であり、そのパラメータ、該当する場合は論理入力、ある種のガジェットについては現行フレームのコンテンツに基づいて論理出力が更新され、また出力信号の設定のような副作用を引き起こすことがある。
【0123】
フレーム分析作業には、ガジェット実行前に、ガジェットへのすべての論理入力が更新されたことを保証するために確定された順序で、各ガジェットを一度実行することが含まれる。ある実施例においては、その論理出力が必要ではないフレームの間はガジェットが実行されない。
【0124】
写真クラス910は、論理出力が現行フレームのコンテンツに依存するすべてのガジェットの基本クラスである。これらのクラスは実際に画像分析を行うクラスである。各写真は現行フレームの関心領域(ROI)のある特徴を測定する。ROIは、検査される物体の可視機能に対応する。この測定は写真のアナログ出力と呼ばれる。写真の論理出力は、感度閾値と呼ばれる、ユーザーによって構成されることができる一連のパラメータ中に存在するファジー閾値を用いて、アナログ出力から計算される。写真の論理出力は、判断を下す際に使われる証拠を提供するのに使用可能である。
【0125】
検出器クラス930は、ROIにおける測定および判断を下す際の証拠を提供することを主目的とする写真の基本クラスである。具体例においては、すべての検出器ROIは円型である。円形のROIは、回転を処理する必要がないため実行を簡素化し、またROIの形が1つしかないことで、ユーザーが学習すべきことを簡素化する。検出器パラメータにはポジションおよびROIの直径が含まれる。
【0126】
輝度検出器940はROIにおける加重平均やパーセンタイル輝度を測定する。コントラスト検出器942はROIにおけるコントラストを測定する。エッジ検出器944は、特定方向において、ROIがエッジのように見える領域を測定する。スポット検出器946は、ROIが穴のような丸い特徴に見える領域を測定する。テンプレート検出器948は、ROIがユーザーが選択した、事前にトレインされたパターンのように見える領域を測定する。検出器の操作については、視覚検出器の方法および装置においてさらに記述する。
【0127】
ロケータクラス920は、2つの主目的を持つ写真を表す。1つ目は、判断を下す際の証拠を提供することが可能な論理出力を生成することであり、これにより、他のいかなる検出器のようにも使用することができる。2つ目は、視覚検出器の視野にあるオブジェクトの位置を決定することにより、他の写真のROIのポジションを、オブジェクトのポジションを追跡するように移動することができることである。どのロケータも、1つのまたは両方の目的に使用することができる。
【0128】
具体例においては、ロケータは、フレーム内における一次元領域でエッジを検索する。検索方向は、エッジに向かって垂直であり、ユーザーによって設定されるパラメータの中にある。ロケータのアナログ出力はエッジ検出器のアナログ出力と似ている。ロケータについては視覚検出器の方法および装置においてさらに記載される。
【0129】
他の実施形態において、ロケータは、転換、回転、および、自由度のサイズを含む既知の方法を用いて、多次元検索範囲を検索する。適切な方法には、多年にわたり市販のものである既知の技術であるすべてである、正規化相関関係、汎用のハフ変換、幾何学模様補修に基づいたものを含む。多次元ロケータの具体例は、2004年11月2日に出願された、Brian Mirtich氏とWilliam M. Silver氏による、参照することにより本書にはっきりと組み込まれる教授法である、「製造ライン情報を用いた視覚検出器のパラメータの設定のための方法」と題する、同時係属の米国特許出願番号10/979,535に記載されている。
【0130】
入力クラス950は、事象検出に影響を与えるものとして使われる、視覚検出器に送られる入力信号を表す。出力クラス952は、事象が検出されるPLCまたは、作動装置を通知するために使われる可能性のあるような、視覚検出器からの出力信号を表す。実例となる具体例では、各物理的入力に対して、典型的入力信号726(図7)のような、入力クラスの静的インスタンスが1つ、および、各物理的出力に対して、典型的出力信号722および724のような、出力クラスの静的インスタンスが1つ存在する。視覚検出の方法と装置で教えられているように、外部自動装置は、事象が起こった場合、いつ、遅延時間を利用し、または、どこで、エンコーダカウントを用いるか、決定することができるので、出力は、記録時間を同期化する遅延パルスを形成することができる。
【0131】
ゲートベースクラス960はファジー論理の意思決定を実行する。各ゲートは、他のガジェットの論理出力に接続可能な論理入力を1つ以上有する。各論理入力は、ユーザーが設定可能なパラメータを用いて、反転(ファジーNOT)することが可能である。ANDゲート962は、ファジーAND操作を実行し、ORゲート964は、ファジーOR演算を実行する。
【0132】
判断クラス970は、意思決定するために連続フレーム上の証拠を検討するオブジェクトの基本クラスである。本発明の実例である具体例では、活動分析ステップ312 と事象分析ステップ314(視覚分析ステップ310は、下記に与えられた例に用いた、写真、入力、および/または、ゲートの合成により実行される)を実施する目的を持つ事象検出判断972を含む。判断のほかのタイプは、そこに与えられた機能と、ここに与えられたように事象検出を組み合わせるために好ましい具体例に存在することにより、視覚検出の方法と装置で教授されている。
【0133】
それぞれの判断は、ユーザーが写真、または、たいてい写真とほかのゲートである、ガジェットの論理結合を与える、さらに典型的なゲートの論理出力を接続するために論理入力を持つ。事象検出判断の論理入力は、各フレームに事象検出加重を与える。本発明の具体例は、下記に与えられた一例で、事象検出判断よりも使う可能性のあることが明らかに考えられる。
【0134】
事象検出判断の論理出力は、いつ事象が検出されたのかを示すパルスを提供する。パルス立ち上がりは、例えば図2の分析ステップ248の終了時などの、事象分析ステップ314が事象を検出する時に発生し、立ち下がりは、例えばアイドルステップ260の終了時などの後に発生する。
【0135】
図10は、事象検索判断のためのパラメータを設定するために、ユーザーが見て操作するようにHMIに表示されるグラフィカル制御を示す。ガジェットパラメータを設定するためのHMI630に表示されているグラフィカル制御のセットは、パラメータビューと称する。
【0136】
ネームテキストボックス1000は、ユーザーにこの事象検出判断のための名前の閲覧と入力を可能にする。時間表示1002は、この事象検出判断の最新起動でかかった時間を示す。論理出力ラベル1004は、この事象検出判断の現在の論理出力値を示し、真(≧0.5)と偽(<0.5)であるかを見分けるための色、形、または、ほかの指標に変えるかもしれない。反転チェックボックス1006は、反転させるためにこの事象検出判断の論理出力をさせる。ここで留意すべきは、ネームテキストボックス1000、時間表示1002、論理出力ラベル1004、反転チェックボックス1006は、視覚検出の方法と装置でさらに説明したように、全てのガジェットタイプのためのパラメータビューでは、一般的であることである。
【0137】
アイドルタイムスピナー1020は、アイドルステップ260(図2)や図3のアイドルブロック374で示されているように、ユーザーに時間間隔を特定させる。消失フレームスピナー1030は、無効状態へ転換させる活動分析ステップ312なしに受け入れる連続無効フレームの最大数をユーザーに特定させる。消失フレームスピナー1030により特定された値は、図3のカウントテストブロック350にあるパラメータkとして使われる。
【0138】
マーキング制御1040は、更に個々に説明されているように、記録時間を計算するためにフローとストローク事象間でユーザーに選択させる。記録時間を計算するために、ユーザーは、ロケータリストコントロール1042を使ってロケータを特定しなければならない。
【0139】
記録間隔制御1050は、事象が検出された場合、記録時間に関係して画像が記録された時間間隔をユーザーに特定させる。示されていない、代替実施例においては、ユーザーは、事象フレームが記録されたかどうか、事象フレームが記録される前後のフレーム数を特定する。
【0140】
状態テキスト1010は、状態ブロック370によりテストされ、事象が起こったかどうか決定するための事象分析ステップ314により使われた事象状態をユーザーに特定させる。図10の具体例では、状態テキスト1010は、Cのように従来のプログラミング言語により使われ、似ている構文で論理表現を示すテキスト文字列を含む。活動統計302からの真偽値の算出を特定するために、その表現は活動統計302の要素に表し、数値定数、論理、比較、算術演算子、丸括弧のような句読法を用いて、図5からシンボル500を組み合わせる。このようなテキスト文字列に基づいて真偽値を計算する方法は、既知の技術である。
【0141】
図10の実例となる例では、少なくとも2つの候補フレームがあり、平均事象検出加重は0.50以下または、0.75以上である場合、事象は起こる。このような状態が役立つ例は、下記で説明された図15と16に示されている。
【0142】
[具体例の有用な例]
図11は、いかに写真が不適用ラベル122(図1)のような、不適用ラベルを用いて、物体に対応する事象を検出するのに使われるかの例を示す。図11は図1より物体116に対応する、物体1100のイメージを表しており、ラベル機構1110とともに、写真を表す重畳グラフィックスを有し、それはユーザーが見て操作できるようにHMI630に表示される。HMI上での画像および重畳グラフィックスの表示は画像表示と呼ばれる。
【0143】
ロケータ1120は、物体の上端を検出して位置を確認するために使用され、別のロケータ1122は右端を検出して位置を確認するために使用される。輝度検出器1130は、物体の存在を検出する助けとなるように使用される。この例では、背景は物体より明るく、感度閾値が2つの明るさのレベルを区別するように設定されており、より明るい背景ではなく、より暗い物体を検出するために論理出力が反転されている。
【0144】
後にさらに記載されるように、ロケータ1120および1122、そして輝度検出器1130は、ともに物体が存在することを判断するのに必要な証拠提供する。明らかに、「不適用ラベルを持つ物体」に対応する事象は、事象が存在しない場合、起こらない。
【0145】
エッジ検出器1160は、ラベル1110の存在および位置を検出するのに使用される。ラベルが存在しなかったり、水平に間違った位置にあったり、著しく回転し、示されたような曲がったカマーがあり、または、さまざまなほかの方法で不適用になった場合は、エッジ検出器のアナログ出力は非常に低くなる。もちろん、ラベル1110が、エッジ検出器1160により検出されない、不適用であることが多々あるので、ほかの写真は、いかなる与えられた生産状況で故障を検出する必要があるときに使われる可能性がある。
【0146】
たとえば、輝度検出器1150は、正しいラベルが貼られたかどうかを確認するために使用される。この例では、正しいラベルは白であり、誤ったラベルは暗い色をしている。
【0147】
物体が視覚検出器の視野を通って左から右に移動すると、ロケータ1122が物体の右端を追跡し、物体に対して正しい位置になるよう、輝度検出器1130、輝度検出器1150、およびエッジ検出器1160を再配置する。ロケータ1120は、検出器を物体の上端の位置に基づいて再配置し、視野内の物体のいかなる垂直位置の変動をも修正する。一般的に、ロケータはどのような位置にでも配置することができる。
【0148】
ユーザーは、既知のHMI技術を使用して、画像表示内で写真の操作をすることができる。写真はマウスをクリックすることにより選択可能であり、またドラッグすることにより、そのROIは移動、サイズ変更、および回転が可能である。ロケータに関する付加的な操作は、視覚検出器の方法および装置で記載される。
【0149】
図12は、図11の設定例に対応する配線図を含む、論理ビューを示す。配線図は、自動装置への事象とインターフェイスを検出するのに使用されるすべてのガジェット、およびガジェットの論理入力・出力間の接続を示す。配線図は、ユーザーが見て操作するようにHMI630に表示される。ガジェットの表示およびそれらのHMIにおける論理的相互接続は論理ビューと呼ばれる。
【0150】
さらに図12の配線図について言及すると、「トップ」という名前のロケータ1220は、図11の画像表示内のロケータ1120に対応して、ワイヤー1224によりANDゲート1210に接続される。同様に、「サイド」ロケータ1222は、ロケータ1122に対応して、「ボックス」検出器1230は、輝度検出器1130に対応して、またANDゲート1210に配線される。小円1232で示されるように、および上記の通り、明るい背景に対してより暗い物体を検出するために、「ボックス」検出器1230は反転されている。
【0151】
配線図において、輝度検出器「ラベル」1250は輝度検出器1150に対応して、そしてエッジ検出器「ラベルエッジ」1260はエッジ検出器1160に対応して、ANDゲート1212に配線される。ANDゲート1212の論理出力は、ラベル1210が不適用であることを信頼性のレベルで表すように転換され、ANDゲート1210に配線される。
【0152】
ANDゲート1210の論理出力は、物体が存在することを信頼性のレベルで表し、そのレベル、すなわち、事象が起こる信頼性のレベルが不適用であることを表す。ANDゲート1210の論理出力は、各フレームに対する事象検出の加重として使用されるため、事象検出判断1200に配線される。多くの代替事象状態は、また、アプリケーションの状況により適切であるが、この構成で適切な事象検出判断1200の事象状態は、「n>=3 かつ m>=0.5」である。
【0153】
事象検出判断に配線するガジェットの選択は、アプリケーションの知識に基づきユーザーによって行われる。図11および12の例においては、ユーザーは上および右だけを検出するのでは、物体の存在を確認するのに分ではないと決定したかもしれない。ここで留意するべきなのは、ロケータ1122は、物体の右端に反応するのと同じように、ラベルの左端にも反応するかもしれないこと、そしておそらくこの時点で、プロダクションサイクルにおいて、ロケータ1120が背景で他のエッジを発見したかもしれないということである。検出器1130を加えること、またANDゲート1210を用いて3つすべての条件を満たすことで、事象の検出は信頼性の高いものになる。
【0154】
事象が検出された場合、画像は更に下記に説明されたように記録されるかもしれない。明らかに、事象フレームより前に時間に対応する画像は、いかにラベルが不適用であるかを正確に示す可能性が最も高い。視覚検出器がラベルが貼られる場所が実用的である限り近くで、物体を見ることができるように置くことがこの例では明らかに好ましい。
【0155】
事象検出判断1200の論理出力は、「シグナル」という名前の出力ガジェット1280に配線され、それは、PLCまたは、作動装置のような、自動装置に接続された場合、必要に応じて、視覚検出器から出力信号を制御する。出力ガジェット1280は、さらに視覚検出器の方法と装置に説明されたように、適切にユーザーにより構成される。自動装置は、事象が起こった場合、いつ、時間を利用し、どこで、エンコーダカウントを用いるか、決定することができるので、視覚検出器の方法と装置で教授されたように、出力ガジェット1280は、記録時間を同期化する遅延パルスを形成することができる。
【0156】
ユーザーは既知のHMI技術を使うことにより、論理ビュー内でガジェットを操作することができる。ガジェットはマウスをクリックすることにより選択可能であり、そのポジションはドラッグによって移動可能、そしてワイヤーはドラッグ・ドロップ操作により作成が可能である。
【0157】
当業者は、ガジェットの適切な選択、設定、および配線により、様々な事象が検出可能であるということを認識するであろう。当業者はまた、ガジェットクラス階層が本発明を実行するのに使われる多くのソフトウェア技術のなかの唯一のものであることを認識するであろう。
【0158】
図13は、図1で示される生産設定に有用である可能性のある事象を検出するための視覚検出器のもう一つの構成に対応する画像表示を示す。この例では、表示アーム162が十分に延長されたが(そのストロークの先端)、物体1300は、ラベル1310を受取るために不正確な配置である場合、事象が起こる。アームエッジ検出器1340は、表示アーム162のストロークの先端に対応して視野内の位置に配置される。ここで留意するのは、この位置が視野に関連するように固定され、それが、製造ラインで動かないので、ロケータを使用する必要がないことである。トップエッジ検出器1320とサイドエッジ検出器1330は、物体1300がストロークの先端で好ましい位置にあることを確認するために使われる。
【0159】
図14は、表示アーム162のストロークの先端で間違った位置に物体が対応して、事象を検出するために、図13の画像表示に対応してガジェットの構成を示す論理図である。「アーム」1440は、アームエッジ検出器1340に対応し、「トップ」1420はトップエッジ検出器1320に対応し、「サイド」1430は、サイドエッジ検出器1330に対応する。
【0160】
図14に示されるように、変換されたANDゲート1412と配線されたANDゲート1410を用いて、事象検出判断1400は、物体1300がアーム162がストロークの先端であるときに、トップエッジ検出器1320とサイドエッジ検出器1330の少なくとも一つにより特定された位置でないことを信頼性のレベルで表す事象検出加重を受取る。この構成の場合、適切な事象検出判断1400の事象状態は、「n>=2」である。
【0161】
事象が検出された場合、画像は更に下記に説明されたように記録されるかもしれない。さらに、事象検出判断1400の論理出力は、「シグナル」という名前の出力ガジェット1480に配線され、それは、PLCまたは、作動装置のような、自動装置に接続された場合、必要に応じて、視覚検出器から出力信号を制御する。出力ガジェット1280は、さらに視覚検出器の方法と装置に説明されたように、適切にユーザーにより構成される。
【0162】
図15は、図1で示される生産設定に有用である可能性のある事象を検出するための視覚検出器のさらにもう一つの構成を形成する画像表示と対応する論理表示を示す。この例では、表示アーム162事象が拡張されない、または、拡張しすぎる表示アーム162が、ストロークの先端が間違った場所にある場合、または、それが正しい位置に延長してあるが、正しいラベルアプリケーションのために短すぎたり長すぎたりしてそこにある場合、事象が起こる。
【0163】
過剰外延化は検出するのが易しい。エッジ検出器1512は、表示アーム162の下方ストロークの予期された先端の下に配置されている。対応する論理表示エッジ検出器「ハイパー」1540は、「ハイパー事象」事象検出判断1570に配線され、それは、拡張しすぎるアームを検出するために事象状態「w>=0.95」を使う可能性がある。ここに留意すべきは、総計事象検出加重wを使い、この事象状態は、そのフレームの事象検出加重がとても高い信頼性を示す場合、十分な証拠として単一フレームを受入れ、事象検出加重が低い信頼性を示す場合、少なくとも2つのフレームを必要とすることである。
【0164】
そのほかの状態では、ロケータ1500は、表示アーム162が先端付近の位置の範囲内であることを検出するために配置され、エッジ検出器1510は、表示アーム162が先端であることを検出するために配置される。対応する論理表示ロケータ「ストロ−ク」1520と反転したエッジ検出器「アペックス」1530は、ANDゲート1550に示されているように配線され、それは、事象検出判断「ストローク事象」1560に次々に配線される。この構成で事象検出加重は、表示アーム162が近くにあるが、そのストロークの先端ではないことを信頼性のレベルで表す。
【0165】
ここに留意すべきは、図15の論理表示は、2つの事象検出判断の使用を含むことである。判断のいずれかが十分な証拠を見つけた場合、事象は検出されるので、一つ以上の事象検出判断が使われた場合、それぞれは、独立して操作される。各判断は、活動フラッグ300、有効統計302、無効統計304のコピーを用い、それ自身の有効分析ステップ312と事象分析ステップ314を操作する。ここに留意すべきは、視覚分析ステップ310は、写真やゲートのようなほかのガジェットにより操作されることである。
【0166】
図16は、たとえば、図15の適切な構造である事象検出判断「ストローク事象」1560のために、いかに事象が明確に示されているかを示す。上記に説明された図4に示されるプロットに似ている事象検出加重di対フレームカウントIの4つのプロットが示されている。
【0167】
第一プロット1600は、拡張されていないアームを示す。アームは、約12のフレームで要求先端に近づくように動いたが、実際は先端に到達しなかった。第二プロット1610は、正しいラベルアプリケーションのために、要求先端に延長したが、唯一つだけフレームをそこに短すぎて残った、アームを示す。第三プロット1620 は、正しく延長され、要求先端に到達し、約3つのフレームのためにそこに残った、アームを示す。第四プロット1630は、長く延長され、要求先端に到達し、約7つのフレームのためにそこに残った、アームを示す。
【0168】
図10の事象状態「n>=2 かつ (a<.50|a>.75)」は、第一プロット1600、第二プロット1610、第四プロット1630の検出には適しているが、正しいアームの延長に対応する第三プロット1620では検出されない。「a<.50」の項は、第一プロット1600と第二プロット1610で検出される。「a>.75」の項は、第四プロット1630で検出される。「n>=2」の項は、単一フレームの偽の事象が検出されないことを約束する。
【0169】
明らかに、表示アーム162のような、機械機器の誤った延長を検出するのに好ましく、当業者に起こるであろう、多くのほかの構成と事象状態がある。図17は、継続のウェブ上に欠陥の画像を検出し、記録するための発明を構成する一つの方法を示す。画像表示1710は、視覚検出器を通過している継続ウェブ1700の一部を示す。
【0170】
ロケータ1720とエッジ検出器1722は、ウェブを検査するために構成されている。ウェブが壊れたり、折り重なったり、どちらかの端に実質的に擦り切れている場合、ロケータ1720、および/または、エッジ検出器1722は、偽の出力(論理値<0.5)を形成するであろう。ウェブが、上下に移動する場合、ロケータ1720は、トップエッジを追跡したり、下端を検出するために関連する右の位置にエッジ検出器1722を備え付けるだろう。しかし、ウェブの幅が実質的に変わる場合、エッジ検出器1722は、偽の出力を形成するだろう。
【0171】
論理表示では、「トップ」ロケータ1740は、ロケータ1720を表し、「ボトム」ロケータ1750は、エッジ検出器1722を表す。これらは、ANDゲート1760に接続され、その論理出力は、事象検出判断1770で反転され、配線される。
【0172】
[マーキング、ストローク事象、同期化出力]
図18は、ビジョン検出器の出力信号が記録時間とどのように同期化されることがあるかを説明するために使用するタイミング図を示す。信号の同期化は、ダウンストリーム作動装置の制御など、さまざまな工業検査の目的において望ましい。
【0173】
視覚事象検出は、新しい機能であるので、新しい出力信号制御を提案する。ビジョン検出器は、直接的に、または、PLCへの入力として機能することにより、一部の外部作動装置を制御できることが望ましい。これは、出力信号のタイミングが、物体が生産フローにおいて特定の固定点を通過するとき(フロー事象)、または、機械構成要素がストロークの頂点に到達するとき(ストローク事象)など、何らかの物理的手段によってある時間に一定の正確さで関係付けられることを示唆する。図1の例では、固定点は記録点150が可能であり、図2のタイムラインでは、時間は記録時間250と252である。図15の例では、エッジ検出器1510は、ラベル貼り付けアーム162のストロークの頂点に位置する。図18では、時間は記録時間1800である。エンコーダのカウントが時間の代わりに使用されることがある。
【0174】
本発明は、作動装置を直接制御している場合でも、PLCまたはその他任意の外部装置により使用されている場合でも、記録時間と一定の正確さで同期化された出力を提供できる。しかしながら、1つの問題は、本発明は、発生してから何ミリ秒かの後、つまり、記録時間のミリ秒後に事象を検出することである。さらに、遅れは、それほどではないにしても、取得/分析サイクルにおいて記録時間がいつ発生するかは、何個のフレームが分析されるかに応じて非常に変化することがある。
【0175】
図18は、事象検出論理出力1840を示す。検出パルス1870は、決定が決定点1810で行われるとき、事象検出論理出力1840に表示される。決定点1810は、図3のフローチャートの事象ブロック372が実行される時点に対応する。記録時間1800から決定点1810までの決定の遅れ1830は、それほどではないにしても、分析されるフレームの個数に応じて、取得/分析サイクルにおいて記録時間がいつ発生するかは、変化することがある。従って、検出パルス1870のタイミングは、事象がいつ発生したかに関する正確な情報を伝達しない。
【0176】
可変する決定の遅れ1830の問題は、画像を取得して分析することにより、事象を検出しようとするすべての装置に適用される。また、事象がいつ発生したかを示す信号を、フレーム周期(フレームレートの逆数)よりも高い正確度で提供することが好ましい場合に適用する。本発明は、記録時間1800を測定してから、出力信号1860の出力パルス1880を記録時間に同期化することにより、この問題を解決する。
【0177】
出力パルス1880は、記録時間1800から固定された出力の遅れ1820で発生する。記録時間の測定動作は「マーキング」と呼ばれる。記録時間は、適切な探知器により決定されると、画像、物体の知られている位置、機械構成要素または視野で運動している物体が取得されると知られている時間(またはエンコーダのカウント)を使用して、線形補間、最小二乗フィット、またはその他のよく知られている方法よりもはるかに高い正確度で決定できる。正確度は、シャッタータイム、取得/分析サイクルの全体時間、移動速度、およびその他の要素により異なる。
