
自動試験システム用の試薬およびサンプル処理装置
【課題】システムにおける試験に使用されるサンプルおよび試薬用の処理装置を提供する。
【解決手段】サンプルおよび試薬のキャリア40、42は、このようなキャリアの存在および適正な搭載を検出するプラットフォーム30に搭載される。キャリアは、識別のためにトランスポータ38によりプラットフォームからバーコードリーダ46に移される。試薬の容器は、読み取られる間は回転され、識別を促進する。トランスポータはさらに、識別された試薬キャリアをカルーセルに移動し、このカルーセルで、キャリアが自動的に固定されて格納され、試験における使用を待つ。カルーセルは回転し、選択された試薬の容器は、格納の間、回転するカルーセルで回転する。
【解決手段】サンプルおよび試薬のキャリア40、42は、このようなキャリアの存在および適正な搭載を検出するプラットフォーム30に搭載される。キャリアは、識別のためにトランスポータ38によりプラットフォームからバーコードリーダ46に移される。試薬の容器は、読み取られる間は回転され、識別を促進する。トランスポータはさらに、識別された試薬キャリアをカルーセルに移動し、このカルーセルで、キャリアが自動的に固定されて格納され、試験における使用を待つ。カルーセルは回転し、選択された試薬の容器は、格納の間、回転するカルーセルで回転する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、標本の試験に関し、詳細には、このような試験に使用される試薬などの流体を自動的に処理する装置に関する。
【背景技術】
【0002】
サンプルの生体学標本を試験することは、一般に、例えば、対象物のアイテムの存在を検査するためになされ、このアイテムは、DNA、RNAの特定の領域の全てまたは一部分、断片、補体、ペプチド、ポリペプチド、エンザイム、プリオン、プロテイン、メッセンジャーRNA、トランスファーRNA、ミトコンドリアRNAまたはDNA、抗体、抗原、アレルゲン、細胞、バイロン等などの生物学的エンティティの一部分、表面蛋白、上記のものと機能的同等物、その他であることができまたは含むことができる。患者の体液(例えば、血清、全血、尿、スワブ、血漿、大脳の髄液、リンパ液、固形組織)といった標本は、多数の各種試験を用いて分析され、患者の健康に関する情報を提供できる。
【0003】
このような試験では、標本は、外部環境からまたは標本間であるかどうかによらず、汚染物質が標本に導入されるのを防止する方法で処理されることが必須である。明らかに、1つの標本からのHIVウイルスが、不注意で異なる患者の標本を汚染する可能性がある場合、結果として生じる偽陽性試験結果は、患者への破滅的な精神的影響を有する可能性があり、さらに、後続の試験が後で誤りを見出さなければならない。さらに、このような試験は、極めて影響を受けやすいため、最小量の汚染物であっても、誤った試験結果をもたらすことがある。このような高度な試験では、試験で使用され得る種々の試薬が、同様に適正に処理され、汚染物質を回避するだけでなく、適量の正しい試薬が、適正な回数で使用されることを保証することが必須である。
【0004】
一般に、このような試験は、複数の標本および流体(典型的には、試薬)を処理する自動装置を使用して達成される。例えば、米国特許第6,588,625B2号および米国特許公開第2004/0005714A1号はそれぞれ、この種類の流体および標本を処理するシステムを開示している(これらの開示は、参照により本明細書に組み込まれる)。
【0005】
このような自動装置は、多くの場合、ピペットのセットを使用して、最初の容器(通常、上部が開いたチューブなどのレセプタクル)と標本が処理される容器との間で種々の流体を移動する。例えば、標本は、装置上のラックに装着されたチューブに収容されてもよく、ピペットを保持するヘッドは、プログラム化された運動を通してそのチューブ内にピペットを移動し、そこで真空が加えられて、チューブからピペットに選択された量の標本が抽出される。ヘッドは、その後チューブからピペットを後退させ、別のチューブまたは処理ステーションに置かれた反応容器上に移動し、ピペットから抽出された量の標本を反応容器に注入する。同様の処理を続行して、試薬供給源から適正な試薬(所望の試験に応じる)を得ることができる。
【0006】
このような自動装置の処理ステーションでは、標本は、それぞれ、試験の目的(例えばインキュベーション、調製、消散、溶出、分析、読取等)に従って処理される。例としては、標本は、分析のために、例えば標本からDNAまたはRNAを分離することによって調製され得る。標本が同様に、または代わりに分析されてもよい。通常、このような処理は、各チューブ内の標本に種々の流体(一般には試薬)を加えることを含む。例えば、第1のステップでは、試薬を、各チューブに加えて標本を洗浄してもよく、第2および3(およびそれ以上)の試薬を、他のプロセスを実行中の標本に加えて、例えば、対象とするDNAまたはRNAを解放および/または分離することにより、DNAまたはRNAが、後続の試験のために各チューブ内の標本から抽出されるようにしてよい。標本が、調製された標本の分析の一部として調製された後に、同一または異なる試薬が、チューブに加えられる同様のプロセスがまた実行されてもよい。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】米国特許第6,588,625号明細書
【特許文献2】米国特許出願公開第2004/0005714号明細書
【発明の概要】
【発明が解決しようとする課題】
【0008】
このような自動装置を用いる、試薬および他の流体の処理には問題が生じることがある。上述のヘッドおよびピペットを使用して、試薬を、レセプタクルから処理ステーション内の標本を含むチューブに自動的に移すことができるが、第一に必要なことは、装置上の適正なレセプタクルに適正な試薬を充填し、ヘッドおよびピペットが、プロセス中の適正な時間に適切な標本を含むチューブに適正な試薬を加えることを確実にすることである。
【0009】
従来、適正なレセプタクルに適正な試薬を充填することは、いくつかの異なる方法で達成されてきた。このような手順の1つにおいては、装置を制御する個人が、試薬を手動で計量してレセプタクルに加え、その後これらのレセプタクルを装置に配置する。別のこのような手順では、試薬の充填は、装置自体により自動的に達成され、装置は、ある輸送装置(先に述べたようなヘッドおよびピペットなど)を使用して、装置に設けられた試薬の大量供給源から試薬を移送する。しかし、上述の手順のいずれもが問題を生じる可能性がある。例えば、手動で試薬を加えることは、装置に不正確に試薬のレセプタクルを取り付けるといった、人的エラーを生じる可能性がある。さらに、試薬が正しい量で充填されたとしても、試薬が、装置上の誤った場所に注入され、この結果、ヘッドおよびピペットが、処理の特定のステップにおける使用に対して試薬を自動的に吸入するとき、それが全く誤った試薬である可能性があるか、またはヘッドおよびピペットが試薬を抽出するために移動する場所に、いずれの種類の試薬もが存在しない可能性がある。
【0010】
イリノイ州Abbott ParkのAbbott LaboratoriesのArchitect7 i2000システムは、オペレータが、長期間アナライザと相互作用することから解放され得る、自動操作を提供する高スループットアナライザである。この装置では、試薬の大量供給源は、冷却されたカルーセルに手動で搭載でき、その後アナライザは、試験手順が達成される処理ステーションのために、所望のサンプルおよび試薬を自動的に取得する。試薬およびサンプル用の容器は、システム上の自動トラッキングのためにバーコードが付けられる。各試薬の容器は、多くの試験に対して十分な試薬を収容することができ、その結果、最も一般的に実行される使用法および試験の種類に応じて、いくつかの試薬容器は、長期間カルーセル上に保持されることができる。特に、懸濁微粒子で生成される試薬では、一貫した使用量および投与量は、時間経過に伴って微粒子の沈殿のために悪影響を受ける可能性がある。
【0011】
本発明は、上述などの先行技術の試験システムの試薬およびサンプル処理装置に関する改良を目的としている。
【課題を解決するための手段】
【0012】
本発明の1つの態様では、システム内での試験に使用されるサンプルおよび試薬の処理装置が提供され、この装置は、試薬容器用の少なくとも1つのキャリアと、サンプル容器用の少なくとも1つのキャリアと、容器が試験システム内への搭載のために搭載側から配置され得る複数の場所を画定するプラットフォームとを含む。各場所における位置インジケータは、第1の位置に対して上方向に偏っており、プラットフォームと協働し、これにより位置インジケータは、プラットフォームの関連する位置上にキャリアにより係合され、(a)任意のキャリアが関連する場所において部分的にのみ搭載されるときに、位置インジケータは、第2の位置にあり、(b)サンプルキャリアが関連する場所において適正に搭載されるときに、位置インジケータは、第3の位置にあり、(c)試薬キャリアが関連する場所において適正に搭載されるときに、位置インジケータは、第4の位置にある。センサは、位置インジケータの位置を検出する。
【0013】
本発明のこの態様の1つの形態では、センサは、第1および第2の近接センサからなり、位置インジケータは、第1および第2の近接センサにそれぞれ位置合わせされた第1および第2のイヤー(ear)を含む。第1の位置では、イヤーは、近接センサから離れており、第2の位置では、第1のイヤーは、第1の近接センサの近位にあり、第2のイヤーは、第2の近接センサから離れており、第3の位置では、第1のイヤーは、第1の近接センサの近位にあり、第2のイヤーは、第2の近接センサの近位にあり、第4の位置では、第1のイヤーは、第1の近接センサから離れており、第2のイヤーは、第2の近接センサに近位にある。別の1つの形態では、位置インジケータは、一端をプラットフォームの下に回転可能に固定され、イヤーは、位置インジケータの他方の端部に配置されている。さらに別の形態では、近接センサは、エレクトリックアイであり、イヤーは、エレクトリックアイが遮蔽されると、エレクトリックアイに近接しているとして検出される。
【0014】
本発明のこの態様の別の形態では、プラットフォームは、プラットフォームの各キャリア場所に貫通開口を含み、位置インジケータは、突出部を含み、突出部は、開口を貫通して突き出し、かつ部分的に搭載される位置または適正に搭載される位置のいずれかにおいても、サンプルキャリアまたは試薬キャリアにより選択的に係合されるように構成される。
【0015】
別の形態では、各場所におけるプラットフォームは、注入側に平坦部分および隆起した端部を含み、突出部は、第1および第2のナックル(knuckle)を含む。第1のナックルは、位置インジケータが第1の位置にあるときに、プラットフォームの隆起した端部の上方で第1の距離突出し、第2のナックルは、位置インジケータが第1の位置にあるときに、プラットフォームの平坦部分の上方で第2の距離突出する。部分的に搭載されるキャリアは、隆起した端部上に載り、第1のナックルを係合して、位置インジケータを第2の位置に対して第1の距離だけ強制的に下方に下げ、サンプルおよび試薬キャリアの一方は、プラットフォームに適正に搭載されると、第2のナックルを係合し、位置インジケータを第3および第4の位置の一方に対して強制的に第2の距離だけ下方に下げる。
【0016】
さらに別の形態では、プラットフォームの場所は、プラットフォームの平坦部分の両側に沿った隆起した棚部を含み、この隆起した棚部は、適正に搭載されると、平坦部分の上方に他方のサンプルおよび試薬キャリアを支持するように構成される。第3のナックルは、位置インジケータが第1の位置にあるときに、棚部の上方で第3の距離だけ突き出し、これにより、他方のサンプルおよび試薬キャリアは、プラットフォームに適正に搭載されると、第3のナックルを係合し、位置インジケータを他方の第3および第4の位置に対して第3の距離だけ下方に強制的に下げる。
【0017】
さらに別の形態では、第3の距離は、第2の距離より大きく、第2の距離は、第1の距離より大きい。
【0018】
さらに別の形態では、センサは、第1および第2の近接センサを備え、位置インジケータは、(a)第1の位置で、近接センサから離れ、(b)第2の位置で、第1の近接センサの近位にあり、かつ第2の近接センサから離れ、(c)第3の位置で、第1および第2の近接センサの両方の近位にあり、(d)第4の位置で、第1の近接センサから離れ、かつ第2の近接センサに近位である。別の形態では、近接センサは、エレクトリックアイであり、イヤーは、エレクトリックアイが遮蔽されると、エレクトリックアイに近接しているとして検出される。
【0019】
本発明の別の態様では、搭載プラットフォームと作動格納カルーセルと間でキャリアを移動するように構成されたトランスポータを有する、生物学試験システムに利用可能なキャリアが提供される。キャリアは、試験システムにキャリアを搭載するために、搭載プラットフォームに受けられるように構成されたベース部材と、ベース部材を貫通するピボット軸の一端に回転可能に取り付けできる少なくとも1つのボトルシートとを含み、ボトルシートは、生物学試験に利用できる試薬の容器を確実に設置するように構成され、駆動部材は、ベース部材の下でピボット軸の他端に固定され、駆動部材およびボトルシートは、一緒に回転する。
【0020】
本発明のこの態様の1つの形態では、駆動部材はギヤである。
【0021】
本発明のさらに別の態様では、搭載プラットフォーム、キャリア、バーコードリーダ、およびトランスポータを含む、生物学試験システム用の供給機構体が提供される。キャリアは、試験システムにキャリアを搭載するために、搭載プラットフォームに受けられるように構成されたベース部材と、ベース部材を貫通するピボット軸の一端に回転可能に取り付けできる少なくとも1つのボトルシートとを有し、ボトルシートは、生物学試験に利用可能な試薬の容器を確実に設置するように構成され、駆動部材は、ベース部材の下でピボット軸の他端に固定され、駆動部材およびボトルシートは一緒に回転する。トランスポータは、搭載プラットフォームでキャリアを取り上げ、キャリアをバーコードリーダに移動して、1つのボトルシートに設置された試薬ボトルを識別するバーコードを読むように構成される。1つのボトルシートに設置される試薬のボトルが、バーコードリーダにより読み取られるボトルのバーコードの識別に対して適正な位置に存在する場合、バーコードリーダに隣接する駆動装置は、キャリア駆動部材を係合するように構成される。
【0022】
本発明のさらに別の態様では、軸を中心として回転可能に駆動できる格納カルーセルを含む、生物学試験システム用の供給機構体が提供され、カルーセルは、軸に対して全体に径方向に向けられる格納場所と、選択されるカルーセル格納場所に解放可能に固定できる複数のキャリアと、軸に実質的に中心合わせされるリングギヤとを有する。各キャリアは、試験システムにキャリアを搭載するために搭載プラットフォームに受けられるように構成されたベース部材と、ベース部材を貫通するピボット軸の一端に回転可能に取り付けできる少なくとも1つのボトルシートと、生物学試験に利用可能な試薬の容器を確実に設置するように構成された少なくとも1つのボトルシートと、ベース部材の下でピボット軸の他端に固定される駆動部材とを有し、駆動部材および少なくとも1つのボトルシートは一緒に回転する。リングギヤは、カルーセルに固定されるキャリアの駆動部材を係合し、これにより軸を中心とするカルーセルの回転が、キャリアのピボット軸を中心とするボトルシートを回転させて、設置された容器内の試薬を攪拌する。
【0023】
本発明のさらに別の態様では、生物学試験システムに対する供給機構体が提供され、軸を中心とする回転駆動可能な格納カルーセルを含み、カルーセルは、軸に対して全体に径方向に向けられた格納場所を有し、供給機構体はさらに、カルーセルの格納場所に解放可能に固定できる複数のキャリアと、移動ステーションに配置されたカルーセルの格納場所との間でキャリアを移送するように構成されたトランスポータと、各カルーセルの格納場所においてカルーセルにキャリアを接続するコネクタと、トランスポータが移動ステーションに近接すると、接続を解放するように構成された移動ステーションに近接する解放制御装置とを含む。
【0024】
本発明のこの態様の1つの形態では、コネクタは、各カルーセル格納場所に少なくとも1つのポケットを含み、このポケットは、搭載されたキャリア上のタブを受けて、キャリアを格納場所に固定し、接続部材を各カルーセルの格納場所に固定する。接続部材は、カルーセルの格納場所に置かれたキャリアを、タブがポケットに受けられる位置まで移動する第1の方向に向かって偏らされる。トランスポータが移動ステーションに近接すると、解放制御装置は、トランポータにより係合され、第1の方向とは反対の方向に接続部材を移動させることにより、ポケットからタブを解放する。別の形態では、解放制御装置は、トランスポータにより作動されるレバーであって、移動ステーションにおいて格納場所の接続部材を反対方向に係合して移動させる。さらに別の形態では、バネが、接続部材を第1の方向に偏らせる。
