
自動調理システム
【課題】クレープ生地の製造を連続してなすこともできる自動調理システムを提供する。
【解決手段】鍋1を回転自在に保持するアームAを間歇回転駆動する間歇回転駆動機構10と、間歇回転駆動機構10の間歇回転駆動に連動して鍋1を反転させるとともに反転させられた鍋を元に戻す鍋姿勢変更機構20と、間歇回転駆動機構10の間歇回転駆動に連動して鍋1を通常の姿勢と反転姿勢とに維持する鍋姿勢維持機構30と、間歇回転駆動機構10の間歇回転駆動に連動して鍋蓋を開閉する鍋蓋開閉機構40と、鍋1を予熱する鍋予熱機構50と、鍋を加熱して調理する鍋加熱機構60とを備えてなる自動調理システムである。
【解決手段】鍋1を回転自在に保持するアームAを間歇回転駆動する間歇回転駆動機構10と、間歇回転駆動機構10の間歇回転駆動に連動して鍋1を反転させるとともに反転させられた鍋を元に戻す鍋姿勢変更機構20と、間歇回転駆動機構10の間歇回転駆動に連動して鍋1を通常の姿勢と反転姿勢とに維持する鍋姿勢維持機構30と、間歇回転駆動機構10の間歇回転駆動に連動して鍋蓋を開閉する鍋蓋開閉機構40と、鍋1を予熱する鍋予熱機構50と、鍋を加熱して調理する鍋加熱機構60とを備えてなる自動調理システムである。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は自動調理システムに関する。さらに詳しくは、複数の鍋を回転させながら自動的に調理をなす自動調理システムに関する。
【背景技術】
【0002】
クレープ菓子は、通常、小麦粉、牛乳や卵などを含むクレープ生地用材料を、鉄板などで円くかつ平たく焼いてクレープ生地とした後、生クリームなどの具材を挟み込んで折り畳むことにより形成される。
【0003】
しかるに、クレープ生地の焼成作業は、熟練した作業員によりなす必要があるため、一度に多くのクレープ生地を焼成することが困難である。
【0004】
かかるクレープ生地の焼成作業における問題を解決すべく、特許文献1には一度に多数のクレープ生地の焼成がなし得るクレープ生地製造装置が提案されている。
【0005】
しかしながら、特許文献1の提案にかかるクレープ生地製造装置は、バッチ処理であるため、連続してクレープ生地を焼成できないという問題がある。
【0006】
なお、連続的な加熱調理装置における鍋の循環搬送装置については、特許文献2に提案がなされている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2008−228659号公報
【特許文献2】特開平7−39458号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
本発明はかかる従来技術の課題に鑑みなされたものであって、クレープ生地の製造を連続してなすこともできる自動調理システムを提供することを目的としている。
【課題を解決するための手段】
【0009】
本発明の自動調理システムの第1形態は、鍋を回転自在に保持するアームを間歇回転駆動する間歇回転駆動機構と、前記間歇回転駆動機構の間歇回転駆動に連動して鍋を反転させるとともに反転させられた鍋を元に戻す鍋姿勢変更機構と、前記間歇回転駆動機構の間歇回転駆動に連動して鍋を通常の姿勢と反転姿勢とに維持する鍋姿勢維持機構と、前記間歇回転駆動機構の間歇回転駆動に連動して鍋蓋を開閉する鍋蓋開閉機構と、鍋を予熱する鍋予熱機構と、鍋を加熱して調理する鍋加熱機構と、制御装置とを備え、前記制御装置が、前記間歇回転駆動機構の間歇動作を制御することを特徴とする。
【0010】
本発明の自動調理システムの第2形態は、鍋を保持するアームを間歇回転駆動する間歇回転駆動機構と、前記間歇回転駆動機構の間歇回転駆動に連動して鍋を反転させるとともに反転させられた鍋を元に戻す鍋姿勢変更機構と、前記間歇回転駆動機構の間歇回転駆動に連動して鍋を通常の姿勢と反転姿勢とに維持する鍋姿勢維持機構と、前記間歇回転駆動機構の間歇回転駆動に連動して鍋蓋を開閉する鍋蓋開閉機構と、鍋を予熱する鍋予熱機構と、鍋を加熱して調理する鍋加熱機構と、鍋動作機構と、制御装置とを備え、前記アームはアーム本体と、前記アーム本体と水平にピン接合され鍋を保持するアーム分割体とを含み、前記制御装置が、前記間歇回転駆動機構の間歇動作を制御し、前記鍋動作機構による鍋のピッチングとローリングとが組み合わされた動作を制御することを特徴とする。
【0011】
本発明の自動調理システムの第2形態においては、レーザセンサと、鍋動作機構が前記レーザセンサの検出対象である位置決め板とを有し、制御装置が、前記レーザセンサからの前記位置決め板の検出信号に基づいて前記鍋動作機構の停止動作を制御するのが好ましい。
【0012】
本発明の自動調理システムにおいては、間歇回転駆動機構は、間歇回転円板と、前記間歇回転円板を回転駆動する駆動シリンダーと、前記間歇回転円板の回転を規制する回転規制シリンダーとを含むものとされてなるのが好ましい。
【0013】
また、本発明の自動調理システムにおいては、鍋姿勢維持機構は、水平姿勢維持範囲に配設された水平姿勢維持レールと、前記レール上を走行するアームに装着された水平姿勢制御補助部材とを含むものとされてなるのも好ましい。
【0014】
また、本発明の自動調理システムにおいては、鍋姿勢変更機構は、姿勢変更範囲に配設された姿勢変更レールと、前記レール上を走行するアームに装着された姿勢変更制御補助部材とを含むものとされてなるのも好ましい。
【0015】
また、本発明の自動調理システムにおいては、鍋蓋開閉機構は、鍋蓋支持機構と、鍋蓋の開閉動作範囲に配設された開閉制御板とを含み、前記鍋蓋支持機構は、基盤側部材と鍋蓋側部材とが水平にピン接合されてなるリンク機構とされ、前記鍋蓋側部材は、前記開閉制御板と当接して鍋蓋の開閉を制御するローラーを有するのも好ましい。
【0016】
また、発明の自動調理システムの第2形態においては、鍋動作機構は、鍋底に当接して鍋を動作させる鍋動作体と、前記鍋動作体を回転させる回転機構と、前記鍋動作体の上下動の軌道を形成する軌道形成体と、前記軌道形成体を昇降させる昇降機構とを含み、前記鍋動作体は、同一円周上に十字状に配設された鍋支持部材を含み、前記鍋支持部材は、長さが最長の長尺片と、長さが最短の短尺片と、前記長尺片と前記短尺片との中間の長さとされた二本の中間片とを含み、前記長尺、中間片および片短尺片の各頂点の位置は、鍋の中の材料がほどよく流れる傾斜となるようにされてなるのも好ましい。
【発明の効果】
【0017】
本発明は前記の如く構成されているので、鍋に材料を投入するだけで自動的に加熱調理がなされるという優れた効果を奏する。
【図面の簡単な説明】
【0018】
【図1】本発明の実施形態1に係る自動調理システムのブロック図である。
【図2】同実施形態に係る自動調理システムの概略平面図である。
【図3】同概略正面図である。
【図4】アームの正面図である。
【図5】アーム本体と鍋に設けられた接続部材との接続部の分解図である。
【図6】水平姿勢維持レールおよび姿勢変更レールの展開図である。
【図7】鍋蓋開閉機構の正面図である。
【図8】同機構による鍋蓋の開閉動作の説明図である。
【図9】間歇回転駆動機構の正面図である。
【図10】同平面図である。
【図11】本発明の実施形態2に係る自動調理システムのブロック図である。
【図12】同実施形態の要部正面図である。
【図13】同側面図である。
【図14】同実施形態のアームの正面図である。
【図15】本発明の実施形態3における図6相当図である。
【発明を実施するための形態】
【0019】
以下、添付図面を参照しながら本発明を実施形態に基づいて説明するが、本発明はかかる実施形態のみに限定されるものではない。
【0020】
実施形態1
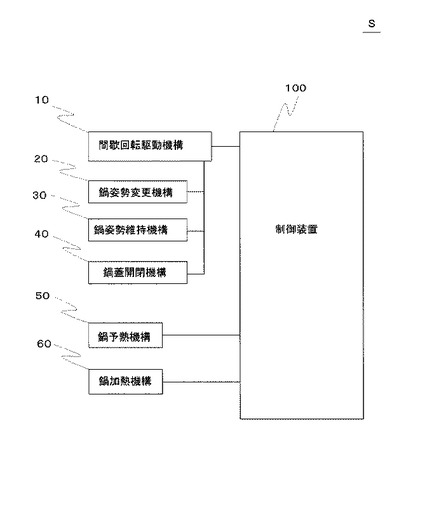
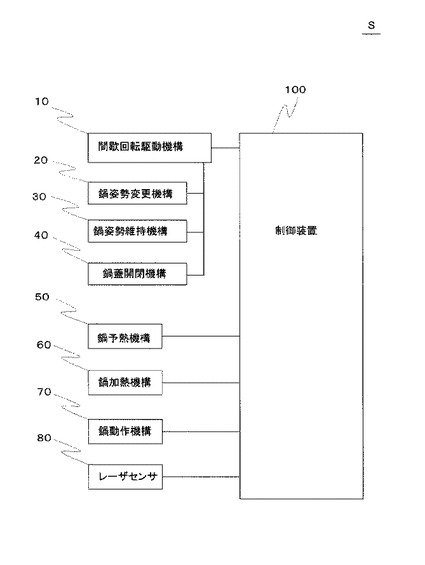
図1に、本発明の実施形態1に係る自動調理システム(以下、単にシステムという)Sをブロック図で示す。
【0021】
システムSは、図1に示すように、鍋1を回転自在に保持するアームAを間歇回転駆動する間歇回転駆動機構10と、間歇回転駆動機構10の間歇回転駆動に連動して鍋1を反転させるとともに間歇回転駆動機構10の間歇回転駆動に連動して反転させられた鍋1を元に戻す鍋姿勢変更機構20と、間歇回転駆動機構10の間歇回転駆動に連動して鍋1を水平な通常姿勢に維持するとともに間歇回転駆動機構10の間歇回転駆動に連動して鍋1を反転姿勢に維持する鍋姿勢維持機構30と、間歇回転駆動機構10の間歇回転駆動に連動して鍋蓋2を開とするとともに間歇回転駆動機構10の間歇回転駆動に連動して鍋蓋2を閉とする鍋蓋開閉機構40と、鍋1を予熱する鍋予熱機構50と、鍋1を加熱して調理する鍋加熱機構60と、制御装置100と、を主要構成要素として備えてなるものとされる。
【0022】
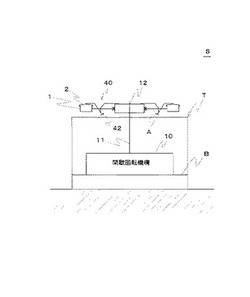
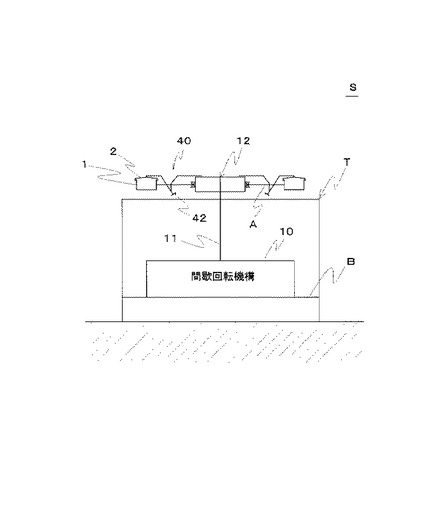
図2および図3に、前記構成とされたシステムSを概略図で示す。
【0023】