【0178】
例示的実施形態では、ユーザーは、検索範囲がマーキングのために使用される移動方向と実質的に同じ1つの探知器を選択する。フロー事象の場合は、マークポイントは、上記のように、探知器の範囲の中央になる点が任意に選択されるが、記録点は、固定されている限り正確な位置が問題にならない架空の基準点である。ユーザーは、この任意の時間からの遅れを調節することにより、出力信号の好ましい同期を実現できる。
【0179】
事象が検出されてもアクティブフレームの間に運動が記録点を交差しなければ、記録時間は、推定が基本になるので、正確度は低くなることがある。ストローク事象の場合、記録点は、ストロークの頂点であり、以下で説明されるように測定される。記録点のその他の定義は、本発明を実践するために使用できることが明らかである。
【0180】
出力信号は、出力の遅れ1820が決定予想の最大の遅れ1830よりも長ければ、記録時間とだけ同期できることに注意する。このように、出力パルス1880の結果としてとられるすべての動作は、例えば、作動装置の操作のように、記録点の十分なダウンストリームになければならず、ほとんどすべてのアプリケーションの場合に想定される。
【0181】
図19は、ストローク事象の場合の時間関数としての探知器の結果のグラフを示す。探知器は、例えば、図15の探知器1500のように、ストローク方向と実質的に並行な方向で検索するように構成されなければならない。検索される次元がストローク方向と実質的に並行な方向を含む限り、多次元の探知器も使用できることに注意する。任意の基準点から測定される時間が水平軸1900に描かれる。探知器の論理出力は、白抜きの点1920および塗りつぶされた点1922など、四角いポイントの連続として描かれ、探知器位置曲線1950により結ばれる。フレームに対応する四角い点が描かれた別々の時間だけで、探知器は位置を測定する。従って、探知器の位置曲線1950は、読み手の任意に描かれると理解され、探知器による連続的な測定を表さない。四角い点の縦の位置に対応する論理出力値は、第一の縦軸1910に描かれる。白抜きの点1920などの白抜きの四角い点は、探知器が対象の画像の特徴を見つけたという確信がほとんどない場合の低い論理出力値(0.5未満、例示的実施形態の基準線1914に相当する)を表す。塗りつぶされた点1922などの黒い四角い点は、探知器が対象画像の極超を見つけたという強い確信がある場合の高い論理出力値(例示的実施形態では0.5以上)であり、従って、測定位置が有効であることを示す。
【0182】
測定された探知器の位置は、位置ポイント例1930など、黒丸として描かれた位置点の連続として描かれる。位置点の縦の位置に対応する位置の値は、第二の縦軸1912に描かれて、探知器の中央からのピクセルで測定される。位置点は、探知器の論理出力が0.5以上の場合のフレームだけ、つまり、探知器が対象画像の特徴を発見したという強い確信があるフレームだけに、表示されることに注意する。
【0183】
視野の機械的構成要素が、探知器の検索範囲を、頂点に向かって、約+6ピクセルで、約4個のフレーム分前進し、約6個のフレーム分、その頂点で維持されてから、検索範囲を超える前に別の4個のフレーム分後退した位置ポイントを確認することによりわかる。このストローク事象の特定の記録時間を計算するために、例示的実施形態は、位置ポイントを使用して、最適な放物線1940を計算すると、放物線1960の頂点が容易に決定される。説明的例では、記録時間(最適放物線の頂点)は、19.2ミリ秒で発生する。
【0184】
ポイントのセットから最適放物線を計算するための方法は、技術的によく知られている。当業者には、本発明の範囲内において、ストローク事象の頂点を決定するためのその他の方法を使用できることが明らかである。さらに、本明細書で説明される方法を使用して、本明細書で検討されるフローおよびストローク事象以外の運動が追跡できること、さらに、このような運動の場合の記録時間を決定するために、適切な曲線がフィットできること、また、その他の技術を使用できることが明らかである。
【0185】
図20は、出力の遅れ1820(図18)を設定する制御などの、出力機器のユーザー設定のためのパラメータ表示を示す。モード制御2000により、ユーザーは、出力信号をどのように制御するかを選択できる。「直線」モードでは、論理入力は、遅れまたは同期が全くなく、出力信号に直接渡される。「遅延」モードでは、論理入力の上昇部分上で、出力パルスは、遅延制御2010により指定された量だけ、最も直近に測定された記録時間(またはエンコーダカウント)から遅れた時間で、および、パルス制御2020により指定された期間の間、発生するようにスケジュールされる。スケジュールされたパルスは、出力機器に関連づけられたFIFOに配置されることもある。
【0186】
[画像の記録と検索]
図21は、例示的実施形態で使用されるメモリ710(図7)の一部の組織の詳細を示す。フレームバッファプール2100は、さまざまな目的で使用される、フレームバッファ2130、2132、2134、2136および2138のようないくつかの個別のフレームバッファを含む。フリープール2110は、リングバッファとして組織されて、事象決定のためのフレームを取得して分析するために使用される。書き込みポインタ2120は、次のフレームが取得される、次に使用可能なフレームバッファ2130を示す。フレームバッファ2130への画像取得と同時に、フレームバッファ2132にある以前の画像が分析されている。ある時点で、リングバッファはいっぱいになることがあり、その時点で、古いフレームは上書きされる。
【0187】
撮像装置760がLM9630である場合の例示的実施形態では、例えば、各フレームバッファは、128x100個の8ビットピクセルを含む。図では、フレームバッファプール2100は、明確化のために、数十の要素だけを含むように示されているが、実際には、さらに多いほうが望ましい。ある実施例では、160個の要素が使用されているが、2メガバイトをやや下回るストレージが必要であり、200フレーム/秒の実行速度で約0.8秒、または、500フレーム/秒の実行速度で約0.32秒で保管する能力である。明らかに、フレームレートが低くなると、画像を保管できる時間は増加する。
【0188】
事象が検出されると、事象が発生してから多くのフレームが発生することがあるが、取得された画像の最近の履歴は、フリープール2110にある。例示的実施形態では、フリープール2110は、事象フレーム、および、アプリケーションの目的のために十分な数の事象フレームの前後のフレームを保持する十分な大きさである。事象が検出されるとき、最近の履歴は、記録制御1050のようなユーザーの選択により、記録されるフレームがない、一部、または全部を含むことがある。最近の履歴がフレームのすべてを含む場合は、以下で説明されるように、直ちに記録できる。すべてを含まない場合は、記録は、記録されるフレームのすべてが利用可能である将来の時点で発生する。
【0189】
例示的実施形態において、例2134など、「R」とマークされたフレームバッファは、記録される画像を保持し、例2136などの「E」は事象フレーム(記録される)を保持する。事象は記録時間2160で発生し、バッファ2134のフレームの分析中に検出される。事象が検出されたとき、記録されるフレームの全部ではないが、一部が最近の履歴にある。バッファ2132のフレームを後で分析中に、最近の履歴はこれで記録されるフレームすべてを含むと決定される。
【0190】
フレームを記録するために、フレームバッファはフリープール2110から削除されて、保管された事象2112、2114および2116を含む、保管された事象プール2104に追加される。新しく保管された事象を削除後にフリープール2110のフレームバッファの数が小さくなりすぎる場合は、さまざまなアクションが可能である。ある実施例では、事象検出は、バッファがフリープール2110に戻ることができるように、HMI630(図6)がフレームを保管された事象プール2104にアップロードするまで、中断する。別の実施例では、1つ以上の保管された古い事象は保管された事象プール2104から取り出されて、フリープール2104に戻されることがある。これらの古い事象は、表示することはできなくなる。
【0191】
例示的実施形態では、フレームバッファは決してコピーされない。その代わりに、フレームバッファは、技術的によく知られた技術を使用するポインタ操作により、フリープール2110と保管された事象プール2104の間を移動する。
【0192】
リスト要素2140、2142および2144など、保管された事象のリスト210 2が維持される。リスト要素2140は、例えば、次の要素ポインタ2150、フレームバッファカウント2152、結果情報2154、および保管された事象ポインタ2156を含む。結果情報2154は、図にあるようにタイムスタンプ、または、表示されていないがアクティブデータ302のような他の情報を含むことがある。
【0193】
結果情報2154は、事象全体に適用される情報を含む。保管された事象プール2104のフレームバッファで表示されている例のように、各記録されたフレームの情報を提供することがさらに好ましい。例示的実施形態では、保管された情報は、記録時間に想定的なフレームの取得時間をミリ秒単位で記録するタイムスタンプを含む。事象検出加重や個別の機器の結果のようなその他の情報(表示されていない)も記録されることがある。
【0194】
図6に戻って参照すると、ビジョン検出器は、設定を目的として、信号640を経由して人−マシンインターフェイス(HMI)630に接続されることがある。また、HMIがビジョン検出器600の一部であることも可能であるが、これは、HMIは一般的に事象検出には必要ではないため、あまり好まれない。したがって、1台のHMIは多数のビジョン検出器の間で共有できる。HMIは、図22に示される図説部分の従来の設計のグラフィカルユーザーインターフェイス(GUI)を実行することがある。
【0195】
GUIにより、ビジョン検出器のメモリ710に保管された記録された画像の一部が、人間のユーザーに表示されることが可能である。図22の例示的実施形態では、映写スライドウィンドウ2202は、8個までのサムネイル画像2210、2212、2214、2216、2220、2230、2232および2234を表示する。それぞれのサムネイル画像は、保管された事象プール2104に対応する記録された画像の低解像度バージョンである。一般的に、サムネイル画像は、記録の単独事象の連続画像に対応するが、対応するサムネイルの間の画像の何個かを省略するなど、その他の処理も有用なことがある。
【0196】
スクロール制御のセット2250は、事象の記録された画像内、または事象間で前後してサムネイル画像を移動するために映写スライドウィンドウ2202に提供される。次の画像制御2260は、画像を1つずつ進めて、以前の画像制御2262は画像を1つずつ逆に進む。次の事象制御2264と以前の事象制御2266は、事象を1つずつ前後に表示する。
【0197】
サムネイル2220は、物体116(図1)の例に対応することがある、物体224 2の低解像度画像を表示する。また、物体2242は、サムネイル2210の物体例2240のように、わずかに異なる表示視点(視野内の位置)およびアーム2272によるラベル2270の貼り付けの間異なる時間で、その他のすべてのサムネイルも表示する。スクロール制御2250を使用してスクロールコマンドを発行することにより、ユーザーは、任意の望ましい時間間隔を見るために記録された画像を前後に移動できる。特に、サムネイル2212、2214および2216にある図説の画像例を検討すると、ラベル2270は、貼られているように、物体の上端で引っかかっているように見える。
【0198】
図22の例示的実施形態では、太線で囲まれて「選択された画像」として参照されている、サムネイル2220に対応する画像も、画像表示ウィンドウ2200で最高解像度で表示される。スクロールコマンドが表示部分を前後に進むにつれて、別の選択された画像がサムネイル2220に移動して、画像表示ウィンドウ2200で最高解像度で表示される。記録時間に想定的に選択された画像の取得時間(この例のミリ秒)を示すタイムスタンプ2280のような選択された画像についてのその他の情報も表示される。
【0199】
以上は、本発明のさまざまな実施例の詳細説明である。本発明の製品および範囲から逸脱することなく、本発明にさまざまな範囲の修正や追加を行えることが明らかである。例えば、本明細書のプロセッサと計算デバイスは例であって、スタンドアロンと分散両方のさまざまなプロセッサおよびコンピュータが、開示された計算を実施するために採用できる。同様に、本明細書で記述された撮像装置やその他のビジョン構成要素は、例であって、改善されたまたは別の構成要素が本発明の開示内で採用できる。ソフトウェア要素、GUI設計およびレイアウト、パラメータ値、および数式は、すべて本発明の特定のアプリケーションに適するように同等に修正または置換できる。従って、本記述は一例を意味するものであって、本発明の範囲を限定するものではない。
【技術分野】
【0001】
[発明の背景]
本発明は、高速ビデオ事象検出、動作分析、画像記録、自動画像分析に関係するものである。
【背景技術】
【0002】
[関連技術の説明]
人の目では速すぎて見ることが難しい機械システムの分析動作のために、高速画像記録装置を使うことは、当技術分野で周知である。これらの装置は、スローモーションまたは、スチール画像としての画像を表示し、人間のユーザーのために高速機械動作を見て、分析するために、機械処理の毎秒数百または数千の画像を取得し、録画するものである。
【0003】
特に関心があるものに、機械処理において故障を引き起こす場合がある、まれな、短時間の機械的事象の記録である。事象がまれで短時間であるという事実は、特別な課題を生む。たとえば、画像記録装置が毎秒1000画像を録音するとすれば、事象は、3ミリ秒続き、平均一時間に一度起こる。追加の装置なしに、人間のユーザーが事象を含む2または3の事象を見つけるために平均360万の写真を見る必要があるであろう。
【0004】
事象が起こる場合、示す画像記録装置のトリガ信号を供給することにより、この課題に対応することは、当技術分野で周知のことである。画像記録装置は、最新の画像の限られた数を保存し、トリガ信号が事象が起こったことを示す場合、録画の最後の一秒であると言い、簡単な追加時間を記録し、終了する。これは、事象の前後の両方で見る、各画像の少数をユーザーに与える。更に、各画像がトリガ信号により示された事象の時間に関連して取得された場合、ユーザーは、確実に分かる。
【0005】
明らかに、この方法の成功は、的確なトリガ信号を生成することができるかどうかによる。この目的のために光検出器を使うことは、当技術分野で周知のことである。例示的な光検出器は、物体の表面の点により反映される、または、物体が通過する可能性のある経路沿いに送信される光の強度に対応する光源と単一光電子センサーを持つ。ユーザーの調整可能な感度閾値は、光検出器の出力信号に電圧を加える上の(または、下の)光強度を確立する。
【0006】
それは、しばしば、複数の光検出器がトリガ信号を供給する必要がある例である。たとえば、機械処理が製造ラインの生産離散物体である場合、事象は、部品不足で物体の生産に対応し、一つは、物体が存在する時に検出するもの、もう一つは、部品不足を検出するためのものとして、少なくとも2つの光検出器が必要である。時々、複雑な事象を検出するために2つ以上の検出器が必要である。
【0007】
しかし、トリガ信号の供給に光検出器を使うことには、次のような幾つかの欠点がある。
・一つ以上の点で送信または、反射される光の強度の単純な測定は、事象を検出するためには不十分である場合がある。
・確実に正確な点を見るように、各光検出器の位置を調整するのは難しい。
・測定された点は、機械的な処理の通常操作の間、あちこち移動させてはならない。
・複数の光検出器の必要性は、導入、設定を難しくさせる。
【0008】
トリガ信号の供給に機械視覚システムを使うことは、当技術分野で周知のことである。機械視覚システムは、二次元の視野のデジタル画像を取得でき、画像を分析し、決定することができる装置である。画像は、積分時間、または、シャッター時間と呼ばれる、短時間に、レンズにより配置に焦点される光に対して、感光部材の二次元配置を感光させることにより取得する。その配置は、撮像装置と呼ばれ、個々の要素は、ピクセルと呼ばれる。各ピクセルは、シャッター時間でそれに向かって行く光の強度を測定する。測定された強度値は、デジタル数に変換され、画像形成のための視覚システムのメモリで保存され、それは、決定のための当技術分野で周知の方法を用いて、コンピュータのようなデジタル処理要素で分析される。
【0009】
機械視覚システムは、光検出器の限度を避けることができる。一つの機械視覚システムが、多くの光検出器に交換でき、単一点強度測定の代わりに、広範な明るさのパターンの高度な測定を行う。見る位置を調整するには、スクリュードライバーやレンチの代わりにグラフィカル・ユーザー・インターフェイスを使ってすることができ、それらの位置は、それ自身の画像の内容に基づき、各画像を移動させることができる。
【0010】
しかし、機械視覚システムには、下記のような固有の欠点がある。
・機械視覚システムは一般に、事象が個々の物体の検査に関係するものであるときにしか一般に適しない。
・機械視覚システムは、遅すぎて短時間しか持続しない事象を検出できないため、不良品のような事象により発生する長期間持続する状態を探さなければいけない。
【0011】
ここで留意すべきは、機械視覚システムが、トリガ信号を供給するのに使われたとき、それは、高速画像記録装置とは別々のものであることである。それは、検出された事象を含む画像は、見れないし、その装置より取得された画像を分析できない。たとえ、それらの画像が機械視覚システムで利用できるとしても、とてつもなく割合が高く、生産されるので、従来の設計の機械視覚システムより分析されない。
【0012】
視覚検出器の方法と装置は、トリガ事象が起こったことを検出するための従来の技術の光検出器と機械視覚システムの上記に説明される限度を克服することができる、新規の方法とシステムを教える。また、これらの教えは、原型の教えの範囲の下で、改善を導く発明のための材料を提供する。以下の章では、視覚検出器の方法と装置を簡単に要約し、それに続く章では、本発明により扱われた問題を提示する。
【0013】
[視覚検出器の方法と装置]
視覚検出器の方法と装置は、検出され、検査された物体が位置し得る二次元の視野のデジタル画像を取得し、画像を分析し、決定することに基づいて、物体の自動光電子工学の検出と検査のためのシステムと方法を供給する。これらのシステムと方法は、広範なエリアから反映した明るさのパターンを分析し、物体の多くの区別できる特徴に対処し、ソフトウェア手段を通して、ライン切り替えを供給し、不確かな利用できる物体の位置に対応する。それらは、従来の技術の機械視覚システムよりもあまり高価ではなく、設定するのがより簡単で、はるかに高速で操作できる。これらのシステムと方法は、更に、物体が動くことの多くの見通しを活用し、トリガなしに操作でき、適切な同期化される出力信号を供給し、当業者に明らかであるほかの重要で役に立つ能力を供給する。
【0014】
視覚検出器の方法と装置の一つの態様は、従来の技術の視覚システムよりも高速で一連の画像をを取得し、分析できる、視覚検出器と呼ばれる、装置である。取得され、分析されたこのような一連の画像が、フレームと呼ばれる。動いているものが視野(FOV)を通過した場合、フレームレートと呼ばれる、フレームが取得され、分析される割合が、それが多数の連続フレーム内に見られることが十分に高いと言われる。物体が連続するフレーム間で動いているので、視野で多くの位置に置かれ、それゆえに、照明に関連した多数の視覚の視点と位置から見られる。
【0015】
視覚検出器の方法と装置のもう一つの態様は、動的画像分析と呼ばれる、物体が視野に位置し、多数のフレームを取得し、分析することにより、フレームのそれぞれから得られる証拠の合成結果を基にすることにより、物体を検査するための方法である。その方法は、単一のフレームを基づいて、決定する従来の技術の機会視覚システムを超える重要な利点を供給する。
【0016】
更に、視覚検出器の方法と装置のもう一つの態様は、視覚事象検出と呼ばれる、視野で起こる可能性のある事象を検出するための方法である。事象は、視野を通過する物体であり、視覚事象検出を使うことにより、トリガ信号の必要なしに、物体を検出する。
【0017】
視覚検出器の方法と装置の追加の態様は、そこに示される図の研究と詳細な説明で明らかになるだろう。
【0018】
多数の視点から画像を得るために、検出され、検査される物体が、連続のフレーム間で少なくとも視野の少数の割合で、少なくとも2、3ピクセルで動くことが好ましい。視覚検出器の方法と装置によれば、物体の動きは、フレームにつき、FOVの約1/ 4以下であることが一般に好ましく、例示的な具体例では、たったFOVの5%もしくはそれ以下であることが好ましい。これは、製造処理を遅くするだけでなく、十分な高フレームレートを供給することにより、達成することが好ましい。例のシステムでは、フレームレートは、少なくとも毎秒200フレームで、もう一つの例では、フレームレートは、物体が視覚検出器に出現する平均の割合の少なくとも40倍である。
【0019】
例示的なシステムは、毎秒500フレームまで取得し、分析できるように教えられている。このシステムは、従来の技術の視覚システムよりもはるかに少ないピクセルを持つ、超敏感な撮像装置を利用している。高感度は、低価なLEDを用いて、とても短いシャッター時間を可能にし、それは、それぞれ少数のピクセルの合成でとても短い取得時間を可能にする。撮像装置は、分析操作で動的にピクセルデータを受取り、保存できる、デジタル・シグナル・プロセッサ(DSP)へ接続する。そこで教えられ、DSPのための適応するソフトウェアを用い、実行された方法を使い、一般に各フレームを分析する時間は、次のフレームを取得するのに必要とされる時間内で保持することができる。取得と分析の方法と装置は、好ましい高フレームレートを供給するために合成される。本発明の物体を用い、撮像装置、DSPと照明のの能力を注意深く一致させることにより、例示的なシステムは、従来の技術の機械視覚システムよりも著しく低価にすることができる。
【0020】
視覚事象検出の方法は、連続フレームを取得し、事象が起こっている、もしくは、起こった証拠を決定するために各フレームを分析することを含む。視覚事象検出がトリガ信号の必要なしに、物体を検出するのに使われた場合、分析は、物体が視野に位置している証拠を決定する。
【0021】
例示的な方法では、証拠は、物体検出加重と称する、物体が視野に位置している信頼度のレベルを示す値の形式である。その値は、信頼度のレベルの範囲、または、証拠を導く情報のいくつかの項目を示す数で、高いまたは、低い信頼度を示す、単にはい/いいえの選択であってもよい。このような数の例の一つとして、そこに更に説明された、いわゆるファジー論理値である。ここで留意すべきは、機械は、画像から完璧な決定をすることができないので、不完全な証拠に基づいて判断をすることになる。
【0022】
物体検出を実行する場合、各フレームは、物体が視野に位置しているということを十分に示す証拠があるかどうかを決定するために試験される。単にはい/いいえの値が使われた場合、その値が「はい」であれば、証拠は、十分であると見なされ得る。数が使われた場合、充足は、閾値までの数を比較することにより決定されてよい。証拠が十分であるフレームは、有効フレームと称する。ここで留意すべきは、手元にある特定のアプリケーションの理解に基づいて、視覚検出器を設定する人間のユーザーによって結局のところは定義されたもので十分な証拠は、構成されていることである。視覚検出器は、自動的にその決定をする定義に適応する。
【0023】
物体検出を実行する場合、視野を通過した各物体は、視覚検出器の高フレームレートによって、多数の有効フレームを生成する。しかし、いくつかの視点または、ほかの状態であり得る、視野を物体が通過するために、これらのフレームは、事象が視野に位置している証拠は十分でないので、正確には連続ではない場合がある。したがって、有効フレームが見つかった場合、物体の検出を始め、多くの連続する無効フレームが見つかるまで終了しないことが好ましい。この数は、ユーザーにより適切に選択される。
【0024】
有効フレームのセットが視野を通過する物体に対応することができるということがわかると、物体が実際に検出されたかどうかを決定するためにさらなる分析を実行することが好ましい。このさらなる分析は、有効フレームの数、物体検出加重の合計、平均物体検出加重、および、同等のものを含む、有効フレームの統計を考慮することができる。
【0025】
動的画像分析の方法は、物体を検査するための多数のフレームを取得し、分析することを含み、「検査」は、物体の状態についての情報を決定することを意味する。この方法の一つの例では、物体の状態は、ユーザーにより必要に応じて選ばれた検査基準をその物体が満たすかどうかを含む。
【0026】
視覚検出器の方法と装置の態様では、視覚事象検出方法により選ばれた有効フレームは、物体を検査するために動的画像分析方法により使われたものであるので、動的画像分析は、視覚事象検出と組み合わされる。視覚検出器の方法と装置のその他の態様では、動的画像分析により使われたフレームは、トリガ信号に応答することで取得することができる。
【0027】
このような各フレームは、物体が検査基準を満たす証拠を決定するために分析される。一つの例示的な方法では、物体合格スコアと称する、物体が検査基準を満たす信頼のレベルを示す値の形式である。物体の検出加重と同様に、その値は、高い、または、低い信頼度や、信頼度のレベルの範囲や証拠を導く情報のいくつかの項目を示すファジー論理値のような数を示す、単にはい/いいえの選択であってよい。
【0028】
物体の状態は、物体合格スコアの平均または、百分率のような、物体合格スコアの統計から決定されてよい。また、状態は、物体決定加重を用い、加重平均または、加重百分率のような、加重統計により決定されてもよい。加重統計は、その信頼が、物体が実際にそのフレームの視野に位置していることが高いことを特徴とする、フレームから更に重要な証拠として重きをおく。
