
自動調心プーリ

【課題】摩擦ベルトの蛇行・片寄りを安定して防止できるように、最適な揺動抵抗をもつ自動調心プーリを提供する。
【解決手段】プーリ本体10上の摩擦ベルトbに蛇行やベルト幅方向における片寄りが発生したときにプーリ本体10が揺動軸心P回りに蛇行や片寄りを修正する方向に回動するようにした自動調心プーリにおいて、プーリ本体10と該プーリ本体10を揺動軸心P回りに揺動可能に支持する支持部材50との間に介装されてプーリ本体10の揺動に対する抵抗としての摺動摩擦を発生する樹脂部品70について、その動摩擦係数μを0.15≦μ≦0.40とする。
【解決手段】プーリ本体10上の摩擦ベルトbに蛇行やベルト幅方向における片寄りが発生したときにプーリ本体10が揺動軸心P回りに蛇行や片寄りを修正する方向に回動するようにした自動調心プーリにおいて、プーリ本体10と該プーリ本体10を揺動軸心P回りに揺動可能に支持する支持部材50との間に介装されてプーリ本体10の揺動に対する抵抗としての摺動摩擦を発生する樹脂部品70について、その動摩擦係数μを0.15≦μ≦0.40とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、摩擦ベルトに蛇行やベルト幅方向における片寄りが発生したときにそれらを自動的に修正するように作動する自動調心プーリに関するものである。
【背景技術】
【0002】
一般に、平ベルトを用いた伝動装置においては、平ベルトが走行中に蛇行したり、プーリ上においてベルト幅方向の片側に寄って片寄り走行を行うことがある。これは、平ベルトが他の伝動ベルトに比べて、プーリ軸方向における正規位置からのずれや、軸荷重の変化によるプーリ軸のたわみ、プーリ自体の揺れなど、伝動装置を構成する要素の変化に敏感なためである。このような蛇行・片寄り走行を生じた場合、平ベルトが平プーリのフランジに接触して、その平ベルト側端面で毛羽立ちや心線ほつれを生ずる。
【0003】
これに対しては、例えば、特許文献1に記載されているように、平ベルトに接するプーリ本体が平ベルトの走行方向に対して傾くように揺動することで平ベルトの蛇行・片寄りを抑制する機能をもつ自動調心プーリが知られている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−202728号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、上記従来の場合には、プーリ本体の揺動に対し、或る程度の抵抗が働く必要がある。
【0006】
つまり、プーリ本体の揺動に対する抵抗が非常に小さいもしくは全くない場合、プーリ本体はハンチング現象に至り、平ベルトの蛇行・片寄り防止の制御ができなくなる。その反対に、プーリ本体の揺動抵抗が大き過ぎると、平ベルトが片寄ってもすぐに揺動を起こさず、片寄ったままの平ベルトの側端面がプーリ本体のフランジに当たる場合も発生する。従って、このプーリ本体には、或る程度の揺動抵抗が必要となる。
【0007】
そこで、本発明では、摩擦ベルトの蛇行・片寄りを安定して防止できるように、最適な揺動抵抗をもつ自動調心プーリを提供することを主な目的とする。
【課題を解決するための手段】
【0008】
本発明は、上記のような課題に対して、プーリ本体と該プーリ本体を揺動可能に支持する支持部材との間に介装されて揺動抵抗を発生する樹脂部品について、その動摩擦係数を最適化するようにした。
【0009】
具体的には、本発明は、摩擦ベルトが走行可能に巻き掛けられるプーリ本体と、このプーリ本体上の摩擦ベルトにベルト幅方向における片寄りが発生したときに該片寄った側のプーリ本体部分がベルト走行方向前側に変位するように設定された揺動軸心回りに該プーリ本体を揺動可能に支持する支持部材と、これらプーリ本体と支持部材との間に介装されていて、該プーリ本体の揺動に伴って支持部材およびプーリ本体のうちの少なくとも一方との間に摺動摩擦を発生する樹脂部品とを備えた自動調心プーリを前提としている。
【0010】
そして、上記樹脂部品の動摩擦係数μが、0.15≦μ≦0.40とされているものとする。
【0011】
尚、上記の構成において、樹脂部品のベルト幅方向寸法Wを、該樹脂部品のベルト走行方向寸法L以上(W≧L)とすることができる。
【0012】
また、プーリ本体上においてベルト幅方向における摩擦ベルトのベルト幅方向中心の変動するベルト変動領域の少なくとも全体に亘って樹脂部品が存在するようにすることもできる。その際には、樹脂部品の室温(23℃)での曲げ弾性率E[単位:GPa]が、E≧2.5であることが好ましい。
【発明の効果】
【0013】
本発明では、プーリ本体上の摩擦ベルトに蛇行やベルト幅方向における片寄りが発生したときに、プーリ本体が揺動軸心回りにそれらを修正する方向に回動するようにした自動調心プーリにおいて、プーリ本体と該プーリ本体を揺動軸心回りに揺動可能に支持する支持部材との間に介装されてプーリ本体の揺動に対する抵抗としての摺動摩擦を発生する樹脂部品について、動摩擦係数μを0.15≦μ≦0.40とするようにしたので、摺動摩擦力が小さ過ぎることに起因するプーリ本体の揺動のハンチング現象を発生することなく、大き過ぎることのない摺動摩擦力でもって適正に蛇行・片寄り抑制機能を発揮することができる。
【図面の簡単な説明】
【0014】
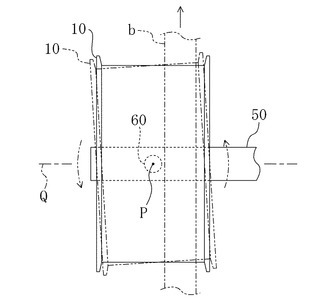
【図1】図1は、本発明の実施形態に係る自動調心プーリの全体構成を示す正面図である。
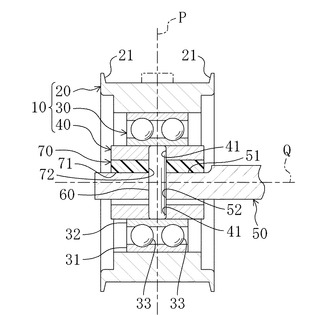
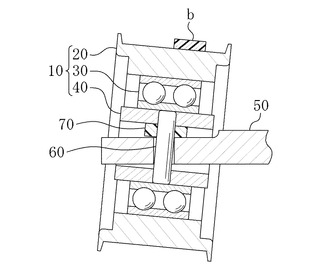
【図2】図2は、図1のII-II線断面図である。
【図3】図3は、平ベルトの片寄りに伴う自動調心プーリの動きを模式的に示す平面図である。
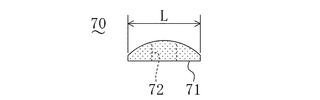
【図4】図4は、自動調心プーリに組み込まれる樹脂部品を示すベルト幅方向に見たときの拡大図である。
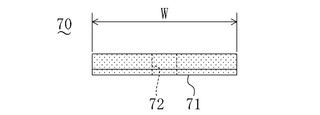
【図5】図5は、ベルト走行方向に見たときの同樹脂部品を示す拡大図である。
【図6】図6は、ベルト幅方向における平ベルトのベルト幅方向中央部の通過領域に対する樹脂部品の配置を示す図2相当図である。
【図7】図7は、ベルト式伝動装置における自動調心プーリの使用例を示す説明図である。
【図8】図8は、樹脂部品のベルト幅方向寸法が小さ過ぎる場合の状態を誇張して示す図2相当図である。
【発明を実施するための形態】
【0015】
以下、本発明の実施形態を、図面に基づいて説明する。
【0016】
図1〜図3は、本実施形態に係る自動調心プーリの全体構成を示しており、この自動調心プーリは、摩擦ベルトとしての平ベルトbを用いたベルト式伝動装置におけるアイドラプーリとして使用される。
