
自動車の走行状態判定装置
【発明の詳細な説明】
【0001】
【産業上の利用分野】本発明は、自車両が現在走行している走行レーンから逸脱するのを予測する自動車の走行状態判定装置に関する。
【0002】
【従来の技術】従来、例えば特開昭63−214900号公報に記載されるように、運転者の脇見や不注意等、運転者の意識的な操舵によらずに、車両が所定の走行レーンから外れたときに、運転者に警告を発して注意を喚起する装置が知られている。そのような装置では、車体と白線との間隔D1 ,D2 を算出し、その間隔D1 ,D2 が所定値A1 ,A2 (これ以上近付いたら他の車両や路肩に近付き、車線逸脱のおそれがある所定に距離に相当する)よりも小さいか否かを判定するようにしている。
【0003】
【発明が解決しようとする課題】ところが、上記従来のものでは、車体と白線との間隔D1 ,D2 を算出し、その間隔D1 ,D2 が所定値A1 ,A2 よりも小さいか否かにより逸脱であるか否かを判定するようにしているので、間隔D1 ,D2 が所定値A1 ,A2 よりも小さい場合には、逸脱回避方向に自車両が移動している場合であっても、警報が出力されることになる。
【0004】本発明は、白線付近であっても、逸脱回避方向に自車両が移動している場合には逸脱と判定せず、精度よく走行レーンからの逸脱判定ができる自動車の走行状態判定装置を提供するものである。
【0005】
【課題を解決するための手段】本発明は、自車両が現在走行している走行レーンから逸脱するのを予測する自動車の走行状態判定装置を前提とする。
【0006】そして、請求項1に係る発明では、道路面上の白線に基づき走行路を推定する走行路推定手段と、該走行路推定手段の出力を受け、自車両から所定距離前方の走行路の白線と、自車両中心軸とがなす交差角度を検出する角度検出手段と、該角度検出手段の出力を受け、走行路の白線と自車両中心軸とがなす交差角度に基づき、自車両の走行レーンに対する逸脱を判定する逸脱判定手段とを備え、上記逸脱判定手段は、少なくとも自車両の車速、走行レーンの幅及び自車両の走行レーン内の位置に基づいてしきい値を設定して、上記交差角度の該しきい値に対する大きさ比較により、自車両の走行レーンに対する逸脱を判定するように構成されているものとする。
【0007】また、請求項2に係る発明では、道路面上の白線に基づき走行路を推定する走行路推定手段と、舵角、車速等の車両状態量に基づき自車両の進行路を推定する進行路推定手段と、上記走行路推定手段の出力を受け、走行路の白線と、自車両中心軸とがなす交差角度である第1角度を検出する第1角度検出手段と、上記進行路推定手段の出力を受け、自車両の進行方向と、自車両中心軸とがなす交差角度である第2角度を検出する第2角度検出手段と、上記第1及び第2角度検出手段の出力を受け、第1及び第2角度の相違に基づき、自車両の走行レーンに対する逸脱を判定する逸脱判定手段とを備える構成とする。
【0008】
【作用】請求項1に係る発明によれば、走行路推定手段によって推定された走行路の白線と自車両中心軸とがなす交差角度に基づき、逸脱判定手段によって、自車両が走行レーンから逸脱するか否かが判定される。具体的には、逸脱判定手段により、少なくとも自車両の車速、走行レーンの幅及び自車両の走行レーン内の位置に基づいてしきい値が設定されて、上記交差角度の該しきい値に対する大きさ比較により、自車両の走行レーンに対する逸脱が判定される。
【0009】請求項2に係る発明によれば、走行路の白線と自車両中心軸とがなす交差角度である第1角度と、自車両の進行方向と自車両中心軸とがなす交差角度である第2角度との相違に基づき、逸脱判定手段によって、自車両が走行レーンから逸脱するか否かが判定される。
【0010】
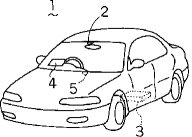
【実施例】以下、本発明の実施例を図面に沿って詳細に説明する。但し、先ず最初に、本発明の実施例と主要部以外の構成が類似した参考例(参考例1,2)を説明し、その後に本発明の実施例を、その参考例と異なる部分に関して説明する。参考例1自動車の全体を示す図1において、1は自動車で、その車室内上部にCCDカメラ2が配設されている。CCDカメラ2は、自車両前方の情景(走行路)を所定範囲内で写し出すものであり、該CCDカメラ2で写し出された自車両前方の情景は、信号として、コントロールユニット3に入力される。4は車室内前部に配設されたヘッドアップディスプレイ、5はインストルメントパネルに配設された音声による警報装置である。
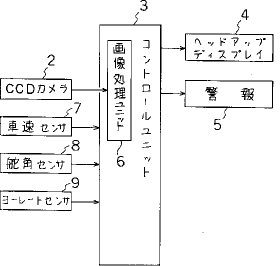
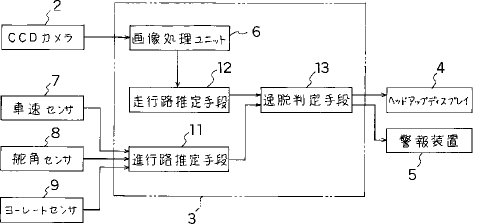
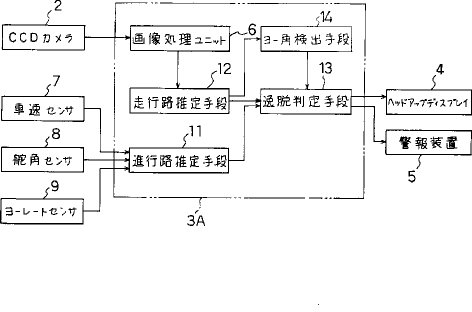
【0011】上記コントロールユニット3には、図2に示すように、画像処理ユニット6に入力されるCCDカメラ2からの信号のほか、自車両の車速を検出する車速センサ7及び自車両のステアリング舵角を検出する舵角センサ8からの信号が入力され、コントロールユニット3において、自車両が現在走行している走行レーンから現在又は将来に逸脱するおそれがある状況下にあると判定された場合には、ヘッドアップディスプレイ4によって表示すると共に、警報装置5によって警報が出力され、運転者の注意を喚起するように構成されている。尚、警報装置5により警報を発するだけでなく、具体的には図示していないが、警報出力後一定時間以内に運転者が逸脱回避動作をとらない場合には、自動操舵装置により走行レーンから逸脱しないように修正操舵がなされるようにすることもできる。
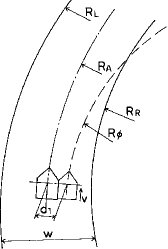
【0012】上記コントロールユニット3は、具体的には、図3に示すように、舵角、車速等の車両状態量に基づき自車両の進行路を推定する進行路推定手段11と、道路面上の白線に基づき走行路を推定する走行路推定手段12と、上記進行路推定手段11及び走行路推定手段12の出力を受け、進行路の曲率半径と走行路の曲率半径との相違に基づき、自車両の上記走行レーンに対する逸脱を判定する逸脱判定手段13とを備える。
【0013】上記逸脱判定手段13は、進行路の曲率半径と走行路の曲率半径との差と、車速、車線幅、自車両の車線内の位置等に基づいて定められるしきい値とを比較して、自車両の上記走行レーンに対する逸脱を判定するように構成されている。
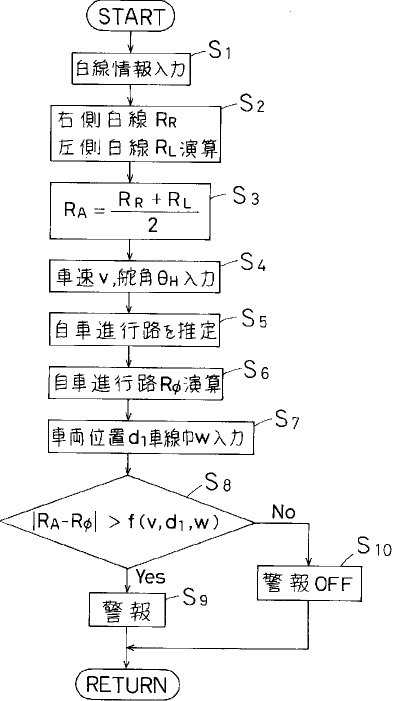