【0029】
物体の検出と検査の証拠は、物体の一つ以上の可視特徴についての情報のためのフレームを検査することによって得られる。可視特徴は、放射光の量、パターン、または、その他の特徴が、物体の出現、独自性、状態についての情報を伝達する、その物体の一部分である。光は、物体の外部または内部の情報源の反映、伝達、または、屈折、または、物体の内部の情報源であることを含むが、それらに限らない、いくつかの処理または、処理の組み合わせにより、放射される。
【0030】
視覚検出器の方法と操作の一つの態様は、物体検出加重と物体合格スコアを含み、それに対し、証拠が必要とされる各フレームの一つ以上の関心領域で画像分析操作により、証拠を得る方法である。この方法の一つの例では、画像分析操作は、関心領域でピクセル値に基づいて測定を算定し、その測定は、物体の可視特徴の適切な特徴に応答するものである。測定は、閾値操作による論理値に転換され、関心領域から得られた論理値は、フレームの証拠を形成するために組み合わされる。論理値は、必要に応じて、二元またはファジーの閾値と論理結合を使う、二元、またはファジー論理値である。
【0031】
視覚事象検出のため、物体が視野に位置していることの証拠が関心領域、測定、閾値、論理合成、および、他のここに更に説明されたパラメータにより、有効に定義され、それは、まとめて視覚検出器の設定と呼ばれ、本発明の与えられたアプリケーションのために必要に応じて、ユーザーにより選ばれる。同様に、視覚検出器の設定は、十分な証拠を構成するものとして定義される。
【0032】
動的画像分析のために、物体が検査基準を満たす証拠はまた、視覚検出器の設定により、有効に定義される。
【0033】
[問題点の検討]
高速事象検出、動作分析、画像記録のためのトリガを供給する光検出器と機械視覚システムの与えられた限度は、高速視覚事象検出を供給することにより、および、それを高速画像記録と統合することにより、トリガ信号の必要性を避ける方法とシステムの改善が必要である。
【0034】
視覚検出器の方法と装置は、動作分析で使うための画像記録で統合を学ばせないで、ほかの利点で、高速視覚事象検出を供給する新規の画像分析の方法とシステムを学ばせる。従って、事象の自動視覚検出、記録、検索のための新規の役に立つ方法とシステムを達成するための好ましい画像記録と表示能力を用い、好ましい要素と視覚検出器の方法と装置の設定を組み合わせた方法とシステムの改善が必要である。
【0035】
更に、視覚検出器の方法と装置は、視野を通過する個々の物体に対応する事象を検出することを主として、視覚事象検出の実例となる具体例を供給する。これらの教授は、ほかの事象タイプを検出するのに使用できることは当業者には明らかであろうが、そこに教えられない改善はまた、このような事象を検出するのに役立つことができる。従って、さまざまな事象を検出するのにその実用性を改善するために視覚事象検出の教授を広げる必要がある。
【発明の開示】
【課題を解決するための手段】
【0036】
[発明の概要]
本発明により、事象の自動視覚検出、記録および検索のための方法およびシステムが提供される。本明細書では、
・「事象」とは、視覚手段により検出できる、撮像装置の視野内の一部の時間変化条件の中の特定条件を指す。
・「自動視覚検出」とは、前記撮像装置により取得された画像の内容を基本にして、人間の介入または外部のトリガ信号を必要とせずに事象が検出されることを意味する。
・「記録」とは、前記事象がメモリに保管される前、保管される間、および/または保管された後に対応する画像を意味する。
・「検索」とは、これらの画像が、人間のユーザーのための表示などの目的のために検索され、さらに、画像分析システムによりさらに自動分析されることを意味する。
【0037】
本明細書において開示される方法およびシステムは、事象が発生したことを外部機器に発信する、および事象がいつ発生したかを示す同期出力パルスを提供するなど、しかしこれらに限定されない任意の目的のために、事象の自動視覚検出に有用である。機械的処理の高速運動分析にさらに有用であり、短時間のまれな事象の画像用のその他任意の応用が望ましい。
【0038】
本発明の開示に従い、ビジョン検出器またはその他の適切なデバイスは、一部の特別な条件に対応するイベントが発生することのある機械的処理などのように、その視野が一部の時間変化条件を含むように配置され、事象を検出するように構成される。前記ビジョン検出器は、各フレームが視野の画像である、一連のフレームを取得する。さらに、視覚検出器の方法と装置で開示された方法およびシステムなど、しかしこれらに限定されない任意のさまざまな方法およびシステムを使用して、以下でさらに詳細が明らかになるように、視野で事象が発生したという証拠を取得するために前記フレームを分析する。
【0039】
事象が発生すると、分析は、事象が発生したという十分な証拠を明らかにする「事象フレーム」のセットを識別する。セットは、事象フレームを1個だけ含むこともあるが、複数の事象フレームを含むこともある。本明細書で開示される例示的実施形態では、事象フレームは一連のフレームで連続しているが、事象フレームが完全に連続していない場合も、本発明の範囲内において実施例を考案することは容易である。
【0040】
次の例を考慮する。検出される事象は、許容範囲外で移動している運動機械構成要素に対応する。ビジョン検出器は、許容範囲外の視野の領域である、誤差範囲の構成要素を検出するように構成される。一部の機械サイクルでは、構成要素は3個の連続フレームの間、誤差範囲を通過運動すると想定する。さらに、フレームの分析により、構成要素が第一番目と第三番目のフレームで誤差範囲にあることを示す証拠は強く、構成要素が第二番目のフレームで誤差範囲にあることを示す証拠は弱いことが明らかになると想定する。これは、第二番目のフレームの照明に対する構成要素の視点または位置が、構成要素が見えにくい視点または位置であるために発生することがある。また、分析により、構成要素は、3個の重要なフレームの前後で、多数のフレームがその範囲にあったとは考えにくいことも明らかにする。
【0041】
事象フレームのセットは、第一番目のフレームが前記事象が発生していることを強く示す証拠を明らかにしたときに開始し、以降のフレームが前記事象が継続していることを示す証拠がないときに第三番目のフレームで終了した。第一番目と第三番目のフレームを合わせた肯定的な証拠と、第二番目のフレームの弱い証拠は、事象が発生したと結論づけるに十分であると判断される。この例では、3個のフレームが事象フレームである。
【0042】
一部の実施例では、第二番目のフレームは事象フレームとは見なされない。第二番目のフレームを事象フレームであると考えるかどうかの選択は、本発明の範囲内ではどちらにも考えることができる。本明細書に開示された例示的実施形態では、事象フレームは連続的であり、第二番目のフレームを含むと考える。
【0043】
証拠が事象が発生したと決定するために十分であると判断されると、複数の選択されたフレームが一連のフレームから選ばれて、メモリに記録される。フレームは、事象フレーム、または、後述するように計算される記録時間に対する一連のフレームの中の位置に応じて、記録されるために選択される。事象フレーム自体が記録されることもあるが、一連のフレームの中の事象フレームの前のフレームが記録されることもある。また、一連のフレームの中の事象フレームの後のフレームが記録されることもある。例示的実施形態では、記録時間に対してユーザーが指定した時間間隔内で取得されたフレームが記録される。別の例示的実施形態では、事象フレームと事象フレームの直前および直後の連続フレームなど、予め決定された数のフレームが記録される。
【0044】
これらの保管された選択フレームからのフレームが、コマンドに応答して検索され、コマンドを発行するために、グラフィカルユーザーインターフェイスを使用している人間のユーザーのための表示、さらに、コマンドを発行している画像分析システムによりさらに自動化された画像分析など、さまざまな目的のために使用される。
【0045】
フレームが人間のユーザーのために表示される実施例では、一般的には一度にいくつかのフレームを表示することが望ましいが、典型的にはユーザーが各画像で有用な詳細を見るために十分なディスプレイ解像度で記録した画像を一度にすべて表示することは実用的ではない。本発明に従い、記録されたフレームの一部が一度に表示される。ユーザーは、表示される部分を前後に移動するスクロールコマンドを発行することにより、表示される部分を選択する。一度に表示される部分は、数個のフレームを含むことが好ましいが、最低1つのフレームを含むことができる。
【0046】
例示的実施形態として、フレームはグラフィカルユーザーインターフェイス(GUI)を使用して表示される。一度に表示されるフレーム部分は、GUIの「映写スライドウィンドウ」に含まれており、低解像度の連続した「サムネイル」画像としてフレーム部分を表示する。サムネイル画像の解像度は、有用な数の画像を一度に見ることができるに十分な低解像度にも、各画像の詳細を見ることができる高解像度にも選択される。スクロールコマンドは、従来のGUI要素により提供される。
【0047】
この例示的実施例は、さらに、画像表示ウィンドウにおいて、完全な解像度で前記フレーム部分の1個のフレームを表示する。スクロールコマンドにより映写スライドを前後に移動すると、画像表示ウィンドウに表示されるフレームも前後に移動する。
【0048】
例示的実施例では、視野において事象が発生したという証拠は、事象が発生しているまたは発生した信用レベルを示す、「事象検出加重」と呼ばれる値の形で各フレームに取得される。前記値は、信用レベルの高低を示す簡単なはい/いいえの選択、信用レベルの範囲を示す数字、または証拠を伝達する情報の任意の項目のことがある。このような数の一例は、ファジー論理値と呼ばれるもので、詳細は後述される。画像から完璧な決定を下すことができる機械はないので、不完全な証拠を基本にして決定することになる。
【0049】
事象検出加重は、フレームの1つ以上の対象領域上の画像分析演算により、各フレームに対して取得される。例示的実施形態では、各画像分析演算は、対象領域のピクセル値を基本にして測定を計算するが、測定は領域の光量、パターン、またはその他の特徴に対応する。測定は、閾値演算により論理値に変換され、対象領域から取得された論理値は、フレームの事象検出加重を計算するために組み合わされる。論理値は、バイナリまたはファジー論理値で、閾値と論理の組み合わせは必要に応じてバイナリまたはファジーである。
【0050】
例示的実施例では、以下の場合の事象フレームは連続フレームのセットである。
・セットの最初と最後のフレームの事象検出加重が閾値を超える場合。
・最後のフレームの後に、事象検出加重が閾値を超えないフレームが少なくとも一部の決定済みの個数だけある場合。
・フレームセットの事象検出加重が一部の決定済み条件を満足する場合。
【0051】
この目的のために、任意の適切な条件を定義してもよいが、条件は下記のものに限定される:
・セットにあるフレームの個数、
・平均事象検出加重、
・事象検出加重合計、
・事象検出加重の中央値、
・事象検出加重が閾値を超える、セットにあるフレームの個数またはフレームの割合。
【0052】
本発明により記録されるフレームは、取得された時間でスタンプされることが望ましい。事象の詳細調査を可能にするために、タイムスタンプは、例えば、時刻ではなく、事象自体の発生時間に相対的にタイムスタンプすることが最も有用である。事象フレームは事象の全体的な時間範囲を定義するが、特定時間は定義しない。事象の特定の有効な時間を取得するには、視覚検出器の方法と装置で開示されたようにマークタイプを使用することがある。開示されているように、記録時間は、物体が一部の架空の固定基準点を交差する時間であり、開示に従い正確に計算できる。
【0053】
しかしながら、すべての事象が基準点を交差する物体に対応するわけではない。例えば、事象は、視野で機械構成要素が前後に移動するストローク動作に対応することがある。このような場合、記録時間は、通常、基準点の交差ではなく、ストロークの頂点として定義することがより有用になる。基準点の周囲の動作は、フロー事象と呼ばれ、前後の動作はストローク事象と呼ばれる。本発明は、フローとストローク事象のいずれかを選択するための方法およびシステム、および、ストローク事象の記録時間を計算するための方法およびシステムを含む(フロー事象のための記録時間は視覚検出器の方法と装置で開示された)。
【0054】
本発明による事象検出は、視覚検出器の方法と装置で開示された視覚事象検出の例であり、「視覚事象検出の方法は連続したフレームの取得と事象が発生するまたは発生した証拠を決定するための各フレームの分析に関与する」と説明される。本明細書で開示されるように、視覚事象検出は、主に、検出される事象が視野を通過する別々の物体に対応して、一般的に物体を点検することが好ましい実施例に対して向けられる。読み手は、本明細書に開示される物体検出加重と物体通過スコア、および、本発明で使用される事象検出加重の間に非常な類似性があることに気づくであろう。確かに、物体検出加重または物体通過スコアを取得するために本明細書に開示された任意の方法または装置は、事象検出加重を取得するために使用できる。唯一の違いは、これらの加重やスコアが取得されるやり方ではなく、使用される目的である。
【0055】
さらに、物体が視野を通過したことを検出、またはさらに具体的には、不良物体が視野を通過したことを検出することは、本発明に従い事象を検出、記録および検索するために望ましいことがある事象の例である。確かに、視野を通過する物体を検出することと、上記の例のように誤差範囲に入る機械構成要素を検出することにはほとんど違いはない。このように、視覚検出器の方法と装置の開示は、一般的に本発明の例示的実施形態と考えることができ、記録および検索方法およびシステム、および改善された事象検出方法およびシステムは本明細書の開示により追加される。
【0056】
本発明は、添付の図面と併せて詳細な説明を読むことで明らかになるであろう。
【図面の簡単な説明】
【0057】
【図1】本発明による視覚事象の検出、記録および検索のためのシステムの説明的実施例を示す。この場合、事象は製造ラインを移動する物体の不良ラベルの適用に相当する。
【図2】本発明による事象を検出するシステムのための典型的な操作サイクルを説明するタイムラインを示す。
【図3】例示的実施形態により実施される分析手順を説明するフローチャートを示す。
【図4】例示的実施形態において、視覚事象検出のために証拠がどのように加重されるかを示す。
【図5】例示的実施形態において事象検出のために収集されて使用されるデータを示す。
【図6】本発明によるシステムの概要図を示す。
【図7】本発明によるシステムの一部として使用できるビジョン検出器の説明的実施例のブロック図を示す。
【図8】例示的実施形態において、物体が存在するかどうか、検査に合格するかどうかの判断など、証拠を加重して決定するために使用されるファジー論理要素を示す。
【図9】例示的実施形態により、フレームを分析し、決定し、入力を感知し、出力信号を制御するために使用されるソフトウェア要素(例えば、コンピュータ読み込み可能媒体のプログラム命令)のセットの組織を示す。
【図10】視覚事象検出の例示的実施形態をさらに説明するために使用される、事象検出パラメータのユーザー設定のためのHMI部分を示す。
【図11】ある物体例に誤って適用されたラベルを検出するために使用されることがある、ビジョン検出器の設定例の一部を示す。
【図12】図11の例のセットアップに対応する設定の別の部分を示す。
【図13】ラベル適用アームに対して誤った位置にある物体例を検出するために使用されることがある、ビジョン検出器の設定例の一部を示す。
【図14】図13のセットアップ例に対応する設定の別の部分を示す。
【図15】製造サイクルで、伸び不足または伸び過ぎのラベル適用アームを検出するために使用されることがある、ビジョン検出器の設定例の一部を示す。
【図16】図15のセットアップ例の伸び不足または伸び過ぎのアームを検出するためにどのように証拠を加重するかを示す。
【図17】連続ウェブの欠陥に対応する事象を検出するために本発明を設定する1つの方法を示す。
【図18】出力信号を事象の発生時間にどのように同期するかを説明するために使用されるタイミング図を示す。
【図19】ストローク事象の場合に記録時間がどのように計算されるかを示す。
【図20】出力信号のユーザー設定のためのHMIの部分を示す。
【図21】検出された事象の画像を記録するためのメモリ配列を示す。
【図22】映写スライドウィンドウと画像表示ウィンドウを含み、事象に対応して記録され検索された画像を表示するグラフィカルユーザーインターフェイスの一部を示す。
【発明を実施するための形態】
【0058】
[本発明の基本動作]
図1は、生産ラインで発生することがある一定の事象を検出して、事象の画像を記録および検索するように設定されるビジョン検出器の例示的実施形態を示す。コンベア1 00は、物体例110、112、114、116および118などの物体を運搬し、物体112のラベル120のように、各物体にラベルを貼る動作をするラベル貼り機械160を左から右に通過する。ラベル貼り機械160は、各ラベルを各物体に貼り付けるように動作する運動アーム162を含む。ラベル貼り機械160とアーム16 2は、本発明を説明する目的で示されており、必ずしも工業生産においてラベルを貼るために使用される任意の特定の機械を示すものではない。
【0059】
ラベル貼り機械160は、ときには誤動作することがあり、例えば、物体116の表面で右下角が曲がっているように、誤って貼られたラベル122が発生する。多くの工業生産ラインは、光検出器、マシンビジョンシステム、またはビジョン検出器のように、不良品116を検出して不合格にするために、ある形式の自動光電気検出を使用する。このような検査は、不良品が消費者に届けられることを防ぐことにおいて価値があるが、そもそも不良品が製造されることを防ぐためには役立たない。本発明の1つの目的は、不良品が実際に作成されていることを示す画像を提供することにより、製造技術者が不良品の原因を診断して修正することを支援することである。
【0060】
コンベア100は、物体を製造目的で運搬することに加えて、物体とビジョン検出器130の視野の間に相対的運動を発生させる。ほとんどの製造ラインでは、コンベアの動きは、ビジョン検出器130により受信でき、視覚検出器の方法と装置および本明細書で開示されるさまざまな目的で使用される、信号140を発生するシャフトエンコーダ132により追跡される。例えば、信号140は、ビジョン検出器130により、記録点と呼ばれる、物体112が架空の基準点150を交差する時点への基準として使用できる。
【0061】
ビジョン検出器130は、適切な視覚条件を基本にして、視野において発生することがある一定の事象を検出する。図1の例示的実施形態では、事象は、アーム162によりラベルを誤って貼ることに相当し、以下でさらに説明されるようにさまざまなやり方で検出できる。画像は、事象前、事象中、および事象後に記録される。製造技術者のような人間のユーザーは、ラベルが誤って貼られてしまう機械の問題を診断できるように、記録された画像を検索するために、信号142を経由して、ヒト−マシンインターフェイス134と相互にやり取りする。
【0062】
別の実施例では、ビジョン検出器を通過するのは、個別の物体ではなく、材料が連続して流れる。例えば、ウェブ上には、以下に提供される例がある。事象検出、記録および検索の目的では、個別の物体と材料の連続した流れではほとんど違いはない。
【0063】
図2は、事象を検出して画像を記録するように構成されるビジョン検出器の典型的な操作サイクルを説明するタイムラインを示す。ボックス220のような「c」のラベルが付けられたボックスは、画像の取得を表す。ボックス230のような「a」のラベルが付けられたボックスは分析を表す(分析ステップは以下でさらに分割され説明される)。例えば、分析ステップ230が取得ステップ220で取得される画像を分析するように、次の画像の取得「c」が現在の画像の分析「a」とオーバーラップすることが好ましい。このタイムラインでは、分析にかかる時間は、取得より短いように示されているが、一般的に、アプリケーションの詳細により、分析にかかる時間は取得より短いことも長いこともある。
【0064】
取得と分析が重複していれば、ビジョン検出器が画像を分析して分析する速度は、取得時間と分析時間のうち長くかかる時間により決定される。これが「フレームレート」である。
【0065】
タイムラインの部分220は第一の事象に相当し、5個の事象フレームの取得と分析を含む。第二の部分202は、第二の事象に相当し、3つの事象フレームを含む。
【0066】
本明細書に記載する例示的実施形態において、事象検出のための取得画像の分析は、次のような3つの主な下位ステップを含む。
・ある1つのフレームにおいて事象が発生している、または発生したことを示す証拠を評価するための視覚分析ステップ
・検出される事象が発生している可能性のある、「候補フレーム」と呼ばれる連続したフレームのセットを識別するためのアクティビティ分析ステップ
・検出される事象が候補フレームのセットで発生したかどうかを決定するための事象分析ステップ。
【0067】
各視覚分析ステップは、個別のフレームで事象が発生していることを示す証拠を検討する。証拠が明らかなフレームは「アクティブ」と呼ばれる。アクティブフレームの分析ステップは、例えば、分析ステップ240のように、太い枠線で示される。本明細書で検討される例示的実施形態において、この証拠は、以下および視覚検出器の方法と装置において開示されたように、フレームの1個以上の対象領域の画像分析演算により計算される、事象検出加重(以下でさらに説明される)と呼ばれるファジー論理値により表される。
【0068】
各アクティビティ分析ステップは、直近のフレームセット内で事象が発生しているまたは発生したことを示す証拠を検討する。本明細書で検討される例示的実施形態においては、事象検出は、事象が発生していることを示すなんらかの証拠があるということが明らかな「アクティブ状態」、またはそのような証拠はほとんどないことを示す「非アクティブ状態」にあることが検討される。アクティビティステップの1つの機能は、この状態を決定することである。例示的実施形態において、非アクティブ状態からアクティブ状態への移行は、アクティブフレームが発見されるときに行われる。アクティブ状態から非アクティブ状態への移行は、ある数の連続的な非アクティブフレームが発見されるときに行われる。候補フレームは、最初のアクティブフレームから始まり、最後のアクティブフレームで終わる連続的なフレームのセットを含み、その間に非アクティブなフレームを含む場合がある。アクティビティ分析ステップの別の機能は、候補フレームのセットを記述するデータを収集することである。
【0069】
その後、各事象分析ステップは、先行のアクティビティ分析ステップにより収集された証拠を確認することにより、候補フレームの間に事象が発生したことを示す証拠を検討する。本明細書で検討される例示的実施形態では、アクティブ状態から非アクティブ状態への移行が行われるたびに、事象分析ステップが実施される。候補フレームを記述するデータが確認され、事象が発生したと結論付けるに十分な証拠が明らかになれば、候補フレームは事象フレームと見なされる。記録およびその他の適切なアクションが、後述のように実施される。
【0070】
本発明の範囲内では、視覚、アクティビティ、および事象分析を実施するために、さまざまな方法が使用される。一部は以下および視覚検出器の方法と装置で説明されるが、その他の多くは当業者に明らかである。
【0071】
図2の例では、第一の事象200の事象検出は、分析ステップ240に対応する第一のアクティブなフレームでアクティブ状態に入り、分析ステップ246と248に対応する2つの連続する非アクティブフレームで終わる。分析ステップ242に対応する第一の事象である単独の非アクティブフレームは、非アクティブ状態に入るには十分ではない。
【0072】
非アクティブ状態に入るとき、例えば、分析ステップ248の終わりで、事象分析ステップが実施される。候補フレームは、分析ステップ240で始まり、分析ステップ241で終わる5個の事象フレームである。この例では、事象分析ステップは、事象が発生したという結果を出しており、第一番目のセットの記録フレーム210の記録を生じさせる。第二番目の事象202の同様な分析の結果、第二番目のセットの記録フレーム212を記録する。
【0073】
以下で説明されるように、視野を通過するときのアクティブフレームの物体の位置を検討することにより、ビジョン検出器は、事象が発生した正確な時間を表す記録時間250と252を推算する。タイムスタンプは、それぞれの記録されたフレームのために保管され、記録時間とこのようなそれぞれの記録されたフレームに対応するシャッタータイムの間の相対時間を示す。
【0074】
非アクティブ状態への移行が行われると、ビジョン検出器は、例えば、第一のアイドルステップ260と第二のアイドルステップ262のような、アイドルステップに入ることがある。このようなステップはオプションであるが、いくつかの理由により好ましいことがある。事象間の最低時間が知られている場合は、新しい事象が発生し得る直前まで、事象を探す必要はない。アイドルステップは、事象が発生できないときに、誤った事象検出の機会を削除し、アイドルステップの間、ライトをオフにできるので、照明システムの寿命を延ばすことになる。
【0075】
図3は、事象検出の分析ステップの詳細を提供するフローチャートを示す。破線枠のボックスは、フローチャートにより使用されるデータを表す。フローチャートブロックを囲む角が丸い四角は、視覚分析ステップ310、アクティビティ分析ステップ312および事象分析314などの分析の区画を示す。
【0076】
