
自動車レーダーシステム、自動車レーダーによって出力レーダー波形として送信される掃引パターンを求める方法、及び該方法のコンピュータープログラム製品
【課題】受信された信号内の干渉のタイプを求めるための干渉分類器を備える自動車レーダーシステムを提供する。
【解決手段】1つ又は複数の他のユーザーによって生成されたバースト雑音、周波数チャープ信号、又はそれらの組み合わせを含む雑音信号を受信する受信機102と、複数の異なる周波数掃引信号を生成する信号発生器109,110と、各周波数掃引信号を受信雑音信号と結合して周波数掃引信号毎に結合信号を生成する信号結合器104と、該周波数チャープ信号を含む受信雑音信号に対応する結合信号の雑音レベルを求める干渉分類器203と干渉分類器203によって求められた雑音レベルに従って複数の周波数掃引信号を選択するように動作可能なセレクター206と、出力レーダー波形として送信される、選択された複数の周波数掃引信号を含む掃引パターンを求める制御ユニット206とを備える。
【解決手段】1つ又は複数の他のユーザーによって生成されたバースト雑音、周波数チャープ信号、又はそれらの組み合わせを含む雑音信号を受信する受信機102と、複数の異なる周波数掃引信号を生成する信号発生器109,110と、各周波数掃引信号を受信雑音信号と結合して周波数掃引信号毎に結合信号を生成する信号結合器104と、該周波数チャープ信号を含む受信雑音信号に対応する結合信号の雑音レベルを求める干渉分類器203と干渉分類器203によって求められた雑音レベルに従って複数の周波数掃引信号を選択するように動作可能なセレクター206と、出力レーダー波形として送信される、選択された複数の周波数掃引信号を含む掃引パターンを求める制御ユニット206とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、干渉の効果を検出及び抑制する際に用いるための自動車レーダーシステム及び方法に関する。開示されるシステム及び方法は、同じ領域において動作すると共に同じ周波数帯域を共有する他の周波数変調連続波システム(frequency modulated continuous-wave)(FMCW)によって生じる干渉へのFMCW自動車レーダーの耐性を改善するのに特に適用可能である。
【0002】
[優先権の主張]
本出願は、2010年5月27日に出願された欧州特許出願第10164048.0号の優先権を主張するものであり、該特許文献は相互参照によりその全体が本明細書に援用される。
【背景技術】
【0003】
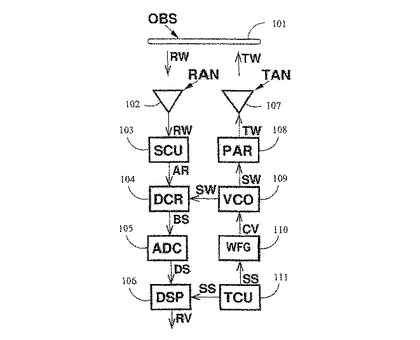
図1は、従来の周波数変調連続波(frequency modulated continuous-wave)(FMCW)自動車レーダーの簡略化された機能ブロック図である。
【0004】
システムは、受信アンテナRAN102と、信号調整ユニットSCU103と、ダウンコンバーターDCR104と、アナログ/デジタルコンバーターADC105と、デジタルシグナルプロセッサDSP106と、タイミング/制御ユニットTCU111と、波形発生器WFG110と、アップコンバーターとしても機能する電圧制御発振器VCO109と、電力増幅器/駆動装置PAR108と、送信アンテナTAN107とを備える。
【0005】
波形発生器WFG110は、制御信号CVを供給して、電圧制御発振器VCO109に周波数上方掃引及び下方掃引を生じさせる。結果としての各波形SWは電力増幅器/駆動装置PAR108において増幅され、プロービング波形TWが生じる。アンテナTAN107によって送信される波形TWは一定の振幅を有するが、その周波数は、各上方掃引又は下方掃引時間間隔Ts中に帯域Δfを掃引する。
【0006】
距離Rにおける障害物OBS101からのエコーRWは、時間において(2R/c)だけ遅延された送信波形TWの減衰されたコピーである。ここでcは光速である。
【0007】
エコーRWは、信号調整ユニットSCU103において適切に処理され、反射信号の表現ARが生成される。信号ARは、ダウンコンバーターDCR104において、電圧制御発振器VCO109によって供給された送信波形TWのコピーSWと結合される。ダウンコンバーターDCR104の出力信号BSはまず、アナログ/デジタルコンバーターADC105においてデジタル形式DSに変換され、次にデジタルシグナルプロセッサDSP106に送信される。
【0008】
デジタルシグナルプロセッサDSP106は、タイミング/制御ユニットTCU111から、各周波数掃引のパラメーター、すなわち該周波数掃引の開始時刻、掃引持続時間TS、及び掃引周波数帯域Δfを示す信号SSを受信する。信号SSは、波形発生器WFG110によって、要求される制御信号CVを生成するのにも用いられる。
【0009】
デジタルシグナルプロセッサDSP106は、ダウンコンバーターDCR104から受信したビート信号BSを解析することによって、障害物OBS101の距離R及び速度Vを求める。ビート信号BSは、送信波形TWの対応する線形周波数掃引SWに応じて取得される。ビート周波数は反射波RWの周波数から送信波TWの周波数を減算したものとして規定される。
【0010】
静止した障害物OBS101の場合、ビート周波数の大きさ|fR|は障害物距離Rに直接比例する。
【0011】
【数1】

【0012】
ここで、|SF|=|Δf|/TSは周波数掃引の勾配である。ビート周波数fRは周波数下方掃引(SF<0)の場合に正であり、周波数上方掃引s(SF>0)の場合に負である。正のビート周波数と負のビート周波数との識別は、直交信号ダウンコンバージョンを用いることによって達成することができる。
【0013】
レーダーと障害物OBS101との間の半径方向速度Vを有する相対運動は、ドップラー周波数シフト
【0014】
【数2】
【0015】
を付加することによって「距離によって生成された(range-generated)」ビート周波数fRを変更する。ここで、λは送信波形TWの波長である。実際に、ドップラーシフトfVの値は、掃引された周波数の量による影響を受けない。
【0016】
障害物OBS101が速度Vでレーダーに接近している場合、ドップラーシフトfVの値は正になるのに対し、障害物OBS101がレーダーから遠ざかっている場合、ドップラーシフトfVの値は負となる。その結果、観測されるビート周波数fBは2つの周波数成分fR及びfVを結合したものから生じ、したがって、
【0017】
【数3】
【0018】
である。
【0019】
勾配SF自体は負となることもできるし(下方掃引の場合)、正となることもできる(上方掃引の場合)ことに留意する。
【0020】
単一の動いている障害物OBS101の場合、障害物の距離R及び相対速度Vの双方を一意に求めるために、実質的に異なる勾配SFを有する少なくとも2つの周波数掃引が必要とされる。しかしながら、レーダーの視野(FOV)内に2つ以上の障害物が存在する場合、各障害物の距離及び速度を正しく求めるために、別個の勾配を有する、より多くの周波数掃引が必要となる。
【0021】
上記の検討から、障害物の距離及び速度に関する情報は、複数のビート信号の周波数成分内に含まれることになり、そのような各ビート信号は、レーダーによって送信された対応する周波数掃引に応じて取得される。
【0022】
したがって、デジタルシグナルプロセッサDSPによって実行される信頼性のある周波数推定が最も重要である。
【0023】
非特許文献1において提示される分析は、自動車レーダーにおいて一般に使用される掃引パターン及び関連する信号処理技法が全てマルチユーザー干渉の影響を受けることを示した。
【0024】
したがって、マルチユーザー環境内で動作する既知の自動車FMCWレーダーシステムは、マルチユーザー干渉によって生じる問題に起因して、信頼性のない障害物検出、並びに距離及び速度の不良な推定を提供している。
【先行技術文献】
【非特許文献】
【0025】
【非特許文献1】G. M. Brooker「Mutual Interference of Millimeter-Wave Radar Systems」(IEEE Trans. Electromagn. Compat., pp. 170-181, Feb. 2007)
【発明の概要】
【発明が解決しようとする課題】
【0026】
本発明者らは、人工的な干渉を自然発生的な干渉から区別し、そして人工的な干渉を回避及び/又は抑制する手段を講じることによって、自動車FMCWレーダーシステムにおける距離及び速度の推定を劇的に改善することができるということに気がついた。
【課題を解決するための手段】
【0027】
したがって、概して、本発明は、受信信号を処理して、周波数チャープを含む干渉(すなわち人工的な雑音)を識別するように動作可能であると共に、識別された周波数が干渉することになる周波数における送信を少なくとも部分的に回避するように、出力レーダー波形の送信に用いられる周波数掃引信号を設定するようにさらに動作可能な自動車レーダーシステムを提供する。
【0028】
より詳細には、人工的な信号の他のソースを有する環境において、出力レーダー波形として送信される掃引パターンを求めるように動作可能な自動車レーダーシステムであって、
背景雑音、又は背景雑音と1つ若しくは複数の他のソースからの干渉信号との組み合わせを含む雑音信号を受信するように動作可能な受信機と、
複数の異なる周波数掃引信号を生成するように動作可能な信号発生器と、
各周波数掃引信号を受信雑音信号と共に処理して、該周波数掃引信号毎に処理された信号を生成するように動作可能なシグナルプロセッサと、
別のソースからの干渉信号を含む1つ又は複数の受信雑音信号に対応する処理された信号を検出すると共に、該別のソースからの干渉信号を含む1つ又は複数の前記受信雑音信号に対応する特定され処理された信号のそれぞれの雑音レベルを求めるように動作可能な干渉分類器と、
前記干渉分類器によって求められた前記雑音レベルに従って複数の前記周波数掃引信号を選択するように動作可能なセレクターと、
前記選択された複数の周波数掃引信号に基づいて送信される出力レーダー波形のための掃引パターンを求めるように動作可能な制御ユニットと、
を備える、システムが提供される。
【0029】
好ましくは、前記自動車レーダーシステムは、
パッシブモードとアクティブモードとの間で前記自動車レーダーシステムの前記動作を変更する手段をさらに備え、
前記パッシブモードにおいて、前記自動車レーダーシステムは、1つ又は複数の受信雑音信号から出力波形のための掃引パターンを求めるようになっており、
前記アクティブモードにおいて、前記自動車レーダーシステムは、パッシブ動作モードにおいて求められた前記掃引パターンを含む出力波形信号を送信すると共に、該送信された出力波形の反射を含む受信信号を処理するようになっている。
【0030】
好ましくは、前記自動車レーダーシステムは、
データのフレームを格納するように構成される格納手段であって、各フレームはそれぞれの周波数掃引信号のための処理された信号に対応する、格納手段と、
フレームの前記データに信号ブランキングを適用するように動作可能なブランキング回路と、
をさらに備え、
前記アクティブモードにおいて、前記ブランキング回路は前記周波数掃引信号のための処理された信号に対応するフレームを処理し、該フレームを所定のサイズのデータブロックにスライスして、該フレーム内の該データブロックのレベルを求めると共に、該データブロックの該レベルが所定のレベルを超えている場合、該データブロックにブランキングを適用するように動作可能であり、
前記自動車レーダーシステムは、前記ブランキングが適用された1つ又は複数のフレームに依拠して物体の距離及び速度のうちの少なくとも一方を検出するようになっている。
【0031】
好ましくは、前記干渉分類器は前記周波数掃引信号毎に処理された信号のサンプルを処理するように動作可能であり、
該干渉分類器は、
前記信号サンプルを用いて前記処理された信号のためのスケールファクターを計算するように動作可能なスケールファクター計算機と、
前記スケールファクターを用いて前記信号サンプルを正規化することによって、正規化信号サンプルyを計算するように動作可能な正規化器と、
前記正規化信号サンプルに対し非線形変換T(y)を実行して、変換された信号サンプルを計算するように動作可能な非線形変換器と、
前記変換された信号サンプルの平均を計算するように動作可能な平均化回路と、
前記変換された信号サンプルの前記計算された平均を所定の閾値レベルと比較して、前記処理された信号内に存在する前記雑音のタイプがマルチユーザー環境からの干渉信号を含むか否かを判断する(すなわち、存在する雑音のタイプが周波数チャープ信号であるか否かを判断する)ように動作可能な比較器と、
を備え、
前記非線形変換器は、第1の関数T1(y)及び第2の関数T2(y)の組み合わせを含む非線形変換T(y)を実行するように動作可能であり、前記第1の関数は遷移値ytを超えない値を有する正規化信号サンプルに適用される変換を規定し、前記第2の関数は、遷移値yt以上の値を有する正規化信号サンプルに適用される変換を規定し、
T1(y)は正規化信号サンプル値の増加に対する非減少関数であり、
T2(y)は正規化信号サンプル値の増加に対する減少関数であり、
遷移値は1.3≦yt≦1.7の範囲の値を有する。
【0032】
好ましくは、前記第1の関数T1(y)は正規化信号サンプル値の増加に対する増加関数であり、T1(y)の平均勾配の大きさはT2(y)の平均勾配の大きさよりも小さい。
【0033】
好ましくは、前記干渉分類器の前記スケールファクター計算機は、前記信号サンプルの平均絶対偏差(mean absolute deviation)であるスケールファクターを計算するように動作可能であり、前記非線形変換器は、条件付き確率p(y|N1)及びp(y|N2)の比を共同で近似する第1の関数T1(y)及び第2の関数T2(y)の組み合わせを含む非線形変換T(y)を実行するように動作可能であり、ここで
【0034】
【数4】
【0035】
であり、
p(y|N2)は雑音レベルに依存する関数
【0036】
【数5】
【0037】
の表現であり、
N1はバースト雑音であり、N2は周波数チャープ信号を含む干渉である。
【0038】
好ましくは、前記干渉分類器の前記スケールファクター計算機は、前記信号サンプルの標準偏差であるスケールファクターを計算するように動作可能であり、前記非線形変換器は、条件付き確率p(y|N1)及びp(y|N2)の比を共同で近似する第1の関数T1(y)及び第2の関数T2(y)の組み合わせを含む非線形変換T(y)を実行するように動作可能であり、ここで
【0039】
【数6】
【0040】
であり、
【0041】
p(y|N2)は雑音レベルに依存する関数
【0042】
【数7】
【0043】
の表現であり、
N1はバースト雑音であり、N2は周波数チャープ信号を含む干渉である。
【0044】
好ましくは、前記干渉分類器の前記スケールファクター計算機は、前記スケールファクターとして、前記信号サンプルの平均絶対偏差、標準偏差、幾何平均、中央値、及びトリム平均のうちの1つを計算するように動作可能である。
【0045】
好ましくは、前記干渉分類器の前記正規化器は、各信号サンプルの大きさを求めるように動作可能であると共に、該正規化信号サンプルの大きさを前記スケールファクターで除算することによって、前記正規化信号サンプルyを計算するように動作可能である。
【0046】
好ましくは、前記干渉分類器の前記非線形変換器は非線形変換を実行するように動作可能であり、該非線形変換において、前記第1の関数T1(y)はローレンツ関数を含み、前記第2の関数T2(y)は放物線を含む。
【0047】
好ましくは、前記スケールファクター計算機及び前記非線形変換器は、複数の異なるタイプのスケールファクターを計算し、複数の異なる非線形変換を適用するようにそれぞれ動作可能であり、前記スケールファクター計算器及び前記非線形変換器は、被試験受信信号に適用される正規化のタイプを規定する入力制御信号に依拠して、異なるタイプのスケールファクター及び異なる非線形変換間で選択するように構成される。
【0048】
好ましくは、前記処理された信号を検出するプロセスは、分類された雑音のレベルを示す信号を出力するプロセスを含む。
【0049】
本発明は、複数の干渉源からなる環境において自動車レーダーによって出力レーダー波形として出力される掃引パターンを求める方法であって、
背景雑音、又は背景雑音と前記環境内の1つ若しくは複数の他のソースからの干渉信号との組み合わせを含む1つ又は複数の雑音信号を受信するプロセスと、
複数の異なる周波数掃引信号を生成するプロセスと、
各周波数掃引信号を受信雑音信号と共に処理して、該周波数掃引信号毎に処理された信号を生成するプロセスと、
別のソースからの干渉信号を含む1つ又は複数の受信雑音信号に対応する処理された信号を検出すると共に、該別のソースからの干渉信号を含む前記受信雑音信号に対応する各前記検出された処理された信号のそれぞれの雑音レベルを求めるプロセスと、
前記別のソースからの干渉信号を含む前記1つ又は複数の前記受信雑音信号に対応する前記処理された信号の前記求められた雑音レベルに従って、複数の前記周波数掃引信号を選択するプロセスと、
前記選択された複数の周波数掃引信号に依拠して送信される出力レーダー波形のための掃引パターンを求めるプロセスと、
を含む、方法も提供する。
【0050】
好ましくは、本方法は、パッシブモードとアクティブモードとの間で切り換えるプロセスをさらに含み、
前記パッシブモードにおいて、1つ又は複数の受信雑音信号から出力波形のための掃引パターンが求められ、
前記アクティブモードにおいて、先行するパッシブモード動作において求められた前記周波数掃引パターンを含む出力波形が送信され、該送信された出力波形の反射を含む受信信号が処理される。
【0051】
好ましくは、前記アクティブモードは、
データのフレームを格納するプロセスであって、各フレームはそれぞれの周波数掃引信号のための処理された信号に対応する、格納するプロセスと、
周波数掃引信号のための処理された信号に対応するフレームを処理するプロセスであって、前記フレームをデータブロックにスライスして、該フレーム内の該データブロックのレベルを求めると共に、該データブロックの該レベルが所定のレベルを超えている場合、該データブロックのデータにブランキングを適用する、処理するプロセスと、
前記ブランキングが適用された少なくとも1つのフレームに依拠して物体の距離及び速度のうちの少なくとも一方を検出するプロセスと、
を含む。
【0052】
好ましくは、前記マルチユーザー環境からの前記干渉信号を含む前記受信雑音信号に対応する処理された信号を検出する分類プロセスは、
前記処理された信号の信号サンプルを用いることであって、該処理された信号のためのスケールファクターを計算する、用いること、
前記スケールファクターを用いて前記受信信号サンプルを正規化することによって、正規化信号サンプルyを計算すること、
前記正規化信号サンプルyに対し非線形変換T(y)を実行することであって、変換された信号サンプルを計算する、実行すること、
前記変換された信号サンプルの平均を計算すること、及び
