
自動走行装置
【課題】障害物を回避することが可能な自動走行装置であって、操作者の意思に近い動作をすることができる自動走行装置を提供することである。
【解決手段】駆動源と該駆動源により駆動される駆動輪とを有し、該駆動輪の駆動によって走行体を自動的に走行させるとともに、前記走行体に回転可能に固定された自動走行装置において、前記駆動源として用いたモータの負荷が所定値以上で、かつ前記走行体に対する回転角度が所定値以上のときに前記駆動輪を正回転から逆回転に切り替えることによって、前記走行体を前進から後退に走行方向の切換を行う。
【解決手段】駆動源と該駆動源により駆動される駆動輪とを有し、該駆動輪の駆動によって走行体を自動的に走行させるとともに、前記走行体に回転可能に固定された自動走行装置において、前記駆動源として用いたモータの負荷が所定値以上で、かつ前記走行体に対する回転角度が所定値以上のときに前記駆動輪を正回転から逆回転に切り替えることによって、前記走行体を前進から後退に走行方向の切換を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自動走行装置に関するものであり、特に好適には、走行体が障害物等に衝突した場合には、当該走行体が当該障害物を避けるように走行できるようにする自動走行装置に関するものである。
【背景技術】
【0002】
走行体が障害物に衝突した際において、走行体の走行の方向を変更することにより、当該障害物を避ける構成としては、たとえば、特許文献1などがある。特許文献1に記載の構成は、モータに印加する電圧を制御する駆動制御手段と、このモータに流れる電流を検出する検出手段と、この検出手段が過負荷電流検出信号を出力すると、前記駆動制御手段にモータを逆回転させる制御信号を出力する種制御手段とからなる制御スイッチ回路を備える走行玩具が開示されている。
【0003】
このような構成によれば、この走行玩具は、電源スイッチをONにすることで走行を開始し、壁や段差などの障害物にぶつかると、自動的に後退して障害物を回避することができる。
【0004】
しかしながら、特許文献1に記載の構成は、モータに負荷が掛かった場合にモータを逆回転させる制御だけしか行っていない。このため、走行体の駆動輪を駆動させる走行アシスト装置に適用すると、走行体が障害物などに衝突することをトリガーとして走行体を後退させるので、操作者の意に反して走行体が後退する場合が多発する。すなわち、走行体をバックさせることなく回避可能な障害物に衝突したとしても、モータが逆回転するため、操作者の意に反して走行体が後退する場合が多発するおそれがある。
【0005】
一方、モータに掛かる負荷が所定の値以上になったときにモータを逆回転させるように設定した場合には、バックしなければ回避できない障害物に衝突しても、モータに所定の値以上の負荷が掛からなければ、モータは逆転しない。このため、このような構成とすると、速やかに障害物を回避できないという問題が発生するおそれがある。
【0006】
【特許文献1】特開2006−288447号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
上記実情に鑑み、本発明が解決しようとする課題は、障害物を回避することが可能な自動走行装置であって、操作者の意思に近い動作をすることができる自動走行装置を提供することである。
【課題を解決するための手段】
【0008】
前記課題を解決するため本発明は、駆動源(たとえば回転動力源)と該駆動源により駆動される出力部とを有し、該出力部の駆動によって走行体を自動的に走行させるとともに前記走行体に回転可能に固定された自動走行装置において、前記駆動源として用いたモータの負荷が所定値以上で、かつ前記走行体に対する回転角度が所定値以上のときに前記出力部を正回転から逆回転に切り替えることによって、前記走行体を前進から後退に走行方向の切換を行うことを要旨とするものである。
【0009】
ここで、前記走行体に対する回転角度を検出するため、前記走行体に一方側が固定された検出手段の他方側が固定されることが好ましい。
【0010】
また、前記走行体は走行方向前方側から引っ張り手段によって引っ張られるように構成され、前記走行体に走行方向後方に配設された後輪より前方に配設されるとともに、前記走行体に走行方向前方に突出した角部障害物に衝突したのち、前記引っ張り手段により引っ張られて前記走行体に対する角度が変化することが好ましい。
【発明の効果】
【0011】
本発明によれば、走行体が障害物等に接触など場合であっても、駆動源のモータに掛かる負荷が所定の値以上になった場合で、かつ舵角が所定の値以上になった場合にのみ走行体は後退して障害物等を回避する。これに対して、モータに掛かる負荷が所定の値以上になった場合であっても、舵角が所定の値以下であれば、当該障害物を乗りこえることができると判断して、走行体は後退しない。また、舵角が所定の値以上になった場合であっても、モータに掛かる負荷が所定の値以上にならなければ、走行体は後退しない。このように、本発明の実施形態にかかる自動走行装置は、これを備える走行体が障害物等に接触等した場合であっても、操作者の意思に近い動作をすることができる。
【発明を実施するための最良の形態】
【0012】
以下に、本発明の実施形態について、図面を参照して詳細に説明する。
【0013】
図1は、本発明の実施形態にかかる自動走行装置1a、1bと、これを備える走行体5の構成を、模式的に示した外観平面図であり、(a)は側面から見た図、(b)は前方から見た図、(c)は下方から見た図である。この走行体5は、外力により前方から引っ張られるとともに、本発明の実施形態にかかる自動走行装置1a、1bにより走行をアシストする玩具などが適用される。この走行体5を牽引するものとして、動力源を備える不図示の牽引体が適用できる。
【0014】