アクティブフラグ300は、アクティビティ分析ステップにより使用されるアクティブ/非アクティブ状態を保存する。アクティビティ分析ステップにより収集されたデータは、アクティブデータ302と非アクティブデータ304に保存される。アクティブフレームの値は、アクティブデータ302に直接追加される。非アクティブフレームの場合は、アクティブ分析ステップは、フレームが候補フレームのセットの一部であるかどうかは、後のフレームの状態によるので、まだ不明である。このため、非アクティブフレームの値は非アクティブデータ304に追加される。非アクティブ状態への移行が行われる前にアクティブフレームが続いて発見されれば、非アクティブデータ304はアクティブデータ302に追加されて、クリアされる。非アクティブ状態への移行の時点で残っている非アクティブデータ304は、廃棄される。両方のデータは、追加されたフレームの個数を含む。
【0077】
図3の例示的実施形態では、フローチャートは、各フレームで一度、取得ブロック320から連続ブロック324まで、何度も実行される。取得ブロック320は、フレーム取得により分析を同期化して、次のフレームの取得を現在のフレームの分析と重複させる。視覚分析ブロック322は、視覚分析ステップを実施し、取得された画像の分析から、事象検出加重dを計算する。
【0078】
次に、アクティビティ分析ステップ312が実施される。アクティブブロック330は、アクティブフラグ300をテストして、事象検出の現在の状態を決定する。事象検出が非アクティブであれば、第一の閾値ブロック340は、閾値tdに対してdを比較することにより、現在のフレームのアクティブ/非アクティブ状況を決定する。事象検出加重dが閾値tdより大きくなければ、フレームは非アクティブで、アクティブ分析は現在のフレームで終了する。事象検出加重dが閾値tdより大きければ、フレームはアクティブで、アクティブ移行ブロック342はアクティブフラグ300を設定し、初期化ブロック344は、現在のフレームの値を使用してアクティブデータ302を初期化し、非アクティブデータ304をクリアする。
【0079】
アクティブブロック330が現在の状態がアクティブであると決定すれば、第二の閾値ブロック346が、dを閾値tdに比較することにより、現在のフレームのアクティブ/非アクティブ状態を決定する。dが閾値より大きくなければ、フレームは非アクティブであり、カウントテストブロック350は非アクティブデータ304のフレームカウントを参照して、連続の非アクティブフレームのパラメータk以上が発見されたかどうかを決定する。発見されていなければ、非アクティブ更新ブロック354は、現在のフレームからの値を追加することにより(フレームカウントを1つ大きくすることも含む)、非アクティブデータ304を更新する。発見されていれば、非アクティブ移行ブロック352はアクティブフラグ300をクリアして、実行は事象分析ステップ314に続く。
【0080】
第二の閾値ブロック346が、現在のフレームがアクティブであると決定すれば、アクティブ更新ブロック360は、現在のフレームと非アクティブデータ304両方からの値を追加することにより、アクティブデータ302を更新する。そして、クリアブロック362は、非アクティブデータ304をクリアする。
【0081】
アクティビティ分析ステップ312が、アクティブ状態から非アクティブ状態への移行を行えば、事象分析ステップ314が実施される。条件ブロック370は、アクティブデータ302をテストして、事象が発生したかどうかを決定する。発生していなければ、収集データは無視されて、実行が継続する。発生していれば、事象ブロック372は、以下でさらに説明するように、記録のためのフレームを記録する。アイドルブロック374は、継続前のアイドル間、待機する。
【0082】
図4は、例示的実施形態の分析ステップをさらに説明しており、本発明の基本的操作を理解するために、図2のタイムラインと図3のフローチャートと合わせて使用する。
【0083】
図4は、例示的実施形態において、事象検出のために証拠がどのように加重されるかを説明する。上記のように、視野において事象が発生している、または発生したことを示す証拠を構成する情報は、「事象検出加重」と呼ばれる。図は、縦軸400の事象検出加重diと水平軸402のフレームカウントiの座標を示す。各フレームは、直線426のような縦線により表される。フレームカウントは、任意の整数である。
【0084】
この実施例では、diは、事象がフレームiで発生していることを示す証拠を表すファジー論理値であり、以下でさらに説明され、視覚検出器の方法と装置で説明された方法を使用して、各フレームのビジョン検出器により計算される。
【0085】
図4の例示的実施形態では、事象検出閾値tdは、0.5であるので、diが0.5以上であるフレームはアクティブフレームと見なされる。参考のため、di=0.5の線430が描かれた。アクティブフレームの事象検出加重は、点410のように、黒丸として描かれ、非アクティブフレームの事象検出加重は、点416のように、白丸として描かれる。
【0086】
図4の例では、事象検出は、フレーム422でアクティブ状態に入り、4つの連続した非アクティブフレームが見られる(この例では、非アクティブフレームカウント閾値k=3)フレーム424の後、非アクティブ状態に入る。候補フレームのセットは、フレーム422で始まり、フレーム426で終わる。隔離された非アクティブフレーム420は、非アクティブ状態への移行を発生させない。
【0087】
図5は、例示的実施形態において、アクティビティ分析ステップ312により収集され、事象分析ステップ314により使用されるデータの詳細を示すとともに、図4の例も示す。この実施例の場合、アクティブデータ302と非アクティブデータ304は、非アクティブ状態への移行がおこなわれるとき、これらのデータを計算するために十分な情報を含む。図5のそれぞれのデータは、記号500、以下でさらに説明される、値を定義する機能の記述510、および、図4の例の値が何であるかを示す例520を含む。
【0088】
事象が検出されたかどうかを決定するための証拠を加重するための方法の上記の説明は、有用な実施例の一例として意図されているが、本発明の範囲内で使用できる方法に限定されない。例えば、上記で使用された例の定数td=0.5は、任意の適した値で置換されることがある。当業者により視覚事象検出の多くの方法が追加される。
【0089】
[装置の例]
図6は、事象の視覚検出、記録、検索に使われる視覚検出器のためのハイレベル・ブロック図を示す。視覚検出器600は、適切な自動機器610に接続されることができ、そして、それは、信号620を用いて、PLC、拒否作動装置、回転符号器、および/または光検出器を含むことができる。これらの接続は、事象の検出、記録、検索の必要はないが、たとえば、視覚検出の方法と装置で教授された、追加の目的のために視覚検出器を使うことが好ましい事例に役に立つことができる。たとえば、事象が検出されたことを示すのに出力パルスを供給するのに特に好ましい場足がある。たとえば、パルスは、視覚検出器の方法と装置に教授されたように、記録時間に遅滞し、同期化し、PLC、作動装置、または、他の装置によって使われる。
【0090】
検出された事象の画像表示の検索のために、視覚検出器は、信号640を用いて、PCや携帯装置のような、ヒューマン・マシン・インターフェイス(HMI)630に接続する。HMI630は、また、設定として使われる。HMI630は、事象の検出と記録のために接続しないようにする必要があるが、もちろん、検索や表示のためには接続しなければならない。信号640は、条件に合ったフォーマット、および/ または、プロトコルで、実行され、有線または無線型で変換することができる。
【0091】
視覚検出器600により記録された事象画像は、また、自動画像分析システム650 により検索され、従来の機械視覚システムを含むが、それらに限定されない。このようなシステムは、HMI630の使用に固有の人間の分析を必要なしに、超高フレームレートで操作するために設計された視覚検出器で可能であり、更に画像の最新分析するために使われ得る。
【0092】
図7は、本発明の実行に使用できる視覚検出器の実例となる具体例のブロック図を示す。デジタル・シグナル・プロセッサ(DSP)700は、取得、分析、記録、HMI交信、視覚検出器により必要とされるいくつかの適切な機能を制御するためのソフトウェアを起動する。DSP700は、電源が取り除かれた場合、プログラムと設定情報を保持するためのプログラム、データ、および、不揮発性メモリのための高速ランダムアクセスメモリを含む、メモリ710に接続される。また、メモリ710は、それに続く検索のための記録画像を保持する。DSPは、また、自動機器、HMIインターフェイス730、照明モジュール740、撮像装置760への信号を供給するI/Oモジュール720に接続されている。レンズ750は、撮像装置760の光に敏感な要素へ画像を焦点を合わせている。
【0093】
DSP700は、デジタル計算、情報保存、ほかのデジタル要素に接続ができる装置であり、汎用コンピュータ、PLC、または、マイクロプロセッサを含むが、それらに限定されない。DSP700は、安価であるが、高フレームレートを操作するには十分な速さがあるので、好ましい。画像分析を持ち、同時に撮像装置からピクセルデータを受取り、保存ができるので、更に好ましい。
【0094】
図7の実例となる具体例では、DSP700は、マサチューセッツ州のマサチューセッツ州のノーウッドのAnalog Devicesで生産された、ADSP−BF531である。ADSP−BF531DSP700の並列周辺インターフェイス(PPI)770は、撮像装置760からのピクセルデータを受取り、メモリ710の保存のためのダイレクトメモリアクセス(DMA)チャンネル772を通して、メモリ・コントローラー774へデータを送る。適切なソフトウェア制御の下で、PPI770とDMA772の使用は、DSP700により実行されたその他の分析で同時に画像取得させる。PPI770とDMA772で制御するためのソフトウェア命令は、ADSP−BF533 Blackfin Processor Hardware Reference(品番82−002005−01)とBlackfin Processor Instruction Set Reference(品番82−000410−14)に含まれる、プログラム取扱い説明書に従い、当業者により実行され、ここにある双方を参照することにより組み込まれる。ここで留意すべきは、ADSP−BF531、競合のADSP−BF532とADSP−BF533の装置が、同一のプログラム取扱い説明書を持っていて、適切な価格/実行取引を得るためにこの実例となる具体例で交互に用いられることである。
【0095】
視覚検出器による好ましい高フレームレートは、従来の技術の視覚システムで使われている撮像装置でない、撮像装置の使用を勧めている。撮像装置は、高価でない照明を用い、非常に短いシャッター時間で、操作できるように、異常に光に敏感であることが好ましい。従来の技術視覚システムよりも更に速いDSPでのピクセルデータのデジタル化、転送することができることが更に好ましい。それが、高価でなく、グローバルシャッターを持っていることがなお好ましい。
【0096】
これらの物体は、従来の技術の視覚システムで使われた撮像装置よりも、さらに高い感光性で、低い解像度を持つ撮像装置を選ぶことにより、対応することができる。図7の実例となる具体例では、撮像装置760は、カリフォルニア州サンタクララのナショナル・セミコンダクターにより製造されたLM9630である。LM9630は、典型的な従来の技術システムよりも約24倍少ない、128×100個、総計で12800個のピクセルの配列を持っている。ピクセルは、それぞれ、高い光感受性を持つ、20平方ミクロンの広さである。LM9630は、300マイクロ秒のシャッター時間でのセットが、LED照明を用い、300マイクロ秒にさせるために十分(ほとんどの場合)敏感である場合、毎秒500フレームを供給できる。この解像度は、視覚システムにははるかに低すぎると考えられるが、視覚検出器の方法と装置の物体である検出の特徴には十分である。LM9630の電気的インターフェイスとソフトウェア制御は、2004年の1月のRev 1.0のLM9630データシートに含まれる取扱い説明書に従い、当業者により実行され、それは、ここにある双方を参照することにより組み込まれる。
【0097】
照明740は、高価でないが、短くシャッター時間をするのに十分な明るさがあることが好ましい。実例となる具体例では、630ナノメートルで動作している高輝度の赤いLEDの列は、たとえば、Agilent Technologiesにより製造されたHLMP−ED25を使用している。もう一つの具体例では、高輝度の白いLEDは、好ましい照明を実行するのに使われている。
【0098】
図7の実例となる具体例では、I/Oモジュール720は、出力信号722と724、入力信号726を供給する。入力信号726は、視覚検出器の方法と装置で教授されたように、論理的な観点で適切な接続により、事象検出のために使われる。
【0099】
次の用語の画像取得装置は、デジタル画像を取得し、保存することを意味する。図7 の実例となる具体例では、画像取得装置780は、DSP700、撮像装置760、メモリ710と、関連した電気的インターフェイスとソフトウェア命令を備える。
【0100】
次の用語の分析器は、デジタル画像に限定されないものを含む、デジタルデータの分析の手段を供給する。図7の実例となる具体例では、分析器は、DSP700、メモリ710と、関連した電気的インターフェイスとソフトウェア命令を備える。
【0101】
次の用語の出力信号器は、分析器に応対する出力信号を生産するための手段を供給する。図7の実例となる具体例では、出力信号器784は、I/Oモジュール720と出力信号器722を備える。
【0102】
次の用語の処理は、いくつかの目的を対象にし、好ましい装置により実行された動作の組織的なセットに参照され、メカニズム、装置、部品、ソフトウェア、または、ファームウェア、対象とする動作を実行するために一つの場所またはいろいろな場所で連携するいかなる合成を含むが、それらに限定されない。
【0103】
実例となる具体例では、本発明で使われている様々な処理は、デジタルハードウェア要素とコンピュータソフトウェア命令の相互作用の収集により実行される。ハードウェア要素には例えば下記のようなものがある。
・好ましいコンピュータソフトウェア命令の制御の下で、汎用情報処理動作を行うDSP700
・画像、データ、コンピュータソフトウェア命令のための保存と検索動作を供給するメモリ710
・本明細書で説明する画像取得動作のような、ほかの要素と組み合わせて供給する撮像装置760
・インターフェイスと信号動作を供給するI/Oモジュール720
・ヒューマン・マシン・インターフェイスとして機能するHMIインターフェイス730。
【0104】
一実施形態において、本明細書に記載する動作を実施するためのコンピュータソフトウェア命令には例えば、下記のようなソフトウェア命令がある。
・実例となる取得と分析処理の部分を説明する、図3のフローチャートステップ
・実例となる決定論理を説明する図8のファジー論理要素
・発明を実行するのに使われるソフトウェア要素のセットを示す図9のソフトウェア要素
・いかに人間のユーザーが操作するパラメータを選択できるかを示す図10と20のグラフィカル制御。
【0105】
更に、上記に示したものは、例の一覧のみであることは、当業者により、理解されるであろう。それは、完全ではなく、好ましいコンピュータソフトウェア命令は、ここに説明されたいかなる図のために使われた処理を実行するために実例となる具体例で使われ得る。
【0106】
本明細書に記載する処理の例には、次のようなものがある。
・画像取得装置780によって実行される、取得ブロック320(図3)や本明細書に記載されているような他の動作を含む獲得処理
・図9に示されている分析器782及び好ましいソフトウェア要素により実行される、図3の部分や、視覚分析ステップ310、活動分析ステップ312、及び事象分析ステップ314のような本明細書に記載される他の動作を含む種々の分析処理
・図9に示されている分析器782及び適当なソフトウェア要素により実行される、事象ブロック372や本明細書に記載される他の動作を含む種々の選択処理
・図9に示されている分析器782及び適当なソフトウェア要素により実行される、条件ブロック370及び本明細書に記載された他の動作を含む種々の判断処理。
【0107】
当業者には明らかなように、画像取得装置780、分析器782、出力信号器784を実施するために本発明の範囲内で使用可能な、多数の代替の構成、装置、ソフトウェア命令が存在する。同様に、本明細書に記載の処理を実施するために本発明の範囲内で使用可能な多数のソフトウェア命令が存在する。
【0108】
[ファジー論理意思決定]
図8は、事象が起こっているかどうか、または、起こったかどうかを判断することを含む、証拠を検討し、判断するために、具体例で使われるファジー論理要素を示す。
【0109】
ファジー論理値は、ある特定の状態が真であるという信頼度の推定値を示す0〜1の間の数である。1の数値は、状態が真である信頼度が高いことを示し、0は状態が偽であるという高い信頼度を示し、中間値は、信頼の中間レベルを示す。
【0110】
もっと馴染みのあるニ値論理は、信頼値は、0から1に制限される、ファジー論理のサブセットである。ゆえに、ファジー論理を使うここに記載した具体例は、同等のニ値論理方法または装置で置換されるこれらの値を使い、ファジー論理方法または装置で、別のニ値論理値として使うことができる。
【0111】
ニ値論理値は、閾値を使うことにより、原測定値から得られるものであるように、ファジー論理値は、ファジー閾値を使うことにより得られる。図8を参照すると、グラフ800は、ファジー閾値を示す。X軸810は、原測定を示し、f軸814は、ファジー論理値を示し、そのxの範囲は、全ての可能な原測定で、fの値域は、0≦f≦1である機能である。
【0112】
実例となる具体例では、ファジー閾値は、機能824と826上の点に対応して、x軸、低閾値t0820、高閾値t1822で示される、2つの数を備える。ファジー閾値は、次の式で、定義することができる。
【0113】
【数1】
【0114】
ここで留意すべきは、この機能が、t1<t0である場合、よく機能することである。他の機能は、また、シグモイドのような、ファジー閾値として使うことができる。
【0115】
【数2】
【0116】
ここで、tとσは、閾値パラメータである。簡素であることが目標である具体例では、従来型ニ値閾値は、ニ値論理値を結果として、使うことができる。
【0117】
ファジー意思決定は、AND840、OR850、NOT860のファジーバージョンに基づいている。2つまたはそれ以上のファジー論理値のファジーANDは、最小値であり、ファジーORは、最大値である。fのファジーNOTは、1−fである。ファジー論理値が0か1に制限されている場合、ファジー論理値は、二進論理値に等しい。
【0118】
実例となる具体例では、真偽の決定が必要である時はいつでも、ファジー論理値は、それが少なくとも0.5である場合は、真として見なされ、0.5以下であれば、偽であると考えられる。
【0119】
当業者には明らかなように、本明細書に記載するファジー論理に関係して使用されるような値0および1に関し、臨界は存在しない。信頼の中間レベルを示す中間値として用い、いかなる数が、状態が真であることを高信頼を示すのに使い、それとは違う数が状態を偽であることを高信頼を示すのに使うことができる。
【0120】
[本発明のソフトウェア要素]
図9は、フレーム分析、判断、入力感知、および出力信号調節のために、具体例により使用される一連のソフトウェア要素の編成(例えば、コンピュータ可読媒体のプログラムインストラクション)を示す。各要素がそれぞれクラスに対応するように、C+ +等従来のオブジェクト指向プログラミング言語のクラス階層を使用して要素が実行されてもよい。しかしながら、ここで記載されるプロセスを実行するには、基準を満たすいかなるプログラミング技術および/または言語をも使用することができる。
【0121】
図示のように、ガジェットクラス900のように点線の境界線付きのクラスは、独立しては存在せず、ロケータクラス920のような具体派生クラスを構築するのに使用される抽象基本クラスである。実線で境界されたクラスは、ユーザーがアプリケーションを設定する必要がある時に、HMI630を使用して作成および破壊することができる動的オブジェクトを表す。入力950などの破線で境界されたクラスは、特定のハードウェアやソフトウェアリソースと関連する静的オブジェクトを表す。静的オブジェクトは常に存在するものであり、ユーザーによって作成または破壊されることは不可能である。
【0122】
すべてのクラスは、ガジェットクラス900から派生しているため、図9に示すクラスのインスタンスであるすべてのオブジェクトはガジェットの一種である。具体例においては、各ガジェットは、1.ユーザーが選択することのできる名前を有し、2.他のガジェットが判断および出力信号を制御するために、論理入力として使用することができる論理出力(ファジー理論値)を有し、3.ユーザーが操作を特定するために構成することができる一連のパラメータを有し、4.論理出力(すなわちファジーNOT)を反転するのに使用可能な、そのようなパラメータをひとつ有し、5.実行可能であり、そのパラメータ、該当する場合は論理入力、ある種のガジェットについては現行フレームのコンテンツに基づいて論理出力が更新され、また出力信号の設定のような副作用を引き起こすことがある。
【0123】
フレーム分析作業には、ガジェット実行前に、ガジェットへのすべての論理入力が更新されたことを保証するために確定された順序で、各ガジェットを一度実行することが含まれる。ある実施例においては、その論理出力が必要ではないフレームの間はガジェットが実行されない。
【0124】
写真クラス910は、論理出力が現行フレームのコンテンツに依存するすべてのガジェットの基本クラスである。これらのクラスは実際に画像分析を行うクラスである。各写真は現行フレームの関心領域(ROI)のある特徴を測定する。ROIは、検査される物体の可視機能に対応する。この測定は写真のアナログ出力と呼ばれる。写真の論理出力は、感度閾値と呼ばれる、ユーザーによって構成されることができる一連のパラメータ中に存在するファジー閾値を用いて、アナログ出力から計算される。写真の論理出力は、判断を下す際に使われる証拠を提供するのに使用可能である。
【0125】
検出器クラス930は、ROIにおける測定および判断を下す際の証拠を提供することを主目的とする写真の基本クラスである。具体例においては、すべての検出器ROIは円型である。円形のROIは、回転を処理する必要がないため実行を簡素化し、またROIの形が1つしかないことで、ユーザーが学習すべきことを簡素化する。検出器パラメータにはポジションおよびROIの直径が含まれる。
【0126】
輝度検出器940はROIにおける加重平均やパーセンタイル輝度を測定する。コントラスト検出器942はROIにおけるコントラストを測定する。エッジ検出器944は、特定方向において、ROIがエッジのように見える領域を測定する。スポット検出器946は、ROIが穴のような丸い特徴に見える領域を測定する。テンプレート検出器948は、ROIがユーザーが選択した、事前にトレインされたパターンのように見える領域を測定する。検出器の操作については、視覚検出器の方法および装置においてさらに記述する。
【0127】
ロケータクラス920は、2つの主目的を持つ写真を表す。1つ目は、判断を下す際の証拠を提供することが可能な論理出力を生成することであり、これにより、他のいかなる検出器のようにも使用することができる。2つ目は、視覚検出器の視野にあるオブジェクトの位置を決定することにより、他の写真のROIのポジションを、オブジェクトのポジションを追跡するように移動することができることである。どのロケータも、1つのまたは両方の目的に使用することができる。
【0128】
具体例においては、ロケータは、フレーム内における一次元領域でエッジを検索する。検索方向は、エッジに向かって垂直であり、ユーザーによって設定されるパラメータの中にある。ロケータのアナログ出力はエッジ検出器のアナログ出力と似ている。ロケータについては視覚検出器の方法および装置においてさらに記載される。
【0129】
他の実施形態において、ロケータは、転換、回転、および、自由度のサイズを含む既知の方法を用いて、多次元検索範囲を検索する。適切な方法には、多年にわたり市販のものである既知の技術であるすべてである、正規化相関関係、汎用のハフ変換、幾何学模様補修に基づいたものを含む。多次元ロケータの具体例は、2004年11月2日に出願された、Brian Mirtich氏とWilliam M. Silver氏による、参照することにより本書にはっきりと組み込まれる教授法である、「製造ライン情報を用いた視覚検出器のパラメータの設定のための方法」と題する、同時係属の米国特許出願番号10/979,535に記載されている。
【0130】
入力クラス950は、事象検出に影響を与えるものとして使われる、視覚検出器に送られる入力信号を表す。出力クラス952は、事象が検出されるPLCまたは、作動装置を通知するために使われる可能性のあるような、視覚検出器からの出力信号を表す。実例となる具体例では、各物理的入力に対して、典型的入力信号726(図7)のような、入力クラスの静的インスタンスが1つ、および、各物理的出力に対して、典型的出力信号722および724のような、出力クラスの静的インスタンスが1つ存在する。視覚検出の方法と装置で教えられているように、外部自動装置は、事象が起こった場合、いつ、遅延時間を利用し、または、どこで、エンコーダカウントを用いるか、決定することができるので、出力は、記録時間を同期化する遅延パルスを形成することができる。
【0131】
ゲートベースクラス960はファジー論理の意思決定を実行する。各ゲートは、他のガジェットの論理出力に接続可能な論理入力を1つ以上有する。各論理入力は、ユーザーが設定可能なパラメータを用いて、反転(ファジーNOT)することが可能である。ANDゲート962は、ファジーAND操作を実行し、ORゲート964は、ファジーOR演算を実行する。
【0132】
判断クラス970は、意思決定するために連続フレーム上の証拠を検討するオブジェクトの基本クラスである。本発明の実例である具体例では、活動分析ステップ312 と事象分析ステップ314(視覚分析ステップ310は、下記に与えられた例に用いた、写真、入力、および/または、ゲートの合成により実行される)を実施する目的を持つ事象検出判断972を含む。判断のほかのタイプは、そこに与えられた機能と、ここに与えられたように事象検出を組み合わせるために好ましい具体例に存在することにより、視覚検出の方法と装置で教授されている。
