
自動車両のための一組の調節可能なペダル
自動車両のそれぞれ加速及び制動のための少なくとも2つのペダルを備える、自動車両のための一組の調節可能なペダルが記載されている。2つのペダルは、支持素子(5)上に取り付けられ、自動車両の固定フレームに対するその位置は、支持素子(5)とフレーム自体との間に設定されるクランク機構(16)によって定められる規制装置(9)によって選択的に制御される。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自動車両のための一組の調節可能なペダルに関する。
【背景技術】
【0002】
現在市場にある自動車両は、運転座席と、ステアリングホイールと、一組のペダルと、計器板とを含む。自動車両を運転するであろう人又は複数の人の物理的特性は先天的に知られないので、運転位置の程度を運転者の物理的特性に適合するよう、運転位置の様々な構成部品の位置を相互に変更可能にする、一連の調節装置を提供することが必要である。市場で入手可能な自動車両の大部分において、一連のペダル及び計器板は固定位置に配置され、ステアリングホイールは一般的に高さ調節可能であり、座席は高さ及びステアリングホイールからのその距離の双方に関して調節可能である。計器板、一組のペダル、及び、実質的に固定され且つ座席を前後に押すステアリングホイールを想定する解決策は、製造が容易且つ安価であり、よって、自動車両の圧倒的多数において用いられている。しかしながら、この解決策は、計器があらゆる座席位置において正しく見えることを可能にする計器板の幾何を提供することが不可能である限りにおいて、幾つかの欠点も提示する。
【0003】
その上、記載したばかりの解決策は、座席の十分に長い移動を得るよう長さが比較的長い運転位置の構造を必要とする。前記前提条件は、4つ又はそれ以上の座席を備える自動車両、即ち、後部座席も備える自動車両においては、十分に許容可能であるが、比較的小さな客室全長を有する二人乗りの自動車両、即ち、後部座席を備えない自動車両においては、問題であり得ることが分かっている。
【0004】
上記の問題点を解決するために、運転座席が固定され、且つ、一組のペダル及びステアリングホイールが、座席からのそれらの距離を変更するように座席に対して可動である解決策が提案された。
【0005】
具体的には、自動車両のための一組の可動なペダルを提供するために、多くの解決策が提案された。しかしながら、既知の解決策は、それれが極めて短い調節ストロークを有し、複雑であり、且つ、製造が困難である限りにおいて、様々な欠点を提示している。
【発明の開示】
【発明が解決しようとする課題】
【0006】
本発明の目的は、上記欠点がなく、製造が簡単且つ安価な自動車両のための一組の調節可能なペダルを提供することである。
【課題を解決するための手段】
【0007】
本発明によれば、自動車両のための調節可能な一組のペダルは、請求項1に請求されるように提供される。
【0008】
本発明の実施態様の非制限的な実施例を例証する添付図面を参照して、本発明を今や記載する。
【発明を実施するための最良の形態】
【0009】
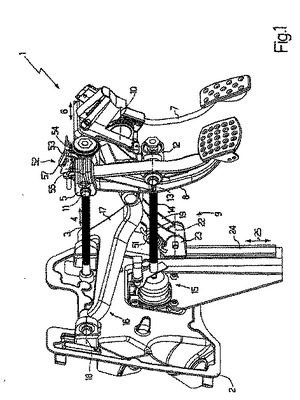
図1、2、及び、3を参照すると、全体的に1によって指し示されているものは、自動車両(図示せず)のための調節可能な一組のペダルである。
【0010】
一組のペダル1は、固定プレート2を含む。固定プレートは、自動車両(図示せず)の固定フレーム(図示せず)への一組のペダル1自体の固定を可能にし、歯付き案内ロッド3を支持する。歯付き案内ロッドは、固定プレート2から所与の方向4に突出し、長手軸3aを有し、且つ、縦断面において実質的にV字形状を有する歯部を備える。
【0011】
ロッド3は、方向4に対して実質的に横の方向6に延在するスライド5によって摺動可能に係合され、スライド5を通じて形成され且つロッド3の軸3aを共有するよう設定される中心孔5aを有し、好適例では、それぞれ自動車両(図示せず)の加速及び制動のための2つのペダル7,8を支持し、且つ、以下により詳細に例証される作動装置9の推力の作用下でロッド3自体に沿って可動である。