【0025】
本発明のこの態様の別の形態では、バーコードリーダおよび搭載プラットフォームが提供される。この形態では、各キャリアは、試験システムにキャリアを搭載するために、搭載プラットフォームに受けられるように構成されたベース部材と、ベース部材を貫通するピボット軸の一端に回転可能に取り付けできる少なくとも1つのボトルシートとを有し、ボトルシートは、生物学試験に利用可能な試薬の容器を確実に設置するように構成され、各キャリアはさらに、ベース部材の下でピボット軸の他端に固定される駆動部材とを有し、駆動部材およびボトルシートは、一緒に回転する。さらに、トランスポータは、搭載プラットフォームにおいてキャリアを取り上げ、キャリアをバーコードリーダに移動して、少なくとも1つのボトルシートに設置された試薬ボトルを識別するバーコードを読むように構成されている。この形態はさらに、カルーセルの軸に実質的に中心合わせされるリングギヤ、およびバーコードリーダに近接する駆動装置を含む。リングギヤは、カルーセルに固定されるキャリアの駆動部材を係合し、これにより軸を中心とするカルーセルの回転が、設置された容器内の試薬を攪拌するために、キャリアのピボット軸を中心としてボトルシートを回転させる。さらに、1つのボトルシートに設置される試薬のボトルが、バーコードリーダにより読み取られるボトルの識別バーコードに対して適正な位置に存在する場合、バーコードリーダに隣接する駆動装置は、キャリア駆動部材を係合するように構成される。
【図面の簡単な説明】
【0026】
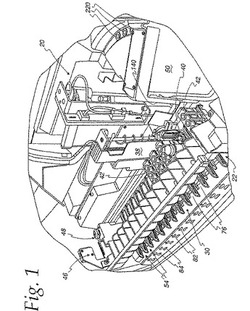
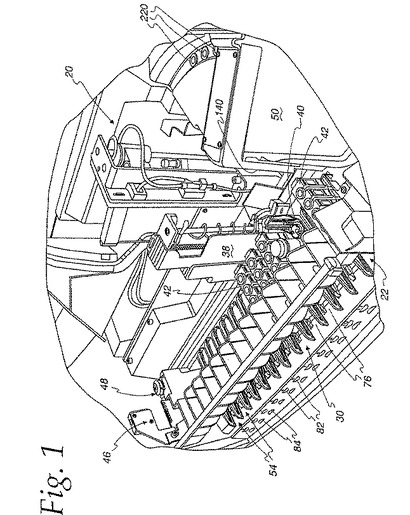
【図1】本発明の試薬およびサンプル処理装置を有する試験システムの一部の斜視図である。
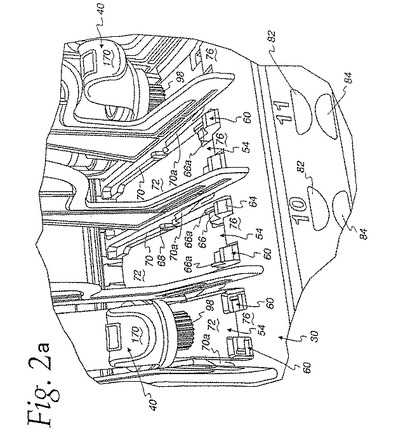
【図2a】本発明による搭載プラットフォームの一部の斜視図である。
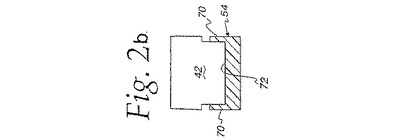
【図2b】搭載プラットフォーム上のサンプルキャリアの簡略図である。
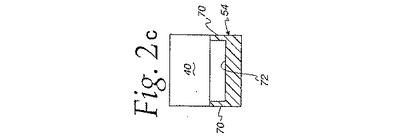
【図2c】搭載プラットフォーム上の試薬キャリアの簡略図である。
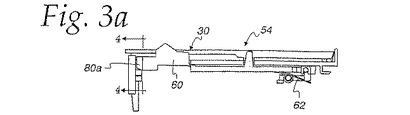
【図3a】搭載されるキャリアが存在しない搭載プラットフォーム場所の側面図である。
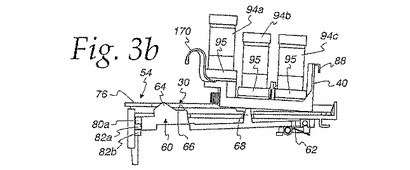
【図3b】試薬キャリアが完全に挿入されていない状態の、搭載プラットフォーム場所の側面図である。
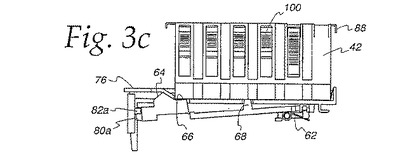
【図3c】サンプルキャリアが搭載されている状態の、搭載プラットフォーム場所の側面図である。
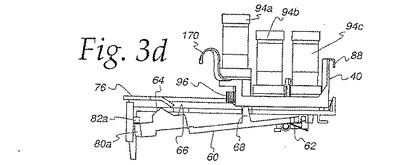
【図3d】試薬キャリアが搭載されている状態の、搭載プラットフォーム場所の側面図である。
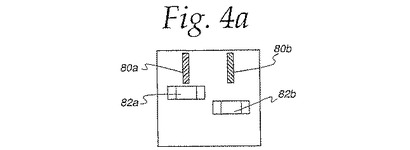
【図4a】位置インジケータの図3aの位置の検出を示す、図3aの線4−4に沿った断面図である。
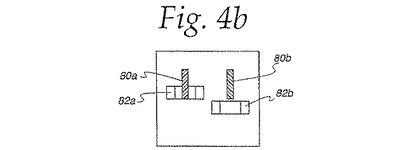
【図4b】図4aに類似するが、位置インジケータが図3bの位置にある状態の断面図である。
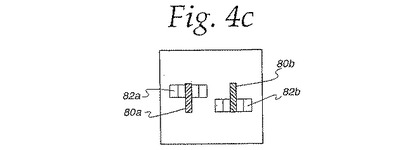
【図4c】図4aに類似するが、位置インジケータが図3cの位置にある状態の断面図である。
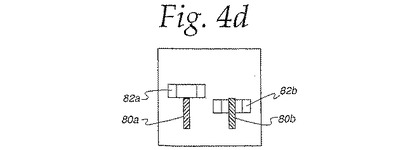
【図4d】図4aに類似するが、位置インジケータが図3dの位置にある状態の断面図である。
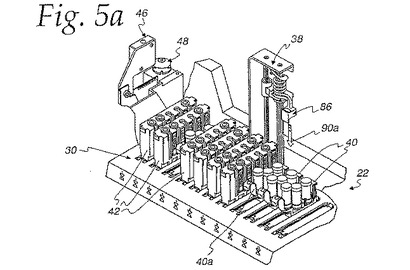
【図5a】本発明の処理装置の一部の連続動作を示しており、試薬キャリアは、バーコードリーダによる識別のためにトランスポータにより搭載プラットフォームから移動され、その後処理装置のカルーセルに向かってバーコードリーダから離れる。
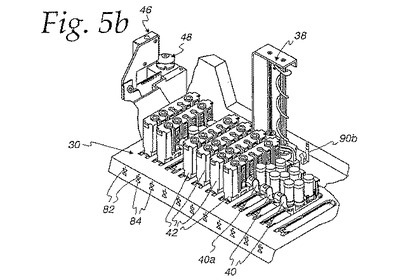
【図5b】本発明の処理装置の一部の連続動作を示しており、試薬キャリアは、バーコードリーダによる識別のためにトランスポータにより搭載プラットフォームから移動され、その後処理装置のカルーセルに向かってバーコードリーダから離れる。
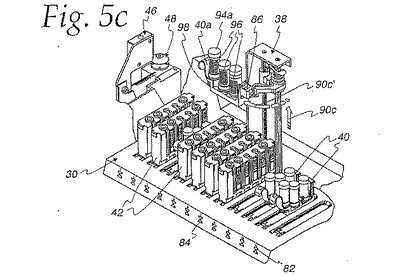
【図5c】本発明の処理装置の一部の連続動作を示しており、試薬キャリアは、バーコードリーダによる識別のためにトランスポータにより搭載プラットフォームから移動され、その後処理装置のカルーセルに向かってバーコードリーダから離れる。
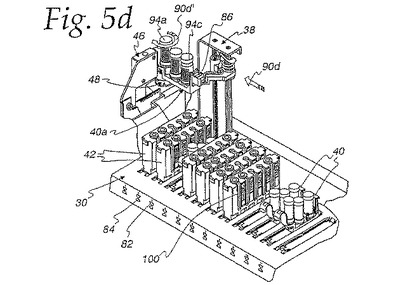
【図5d】本発明の処理装置の一部の連続動作を示しており、試薬キャリアは、バーコードリーダによる識別のためにトランスポータにより搭載プラットフォームから移動され、その後処理装置のカルーセルに向かってバーコードリーダから離れる。
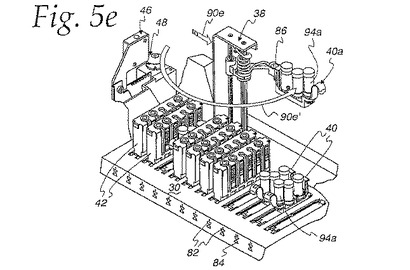
【図5e】本発明の処理装置の一部の連続動作を示しており、試薬キャリアは、バーコードリーダによる識別のためにトランスポータにより搭載プラットフォームから移動され、その後処理装置のカルーセルに向かってバーコードリーダから離れる。
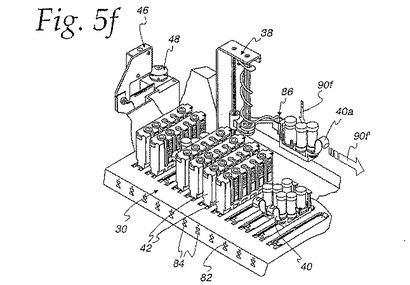
【図5f】本発明の処理装置の一部の連続動作を示しており、試薬キャリアは、バーコードリーダによる識別のためにトランスポータにより搭載プラットフォームから移動され、その後処理装置のカルーセルに向かってバーコードリーダから離れる。
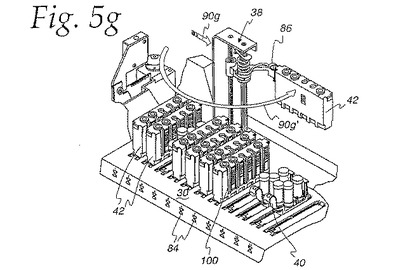
【図5g】図5eに類似し、本発明の処理装置の一部の連続動作を示しており、サンプルキャリアは、バーコードリーダから移動ステーションに移動している。
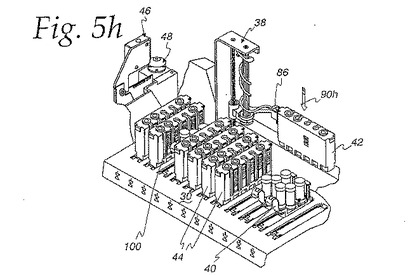
【図5h】図5fに類似し、本発明の処理装置の一部の連続動作を示しており、サンプルキャリアは、バーコードリーダから移動ステーションに移動している。
【図6】本発明の処理装置のカルーセル部分の分解組立図である。
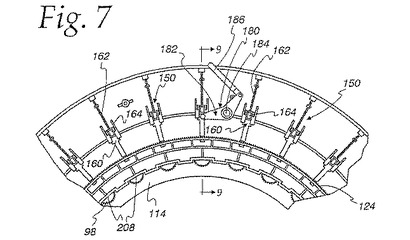
【図7】カルーセルの一部の底面図である。
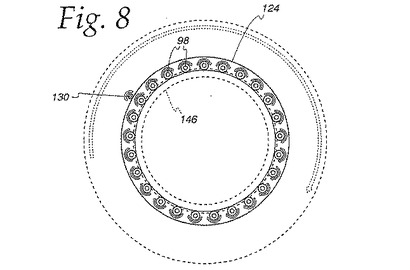
【図8】カルーセルの回転および試薬キャリアの駆動ギヤの関連した回転を示した概略図である。
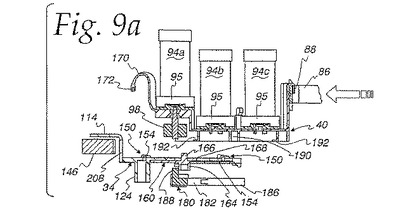
【図9a】カルーセル上への試薬キャリアの搭載を示した断面図である。
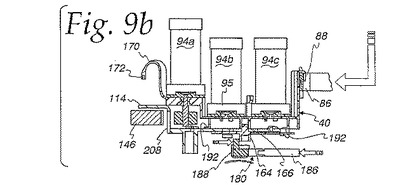
【図9b】カルーセル上への試薬キャリアの搭載を示した断面図である。
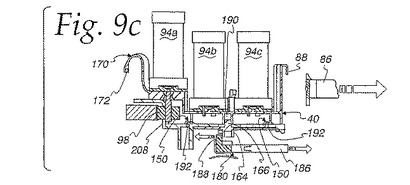
【図9c】カルーセル上への試薬キャリアの搭載を示した断面図である。
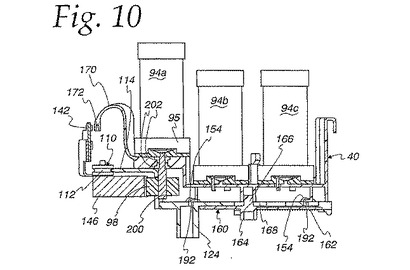
【図10】カルーセル上に固定された試薬キャリアの断面図である。
【発明を実施するための形態】
【0027】
サンプルの生物学試験に使用されることができるなどの試験システム20は、図1に部分的に示されており、特に、試験に使用されるサンプルおよび試薬を処理する処理装置22が示されている。本発明は特に、最も有利には最小のオペレータ介入を必要とする自動試験システムにおいて使用されることができる、処理装置22に関する。詳細には、本発明の処理装置22の様々な特徴は、サンプルおよび試薬の処理を容易にし、これにより、サンプルおよび試薬は、試験システム20内に簡単におよび確実に充填され、その後、所望の試験シーケンスに適正に入力されるように確実および自動的に処理することができる。
【0028】
本発明の処理装置22の様々な特徴は、搭載プラットフォーム30、試薬のカルーセル34、トランスポータまたは移送キャリア38、試薬キャリア40、およびサンプルキャリア42においてそれぞれ提供される。
【0029】
概略的には、オペレータは、サンプルキャリア42に固定された適切なボトルまたは容器にサンプルを充填し、かつ/または試薬キャリア40に固定された適切なボトルまたは容器に試薬を充填し、その後、搭載プラットフォーム30に搭載されるキャリア(40および/または42)を配置する(本明細書における説明は、キャリア40、42から分離され、キャリア40、42により移送される容器を示しているが、一体型キャリアである単一構成部品および容器は、有利に本発明の多くの態様の範囲内で使用できることは理解されるべきである。すなわち、容器自体が、本明細書で説明されるとおり、適正に処理されるように構成されている容器を提供することは、本発明の範囲内であり、容器およびキャリアの機能が、別個の構成部品により提供されることは必要とされない。)。
【0030】
以下に詳細に説明されるとおり、処理装置22は、搭載されるキャリア40、42の種類、およびキャリアが適切に搭載されているかどうかを認識する。適切に搭載されたキャリア40、42が検出されると、トランスポータ38により自動的に取り上げられ、容器および/またはキャリア40、42上のバーコードを読み取る適切なバーコードリーダ46に向かって移動され、このようなデータをシステム20の制御装置に入力する(例えばコンピュータ端末は、システム20を制御するためにオペレータ入力を許可し、当技術分野では知られている、所望の動作を実行することができる)。
【0031】
キャリアがサンプルキャリア42であるとき、トランスポータ38は、搭載プラットフォーム30にキャリアを戻すか、または試験システム20によるアクセスのためにキャリアを準備完了位置に置くことができる。
【0032】
キャリアが試薬キャリア40であるとき、バーコードリーダ46に近接するモータ駆動装置48が係合され、試薬容器の選択された1つを回転させて、バーコードリーダ46によりこのバーコードの読取を容易にする。次に、試薬キャリア40(したがって、その内容物がシステム20に対して識別されている)は、準備完了している格納場所にトランスポータ38により移送され、その中に配置されるカルーセル34上に取り付けられる。図1に示されているとおり、ハウジング50は、搭載プラットフォーム30の一端(バーコードリーダ46とは反対側の端部)に近接して配置され、カルーセル34(図1には示されない)は、ハウジング内に封入される。試薬は、長期間カルーセル34に格納され、このような試薬を要求する試験がオペレータにより必要とされるときに、使用されるために待機することができる。さらに、各試薬の容器は、複数の試験(例えば50回または100回の試験)を実行するために十分な試薬を含み、その結果試薬の容器は、この数の試験により使い果たされるまで、ハウジング50内に維持されることができる。このような格納要件の理由で、ハウジング50の内部は、このような時間の間種々の試薬を適切に格納するために、冷却される区画を確定するように適切に冷却されることができる。
【0033】
試験システム20による試験は、特定の要求されるサンプルおよび試薬を取り上げる任意の適切な手段により(例えば、容器からサンプルおよび試薬を吸引するピペッタまたは他の吸引システムにより)達成されることができ、その後、サンプルおよび試薬を試験領域に移し、その領域で、サンプルおよび試薬は、例えば、所望される特定の試験に対して必要に応じて処理される適切な反応容器に追加される。任意のこのような試験システム20は、有利に本発明において使用されてもよく、このようなシステム20の詳細は、本発明の一部を形成しない。
【0034】
次に、本発明の特定の構成部品を参照する。
【0035】
搭載プラットフォーム30は、図1に示され、図2aから図5hにそれぞれさらに詳細に示されている。搭載プラットフォーム30は、複数の異なる場所54を備え、その場所において、キャリア40、42は、オペレータにより手動で搭載される。例えば、図2aは、4つの場所54を有する搭載プラットフォーム30の一部を示しており、これらのうちの2つは空であり(場所A10’’およびA11’’)、他の2つは搭載される試薬キャリア40を有する。
【0036】
搭載プラットフォーム30は、有利にはキャリア40、42と協働し、自動的に、特定の場所54におけるキャリア40、42の有無、キャリア40、42の種類、およびオペレータが、その場所に適切にキャリア40、42を手動で搭載しているかどうかを検出する。特に、位置インジケータ60は、関連する場所54に置かれた何かの位置を検出するために、各場所54に設けられる。有利には本発明に関するこの目的のために使用され得る構造体は、図2aから図4dに詳細に示されている。
【0037】
位置インジケータ60は、各場所54の後部の近傍で搭載プラットフォーム30の下面に回転可能に固定され、適切なバネ62は、搭載プラットフォーム30の底部に接して上方に位置インジケータ60を偏らせる。開口が、プラットフォーム30に設けられ、これらの開口を通して、位置インジケータ60の突出部分またはナックル64、66、68が、図2aで明らかに示されているとおり突出する。また図2aで最も良く示されているとおり、ナックル66は、また隆起した側壁66aを含む。
【0038】
隆起した棚部70は、各プラットフォーム場所54の両側に設けられ、試薬およびサンプルキャリア40、42の底部は、異なるように構成され、これによりサンプルキャリア42の底部は、棚部70の間の間隔より狭く、その結果、適切に搭載されると、プラットフォーム場所の底部72上に載り(図2b参照)、一方、試薬キャリア40は、棚部70によりプラットフォーム場所の底部72の上方に支持される(図2c参照)。
【0039】
さらに、ナックル64の1つのセットは、プラットフォーム30の最前方に配置され、選択された量をプラットフォームの隆起した前部分76の上方に突出する。隆起した前部分76を通過するように、十分に場所54に押し込まれないキャリア40、42は、ナックル64上に載り、この選択された量で位置インジケータ60を押し下げることは理解されるべきである。
【0040】
ナックル66の第2のセットは、プラットフォームの隆起した前部分76の後方に配置され、異なる選択された量だけプラットフォーム場所の底部72の上方に延びる。これらのナックル66は、サンプルキャリア42の深さと実質的に等しい距離だけ、プラットフォーム場所54の後部から間隔を空けられる。したがって、サンプルキャリア42が、位置54(プラットフォーム場所の底部72上に載る)に適正に搭載されると、サンプルキャリア42は、隆起した前部分76を通り越して、ナックル66の第2のセット(側壁66aの間で)上に載り、これにより、この異なる選択された量をバネ62の付勢力に対抗して位置インジケータ60を押し下げる。
【0041】
ナックル68の第3のセットは、隆起した棚部70の開口を通過して上方に延びる。ナックル68の第3のセットは、プラットフォームの前部からさらに後に間隔を空けられ、試薬キャリア40が、プラットフォーム場所54に適正に搭載されると、試薬キャリア40は、これらのナックル68上に載り、さらに別に選択された量をバネ62の付勢力に対抗して位置インジケータ60を押し下げる。さらに、試薬キャリア40が、プラットフォーム場所54に十分に押し込まれていない場合、ナックル66の第1のセット上、またはナックル66の第2のセットの側壁66a上、または(図3bに示されているとおり)棚部70の前部の隆起した部分70a上(図2a参照)のいずれかの上に載ることができ、いずれの場合においても、略同一量で位置インジケータ60を押し下げることは理解されるべきである。
【0042】
位置インジケータ60が、それぞれの状態において押し下げられることができる選択された距離は、本明細書に説明される特定の実施形態とは異なることが理解されなければならない。さらに、位置インジケータ60は、示される実施形態のように、一端で回転され、ナックルの特定のセットが、位置インジケータ60の反対端で特定の変位を提供するために上に突出する距離は、ピボット軸からのナックルの距離に応じることは理解されなければならない。要するに、示される実施形態のナックル64、66、66a、68に関して説明されたような相対位置および距離は、本発明に従って容易に変更できることは理解されなければならない。