【0133】
それぞれの判断は、ユーザーが写真、または、たいてい写真とほかのゲートである、ガジェットの論理結合を与える、さらに典型的なゲートの論理出力を接続するために論理入力を持つ。事象検出判断の論理入力は、各フレームに事象検出加重を与える。本発明の具体例は、下記に与えられた一例で、事象検出判断よりも使う可能性のあることが明らかに考えられる。
【0134】
事象検出判断の論理出力は、いつ事象が検出されたのかを示すパルスを提供する。パルス立ち上がりは、例えば図2の分析ステップ248の終了時などの、事象分析ステップ314が事象を検出する時に発生し、立ち下がりは、例えばアイドルステップ260の終了時などの後に発生する。
【0135】
図10は、事象検索判断のためのパラメータを設定するために、ユーザーが見て操作するようにHMIに表示されるグラフィカル制御を示す。ガジェットパラメータを設定するためのHMI630に表示されているグラフィカル制御のセットは、パラメータビューと称する。
【0136】
ネームテキストボックス1000は、ユーザーにこの事象検出判断のための名前の閲覧と入力を可能にする。時間表示1002は、この事象検出判断の最新起動でかかった時間を示す。論理出力ラベル1004は、この事象検出判断の現在の論理出力値を示し、真(≧0.5)と偽(<0.5)であるかを見分けるための色、形、または、ほかの指標に変えるかもしれない。反転チェックボックス1006は、反転させるためにこの事象検出判断の論理出力をさせる。ここで留意すべきは、ネームテキストボックス1000、時間表示1002、論理出力ラベル1004、反転チェックボックス1006は、視覚検出の方法と装置でさらに説明したように、全てのガジェットタイプのためのパラメータビューでは、一般的であることである。
【0137】
アイドルタイムスピナー1020は、アイドルステップ260(図2)や図3のアイドルブロック374で示されているように、ユーザーに時間間隔を特定させる。消失フレームスピナー1030は、無効状態へ転換させる活動分析ステップ312なしに受け入れる連続無効フレームの最大数をユーザーに特定させる。消失フレームスピナー1030により特定された値は、図3のカウントテストブロック350にあるパラメータkとして使われる。
【0138】
マーキング制御1040は、更に個々に説明されているように、記録時間を計算するためにフローとストローク事象間でユーザーに選択させる。記録時間を計算するために、ユーザーは、ロケータリストコントロール1042を使ってロケータを特定しなければならない。
【0139】
記録間隔制御1050は、事象が検出された場合、記録時間に関係して画像が記録された時間間隔をユーザーに特定させる。示されていない、代替実施例においては、ユーザーは、事象フレームが記録されたかどうか、事象フレームが記録される前後のフレーム数を特定する。
【0140】
状態テキスト1010は、状態ブロック370によりテストされ、事象が起こったかどうか決定するための事象分析ステップ314により使われた事象状態をユーザーに特定させる。図10の具体例では、状態テキスト1010は、Cのように従来のプログラミング言語により使われ、似ている構文で論理表現を示すテキスト文字列を含む。活動統計302からの真偽値の算出を特定するために、その表現は活動統計302の要素に表し、数値定数、論理、比較、算術演算子、丸括弧のような句読法を用いて、図5からシンボル500を組み合わせる。このようなテキスト文字列に基づいて真偽値を計算する方法は、既知の技術である。
【0141】
図10の実例となる例では、少なくとも2つの候補フレームがあり、平均事象検出加重は0.50以下または、0.75以上である場合、事象は起こる。このような状態が役立つ例は、下記で説明された図15と16に示されている。
【0142】
[具体例の有用な例]
図11は、いかに写真が不適用ラベル122(図1)のような、不適用ラベルを用いて、物体に対応する事象を検出するのに使われるかの例を示す。図11は図1より物体116に対応する、物体1100のイメージを表しており、ラベル機構1110とともに、写真を表す重畳グラフィックスを有し、それはユーザーが見て操作できるようにHMI630に表示される。HMI上での画像および重畳グラフィックスの表示は画像表示と呼ばれる。
【0143】
ロケータ1120は、物体の上端を検出して位置を確認するために使用され、別のロケータ1122は右端を検出して位置を確認するために使用される。輝度検出器1130は、物体の存在を検出する助けとなるように使用される。この例では、背景は物体より明るく、感度閾値が2つの明るさのレベルを区別するように設定されており、より明るい背景ではなく、より暗い物体を検出するために論理出力が反転されている。
【0144】
後にさらに記載されるように、ロケータ1120および1122、そして輝度検出器1130は、ともに物体が存在することを判断するのに必要な証拠提供する。明らかに、「不適用ラベルを持つ物体」に対応する事象は、事象が存在しない場合、起こらない。
【0145】
エッジ検出器1160は、ラベル1110の存在および位置を検出するのに使用される。ラベルが存在しなかったり、水平に間違った位置にあったり、著しく回転し、示されたような曲がったカマーがあり、または、さまざまなほかの方法で不適用になった場合は、エッジ検出器のアナログ出力は非常に低くなる。もちろん、ラベル1110が、エッジ検出器1160により検出されない、不適用であることが多々あるので、ほかの写真は、いかなる与えられた生産状況で故障を検出する必要があるときに使われる可能性がある。
【0146】
たとえば、輝度検出器1150は、正しいラベルが貼られたかどうかを確認するために使用される。この例では、正しいラベルは白であり、誤ったラベルは暗い色をしている。
【0147】
物体が視覚検出器の視野を通って左から右に移動すると、ロケータ1122が物体の右端を追跡し、物体に対して正しい位置になるよう、輝度検出器1130、輝度検出器1150、およびエッジ検出器1160を再配置する。ロケータ1120は、検出器を物体の上端の位置に基づいて再配置し、視野内の物体のいかなる垂直位置の変動をも修正する。一般的に、ロケータはどのような位置にでも配置することができる。
【0148】
ユーザーは、既知のHMI技術を使用して、画像表示内で写真の操作をすることができる。写真はマウスをクリックすることにより選択可能であり、またドラッグすることにより、そのROIは移動、サイズ変更、および回転が可能である。ロケータに関する付加的な操作は、視覚検出器の方法および装置で記載される。
【0149】
図12は、図11の設定例に対応する配線図を含む、論理ビューを示す。配線図は、自動装置への事象とインターフェイスを検出するのに使用されるすべてのガジェット、およびガジェットの論理入力・出力間の接続を示す。配線図は、ユーザーが見て操作するようにHMI630に表示される。ガジェットの表示およびそれらのHMIにおける論理的相互接続は論理ビューと呼ばれる。
【0150】
さらに図12の配線図について言及すると、「トップ」という名前のロケータ1220は、図11の画像表示内のロケータ1120に対応して、ワイヤー1224によりANDゲート1210に接続される。同様に、「サイド」ロケータ1222は、ロケータ1122に対応して、「ボックス」検出器1230は、輝度検出器1130に対応して、またANDゲート1210に配線される。小円1232で示されるように、および上記の通り、明るい背景に対してより暗い物体を検出するために、「ボックス」検出器1230は反転されている。
【0151】
配線図において、輝度検出器「ラベル」1250は輝度検出器1150に対応して、そしてエッジ検出器「ラベルエッジ」1260はエッジ検出器1160に対応して、ANDゲート1212に配線される。ANDゲート1212の論理出力は、ラベル1210が不適用であることを信頼性のレベルで表すように転換され、ANDゲート1210に配線される。
【0152】
ANDゲート1210の論理出力は、物体が存在することを信頼性のレベルで表し、そのレベル、すなわち、事象が起こる信頼性のレベルが不適用であることを表す。ANDゲート1210の論理出力は、各フレームに対する事象検出の加重として使用されるため、事象検出判断1200に配線される。多くの代替事象状態は、また、アプリケーションの状況により適切であるが、この構成で適切な事象検出判断1200の事象状態は、「n>=3 かつ m>=0.5」である。
【0153】
事象検出判断に配線するガジェットの選択は、アプリケーションの知識に基づきユーザーによって行われる。図11および12の例においては、ユーザーは上および右だけを検出するのでは、物体の存在を確認するのに分ではないと決定したかもしれない。ここで留意するべきなのは、ロケータ1122は、物体の右端に反応するのと同じように、ラベルの左端にも反応するかもしれないこと、そしておそらくこの時点で、プロダクションサイクルにおいて、ロケータ1120が背景で他のエッジを発見したかもしれないということである。検出器1130を加えること、またANDゲート1210を用いて3つすべての条件を満たすことで、事象の検出は信頼性の高いものになる。
【0154】
事象が検出された場合、画像は更に下記に説明されたように記録されるかもしれない。明らかに、事象フレームより前に時間に対応する画像は、いかにラベルが不適用であるかを正確に示す可能性が最も高い。視覚検出器がラベルが貼られる場所が実用的である限り近くで、物体を見ることができるように置くことがこの例では明らかに好ましい。
【0155】
事象検出判断1200の論理出力は、「シグナル」という名前の出力ガジェット1280に配線され、それは、PLCまたは、作動装置のような、自動装置に接続された場合、必要に応じて、視覚検出器から出力信号を制御する。出力ガジェット1280は、さらに視覚検出器の方法と装置に説明されたように、適切にユーザーにより構成される。自動装置は、事象が起こった場合、いつ、時間を利用し、どこで、エンコーダカウントを用いるか、決定することができるので、視覚検出器の方法と装置で教授されたように、出力ガジェット1280は、記録時間を同期化する遅延パルスを形成することができる。
【0156】
ユーザーは既知のHMI技術を使うことにより、論理ビュー内でガジェットを操作することができる。ガジェットはマウスをクリックすることにより選択可能であり、そのポジションはドラッグによって移動可能、そしてワイヤーはドラッグ・ドロップ操作により作成が可能である。
【0157】
当業者は、ガジェットの適切な選択、設定、および配線により、様々な事象が検出可能であるということを認識するであろう。当業者はまた、ガジェットクラス階層が本発明を実行するのに使われる多くのソフトウェア技術のなかの唯一のものであることを認識するであろう。
【0158】
図13は、図1で示される生産設定に有用である可能性のある事象を検出するための視覚検出器のもう一つの構成に対応する画像表示を示す。この例では、表示アーム162が十分に延長されたが(そのストロークの先端)、物体1300は、ラベル1310を受取るために不正確な配置である場合、事象が起こる。アームエッジ検出器1340は、表示アーム162のストロークの先端に対応して視野内の位置に配置される。ここで留意するのは、この位置が視野に関連するように固定され、それが、製造ラインで動かないので、ロケータを使用する必要がないことである。トップエッジ検出器1320とサイドエッジ検出器1330は、物体1300がストロークの先端で好ましい位置にあることを確認するために使われる。
【0159】
図14は、表示アーム162のストロークの先端で間違った位置に物体が対応して、事象を検出するために、図13の画像表示に対応してガジェットの構成を示す論理図である。「アーム」1440は、アームエッジ検出器1340に対応し、「トップ」1420はトップエッジ検出器1320に対応し、「サイド」1430は、サイドエッジ検出器1330に対応する。
【0160】
図14に示されるように、変換されたANDゲート1412と配線されたANDゲート1410を用いて、事象検出判断1400は、物体1300がアーム162がストロークの先端であるときに、トップエッジ検出器1320とサイドエッジ検出器1330の少なくとも一つにより特定された位置でないことを信頼性のレベルで表す事象検出加重を受取る。この構成の場合、適切な事象検出判断1400の事象状態は、「n>=2」である。
【0161】
事象が検出された場合、画像は更に下記に説明されたように記録されるかもしれない。さらに、事象検出判断1400の論理出力は、「シグナル」という名前の出力ガジェット1480に配線され、それは、PLCまたは、作動装置のような、自動装置に接続された場合、必要に応じて、視覚検出器から出力信号を制御する。出力ガジェット1280は、さらに視覚検出器の方法と装置に説明されたように、適切にユーザーにより構成される。
【0162】
図15は、図1で示される生産設定に有用である可能性のある事象を検出するための視覚検出器のさらにもう一つの構成を形成する画像表示と対応する論理表示を示す。この例では、表示アーム162事象が拡張されない、または、拡張しすぎる表示アーム162が、ストロークの先端が間違った場所にある場合、または、それが正しい位置に延長してあるが、正しいラベルアプリケーションのために短すぎたり長すぎたりしてそこにある場合、事象が起こる。
【0163】
過剰外延化は検出するのが易しい。エッジ検出器1512は、表示アーム162の下方ストロークの予期された先端の下に配置されている。対応する論理表示エッジ検出器「ハイパー」1540は、「ハイパー事象」事象検出判断1570に配線され、それは、拡張しすぎるアームを検出するために事象状態「w>=0.95」を使う可能性がある。ここに留意すべきは、総計事象検出加重wを使い、この事象状態は、そのフレームの事象検出加重がとても高い信頼性を示す場合、十分な証拠として単一フレームを受入れ、事象検出加重が低い信頼性を示す場合、少なくとも2つのフレームを必要とすることである。
【0164】
そのほかの状態では、ロケータ1500は、表示アーム162が先端付近の位置の範囲内であることを検出するために配置され、エッジ検出器1510は、表示アーム162が先端であることを検出するために配置される。対応する論理表示ロケータ「ストロ−ク」1520と反転したエッジ検出器「アペックス」1530は、ANDゲート1550に示されているように配線され、それは、事象検出判断「ストローク事象」1560に次々に配線される。この構成で事象検出加重は、表示アーム162が近くにあるが、そのストロークの先端ではないことを信頼性のレベルで表す。
【0165】
ここに留意すべきは、図15の論理表示は、2つの事象検出判断の使用を含むことである。判断のいずれかが十分な証拠を見つけた場合、事象は検出されるので、一つ以上の事象検出判断が使われた場合、それぞれは、独立して操作される。各判断は、活動フラッグ300、有効統計302、無効統計304のコピーを用い、それ自身の有効分析ステップ312と事象分析ステップ314を操作する。ここに留意すべきは、視覚分析ステップ310は、写真やゲートのようなほかのガジェットにより操作されることである。
【0166】
図16は、たとえば、図15の適切な構造である事象検出判断「ストローク事象」1560のために、いかに事象が明確に示されているかを示す。上記に説明された図4に示されるプロットに似ている事象検出加重di対フレームカウントIの4つのプロットが示されている。
【0167】
第一プロット1600は、拡張されていないアームを示す。アームは、約12のフレームで要求先端に近づくように動いたが、実際は先端に到達しなかった。第二プロット1610は、正しいラベルアプリケーションのために、要求先端に延長したが、唯一つだけフレームをそこに短すぎて残った、アームを示す。第三プロット1620 は、正しく延長され、要求先端に到達し、約3つのフレームのためにそこに残った、アームを示す。第四プロット1630は、長く延長され、要求先端に到達し、約7つのフレームのためにそこに残った、アームを示す。
【0168】
図10の事象状態「n>=2 かつ (a<.50|a>.75)」は、第一プロット1600、第二プロット1610、第四プロット1630の検出には適しているが、正しいアームの延長に対応する第三プロット1620では検出されない。「a<.50」の項は、第一プロット1600と第二プロット1610で検出される。「a>.75」の項は、第四プロット1630で検出される。「n>=2」の項は、単一フレームの偽の事象が検出されないことを約束する。
【0169】
明らかに、表示アーム162のような、機械機器の誤った延長を検出するのに好ましく、当業者に起こるであろう、多くのほかの構成と事象状態がある。図17は、継続のウェブ上に欠陥の画像を検出し、記録するための発明を構成する一つの方法を示す。画像表示1710は、視覚検出器を通過している継続ウェブ1700の一部を示す。
【0170】
ロケータ1720とエッジ検出器1722は、ウェブを検査するために構成されている。ウェブが壊れたり、折り重なったり、どちらかの端に実質的に擦り切れている場合、ロケータ1720、および/または、エッジ検出器1722は、偽の出力(論理値<0.5)を形成するであろう。ウェブが、上下に移動する場合、ロケータ1720は、トップエッジを追跡したり、下端を検出するために関連する右の位置にエッジ検出器1722を備え付けるだろう。しかし、ウェブの幅が実質的に変わる場合、エッジ検出器1722は、偽の出力を形成するだろう。
【0171】
論理表示では、「トップ」ロケータ1740は、ロケータ1720を表し、「ボトム」ロケータ1750は、エッジ検出器1722を表す。これらは、ANDゲート1760に接続され、その論理出力は、事象検出判断1770で反転され、配線される。
【0172】
[マーキング、ストローク事象、同期化出力]
図18は、ビジョン検出器の出力信号が記録時間とどのように同期化されることがあるかを説明するために使用するタイミング図を示す。信号の同期化は、ダウンストリーム作動装置の制御など、さまざまな工業検査の目的において望ましい。
【0173】
視覚事象検出は、新しい機能であるので、新しい出力信号制御を提案する。ビジョン検出器は、直接的に、または、PLCへの入力として機能することにより、一部の外部作動装置を制御できることが望ましい。これは、出力信号のタイミングが、物体が生産フローにおいて特定の固定点を通過するとき(フロー事象)、または、機械構成要素がストロークの頂点に到達するとき(ストローク事象)など、何らかの物理的手段によってある時間に一定の正確さで関係付けられることを示唆する。図1の例では、固定点は記録点150が可能であり、図2のタイムラインでは、時間は記録時間250と252である。図15の例では、エッジ検出器1510は、ラベル貼り付けアーム162のストロークの頂点に位置する。図18では、時間は記録時間1800である。エンコーダのカウントが時間の代わりに使用されることがある。
【0174】
本発明は、作動装置を直接制御している場合でも、PLCまたはその他任意の外部装置により使用されている場合でも、記録時間と一定の正確さで同期化された出力を提供できる。しかしながら、1つの問題は、本発明は、発生してから何ミリ秒かの後、つまり、記録時間のミリ秒後に事象を検出することである。さらに、遅れは、それほどではないにしても、取得/分析サイクルにおいて記録時間がいつ発生するかは、何個のフレームが分析されるかに応じて非常に変化することがある。
【0175】
図18は、事象検出論理出力1840を示す。検出パルス1870は、決定が決定点1810で行われるとき、事象検出論理出力1840に表示される。決定点1810は、図3のフローチャートの事象ブロック372が実行される時点に対応する。記録時間1800から決定点1810までの決定の遅れ1830は、それほどではないにしても、分析されるフレームの個数に応じて、取得/分析サイクルにおいて記録時間がいつ発生するかは、変化することがある。従って、検出パルス1870のタイミングは、事象がいつ発生したかに関する正確な情報を伝達しない。
【0176】
可変する決定の遅れ1830の問題は、画像を取得して分析することにより、事象を検出しようとするすべての装置に適用される。また、事象がいつ発生したかを示す信号を、フレーム周期(フレームレートの逆数)よりも高い正確度で提供することが好ましい場合に適用する。本発明は、記録時間1800を測定してから、出力信号1860の出力パルス1880を記録時間に同期化することにより、この問題を解決する。
【0177】
出力パルス1880は、記録時間1800から固定された出力の遅れ1820で発生する。記録時間の測定動作は「マーキング」と呼ばれる。記録時間は、適切な探知器により決定されると、画像、物体の知られている位置、機械構成要素または視野で運動している物体が取得されると知られている時間(またはエンコーダのカウント)を使用して、線形補間、最小二乗フィット、またはその他のよく知られている方法よりもはるかに高い正確度で決定できる。正確度は、シャッタータイム、取得/分析サイクルの全体時間、移動速度、およびその他の要素により異なる。
【0178】
例示的実施形態では、ユーザーは、検索範囲がマーキングのために使用される移動方向と実質的に同じ1つの探知器を選択する。フロー事象の場合は、マークポイントは、上記のように、探知器の範囲の中央になる点が任意に選択されるが、記録点は、固定されている限り正確な位置が問題にならない架空の基準点である。ユーザーは、この任意の時間からの遅れを調節することにより、出力信号の好ましい同期を実現できる。
【0179】
事象が検出されてもアクティブフレームの間に運動が記録点を交差しなければ、記録時間は、推定が基本になるので、正確度は低くなることがある。ストローク事象の場合、記録点は、ストロークの頂点であり、以下で説明されるように測定される。記録点のその他の定義は、本発明を実践するために使用できることが明らかである。
【0180】
出力信号は、出力の遅れ1820が決定予想の最大の遅れ1830よりも長ければ、記録時間とだけ同期できることに注意する。このように、出力パルス1880の結果としてとられるすべての動作は、例えば、作動装置の操作のように、記録点の十分なダウンストリームになければならず、ほとんどすべてのアプリケーションの場合に想定される。
【0181】
図19は、ストローク事象の場合の時間関数としての探知器の結果のグラフを示す。探知器は、例えば、図15の探知器1500のように、ストローク方向と実質的に並行な方向で検索するように構成されなければならない。検索される次元がストローク方向と実質的に並行な方向を含む限り、多次元の探知器も使用できることに注意する。任意の基準点から測定される時間が水平軸1900に描かれる。探知器の論理出力は、白抜きの点1920および塗りつぶされた点1922など、四角いポイントの連続として描かれ、探知器位置曲線1950により結ばれる。フレームに対応する四角い点が描かれた別々の時間だけで、探知器は位置を測定する。従って、探知器の位置曲線1950は、読み手の任意に描かれると理解され、探知器による連続的な測定を表さない。四角い点の縦の位置に対応する論理出力値は、第一の縦軸1910に描かれる。白抜きの点1920などの白抜きの四角い点は、探知器が対象の画像の特徴を見つけたという確信がほとんどない場合の低い論理出力値(0.5未満、例示的実施形態の基準線1914に相当する)を表す。塗りつぶされた点1922などの黒い四角い点は、探知器が対象画像の極超を見つけたという強い確信がある場合の高い論理出力値(例示的実施形態では0.5以上)であり、従って、測定位置が有効であることを示す。
【0182】
測定された探知器の位置は、位置ポイント例1930など、黒丸として描かれた位置点の連続として描かれる。位置点の縦の位置に対応する位置の値は、第二の縦軸1912に描かれて、探知器の中央からのピクセルで測定される。位置点は、探知器の論理出力が0.5以上の場合のフレームだけ、つまり、探知器が対象画像の特徴を発見したという強い確信があるフレームだけに、表示されることに注意する。
【0183】
視野の機械的構成要素が、探知器の検索範囲を、頂点に向かって、約+6ピクセルで、約4個のフレーム分前進し、約6個のフレーム分、その頂点で維持されてから、検索範囲を超える前に別の4個のフレーム分後退した位置ポイントを確認することによりわかる。このストローク事象の特定の記録時間を計算するために、例示的実施形態は、位置ポイントを使用して、最適な放物線1940を計算すると、放物線1960の頂点が容易に決定される。説明的例では、記録時間(最適放物線の頂点)は、19.2ミリ秒で発生する。
【0184】
ポイントのセットから最適放物線を計算するための方法は、技術的によく知られている。当業者には、本発明の範囲内において、ストローク事象の頂点を決定するためのその他の方法を使用できることが明らかである。さらに、本明細書で説明される方法を使用して、本明細書で検討されるフローおよびストローク事象以外の運動が追跡できること、さらに、このような運動の場合の記録時間を決定するために、適切な曲線がフィットできること、また、その他の技術を使用できることが明らかである。
【0185】
図20は、出力の遅れ1820(図18)を設定する制御などの、出力機器のユーザー設定のためのパラメータ表示を示す。モード制御2000により、ユーザーは、出力信号をどのように制御するかを選択できる。「直線」モードでは、論理入力は、遅れまたは同期が全くなく、出力信号に直接渡される。「遅延」モードでは、論理入力の上昇部分上で、出力パルスは、遅延制御2010により指定された量だけ、最も直近に測定された記録時間(またはエンコーダカウント)から遅れた時間で、および、パルス制御2020により指定された期間の間、発生するようにスケジュールされる。スケジュールされたパルスは、出力機器に関連づけられたFIFOに配置されることもある。
【0186】
[画像の記録と検索]
図21は、例示的実施形態で使用されるメモリ710(図7)の一部の組織の詳細を示す。フレームバッファプール2100は、さまざまな目的で使用される、フレームバッファ2130、2132、2134、2136および2138のようないくつかの個別のフレームバッファを含む。フリープール2110は、リングバッファとして組織されて、事象決定のためのフレームを取得して分析するために使用される。書き込みポインタ2120は、次のフレームが取得される、次に使用可能なフレームバッファ2130を示す。フレームバッファ2130への画像取得と同時に、フレームバッファ2132にある以前の画像が分析されている。ある時点で、リングバッファはいっぱいになることがあり、その時点で、古いフレームは上書きされる。