図1(a)、(b)、(c)に示すように、この走行体5は、本発明の実施形態にかかる左右一組の自動走行装置1a、1bと、後輪51と、連結部52と、リンク53とを備える。
【0015】
連結部52は、この走行体5とは別体の牽引体によりこの走行体5を牽引するために、牽引体と連結するためのものである。この連結部5は、牽引体と連結できる構成であればよく、図1に示すようなカギ状の形状の他、その他種々の形状のものが適用できる。要は、牽引体と連結できる構成であればよく、具体的な構成は限定されるものではない。
【0016】
後輪51は、走行体5に回転可能に支持される。この後輪51は、特に動力源などによって駆動されるものではなく、走行体5の走行に伴って回転するものである。
【0017】
リンク53は、左右一組の自動走行装置1a、1bを連結する部材である。このリンク53により、左右一組の自動走行装置1a、1bは連結されており、左右一組の自動走行装置1a、1bが常に同じ方向を向くように構成される。
【0018】
図2は、本発明の実施形態にかかる左右一組のうちの一方の自動走行装置1aの構成を模式的に示した平面図であり、(a)は上方から見た図、(b)はケース(筐体)を切り欠いて側方から見た図である。また、図3は、本発明の実施形態にかかる一方の自動走行装置1aのケース(筐体)を取り除いた状態の構成を模式的に示した外観斜視図であり、(a)は上方側から見た図、(b)は下方側から見た図である。なお、他方の自動走行装置1bは、一方の自動走行装置1aと略同一の機構を備えるため、異なる部分について説明し、共通の部分の説明は省略する。
【0019】
図2、図3に示すように、本発明の実施形態にかかる左右一組のうちの一方の自動走行装置1aは、フレーム11と、取り付け軸12と、舵角検出手段取り付け基板13と、角部としての操舵突起14と、舵角検出手段15と、駆動源である回転動力源16と、歯車輪列17と、駆動輪18と、負荷検出手段19とを有する。
【0020】
取り付け軸12は、本発明の実施形態にかかる一方の自動走行装置1aを、走行体5に取り付けるための軸である。そして、本発明の実施形態にかかる一方の自動走行装置1aは、取り付け軸12によって走行体5に取り付けられた状態において、この取り付け軸12を中心として走行体5に対して回転することができる。
【0021】
舵角検出手段取り付け基板13は、後述する舵角検出手段15が設けられる基板である。この舵角検出手段取り付け基板13には、前記取り付け軸12を遊挿可能な貫通孔131が形成されており、本発明の実施形態にかかる一方の自動走行装置1aのフレーム11に対して回転可能に取り付けられる。また、この舵角検出手段取り付け基板13は、本発明の実施形態にかかる一方の自動走行装置1aが走行体5に組み付けられた状態において、走行体5に固定される。
【0022】
角部としての操舵突起14は、本発明の実施形態にかかる一方の自動走行装置1aが、牽引体に引っ張られて走行している際に、障害物などに接触した場合に、本発明の実施形態にかかる一方の自動走行装置1aの走行方向を変更するためのものである。操舵突起14は、具体的には、フレーム11から進行方向前方に向かって突出する突起であり、前面から見た場合において、たとえば、走行体5の外側に位置するように設けられる。他方の自動走行装置1bにも、角部としての操舵突起14が走行体5の外側に位置するように設けられる。換言すると、一組の自動走行装置1a、1bには、左右対称となるように、一本ずつの操舵突起14が設けられる。
【0023】
舵角検出手段15は、舵角が所定の角度を超えたか否かを検出することができる。ここで、「舵角(回転角度)」とは、走行体5の進行しようとする方向(換言すると、舵角検出手段取り付け基板13は走行体5に固定されているので、舵角検出手段取り付け基板13の向き)と、本発明の実施形態にかかる自動走行装置1a、1bが進行しようとする方向との間の角度(回転角度)をいうものとする。
【0024】
舵角検出手段15には、発光手段151と受光手段152と舵角検出突起111の組合せが適用できる。具体的な構成は次のとおりである。舵角検出手段取り付け基板13は、取り付け軸12を遊挿可能な貫通孔(取り付け孔)131が形成されており、この取り付け軸12を中心として回転可能に配設される。そして、この舵角検出手段取り付け基板13には、この取り付け孔131に略同心の円弧状かつスリット状の貫通孔132が、この取り付け孔131を囲むように形成される。
【0025】
そして、この舵角検出手段取り付け基板13の所定の位置に、この円弧状の貫通孔132を挟んで、発光手段151と受光手段152とが対向するように設けられる。すなわち、発光手段が151発する光を、受光手段152が受光することができるように構成される。
【0026】
一方、フレーム11には、この円弧状の貫通孔132に遊挿可能な舵角検出突起111が設けられている。この舵角検出突起111は、取り付け軸12の軸線方向に略平行に突出する突起である。そして、舵角検出手段取り付け基板13がフレーム11に組み付けられた状態において、この舵角検出突起111は、前記円弧状の貫通孔132を貫通して、上面側に突出する。
【0027】
このような構成によれば、フレーム11と舵角検出手段取り付け基板13とが取り付け軸12を中心として相対的に回転すると、舵角検出突起111が前記円弧状の貫通孔132をスライドするように相対的に回転移動することができる。そして、ある所定の角度において、舵角検出突起111が発光手段151と受光手段152との間に位置することになる。
【0028】
そうすると、発光手段151が発する光が舵角検出突起111により遮られ、受光手段152は、発光手段151が発する光を受光することができなくなる。このように、受光手段152が発光手段151の発する光を受光しなくなることをもって、フレーム11と舵角検出手段取り付け基板13(すなわち走行体5)とが所定の角度関係になったことを検出できる。
【0029】
