
自動車の後輪の回転角を制御する方法と装置
本発明は、制御規則の実行手段(4)、及び前記法則から得られる後輪回転角指令に応答し、前記指令を自動的に制御する手段(5)を備える装置に関する。本発明の装置は、更に、制御法則の入力変数(SWA_n、VS_n、VSS_n)を表わす信号であって、前記変数の1つの現在値のエラーを示す信号をモニタリングし、変数の前の信頼性のある値(SWA-_-nm1;VS_nm1;VSS_nm1)により前記現在値を置換する手段(6)を備える。エラーが持続する場合、制御法則は、後輪回転角の安全な演算モードにより置換される。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、操舵角がステアリングホイールによって設定される操舵される前輪のフロントアクスルと、操舵される後輪のリアアクスルとを備える自動車の、操舵される後輪の操舵角を制御する方法に関する。本方法では、前記後輪の操舵角が、少なくともステアリングホイールの回転角度と車両速度とを含む入力変数の関数である制御法則から得られる。本発明はまた、この方法を実行するための装置に関する。本発明はまた、このような装置を装備した自動車に関する。
【背景技術】
【0002】
このような方法と装置は、2003年12月18日出願の、本出願人による特許文献1に既知である。これにより、「四輪操舵」式と言われる種類の自動車の後輪の操舵角の制御が提供される。この方式の自動車のシャーシは、車両の運転者がステアリングホイールを回すことにより操舵角が決定される2つの前輪を備えるアクスルと、制御法則を実行することにより、少なくとも前輪の操舵角及び車両速度の関数として後輪の操舵角を制御するように適切にプログラムされたコンピュータにより制御される、例えば電気モータのようなアクチュエータにより操舵角が決定される2つの後輪を備えるアクスルとにより支持される。
制御法則のこれらの入力変数が誤った値を採る場合、制御法則を使用して決定される後輪の操舵角指令の値もエラーとなる。最悪の場合には、運転者が車両のコントロールを失う可能性があり、従って運転者及びその他乗員にとって危険な状況が発生する。よって、このような危険を排除できる手段を配備することが適切である。
【特許文献1】仏国特許出願第2864001号
【発明の開示】
【発明が解決しようとする課題】
【0003】
明確には、本発明の目的は、上述のような制御方法の安全性を向上させる手段を提供することである。
本発明の別の目的は、上記のようなより安全な制御方法を、特に本方法で使用する制御法則の入力変数を表わす信号を分配する信号分配バスを備えるローカル通信ネットワークを装備する自動車のために提供することである。
【課題を解決するための手段】
【0004】
本発明のこのような目的、及び後述で明らかになるその他の目的は、ステアリングホイールによって操舵角が決定される操舵対象の前輪のフロントアクスルと、操舵対象の後輪のリアアクスルとを備えた自動車の後輪の操舵角を制御する方法によって達成され、この場合、後輪の操舵角は、少なくとも前記ステアリングホイールの回転角及び車両速度よりなる入力変数の関数である制御法則から得られる。本方法は、入力変数の少なくとも1つのエラー値の発生を検出すること、及び、次いで当該変数の前の信頼性のある値を用いてこの値を置換することを特徴とする。
このように、現在のエラー値を、問題の変数の実際の現在値を真に表わすことができる妥当且つ直前の値で置換することにより、制御法則は、検出されたエラーの影響を受けない後輪操舵角の正確な値を生成することができる。
【0005】
本発明の他の特徴は以下の通りである。
−エラー値の生成が所定の期間より長い一定期間に亘って持続する場合、制御法則によって規定される後輪操舵角の計算方法を、もっと安全な該角計算方法で置換する。
−より安全な計算方法は、後輪操舵角を徐々にゼロに戻す。
−本方法は、少なくとも前記入力変数を、サンプリングされたデジタルデータの形式で分配するバスを備えるローカル通信ネットワーク搭載車両に採用される。デジタルデータの1つの現在のサンプルにエラー値を検出したら、このサンプルを、データの信頼性のある前のサンプルで置換し、制御法則を使用して後輪操舵角を計算する。
−前記バス上で使用可能なデータの現在のサンプルの値を、それが無効であること又はそれがバス上に存在しないことを示す値と比較し、その結果として前記無効性又は前記不在を示すフラッグの値を設定する。
−サンプリング期間に亘って車両速度の勾配を測定し、この勾配を、同勾配の所定の制限値と比較し、その結果、この制限値を超えている場合にそのことを示すフラッグの値を設定する。
−ステアリングホイールの回転角度の勾配を測定し、この勾配を、同勾配の所定の制限値と比較し、その結果、この制限値を超えている場合にそのことを示すフラッグの値を設定する。
−勾配の測定時刻を定める。
−車両の進行方向からなる入力変数の1つを用いて、前記バスから読み取られるこの変数と、前進ギヤ、リバースギヤ又は停止状態に入っている車両の状態との一貫性をチェックし、その結果この変数の現在のサンプルにエラーがある場合にそれを示すフラッグの値を設定する。
−上記フラッグのいずれか1つが、所定の期間を超える期間に亘って関連する入力変数にエラーを示したままである場合、その間の後輪操舵角の計算により安全な計算方法を使用する。
【0006】
本発明による方法を実行するため、本方法は、制御法則の実行手段、及び前記法則から得られる後輪操舵角指令を受けて、この角度を指令された値に変更する手段を備えた装置を提供する。本装置は、制御法則の入力値を表わす信号であって、入力変数のいずれか1つの現在値のエラーを示すことができる信号をモニタリングし、この現在値を同変数の信頼性のある前の値で置換する手段を備えることを特徴とする。
【0007】
本装置の他の特徴は以下の通りである。
−制御法則の実行手段は、後輪操舵角のより安全な計算方法の実行手段を含む。
−本装置はまた、信号のモニタリング手段によるエラーの検出、及び車両の速度及び進行方向に関してモニタリング手段により送達されるより安全な信号を受けて、停止状態、前進ギヤ又はリバースギヤに入っている車両の状態に関する信頼性のある情報を、制御法則実行手段に送達し、よって制御法則実行手段がこの法則を適切に選択することを可能にする、状態管理手段を備える。
−この情報はモニタリング手段にも送達され、このモニタリング手段は、車両の進行方向に関する変数の、前記情報との一貫性をチェックする手段を含む。
本発明の更なる特徴及び利点は、後述の説明及び添付図面により明らかとなる。
【実施例】
【0008】
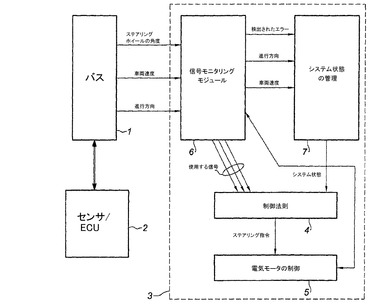