【0017】
この自動調心プーリは、平ベルトbが走行可能に巻き掛けられるプーリ本体10と、このプーリ本体10を所定の揺動軸心P回りに揺動自在に支持する支持部材としての軸部材50とを備えていて、プーリ本体10上の平ベルトbに蛇行やベルト幅方向(図2の左右方向)における片寄りが発生したときに、その蛇行や片寄りを修正するようにベルト走行方向(図3の上下方向)に対し左右に斜交い状態になるように揺動する構造になっている。尚、軸部材50は、その基端側において図外の支持体に保持されており、その先端部分においてプーリ本体10を支持している。
【0018】
具体的には、プーリ本体10は、該プーリ本体10に巻き掛けられた平ベルトbに直接に接触する円環状のプーリ部20と、このプーリ部20の内周側に圧入されたベアリング30と、このベアリング30の内周側に圧入された円筒状のカラー40とを有する。プーリ部20の軸方向(図2の左右方向)両端にはフランジ21,21が設けられている。ベアリング30は、プーリ部20の内周側に回転一体に連結された外輪31と、カラー40の外周側に回転一体に連結された内輪32と、これら外輪31および内輪32間に軸方向において2列に並ぶように介装された複数のボール33とを有してなる複列玉軸受である。また、カラー40の軸方向略中央位置において径方向(同図の上下方向)に対向する2箇所の部位には、後述するピンの両端部がそれぞれ係入する断面円形状の係入孔41が形成されている。
【0019】
軸部材50は、その外周断面の基本形状が円形状をなしており、少なくとも先端部分の外径寸法はカラー40の内径寸法よりも小さくされていて、該先端部分がプーリ本体10を該プーリ本体10の軸方向に挿通するように配置されている。また、先端部分(図2の左端部分)の周方向の一部の部位は、軸部材50の軸心Qに平行な平面でもって切り取られた状態の矩形状の平坦面51に形成されている。この平坦面51は、後述の樹脂部品が摺接する摺接面とされている。軸部材50の先端部分には、軸心Qおよび平坦面51にそれぞれ直交する方向(同図の上下方向)に延びる貫通孔52が設けられており、この貫通孔52には、略円柱状をなすピン60が嵌挿されている。ピン60の長さ寸法は、ベアリング30の内輪32の内径寸法と同じかそれよりも僅かに小さく、該ピン60の両端部は、それぞれカラー40の係入孔41に係入している。これにより、プーリ本体10は、ピン60の中心線を揺動軸心Pとしてその揺動軸心P回りに揺動可能となっている。尚、ピン60と、軸部材50およびカラー40のうちの少なくとも一方とは、揺動軸心P回りに相対揺動可能とされている。
【0020】
また、上記軸部材50の平坦面51とカラー40の内周面との間には、樹脂部品70が介装されている。この樹脂部品70の全体形状は、図4および図5にも示すように、軸部材50の平坦面51との対応部位が、該平坦面51と略同じ寸法形状をなす平坦面71に形成されており、この平坦面71は、軸部材50の平坦面51に対する摺接面となっている。一方、樹脂部品70におけるカラー40の内周面との対応部位は、該内周面と同じ曲率半径の断面円弧状をなす湾曲面に形成されており、これにより、樹脂部品70は、カラー40と一体となって揺動するようになっている。つまり、プーリ本体10が軸部材50に対して揺動するとき、その揺動に伴って樹脂部品70の平坦面71と軸部材50の平坦面51との間に摺動摩擦が生じ、その摩擦力が、プーリ本体10の揺動に対する一定の抵抗力として作用するようになっている。
【0021】
そして、本実施形態では、上記樹脂部品70の動摩擦係数μは、0.15≦μ≦0.40とされている。
【0022】
また、本実施形態では、樹脂部品70は、図6に示すように、プーリ本体10上においてベルト幅方向における平ベルトbのベルト幅方向中心mの変動するベルト変動領域Rの全体に亘って配置されている。
【0023】
さらに、本実施形態では、樹脂部品70は、そのベルト幅方向寸法Wがベルト走行方向寸法L以上(W≧L)とされている。
【0024】
ここで、上記のように構成された自動調心プーリの使用方法および作用について説明する。
【0025】
本実施形態の自動調心プーリは、図7に示すように、平プーリからなっていて軸心が互いに平行になるように配置された駆動プーリ80および従動プーリ90間に平ベルトbが巻き渡されたベルト式伝動装置において、その平ベルトbの弛み側スパン(同図の上側スパン)の背面を押圧するように配置される。また、自動調心プーリAの軸部材50は、その軸心Qが両プーリ80,90の軸心に平行になり、かつ、揺動軸心Pと自動調心プーリAおよび駆動プーリ80問のベルトスパンとのなす角度θ1が、揺動軸心Pと自動調心プーリAおよび従動プーリ90間のベルトスパンとのなす角度θ2に略等しい(θ1≒θ2)か、さらには、前者の角度θ1が後者の角度θ2よりも若干小さく(θ1<θ2)なるように配置される。また、軸部材50におけるベルト走行側に樹脂部品70が位置するように配置され、これにより、平ベルトbによりプーリ本体10に加わる軸荷重の略全部が樹脂部品70を介して軸部材50に支承されるようになっている。尚、駆動プーリ80は、同図の時計回り方向に回転し、従って、自動調心プーリA上の平ベルトbは、同図の右方向に走行するものとする。
【0026】
この自動調心プーリAでは、例えば、図8に仮想線で示すように、平ベルトbがプーリ本体10上におけるベルト幅方向中央位置から逸れてベルト幅方向右側へ片寄ると、プーリ本体10に平ベルトbの動力(走行力)が加わって揺動軸心P回りに反時計回り方向の回動力が与えられ、それによってプーリ本体10がベルト走行方向に対して傾き、プーリ本体10はそのベルト走行方向前側の部分がベルト幅方向における平ベルトbの存する側とは反対の側である左側へ変位した状態の斜交いになって回転するようになり、このことで、平ベルトbにプーリ本体10におけるベルト幅方向中央へ戻すカが与えられ、平ベルトbの蛇行・片寄りを防止することになる。
【0027】
そして、上記のようにプーリ本体10が揺動軸心P回りに揺動する際に、自動調心プーリAでは、平ベルトbの張力を受け、プーリ部20、ベアリング30、カラー40とカが伝わり、樹脂部品70が押圧されて該樹脂部品70の平坦面71と軸部材50の平坦面51との間に摩擦力が発生し、この摩擦力が、平ベルトbが逸れて片寄るのに伴うプーリ本体10の揺動に対する抵抗力となる。
【0028】
次に、樹脂部品70の材料について、その動摩擦係数μなどの物性との関係でもって詳しく説明する。
【0029】
先ず、一般に、樹脂においては、配合物の種類や配合量により、或る範囲で摩擦係数を任意に設定できるので、配合処方を行った樹脂を用いて成形し、その樹脂部品70を得ることができる。また、樹脂部品70には、圧縮の荷重が働くので、プーリ本体10の揺動に悪影響を与えるような変形を行わない程度の剛性が必要となる。