前記変換された信号サンプルの前記計算された平均を所定の閾値レベルと比較することであって、前記処理された信号内に存在する前記雑音のタイプが、前記マルチユーザー環境からの前記干渉信号を含むか否かを判断する(すなわち、存在する雑音のタイプが周波数チャープ信号であるか否かを判断する)、比較すること、
を含み、
前記非線形変換T(y)は、第1の関数T1(y)及び第2の関数T2(y)の組み合わせを含み、前記第1の関数は遷移値ytを超えない値を有する正規化信号サンプルに適用される変換を規定し、前記第2の関数は、遷移値yt以上の値を有する正規化信号サンプルに適用される変換を規定し、
T1(y)は正規化信号サンプル値の増加に対する非減少関数であり、
T2(y)は正規化信号サンプル値の増加に対する減少関数であり、
遷移値ytは1.3≦yt≦1.7の範囲の値を有する。
【0053】
好ましくは、前記分類プロセスにおいて、前記第1の関数T1(y)は正規化信号サンプル値の増加に対する増加関数であり、T1(y)の平均勾配の大きさはT2(y)の平均勾配の大きさよりも小さい。
【0054】
好ましくは、前記分類プロセスにおいて、前記スケールファクターは前記信号サンプルの平均絶対偏差であり、前記非線形変換T(y)は、条件付き確率p(y|N1)及びp(y|N2)の比を共同で近似する第1の関数T1(y)及び第2の関数T2(y)の組み合わせを含み、ここで
【0055】
【数8】
【0056】
であり、
p(y|N2)は雑音レベルに依存する関数
【0057】
【数9】
【0058】
の表現であり、
N1はバースト雑音であり、N2は周波数チャープ信号を含む干渉である。
【0059】
好ましくは、前記分類プロセスにおいて、前記スケールファクターは前記信号サンプルの標準偏差であり、前記非線形変換T(y)は、条件付き確率p(y|N1)及びp(y|N2)の比を共同で近似する第1の関数T1(y)及び第2の関数T2(y)の組み合わせを含み、ここで
【0060】
【数10】
【0061】
であり、
【0062】
p(y|N2)は雑音レベルに依存する関数
【0063】
【数11】
【0064】
の表現であり、
N1はバースト雑音であり、N2は周波数チャープ信号を含む干渉である。
【0065】
好ましくは、前記信号サンプルを用いてスケールファクターを計算するプロセスは、前記スケールファクターとして、前記信号サンプルの平均絶対偏差、標準偏差、幾何平均、中央値、及びトリム平均のうちの1つを計算することを含む。
【0066】
好ましくは、前記正規化信号サンプルを計算するプロセスは、各信号サンプルの大きさを求めると共に、該信号サンプルの大きさを前記スケールファクターで除算することによって、前記正規化信号サンプルを計算することを含む。
【0067】
好ましくは、前記非線形変換を実行するプロセスにおいて、該非線形変換の前記第1の関数T1(y)はローレンツ関数を含み、該非線形変換の前記第2の関数T2(y)は放物線を含む。
【0068】
本発明は、プログラム可能な処理装置をプログラムして、上述した方法を実行するように動作可能になるようにするコンピュータープログラム命令を担持する、ストレージ媒体、ストレージデバイス、又は信号等のコンピュータープログラム製品も提供する。
【図面の簡単な説明】
【0069】
【図1】従来のFMCW自動車レーダーの単純化された機能ブロック図である。
【図2】本発明の一実施形態による干渉分類器を組み込むFMCW自動車レーダーシステムの機能ブロック図である。
【図3a)】本発明の一実施形態による、パッシブモードで実行される、送信用の複数の周波数掃引信号を求める方法を示すフローチャートである。
【図3b)】本発明の一実施形態による、アクティブモードで実行される、受信信号を送信及び処理する方法を示すフローチャートである。
【図4】雑音によって破損された正弦波の振幅の確率密度関数p(y|C)及び雑音の大きさの確率密度関数p(y|B)の形状を示す図である。
【図5】本発明の一実施形態による、自動車レーダーシステムにおける使用のための干渉分類器のロバストなバージョンにおいて利用される非線形性D(y)の形状を示す図である。
【図6】本発明の一実施形態による、自動車レーダーシステムおける使用のための干渉分類器のロバストなバージョンにおいて利用される非線形性D(y)及びまたその近似を示す図である。
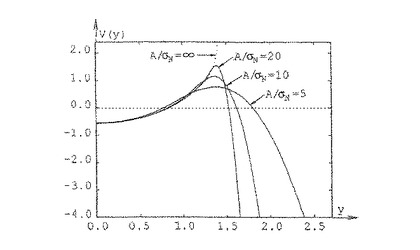
【図7】本発明の一実施形態による、自動車レーダーシステムおける使用のための干渉分類器の最適なバージョンにおいて利用される非線形性V(y)の形状を示す図である。
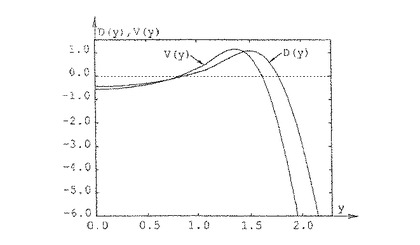
【図8】本発明の一実施形態による、自動車レーダーシステムおける使用のための干渉分類器のロバストなバージョンにおいて利用される非線形性D(y)を、最適なバージョンにおいて利用される非線形性V(y)と共に示す図である。
【図9】本発明の一実施形態による、自動車レーダーシステムにおける使用のための干渉分類器の機能ブロック図である。
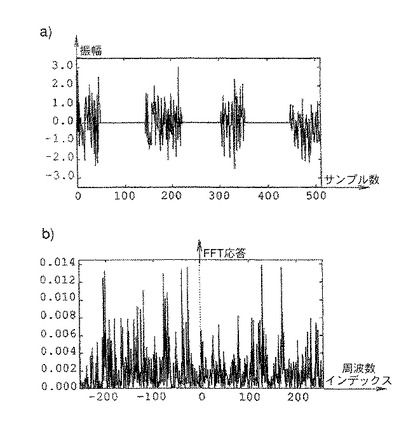
【図10】a)は、背景雑音によって損なわれた3つの正弦波を含むデータフレームを示す図であり、b)は、a)のデータフレームの周波数領域表現を示す図である。
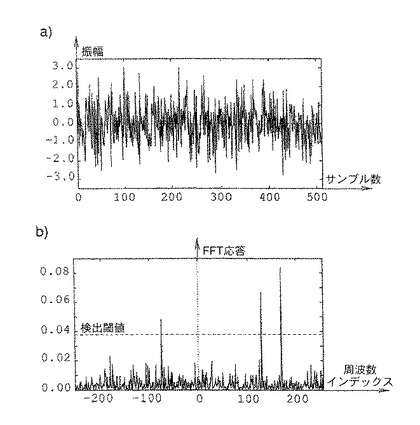
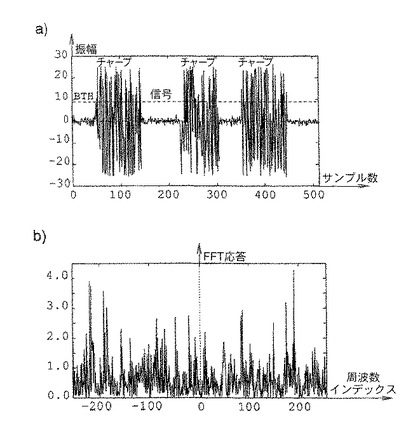
【図11】a)は、背景雑音及びさらに3つの高レベル周波数チャープによって損なわれた3つの正弦波を含むデータフレームを示す図であり、b)は、a)のデータフレームの周波数領域表現を示す図である。
【図12】a)は、背景雑音及びさらに3つの高レベル周波数チャープによって損なわれた3つの正弦波を含む、(ブランキングによって)変更されたデータフレームを示す図であり、b)は、a)のデータフレームの周波数領域表現を示す図である。
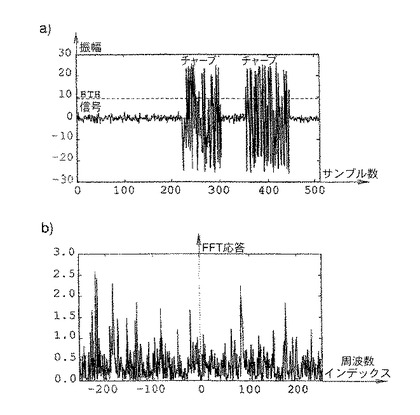
【図13】a)は、背景雑音及びさらに2つの高レベル周波数チャープによって損なわれた3つの正弦波を含むデータフレームを示す図であり、b)は、a)のデータフレームの周波数領域表現を示す図である。
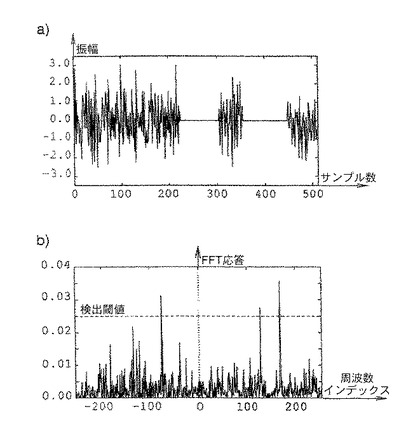
【図14】a)は、背景雑音及びさらに2つの高レベル周波数チャープによって損なわれた3つの正弦波を含む、(ブランキングによって)変更されたデータフレームを表す図であり、b)は、a)のデータフレームの周波数領域表現を示す図である。
【図15】コンピュータープログラム命令を用いて実施されるFMCW自動車レーダーシステムの一実施形態を示す図である。
【発明を実施するための形態】
【0070】
後述するように、本発明の実施形態は、一般に、多くの人工的な送信が位相又は周波数を変調されたパルス正弦波キャリアの形態を有するという、本発明者らの認識を利用する。
非同期サンプリングから取得されたそのような信号の離散時間サンプルは、ランダムな位相を有するサンプリングされた正弦波の統計的特性と同じ統計的特性を有する。一方、一般に、自然現象から生じる信号は、ランダムガウス過程によって表すことができる。これを利用して、観測される信号が、ガウスランダム過程を表すのか、又は周波数チャープ等の様々な位相を有する雑音のある正弦波を表すのかを判定する干渉分類器を有する自動車システムを提供する。
自動車システム自体からの送信とは異なる人工的な送信によって生じる周波数チャープが検出される場合、自動車レーダーシステムは、検出された周波数チャープからの干渉を回避するか又は少なくとも部分的に回避する出力レーダー波形を生成するための周波数掃引信号を選択する。さらに、検出された周波数チャープを用いて、該検出された周波数チャープの干渉効果を抑制するためのパルスブランキング動作を誘導する。
【0071】
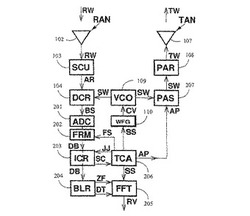
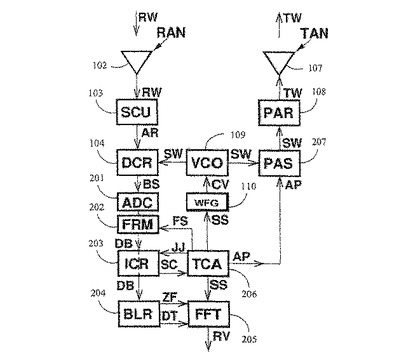
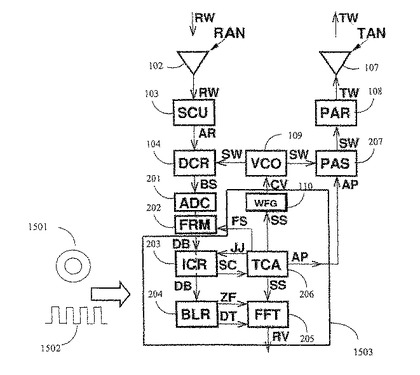
図2は、本発明の一実施形態によるFMCW自動車レーダーシステムの簡略化された機能ブロック図である。
【0072】
自動車レーダーシステムは以下のブロックを含む。
−受信アンテナRAN102、
−信号調整ユニットSCU103、
−ダウンコンバーターDCR104、
−アナログ/デジタルコンバーターADC201、
−フーリエシグナルプロセッサFFT205、
−タイミング/制御/算術ユニットTCA206、
−波形発生器WFG110、
−電圧制御発振器VCO109、
−電力増幅器/駆動装置PAR108、
−送信アンテナTAN107、
−モードスイッチPAS207、
−バッファー/スライサーFRM202、
−干渉分類器ICR203、
−ブランキング回路BLR204。
【0073】
FMCW自動車レーダーは、2つのモード、すなわちパッシブ及びアクティブで交互に動作するようになっている。
【0074】
パッシブモードの目的は、マルチユーザー干渉によって過剰に破損されることのない周波掃引パターンを動的かつ適応的に選択することである。
【0075】
アクティブモードにおいて、自動車レーダーは、図1に示されるような既知のシステムの通常動作を実行することができる。しかしながら、アクティブモードでは、物体の距離及び/又は速度を求めるのを改善するために、受信信号内のデータにブランキングも適用される。
【0076】
パッシブモード
レーダーシステムは、電圧制御発振器VCO109と電力増幅器/駆動装置PAR108との間の信号経路をモードスイッチPAS207がブロッキングしている限り、パッシブオペレーティングモード、すなわち「リスンのみ」オペレーティングモードにとどまる。
【0077】
パッシブモードにおいて、レーダーアンテナTAN102は、周波数掃引を一切送信しない。しかしながら、そのような掃引SWは、依然としてVCO109によって生成され、ダウンコンバーターDCR104に適用される。
【0078】
モードスイッチPAS207は、タイミング/制御/算術ユニットTCA206によって提供される信号APによって制御される。
【0079】
パッシブオペレーティングモード中、フーリエシグナルプロセッサFFT205及びブランキング回路BLR204の双方は、アイドルのままである。
【0080】
TCAユニット206は、適切な信号SSを波形発生器WFG110に適用することによって異なる周波数掃引SWを順次選択し、波形発生器WFG110はそれに応じて、対応する制御信号CVを生成する。
結果として、電圧制御発振器VCO109は一連の別個の周波数掃引SWを生成し、各掃引はその
−開始周波数、
−終了周波数、
−掃引持続時間、
によって特徴付けられる。
【0081】
後述するランク付けの目的で、各異なる周波数掃引SWは掃引インデックスn∈{1,...,N}によって特定される。
【0082】
レーダーは、該レーダーの受信アンテナRAN102によって捕捉された信号を処理することによってマルチユーザー「密信号(dense-signal)」環境を検知する。
受信信号RWは、同じ領域において動作している他の自動車レーダーによって送信された信号及び背景雑音を含む。受信信号RWの表現ARは、電圧制御発振器VCO109によって供給されたN周波数掃引SWと共にダウンコンバーターDCR104において一緒に処理される。
【0083】
ダウンコンバーターDCR104の出力信号BSは、アナログ/デジタルコンバーターADC201においてデジタル形式に変換された後、バッファー/スライサーFRM202内に格納される。バッファー/スライサーFRM202内に格納される各データフレームは、ダウンコンバーターDCR104に適用されるN個の異なる周波数掃引SWのうちの1つに一意に対応する。
【0084】
各データフレームは、TCAユニット206によって供給された制御信号FWに応じて、複数のJ個のデータブロックDBに「スライス」される。結果としてのデータブロックDBは次に、TCAユニット206によって提供される信号JJに応じて、干渉分類器ICR203に順次適用される。
【0085】
分類器ICR203は、チャープ干渉を含むデータブロックを特定し、そのような干渉のレベルを示す信号SCをTCAユニット206に送信する。
【0086】
結果として、TCAユニット206は、データフレーム内の破損したデータブロックの数、及びまたマルチユーザー干渉の総破損エネルギーを求めることができる。この情報は、TCAユニットによって、マルチユーザー干渉に対するその耐性に従って、N個の周波数掃引SWをランク付けするのに用いられる。
【0087】
したがって、パッシブオペレーティングモード中、N個全ての利用可能な周波数掃引SWがマルチユーザーチャープ干渉への耐性の観点から評価される。次に、TCAユニット206は、被試験マルチユーザー環境において良好な測距性能を提供する1つ又は複数の掃引パターンを構築するのに最も良好なM個の掃引を選択する。
【0088】
掃引パターンにおいて用いられるM個の掃引が選択されると、掃引パターンは多くの形で構築することができる。たとえば掃引のランダム順列又は擬似ランダム順列を利用することができる。
【0089】
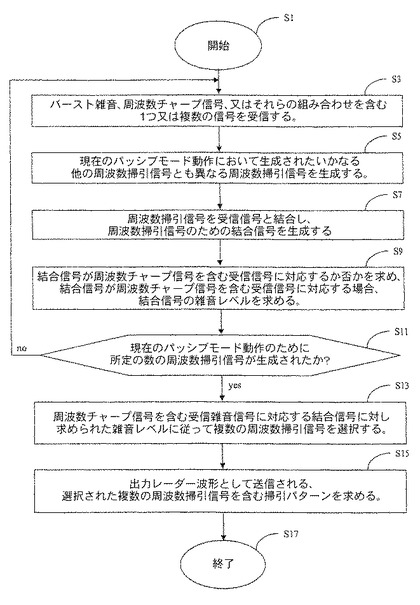
図3a)は本実施形態の自動車レーダーシステムによって掃引パターンを求めるために実行される処理動作を要約するフローチャートである。
【0090】
図3a)を参照すると、ステップS3において、マルチユーザー環境における他のソースからのバースト雑音及び/又は周波数チャープ信号を含む、1つ又は複数の信号が受信される。
【0091】
次に、プロセスはステップS5に進み、ステップS5において、周波数掃引信号が生成される。周波数掃引信号は、現在のパッシブモード動作のために生成されたいかなる他の周波数掃引信号とも異なる。
【0092】
次にプロセスはステップS7に進み、ステップS7において、周波数掃引信号が受信信号と結合され、周波数掃引信号のための結合信号が生成される。
【0093】
次にプロセスはステップS9に進み、ステップS9において、結合信号内の雑音のタイプが求められる。結合信号が周波数チャープ信号を含む受信信号に対応する場合、結合信号の雑音レベルが求められる。
【0094】
次にプロセスはステップS11に進み、ステップS11において、現在のパッシブモード動作のためのさらなる周波数掃引信号が生成されるか否かの判断が行われる。
【0095】
たとえば、パッシブモード動作において生成される周波数掃引信号の所定の数を設定することができる。次に、プロセスはステップS3に戻り、パッシブモード動作のための所定の数の周波数掃引信号が生成されるまで、ステップS3〜S11における処理動作が反復される。
【0096】
現在のパッシブモード動作のための全ての周波数掃引信号が生成されると、プロセスはステップS13に進む。
【0097】
次に、ステップS13において、周波数チャープ信号を含む信号に対応するものとしてステップ9において特定された結合信号、及び該信号の測定された雑音レベルに従って、複数の周波数掃引信号が選択される。より詳細には、識別された結合信号を生成した所定の数の周波数掃引信号が選択される。ここで、選択される周波数掃引信号は、測定された雑音レベルが最も低い周波数掃引信号である。
【0098】
次にプロセスはステップS15に進み、ステップS15において、選択された複数の周波数掃引信号から、出力レーダー波形として送信される掃引パターンが生成される。
【0099】
上記の実施形態では、ステップS11における処理が、所定の数の周波数掃引信号がまだ生成されていないと判断すると、処理はステップS3に戻り、ステップS3において、新たな信号が受信される。したがって、ステップS7において、ステップS5において生成される各周波数掃引信号がそれぞれの受信信号と結合される。すなわち、異なる受信信号が各周波数掃引信号と結合される。
【0100】
代替的な実施形態において、ステップS3において受信された信号が格納され、ステップS11における処理が、所定の数の周波数掃引信号がまだ生成されていないと判断すると、処理はステップS5に戻る。このようにして、次にステップS7において、各周波数掃引信号が同じ格納された受信信号と結合され、結合信号が生成される。
【0101】
したがって、ステップS9において実行される処理は、周波数チャープ信号を含む1つ又は複数の受信信号(すなわち、ステップ3において受信される信号が格納される場合、1つの受信信号であり、周波数掃引信号毎に新たな信号が用いられる場合、2つ以上の信号)に対応する結合信号を特定することが理解されよう。
【0102】
有利には、受信信号と複数の周波数掃引信号との結合は、並行動作として実行することができる。これによって、パッシブモード動作の持続時間が減少する。
【0103】
アクティブモード
パッシブモードの後、適切な制御信号APをTCAユニット206がモードスイッチPAS207に印加することによって、アクティブモードが開始される。
【0104】
アクティブモードにおいて、レーダーは、そのアンテナTAN107を介して、パッシブモードにおいて求められた1つ又は複数の掃引パターンを送信する。
【0105】
アクティブモードにおいて、干渉分類器ICR203は、アイドルのままであり、バッファー/スライサーFRM202に格納されるデータブロックDBに対して「トランスペアレント」である。
【0106】
アクティブモードにおいて用いられる1つ又は複数の掃引パターンは、パッシブモードにおいて被試験環境で良好な性能を有するように構築されているので、自動車FMCWレーダーはマルチユーザー干渉に対して改善した耐性で動作する。
【0107】
最も良好な掃引パターンを選択することによって相互干渉の効果が低減するが、干渉は完全に除去されない場合がある。したがって、自動車FMCWレーダーの測距性能は、バッファー/スライサーFRM202とフーリエシグナルプロセッサFFT205との間にブランキング回路BLR204を組み込むことによってさらに改善される。
【0108】
以下、ブランキング回路BLR204の動作を説明する。
【0109】
まず、データフレームのJ個全てのデータブロックのrms値等の平均レベルが求められる。干渉検出閾値が設けられている。本明細書では、干渉検出閾値は、ブランキング閾値と呼ばれる。たとえば、閾値はデータrms値の4倍に設定することができる。好ましくは、閾値はシステムの雑音レベルの固定値倍(たとえば10倍)を超えるように設定することができる。
【0110】
次に、J個のデータブロックのそれぞれがテストされる。被試験ブロックのrms値がブランキング閾値を超える場合、データブロックはオールゼロブロックと置き換えられる。結果として、ブランキング回路BLR204は、破損したデータブロックが全てオールゼロブロックに置換された変更データフレームZFを、フーリエシグナルプロセッサFFT205に転送する。そのような動作はデータフレーム内で個々のデータブロックが現れる順序を変更しないことに留意すべきである。
【0111】