【0043】
キャリア40、42のタイプおよびプラットフォーム30の場所54におけるキャリアの位置に応じて、位置インジケータ60は、それぞれバネ62の付勢力に対抗して異なる位置に押し下げられ、図3aから図4dに最も良く示されるとおり、位置インジケータ60の特定の位置は、自動的に検出されて、その情報が決定されることができる。
【0044】
特に、図3aから図4dは、1つの有利な方法を示しており、この方法においては、位置インジケータ60のそれぞれの位置が、決定されることができ、有利には、各プラットフォーム場所54における特定のキャリア40、42の有無に関して、システム20にフィードバックを提供する。特に、2つの突出部またはイヤー80a、80bは、この軸から離れた位置インジケータ60の端面上に設けられる。イヤー80a、80bは、各プラットフォーム場所54の前面に固定される2つの近接検出器82a、82b(例えばエレクトリックアイ)と位置合わせされる。
【0045】
位置インジケータ60の上部位置において、図3aに示されるように、プラットフォーム場所にキャリア40、42が存在しない場合、2つのイヤー80a、80bは、両方とも、したがってなにも検出しない近接検出器82a、82b(図4a参照)の上方にある。この結果、コンピュータ制御には、単にこの場所54にキャリア40、42が存在しないことを示す2進信号が提供されることができる。
【0046】
キャリア40、42が搭載されるが、場所54に完全には挿入されていない場合、ナックル64の第1のセット上に載るか、または(さらに試薬キャリア40が完全には挿入されていない状態で)図3bに示されているとおり、ナックル68の第3のセット上に部分的に押し下げられるかのどちらかである。この部分的に押し下げられた位置では、1つのイヤー80aは、この関連する近接検出器82aに近接し、他のイヤー80bは、依然としてこの関連する近接検出器82bと間隔を空けられており(図4b参照)、キャリア40、42が、場所54内に位置しているが適正に搭載されていないことを示す信号を生成する。
【0047】
サンプルキャリア42が、場所54に適正に挿入されると、サンプルキャリア42は、ナックル66の第2のセット上に載り(図3c参照)、さらに位置インジケータ60を押し下げ、これによりイヤー80aおよび80bの両方は、関連する近接検出器82a、82bに近接していることが検出され(図4c参照)、この状態を示す適切な信号が生成される。
【0048】
最終的に、試薬キャリア40が、場所54に適正に挿入されると、試薬キャリア40は、ナックル68の第3のセット上に載り(図3d参照)、さらに位置インジケータ60を押し下げ、これにより他のイヤー80bのみが、関連する近接検出器82bに近接していることが検出され(図4d参照)、この状態を示す適切な信号が生成される。
【0049】
状態表示灯82、84(図1および図2a参照)は、また有利には、搭載プラットフォーム30の前面に設けられてもよく、このような表示灯82、84は、各場所54と関連付けられ、オペレータに各場所の状態の鮮明な可視表示を提供する。例えば、場所54が空の場合、この位置に関連付けられた表示灯82、84はどちらも点灯せず、所望される場合、これらは場所54にキャリア40、42を手動で搭載できることをオペレータに示す。キャリア40、42が、場所54に適正に搭載されると、1つの表示灯82は、適切な色(例えば緑)で照らされることができる。キャリア40、42が、特定の場所54と関連付けられているが、この時点でこの場所54にはない(例えば、識別のためにバーコードリーダ46に移されている)場合、この場所54と関連付けられている他の表示灯84は、適切な色(例えば、アンバーまたは黄色)で照らされ、この場所に別のキャリア40、42を置かないことをオペレータに警告する。さらに、キャリア40、42が、特定の場所54に不適正に搭載されている場合、表示灯82、84は、有利には照らされ(例えば点滅により)、問題点を修正するためにオペレータの注意を引くこともできる。
【0050】
キャリア40、42が、プラットフォーム場所54に適正に搭載されかつ検出されると、その後、処理装置22により自動的に処理される。
【0051】
特に、米国特許第6,588,625B2号の図6に詳細に示されているなどの、把持デバイス86を備えるトランスポータ38は、搭載プラットフォーム30の背後で移動のために位置付けられる(米国特許第6,588,625B2号の全開示内容は、参照により本明細書に組み込まれる)。トランスポータ38は、例えば、選択されたプラットフォーム場所54において、キャリア40、42の支持タブ88とこの把持デバイス86を位置合わせするために、ステッパモータなどの適切な駆動装置によりベース位置から移動できる(例えば図3bから図3d参照)。例えば、把持デバイス86は、支持タブ88の下に配置され、その後、把持デバイス86内にタブ88を捕獲するように上昇され(例えば図9aおよび図9b参照)、これにより、キャリア40、42を取り上げ、トランスポータ38を用いてキャリアを移送する。このような動作は、図5aから図5hに示されている。
【0052】
さらに詳細には、図5aでは、トランスポータ38は、試薬キャリア40aの1つの背後に把持デバイス86を備えて配置される。図5aおよび図5bにおける移動矢印90aおよび90bにより示されているとおり、把持デバイス86は、最初に下方位置にあり、その後、キャリアの支持タブ88の下の位置に前方に移動され、その後、上方に移動して、搭載プラットフォーム30から試薬キャリア40aを持ち上げる。プラットフォーム30上の他のキャリア40、42を越えて(すなわち上方に)持ち上げられると(矢印90c参照)、トランスポータ38は、図5cの矢印90c’により示された位置まで回転し、その後トランスポータ38は、バーコードリーダ46に移され(図5dの矢印90d参照)、これにより試薬の容器94a、94b、94cは、リーダ46を通過して連続的に移動され、容器94aから94c上の識別バーコード96を読み取る。
【0053】
試薬の容器94aから94cは、有利にはボトルシート95または他の適切な保持構造体(例えば保持タブ)によりキャリア40に固定され、例えば、容器94a−94cに応じて、摩擦またはスナップ嵌めにより容器94aから94cを確実に保持する。しかし、本発明の1つの形態によれば、容器94aを、そのボトルシート95に対して固定することにより、容器94aがこのボトルシート95と共に回転するようにしなければならないことは理解されるべきである。
【0054】
以下にさらに詳細に説明されるとおり、少なくとも1つの試薬容器94aは、試薬キャリア40の底面に位置する駆動ギヤ98と共に回転するように、キャリア40に適切に固定されることができる。この容器94aは、容器のバーコード読取りのためにバーコードリーダ46に近接して配置され(図5d参照)、有利にはモータ駆動装置48が、駆動ギヤ98に係合され、駆動ギヤ98および取り付けられたボトルシート95および試薬の容器94aを、矢印90d’により示されるように回転させることができる。
【0055】
これは、他の方法では読取りが困難になり得る、容器(すなわち微粒子を含む試薬を収容する容器94a)に対して特に信頼できるバーコードの読取りを提供する。この理由は、このようにすることにより、バーコード96が、いくつかの点において、適正な読取りのためにバーコードリーダ46に対して適切に向けられることを保証するからである。例えば、短い容器は、バーコード96が、容器94の高さを延びるのでなく円筒容器に巻かれることを要求し、有利にはこの方法で読み取られることができる。実際に、各図は、容器94aが、全体に他の試薬容器94bから94cと同一高さであるように示しているが、回転を受ける容器94aは、有利にこれらの他の容器94bから94cより高さが低く、試薬容器94aから94cは有利に(例えば試験の必要条件に基づいて)種々の試薬の量を収容する場合に、小型サイズを可能にするだけではなく、すべての保持される容器94aから94cの均一な上端を可能にすることを理解すべきである。
【0056】
駆動ギヤ98は、以下により詳細に説明されるピニオンタイプギヤであってもよく、バーコードリーダ46に近接するモータ駆動装置48は、ギヤ歯とかみ合う必要はないが、代わりに有利には、円錐形のゴムディスクなどの弾性体のテーパディスクからなることができ、このディスクにより、ギヤ98の底部の外縁と摩擦係合することができる(例えば、キャリア40が、容器94aのバーコード96を読み取るために存在するときに、キャリア40aを円錐形ゴムディスクまで降下させることにより)。これにより、このようなモータ駆動装置48は、ギヤ98と適正に係合し、容器94aが読み取られる間、所望の回転を生じる。
【0057】
この時点で、処理装置22のコンピュータ制御は、各試薬容器94aから94cのアイデンティティを有し、その後、試薬キャリア40aは、バーコードリーダ46を離れて移動し、それぞれ図5eの矢印90eおよび90e’により示されるように回転し、その後、以下に説明されるカルーセル34への格納のために、それぞれ矢印90fおよび90f’により示されるように、プラットフォーム30の他端にまで下げられかつ移動される。
【0058】
プラットフォーム30からバーコードリーダ46までのサンプルキャリア42の移動は、モータ駆動装置48が係合されず、サンプルキャリア42で何も回転されないことを除いて、図5aから図5dに示された移動と同様に達成できる。サンプルに対するバーコード100は、キャリア42上および/またはキャリア42により移送されるサンプルのチューブ上に設けられることができ、全体の高さは、バーコード100がチューブに巻かれるのでなく、チューブの全高に広がることができるには十分な高さである。
【0059】
図5gおよび図5hに示されるとおり、サンプルバーコード100が読み取られ、サンプル識別情報が制御コンピュータに格納されると、サンプルキャリア42は、矢印90gおよび90g’により示されたとおりバーコードリーダ46から離れることができ(試薬キャリア40は、図5eにおいて離れているが)、その後、システム20が、プラットフォーム上で選択された試験を実行できる準備ができているときは、さらなる処理を待つためにプラットフォーム30上の選択された場所54に戻るか、あるいは、サンプル物質を吸引し、それをシステム20の試験部分に移すために使用される、ピペッタまたは他の適切な移送装置に容易にアクセス可能である、プラットフォーム30の背後の用意ができた位置に配置される(図5hの矢印90h参照)か、のいずれかである。
【0060】
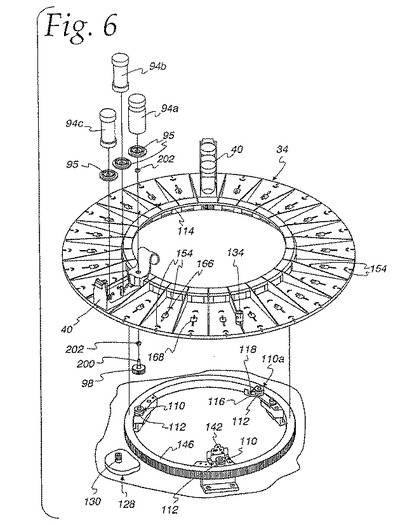
次に、図6から図10を参照する。これらの図は、複数の試薬キャリア40がその上に格納されるカルーセル34を示しており、これにより、その上に搭載される試薬を、システムにより実行される試験に対して要求されるときに容易に利用可能にする。
【0061】
カルーセル34は、図6に示されており、その周りに複数の径方向またはスポーク型キャリア支持場所を画定する。水平面に整列される適切な溝112(例えばv溝)を有する3つのホイール110により、カルーセル34は、中央の垂直軸を中心とする回転に対して適切に支持される。中央の環状フランジ114は、カルーセル34を支持するために3つのホイール110の外側の回りで溝112内に受け入れられる。1つのホイール110aが、バネ118によって、外向きに適切に偏らされている、回転可能なベース116に支持される軸を中心とする回転に対して支持されることができると、これにより、カルーセル34は、内向きに1つのホイール110aを引っ張ることにより回転のために組み付けられることができ、隙間を提供し、フランジ114は、最初に、他の2つのホイール110の溝112に位置合わせされ、その後、1つのホイール110aが、解放され再度溝112にフランジ114を捕獲することができる。
【0062】
環状ギヤ124(図7参照)が、カルーセル34の底部に固定され、底部から下方に延びる。ステッパモータなどの適切な駆動装置128が、駆動ギヤ130を駆動し(図6参照)、駆動ギアは、カルーセルの環状ギヤ124と係合し、中心軸を中心としてカルーセルを回転可能なように駆動し、さらにこの位置を制御する。適切なベース位置インジケータ134(図6参照)が、カルーセル34上に設けられることができ、このようなインジケータ134は、ベース位置の位置を特定するために特定の場所で適正に検出可能である。駆動装置128のステッパモータは、カルーセル34を漸進駆動するように制御され、所望なように様々なキャリア支持場所を選択的に配置する(以下にさらに詳細に説明されるとおり)。
【0063】
各種の試薬キャリア40が、選択されたまたは知られている支持場所でカルーセル34に固定される。このようなキャリア40の搭載は、図5aから図5fに示されるシーケンスにより最初に達成されることができ、試薬キャリア40は、プラットフォーム30に搭載され、容器94aから94cに含まれる試薬を自動的に検出するために、バーコードリーダ46にトランスポータ38により移送され、その後、トランスポータ38によりカルーセル34に移送される。特に、トランスポータ38は、開かれることができるカルーセルのハウジング50(図1参照)のポート140に識別された試薬キャリア40を移送するか、または代替として、アクセスが、ハウジング50内外に試薬キャリア40を移送することを要求されるときに開閉する、制御可能なドアを有することができる。
【0064】
ハウジングポート140は、ハウジング50内の特定の位置に配置される、カルーセルのキャリア支持場所に位置合わせされる。特に、磁気近接検出器142は、以下により詳細に説明されるとおり、この位置でハウジング50内側に固定される。
【0065】
リングギヤ146は、カルーセル34の回転軸と同心に固定して取り付けられ、本明細書でさらに詳細に説明されるとおり、試薬の容器94aを回転させる。
【0066】
図6および図7に示されるとおり、各カルーセルのキャリア支持場所は、一対の隆起した部分154を有するコネクタ150を含み、一対の隆起した部分154は、カルーセル34の上部に一対の径方向に外向きに開いたポケットを画定する。支持場所は、またそれぞれ、バネ162を備えるカルーセル34の底部側面に接続またはスライド部材160を含み、バネ162は、(カルーセル34の中心に向かって)径方向内向きにスライド部材160を偏らせる。底部イヤー164は、スライド部材160から下向きに延び、上部イヤー166は、カルーセル34の上面の上方に上向きに突出するように、カルーセル34の開口168を通して延びる(図6および図9aから図9c参照)。
【0067】
図9aから図9cに最も良く示されるとおり、試薬キャリア40は、支持タブ88の反対端にフィンガタブ170を有する。フィンガタブ170は、有利にはおよび好都合には、処理装置22に最初にキャリア40を搭載するとき、プラットフォーム30にキャリア40を手動で移送するためにオペレータにより使用できる。適切な磁石172が、有利にはフィンガタブ170内に設けられ、この磁石172が、磁気近接検出器142に近接すると検出される(図10参照)。したがって、近接検出器142が、ハウジングポート140の位置と関連付けられると、トランスポータ38を制御して、キャリア40がすでに支持場所に存在する場合、トランスポータが、このカルーセルの支持場所に試薬キャリア40を搭載しようと試みないようにすることができる。すなわち、理想的には、システム20のコンピュータ制御は、何らかのコンピュータ制御の不具合が発生したときに、システムに対して予想される損傷を防止するために、どのカルーセルのキャリア支持場所が、搭載されたキャリア40を有するかを認識しなければならないと同時に、近接検出器142は、トランスポータ38が、キャリア40がすでに存在する場所にキャリア40を強制することを試みないように保証するためのバックアップとして使用されることができる。さらに、近接検出器142は、カルーセル34の位置合わせ支援するために使用されることができ、これにより、支持場所は、ハウジングポート140に正確に位置合わせされる。
【0068】
特に、カルーセル34に試薬キャリア40を搭載することに関して、図7および図9aから図9cが参照される。
【0069】