なお、発光手段151、受光手段152ともに、公知の各種発光手段、受光手段を適用することができる。たとえば発光手段151には、発光ダイオードなどが適用できる。たとえば受光手段152には、フォトダイオードやフォトトランジスタなどが適用できる。
【0030】
このほか、舵角検出手段15には、磁石とホールICとの組合せが適用できる。具体的な構成は次のとおりである。
【0031】
舵角検出手段取り付け基板13は、取り付け軸12を遊挿可能な貫通孔(取り付け孔)131が形成されており、この取り付け軸12を中心として回転可能に配設される。そして、この舵角検出手段取り付け基板13には、この取り付け孔131に略同心の円弧状かつスリット状の貫通孔132が、この取り付け孔12を囲むように形成される。
【0032】
そして、この円弧状の貫通孔132ぎわの所定の位置に、ホールICが設けられる。
【0033】
一方、フレーム11には、この円弧状の貫通孔132に遊挿可能な舵角検出突起111が設けられている。この舵角検出突起111は、取り付け軸12の軸線方向に略平行に突出する突起である。この舵角検出突起111は、舵角検出手段取り付け基板13がフレーム11に組み付けられた状態において、前記円弧状の貫通孔132を貫通して、上面側に突出する。そして、この舵角検出突起111の上面側に突出した部分には、磁石が設けられる。
【0034】
このような構成によれば、フレーム11と舵角検出手段取り付け基板13とが取り付け軸12を中心として相対的に回転すると、舵角検出突起111が前記円弧状の貫通孔132をスライドするように相対的に回転移動することができる。そして、ある所定の角度において、舵角検出突起111に設けられる磁石がホールICの近傍に位置することになる。そうすると、磁石が発する磁界をホールICが検出する。
【0035】
このように、ホールICが、舵角検出突起111に設けられる磁石が発する磁界を検知することによって、フレーム11と舵角検出手段取り付け基板13(すなわち走行体5)とが所定の角度関係になったことを検出できる。
【0036】
なお、本発明の実施形態にかかる一方の自動走行装置1aにおいては、舵角検出手段取り付け基板13を用いる構成を示したが、必ずしも舵角検出手段取り付け基板13は必要ではない。すなわち、走行体5に舵角検出突起111が遊挿する円弧状の貫通孔が形成されるとともに、走行体5に舵角検出手段15を設ける構成であってもよい。また、舵角検出手段15は、一組の自動走行装置1a、1bのうちの一方が備えればよい。すなわち、一組の自動走行装置1a、1bの両方が備える必要はない。本発明の実施形態においては、一方の自動走行装置1aが舵角検出手段15を備える構成を示しているが、他方の自動走行装置1bが備える構成であってもよい。
【0037】
回転動力源16には、公知の各種電動機(モータ)が適用できる。そして回転動力源16が発する回転動力は、歯車輪列17を介して出力部(すなわち駆動輪18)に伝達される。走行体5は、このようにして、牽引体により牽引される力に加えて、駆動輪18の回転によって、走行することができる。
【0038】
歯車輪列17の具体的な構成は特に限定されるものではなく、回転動力源16が発する回転動力を、駆動輪18に伝達できる構成であればよい。たとえば図3(特に図3(b))に基づいて説明すると、本発明の実施形態にかかる自動走行装置は、回転駆動源16と、第一の歯車171と、第二の歯車172と、第三の歯車173と、第四の歯車174と、第五の歯車175と、第六の歯車176と、駆動輪18とを備える
【0039】
第一の歯車171は回転駆動源16の駆動軸に嵌合される。第二の歯車172は第一の歯車171と噛合する。第三の歯車173は第二の歯車172に同軸に設けられるとともに、第二の歯車172と一体に回転するように構成される。第四の歯車174は第三の歯車173に噛合し、第五の歯車175は第四の歯車174に噛合する。第六の歯車176は第五の歯車175に噛合するとともに、駆動輪18に同軸に配設される。そしてこの駆動輪18は第六の歯車176と一体に回転するように構成される。
【0040】
負荷検出手段(図略)は、回転動力源に掛かる負荷が所定の値以上であるかどうかを検出する。負荷検出手段には、たとえば、エンコーダを用いた速度監視をするものや、モータの電流の上昇度合を監視するものが適用できる。
【0041】
このような構成によれば、回転駆動源16の回転動力を駆動輪18に伝達することができる。これによって、走行体5は、牽引体の牽引力に加えて、駆動輪18の回転により走行することができる。また、舵角検出手段取り付け基板13とフレーム11(すなわち本発明の実施形態にかかる自動走行装置1a、1bの進行方向)との角度が所定の値以上になったか、および回転動力源(モータ)16に掛かる負荷が所定の値以上になったかを検出することができる。
【0042】
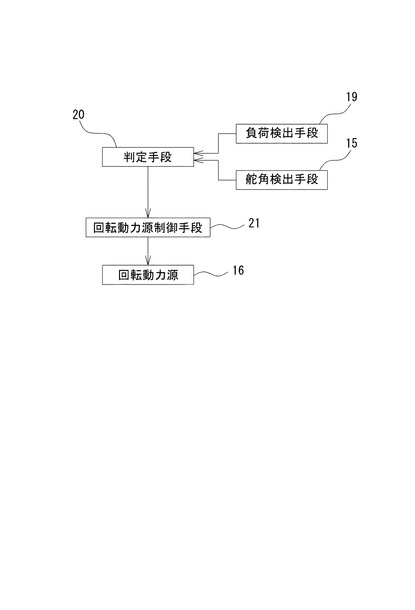
図4は、本発明の実施形態にかかる自動走行装置の構成を模式的に示したブロック図である。図4に示すように、本発明の実施形態にかかる一方の自動走行装置1aは、負荷検出手段19と、舵角検出手段15と、判定手段20と、回転動力源制御手段21と、回転動力源16とを備える。
【0043】
前記のとおり負荷検出手段19は、回転動力源(モータ)16に掛かる負荷が所定の値以上になったか否かを検出することができる。また、舵角検出手段15は、舵角が所定の値以上になったか否かを検出することができる。判定手段20は、負荷検出手段19と舵角検出手段15の検出結果に基づいて、回転動力源制御手段21を制御する。回転動力源制御手段21は、判定手段20の判定結果に基づいて、回転動力源(モータ)16の正回転と逆回転を切り替えることにより、前進から後退に走行方向の切り替えを行うことができる。
【0044】