添付図面の図1では、本発明の好ましい一実施形態により、自動車の最近の設計に広く組み込まれているCANネットワークのような、ローカルデータ通信ネットワークを装備した自動車に、本発明が実装されている。このようなネットワークの特徴は、参照番号2でまとめて示される様々なセンサ及びコンピュータを相互接続するバス1を備えていることである。周知のように、センサはコンピュータ(電子制御ユニットECUとしても知られる)に対し、変数を表わすサンプリングされたデジタル信号を供給し、当該変数は、これらのコンピュータにより、車両の動力装置、サスペンション、又はアンチロック制動システム等の車両の機能的アセンブリの管理に用いられる。
本発明による装置は、デジタルコンピュータ3の形態でこのようなシステムに組み込まれる。当該コンピュータは、専用のものとしてもよく、車両の他のアセンブリと共用してもよい。このコンピュータは、後輪の操舵角を制御する1以上の制御法則4を実行するように適切にプログラムされている。これに関し、前記特許文献1を参照し、本発明に使用できる制御法則の特徴に対する理解を深めることができる。当然のことながら、このような参照は、説明のみを目的としており、非限定的な例示にすぎない。
【0009】
ステアリング指令は制御法則から得られ、車両の後輪の操舵角を指令された角度の値に機械的に設定する機能を有するアクチュエータ(図示しない)を制御するために、制御手段5に送達される。上述のように、このようなアクチュエータは、位置及び/又は電力の観点から制御される電気モータから構成することができる。
制御法則4の入力変数のサンプリングされた現在のデジタル値を表わすバス信号を捕捉するために、コンピュータ3はバス1に接続されている。上述のように、これらの変数は、少なくともステアリングホイールの回転角と車両速度とを含む。これらの変数は、従来技術に既知の測定又は計算手段によりバスに入力される。本発明では、有利には、これらの変数は車両の進行方向を含む。この変数は、車両が前進ギヤ、リバースギヤ、及び停止状態のいずれに入っているかに応じて3つの異なる値を採る。この情報は、車両が前進ギヤ、及びリバースギヤのいずれで走行しているか、或いは、場合によっては低速又は高速で前進しているかにも応じて、異なってパラメータ化される制御法則を起動させることができる。
【0010】
本発明の1つの特徴によれば、バス1上で得られる、操舵角、車両速度及び車両の進行方向を表わす信号はそれぞれ、まず信号モニタリングモジュール6で処理され、その後後輪操舵角を制御するために制御法則実行手段4に渡される。これらの信号に適用される処理工程は、図3ないし5を参照して後述で詳しく説明する。
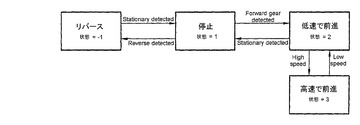
また、図1に示すように、信号処理モジュール6は、本発明による装置を搭載した車両のシステムの「状態管理モジュール」として知られるモジュール7に対し、進行方向及び車両速度に関する情報を送達し、また同モジュールに対し、このモジュールで処理された信号に検出された全てのエラーを示す。図2のブロック図は、モジュール7の機能を詳細に示している。モジュール7は、車両の現在の動作状態、すなわち、車両がリバースギヤに入っているか(状態=−1)、停止状態に入っているか(状態=1)、低速の前進ギヤに入っているか(状態=2)又は高速の前進ギヤに入っているか(状態=3)を特定する。供給された信号を使用して、これら様々な状態間の移行を検出する。このような移行は、図2に、検出される移行を識別する矢印、Stationary_detected, Forward gear_detected, Reverse gear_detected, High speed, Low speedで示される。
【0011】
モジュール7は、このような状態情報を、制御法則4の実行手段4、電気モータの制御手段5、及び信号モニタリングモジュール6に送達する。この状態情報により、手段4は、検出された状態に適した制御法則を選択することができる。よって、後輪操舵角の制御には、前進ギヤとリバースギヤとで、更には低速前進と高速前進とで、異なる方針を採用することができる。後述するように、適用可能な制御法則のこれら入力変数の少なくとも1つに持続性のエラーが検出される場合、実行手段4により、「グレードの低い」方法であるが、安全性の高い後輪操舵角計算方法が選択される。
図5に詳細に示すように、モジュール7によって送達される状態情報は信号モニタリングモジュール6によっても利用され、モジュール6は、バス1によって送達される車両の進行方向に関する信号の変化の一貫性をチェックする。このようなチェックで、この情報に含まれるエラーを検出することにより情報の信頼性を高めることができ、このエラーは、変化がシステムの状態と一致しない場合に検出される。
【0012】
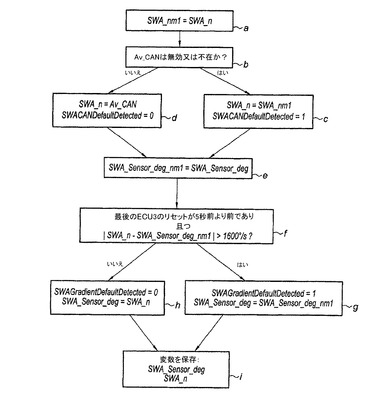
次に、図3のフロー図を参照し、信号処理モジュールが、バス1上で読み取られるステアリングホイール角の値の現在のサンプルに発生するエラーを検出し、よってこのエラーを補正又は補償するために適用する方針のステップを詳細に説明する。
ステアリングホイールの角度に関する変数Av_CANの現在の各サンプルSWA_nがCANネットワークのバス1に現れる度に(ステップa)、モジュール6はこのサンプルを、この変数に関してバス上で利用可能な情報の不在又は無効性を示す値と比較する(ステップb)。この試験の結果がポジティブであれば、次いで「フラッグ」SWACANDefault_Detectedを1に設定し、現在のサンプルSWA_nを、ランク(n−1)の直前のサンプル、即ちSWA_nm1で置き換える(ステップc)。結果がネガティブである場合、サンプルSWA_nは、バスで読み取られた通りにステアリングホイール角Av_CANを表わすのに妥当であり、前記フラッグが0に設定又は確認される(ステップd)。
【0013】
ステアリングホイール角センサによって検出された、「度」で表現されるステアリングホイール角の値は、SWA_sensor_degと呼ばれ、コンピュータ3の他のブロックで使用される。ステップeにおいて、この値は、この値のランクnm1の前のサンプルの値と等しくされる。
このように直前のサンプルを使用することは、ステアリングホイール角が、ステアリングホイール角センサによって送達される信号のサンプリング周波数の周期(通常10m秒のオーダー)に亘ってゆっくりと変化するので、正常な車両走行状態の下で完全に合理的である。
【0014】
付随的に、ステアリングホイール角は1600°/秒を超える速さで変化できないことが実験的に確立された。従って、この値が範囲を逸脱することは、この角度の測定にエラーがあることを意味する。ステップfにおいて、サンプリングの瞬間nm1とnとの間におけるステアリングホイール角の変化の勾配又は割合の絶対値を、最大値と考えられる制限値と比較することにより、この妥当性条件を試験する。上記のようにサンプリング周期を10m秒とすると、この制限値は16°、即ち1600°/秒である。勾配の測定時刻を定め、例えばコンピュータ3の最後のゼロ化(リセット)から5秒毎とすることにより、コンピュータのウォーミングアップ及び初期化の間にこの制限値を超える勾配を検出することを回避する。これは、ウォーミングアップ及び初期化の段階では、コンピュータの状態が変化していることに起因して値が急激に変化するため、エラーの誤検出が起こり易いためである。