詳細には、バーコードリーダ46により読み込まれた後に、トランスポータ38は、ハウジングポート140に入るように、図5fに示された位置からキャリア40を移動する。(しかし、キャリア40は、図5fに示されるように下げることはできないが、代わりに、ハウジングポート140への移動の間、図5eに示されたのと同じ高さで保持されることは理解されるべきである)。トランスポータ38が、搭載位置に到達すると、ハウジングポート140に置かれた適切な解放制御装置180を適切に係合する。図示された実施形態では、解放制御装置180は、制御アーム182からなり、制御アーム182は、制御アーム182の一端に接続された作動アーム186を、トランスポータ38(または何らかの移送構成部品)により押される結果として、固定されたポスト184を中心として回転される。適切なバネ等は、反対方向に制御アーム182および作動アーム186を偏らせる傾向がある。制御アームの他端は、フィンガ188を含み、フィンガ188は、ハウジングポート140に置かれるキャリア支持場所と関連付けられるスライド部材160の底部イヤー164と位置合わせされる。したがって、制御アーム182の回転により、フィンガ188がスライド部材160の底部イヤー164を係合し、このバネ162の付勢力に対抗してイヤーを径方向外向きに引っ張る。この位置(図9b)では、トランスポータ38は、支持場所の上方に存在するようにキャリア40を配置し、キャリア40の底部における窪み190は、スライド部材160の上部イヤー166の上方に配置され、この点では、把持デバイス86は下げられ、ハウジングポート140の領域から後退される支持タブ88およびトランスポータ38を解放する(図9c)。
【0070】
トランスポータ38が、ハウジングポート140の領域を離れると、解放制御装置180は、これ以上強制的に、スライド部材の底部イヤー164上に引っ張らず、その結果、スライド部材160は、このバネ162により偏らされ、径方向に内側に(カルーセル34の軸に向かって)スライドされる。これが発生すると、キャリアの窪み190とのこの上部イヤー166の係合によって、スライド部材160は、キャリア40を引張り、キャリア40の底部上のタブ192は、コネクタの隆起した部分154により画定されるポケットに受けられ、キャリア40をカルーセル34に固定する。
【0071】
試薬キャリア40の除去は、好都合にはおよび有利には、逆の順序で達成されてもよいことは理解されるべきである。特に、トランスポータ38は、ハウジングポート140に接近することができ、解放制御装置180を係合し径方向に外向きにスライド部材160を引っ張り、これによりまた(キャリアの窪み190と上部イヤー166の係合によって)キャリア40を外向きに引き、これにより、タブ192は、コネクタ150により画定されるポケットの外に位置する。この位置では、キャリア40は、基本的に自由にカルーセル34上に載り、トランスポータの把持デバイス186によりここから取り上げられかつ除去されることができる。その後トランスポータ38は、キャリア40を搭載プラットフォーム30に戻すことができ、そこからオペレータは、手動でキャリアを除去し、適切であれば、容器94aから94cの補充または交換のいずれかを行うことができる。
【0072】
図6および図9aから図10は、さらに詳細に適切なキャリア40および駆動ギヤ98アセンブリを示している。特に、駆動ギヤ98には、キャリア40のプラットフォームを通って延びる一体シャフト200が設けられることができ、このシャフトは、その上端で、上方の(その上で容器94aが支持される)ボトルシート95と共に回転するように適切に固定されることができる。キャリアのプラットフォームにおけるシャフト200の回転を促進するために、適切な軸受202を設けてもよい。
【0073】
さらに、図6から図7および図9aから図10に示されるとおり、中央開口208が、カルーセル34の各キャリア支持場所に設けられ、これにより、カルーセル34に固定される任意のキャリア40の駆動ギヤ98は、カルーセル34の中央軸に向かって開口208を通して内向きに突出する。このような位置では、固定されたキャリア40の駆動ギヤ98は、すべて、リングギヤ146を係合する。結果的に、カルーセル34が回転すると(すなわち駆動装置128の駆動ギヤ130により)、キャリア駆動ギヤ98は、リングギヤ146を中心として回転し、これにより、カルーセル34により移送されるような惑星状の回転を生じる。その結果、キャリアの駆動ギヤ98は、以前に説明された適切なバーコードの読取りを促進するのに役立つだけではなく、関連付けられたボトルシート95に固定された容器94aを回転するために使用されることが理解されなければならない。このような混合方式は、特に、時間経過に伴い容器94a内に堆積することがある望ましくない微粒子を含む試薬などのいくつかの試薬に対して有利であり得る。その結果、使用中でない場合であっても、カルーセル34は、常に略洗濯機動作のように比較的遅く前後に回転され、試薬は、適切な懸濁状態で維持されることを保証することは理解されなければならない。
【0074】
搭載されると、カルーセル34は、この中央軸を中心として3つの同心リング状に容器94aから94cを移送することは理解されなければならない。冷却された区画ハウジング50は、有利には、貫通する3つの開口220を含み(図1参照)、各開口220は、下方に格納される容器94aから94cの異なるリングと位置合わせされる。このような開口を利用して、試験システム20(例えばそれのピペッタ)にアクセスして、システム20により実行される特定の試験手順により要求される、適切な容器94aから94c(適切にはカルーセル34によりこのような開口220の下方に位置する)から所望の試薬を吸引することができる。
【0075】
上述の説明から、本発明は、自動試験システムにおける試薬およびサンプルの特に有利な処理を提供するために使用できることが理解されなければならない。
【0076】
本発明のさらに他の態様、目的、および利点は、明細書、図面、および特許請求の範囲の検討から得られる。しかし本発明は、代替の形態において使用することもでき、その場合は、本発明の目的および利点および上記に説明された好ましい実施形態のすべてが得えられることはない、ことは理解されるべきである。
【技術分野】
【0001】
本発明は、標本の試験に関し、詳細には、このような試験に使用される試薬などの流体を自動的に処理する装置に関する。
【背景技術】
【0002】
サンプルの生体学標本を試験することは、一般に、例えば、対象物のアイテムの存在を検査するためになされ、このアイテムは、DNA、RNAの特定の領域の全てまたは一部分、断片、補体、ペプチド、ポリペプチド、エンザイム、プリオン、プロテイン、メッセンジャーRNA、トランスファーRNA、ミトコンドリアRNAまたはDNA、抗体、抗原、アレルゲン、細胞、バイロン等などの生物学的エンティティの一部分、表面蛋白、上記のものと機能的同等物、その他であることができまたは含むことができる。患者の体液(例えば、血清、全血、尿、スワブ、血漿、大脳の髄液、リンパ液、固形組織)といった標本は、多数の各種試験を用いて分析され、患者の健康に関する情報を提供できる。
【0003】
このような試験では、標本は、外部環境からまたは標本間であるかどうかによらず、汚染物質が標本に導入されるのを防止する方法で処理されることが必須である。明らかに、1つの標本からのHIVウイルスが、不注意で異なる患者の標本を汚染する可能性がある場合、結果として生じる偽陽性試験結果は、患者への破滅的な精神的影響を有する可能性があり、さらに、後続の試験が後で誤りを見出さなければならない。さらに、このような試験は、極めて影響を受けやすいため、最小量の汚染物であっても、誤った試験結果をもたらすことがある。このような高度な試験では、試験で使用され得る種々の試薬が、同様に適正に処理され、汚染物質を回避するだけでなく、適量の正しい試薬が、適正な回数で使用されることを保証することが必須である。
【0004】
一般に、このような試験は、複数の標本および流体(典型的には、試薬)を処理する自動装置を使用して達成される。例えば、米国特許第6,588,625B2号および米国特許公開第2004/0005714A1号はそれぞれ、この種類の流体および標本を処理するシステムを開示している(これらの開示は、参照により本明細書に組み込まれる)。
【0005】
このような自動装置は、多くの場合、ピペットのセットを使用して、最初の容器(通常、上部が開いたチューブなどのレセプタクル)と標本が処理される容器との間で種々の流体を移動する。例えば、標本は、装置上のラックに装着されたチューブに収容されてもよく、ピペットを保持するヘッドは、プログラム化された運動を通してそのチューブ内にピペットを移動し、そこで真空が加えられて、チューブからピペットに選択された量の標本が抽出される。ヘッドは、その後チューブからピペットを後退させ、別のチューブまたは処理ステーションに置かれた反応容器上に移動し、ピペットから抽出された量の標本を反応容器に注入する。同様の処理を続行して、試薬供給源から適正な試薬(所望の試験に応じる)を得ることができる。
【0006】
このような自動装置の処理ステーションでは、標本は、それぞれ、試験の目的(例えばインキュベーション、調製、消散、溶出、分析、読取等)に従って処理される。例としては、標本は、分析のために、例えば標本からDNAまたはRNAを分離することによって調製され得る。標本が同様に、または代わりに分析されてもよい。通常、このような処理は、各チューブ内の標本に種々の流体(一般には試薬)を加えることを含む。例えば、第1のステップでは、試薬を、各チューブに加えて標本を洗浄してもよく、第2および3(およびそれ以上)の試薬を、他のプロセスを実行中の標本に加えて、例えば、対象とするDNAまたはRNAを解放および/または分離することにより、DNAまたはRNAが、後続の試験のために各チューブ内の標本から抽出されるようにしてよい。標本が、調製された標本の分析の一部として調製された後に、同一または異なる試薬が、チューブに加えられる同様のプロセスがまた実行されてもよい。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】米国特許第6,588,625号明細書
【特許文献2】米国特許出願公開第2004/0005714号明細書
【発明の概要】
【発明が解決しようとする課題】
【0008】
このような自動装置を用いる、試薬および他の流体の処理には問題が生じることがある。上述のヘッドおよびピペットを使用して、試薬を、レセプタクルから処理ステーション内の標本を含むチューブに自動的に移すことができるが、第一に必要なことは、装置上の適正なレセプタクルに適正な試薬を充填し、ヘッドおよびピペットが、プロセス中の適正な時間に適切な標本を含むチューブに適正な試薬を加えることを確実にすることである。
【0009】
従来、適正なレセプタクルに適正な試薬を充填することは、いくつかの異なる方法で達成されてきた。このような手順の1つにおいては、装置を制御する個人が、試薬を手動で計量してレセプタクルに加え、その後これらのレセプタクルを装置に配置する。別のこのような手順では、試薬の充填は、装置自体により自動的に達成され、装置は、ある輸送装置(先に述べたようなヘッドおよびピペットなど)を使用して、装置に設けられた試薬の大量供給源から試薬を移送する。しかし、上述の手順のいずれもが問題を生じる可能性がある。例えば、手動で試薬を加えることは、装置に不正確に試薬のレセプタクルを取り付けるといった、人的エラーを生じる可能性がある。さらに、試薬が正しい量で充填されたとしても、試薬が、装置上の誤った場所に注入され、この結果、ヘッドおよびピペットが、処理の特定のステップにおける使用に対して試薬を自動的に吸入するとき、それが全く誤った試薬である可能性があるか、またはヘッドおよびピペットが試薬を抽出するために移動する場所に、いずれの種類の試薬もが存在しない可能性がある。
【0010】
イリノイ州Abbott ParkのAbbott LaboratoriesのArchitect7 i2000システムは、オペレータが、長期間アナライザと相互作用することから解放され得る、自動操作を提供する高スループットアナライザである。この装置では、試薬の大量供給源は、冷却されたカルーセルに手動で搭載でき、その後アナライザは、試験手順が達成される処理ステーションのために、所望のサンプルおよび試薬を自動的に取得する。試薬およびサンプル用の容器は、システム上の自動トラッキングのためにバーコードが付けられる。各試薬の容器は、多くの試験に対して十分な試薬を収容することができ、その結果、最も一般的に実行される使用法および試験の種類に応じて、いくつかの試薬容器は、長期間カルーセル上に保持されることができる。特に、懸濁微粒子で生成される試薬では、一貫した使用量および投与量は、時間経過に伴って微粒子の沈殿のために悪影響を受ける可能性がある。
【0011】
本発明は、上述などの先行技術の試験システムの試薬およびサンプル処理装置に関する改良を目的としている。
【課題を解決するための手段】
【0012】
本発明の1つの態様では、システム内での試験に使用されるサンプルおよび試薬の処理装置が提供され、この装置は、試薬容器用の少なくとも1つのキャリアと、サンプル容器用の少なくとも1つのキャリアと、容器が試験システム内への搭載のために搭載側から配置され得る複数の場所を画定するプラットフォームとを含む。各場所における位置インジケータは、第1の位置に対して上方向に偏っており、プラットフォームと協働し、これにより位置インジケータは、プラットフォームの関連する位置上にキャリアにより係合され、(a)任意のキャリアが関連する場所において部分的にのみ搭載されるときに、位置インジケータは、第2の位置にあり、(b)サンプルキャリアが関連する場所において適正に搭載されるときに、位置インジケータは、第3の位置にあり、(c)試薬キャリアが関連する場所において適正に搭載されるときに、位置インジケータは、第4の位置にある。センサは、位置インジケータの位置を検出する。
【0013】
本発明のこの態様の1つの形態では、センサは、第1および第2の近接センサからなり、位置インジケータは、第1および第2の近接センサにそれぞれ位置合わせされた第1および第2のイヤー(ear)を含む。第1の位置では、イヤーは、近接センサから離れており、第2の位置では、第1のイヤーは、第1の近接センサの近位にあり、第2のイヤーは、第2の近接センサから離れており、第3の位置では、第1のイヤーは、第1の近接センサの近位にあり、第2のイヤーは、第2の近接センサの近位にあり、第4の位置では、第1のイヤーは、第1の近接センサから離れており、第2のイヤーは、第2の近接センサに近位にある。別の1つの形態では、位置インジケータは、一端をプラットフォームの下に回転可能に固定され、イヤーは、位置インジケータの他方の端部に配置されている。さらに別の形態では、近接センサは、エレクトリックアイであり、イヤーは、エレクトリックアイが遮蔽されると、エレクトリックアイに近接しているとして検出される。
【0014】
本発明のこの態様の別の形態では、プラットフォームは、プラットフォームの各キャリア場所に貫通開口を含み、位置インジケータは、突出部を含み、突出部は、開口を貫通して突き出し、かつ部分的に搭載される位置または適正に搭載される位置のいずれかにおいても、サンプルキャリアまたは試薬キャリアにより選択的に係合されるように構成される。
【0015】
別の形態では、各場所におけるプラットフォームは、注入側に平坦部分および隆起した端部を含み、突出部は、第1および第2のナックル(knuckle)を含む。第1のナックルは、位置インジケータが第1の位置にあるときに、プラットフォームの隆起した端部の上方で第1の距離突出し、第2のナックルは、位置インジケータが第1の位置にあるときに、プラットフォームの平坦部分の上方で第2の距離突出する。部分的に搭載されるキャリアは、隆起した端部上に載り、第1のナックルを係合して、位置インジケータを第2の位置に対して第1の距離だけ強制的に下方に下げ、サンプルおよび試薬キャリアの一方は、プラットフォームに適正に搭載されると、第2のナックルを係合し、位置インジケータを第3および第4の位置の一方に対して強制的に第2の距離だけ下方に下げる。
【0016】
さらに別の形態では、プラットフォームの場所は、プラットフォームの平坦部分の両側に沿った隆起した棚部を含み、この隆起した棚部は、適正に搭載されると、平坦部分の上方に他方のサンプルおよび試薬キャリアを支持するように構成される。第3のナックルは、位置インジケータが第1の位置にあるときに、棚部の上方で第3の距離だけ突き出し、これにより、他方のサンプルおよび試薬キャリアは、プラットフォームに適正に搭載されると、第3のナックルを係合し、位置インジケータを他方の第3および第4の位置に対して第3の距離だけ下方に強制的に下げる。
【0017】
さらに別の形態では、第3の距離は、第2の距離より大きく、第2の距離は、第1の距離より大きい。
【0018】
さらに別の形態では、センサは、第1および第2の近接センサを備え、位置インジケータは、(a)第1の位置で、近接センサから離れ、(b)第2の位置で、第1の近接センサの近位にあり、かつ第2の近接センサから離れ、(c)第3の位置で、第1および第2の近接センサの両方の近位にあり、(d)第4の位置で、第1の近接センサから離れ、かつ第2の近接センサに近位である。別の形態では、近接センサは、エレクトリックアイであり、イヤーは、エレクトリックアイが遮蔽されると、エレクトリックアイに近接しているとして検出される。