システムSは、より具体的には、ベースBに配設された間歇回転駆動機構10と、間歇回転駆動機構10から先端部をテーブルTから突出させて垂直に配設された間歇回転駆動軸11と、間歇回転駆動軸11が中心に嵌合された基盤12と、基盤12から放射状に回転自在に配設された先端に鍋1を有する所要数(図示例では8本)のアームAと、を主要部として備えてなるものとされる。
【0024】
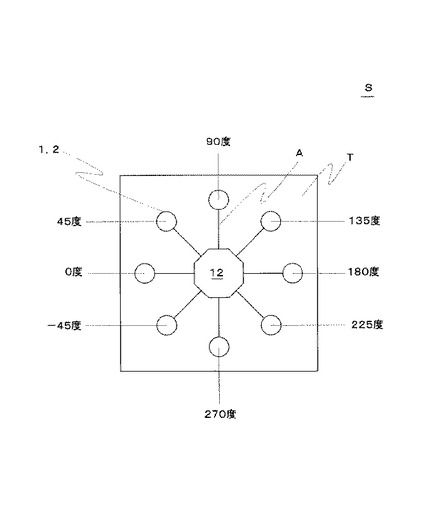
間歇回転駆動機構10は、基盤12を間歇的に時計方向周りに所定角度(図示例では45度)ごと回転させるものとされる。各回転位置は次のように設定されている。なお、以下の説明においては、材料が鍋1に投入される位置を0度として説明する。
【0025】
−45度の位置 予熱位置
0度の位置 材料投入位置
+45度の位置 加熱位置
+90度の位置 加熱位置
+125度の位置 加熱位置
+180度の位置 加熱位置
+270度の位置 調理品投下位置(鍋反転位置)
【0026】
予熱位置には鍋予熱機構50、例えばガスコンロ、加熱位置には鍋加熱機構60、例えばガスコンロが配設され、および調理品投下位置には受け具、例えば受け皿が配設される。
【0027】
また、各回転範囲において以下の動作がなされる。
【0028】
0度〜+45度 蓋閉動作
+45度〜+180度 蓋閉維持
+180度〜+0度 蓋開動作
+225度〜+270度 鍋反転動作
+270度〜+315度 鍋正転動作
−45度〜+225度 鍋通常姿勢維持
【0029】
蓋閉動作範囲では鍋蓋開閉機構40により鍋蓋2が閉じられるようにされ、蓋開動作範囲では鍋蓋開閉機構40により鍋蓋2が開くようにされ、鍋反転動作範囲では鍋姿勢変更機構20により鍋1が反転させられるようにされ、鍋正転動作範囲では鍋姿勢変更機構20により鍋1が正転されるようにされ、鍋通常姿勢維持範囲では鍋姿勢維持機構30により鍋1が水平の通常姿勢に維持される。
【0030】
以下、基盤12、アームAおよび各機構の構成を詳細に説明する。
【0031】
基盤12は、図示例においては8角筒状体とされ、その各側面にアームA基部がセットされる(図2および図3参照)。
【0032】
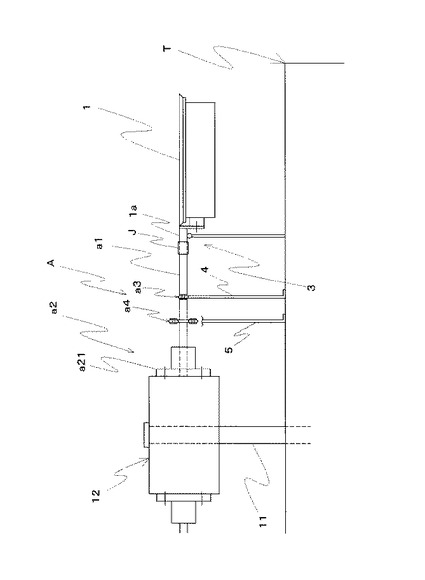
図4にアームAを示す。
【0033】
アームAは、図4に示すように、円柱状のアーム本体a1と、アーム本体a1基部を回転自在に保持してアームAを基盤12側面にセットさせるセット部材a2とを含むものとされる。また、アームAの撓みを防止するため、アームAの鍋保持近傍に、撓み防止部材3がリング状に配設されている。撓み防止部材3は、アームAとの接触摩擦を低減し、アームAのスムースな回転を可能とするため、摩擦抵抗の少ない部材、例えばテフロン(登録商標)による被膜がなされている。
【0034】
このように、アームAが回転自在に保持されているので、アームAは鍋1を回転自在に保持することができる。
【0035】
セット部材a2は、スカート付ボス状体とされ、ボス内部には、図示はされていないが、アーム本体a1を回転自在とするためのベアリングが装着されている。また、スカート部a21には、セット部材a2を基盤12側面にボルト留めするためのボルト孔が所要数形成されている。
【0036】
アーム本体a1の先端には、鍋1に設けられた接続部材1aとの接続部Jが形成され、アーム本体a1の中間部には鍋1を正常姿勢および反転姿勢に制御する水平姿勢制御補助部材a3と、鍋1の反転動作および正転動作を制御する姿勢変更制御補助部材a4とが形成されている。
【0037】
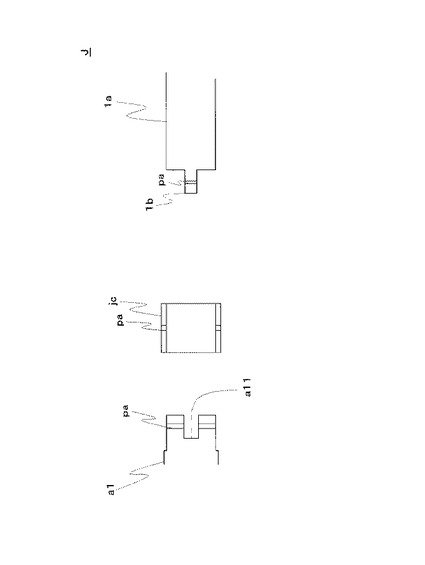
接続部Jは、図5に示すように、アーム本体a1先端部に形成された溝状部a11と、溝状部a11に嵌合される凸片部1bと、嵌合部をカバーするカラーjcと、凸片部1bが溝状部からの抜けを防止する抜け防止ピン(図示省略)とを含むものとされる。そのため、溝状部a11、凸片部1bおよびカラーjcには、ピン用の透孔paが形成されている。なお、カラーjcは抜け防止ピンを抜けばアーム本体a1側にスライド可能とされ、鍋1の交換がなし得るようにされている。
【0038】
水平姿勢制御補助部材a3の両端にはコマが装着され、基盤12の外周に水平姿勢制御補助部材a3に対応させて配設され鍋1の水平な姿勢維持を維持する、大円弧状とされた水平姿勢維持レール4上を走行できるようにされている。コマのスパンは、円弧状とされた水平姿勢維持レール4が直線として扱えるような距離とされている。
【0039】
前記説明から、水平姿勢制御補助部材a3と水平姿勢維持レール4とにより鍋姿勢維持機構30が構成されるのが理解される。
【0040】
姿勢変更制御補助部材a4の両端にはコマが装着され、基盤12の外周に姿勢変更制御補助部材a4に対応させて配設され鍋1の反転動作および正転動作を制御する、小円弧状とされた姿勢変更レール5上を走行できるようにされている。コマのスパンは、円弧状とされた姿勢変更レール5が直線として扱えるような距離とされている。
【0041】
前記説明から、姿勢変更制御補助部材a4と姿勢変更レール5とにより鍋姿勢変更機構20が構成されるのが理解される。
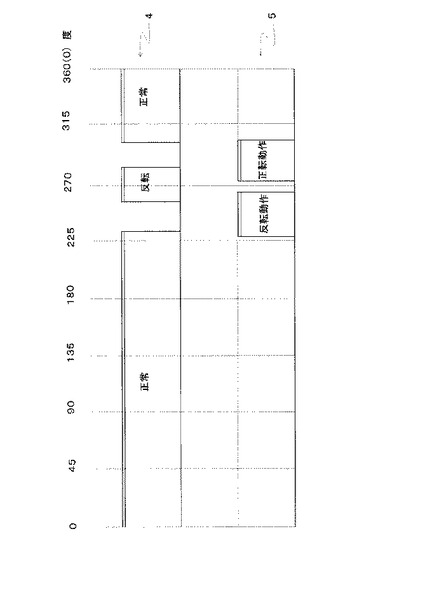
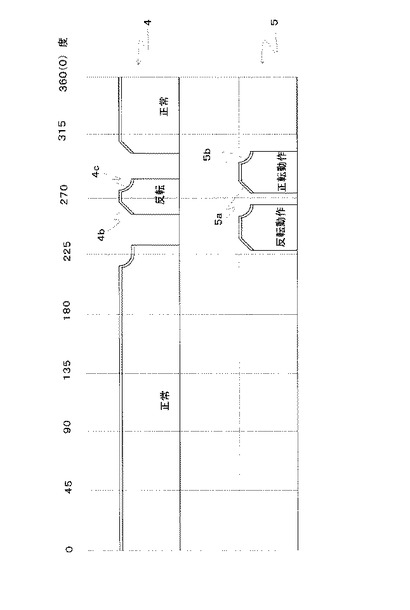
図6に、水平姿勢維持レール4および姿勢変更レール5を展開図で示す。
【0042】
ここで、図6を参照しながら、鍋1の動作について説明する。
【0043】
水平姿勢制御補助部材a3が水平姿勢維持レール4上の正常な水平姿勢維持範囲を走行している間は、鍋1は正常な水平姿勢に維持され、また水平姿勢維持レール4の反転姿勢維持範囲を走行している間は、鍋1は反転した姿勢に維持される。図中の二重線は走行箇所を示す。一方、姿勢変更制御補助部材a4が反転動作範囲を走行している間は、鍋1は反動動作を行い、また正転動作範囲を走行している間は、鍋1は正転動作を行う。図中の二重線は走行箇所を示す。
【0044】
図7に、鍋蓋開閉機構40を示す。
【0045】
鍋蓋開閉機構40は、鍋蓋支機構41と、間歇回転機構10による鍋1の回転に連動して鍋蓋2の開閉を制御する開閉制御板42とを含むものとされる。
【0046】
鍋蓋支機構41は、基盤側部材44と、鍋蓋側部材46とをピン接合してなるリンク機構とされている。
【0047】
基盤側部材44は、所定長さの直線部44aと、直線部44aの先端から所定角度、例えば45度下り傾斜とさせた所定長さの第1傾斜部44bと、第1傾斜部44bの先端から所定角度、例えば45度下り傾斜とさせた所定長さの第2傾斜部44cとを含むものとされる。直線部44aおよび第1傾斜部44bの長さは、第2傾斜部44cがアームAの水平姿勢制御補助部材a3の外側に位置するよう調整されている。また、第2傾斜部44cの下端は、アームAの下方所定位置となるよう第2傾斜部44cの長さが調整されている。
【0048】
基盤側部材44の形状は、直線部44aは角パイプ状とされ、第1傾斜部44bおよび第2傾斜部44cは、直線部44aの角パイプから上面および底面が除去された両側面からなる平行板とされる。第1傾斜部44bおよび第2傾斜部44cを両側面からなる平行板とするのは、平行板の間に鍋1を保持しているアームAを通すため、および鍋蓋側部材46を挟み込むためである。
【0049】
鍋蓋側部材46は、所定長さの直線部46aと、直線部46aの先端から所定角度、例えば45度下り傾斜とさせた所定長さの傾斜部46bとを含むものとされる。直線部46aの先端には、鍋蓋2を吊り上げた際に直線部46aと鍋蓋2とが接触して音が発生するのを防止するため、消音部材47が配設されている。また、鍋蓋側部材46の傾斜部46bの下端には鍋蓋2の開閉を助勢するローラー48が装着される。
【0050】
鍋蓋側部材46の形状は、直線部46aは逆溝型状とされ、傾斜部46bはアームAの上方までは逆溝型状とされ、それより下方の部分は上面が除去された両側面からなる平行板とされる。下方の部分は両側面からなる平行板とするのは、平行板の間に鍋1を保持しているアームAを通すためである。また、平行板の間隔は、基盤側部材44の平行板の間に挟み込まれるよう調整されている。
【0051】
基盤側部材44の直線部44aの基端部は基盤12の上面に固定され、第2傾斜部44cの下端は鍋蓋側部材46の傾斜部46bの適宜位置と水平にピン接合される。一方、鍋蓋側部材46の直線部46aの基端は鍋蓋2の接合部2aと水平にピン接合される。
【0052】
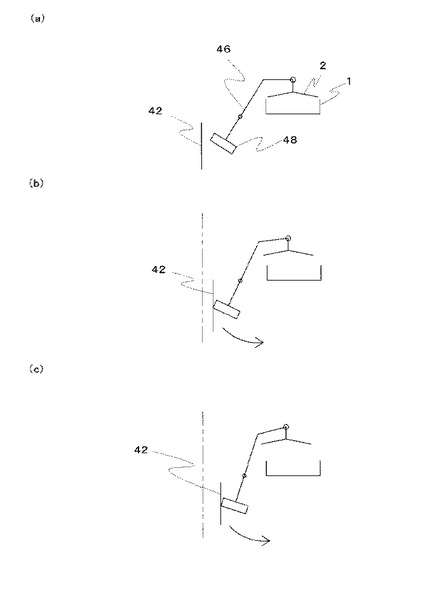
次に、図8を参照しなから、かかる構成とされた鍋蓋開閉機構40による鍋蓋2の開閉について説明する。
【0053】
開閉制御板42と鍋1との距離が遠く離れている間は、ローラー48は開閉制御板42とは接触しないので、鍋蓋2は閉の状態とされる(図8(a)参照)。
【0054】
開閉制御板42と鍋1との距離が接近すると、ローラー48は開閉制御板42と接触してローラー48が鍋1側に押され、鍋蓋側部材44はピン接合点を支点として回転し、それにより鍋蓋2が開き始める(図8(b)参照)。