【0187】
撮像装置760がLM9630である場合の例示的実施形態では、例えば、各フレームバッファは、128x100個の8ビットピクセルを含む。図では、フレームバッファプール2100は、明確化のために、数十の要素だけを含むように示されているが、実際には、さらに多いほうが望ましい。ある実施例では、160個の要素が使用されているが、2メガバイトをやや下回るストレージが必要であり、200フレーム/秒の実行速度で約0.8秒、または、500フレーム/秒の実行速度で約0.32秒で保管する能力である。明らかに、フレームレートが低くなると、画像を保管できる時間は増加する。
【0188】
事象が検出されると、事象が発生してから多くのフレームが発生することがあるが、取得された画像の最近の履歴は、フリープール2110にある。例示的実施形態では、フリープール2110は、事象フレーム、および、アプリケーションの目的のために十分な数の事象フレームの前後のフレームを保持する十分な大きさである。事象が検出されるとき、最近の履歴は、記録制御1050のようなユーザーの選択により、記録されるフレームがない、一部、または全部を含むことがある。最近の履歴がフレームのすべてを含む場合は、以下で説明されるように、直ちに記録できる。すべてを含まない場合は、記録は、記録されるフレームのすべてが利用可能である将来の時点で発生する。
【0189】
例示的実施形態において、例2134など、「R」とマークされたフレームバッファは、記録される画像を保持し、例2136などの「E」は事象フレーム(記録される)を保持する。事象は記録時間2160で発生し、バッファ2134のフレームの分析中に検出される。事象が検出されたとき、記録されるフレームの全部ではないが、一部が最近の履歴にある。バッファ2132のフレームを後で分析中に、最近の履歴はこれで記録されるフレームすべてを含むと決定される。
【0190】
フレームを記録するために、フレームバッファはフリープール2110から削除されて、保管された事象2112、2114および2116を含む、保管された事象プール2104に追加される。新しく保管された事象を削除後にフリープール2110のフレームバッファの数が小さくなりすぎる場合は、さまざまなアクションが可能である。ある実施例では、事象検出は、バッファがフリープール2110に戻ることができるように、HMI630(図6)がフレームを保管された事象プール2104にアップロードするまで、中断する。別の実施例では、1つ以上の保管された古い事象は保管された事象プール2104から取り出されて、フリープール2104に戻されることがある。これらの古い事象は、表示することはできなくなる。
【0191】
例示的実施形態では、フレームバッファは決してコピーされない。その代わりに、フレームバッファは、技術的によく知られた技術を使用するポインタ操作により、フリープール2110と保管された事象プール2104の間を移動する。
【0192】
リスト要素2140、2142および2144など、保管された事象のリスト210 2が維持される。リスト要素2140は、例えば、次の要素ポインタ2150、フレームバッファカウント2152、結果情報2154、および保管された事象ポインタ2156を含む。結果情報2154は、図にあるようにタイムスタンプ、または、表示されていないがアクティブデータ302のような他の情報を含むことがある。
【0193】
結果情報2154は、事象全体に適用される情報を含む。保管された事象プール2104のフレームバッファで表示されている例のように、各記録されたフレームの情報を提供することがさらに好ましい。例示的実施形態では、保管された情報は、記録時間に想定的なフレームの取得時間をミリ秒単位で記録するタイムスタンプを含む。事象検出加重や個別の機器の結果のようなその他の情報(表示されていない)も記録されることがある。
【0194】
図6に戻って参照すると、ビジョン検出器は、設定を目的として、信号640を経由して人−マシンインターフェイス(HMI)630に接続されることがある。また、HMIがビジョン検出器600の一部であることも可能であるが、これは、HMIは一般的に事象検出には必要ではないため、あまり好まれない。したがって、1台のHMIは多数のビジョン検出器の間で共有できる。HMIは、図22に示される図説部分の従来の設計のグラフィカルユーザーインターフェイス(GUI)を実行することがある。
【0195】
GUIにより、ビジョン検出器のメモリ710に保管された記録された画像の一部が、人間のユーザーに表示されることが可能である。図22の例示的実施形態では、映写スライドウィンドウ2202は、8個までのサムネイル画像2210、2212、2214、2216、2220、2230、2232および2234を表示する。それぞれのサムネイル画像は、保管された事象プール2104に対応する記録された画像の低解像度バージョンである。一般的に、サムネイル画像は、記録の単独事象の連続画像に対応するが、対応するサムネイルの間の画像の何個かを省略するなど、その他の処理も有用なことがある。
【0196】
スクロール制御のセット2250は、事象の記録された画像内、または事象間で前後してサムネイル画像を移動するために映写スライドウィンドウ2202に提供される。次の画像制御2260は、画像を1つずつ進めて、以前の画像制御2262は画像を1つずつ逆に進む。次の事象制御2264と以前の事象制御2266は、事象を1つずつ前後に表示する。
【0197】
サムネイル2220は、物体116(図1)の例に対応することがある、物体224 2の低解像度画像を表示する。また、物体2242は、サムネイル2210の物体例2240のように、わずかに異なる表示視点(視野内の位置)およびアーム2272によるラベル2270の貼り付けの間異なる時間で、その他のすべてのサムネイルも表示する。スクロール制御2250を使用してスクロールコマンドを発行することにより、ユーザーは、任意の望ましい時間間隔を見るために記録された画像を前後に移動できる。特に、サムネイル2212、2214および2216にある図説の画像例を検討すると、ラベル2270は、貼られているように、物体の上端で引っかかっているように見える。
【0198】
図22の例示的実施形態では、太線で囲まれて「選択された画像」として参照されている、サムネイル2220に対応する画像も、画像表示ウィンドウ2200で最高解像度で表示される。スクロールコマンドが表示部分を前後に進むにつれて、別の選択された画像がサムネイル2220に移動して、画像表示ウィンドウ2200で最高解像度で表示される。記録時間に想定的に選択された画像の取得時間(この例のミリ秒)を示すタイムスタンプ2280のような選択された画像についてのその他の情報も表示される。
【0199】
以上は、本発明のさまざまな実施例の詳細説明である。本発明の製品および範囲から逸脱することなく、本発明にさまざまな範囲の修正や追加を行えることが明らかである。例えば、本明細書のプロセッサと計算デバイスは例であって、スタンドアロンと分散両方のさまざまなプロセッサおよびコンピュータが、開示された計算を実施するために採用できる。同様に、本明細書で記述された撮像装置やその他のビジョン構成要素は、例であって、改善されたまたは別の構成要素が本発明の開示内で採用できる。ソフトウェア要素、GUI設計およびレイアウト、パラメータ値、および数式は、すべて本発明の特定のアプリケーションに適するように同等に修正または置換できる。従って、本記述は一例を意味するものであって、本発明の範囲を限定するものではない。
【特許請求の範囲】
【請求項1】
事象の自動視覚検出のための方法であって、
複数のフレームを取得するステップであって、前記複数のフレームの各フレームは前記事象が起こる二次元の視野の画像を含み、前記事象は所定の物体の画像を含むステップと、
前記複数のフレームの視覚分析に応答して、複数の事象検出加重を計算するステップであって、前記複数の事象検出加重の各事象検出加重は、それぞれ前記複数のフレームの各フレームに対応し、前記事象が前記視野において起こっている証拠を含むステップと、
前記複数のフレームから複数の事象フレームを選択するステップであって、前記複数の事象フレームは、前記複数の事象検出加重のサブセットに対応するステップと、
前記複数の事象検出加重の前記サブセットの事象分析に応答して、前記事象が起こったかどうかを決定するステップと、
を含む方法。
【請求項2】
事象の自動視覚検出のための方法であって、
複数のフレームを取得するステップであって、前記複数のフレームの各フレームは前記事象が起こる二次元の視野の画像を含み、前記事象は固定基準点を通過する動作を含むステップと、
前記複数のフレームの視覚分析に応答して、複数の事象検出加重を計算するステップであって、前記複数の事象検出加重の各事象検出加重は、それぞれ前記複数のフレームの各フレームに対応し、前記事象が前記視野において起こっている証拠を含むステップと、
前記複数のフレームから複数の事象フレームを選択するステップであって、前記複数の事象フレームは、前記複数の事象検出加重のサブセットに対応するステップと、
前記複数の事象検出加重の前記サブセットの事象分析に応答して、前記事象が起こったかどうかを決定するステップと、
を含む方法。
【請求項3】
事象の自動視覚検出のための方法であって、
複数のフレームを取得するステップであって、前記複数のフレームの各フレームは前記事象が起こる二次元の視野の画像を含み、前記事象は前進と後退の動作を含むステップと、
前記複数のフレームの視覚分析に応答して、複数の事象検出加重を計算するステップであって、前記複数の事象検出加重の各事象検出加重は、それぞれ前記複数のフレームの各フレームに対応し、前記事象が前記視野において起こっている証拠を含むステップと、
前記複数のフレームから複数の事象フレームを選択するステップであって、前記複数の事象フレームは、前記複数の事象検出加重のサブセットに対応するステップと、
前記複数の事象検出加重の前記サブセットの事象分析に応答して、前記事象が起こったかどうかを決定するステップと、
を含む方法。
【請求項4】
事象の自動視覚検出のための方法であって、
複数のフレームを取得するステップであって、前記複数のフレームの各フレームは前記事象が起こる二次元の視野の画像を含み、前記事象は前記視野を通過する不良製造物体を含むステップと、
前記複数のフレームの視覚分析に応答して、複数の事象検出加重を計算するステップであって、前記複数の事象検出加重の各事象検出加重は、それぞれ前記複数のフレームの各フレームに対応し、前記事象が前記視野において起こっている証拠を含むステップと、
前記複数のフレームから複数の事象フレームを選択するステップであって、前記複数の事象フレームは、前記複数の事象検出加重のサブセットに対応するステップと、
前記複数の事象検出加重の前記サブセットの事象分析に応答して、前記事象が起こったかどうかを決定するステップと、
を含む方法。
【請求項5】
事象の自動視覚検出のための方法であって、
複数のフレームを取得するステップであって、前記複数のフレームの各フレームは前記事象が起こる二次元の視野の画像を含み、前記事象は前記視野に物体の間違った動作を含むステップと、
前記複数のフレームの視覚分析に応答して、複数の事象検出加重を計算するステップであって、前記複数の事象検出加重の各事象検出加重は、それぞれ前記複数のフレームの各フレームに対応し、前記事象が前記視野において起こっている証拠を含むステップと、
前記複数のフレームから複数の事象フレームを選択するステップであって、前記複数の事象フレームは、前記複数の事象検出加重のサブセットに対応するステップと、
前記複数の事象検出加重の前記サブセットの事象分析に応答して、前記事象が起こったかどうかを決定するステップと、
を含む方法。
【請求項6】
事象の自動視覚検出のための方法であって、
複数のフレームを取得するステップであって、前記複数のフレームの各フレームは前記事象が起こる二次元の視野の画像を含み、前記事象は間違った位置にある物体を含むステップと、
前記複数のフレームの視覚分析に応答して、複数の事象検出加重を計算するステップであって、前記複数の事象検出加重の各事象検出加重は、それぞれ前記複数のフレームの各フレームに対応し、前記事象が前記視野において起こっている証拠を含むステップと、
前記複数のフレームから複数の事象フレームを選択するステップであって、前記複数の事象フレームは、前記複数の事象検出加重のサブセットに対応するステップと、
前記複数の事象検出加重の前記サブセットの事象分析に応答して、前記事象が起こったかどうかを決定するステップと、
を含む方法。
【請求項7】
事象の自動視覚検出のための方法であって、
複数のフレームを取得するステップであって、前記複数のフレームの各フレームは前記事象が起こる二次元の視野の画像を含むステップと、
前記複数のフレームの視覚分析に応答して、複数の事象検出加重を計算するステップであって、前記複数の事象検出加重の各事象検出加重は、それぞれ前記複数のフレームの各フレームに対応し、前記事象が前記視野において起こっている証拠を含むステップと、
前記複数のフレームから複数の事象フレームを選択するステップであって、前記複数の事象フレームは、前記複数の事象検出加重のサブセットに対応するステップと、
前記複数の事象検出加重の前記サブセットの事象分析に応答して、前記事象が起こったかどうかを決定するステップと、
前記事象が起こる時間に同期される信号を生成するステップと、
を含む方法。
【請求項8】
事象の自動視覚検出のための方法であって、
複数のフレームを取得するステップであって、前記複数のフレームの各フレームは前記事象が起こる二次元の視野の画像を含むステップと、
前記複数のフレームの視覚分析に応答して、複数の事象検出加重を計算するステップであって、前記複数の事象検出加重の各事象検出加重は、それぞれ前記複数のフレームの各フレームに対応し、前記事象が前記視野において起こっている証拠を含むステップと、
前記複数のフレームから複数の事象フレームを選択するステップであって、前記複数の事象フレームは、前記複数の事象検出加重のサブセットに対応するステップと、
前記複数の事象検出加重の前記サブセットの事象分析に応答して、前記事象が起こったかどうかを決定するステップと、
を含み、前記事象分析は、
対応する複数の論理結果を生成する複数の比較演算であって、前記複数の比較演算の各比較演算は、第一の値と第二の値の比較を含み、前記第一の値と前記第二の値のうちの少なくとも一つは、前記複数の事象検出加重の前記サブセットの数値統計に応答する比較演算と、
前記事象が起こったかどうかを決定するための前記複数の論理結果を組み合わせる少なくとも一つの論理演算と、
を含む方法。
【請求項9】
事象の自動視覚検出のための方法であって、
複数のフレームを取得するステップであって、前記複数のフレームの各フレームは前記事象が起こる二次元の視野の画像を含むステップと、
前記複数のフレームの視覚分析に応答して、複数の事象検出加重を計算するステップであって、前記複数の事象検出加重の各事象検出加重は、それぞれ前記複数のフレームの各フレームに対応し、前記事象が前記視野において起こっている証拠を含むステップと、
前記複数のフレームから複数の事象フレームを選択するステップであって、前記複数の事象フレームは、前記複数の事象検出加重のサブセットに対応するステップと、
前記複数の事象検出加重の前記サブセットの事象分析に応答して、前記事象が起こったかどうかを決定するステップであって、前記事象分析は、実質的に従来のプログラミング言語の構文に似ている構文の表現を示すテキスト文字列を含むステップと、
を含む方法。
【請求項10】
事象の自動視覚検出のための方法であって、
複数のフレームを取得するステップであって、前記複数のフレームの各フレームは前記事象が起こる二次元の視野の画像を含むステップと、
前記複数のフレームの視覚分析に応答して、複数の事象検出加重を計算するステップであって、前記複数の事象検出加重の各事象検出加重は、それぞれ前記複数のフレームの各フレームに対応し、前記事象が前記視野において起こっている証拠を含むステップと、
前記複数のフレームから複数の事象フレームを選択するステップであって、前記複数の事象フレームは、前記複数の事象検出加重のサブセットに対応するステップと、
前記複数の事象検出加重の前記サブセットの事象分析に応答して、前記事象が起こったかどうかを決定するステップと、
を含み、前記方法の前記ステップは、少なくとも毎秒200フレームの割合で実行される方法。
【請求項11】
事象の自動視覚検出のための方法であって、
複数のフレームを取得するステップであって、前記複数のフレームの各フレームは前記事象が起こる二次元の視野の画像を含むステップと、
前記複数のフレームの視覚分析に応答して、複数の事象検出加重を計算するステップであって、前記複数の事象検出加重の各事象検出加重は、それぞれ前記複数のフレームの各フレームに対応し、前記事象が前記視野において起こっている証拠を含み、前記視覚分析は、前記複数のフレームの各フレームに対し、視野の関心領域の位置を調整するための探知器を使用するステップと、
前記関心領域を分析するステップと、
を含むステップと、
前記複数のフレームから複数の事象フレームを選択するステップであって、前記複数の事象フレームは、前記複数の事象検出加重のサブセットに対応するステップと、
前記複数の事象検出加重の前記サブセットの事象分析に応答して、前記事象が起こったかどうかを決定するステップと、
を含む方法。
【請求項12】
事象の自動視覚検出のための方法であって、
複数のフレームを取得するステップであって、前記複数のフレームの各フレームは前記事象が起こる二次元の視野の画像を含むステップと、
前記複数のフレームの視覚分析に応答して、複数の事象検出加重を計算するステップであって、前記複数の事象検出加重の各事象検出加重は、それぞれ前記複数のフレームの各フレームに対応し、前記事象が前記視野において起こっている証拠を含むステップと、
複数の事象検出加重の活動分析に応答して、前記複数のフレームから複数の事象フレームを選択するステップであって、前記複数の事象フレームは、前記複数の事象検出加重のサブセットに対応するステップと、
を含み、前記活動分析は、
前記視覚分析が前記事象が起こっているという十分な証拠を示す事象検出加重を算定した場合、有効状態に入るステップと、
前記視覚分析が前記事象が起こっているという不十分な証拠をそれぞれ示す複数の事象検出加重を算定した場合、有効状態を終了するステップと、
前記複数の事象検出加重の前記サブセットの事象分析に応答し、前記事象が起こっているかどうかを決定するステップと、
を含む方法。
【請求項13】
事象の自動視覚検出のための方法であって、
前記事象を特定するためにヒューマン・マシン・インターフェイスを使うステップであって、前記ヒューマン・マシン・インターフェイスは論理目的を備えるステップと、
複数のフレームを取得するステップであって、前記複数のフレームの各フレームは前記事象が起こる二次元の視野の画像を含むステップと、
前記複数のフレームの視覚分析に応答して、複数の事象検出加重を計算するステップであって、前記複数の事象検出加重の各事象検出加重は、それぞれ前記複数のフレームの各フレームに対応し、前記事象が前記視野において起こっている証拠を含むステップと、
前記複数のフレームから複数の事象フレームを選択するステップであって、前記複数の事象フレームは、前記複数の事象検出加重のサブセットに対応するステップと、
前記複数の事象検出加重の前記サブセットの事象分析に応答して、前記事象が起こったかどうかを決定するステップと、
を含む方法。
【請求項14】
事象の自動視覚検出のためのシステムであって、
複数のフレームを取得する取得プロセスであって、前記複数のフレームの各フレームは、前記事象が起こる二次元の視野の画像を含み、前記事象は所定の物体の動作を含むプロセスと、
前記複数のフレームに応答して、複数の事象検出加重を算定する視覚分析プロセスであって、前記複数の事象検出加重の各事象検出加重は、前記複数のフレームの各フレームに対応し、前記事象が前記視野で起こっている証拠を含むプロセスと、
前記複数のフレームから複数の事象フレームを選択する選択プロセスであって、前記複数の事象フレームは前記複数の事象検出加重のサブセットに対応するプロセスと、
前記複数の事象検出加重の前記サブセットに応答して、前記事象が起こっているかどうかを決定する事象分析プロセスと、
を備えるシステム。
【請求項15】
事象の自動視覚検出のためのシステムであって、
複数のフレームを取得する取得プロセスであって、前記複数のフレームの各フレームは、前記事象が起こる二次元の視野の画像を含み、前記事象は固定基準点を通過する動作を含むプロセスと、
前記複数のフレームに応答して、複数の事象検出加重を算定する視覚分析プロセスであって、前記複数の事象検出加重の各事象検出加重は、前記複数のフレームの各フレームに対応し、前記事象が前記視野で起こっている証拠を含むプロセスと、
前記複数のフレームから複数の事象フレームを選択する選択プロセスであって、前記複数の事象フレームは前記複数の事象検出加重のサブセットに対応するプロセスと、
前記複数の事象検出加重の前記サブセットに応答して、前記事象が起こったかどうかを決定する事象分析プロセスと、
を備えるシステム。
【請求項16】
事象の自動視覚検出のためのシステムであって、
複数のフレームを取得する取得プロセスであって、前記複数のフレームの各フレームは、前記事象が起こる二次元の視野の画像を含み、前記事象は前進と後退を含むプロセスと、
前記複数のフレームに応答して、複数の事象検出加重を算定する視覚分析プロセスであって、前記複数の事象検出加重の各事象検出加重は、前記複数のフレームの各フレームにそれぞれ対応し、前記事象が前記視野で起こっている証拠を含むプロセスと、
前記複数のフレームから複数の事象フレームを選択する選択プロセスであって、前記複数の事象フレームは前記複数の事象検出加重のサブセットに対応するプロセスと、
前記複数の事象検出加重の前記サブセットに応答して、前記事象が起こったかどうかを決定する事象分析プロセスと、
を備えるシステム。
【請求項17】
事象の自動視覚検出のためのシステムであって、
複数のフレームを取得する取得プロセスであって、前記複数のフレームの各フレームは、前記事象が起こる二次元の視野の画像を含み、前記事象は前記視野を通過する不良製造物体含むプロセスと、
前記複数のフレームに応答して、複数の事象検出加重を算定する視覚分析プロセスであって、前記複数の事象検出加重の各事象検出加重は、前記複数のフレームの各フレームにそれぞれ対応し、前記事象が前記視野で起こっている証拠を含むプロセスと、
前記複数のフレームから複数の事象フレームを選択する選択プロセスであって、前記複数の事象フレームは前記複数の事象検出加重のサブセットに対応するプロセスと、
前記複数の事象検出加重の前記サブセットに応答して、前記事象が起こったかどうかを決定する事象分析プロセスと、
を備えるシステム。
【請求項18】
事象の自動視覚検出のためのシステムであって、
複数のフレームを取得する取得プロセスであって、前記複数のフレームの各レームは、前記事象が起こる二次元の視野の画像を含み、前記事象は前記視野に物体の間違った動作を含むプロセスと、
前記複数のフレームに応答して、複数の事象検出加重を算定する視覚分析プロセスであって、前記複数の事象検出加重の各事象検出加重は、前記複数のフレームの各フレームにそれぞれ対応し、前記事象が前記視野で起こっている証拠を含むプロセスと、
前記複数のフレームから複数の事象フレームを選択する選択プロセスであって、前記複数の事象フレームは前記複数の事象検出加重のサブセットに対応するプロセスと、
前記複数の事象検出加重の前記サブセットに応答して、前記事象が起こったかどうかを決定する事象分析プロセスと、
を備えるシステム。
【請求項19】
事象の自動視覚検出のためのシステムであって、
複数のフレームを取得する取得プロセスであって、前記複数のフレームの各フレームは、前記事象が起こる二次元の視野の画像を含み、前記事象は間違った位置にある物体を含むプロセスと、
前記複数のフレームに応答して、複数の事象検出加重を算定する視覚分析プロセスであって、前記複数の事象検出加重の各事象検出加重は、前記複数のフレームの各フレームにそれぞれ対応し、前記事象が前記視野で起こっている証拠を含むプロセスと、
前記複数のフレームから複数の事象フレームを選択する選択プロセスであって、前記複数の事象フレームは前記複数の事象検出加重のサブセットに対応するプロセスと、
前記複数の事象検出加重の前記サブセットに応答して、前記事象が起こったかどうかを決定する事象分析プロセスと、
を備えるシステム。
【請求項20】
事象の自動視覚検出のためのシステムであって、
複数のフレームを取得する取得プロセスであって、前記複数のフレームの各フレームは、前記事象が起こる二次元の視野の画像を含むプロセスと、
前記複数のフレームに応答して、複数の事象検出加重を算定する視覚分析プロセスであって、前記複数の事象検出加重の各事象検出加重は、前記複数のフレームの各フレームにそれぞれ対応し、前記事象が前記視野で起こっている証拠を含むプロセスと、
前記複数のフレームから複数の事象フレームを選択する選択プロセスであって、前記複数の事象フレームは前記複数の事象検出加重のサブセットに対応するプロセスと、
前記複数の事象検出加重の前記サブセットに応答して、前記事象が起こったかどうかを決定する事象分析プロセスと、
を備えるシステム。
【請求項21】
事象の自動視覚検出のためのシステムであって、
複数のフレームを取得する取得プロセスであって、前記複数のフレームの各フレームは、前記事象が起こる二次元の視野の画像を含むプロセスと、
前記複数のフレームに応答して、複数の事象検出加重を算定する視覚分析プロセスであって、前記複数の事象検出加重の各事象検出加重は、前記複数のフレームの各フレームにそれぞれ対応し、前記事象が前記視野で起こっている証拠を含むプロセスと、
前記複数のフレームから複数の事象フレームを選択する選択プロセスであって、前記複数の事象フレームは前記複数の事象検出加重のサブセットに対応するプロセスと、