【0019】
本発明の別の態様では、搭載プラットフォームと作動格納カルーセルと間でキャリアを移動するように構成されたトランスポータを有する、生物学試験システムに利用可能なキャリアが提供される。キャリアは、試験システムにキャリアを搭載するために、搭載プラットフォームに受けられるように構成されたベース部材と、ベース部材を貫通するピボット軸の一端に回転可能に取り付けできる少なくとも1つのボトルシートとを含み、ボトルシートは、生物学試験に利用できる試薬の容器を確実に設置するように構成され、駆動部材は、ベース部材の下でピボット軸の他端に固定され、駆動部材およびボトルシートは、一緒に回転する。
【0020】
本発明のこの態様の1つの形態では、駆動部材はギヤである。
【0021】
本発明のさらに別の態様では、搭載プラットフォーム、キャリア、バーコードリーダ、およびトランスポータを含む、生物学試験システム用の供給機構体が提供される。キャリアは、試験システムにキャリアを搭載するために、搭載プラットフォームに受けられるように構成されたベース部材と、ベース部材を貫通するピボット軸の一端に回転可能に取り付けできる少なくとも1つのボトルシートとを有し、ボトルシートは、生物学試験に利用可能な試薬の容器を確実に設置するように構成され、駆動部材は、ベース部材の下でピボット軸の他端に固定され、駆動部材およびボトルシートは一緒に回転する。トランスポータは、搭載プラットフォームでキャリアを取り上げ、キャリアをバーコードリーダに移動して、1つのボトルシートに設置された試薬ボトルを識別するバーコードを読むように構成される。1つのボトルシートに設置される試薬のボトルが、バーコードリーダにより読み取られるボトルのバーコードの識別に対して適正な位置に存在する場合、バーコードリーダに隣接する駆動装置は、キャリア駆動部材を係合するように構成される。
【0022】
本発明のさらに別の態様では、軸を中心として回転可能に駆動できる格納カルーセルを含む、生物学試験システム用の供給機構体が提供され、カルーセルは、軸に対して全体に径方向に向けられる格納場所と、選択されるカルーセル格納場所に解放可能に固定できる複数のキャリアと、軸に実質的に中心合わせされるリングギヤとを有する。各キャリアは、試験システムにキャリアを搭載するために搭載プラットフォームに受けられるように構成されたベース部材と、ベース部材を貫通するピボット軸の一端に回転可能に取り付けできる少なくとも1つのボトルシートと、生物学試験に利用可能な試薬の容器を確実に設置するように構成された少なくとも1つのボトルシートと、ベース部材の下でピボット軸の他端に固定される駆動部材とを有し、駆動部材および少なくとも1つのボトルシートは一緒に回転する。リングギヤは、カルーセルに固定されるキャリアの駆動部材を係合し、これにより軸を中心とするカルーセルの回転が、キャリアのピボット軸を中心とするボトルシートを回転させて、設置された容器内の試薬を攪拌する。
【0023】
本発明のさらに別の態様では、生物学試験システムに対する供給機構体が提供され、軸を中心とする回転駆動可能な格納カルーセルを含み、カルーセルは、軸に対して全体に径方向に向けられた格納場所を有し、供給機構体はさらに、カルーセルの格納場所に解放可能に固定できる複数のキャリアと、移動ステーションに配置されたカルーセルの格納場所との間でキャリアを移送するように構成されたトランスポータと、各カルーセルの格納場所においてカルーセルにキャリアを接続するコネクタと、トランスポータが移動ステーションに近接すると、接続を解放するように構成された移動ステーションに近接する解放制御装置とを含む。
【0024】
本発明のこの態様の1つの形態では、コネクタは、各カルーセル格納場所に少なくとも1つのポケットを含み、このポケットは、搭載されたキャリア上のタブを受けて、キャリアを格納場所に固定し、接続部材を各カルーセルの格納場所に固定する。接続部材は、カルーセルの格納場所に置かれたキャリアを、タブがポケットに受けられる位置まで移動する第1の方向に向かって偏らされる。トランスポータが移動ステーションに近接すると、解放制御装置は、トランポータにより係合され、第1の方向とは反対の方向に接続部材を移動させることにより、ポケットからタブを解放する。別の形態では、解放制御装置は、トランスポータにより作動されるレバーであって、移動ステーションにおいて格納場所の接続部材を反対方向に係合して移動させる。さらに別の形態では、バネが、接続部材を第1の方向に偏らせる。
【0025】
本発明のこの態様の別の形態では、バーコードリーダおよび搭載プラットフォームが提供される。この形態では、各キャリアは、試験システムにキャリアを搭載するために、搭載プラットフォームに受けられるように構成されたベース部材と、ベース部材を貫通するピボット軸の一端に回転可能に取り付けできる少なくとも1つのボトルシートとを有し、ボトルシートは、生物学試験に利用可能な試薬の容器を確実に設置するように構成され、各キャリアはさらに、ベース部材の下でピボット軸の他端に固定される駆動部材とを有し、駆動部材およびボトルシートは、一緒に回転する。さらに、トランスポータは、搭載プラットフォームにおいてキャリアを取り上げ、キャリアをバーコードリーダに移動して、少なくとも1つのボトルシートに設置された試薬ボトルを識別するバーコードを読むように構成されている。この形態はさらに、カルーセルの軸に実質的に中心合わせされるリングギヤ、およびバーコードリーダに近接する駆動装置を含む。リングギヤは、カルーセルに固定されるキャリアの駆動部材を係合し、これにより軸を中心とするカルーセルの回転が、設置された容器内の試薬を攪拌するために、キャリアのピボット軸を中心としてボトルシートを回転させる。さらに、1つのボトルシートに設置される試薬のボトルが、バーコードリーダにより読み取られるボトルの識別バーコードに対して適正な位置に存在する場合、バーコードリーダに隣接する駆動装置は、キャリア駆動部材を係合するように構成される。
【図面の簡単な説明】
【0026】
【図1】本発明の試薬およびサンプル処理装置を有する試験システムの一部の斜視図である。
【図2a】本発明による搭載プラットフォームの一部の斜視図である。
【図2b】搭載プラットフォーム上のサンプルキャリアの簡略図である。
【図2c】搭載プラットフォーム上の試薬キャリアの簡略図である。
【図3a】搭載されるキャリアが存在しない搭載プラットフォーム場所の側面図である。
【図3b】試薬キャリアが完全に挿入されていない状態の、搭載プラットフォーム場所の側面図である。
【図3c】サンプルキャリアが搭載されている状態の、搭載プラットフォーム場所の側面図である。
【図3d】試薬キャリアが搭載されている状態の、搭載プラットフォーム場所の側面図である。
【図4a】位置インジケータの図3aの位置の検出を示す、図3aの線4−4に沿った断面図である。
【図4b】図4aに類似するが、位置インジケータが図3bの位置にある状態の断面図である。
【図4c】図4aに類似するが、位置インジケータが図3cの位置にある状態の断面図である。
【図4d】図4aに類似するが、位置インジケータが図3dの位置にある状態の断面図である。
【図5a】本発明の処理装置の一部の連続動作を示しており、試薬キャリアは、バーコードリーダによる識別のためにトランスポータにより搭載プラットフォームから移動され、その後処理装置のカルーセルに向かってバーコードリーダから離れる。
【図5b】本発明の処理装置の一部の連続動作を示しており、試薬キャリアは、バーコードリーダによる識別のためにトランスポータにより搭載プラットフォームから移動され、その後処理装置のカルーセルに向かってバーコードリーダから離れる。
【図5c】本発明の処理装置の一部の連続動作を示しており、試薬キャリアは、バーコードリーダによる識別のためにトランスポータにより搭載プラットフォームから移動され、その後処理装置のカルーセルに向かってバーコードリーダから離れる。
【図5d】本発明の処理装置の一部の連続動作を示しており、試薬キャリアは、バーコードリーダによる識別のためにトランスポータにより搭載プラットフォームから移動され、その後処理装置のカルーセルに向かってバーコードリーダから離れる。
【図5e】本発明の処理装置の一部の連続動作を示しており、試薬キャリアは、バーコードリーダによる識別のためにトランスポータにより搭載プラットフォームから移動され、その後処理装置のカルーセルに向かってバーコードリーダから離れる。
【図5f】本発明の処理装置の一部の連続動作を示しており、試薬キャリアは、バーコードリーダによる識別のためにトランスポータにより搭載プラットフォームから移動され、その後処理装置のカルーセルに向かってバーコードリーダから離れる。
【図5g】図5eに類似し、本発明の処理装置の一部の連続動作を示しており、サンプルキャリアは、バーコードリーダから移動ステーションに移動している。
【図5h】図5fに類似し、本発明の処理装置の一部の連続動作を示しており、サンプルキャリアは、バーコードリーダから移動ステーションに移動している。
【図6】本発明の処理装置のカルーセル部分の分解組立図である。
【図7】カルーセルの一部の底面図である。
【図8】カルーセルの回転および試薬キャリアの駆動ギヤの関連した回転を示した概略図である。
【図9a】カルーセル上への試薬キャリアの搭載を示した断面図である。
【図9b】カルーセル上への試薬キャリアの搭載を示した断面図である。
【図9c】カルーセル上への試薬キャリアの搭載を示した断面図である。
【図10】カルーセル上に固定された試薬キャリアの断面図である。
【発明を実施するための形態】
【0027】
サンプルの生物学試験に使用されることができるなどの試験システム20は、図1に部分的に示されており、特に、試験に使用されるサンプルおよび試薬を処理する処理装置22が示されている。本発明は特に、最も有利には最小のオペレータ介入を必要とする自動試験システムにおいて使用されることができる、処理装置22に関する。詳細には、本発明の処理装置22の様々な特徴は、サンプルおよび試薬の処理を容易にし、これにより、サンプルおよび試薬は、試験システム20内に簡単におよび確実に充填され、その後、所望の試験シーケンスに適正に入力されるように確実および自動的に処理することができる。
【0028】
本発明の処理装置22の様々な特徴は、搭載プラットフォーム30、試薬のカルーセル34、トランスポータまたは移送キャリア38、試薬キャリア40、およびサンプルキャリア42においてそれぞれ提供される。
【0029】
概略的には、オペレータは、サンプルキャリア42に固定された適切なボトルまたは容器にサンプルを充填し、かつ/または試薬キャリア40に固定された適切なボトルまたは容器に試薬を充填し、その後、搭載プラットフォーム30に搭載されるキャリア(40および/または42)を配置する(本明細書における説明は、キャリア40、42から分離され、キャリア40、42により移送される容器を示しているが、一体型キャリアである単一構成部品および容器は、有利に本発明の多くの態様の範囲内で使用できることは理解されるべきである。すなわち、容器自体が、本明細書で説明されるとおり、適正に処理されるように構成されている容器を提供することは、本発明の範囲内であり、容器およびキャリアの機能が、別個の構成部品により提供されることは必要とされない。)。
【0030】
以下に詳細に説明されるとおり、処理装置22は、搭載されるキャリア40、42の種類、およびキャリアが適切に搭載されているかどうかを認識する。適切に搭載されたキャリア40、42が検出されると、トランスポータ38により自動的に取り上げられ、容器および/またはキャリア40、42上のバーコードを読み取る適切なバーコードリーダ46に向かって移動され、このようなデータをシステム20の制御装置に入力する(例えばコンピュータ端末は、システム20を制御するためにオペレータ入力を許可し、当技術分野では知られている、所望の動作を実行することができる)。
【0031】
キャリアがサンプルキャリア42であるとき、トランスポータ38は、搭載プラットフォーム30にキャリアを戻すか、または試験システム20によるアクセスのためにキャリアを準備完了位置に置くことができる。
【0032】
キャリアが試薬キャリア40であるとき、バーコードリーダ46に近接するモータ駆動装置48が係合され、試薬容器の選択された1つを回転させて、バーコードリーダ46によりこのバーコードの読取を容易にする。次に、試薬キャリア40(したがって、その内容物がシステム20に対して識別されている)は、準備完了している格納場所にトランスポータ38により移送され、その中に配置されるカルーセル34上に取り付けられる。図1に示されているとおり、ハウジング50は、搭載プラットフォーム30の一端(バーコードリーダ46とは反対側の端部)に近接して配置され、カルーセル34(図1には示されない)は、ハウジング内に封入される。試薬は、長期間カルーセル34に格納され、このような試薬を要求する試験がオペレータにより必要とされるときに、使用されるために待機することができる。さらに、各試薬の容器は、複数の試験(例えば50回または100回の試験)を実行するために十分な試薬を含み、その結果試薬の容器は、この数の試験により使い果たされるまで、ハウジング50内に維持されることができる。このような格納要件の理由で、ハウジング50の内部は、このような時間の間種々の試薬を適切に格納するために、冷却される区画を確定するように適切に冷却されることができる。
【0033】
試験システム20による試験は、特定の要求されるサンプルおよび試薬を取り上げる任意の適切な手段により(例えば、容器からサンプルおよび試薬を吸引するピペッタまたは他の吸引システムにより)達成されることができ、その後、サンプルおよび試薬を試験領域に移し、その領域で、サンプルおよび試薬は、例えば、所望される特定の試験に対して必要に応じて処理される適切な反応容器に追加される。任意のこのような試験システム20は、有利に本発明において使用されてもよく、このようなシステム20の詳細は、本発明の一部を形成しない。
【0034】
次に、本発明の特定の構成部品を参照する。
【0035】
搭載プラットフォーム30は、図1に示され、図2aから図5hにそれぞれさらに詳細に示されている。搭載プラットフォーム30は、複数の異なる場所54を備え、その場所において、キャリア40、42は、オペレータにより手動で搭載される。例えば、図2aは、4つの場所54を有する搭載プラットフォーム30の一部を示しており、これらのうちの2つは空であり(場所A10’’およびA11’’)、他の2つは搭載される試薬キャリア40を有する。
【0036】
搭載プラットフォーム30は、有利にはキャリア40、42と協働し、自動的に、特定の場所54におけるキャリア40、42の有無、キャリア40、42の種類、およびオペレータが、その場所に適切にキャリア40、42を手動で搭載しているかどうかを検出する。特に、位置インジケータ60は、関連する場所54に置かれた何かの位置を検出するために、各場所54に設けられる。有利には本発明に関するこの目的のために使用され得る構造体は、図2aから図4dに詳細に示されている。
【0037】
位置インジケータ60は、各場所54の後部の近傍で搭載プラットフォーム30の下面に回転可能に固定され、適切なバネ62は、搭載プラットフォーム30の底部に接して上方に位置インジケータ60を偏らせる。開口が、プラットフォーム30に設けられ、これらの開口を通して、位置インジケータ60の突出部分またはナックル64、66、68が、図2aで明らかに示されているとおり突出する。また図2aで最も良く示されているとおり、ナックル66は、また隆起した側壁66aを含む。
【0038】
隆起した棚部70は、各プラットフォーム場所54の両側に設けられ、試薬およびサンプルキャリア40、42の底部は、異なるように構成され、これによりサンプルキャリア42の底部は、棚部70の間の間隔より狭く、その結果、適切に搭載されると、プラットフォーム場所の底部72上に載り(図2b参照)、一方、試薬キャリア40は、棚部70によりプラットフォーム場所の底部72の上方に支持される(図2c参照)。
【0039】
さらに、ナックル64の1つのセットは、プラットフォーム30の最前方に配置され、選択された量をプラットフォームの隆起した前部分76の上方に突出する。隆起した前部分76を通過するように、十分に場所54に押し込まれないキャリア40、42は、ナックル64上に載り、この選択された量で位置インジケータ60を押し下げることは理解されるべきである。
【0040】