【0055】
開閉制御板42と鍋1との距離がより接近するとローラー48が開閉制御板42に押される量が多くなり、それにより鍋蓋2の開きが大きくなる(図8(c)参照)。
【0056】
開閉制御板42と鍋1との距離が遠くなると、ローラー48が初期位置に戻りはじめ、それにより鍋蓋2の開きが小さくなり鍋蓋2が閉まり始める。
【0057】
開閉制御板42と鍋1との距離がさらに遠くなると、ローラー48は開閉制御板42には接触しなくなって初期位置に復帰し、それにより鍋蓋2が閉まる。
【0058】
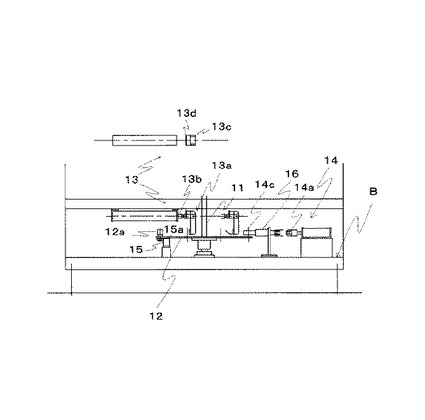
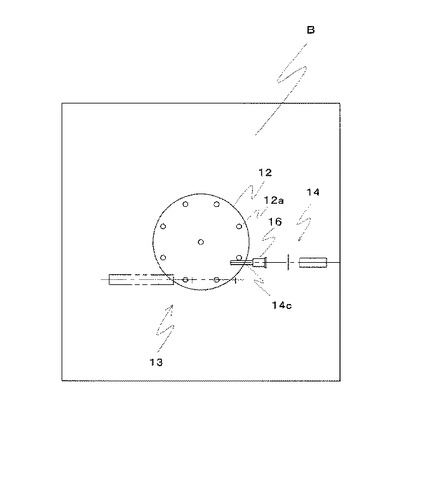
図9および図10に、間歇回転駆動機構10を示す。
【0059】
間歇回転駆動機構10は、図9および図10に示すように、間歇回転円板12と、間歇回転円板12を回転駆動する駆動シリンダー13と、間歇回転円板11の回転を規制する回転規制シリンダー14とを含むものとされる。間歇回転円板12の中心には前述した間歇回転駆動軸11が配設されている。
【0060】
間歇回転円板12は、図10に示すように、駆動シリンダー13の駆動部材13aと係止されるピン12aが外周部に所定間隔で配設されている。図示例では、8本のピンが45度間隔で配設されている。また、間歇回転円板12は、図9に示すように、撓み防止部材15により裏面が受けられて撓みが防止されている。撓み防止部材15は、例えば180度間隔で3個が設けられている。また、撓み防止部材15の先端には、明瞭には図示はされていないが、回転自在なボール15aが埋め込まれ、間歇回転円板12の回転に支障のないようにされている。
【0061】
駆動シリンダー13は、エアシリンダーや電動シリンダーとされ、ロッド13bの先端には、前述した駆動部材13aが配設されている。駆動部材13aは、図9に示すように、ピン12aと係止するU字状とされた係止部材13cをピン接合にて有している。係止部材13cは、ロッドとのなす角が90度までは回動自在とされているが、ストッパー13dにより90度より大きな角度とならないようにされている。
【0062】
駆動シリンダー13がかかる構成とされていることにより、係止部材13cをピン12aに係止させてロッド13bを後退させると間歇回転円板12が回転する。ロッド13bのストロークは、間歇回転円板12が45度回転するよう調整されている。また、前記動作がなし得るよう、駆動シリンダー13はピン12aを望ませて配設されている。
しかして、駆動シリンダー13はロッド13bの進退を繰り返すごとにより、間歇回転円板12を45度ずつ回転させることができる。
【0063】
回転規制シリンダー14は、ロッド14aに接合させて設けられた回転規制部材14cを駆動シリンダー13のロッド13bの動作範囲外のピン12aの回転方向前方に位置させて間歇回転円板12の無用の回転を防止するものとされる。すなわち、駆動シリンダー13により間歇回転円板12が回転されている間は、回転規制シリンダー14のロッド14aは退避位置とされた回転規制部材14cとピン12aとが係止しないようにされる一方、駆動シリンダー13か待機中および駆動位置に復帰中においては回転規制シリンダー14のロッド14aが進出して回転規制部材14cがピン12aとが係止して間歇回転円板12の回転を規制するものとされる。図中、符号16はピン12aと係止する回転規制部材14cの進退をガイドするガイド部材を示す。
【0064】
制御装置100は、間歇回転機構10、鍋予熱機構50および鍋加熱機構60を制御するようプログラムされたコンピュータとされ、例えばテーブルに付設される。
【0065】
間歇回転機構10の制御は、具体的には、駆動シリンダー13および回転規制シリンダー14が前述した動作をなすようになされる。
【0066】
また、鍋予熱機構50および鍋加熱機構60の制御は、具体的には、鍋予熱機構50および鍋加熱機構60の着火および消火ならびに火力の調節をなすものとされる。なお、鍋予熱機構50および鍋加熱機構60の着火および消火ならびに火力の調節はマニアル操作によりなされるようにされてもよい。
【0067】
しかして、本実施形態の自動調理システムSによれば、予熱され鍋蓋2が開いた鍋1に食材が投入されると、回転動作に連動して鍋蓋2が閉められて鍋1が逐次加熱されて食材が自動的に調理され、調理が終了すると回転動作に連動して鍋蓋2が開くとともに、鍋1が反転させられて調理品が受け皿に投下される。調理品が投下された鍋1は鍋蓋2が開いた状態で予熱位置まで回転される。以下、同様にして連続的に調理がなされる。
【0068】
実施形態2
本発明の実施形態2の自動調理システム(以下、単にシステムという)Sを図11にブロック図で示す。実施形態2は、実施形態1を改変してなるものとされ、鍋1をピッチングとローリングを組み合わせた動作がなし得るようにされてなるものとされる。鍋1にかかる動作をなさせることにより、クレープ生地用材料を鍋1の底に均一に延ばすことができる。
【0069】
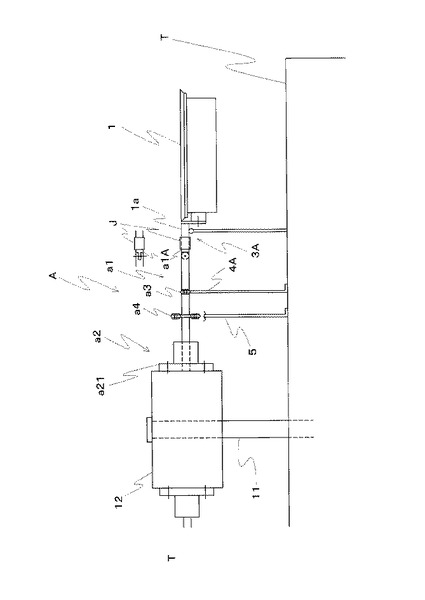
具体的には、システムSは、図11に示すように、鍋動作機構70およびレーザセンサ80を付設してなるものとされとともに、撓み防止部材3および水平姿勢維持レール4を0度位置近傍において分割体3A,4Aを含むものとされる(図14参照)。
【0070】
撓み防止部材分割体3Aと水平姿勢維持レール分割体4Aは、テーブルTの下で接続部材7により接続されている。接続部材7の中央適宜位置には基端がテーブルTに固着されたスライド軸8にスライド自在に嵌合されたスカート付ボス状のスライド部材8aが嵌合されている。
【0071】
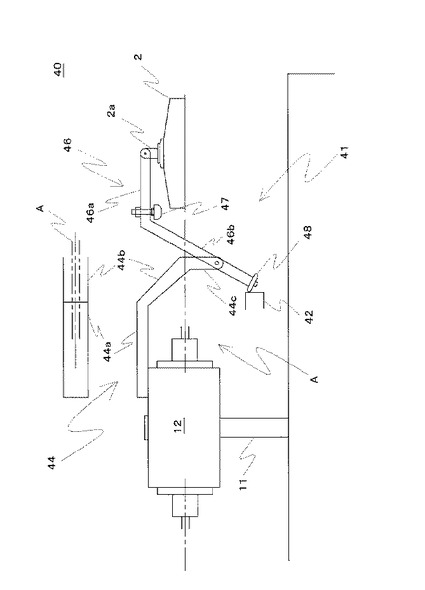
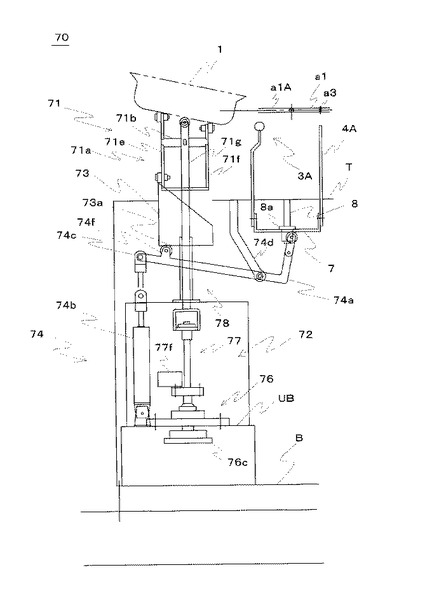
鍋動作機構70は、図12および図13に示すように、鍋動作体71と、鍋動作体71を回転させる回転機構72と、鍋動作体71の上下動の軌道を形成する軌道形成体73と、軌道形成体73を昇降させる昇降機構74とを含むものとされる。ここで、昇降機構74は、0度位置近傍の撓み防止部材分割体3Aおよび水平姿勢維持レール分割体4Aの昇降もなすようにされている。
【0072】
鍋動作体71は、同一円周上に十字状に配設された鍋支持部材71aと、鍋支持部材71aの倒れを防止する十字状に形成された倒れ防止部材71bと、鍋支持部材71aがセットされる基板71cとを含むものとされ、その中心が水平姿勢された鍋1の中心に位置するようにして鍋1の下方に配設される。
【0073】
鍋支持部材71aは、長さが最長の長尺片71eと、長さか最短の短尺片71fと、短尺片71fと長尺片71eとの中間の長さとされた中尺片71gとを含むものとされる。短尺片71f、中尺片71gおよび長尺片71eの頂点の位置は、クレープ生地用材料が鍋1の底でほどよく流れる傾斜となるよう調整されている。なお、各片71e,71f,71gの具体的な長さは試験に基づいて設定される。
【0074】
短尺片71f、中尺片71gおよび長尺片71eの頂部には、鍋1の円滑な動作を担保するためにコマが配設されている。また、長尺片71eの基端部近傍には軌道形成体73の頂面(軌道形成面)を走行するコマが配設されている。
倒れ防止部材71bは、短尺片71f、中尺片71gおよび長尺片71eの中間部より上の位置に水平に配設されている。
【0075】
基板71cは円形状とされ、その中心に後述する回転機構72の回転軸の先端が嵌合されている。
【0076】
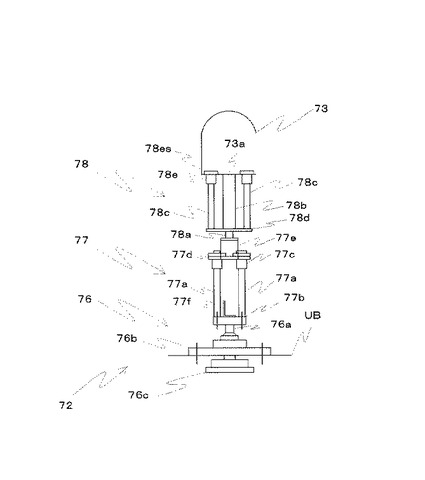
回転機構72は、下部回転体76と、中間部回転体77と、上部回転体78とを含むものとされる。
【0077】
下部回転体76は、回転軸76aと、上部ベースUBにセットされて回転軸76aの中間部を回転自在に保持するスカート付ボス状の保持部材76bと、回転軸76aの基端にセットされたスプロケット76cとを含むものとされる。下部回転体76は、スプロケット76cがモータ(図示省略)によりチェーン駆動されて回転軸76aが回転するものとされる。
【0078】
中間部回転体77は、平行に垂設された一対の昇降ガイド軸77aと、ガイド軸77aの基端がセットされる下部保持部材77bと、ガイド軸77aにスライド自在に装着されたボス状のスライド部材77cと、スライド部材77cを保持する上部保持部材77dと、上部保持部材77dを跨ぐように配設された門型部材77eと、位置決め板77fとを含むものとされる。門型部材77eおよび位置決め板77fは、例えば、鋼板を折り曲げ成形して作製される。
【0079】
位置決め板77fは、レーザセンサ80による検出ターゲットとされる。
【0080】
下部保持部材77bの中心に下部回転体76の回転軸76aの上端が嵌合され、門型部材77eの上面中心に上部回転体78の回転軸78aの基端が嵌合される。
【0081】