すなわち、判定手段20により、回転動力源(モータ)16に掛かる負荷が所定の値以上であり、かつ舵角が所定の値以上になったと判定された場合には、回転動力源制御手段21を介して回転動力源(モータ)16の正回転と逆回転を切り替えることにより、前進から後退に走行方向の切り替えを行うことができる。
【0045】
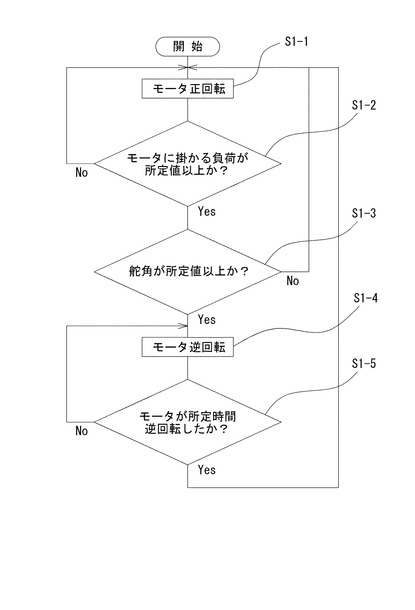
次に、このような構成を有する自動走行装置1a、1bおよびこの自動走行装置1a、1bを有する走行体5の動作について説明する。図5は、本発明の実施形態にかかる自動走行装置1の動作を示したフローチャートである。
【0046】
自動走行装置1a、1bおよび走行体5が「正常な走行状態」にある場合においては、回転動力源(モータ)16は正回転をしている(ステップS1−1)。ここで「正常な走行状態」とは、走行体5(すなわち舵角検出手段取り付け基板13)と自動走行装置1a、1bとの角度が、所定の値以下であるとともに、回転動力源(モータ)16に掛かる負荷が所定の値以下であり、かつ、本発明の実施形態にかかる自動走行装置1a、1bが走行体5の走行をアシストしている状態をいう。
【0047】
そして、負荷検出手段19は、回転動力源(モータ)16に掛かる負荷が所定の値以上になったか否かを、継続的に検出している(ステップS1−2)。回転動力源(モータ)16に掛かる負荷が所定の値以下であれば、ステップS1−1に戻り、ステップS1−1とステップS1−2の動作を継続する。
【0048】
走行体5が障害物などに接触するなどして、回転動力源(モータ)16に掛かる負荷が所定の値以上になった場合には(ステップS1−2において「Yes」)、舵角検出手段15は、本発明の実施形態にかかる自動走行装置1と走行体5との舵角が所定の値以上になっているか否かを判定する(ステップS1−3)。
【0049】
回転動力源(モータ)16に掛かる負荷が所定の値以上であっても(ステップS1−2において「Yes」)、舵角が所定の値以上でなければ(ステップS1−3において「No」)、ステップS1−2に戻る。そして回転動力源(モータ)16は正回転を続け、回転動力源(モータ)16の正回転により障害物などを乗りこえる。
【0050】
一方、回転動力源(モータ)16に掛かる負荷が所定の値以上であって(ステップS1−2において「Yes」)、かつ舵角が所定の値以上(ステップS1−3において「Yes」)となった場合には、ステップS1−4において、所定の時間だけ回転動力源(モータ)16を逆回転させる。これにより走行体5は後退し、障害物等から離れる。
【0051】
そして所定の時間が経過するまで回転動力源(モータ)16の逆回転を継続し(ステップS1−5において「No」)、所定の時間だけ逆回転したら(ステップS1−5において「Yes」)、ステップS1−1に戻り、回転動力源(モータ)16を正回転させる。
【0052】
このような動作によれば、走行体が障害物等にぶつかった場合であっても、回転動力源(モータ)16に掛かる負荷が所定の値以上になった場合で、かつ舵角が所定の値以上になった場合にのみ走行体5は後退して障害物等を回避する。これに対して、回転動力源(モータ)16に掛かる負荷が所定の値以上になった場合であっても、舵角が所定の値以下であれば、当該障害物を乗りこえることができると判断して、走行体5は後退しない。また、舵角が所定の値以上になった場合であっても、モータに掛かる負荷が所定の値以上にならなければ、走行体5は後退しない。このように、本発明の実施形態にかかる自動走行装置1a、1bは、これを備える走行体5が障害物等に接触等した場合であっても、操作者の意思に近い動作をすることができる。
【図面の簡単な説明】
【0053】
【図1】本発明の実施形態にかかる自動走行装置を備える走行体の構成を模式的に示した平面図であり、(a)は下方から見た図、(b)は前方から見た図、(c)は側面から見た図である。
【図2】本発明の実施形態にかかる自動走行装置の構成を模式的に示した平面図であり、(a)は上方から見た図、(b)は側方から見た図である。
【図3】本発明の実施形態にかかる自動走行装置の構成を模式的に示した外観斜視図であり、(a)は斜め上方から見た図、(b)は斜め下方から見た図である。
【図4】本発明の実施形態にかかる自動走行装置の構成を模式的に示したブロック図である。
【図5】本発明の実施形態にかかる自動走行装置の動作を示したフローチャートである。
【符号の説明】
【0054】
1a、1b 自動走行装置
11 フレーム
111 舵角検出突起
12 取り付け軸
13 舵角検出手段取り付け基板
131 取り付け軸用貫通孔
132 舵角検出手段用貫通孔
14 操舵突起
15 舵角検出手段
151 発光手段
152 受光手段
16 回転動力源
17 歯車輪列
171 第一の歯車
172 第二の歯車
173 第三の歯車
174 第四の歯車
175 第五の歯車
176 第六の歯車
18 駆動輪
19 負荷検出手段
20 判定手段
21 回転動力源制御手段
5 走行体
51 後輪
52 連結部
【技術分野】
【0001】
本発明は、自動走行装置に関するものであり、特に好適には、走行体が障害物等に衝突した場合には、当該走行体が当該障害物を避けるように走行できるようにする自動走行装置に関するものである。
【背景技術】
【0002】
走行体が障害物に衝突した際において、走行体の走行の方向を変更することにより、当該障害物を避ける構成としては、たとえば、特許文献1などがある。特許文献1に記載の構成は、モータに印加する電圧を制御する駆動制御手段と、このモータに流れる電流を検出する検出手段と、この検出手段が過負荷電流検出信号を出力すると、前記駆動制御手段にモータを逆回転させる制御信号を出力する種制御手段とからなる制御スイッチ回路を備える走行玩具が開示されている。
【0003】
このような構成によれば、この走行玩具は、電源スイッチをONにすることで走行を開始し、壁や段差などの障害物にぶつかると、自動的に後退して障害物を回避することができる。