ナックル66の第2のセットは、プラットフォームの隆起した前部分76の後方に配置され、異なる選択された量だけプラットフォーム場所の底部72の上方に延びる。これらのナックル66は、サンプルキャリア42の深さと実質的に等しい距離だけ、プラットフォーム場所54の後部から間隔を空けられる。したがって、サンプルキャリア42が、位置54(プラットフォーム場所の底部72上に載る)に適正に搭載されると、サンプルキャリア42は、隆起した前部分76を通り越して、ナックル66の第2のセット(側壁66aの間で)上に載り、これにより、この異なる選択された量をバネ62の付勢力に対抗して位置インジケータ60を押し下げる。
【0041】
ナックル68の第3のセットは、隆起した棚部70の開口を通過して上方に延びる。ナックル68の第3のセットは、プラットフォームの前部からさらに後に間隔を空けられ、試薬キャリア40が、プラットフォーム場所54に適正に搭載されると、試薬キャリア40は、これらのナックル68上に載り、さらに別に選択された量をバネ62の付勢力に対抗して位置インジケータ60を押し下げる。さらに、試薬キャリア40が、プラットフォーム場所54に十分に押し込まれていない場合、ナックル66の第1のセット上、またはナックル66の第2のセットの側壁66a上、または(図3bに示されているとおり)棚部70の前部の隆起した部分70a上(図2a参照)のいずれかの上に載ることができ、いずれの場合においても、略同一量で位置インジケータ60を押し下げることは理解されるべきである。
【0042】
位置インジケータ60が、それぞれの状態において押し下げられることができる選択された距離は、本明細書に説明される特定の実施形態とは異なることが理解されなければならない。さらに、位置インジケータ60は、示される実施形態のように、一端で回転され、ナックルの特定のセットが、位置インジケータ60の反対端で特定の変位を提供するために上に突出する距離は、ピボット軸からのナックルの距離に応じることは理解されなければならない。要するに、示される実施形態のナックル64、66、66a、68に関して説明されたような相対位置および距離は、本発明に従って容易に変更できることは理解されなければならない。
【0043】
キャリア40、42のタイプおよびプラットフォーム30の場所54におけるキャリアの位置に応じて、位置インジケータ60は、それぞれバネ62の付勢力に対抗して異なる位置に押し下げられ、図3aから図4dに最も良く示されるとおり、位置インジケータ60の特定の位置は、自動的に検出されて、その情報が決定されることができる。
【0044】
特に、図3aから図4dは、1つの有利な方法を示しており、この方法においては、位置インジケータ60のそれぞれの位置が、決定されることができ、有利には、各プラットフォーム場所54における特定のキャリア40、42の有無に関して、システム20にフィードバックを提供する。特に、2つの突出部またはイヤー80a、80bは、この軸から離れた位置インジケータ60の端面上に設けられる。イヤー80a、80bは、各プラットフォーム場所54の前面に固定される2つの近接検出器82a、82b(例えばエレクトリックアイ)と位置合わせされる。
【0045】
位置インジケータ60の上部位置において、図3aに示されるように、プラットフォーム場所にキャリア40、42が存在しない場合、2つのイヤー80a、80bは、両方とも、したがってなにも検出しない近接検出器82a、82b(図4a参照)の上方にある。この結果、コンピュータ制御には、単にこの場所54にキャリア40、42が存在しないことを示す2進信号が提供されることができる。
【0046】
キャリア40、42が搭載されるが、場所54に完全には挿入されていない場合、ナックル64の第1のセット上に載るか、または(さらに試薬キャリア40が完全には挿入されていない状態で)図3bに示されているとおり、ナックル68の第3のセット上に部分的に押し下げられるかのどちらかである。この部分的に押し下げられた位置では、1つのイヤー80aは、この関連する近接検出器82aに近接し、他のイヤー80bは、依然としてこの関連する近接検出器82bと間隔を空けられており(図4b参照)、キャリア40、42が、場所54内に位置しているが適正に搭載されていないことを示す信号を生成する。
【0047】
サンプルキャリア42が、場所54に適正に挿入されると、サンプルキャリア42は、ナックル66の第2のセット上に載り(図3c参照)、さらに位置インジケータ60を押し下げ、これによりイヤー80aおよび80bの両方は、関連する近接検出器82a、82bに近接していることが検出され(図4c参照)、この状態を示す適切な信号が生成される。
【0048】
最終的に、試薬キャリア40が、場所54に適正に挿入されると、試薬キャリア40は、ナックル68の第3のセット上に載り(図3d参照)、さらに位置インジケータ60を押し下げ、これにより他のイヤー80bのみが、関連する近接検出器82bに近接していることが検出され(図4d参照)、この状態を示す適切な信号が生成される。
【0049】
状態表示灯82、84(図1および図2a参照)は、また有利には、搭載プラットフォーム30の前面に設けられてもよく、このような表示灯82、84は、各場所54と関連付けられ、オペレータに各場所の状態の鮮明な可視表示を提供する。例えば、場所54が空の場合、この位置に関連付けられた表示灯82、84はどちらも点灯せず、所望される場合、これらは場所54にキャリア40、42を手動で搭載できることをオペレータに示す。キャリア40、42が、場所54に適正に搭載されると、1つの表示灯82は、適切な色(例えば緑)で照らされることができる。キャリア40、42が、特定の場所54と関連付けられているが、この時点でこの場所54にはない(例えば、識別のためにバーコードリーダ46に移されている)場合、この場所54と関連付けられている他の表示灯84は、適切な色(例えば、アンバーまたは黄色)で照らされ、この場所に別のキャリア40、42を置かないことをオペレータに警告する。さらに、キャリア40、42が、特定の場所54に不適正に搭載されている場合、表示灯82、84は、有利には照らされ(例えば点滅により)、問題点を修正するためにオペレータの注意を引くこともできる。
【0050】
キャリア40、42が、プラットフォーム場所54に適正に搭載されかつ検出されると、その後、処理装置22により自動的に処理される。
【0051】
特に、米国特許第6,588,625B2号の図6に詳細に示されているなどの、把持デバイス86を備えるトランスポータ38は、搭載プラットフォーム30の背後で移動のために位置付けられる(米国特許第6,588,625B2号の全開示内容は、参照により本明細書に組み込まれる)。トランスポータ38は、例えば、選択されたプラットフォーム場所54において、キャリア40、42の支持タブ88とこの把持デバイス86を位置合わせするために、ステッパモータなどの適切な駆動装置によりベース位置から移動できる(例えば図3bから図3d参照)。例えば、把持デバイス86は、支持タブ88の下に配置され、その後、把持デバイス86内にタブ88を捕獲するように上昇され(例えば図9aおよび図9b参照)、これにより、キャリア40、42を取り上げ、トランスポータ38を用いてキャリアを移送する。このような動作は、図5aから図5hに示されている。
【0052】
さらに詳細には、図5aでは、トランスポータ38は、試薬キャリア40aの1つの背後に把持デバイス86を備えて配置される。図5aおよび図5bにおける移動矢印90aおよび90bにより示されているとおり、把持デバイス86は、最初に下方位置にあり、その後、キャリアの支持タブ88の下の位置に前方に移動され、その後、上方に移動して、搭載プラットフォーム30から試薬キャリア40aを持ち上げる。プラットフォーム30上の他のキャリア40、42を越えて(すなわち上方に)持ち上げられると(矢印90c参照)、トランスポータ38は、図5cの矢印90c’により示された位置まで回転し、その後トランスポータ38は、バーコードリーダ46に移され(図5dの矢印90d参照)、これにより試薬の容器94a、94b、94cは、リーダ46を通過して連続的に移動され、容器94aから94c上の識別バーコード96を読み取る。
【0053】
試薬の容器94aから94cは、有利にはボトルシート95または他の適切な保持構造体(例えば保持タブ)によりキャリア40に固定され、例えば、容器94a−94cに応じて、摩擦またはスナップ嵌めにより容器94aから94cを確実に保持する。しかし、本発明の1つの形態によれば、容器94aを、そのボトルシート95に対して固定することにより、容器94aがこのボトルシート95と共に回転するようにしなければならないことは理解されるべきである。
【0054】
以下にさらに詳細に説明されるとおり、少なくとも1つの試薬容器94aは、試薬キャリア40の底面に位置する駆動ギヤ98と共に回転するように、キャリア40に適切に固定されることができる。この容器94aは、容器のバーコード読取りのためにバーコードリーダ46に近接して配置され(図5d参照)、有利にはモータ駆動装置48が、駆動ギヤ98に係合され、駆動ギヤ98および取り付けられたボトルシート95および試薬の容器94aを、矢印90d’により示されるように回転させることができる。
【0055】
これは、他の方法では読取りが困難になり得る、容器(すなわち微粒子を含む試薬を収容する容器94a)に対して特に信頼できるバーコードの読取りを提供する。この理由は、このようにすることにより、バーコード96が、いくつかの点において、適正な読取りのためにバーコードリーダ46に対して適切に向けられることを保証するからである。例えば、短い容器は、バーコード96が、容器94の高さを延びるのでなく円筒容器に巻かれることを要求し、有利にはこの方法で読み取られることができる。実際に、各図は、容器94aが、全体に他の試薬容器94bから94cと同一高さであるように示しているが、回転を受ける容器94aは、有利にこれらの他の容器94bから94cより高さが低く、試薬容器94aから94cは有利に(例えば試験の必要条件に基づいて)種々の試薬の量を収容する場合に、小型サイズを可能にするだけではなく、すべての保持される容器94aから94cの均一な上端を可能にすることを理解すべきである。
【0056】
駆動ギヤ98は、以下により詳細に説明されるピニオンタイプギヤであってもよく、バーコードリーダ46に近接するモータ駆動装置48は、ギヤ歯とかみ合う必要はないが、代わりに有利には、円錐形のゴムディスクなどの弾性体のテーパディスクからなることができ、このディスクにより、ギヤ98の底部の外縁と摩擦係合することができる(例えば、キャリア40が、容器94aのバーコード96を読み取るために存在するときに、キャリア40aを円錐形ゴムディスクまで降下させることにより)。これにより、このようなモータ駆動装置48は、ギヤ98と適正に係合し、容器94aが読み取られる間、所望の回転を生じる。
【0057】
この時点で、処理装置22のコンピュータ制御は、各試薬容器94aから94cのアイデンティティを有し、その後、試薬キャリア40aは、バーコードリーダ46を離れて移動し、それぞれ図5eの矢印90eおよび90e’により示されるように回転し、その後、以下に説明されるカルーセル34への格納のために、それぞれ矢印90fおよび90f’により示されるように、プラットフォーム30の他端にまで下げられかつ移動される。
【0058】
プラットフォーム30からバーコードリーダ46までのサンプルキャリア42の移動は、モータ駆動装置48が係合されず、サンプルキャリア42で何も回転されないことを除いて、図5aから図5dに示された移動と同様に達成できる。サンプルに対するバーコード100は、キャリア42上および/またはキャリア42により移送されるサンプルのチューブ上に設けられることができ、全体の高さは、バーコード100がチューブに巻かれるのでなく、チューブの全高に広がることができるには十分な高さである。
【0059】
図5gおよび図5hに示されるとおり、サンプルバーコード100が読み取られ、サンプル識別情報が制御コンピュータに格納されると、サンプルキャリア42は、矢印90gおよび90g’により示されたとおりバーコードリーダ46から離れることができ(試薬キャリア40は、図5eにおいて離れているが)、その後、システム20が、プラットフォーム上で選択された試験を実行できる準備ができているときは、さらなる処理を待つためにプラットフォーム30上の選択された場所54に戻るか、あるいは、サンプル物質を吸引し、それをシステム20の試験部分に移すために使用される、ピペッタまたは他の適切な移送装置に容易にアクセス可能である、プラットフォーム30の背後の用意ができた位置に配置される(図5hの矢印90h参照)か、のいずれかである。
【0060】
次に、図6から図10を参照する。これらの図は、複数の試薬キャリア40がその上に格納されるカルーセル34を示しており、これにより、その上に搭載される試薬を、システムにより実行される試験に対して要求されるときに容易に利用可能にする。
【0061】
カルーセル34は、図6に示されており、その周りに複数の径方向またはスポーク型キャリア支持場所を画定する。水平面に整列される適切な溝112(例えばv溝)を有する3つのホイール110により、カルーセル34は、中央の垂直軸を中心とする回転に対して適切に支持される。中央の環状フランジ114は、カルーセル34を支持するために3つのホイール110の外側の回りで溝112内に受け入れられる。1つのホイール110aが、バネ118によって、外向きに適切に偏らされている、回転可能なベース116に支持される軸を中心とする回転に対して支持されることができると、これにより、カルーセル34は、内向きに1つのホイール110aを引っ張ることにより回転のために組み付けられることができ、隙間を提供し、フランジ114は、最初に、他の2つのホイール110の溝112に位置合わせされ、その後、1つのホイール110aが、解放され再度溝112にフランジ114を捕獲することができる。
【0062】
環状ギヤ124(図7参照)が、カルーセル34の底部に固定され、底部から下方に延びる。ステッパモータなどの適切な駆動装置128が、駆動ギヤ130を駆動し(図6参照)、駆動ギアは、カルーセルの環状ギヤ124と係合し、中心軸を中心としてカルーセルを回転可能なように駆動し、さらにこの位置を制御する。適切なベース位置インジケータ134(図6参照)が、カルーセル34上に設けられることができ、このようなインジケータ134は、ベース位置の位置を特定するために特定の場所で適正に検出可能である。駆動装置128のステッパモータは、カルーセル34を漸進駆動するように制御され、所望なように様々なキャリア支持場所を選択的に配置する(以下にさらに詳細に説明されるとおり)。
【0063】
各種の試薬キャリア40が、選択されたまたは知られている支持場所でカルーセル34に固定される。このようなキャリア40の搭載は、図5aから図5fに示されるシーケンスにより最初に達成されることができ、試薬キャリア40は、プラットフォーム30に搭載され、容器94aから94cに含まれる試薬を自動的に検出するために、バーコードリーダ46にトランスポータ38により移送され、その後、トランスポータ38によりカルーセル34に移送される。特に、トランスポータ38は、開かれることができるカルーセルのハウジング50(図1参照)のポート140に識別された試薬キャリア40を移送するか、または代替として、アクセスが、ハウジング50内外に試薬キャリア40を移送することを要求されるときに開閉する、制御可能なドアを有することができる。
【0064】
ハウジングポート140は、ハウジング50内の特定の位置に配置される、カルーセルのキャリア支持場所に位置合わせされる。特に、磁気近接検出器142は、以下により詳細に説明されるとおり、この位置でハウジング50内側に固定される。
【0065】
リングギヤ146は、カルーセル34の回転軸と同心に固定して取り付けられ、本明細書でさらに詳細に説明されるとおり、試薬の容器94aを回転させる。
【0066】
図6および図7に示されるとおり、各カルーセルのキャリア支持場所は、一対の隆起した部分154を有するコネクタ150を含み、一対の隆起した部分154は、カルーセル34の上部に一対の径方向に外向きに開いたポケットを画定する。支持場所は、またそれぞれ、バネ162を備えるカルーセル34の底部側面に接続またはスライド部材160を含み、バネ162は、(カルーセル34の中心に向かって)径方向内向きにスライド部材160を偏らせる。底部イヤー164は、スライド部材160から下向きに延び、上部イヤー166は、カルーセル34の上面の上方に上向きに突出するように、カルーセル34の開口168を通して延びる(図6および図9aから図9c参照)。
【0067】