ブランキング動作によって背景雑音レベルが低減されるので、フーリエシグナルプロセッサFFT205によって用いられる信号検出閾値も低減されるべきである。したがって、ブランキング回路BLR204は、適切に低減された閾値DTをプロセッサFFT205に送信する。変更された閾値DTは、データフレーム内に保有される元のデータブロックの数に比例する。
【0112】
フーリエシグナルプロセッサFFT205は、各周波数掃引パラメーター、すなわちその開始時刻、掃引持続時間TS及び掃引周波数帯域Δfを示す信号SSを受信する。
【0113】
DSPによって実装することができるフーリエシグナルプロセッサ205は、物体の距離R及び/又は速度Vの計算を実行するようになっている。
【0114】
自動車FMCWレーダーは、各モードの動作後にパッシブモードとアクティブモードとの間で交互に切り換わるようにすることもでき、又はパッシブモードが用いられる頻度の方が低くなるようにすることもできる。
【0115】
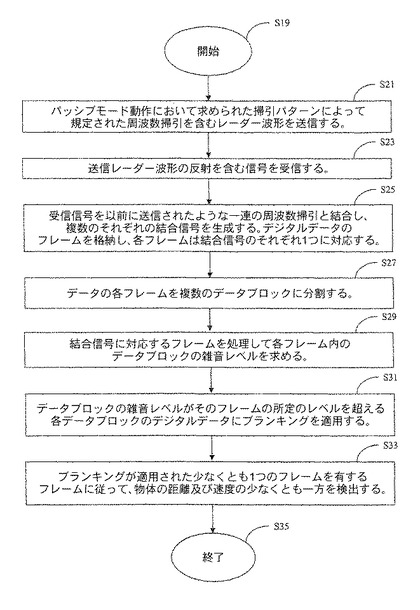
図3b)は、アクティブモードにおいて本実施形態の自動車レーダーシステムによって実行される処理動作を要約するフローチャートである。
【0116】
図3b)を参照すると、ステップS21において、パッシブモード動作において求められた掃引パターンによって規定された周波数掃引を含むレーダー波形が自動車レーダーシステムから送信される。
【0117】
次に、プロセスはステップS23に進み、ステップS23において、送信レーダー波形の反射が受信される。
【0118】
次に、プロセスはステップS25に進み、ステップS25において、受信信号とステップS21において前もって送信されたような一連の掃引とが従来の方法により結合され、複数の結合信号、すなわち周波数掃引ごとに1つの結合信号が生成される。デジタルデータのフレームが格納され、各フレームはそれぞれの結合信号に対応する。
【0119】
次に、プロセスはステップS27に進み、ステップS27において、各フレームは複数のデータブロックに分割され、その後ステップS29に進み、ステップS29において、各フレームは該フレーム内のデータブロックの雑音レベルを求めるために処理される。
【0120】
次に、プロセスはステップS31に進み、ステップS31において、データブロックの雑音レベルがそのフレームについての所定のレベルを超える各データブロックのデジタルデータにブランキングが適用される。
【0121】
次に、プロセスはステップS33に進み、ステップS33において、ブランキングが適用されたフレームを含むフレームに依拠して、物体の距離及び/又は速度が求められる。
【0122】
次に、プロセスはステップS35に進み、ステップS35において、アクティブモードが終了する。
【0123】
処理は、自動的にステップS19に戻って新たなアクティブモード動作を開始するようにすることもでき、又は図3a)のステップS1に戻って新たなパッシブモード動作を開始するようにすることもできる。
【0124】
干渉分類器
次に、上記の図2の実施形態において干渉分類器ICR203として用いることができる様々な干渉分類器を説明する。
【0125】
観測される過渡干渉の持続時間も電力も、そのような干渉のタイプに関する有用な情報を一切提供することができず、したがって異なる原理に基づいて動作する干渉分類器を用いなくてはならないことに留意すべきである。
【0126】
上述した実施形態において用いるのに適した第1のタイプの干渉分類器ICR203は、検査中のサンプルのセットから尖度値を求めることによって周波数チャープ干渉を特定する処理を実行する。
【0127】
尖度は4次中心積率と2次中心積率の二乗との比として規定される。したがって、K個のゼロ平均信号サンプルx1,x2,...,xk,...,xKの場合、
【0128】
【数12】
【0129】
から経験的な尖度ΚXを求めることができる。
【0130】
ランダムガウスプロセスによってモデル化された雑音の場合、尖度は雑音レベルと関係なく3に等しい。一方、任意の振幅のランダムにサンプリングされた正弦波の場合、尖度は1.5に等しい。したがって、第1のタイプの干渉分類器ICR203は、検査中のサンプルのセットから求められた経験的尖度の値を所定の閾値と比較して、該セットが雑音を表す可能性がより高いか、又はそうではなくランダムにサンプルされた正弦波である可能性がより高いかを判定する。
【0131】
次に、本発明者らによって考案され、上記の図2の実施形態において干渉分類器ICR203として用いることができる、改善された第2のタイプの干渉分類器を説明する。
【0132】
最初に、改善された干渉分類器の裏にある基礎を成す理論を提供する。
【0133】
標準的な背景雑音(たとえば熱雑音)及びパルス状高レベル干渉(すなわち過渡干渉)を含む受信信号を考察する。そのような過渡干渉は、広帯域雑音の短いバースト又は周波数変調されたキャリア(チャープ)を有するパルスのいずれかから発生した場合がある。
【0134】
離散時間信号処理を用いるシステムにおいて、雑音バーストによって、ガウス分布を有する一連のサンプルが生じるのに対し、周波数チャープは一定振幅の正弦波のランダムサンプリングにより取得される特徴と同じ特徴を有するサンプルを生成する。
この観測を多くの異なる形で利用して、雑音バーストとチャープとを識別する統計的手順を開発することができる。しかしながら、上述したように、観測される過渡干渉の持続時間も電力も、そのような干渉のタイプに関する有用な情報を一切提供することができない。
【0135】
統計的観点から、雑音バーストBと周波数チャープCとを識別する問題は、2つの代替的仮説(alternative hypotheses)H0及びH1のうちの一方を選択することに等しい。ここで、
H0=雑音バーストBが存在する
H1=チャープCが存在する
である。
【0136】
したがって、K個の信号サンプルx1,x2,...,xk,...,xKは2つの条件付き確率密度関数、すなわち
【0137】
【数13】
【0138】
のうちの一方によって特徴付けられる。
【0139】
仮説H1は、尤度比L(x1,x2,...,xK)が或る所定の判定閾値レベルを超えたときに選択される。
【0140】
尤度比は以下のように規定される。
【0141】
【数14】
【0142】
実際には、対数尤度比ln Lに基づいて等価な手順を利用することがより好都合である。ここで、
【0143】
【数15】
【0144】
であり、ここで、TXは所定の判定閾値である。
【0145】
分類される干渉レベルはアプリオリに知ることができない。
【0146】
しかしながら、この干渉分類器ICR203は、後述するように、信号サンプルを最初に正規化することによって周波数チャープと雑音バーストとを識別するための大幅に改善された実際的手順を提供する。
【0147】
平均絶対偏差を利用する正規化−ロバストな分類器
正規化の1つの形式によれば、利用可能なデータから適切な範囲のデータブロックが選択され、ブロック内のK個の信号サンプルx1,x2,...,xk,...,xKを用いて、以下のように平均絶対偏差を求める。
【0148】
【数16】
【0149】
データブロックの範囲は、最も短い予期される過渡干渉の大部分を捕捉するように選択される。平均絶対偏差MAが所定の判定閾値TNを超えるとき、干渉の存在が宣言される。
【0150】
好ましくは、判定閾値TNは、背景雑音のrms(二乗平均平方根(root-mean-squared))値σNよりも約3倍又は約4倍大きい値にセットされる。
【0151】
雑音バーストBの場合、平均絶対偏差は、
【0152】
【数17】
【0153】
に向かう。ここで、
【0154】
【数18】
【0155】
であり、σBはそれぞれの分散σN2及びσO2を有する背景雑音及びバースト雑音の和のrms値である。
【0156】
振幅Aを有するチャープCが観測され、かつ背景雑音のレベルが低い(たとえばσN<A/5)とき、平均絶対偏差MAはほぼ
【0157】
【数19】
【0158】
に等しい。
【0159】
実際には、双方のパラメーターσE及びAが未知であることに留意する。
【0160】
サンプルの一次シーケンス{xk}は、正規化変換を用いることによって対応する二次シーケンス{yk}に変換される。
【0161】
【数20】
【0162】
上記の変換の目的は、未知のパラメーターσE及びAと無関係に観測値{yk}を作成することである。
【0163】
雑音バーストBの場合、サンプル{yk}は、形態
【0164】
【数21】
【0165】
の確率密度関数を有するガウス非負確率変数の実現値を表す。
【0166】
チャープCが観測される場合、確率密度関数p(y|C)は、背景雑音が無視できるとき、すなわちA≫σNのときにのみ閉形式で表すことができる。そのような場合、
【0167】
【数22】
【0168】
である。
【0169】
他方で、背景雑音が存在する場合、付加雑音の拡散効果を考慮に入れると、p(y|C)は、基礎を成す通常の確率密度関数p0(y)を表すものとみなすことができる。ここで、
【0170】
【数23】
【0171】
である。
【0172】
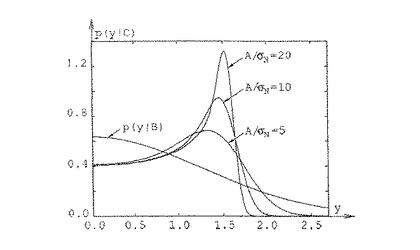
表現p(y|C)の形状と基礎を成す確率密度関数P0(y)の形状との間の差異は、付加雑音のレベルが高くなると増加する。
【0173】
図4は、雑音レベルの選択された値(この場合、比A/σN)についてP0(y)を表す確率密度関数p(y|C)の形状を示している。
各プロットは、108個の複製を利用してモンテカルロコンピューター法から取得されているが、P0(y)の他の表現を用いて雑音レベルに応じて確率密度関数を生成することができることが理解されよう。見て取ることができるように、引数yがゼロに近づくと、確率関数は、式15において予測されるように、値が限界4/π2≒0.4に近づくものと想定する。
【0174】
比較の目的で、図4は雑音バーストBの確率密度関数p(y|B)も示している。
【0175】
対数尤度比は以下のように規定される。
【0176】
【数24】
【0177】
周波数チャープCの存在は、式16において規定されるような対数尤度比が所定の判定閾値を超えるときに宣言される。そうでない場合、処理されているサンプルは雑音バーストBを表すものとして分類される。
【0178】
代替的に、干渉するチャープCの存在は、式17に示すように、K個の非線形に変換されたサンプルy1,y2,...,yk,...,yKの平均GKが適切な判定閾値TCGを超えたときに宣言される。
【0179】
【数25】
【0180】
ここで、非線形変換D(y)は、式16に登場した関数[ln p(yk|C)−lnp(yk|B)]の適切な表現である。
【0181】
以下において、平均絶対偏差に基づく正規化を利用する干渉分類器を、本明細書においてロバストな干渉分類器と呼ぶ。
【0182】
非線形性D(y)は、背景雑音が無視できるとき、すなわちΨ=A/σN→∞のときにのみ、閉形式で表すことができる。そのような場合、
【0183】
【数26】
【0184】
である。
【0185】
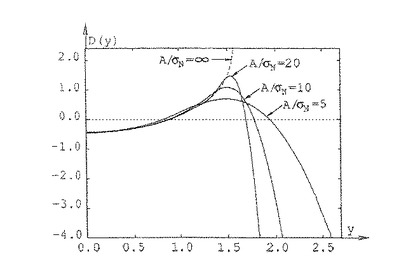
図5は、比A/σNの選択された値について非線形性D(y)の形状を示している。各プロットは、108個の複製を用いてモンテカルロコンピューター法から取得されている。
【0186】
引数yがゼロに近づくと、非線形性D(y)は、上記の式から予測されるように、値が限界ln(2/π)≒−0.45に近づくものと想定する。比較の目的で、図5は、無視できる背景雑音の場合の非線形性D(y)、すなわちA/σN→∞も示している。
【0187】
図5から見てとることができるように、非線形性D(y)の形状は、異なる値のA/σNについて概ね同じであり、D(y)の最大値はA/σNの値が増加するのと共に増加する。全ての場合において、最大値は距離1.4〜1.7のyの値について生じる。
【0188】
本干渉分類器のさらなる特徴によれば、非線形性D(y)は、2つの標準関数、すなわちローレンツ関数及び放物線の重ね合わせによって近似される。
【0189】
比A/σNに関わらず、非線形性D(y)は、D(y)のピークにおいて合体する2つのブランチで構成されるものとみなすことができる。D(y)の左のブランチは、以下の形式の下方シフトされたローレンツ関数の一部によって近似することができる。
【0190】
【数27】
【0191】
右のブランチは、放物線の一部によって表すことができる。
【0192】
【数28】
【0193】
たとえば、A/σN=10のとき、以下のパラメーター値を用いて良好な近似を達成することが可能である。
【0194】
【数29】
【0195】
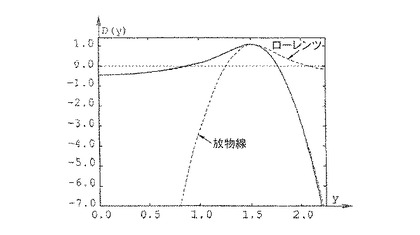
図6は、A/σN=10の場合の非線形性D(y)、並びにまた、ローレンツ関数及び放物線の組み合わせを用いて本干渉分類器203に従って構築された、その非線形性D(y)の近似を示している。
【0196】
非線形性D(y)を多くの異なる形で近似することができることが理解されよう。しかしながら、各近似は何らかの意味で、図5に示す非線形性の一般形状を表現するとともに模倣しようとする。たとえば、左ブランチは直線で近似することができ、右ブランチは異なる直線で近似することができる。
【0197】
したがって、それぞれの場合に、近次関数は、雑音がないときはπ/2の引数値(argument value)、又は雑音があるときは約1.4〜1.7の引数値を含む遷移値においてピーク又は水平域を表す(exhibit)(引数値は雑音の拡散効果に起因してπ/2から逸れ、偏差量は雑音量に依拠する)。遷移値を超えない引数値の場合、近似関数は非減少関数となる。さらに、遷移値以上の引数値の場合、近似関数は減少関数となる。一般に、この下落部分の峻度はピーク(又は水平域)に選考する非減少部分の峻度よりもはるかに大きくなる。
【0198】
標準偏差を利用する正規化−最適分類器
正規化手順における平均絶対偏差の適用は、実際的でかつまた統計的にロバストな手法とみなすことができる。しかしながら、理論的観点から、この目的のために標準偏差を用いることが好ましい場合がある。
【0199】
したがって、さらなる形態の干渉分類器203によれば、観測されるサンプルの一次シーケンス{xk}は、正規化変換を適用することによって対応する二次シーケンス{yk}に変換される。
【0200】
【数30】
【0201】
ここで、SDは
【0202】
【数31】
【0203】
から求められる標準偏差である。
【0204】
雑音バーストBの場合、標準偏差SDは単純にσB、すなわち背景雑音及びバースト雑音の和のrms値に等しい(式11を参照されたい)。振幅Aを有するチャープCが観測され、かつ背景雑音のレベルが低い(たとえばσN<A/5)とき、rmsはほぼ
【0205】
【数32】
【0206】
に等しい。
【0207】
雑音バーストBの場合、サンプル{yk}は確率密度関数
【0208】
【数33】
【0209】
を有するガウス非負確率変数の実現を表す。
【0210】
チャープCが観測されるとき、確率密度関数p(y|C)は、背景雑音が無視できるとき、すなわちA/σN≫1のときにのみ閉形式で表すことができる。そのような場合、
【0211】
【数34】
【0212】
である。
【0213】
他方で、背景雑音が存在する場合、付加雑音の拡散効果を考慮に入れると、p(y|C)は、基礎を成す通常の確率密度関数p0(y)を表すものとみなすことができる。ここで、
【0214】
【数35】
【0215】
である。
【0216】
表現p(y|C)の形状と基礎を成す確率密度関数P0(y)の形状との間の差異は、付加雑音のレベルが高くなると増加する。
【0217】
上述したロバストな分類器の場合のように、モンテカルロコンピューターシミュレーションを用いて、選択された雑音レベル値について表現p(y|C)を生成することができる。代替的に、他の形態の表現を用いることもできる。
【0218】
したがって、干渉するチャープCの存在は、式26に示すように、K個の非線形に変換されたサンプルy1,y2,...,yk,...,yKの平均HKが所定の判定閾値TCHを超えたときに宣言される。
【0219】
【数36】
【0220】
ここで、非線形変換V(y)は、関数[ln p(yk|C)−ln p(yk|B)]の適切な表現である。
【0221】
この場合、非線形性V(y)は、上述した非線形性D(y)が表す形状と異なる形状を有する。
【0222】
以下において、標準偏差に基づく正規化を利用する干渉分類器は、ガウス確率変数に関してその標準偏差がスケールを最良に推定するものであることを反映するために、本明細書において最適干渉分類器と呼ばれる。
【0223】
非線形性V(y)は、背景雑音が無視できるとき、すなわちΨ=A/σN→∞のときにのみ、閉形式で表すことができる。そのような場合、
【0224】
【数37】
【0225】
である。
【0226】
図7は、比A/σNの選択された値について非線形性V(y)の形状を示している。各プロットは、108個の複製を用いてモンテカルロコンピューター法から取得されている。
【0227】
引数yがゼロに近づくと、非線形性V(y)は、式27から予測されるように、値が限界−(lnπ)/2≒−0.57に近づくものと想定する。
【0228】
比較の目的で、図7は無視できる背景雑音、すなわちA/σN→∞の場合の非線形性V(y)も示している。
【0229】
図7を図5と比較することにより見てとることができるように、2つの非線形性D(y)及びV(y)の形状は実質的に同じである。しかしながら、非線形性V(y)の場合、最大値は、雑音がないときは
【0230】
【数38】
【0231】
のyの値、又は雑音があるときは約1.3〜1.6の範囲の値で現れる(引数値は雑音の拡散効果に起因して
【0232】
【数39】
【0233】
から逸れ、偏差量は雑音量に依拠する)のに対し、D(y)の最大値は、雑音がないときはπ/2の値、又は雑音があるときは1.4〜1.7の範囲で現れる。
【0234】
図8は、A/σN=10の場合の2つの非線形性D(y)及びV(y)を示している。双方の非線形性が同様の形状を有するが、非線形性V(y)は、関心引数(arguments of interest)の範囲のより良好な識別を提供するようであるので、D(y)より優れていると思われる。
【0235】
標準偏差に基づく正規化を利用する本干渉分類器のさらなる特徴によれば、非線形関数V(y)の近似が適用される。
【0236】
より詳細には、V(y)の左のブランチは、下方シフトされたローレンツ関数の一部によって近似され、
【0237】
【数40】
【0238】
右のブランチは、放物線の一部によって近似される。
【0239】
【数41】
【0240】
たとえば、A/σN=10のとき、以下のパラメーター値を用いて良好な近似を達成することが可能である。
【0241】
【数42】
【0242】
D(y)と同様に、ローレンツ関数及び放物線とは異なる様々な関数を用いてV(y)を近似することができる。これらについては上述したので、本明細書において再び説明しない。
【0243】
他の正規化方法
図2に示す干渉分類器203における正規化の目的のために、幾何平均、中央値、又はトリム平均等の平均信号レベルの他の基準を用いて信号サンプルを正規化することができる。
【0244】