【0030】
そこで、先ず、摺動材としての樹脂部品70に使用する材料のベースとなる樹脂については、熱可塑性樹脂材を用いる。そのような熱可塑性樹脂材としては特に制限はないが、平ベルトbが走行している間はベアリング30の発熱により高温状態になるため、耐熱性のある樹脂が好ましい。具体的には、6−ナイロン、66−ナイロン、芳香族ナイロン、46−ナイロンといったアミド系樹脂が比較的衝撃性も高いことから、当該樹脂部品に使用するには好ましい。また、ポリカーボネート、ポリフェニレンスルフィド、ポリエーテルイミドなど汎用エンプラからスーパーエンプラまで用いることもできる。また、ポリエチレン、ポリプロピレン、ポリスチレンなどの汎用樹脂も使用できないことはないが、融点が上記エンプラに比べて低いため、熱の影響を受けにくいような条件での使用という制約を受ける。
【0031】
上記樹脂部品70は、繰返しの摺動運動を受けるため、耐摩耗性を向上させるべく、炭素繊維もしくはアラミド短繊維やポリフェニレンベンゾオキサゾール短繊維などの有機繊維を5〜30wt%配合する場合がある。また、当該樹脂部品70は圧縮の荷重を受け続けるため、部品自身がつぶれないようにする上では或る程度以上の剛性も必要となるので、上記短繊維での補強効果も期待できる。尚、補強短繊維としてはガラス短繊維が一般的ではあるが、ガラス短繊維は摺動する相手を著しく摩耗させるので、かかる摺動を受ける樹脂には好ましくない。
【0032】
上記樹脂部品70においては動摩擦係数μの平均値が、0.15≦μ≦0.40の範囲である必要がある。動摩擦係数μの平均値が0.40を超える(μ>0.40)の場合、平ベルトbがベルト幅方向中央より逸れても、プーリ本体10の揺動に対する抵抗が大きくなり、平ベルトbの蛇行・片寄りの修正が容易にはできなくなる。一方、動摩擦係数μの平均値が0.15未満(μ<0.15)であれば、プーリ本体10の揺動に対する抵抗が小さ過ぎてハンチング現象を招き易くなり、平ベルトbの蛇行・片寄りを安定して抑制することは困難となる。尚、より安定した平ベルトbの制御を行うのであれば、動摩擦係数μの平均値が、0.18≦μ≦0.30である樹脂を用いるのが好ましい。
【0033】
かかる樹脂の組成としては、ベースとなるナイロンなどの樹脂に炭素繊維やアラミド繊維を5〜30wt%含有させたものになると考えられるが、繊維物だけを加えると動摩擦係数μが0.40以上になるため、その動摩擦係数μを下げるべく、ポリテトラフルオロエチレン(以下、PTFEという)の粉末を配合する。このようにPTFEの添加量を調整することで、動摩擦係数μの平均値を0.15〜0.40の範囲で調整することができる。また、PTFEと併用して黒鉛や二硫化モリブデンを配合しても同じ効果が期待できる。
【0034】
比較的容易に入手できる市販の樹脂材として、PTFE、もしくは、PTFEベースであって改質のために黒鉛などの個体潤滑剤やフィラーを配合した組成物がある。かかるPTFE組成物の曲げ弾性率E[単位:GPa]は、0.3≦E≦0.6であり、一般的な樹脂と比較すると低い水準にある。このような曲げ弾性率Eの水準のPTFE組成物を樹脂部品70に使用し、ベルト張力が300Nである一般産業用伝動システムに組み込んで作動させたところ、平ベルトbから受ける圧縮の荷重により当該樹脂部品70がつぶれてプーリ本体10の揺動を抑制してしまい、平ベルトbの蛇行・片寄りの制御が不能になってしまった。従って、PTFEベースで樹脂部品70を作製する場合、ガラス繊維または炭素繊維で補強を行い、曲げ弾性率Eを高めてつぶれないようにする配慮が必要となる。一方、PTFEに炭素繊維を10wt%配合したものは、淀川ヒューテック株式会社より購入でき、このPTFE組成物の室温下(23℃)での曲げ弾性率Eは2.5程度(E≒2.5)である。この組成物を樹脂部品70に使用してベルト張力が300Nである一般産業用伝動システムに組み込んで作動させたところ、つぶれずに平ベルトbの蛇行・片寄りの制御が行われた。これらの結果に基づくと、樹脂部品70に使用する樹脂組成物の曲げ弾性率Eは、E≧2.5であることが好ましいと考えられる。また、樹脂部品70に使用する樹脂組成物は、その使用中における高温時(例えば120℃)での曲げ弾性率Eが0.8以上であることが好ましい。尚、PTFE組成物については、実際に使用すると摩耗が大きく、樹脂部品70としては使用できない場合があるので注意が必要である。
【0035】
次に、上記ベルト変動領域Rの略全体に亘るように樹脂部品70を配置する理由を説明する。それは、仮に、樹脂部品70のベルト幅方向寸法Wがベルト変動領域Rのベルト幅方向寸法よりも小さくて該樹脂部品7がそのベルト変動領域Rの全体をカバーしない場合には、平ベルトbがプーリ本体10上におけるベルト幅方向の最側端を走行するときに、図8に誇張して示すように、ベルト走行方向に略直交する面内におけるモーメント(同図に示す例では時計回り方向のモーメント)がピン60に発生し、その結果、プーリ本体10のスムーズな揺動が行えなくなり、平ベルトbの蛇行・片寄りの抑制に困難を来すことになるからである。従って、プーリ本体10上における平ベルトbの左右の変動幅を考慮して、例えばベアリング30の内輪32の幅寸法と同じくらいのベルト幅方向寸法Wをもった樹脂部品70の形状が好ましい。
【0036】
また、樹脂部品70のベルト幅方向寸法Wと、ベルト走行方向寸法Lとの関係については、摺動摩擦の発生機能という点では特に何らの制限を受けるものではなく、例えば、ベルト幅方向寸法Wとベルト走行方向寸法Lとが互いに等しく(W=L)ても構わない。しかし、ベルト走行方向寸法Lを大きく確保しようとすれば、軸部材50の平坦面51のベルト走行方向寸法が大きくなるために、軸部材50自体が大径化し、それに伴い、ベアリング30として内輪32の内径の大きなものが必要となり、ベアリング30の種類の制限を受けることになるため、自動調心プーリAの実使用範囲が狭くなる。従って、少なくとも、樹脂部品70のベルト幅方向寸法Wとベルト走行方向寸法Lとが互いに等しくなるような寸法形状の設計は、必要最小限に止めるべきである。
【0037】
従って、本実施形態では、平ベルトbが走行可能に巻き掛けられるプーリ本体10と、このプーリ本体10上の平ベルトbにベルト幅方向における片寄りが発生したとき該片寄った側のプーリ本体10部分がベルト走行方向前側に変位するように設定された揺動軸心P回りに該プーリ本体10を揺動可能に支持する軸部材50と、これらプーリ本体10と軸部材50との間に介装されていて、該プーリ本体10の揺動に伴って該揺動に対する抵抗となる摺動摩擦力を軸部材50との間に発生する樹脂部品70とを備えた自動調心プーリAにおいて、樹脂部品70の動摩擦係数μを、0.15≦μ≦0.40とするようにしたので、上記摺動摩擦力が小さ過ぎることに起因するプーリ本体10のハンチング現象を発生することなく、大き過ぎることのない摺動摩擦力でもって適正に蛇行・片寄り抑制機能を発揮することができる。