この制限値を超えていた場合、フラッグSWAGradientDefaultDetectedを1に設定し、ステアリングホイール角のランクnm1の前のサンプルSWA_Sensor_degを次のブロックで使用する(ステップg)。制限値を超えていない場合、このフラッグを0に維持し、バスで使用可能な現在のサンプルSWA_nを次の計算に使用する(ステップh)。ステップiでは、SWA_Sensor_degの値が保存され、その後、制御法則を実行する実行手段4により値SWA_nと共に使用される。
【0015】
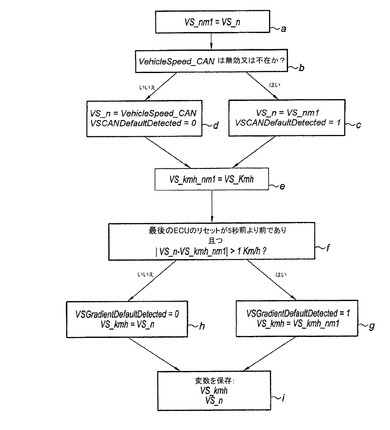
次に図4のフロー図を参照し、車両速度の測定値のエラーを検出し、このエラーを補正又は補償する処理のステップを詳細に説明する。偶然にも、この処理は、ステアリングホイール角に関して図3を参照して上記に説明した処理と非常に類似している。
車両速度の現在値VehicleSpeed_CANのサンプルVS_nがCANネットワークのバス1に現れる度に(ステップa)、モジュール6は、このサンプルを、このサンプルの不在又は無効性を表わす値と比較する(ステップb)。この試験の結果がポジティブであれば、「フラッグ」VSCANDefault_Detectedを1に設定して、現在のサンプルVS_nを直前のサンプルVS_nm1で置換する(ステップc)。ネガティブである場合、サンプルVS_nは、バスで読み取られた通りに車両速度VehicleSpeed_CANを表わすのに妥当であり、前記フラッグが0に設定又は確認される(ステップd)。
【0016】
この測定に適したセンサにより検出され、コンピュータ3の他のブロックで使用される車両速度の値(kmh)をVS_kmhとする。ステップeでは、この値を、この値のランクnm1の前のサンプルの値と等しくする。
このような置換は、サンプリング期間(この場合20m秒に設定)の間は通常、車両速度に殆ど変化がないので、ステアリングホイール角に関して上述したものと同様の観察により合理的である。
【0017】
付随的に、実験によって、車両速度は20m秒の間に1kmhを超える変化を示さないということを確認することができた。この値の範囲の逸脱は、この速度の検出にエラーがあることを意味する。ステップfにおいて、この制限値を、サンプリングの瞬間nm1とnの間における速度の変化の勾配又は割合の絶対値と比較することにより、この妥当性条件を試験する。勾配の測定時刻を定め、例えばコンピュータ3の最後のゼロ化(リセット)から5秒毎とする。
この制限値を超えていた場合、フラッグVSGradientDefaultDetectedを1に設定し、速度のランクnm1の前のサンプルVS_kmh_nm1をコンピュータの他のブロックで使用する(ステップg)。制限値を超えていない場合、このフラッグを0に維持し、バス上で使用可能な現在のサンプルVS_nを次の計算に使用する(ステップh)。ステップiでは、次に、制御法則を実行する実行手段4により、VS_nとともにVS_kmhの値が使用される。
【0018】
次に図5のフロー図を参照し、エラー検出及びバス1で利用可能な車両の進行方向に関する情報の修正の処理について説明する。
この態様においては、信頼性のある情報を有することが必須である。これは、車両が前進しているか、後進しているかによって後輪の操舵角の制御方針が大きく異なるためである。車両速度が非ゼロであるとき、「進行方向」に関する情報が、前進ギヤに対応する値からリバースギヤに対応する値へと、突然且つ誤って切り換わると、後輪操舵角の値を計算するために2つの異なる制御法則が交代で呼び出されるため、後輪の操舵角指令も現在の値から明らかに異なる値へと急激に変化する。続いて発生する後輪操舵角の急激な変化により、車両の運転者が困難な状況に陥いる危険がある。
【0019】
このような危険を防ぐため、本発明によれば、システムの状態管理モジュール7は、このシステムの状態に関する情報を信号モニタリングモジュール6へと送達し、よってモジュール6は、「進行方向」情報の値と、モジュール6により決定される信号の状態の変化との一貫性を確認することができる。
図2に示す状態の線図では、実際に、低速又は高速での前進ギヤでの動作モードから、リバースギヤでの動作モードに切換えるために、システムは「停止」状態を通過しなくてはならないことが分かる。モジュール6が受信する「進行方向」情報は、モジュール7によって確立されるシステムの状態と、変化も含めて常に一貫性を有しなければならない。
【0020】
図5のフロー図は、この一貫性を確認する処理を説明したものである。
第一に、ステアリングホイール角及び車両速度の場合と同じように、バス上で読み取られた進行方向に関する情報VSS_nが不在であるか、又は無効であることを表わす値を採る場合、VSSCANDefaultDetectedフラッグを1に設定する。そうでない場合、当該フラッグを0に設定する(ステップa〜dを参照)。状況に応じて、サンプルVSS_nm1又はVSS_nをDirectionOfTravel__CAN情報として採用し、その後バス上で読み取ることができる車両の進行方向を表わす情報として使用する。
【0021】
次いで、モジュール7によって送達される状態に関する情報と、バスによって送達されるDirectionOfTravel_CAN情報によって供給される情報との一貫性または不一致を、車両に可能な3つの状態(前進ギヤ、リバースギヤ、停止状態)において試験する。
このように、ステップeでは、状態管理モジュール7により観察したところ、システムがリバースギヤに関連する状態−1にあるのに対し、DirectionOfTravel_CAN情報が前進ギヤを示す状況の出現を探す。そのような状況が検出されたら、VehicleSpeedSignFaultDetectedフラッグを1に設定する(ステップf)。このような状況が無ければ、このフラッグを0に維持し、処理はステップgに進んで、モジュール7によってコード化された車両の状態(図2参照)が2以上(車両が低速又は高速で前進している)であるのに対し、DirectionOfTravel_CAN情報がリバースギヤを示唆する状況を探す。このような状況が出現したら、VehicleSpeedSignFaultDetectedフラッグを1に設定する(ステップh)。このような状況が無ければ、このフラッグを0に維持し、処理は、車両の現在の速度に関する情報VS_kmhが、この速度が比較的低い閾値である例えば20km/時以上であることから非ゼロの値を示すのに対し、DirectionOfTravel_CANによって車両が停止していることが示唆される状況へと進む(ステップi)。このような状況が出現したら、前記フラッグを1に切換え(ステップj)、このような状況が無ければゼロに維持する(ステップk)。