K個の信号サンプル|x1|,|x2|,...,|xk|,...,|xK|の幾何平均MGは、
【0245】
【数43】
【0246】
によって規定される。
【0247】
正規化の目的のために、中央値又はトリム平均は、
【0248】
【数44】
【0249】
となるように昇順で並べられたK個の信号サンプルから求めることができる。
【0250】
このとき、サンプル中央値は、Kが奇数のとき中央サンプルに等しく、そうではなくKが偶数の場合、サンプル中央値は2つの中央サンプルの算術平均に等しい。
【0251】
トリム平均MLは、L個の最も大きなサンプルを除外し、残りのサンプルの算術平均を求めることによって取得され、したがって、
【0252】
【数45】
【0253】
である。
【0254】
正規化の目的で利用することができる平均信号レベルの他の基準がまだ存在する。
【0255】
正規化を実行するのに用いられる平均信号レベルの基準が何であれ、結果としての非線形性は上述した非線形性D(y)及びV(y)と同じ形式及び特性を有する。このため、各非線形性は、1.3〜1.7のyの値を含む遷移値において最大値を有し、yの値が遷移値を超えない場合に非減少関数によって近似でき、yの値が遷移値以上の場合に減少関数によって近似することができる。全ての場合に、減少関数の平均勾配の大きさは、非減少関数の平均勾配の大きさよりも大きくなる。
【0256】
構成例
上述した有利な干渉分類を実装するための干渉分類器ICR203の構成例を以下で説明する。
【0257】
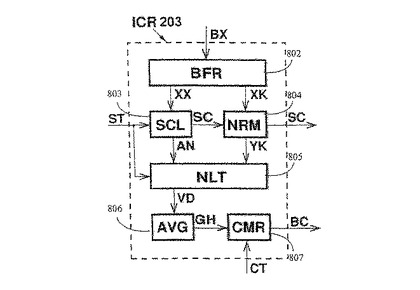
図9は、干渉分類器ICR203の機能ブロック図である。分類器ICR203は以下のブロックを含む。
−データバッファーBFR802、
−正規化器NRM804、
−スケールファクター計算機SCL803、
−非線形変換器NLT805、
−平均化回路AVG806、
−比較器CMR807。
【0258】
動作干渉分類器ICR203を下記で説明する。
【0259】
検査中のデータブロックを形成する複数のK個の信号サンプルx1,x2,...,xk,...,xKが、入力BXを介してデータバッファーBFR802に転送される。
【0260】
出力XXにおいて入手可能なサンプルがスケールファクター計算機SCL803によって用いられ、平均絶対偏差MA又は標準偏差SD等のスケールファクターSCが求められる。選択された正規化のタイプはスケールファクター計算機SCL803の入力STを介して設定される。
【0261】
分類器ICR203は、上述したようにたとえばロバストな分類器又は最適な分類器として動作するように構成することができる。
【0262】
ブロックSCL803によって求められたスケーリングファクターSCは、正規化器NRM804に供給され、二次シーケンスのK個の正規化されたサンプルが計算される。
【0263】
【数46】
【0264】
ここで、正規化されたサンプルy1,y2,...,yk,...,yKはそれぞれ、データバッファーBFR802から入力XKを介して受信された一次信号サンプルx1,x2,...,xk,...,xKに対応する。
【0265】
非線形変換器NLT805は、入力YKにおいて現れる各正規化されたサンプルykを利用して、上記で検討したようなD(yk)及びV(yk)等の対応する値を求める。
【0266】
非線形変換器NLT805は、2つのパラメーター、すなわち非線形性のタイプST(選択された正規化方法に対応する)及び背景雑音のチャープ振幅A及びrms値σNの比の公称値ANを受信する。
【0267】
ANの公称値として、デフォルト値A/σN=10を自動的に選択することができる。代替的に、ANの適切な値を以下のように求めることができる。
【0268】
干渉分類器を組み込むシステムの信頼性のある動作のために、処理される信号のレベルが少なくとも背景雑音のrms値σNよりも少なくともg1倍大きいと仮定する。
そのような最小レベル(g1・σN)を有する信号は、正弦干渉の最も小さな振幅Aがこの最小レベルよりg2倍大きいとき、破損する形で変形し、したがってA=g2・(g1・σN)及び
【0269】
【数47】
【0270】
であることも想定する。たとえば、g1=5及びg2=2であるとき、AN=A/σ=10である。
【0271】
さらに、図5及び図7から見てとることができるように、それぞれの非線形性D(y)及びV(y)の形状は、A/σNがたとえば10から20に増加するときに大きく変化しない。また、より大きな値の振幅Aを有する正弦干渉は、常により高い信頼性で検出することができる。したがって、分類器によって用いられるANの公称値は、好ましくは比A/σNのより低い動作値に対応するように選択される。
【0272】
平均化回路AVG806は、入力VDにおいて受信される非線形に変換された正規化サンプルの平均GHを求める。
【0273】
計算された平均GHは、比較器CMR807において判定閾値CTと比較される。平均GHが判定閾値CTを超えると、干渉チャープの存在が宣言される。そうでない場合、処理されるサンプルは雑音の干渉バーストを表すものとして分類される。
【0274】
干渉、雑音バーストB、又は周波数チャープCの分類に関する判定は、比較器CMR807の出力BCにおいて提供される。さらに、出力SCは、分類される干渉レベルを示すスケールファクターを提供する。
【0275】
広範なモンテカルロシミュレーション法によって、上述した第2のタイプの干渉分類器が上述した第1のタイプの尖度ベースの分類器の性能を凌ぐことができることがわかっている。
【0276】
たとえば、データブロックあたりK=16個のサンプル、及びPFA=0.01において固定された誤警報確率(false-alarm probability)の場合、分類器毎の判定閾値CT及び検出確率PDが以下に与えられる。
【0277】
【表1】
【0278】
上記の文脈において、検出確率PDは、実際にチャープCが存在するときに「チャープCが存在する」と判定する確率であり、誤警報確率PFAは、実際に雑音バーストBが存在するときに「チャープCが存在する」と判定する確率である。
【0279】
上記で与えられた各値は、106個の複製を利用するモンテカルロコンピューター法から取得された。見てとれるように、第2のタイプの干渉分類器のロバストなバージョン及び最適なバージョンは、それぞれ尖度ベースの分類器に対して、検出確率PDにおいて5%及び7%の改善を提供する。
【0280】
例示的な実施例
本発明の実施形態による自動車レーダーの利点の理解を容易にするために、以下で実施例を説明する。
【0281】
異なる周波数の正弦波及び単位rms値の背景雑音を含むビート信号を検討する。各正弦波の振幅は0.27に等しく、そのようなケースは、たとえば、自動車レーダーの視野(field-of-view)(FOV)に現れる3つの非常に小さな物体を表すことができる。
【0282】
図10のa)は、ビート信号を表す512個のサンプルを含むデータフレームを示している。正弦波は雑音にかなり埋もれているが、対応する周波数成分は図10のb)に示す周波数領域表現において明確に見ることができる。
【0283】
図11のa)は、同じデータフレームであるが、それぞれが同じ振幅25を有する3つの高レベル周波数チャープによってさらに破損されたデータフレームを示している。比較のために、ブランキング閾値レベルBTHも示されている。このケースでは、図11のb)に示す周波数領域表現が、干渉チャープの複数の周波数成分によって支配され、関心周波数成分は検出可能でない。
【0284】
高レベル周波数チャープを除去したブランキング動作によって変更されたデータフレームを示す図12のa)、及びデータフレームの周波数領域表現を示す図12のb)に示されるように、ブランキング手順を適用する試みはこのケースでは失敗する。
【0285】
図13のa)は、自動車レーダーによって送信された周波数掃引が周波数において適切にシフトされ(すなわち、異なる掃引パターンが用いられ)、3つの干渉チャープのうちの1つが回避されたときの対応するデータフレームを示している。しかしながら、図13のb)に示す周波数領域表現において、関心周波数成分は依然として検出するのが困難である。
【0286】
検出を改善するために、図13のa)に示すデータフレームに適切なブランキング閾値レベルBTHを用いてブランキングが適用され、それによって図14a)に示すようになる。変更されたデータフレームが図14のa)に示され、干渉チャープによって破損された元もブロックに置き換えられた2つのオールゼロデータブロックを含む。
【0287】
図14のb)に示す変更されたデータフレームの周波数領域表現によって、全て検出閾値を超えた所望の3つの周波数成分の存在がはっきりと明らかになる。
【0288】
上記の実施例において、ブランキングのみではマルチユーザー干渉の効果を抑制するのに十分でなかった。しかしながら、信号ブランキングと併せて送信周波数掃引の適応的な選択を用いることによって、信頼性のある検出が達成された。
【0289】
しかしながら、代替的なシナリオにおいて、信号ブランキングをさらに必要とすることなく、送信周波数掃引の適応的な選択のみで、信頼性のある検出を達成するのに十分である場合がある。
【0290】
変更及び変形
上述した実施形態に対し、多くの変更及び変形を行うことができる。
【0291】
たとえば、図2に示す実施形態は、ハードウェアコンポーネントを備える。しかしながら、一実施形態は、ソフトウェア、ファームウェア、又はソフトウェア、ファームウェア、及びハードウェアの任意の組み合わせを用いて実施することができる。
たとえば、図15は、干渉分類器ICR203、ブランキング回路BLR204、フーリエシグナルプロセッサFFT205、タイミング/制御/算術ユニットTCA206、及び波形発生器WFG110が全て、コンピュータープログラム命令によってプログラムされたプログラム可能な処理装置1503によって実装されて上述した処理動作を実行する一実施形態を示している。
コンピュータープログラム命令は、たとえばストレージ媒体1501等のコンピュータープログラム製品又は信号1502に対し与えられる。
【0292】
本発明の実施形態の上記の説明は、説明及び記述の目的で提示された。上記の説明は、網羅的であることも、本発明を開示された形式に限定することも意図していない。上記の説明を鑑みて、多くの代替形態、変更形態、及び変形形態によって、当業者が本発明を検討される特定の使用に適した様々な実施形態において利用することが可能になることは明らかである。
【技術分野】
【0001】
本発明は、干渉の効果を検出及び抑制する際に用いるための自動車レーダーシステム及び方法に関する。開示されるシステム及び方法は、同じ領域において動作すると共に同じ周波数帯域を共有する他の周波数変調連続波システム(frequency modulated continuous-wave)(FMCW)によって生じる干渉へのFMCW自動車レーダーの耐性を改善するのに特に適用可能である。
【0002】
[優先権の主張]
本出願は、2010年5月27日に出願された欧州特許出願第10164048.0号の優先権を主張するものであり、該特許文献は相互参照によりその全体が本明細書に援用される。
【背景技術】
【0003】
図1は、従来の周波数変調連続波(frequency modulated continuous-wave)(FMCW)自動車レーダーの簡略化された機能ブロック図である。
【0004】
システムは、受信アンテナRAN102と、信号調整ユニットSCU103と、ダウンコンバーターDCR104と、アナログ/デジタルコンバーターADC105と、デジタルシグナルプロセッサDSP106と、タイミング/制御ユニットTCU111と、波形発生器WFG110と、アップコンバーターとしても機能する電圧制御発振器VCO109と、電力増幅器/駆動装置PAR108と、送信アンテナTAN107とを備える。
【0005】
波形発生器WFG110は、制御信号CVを供給して、電圧制御発振器VCO109に周波数上方掃引及び下方掃引を生じさせる。結果としての各波形SWは電力増幅器/駆動装置PAR108において増幅され、プロービング波形TWが生じる。アンテナTAN107によって送信される波形TWは一定の振幅を有するが、その周波数は、各上方掃引又は下方掃引時間間隔Ts中に帯域Δfを掃引する。
【0006】
距離Rにおける障害物OBS101からのエコーRWは、時間において(2R/c)だけ遅延された送信波形TWの減衰されたコピーである。ここでcは光速である。
【0007】
エコーRWは、信号調整ユニットSCU103において適切に処理され、反射信号の表現ARが生成される。信号ARは、ダウンコンバーターDCR104において、電圧制御発振器VCO109によって供給された送信波形TWのコピーSWと結合される。ダウンコンバーターDCR104の出力信号BSはまず、アナログ/デジタルコンバーターADC105においてデジタル形式DSに変換され、次にデジタルシグナルプロセッサDSP106に送信される。
【0008】
デジタルシグナルプロセッサDSP106は、タイミング/制御ユニットTCU111から、各周波数掃引のパラメーター、すなわち該周波数掃引の開始時刻、掃引持続時間TS、及び掃引周波数帯域Δfを示す信号SSを受信する。信号SSは、波形発生器WFG110によって、要求される制御信号CVを生成するのにも用いられる。
【0009】
デジタルシグナルプロセッサDSP106は、ダウンコンバーターDCR104から受信したビート信号BSを解析することによって、障害物OBS101の距離R及び速度Vを求める。ビート信号BSは、送信波形TWの対応する線形周波数掃引SWに応じて取得される。ビート周波数は反射波RWの周波数から送信波TWの周波数を減算したものとして規定される。
【0010】
静止した障害物OBS101の場合、ビート周波数の大きさ|fR|は障害物距離Rに直接比例する。
【0011】
【数1】
【0012】
ここで、|SF|=|Δf|/TSは周波数掃引の勾配である。ビート周波数fRは周波数下方掃引(SF<0)の場合に正であり、周波数上方掃引s(SF>0)の場合に負である。正のビート周波数と負のビート周波数との識別は、直交信号ダウンコンバージョンを用いることによって達成することができる。
【0013】
レーダーと障害物OBS101との間の半径方向速度Vを有する相対運動は、ドップラー周波数シフト
【0014】
【数2】
【0015】
を付加することによって「距離によって生成された(range-generated)」ビート周波数fRを変更する。ここで、λは送信波形TWの波長である。実際に、ドップラーシフトfVの値は、掃引された周波数の量による影響を受けない。
【0016】
障害物OBS101が速度Vでレーダーに接近している場合、ドップラーシフトfVの値は正になるのに対し、障害物OBS101がレーダーから遠ざかっている場合、ドップラーシフトfVの値は負となる。その結果、観測されるビート周波数fBは2つの周波数成分fR及びfVを結合したものから生じ、したがって、
【0017】
【数3】
【0018】
である。
【0019】
勾配SF自体は負となることもできるし(下方掃引の場合)、正となることもできる(上方掃引の場合)ことに留意する。
【0020】
単一の動いている障害物OBS101の場合、障害物の距離R及び相対速度Vの双方を一意に求めるために、実質的に異なる勾配SFを有する少なくとも2つの周波数掃引が必要とされる。しかしながら、レーダーの視野(FOV)内に2つ以上の障害物が存在する場合、各障害物の距離及び速度を正しく求めるために、別個の勾配を有する、より多くの周波数掃引が必要となる。
【0021】
上記の検討から、障害物の距離及び速度に関する情報は、複数のビート信号の周波数成分内に含まれることになり、そのような各ビート信号は、レーダーによって送信された対応する周波数掃引に応じて取得される。
【0022】
したがって、デジタルシグナルプロセッサDSPによって実行される信頼性のある周波数推定が最も重要である。
【0023】
非特許文献1において提示される分析は、自動車レーダーにおいて一般に使用される掃引パターン及び関連する信号処理技法が全てマルチユーザー干渉の影響を受けることを示した。
【0024】
したがって、マルチユーザー環境内で動作する既知の自動車FMCWレーダーシステムは、マルチユーザー干渉によって生じる問題に起因して、信頼性のない障害物検出、並びに距離及び速度の不良な推定を提供している。
【先行技術文献】
【非特許文献】
【0025】
【非特許文献1】G. M. Brooker「Mutual Interference of Millimeter-Wave Radar Systems」(IEEE Trans. Electromagn. Compat., pp. 170-181, Feb. 2007)
【発明の概要】
【発明が解決しようとする課題】
【0026】
本発明者らは、人工的な干渉を自然発生的な干渉から区別し、そして人工的な干渉を回避及び/又は抑制する手段を講じることによって、自動車FMCWレーダーシステムにおける距離及び速度の推定を劇的に改善することができるということに気がついた。
【課題を解決するための手段】
【0027】
したがって、概して、本発明は、受信信号を処理して、周波数チャープを含む干渉(すなわち人工的な雑音)を識別するように動作可能であると共に、識別された周波数が干渉することになる周波数における送信を少なくとも部分的に回避するように、出力レーダー波形の送信に用いられる周波数掃引信号を設定するようにさらに動作可能な自動車レーダーシステムを提供する。
【0028】
より詳細には、人工的な信号の他のソースを有する環境において、出力レーダー波形として送信される掃引パターンを求めるように動作可能な自動車レーダーシステムであって、
背景雑音、又は背景雑音と1つ若しくは複数の他のソースからの干渉信号との組み合わせを含む雑音信号を受信するように動作可能な受信機と、
複数の異なる周波数掃引信号を生成するように動作可能な信号発生器と、
各周波数掃引信号を受信雑音信号と共に処理して、該周波数掃引信号毎に処理された信号を生成するように動作可能なシグナルプロセッサと、
別のソースからの干渉信号を含む1つ又は複数の受信雑音信号に対応する処理された信号を検出すると共に、該別のソースからの干渉信号を含む1つ又は複数の前記受信雑音信号に対応する特定され処理された信号のそれぞれの雑音レベルを求めるように動作可能な干渉分類器と、
前記干渉分類器によって求められた前記雑音レベルに従って複数の前記周波数掃引信号を選択するように動作可能なセレクターと、
前記選択された複数の周波数掃引信号に基づいて送信される出力レーダー波形のための掃引パターンを求めるように動作可能な制御ユニットと、
を備える、システムが提供される。
【0029】
好ましくは、前記自動車レーダーシステムは、
パッシブモードとアクティブモードとの間で前記自動車レーダーシステムの前記動作を変更する手段をさらに備え、
前記パッシブモードにおいて、前記自動車レーダーシステムは、1つ又は複数の受信雑音信号から出力波形のための掃引パターンを求めるようになっており、
前記アクティブモードにおいて、前記自動車レーダーシステムは、パッシブ動作モードにおいて求められた前記掃引パターンを含む出力波形信号を送信すると共に、該送信された出力波形の反射を含む受信信号を処理するようになっている。