【0038】
尚、上記の実施形態では、樹脂部品70の形状を略蒲鉾形とするようにしているが、例えば、円板など、種々の形状に形成することができる。
【0039】
一蛇行・片寄り抑制機能の評価テスト−
ここで、各々、組成の異なる複数類の樹脂部品を作製し、その樹脂部品の組み込まれた自動調心プーリにおける蛇行・片寄り抑制機能を評価するために行ったテストについて説明する。樹脂部品の種類としては、上記実施形態の実施例として5種類(実施例1〜5)を、また、比較例として3種類(比較例1〜3)をそれぞれ用意した。尚、実施例1〜5および比較例1〜3の各樹脂部品の寸法形状は共通である。
【0040】
テストの要領としては、3軸レイアウト(図7参照)上で平ベルトを5日間走行させ、蛇行・片寄り抑制機能が安定して作用するか否かでもって評価した。また、樹脂部品の主な作製方法としては、樹脂および配合物を混合し、ミキサーにより均一になるように撹拌した後、その混合物を二軸押出機により混線してペレットとし、そのペレットを用いて射出成形により作製した。
【0041】
また、各樹脂部品のサンプル片を作製し、その動摩擦係数μおよび曲げ弾性率Eの測定を行った。動摩擦係数μの測定には、株式会社エー・アンド・デイ製の摩擦摩耗試験機である「EFM−III」を用いた。具体的には、上記混合物のリング形状のサンプル片を作製する一方、相手材としては炭素鋼S45C(JIS G4051)を使用して同じくリング形状のものを切削により作製し、両者を荷重400N、リングの回転速度0.5mm/sにて摺動させ、24時間の摺動後、動摩擦係数μの平均値を算出した。また、曲げ弾性率Eについては、ISO178に準じた方法を用いて測定した。
【0042】
以下は、実施例1〜5および比較例1〜3の各樹脂部品の組成であり、実施例1〜5の結果を、次表1に、また、比較例1〜3の結果を、次表2にそれぞれ示す。
【実施例1】
【0043】
樹脂部品の組成として、炭素繊維およびPTFEが樹脂に配合されたものとした。炭素繊維としては、弾性率の高いPAN系のものを使用した。かかる炭素繊維は、例えば、東レ株式会社製、三菱レイヨン株式会社製、東邦テナックス株式会社製のものが使用できる。PTFEとしては、ダイキン工業株式会社製である平均粒径300μmのものを使用した。樹脂としては、耐熱性、経済性、吸水性を考慮して芳香族ナイロンを使用した。かかる芳香族ナイロンは、例えば、クラレ株式会社製、エムス昭和電工株式会社製のものが使用できる。それらの配合率は、炭素繊維を20wt%、PTFEを20wt%、芳香族ナイロンを60wt%とした。
【実施例2】
【0044】
実施例1の場合と同じ炭素繊維、PTFE、芳香族ナイロンを使用した。但し、それらの配合率は、炭素繊維を15wt%、PTFEを25wt%、芳香族ナイロンを60wt%とした。
【実施例3】
【0045】
実施例1の場合と同じ嚴素繊維、PTFE、芳香族ナイロンを使用した。但し、それらの配合率は、炭素繊維を20wt%、PTFEを10wt%、芳香族ナイロンを70wt%とした。
【実施例4】
【0046】
実施例1の場合と同じ炭素繊維および芳香族ナイロンを使用する一方、PTFEに代えて、アラミド短繊維を使用した。かかるアラミド短繊維は、例えば、帝人株式会社製のものが使用できる。それらの配合率は、炭素繊維を15wt%、芳香族ナイロンを75wt%、アラミド短繊維を10wt%とした。
【実施例5】
【0047】
実施例1の場合と同じPTFEおよび芳香族ナイロンを使用する一方、炭素繊維に代えて、実施例4の場合と同じアラミド短繊維を使用した。それらの配合率は、PTFEを5wt%、芳香族ナイロンを75wt%、アラミド短繊維を15wt%とした。
【比較例1】
【0048】
実施例1の場合と同じ芳香族ナイロン(ペレット状)のみを使用し、炭素繊維およびPTFEは省略した。
【比較例2】
【0049】
実施例1の場合と同じPTFEおよび芳香族ナイロンを使用し、炭素繊維は省略した。それらの配合率は、PTFEを30wt%、芳香族ナイロンを70wt%とした。
【比較例3】
【0050】
実施例1の場合と同じ炭素繊維およびPTFEを使用し、芳香族ナイロンは省略した。それらの配合率は、炭素繊維を5wt%、PTFEを85wt%とした。尚、この比較例3の場合には、混合物をプレスにより成形し、それを切削加工により形を整えて樹脂部品とした。
【0051】
【表1】

【0052】
【表2】
【0053】
上記の表1からは、動摩擦係数μの平均値が、0.15≦μ≦0.40であれば、蛇行・片寄り制御性が正常に機能することが判る。これに対し、比較例1の場合には、動摩擦係数μが大き過ぎ(μ=0.48>0.40)てプーリ本体の揺動が重く、正常な機能は果たさなかった。一方、比較例3の場合には、動摩擦係数μが小さ過ぎ(μ=0.11<0.15)てプーリ本体の揺動にハンチングが生じ、やはり、正常な機能は果たさなかった。
【0054】
また、曲げ弾性率Eについては、実施例1〜5では、その値が最小である実施例5(E=2.5)を含めて、つぶれなどの不具合は発生しなかった。これに対し、比較例2の場合には、つぶれてしまって、正常な機能は果たさなかった。これは、曲げ弾性率Eが低過ぎる(E=1.8<2.5)ためであると考えられる。
【産業上の利用可能性】
【0055】
本発明に係る自動調心プーリは、平ベルトを用いたベルト式伝動装置におけるアイドラプーリなどとして利用することができる。
【符号の説明】
【0056】
10 プーリ本体
50 軸部材(支持部材)
70 樹脂部品
A 自動調心プーリ
P 揺動軸心
W (樹脂部品の)ベルト幅方向寸法
L (樹脂部品の)ベルト走行方向寸法
b 平ベルト(摩擦伝動ベルト)
【技術分野】
【0001】
本発明は、摩擦ベルトに蛇行やベルト幅方向における片寄りが発生したときにそれらを自動的に修正するように作動する自動調心プーリに関するものである。
【背景技術】
【0002】
一般に、平ベルトを用いた伝動装置においては、平ベルトが走行中に蛇行したり、プーリ上においてベルト幅方向の片側に寄って片寄り走行を行うことがある。これは、平ベルトが他の伝動ベルトに比べて、プーリ軸方向における正規位置からのずれや、軸荷重の変化によるプーリ軸のたわみ、プーリ自体の揺れなど、伝動装置を構成する要素の変化に敏感なためである。このような蛇行・片寄り走行を生じた場合、平ベルトが平プーリのフランジに接触して、その平ベルト側端面で毛羽立ちや心線ほつれを生ずる。
【0003】