【0014】上記コントロールユニット3の具体的な制御の流れは、図4に示すように行われる。
【0015】図4において、スタートすると、画像処理ユニット6より白線情報が入力され(ステップS1 )、走行路の左右の白線の曲率半径RR ,RL が演算され(ステップS2 )、それらを平均して平均曲率半径RA (走行レーン中央の曲率半径に相当)を演算される(ステップS3 )。
【0016】それから、自車両の車速V及び舵角θH が読み込まれ(ステップS4 )。車速及び舵角に基づき自車両の進行路が推定され(ステップS5 )、自車両の進行路の曲率半径Rφが、次の式■により演算される(ステップS6 )。
【0017】
【数1】

【0018】それに続いて、自車両の走行レーン内の位置d1 (走行レーンの中央線よりの偏位量)及び走行レーンの幅W(車線幅)が演算される(ステップS7 )。
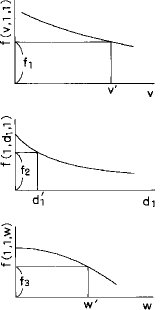
【0019】それから、上記走行路の平均曲率半径RA と進行路の曲率半径Rφとの差RA−Rφが、車速V、走行レーンの幅W、自車両の走行レーン内の位置d1 に基づいて定められる所定のしきい値f(V,W,d1 )を越えるか否かが判定される(ステップS8 )。尚、しきい値f(V,W,d1 )としては、次の式■によって決定される値や、式■によって決定される値(図5参照)を用いることができる。
【0020】
【数2】
【0021】
【数3】
【0022】所定のしきい値f(V,W,d1 )を越えれば、走行レーンからの逸脱の可能性があるので、警報装置5により警報を出力し(ステップS9 )、リターンする一方、所定のしきい値f(V,W,d1 )を越えなければ、警報装置5による警報をOFFとして(ステップS10)、リターンする。
【0023】このように、走行路推定手段12によって推定された走行レーンの側縁(白線)の曲率半径RA と進行路推定手段11によって推定した進行路の曲率半径Rφとの差が演算され、該差が、逸脱判定手段13によって、車速V、走行レーンの幅W、自車両の走行レーン内の位置d1 により決定される所定のしきい値f(V,W,d1 )と比較され、その比較した結果から自車両が走行レーンから逸脱する状況下にあるか否かが判定されるようになっているので(図6参照)、自車両の走行レーン内における走行位置にかかわりなく、走行レーンからの逸脱を予測することが可能となる。
【0024】即ち、走行レーンの中央を走行していても曲率半径RA ,Rφの相違が大きいときは警報が出力され、走行レーンの側縁付近を走行していても、それらの相違が小さいときは警報は出力されない。
【0025】従って、上記参考例1では、走行路推定手段12によって推定された走行レーンの側縁(白線)の曲率半径RA と進行路推定手段11によって推定した進行路の曲率半径Rφとの差に基づき逸脱判定手段13によって逸脱を判定するようにしているが、それに代えて、走行路推定手段12によって推定された走行レーンの側縁(白線)の曲率半径RA と進行路推定手段11によって推定した進行路の曲率半径Rφとの商に基づき逸脱判定手段によって逸脱を判定するようにすることもできる。即ち、図4のステップS8 において、次の式■又は式■によって、走行レーンからの逸脱判定が行われることになる。
【0026】
【数4】
【0027】
【数5】
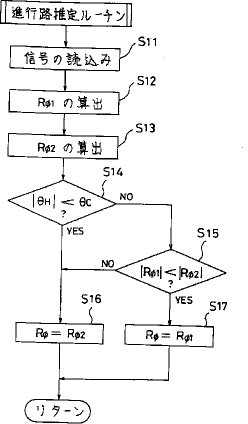
【0028】ところで、上記進行路推定手段11による進行路推定は、上記式■により行うようにしているが、自車両のヨーレートを検出するヨーレートセンサ9を設け、該ヨーレートセンサ9の信号がコントロールユニット3に入力されるようにし、ヨーレートγも考慮して、より精度よく進行路を推定するために、図7に示すサブルーチンに従って進行路推定を行うようにすることもできる。即ち、ステップS11で車速センサ7、舵角センサ8及びヨーレートセンサ9からの各信号を読込んだ後、ステップS12でステアリング舵角θH と車速Vとに基づいた第1の予測方法により自車両の進行路を予測する。具体的には、進行路についての推定値である曲率半径Rφ1 を下記の式■(上記式■と同じ)により算出する。
【0029】
【数6】
【0030】続いて、ステップS13でヨーレートγと車速Vとに基づいた第2の予測方法により自車両の進行路を予測する。具体的には、進行路についての推定値である曲率半径Rφ2 を下記の式■により算出する。
【0031】
【数7】
【0032】その後、ステップS14でステアリング舵角θH の絶対値が所定角度θc よりも小さいか否かを判定する。この判定がYESのときには、ステップS16で第2の予測方法により予測された進行路Rφ2 を選択し、進行路の曲率半径Rφに推定値Rφ2 を設定し、リターンする。
【0033】一方、上記ステップS14の判定がNOのとき、つまりステアリング舵角θH が所定角度θc より大きいときには、更にステップS15で第1の予測方法により予測された進行路の曲率半径Rφ1 の絶対値と第2の予測方法により予測された進行路の曲率半径Rφ2 の絶対値との大小を比較する。そして、第1の予測方法により予測された進行路の曲率半径Rφ1 の方が小さいときには、ステップS17へ移行して、進行路の曲率半径Rφに推定値Rφ1を設定する一方、第2の予測方法により予測された進行路の曲率半径Rφ2 の方が小さいときには、ステップS16へ移行して、進行路の曲率半径RφにRφ2 を設定する。つまり、曲率半径の小さい方を進行路として選択する。
【0034】また、進行路推定手段11においては、ステアリング舵角θH と車速Vとに基づいた進行路の推定と、ヨーレートγと車速Vとに基づいた進行路の推定とを共に行い、自車両の走行状態に応じて、いずれか一方の推定を用いるようになっているので、進行路の推定を適切に行うことができる。即ち、自車両がカントを有する曲線路上を旋回走行するときには、ステアリングハンドルを大きく操舵しなくても自車両はカントにより旋回運動をすることから、ヨーレートγに基づいて予測された進行路の曲率半径Rφ2 が、ステアリング舵角θH に基づいて予測された進行路の曲率半径Rφ1 よりも小さくなる。このとき、進行路推定手段11は、ヨーレートγに基づいて予測された進行路の曲率半径Rφ2 を採用するので、カントに影響されることなく、進行路を適切に推定することができる。また、自車両が急激な旋回走行をするとき、進行路推定手段11は、大きな値となるステアリング舵角θH に対応して、進行路が曲率半径Rφの小さいものと推定することなり、急激な旋回運転にも充分に対応して進行路の推定を適切に行うことができる。