上部回転体78は、前述した回転軸78aと、回転軸78aに外嵌されて回転軸78aの昇降をガイドするガイドパイプ78bと、回転軸78aを対称軸として対称に配設された一対の補強部材78cと、ガイドパイプ78bおよびガイド軸78cの各基端がセットされる下部保持部材78dと、ガイド軸78cにスライド自在に装着されたスカート付ボス状のスライド部材78eとを含むものとされる。
【0082】
回転軸78aの下端は、前述したように門型部材77eの上面中心に嵌合され、一方上端は、前述したように鍋動作体71の基板71c中心に嵌合される。
【0083】
軌道形成体73は、上端が斜に切った有底円筒体とされ、前述したように上端面が軌道形成面とされる。軌道形成体73は、背の低い方を基盤12側に向けて配設されている。
【0084】
底面73a中心には、上部回転体78のガイドパイプ78bの上端が嵌合され、ガイドパイプ78bの嵌合部を挟んでスライド部材78eがスカート部78esを底面73aに載置した状態で嵌合されている。
【0085】
昇降機構74は、軌道形成体73を昇降させるL字状に形成された昇降助勢部材74aと、昇降助勢部材74aの軌道形成体73側の端部にロッド74cの先端が水平にピン接合された昇降シリンダー74bと、昇降助勢部材74aの長辺の適宜位置に水平にピン接合されて昇降助勢部材74aのシーソー運動を助勢する支持部材74dとを含むものとされ、回転機構72に隣接させられて基盤12の反対側で上部ベースUBに配設される。
【0086】
昇降シリンダー74bは、電動シリンダーやエアシリンダーとされる。
【0087】
昇降助勢部材74aの長辺の軌道形成体73の下方位置には、軌道形成体73の底面73aとの当接部74fが形成されている。また、短辺の先端は接続部材7に当接されている。当接部74fおよび短辺の先端にはコマが装着されていて、円滑な動作が担保されている。
【0088】
昇降助勢部材74aのサイズおよびシーソー範囲は、鍋支持部材71aの長尺片71eが所定高さ位置で鍋1の底に当接するとともに、撓み防止部材分割体3Aおよび水平姿勢維持レール分割体4Aが所定の昇降動作がなし得るよう調整されている。
【0089】
アームAは、図14に示すように、アーム本体a1が分割体a1Aを含むものとされる。アーム本体a1と分割体a1Aとは水平にピン接合されて鍋1がピッチングできるようにされている。実施形態1で述べたように、アーム本体a1は回転自在とされているので、鍋1はピッチングとローリングとを組み合わせた動作をなすことが可能となる。
【0090】
次に、かかる構成とされている鍋動作機構70による鍋1の動作について説明する。なお、以下の動作は制御装置100の制御の下に自動的になされる。
【0091】
動作1:間歇回転駆動機構10により鍋1が0度の位置に到達すると、昇降シリンダー74bが駆動されてロッド74c先端が上昇する。
【0092】
動作2:前記動作により昇降助勢部材74aの長辺の軌道形成体73側の端部が上昇する一方、短辺の上端が下降する。
【0093】
動作3:前記動作により軌道形成体73が上昇する一方、撓み防止部材分割体3Aおよび水平姿勢維持レール分割体4Aが下降する。
【0094】
動作4:前記動作に応答して鍋支持部材71aが回転される。この回転中における各片71e,71f,71gの頂点の軌跡は軌道形成体73の軌道形成面により形成されるので、鍋1はローリングとピッチングが組み合わさった動作を行う。
【0095】
動作5:所定期間経過すると、鍋支持部材71aの回転が停止される。ここで、鍋支持部材71aの回転停止は、レーザセンサ80が、位置決め板77fの検出面を検出してから一定期間経過後になされるようにされているので、鍋支持部材71aは常に一定の位置で停止する。
【0096】
動作6:前記動作に応答して昇降シリンダー74bが動作されてロッド74c先端が下降する。
【0097】
動作7:前記動作により昇降助勢部材74aの長辺の軌道形成体73側の端部が下降する一方、短辺の上端が上昇する。
【0098】
動作8:前記動作により軌道形成体73、撓み防止部材分割体3Aおよび水平姿勢維持レール分割体4Aが初期位置に復帰する。
【0099】
このように、本実施形態によれば、鍋1が自動的にローリングとピッチングとが組み合わされた動作を行うので、人手をかけることなくクレープ生地用材料を均一に鍋1の底に延ばすことができる。
【0100】
実施形態3
本発明の実施形態3の要部を図15に示す。実施形態3は実施形態1を改変してなるものであって、図15に示すように、水平姿勢維持レール4のアームAの進入側に面取り状に形成された進入部4bを設け、一方アームAの離脱側に円弧状に形成された離脱誘導路4cを設けてなるものとされる。同様に、姿勢変更レール5のアームAの進入側に面取り状に形成された進入部5aを設け、一方アームAの離脱側に円弧状に形成された離脱誘導路5bを設けてなるものとされる。
【0101】
本実施形態においては、水平姿勢維持レール4および姿勢変更レール5が、前記の如く形成されているので、鍋1の姿勢変更が滑らかになされるという実施形態1に比して優れた効果を奏する。
【0102】
以上、本発明を実施形態に基づいて説明してきたが、本発明はかかる実施形態のみに限定されるものではなく、種々改変が可能である。
【0103】
例えば、本実施形態ではクレープ生地用材料を例に取り説明されているが、本発明の適用はクレープ生地用材料に限定されるものではなく、例えばホットケーキにも適用できる。
【産業上の利用可能性】
【0104】
加熱が必要な調理作業に適用できる。
【符号の説明】
【0105】
1 鍋
1a 接続部材
1b 凸片部
2 鍋蓋
3 撓み防止部材
3A 撓み防止部材分割体
4 水平姿勢維持レール
4A 水平姿勢維持レール分割体
4b 進入部
4c 離脱誘導部
5 姿勢変更レール
5a 進入部
5b 離脱誘導部
7 接続部材
8 スライド軸
10 間歇回転駆動機構
11 間歇回転駆動軸
12 間歇回転円板
13 駆動シリンダー
14 回転規制シリンダー
20 鍋姿勢変更機構
30 鍋姿勢維持機構
40 鍋蓋開閉機構
42 開閉制御板
50 鍋予熱機構
60 鍋加熱機構
70 鍋動作機構
71 鍋動作体
72 回転機構
73 軌道形成体
74 昇降機構
76 下部回転体
77 中間部回転体
77f 位置決め板
78 上部回転体
80 レーザセンサ
100 制御装置
S 自動調理システム
A アーム
a1 アーム本体
a2 セット部材
a3 水平姿勢制御補助部材
a4 姿勢変更制御補助部材
J 接続部
jc カラー
B ベース
UB 上部ベース
T テーブル
【技術分野】
【0001】
本発明は自動調理システムに関する。さらに詳しくは、複数の鍋を回転させながら自動的に調理をなす自動調理システムに関する。
【背景技術】
【0002】
クレープ菓子は、通常、小麦粉、牛乳や卵などを含むクレープ生地用材料を、鉄板などで円くかつ平たく焼いてクレープ生地とした後、生クリームなどの具材を挟み込んで折り畳むことにより形成される。
【0003】
しかるに、クレープ生地の焼成作業は、熟練した作業員によりなす必要があるため、一度に多くのクレープ生地を焼成することが困難である。
【0004】
かかるクレープ生地の焼成作業における問題を解決すべく、特許文献1には一度に多数のクレープ生地の焼成がなし得るクレープ生地製造装置が提案されている。
【0005】
しかしながら、特許文献1の提案にかかるクレープ生地製造装置は、バッチ処理であるため、連続してクレープ生地を焼成できないという問題がある。
【0006】
なお、連続的な加熱調理装置における鍋の循環搬送装置については、特許文献2に提案がなされている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2008−228659号公報
【特許文献2】特開平7−39458号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
本発明はかかる従来技術の課題に鑑みなされたものであって、クレープ生地の製造を連続してなすこともできる自動調理システムを提供することを目的としている。
【課題を解決するための手段】
【0009】
本発明の自動調理システムの第1形態は、鍋を回転自在に保持するアームを間歇回転駆動する間歇回転駆動機構と、前記間歇回転駆動機構の間歇回転駆動に連動して鍋を反転させるとともに反転させられた鍋を元に戻す鍋姿勢変更機構と、前記間歇回転駆動機構の間歇回転駆動に連動して鍋を通常の姿勢と反転姿勢とに維持する鍋姿勢維持機構と、前記間歇回転駆動機構の間歇回転駆動に連動して鍋蓋を開閉する鍋蓋開閉機構と、鍋を予熱する鍋予熱機構と、鍋を加熱して調理する鍋加熱機構と、制御装置とを備え、前記制御装置が、前記間歇回転駆動機構の間歇動作を制御することを特徴とする。
【0010】