これに対しては、例えば、特許文献1に記載されているように、平ベルトに接するプーリ本体が平ベルトの走行方向に対して傾くように揺動することで平ベルトの蛇行・片寄りを抑制する機能をもつ自動調心プーリが知られている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−202728号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、上記従来の場合には、プーリ本体の揺動に対し、或る程度の抵抗が働く必要がある。
【0006】
つまり、プーリ本体の揺動に対する抵抗が非常に小さいもしくは全くない場合、プーリ本体はハンチング現象に至り、平ベルトの蛇行・片寄り防止の制御ができなくなる。その反対に、プーリ本体の揺動抵抗が大き過ぎると、平ベルトが片寄ってもすぐに揺動を起こさず、片寄ったままの平ベルトの側端面がプーリ本体のフランジに当たる場合も発生する。従って、このプーリ本体には、或る程度の揺動抵抗が必要となる。
【0007】
そこで、本発明では、摩擦ベルトの蛇行・片寄りを安定して防止できるように、最適な揺動抵抗をもつ自動調心プーリを提供することを主な目的とする。
【課題を解決するための手段】
【0008】
本発明は、上記のような課題に対して、プーリ本体と該プーリ本体を揺動可能に支持する支持部材との間に介装されて揺動抵抗を発生する樹脂部品について、その動摩擦係数を最適化するようにした。
【0009】
具体的には、本発明は、摩擦ベルトが走行可能に巻き掛けられるプーリ本体と、このプーリ本体上の摩擦ベルトにベルト幅方向における片寄りが発生したときに該片寄った側のプーリ本体部分がベルト走行方向前側に変位するように設定された揺動軸心回りに該プーリ本体を揺動可能に支持する支持部材と、これらプーリ本体と支持部材との間に介装されていて、該プーリ本体の揺動に伴って支持部材およびプーリ本体のうちの少なくとも一方との間に摺動摩擦を発生する樹脂部品とを備えた自動調心プーリを前提としている。
【0010】
そして、上記樹脂部品の動摩擦係数μが、0.15≦μ≦0.40とされているものとする。
【0011】
尚、上記の構成において、樹脂部品のベルト幅方向寸法Wを、該樹脂部品のベルト走行方向寸法L以上(W≧L)とすることができる。
【0012】
また、プーリ本体上においてベルト幅方向における摩擦ベルトのベルト幅方向中心の変動するベルト変動領域の少なくとも全体に亘って樹脂部品が存在するようにすることもできる。その際には、樹脂部品の室温(23℃)での曲げ弾性率E[単位:GPa]が、E≧2.5であることが好ましい。
【発明の効果】
【0013】
本発明では、プーリ本体上の摩擦ベルトに蛇行やベルト幅方向における片寄りが発生したときに、プーリ本体が揺動軸心回りにそれらを修正する方向に回動するようにした自動調心プーリにおいて、プーリ本体と該プーリ本体を揺動軸心回りに揺動可能に支持する支持部材との間に介装されてプーリ本体の揺動に対する抵抗としての摺動摩擦を発生する樹脂部品について、動摩擦係数μを0.15≦μ≦0.40とするようにしたので、摺動摩擦力が小さ過ぎることに起因するプーリ本体の揺動のハンチング現象を発生することなく、大き過ぎることのない摺動摩擦力でもって適正に蛇行・片寄り抑制機能を発揮することができる。
【図面の簡単な説明】
【0014】
【図1】図1は、本発明の実施形態に係る自動調心プーリの全体構成を示す正面図である。
【図2】図2は、図1のII-II線断面図である。
【図3】図3は、平ベルトの片寄りに伴う自動調心プーリの動きを模式的に示す平面図である。
【図4】図4は、自動調心プーリに組み込まれる樹脂部品を示すベルト幅方向に見たときの拡大図である。
【図5】図5は、ベルト走行方向に見たときの同樹脂部品を示す拡大図である。
【図6】図6は、ベルト幅方向における平ベルトのベルト幅方向中央部の通過領域に対する樹脂部品の配置を示す図2相当図である。
【図7】図7は、ベルト式伝動装置における自動調心プーリの使用例を示す説明図である。
【図8】図8は、樹脂部品のベルト幅方向寸法が小さ過ぎる場合の状態を誇張して示す図2相当図である。
【発明を実施するための形態】
【0015】
以下、本発明の実施形態を、図面に基づいて説明する。
【0016】
図1〜図3は、本実施形態に係る自動調心プーリの全体構成を示しており、この自動調心プーリは、摩擦ベルトとしての平ベルトbを用いたベルト式伝動装置におけるアイドラプーリとして使用される。
【0017】
この自動調心プーリは、平ベルトbが走行可能に巻き掛けられるプーリ本体10と、このプーリ本体10を所定の揺動軸心P回りに揺動自在に支持する支持部材としての軸部材50とを備えていて、プーリ本体10上の平ベルトbに蛇行やベルト幅方向(図2の左右方向)における片寄りが発生したときに、その蛇行や片寄りを修正するようにベルト走行方向(図3の上下方向)に対し左右に斜交い状態になるように揺動する構造になっている。尚、軸部材50は、その基端側において図外の支持体に保持されており、その先端部分においてプーリ本体10を支持している。
【0018】
具体的には、プーリ本体10は、該プーリ本体10に巻き掛けられた平ベルトbに直接に接触する円環状のプーリ部20と、このプーリ部20の内周側に圧入されたベアリング30と、このベアリング30の内周側に圧入された円筒状のカラー40とを有する。プーリ部20の軸方向(図2の左右方向)両端にはフランジ21,21が設けられている。ベアリング30は、プーリ部20の内周側に回転一体に連結された外輪31と、カラー40の外周側に回転一体に連結された内輪32と、これら外輪31および内輪32間に軸方向において2列に並ぶように介装された複数のボール33とを有してなる複列玉軸受である。また、カラー40の軸方向略中央位置において径方向(同図の上下方向)に対向する2箇所の部位には、後述するピンの両端部がそれぞれ係入する断面円形状の係入孔41が形成されている。
【0019】
軸部材50は、その外周断面の基本形状が円形状をなしており、少なくとも先端部分の外径寸法はカラー40の内径寸法よりも小さくされていて、該先端部分がプーリ本体10を該プーリ本体10の軸方向に挿通するように配置されている。また、先端部分(図2の左端部分)の周方向の一部の部位は、軸部材50の軸心Qに平行な平面でもって切り取られた状態の矩形状の平坦面51に形成されている。この平坦面51は、後述の樹脂部品が摺接する摺接面とされている。軸部材50の先端部分には、軸心Qおよび平坦面51にそれぞれ直交する方向(同図の上下方向)に延びる貫通孔52が設けられており、この貫通孔52には、略円柱状をなすピン60が嵌挿されている。ピン60の長さ寸法は、ベアリング30の内輪32の内径寸法と同じかそれよりも僅かに小さく、該ピン60の両端部は、それぞれカラー40の係入孔41に係入している。これにより、プーリ本体10は、ピン60の中心線を揺動軸心Pとしてその揺動軸心P回りに揺動可能となっている。尚、ピン60と、軸部材50およびカラー40のうちの少なくとも一方とは、揺動軸心P回りに相対揺動可能とされている。