【0012】
変形(図示せず)によれば、スライド5は、自動車両(図示せず)のクラッチペダルをさらに支持する。
【0013】
ペダル7は、方向6と実質的に平行な支点の軸10についてのスライド5自体に対する往復動のために、スライド5上に取り付けられた、既知の種類のペダルであり、ペダル8は、それ自体の自由端部に対応する位置において、軸10と実質的に平行な支点の軸11についてのスライド5自体に対する往復動のために、スライド5に蝶番付けされている。
【0014】
その上、ペダル8は、その中間地点に対応する位置において、軸11と実質的に平行な支点の軸13についてのスリーブ12自体に対する往復動のために、スリーブ12に蝶番付けされている。
【0015】
スリーブ12は、歯付きロッド14に対して同軸に取り付けられている。歯付きロッド14は、軸3aと平行な長手軸14aを有し、且つ、縦断面で実質的に鋸歯形状を有する歯部を備える。ロッド14自体に沿って、並びに、装置9の推力の作用下で、方向4における直線移動を遂行するために、スリーブ12は、軸方向に摺動可能な方法で、ロッド14に結合され、且つ、既知の種類の制動装置15の動作を選択的に制御するよう、軸11についてのペダル8の往復動の後に引き続いて、方向4でロッド14自体上に直線移動を伝えるために、(以下により詳細に記載される様式に従って)ロッド14に接続可能である。
【0016】
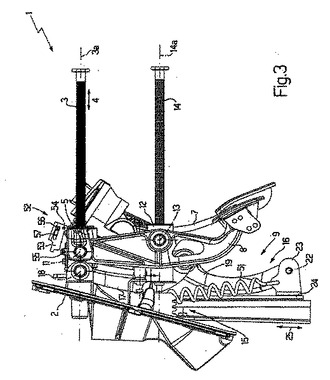
作動装置9は、クランク機構16を含み、クランク機構は、順次、方向6と実質的に平行な支点の軸18についての固定プレート2自体に対する往復動のために固定プレート2に蝶番付けされたクランク17と、軸18と平行な支点の軸20についてのクランク17自体に対する往復動のために、その中間地点に対応する位置において、クランク17の1つの自由端部に蝶番付けされ、且つ、軸20と平行な2つの軸21,22の間に延在する連接棒19とを含む。その軸22は、スライド5に対する連接棒19の回転の軸であり、軸22は、方向4及び6に対して直交する方向25に延びる直線ガイド24に摺動可能に結合されるパッド23に対する連接棒19の回転の軸である。
【0017】
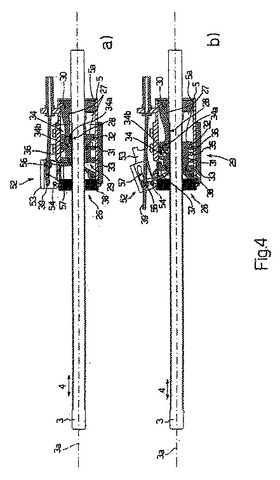
図4に例証されているものによれば、装置9は、クランプ装置26をさらに含む。クランプ装置は、ロッド3に沿うスライド5の阻害を可能にし、複数の把持アーム27(好適例では3つの把持アーム27)を含む。複数の把持アームは、孔5a内に取り付けられ、ロッド3の周りに、よって、軸3aの周りに均一に分配され、且つ、ロッド3自体に面する位置に取り付けられた歯付き部分をそれぞれ有する。
【0018】
アーム27は、部分28がロッド3自体と係合するのを可能にするよう、アーム27がそれ自体をロッド3の直径に欠けて近付く相互距離に設定するクランプ位置(図4b)と、部分28がロッド3自体から離脱するのを可能にするよう、アーム27がそれ自体をロッド3の直径を超えて近付く相互距離に設定する解放位置(図4a)との間での、軸3a自体に対して横方向の支点の軸30についての、スライド5自体に対する並びに作動装置29の推力の作用下の往復動のために、スライド5に蝶番付けされる。
【0019】
作動装置29は、機械的に作動される管状ピストン31を含む。管状ピストンは、それがロッド3の軸3aを共有するよう、孔5a内に取り付けられ、ロッド3に対して摺動可能に結合され、且つ、その独自の第一自由端部に対応する位置に、ピストン31の外表面から放射状に外向きに延びる環状フランジ32を備え、且つ、その独自の第二自由端部に対応する位置に、軸3aに対して直交するピストン31自体に固定されたカップ33を備える。
【0020】