【0022】
これら3つの一貫性試験を実行した後、車両の進行方向を表わす変数を残りの計算のために保存する。この値は、図5のフロー図のステップc及びdに関連して上述したVSS_n又はVSS_nm1に等しい。
このように、モジュール6によって有効化された後輪操舵角を制御するための制御法則のこれら3つの入力変数は、これらの法則を実行する手段4によって使用され、よって第1に適用される法則が選択され、第2にこの法則が実際に実行される。
【0023】
これに関して、本発明の別の特徴によれば、上記フラッグのいずれか1つが、異常に長いと思われる期間に亘り(例えば50m秒)1に維持され、よって制御法則の入力変数の少なくとも1つに、この法則を使用して計算される操舵角の値にエラーを生じさせる恐れのある持続的なエラーがあることが示唆される場合、「グレードの低い」方法であるが安全性の高い操舵角計算方法を、これらの制御法則の代わりに使用する。グレードの低いこの方法は、この操舵角を徐々にゼロに戻す。このように、この角度の値を調節することにより通常得られる利点は、一時的には失われるが、このような損失は、車両の安全性が向上することで補償される。
【0024】
以上の説明により、本発明が、後輪操舵角の計算に使用される入力変数の1つ以上に瞬間的なエラーが生じる場合、当該角度の計算の安全性を高め、更に、これらの変数に持続的なエラーが生じる場合に車両の動作の安全性を高めることが明らかである。
【図面の簡単な説明】
【0025】
【図1】本発明による、後輪の操舵角を制御するための装置のブロック図である。
【図2】図1のブロック図の「状態管理モジュール」として知られるモジュールの機能線図である。
【図3】ステアリングホイールの回転角の現在値のエラーを検出して補正するプログラムのフロー図であり、本発明を例示する方法を示す。
【図4】車両速度の現在値のエラーを検出して補正するプログラムのフロー図であり、本発明を例示する方法を示す。
【図5】車両の進行方向の現在値のエラーを検出して補正するプログラムのフロー図であり、本発明を例示する方法を示す。
【技術分野】
【0001】
本発明は、操舵角がステアリングホイールによって設定される操舵される前輪のフロントアクスルと、操舵される後輪のリアアクスルとを備える自動車の、操舵される後輪の操舵角を制御する方法に関する。本方法では、前記後輪の操舵角が、少なくともステアリングホイールの回転角度と車両速度とを含む入力変数の関数である制御法則から得られる。本発明はまた、この方法を実行するための装置に関する。本発明はまた、このような装置を装備した自動車に関する。
【背景技術】
【0002】
このような方法と装置は、2003年12月18日出願の、本出願人による特許文献1に既知である。これにより、「四輪操舵」式と言われる種類の自動車の後輪の操舵角の制御が提供される。この方式の自動車のシャーシは、車両の運転者がステアリングホイールを回すことにより操舵角が決定される2つの前輪を備えるアクスルと、制御法則を実行することにより、少なくとも前輪の操舵角及び車両速度の関数として後輪の操舵角を制御するように適切にプログラムされたコンピュータにより制御される、例えば電気モータのようなアクチュエータにより操舵角が決定される2つの後輪を備えるアクスルとにより支持される。
制御法則のこれらの入力変数が誤った値を採る場合、制御法則を使用して決定される後輪の操舵角指令の値もエラーとなる。最悪の場合には、運転者が車両のコントロールを失う可能性があり、従って運転者及びその他乗員にとって危険な状況が発生する。よって、このような危険を排除できる手段を配備することが適切である。
【特許文献1】仏国特許出願第2864001号
【発明の開示】
【発明が解決しようとする課題】
【0003】
明確には、本発明の目的は、上述のような制御方法の安全性を向上させる手段を提供することである。
本発明の別の目的は、上記のようなより安全な制御方法を、特に本方法で使用する制御法則の入力変数を表わす信号を分配する信号分配バスを備えるローカル通信ネットワークを装備する自動車のために提供することである。
【課題を解決するための手段】
【0004】
本発明のこのような目的、及び後述で明らかになるその他の目的は、ステアリングホイールによって操舵角が決定される操舵対象の前輪のフロントアクスルと、操舵対象の後輪のリアアクスルとを備えた自動車の後輪の操舵角を制御する方法によって達成され、この場合、後輪の操舵角は、少なくとも前記ステアリングホイールの回転角及び車両速度よりなる入力変数の関数である制御法則から得られる。本方法は、入力変数の少なくとも1つのエラー値の発生を検出すること、及び、次いで当該変数の前の信頼性のある値を用いてこの値を置換することを特徴とする。
このように、現在のエラー値を、問題の変数の実際の現在値を真に表わすことができる妥当且つ直前の値で置換することにより、制御法則は、検出されたエラーの影響を受けない後輪操舵角の正確な値を生成することができる。
【0005】
本発明の他の特徴は以下の通りである。
−エラー値の生成が所定の期間より長い一定期間に亘って持続する場合、制御法則によって規定される後輪操舵角の計算方法を、もっと安全な該角計算方法で置換する。
−より安全な計算方法は、後輪操舵角を徐々にゼロに戻す。
−本方法は、少なくとも前記入力変数を、サンプリングされたデジタルデータの形式で分配するバスを備えるローカル通信ネットワーク搭載車両に採用される。デジタルデータの1つの現在のサンプルにエラー値を検出したら、このサンプルを、データの信頼性のある前のサンプルで置換し、制御法則を使用して後輪操舵角を計算する。
−前記バス上で使用可能なデータの現在のサンプルの値を、それが無効であること又はそれがバス上に存在しないことを示す値と比較し、その結果として前記無効性又は前記不在を示すフラッグの値を設定する。
−サンプリング期間に亘って車両速度の勾配を測定し、この勾配を、同勾配の所定の制限値と比較し、その結果、この制限値を超えている場合にそのことを示すフラッグの値を設定する。
−ステアリングホイールの回転角度の勾配を測定し、この勾配を、同勾配の所定の制限値と比較し、その結果、この制限値を超えている場合にそのことを示すフラッグの値を設定する。
−勾配の測定時刻を定める。
−車両の進行方向からなる入力変数の1つを用いて、前記バスから読み取られるこの変数と、前進ギヤ、リバースギヤ又は停止状態に入っている車両の状態との一貫性をチェックし、その結果この変数の現在のサンプルにエラーがある場合にそれを示すフラッグの値を設定する。
−上記フラッグのいずれか1つが、所定の期間を超える期間に亘って関連する入力変数にエラーを示したままである場合、その間の後輪操舵角の計算により安全な計算方法を使用する。
【0006】