【0020】
また、上記軸部材50の平坦面51とカラー40の内周面との間には、樹脂部品70が介装されている。この樹脂部品70の全体形状は、図4および図5にも示すように、軸部材50の平坦面51との対応部位が、該平坦面51と略同じ寸法形状をなす平坦面71に形成されており、この平坦面71は、軸部材50の平坦面51に対する摺接面となっている。一方、樹脂部品70におけるカラー40の内周面との対応部位は、該内周面と同じ曲率半径の断面円弧状をなす湾曲面に形成されており、これにより、樹脂部品70は、カラー40と一体となって揺動するようになっている。つまり、プーリ本体10が軸部材50に対して揺動するとき、その揺動に伴って樹脂部品70の平坦面71と軸部材50の平坦面51との間に摺動摩擦が生じ、その摩擦力が、プーリ本体10の揺動に対する一定の抵抗力として作用するようになっている。
【0021】
そして、本実施形態では、上記樹脂部品70の動摩擦係数μは、0.15≦μ≦0.40とされている。
【0022】
また、本実施形態では、樹脂部品70は、図6に示すように、プーリ本体10上においてベルト幅方向における平ベルトbのベルト幅方向中心mの変動するベルト変動領域Rの全体に亘って配置されている。
【0023】
さらに、本実施形態では、樹脂部品70は、そのベルト幅方向寸法Wがベルト走行方向寸法L以上(W≧L)とされている。
【0024】
ここで、上記のように構成された自動調心プーリの使用方法および作用について説明する。
【0025】
本実施形態の自動調心プーリは、図7に示すように、平プーリからなっていて軸心が互いに平行になるように配置された駆動プーリ80および従動プーリ90間に平ベルトbが巻き渡されたベルト式伝動装置において、その平ベルトbの弛み側スパン(同図の上側スパン)の背面を押圧するように配置される。また、自動調心プーリAの軸部材50は、その軸心Qが両プーリ80,90の軸心に平行になり、かつ、揺動軸心Pと自動調心プーリAおよび駆動プーリ80問のベルトスパンとのなす角度θ1が、揺動軸心Pと自動調心プーリAおよび従動プーリ90間のベルトスパンとのなす角度θ2に略等しい(θ1≒θ2)か、さらには、前者の角度θ1が後者の角度θ2よりも若干小さく(θ1<θ2)なるように配置される。また、軸部材50におけるベルト走行側に樹脂部品70が位置するように配置され、これにより、平ベルトbによりプーリ本体10に加わる軸荷重の略全部が樹脂部品70を介して軸部材50に支承されるようになっている。尚、駆動プーリ80は、同図の時計回り方向に回転し、従って、自動調心プーリA上の平ベルトbは、同図の右方向に走行するものとする。
【0026】
この自動調心プーリAでは、例えば、図8に仮想線で示すように、平ベルトbがプーリ本体10上におけるベルト幅方向中央位置から逸れてベルト幅方向右側へ片寄ると、プーリ本体10に平ベルトbの動力(走行力)が加わって揺動軸心P回りに反時計回り方向の回動力が与えられ、それによってプーリ本体10がベルト走行方向に対して傾き、プーリ本体10はそのベルト走行方向前側の部分がベルト幅方向における平ベルトbの存する側とは反対の側である左側へ変位した状態の斜交いになって回転するようになり、このことで、平ベルトbにプーリ本体10におけるベルト幅方向中央へ戻すカが与えられ、平ベルトbの蛇行・片寄りを防止することになる。
【0027】
そして、上記のようにプーリ本体10が揺動軸心P回りに揺動する際に、自動調心プーリAでは、平ベルトbの張力を受け、プーリ部20、ベアリング30、カラー40とカが伝わり、樹脂部品70が押圧されて該樹脂部品70の平坦面71と軸部材50の平坦面51との間に摩擦力が発生し、この摩擦力が、平ベルトbが逸れて片寄るのに伴うプーリ本体10の揺動に対する抵抗力となる。
【0028】
次に、樹脂部品70の材料について、その動摩擦係数μなどの物性との関係でもって詳しく説明する。
【0029】
先ず、一般に、樹脂においては、配合物の種類や配合量により、或る範囲で摩擦係数を任意に設定できるので、配合処方を行った樹脂を用いて成形し、その樹脂部品70を得ることができる。また、樹脂部品70には、圧縮の荷重が働くので、プーリ本体10の揺動に悪影響を与えるような変形を行わない程度の剛性が必要となる。
【0030】
そこで、先ず、摺動材としての樹脂部品70に使用する材料のベースとなる樹脂については、熱可塑性樹脂材を用いる。そのような熱可塑性樹脂材としては特に制限はないが、平ベルトbが走行している間はベアリング30の発熱により高温状態になるため、耐熱性のある樹脂が好ましい。具体的には、6−ナイロン、66−ナイロン、芳香族ナイロン、46−ナイロンといったアミド系樹脂が比較的衝撃性も高いことから、当該樹脂部品に使用するには好ましい。また、ポリカーボネート、ポリフェニレンスルフィド、ポリエーテルイミドなど汎用エンプラからスーパーエンプラまで用いることもできる。また、ポリエチレン、ポリプロピレン、ポリスチレンなどの汎用樹脂も使用できないことはないが、融点が上記エンプラに比べて低いため、熱の影響を受けにくいような条件での使用という制約を受ける。
【0031】
上記樹脂部品70は、繰返しの摺動運動を受けるため、耐摩耗性を向上させるべく、炭素繊維もしくはアラミド短繊維やポリフェニレンベンゾオキサゾール短繊維などの有機繊維を5〜30wt%配合する場合がある。また、当該樹脂部品70は圧縮の荷重を受け続けるため、部品自身がつぶれないようにする上では或る程度以上の剛性も必要となるので、上記短繊維での補強効果も期待できる。尚、補強短繊維としてはガラス短繊維が一般的ではあるが、ガラス短繊維は摺動する相手を著しく摩耗させるので、かかる摺動を受ける樹脂には好ましくない。
【0032】
上記樹脂部品70においては動摩擦係数μの平均値が、0.15≦μ≦0.40の範囲である必要がある。動摩擦係数μの平均値が0.40を超える(μ>0.40)の場合、平ベルトbがベルト幅方向中央より逸れても、プーリ本体10の揺動に対する抵抗が大きくなり、平ベルトbの蛇行・片寄りの修正が容易にはできなくなる。一方、動摩擦係数μの平均値が0.15未満(μ<0.15)であれば、プーリ本体10の揺動に対する抵抗が小さ過ぎてハンチング現象を招き易くなり、平ベルトbの蛇行・片寄りを安定して抑制することは困難となる。尚、より安定した平ベルトbの制御を行うのであれば、動摩擦係数μの平均値が、0.18≦μ≦0.30である樹脂を用いるのが好ましい。
【0033】