本発明の自動調理システムの第2形態は、鍋を保持するアームを間歇回転駆動する間歇回転駆動機構と、前記間歇回転駆動機構の間歇回転駆動に連動して鍋を反転させるとともに反転させられた鍋を元に戻す鍋姿勢変更機構と、前記間歇回転駆動機構の間歇回転駆動に連動して鍋を通常の姿勢と反転姿勢とに維持する鍋姿勢維持機構と、前記間歇回転駆動機構の間歇回転駆動に連動して鍋蓋を開閉する鍋蓋開閉機構と、鍋を予熱する鍋予熱機構と、鍋を加熱して調理する鍋加熱機構と、鍋動作機構と、制御装置とを備え、前記アームはアーム本体と、前記アーム本体と水平にピン接合され鍋を保持するアーム分割体とを含み、前記制御装置が、前記間歇回転駆動機構の間歇動作を制御し、前記鍋動作機構による鍋のピッチングとローリングとが組み合わされた動作を制御することを特徴とする。
【0011】
本発明の自動調理システムの第2形態においては、レーザセンサと、鍋動作機構が前記レーザセンサの検出対象である位置決め板とを有し、制御装置が、前記レーザセンサからの前記位置決め板の検出信号に基づいて前記鍋動作機構の停止動作を制御するのが好ましい。
【0012】
本発明の自動調理システムにおいては、間歇回転駆動機構は、間歇回転円板と、前記間歇回転円板を回転駆動する駆動シリンダーと、前記間歇回転円板の回転を規制する回転規制シリンダーとを含むものとされてなるのが好ましい。
【0013】
また、本発明の自動調理システムにおいては、鍋姿勢維持機構は、水平姿勢維持範囲に配設された水平姿勢維持レールと、前記レール上を走行するアームに装着された水平姿勢制御補助部材とを含むものとされてなるのも好ましい。
【0014】
また、本発明の自動調理システムにおいては、鍋姿勢変更機構は、姿勢変更範囲に配設された姿勢変更レールと、前記レール上を走行するアームに装着された姿勢変更制御補助部材とを含むものとされてなるのも好ましい。
【0015】
また、本発明の自動調理システムにおいては、鍋蓋開閉機構は、鍋蓋支持機構と、鍋蓋の開閉動作範囲に配設された開閉制御板とを含み、前記鍋蓋支持機構は、基盤側部材と鍋蓋側部材とが水平にピン接合されてなるリンク機構とされ、前記鍋蓋側部材は、前記開閉制御板と当接して鍋蓋の開閉を制御するローラーを有するのも好ましい。
【0016】
また、発明の自動調理システムの第2形態においては、鍋動作機構は、鍋底に当接して鍋を動作させる鍋動作体と、前記鍋動作体を回転させる回転機構と、前記鍋動作体の上下動の軌道を形成する軌道形成体と、前記軌道形成体を昇降させる昇降機構とを含み、前記鍋動作体は、同一円周上に十字状に配設された鍋支持部材を含み、前記鍋支持部材は、長さが最長の長尺片と、長さが最短の短尺片と、前記長尺片と前記短尺片との中間の長さとされた二本の中間片とを含み、前記長尺、中間片および片短尺片の各頂点の位置は、鍋の中の材料がほどよく流れる傾斜となるようにされてなるのも好ましい。
【発明の効果】
【0017】
本発明は前記の如く構成されているので、鍋に材料を投入するだけで自動的に加熱調理がなされるという優れた効果を奏する。
【図面の簡単な説明】
【0018】
【図1】本発明の実施形態1に係る自動調理システムのブロック図である。
【図2】同実施形態に係る自動調理システムの概略平面図である。
【図3】同概略正面図である。
【図4】アームの正面図である。
【図5】アーム本体と鍋に設けられた接続部材との接続部の分解図である。
【図6】水平姿勢維持レールおよび姿勢変更レールの展開図である。
【図7】鍋蓋開閉機構の正面図である。
【図8】同機構による鍋蓋の開閉動作の説明図である。
【図9】間歇回転駆動機構の正面図である。
【図10】同平面図である。
【図11】本発明の実施形態2に係る自動調理システムのブロック図である。
【図12】同実施形態の要部正面図である。
【図13】同側面図である。
【図14】同実施形態のアームの正面図である。
【図15】本発明の実施形態3における図6相当図である。
【発明を実施するための形態】
【0019】
以下、添付図面を参照しながら本発明を実施形態に基づいて説明するが、本発明はかかる実施形態のみに限定されるものではない。
【0020】
実施形態1
図1に、本発明の実施形態1に係る自動調理システム(以下、単にシステムという)Sをブロック図で示す。
【0021】
システムSは、図1に示すように、鍋1を回転自在に保持するアームAを間歇回転駆動する間歇回転駆動機構10と、間歇回転駆動機構10の間歇回転駆動に連動して鍋1を反転させるとともに間歇回転駆動機構10の間歇回転駆動に連動して反転させられた鍋1を元に戻す鍋姿勢変更機構20と、間歇回転駆動機構10の間歇回転駆動に連動して鍋1を水平な通常姿勢に維持するとともに間歇回転駆動機構10の間歇回転駆動に連動して鍋1を反転姿勢に維持する鍋姿勢維持機構30と、間歇回転駆動機構10の間歇回転駆動に連動して鍋蓋2を開とするとともに間歇回転駆動機構10の間歇回転駆動に連動して鍋蓋2を閉とする鍋蓋開閉機構40と、鍋1を予熱する鍋予熱機構50と、鍋1を加熱して調理する鍋加熱機構60と、制御装置100と、を主要構成要素として備えてなるものとされる。
【0022】
図2および図3に、前記構成とされたシステムSを概略図で示す。
【0023】
システムSは、より具体的には、ベースBに配設された間歇回転駆動機構10と、間歇回転駆動機構10から先端部をテーブルTから突出させて垂直に配設された間歇回転駆動軸11と、間歇回転駆動軸11が中心に嵌合された基盤12と、基盤12から放射状に回転自在に配設された先端に鍋1を有する所要数(図示例では8本)のアームAと、を主要部として備えてなるものとされる。
【0024】
間歇回転駆動機構10は、基盤12を間歇的に時計方向周りに所定角度(図示例では45度)ごと回転させるものとされる。各回転位置は次のように設定されている。なお、以下の説明においては、材料が鍋1に投入される位置を0度として説明する。
【0025】
−45度の位置 予熱位置
0度の位置 材料投入位置
+45度の位置 加熱位置
+90度の位置 加熱位置
+125度の位置 加熱位置
+180度の位置 加熱位置
+270度の位置 調理品投下位置(鍋反転位置)
【0026】
予熱位置には鍋予熱機構50、例えばガスコンロ、加熱位置には鍋加熱機構60、例えばガスコンロが配設され、および調理品投下位置には受け具、例えば受け皿が配設される。
【0027】
また、各回転範囲において以下の動作がなされる。
【0028】
0度〜+45度 蓋閉動作
+45度〜+180度 蓋閉維持
+180度〜+0度 蓋開動作
+225度〜+270度 鍋反転動作
+270度〜+315度 鍋正転動作
−45度〜+225度 鍋通常姿勢維持
【0029】
蓋閉動作範囲では鍋蓋開閉機構40により鍋蓋2が閉じられるようにされ、蓋開動作範囲では鍋蓋開閉機構40により鍋蓋2が開くようにされ、鍋反転動作範囲では鍋姿勢変更機構20により鍋1が反転させられるようにされ、鍋正転動作範囲では鍋姿勢変更機構20により鍋1が正転されるようにされ、鍋通常姿勢維持範囲では鍋姿勢維持機構30により鍋1が水平の通常姿勢に維持される。
【0030】
以下、基盤12、アームAおよび各機構の構成を詳細に説明する。
【0031】
基盤12は、図示例においては8角筒状体とされ、その各側面にアームA基部がセットされる(図2および図3参照)。
【0032】
図4にアームAを示す。
【0033】
アームAは、図4に示すように、円柱状のアーム本体a1と、アーム本体a1基部を回転自在に保持してアームAを基盤12側面にセットさせるセット部材a2とを含むものとされる。また、アームAの撓みを防止するため、アームAの鍋保持近傍に、撓み防止部材3がリング状に配設されている。撓み防止部材3は、アームAとの接触摩擦を低減し、アームAのスムースな回転を可能とするため、摩擦抵抗の少ない部材、例えばテフロン(登録商標)による被膜がなされている。
【0034】
このように、アームAが回転自在に保持されているので、アームAは鍋1を回転自在に保持することができる。
【0035】
セット部材a2は、スカート付ボス状体とされ、ボス内部には、図示はされていないが、アーム本体a1を回転自在とするためのベアリングが装着されている。また、スカート部a21には、セット部材a2を基盤12側面にボルト留めするためのボルト孔が所要数形成されている。
【0036】
アーム本体a1の先端には、鍋1に設けられた接続部材1aとの接続部Jが形成され、アーム本体a1の中間部には鍋1を正常姿勢および反転姿勢に制御する水平姿勢制御補助部材a3と、鍋1の反転動作および正転動作を制御する姿勢変更制御補助部材a4とが形成されている。
【0037】
接続部Jは、図5に示すように、アーム本体a1先端部に形成された溝状部a11と、溝状部a11に嵌合される凸片部1bと、嵌合部をカバーするカラーjcと、凸片部1bが溝状部からの抜けを防止する抜け防止ピン(図示省略)とを含むものとされる。そのため、溝状部a11、凸片部1bおよびカラーjcには、ピン用の透孔paが形成されている。なお、カラーjcは抜け防止ピンを抜けばアーム本体a1側にスライド可能とされ、鍋1の交換がなし得るようにされている。
【0038】
水平姿勢制御補助部材a3の両端にはコマが装着され、基盤12の外周に水平姿勢制御補助部材a3に対応させて配設され鍋1の水平な姿勢維持を維持する、大円弧状とされた水平姿勢維持レール4上を走行できるようにされている。コマのスパンは、円弧状とされた水平姿勢維持レール4が直線として扱えるような距離とされている。