【0035】一方、上記走行路推定手段12による走行路推定は、図8に示すサブルーチンに従って行われる。尚、前提条件として、直線路では横すべり角が発生しないこと、直線路では白線部に対する車体姿勢角は微小であること、曲線路では走行軌跡は車線を平行移動したものと考える。また、座標は、道路面上の車両を原点とし、車両の前後方向をx軸として前方を正にとり、左右方向をy軸として左方を正にとったものを考える。
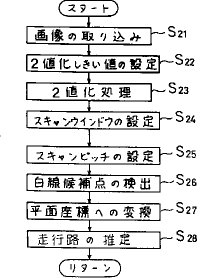
【0036】具体的には、図8において、スタートすると、まず、画像(画像データ)が取り込まれ(ステップS21)、二値化のしきい値が設定され(ステップS22)、それから各画素の輝度がしきい値を越えるか否かで1又は0の二値化処理される(ステップS23)。
【0037】それから、左右の白線部に対応するように左右のスキャンウインドウが設定され(ステップS24)、それに続いて、自動車の前後方向のスキャンピッチが設定され(ステップS25)、スキャンウインドウ内をスキャンピッチに従って走査し白線候補点(即ち二値化処理で1とされた点)が検出され(ステップS26)、逆透視変換により平面座標への変換がなされる(ステップS27)。
【0038】それから、白線候補点に、仮想候補点を加えて左右白線部に基づき走行路が推定され(ステップS28)、リターンする。
【0039】走行路の推定は、白線候補点、仮想候補点を用いて左右の白線部について最小二乗法による近似曲線(y=ax2+bx+c)、具体的には左白線部についての2次曲線の係数aL,bL,cL、右白線部についての2次曲線の係数aR,bR,cRが算出される。ここで、より前方まで検出しないといけないという要求から、2次曲線(y=ax2+bx+c)により近似しており、係数aL,aRは、2次近似曲線の曲率半径をRL (RR )とすると、a=1/2RL (1/2RR )となり、係数bL,bRは白線に対して車両のなす角度、係数cL,cRは車両中心から白線までの横偏差量を表わすことになる。
参考例2本参考例は、走行レーン中心線に対して自車両の進行方向がなす角であるヨー角を考慮して、自車両が走行レーンから逸脱する状況下にあるか否かを判定するものである。
【0040】コントロールユニット3Aは、図9に示すように、走行路推定手段12の出力を受け、走行レーン中心線に対して自車両の進行方向がなす角であるヨー角を検出するヨー角検出手段14を備え、逸脱判定手段13が、ヨー角を考慮して、自車両の上記走行レーンに対する逸脱を判定するようになっている。
【0041】コントロールユニット3Aの制御の流れは、図10に示すように行われる。
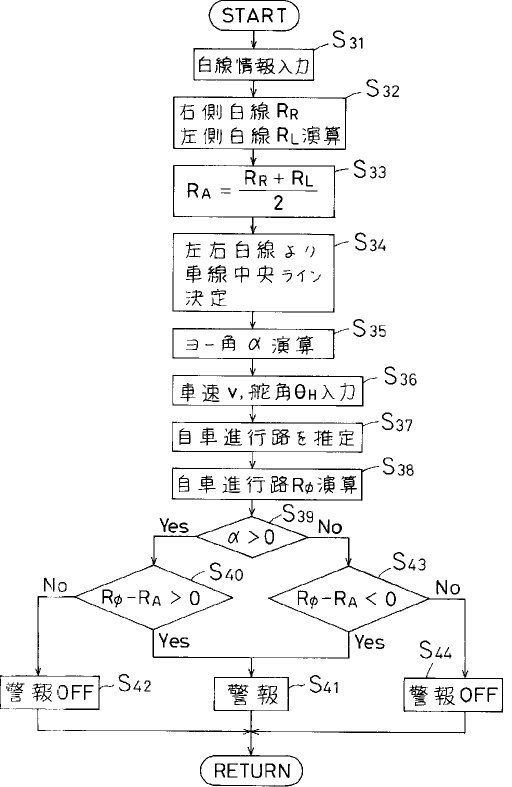
【0042】図10において、スタートすると、画像処理ユニット4より白線情報が入力され(ステップS31)、左右の白線の曲率半径RR ,RL が演算され(ステップS32)、それらを平均して平均曲率半径RA を演算する(ステップS33)。
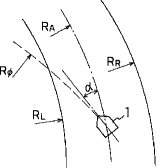
【0043】それから、左右白線に基づき走行レーン中心線(車線中央ライン)が決定される(ステップS34)。それに続いて走行レーン中心線に対して自車両の進行方向がなす角であるヨー角αが演算され(ステップS35)、車速V及び舵角θH が読み込まれ(ステップS36)。自車両の進行路が推定され(ステップS37)、自車両の進行路の曲率半径Rφが演算される(ステップS38)。尚、ヨー角αは、走行レーン中心線に対し右側に自車両が向く場合を正とする。
【0044】その後、ヨー角αが正であるか否かを判定し(ステップS39)、正であれば、上記曲率半径の差RφーRA が正であるか否かが判定され(ステップS40)、正であれば(図11参照)、車線逸脱の可能性があるので、警報を出し(ステップS41)、リターンする一方、正でなければ、警報をOFFとして(ステップS42)、リターンする。
【0045】一方、ヨー角αが正でないときは、上記曲率半径の差RφーRA が負であるか否かが判定され(ステップS43)、負であれば(図12参照)、車線逸脱の可能性があるので、警報を出し(ステップS41)、リターンする一方、負でなければ、警報をOFFとして(ステップS44)、リターンする。
実施例次に、本発明の実施例を説明する。
【0046】本実施例は、高速道路等の穏やかに走行できる道路の走行時において、運転者は通常自車両の所定距離前方を注視しており、その付近を基準にして自車両が進行しようとする走行路上のラインに、自車両の進行方向(進行路)を一致させようと操舵することを利用したものである。
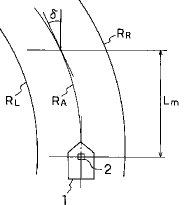
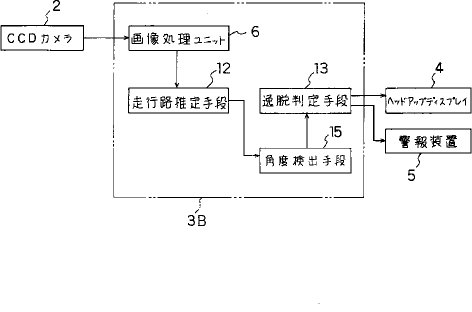
【0047】コントロールユニット3Bは、図13に示すように、走行路推定手段12の出力を受け、自車両の所定距離Lm 前方において走行路の中央ラインの接線と自車両中心軸とがなす交差角度δを検出する角度検出手段15を備え、逸脱判定手段13が、角度検出手段15の出力を受け、交差角度δに基づき、自車両の走行レーンに対する逸脱を判定するように構成されている。
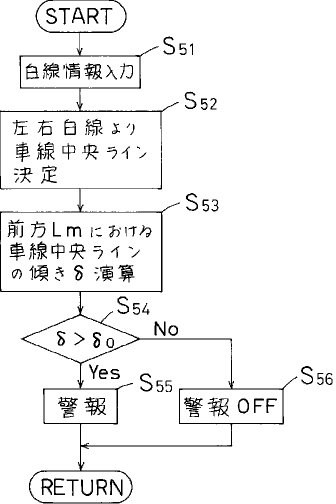
【0048】具体的な制御は、図14に示す通りである。
【0049】スタートすると、CCDカメラ2より画像処理ユニット6を通じて白線情報が入力され(ステップS51)、走行レーンの左右側縁である白線が推定され、それに基づき走行レーンの中央ライン(車線中央ライン)が決定される(ステップS52)。
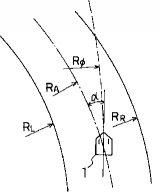
【0050】それから、自車両前方の距離Lm における中央ラインに対する接線と自車両中心軸とのなす交差角度δが演算され(ステップS53)、その交差角度δが所定角δ0 よりも大きいか否かが判定される(ステップS54)。尚、距離Lm 、交差角度δ等の関係は図15に示す通りである。所定角δ0 次の式■によって表される。
【0051】
【数8】
【0052】交差角度δが所定角度δ0 よりも大きければ、自車両が走行レーンから逸脱する可能性があるので、警報が出力され(ステップS55)、大きくなければ警報を出すことなく(ステップS56)、リターンする。