【0030】
好ましくは、前記自動車レーダーシステムは、
データのフレームを格納するように構成される格納手段であって、各フレームはそれぞれの周波数掃引信号のための処理された信号に対応する、格納手段と、
フレームの前記データに信号ブランキングを適用するように動作可能なブランキング回路と、
をさらに備え、
前記アクティブモードにおいて、前記ブランキング回路は前記周波数掃引信号のための処理された信号に対応するフレームを処理し、該フレームを所定のサイズのデータブロックにスライスして、該フレーム内の該データブロックのレベルを求めると共に、該データブロックの該レベルが所定のレベルを超えている場合、該データブロックにブランキングを適用するように動作可能であり、
前記自動車レーダーシステムは、前記ブランキングが適用された1つ又は複数のフレームに依拠して物体の距離及び速度のうちの少なくとも一方を検出するようになっている。
【0031】
好ましくは、前記干渉分類器は前記周波数掃引信号毎に処理された信号のサンプルを処理するように動作可能であり、
該干渉分類器は、
前記信号サンプルを用いて前記処理された信号のためのスケールファクターを計算するように動作可能なスケールファクター計算機と、
前記スケールファクターを用いて前記信号サンプルを正規化することによって、正規化信号サンプルyを計算するように動作可能な正規化器と、
前記正規化信号サンプルに対し非線形変換T(y)を実行して、変換された信号サンプルを計算するように動作可能な非線形変換器と、
前記変換された信号サンプルの平均を計算するように動作可能な平均化回路と、
前記変換された信号サンプルの前記計算された平均を所定の閾値レベルと比較して、前記処理された信号内に存在する前記雑音のタイプがマルチユーザー環境からの干渉信号を含むか否かを判断する(すなわち、存在する雑音のタイプが周波数チャープ信号であるか否かを判断する)ように動作可能な比較器と、
を備え、
前記非線形変換器は、第1の関数T1(y)及び第2の関数T2(y)の組み合わせを含む非線形変換T(y)を実行するように動作可能であり、前記第1の関数は遷移値ytを超えない値を有する正規化信号サンプルに適用される変換を規定し、前記第2の関数は、遷移値yt以上の値を有する正規化信号サンプルに適用される変換を規定し、
T1(y)は正規化信号サンプル値の増加に対する非減少関数であり、
T2(y)は正規化信号サンプル値の増加に対する減少関数であり、
遷移値は1.3≦yt≦1.7の範囲の値を有する。
【0032】
好ましくは、前記第1の関数T1(y)は正規化信号サンプル値の増加に対する増加関数であり、T1(y)の平均勾配の大きさはT2(y)の平均勾配の大きさよりも小さい。
【0033】
好ましくは、前記干渉分類器の前記スケールファクター計算機は、前記信号サンプルの平均絶対偏差(mean absolute deviation)であるスケールファクターを計算するように動作可能であり、前記非線形変換器は、条件付き確率p(y|N1)及びp(y|N2)の比を共同で近似する第1の関数T1(y)及び第2の関数T2(y)の組み合わせを含む非線形変換T(y)を実行するように動作可能であり、ここで
【0034】
【数4】
【0035】
であり、
p(y|N2)は雑音レベルに依存する関数
【0036】
【数5】
【0037】
の表現であり、
N1はバースト雑音であり、N2は周波数チャープ信号を含む干渉である。
【0038】
好ましくは、前記干渉分類器の前記スケールファクター計算機は、前記信号サンプルの標準偏差であるスケールファクターを計算するように動作可能であり、前記非線形変換器は、条件付き確率p(y|N1)及びp(y|N2)の比を共同で近似する第1の関数T1(y)及び第2の関数T2(y)の組み合わせを含む非線形変換T(y)を実行するように動作可能であり、ここで
【0039】
【数6】
【0040】
であり、
【0041】
p(y|N2)は雑音レベルに依存する関数
【0042】
【数7】
【0043】
の表現であり、
N1はバースト雑音であり、N2は周波数チャープ信号を含む干渉である。
【0044】
好ましくは、前記干渉分類器の前記スケールファクター計算機は、前記スケールファクターとして、前記信号サンプルの平均絶対偏差、標準偏差、幾何平均、中央値、及びトリム平均のうちの1つを計算するように動作可能である。
【0045】
好ましくは、前記干渉分類器の前記正規化器は、各信号サンプルの大きさを求めるように動作可能であると共に、該正規化信号サンプルの大きさを前記スケールファクターで除算することによって、前記正規化信号サンプルyを計算するように動作可能である。
【0046】
好ましくは、前記干渉分類器の前記非線形変換器は非線形変換を実行するように動作可能であり、該非線形変換において、前記第1の関数T1(y)はローレンツ関数を含み、前記第2の関数T2(y)は放物線を含む。
【0047】
好ましくは、前記スケールファクター計算機及び前記非線形変換器は、複数の異なるタイプのスケールファクターを計算し、複数の異なる非線形変換を適用するようにそれぞれ動作可能であり、前記スケールファクター計算器及び前記非線形変換器は、被試験受信信号に適用される正規化のタイプを規定する入力制御信号に依拠して、異なるタイプのスケールファクター及び異なる非線形変換間で選択するように構成される。
【0048】
好ましくは、前記処理された信号を検出するプロセスは、分類された雑音のレベルを示す信号を出力するプロセスを含む。
【0049】
本発明は、複数の干渉源からなる環境において自動車レーダーによって出力レーダー波形として出力される掃引パターンを求める方法であって、
背景雑音、又は背景雑音と前記環境内の1つ若しくは複数の他のソースからの干渉信号との組み合わせを含む1つ又は複数の雑音信号を受信するプロセスと、
複数の異なる周波数掃引信号を生成するプロセスと、
各周波数掃引信号を受信雑音信号と共に処理して、該周波数掃引信号毎に処理された信号を生成するプロセスと、
別のソースからの干渉信号を含む1つ又は複数の受信雑音信号に対応する処理された信号を検出すると共に、該別のソースからの干渉信号を含む前記受信雑音信号に対応する各前記検出された処理された信号のそれぞれの雑音レベルを求めるプロセスと、
前記別のソースからの干渉信号を含む前記1つ又は複数の前記受信雑音信号に対応する前記処理された信号の前記求められた雑音レベルに従って、複数の前記周波数掃引信号を選択するプロセスと、
前記選択された複数の周波数掃引信号に依拠して送信される出力レーダー波形のための掃引パターンを求めるプロセスと、
を含む、方法も提供する。
【0050】
好ましくは、本方法は、パッシブモードとアクティブモードとの間で切り換えるプロセスをさらに含み、
前記パッシブモードにおいて、1つ又は複数の受信雑音信号から出力波形のための掃引パターンが求められ、
前記アクティブモードにおいて、先行するパッシブモード動作において求められた前記周波数掃引パターンを含む出力波形が送信され、該送信された出力波形の反射を含む受信信号が処理される。
【0051】
好ましくは、前記アクティブモードは、
データのフレームを格納するプロセスであって、各フレームはそれぞれの周波数掃引信号のための処理された信号に対応する、格納するプロセスと、
周波数掃引信号のための処理された信号に対応するフレームを処理するプロセスであって、前記フレームをデータブロックにスライスして、該フレーム内の該データブロックのレベルを求めると共に、該データブロックの該レベルが所定のレベルを超えている場合、該データブロックのデータにブランキングを適用する、処理するプロセスと、
前記ブランキングが適用された少なくとも1つのフレームに依拠して物体の距離及び速度のうちの少なくとも一方を検出するプロセスと、
を含む。
【0052】
好ましくは、前記マルチユーザー環境からの前記干渉信号を含む前記受信雑音信号に対応する処理された信号を検出する分類プロセスは、
前記処理された信号の信号サンプルを用いることであって、該処理された信号のためのスケールファクターを計算する、用いること、
前記スケールファクターを用いて前記受信信号サンプルを正規化することによって、正規化信号サンプルyを計算すること、
前記正規化信号サンプルyに対し非線形変換T(y)を実行することであって、変換された信号サンプルを計算する、実行すること、
前記変換された信号サンプルの平均を計算すること、及び
前記変換された信号サンプルの前記計算された平均を所定の閾値レベルと比較することであって、前記処理された信号内に存在する前記雑音のタイプが、前記マルチユーザー環境からの前記干渉信号を含むか否かを判断する(すなわち、存在する雑音のタイプが周波数チャープ信号であるか否かを判断する)、比較すること、
を含み、
前記非線形変換T(y)は、第1の関数T1(y)及び第2の関数T2(y)の組み合わせを含み、前記第1の関数は遷移値ytを超えない値を有する正規化信号サンプルに適用される変換を規定し、前記第2の関数は、遷移値yt以上の値を有する正規化信号サンプルに適用される変換を規定し、
T1(y)は正規化信号サンプル値の増加に対する非減少関数であり、
T2(y)は正規化信号サンプル値の増加に対する減少関数であり、
遷移値ytは1.3≦yt≦1.7の範囲の値を有する。
【0053】
好ましくは、前記分類プロセスにおいて、前記第1の関数T1(y)は正規化信号サンプル値の増加に対する増加関数であり、T1(y)の平均勾配の大きさはT2(y)の平均勾配の大きさよりも小さい。
【0054】
好ましくは、前記分類プロセスにおいて、前記スケールファクターは前記信号サンプルの平均絶対偏差であり、前記非線形変換T(y)は、条件付き確率p(y|N1)及びp(y|N2)の比を共同で近似する第1の関数T1(y)及び第2の関数T2(y)の組み合わせを含み、ここで
【0055】
【数8】
【0056】
であり、
p(y|N2)は雑音レベルに依存する関数
【0057】
【数9】
【0058】
の表現であり、
N1はバースト雑音であり、N2は周波数チャープ信号を含む干渉である。
【0059】
好ましくは、前記分類プロセスにおいて、前記スケールファクターは前記信号サンプルの標準偏差であり、前記非線形変換T(y)は、条件付き確率p(y|N1)及びp(y|N2)の比を共同で近似する第1の関数T1(y)及び第2の関数T2(y)の組み合わせを含み、ここで
【0060】
【数10】
【0061】
であり、
【0062】
p(y|N2)は雑音レベルに依存する関数
【0063】
【数11】
【0064】
の表現であり、
N1はバースト雑音であり、N2は周波数チャープ信号を含む干渉である。
【0065】
好ましくは、前記信号サンプルを用いてスケールファクターを計算するプロセスは、前記スケールファクターとして、前記信号サンプルの平均絶対偏差、標準偏差、幾何平均、中央値、及びトリム平均のうちの1つを計算することを含む。
【0066】
好ましくは、前記正規化信号サンプルを計算するプロセスは、各信号サンプルの大きさを求めると共に、該信号サンプルの大きさを前記スケールファクターで除算することによって、前記正規化信号サンプルを計算することを含む。
【0067】
好ましくは、前記非線形変換を実行するプロセスにおいて、該非線形変換の前記第1の関数T1(y)はローレンツ関数を含み、該非線形変換の前記第2の関数T2(y)は放物線を含む。
【0068】
本発明は、プログラム可能な処理装置をプログラムして、上述した方法を実行するように動作可能になるようにするコンピュータープログラム命令を担持する、ストレージ媒体、ストレージデバイス、又は信号等のコンピュータープログラム製品も提供する。
【図面の簡単な説明】
【0069】
【図1】従来のFMCW自動車レーダーの単純化された機能ブロック図である。
【図2】本発明の一実施形態による干渉分類器を組み込むFMCW自動車レーダーシステムの機能ブロック図である。
【図3a)】本発明の一実施形態による、パッシブモードで実行される、送信用の複数の周波数掃引信号を求める方法を示すフローチャートである。
【図3b)】本発明の一実施形態による、アクティブモードで実行される、受信信号を送信及び処理する方法を示すフローチャートである。
【図4】雑音によって破損された正弦波の振幅の確率密度関数p(y|C)及び雑音の大きさの確率密度関数p(y|B)の形状を示す図である。
【図5】本発明の一実施形態による、自動車レーダーシステムにおける使用のための干渉分類器のロバストなバージョンにおいて利用される非線形性D(y)の形状を示す図である。
【図6】本発明の一実施形態による、自動車レーダーシステムおける使用のための干渉分類器のロバストなバージョンにおいて利用される非線形性D(y)及びまたその近似を示す図である。
【図7】本発明の一実施形態による、自動車レーダーシステムおける使用のための干渉分類器の最適なバージョンにおいて利用される非線形性V(y)の形状を示す図である。
【図8】本発明の一実施形態による、自動車レーダーシステムおける使用のための干渉分類器のロバストなバージョンにおいて利用される非線形性D(y)を、最適なバージョンにおいて利用される非線形性V(y)と共に示す図である。
【図9】本発明の一実施形態による、自動車レーダーシステムにおける使用のための干渉分類器の機能ブロック図である。
【図10】a)は、背景雑音によって損なわれた3つの正弦波を含むデータフレームを示す図であり、b)は、a)のデータフレームの周波数領域表現を示す図である。
【図11】a)は、背景雑音及びさらに3つの高レベル周波数チャープによって損なわれた3つの正弦波を含むデータフレームを示す図であり、b)は、a)のデータフレームの周波数領域表現を示す図である。
【図12】a)は、背景雑音及びさらに3つの高レベル周波数チャープによって損なわれた3つの正弦波を含む、(ブランキングによって)変更されたデータフレームを示す図であり、b)は、a)のデータフレームの周波数領域表現を示す図である。
【図13】a)は、背景雑音及びさらに2つの高レベル周波数チャープによって損なわれた3つの正弦波を含むデータフレームを示す図であり、b)は、a)のデータフレームの周波数領域表現を示す図である。
【図14】a)は、背景雑音及びさらに2つの高レベル周波数チャープによって損なわれた3つの正弦波を含む、(ブランキングによって)変更されたデータフレームを表す図であり、b)は、a)のデータフレームの周波数領域表現を示す図である。
【図15】コンピュータープログラム命令を用いて実施されるFMCW自動車レーダーシステムの一実施形態を示す図である。
【発明を実施するための形態】
【0070】
後述するように、本発明の実施形態は、一般に、多くの人工的な送信が位相又は周波数を変調されたパルス正弦波キャリアの形態を有するという、本発明者らの認識を利用する。
非同期サンプリングから取得されたそのような信号の離散時間サンプルは、ランダムな位相を有するサンプリングされた正弦波の統計的特性と同じ統計的特性を有する。一方、一般に、自然現象から生じる信号は、ランダムガウス過程によって表すことができる。これを利用して、観測される信号が、ガウスランダム過程を表すのか、又は周波数チャープ等の様々な位相を有する雑音のある正弦波を表すのかを判定する干渉分類器を有する自動車システムを提供する。
自動車システム自体からの送信とは異なる人工的な送信によって生じる周波数チャープが検出される場合、自動車レーダーシステムは、検出された周波数チャープからの干渉を回避するか又は少なくとも部分的に回避する出力レーダー波形を生成するための周波数掃引信号を選択する。さらに、検出された周波数チャープを用いて、該検出された周波数チャープの干渉効果を抑制するためのパルスブランキング動作を誘導する。
【0071】
図2は、本発明の一実施形態によるFMCW自動車レーダーシステムの簡略化された機能ブロック図である。
【0072】
自動車レーダーシステムは以下のブロックを含む。
−受信アンテナRAN102、
−信号調整ユニットSCU103、
−ダウンコンバーターDCR104、
−アナログ/デジタルコンバーターADC201、
−フーリエシグナルプロセッサFFT205、
−タイミング/制御/算術ユニットTCA206、
−波形発生器WFG110、
−電圧制御発振器VCO109、
−電力増幅器/駆動装置PAR108、
−送信アンテナTAN107、
−モードスイッチPAS207、
−バッファー/スライサーFRM202、
−干渉分類器ICR203、
−ブランキング回路BLR204。
【0073】
FMCW自動車レーダーは、2つのモード、すなわちパッシブ及びアクティブで交互に動作するようになっている。
【0074】
パッシブモードの目的は、マルチユーザー干渉によって過剰に破損されることのない周波掃引パターンを動的かつ適応的に選択することである。
【0075】
アクティブモードにおいて、自動車レーダーは、図1に示されるような既知のシステムの通常動作を実行することができる。しかしながら、アクティブモードでは、物体の距離及び/又は速度を求めるのを改善するために、受信信号内のデータにブランキングも適用される。
【0076】
パッシブモード
レーダーシステムは、電圧制御発振器VCO109と電力増幅器/駆動装置PAR108との間の信号経路をモードスイッチPAS207がブロッキングしている限り、パッシブオペレーティングモード、すなわち「リスンのみ」オペレーティングモードにとどまる。
【0077】
パッシブモードにおいて、レーダーアンテナTAN102は、周波数掃引を一切送信しない。しかしながら、そのような掃引SWは、依然としてVCO109によって生成され、ダウンコンバーターDCR104に適用される。
【0078】
モードスイッチPAS207は、タイミング/制御/算術ユニットTCA206によって提供される信号APによって制御される。
【0079】
パッシブオペレーティングモード中、フーリエシグナルプロセッサFFT205及びブランキング回路BLR204の双方は、アイドルのままである。
【0080】
TCAユニット206は、適切な信号SSを波形発生器WFG110に適用することによって異なる周波数掃引SWを順次選択し、波形発生器WFG110はそれに応じて、対応する制御信号CVを生成する。
結果として、電圧制御発振器VCO109は一連の別個の周波数掃引SWを生成し、各掃引はその
−開始周波数、
−終了周波数、
−掃引持続時間、
によって特徴付けられる。
【0081】
後述するランク付けの目的で、各異なる周波数掃引SWは掃引インデックスn∈{1,...,N}によって特定される。
【0082】
レーダーは、該レーダーの受信アンテナRAN102によって捕捉された信号を処理することによってマルチユーザー「密信号(dense-signal)」環境を検知する。
受信信号RWは、同じ領域において動作している他の自動車レーダーによって送信された信号及び背景雑音を含む。受信信号RWの表現ARは、電圧制御発振器VCO109によって供給されたN周波数掃引SWと共にダウンコンバーターDCR104において一緒に処理される。
【0083】
ダウンコンバーターDCR104の出力信号BSは、アナログ/デジタルコンバーターADC201においてデジタル形式に変換された後、バッファー/スライサーFRM202内に格納される。バッファー/スライサーFRM202内に格納される各データフレームは、ダウンコンバーターDCR104に適用されるN個の異なる周波数掃引SWのうちの1つに一意に対応する。