【0039】
前記説明から、水平姿勢制御補助部材a3と水平姿勢維持レール4とにより鍋姿勢維持機構30が構成されるのが理解される。
【0040】
姿勢変更制御補助部材a4の両端にはコマが装着され、基盤12の外周に姿勢変更制御補助部材a4に対応させて配設され鍋1の反転動作および正転動作を制御する、小円弧状とされた姿勢変更レール5上を走行できるようにされている。コマのスパンは、円弧状とされた姿勢変更レール5が直線として扱えるような距離とされている。
【0041】
前記説明から、姿勢変更制御補助部材a4と姿勢変更レール5とにより鍋姿勢変更機構20が構成されるのが理解される。
図6に、水平姿勢維持レール4および姿勢変更レール5を展開図で示す。
【0042】
ここで、図6を参照しながら、鍋1の動作について説明する。
【0043】
水平姿勢制御補助部材a3が水平姿勢維持レール4上の正常な水平姿勢維持範囲を走行している間は、鍋1は正常な水平姿勢に維持され、また水平姿勢維持レール4の反転姿勢維持範囲を走行している間は、鍋1は反転した姿勢に維持される。図中の二重線は走行箇所を示す。一方、姿勢変更制御補助部材a4が反転動作範囲を走行している間は、鍋1は反動動作を行い、また正転動作範囲を走行している間は、鍋1は正転動作を行う。図中の二重線は走行箇所を示す。
【0044】
図7に、鍋蓋開閉機構40を示す。
【0045】
鍋蓋開閉機構40は、鍋蓋支機構41と、間歇回転機構10による鍋1の回転に連動して鍋蓋2の開閉を制御する開閉制御板42とを含むものとされる。
【0046】
鍋蓋支機構41は、基盤側部材44と、鍋蓋側部材46とをピン接合してなるリンク機構とされている。
【0047】
基盤側部材44は、所定長さの直線部44aと、直線部44aの先端から所定角度、例えば45度下り傾斜とさせた所定長さの第1傾斜部44bと、第1傾斜部44bの先端から所定角度、例えば45度下り傾斜とさせた所定長さの第2傾斜部44cとを含むものとされる。直線部44aおよび第1傾斜部44bの長さは、第2傾斜部44cがアームAの水平姿勢制御補助部材a3の外側に位置するよう調整されている。また、第2傾斜部44cの下端は、アームAの下方所定位置となるよう第2傾斜部44cの長さが調整されている。
【0048】
基盤側部材44の形状は、直線部44aは角パイプ状とされ、第1傾斜部44bおよび第2傾斜部44cは、直線部44aの角パイプから上面および底面が除去された両側面からなる平行板とされる。第1傾斜部44bおよび第2傾斜部44cを両側面からなる平行板とするのは、平行板の間に鍋1を保持しているアームAを通すため、および鍋蓋側部材46を挟み込むためである。
【0049】
鍋蓋側部材46は、所定長さの直線部46aと、直線部46aの先端から所定角度、例えば45度下り傾斜とさせた所定長さの傾斜部46bとを含むものとされる。直線部46aの先端には、鍋蓋2を吊り上げた際に直線部46aと鍋蓋2とが接触して音が発生するのを防止するため、消音部材47が配設されている。また、鍋蓋側部材46の傾斜部46bの下端には鍋蓋2の開閉を助勢するローラー48が装着される。
【0050】
鍋蓋側部材46の形状は、直線部46aは逆溝型状とされ、傾斜部46bはアームAの上方までは逆溝型状とされ、それより下方の部分は上面が除去された両側面からなる平行板とされる。下方の部分は両側面からなる平行板とするのは、平行板の間に鍋1を保持しているアームAを通すためである。また、平行板の間隔は、基盤側部材44の平行板の間に挟み込まれるよう調整されている。
【0051】
基盤側部材44の直線部44aの基端部は基盤12の上面に固定され、第2傾斜部44cの下端は鍋蓋側部材46の傾斜部46bの適宜位置と水平にピン接合される。一方、鍋蓋側部材46の直線部46aの基端は鍋蓋2の接合部2aと水平にピン接合される。
【0052】
次に、図8を参照しなから、かかる構成とされた鍋蓋開閉機構40による鍋蓋2の開閉について説明する。
【0053】
開閉制御板42と鍋1との距離が遠く離れている間は、ローラー48は開閉制御板42とは接触しないので、鍋蓋2は閉の状態とされる(図8(a)参照)。
【0054】
開閉制御板42と鍋1との距離が接近すると、ローラー48は開閉制御板42と接触してローラー48が鍋1側に押され、鍋蓋側部材44はピン接合点を支点として回転し、それにより鍋蓋2が開き始める(図8(b)参照)。
【0055】
開閉制御板42と鍋1との距離がより接近するとローラー48が開閉制御板42に押される量が多くなり、それにより鍋蓋2の開きが大きくなる(図8(c)参照)。
【0056】
開閉制御板42と鍋1との距離が遠くなると、ローラー48が初期位置に戻りはじめ、それにより鍋蓋2の開きが小さくなり鍋蓋2が閉まり始める。
【0057】
開閉制御板42と鍋1との距離がさらに遠くなると、ローラー48は開閉制御板42には接触しなくなって初期位置に復帰し、それにより鍋蓋2が閉まる。
【0058】
図9および図10に、間歇回転駆動機構10を示す。
【0059】
間歇回転駆動機構10は、図9および図10に示すように、間歇回転円板12と、間歇回転円板12を回転駆動する駆動シリンダー13と、間歇回転円板11の回転を規制する回転規制シリンダー14とを含むものとされる。間歇回転円板12の中心には前述した間歇回転駆動軸11が配設されている。
【0060】
間歇回転円板12は、図10に示すように、駆動シリンダー13の駆動部材13aと係止されるピン12aが外周部に所定間隔で配設されている。図示例では、8本のピンが45度間隔で配設されている。また、間歇回転円板12は、図9に示すように、撓み防止部材15により裏面が受けられて撓みが防止されている。撓み防止部材15は、例えば180度間隔で3個が設けられている。また、撓み防止部材15の先端には、明瞭には図示はされていないが、回転自在なボール15aが埋め込まれ、間歇回転円板12の回転に支障のないようにされている。
【0061】
駆動シリンダー13は、エアシリンダーや電動シリンダーとされ、ロッド13bの先端には、前述した駆動部材13aが配設されている。駆動部材13aは、図9に示すように、ピン12aと係止するU字状とされた係止部材13cをピン接合にて有している。係止部材13cは、ロッドとのなす角が90度までは回動自在とされているが、ストッパー13dにより90度より大きな角度とならないようにされている。
【0062】
駆動シリンダー13がかかる構成とされていることにより、係止部材13cをピン12aに係止させてロッド13bを後退させると間歇回転円板12が回転する。ロッド13bのストロークは、間歇回転円板12が45度回転するよう調整されている。また、前記動作がなし得るよう、駆動シリンダー13はピン12aを望ませて配設されている。
しかして、駆動シリンダー13はロッド13bの進退を繰り返すごとにより、間歇回転円板12を45度ずつ回転させることができる。
【0063】
回転規制シリンダー14は、ロッド14aに接合させて設けられた回転規制部材14cを駆動シリンダー13のロッド13bの動作範囲外のピン12aの回転方向前方に位置させて間歇回転円板12の無用の回転を防止するものとされる。すなわち、駆動シリンダー13により間歇回転円板12が回転されている間は、回転規制シリンダー14のロッド14aは退避位置とされた回転規制部材14cとピン12aとが係止しないようにされる一方、駆動シリンダー13か待機中および駆動位置に復帰中においては回転規制シリンダー14のロッド14aが進出して回転規制部材14cがピン12aとが係止して間歇回転円板12の回転を規制するものとされる。図中、符号16はピン12aと係止する回転規制部材14cの進退をガイドするガイド部材を示す。
【0064】
制御装置100は、間歇回転機構10、鍋予熱機構50および鍋加熱機構60を制御するようプログラムされたコンピュータとされ、例えばテーブルに付設される。
【0065】
間歇回転機構10の制御は、具体的には、駆動シリンダー13および回転規制シリンダー14が前述した動作をなすようになされる。
【0066】
また、鍋予熱機構50および鍋加熱機構60の制御は、具体的には、鍋予熱機構50および鍋加熱機構60の着火および消火ならびに火力の調節をなすものとされる。なお、鍋予熱機構50および鍋加熱機構60の着火および消火ならびに火力の調節はマニアル操作によりなされるようにされてもよい。
【0067】
しかして、本実施形態の自動調理システムSによれば、予熱され鍋蓋2が開いた鍋1に食材が投入されると、回転動作に連動して鍋蓋2が閉められて鍋1が逐次加熱されて食材が自動的に調理され、調理が終了すると回転動作に連動して鍋蓋2が開くとともに、鍋1が反転させられて調理品が受け皿に投下される。調理品が投下された鍋1は鍋蓋2が開いた状態で予熱位置まで回転される。以下、同様にして連続的に調理がなされる。
【0068】
実施形態2
本発明の実施形態2の自動調理システム(以下、単にシステムという)Sを図11にブロック図で示す。実施形態2は、実施形態1を改変してなるものとされ、鍋1をピッチングとローリングを組み合わせた動作がなし得るようにされてなるものとされる。鍋1にかかる動作をなさせることにより、クレープ生地用材料を鍋1の底に均一に延ばすことができる。