【0053】上記実施例では、自車両前方の距離Lm における中央ラインに対する接線と自車両中心軸とのなす交差角度δに基づいて判断するようにしているが、それに代えて、式■に示すように、上記交差角度δである第1角度と、自車両前方の距離Lm における進行路に対する接線(進行方向)と自車両中心軸とのなす交差角度である第2角度δ1 との差が、所定角度δ01よりも大きいか否かにより、走行レーンからの逸脱を判定するようにすれば、より精度よく判定することができる。
【0054】
【数9】
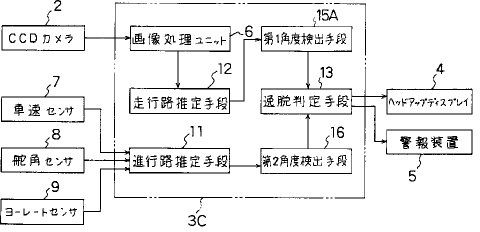
【0055】この場合は、コントロ−ルユニット3Cは、図16に示すように、走行路推定手段12の出力を受け、走行路の白線と、自車両中心軸とがなす交差角度である第1角度を検出する第1角度検出手段15Aと、進行路推定手段11の出力を受け、自車両の進行方向と自車両中心軸とがなす交差角度である第2角度を検出する第2角度検出手段16とを備え、逸脱判定手段13が、上記第1及び第2角度検出手段の出力を受け、第1及び第2角度の相違に基づき、自車両の走行レーンに対する逸脱を判定するようになっている。
参考例3ここで、さらに別の参考例を記載しておく。
【0056】本参考例は、自車両前方の走行路の白線までの直線距離、該直線距離の時間に対する変化率に基づいて、自車両が逸脱方向に移動しているか、逸脱回避方向に移動しているかを判断するものである。
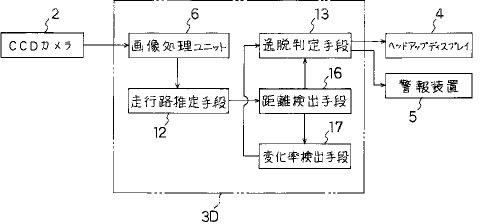
【0057】コントロ−ルユニット3Dは、図17に示すように、走行路推定手段12の出力を受け、自車両前方の走行路の白線までの直線距離を検出する距離検出手段17と、上記走行路推定手段12の出力を受け、自車両前方の走行路の白線までの直線距離の、時間に対する変化率を検出する変化率検出手段18を備え、逸脱判定手段13が、距離検出手段17及び変化率検出手段18の出力を受け、自車両前方の走行路の白線までの直線距離及びその距離の、時間に対する変化率に基づき、自車両の走行レーンに対する逸脱を判定するように構成されている。
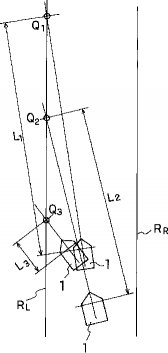
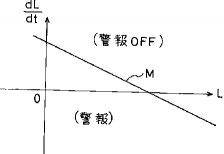
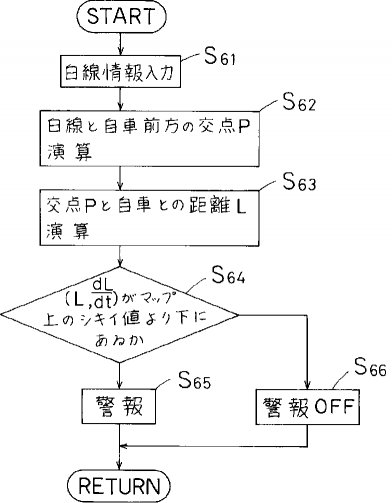
【0058】図18において、スタートすると、白線情報が入力され(ステップS61)、白線と自車両中心延長線との、自車両前方での交点Q(図19では交点Q1 〜Q3、それに対応する距離L1 〜L3 を図示)が演算され(ステップS62)、上記交点Qと自車両との距離Lが演算され(ステップS63)、それから、距離L及びその変化率dL/dt より、図20に示すマップにおいて、しきい値ラインMより下にあるか否かが判定され(ステップS64)、下にあれば、警報が出され(ステップS65)、リターンする。一方、下になければ、警報をOFFして(ステップS66)、リターンする。
【0059】従って、白線から離れた位置にあっても白線に接近する方向に移動していれば、警報が出力されるが、白線付近の位置にあっても白線から離れる方向に移動していれば、警報は出力されてないことになる。
【0060】
【発明の効果】請求項1に係る発明は、走行路の白線と自車両中心軸とがなす交差角度に基づき、逸脱判定手段によって、自車両が走行レーンから逸脱する状況下にあるか否かを判定するようにしたので、自車両が走行レーンから逸脱する状況下にあるか否かを容易に判定でき、走行レーンからの逸脱を予測することができる。よって、走行レーンからの逸脱判定を精度よく行うことができる。
【0061】請求項2に係る発明は、走行路の白線と自車両中心軸とがなす交差角度である第1角度と、自車両の進行方向と自車両中心軸とがなす交差角度である第2角度に基づき、逸脱判定手段によって、自車両が走行レーンから逸脱する状況下にあるか否かを判定するようにしたので、自車両が走行レーンから逸脱する状況下にあるか否かを容易にかつ精度よく判定でき、走行レーンからの逸脱を予測することができる。
【図面の簡単な説明】
【図1】自動車の斜視図である。
【図2】制御系のブロック図である。
【図3】参考例1のコントロールユニットのブロック図である。
【図4】参考例1の制御の流れを示す流れ図である。
【図5】車速V、距離d1 、車線幅Wとしきい値との関係を示す図である。
【図6】作用の説明図である。
【図7】進行路推定のサブルーチンを示す図である。
【図8】進行路推定のサブルーチンを示す図である。
【図9】参考例2のコントロールユニットのブロック図である。
【図10】参考例2の制御の流れを示す流れ図である。
【図11】作用の説明図である。
【図12】作用の説明図である。
【図13】実施例のコントロールユニットのブロック図である。
【図14】実施例の制御の流れを示す流れ図である。
【図15】作用の説明図である。
【図16】変形例のコントロールユニットのブロック図である。
【図17】参考例3のコントロールユニットのブロック図である。
【図18】参考例3の制御の流れを示す流れ図である。
【図19】作用の説明図である。
【図20】マップの説明図である。
【符号の説明】
1 自動車(自車両)
2 CCDカメラ
3 コントロールユニット
3A〜3C コントロールユニット
11 進行路推定手段
12 走行路推定手段
13 逸脱判定手段
15 角度検出手段
15A 第1角度検出手段
16 第2角度検出手段
【0001】
【産業上の利用分野】本発明は、自車両が現在走行している走行レーンから逸脱するのを予測する自動車の走行状態判定装置に関する。
【0002】
【従来の技術】従来、例えば特開昭63−214900号公報に記載されるように、運転者の脇見や不注意等、運転者の意識的な操舵によらずに、車両が所定の走行レーンから外れたときに、運転者に警告を発して注意を喚起する装置が知られている。そのような装置では、車体と白線との間隔D1 ,D2 を算出し、その間隔D1 ,D2 が所定値A1 ,A2 (これ以上近付いたら他の車両や路肩に近付き、車線逸脱のおそれがある所定に距離に相当する)よりも小さいか否かを判定するようにしている。
【0003】
【発明が解決しようとする課題】ところが、上記従来のものでは、車体と白線との間隔D1 ,D2 を算出し、その間隔D1 ,D2 が所定値A1 ,A2 よりも小さいか否かにより逸脱であるか否かを判定するようにしているので、間隔D1 ,D2 が所定値A1 ,A2 よりも小さい場合には、逸脱回避方向に自車両が移動している場合であっても、警報が出力されることになる。