かかる樹脂の組成としては、ベースとなるナイロンなどの樹脂に炭素繊維やアラミド繊維を5〜30wt%含有させたものになると考えられるが、繊維物だけを加えると動摩擦係数μが0.40以上になるため、その動摩擦係数μを下げるべく、ポリテトラフルオロエチレン(以下、PTFEという)の粉末を配合する。このようにPTFEの添加量を調整することで、動摩擦係数μの平均値を0.15〜0.40の範囲で調整することができる。また、PTFEと併用して黒鉛や二硫化モリブデンを配合しても同じ効果が期待できる。
【0034】
比較的容易に入手できる市販の樹脂材として、PTFE、もしくは、PTFEベースであって改質のために黒鉛などの個体潤滑剤やフィラーを配合した組成物がある。かかるPTFE組成物の曲げ弾性率E[単位:GPa]は、0.3≦E≦0.6であり、一般的な樹脂と比較すると低い水準にある。このような曲げ弾性率Eの水準のPTFE組成物を樹脂部品70に使用し、ベルト張力が300Nである一般産業用伝動システムに組み込んで作動させたところ、平ベルトbから受ける圧縮の荷重により当該樹脂部品70がつぶれてプーリ本体10の揺動を抑制してしまい、平ベルトbの蛇行・片寄りの制御が不能になってしまった。従って、PTFEベースで樹脂部品70を作製する場合、ガラス繊維または炭素繊維で補強を行い、曲げ弾性率Eを高めてつぶれないようにする配慮が必要となる。一方、PTFEに炭素繊維を10wt%配合したものは、淀川ヒューテック株式会社より購入でき、このPTFE組成物の室温下(23℃)での曲げ弾性率Eは2.5程度(E≒2.5)である。この組成物を樹脂部品70に使用してベルト張力が300Nである一般産業用伝動システムに組み込んで作動させたところ、つぶれずに平ベルトbの蛇行・片寄りの制御が行われた。これらの結果に基づくと、樹脂部品70に使用する樹脂組成物の曲げ弾性率Eは、E≧2.5であることが好ましいと考えられる。また、樹脂部品70に使用する樹脂組成物は、その使用中における高温時(例えば120℃)での曲げ弾性率Eが0.8以上であることが好ましい。尚、PTFE組成物については、実際に使用すると摩耗が大きく、樹脂部品70としては使用できない場合があるので注意が必要である。
【0035】
次に、上記ベルト変動領域Rの略全体に亘るように樹脂部品70を配置する理由を説明する。それは、仮に、樹脂部品70のベルト幅方向寸法Wがベルト変動領域Rのベルト幅方向寸法よりも小さくて該樹脂部品7がそのベルト変動領域Rの全体をカバーしない場合には、平ベルトbがプーリ本体10上におけるベルト幅方向の最側端を走行するときに、図8に誇張して示すように、ベルト走行方向に略直交する面内におけるモーメント(同図に示す例では時計回り方向のモーメント)がピン60に発生し、その結果、プーリ本体10のスムーズな揺動が行えなくなり、平ベルトbの蛇行・片寄りの抑制に困難を来すことになるからである。従って、プーリ本体10上における平ベルトbの左右の変動幅を考慮して、例えばベアリング30の内輪32の幅寸法と同じくらいのベルト幅方向寸法Wをもった樹脂部品70の形状が好ましい。
【0036】
また、樹脂部品70のベルト幅方向寸法Wと、ベルト走行方向寸法Lとの関係については、摺動摩擦の発生機能という点では特に何らの制限を受けるものではなく、例えば、ベルト幅方向寸法Wとベルト走行方向寸法Lとが互いに等しく(W=L)ても構わない。しかし、ベルト走行方向寸法Lを大きく確保しようとすれば、軸部材50の平坦面51のベルト走行方向寸法が大きくなるために、軸部材50自体が大径化し、それに伴い、ベアリング30として内輪32の内径の大きなものが必要となり、ベアリング30の種類の制限を受けることになるため、自動調心プーリAの実使用範囲が狭くなる。従って、少なくとも、樹脂部品70のベルト幅方向寸法Wとベルト走行方向寸法Lとが互いに等しくなるような寸法形状の設計は、必要最小限に止めるべきである。
【0037】
従って、本実施形態では、平ベルトbが走行可能に巻き掛けられるプーリ本体10と、このプーリ本体10上の平ベルトbにベルト幅方向における片寄りが発生したとき該片寄った側のプーリ本体10部分がベルト走行方向前側に変位するように設定された揺動軸心P回りに該プーリ本体10を揺動可能に支持する軸部材50と、これらプーリ本体10と軸部材50との間に介装されていて、該プーリ本体10の揺動に伴って該揺動に対する抵抗となる摺動摩擦力を軸部材50との間に発生する樹脂部品70とを備えた自動調心プーリAにおいて、樹脂部品70の動摩擦係数μを、0.15≦μ≦0.40とするようにしたので、上記摺動摩擦力が小さ過ぎることに起因するプーリ本体10のハンチング現象を発生することなく、大き過ぎることのない摺動摩擦力でもって適正に蛇行・片寄り抑制機能を発揮することができる。
【0038】
尚、上記の実施形態では、樹脂部品70の形状を略蒲鉾形とするようにしているが、例えば、円板など、種々の形状に形成することができる。
【0039】
一蛇行・片寄り抑制機能の評価テスト−
ここで、各々、組成の異なる複数類の樹脂部品を作製し、その樹脂部品の組み込まれた自動調心プーリにおける蛇行・片寄り抑制機能を評価するために行ったテストについて説明する。樹脂部品の種類としては、上記実施形態の実施例として5種類(実施例1〜5)を、また、比較例として3種類(比較例1〜3)をそれぞれ用意した。尚、実施例1〜5および比較例1〜3の各樹脂部品の寸法形状は共通である。
【0040】
テストの要領としては、3軸レイアウト(図7参照)上で平ベルトを5日間走行させ、蛇行・片寄り抑制機能が安定して作用するか否かでもって評価した。また、樹脂部品の主な作製方法としては、樹脂および配合物を混合し、ミキサーにより均一になるように撹拌した後、その混合物を二軸押出機により混線してペレットとし、そのペレットを用いて射出成形により作製した。
【0041】
また、各樹脂部品のサンプル片を作製し、その動摩擦係数μおよび曲げ弾性率Eの測定を行った。動摩擦係数μの測定には、株式会社エー・アンド・デイ製の摩擦摩耗試験機である「EFM−III」を用いた。具体的には、上記混合物のリング形状のサンプル片を作製する一方、相手材としては炭素鋼S45C(JIS G4051)を使用して同じくリング形状のものを切削により作製し、両者を荷重400N、リングの回転速度0.5mm/sにて摺動させ、24時間の摺動後、動摩擦係数μの平均値を算出した。また、曲げ弾性率Eについては、ISO178に準じた方法を用いて測定した。
【0042】
以下は、実施例1〜5および比較例1〜3の各樹脂部品の組成であり、実施例1〜5の結果を、次表1に、また、比較例1〜3の結果を、次表2にそれぞれ示す。
【実施例1】
【0043】
樹脂部品の組成として、炭素繊維およびPTFEが樹脂に配合されたものとした。炭素繊維としては、弾性率の高いPAN系のものを使用した。かかる炭素繊維は、例えば、東レ株式会社製、三菱レイヨン株式会社製、東邦テナックス株式会社製のものが使用できる。PTFEとしては、ダイキン工業株式会社製である平均粒径300μmのものを使用した。樹脂としては、耐熱性、経済性、吸水性を考慮して芳香族ナイロンを使用した。かかる芳香族ナイロンは、例えば、クラレ株式会社製、エムス昭和電工株式会社製のものが使用できる。それらの配合率は、炭素繊維を20wt%、PTFEを20wt%、芳香族ナイロンを60wt%とした。