図9aから図9cに最も良く示されるとおり、試薬キャリア40は、支持タブ88の反対端にフィンガタブ170を有する。フィンガタブ170は、有利にはおよび好都合には、処理装置22に最初にキャリア40を搭載するとき、プラットフォーム30にキャリア40を手動で移送するためにオペレータにより使用できる。適切な磁石172が、有利にはフィンガタブ170内に設けられ、この磁石172が、磁気近接検出器142に近接すると検出される(図10参照)。したがって、近接検出器142が、ハウジングポート140の位置と関連付けられると、トランスポータ38を制御して、キャリア40がすでに支持場所に存在する場合、トランスポータが、このカルーセルの支持場所に試薬キャリア40を搭載しようと試みないようにすることができる。すなわち、理想的には、システム20のコンピュータ制御は、何らかのコンピュータ制御の不具合が発生したときに、システムに対して予想される損傷を防止するために、どのカルーセルのキャリア支持場所が、搭載されたキャリア40を有するかを認識しなければならないと同時に、近接検出器142は、トランスポータ38が、キャリア40がすでに存在する場所にキャリア40を強制することを試みないように保証するためのバックアップとして使用されることができる。さらに、近接検出器142は、カルーセル34の位置合わせ支援するために使用されることができ、これにより、支持場所は、ハウジングポート140に正確に位置合わせされる。
【0068】
特に、カルーセル34に試薬キャリア40を搭載することに関して、図7および図9aから図9cが参照される。
【0069】
詳細には、バーコードリーダ46により読み込まれた後に、トランスポータ38は、ハウジングポート140に入るように、図5fに示された位置からキャリア40を移動する。(しかし、キャリア40は、図5fに示されるように下げることはできないが、代わりに、ハウジングポート140への移動の間、図5eに示されたのと同じ高さで保持されることは理解されるべきである)。トランスポータ38が、搭載位置に到達すると、ハウジングポート140に置かれた適切な解放制御装置180を適切に係合する。図示された実施形態では、解放制御装置180は、制御アーム182からなり、制御アーム182は、制御アーム182の一端に接続された作動アーム186を、トランスポータ38(または何らかの移送構成部品)により押される結果として、固定されたポスト184を中心として回転される。適切なバネ等は、反対方向に制御アーム182および作動アーム186を偏らせる傾向がある。制御アームの他端は、フィンガ188を含み、フィンガ188は、ハウジングポート140に置かれるキャリア支持場所と関連付けられるスライド部材160の底部イヤー164と位置合わせされる。したがって、制御アーム182の回転により、フィンガ188がスライド部材160の底部イヤー164を係合し、このバネ162の付勢力に対抗してイヤーを径方向外向きに引っ張る。この位置(図9b)では、トランスポータ38は、支持場所の上方に存在するようにキャリア40を配置し、キャリア40の底部における窪み190は、スライド部材160の上部イヤー166の上方に配置され、この点では、把持デバイス86は下げられ、ハウジングポート140の領域から後退される支持タブ88およびトランスポータ38を解放する(図9c)。
【0070】
トランスポータ38が、ハウジングポート140の領域を離れると、解放制御装置180は、これ以上強制的に、スライド部材の底部イヤー164上に引っ張らず、その結果、スライド部材160は、このバネ162により偏らされ、径方向に内側に(カルーセル34の軸に向かって)スライドされる。これが発生すると、キャリアの窪み190とのこの上部イヤー166の係合によって、スライド部材160は、キャリア40を引張り、キャリア40の底部上のタブ192は、コネクタの隆起した部分154により画定されるポケットに受けられ、キャリア40をカルーセル34に固定する。
【0071】
試薬キャリア40の除去は、好都合にはおよび有利には、逆の順序で達成されてもよいことは理解されるべきである。特に、トランスポータ38は、ハウジングポート140に接近することができ、解放制御装置180を係合し径方向に外向きにスライド部材160を引っ張り、これによりまた(キャリアの窪み190と上部イヤー166の係合によって)キャリア40を外向きに引き、これにより、タブ192は、コネクタ150により画定されるポケットの外に位置する。この位置では、キャリア40は、基本的に自由にカルーセル34上に載り、トランスポータの把持デバイス186によりここから取り上げられかつ除去されることができる。その後トランスポータ38は、キャリア40を搭載プラットフォーム30に戻すことができ、そこからオペレータは、手動でキャリアを除去し、適切であれば、容器94aから94cの補充または交換のいずれかを行うことができる。
【0072】
図6および図9aから図10は、さらに詳細に適切なキャリア40および駆動ギヤ98アセンブリを示している。特に、駆動ギヤ98には、キャリア40のプラットフォームを通って延びる一体シャフト200が設けられることができ、このシャフトは、その上端で、上方の(その上で容器94aが支持される)ボトルシート95と共に回転するように適切に固定されることができる。キャリアのプラットフォームにおけるシャフト200の回転を促進するために、適切な軸受202を設けてもよい。
【0073】
さらに、図6から図7および図9aから図10に示されるとおり、中央開口208が、カルーセル34の各キャリア支持場所に設けられ、これにより、カルーセル34に固定される任意のキャリア40の駆動ギヤ98は、カルーセル34の中央軸に向かって開口208を通して内向きに突出する。このような位置では、固定されたキャリア40の駆動ギヤ98は、すべて、リングギヤ146を係合する。結果的に、カルーセル34が回転すると(すなわち駆動装置128の駆動ギヤ130により)、キャリア駆動ギヤ98は、リングギヤ146を中心として回転し、これにより、カルーセル34により移送されるような惑星状の回転を生じる。その結果、キャリアの駆動ギヤ98は、以前に説明された適切なバーコードの読取りを促進するのに役立つだけではなく、関連付けられたボトルシート95に固定された容器94aを回転するために使用されることが理解されなければならない。このような混合方式は、特に、時間経過に伴い容器94a内に堆積することがある望ましくない微粒子を含む試薬などのいくつかの試薬に対して有利であり得る。その結果、使用中でない場合であっても、カルーセル34は、常に略洗濯機動作のように比較的遅く前後に回転され、試薬は、適切な懸濁状態で維持されることを保証することは理解されなければならない。
【0074】
搭載されると、カルーセル34は、この中央軸を中心として3つの同心リング状に容器94aから94cを移送することは理解されなければならない。冷却された区画ハウジング50は、有利には、貫通する3つの開口220を含み(図1参照)、各開口220は、下方に格納される容器94aから94cの異なるリングと位置合わせされる。このような開口を利用して、試験システム20(例えばそれのピペッタ)にアクセスして、システム20により実行される特定の試験手順により要求される、適切な容器94aから94c(適切にはカルーセル34によりこのような開口220の下方に位置する)から所望の試薬を吸引することができる。
【0075】
上述の説明から、本発明は、自動試験システムにおける試薬およびサンプルの特に有利な処理を提供するために使用できることが理解されなければならない。
【0076】
本発明のさらに他の態様、目的、および利点は、明細書、図面、および特許請求の範囲の検討から得られる。しかし本発明は、代替の形態において使用することもでき、その場合は、本発明の目的および利点および上記に説明された好ましい実施形態のすべてが得えられることはない、ことは理解されるべきである。
【特許請求の範囲】
【請求項1】
試験システムにおいて、前記試験システムにおける試験で使用されるサンプルおよび試薬に関する処理装置であって、前記サンプルおよび試薬は、別々のキャリアにより移送可能であり、前記処理装置が、
複数の場所を画定するプラットフォームであって、複数の場所に、容器が、前記試験システムに搭載するために搭載側から配置されることができる、前記プラットフォームと、
各場所において第1の位置に向かって上向きに偏り、かつ前記プラットフォームと協働する位置インジケータとを備え、これにより前記位置インジケータが、前記プラットフォームの関連する位置でキャリアにより係合され、前記位置インジケータは、いずれかのキャリアが関連する場所で部分的に搭載されるときだけ第2の位置に存在し、前記位置インジケータは、サンプルキャリアが関連する場所で適正に搭載されるときに第3の位置に存在し、前記位置インジケータは、試薬のキャリアが関連する場所で適正に搭載されるときに第4の位置に存在し、前記処理装置がさらに、
前記位置インジケータの位置を検出するセンサを備える、サンプルおよび試薬の処理装置。
【請求項2】
前記センサが、第1および第2の近接センサを備え、前記位置インジケータが、それぞれ前記第1および第2の近接センサに位置合わせされた第1および第2のイヤーを含み
前記第1の位置では、前記第1および第2のイヤーは、前記近接センサから離れており、
前記第2の位置では、前記第1のイヤーは、前記第1の近接センサに近接し、前記第2のイヤーは、前記第2の近接センサから離れており、
前記第3の位置では、前記第1のイヤーは、前記第1の近接センサに近接し、前記第2のイヤーは、前記第2の近接センサに近接しており、
前記第4の位置では、前記第1のイヤーは、前記第1の近接センサから離れており、前記第2のイヤーは、前記第2の近接センサに近接している、請求項1に記載のサンプルおよび試薬の処理装置。
【請求項3】
前記位置インジケータが、一端で前記プラットフォームの下で回転可能に固定され、前記第1および第2のイヤーが、前記位置インジケータの他端に配置される、請求項2に記載のサンプルおよび試薬の処理装置。
【請求項4】
前記近接センサが、エレクトリックアイであり、前記第1および第2のイヤーが、前記エレクトリックアイが遮蔽されると、近接しているとして検出される、請求項2に記載のサンプルおよび試薬の処理装置。
【請求項5】
前記プラットフォームが、各プラットフォーム場所で貫通する開口を含み、前記位置インジケータが、突出部を含み、該突出部が、前記開口を通して延び、かつ部分的に搭載された位置または適正に搭載された位置のどちらかで、サンプルキャリアまたは試薬キャリアにより選択的に係合されるように構成される、請求項1に記載のサンプルおよび試薬の処理装置。
【請求項6】
前記プラットフォームが、各場所に前記搭載側に平坦部分および隆起した端部を含み、
前記突出部が、第1および第2のナックルを含み、
前記第1のナックルは、前記位置インジケータが前記第1の位置にあるときに、前記プラットフォームの隆起した端部の上方で第1の距離だけ突出し、
前記第2のナックルは、前記位置インジケータが前記第1の位置にあるときに、前記プラットフォームの平坦部分の上方で第2の距離だけ突出し、
これにより部分的に搭載されるキャリアが、前記隆起した端部に載り、前記第1のナックルを係合し、前記位置インジケータを前記第2の位置に対して前記第1の距離だけ強制的に下げ、
前記サンプルおよび試薬キャリアの一方が、前記プラットフォームで適正に搭載されると、前記第2のナックルを係合し、前記位置インジケータを前記第3および第4の位置の一方に対して第2の距離だけ強制的に下げる、請求項5に記載のサンプルおよび試薬の処理装置。
【請求項7】
前記プラットフォームの場所が、前記プラットフォームの平坦部分の両側に沿って隆起した棚部を含み、前記隆起した棚部は、適正に搭載されると、前記平坦部分の上方で他の前記サンプルおよび試薬のキャリアを支持するように構成され、
さらに、前記位置インジケータが前記第1の位置にあるときに、前記棚部の上方で第3の距離だけ突出する第3のナックルを備え、
これにより、他方の前記サンプルおよび試薬のキャリアは、前記プラットフォームに適正に搭載されると、前記第3のナックルを係合し、前記位置インジケータを他方の前記第3および第4の位置に前記第3の距離だけ強制的に下げる、請求項6に記載のサンプルおよび試薬の処理装置。
【請求項8】
前記第3の距離が、前記第2の距離より長く、前記第2の距離が、前記第1の距離より長い、請求項7に記載のサンプルおよび試薬の処理装置。
【請求項9】
前記センサが、第1および第2の近接センサを備え、前記位置インジケータが、
前記第1の位置では、前記第1および第2の近接センサから離れており、
前記第2の位置では、前記第1の近接センサに近接し、かつ前記第2の近接センサから離れており、
前記第3の位置では、前記第1および第2の近接センサの両方に近接し、
前記第4の位置では、前記第1の近接センサから離れ、かつ前記第2の近接センサに近接する、請求項7に記載のサンプルおよび試薬の処理装置。
【請求項10】
前記位置インジケータが、それぞれ前記第1および第2の近接センサに位置合わせされる第1および第2のイヤーを含み、
前記近接センサが、エレクトリックアイであり、
前記第1および第2のイヤーは、前記エレクトリックアイが遮蔽されると近接しているとして検出される、請求項9に記載のサンプルおよび試薬の処理装置。
【請求項11】
搭載プラットフォームと作動格納カルーセル間とでキャリアを移動するように構成されたトランスポータを有する、生物学試験システムに利用可能なキャリアであって、
前記生物学試験システムに前記キャリアを搭載するために、前記搭載プラットフォームに受けられるように構成されたベース部材と、
前記ベース部材を貫通するピボット軸の一端に回転可能に装着できる少なくとも1つのボトルシートとを備え、前記ボトルシートが、生物学試験に利用可能な試薬の容器を確実に設置するように構成され、前記キャリアがさらに、
前記ベース部材の下で前記ピボット軸の他端に固定される駆動部材を備え、前記駆動部材およびボトルシートが一緒に回転する、キャリア。
【請求項12】
前記駆動部材がギヤである、請求項11に記載のキャリア。
【請求項13】
生物学試験システム用の供給機構体であって、
搭載プラットフォームと、
キャリアとを備え、
前記キャリアが、
前記生物学試験システムに前記キャリアを搭載するために前記搭載プラットフォーム上に受けられるように構成されたベース部材と、
前記ベース部材を貫通するピボット軸の一端上に回転可能に装着できる少なくとも1つのボトルシートとを備え、前記ボトルシートが、生物学試験に利用可能な試薬の容器を確実に設置するように構成され、前記キャリアがさらに、
前記ベース部材の下で前記ピボット軸の他端に固定される駆動部材を備え、前記駆動部材およびボトルシートが共に回転し、
前記供給機構体がさらに、
バーコードリーダと、
前記搭載プラットフォームで前記キャリアを取り上げ、前記1つのボトルシートに設置される試薬のボトルを識別するバーコードを読むための前記バーコードリーダに前記キャリアを移動するように構成されたトランスポータと、
前記バーコードリーダに近接する駆動装置とを備え、前記駆動装置は、前記1つのボトルシートに設置される試薬のボトルが、前記バーコードリーダにより読み取られるためにバーコードリーダを識別する位置にあるときに、前記キャリア駆動部材を係合するように構成される、生物学試験システム用の供給機構体。
【請求項14】
生物学試験システム用の供給機構体であって、
軸を中心として回転可能に駆動できる格納カルーセルを備え、前記格納カルーセルは、前記軸に対して全体に径方向に向けられた格納場所を有し、前記供給機構体がさらに、
選択されたカルーセルの格納場所に解放可能に固定できる複数のキャリアを備え、
各前記キャリアが、
前記生物学試験システムに前記キャリアを搭載するために、前記搭載プラットフォームに受けられるように構成されたベース部材と、
前記ベース部材を貫通するピボット軸の一端に回転可能に装着できる少なくとも1つのボトルシートとを有し、前記ボトルシートが、生物学試験に利用可能な試薬容器を確実に設置するように構成され、各前記キャリアがさらに、
前記ベース部材の下で前記ピボット軸の他端に固定される駆動部材を有し、前記駆動部材およびボトルシートは一緒に回転し、
前記供給機構体が、さらに、
前記軸上に実質的に中心合わせされたリングギヤを備え、前記リングギヤが、前記カルーセルに固定されるキャリアの駆動部材を係合し、これにより前記軸を中心とする前記カルーセルの回転が、設置される容器内の試薬を攪拌するために、前記キャリアの前記ピボット軸を中心として前記少なくとも1つのボトルシートを回転させる、生物学試験システム用の供給機構体。
【請求項15】
生物学試験システム用の供給機構体であって、
軸を中心として回転可能に駆動できる格納カルーセルを備え、前記格納カルーセルが、前記軸に対して全体に径方向に向けられた格納場所を有し、前記供給機構体がさらに、
カルーセルの格納場所に解放可能に固定できる複数のキャリアと、
移動ステーションに配置されるカルーセルの格納場所にかつ格納場所からキャリアを移送するように構成されたトランスポータと、
各前記カルーセルの格納場所において前記カルーセルに前記キャリアを接続するコネクタと、