【0004】
しかしながら、特許文献1に記載の構成は、モータに負荷が掛かった場合にモータを逆回転させる制御だけしか行っていない。このため、走行体の駆動輪を駆動させる走行アシスト装置に適用すると、走行体が障害物などに衝突することをトリガーとして走行体を後退させるので、操作者の意に反して走行体が後退する場合が多発する。すなわち、走行体をバックさせることなく回避可能な障害物に衝突したとしても、モータが逆回転するため、操作者の意に反して走行体が後退する場合が多発するおそれがある。
【0005】
一方、モータに掛かる負荷が所定の値以上になったときにモータを逆回転させるように設定した場合には、バックしなければ回避できない障害物に衝突しても、モータに所定の値以上の負荷が掛からなければ、モータは逆転しない。このため、このような構成とすると、速やかに障害物を回避できないという問題が発生するおそれがある。
【0006】
【特許文献1】特開2006−288447号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
上記実情に鑑み、本発明が解決しようとする課題は、障害物を回避することが可能な自動走行装置であって、操作者の意思に近い動作をすることができる自動走行装置を提供することである。
【課題を解決するための手段】
【0008】
前記課題を解決するため本発明は、駆動源(たとえば回転動力源)と該駆動源により駆動される出力部とを有し、該出力部の駆動によって走行体を自動的に走行させるとともに前記走行体に回転可能に固定された自動走行装置において、前記駆動源として用いたモータの負荷が所定値以上で、かつ前記走行体に対する回転角度が所定値以上のときに前記出力部を正回転から逆回転に切り替えることによって、前記走行体を前進から後退に走行方向の切換を行うことを要旨とするものである。
【0009】
ここで、前記走行体に対する回転角度を検出するため、前記走行体に一方側が固定された検出手段の他方側が固定されることが好ましい。
【0010】
また、前記走行体は走行方向前方側から引っ張り手段によって引っ張られるように構成され、前記走行体に走行方向後方に配設された後輪より前方に配設されるとともに、前記走行体に走行方向前方に突出した角部障害物に衝突したのち、前記引っ張り手段により引っ張られて前記走行体に対する角度が変化することが好ましい。
【発明の効果】
【0011】
本発明によれば、走行体が障害物等に接触など場合であっても、駆動源のモータに掛かる負荷が所定の値以上になった場合で、かつ舵角が所定の値以上になった場合にのみ走行体は後退して障害物等を回避する。これに対して、モータに掛かる負荷が所定の値以上になった場合であっても、舵角が所定の値以下であれば、当該障害物を乗りこえることができると判断して、走行体は後退しない。また、舵角が所定の値以上になった場合であっても、モータに掛かる負荷が所定の値以上にならなければ、走行体は後退しない。このように、本発明の実施形態にかかる自動走行装置は、これを備える走行体が障害物等に接触等した場合であっても、操作者の意思に近い動作をすることができる。
【発明を実施するための最良の形態】
【0012】
以下に、本発明の実施形態について、図面を参照して詳細に説明する。
【0013】
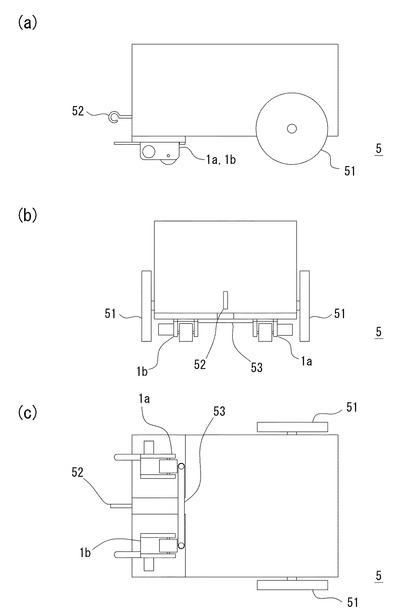
図1は、本発明の実施形態にかかる自動走行装置1a、1bと、これを備える走行体5の構成を、模式的に示した外観平面図であり、(a)は側面から見た図、(b)は前方から見た図、(c)は下方から見た図である。この走行体5は、外力により前方から引っ張られるとともに、本発明の実施形態にかかる自動走行装置1a、1bにより走行をアシストする玩具などが適用される。この走行体5を牽引するものとして、動力源を備える不図示の牽引体が適用できる。
【0014】
図1(a)、(b)、(c)に示すように、この走行体5は、本発明の実施形態にかかる左右一組の自動走行装置1a、1bと、後輪51と、連結部52と、リンク53とを備える。
【0015】
連結部52は、この走行体5とは別体の牽引体によりこの走行体5を牽引するために、牽引体と連結するためのものである。この連結部5は、牽引体と連結できる構成であればよく、図1に示すようなカギ状の形状の他、その他種々の形状のものが適用できる。要は、牽引体と連結できる構成であればよく、具体的な構成は限定されるものではない。
【0016】
後輪51は、走行体5に回転可能に支持される。この後輪51は、特に動力源などによって駆動されるものではなく、走行体5の走行に伴って回転するものである。
【0017】
リンク53は、左右一組の自動走行装置1a、1bを連結する部材である。このリンク53により、左右一組の自動走行装置1a、1bは連結されており、左右一組の自動走行装置1a、1bが常に同じ方向を向くように構成される。
【0018】
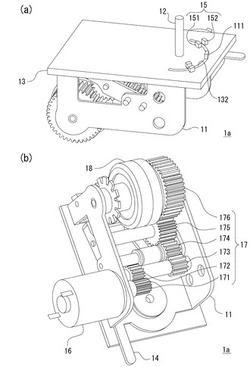
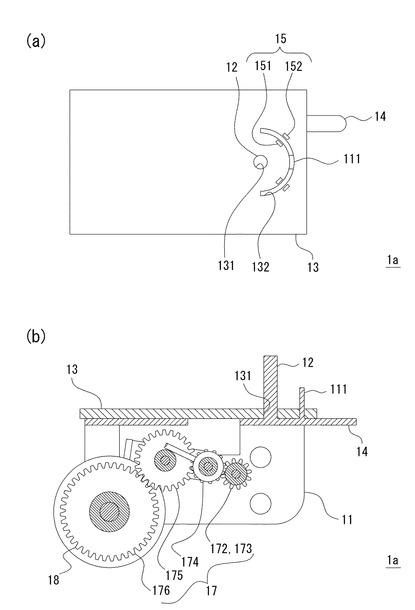
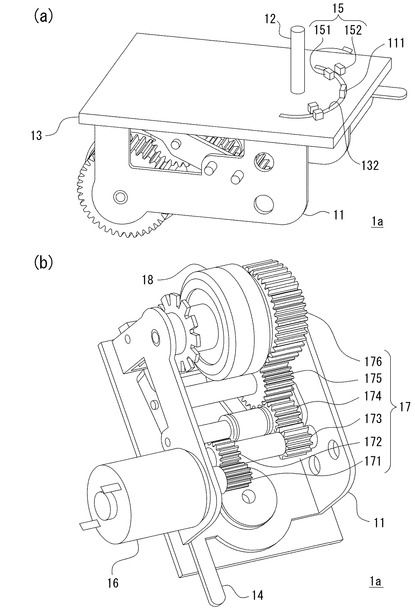
図2は、本発明の実施形態にかかる左右一組のうちの一方の自動走行装置1aの構成を模式的に示した平面図であり、(a)は上方から見た図、(b)はケース(筐体)を切り欠いて側方から見た図である。また、図3は、本発明の実施形態にかかる一方の自動走行装置1aのケース(筐体)を取り除いた状態の構成を模式的に示した外観斜視図であり、(a)は上方側から見た図、(b)は下方側から見た図である。なお、他方の自動走行装置1bは、一方の自動走行装置1aと略同一の機構を備えるため、異なる部分について説明し、共通の部分の説明は省略する。
【0019】