【実施例2】
【0044】
実施例1の場合と同じ炭素繊維、PTFE、芳香族ナイロンを使用した。但し、それらの配合率は、炭素繊維を15wt%、PTFEを25wt%、芳香族ナイロンを60wt%とした。
【実施例3】
【0045】
実施例1の場合と同じ嚴素繊維、PTFE、芳香族ナイロンを使用した。但し、それらの配合率は、炭素繊維を20wt%、PTFEを10wt%、芳香族ナイロンを70wt%とした。
【実施例4】
【0046】
実施例1の場合と同じ炭素繊維および芳香族ナイロンを使用する一方、PTFEに代えて、アラミド短繊維を使用した。かかるアラミド短繊維は、例えば、帝人株式会社製のものが使用できる。それらの配合率は、炭素繊維を15wt%、芳香族ナイロンを75wt%、アラミド短繊維を10wt%とした。
【実施例5】
【0047】
実施例1の場合と同じPTFEおよび芳香族ナイロンを使用する一方、炭素繊維に代えて、実施例4の場合と同じアラミド短繊維を使用した。それらの配合率は、PTFEを5wt%、芳香族ナイロンを75wt%、アラミド短繊維を15wt%とした。
【比較例1】
【0048】
実施例1の場合と同じ芳香族ナイロン(ペレット状)のみを使用し、炭素繊維およびPTFEは省略した。
【比較例2】
【0049】
実施例1の場合と同じPTFEおよび芳香族ナイロンを使用し、炭素繊維は省略した。それらの配合率は、PTFEを30wt%、芳香族ナイロンを70wt%とした。
【比較例3】
【0050】
実施例1の場合と同じ炭素繊維およびPTFEを使用し、芳香族ナイロンは省略した。それらの配合率は、炭素繊維を5wt%、PTFEを85wt%とした。尚、この比較例3の場合には、混合物をプレスにより成形し、それを切削加工により形を整えて樹脂部品とした。
【0051】
【表1】
【0052】
【表2】
【0053】
上記の表1からは、動摩擦係数μの平均値が、0.15≦μ≦0.40であれば、蛇行・片寄り制御性が正常に機能することが判る。これに対し、比較例1の場合には、動摩擦係数μが大き過ぎ(μ=0.48>0.40)てプーリ本体の揺動が重く、正常な機能は果たさなかった。一方、比較例3の場合には、動摩擦係数μが小さ過ぎ(μ=0.11<0.15)てプーリ本体の揺動にハンチングが生じ、やはり、正常な機能は果たさなかった。
【0054】
また、曲げ弾性率Eについては、実施例1〜5では、その値が最小である実施例5(E=2.5)を含めて、つぶれなどの不具合は発生しなかった。これに対し、比較例2の場合には、つぶれてしまって、正常な機能は果たさなかった。これは、曲げ弾性率Eが低過ぎる(E=1.8<2.5)ためであると考えられる。
【産業上の利用可能性】
【0055】
本発明に係る自動調心プーリは、平ベルトを用いたベルト式伝動装置におけるアイドラプーリなどとして利用することができる。
【符号の説明】
【0056】
10 プーリ本体
50 軸部材(支持部材)
70 樹脂部品
A 自動調心プーリ
P 揺動軸心
W (樹脂部品の)ベルト幅方向寸法
L (樹脂部品の)ベルト走行方向寸法
b 平ベルト(摩擦伝動ベルト)
【特許請求の範囲】
【請求項1】
摩擦ベルトが走行可能に巻き掛けられるプーリ本体と、
上記プーリ本体上の摩擦ベルトにベルト幅方向における片寄りが発生したときに該片寄った側のプーリ本体部分がベルト走行方向前側に変位するように設定された揺動軸心回りに該プーリ本体を揺動可能に支持する支持部材と、
上記プーリ本体と支持部材との間に介装され、該プーリ本体の揺動に伴って支持部材およびプーリ本体のうちの少なくとも一方との間に摺動摩擦を発生する樹脂部品とを備えた自動調心プーリであって、
上記樹脂部品の動摩擦係数μが、0.15≦μ≦0.40であることを特徴とする自動調心プーリ。
【請求項2】
樹脂部品のベルト幅方向寸法が、該樹脂部品のベルト走行方向寸法以上であることを特徴とする請求項1に記載の自動調心プーリ。
【請求項3】
プーリ本体に加わる軸荷重の略全部が樹脂部品を介して支持部材に支承されるように設けられ、
上記樹脂部品は、プーリ本体上においてベルト幅方向における摩擦ベルトのベルト幅方向中心の変動するベルト変動領域の全体に亘って配置されていることを特徴とする請求項1に記載の自動調心プーリ。
【請求項4】
樹脂部品の室温での曲げ弾性率Eが、E≧2.5GPaであることを特徴とする請求項3に記載の自動調心プーリ。
【請求項1】
摩擦ベルトが走行可能に巻き掛けられるプーリ本体と、
上記プーリ本体上の摩擦ベルトにベルト幅方向における片寄りが発生したときに該片寄った側のプーリ本体部分がベルト走行方向前側に変位するように設定された揺動軸心回りに該プーリ本体を揺動可能に支持する支持部材と、
上記プーリ本体と支持部材との間に介装され、該プーリ本体の揺動に伴って支持部材およびプーリ本体のうちの少なくとも一方との間に摺動摩擦を発生する樹脂部品とを備えた自動調心プーリであって、
上記樹脂部品の動摩擦係数μが、0.15≦μ≦0.40であることを特徴とする自動調心プーリ。
【請求項2】
樹脂部品のベルト幅方向寸法が、該樹脂部品のベルト走行方向寸法以上であることを特徴とする請求項1に記載の自動調心プーリ。
【請求項3】
プーリ本体に加わる軸荷重の略全部が樹脂部品を介して支持部材に支承されるように設けられ、
上記樹脂部品は、プーリ本体上においてベルト幅方向における摩擦ベルトのベルト幅方向中心の変動するベルト変動領域の全体に亘って配置されていることを特徴とする請求項1に記載の自動調心プーリ。
【請求項4】
樹脂部品の室温での曲げ弾性率Eが、E≧2.5GPaであることを特徴とする請求項3に記載の自動調心プーリ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】

【図7】

【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2011−236943(P2011−236943A)
【公開日】平成23年11月24日(2011.11.24)
【国際特許分類】
【出願番号】特願2010−107289(P2010−107289)
【出願日】平成22年5月7日(2010.5.7)
【出願人】(000005061)バンドー化学株式会社 (429)
【Fターム(参考)】
【公開日】平成23年11月24日(2011.11.24)
【国際特許分類】
【出願日】平成22年5月7日(2010.5.7)
【出願人】(000005061)バンドー化学株式会社 (429)
【Fターム(参考)】
[ Back to top ]