【0069】
具体的には、システムSは、図11に示すように、鍋動作機構70およびレーザセンサ80を付設してなるものとされとともに、撓み防止部材3および水平姿勢維持レール4を0度位置近傍において分割体3A,4Aを含むものとされる(図14参照)。
【0070】
撓み防止部材分割体3Aと水平姿勢維持レール分割体4Aは、テーブルTの下で接続部材7により接続されている。接続部材7の中央適宜位置には基端がテーブルTに固着されたスライド軸8にスライド自在に嵌合されたスカート付ボス状のスライド部材8aが嵌合されている。
【0071】
鍋動作機構70は、図12および図13に示すように、鍋動作体71と、鍋動作体71を回転させる回転機構72と、鍋動作体71の上下動の軌道を形成する軌道形成体73と、軌道形成体73を昇降させる昇降機構74とを含むものとされる。ここで、昇降機構74は、0度位置近傍の撓み防止部材分割体3Aおよび水平姿勢維持レール分割体4Aの昇降もなすようにされている。
【0072】
鍋動作体71は、同一円周上に十字状に配設された鍋支持部材71aと、鍋支持部材71aの倒れを防止する十字状に形成された倒れ防止部材71bと、鍋支持部材71aがセットされる基板71cとを含むものとされ、その中心が水平姿勢された鍋1の中心に位置するようにして鍋1の下方に配設される。
【0073】
鍋支持部材71aは、長さが最長の長尺片71eと、長さか最短の短尺片71fと、短尺片71fと長尺片71eとの中間の長さとされた中尺片71gとを含むものとされる。短尺片71f、中尺片71gおよび長尺片71eの頂点の位置は、クレープ生地用材料が鍋1の底でほどよく流れる傾斜となるよう調整されている。なお、各片71e,71f,71gの具体的な長さは試験に基づいて設定される。
【0074】
短尺片71f、中尺片71gおよび長尺片71eの頂部には、鍋1の円滑な動作を担保するためにコマが配設されている。また、長尺片71eの基端部近傍には軌道形成体73の頂面(軌道形成面)を走行するコマが配設されている。
倒れ防止部材71bは、短尺片71f、中尺片71gおよび長尺片71eの中間部より上の位置に水平に配設されている。
【0075】
基板71cは円形状とされ、その中心に後述する回転機構72の回転軸の先端が嵌合されている。
【0076】
回転機構72は、下部回転体76と、中間部回転体77と、上部回転体78とを含むものとされる。
【0077】
下部回転体76は、回転軸76aと、上部ベースUBにセットされて回転軸76aの中間部を回転自在に保持するスカート付ボス状の保持部材76bと、回転軸76aの基端にセットされたスプロケット76cとを含むものとされる。下部回転体76は、スプロケット76cがモータ(図示省略)によりチェーン駆動されて回転軸76aが回転するものとされる。
【0078】
中間部回転体77は、平行に垂設された一対の昇降ガイド軸77aと、ガイド軸77aの基端がセットされる下部保持部材77bと、ガイド軸77aにスライド自在に装着されたボス状のスライド部材77cと、スライド部材77cを保持する上部保持部材77dと、上部保持部材77dを跨ぐように配設された門型部材77eと、位置決め板77fとを含むものとされる。門型部材77eおよび位置決め板77fは、例えば、鋼板を折り曲げ成形して作製される。
【0079】
位置決め板77fは、レーザセンサ80による検出ターゲットとされる。
【0080】
下部保持部材77bの中心に下部回転体76の回転軸76aの上端が嵌合され、門型部材77eの上面中心に上部回転体78の回転軸78aの基端が嵌合される。
【0081】
上部回転体78は、前述した回転軸78aと、回転軸78aに外嵌されて回転軸78aの昇降をガイドするガイドパイプ78bと、回転軸78aを対称軸として対称に配設された一対の補強部材78cと、ガイドパイプ78bおよびガイド軸78cの各基端がセットされる下部保持部材78dと、ガイド軸78cにスライド自在に装着されたスカート付ボス状のスライド部材78eとを含むものとされる。
【0082】
回転軸78aの下端は、前述したように門型部材77eの上面中心に嵌合され、一方上端は、前述したように鍋動作体71の基板71c中心に嵌合される。
【0083】
軌道形成体73は、上端が斜に切った有底円筒体とされ、前述したように上端面が軌道形成面とされる。軌道形成体73は、背の低い方を基盤12側に向けて配設されている。
【0084】
底面73a中心には、上部回転体78のガイドパイプ78bの上端が嵌合され、ガイドパイプ78bの嵌合部を挟んでスライド部材78eがスカート部78esを底面73aに載置した状態で嵌合されている。
【0085】
昇降機構74は、軌道形成体73を昇降させるL字状に形成された昇降助勢部材74aと、昇降助勢部材74aの軌道形成体73側の端部にロッド74cの先端が水平にピン接合された昇降シリンダー74bと、昇降助勢部材74aの長辺の適宜位置に水平にピン接合されて昇降助勢部材74aのシーソー運動を助勢する支持部材74dとを含むものとされ、回転機構72に隣接させられて基盤12の反対側で上部ベースUBに配設される。
【0086】
昇降シリンダー74bは、電動シリンダーやエアシリンダーとされる。
【0087】
昇降助勢部材74aの長辺の軌道形成体73の下方位置には、軌道形成体73の底面73aとの当接部74fが形成されている。また、短辺の先端は接続部材7に当接されている。当接部74fおよび短辺の先端にはコマが装着されていて、円滑な動作が担保されている。
【0088】
昇降助勢部材74aのサイズおよびシーソー範囲は、鍋支持部材71aの長尺片71eが所定高さ位置で鍋1の底に当接するとともに、撓み防止部材分割体3Aおよび水平姿勢維持レール分割体4Aが所定の昇降動作がなし得るよう調整されている。
【0089】
アームAは、図14に示すように、アーム本体a1が分割体a1Aを含むものとされる。アーム本体a1と分割体a1Aとは水平にピン接合されて鍋1がピッチングできるようにされている。実施形態1で述べたように、アーム本体a1は回転自在とされているので、鍋1はピッチングとローリングとを組み合わせた動作をなすことが可能となる。
【0090】
次に、かかる構成とされている鍋動作機構70による鍋1の動作について説明する。なお、以下の動作は制御装置100の制御の下に自動的になされる。
【0091】
動作1:間歇回転駆動機構10により鍋1が0度の位置に到達すると、昇降シリンダー74bが駆動されてロッド74c先端が上昇する。
【0092】
動作2:前記動作により昇降助勢部材74aの長辺の軌道形成体73側の端部が上昇する一方、短辺の上端が下降する。
【0093】
動作3:前記動作により軌道形成体73が上昇する一方、撓み防止部材分割体3Aおよび水平姿勢維持レール分割体4Aが下降する。
【0094】
動作4:前記動作に応答して鍋支持部材71aが回転される。この回転中における各片71e,71f,71gの頂点の軌跡は軌道形成体73の軌道形成面により形成されるので、鍋1はローリングとピッチングが組み合わさった動作を行う。
【0095】
動作5:所定期間経過すると、鍋支持部材71aの回転が停止される。ここで、鍋支持部材71aの回転停止は、レーザセンサ80が、位置決め板77fの検出面を検出してから一定期間経過後になされるようにされているので、鍋支持部材71aは常に一定の位置で停止する。
【0096】
動作6:前記動作に応答して昇降シリンダー74bが動作されてロッド74c先端が下降する。
【0097】
動作7:前記動作により昇降助勢部材74aの長辺の軌道形成体73側の端部が下降する一方、短辺の上端が上昇する。
【0098】
動作8:前記動作により軌道形成体73、撓み防止部材分割体3Aおよび水平姿勢維持レール分割体4Aが初期位置に復帰する。
【0099】
このように、本実施形態によれば、鍋1が自動的にローリングとピッチングとが組み合わされた動作を行うので、人手をかけることなくクレープ生地用材料を均一に鍋1の底に延ばすことができる。
【0100】
実施形態3
本発明の実施形態3の要部を図15に示す。実施形態3は実施形態1を改変してなるものであって、図15に示すように、水平姿勢維持レール4のアームAの進入側に面取り状に形成された進入部4bを設け、一方アームAの離脱側に円弧状に形成された離脱誘導路4cを設けてなるものとされる。同様に、姿勢変更レール5のアームAの進入側に面取り状に形成された進入部5aを設け、一方アームAの離脱側に円弧状に形成された離脱誘導路5bを設けてなるものとされる。
【0101】
本実施形態においては、水平姿勢維持レール4および姿勢変更レール5が、前記の如く形成されているので、鍋1の姿勢変更が滑らかになされるという実施形態1に比して優れた効果を奏する。
【0102】
以上、本発明を実施形態に基づいて説明してきたが、本発明はかかる実施形態のみに限定されるものではなく、種々改変が可能である。
【0103】
例えば、本実施形態ではクレープ生地用材料を例に取り説明されているが、本発明の適用はクレープ生地用材料に限定されるものではなく、例えばホットケーキにも適用できる。