ピストン31は、複数の軌道輪34を有する。複数の軌道輪は、軸3aの周りに均一に分配され、アーム27と同一数であり、それぞれ各アーム27によって摺動可能に係合され、且つ、軸3aと平行なフランジ32を通じて形成された各第一伸張部34aと、ピストン31を通じて形成され且つ軸3a自体に対して傾斜した各第二伸張部34bとをそれぞれ含む。
【0021】
作動装置29は、ばね35をさらに含む。ばね35は、それがロッド3の軸3aを共有するよう、孔5a内に取り付けられ、且つ、カップ33と環状素子36との間に設定される。環状素子は、ピストン31を静止位置(図4b)内に移動し、且つ、通常その中に保持するために、孔5a内に取り付けられる。静止位置において、アーム27の両自由端部は、対応する伸張部34aと係合し、部分28は、ロッド3に係合するために、対応する軌道輪34の外側にそれら自体を設定する。
【0022】
ピストン31は、軸3aに対して横方向の支点の軸38についての並びにばね35の推力に抗する往復動のために、孔5a内に蝶番付けされたレバー37の推力の作用下で、前述の静止位置から動作位置(図4a)へ可動であり、動作位置において、アーム27の両自由端部は対応する伸張部34bと係合し、部分28は、ロッド34を分離するために、対応する伸張部34aと係合する。
【0023】
レバー37は、レバー37自体を軸38について移動するよう設計されたボーデン型のケーブル39によって作動されるよう、スライド5から放射状に外向きに突出している。
【0024】
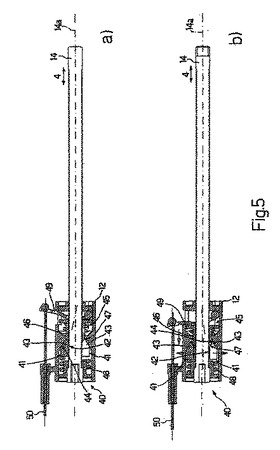
図5を参照すると、作動装置9は、クランプ装置40をさらに含む。クランプ装置40は、ロッド14に沿うスリーブ12の阻害を可能にし、複数の把持部材41(好適例では3つの部材41)を含む。複数の把持部材は、スリーブ12内に取り付けられ、且つ、ロッド14の周りに均一に分配されている。各部材41は、軸14aと平行に延び且つロッド14に面する位置に設定される歯付き面42によって半径方向に制限され、且つ、スリーブ12の内面上に形成された切頭コーンのような形状の軌道輪44と係合して設定され且つ通常全ての部材41に共通する実質的に楔形状部分43によって軸方向に制限されている。
【0025】
把持部材41は、作動装置45の推力の作用下で、面42がロッド14自体と係合するのを可能にするよう、部材41がそれ自体をロッド14の直径に欠けて近付く相互距離に設定するクランプ位置(図4b)と、面42がロッド14自体から離脱するのを可能にするよう、部材41がそれ自体をロッド14の直径を超えて近付く相互距離に設定する解放位置(図4a)との間で可動である。
【0026】
作動装置45は、ロッド14の軸14aを共有するよう、スリーブ12内に取り付けられ、ロッド14に対して摺動可能に結合され、且つ、部分43と係合して設定された切頭コーンのような形状の表面47によって軸方向に制限された、機械的に作動される環状ピストン46と、ロッド14の軸14aを共有するよう、ロッド14上に適合され、且つ、部材41自体をそれらのクランプ位置に移動し、通常、それらをクランプ位置に保持するために、並びに、ピストン46を静止位置(図5a)に移動し、通常、それを静止位置に保持するために、スリーブ12と部材41との間に設定されたばね48とを含む。
【0027】
ピストン46は、ボーデン型のケーブル50によって作動されるようスリーブ12を通じて延びるレバー49の推力の作用下で、並びに、ばね48の推力に抗して、前述の静止位置から動作位置(図5b)に可動であり、動作位置では、部材41は軌道輪44に沿ってそれらの解放位置に移動される。
【0028】
上記に示されたものと共に、以下の点がさらに指摘されなければならない。
− 自動車両(図示せず)の運転者がクランプ装置26及び40を単一操作で作動し得るよう、ケーブル50は、通常、ケーブル39に接続されている。
− クランプ装置26及び40がそれらの解放位置に移動されるとき、クランク機構16は、動作位置(図1及び2を参照)に移動され、通常、動作位置に保持され、そこでは、スライド5、故に、ペダル7,8は、クランク17とパッド23との間に設定されたばね51によって、固定プレート2から最大距離に設定される。