前記複数の事象検出加重の前記サブセットに応答して、前記事象が起こったかどうかを決定する事象分析プロセスであって、対応する複数の論理結果を生成する複数の比較演算を含み、前記複数の比較演算の各比較演算は、第一の値と第二の値の比較を含み、前記第一の値と前記第二の値のうちの少なくとも一つは、前記複数の事象検出加重の前記サブセットの数値統計に応答するプロセスと、
前記事象が起こったかどうかを決定するための前記複数の論理結果を組み合わせる少なくとも一つの論理演算と、
を備えるシステム。
【請求項22】
事象の自動視覚検出のためのシステムであって、
複数のフレームを取得する取得プロセスであって、前記複数のフレームの各フレームは、前記事象が起こる二次元の視野の画像を含むプロセスと、
前記複数のフレームに応答して、複数の事象検出加重を算定する視覚分析プロセスであって、前記複数の事象検出加重の各事象検出加重は、前記複数のフレームの各フレームにそれぞれ対応し、前記事象が前記視野で起こっている証拠を含むプロセスと、
前記複数のフレームから複数の事象フレームを選択する選択プロセスであって、前記複数の事象フレームは前記複数の事象検出加重のサブセットに対応するプロセスと、
前記複数の事象検出加重の前記サブセットに応答して、前記事象が起こったかどうかを決定する事象分析プロセスであって、事象分析プロセスは、実質的に従来のプログラミング言語の構文に似ている構文の表現を示すテキスト文字列を含むプロセスと、
を備えるシステム。
【請求項23】
事象の自動視覚検出のためのシステムであって、
複数のフレームを取得する取得プロセスであって、前記複数のフレームの各フレームは、前記事象が起こる二次元の視野の画像を含むプロセスと、
前記複数のフレームに応答して、複数の事象検出加重を算定する視覚分析プロセスであって、前記複数の事象検出加重の各事象検出加重は、前記複数のフレームの各フレームにそれぞれ対応し、前記事象が前記視野で起こっている証拠を含むプロセスと、
前記複数のフレームから複数の事象フレームを選択する選択プロセスであって、前記複数の事象フレームは前記複数の事象検出加重のサブセットに対応するプロセスと、
前記複数の事象検出加重の前記サブセットに応答して、前記事象が起こったかどうかを決定する事象分析プロセスと、
を含み、前記取得プロセス、前記視覚分析プロセス、前記選択プロセス、および前記事象分析プロセスは、少なくとも毎秒200フレームの割合で実行する、システム。
【請求項24】
事象の自動視覚検出のためのシステムであって、
複数のフレームを取得する取得プロセスであって、前記複数のフレームの各フレームは、前記事象が起こる二次元の視野の画像を含むプロセスと、
前記複数のフレームに応答して、複数の事象検出加重を算定する視覚分析プロセスであって、前記複数の事象検出加重の各事象検出加重は、前記複数のフレームの各フレームにそれぞれ対応し、前記事象が前記視野で起こっている証拠を含み、前記視覚分析プロセスは、前記複数のフレームの各フレームに対し、前記視野の関心領域の位置を調整する探知器と、前記関心領域を分析する領域分析プロセスとを含むプロセスと、
前記複数のフレームから複数の事象フレームを選択する選択プロセスであって、前記複数の事象フレームは前記複数の事象検出加重のサブセットに対応するプロセスと、
前記複数の事象検出加重の前記サブセットに応答して、前記事象が起こったかどうかを決定する事象分析プロセスと、
を含む、システム。
【請求項25】
事象の自動視覚検出のためのシステムであって、
複数のフレームを取得する取得プロセスであって、前記複数のフレームの各フレームは、前記事象が起こる二次元の視野の画像を含むプロセスと、
前記複数のフレームに応答して、複数の事象検出加重を算定する視覚分析プロセスであって、前記複数の事象検出加重の各事象検出加重は、前記複数のフレームの各フレームにそれぞれ対応し、前記事象が前記視野で起こっている証拠を含むプロセスと、
前記複数の事象検出加重に応答して、前記複数のフレームから複数の事象フレームを選択する活動分析プロセスであって、前記複数の事象フレームは、前記複数の事象検出加重のサブセットに対応し、前記活動分析プロセスは、前記視覚分析プロセスが前記事象が起こっているという十分な証拠を示す事象検出加重を算定した場合入り、前記視覚分析プロセスが前記事象が起こっているというには不十分な証拠をそれぞれ示す複数の事象検出加重を算定した場合終了する有効状態を含むプロセスと、
前記複数の事象検出加重の前記サブセットに応答して、前記事象が起こったかどうかを決定する事象分析プロセスと、
を含む、システム。
【請求項26】
事象の自動視覚検出のためのシステムであって、
前記事象を特定するヒューマン・マシン・インターフェイスであって、前記ヒューマン・マシン・インターフェイスは論理目的を備えるインターフェイスと、
複数のフレームを取得する取得プロセスであって、前記複数のフレームの各フレームは、前記事象が起こる二次元の視野の画像を含むプロセスと、
前記複数のフレームに応答して、複数の事象検出加重を算定する視覚分析プロセスであって、前記複数の事象検出加重の各事象検出加重は、前記複数のフレームの各フレームにそれぞれ対応し、前記事象が前記視野で起こっている証拠を含むプロセスと、
前記複数のフレームから複数の事象フレームを選択する選択プロセスであって、前記複数の事象フレームは前記複数の事象検出加重のサブセットに対応するプロセスと、
前記複数の事象検出加重の前記サブセットに応答して、前記事象が起こったかどうかを決定する事象分析プロセスと、
を備えるシステム。
【請求項27】
事象の自動視覚検出および報告のためのシステムであって、
複数のフレームを取得するステップであって、前記複数のフレームの各フレームは、
前記事象が起こる二次元の視野の画像を含み、前記事象は、経路に沿った物体の動作を含み、前記経路は記録点を持ち、前記事象は前記物体が前記記録点ぶ位置している記録時間さらに含むステップと、
複数のフレームの第一の分析に応答して、前記第一の分析が、前記物体が前記複数の事象フレームの各フレームために、前記物体が前記経路に沿って位置しているという十分な証拠を示すように、前記複数のフレームから複数の事象フレームを選択するステップと、
前記複数の事象フレームに対応する複数の取得時間を得るステップであって、前記複数の取得時間の各取得時間は、対応する事象フレームが取得された時間の機能であるステップと、
前記複数の事象フレームの第二の分析に応答して、複数のロケーション値を算定するステップであって、前記複数のロケーション値の各ロケーション値は、前記第二の分析により計算されるように、関連事象フレーム内で前記経路に沿って前記物体の位置に応答するステップと、
前記複数のロケーション値と前記複数の取得時間を使い、記録時間を決定するステップと、
遅延間隔により、記録時間に続くレポートタイム時に信号を生成するステップと、
を含む方法。
【請求項28】
前記複数の取得時間の各取得時間は、対応する事象フレームが取得された時に得られたエンコーダカウントである、請求項27に記載の方法。
【請求項29】
前記記録時間を決定するステップは、曲線を前記複数のロケーション値と前記複数の取得時間に適合させるステップを含む、請求項27に記載の方法。
【請求項30】
前記曲線は、放物線である、請求項29に記載の方法。
【請求項31】
前記曲線は頂点を有し、
前記記録時間を決定するステップは前記曲線の前記頂点を決定するステップを含む、請求項29に記載の方法。
【請求項32】
前記事象はフロー事象を含み、前記フロー事象は、前記記録点を通して前記物体の動作を含む、請求項27に記載の方法。
【請求項33】
前記事象はストローク事象を備え、前記ストローク事象は、前記経路沿いの前進と後退の動作を含む、請求項27に記載の方法。
【請求項34】
前記経路は頂点を持ち、前記記録点は、前記経路の頂点である、請求項27に記載の方法。
【請求項35】
前記複数のフレームは取得され、前記第一の分析と前記第二の分析は少なくとも毎秒200フレームの割合で実行される、請求項27に記載の方法。
【請求項36】
複数の事象タイプから事象タイプを選択するステップであって、前記事象タイプは、前記経路に沿った前記物体の前記動作に対応するステップをさらに含み、
前記記録時間を決定するステップは前記事象タイプに応答する、請求項27に記載の方法。
【請求項37】
事象の自動視覚検出および報告のためのシステムであって、
複数のフレームを取得する取得プロセスであって、前記複数のフレームの各フレームは、前記事象が起こる二次元の視野の画像を含み、前記事象は、経路沿いに物体の動作を含み、前記経路は記録点を持ち、前記事象は、前記物体が前記記録点に位置している記録時間をさらに含むプロセスと、
前記複数のフレームから複数の事象フレームを選ぶ第一の選択プロセスであって、前記第一の選択プロセスが、前記複数の事象フレームの各事象フレームのために、前記物体が前記経路沿いに位置するという十分な証拠があると判断するように選ぶプロセスと、
前記複数の事象フレームに対応する複数の取得時間を得るタイミングプロセスであって、前記複数の取得時間の各取得時間が、前記対応する事象フレームが取得された時間の機能であるプロセスと、
複数のロケーション値を算定する第一の分析プロセスであって、前記複数のロケーション値の各ロケーション値は、関係する事象フレーム内で前記経路沿いの前記物体の位置に応答するプロセスと、
前記複数のロケーション値と前記複数の取得時間を使い前記記録時間を決定する第二の分析プロセスと、
遅延間隔により前記記録時間に続くレポートタイムで信号を生成する出力プロセスと、
を備える、システム。
【請求項38】
前記複数の取得時間の各取得時間は、前記対応する事象フレームが取得された時間を得るエンコーダカウントである、請求項37に記載のシステム。
【請求項39】
前記第二の分析プロセスは、曲線を前記複数のロケーション値と前記複数の取得時間に適合させるステップを含む、請求項37に記載のシステム。
【請求項40】
前記曲線は放物線である、請求項39に記載のシステム。
【請求項41】
前記曲線は頂点を有し、
前記第二の分析プロセスは、前記曲線の前記頂点を決定するステップをさらに含む、請求項39に記載のシステム。
【請求項42】
前記事象はフロー事象を含み、前記フロー事象は前記記録点を通して前記物体の動作を含む、請求項37に記載のシステム。
【請求項43】
前記事象はストローク事象を含み、前記ストローク事象は、前記経路沿いの前進と後退の動作を含む、請求項37に記載のシステム。
【請求項44】
前記経路は頂点を有し、
前記記録点は前記経路の前記頂点である、請求項37に記載のシステム。
【請求項45】
前記取得プロセス、前記第一の分析プロセス、および前記第ニの分析プロセスは、少なくとも毎秒200フレームの割合で作動する、請求項37に記載のシステム。
【請求項46】
複数の事象タイプから事象タイプを選択する第二の選択プロセスであって、前記事象タイプは、前記経路に沿った前記物体の前記動作に対応するプロセスをさらに含み、
前記第二の分析プロセスは、前記事象タイプを使い前記記録時間を決定する、請求項37に記載のシステム。
【請求項47】
複数の事象の検出と報告のための方法であって、
前記複数の事象の各事象のために、前記事象が起こる時間の機能である対応する記録時間を決定するステップであって、前記対応する記録時間を決定するステップは、対応する決定遅延により前記対応する記録時間とは異なる対応する決定ポイントで起こり、前記複数の事象に対応する前記決定遅滞は可変であるステップと、
前記複数事象の各事象のために、遅滞間隔ごとに前記対応する記録時間に続く対応するレポートタイムに対応する信号を生成するステップと、
前記複数事象の各事象のために、前記対応する記録時間を示す前記対応する信号の前記対応するレポートタイムを使うステップと、
を備える方法。
【請求項48】
各記録時間は、前記対応する事象が起こる時間に比例する、請求項47に記載の方法。
【請求項49】
各記録時間は、前記対応する事象が起こる時間の機能であるエンコーダカウントである、請求項47に記載の方法。
【請求項50】
前記複数の事象の各事象はフロー事象を含み、前記フロー事象は記録点を通る物体の動作を含み、前記対応する記録時間は、前記物体が前記記録点を通過する時間に応答する、請求項47に記載の方法。
【請求項51】
前記複数の事象の各事象はストローク事象を含み、前記ストローク事象は、頂点へ前進、また頂点から後退する物体の動作を含み、前記対応する記録時間は、前記物体が前記頂点に達する時間に応答する、請求項47に記載の方法。
【請求項52】
複数の事象タイプから事象タイプを選択するステップをさらに含み、前記対応する記録時間を決定するステップは、前記事象タイプに応答する、請求項47に記載の方法。
【請求項53】
前記複数の事象タイプはフロー事象タイプとストローク事象タイプを含む、請求項5 2に記載の方法。
【請求項54】
前記事象タイプを選択するステップは、ヒューマン・マシン・インターフェイスに応答する、請求項52に記載の方法。
【請求項55】
前記遅滞間隔は、ヒューマン・マシン・インターフェイスに応答して選択される、請求項47に記載の方法。
【請求項56】
各対応するレポートタイムに各対応する信号を生成するために必要とされる情報を保持するために先入れ先出しバッファを使うステップをさらに含む、請求項47に記載の方法。
【請求項57】
複数の事象の検出と報告のためのシステムであって、
複数の事象の各事象のために、前記事象が起こる時間の機能である対応する記録時間を決定する分析プロセスであって、前記分析プロセスは、対応する決定遅滞による前記対応する記録時間とは異なる対応する決定ポイントで対応する記録時間を決定し、前記複数の事象に対応する前記決定遅滞は可変であるプロセスと、
前記複数の事象の各事象のために、遅滞間隔ごとに前記対応する記録時間に続く対応するレポートタイムに対応する信号を生成する出力プロセスと、
を含むシステム。
【請求項58】
各記録時間は、前記対応する事象が起こる時間に比例する、請求項57に記載のシステム。
【請求項59】
各記録時間は、前記対応する事象が起こる時間の機能であるエンコーダカウントである、請求項57に記載のシステム。
【請求項60】
前記複数の事象の各事象はフロー事象を含み、前記フロー事象は記録点を通る物体の動作を含み、前記対応する記録時間は、前記物体が前記記録点を通過する時間に応答する、請求項57に記載のシステム。
【請求項61】
前記複数の事象の各事象はストローク事象を含み、前記ストローク事象は、頂点へ前進、また頂点から後退する物体の動作を含み、前記対応する記録時間は、前記物体が前記頂点に達する時間に応答する、請求項57に記載のシステム。
【請求項62】
複数の事象タイプから事象タイプを選択する選択プロセスをさらに含み、前記分析プロセスは、前記事象タイプを使い、前記対応する記録時間を決定する、請求項57に記載のシステム。
【請求項63】
前記複数の事象タイプは、フロー事象とストローク事象を含む、請求項62に記載のシステム。
【請求項64】
前記事象タイプを選択するために使われるヒューマン・マシン・インターフェイスをさらに備える、請求項62に記載のシステム。
【請求項65】
前記遅延間隔を選択するために使われるヒューマン・マシン・インターフェイスをさらに備える、請求項57に記載のシステム。
【請求項66】
各対応するレポートタイムに各対応する信号を生成するために必要とされる情報を保持する先入れ先出しバッファをさらに含む、請求項57に記載のシステム。
【請求項1】
事象の自動視覚検出のための方法であって、
複数のフレームを取得するステップであって、前記複数のフレームの各フレームは前記事象が起こる二次元の視野の画像を含み、前記事象は所定の物体の画像を含むステップと、
前記複数のフレームの視覚分析に応答して、複数の事象検出加重を計算するステップであって、前記複数の事象検出加重の各事象検出加重は、それぞれ前記複数のフレームの各フレームに対応し、前記事象が前記視野において起こっている証拠を含むステップと、
前記複数のフレームから複数の事象フレームを選択するステップであって、前記複数の事象フレームは、前記複数の事象検出加重のサブセットに対応するステップと、
前記複数の事象検出加重の前記サブセットの事象分析に応答して、前記事象が起こったかどうかを決定するステップと、
を含む方法。
【請求項2】
事象の自動視覚検出のための方法であって、
複数のフレームを取得するステップであって、前記複数のフレームの各フレームは前記事象が起こる二次元の視野の画像を含み、前記事象は固定基準点を通過する動作を含むステップと、
前記複数のフレームの視覚分析に応答して、複数の事象検出加重を計算するステップであって、前記複数の事象検出加重の各事象検出加重は、それぞれ前記複数のフレームの各フレームに対応し、前記事象が前記視野において起こっている証拠を含むステップと、
前記複数のフレームから複数の事象フレームを選択するステップであって、前記複数の事象フレームは、前記複数の事象検出加重のサブセットに対応するステップと、
前記複数の事象検出加重の前記サブセットの事象分析に応答して、前記事象が起こったかどうかを決定するステップと、
を含む方法。
【請求項3】
事象の自動視覚検出のための方法であって、
複数のフレームを取得するステップであって、前記複数のフレームの各フレームは前記事象が起こる二次元の視野の画像を含み、前記事象は前進と後退の動作を含むステップと、
前記複数のフレームの視覚分析に応答して、複数の事象検出加重を計算するステップであって、前記複数の事象検出加重の各事象検出加重は、それぞれ前記複数のフレームの各フレームに対応し、前記事象が前記視野において起こっている証拠を含むステップと、
前記複数のフレームから複数の事象フレームを選択するステップであって、前記複数の事象フレームは、前記複数の事象検出加重のサブセットに対応するステップと、
前記複数の事象検出加重の前記サブセットの事象分析に応答して、前記事象が起こったかどうかを決定するステップと、
を含む方法。
【請求項4】
事象の自動視覚検出のための方法であって、
複数のフレームを取得するステップであって、前記複数のフレームの各フレームは前記事象が起こる二次元の視野の画像を含み、前記事象は前記視野を通過する不良製造物体を含むステップと、
前記複数のフレームの視覚分析に応答して、複数の事象検出加重を計算するステップであって、前記複数の事象検出加重の各事象検出加重は、それぞれ前記複数のフレームの各フレームに対応し、前記事象が前記視野において起こっている証拠を含むステップと、
前記複数のフレームから複数の事象フレームを選択するステップであって、前記複数の事象フレームは、前記複数の事象検出加重のサブセットに対応するステップと、
前記複数の事象検出加重の前記サブセットの事象分析に応答して、前記事象が起こったかどうかを決定するステップと、
を含む方法。
【請求項5】
事象の自動視覚検出のための方法であって、
複数のフレームを取得するステップであって、前記複数のフレームの各フレームは前記事象が起こる二次元の視野の画像を含み、前記事象は前記視野に物体の間違った動作を含むステップと、
前記複数のフレームの視覚分析に応答して、複数の事象検出加重を計算するステップであって、前記複数の事象検出加重の各事象検出加重は、それぞれ前記複数のフレームの各フレームに対応し、前記事象が前記視野において起こっている証拠を含むステップと、
前記複数のフレームから複数の事象フレームを選択するステップであって、前記複数の事象フレームは、前記複数の事象検出加重のサブセットに対応するステップと、
前記複数の事象検出加重の前記サブセットの事象分析に応答して、前記事象が起こったかどうかを決定するステップと、
を含む方法。
【請求項6】
事象の自動視覚検出のための方法であって、
複数のフレームを取得するステップであって、前記複数のフレームの各フレームは前記事象が起こる二次元の視野の画像を含み、前記事象は間違った位置にある物体を含むステップと、
前記複数のフレームの視覚分析に応答して、複数の事象検出加重を計算するステップであって、前記複数の事象検出加重の各事象検出加重は、それぞれ前記複数のフレームの各フレームに対応し、前記事象が前記視野において起こっている証拠を含むステップと、
前記複数のフレームから複数の事象フレームを選択するステップであって、前記複数の事象フレームは、前記複数の事象検出加重のサブセットに対応するステップと、
前記複数の事象検出加重の前記サブセットの事象分析に応答して、前記事象が起こったかどうかを決定するステップと、
を含む方法。
【請求項7】
事象の自動視覚検出のための方法であって、
複数のフレームを取得するステップであって、前記複数のフレームの各フレームは前記事象が起こる二次元の視野の画像を含むステップと、
前記複数のフレームの視覚分析に応答して、複数の事象検出加重を計算するステップであって、前記複数の事象検出加重の各事象検出加重は、それぞれ前記複数のフレームの各フレームに対応し、前記事象が前記視野において起こっている証拠を含むステップと、
前記複数のフレームから複数の事象フレームを選択するステップであって、前記複数の事象フレームは、前記複数の事象検出加重のサブセットに対応するステップと、
前記複数の事象検出加重の前記サブセットの事象分析に応答して、前記事象が起こったかどうかを決定するステップと、
前記事象が起こる時間に同期される信号を生成するステップと、
を含む方法。
【請求項8】
事象の自動視覚検出のための方法であって、
複数のフレームを取得するステップであって、前記複数のフレームの各フレームは前記事象が起こる二次元の視野の画像を含むステップと、
前記複数のフレームの視覚分析に応答して、複数の事象検出加重を計算するステップであって、前記複数の事象検出加重の各事象検出加重は、それぞれ前記複数のフレームの各フレームに対応し、前記事象が前記視野において起こっている証拠を含むステップと、
前記複数のフレームから複数の事象フレームを選択するステップであって、前記複数の事象フレームは、前記複数の事象検出加重のサブセットに対応するステップと、
前記複数の事象検出加重の前記サブセットの事象分析に応答して、前記事象が起こったかどうかを決定するステップと、
を含み、前記事象分析は、
対応する複数の論理結果を生成する複数の比較演算であって、前記複数の比較演算の各比較演算は、第一の値と第二の値の比較を含み、前記第一の値と前記第二の値のうちの少なくとも一つは、前記複数の事象検出加重の前記サブセットの数値統計に応答する比較演算と、
前記事象が起こったかどうかを決定するための前記複数の論理結果を組み合わせる少なくとも一つの論理演算と、
を含む方法。
【請求項9】
事象の自動視覚検出のための方法であって、
複数のフレームを取得するステップであって、前記複数のフレームの各フレームは前記事象が起こる二次元の視野の画像を含むステップと、
前記複数のフレームの視覚分析に応答して、複数の事象検出加重を計算するステップであって、前記複数の事象検出加重の各事象検出加重は、それぞれ前記複数のフレームの各フレームに対応し、前記事象が前記視野において起こっている証拠を含むステップと、
前記複数のフレームから複数の事象フレームを選択するステップであって、前記複数の事象フレームは、前記複数の事象検出加重のサブセットに対応するステップと、
前記複数の事象検出加重の前記サブセットの事象分析に応答して、前記事象が起こったかどうかを決定するステップであって、前記事象分析は、実質的に従来のプログラミング言語の構文に似ている構文の表現を示すテキスト文字列を含むステップと、
を含む方法。
【請求項10】
事象の自動視覚検出のための方法であって、
複数のフレームを取得するステップであって、前記複数のフレームの各フレームは前記事象が起こる二次元の視野の画像を含むステップと、
前記複数のフレームの視覚分析に応答して、複数の事象検出加重を計算するステップであって、前記複数の事象検出加重の各事象検出加重は、それぞれ前記複数のフレームの各フレームに対応し、前記事象が前記視野において起こっている証拠を含むステップと、
前記複数のフレームから複数の事象フレームを選択するステップであって、前記複数の事象フレームは、前記複数の事象検出加重のサブセットに対応するステップと、
前記複数の事象検出加重の前記サブセットの事象分析に応答して、前記事象が起こったかどうかを決定するステップと、
を含み、前記方法の前記ステップは、少なくとも毎秒200フレームの割合で実行される方法。
【請求項11】
事象の自動視覚検出のための方法であって、
複数のフレームを取得するステップであって、前記複数のフレームの各フレームは前記事象が起こる二次元の視野の画像を含むステップと、
前記複数のフレームの視覚分析に応答して、複数の事象検出加重を計算するステップであって、前記複数の事象検出加重の各事象検出加重は、それぞれ前記複数のフレームの各フレームに対応し、前記事象が前記視野において起こっている証拠を含み、前記視覚分析は、前記複数のフレームの各フレームに対し、視野の関心領域の位置を調整するための探知器を使用するステップと、
前記関心領域を分析するステップと、
を含むステップと、
前記複数のフレームから複数の事象フレームを選択するステップであって、前記複数の事象フレームは、前記複数の事象検出加重のサブセットに対応するステップと、
前記複数の事象検出加重の前記サブセットの事象分析に応答して、前記事象が起こったかどうかを決定するステップと、
を含む方法。
【請求項12】
事象の自動視覚検出のための方法であって、
複数のフレームを取得するステップであって、前記複数のフレームの各フレームは前記事象が起こる二次元の視野の画像を含むステップと、
前記複数のフレームの視覚分析に応答して、複数の事象検出加重を計算するステップであって、前記複数の事象検出加重の各事象検出加重は、それぞれ前記複数のフレームの各フレームに対応し、前記事象が前記視野において起こっている証拠を含むステップと、
複数の事象検出加重の活動分析に応答して、前記複数のフレームから複数の事象フレームを選択するステップであって、前記複数の事象フレームは、前記複数の事象検出加重のサブセットに対応するステップと、
を含み、前記活動分析は、
前記視覚分析が前記事象が起こっているという十分な証拠を示す事象検出加重を算定した場合、有効状態に入るステップと、
前記視覚分析が前記事象が起こっているという不十分な証拠をそれぞれ示す複数の事象検出加重を算定した場合、有効状態を終了するステップと、
前記複数の事象検出加重の前記サブセットの事象分析に応答し、前記事象が起こっているかどうかを決定するステップと、