図2、図3に示すように、本発明の実施形態にかかる左右一組のうちの一方の自動走行装置1aは、フレーム11と、取り付け軸12と、舵角検出手段取り付け基板13と、角部としての操舵突起14と、舵角検出手段15と、駆動源である回転動力源16と、歯車輪列17と、駆動輪18と、負荷検出手段19とを有する。
【0020】
取り付け軸12は、本発明の実施形態にかかる一方の自動走行装置1aを、走行体5に取り付けるための軸である。そして、本発明の実施形態にかかる一方の自動走行装置1aは、取り付け軸12によって走行体5に取り付けられた状態において、この取り付け軸12を中心として走行体5に対して回転することができる。
【0021】
舵角検出手段取り付け基板13は、後述する舵角検出手段15が設けられる基板である。この舵角検出手段取り付け基板13には、前記取り付け軸12を遊挿可能な貫通孔131が形成されており、本発明の実施形態にかかる一方の自動走行装置1aのフレーム11に対して回転可能に取り付けられる。また、この舵角検出手段取り付け基板13は、本発明の実施形態にかかる一方の自動走行装置1aが走行体5に組み付けられた状態において、走行体5に固定される。
【0022】
角部としての操舵突起14は、本発明の実施形態にかかる一方の自動走行装置1aが、牽引体に引っ張られて走行している際に、障害物などに接触した場合に、本発明の実施形態にかかる一方の自動走行装置1aの走行方向を変更するためのものである。操舵突起14は、具体的には、フレーム11から進行方向前方に向かって突出する突起であり、前面から見た場合において、たとえば、走行体5の外側に位置するように設けられる。他方の自動走行装置1bにも、角部としての操舵突起14が走行体5の外側に位置するように設けられる。換言すると、一組の自動走行装置1a、1bには、左右対称となるように、一本ずつの操舵突起14が設けられる。
【0023】
舵角検出手段15は、舵角が所定の角度を超えたか否かを検出することができる。ここで、「舵角(回転角度)」とは、走行体5の進行しようとする方向(換言すると、舵角検出手段取り付け基板13は走行体5に固定されているので、舵角検出手段取り付け基板13の向き)と、本発明の実施形態にかかる自動走行装置1a、1bが進行しようとする方向との間の角度(回転角度)をいうものとする。
【0024】
舵角検出手段15には、発光手段151と受光手段152と舵角検出突起111の組合せが適用できる。具体的な構成は次のとおりである。舵角検出手段取り付け基板13は、取り付け軸12を遊挿可能な貫通孔(取り付け孔)131が形成されており、この取り付け軸12を中心として回転可能に配設される。そして、この舵角検出手段取り付け基板13には、この取り付け孔131に略同心の円弧状かつスリット状の貫通孔132が、この取り付け孔131を囲むように形成される。
【0025】
そして、この舵角検出手段取り付け基板13の所定の位置に、この円弧状の貫通孔132を挟んで、発光手段151と受光手段152とが対向するように設けられる。すなわち、発光手段が151発する光を、受光手段152が受光することができるように構成される。
【0026】
一方、フレーム11には、この円弧状の貫通孔132に遊挿可能な舵角検出突起111が設けられている。この舵角検出突起111は、取り付け軸12の軸線方向に略平行に突出する突起である。そして、舵角検出手段取り付け基板13がフレーム11に組み付けられた状態において、この舵角検出突起111は、前記円弧状の貫通孔132を貫通して、上面側に突出する。
【0027】
このような構成によれば、フレーム11と舵角検出手段取り付け基板13とが取り付け軸12を中心として相対的に回転すると、舵角検出突起111が前記円弧状の貫通孔132をスライドするように相対的に回転移動することができる。そして、ある所定の角度において、舵角検出突起111が発光手段151と受光手段152との間に位置することになる。
【0028】
そうすると、発光手段151が発する光が舵角検出突起111により遮られ、受光手段152は、発光手段151が発する光を受光することができなくなる。このように、受光手段152が発光手段151の発する光を受光しなくなることをもって、フレーム11と舵角検出手段取り付け基板13(すなわち走行体5)とが所定の角度関係になったことを検出できる。
【0029】
なお、発光手段151、受光手段152ともに、公知の各種発光手段、受光手段を適用することができる。たとえば発光手段151には、発光ダイオードなどが適用できる。たとえば受光手段152には、フォトダイオードやフォトトランジスタなどが適用できる。
【0030】
このほか、舵角検出手段15には、磁石とホールICとの組合せが適用できる。具体的な構成は次のとおりである。
【0031】
舵角検出手段取り付け基板13は、取り付け軸12を遊挿可能な貫通孔(取り付け孔)131が形成されており、この取り付け軸12を中心として回転可能に配設される。そして、この舵角検出手段取り付け基板13には、この取り付け孔131に略同心の円弧状かつスリット状の貫通孔132が、この取り付け孔12を囲むように形成される。
【0032】
そして、この円弧状の貫通孔132ぎわの所定の位置に、ホールICが設けられる。
【0033】
一方、フレーム11には、この円弧状の貫通孔132に遊挿可能な舵角検出突起111が設けられている。この舵角検出突起111は、取り付け軸12の軸線方向に略平行に突出する突起である。この舵角検出突起111は、舵角検出手段取り付け基板13がフレーム11に組み付けられた状態において、前記円弧状の貫通孔132を貫通して、上面側に突出する。そして、この舵角検出突起111の上面側に突出した部分には、磁石が設けられる。
【0034】
このような構成によれば、フレーム11と舵角検出手段取り付け基板13とが取り付け軸12を中心として相対的に回転すると、舵角検出突起111が前記円弧状の貫通孔132をスライドするように相対的に回転移動することができる。そして、ある所定の角度において、舵角検出突起111に設けられる磁石がホールICの近傍に位置することになる。そうすると、磁石が発する磁界をホールICが検出する。