【0029】
最後に、作動装置9は、軸11についてペダル8をクランプするための装置52を含む。次いで、装置52は、方向6と平行な支点の軸54についての、スライド5自体に対する往復動のために、スライド5に蝶番付けされ、且つ、クランプ53が方向6自体と平行なペダル8から突出するピン55と係合するクランプ位置(図4a)と、解放位置(図1及び4b)との間で可動なクランク53を含む。クランク53は、ピン56を介して、ケーブル39によって作動される。ピンは、ケーブル39自体に固定され、方向6と平行に延び、且つ、装置26及び40をそれらの解放位置に並びにその解放位置に移動する前、装置26及び40をそれらのクランプ位置に移動した後に、装置52をそのクランプ位置に移動するよう、クランク53内に形成された溝57に沿って可動である。
【0030】
変形(図示せず)によれば、クランプ装置26は、軸18についてのクランク17の位置を選択的に制御するよう設計されたクランプ装置と置換される。
【0031】
さらなる変形(図示せず)によれば、ロッド3及び14は、2つのねじ付きロッドと置換され、2つのねじ付きロッドは、それぞれの電気モータによって或いは、代替的に、双方のねじ付きロッドに共通する単一モータによって回転するように設定され、且つ、各外ねじ付き/内ねじ付きカップリングを介して、スライド5に並びにスリーブ12に結合される。
【0032】
使用中、自動車両の運転者は、先ず、装置52をそのクランプ位置に移動し、軸11についてのペダル8の往復動を阻止するよう移動し、次に、装置26及び40をそれらの解放位置に移動するよう、ケーブル39及び50を作動する。この地点で、クランク機構16は、ばね51によって、図1及び2に例証されるその動作位置に移動され、一組のペダル1は、ペダル8の係合を介して運転者によって方向4に移動され、最終的に、ロッド3に沿った所望位置に達するや否や、ケーブル39及び50は、先ず、装置26及び40がそれらのクランプ位置に設定され、故に、装置52がその解放位置に設定されるのを可能にするために、運転者自身によって解放される。
【0033】
一組のペダル1は、スライド5、故に、ペダル7及びペダル8のそれぞれの支点の軸10,11が、方向4と平行な直線経路に沿って移動されるという事実、並びに、クランク機構16が、簡単且つ安価な方法で、方向4におけるスライド5の比較的広範な移動を可能にするという事実に主として由来する多くの利点を提示する。
【図面の簡単な説明】
【0034】
【図1】本発明に従った調節可能な組のペダルの好適実施態様を概略的に示す斜視図である。
【図2】異なる動作位置において例証された図1の調節可能な組のペダルを示す側面図である。
【図3】異なる動作位置において例証された図1の調節可能な組のペダルを示す側面図である。
【図4】aは、異なる動作位置において例証された図1の第一の詳細を示す縦断面図であり、bは、異なる動作位置において例証された図1の第一の詳細を示す縦断面図である。
【図5】aは、異なる動作位置において例証された図1の第二の詳細を示す縦断面図であり、bは、異なる動作位置において例証された図1の第二の詳細を示す縦断面図である。
【技術分野】
【0001】
本発明は、自動車両のための一組の調節可能なペダルに関する。
【背景技術】
【0002】
現在市場にある自動車両は、運転座席と、ステアリングホイールと、一組のペダルと、計器板とを含む。自動車両を運転するであろう人又は複数の人の物理的特性は先天的に知られないので、運転位置の程度を運転者の物理的特性に適合するよう、運転位置の様々な構成部品の位置を相互に変更可能にする、一連の調節装置を提供することが必要である。市場で入手可能な自動車両の大部分において、一連のペダル及び計器板は固定位置に配置され、ステアリングホイールは一般的に高さ調節可能であり、座席は高さ及びステアリングホイールからのその距離の双方に関して調節可能である。計器板、一組のペダル、及び、実質的に固定され且つ座席を前後に押すステアリングホイールを想定する解決策は、製造が容易且つ安価であり、よって、自動車両の圧倒的多数において用いられている。しかしながら、この解決策は、計器があらゆる座席位置において正しく見えることを可能にする計器板の幾何を提供することが不可能である限りにおいて、幾つかの欠点も提示する。