前記トランスポータが前記移動ステーションに近接すると、前記接続を解放するように構成された前記移動ステーションに近接する解放制御装置とを備えた、生物学試験システム用の供給機構体。
【請求項16】
前記コネクタが、
搭載されるキャリア上のタブを受け、前記格納場所に前記キャリアを固定するように構成された各カルーセル格納場所における少なくとも1つのポケットと、
各カルーセルの格納場所における接続部材とを含み、前記接続部材が、カルーセルの格納場所に置かれるキャリアを、キャリアのタブが前記ポケットに受けられる位置に移動する方向の第1の方向に偏っており、
前記解放制御装置が、前記トランスポータが前記移動ステーションに近接すると、前記ポケットから前記タブを解放するために第1の方向とは反対方向に前記接続部材を移動するために、前記トランポータにより係合される、請求項15に記載の供給機構体。
【請求項17】
前記解放制御装置が、前記反対方向に前記移動ステーションにおける前記格納場所の前記接続部材を係合しかつ移動するために、トランスポータにより作動されるレバーを備える、請求項16に記載の供給機構体。
【請求項18】
前記接続部材を前記第1の方向に偏らせるバネをさらに備える、請求項16に記載の供給機構体。
【請求項19】
バーコードリーダおよび搭載プラットフォームをさらに備え、
各前記キャリアが、
前記試験システムに前記キャリアを搭載するために前記搭載プラットフォームに受けられるように構成されたベース部材と、
前記ベース部材を貫通するピボット軸の一端に回転可能に取り付けできる少なくとも1つのボトルシートとを有し、前記ボトルシートが、生物学試験に利用可能な試薬の容器を確実に設置するように構成され、前記各前記キャリアがさらに、
ベース部材の下で前記ピボット軸の他端に固定される駆動部材を有し、前記駆動部材およびボトルシートが一緒に回転し、
前記トランスポータが、前記搭載プラットフォームで前記キャリアを取り上げ、かつ前記1つのボトルシートで固定された試薬のボトルを識別するバーコードを読むために、前記バーコードリーダに前記キャリアを移動するように構成され、
各前記キャリアがさらに、
前記カルーセルの軸上に実質的に中心合わせされたリングギヤを備え、前記リングギヤが、前記カルーセルに固定されるキャリアの駆動部材を係合し、これにより、前記軸を中心とする前記カルーセルの回転が、固定された容器内で試薬を攪拌するために前記キャリアの前記ピボット軸を中心とする前記少なくとも1つのボトルシートを回転し、各前記キャリアがさらに、
前記バーコードリーダに近接する駆動装置を備え、該駆動装置が、前記1つのボトルシートに設置される試薬のボトルが、前記バーコードリーダにより読まれるためにバーコードの識別する位置にあるとき、前記キャリアの駆動部材を係合するように構成される、請求項15に記載の供給機構体。
【請求項1】
試験システムにおいて、前記試験システムにおける試験で使用されるサンプルおよび試薬に関する処理装置であって、前記サンプルおよび試薬は、別々のキャリアにより移送可能であり、前記処理装置が、
複数の場所を画定するプラットフォームであって、複数の場所に、容器が、前記試験システムに搭載するために搭載側から配置されることができる、前記プラットフォームと、
各場所において第1の位置に向かって上向きに偏り、かつ前記プラットフォームと協働する位置インジケータとを備え、これにより前記位置インジケータが、前記プラットフォームの関連する位置でキャリアにより係合され、前記位置インジケータは、いずれかのキャリアが関連する場所で部分的に搭載されるときだけ第2の位置に存在し、前記位置インジケータは、サンプルキャリアが関連する場所で適正に搭載されるときに第3の位置に存在し、前記位置インジケータは、試薬のキャリアが関連する場所で適正に搭載されるときに第4の位置に存在し、前記処理装置がさらに、
前記位置インジケータの位置を検出するセンサを備える、サンプルおよび試薬の処理装置。
【請求項2】
前記センサが、第1および第2の近接センサを備え、前記位置インジケータが、それぞれ前記第1および第2の近接センサに位置合わせされた第1および第2のイヤーを含み
前記第1の位置では、前記第1および第2のイヤーは、前記近接センサから離れており、
前記第2の位置では、前記第1のイヤーは、前記第1の近接センサに近接し、前記第2のイヤーは、前記第2の近接センサから離れており、
前記第3の位置では、前記第1のイヤーは、前記第1の近接センサに近接し、前記第2のイヤーは、前記第2の近接センサに近接しており、
前記第4の位置では、前記第1のイヤーは、前記第1の近接センサから離れており、前記第2のイヤーは、前記第2の近接センサに近接している、請求項1に記載のサンプルおよび試薬の処理装置。
【請求項3】
前記位置インジケータが、一端で前記プラットフォームの下で回転可能に固定され、前記第1および第2のイヤーが、前記位置インジケータの他端に配置される、請求項2に記載のサンプルおよび試薬の処理装置。
【請求項4】
前記近接センサが、エレクトリックアイであり、前記第1および第2のイヤーが、前記エレクトリックアイが遮蔽されると、近接しているとして検出される、請求項2に記載のサンプルおよび試薬の処理装置。
【請求項5】
前記プラットフォームが、各プラットフォーム場所で貫通する開口を含み、前記位置インジケータが、突出部を含み、該突出部が、前記開口を通して延び、かつ部分的に搭載された位置または適正に搭載された位置のどちらかで、サンプルキャリアまたは試薬キャリアにより選択的に係合されるように構成される、請求項1に記載のサンプルおよび試薬の処理装置。
【請求項6】
前記プラットフォームが、各場所に前記搭載側に平坦部分および隆起した端部を含み、
前記突出部が、第1および第2のナックルを含み、
前記第1のナックルは、前記位置インジケータが前記第1の位置にあるときに、前記プラットフォームの隆起した端部の上方で第1の距離だけ突出し、
前記第2のナックルは、前記位置インジケータが前記第1の位置にあるときに、前記プラットフォームの平坦部分の上方で第2の距離だけ突出し、
これにより部分的に搭載されるキャリアが、前記隆起した端部に載り、前記第1のナックルを係合し、前記位置インジケータを前記第2の位置に対して前記第1の距離だけ強制的に下げ、
前記サンプルおよび試薬キャリアの一方が、前記プラットフォームで適正に搭載されると、前記第2のナックルを係合し、前記位置インジケータを前記第3および第4の位置の一方に対して第2の距離だけ強制的に下げる、請求項5に記載のサンプルおよび試薬の処理装置。
【請求項7】
前記プラットフォームの場所が、前記プラットフォームの平坦部分の両側に沿って隆起した棚部を含み、前記隆起した棚部は、適正に搭載されると、前記平坦部分の上方で他の前記サンプルおよび試薬のキャリアを支持するように構成され、
さらに、前記位置インジケータが前記第1の位置にあるときに、前記棚部の上方で第3の距離だけ突出する第3のナックルを備え、
これにより、他方の前記サンプルおよび試薬のキャリアは、前記プラットフォームに適正に搭載されると、前記第3のナックルを係合し、前記位置インジケータを他方の前記第3および第4の位置に前記第3の距離だけ強制的に下げる、請求項6に記載のサンプルおよび試薬の処理装置。
【請求項8】
前記第3の距離が、前記第2の距離より長く、前記第2の距離が、前記第1の距離より長い、請求項7に記載のサンプルおよび試薬の処理装置。
【請求項9】
前記センサが、第1および第2の近接センサを備え、前記位置インジケータが、
前記第1の位置では、前記第1および第2の近接センサから離れており、
前記第2の位置では、前記第1の近接センサに近接し、かつ前記第2の近接センサから離れており、
前記第3の位置では、前記第1および第2の近接センサの両方に近接し、
前記第4の位置では、前記第1の近接センサから離れ、かつ前記第2の近接センサに近接する、請求項7に記載のサンプルおよび試薬の処理装置。
【請求項10】
前記位置インジケータが、それぞれ前記第1および第2の近接センサに位置合わせされる第1および第2のイヤーを含み、
前記近接センサが、エレクトリックアイであり、
前記第1および第2のイヤーは、前記エレクトリックアイが遮蔽されると近接しているとして検出される、請求項9に記載のサンプルおよび試薬の処理装置。
【請求項11】
搭載プラットフォームと作動格納カルーセル間とでキャリアを移動するように構成されたトランスポータを有する、生物学試験システムに利用可能なキャリアであって、
前記生物学試験システムに前記キャリアを搭載するために、前記搭載プラットフォームに受けられるように構成されたベース部材と、
前記ベース部材を貫通するピボット軸の一端に回転可能に装着できる少なくとも1つのボトルシートとを備え、前記ボトルシートが、生物学試験に利用可能な試薬の容器を確実に設置するように構成され、前記キャリアがさらに、
前記ベース部材の下で前記ピボット軸の他端に固定される駆動部材を備え、前記駆動部材およびボトルシートが一緒に回転する、キャリア。
【請求項12】
前記駆動部材がギヤである、請求項11に記載のキャリア。
【請求項13】
生物学試験システム用の供給機構体であって、
搭載プラットフォームと、
キャリアとを備え、
前記キャリアが、
前記生物学試験システムに前記キャリアを搭載するために前記搭載プラットフォーム上に受けられるように構成されたベース部材と、
前記ベース部材を貫通するピボット軸の一端上に回転可能に装着できる少なくとも1つのボトルシートとを備え、前記ボトルシートが、生物学試験に利用可能な試薬の容器を確実に設置するように構成され、前記キャリアがさらに、
前記ベース部材の下で前記ピボット軸の他端に固定される駆動部材を備え、前記駆動部材およびボトルシートが共に回転し、
前記供給機構体がさらに、
バーコードリーダと、
前記搭載プラットフォームで前記キャリアを取り上げ、前記1つのボトルシートに設置される試薬のボトルを識別するバーコードを読むための前記バーコードリーダに前記キャリアを移動するように構成されたトランスポータと、
前記バーコードリーダに近接する駆動装置とを備え、前記駆動装置は、前記1つのボトルシートに設置される試薬のボトルが、前記バーコードリーダにより読み取られるためにバーコードリーダを識別する位置にあるときに、前記キャリア駆動部材を係合するように構成される、生物学試験システム用の供給機構体。
【請求項14】
生物学試験システム用の供給機構体であって、
軸を中心として回転可能に駆動できる格納カルーセルを備え、前記格納カルーセルは、前記軸に対して全体に径方向に向けられた格納場所を有し、前記供給機構体がさらに、
選択されたカルーセルの格納場所に解放可能に固定できる複数のキャリアを備え、
各前記キャリアが、
前記生物学試験システムに前記キャリアを搭載するために、前記搭載プラットフォームに受けられるように構成されたベース部材と、
前記ベース部材を貫通するピボット軸の一端に回転可能に装着できる少なくとも1つのボトルシートとを有し、前記ボトルシートが、生物学試験に利用可能な試薬容器を確実に設置するように構成され、各前記キャリアがさらに、
前記ベース部材の下で前記ピボット軸の他端に固定される駆動部材を有し、前記駆動部材およびボトルシートは一緒に回転し、
前記供給機構体が、さらに、
前記軸上に実質的に中心合わせされたリングギヤを備え、前記リングギヤが、前記カルーセルに固定されるキャリアの駆動部材を係合し、これにより前記軸を中心とする前記カルーセルの回転が、設置される容器内の試薬を攪拌するために、前記キャリアの前記ピボット軸を中心として前記少なくとも1つのボトルシートを回転させる、生物学試験システム用の供給機構体。
【請求項15】
生物学試験システム用の供給機構体であって、
軸を中心として回転可能に駆動できる格納カルーセルを備え、前記格納カルーセルが、前記軸に対して全体に径方向に向けられた格納場所を有し、前記供給機構体がさらに、
カルーセルの格納場所に解放可能に固定できる複数のキャリアと、
移動ステーションに配置されるカルーセルの格納場所にかつ格納場所からキャリアを移送するように構成されたトランスポータと、
各前記カルーセルの格納場所において前記カルーセルに前記キャリアを接続するコネクタと、
前記トランスポータが前記移動ステーションに近接すると、前記接続を解放するように構成された前記移動ステーションに近接する解放制御装置とを備えた、生物学試験システム用の供給機構体。
【請求項16】
前記コネクタが、
搭載されるキャリア上のタブを受け、前記格納場所に前記キャリアを固定するように構成された各カルーセル格納場所における少なくとも1つのポケットと、
各カルーセルの格納場所における接続部材とを含み、前記接続部材が、カルーセルの格納場所に置かれるキャリアを、キャリアのタブが前記ポケットに受けられる位置に移動する方向の第1の方向に偏っており、
前記解放制御装置が、前記トランスポータが前記移動ステーションに近接すると、前記ポケットから前記タブを解放するために第1の方向とは反対方向に前記接続部材を移動するために、前記トランポータにより係合される、請求項15に記載の供給機構体。
【請求項17】
前記解放制御装置が、前記反対方向に前記移動ステーションにおける前記格納場所の前記接続部材を係合しかつ移動するために、トランスポータにより作動されるレバーを備える、請求項16に記載の供給機構体。
【請求項18】
前記接続部材を前記第1の方向に偏らせるバネをさらに備える、請求項16に記載の供給機構体。
【請求項19】
バーコードリーダおよび搭載プラットフォームをさらに備え、
各前記キャリアが、
前記試験システムに前記キャリアを搭載するために前記搭載プラットフォームに受けられるように構成されたベース部材と、
前記ベース部材を貫通するピボット軸の一端に回転可能に取り付けできる少なくとも1つのボトルシートとを有し、前記ボトルシートが、生物学試験に利用可能な試薬の容器を確実に設置するように構成され、前記各前記キャリアがさらに、
ベース部材の下で前記ピボット軸の他端に固定される駆動部材を有し、前記駆動部材およびボトルシートが一緒に回転し、
前記トランスポータが、前記搭載プラットフォームで前記キャリアを取り上げ、かつ前記1つのボトルシートで固定された試薬のボトルを識別するバーコードを読むために、前記バーコードリーダに前記キャリアを移動するように構成され、
各前記キャリアがさらに、
前記カルーセルの軸上に実質的に中心合わせされたリングギヤを備え、前記リングギヤが、前記カルーセルに固定されるキャリアの駆動部材を係合し、これにより、前記軸を中心とする前記カルーセルの回転が、固定された容器内で試薬を攪拌するために前記キャリアの前記ピボット軸を中心とする前記少なくとも1つのボトルシートを回転し、各前記キャリアがさらに、
前記バーコードリーダに近接する駆動装置を備え、該駆動装置が、前記1つのボトルシートに設置される試薬のボトルが、前記バーコードリーダにより読まれるためにバーコードの識別する位置にあるとき、前記キャリアの駆動部材を係合するように構成される、請求項15に記載の供給機構体。
【図1】


【図2a】
【図2b】
【図2c】
【図3a】
【図3b】
【図3c】
【図3d】
【図4a】
【図4b】
【図4c】
【図4d】
【図5a】
【図5b】
【図5c】
【図5d】
【図5e】
【図5f】
【図5g】
【図5h】
【図6】
【図7】
【図8】
【図9a】
【図9b】
【図9c】
【図10】
【図2a】
【図2b】
【図2c】
【図3a】
【図3b】
【図3c】
【図3d】
【図4a】
【図4b】
【図4c】
【図4d】
【図5a】
【図5b】
【図5c】
【図5d】
【図5e】
【図5f】
【図5g】
【図5h】
【図6】
【図7】
【図8】
【図9a】
【図9b】
【図9c】
【図10】
【公開番号】特開2012−132925(P2012−132925A)
【公開日】平成24年7月12日(2012.7.12)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−19531(P2012−19531)
【出願日】平成24年2月1日(2012.2.1)
【分割の表示】特願2008−510163(P2008−510163)の分割
【原出願日】平成18年5月3日(2006.5.3)
【出願人】(391008788)アボット・ラボラトリーズ (650)
【氏名又は名称原語表記】ABBOTT LABORATORIES
【Fターム(参考)】
【公開日】平成24年7月12日(2012.7.12)
【国際特許分類】
【出願番号】特願2012−19531(P2012−19531)
【出願日】平成24年2月1日(2012.2.1)
【分割の表示】特願2008−510163(P2008−510163)の分割
【原出願日】平成18年5月3日(2006.5.3)
【出願人】(391008788)アボット・ラボラトリーズ (650)
【氏名又は名称原語表記】ABBOTT LABORATORIES
【Fターム(参考)】
[ Back to top ]