本発明による方法を実行するため、本方法は、制御法則の実行手段、及び前記法則から得られる後輪操舵角指令を受けて、この角度を指令された値に変更する手段を備えた装置を提供する。本装置は、制御法則の入力値を表わす信号であって、入力変数のいずれか1つの現在値のエラーを示すことができる信号をモニタリングし、この現在値を同変数の信頼性のある前の値で置換する手段を備えることを特徴とする。
【0007】
本装置の他の特徴は以下の通りである。
−制御法則の実行手段は、後輪操舵角のより安全な計算方法の実行手段を含む。
−本装置はまた、信号のモニタリング手段によるエラーの検出、及び車両の速度及び進行方向に関してモニタリング手段により送達されるより安全な信号を受けて、停止状態、前進ギヤ又はリバースギヤに入っている車両の状態に関する信頼性のある情報を、制御法則実行手段に送達し、よって制御法則実行手段がこの法則を適切に選択することを可能にする、状態管理手段を備える。
−この情報はモニタリング手段にも送達され、このモニタリング手段は、車両の進行方向に関する変数の、前記情報との一貫性をチェックする手段を含む。
本発明の更なる特徴及び利点は、後述の説明及び添付図面により明らかとなる。
【実施例】
【0008】
添付図面の図1では、本発明の好ましい一実施形態により、自動車の最近の設計に広く組み込まれているCANネットワークのような、ローカルデータ通信ネットワークを装備した自動車に、本発明が実装されている。このようなネットワークの特徴は、参照番号2でまとめて示される様々なセンサ及びコンピュータを相互接続するバス1を備えていることである。周知のように、センサはコンピュータ(電子制御ユニットECUとしても知られる)に対し、変数を表わすサンプリングされたデジタル信号を供給し、当該変数は、これらのコンピュータにより、車両の動力装置、サスペンション、又はアンチロック制動システム等の車両の機能的アセンブリの管理に用いられる。
本発明による装置は、デジタルコンピュータ3の形態でこのようなシステムに組み込まれる。当該コンピュータは、専用のものとしてもよく、車両の他のアセンブリと共用してもよい。このコンピュータは、後輪の操舵角を制御する1以上の制御法則4を実行するように適切にプログラムされている。これに関し、前記特許文献1を参照し、本発明に使用できる制御法則の特徴に対する理解を深めることができる。当然のことながら、このような参照は、説明のみを目的としており、非限定的な例示にすぎない。
【0009】
ステアリング指令は制御法則から得られ、車両の後輪の操舵角を指令された角度の値に機械的に設定する機能を有するアクチュエータ(図示しない)を制御するために、制御手段5に送達される。上述のように、このようなアクチュエータは、位置及び/又は電力の観点から制御される電気モータから構成することができる。
制御法則4の入力変数のサンプリングされた現在のデジタル値を表わすバス信号を捕捉するために、コンピュータ3はバス1に接続されている。上述のように、これらの変数は、少なくともステアリングホイールの回転角と車両速度とを含む。これらの変数は、従来技術に既知の測定又は計算手段によりバスに入力される。本発明では、有利には、これらの変数は車両の進行方向を含む。この変数は、車両が前進ギヤ、リバースギヤ、及び停止状態のいずれに入っているかに応じて3つの異なる値を採る。この情報は、車両が前進ギヤ、及びリバースギヤのいずれで走行しているか、或いは、場合によっては低速又は高速で前進しているかにも応じて、異なってパラメータ化される制御法則を起動させることができる。
【0010】
本発明の1つの特徴によれば、バス1上で得られる、操舵角、車両速度及び車両の進行方向を表わす信号はそれぞれ、まず信号モニタリングモジュール6で処理され、その後後輪操舵角を制御するために制御法則実行手段4に渡される。これらの信号に適用される処理工程は、図3ないし5を参照して後述で詳しく説明する。
また、図1に示すように、信号処理モジュール6は、本発明による装置を搭載した車両のシステムの「状態管理モジュール」として知られるモジュール7に対し、進行方向及び車両速度に関する情報を送達し、また同モジュールに対し、このモジュールで処理された信号に検出された全てのエラーを示す。図2のブロック図は、モジュール7の機能を詳細に示している。モジュール7は、車両の現在の動作状態、すなわち、車両がリバースギヤに入っているか(状態=−1)、停止状態に入っているか(状態=1)、低速の前進ギヤに入っているか(状態=2)又は高速の前進ギヤに入っているか(状態=3)を特定する。供給された信号を使用して、これら様々な状態間の移行を検出する。このような移行は、図2に、検出される移行を識別する矢印、Stationary_detected, Forward gear_detected, Reverse gear_detected, High speed, Low speedで示される。
【0011】
モジュール7は、このような状態情報を、制御法則4の実行手段4、電気モータの制御手段5、及び信号モニタリングモジュール6に送達する。この状態情報により、手段4は、検出された状態に適した制御法則を選択することができる。よって、後輪操舵角の制御には、前進ギヤとリバースギヤとで、更には低速前進と高速前進とで、異なる方針を採用することができる。後述するように、適用可能な制御法則のこれら入力変数の少なくとも1つに持続性のエラーが検出される場合、実行手段4により、「グレードの低い」方法であるが、安全性の高い後輪操舵角計算方法が選択される。
図5に詳細に示すように、モジュール7によって送達される状態情報は信号モニタリングモジュール6によっても利用され、モジュール6は、バス1によって送達される車両の進行方向に関する信号の変化の一貫性をチェックする。このようなチェックで、この情報に含まれるエラーを検出することにより情報の信頼性を高めることができ、このエラーは、変化がシステムの状態と一致しない場合に検出される。
【0012】
次に、図3のフロー図を参照し、信号処理モジュールが、バス1上で読み取られるステアリングホイール角の値の現在のサンプルに発生するエラーを検出し、よってこのエラーを補正又は補償するために適用する方針のステップを詳細に説明する。
ステアリングホイールの角度に関する変数Av_CANの現在の各サンプルSWA_nがCANネットワークのバス1に現れる度に(ステップa)、モジュール6はこのサンプルを、この変数に関してバス上で利用可能な情報の不在又は無効性を示す値と比較する(ステップb)。この試験の結果がポジティブであれば、次いで「フラッグ」SWACANDefault_Detectedを1に設定し、現在のサンプルSWA_nを、ランク(n−1)の直前のサンプル、即ちSWA_nm1で置き換える(ステップc)。結果がネガティブである場合、サンプルSWA_nは、バスで読み取られた通りにステアリングホイール角Av_CANを表わすのに妥当であり、前記フラッグが0に設定又は確認される(ステップd)。
【0013】