【0004】本発明は、白線付近であっても、逸脱回避方向に自車両が移動している場合には逸脱と判定せず、精度よく走行レーンからの逸脱判定ができる自動車の走行状態判定装置を提供するものである。
【0005】
【課題を解決するための手段】本発明は、自車両が現在走行している走行レーンから逸脱するのを予測する自動車の走行状態判定装置を前提とする。
【0006】そして、請求項1に係る発明では、道路面上の白線に基づき走行路を推定する走行路推定手段と、該走行路推定手段の出力を受け、自車両から所定距離前方の走行路の白線と、自車両中心軸とがなす交差角度を検出する角度検出手段と、該角度検出手段の出力を受け、走行路の白線と自車両中心軸とがなす交差角度に基づき、自車両の走行レーンに対する逸脱を判定する逸脱判定手段とを備え、上記逸脱判定手段は、少なくとも自車両の車速、走行レーンの幅及び自車両の走行レーン内の位置に基づいてしきい値を設定して、上記交差角度の該しきい値に対する大きさ比較により、自車両の走行レーンに対する逸脱を判定するように構成されているものとする。
【0007】また、請求項2に係る発明では、道路面上の白線に基づき走行路を推定する走行路推定手段と、舵角、車速等の車両状態量に基づき自車両の進行路を推定する進行路推定手段と、上記走行路推定手段の出力を受け、走行路の白線と、自車両中心軸とがなす交差角度である第1角度を検出する第1角度検出手段と、上記進行路推定手段の出力を受け、自車両の進行方向と、自車両中心軸とがなす交差角度である第2角度を検出する第2角度検出手段と、上記第1及び第2角度検出手段の出力を受け、第1及び第2角度の相違に基づき、自車両の走行レーンに対する逸脱を判定する逸脱判定手段とを備える構成とする。
【0008】
【作用】請求項1に係る発明によれば、走行路推定手段によって推定された走行路の白線と自車両中心軸とがなす交差角度に基づき、逸脱判定手段によって、自車両が走行レーンから逸脱するか否かが判定される。具体的には、逸脱判定手段により、少なくとも自車両の車速、走行レーンの幅及び自車両の走行レーン内の位置に基づいてしきい値が設定されて、上記交差角度の該しきい値に対する大きさ比較により、自車両の走行レーンに対する逸脱が判定される。
【0009】請求項2に係る発明によれば、走行路の白線と自車両中心軸とがなす交差角度である第1角度と、自車両の進行方向と自車両中心軸とがなす交差角度である第2角度との相違に基づき、逸脱判定手段によって、自車両が走行レーンから逸脱するか否かが判定される。
【0010】
【実施例】以下、本発明の実施例を図面に沿って詳細に説明する。但し、先ず最初に、本発明の実施例と主要部以外の構成が類似した参考例(参考例1,2)を説明し、その後に本発明の実施例を、その参考例と異なる部分に関して説明する。参考例1自動車の全体を示す図1において、1は自動車で、その車室内上部にCCDカメラ2が配設されている。CCDカメラ2は、自車両前方の情景(走行路)を所定範囲内で写し出すものであり、該CCDカメラ2で写し出された自車両前方の情景は、信号として、コントロールユニット3に入力される。4は車室内前部に配設されたヘッドアップディスプレイ、5はインストルメントパネルに配設された音声による警報装置である。
【0011】上記コントロールユニット3には、図2に示すように、画像処理ユニット6に入力されるCCDカメラ2からの信号のほか、自車両の車速を検出する車速センサ7及び自車両のステアリング舵角を検出する舵角センサ8からの信号が入力され、コントロールユニット3において、自車両が現在走行している走行レーンから現在又は将来に逸脱するおそれがある状況下にあると判定された場合には、ヘッドアップディスプレイ4によって表示すると共に、警報装置5によって警報が出力され、運転者の注意を喚起するように構成されている。尚、警報装置5により警報を発するだけでなく、具体的には図示していないが、警報出力後一定時間以内に運転者が逸脱回避動作をとらない場合には、自動操舵装置により走行レーンから逸脱しないように修正操舵がなされるようにすることもできる。
【0012】上記コントロールユニット3は、具体的には、図3に示すように、舵角、車速等の車両状態量に基づき自車両の進行路を推定する進行路推定手段11と、道路面上の白線に基づき走行路を推定する走行路推定手段12と、上記進行路推定手段11及び走行路推定手段12の出力を受け、進行路の曲率半径と走行路の曲率半径との相違に基づき、自車両の上記走行レーンに対する逸脱を判定する逸脱判定手段13とを備える。
【0013】上記逸脱判定手段13は、進行路の曲率半径と走行路の曲率半径との差と、車速、車線幅、自車両の車線内の位置等に基づいて定められるしきい値とを比較して、自車両の上記走行レーンに対する逸脱を判定するように構成されている。
【0014】上記コントロールユニット3の具体的な制御の流れは、図4に示すように行われる。
【0015】図4において、スタートすると、画像処理ユニット6より白線情報が入力され(ステップS1 )、走行路の左右の白線の曲率半径RR ,RL が演算され(ステップS2 )、それらを平均して平均曲率半径RA (走行レーン中央の曲率半径に相当)を演算される(ステップS3 )。
【0016】それから、自車両の車速V及び舵角θH が読み込まれ(ステップS4 )。車速及び舵角に基づき自車両の進行路が推定され(ステップS5 )、自車両の進行路の曲率半径Rφが、次の式
【0017】
【数1】
【0018】それに続いて、自車両の走行レーン内の位置d1 (走行レーンの中央線よりの偏位量)及び走行レーンの幅W(車線幅)が演算される(ステップS7 )。
【0019】それから、上記走行路の平均曲率半径RA と進行路の曲率半径Rφとの差RA−Rφが、車速V、走行レーンの幅W、自車両の走行レーン内の位置d1 に基づいて定められる所定のしきい値f(V,W,d1 )を越えるか否かが判定される(ステップS8 )。尚、しきい値f(V,W,d1 )としては、次の式
【0020】
【数2】
【0021】
【数3】
【0022】所定のしきい値f(V,W,d1 )を越えれば、走行レーンからの逸脱の可能性があるので、警報装置5により警報を出力し(ステップS9 )、リターンする一方、所定のしきい値f(V,W,d1 )を越えなければ、警報装置5による警報をOFFとして(ステップS10)、リターンする。