【0003】
その上、記載したばかりの解決策は、座席の十分に長い移動を得るよう長さが比較的長い運転位置の構造を必要とする。前記前提条件は、4つ又はそれ以上の座席を備える自動車両、即ち、後部座席も備える自動車両においては、十分に許容可能であるが、比較的小さな客室全長を有する二人乗りの自動車両、即ち、後部座席を備えない自動車両においては、問題であり得ることが分かっている。
【0004】
上記の問題点を解決するために、運転座席が固定され、且つ、一組のペダル及びステアリングホイールが、座席からのそれらの距離を変更するように座席に対して可動である解決策が提案された。
【0005】
具体的には、自動車両のための一組の可動なペダルを提供するために、多くの解決策が提案された。しかしながら、既知の解決策は、それれが極めて短い調節ストロークを有し、複雑であり、且つ、製造が困難である限りにおいて、様々な欠点を提示している。
【発明の開示】
【発明が解決しようとする課題】
【0006】
本発明の目的は、上記欠点がなく、製造が簡単且つ安価な自動車両のための一組の調節可能なペダルを提供することである。
【課題を解決するための手段】
【0007】
本発明によれば、自動車両のための調節可能な一組のペダルは、請求項1に請求されるように提供される。
【0008】
本発明の実施態様の非制限的な実施例を例証する添付図面を参照して、本発明を今や記載する。
【発明を実施するための最良の形態】
【0009】
図1、2、及び、3を参照すると、全体的に1によって指し示されているものは、自動車両(図示せず)のための調節可能な一組のペダルである。
【0010】
一組のペダル1は、固定プレート2を含む。固定プレートは、自動車両(図示せず)の固定フレーム(図示せず)への一組のペダル1自体の固定を可能にし、歯付き案内ロッド3を支持する。歯付き案内ロッドは、固定プレート2から所与の方向4に突出し、長手軸3aを有し、且つ、縦断面において実質的にV字形状を有する歯部を備える。
【0011】
ロッド3は、方向4に対して実質的に横の方向6に延在するスライド5によって摺動可能に係合され、スライド5を通じて形成され且つロッド3の軸3aを共有するよう設定される中心孔5aを有し、好適例では、それぞれ自動車両(図示せず)の加速及び制動のための2つのペダル7,8を支持し、且つ、以下により詳細に例証される作動装置9の推力の作用下でロッド3自体に沿って可動である。
【0012】
変形(図示せず)によれば、スライド5は、自動車両(図示せず)のクラッチペダルをさらに支持する。
【0013】
ペダル7は、方向6と実質的に平行な支点の軸10についてのスライド5自体に対する往復動のために、スライド5上に取り付けられた、既知の種類のペダルであり、ペダル8は、それ自体の自由端部に対応する位置において、軸10と実質的に平行な支点の軸11についてのスライド5自体に対する往復動のために、スライド5に蝶番付けされている。
【0014】
その上、ペダル8は、その中間地点に対応する位置において、軸11と実質的に平行な支点の軸13についてのスリーブ12自体に対する往復動のために、スリーブ12に蝶番付けされている。
【0015】
スリーブ12は、歯付きロッド14に対して同軸に取り付けられている。歯付きロッド14は、軸3aと平行な長手軸14aを有し、且つ、縦断面で実質的に鋸歯形状を有する歯部を備える。ロッド14自体に沿って、並びに、装置9の推力の作用下で、方向4における直線移動を遂行するために、スリーブ12は、軸方向に摺動可能な方法で、ロッド14に結合され、且つ、既知の種類の制動装置15の動作を選択的に制御するよう、軸11についてのペダル8の往復動の後に引き続いて、方向4でロッド14自体上に直線移動を伝えるために、(以下により詳細に記載される様式に従って)ロッド14に接続可能である。