【0084】
各データフレームは、TCAユニット206によって供給された制御信号FWに応じて、複数のJ個のデータブロックDBに「スライス」される。結果としてのデータブロックDBは次に、TCAユニット206によって提供される信号JJに応じて、干渉分類器ICR203に順次適用される。
【0085】
分類器ICR203は、チャープ干渉を含むデータブロックを特定し、そのような干渉のレベルを示す信号SCをTCAユニット206に送信する。
【0086】
結果として、TCAユニット206は、データフレーム内の破損したデータブロックの数、及びまたマルチユーザー干渉の総破損エネルギーを求めることができる。この情報は、TCAユニットによって、マルチユーザー干渉に対するその耐性に従って、N個の周波数掃引SWをランク付けするのに用いられる。
【0087】
したがって、パッシブオペレーティングモード中、N個全ての利用可能な周波数掃引SWがマルチユーザーチャープ干渉への耐性の観点から評価される。次に、TCAユニット206は、被試験マルチユーザー環境において良好な測距性能を提供する1つ又は複数の掃引パターンを構築するのに最も良好なM個の掃引を選択する。
【0088】
掃引パターンにおいて用いられるM個の掃引が選択されると、掃引パターンは多くの形で構築することができる。たとえば掃引のランダム順列又は擬似ランダム順列を利用することができる。
【0089】
図3a)は本実施形態の自動車レーダーシステムによって掃引パターンを求めるために実行される処理動作を要約するフローチャートである。
【0090】
図3a)を参照すると、ステップS3において、マルチユーザー環境における他のソースからのバースト雑音及び/又は周波数チャープ信号を含む、1つ又は複数の信号が受信される。
【0091】
次に、プロセスはステップS5に進み、ステップS5において、周波数掃引信号が生成される。周波数掃引信号は、現在のパッシブモード動作のために生成されたいかなる他の周波数掃引信号とも異なる。
【0092】
次にプロセスはステップS7に進み、ステップS7において、周波数掃引信号が受信信号と結合され、周波数掃引信号のための結合信号が生成される。
【0093】
次にプロセスはステップS9に進み、ステップS9において、結合信号内の雑音のタイプが求められる。結合信号が周波数チャープ信号を含む受信信号に対応する場合、結合信号の雑音レベルが求められる。
【0094】
次にプロセスはステップS11に進み、ステップS11において、現在のパッシブモード動作のためのさらなる周波数掃引信号が生成されるか否かの判断が行われる。
【0095】
たとえば、パッシブモード動作において生成される周波数掃引信号の所定の数を設定することができる。次に、プロセスはステップS3に戻り、パッシブモード動作のための所定の数の周波数掃引信号が生成されるまで、ステップS3〜S11における処理動作が反復される。
【0096】
現在のパッシブモード動作のための全ての周波数掃引信号が生成されると、プロセスはステップS13に進む。
【0097】
次に、ステップS13において、周波数チャープ信号を含む信号に対応するものとしてステップ9において特定された結合信号、及び該信号の測定された雑音レベルに従って、複数の周波数掃引信号が選択される。より詳細には、識別された結合信号を生成した所定の数の周波数掃引信号が選択される。ここで、選択される周波数掃引信号は、測定された雑音レベルが最も低い周波数掃引信号である。
【0098】
次にプロセスはステップS15に進み、ステップS15において、選択された複数の周波数掃引信号から、出力レーダー波形として送信される掃引パターンが生成される。
【0099】
上記の実施形態では、ステップS11における処理が、所定の数の周波数掃引信号がまだ生成されていないと判断すると、処理はステップS3に戻り、ステップS3において、新たな信号が受信される。したがって、ステップS7において、ステップS5において生成される各周波数掃引信号がそれぞれの受信信号と結合される。すなわち、異なる受信信号が各周波数掃引信号と結合される。
【0100】
代替的な実施形態において、ステップS3において受信された信号が格納され、ステップS11における処理が、所定の数の周波数掃引信号がまだ生成されていないと判断すると、処理はステップS5に戻る。このようにして、次にステップS7において、各周波数掃引信号が同じ格納された受信信号と結合され、結合信号が生成される。
【0101】
したがって、ステップS9において実行される処理は、周波数チャープ信号を含む1つ又は複数の受信信号(すなわち、ステップ3において受信される信号が格納される場合、1つの受信信号であり、周波数掃引信号毎に新たな信号が用いられる場合、2つ以上の信号)に対応する結合信号を特定することが理解されよう。
【0102】
有利には、受信信号と複数の周波数掃引信号との結合は、並行動作として実行することができる。これによって、パッシブモード動作の持続時間が減少する。
【0103】
アクティブモード
パッシブモードの後、適切な制御信号APをTCAユニット206がモードスイッチPAS207に印加することによって、アクティブモードが開始される。
【0104】
アクティブモードにおいて、レーダーは、そのアンテナTAN107を介して、パッシブモードにおいて求められた1つ又は複数の掃引パターンを送信する。
【0105】
アクティブモードにおいて、干渉分類器ICR203は、アイドルのままであり、バッファー/スライサーFRM202に格納されるデータブロックDBに対して「トランスペアレント」である。
【0106】
アクティブモードにおいて用いられる1つ又は複数の掃引パターンは、パッシブモードにおいて被試験環境で良好な性能を有するように構築されているので、自動車FMCWレーダーはマルチユーザー干渉に対して改善した耐性で動作する。
【0107】
最も良好な掃引パターンを選択することによって相互干渉の効果が低減するが、干渉は完全に除去されない場合がある。したがって、自動車FMCWレーダーの測距性能は、バッファー/スライサーFRM202とフーリエシグナルプロセッサFFT205との間にブランキング回路BLR204を組み込むことによってさらに改善される。
【0108】
以下、ブランキング回路BLR204の動作を説明する。
【0109】
まず、データフレームのJ個全てのデータブロックのrms値等の平均レベルが求められる。干渉検出閾値が設けられている。本明細書では、干渉検出閾値は、ブランキング閾値と呼ばれる。たとえば、閾値はデータrms値の4倍に設定することができる。好ましくは、閾値はシステムの雑音レベルの固定値倍(たとえば10倍)を超えるように設定することができる。
【0110】
次に、J個のデータブロックのそれぞれがテストされる。被試験ブロックのrms値がブランキング閾値を超える場合、データブロックはオールゼロブロックと置き換えられる。結果として、ブランキング回路BLR204は、破損したデータブロックが全てオールゼロブロックに置換された変更データフレームZFを、フーリエシグナルプロセッサFFT205に転送する。そのような動作はデータフレーム内で個々のデータブロックが現れる順序を変更しないことに留意すべきである。
【0111】
ブランキング動作によって背景雑音レベルが低減されるので、フーリエシグナルプロセッサFFT205によって用いられる信号検出閾値も低減されるべきである。したがって、ブランキング回路BLR204は、適切に低減された閾値DTをプロセッサFFT205に送信する。変更された閾値DTは、データフレーム内に保有される元のデータブロックの数に比例する。
【0112】
フーリエシグナルプロセッサFFT205は、各周波数掃引パラメーター、すなわちその開始時刻、掃引持続時間TS及び掃引周波数帯域Δfを示す信号SSを受信する。
【0113】
DSPによって実装することができるフーリエシグナルプロセッサ205は、物体の距離R及び/又は速度Vの計算を実行するようになっている。
【0114】
自動車FMCWレーダーは、各モードの動作後にパッシブモードとアクティブモードとの間で交互に切り換わるようにすることもでき、又はパッシブモードが用いられる頻度の方が低くなるようにすることもできる。
【0115】
図3b)は、アクティブモードにおいて本実施形態の自動車レーダーシステムによって実行される処理動作を要約するフローチャートである。
【0116】
図3b)を参照すると、ステップS21において、パッシブモード動作において求められた掃引パターンによって規定された周波数掃引を含むレーダー波形が自動車レーダーシステムから送信される。
【0117】
次に、プロセスはステップS23に進み、ステップS23において、送信レーダー波形の反射が受信される。
【0118】
次に、プロセスはステップS25に進み、ステップS25において、受信信号とステップS21において前もって送信されたような一連の掃引とが従来の方法により結合され、複数の結合信号、すなわち周波数掃引ごとに1つの結合信号が生成される。デジタルデータのフレームが格納され、各フレームはそれぞれの結合信号に対応する。
【0119】
次に、プロセスはステップS27に進み、ステップS27において、各フレームは複数のデータブロックに分割され、その後ステップS29に進み、ステップS29において、各フレームは該フレーム内のデータブロックの雑音レベルを求めるために処理される。
【0120】
次に、プロセスはステップS31に進み、ステップS31において、データブロックの雑音レベルがそのフレームについての所定のレベルを超える各データブロックのデジタルデータにブランキングが適用される。
【0121】
次に、プロセスはステップS33に進み、ステップS33において、ブランキングが適用されたフレームを含むフレームに依拠して、物体の距離及び/又は速度が求められる。
【0122】
次に、プロセスはステップS35に進み、ステップS35において、アクティブモードが終了する。
【0123】
処理は、自動的にステップS19に戻って新たなアクティブモード動作を開始するようにすることもでき、又は図3a)のステップS1に戻って新たなパッシブモード動作を開始するようにすることもできる。
【0124】
干渉分類器
次に、上記の図2の実施形態において干渉分類器ICR203として用いることができる様々な干渉分類器を説明する。
【0125】
観測される過渡干渉の持続時間も電力も、そのような干渉のタイプに関する有用な情報を一切提供することができず、したがって異なる原理に基づいて動作する干渉分類器を用いなくてはならないことに留意すべきである。
【0126】
上述した実施形態において用いるのに適した第1のタイプの干渉分類器ICR203は、検査中のサンプルのセットから尖度値を求めることによって周波数チャープ干渉を特定する処理を実行する。
【0127】
尖度は4次中心積率と2次中心積率の二乗との比として規定される。したがって、K個のゼロ平均信号サンプルx1,x2,...,xk,...,xKの場合、
【0128】
【数12】
【0129】
から経験的な尖度ΚXを求めることができる。
【0130】
ランダムガウスプロセスによってモデル化された雑音の場合、尖度は雑音レベルと関係なく3に等しい。一方、任意の振幅のランダムにサンプリングされた正弦波の場合、尖度は1.5に等しい。したがって、第1のタイプの干渉分類器ICR203は、検査中のサンプルのセットから求められた経験的尖度の値を所定の閾値と比較して、該セットが雑音を表す可能性がより高いか、又はそうではなくランダムにサンプルされた正弦波である可能性がより高いかを判定する。
【0131】
次に、本発明者らによって考案され、上記の図2の実施形態において干渉分類器ICR203として用いることができる、改善された第2のタイプの干渉分類器を説明する。
【0132】
最初に、改善された干渉分類器の裏にある基礎を成す理論を提供する。
【0133】
標準的な背景雑音(たとえば熱雑音)及びパルス状高レベル干渉(すなわち過渡干渉)を含む受信信号を考察する。そのような過渡干渉は、広帯域雑音の短いバースト又は周波数変調されたキャリア(チャープ)を有するパルスのいずれかから発生した場合がある。
【0134】
離散時間信号処理を用いるシステムにおいて、雑音バーストによって、ガウス分布を有する一連のサンプルが生じるのに対し、周波数チャープは一定振幅の正弦波のランダムサンプリングにより取得される特徴と同じ特徴を有するサンプルを生成する。
この観測を多くの異なる形で利用して、雑音バーストとチャープとを識別する統計的手順を開発することができる。しかしながら、上述したように、観測される過渡干渉の持続時間も電力も、そのような干渉のタイプに関する有用な情報を一切提供することができない。
【0135】
統計的観点から、雑音バーストBと周波数チャープCとを識別する問題は、2つの代替的仮説(alternative hypotheses)H0及びH1のうちの一方を選択することに等しい。ここで、
H0=雑音バーストBが存在する
H1=チャープCが存在する
である。
【0136】
したがって、K個の信号サンプルx1,x2,...,xk,...,xKは2つの条件付き確率密度関数、すなわち
【0137】
【数13】
【0138】
のうちの一方によって特徴付けられる。
【0139】
仮説H1は、尤度比L(x1,x2,...,xK)が或る所定の判定閾値レベルを超えたときに選択される。
【0140】
尤度比は以下のように規定される。
【0141】
【数14】
【0142】
実際には、対数尤度比ln Lに基づいて等価な手順を利用することがより好都合である。ここで、
【0143】
【数15】
【0144】
であり、ここで、TXは所定の判定閾値である。
【0145】
分類される干渉レベルはアプリオリに知ることができない。
【0146】
しかしながら、この干渉分類器ICR203は、後述するように、信号サンプルを最初に正規化することによって周波数チャープと雑音バーストとを識別するための大幅に改善された実際的手順を提供する。
【0147】
平均絶対偏差を利用する正規化−ロバストな分類器
正規化の1つの形式によれば、利用可能なデータから適切な範囲のデータブロックが選択され、ブロック内のK個の信号サンプルx1,x2,...,xk,...,xKを用いて、以下のように平均絶対偏差を求める。
【0148】
【数16】
【0149】
データブロックの範囲は、最も短い予期される過渡干渉の大部分を捕捉するように選択される。平均絶対偏差MAが所定の判定閾値TNを超えるとき、干渉の存在が宣言される。
【0150】
好ましくは、判定閾値TNは、背景雑音のrms(二乗平均平方根(root-mean-squared))値σNよりも約3倍又は約4倍大きい値にセットされる。
【0151】
雑音バーストBの場合、平均絶対偏差は、
【0152】
【数17】
【0153】
に向かう。ここで、
【0154】
【数18】
【0155】
であり、σBはそれぞれの分散σN2及びσO2を有する背景雑音及びバースト雑音の和のrms値である。
【0156】
振幅Aを有するチャープCが観測され、かつ背景雑音のレベルが低い(たとえばσN<A/5)とき、平均絶対偏差MAはほぼ
【0157】
【数19】
【0158】
に等しい。
【0159】
実際には、双方のパラメーターσE及びAが未知であることに留意する。
【0160】
サンプルの一次シーケンス{xk}は、正規化変換を用いることによって対応する二次シーケンス{yk}に変換される。
【0161】
【数20】
【0162】
上記の変換の目的は、未知のパラメーターσE及びAと無関係に観測値{yk}を作成することである。
【0163】
雑音バーストBの場合、サンプル{yk}は、形態
【0164】
【数21】
【0165】
の確率密度関数を有するガウス非負確率変数の実現値を表す。
【0166】
チャープCが観測される場合、確率密度関数p(y|C)は、背景雑音が無視できるとき、すなわちA≫σNのときにのみ閉形式で表すことができる。そのような場合、
【0167】
【数22】
【0168】
である。
【0169】
他方で、背景雑音が存在する場合、付加雑音の拡散効果を考慮に入れると、p(y|C)は、基礎を成す通常の確率密度関数p0(y)を表すものとみなすことができる。ここで、
【0170】
【数23】
【0171】
である。
【0172】
表現p(y|C)の形状と基礎を成す確率密度関数P0(y)の形状との間の差異は、付加雑音のレベルが高くなると増加する。
【0173】
図4は、雑音レベルの選択された値(この場合、比A/σN)についてP0(y)を表す確率密度関数p(y|C)の形状を示している。
各プロットは、108個の複製を利用してモンテカルロコンピューター法から取得されているが、P0(y)の他の表現を用いて雑音レベルに応じて確率密度関数を生成することができることが理解されよう。見て取ることができるように、引数yがゼロに近づくと、確率関数は、式15において予測されるように、値が限界4/π2≒0.4に近づくものと想定する。
【0174】
比較の目的で、図4は雑音バーストBの確率密度関数p(y|B)も示している。
【0175】
対数尤度比は以下のように規定される。
【0176】
【数24】
【0177】
周波数チャープCの存在は、式16において規定されるような対数尤度比が所定の判定閾値を超えるときに宣言される。そうでない場合、処理されているサンプルは雑音バーストBを表すものとして分類される。
【0178】
代替的に、干渉するチャープCの存在は、式17に示すように、K個の非線形に変換されたサンプルy1,y2,...,yk,...,yKの平均GKが適切な判定閾値TCGを超えたときに宣言される。
【0179】
【数25】
【0180】
ここで、非線形変換D(y)は、式16に登場した関数[ln p(yk|C)−lnp(yk|B)]の適切な表現である。
【0181】
以下において、平均絶対偏差に基づく正規化を利用する干渉分類器を、本明細書においてロバストな干渉分類器と呼ぶ。
【0182】
非線形性D(y)は、背景雑音が無視できるとき、すなわちΨ=A/σN→∞のときにのみ、閉形式で表すことができる。そのような場合、
【0183】
【数26】
【0184】
である。
【0185】
図5は、比A/σNの選択された値について非線形性D(y)の形状を示している。各プロットは、108個の複製を用いてモンテカルロコンピューター法から取得されている。
【0186】
引数yがゼロに近づくと、非線形性D(y)は、上記の式から予測されるように、値が限界ln(2/π)≒−0.45に近づくものと想定する。比較の目的で、図5は、無視できる背景雑音の場合の非線形性D(y)、すなわちA/σN→∞も示している。
【0187】
図5から見てとることができるように、非線形性D(y)の形状は、異なる値のA/σNについて概ね同じであり、D(y)の最大値はA/σNの値が増加するのと共に増加する。全ての場合において、最大値は距離1.4〜1.7のyの値について生じる。
【0188】
本干渉分類器のさらなる特徴によれば、非線形性D(y)は、2つの標準関数、すなわちローレンツ関数及び放物線の重ね合わせによって近似される。
【0189】