を含む方法。
【請求項13】
事象の自動視覚検出のための方法であって、
前記事象を特定するためにヒューマン・マシン・インターフェイスを使うステップであって、前記ヒューマン・マシン・インターフェイスは論理目的を備えるステップと、
複数のフレームを取得するステップであって、前記複数のフレームの各フレームは前記事象が起こる二次元の視野の画像を含むステップと、
前記複数のフレームの視覚分析に応答して、複数の事象検出加重を計算するステップであって、前記複数の事象検出加重の各事象検出加重は、それぞれ前記複数のフレームの各フレームに対応し、前記事象が前記視野において起こっている証拠を含むステップと、
前記複数のフレームから複数の事象フレームを選択するステップであって、前記複数の事象フレームは、前記複数の事象検出加重のサブセットに対応するステップと、
前記複数の事象検出加重の前記サブセットの事象分析に応答して、前記事象が起こったかどうかを決定するステップと、
を含む方法。
【請求項14】
事象の自動視覚検出のためのシステムであって、
複数のフレームを取得する取得プロセスであって、前記複数のフレームの各フレームは、前記事象が起こる二次元の視野の画像を含み、前記事象は所定の物体の動作を含むプロセスと、
前記複数のフレームに応答して、複数の事象検出加重を算定する視覚分析プロセスであって、前記複数の事象検出加重の各事象検出加重は、前記複数のフレームの各フレームに対応し、前記事象が前記視野で起こっている証拠を含むプロセスと、
前記複数のフレームから複数の事象フレームを選択する選択プロセスであって、前記複数の事象フレームは前記複数の事象検出加重のサブセットに対応するプロセスと、
前記複数の事象検出加重の前記サブセットに応答して、前記事象が起こっているかどうかを決定する事象分析プロセスと、
を備えるシステム。
【請求項15】
事象の自動視覚検出のためのシステムであって、
複数のフレームを取得する取得プロセスであって、前記複数のフレームの各フレームは、前記事象が起こる二次元の視野の画像を含み、前記事象は固定基準点を通過する動作を含むプロセスと、
前記複数のフレームに応答して、複数の事象検出加重を算定する視覚分析プロセスであって、前記複数の事象検出加重の各事象検出加重は、前記複数のフレームの各フレームに対応し、前記事象が前記視野で起こっている証拠を含むプロセスと、
前記複数のフレームから複数の事象フレームを選択する選択プロセスであって、前記複数の事象フレームは前記複数の事象検出加重のサブセットに対応するプロセスと、
前記複数の事象検出加重の前記サブセットに応答して、前記事象が起こったかどうかを決定する事象分析プロセスと、
を備えるシステム。
【請求項16】
事象の自動視覚検出のためのシステムであって、
複数のフレームを取得する取得プロセスであって、前記複数のフレームの各フレームは、前記事象が起こる二次元の視野の画像を含み、前記事象は前進と後退を含むプロセスと、
前記複数のフレームに応答して、複数の事象検出加重を算定する視覚分析プロセスであって、前記複数の事象検出加重の各事象検出加重は、前記複数のフレームの各フレームにそれぞれ対応し、前記事象が前記視野で起こっている証拠を含むプロセスと、
前記複数のフレームから複数の事象フレームを選択する選択プロセスであって、前記複数の事象フレームは前記複数の事象検出加重のサブセットに対応するプロセスと、
前記複数の事象検出加重の前記サブセットに応答して、前記事象が起こったかどうかを決定する事象分析プロセスと、
を備えるシステム。
【請求項17】
事象の自動視覚検出のためのシステムであって、
複数のフレームを取得する取得プロセスであって、前記複数のフレームの各フレームは、前記事象が起こる二次元の視野の画像を含み、前記事象は前記視野を通過する不良製造物体含むプロセスと、
前記複数のフレームに応答して、複数の事象検出加重を算定する視覚分析プロセスであって、前記複数の事象検出加重の各事象検出加重は、前記複数のフレームの各フレームにそれぞれ対応し、前記事象が前記視野で起こっている証拠を含むプロセスと、
前記複数のフレームから複数の事象フレームを選択する選択プロセスであって、前記複数の事象フレームは前記複数の事象検出加重のサブセットに対応するプロセスと、
前記複数の事象検出加重の前記サブセットに応答して、前記事象が起こったかどうかを決定する事象分析プロセスと、
を備えるシステム。
【請求項18】
事象の自動視覚検出のためのシステムであって、
複数のフレームを取得する取得プロセスであって、前記複数のフレームの各レームは、前記事象が起こる二次元の視野の画像を含み、前記事象は前記視野に物体の間違った動作を含むプロセスと、
前記複数のフレームに応答して、複数の事象検出加重を算定する視覚分析プロセスであって、前記複数の事象検出加重の各事象検出加重は、前記複数のフレームの各フレームにそれぞれ対応し、前記事象が前記視野で起こっている証拠を含むプロセスと、
前記複数のフレームから複数の事象フレームを選択する選択プロセスであって、前記複数の事象フレームは前記複数の事象検出加重のサブセットに対応するプロセスと、
前記複数の事象検出加重の前記サブセットに応答して、前記事象が起こったかどうかを決定する事象分析プロセスと、
を備えるシステム。
【請求項19】
事象の自動視覚検出のためのシステムであって、
複数のフレームを取得する取得プロセスであって、前記複数のフレームの各フレームは、前記事象が起こる二次元の視野の画像を含み、前記事象は間違った位置にある物体を含むプロセスと、
前記複数のフレームに応答して、複数の事象検出加重を算定する視覚分析プロセスであって、前記複数の事象検出加重の各事象検出加重は、前記複数のフレームの各フレームにそれぞれ対応し、前記事象が前記視野で起こっている証拠を含むプロセスと、
前記複数のフレームから複数の事象フレームを選択する選択プロセスであって、前記複数の事象フレームは前記複数の事象検出加重のサブセットに対応するプロセスと、
前記複数の事象検出加重の前記サブセットに応答して、前記事象が起こったかどうかを決定する事象分析プロセスと、
を備えるシステム。
【請求項20】
事象の自動視覚検出のためのシステムであって、
複数のフレームを取得する取得プロセスであって、前記複数のフレームの各フレームは、前記事象が起こる二次元の視野の画像を含むプロセスと、
前記複数のフレームに応答して、複数の事象検出加重を算定する視覚分析プロセスであって、前記複数の事象検出加重の各事象検出加重は、前記複数のフレームの各フレームにそれぞれ対応し、前記事象が前記視野で起こっている証拠を含むプロセスと、
前記複数のフレームから複数の事象フレームを選択する選択プロセスであって、前記複数の事象フレームは前記複数の事象検出加重のサブセットに対応するプロセスと、
前記複数の事象検出加重の前記サブセットに応答して、前記事象が起こったかどうかを決定する事象分析プロセスと、
を備えるシステム。
【請求項21】
事象の自動視覚検出のためのシステムであって、
複数のフレームを取得する取得プロセスであって、前記複数のフレームの各フレームは、前記事象が起こる二次元の視野の画像を含むプロセスと、
前記複数のフレームに応答して、複数の事象検出加重を算定する視覚分析プロセスであって、前記複数の事象検出加重の各事象検出加重は、前記複数のフレームの各フレームにそれぞれ対応し、前記事象が前記視野で起こっている証拠を含むプロセスと、
前記複数のフレームから複数の事象フレームを選択する選択プロセスであって、前記複数の事象フレームは前記複数の事象検出加重のサブセットに対応するプロセスと、
前記複数の事象検出加重の前記サブセットに応答して、前記事象が起こったかどうかを決定する事象分析プロセスであって、対応する複数の論理結果を生成する複数の比較演算を含み、前記複数の比較演算の各比較演算は、第一の値と第二の値の比較を含み、前記第一の値と前記第二の値のうちの少なくとも一つは、前記複数の事象検出加重の前記サブセットの数値統計に応答するプロセスと、
前記事象が起こったかどうかを決定するための前記複数の論理結果を組み合わせる少なくとも一つの論理演算と、
を備えるシステム。
【請求項22】
事象の自動視覚検出のためのシステムであって、
複数のフレームを取得する取得プロセスであって、前記複数のフレームの各フレームは、前記事象が起こる二次元の視野の画像を含むプロセスと、
前記複数のフレームに応答して、複数の事象検出加重を算定する視覚分析プロセスであって、前記複数の事象検出加重の各事象検出加重は、前記複数のフレームの各フレームにそれぞれ対応し、前記事象が前記視野で起こっている証拠を含むプロセスと、
前記複数のフレームから複数の事象フレームを選択する選択プロセスであって、前記複数の事象フレームは前記複数の事象検出加重のサブセットに対応するプロセスと、
前記複数の事象検出加重の前記サブセットに応答して、前記事象が起こったかどうかを決定する事象分析プロセスであって、事象分析プロセスは、実質的に従来のプログラミング言語の構文に似ている構文の表現を示すテキスト文字列を含むプロセスと、
を備えるシステム。
【請求項23】
事象の自動視覚検出のためのシステムであって、
複数のフレームを取得する取得プロセスであって、前記複数のフレームの各フレームは、前記事象が起こる二次元の視野の画像を含むプロセスと、
前記複数のフレームに応答して、複数の事象検出加重を算定する視覚分析プロセスであって、前記複数の事象検出加重の各事象検出加重は、前記複数のフレームの各フレームにそれぞれ対応し、前記事象が前記視野で起こっている証拠を含むプロセスと、
前記複数のフレームから複数の事象フレームを選択する選択プロセスであって、前記複数の事象フレームは前記複数の事象検出加重のサブセットに対応するプロセスと、
前記複数の事象検出加重の前記サブセットに応答して、前記事象が起こったかどうかを決定する事象分析プロセスと、
を含み、前記取得プロセス、前記視覚分析プロセス、前記選択プロセス、および前記事象分析プロセスは、少なくとも毎秒200フレームの割合で実行する、システム。
【請求項24】
事象の自動視覚検出のためのシステムであって、
複数のフレームを取得する取得プロセスであって、前記複数のフレームの各フレームは、前記事象が起こる二次元の視野の画像を含むプロセスと、
前記複数のフレームに応答して、複数の事象検出加重を算定する視覚分析プロセスであって、前記複数の事象検出加重の各事象検出加重は、前記複数のフレームの各フレームにそれぞれ対応し、前記事象が前記視野で起こっている証拠を含み、前記視覚分析プロセスは、前記複数のフレームの各フレームに対し、前記視野の関心領域の位置を調整する探知器と、前記関心領域を分析する領域分析プロセスとを含むプロセスと、
前記複数のフレームから複数の事象フレームを選択する選択プロセスであって、前記複数の事象フレームは前記複数の事象検出加重のサブセットに対応するプロセスと、
前記複数の事象検出加重の前記サブセットに応答して、前記事象が起こったかどうかを決定する事象分析プロセスと、
を含む、システム。
【請求項25】
事象の自動視覚検出のためのシステムであって、
複数のフレームを取得する取得プロセスであって、前記複数のフレームの各フレームは、前記事象が起こる二次元の視野の画像を含むプロセスと、
前記複数のフレームに応答して、複数の事象検出加重を算定する視覚分析プロセスであって、前記複数の事象検出加重の各事象検出加重は、前記複数のフレームの各フレームにそれぞれ対応し、前記事象が前記視野で起こっている証拠を含むプロセスと、
前記複数の事象検出加重に応答して、前記複数のフレームから複数の事象フレームを選択する活動分析プロセスであって、前記複数の事象フレームは、前記複数の事象検出加重のサブセットに対応し、前記活動分析プロセスは、前記視覚分析プロセスが前記事象が起こっているという十分な証拠を示す事象検出加重を算定した場合入り、前記視覚分析プロセスが前記事象が起こっているというには不十分な証拠をそれぞれ示す複数の事象検出加重を算定した場合終了する有効状態を含むプロセスと、
前記複数の事象検出加重の前記サブセットに応答して、前記事象が起こったかどうかを決定する事象分析プロセスと、
を含む、システム。
【請求項26】
事象の自動視覚検出のためのシステムであって、
前記事象を特定するヒューマン・マシン・インターフェイスであって、前記ヒューマン・マシン・インターフェイスは論理目的を備えるインターフェイスと、
複数のフレームを取得する取得プロセスであって、前記複数のフレームの各フレームは、前記事象が起こる二次元の視野の画像を含むプロセスと、
前記複数のフレームに応答して、複数の事象検出加重を算定する視覚分析プロセスであって、前記複数の事象検出加重の各事象検出加重は、前記複数のフレームの各フレームにそれぞれ対応し、前記事象が前記視野で起こっている証拠を含むプロセスと、
前記複数のフレームから複数の事象フレームを選択する選択プロセスであって、前記複数の事象フレームは前記複数の事象検出加重のサブセットに対応するプロセスと、
前記複数の事象検出加重の前記サブセットに応答して、前記事象が起こったかどうかを決定する事象分析プロセスと、
を備えるシステム。
【請求項27】
事象の自動視覚検出および報告のためのシステムであって、
複数のフレームを取得するステップであって、前記複数のフレームの各フレームは、
前記事象が起こる二次元の視野の画像を含み、前記事象は、経路に沿った物体の動作を含み、前記経路は記録点を持ち、前記事象は前記物体が前記記録点ぶ位置している記録時間さらに含むステップと、
複数のフレームの第一の分析に応答して、前記第一の分析が、前記物体が前記複数の事象フレームの各フレームために、前記物体が前記経路に沿って位置しているという十分な証拠を示すように、前記複数のフレームから複数の事象フレームを選択するステップと、
前記複数の事象フレームに対応する複数の取得時間を得るステップであって、前記複数の取得時間の各取得時間は、対応する事象フレームが取得された時間の機能であるステップと、
前記複数の事象フレームの第二の分析に応答して、複数のロケーション値を算定するステップであって、前記複数のロケーション値の各ロケーション値は、前記第二の分析により計算されるように、関連事象フレーム内で前記経路に沿って前記物体の位置に応答するステップと、
前記複数のロケーション値と前記複数の取得時間を使い、記録時間を決定するステップと、
遅延間隔により、記録時間に続くレポートタイム時に信号を生成するステップと、
を含む方法。
【請求項28】
前記複数の取得時間の各取得時間は、対応する事象フレームが取得された時に得られたエンコーダカウントである、請求項27に記載の方法。
【請求項29】
前記記録時間を決定するステップは、曲線を前記複数のロケーション値と前記複数の取得時間に適合させるステップを含む、請求項27に記載の方法。
【請求項30】
前記曲線は、放物線である、請求項29に記載の方法。
【請求項31】
前記曲線は頂点を有し、
前記記録時間を決定するステップは前記曲線の前記頂点を決定するステップを含む、請求項29に記載の方法。
【請求項32】
前記事象はフロー事象を含み、前記フロー事象は、前記記録点を通して前記物体の動作を含む、請求項27に記載の方法。
【請求項33】
前記事象はストローク事象を備え、前記ストローク事象は、前記経路沿いの前進と後退の動作を含む、請求項27に記載の方法。
【請求項34】
前記経路は頂点を持ち、前記記録点は、前記経路の頂点である、請求項27に記載の方法。
【請求項35】
前記複数のフレームは取得され、前記第一の分析と前記第二の分析は少なくとも毎秒200フレームの割合で実行される、請求項27に記載の方法。
【請求項36】
複数の事象タイプから事象タイプを選択するステップであって、前記事象タイプは、前記経路に沿った前記物体の前記動作に対応するステップをさらに含み、
前記記録時間を決定するステップは前記事象タイプに応答する、請求項27に記載の方法。
【請求項37】
事象の自動視覚検出および報告のためのシステムであって、
複数のフレームを取得する取得プロセスであって、前記複数のフレームの各フレームは、前記事象が起こる二次元の視野の画像を含み、前記事象は、経路沿いに物体の動作を含み、前記経路は記録点を持ち、前記事象は、前記物体が前記記録点に位置している記録時間をさらに含むプロセスと、
前記複数のフレームから複数の事象フレームを選ぶ第一の選択プロセスであって、前記第一の選択プロセスが、前記複数の事象フレームの各事象フレームのために、前記物体が前記経路沿いに位置するという十分な証拠があると判断するように選ぶプロセスと、
前記複数の事象フレームに対応する複数の取得時間を得るタイミングプロセスであって、前記複数の取得時間の各取得時間が、前記対応する事象フレームが取得された時間の機能であるプロセスと、
複数のロケーション値を算定する第一の分析プロセスであって、前記複数のロケーション値の各ロケーション値は、関係する事象フレーム内で前記経路沿いの前記物体の位置に応答するプロセスと、
前記複数のロケーション値と前記複数の取得時間を使い前記記録時間を決定する第二の分析プロセスと、
遅延間隔により前記記録時間に続くレポートタイムで信号を生成する出力プロセスと、
を備える、システム。
【請求項38】
前記複数の取得時間の各取得時間は、前記対応する事象フレームが取得された時間を得るエンコーダカウントである、請求項37に記載のシステム。
【請求項39】
前記第二の分析プロセスは、曲線を前記複数のロケーション値と前記複数の取得時間に適合させるステップを含む、請求項37に記載のシステム。
【請求項40】
前記曲線は放物線である、請求項39に記載のシステム。
【請求項41】
前記曲線は頂点を有し、
前記第二の分析プロセスは、前記曲線の前記頂点を決定するステップをさらに含む、請求項39に記載のシステム。
【請求項42】
前記事象はフロー事象を含み、前記フロー事象は前記記録点を通して前記物体の動作を含む、請求項37に記載のシステム。
【請求項43】
前記事象はストローク事象を含み、前記ストローク事象は、前記経路沿いの前進と後退の動作を含む、請求項37に記載のシステム。
【請求項44】
前記経路は頂点を有し、
前記記録点は前記経路の前記頂点である、請求項37に記載のシステム。
【請求項45】
前記取得プロセス、前記第一の分析プロセス、および前記第ニの分析プロセスは、少なくとも毎秒200フレームの割合で作動する、請求項37に記載のシステム。
【請求項46】
複数の事象タイプから事象タイプを選択する第二の選択プロセスであって、前記事象タイプは、前記経路に沿った前記物体の前記動作に対応するプロセスをさらに含み、
前記第二の分析プロセスは、前記事象タイプを使い前記記録時間を決定する、請求項37に記載のシステム。
【請求項47】
複数の事象の検出と報告のための方法であって、
前記複数の事象の各事象のために、前記事象が起こる時間の機能である対応する記録時間を決定するステップであって、前記対応する記録時間を決定するステップは、対応する決定遅延により前記対応する記録時間とは異なる対応する決定ポイントで起こり、前記複数の事象に対応する前記決定遅滞は可変であるステップと、
前記複数事象の各事象のために、遅滞間隔ごとに前記対応する記録時間に続く対応するレポートタイムに対応する信号を生成するステップと、
前記複数事象の各事象のために、前記対応する記録時間を示す前記対応する信号の前記対応するレポートタイムを使うステップと、
を備える方法。
【請求項48】
各記録時間は、前記対応する事象が起こる時間に比例する、請求項47に記載の方法。
【請求項49】
各記録時間は、前記対応する事象が起こる時間の機能であるエンコーダカウントである、請求項47に記載の方法。
【請求項50】
前記複数の事象の各事象はフロー事象を含み、前記フロー事象は記録点を通る物体の動作を含み、前記対応する記録時間は、前記物体が前記記録点を通過する時間に応答する、請求項47に記載の方法。
【請求項51】
前記複数の事象の各事象はストローク事象を含み、前記ストローク事象は、頂点へ前進、また頂点から後退する物体の動作を含み、前記対応する記録時間は、前記物体が前記頂点に達する時間に応答する、請求項47に記載の方法。
【請求項52】
複数の事象タイプから事象タイプを選択するステップをさらに含み、前記対応する記録時間を決定するステップは、前記事象タイプに応答する、請求項47に記載の方法。
【請求項53】
前記複数の事象タイプはフロー事象タイプとストローク事象タイプを含む、請求項5 2に記載の方法。
【請求項54】
前記事象タイプを選択するステップは、ヒューマン・マシン・インターフェイスに応答する、請求項52に記載の方法。
【請求項55】
前記遅滞間隔は、ヒューマン・マシン・インターフェイスに応答して選択される、請求項47に記載の方法。
【請求項56】
各対応するレポートタイムに各対応する信号を生成するために必要とされる情報を保持するために先入れ先出しバッファを使うステップをさらに含む、請求項47に記載の方法。
【請求項57】
複数の事象の検出と報告のためのシステムであって、
複数の事象の各事象のために、前記事象が起こる時間の機能である対応する記録時間を決定する分析プロセスであって、前記分析プロセスは、対応する決定遅滞による前記対応する記録時間とは異なる対応する決定ポイントで対応する記録時間を決定し、前記複数の事象に対応する前記決定遅滞は可変であるプロセスと、
前記複数の事象の各事象のために、遅滞間隔ごとに前記対応する記録時間に続く対応するレポートタイムに対応する信号を生成する出力プロセスと、
を含むシステム。
【請求項58】
各記録時間は、前記対応する事象が起こる時間に比例する、請求項57に記載のシステム。
【請求項59】
各記録時間は、前記対応する事象が起こる時間の機能であるエンコーダカウントである、請求項57に記載のシステム。
【請求項60】
前記複数の事象の各事象はフロー事象を含み、前記フロー事象は記録点を通る物体の動作を含み、前記対応する記録時間は、前記物体が前記記録点を通過する時間に応答する、請求項57に記載のシステム。
【請求項61】
前記複数の事象の各事象はストローク事象を含み、前記ストローク事象は、頂点へ前進、また頂点から後退する物体の動作を含み、前記対応する記録時間は、前記物体が前記頂点に達する時間に応答する、請求項57に記載のシステム。
【請求項62】
複数の事象タイプから事象タイプを選択する選択プロセスをさらに含み、前記分析プロセスは、前記事象タイプを使い、前記対応する記録時間を決定する、請求項57に記載のシステム。
【請求項63】
前記複数の事象タイプは、フロー事象とストローク事象を含む、請求項62に記載のシステム。
【請求項64】
前記事象タイプを選択するために使われるヒューマン・マシン・インターフェイスをさらに備える、請求項62に記載のシステム。
【請求項65】
前記遅延間隔を選択するために使われるヒューマン・マシン・インターフェイスをさらに備える、請求項57に記載のシステム。
【請求項66】
各対応するレポートタイムに各対応する信号を生成するために必要とされる情報を保持する先入れ先出しバッファをさらに含む、請求項57に記載のシステム。
【図1】

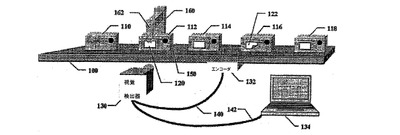
【図2】
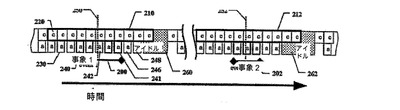
【図3】
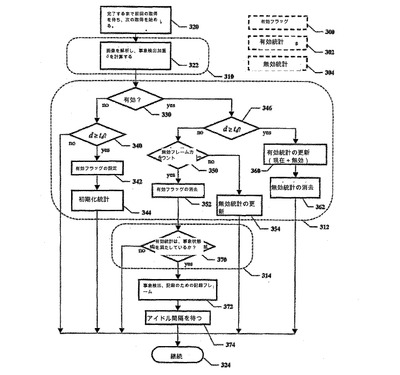
【図4】
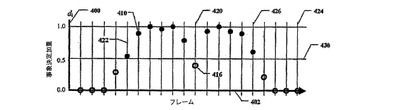
【図5】
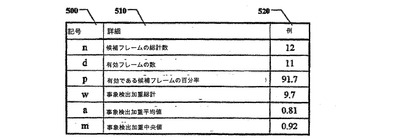
【図6】
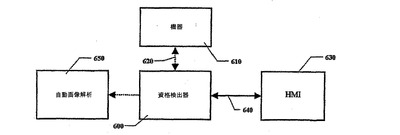
【図7】
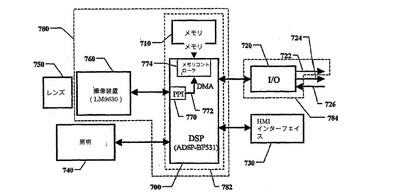
【図8】
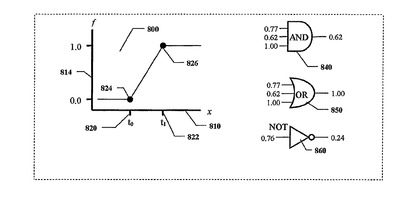
【図9】
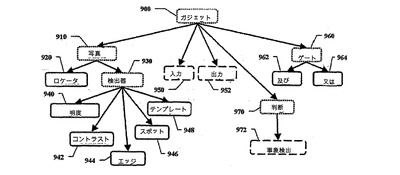
【図10】
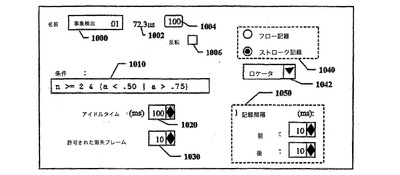
【図11】
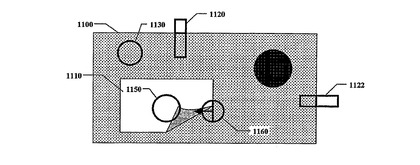
【図12】
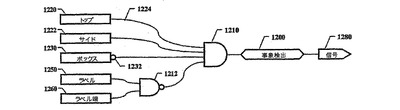
【図13】
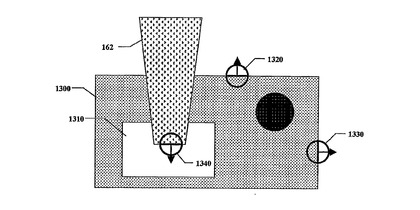
【図14】

【図15】
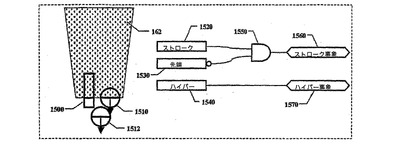
【図16】
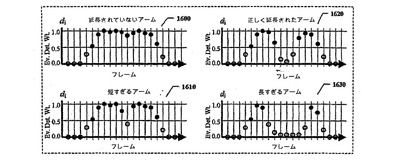
【図17】
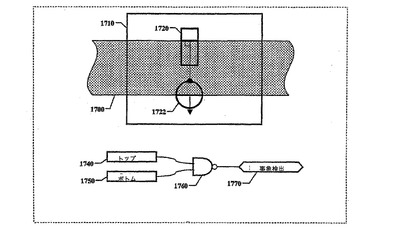
【図18】
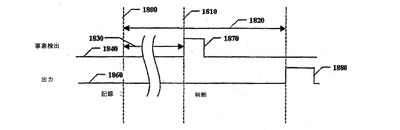
【図19】
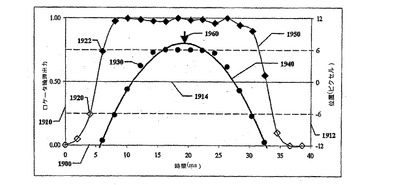
【図20】
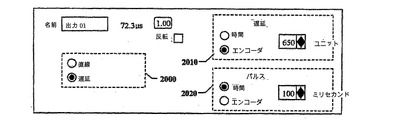
【図21】
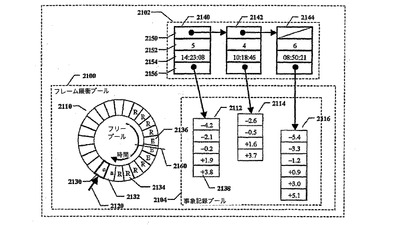
【図22】
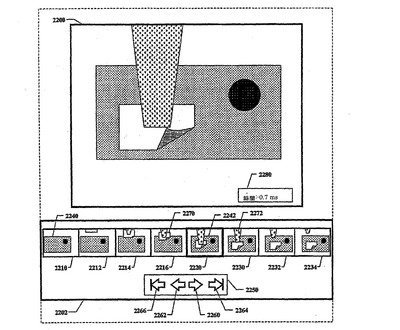
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【公開番号】特開2011−258220(P2011−258220A)
【公開日】平成23年12月22日(2011.12.22)
【国際特許分類】
【出願番号】特願2011−168412(P2011−168412)
【出願日】平成23年8月1日(2011.8.1)
【分割の表示】特願2007−527637(P2007−527637)の分割
【原出願日】平成17年6月6日(2005.6.6)
【出願人】(500576452)コグネックス・テクノロジー・アンド・インベストメント・コーポレーション (14)
【Fターム(参考)】
【公開日】平成23年12月22日(2011.12.22)
【国際特許分類】
【出願日】平成23年8月1日(2011.8.1)
【分割の表示】特願2007−527637(P2007−527637)の分割
【原出願日】平成17年6月6日(2005.6.6)
【出願人】(500576452)コグネックス・テクノロジー・アンド・インベストメント・コーポレーション (14)
【Fターム(参考)】
[ Back to top ]