【0023】このように、走行路推定手段12によって推定された走行レーンの側縁(白線)の曲率半径RA と進行路推定手段11によって推定した進行路の曲率半径Rφとの差が演算され、該差が、逸脱判定手段13によって、車速V、走行レーンの幅W、自車両の走行レーン内の位置d1 により決定される所定のしきい値f(V,W,d1 )と比較され、その比較した結果から自車両が走行レーンから逸脱する状況下にあるか否かが判定されるようになっているので(図6参照)、自車両の走行レーン内における走行位置にかかわりなく、走行レーンからの逸脱を予測することが可能となる。
【0024】即ち、走行レーンの中央を走行していても曲率半径RA ,Rφの相違が大きいときは警報が出力され、走行レーンの側縁付近を走行していても、それらの相違が小さいときは警報は出力されない。
【0025】従って、上記参考例1では、走行路推定手段12によって推定された走行レーンの側縁(白線)の曲率半径RA と進行路推定手段11によって推定した進行路の曲率半径Rφとの差に基づき逸脱判定手段13によって逸脱を判定するようにしているが、それに代えて、走行路推定手段12によって推定された走行レーンの側縁(白線)の曲率半径RA と進行路推定手段11によって推定した進行路の曲率半径Rφとの商に基づき逸脱判定手段によって逸脱を判定するようにすることもできる。即ち、図4のステップS8 において、次の式
【0026】
【数4】
【0027】
【数5】
【0028】ところで、上記進行路推定手段11による進行路推定は、上記式
【0029】
【数6】
【0030】続いて、ステップS13でヨーレートγと車速Vとに基づいた第2の予測方法により自車両の進行路を予測する。具体的には、進行路についての推定値である曲率半径Rφ2 を下記の式
【0031】
【数7】
【0032】その後、ステップS14でステアリング舵角θH の絶対値が所定角度θc よりも小さいか否かを判定する。この判定がYESのときには、ステップS16で第2の予測方法により予測された進行路Rφ2 を選択し、進行路の曲率半径Rφに推定値Rφ2 を設定し、リターンする。
【0033】一方、上記ステップS14の判定がNOのとき、つまりステアリング舵角θH が所定角度θc より大きいときには、更にステップS15で第1の予測方法により予測された進行路の曲率半径Rφ1 の絶対値と第2の予測方法により予測された進行路の曲率半径Rφ2 の絶対値との大小を比較する。そして、第1の予測方法により予測された進行路の曲率半径Rφ1 の方が小さいときには、ステップS17へ移行して、進行路の曲率半径Rφに推定値Rφ1を設定する一方、第2の予測方法により予測された進行路の曲率半径Rφ2 の方が小さいときには、ステップS16へ移行して、進行路の曲率半径RφにRφ2 を設定する。つまり、曲率半径の小さい方を進行路として選択する。
【0034】また、進行路推定手段11においては、ステアリング舵角θH と車速Vとに基づいた進行路の推定と、ヨーレートγと車速Vとに基づいた進行路の推定とを共に行い、自車両の走行状態に応じて、いずれか一方の推定を用いるようになっているので、進行路の推定を適切に行うことができる。即ち、自車両がカントを有する曲線路上を旋回走行するときには、ステアリングハンドルを大きく操舵しなくても自車両はカントにより旋回運動をすることから、ヨーレートγに基づいて予測された進行路の曲率半径Rφ2 が、ステアリング舵角θH に基づいて予測された進行路の曲率半径Rφ1 よりも小さくなる。このとき、進行路推定手段11は、ヨーレートγに基づいて予測された進行路の曲率半径Rφ2 を採用するので、カントに影響されることなく、進行路を適切に推定することができる。また、自車両が急激な旋回走行をするとき、進行路推定手段11は、大きな値となるステアリング舵角θH に対応して、進行路が曲率半径Rφの小さいものと推定することなり、急激な旋回運転にも充分に対応して進行路の推定を適切に行うことができる。
【0035】一方、上記走行路推定手段12による走行路推定は、図8に示すサブルーチンに従って行われる。尚、前提条件として、直線路では横すべり角が発生しないこと、直線路では白線部に対する車体姿勢角は微小であること、曲線路では走行軌跡は車線を平行移動したものと考える。また、座標は、道路面上の車両を原点とし、車両の前後方向をx軸として前方を正にとり、左右方向をy軸として左方を正にとったものを考える。
【0036】具体的には、図8において、スタートすると、まず、画像(画像データ)が取り込まれ(ステップS21)、二値化のしきい値が設定され(ステップS22)、それから各画素の輝度がしきい値を越えるか否かで1又は0の二値化処理される(ステップS23)。
【0037】それから、左右の白線部に対応するように左右のスキャンウインドウが設定され(ステップS24)、それに続いて、自動車の前後方向のスキャンピッチが設定され(ステップS25)、スキャンウインドウ内をスキャンピッチに従って走査し白線候補点(即ち二値化処理で1とされた点)が検出され(ステップS26)、逆透視変換により平面座標への変換がなされる(ステップS27)。
【0038】それから、白線候補点に、仮想候補点を加えて左右白線部に基づき走行路が推定され(ステップS28)、リターンする。
【0039】走行路の推定は、白線候補点、仮想候補点を用いて左右の白線部について最小二乗法による近似曲線(y=ax2+bx+c)、具体的には左白線部についての2次曲線の係数aL,bL,cL、右白線部についての2次曲線の係数aR,bR,cRが算出される。ここで、より前方まで検出しないといけないという要求から、2次曲線(y=ax2+bx+c)により近似しており、係数aL,aRは、2次近似曲線の曲率半径をRL (RR )とすると、a=1/2RL (1/2RR )となり、係数bL,bRは白線に対して車両のなす角度、係数cL,cRは車両中心から白線までの横偏差量を表わすことになる。
参考例2本参考例は、走行レーン中心線に対して自車両の進行方向がなす角であるヨー角を考慮して、自車両が走行レーンから逸脱する状況下にあるか否かを判定するものである。
【0040】コントロールユニット3Aは、図9に示すように、走行路推定手段12の出力を受け、走行レーン中心線に対して自車両の進行方向がなす角であるヨー角を検出するヨー角検出手段14を備え、逸脱判定手段13が、ヨー角を考慮して、自車両の上記走行レーンに対する逸脱を判定するようになっている。
【0041】コントロールユニット3Aの制御の流れは、図10に示すように行われる。