比A/σNに関わらず、非線形性D(y)は、D(y)のピークにおいて合体する2つのブランチで構成されるものとみなすことができる。D(y)の左のブランチは、以下の形式の下方シフトされたローレンツ関数の一部によって近似することができる。
【0190】
【数27】
【0191】
右のブランチは、放物線の一部によって表すことができる。
【0192】
【数28】
【0193】
たとえば、A/σN=10のとき、以下のパラメーター値を用いて良好な近似を達成することが可能である。
【0194】
【数29】
【0195】
図6は、A/σN=10の場合の非線形性D(y)、並びにまた、ローレンツ関数及び放物線の組み合わせを用いて本干渉分類器203に従って構築された、その非線形性D(y)の近似を示している。
【0196】
非線形性D(y)を多くの異なる形で近似することができることが理解されよう。しかしながら、各近似は何らかの意味で、図5に示す非線形性の一般形状を表現するとともに模倣しようとする。たとえば、左ブランチは直線で近似することができ、右ブランチは異なる直線で近似することができる。
【0197】
したがって、それぞれの場合に、近次関数は、雑音がないときはπ/2の引数値(argument value)、又は雑音があるときは約1.4〜1.7の引数値を含む遷移値においてピーク又は水平域を表す(exhibit)(引数値は雑音の拡散効果に起因してπ/2から逸れ、偏差量は雑音量に依拠する)。遷移値を超えない引数値の場合、近似関数は非減少関数となる。さらに、遷移値以上の引数値の場合、近似関数は減少関数となる。一般に、この下落部分の峻度はピーク(又は水平域)に選考する非減少部分の峻度よりもはるかに大きくなる。
【0198】
標準偏差を利用する正規化−最適分類器
正規化手順における平均絶対偏差の適用は、実際的でかつまた統計的にロバストな手法とみなすことができる。しかしながら、理論的観点から、この目的のために標準偏差を用いることが好ましい場合がある。
【0199】
したがって、さらなる形態の干渉分類器203によれば、観測されるサンプルの一次シーケンス{xk}は、正規化変換を適用することによって対応する二次シーケンス{yk}に変換される。
【0200】
【数30】
【0201】
ここで、SDは
【0202】
【数31】
【0203】
から求められる標準偏差である。
【0204】
雑音バーストBの場合、標準偏差SDは単純にσB、すなわち背景雑音及びバースト雑音の和のrms値に等しい(式11を参照されたい)。振幅Aを有するチャープCが観測され、かつ背景雑音のレベルが低い(たとえばσN<A/5)とき、rmsはほぼ
【0205】
【数32】
【0206】
に等しい。
【0207】
雑音バーストBの場合、サンプル{yk}は確率密度関数
【0208】
【数33】
【0209】
を有するガウス非負確率変数の実現を表す。
【0210】
チャープCが観測されるとき、確率密度関数p(y|C)は、背景雑音が無視できるとき、すなわちA/σN≫1のときにのみ閉形式で表すことができる。そのような場合、
【0211】
【数34】
【0212】
である。
【0213】
他方で、背景雑音が存在する場合、付加雑音の拡散効果を考慮に入れると、p(y|C)は、基礎を成す通常の確率密度関数p0(y)を表すものとみなすことができる。ここで、
【0214】
【数35】
【0215】
である。
【0216】
表現p(y|C)の形状と基礎を成す確率密度関数P0(y)の形状との間の差異は、付加雑音のレベルが高くなると増加する。
【0217】
上述したロバストな分類器の場合のように、モンテカルロコンピューターシミュレーションを用いて、選択された雑音レベル値について表現p(y|C)を生成することができる。代替的に、他の形態の表現を用いることもできる。
【0218】
したがって、干渉するチャープCの存在は、式26に示すように、K個の非線形に変換されたサンプルy1,y2,...,yk,...,yKの平均HKが所定の判定閾値TCHを超えたときに宣言される。
【0219】
【数36】
【0220】
ここで、非線形変換V(y)は、関数[ln p(yk|C)−ln p(yk|B)]の適切な表現である。
【0221】
この場合、非線形性V(y)は、上述した非線形性D(y)が表す形状と異なる形状を有する。
【0222】
以下において、標準偏差に基づく正規化を利用する干渉分類器は、ガウス確率変数に関してその標準偏差がスケールを最良に推定するものであることを反映するために、本明細書において最適干渉分類器と呼ばれる。
【0223】
非線形性V(y)は、背景雑音が無視できるとき、すなわちΨ=A/σN→∞のときにのみ、閉形式で表すことができる。そのような場合、
【0224】
【数37】
【0225】
である。
【0226】
図7は、比A/σNの選択された値について非線形性V(y)の形状を示している。各プロットは、108個の複製を用いてモンテカルロコンピューター法から取得されている。
【0227】
引数yがゼロに近づくと、非線形性V(y)は、式27から予測されるように、値が限界−(lnπ)/2≒−0.57に近づくものと想定する。
【0228】
比較の目的で、図7は無視できる背景雑音、すなわちA/σN→∞の場合の非線形性V(y)も示している。
【0229】
図7を図5と比較することにより見てとることができるように、2つの非線形性D(y)及びV(y)の形状は実質的に同じである。しかしながら、非線形性V(y)の場合、最大値は、雑音がないときは
【0230】
【数38】
【0231】
のyの値、又は雑音があるときは約1.3〜1.6の範囲の値で現れる(引数値は雑音の拡散効果に起因して
【0232】
【数39】
【0233】
から逸れ、偏差量は雑音量に依拠する)のに対し、D(y)の最大値は、雑音がないときはπ/2の値、又は雑音があるときは1.4〜1.7の範囲で現れる。
【0234】
図8は、A/σN=10の場合の2つの非線形性D(y)及びV(y)を示している。双方の非線形性が同様の形状を有するが、非線形性V(y)は、関心引数(arguments of interest)の範囲のより良好な識別を提供するようであるので、D(y)より優れていると思われる。
【0235】
標準偏差に基づく正規化を利用する本干渉分類器のさらなる特徴によれば、非線形関数V(y)の近似が適用される。
【0236】
より詳細には、V(y)の左のブランチは、下方シフトされたローレンツ関数の一部によって近似され、
【0237】
【数40】
【0238】
右のブランチは、放物線の一部によって近似される。
【0239】
【数41】
【0240】
たとえば、A/σN=10のとき、以下のパラメーター値を用いて良好な近似を達成することが可能である。
【0241】
【数42】
【0242】
D(y)と同様に、ローレンツ関数及び放物線とは異なる様々な関数を用いてV(y)を近似することができる。これらについては上述したので、本明細書において再び説明しない。
【0243】
他の正規化方法
図2に示す干渉分類器203における正規化の目的のために、幾何平均、中央値、又はトリム平均等の平均信号レベルの他の基準を用いて信号サンプルを正規化することができる。
【0244】
K個の信号サンプル|x1|,|x2|,...,|xk|,...,|xK|の幾何平均MGは、
【0245】
【数43】
【0246】
によって規定される。
【0247】
正規化の目的のために、中央値又はトリム平均は、
【0248】
【数44】
【0249】
となるように昇順で並べられたK個の信号サンプルから求めることができる。
【0250】
このとき、サンプル中央値は、Kが奇数のとき中央サンプルに等しく、そうではなくKが偶数の場合、サンプル中央値は2つの中央サンプルの算術平均に等しい。
【0251】
トリム平均MLは、L個の最も大きなサンプルを除外し、残りのサンプルの算術平均を求めることによって取得され、したがって、
【0252】
【数45】
【0253】
である。
【0254】
正規化の目的で利用することができる平均信号レベルの他の基準がまだ存在する。
【0255】
正規化を実行するのに用いられる平均信号レベルの基準が何であれ、結果としての非線形性は上述した非線形性D(y)及びV(y)と同じ形式及び特性を有する。このため、各非線形性は、1.3〜1.7のyの値を含む遷移値において最大値を有し、yの値が遷移値を超えない場合に非減少関数によって近似でき、yの値が遷移値以上の場合に減少関数によって近似することができる。全ての場合に、減少関数の平均勾配の大きさは、非減少関数の平均勾配の大きさよりも大きくなる。
【0256】
構成例
上述した有利な干渉分類を実装するための干渉分類器ICR203の構成例を以下で説明する。
【0257】
図9は、干渉分類器ICR203の機能ブロック図である。分類器ICR203は以下のブロックを含む。
−データバッファーBFR802、
−正規化器NRM804、
−スケールファクター計算機SCL803、
−非線形変換器NLT805、
−平均化回路AVG806、
−比較器CMR807。
【0258】
動作干渉分類器ICR203を下記で説明する。
【0259】
検査中のデータブロックを形成する複数のK個の信号サンプルx1,x2,...,xk,...,xKが、入力BXを介してデータバッファーBFR802に転送される。
【0260】
出力XXにおいて入手可能なサンプルがスケールファクター計算機SCL803によって用いられ、平均絶対偏差MA又は標準偏差SD等のスケールファクターSCが求められる。選択された正規化のタイプはスケールファクター計算機SCL803の入力STを介して設定される。
【0261】
分類器ICR203は、上述したようにたとえばロバストな分類器又は最適な分類器として動作するように構成することができる。
【0262】
ブロックSCL803によって求められたスケーリングファクターSCは、正規化器NRM804に供給され、二次シーケンスのK個の正規化されたサンプルが計算される。
【0263】
【数46】
【0264】
ここで、正規化されたサンプルy1,y2,...,yk,...,yKはそれぞれ、データバッファーBFR802から入力XKを介して受信された一次信号サンプルx1,x2,...,xk,...,xKに対応する。
【0265】
非線形変換器NLT805は、入力YKにおいて現れる各正規化されたサンプルykを利用して、上記で検討したようなD(yk)及びV(yk)等の対応する値を求める。
【0266】
非線形変換器NLT805は、2つのパラメーター、すなわち非線形性のタイプST(選択された正規化方法に対応する)及び背景雑音のチャープ振幅A及びrms値σNの比の公称値ANを受信する。
【0267】
ANの公称値として、デフォルト値A/σN=10を自動的に選択することができる。代替的に、ANの適切な値を以下のように求めることができる。
【0268】
干渉分類器を組み込むシステムの信頼性のある動作のために、処理される信号のレベルが少なくとも背景雑音のrms値σNよりも少なくともg1倍大きいと仮定する。
そのような最小レベル(g1・σN)を有する信号は、正弦干渉の最も小さな振幅Aがこの最小レベルよりg2倍大きいとき、破損する形で変形し、したがってA=g2・(g1・σN)及び
【0269】
【数47】
【0270】
であることも想定する。たとえば、g1=5及びg2=2であるとき、AN=A/σ=10である。
【0271】
さらに、図5及び図7から見てとることができるように、それぞれの非線形性D(y)及びV(y)の形状は、A/σNがたとえば10から20に増加するときに大きく変化しない。また、より大きな値の振幅Aを有する正弦干渉は、常により高い信頼性で検出することができる。したがって、分類器によって用いられるANの公称値は、好ましくは比A/σNのより低い動作値に対応するように選択される。
【0272】
平均化回路AVG806は、入力VDにおいて受信される非線形に変換された正規化サンプルの平均GHを求める。
【0273】
計算された平均GHは、比較器CMR807において判定閾値CTと比較される。平均GHが判定閾値CTを超えると、干渉チャープの存在が宣言される。そうでない場合、処理されるサンプルは雑音の干渉バーストを表すものとして分類される。
【0274】
干渉、雑音バーストB、又は周波数チャープCの分類に関する判定は、比較器CMR807の出力BCにおいて提供される。さらに、出力SCは、分類される干渉レベルを示すスケールファクターを提供する。
【0275】
広範なモンテカルロシミュレーション法によって、上述した第2のタイプの干渉分類器が上述した第1のタイプの尖度ベースの分類器の性能を凌ぐことができることがわかっている。
【0276】
たとえば、データブロックあたりK=16個のサンプル、及びPFA=0.01において固定された誤警報確率(false-alarm probability)の場合、分類器毎の判定閾値CT及び検出確率PDが以下に与えられる。
【0277】
【表1】
【0278】
上記の文脈において、検出確率PDは、実際にチャープCが存在するときに「チャープCが存在する」と判定する確率であり、誤警報確率PFAは、実際に雑音バーストBが存在するときに「チャープCが存在する」と判定する確率である。
【0279】
上記で与えられた各値は、106個の複製を利用するモンテカルロコンピューター法から取得された。見てとれるように、第2のタイプの干渉分類器のロバストなバージョン及び最適なバージョンは、それぞれ尖度ベースの分類器に対して、検出確率PDにおいて5%及び7%の改善を提供する。
【0280】
例示的な実施例
本発明の実施形態による自動車レーダーの利点の理解を容易にするために、以下で実施例を説明する。
【0281】
異なる周波数の正弦波及び単位rms値の背景雑音を含むビート信号を検討する。各正弦波の振幅は0.27に等しく、そのようなケースは、たとえば、自動車レーダーの視野(field-of-view)(FOV)に現れる3つの非常に小さな物体を表すことができる。
【0282】
図10のa)は、ビート信号を表す512個のサンプルを含むデータフレームを示している。正弦波は雑音にかなり埋もれているが、対応する周波数成分は図10のb)に示す周波数領域表現において明確に見ることができる。
【0283】
図11のa)は、同じデータフレームであるが、それぞれが同じ振幅25を有する3つの高レベル周波数チャープによってさらに破損されたデータフレームを示している。比較のために、ブランキング閾値レベルBTHも示されている。このケースでは、図11のb)に示す周波数領域表現が、干渉チャープの複数の周波数成分によって支配され、関心周波数成分は検出可能でない。
【0284】
高レベル周波数チャープを除去したブランキング動作によって変更されたデータフレームを示す図12のa)、及びデータフレームの周波数領域表現を示す図12のb)に示されるように、ブランキング手順を適用する試みはこのケースでは失敗する。
【0285】
図13のa)は、自動車レーダーによって送信された周波数掃引が周波数において適切にシフトされ(すなわち、異なる掃引パターンが用いられ)、3つの干渉チャープのうちの1つが回避されたときの対応するデータフレームを示している。しかしながら、図13のb)に示す周波数領域表現において、関心周波数成分は依然として検出するのが困難である。
【0286】
検出を改善するために、図13のa)に示すデータフレームに適切なブランキング閾値レベルBTHを用いてブランキングが適用され、それによって図14a)に示すようになる。変更されたデータフレームが図14のa)に示され、干渉チャープによって破損された元もブロックに置き換えられた2つのオールゼロデータブロックを含む。
【0287】
図14のb)に示す変更されたデータフレームの周波数領域表現によって、全て検出閾値を超えた所望の3つの周波数成分の存在がはっきりと明らかになる。
【0288】
上記の実施例において、ブランキングのみではマルチユーザー干渉の効果を抑制するのに十分でなかった。しかしながら、信号ブランキングと併せて送信周波数掃引の適応的な選択を用いることによって、信頼性のある検出が達成された。
【0289】
しかしながら、代替的なシナリオにおいて、信号ブランキングをさらに必要とすることなく、送信周波数掃引の適応的な選択のみで、信頼性のある検出を達成するのに十分である場合がある。
【0290】
変更及び変形
上述した実施形態に対し、多くの変更及び変形を行うことができる。
【0291】
たとえば、図2に示す実施形態は、ハードウェアコンポーネントを備える。しかしながら、一実施形態は、ソフトウェア、ファームウェア、又はソフトウェア、ファームウェア、及びハードウェアの任意の組み合わせを用いて実施することができる。
たとえば、図15は、干渉分類器ICR203、ブランキング回路BLR204、フーリエシグナルプロセッサFFT205、タイミング/制御/算術ユニットTCA206、及び波形発生器WFG110が全て、コンピュータープログラム命令によってプログラムされたプログラム可能な処理装置1503によって実装されて上述した処理動作を実行する一実施形態を示している。
コンピュータープログラム命令は、たとえばストレージ媒体1501等のコンピュータープログラム製品又は信号1502に対し与えられる。
【0292】
本発明の実施形態の上記の説明は、説明及び記述の目的で提示された。上記の説明は、網羅的であることも、本発明を開示された形式に限定することも意図していない。上記の説明を鑑みて、多くの代替形態、変更形態、及び変形形態によって、当業者が本発明を検討される特定の使用に適した様々な実施形態において利用することが可能になることは明らかである。
【特許請求の範囲】
【請求項1】
マルチユーザー送信環境において出力レーダー波形として送信される掃引パターンを求めるように動作可能な自動車レーダーシステムであって、
前記環境内の1つ若しくは複数の他のユーザーによって生成されたバースト雑音、周波数チャープ信号、又はそれらの組み合わせを含む雑音信号を受信するように動作可能な受信機と、
複数の異なる周波数掃引信号を生成するように動作可能な信号発生器と、
各周波数掃引信号を受信雑音信号と結合して、該周波数掃引信号毎に結合信号を生成するように動作可能な信号結合器と、
前記周波数チャープ信号を含む1つ又は複数の前記受信雑音信号に対応する結合信号を特定すると共に、該特定された前記周波数チャープ信号を含む1つ又は複数の前記受信雑音信号に対応する結合信号のそれぞれの雑音レベルを求めるように動作可能な干渉分類器と、
前記干渉分類器によって求められた前記雑音レベルに従って複数の前記周波数掃引信号を選択するように動作可能なセレクターと、
前記出力レーダー波形として送信される、前記選択された複数の前記周波数掃引信号を含む掃引パターンを求めるように動作可能な制御ユニットと、
を備える、自動車レーダーシステム。
【請求項2】
前記求められた掃引パターンを出力レーダー波形として送信するように動作可能な送信機と、
前記自動車レーダーシステムの前記動作をパッシブモードとアクティブモードとの間で切り換えるように動作可能なスイッチと、
をさらに備え、
前記パッシブモードにおいて、前記自動車レーダーシステムは、1つ又は複数の前記受信雑音信号から前記掃引パターンを求めるようになっており、