【0035】
このように、ホールICが、舵角検出突起111に設けられる磁石が発する磁界を検知することによって、フレーム11と舵角検出手段取り付け基板13(すなわち走行体5)とが所定の角度関係になったことを検出できる。
【0036】
なお、本発明の実施形態にかかる一方の自動走行装置1aにおいては、舵角検出手段取り付け基板13を用いる構成を示したが、必ずしも舵角検出手段取り付け基板13は必要ではない。すなわち、走行体5に舵角検出突起111が遊挿する円弧状の貫通孔が形成されるとともに、走行体5に舵角検出手段15を設ける構成であってもよい。また、舵角検出手段15は、一組の自動走行装置1a、1bのうちの一方が備えればよい。すなわち、一組の自動走行装置1a、1bの両方が備える必要はない。本発明の実施形態においては、一方の自動走行装置1aが舵角検出手段15を備える構成を示しているが、他方の自動走行装置1bが備える構成であってもよい。
【0037】
回転動力源16には、公知の各種電動機(モータ)が適用できる。そして回転動力源16が発する回転動力は、歯車輪列17を介して出力部(すなわち駆動輪18)に伝達される。走行体5は、このようにして、牽引体により牽引される力に加えて、駆動輪18の回転によって、走行することができる。
【0038】
歯車輪列17の具体的な構成は特に限定されるものではなく、回転動力源16が発する回転動力を、駆動輪18に伝達できる構成であればよい。たとえば図3(特に図3(b))に基づいて説明すると、本発明の実施形態にかかる自動走行装置は、回転駆動源16と、第一の歯車171と、第二の歯車172と、第三の歯車173と、第四の歯車174と、第五の歯車175と、第六の歯車176と、駆動輪18とを備える
【0039】
第一の歯車171は回転駆動源16の駆動軸に嵌合される。第二の歯車172は第一の歯車171と噛合する。第三の歯車173は第二の歯車172に同軸に設けられるとともに、第二の歯車172と一体に回転するように構成される。第四の歯車174は第三の歯車173に噛合し、第五の歯車175は第四の歯車174に噛合する。第六の歯車176は第五の歯車175に噛合するとともに、駆動輪18に同軸に配設される。そしてこの駆動輪18は第六の歯車176と一体に回転するように構成される。
【0040】
負荷検出手段(図略)は、回転動力源に掛かる負荷が所定の値以上であるかどうかを検出する。負荷検出手段には、たとえば、エンコーダを用いた速度監視をするものや、モータの電流の上昇度合を監視するものが適用できる。
【0041】
このような構成によれば、回転駆動源16の回転動力を駆動輪18に伝達することができる。これによって、走行体5は、牽引体の牽引力に加えて、駆動輪18の回転により走行することができる。また、舵角検出手段取り付け基板13とフレーム11(すなわち本発明の実施形態にかかる自動走行装置1a、1bの進行方向)との角度が所定の値以上になったか、および回転動力源(モータ)16に掛かる負荷が所定の値以上になったかを検出することができる。
【0042】
図4は、本発明の実施形態にかかる自動走行装置の構成を模式的に示したブロック図である。図4に示すように、本発明の実施形態にかかる一方の自動走行装置1aは、負荷検出手段19と、舵角検出手段15と、判定手段20と、回転動力源制御手段21と、回転動力源16とを備える。
【0043】
前記のとおり負荷検出手段19は、回転動力源(モータ)16に掛かる負荷が所定の値以上になったか否かを検出することができる。また、舵角検出手段15は、舵角が所定の値以上になったか否かを検出することができる。判定手段20は、負荷検出手段19と舵角検出手段15の検出結果に基づいて、回転動力源制御手段21を制御する。回転動力源制御手段21は、判定手段20の判定結果に基づいて、回転動力源(モータ)16の正回転と逆回転を切り替えることにより、前進から後退に走行方向の切り替えを行うことができる。
【0044】
すなわち、判定手段20により、回転動力源(モータ)16に掛かる負荷が所定の値以上であり、かつ舵角が所定の値以上になったと判定された場合には、回転動力源制御手段21を介して回転動力源(モータ)16の正回転と逆回転を切り替えることにより、前進から後退に走行方向の切り替えを行うことができる。
【0045】
次に、このような構成を有する自動走行装置1a、1bおよびこの自動走行装置1a、1bを有する走行体5の動作について説明する。図5は、本発明の実施形態にかかる自動走行装置1の動作を示したフローチャートである。
【0046】
自動走行装置1a、1bおよび走行体5が「正常な走行状態」にある場合においては、回転動力源(モータ)16は正回転をしている(ステップS1−1)。ここで「正常な走行状態」とは、走行体5(すなわち舵角検出手段取り付け基板13)と自動走行装置1a、1bとの角度が、所定の値以下であるとともに、回転動力源(モータ)16に掛かる負荷が所定の値以下であり、かつ、本発明の実施形態にかかる自動走行装置1a、1bが走行体5の走行をアシストしている状態をいう。
【0047】
そして、負荷検出手段19は、回転動力源(モータ)16に掛かる負荷が所定の値以上になったか否かを、継続的に検出している(ステップS1−2)。回転動力源(モータ)16に掛かる負荷が所定の値以下であれば、ステップS1−1に戻り、ステップS1−1とステップS1−2の動作を継続する。
【0048】
走行体5が障害物などに接触するなどして、回転動力源(モータ)16に掛かる負荷が所定の値以上になった場合には(ステップS1−2において「Yes」)、舵角検出手段15は、本発明の実施形態にかかる自動走行装置1と走行体5との舵角が所定の値以上になっているか否かを判定する(ステップS1−3)。
【0049】