ステアリングホイール角センサによって検出された、「度」で表現されるステアリングホイール角の値は、SWA_sensor_degと呼ばれ、コンピュータ3の他のブロックで使用される。ステップeにおいて、この値は、この値のランクnm1の前のサンプルの値と等しくされる。
このように直前のサンプルを使用することは、ステアリングホイール角が、ステアリングホイール角センサによって送達される信号のサンプリング周波数の周期(通常10m秒のオーダー)に亘ってゆっくりと変化するので、正常な車両走行状態の下で完全に合理的である。
【0014】
付随的に、ステアリングホイール角は1600°/秒を超える速さで変化できないことが実験的に確立された。従って、この値が範囲を逸脱することは、この角度の測定にエラーがあることを意味する。ステップfにおいて、サンプリングの瞬間nm1とnとの間におけるステアリングホイール角の変化の勾配又は割合の絶対値を、最大値と考えられる制限値と比較することにより、この妥当性条件を試験する。上記のようにサンプリング周期を10m秒とすると、この制限値は16°、即ち1600°/秒である。勾配の測定時刻を定め、例えばコンピュータ3の最後のゼロ化(リセット)から5秒毎とすることにより、コンピュータのウォーミングアップ及び初期化の間にこの制限値を超える勾配を検出することを回避する。これは、ウォーミングアップ及び初期化の段階では、コンピュータの状態が変化していることに起因して値が急激に変化するため、エラーの誤検出が起こり易いためである。
この制限値を超えていた場合、フラッグSWAGradientDefaultDetectedを1に設定し、ステアリングホイール角のランクnm1の前のサンプルSWA_Sensor_degを次のブロックで使用する(ステップg)。制限値を超えていない場合、このフラッグを0に維持し、バスで使用可能な現在のサンプルSWA_nを次の計算に使用する(ステップh)。ステップiでは、SWA_Sensor_degの値が保存され、その後、制御法則を実行する実行手段4により値SWA_nと共に使用される。
【0015】
次に図4のフロー図を参照し、車両速度の測定値のエラーを検出し、このエラーを補正又は補償する処理のステップを詳細に説明する。偶然にも、この処理は、ステアリングホイール角に関して図3を参照して上記に説明した処理と非常に類似している。
車両速度の現在値VehicleSpeed_CANのサンプルVS_nがCANネットワークのバス1に現れる度に(ステップa)、モジュール6は、このサンプルを、このサンプルの不在又は無効性を表わす値と比較する(ステップb)。この試験の結果がポジティブであれば、「フラッグ」VSCANDefault_Detectedを1に設定して、現在のサンプルVS_nを直前のサンプルVS_nm1で置換する(ステップc)。ネガティブである場合、サンプルVS_nは、バスで読み取られた通りに車両速度VehicleSpeed_CANを表わすのに妥当であり、前記フラッグが0に設定又は確認される(ステップd)。
【0016】
この測定に適したセンサにより検出され、コンピュータ3の他のブロックで使用される車両速度の値(kmh)をVS_kmhとする。ステップeでは、この値を、この値のランクnm1の前のサンプルの値と等しくする。
このような置換は、サンプリング期間(この場合20m秒に設定)の間は通常、車両速度に殆ど変化がないので、ステアリングホイール角に関して上述したものと同様の観察により合理的である。
【0017】
付随的に、実験によって、車両速度は20m秒の間に1kmhを超える変化を示さないということを確認することができた。この値の範囲の逸脱は、この速度の検出にエラーがあることを意味する。ステップfにおいて、この制限値を、サンプリングの瞬間nm1とnの間における速度の変化の勾配又は割合の絶対値と比較することにより、この妥当性条件を試験する。勾配の測定時刻を定め、例えばコンピュータ3の最後のゼロ化(リセット)から5秒毎とする。
この制限値を超えていた場合、フラッグVSGradientDefaultDetectedを1に設定し、速度のランクnm1の前のサンプルVS_kmh_nm1をコンピュータの他のブロックで使用する(ステップg)。制限値を超えていない場合、このフラッグを0に維持し、バス上で使用可能な現在のサンプルVS_nを次の計算に使用する(ステップh)。ステップiでは、次に、制御法則を実行する実行手段4により、VS_nとともにVS_kmhの値が使用される。
【0018】
次に図5のフロー図を参照し、エラー検出及びバス1で利用可能な車両の進行方向に関する情報の修正の処理について説明する。
この態様においては、信頼性のある情報を有することが必須である。これは、車両が前進しているか、後進しているかによって後輪の操舵角の制御方針が大きく異なるためである。車両速度が非ゼロであるとき、「進行方向」に関する情報が、前進ギヤに対応する値からリバースギヤに対応する値へと、突然且つ誤って切り換わると、後輪操舵角の値を計算するために2つの異なる制御法則が交代で呼び出されるため、後輪の操舵角指令も現在の値から明らかに異なる値へと急激に変化する。続いて発生する後輪操舵角の急激な変化により、車両の運転者が困難な状況に陥いる危険がある。
【0019】
このような危険を防ぐため、本発明によれば、システムの状態管理モジュール7は、このシステムの状態に関する情報を信号モニタリングモジュール6へと送達し、よってモジュール6は、「進行方向」情報の値と、モジュール6により決定される信号の状態の変化との一貫性を確認することができる。
図2に示す状態の線図では、実際に、低速又は高速での前進ギヤでの動作モードから、リバースギヤでの動作モードに切換えるために、システムは「停止」状態を通過しなくてはならないことが分かる。モジュール6が受信する「進行方向」情報は、モジュール7によって確立されるシステムの状態と、変化も含めて常に一貫性を有しなければならない。
【0020】
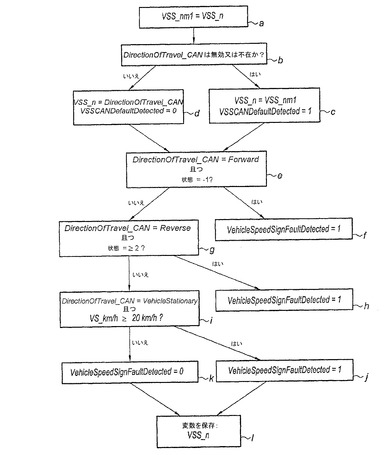
図5のフロー図は、この一貫性を確認する処理を説明したものである。
第一に、ステアリングホイール角及び車両速度の場合と同じように、バス上で読み取られた進行方向に関する情報VSS_nが不在であるか、又は無効であることを表わす値を採る場合、VSSCANDefaultDetectedフラッグを1に設定する。そうでない場合、当該フラッグを0に設定する(ステップa〜dを参照)。状況に応じて、サンプルVSS_nm1又はVSS_nをDirectionOfTravel__CAN情報として採用し、その後バス上で読み取ることができる車両の進行方向を表わす情報として使用する。
【0021】
次いで、モジュール7によって送達される状態に関する情報と、バスによって送達されるDirectionOfTravel_CAN情報によって供給される情報との一貫性または不一致を、車両に可能な3つの状態(前進ギヤ、リバースギヤ、停止状態)において試験する。