前記アクティブモードにおいて、前記自動車レーダーシステムは、前記パッシブモードにおいて求められた前記掃引パターンによって規定された周波数掃引を含むレーダー波形信号を送信すると共に、該送信されたレーダー波形の反射を含む受信信号を処理するようになっている、請求項1に記載の自動車レーダーシステム。
【請求項3】
デジタルデータのフレームを格納するように構成されるバッファーであって、各フレームはそれぞれの前記周波数掃引信号のための前記結合信号に対応する、バッファーと、
前記フレームの前記デジタルデータにブランキングを適用するように動作可能なブランキング回路と、
をさらに備え、
前記アクティブモードにおいて、前記ブランキング回路は前記周波数掃引信号のための結合信号に対応するフレームを処理し、該フレームをデータブロックに分割して、該フレーム内の該データブロックの雑音レベルを求めると共に、該データブロックの該雑音レベルが所定のレベルを超えている場合、該データブロックにブランキングを適用するように動作可能であり、
前記自動車レーダーシステムは、前記ブランキングが適用されたフレームに依拠して物体の距離及び速度のうちの少なくとも一方を検出するようになっている、
請求項2に記載の自動車レーダーシステム。
【請求項4】
前記信号結合器は、ダウンコンバーターにおいて前記受信信号を前記周波数掃引信号と結合して前記結合信号を生成するように動作可能である、請求項1〜3のいずれか1項に記載の自動車レーダーシステム。
【請求項5】
前記干渉分類器は、尖度ベースの干渉分類機である、請求項1〜4のいずれか1項に記載の自動車レーダーシステム。
【請求項6】
前記干渉分類器は、前記周波数掃引信号毎に前記結合信号のサンプルを処理するように動作可能であり、
該干渉分類器は、
前記信号サンプルの前記レベルに依拠して前記信号サンプルのためのスケールファクターを計算するように動作可能なスケールファクター計算機と、
前記スケールファクターを用いて前記信号サンプルを正規化することによって、正規化信号サンプルyを計算するように動作可能な正規化器と、
前記正規化信号サンプルに対し非線形変換T(y)を実行して、変換された信号サンプルを計算するように動作可能な非線形変換器と、
前記変換された信号サンプルの平均レベルを計算するように動作可能な平均化回路と、
前記変換された信号サンプルの前記計算された平均レベルを所定の閾値レベルと比較して、前記結合信号内に存在する前記雑音が周波数チャープ信号を含むか否かを判断するように動作可能な比較器と、
を備え、
前記非線形変換器は、第1の関数T1(y)及び第2の関数T2(y)の組み合わせを含む非線形変換T(y)を実行するように動作可能であり、前記第1の関数は、遷移値ytを超えない値を有する正規化信号サンプルに適用される変換を規定し、前記第2の関数は、遷移値yt以上の値を有する正規化信号サンプルに適用される変換を規定し、
T1(y)は正規化信号サンプル値の増加に対する非減少関数であり、
T2(y)は正規化信号サンプル値の増加に対する減少関数であり、
遷移値は1.3≦yt≦1.7の範囲の値を有する、請求項1〜4のいずれか1項に記載の自動車レーダーシステム。
【請求項7】
前記第1の関数T1(y)は正規化信号サンプル値の増加に対する増加関数であり、T1(y)の平均勾配の大きさはT2(y)の平均勾配の大きさよりも小さい、請求項6に記載の自動車レーダーシステム。
【請求項8】
マルチ自動車レーダー環境において自動車レーダーによって出力レーダー波形として出力される掃引パターンを求める方法であって、
前記環境内の1つ若しくは複数の他の自動車レーダーによって生成されたバースト雑音、周波数チャープ信号、又はそれらの組み合わせを含む1つ又は複数の雑音信号を受信すること、
複数の異なる周波数掃引信号を生成すること、
各周波数掃引信号を前記受信雑音信号と結合することであって、該周波数掃引信号毎に前記結合信号を生成する、結合すること、
前記周波数チャープ信号を含む1つ又は複数の前記受信雑音信号に対応する結合信号を特定すると共に、前記周波数チャープ信号を含む受信雑音信号に対応する各特定された結合信号のそれぞれの雑音レベルを求めること、
前記周波数チャープ信号を含む1つ又は複数の前記受信雑音信号に対応する前記結合信号の前記求められた雑音レベルに従って複数の前記周波数掃引信号を選択すること、及び
前記出力レーダー波形として送信される、前記選択された複数の前記周波数掃引信号を含む掃引パターンを求めること、
を含む、方法。
【請求項9】
前記求められた掃引パターンを前記出力レーダー波形として送信すること、
パッシブモードとアクティブモードとの間で切り換えること、
をさらに含み、
前記パッシブモードにおいて、1つ又は複数の前記受信雑音信号から前記掃引パターンが求められ、
前記アクティブモードにおいて、前記パッシブモードにおいて求められた前記掃引パターンによって規定された周波数前記掃引を含むレーダー波形信号が送信され、該送信されたレーダー波形の反射を含む受信信号が処理される、請求項8に記載の方法。
【請求項10】
前記アクティブモードは、
デジタルデータのフレームを格納することであって、各フレームはそれぞれの前記周波数掃引信号のための結合信号に対応する、格納すること、
前記周波数掃引信号のための結合信号に対応するフレームを処理することであって、該フレームをデータブロックに分割すると共に該フレーム内の該データブロックの雑音レベルを求め、該データブロックの該雑音レベルが所定のレベルを超えている場合、該データブロックの前記デジタルデータにブランキングを適用する、処理すること、並びに
前記ブランキングが適用されたフレームに依拠して物体の距離及び速度のうちの少なくとも一方を検出すること、
を含む、請求項9に記載の方法。
【請求項11】
各周波数掃引信号を前記受信雑音信号と結合するプロセスは、前記受信信号を前記周波数掃引信号とダウンコンバートすることであって、前記結合信号を生成する、ダウンコンバートすることを含む、請求項8〜10のいずれか1項に記載の方法。
【請求項12】
前記周波数チャープ信号を含む前記受信雑音信号に対応する結合信号を特定するプロセスは、尖度ベースの干渉分類法を含む、請求項8〜11のいずれか1項に記載の方法。
【請求項13】
前記周波数チャープ信号を含む前記受信雑音信号に対応する結合信号を特定するプロセスは、
前記結合信号の信号サンプルを用いることであって、該信号サンプルのレベルに依拠してスケールファクターを計算する、用いること、
前記スケールファクターを用いて前記信号サンプルを正規化することによって、正規化信号サンプルyを計算すること、
前記正規化信号サンプルyに対し非線形変換T(y)を実行することであって、変換された信号サンプルを計算する、実行すること、
前記変換された信号サンプルの平均レベルを計算すること、及び
前記変換された信号サンプルの前記計算された平均レベルを所定の閾値レベルと比較することであって、前記結合信号内に存在する前記雑音のタイプを判断する、比較すること、
を含み、
前記非線形変換T(y)は、第1の関数T1(y)及び第2の関数T2(y)の組み合わせを含み、前記第1の関数は遷移値ytを超えない値を有する正規化信号サンプルに適用される変換を規定し、前記第2の関数は、遷移値yt以上の値を有する正規化信号サンプルに適用される変換を規定し、
T1(y)は正規化信号サンプル値の増加に対する非減少関数であり、
T2(y)は正規化信号サンプル値の増加に対する減少関数であり、
遷移値ytは1.3≦yt≦1.7の範囲の値を有する、請求項8〜11のいずれか1項に記載の方法。
【請求項14】
前記非線形変換を実行するプロセスにおいて、前記第1の関数T1(y)は正規化信号サンプル値の増加に対する増加関数であり、T1(y)の平均勾配の大きさはT2(y)の平均勾配の大きさよりも小さい、請求項13に記載の方法。
【請求項15】
プログラム可能な処理装置をプログラムして請求項8〜14の少なくとも1項に記載の方法を実行するように動作可能にするコンピュータープログラム命令を担持するコンピュータープログラム製品。
【請求項1】
マルチユーザー送信環境において出力レーダー波形として送信される掃引パターンを求めるように動作可能な自動車レーダーシステムであって、
前記環境内の1つ若しくは複数の他のユーザーによって生成されたバースト雑音、周波数チャープ信号、又はそれらの組み合わせを含む雑音信号を受信するように動作可能な受信機と、
複数の異なる周波数掃引信号を生成するように動作可能な信号発生器と、
各周波数掃引信号を受信雑音信号と結合して、該周波数掃引信号毎に結合信号を生成するように動作可能な信号結合器と、
前記周波数チャープ信号を含む1つ又は複数の前記受信雑音信号に対応する結合信号を特定すると共に、該特定された前記周波数チャープ信号を含む1つ又は複数の前記受信雑音信号に対応する結合信号のそれぞれの雑音レベルを求めるように動作可能な干渉分類器と、
前記干渉分類器によって求められた前記雑音レベルに従って複数の前記周波数掃引信号を選択するように動作可能なセレクターと、
前記出力レーダー波形として送信される、前記選択された複数の前記周波数掃引信号を含む掃引パターンを求めるように動作可能な制御ユニットと、
を備える、自動車レーダーシステム。
【請求項2】
前記求められた掃引パターンを出力レーダー波形として送信するように動作可能な送信機と、
前記自動車レーダーシステムの前記動作をパッシブモードとアクティブモードとの間で切り換えるように動作可能なスイッチと、
をさらに備え、
前記パッシブモードにおいて、前記自動車レーダーシステムは、1つ又は複数の前記受信雑音信号から前記掃引パターンを求めるようになっており、
前記アクティブモードにおいて、前記自動車レーダーシステムは、前記パッシブモードにおいて求められた前記掃引パターンによって規定された周波数掃引を含むレーダー波形信号を送信すると共に、該送信されたレーダー波形の反射を含む受信信号を処理するようになっている、請求項1に記載の自動車レーダーシステム。
【請求項3】
デジタルデータのフレームを格納するように構成されるバッファーであって、各フレームはそれぞれの前記周波数掃引信号のための前記結合信号に対応する、バッファーと、
前記フレームの前記デジタルデータにブランキングを適用するように動作可能なブランキング回路と、
をさらに備え、
前記アクティブモードにおいて、前記ブランキング回路は前記周波数掃引信号のための結合信号に対応するフレームを処理し、該フレームをデータブロックに分割して、該フレーム内の該データブロックの雑音レベルを求めると共に、該データブロックの該雑音レベルが所定のレベルを超えている場合、該データブロックにブランキングを適用するように動作可能であり、
前記自動車レーダーシステムは、前記ブランキングが適用されたフレームに依拠して物体の距離及び速度のうちの少なくとも一方を検出するようになっている、
請求項2に記載の自動車レーダーシステム。
【請求項4】
前記信号結合器は、ダウンコンバーターにおいて前記受信信号を前記周波数掃引信号と結合して前記結合信号を生成するように動作可能である、請求項1〜3のいずれか1項に記載の自動車レーダーシステム。
【請求項5】
前記干渉分類器は、尖度ベースの干渉分類機である、請求項1〜4のいずれか1項に記載の自動車レーダーシステム。
【請求項6】
前記干渉分類器は、前記周波数掃引信号毎に前記結合信号のサンプルを処理するように動作可能であり、
該干渉分類器は、
前記信号サンプルの前記レベルに依拠して前記信号サンプルのためのスケールファクターを計算するように動作可能なスケールファクター計算機と、
前記スケールファクターを用いて前記信号サンプルを正規化することによって、正規化信号サンプルyを計算するように動作可能な正規化器と、
前記正規化信号サンプルに対し非線形変換T(y)を実行して、変換された信号サンプルを計算するように動作可能な非線形変換器と、
前記変換された信号サンプルの平均レベルを計算するように動作可能な平均化回路と、
前記変換された信号サンプルの前記計算された平均レベルを所定の閾値レベルと比較して、前記結合信号内に存在する前記雑音が周波数チャープ信号を含むか否かを判断するように動作可能な比較器と、
を備え、
前記非線形変換器は、第1の関数T1(y)及び第2の関数T2(y)の組み合わせを含む非線形変換T(y)を実行するように動作可能であり、前記第1の関数は、遷移値ytを超えない値を有する正規化信号サンプルに適用される変換を規定し、前記第2の関数は、遷移値yt以上の値を有する正規化信号サンプルに適用される変換を規定し、
T1(y)は正規化信号サンプル値の増加に対する非減少関数であり、
T2(y)は正規化信号サンプル値の増加に対する減少関数であり、
遷移値は1.3≦yt≦1.7の範囲の値を有する、請求項1〜4のいずれか1項に記載の自動車レーダーシステム。
【請求項7】
前記第1の関数T1(y)は正規化信号サンプル値の増加に対する増加関数であり、T1(y)の平均勾配の大きさはT2(y)の平均勾配の大きさよりも小さい、請求項6に記載の自動車レーダーシステム。
【請求項8】
マルチ自動車レーダー環境において自動車レーダーによって出力レーダー波形として出力される掃引パターンを求める方法であって、
前記環境内の1つ若しくは複数の他の自動車レーダーによって生成されたバースト雑音、周波数チャープ信号、又はそれらの組み合わせを含む1つ又は複数の雑音信号を受信すること、
複数の異なる周波数掃引信号を生成すること、
各周波数掃引信号を前記受信雑音信号と結合することであって、該周波数掃引信号毎に前記結合信号を生成する、結合すること、
前記周波数チャープ信号を含む1つ又は複数の前記受信雑音信号に対応する結合信号を特定すると共に、前記周波数チャープ信号を含む受信雑音信号に対応する各特定された結合信号のそれぞれの雑音レベルを求めること、
前記周波数チャープ信号を含む1つ又は複数の前記受信雑音信号に対応する前記結合信号の前記求められた雑音レベルに従って複数の前記周波数掃引信号を選択すること、及び
前記出力レーダー波形として送信される、前記選択された複数の前記周波数掃引信号を含む掃引パターンを求めること、
を含む、方法。
【請求項9】
前記求められた掃引パターンを前記出力レーダー波形として送信すること、
パッシブモードとアクティブモードとの間で切り換えること、
をさらに含み、
前記パッシブモードにおいて、1つ又は複数の前記受信雑音信号から前記掃引パターンが求められ、
前記アクティブモードにおいて、前記パッシブモードにおいて求められた前記掃引パターンによって規定された周波数前記掃引を含むレーダー波形信号が送信され、該送信されたレーダー波形の反射を含む受信信号が処理される、請求項8に記載の方法。
【請求項10】
前記アクティブモードは、
デジタルデータのフレームを格納することであって、各フレームはそれぞれの前記周波数掃引信号のための結合信号に対応する、格納すること、
前記周波数掃引信号のための結合信号に対応するフレームを処理することであって、該フレームをデータブロックに分割すると共に該フレーム内の該データブロックの雑音レベルを求め、該データブロックの該雑音レベルが所定のレベルを超えている場合、該データブロックの前記デジタルデータにブランキングを適用する、処理すること、並びに
前記ブランキングが適用されたフレームに依拠して物体の距離及び速度のうちの少なくとも一方を検出すること、
を含む、請求項9に記載の方法。
【請求項11】
各周波数掃引信号を前記受信雑音信号と結合するプロセスは、前記受信信号を前記周波数掃引信号とダウンコンバートすることであって、前記結合信号を生成する、ダウンコンバートすることを含む、請求項8〜10のいずれか1項に記載の方法。
【請求項12】
前記周波数チャープ信号を含む前記受信雑音信号に対応する結合信号を特定するプロセスは、尖度ベースの干渉分類法を含む、請求項8〜11のいずれか1項に記載の方法。
【請求項13】
前記周波数チャープ信号を含む前記受信雑音信号に対応する結合信号を特定するプロセスは、
前記結合信号の信号サンプルを用いることであって、該信号サンプルのレベルに依拠してスケールファクターを計算する、用いること、
前記スケールファクターを用いて前記信号サンプルを正規化することによって、正規化信号サンプルyを計算すること、
前記正規化信号サンプルyに対し非線形変換T(y)を実行することであって、変換された信号サンプルを計算する、実行すること、
前記変換された信号サンプルの平均レベルを計算すること、及び
前記変換された信号サンプルの前記計算された平均レベルを所定の閾値レベルと比較することであって、前記結合信号内に存在する前記雑音のタイプを判断する、比較すること、
を含み、
前記非線形変換T(y)は、第1の関数T1(y)及び第2の関数T2(y)の組み合わせを含み、前記第1の関数は遷移値ytを超えない値を有する正規化信号サンプルに適用される変換を規定し、前記第2の関数は、遷移値yt以上の値を有する正規化信号サンプルに適用される変換を規定し、
T1(y)は正規化信号サンプル値の増加に対する非減少関数であり、
T2(y)は正規化信号サンプル値の増加に対する減少関数であり、
遷移値ytは1.3≦yt≦1.7の範囲の値を有する、請求項8〜11のいずれか1項に記載の方法。
【請求項14】
前記非線形変換を実行するプロセスにおいて、前記第1の関数T1(y)は正規化信号サンプル値の増加に対する増加関数であり、T1(y)の平均勾配の大きさはT2(y)の平均勾配の大きさよりも小さい、請求項13に記載の方法。
【請求項15】
プログラム可能な処理装置をプログラムして請求項8〜14の少なくとも1項に記載の方法を実行するように動作可能にするコンピュータープログラム命令を担持するコンピュータープログラム製品。
【図1】

【図2】
【図3a)】
【図3b)】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3a)】
【図3b)】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2011−247892(P2011−247892A)
【公開日】平成23年12月8日(2011.12.8)
【国際特許分類】
【外国語出願】
【出願番号】特願2011−119125(P2011−119125)
【出願日】平成23年5月27日(2011.5.27)
【出願人】(503163527)ミツビシ・エレクトリック・アールアンドディー・センター・ヨーロッパ・ビーヴィ (175)
【氏名又は名称原語表記】MITSUBISHI ELECTRIC R&D CENTRE EUROPE B.V.
【住所又は居所原語表記】Capronilaan 46, 1119 NS Schiphol Rijk, The Netherlands
【Fターム(参考)】
【公開日】平成23年12月8日(2011.12.8)
【国際特許分類】
【出願番号】特願2011−119125(P2011−119125)
【出願日】平成23年5月27日(2011.5.27)
【出願人】(503163527)ミツビシ・エレクトリック・アールアンドディー・センター・ヨーロッパ・ビーヴィ (175)
【氏名又は名称原語表記】MITSUBISHI ELECTRIC R&D CENTRE EUROPE B.V.
【住所又は居所原語表記】Capronilaan 46, 1119 NS Schiphol Rijk, The Netherlands
【Fターム(参考)】
[ Back to top ]