回転動力源(モータ)16に掛かる負荷が所定の値以上であっても(ステップS1−2において「Yes」)、舵角が所定の値以上でなければ(ステップS1−3において「No」)、ステップS1−2に戻る。そして回転動力源(モータ)16は正回転を続け、回転動力源(モータ)16の正回転により障害物などを乗りこえる。
【0050】
一方、回転動力源(モータ)16に掛かる負荷が所定の値以上であって(ステップS1−2において「Yes」)、かつ舵角が所定の値以上(ステップS1−3において「Yes」)となった場合には、ステップS1−4において、所定の時間だけ回転動力源(モータ)16を逆回転させる。これにより走行体5は後退し、障害物等から離れる。
【0051】
そして所定の時間が経過するまで回転動力源(モータ)16の逆回転を継続し(ステップS1−5において「No」)、所定の時間だけ逆回転したら(ステップS1−5において「Yes」)、ステップS1−1に戻り、回転動力源(モータ)16を正回転させる。
【0052】
このような動作によれば、走行体が障害物等にぶつかった場合であっても、回転動力源(モータ)16に掛かる負荷が所定の値以上になった場合で、かつ舵角が所定の値以上になった場合にのみ走行体5は後退して障害物等を回避する。これに対して、回転動力源(モータ)16に掛かる負荷が所定の値以上になった場合であっても、舵角が所定の値以下であれば、当該障害物を乗りこえることができると判断して、走行体5は後退しない。また、舵角が所定の値以上になった場合であっても、モータに掛かる負荷が所定の値以上にならなければ、走行体5は後退しない。このように、本発明の実施形態にかかる自動走行装置1a、1bは、これを備える走行体5が障害物等に接触等した場合であっても、操作者の意思に近い動作をすることができる。
【図面の簡単な説明】
【0053】
【図1】本発明の実施形態にかかる自動走行装置を備える走行体の構成を模式的に示した平面図であり、(a)は下方から見た図、(b)は前方から見た図、(c)は側面から見た図である。
【図2】本発明の実施形態にかかる自動走行装置の構成を模式的に示した平面図であり、(a)は上方から見た図、(b)は側方から見た図である。
【図3】本発明の実施形態にかかる自動走行装置の構成を模式的に示した外観斜視図であり、(a)は斜め上方から見た図、(b)は斜め下方から見た図である。
【図4】本発明の実施形態にかかる自動走行装置の構成を模式的に示したブロック図である。
【図5】本発明の実施形態にかかる自動走行装置の動作を示したフローチャートである。
【符号の説明】
【0054】
1a、1b 自動走行装置
11 フレーム
111 舵角検出突起
12 取り付け軸
13 舵角検出手段取り付け基板
131 取り付け軸用貫通孔
132 舵角検出手段用貫通孔
14 操舵突起
15 舵角検出手段
151 発光手段
152 受光手段
16 回転動力源
17 歯車輪列
171 第一の歯車
172 第二の歯車
173 第三の歯車
174 第四の歯車
175 第五の歯車
176 第六の歯車
18 駆動輪
19 負荷検出手段
20 判定手段
21 回転動力源制御手段
5 走行体
51 後輪
52 連結部
【特許請求の範囲】
【請求項1】
駆動源と該駆動源により駆動される出力部とを有し、該出力部の駆動によって走行体を自動的に走行させるとともに前記走行体に回転可能に固定された自動走行装置において、
前記駆動源として用いたモータの負荷が所定値以上で、かつ前記走行体に対する回転角度が所定値以上のときに前記出力部を正回転から逆回転に切り替えることによって、前記走行体を前進から後退に走行方向の切換を行うことを特徴とする自動走行装置。
【請求項2】
前記走行体に対する回転角度を検出するため、前記走行体に一方側が固定された検出手段の他方側が固定されたことを特徴とする請求項1に記載の自動走行装置。
【請求項3】
前記走行体は走行方向前方側から引っ張り手段によって引っ張られるように構成され、
前記走行体に走行方向後方に配設された後輪より前方に配設されるとともに、前記走行体に走行方向前方に突出した角部障害物に衝突したのち、前記引っ張り手段により引っ張られて前記走行体に対する角度が変化することを特徴とする自動走行装置。
【請求項1】
駆動源と該駆動源により駆動される出力部とを有し、該出力部の駆動によって走行体を自動的に走行させるとともに前記走行体に回転可能に固定された自動走行装置において、
前記駆動源として用いたモータの負荷が所定値以上で、かつ前記走行体に対する回転角度が所定値以上のときに前記出力部を正回転から逆回転に切り替えることによって、前記走行体を前進から後退に走行方向の切換を行うことを特徴とする自動走行装置。
【請求項2】
前記走行体に対する回転角度を検出するため、前記走行体に一方側が固定された検出手段の他方側が固定されたことを特徴とする請求項1に記載の自動走行装置。
【請求項3】
前記走行体は走行方向前方側から引っ張り手段によって引っ張られるように構成され、
前記走行体に走行方向後方に配設された後輪より前方に配設されるとともに、前記走行体に走行方向前方に突出した角部障害物に衝突したのち、前記引っ張り手段により引っ張られて前記走行体に対する角度が変化することを特徴とする自動走行装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2009−82431(P2009−82431A)
【公開日】平成21年4月23日(2009.4.23)
【国際特許分類】
【出願番号】特願2007−255899(P2007−255899)
【出願日】平成19年9月28日(2007.9.28)
【出願人】(000002233)日本電産サンキョー株式会社 (1,337)
【Fターム(参考)】
【公開日】平成21年4月23日(2009.4.23)
【国際特許分類】
【出願日】平成19年9月28日(2007.9.28)
【出願人】(000002233)日本電産サンキョー株式会社 (1,337)
【Fターム(参考)】
[ Back to top ]