このように、ステップeでは、状態管理モジュール7により観察したところ、システムがリバースギヤに関連する状態−1にあるのに対し、DirectionOfTravel_CAN情報が前進ギヤを示す状況の出現を探す。そのような状況が検出されたら、VehicleSpeedSignFaultDetectedフラッグを1に設定する(ステップf)。このような状況が無ければ、このフラッグを0に維持し、処理はステップgに進んで、モジュール7によってコード化された車両の状態(図2参照)が2以上(車両が低速又は高速で前進している)であるのに対し、DirectionOfTravel_CAN情報がリバースギヤを示唆する状況を探す。このような状況が出現したら、VehicleSpeedSignFaultDetectedフラッグを1に設定する(ステップh)。このような状況が無ければ、このフラッグを0に維持し、処理は、車両の現在の速度に関する情報VS_kmhが、この速度が比較的低い閾値である例えば20km/時以上であることから非ゼロの値を示すのに対し、DirectionOfTravel_CANによって車両が停止していることが示唆される状況へと進む(ステップi)。このような状況が出現したら、前記フラッグを1に切換え(ステップj)、このような状況が無ければゼロに維持する(ステップk)。
【0022】
これら3つの一貫性試験を実行した後、車両の進行方向を表わす変数を残りの計算のために保存する。この値は、図5のフロー図のステップc及びdに関連して上述したVSS_n又はVSS_nm1に等しい。
このように、モジュール6によって有効化された後輪操舵角を制御するための制御法則のこれら3つの入力変数は、これらの法則を実行する手段4によって使用され、よって第1に適用される法則が選択され、第2にこの法則が実際に実行される。
【0023】
これに関して、本発明の別の特徴によれば、上記フラッグのいずれか1つが、異常に長いと思われる期間に亘り(例えば50m秒)1に維持され、よって制御法則の入力変数の少なくとも1つに、この法則を使用して計算される操舵角の値にエラーを生じさせる恐れのある持続的なエラーがあることが示唆される場合、「グレードの低い」方法であるが安全性の高い操舵角計算方法を、これらの制御法則の代わりに使用する。グレードの低いこの方法は、この操舵角を徐々にゼロに戻す。このように、この角度の値を調節することにより通常得られる利点は、一時的には失われるが、このような損失は、車両の安全性が向上することで補償される。
【0024】
以上の説明により、本発明が、後輪操舵角の計算に使用される入力変数の1つ以上に瞬間的なエラーが生じる場合、当該角度の計算の安全性を高め、更に、これらの変数に持続的なエラーが生じる場合に車両の動作の安全性を高めることが明らかである。
【図面の簡単な説明】
【0025】
【図1】本発明による、後輪の操舵角を制御するための装置のブロック図である。
【図2】図1のブロック図の「状態管理モジュール」として知られるモジュールの機能線図である。
【図3】ステアリングホイールの回転角の現在値のエラーを検出して補正するプログラムのフロー図であり、本発明を例示する方法を示す。
【図4】車両速度の現在値のエラーを検出して補正するプログラムのフロー図であり、本発明を例示する方法を示す。
【図5】車両の進行方向の現在値のエラーを検出して補正するプログラムのフロー図であり、本発明を例示する方法を示す。
【特許請求の範囲】
【請求項1】
操舵角がステアリングホイールによって設定される、操舵される前輪のフロントアクスルと、操舵される後輪のリアアクスルとを備えた自動車の、後輪の操舵角を制御する方法であって、前記後輪操舵角が、少なくとも前記ステアリングホイールの回転角(SWA_Sensor_deg)及び前記車両の速度(VS_kmh)からなる入力変数の関数である制御法則から取得され、前記入力変数の少なくとも1つのエラー値の出現を検出すること、及びその場合に前記値を前記変数の信頼性のある前の値で置換することを特徴とする方法。
【請求項2】
前記エラー値の生成が所定の期間より長い期間に亘って持続する場合、前記後輪操舵角を計算するより安全な方法を、前記制御法則によって規定される前記角度を計算する方法に代えて使用する、請求項1に記載の方法。
【請求項3】
前記より安全な計算方法が、前記後輪操舵角を徐々にゼロに戻すことを特徴とする、請求項2に記載の方法。
【請求項4】
サンプリングされたデジタルデータの形式(SWA_n、VS_n、VSS_n)で少なくとも前記入力変数を分配するバス(1)を備えたローカル通信ネットワークを装備する車両に使用される、請求項1ないし3のいずれか1項に記載の方法であって、前記デジタルデータの1つの現在のサンプルにエラー値が検出されると、前記データの信頼性のある前のサンプル(SWA_nm1、VS_nm1、VSS_nm1)によって前記サンプルを置換し、前記制御法則を用いて前記後輪操舵角を計算する方法。
【請求項5】
前記バス(1)上で利用可能な前記データの前記現在のサンプルの値を、その無効性又はバス(1)上での不在を示す値と比較し、その結果前記無効性又は不在を示すフラッグの値を設定することを特徴とする、請求項4に記載の方法。
【請求項6】
サンプリング期間に亘って車両速度の勾配を測定し、前記勾配を、前記勾配の所定の限界値と比較し、その結果前記制限値を超過している場合にそのことを示すフラッグの値を設定することを特徴とする、請求項4又は5に記載の方法。
【請求項7】
サンプリング期間に亘ってステアリングホイールの回転角度の勾配を測定し、前記勾配を、前記勾配の所定の限界値と比較し、その結果前記制限値を超過している場合にそのことを示すフラッグの値を設定することを特徴とする、請求項4ないし6のいずれか1項に記載の方法。
【請求項8】
前記勾配の前記測定の時刻を設定することを特徴とする、請求項6又は7に記載の方法。
【請求項9】
前記入力変数の1つが前記車両の進行方向からなり、前記バスで読み出される前記変数と、前進ギヤ、リバースギヤ、又は停止状態に入っている車両の状態との一貫性をチェックし、その結果、前記変数の現在のサンプルにエラーがある場合、当該エラーを示すフラッグを設定することを特徴とする、請求項4ないし8のいずれか1項に記載の方法。
【請求項10】
前記フラッグのいずれか1つが、所定の期間を超える期間に亘って入力変数に関連するエラーを示す状態を維持する間は、前記より安全な計算方法を使用して前記後輪操舵角を計算することを特徴とする、請求項4ないし9のいずれか1項に記載の方法。
【請求項11】
請求項1ないし10のいずれか1項に記載の方法を実行するための装置であって、前記制御法則の実行手段(4)、及び前記法則に基づいて得られた後輪操舵角の指令を受けて、前記角度を前記指令された値に変更する手段(5)を備え、前記制御法則の入力変数を表わす、前記変数のいずれか1つの現在値のエラーを示すことができる信号をモニタリングして、前記現在値を、前記変数の信頼性のある前の値で置換する手段(6)を備えることを特徴とする、装置。