【0042】図10において、スタートすると、画像処理ユニット4より白線情報が入力され(ステップS31)、左右の白線の曲率半径RR ,RL が演算され(ステップS32)、それらを平均して平均曲率半径RA を演算する(ステップS33)。
【0043】それから、左右白線に基づき走行レーン中心線(車線中央ライン)が決定される(ステップS34)。それに続いて走行レーン中心線に対して自車両の進行方向がなす角であるヨー角αが演算され(ステップS35)、車速V及び舵角θH が読み込まれ(ステップS36)。自車両の進行路が推定され(ステップS37)、自車両の進行路の曲率半径Rφが演算される(ステップS38)。尚、ヨー角αは、走行レーン中心線に対し右側に自車両が向く場合を正とする。
【0044】その後、ヨー角αが正であるか否かを判定し(ステップS39)、正であれば、上記曲率半径の差RφーRA が正であるか否かが判定され(ステップS40)、正であれば(図11参照)、車線逸脱の可能性があるので、警報を出し(ステップS41)、リターンする一方、正でなければ、警報をOFFとして(ステップS42)、リターンする。
【0045】一方、ヨー角αが正でないときは、上記曲率半径の差RφーRA が負であるか否かが判定され(ステップS43)、負であれば(図12参照)、車線逸脱の可能性があるので、警報を出し(ステップS41)、リターンする一方、負でなければ、警報をOFFとして(ステップS44)、リターンする。
実施例次に、本発明の実施例を説明する。
【0046】本実施例は、高速道路等の穏やかに走行できる道路の走行時において、運転者は通常自車両の所定距離前方を注視しており、その付近を基準にして自車両が進行しようとする走行路上のラインに、自車両の進行方向(進行路)を一致させようと操舵することを利用したものである。
【0047】コントロールユニット3Bは、図13に示すように、走行路推定手段12の出力を受け、自車両の所定距離Lm 前方において走行路の中央ラインの接線と自車両中心軸とがなす交差角度δを検出する角度検出手段15を備え、逸脱判定手段13が、角度検出手段15の出力を受け、交差角度δに基づき、自車両の走行レーンに対する逸脱を判定するように構成されている。
【0048】具体的な制御は、図14に示す通りである。
【0049】スタートすると、CCDカメラ2より画像処理ユニット6を通じて白線情報が入力され(ステップS51)、走行レーンの左右側縁である白線が推定され、それに基づき走行レーンの中央ライン(車線中央ライン)が決定される(ステップS52)。
【0050】それから、自車両前方の距離Lm における中央ラインに対する接線と自車両中心軸とのなす交差角度δが演算され(ステップS53)、その交差角度δが所定角δ0 よりも大きいか否かが判定される(ステップS54)。尚、距離Lm 、交差角度δ等の関係は図15に示す通りである。所定角δ0 次の式
【0051】
【数8】
【0052】交差角度δが所定角度δ0 よりも大きければ、自車両が走行レーンから逸脱する可能性があるので、警報が出力され(ステップS55)、大きくなければ警報を出すことなく(ステップS56)、リターンする。
【0053】上記実施例では、自車両前方の距離Lm における中央ラインに対する接線と自車両中心軸とのなす交差角度δに基づいて判断するようにしているが、それに代えて、式
【0054】
【数9】
【0055】この場合は、コントロ−ルユニット3Cは、図16に示すように、走行路推定手段12の出力を受け、走行路の白線と、自車両中心軸とがなす交差角度である第1角度を検出する第1角度検出手段15Aと、進行路推定手段11の出力を受け、自車両の進行方向と自車両中心軸とがなす交差角度である第2角度を検出する第2角度検出手段16とを備え、逸脱判定手段13が、上記第1及び第2角度検出手段の出力を受け、第1及び第2角度の相違に基づき、自車両の走行レーンに対する逸脱を判定するようになっている。
参考例3ここで、さらに別の参考例を記載しておく。
【0056】本参考例は、自車両前方の走行路の白線までの直線距離、該直線距離の時間に対する変化率に基づいて、自車両が逸脱方向に移動しているか、逸脱回避方向に移動しているかを判断するものである。
【0057】コントロ−ルユニット3Dは、図17に示すように、走行路推定手段12の出力を受け、自車両前方の走行路の白線までの直線距離を検出する距離検出手段17と、上記走行路推定手段12の出力を受け、自車両前方の走行路の白線までの直線距離の、時間に対する変化率を検出する変化率検出手段18を備え、逸脱判定手段13が、距離検出手段17及び変化率検出手段18の出力を受け、自車両前方の走行路の白線までの直線距離及びその距離の、時間に対する変化率に基づき、自車両の走行レーンに対する逸脱を判定するように構成されている。
【0058】図18において、スタートすると、白線情報が入力され(ステップS61)、白線と自車両中心延長線との、自車両前方での交点Q(図19では交点Q1 〜Q3、それに対応する距離L1 〜L3 を図示)が演算され(ステップS62)、上記交点Qと自車両との距離Lが演算され(ステップS63)、それから、距離L及びその変化率dL/dt より、図20に示すマップにおいて、しきい値ラインMより下にあるか否かが判定され(ステップS64)、下にあれば、警報が出され(ステップS65)、リターンする。一方、下になければ、警報をOFFして(ステップS66)、リターンする。
【0059】従って、白線から離れた位置にあっても白線に接近する方向に移動していれば、警報が出力されるが、白線付近の位置にあっても白線から離れる方向に移動していれば、警報は出力されてないことになる。
【0060】
【発明の効果】請求項1に係る発明は、走行路の白線と自車両中心軸とがなす交差角度に基づき、逸脱判定手段によって、自車両が走行レーンから逸脱する状況下にあるか否かを判定するようにしたので、自車両が走行レーンから逸脱する状況下にあるか否かを容易に判定でき、走行レーンからの逸脱を予測することができる。よって、走行レーンからの逸脱判定を精度よく行うことができる。
【0061】請求項2に係る発明は、走行路の白線と自車両中心軸とがなす交差角度である第1角度と、自車両の進行方向と自車両中心軸とがなす交差角度である第2角度に基づき、逸脱判定手段によって、自車両が走行レーンから逸脱する状況下にあるか否かを判定するようにしたので、自車両が走行レーンから逸脱する状況下にあるか否かを容易にかつ精度よく判定でき、走行レーンからの逸脱を予測することができる。
【図面の簡単な説明】
【図1】自動車の斜視図である。