【産業上の利用可能性】
【0104】
加熱が必要な調理作業に適用できる。
【符号の説明】
【0105】
1 鍋
1a 接続部材
1b 凸片部
2 鍋蓋
3 撓み防止部材
3A 撓み防止部材分割体
4 水平姿勢維持レール
4A 水平姿勢維持レール分割体
4b 進入部
4c 離脱誘導部
5 姿勢変更レール
5a 進入部
5b 離脱誘導部
7 接続部材
8 スライド軸
10 間歇回転駆動機構
11 間歇回転駆動軸
12 間歇回転円板
13 駆動シリンダー
14 回転規制シリンダー
20 鍋姿勢変更機構
30 鍋姿勢維持機構
40 鍋蓋開閉機構
42 開閉制御板
50 鍋予熱機構
60 鍋加熱機構
70 鍋動作機構
71 鍋動作体
72 回転機構
73 軌道形成体
74 昇降機構
76 下部回転体
77 中間部回転体
77f 位置決め板
78 上部回転体
80 レーザセンサ
100 制御装置
S 自動調理システム
A アーム
a1 アーム本体
a2 セット部材
a3 水平姿勢制御補助部材
a4 姿勢変更制御補助部材
J 接続部
jc カラー
B ベース
UB 上部ベース
T テーブル
【特許請求の範囲】
【請求項1】
鍋を回転自在に保持するアームを間歇回転駆動する間歇回転駆動機構と、前記間歇回転駆動機構の間歇回転駆動に連動して鍋を反転させるとともに反転させられた鍋を元に戻す鍋姿勢変更機構と、前記間歇回転駆動機構の間歇回転駆動に連動して鍋を通常の姿勢と反転姿勢とに維持する鍋姿勢維持機構と、前記間歇回転駆動機構の間歇回転駆動に連動して鍋蓋を開閉する鍋蓋開閉機構と、鍋を予熱する鍋予熱機構と、鍋を加熱して調理する鍋加熱機構と、制御装置とを備え、
前記制御装置が、前記間歇回転駆動機構の間歇動作を制御することを特徴とする自動調理システム。
【請求項2】
鍋を保持するアームを間歇回転駆動する間歇回転駆動機構と、前記間歇回転駆動機構の間歇回転駆動に連動して鍋を反転させるとともに反転させられた鍋を元に戻す鍋姿勢変更機構と、前記間歇回転駆動機構の間歇回転駆動に連動して鍋を通常の姿勢と反転姿勢とに維持する鍋姿勢維持機構と、前記間歇回転駆動機構の間歇回転駆動に連動して鍋蓋を開閉する鍋蓋開閉機構と、鍋を予熱する鍋予熱機構と、鍋を加熱して調理する鍋加熱機構と、鍋動作機構と、制御装置とを備え、
前記アームはアーム本体と、前記アーム本体と水平にピン接合され鍋を保持するアーム分割体とを含み、
前記制御装置が、前記間歇回転駆動機構の間歇動作を制御し、前記鍋動作機構による鍋のピッチングとローリングとが組み合わされた動作を制御することを特徴とする自動調理システム。
【請求項3】
レーザセンサと、鍋動作機構が前記レーザセンサの検出対象である位置決め板とを有し、
制御装置が、前記レーザセンサからの前記位置決め板の検出信号に基づいて前記鍋動作機構の停止動作を制御することを特徴とする請求項2記載の自動調理システム。
【請求項4】
間歇回転駆動機構は、間歇回転円板と、前記間歇回転円板を回転駆動する駆動シリンダーと、前記間歇回転円板の回転を規制する回転規制シリンダーとを含むものとされてなることを特徴とする請求項1または2記載の自動調理システム。
【請求項5】
鍋姿勢維持機構は、水平姿勢維持範囲に配設された水平姿勢維持レールと、前記レール上を走行するアームに装着された水平姿勢制御補助部材とを含むものとされてなることを特徴とする請求項1または2記載の自動調理システム。
【請求項6】
鍋姿勢変更機構は、姿勢変更範囲に配設された姿勢変更レールと、前記レール上を走行するアームに装着された姿勢変更制御補助部材とを含むものとされてなることを特徴とする請求項1または2記載の自動調理システム。
【請求項7】
鍋蓋開閉機構は、鍋蓋支持機構と、鍋蓋の開閉動作範囲に配設された開閉制御板とを含み、
前記鍋蓋支持機構は、基盤側部材と鍋蓋側部材とが水平にピン接合されてなるリンク機構とされ、
前記鍋蓋側部材は、前記開閉制御板と当接して鍋蓋の開閉を制御するローラーを有することを特徴とする請求項1または2記載の自動調理システム。
【請求項8】
鍋動作機構は、鍋底に当接して鍋を動作させる鍋動作体と、前記鍋動作体を回転させる回転機構と、前記鍋動作体の上下動の軌道を形成する軌道形成体と、前記軌道形成体を昇降させる昇降機構とを含み、
前記鍋動作体は、同一円周上に十字状に配設された鍋支持部材を含み、
前記鍋支持部材は、長さが最長の長尺片と、長さが最短の短尺片と、前記長尺片と前記短尺片との中間の長さとされた二本の中間片とを含み、
前記長尺、中間片および片短尺片の各頂点の位置は、鍋の中の材料がほどよく流れる傾斜となるようにされてなる
ことを特徴とする請求項2記載の自動調理システム。
【請求項1】
鍋を回転自在に保持するアームを間歇回転駆動する間歇回転駆動機構と、前記間歇回転駆動機構の間歇回転駆動に連動して鍋を反転させるとともに反転させられた鍋を元に戻す鍋姿勢変更機構と、前記間歇回転駆動機構の間歇回転駆動に連動して鍋を通常の姿勢と反転姿勢とに維持する鍋姿勢維持機構と、前記間歇回転駆動機構の間歇回転駆動に連動して鍋蓋を開閉する鍋蓋開閉機構と、鍋を予熱する鍋予熱機構と、鍋を加熱して調理する鍋加熱機構と、制御装置とを備え、
前記制御装置が、前記間歇回転駆動機構の間歇動作を制御することを特徴とする自動調理システム。
【請求項2】
鍋を保持するアームを間歇回転駆動する間歇回転駆動機構と、前記間歇回転駆動機構の間歇回転駆動に連動して鍋を反転させるとともに反転させられた鍋を元に戻す鍋姿勢変更機構と、前記間歇回転駆動機構の間歇回転駆動に連動して鍋を通常の姿勢と反転姿勢とに維持する鍋姿勢維持機構と、前記間歇回転駆動機構の間歇回転駆動に連動して鍋蓋を開閉する鍋蓋開閉機構と、鍋を予熱する鍋予熱機構と、鍋を加熱して調理する鍋加熱機構と、鍋動作機構と、制御装置とを備え、
前記アームはアーム本体と、前記アーム本体と水平にピン接合され鍋を保持するアーム分割体とを含み、
前記制御装置が、前記間歇回転駆動機構の間歇動作を制御し、前記鍋動作機構による鍋のピッチングとローリングとが組み合わされた動作を制御することを特徴とする自動調理システム。
【請求項3】
レーザセンサと、鍋動作機構が前記レーザセンサの検出対象である位置決め板とを有し、
制御装置が、前記レーザセンサからの前記位置決め板の検出信号に基づいて前記鍋動作機構の停止動作を制御することを特徴とする請求項2記載の自動調理システム。
【請求項4】
間歇回転駆動機構は、間歇回転円板と、前記間歇回転円板を回転駆動する駆動シリンダーと、前記間歇回転円板の回転を規制する回転規制シリンダーとを含むものとされてなることを特徴とする請求項1または2記載の自動調理システム。
【請求項5】
鍋姿勢維持機構は、水平姿勢維持範囲に配設された水平姿勢維持レールと、前記レール上を走行するアームに装着された水平姿勢制御補助部材とを含むものとされてなることを特徴とする請求項1または2記載の自動調理システム。
【請求項6】
鍋姿勢変更機構は、姿勢変更範囲に配設された姿勢変更レールと、前記レール上を走行するアームに装着された姿勢変更制御補助部材とを含むものとされてなることを特徴とする請求項1または2記載の自動調理システム。
【請求項7】
鍋蓋開閉機構は、鍋蓋支持機構と、鍋蓋の開閉動作範囲に配設された開閉制御板とを含み、
前記鍋蓋支持機構は、基盤側部材と鍋蓋側部材とが水平にピン接合されてなるリンク機構とされ、
前記鍋蓋側部材は、前記開閉制御板と当接して鍋蓋の開閉を制御するローラーを有することを特徴とする請求項1または2記載の自動調理システム。
【請求項8】
鍋動作機構は、鍋底に当接して鍋を動作させる鍋動作体と、前記鍋動作体を回転させる回転機構と、前記鍋動作体の上下動の軌道を形成する軌道形成体と、前記軌道形成体を昇降させる昇降機構とを含み、
前記鍋動作体は、同一円周上に十字状に配設された鍋支持部材を含み、
前記鍋支持部材は、長さが最長の長尺片と、長さが最短の短尺片と、前記長尺片と前記短尺片との中間の長さとされた二本の中間片とを含み、
前記長尺、中間片および片短尺片の各頂点の位置は、鍋の中の材料がほどよく流れる傾斜となるようにされてなる
ことを特徴とする請求項2記載の自動調理システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2013−70859(P2013−70859A)
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願番号】特願2011−212706(P2011−212706)
【出願日】平成23年9月28日(2011.9.28)
【出願人】(511010004)株式会社ミルクワークス (2)
【出願人】(311014129)株式会社SEシステム (2)
【Fターム(参考)】
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願日】平成23年9月28日(2011.9.28)
【出願人】(511010004)株式会社ミルクワークス (2)
【出願人】(311014129)株式会社SEシステム (2)
【Fターム(参考)】
[ Back to top ]