【請求項12】
前記制御法則の前記実行手段(4)が、前記後輪操舵のより安全な計算方法を実行する手段を含むことを特徴とする、請求項11に記載の装置。
【請求項13】
前記信号の前記モニタリング手段(6)によるエラーの検出、及び前記車両の速度及び進行方向に関して前記手段(6)により送達されるより安全な信号を受けて、停止状態、前進ギヤ又はリバースギヤに入っている車両の状態に関する信頼性のある情報を、前記制御法則実行手段(4)に送達し、よって前記制御法則実行手段(4)が前記法則を適切に選択することを可能にする、状態管理手段(7)を備えることを特徴とする、請求項11又は12に記載の装置。
【請求項14】
前記情報が前記モニタリング手段(6)にも送達され、モニタリング手段が、車両の進行方向に関する変数(DirectionOfTravel_CAN)の、前記情報との一貫性をチェックする手段を含むことを特徴とする、請求項13に記載の装置。
【請求項15】
請求項11ないし14のいずれか1項に記載の装置を装備する自動車。
【請求項1】
操舵角がステアリングホイールによって設定される、操舵される前輪のフロントアクスルと、操舵される後輪のリアアクスルとを備えた自動車の、後輪の操舵角を制御する方法であって、前記後輪操舵角が、少なくとも前記ステアリングホイールの回転角(SWA_Sensor_deg)及び前記車両の速度(VS_kmh)からなる入力変数の関数である制御法則から取得され、前記入力変数の少なくとも1つのエラー値の出現を検出すること、及びその場合に前記値を前記変数の信頼性のある前の値で置換することを特徴とする方法。
【請求項2】
前記エラー値の生成が所定の期間より長い期間に亘って持続する場合、前記後輪操舵角を計算するより安全な方法を、前記制御法則によって規定される前記角度を計算する方法に代えて使用する、請求項1に記載の方法。
【請求項3】
前記より安全な計算方法が、前記後輪操舵角を徐々にゼロに戻すことを特徴とする、請求項2に記載の方法。
【請求項4】
サンプリングされたデジタルデータの形式(SWA_n、VS_n、VSS_n)で少なくとも前記入力変数を分配するバス(1)を備えたローカル通信ネットワークを装備する車両に使用される、請求項1ないし3のいずれか1項に記載の方法であって、前記デジタルデータの1つの現在のサンプルにエラー値が検出されると、前記データの信頼性のある前のサンプル(SWA_nm1、VS_nm1、VSS_nm1)によって前記サンプルを置換し、前記制御法則を用いて前記後輪操舵角を計算する方法。
【請求項5】
前記バス(1)上で利用可能な前記データの前記現在のサンプルの値を、その無効性又はバス(1)上での不在を示す値と比較し、その結果前記無効性又は不在を示すフラッグの値を設定することを特徴とする、請求項4に記載の方法。
【請求項6】
サンプリング期間に亘って車両速度の勾配を測定し、前記勾配を、前記勾配の所定の限界値と比較し、その結果前記制限値を超過している場合にそのことを示すフラッグの値を設定することを特徴とする、請求項4又は5に記載の方法。
【請求項7】
サンプリング期間に亘ってステアリングホイールの回転角度の勾配を測定し、前記勾配を、前記勾配の所定の限界値と比較し、その結果前記制限値を超過している場合にそのことを示すフラッグの値を設定することを特徴とする、請求項4ないし6のいずれか1項に記載の方法。
【請求項8】
前記勾配の前記測定の時刻を設定することを特徴とする、請求項6又は7に記載の方法。
【請求項9】
前記入力変数の1つが前記車両の進行方向からなり、前記バスで読み出される前記変数と、前進ギヤ、リバースギヤ、又は停止状態に入っている車両の状態との一貫性をチェックし、その結果、前記変数の現在のサンプルにエラーがある場合、当該エラーを示すフラッグを設定することを特徴とする、請求項4ないし8のいずれか1項に記載の方法。
【請求項10】
前記フラッグのいずれか1つが、所定の期間を超える期間に亘って入力変数に関連するエラーを示す状態を維持する間は、前記より安全な計算方法を使用して前記後輪操舵角を計算することを特徴とする、請求項4ないし9のいずれか1項に記載の方法。
【請求項11】
請求項1ないし10のいずれか1項に記載の方法を実行するための装置であって、前記制御法則の実行手段(4)、及び前記法則に基づいて得られた後輪操舵角の指令を受けて、前記角度を前記指令された値に変更する手段(5)を備え、前記制御法則の入力変数を表わす、前記変数のいずれか1つの現在値のエラーを示すことができる信号をモニタリングして、前記現在値を、前記変数の信頼性のある前の値で置換する手段(6)を備えることを特徴とする、装置。
【請求項12】
前記制御法則の前記実行手段(4)が、前記後輪操舵のより安全な計算方法を実行する手段を含むことを特徴とする、請求項11に記載の装置。
【請求項13】
前記信号の前記モニタリング手段(6)によるエラーの検出、及び前記車両の速度及び進行方向に関して前記手段(6)により送達されるより安全な信号を受けて、停止状態、前進ギヤ又はリバースギヤに入っている車両の状態に関する信頼性のある情報を、前記制御法則実行手段(4)に送達し、よって前記制御法則実行手段(4)が前記法則を適切に選択することを可能にする、状態管理手段(7)を備えることを特徴とする、請求項11又は12に記載の装置。
【請求項14】
前記情報が前記モニタリング手段(6)にも送達され、モニタリング手段が、車両の進行方向に関する変数(DirectionOfTravel_CAN)の、前記情報との一貫性をチェックする手段を含むことを特徴とする、請求項13に記載の装置。
【請求項15】
請求項11ないし14のいずれか1項に記載の装置を装備する自動車。
【図1】

【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公表番号】特表2009−520633(P2009−520633A)
【公表日】平成21年5月28日(2009.5.28)
【国際特許分類】
【出願番号】特願2008−546530(P2008−546530)
【出願日】平成18年10月16日(2006.10.16)
【国際出願番号】PCT/FR2006/051035
【国際公開番号】WO2007/071852
【国際公開日】平成19年6月28日(2007.6.28)
【出願人】(503041797)ルノー・エス・アー・エス (286)
【Fターム(参考)】
【公表日】平成21年5月28日(2009.5.28)
【国際特許分類】
【出願日】平成18年10月16日(2006.10.16)
【国際出願番号】PCT/FR2006/051035
【国際公開番号】WO2007/071852
【国際公開日】平成19年6月28日(2007.6.28)
【出願人】(503041797)ルノー・エス・アー・エス (286)
【Fターム(参考)】
[ Back to top ]