【図2】制御系のブロック図である。
【図3】参考例1のコントロールユニットのブロック図である。
【図4】参考例1の制御の流れを示す流れ図である。
【図5】車速V、距離d1 、車線幅Wとしきい値との関係を示す図である。
【図6】作用の説明図である。
【図7】進行路推定のサブルーチンを示す図である。
【図8】進行路推定のサブルーチンを示す図である。
【図9】参考例2のコントロールユニットのブロック図である。
【図10】参考例2の制御の流れを示す流れ図である。
【図11】作用の説明図である。
【図12】作用の説明図である。
【図13】実施例のコントロールユニットのブロック図である。
【図14】実施例の制御の流れを示す流れ図である。
【図15】作用の説明図である。
【図16】変形例のコントロールユニットのブロック図である。
【図17】参考例3のコントロールユニットのブロック図である。
【図18】参考例3の制御の流れを示す流れ図である。
【図19】作用の説明図である。
【図20】マップの説明図である。
【符号の説明】
1 自動車(自車両)
2 CCDカメラ
3 コントロールユニット
3A〜3C コントロールユニット
11 進行路推定手段
12 走行路推定手段
13 逸脱判定手段
15 角度検出手段
15A 第1角度検出手段
16 第2角度検出手段
【特許請求の範囲】
【請求項1】 自車両が現在走行している走行レーンから逸脱するのを予測する自動車の走行状態判定装置であって、道路面上の白線に基づき走行路を推定する走行路推定手段と、該走行路推定手段の出力を受け、自車両から所定距離前方の走行路の白線と、自車両中心軸とがなす交差角度を検出する角度検出手段と、該角度検出手段の出力を受け、上記走行路の白線と自車両中心軸とがなす交差角度に基づき、自車両の走行レーンに対する逸脱を判定する逸脱判定手段とを備え、上記逸脱判定手段は、少なくとも自車両の車速、走行レーンの幅及び自車両の走行レーン内の位置に基づいてしきい値を設定して、上記交差角度の該しきい値に対する大きさ比較により、自車両の走行レーンに対する逸脱を判定するように構成されていることを特徴とする自動車の走行状態判定装置。
【請求項2】 自車両が現在走行している走行レーンから逸脱するのを予測する自動車の走行状態判定装置であって、道路面上の白線に基づき走行路を推定する走行路推定手段と、舵角、車速等の車両状態量に基づき自車両の進行路を推定する進行路推定手段と、上記走行路推定手段の出力を受け、走行路の白線と、自車両中心軸とがなす交差角度である第1角度を検出する第1角度検出手段と、上記進行路推定手段の出力を受け、自車両の進行方向と、自車両中心軸とがなす交差角度である第2角度を検出する第2角度検出手段と、上記第1及び第2角度検出手段の出力を受け、第1及び第2角度の相違に基づき、自車両の走行レーンに対する逸脱を判定する逸脱判定手段とを備えることを特徴とする自動車の走行状態判定装置。
【請求項1】 自車両が現在走行している走行レーンから逸脱するのを予測する自動車の走行状態判定装置であって、道路面上の白線に基づき走行路を推定する走行路推定手段と、該走行路推定手段の出力を受け、自車両から所定距離前方の走行路の白線と、自車両中心軸とがなす交差角度を検出する角度検出手段と、該角度検出手段の出力を受け、上記走行路の白線と自車両中心軸とがなす交差角度に基づき、自車両の走行レーンに対する逸脱を判定する逸脱判定手段とを備え、上記逸脱判定手段は、少なくとも自車両の車速、走行レーンの幅及び自車両の走行レーン内の位置に基づいてしきい値を設定して、上記交差角度の該しきい値に対する大きさ比較により、自車両の走行レーンに対する逸脱を判定するように構成されていることを特徴とする自動車の走行状態判定装置。
【請求項2】 自車両が現在走行している走行レーンから逸脱するのを予測する自動車の走行状態判定装置であって、道路面上の白線に基づき走行路を推定する走行路推定手段と、舵角、車速等の車両状態量に基づき自車両の進行路を推定する進行路推定手段と、上記走行路推定手段の出力を受け、走行路の白線と、自車両中心軸とがなす交差角度である第1角度を検出する第1角度検出手段と、上記進行路推定手段の出力を受け、自車両の進行方向と、自車両中心軸とがなす交差角度である第2角度を検出する第2角度検出手段と、上記第1及び第2角度検出手段の出力を受け、第1及び第2角度の相違に基づき、自車両の走行レーンに対する逸脱を判定する逸脱判定手段とを備えることを特徴とする自動車の走行状態判定装置。
【図1】

【図11】
【図12】
【図2】
【図5】
【図6】
【図3】
【図8】
【図15】
【図19】
【図7】
【図20】
【図4】
【図9】
【図13】
【図10】
【図14】
【図16】
【図17】
【図18】
【図11】
【図12】
【図2】
【図5】
【図6】
【図3】
【図8】
【図15】
【図19】
【図7】
【図20】
【図4】
【図9】
【図13】
【図10】
【図14】
【図16】
【図17】
【図18】
【特許番号】特許第3508213号(P3508213)
【登録日】平成16年1月9日(2004.1.9)
【発行日】平成16年3月22日(2004.3.22)
【国際特許分類】
【出願番号】特願平6−144359
【出願日】平成6年6月27日(1994.6.27)
【公開番号】特開平8−16998
【公開日】平成8年1月19日(1996.1.19)
【審査請求日】平成13年3月27日(2001.3.27)
【出願人】(000003137)マツダ株式会社 (6,115)
【参考文献】
【文献】特開 平5−126591(JP,A)
【文献】特開 平6−20189(JP,A)
【文献】特開 平6−4799(JP,A)
【文献】特開 平5−178115(JP,A)
【文献】特開 昭63−214900(JP,A)
【登録日】平成16年1月9日(2004.1.9)
【発行日】平成16年3月22日(2004.3.22)
【国際特許分類】
【出願日】平成6年6月27日(1994.6.27)
【公開番号】特開平8−16998
【公開日】平成8年1月19日(1996.1.19)
【審査請求日】平成13年3月27日(2001.3.27)
【出願人】(000003137)マツダ株式会社 (6,115)
【参考文献】
【文献】特開 平5−126591(JP,A)
【文献】特開 平6−20189(JP,A)
【文献】特開 平6−4799(JP,A)
【文献】特開 平5−178115(JP,A)
【文献】特開 昭63−214900(JP,A)
[ Back to top ]