【0016】
作動装置9は、クランク機構16を含み、クランク機構は、順次、方向6と実質的に平行な支点の軸18についての固定プレート2自体に対する往復動のために固定プレート2に蝶番付けされたクランク17と、軸18と平行な支点の軸20についてのクランク17自体に対する往復動のために、その中間地点に対応する位置において、クランク17の1つの自由端部に蝶番付けされ、且つ、軸20と平行な2つの軸21,22の間に延在する連接棒19とを含む。その軸22は、スライド5に対する連接棒19の回転の軸であり、軸22は、方向4及び6に対して直交する方向25に延びる直線ガイド24に摺動可能に結合されるパッド23に対する連接棒19の回転の軸である。
【0017】
図4に例証されているものによれば、装置9は、クランプ装置26をさらに含む。クランプ装置は、ロッド3に沿うスライド5の阻害を可能にし、複数の把持アーム27(好適例では3つの把持アーム27)を含む。複数の把持アームは、孔5a内に取り付けられ、ロッド3の周りに、よって、軸3aの周りに均一に分配され、且つ、ロッド3自体に面する位置に取り付けられた歯付き部分をそれぞれ有する。
【0018】
アーム27は、部分28がロッド3自体と係合するのを可能にするよう、アーム27がそれ自体をロッド3の直径に欠けて近付く相互距離に設定するクランプ位置(図4b)と、部分28がロッド3自体から離脱するのを可能にするよう、アーム27がそれ自体をロッド3の直径を超えて近付く相互距離に設定する解放位置(図4a)との間での、軸3a自体に対して横方向の支点の軸30についての、スライド5自体に対する並びに作動装置29の推力の作用下の往復動のために、スライド5に蝶番付けされる。
【0019】
作動装置29は、機械的に作動される管状ピストン31を含む。管状ピストンは、それがロッド3の軸3aを共有するよう、孔5a内に取り付けられ、ロッド3に対して摺動可能に結合され、且つ、その独自の第一自由端部に対応する位置に、ピストン31の外表面から放射状に外向きに延びる環状フランジ32を備え、且つ、その独自の第二自由端部に対応する位置に、軸3aに対して直交するピストン31自体に固定されたカップ33を備える。
【0020】
ピストン31は、複数の軌道輪34を有する。複数の軌道輪は、軸3aの周りに均一に分配され、アーム27と同一数であり、それぞれ各アーム27によって摺動可能に係合され、且つ、軸3aと平行なフランジ32を通じて形成された各第一伸張部34aと、ピストン31を通じて形成され且つ軸3a自体に対して傾斜した各第二伸張部34bとをそれぞれ含む。
【0021】
作動装置29は、ばね35をさらに含む。ばね35は、それがロッド3の軸3aを共有するよう、孔5a内に取り付けられ、且つ、カップ33と環状素子36との間に設定される。環状素子は、ピストン31を静止位置(図4b)内に移動し、且つ、通常その中に保持するために、孔5a内に取り付けられる。静止位置において、アーム27の両自由端部は、対応する伸張部34aと係合し、部分28は、ロッド3に係合するために、対応する軌道輪34の外側にそれら自体を設定する。
【0022】
ピストン31は、軸3aに対して横方向の支点の軸38についての並びにばね35の推力に抗する往復動のために、孔5a内に蝶番付けされたレバー37の推力の作用下で、前述の静止位置から動作位置(図4a)へ可動であり、動作位置において、アーム27の両自由端部は対応する伸張部34bと係合し、部分28は、ロッド34を分離するために、対応する伸張部34aと係合する。
【0023】
レバー37は、レバー37自体を軸38について移動するよう設計されたボーデン型のケーブル39によって作動されるよう、スライド5から放射状に外向きに突出している。
【0024】
図5を参照すると、作動装置9は、クランプ装置40をさらに含む。クランプ装置40は、ロッド14に沿うスリーブ12の阻害を可能にし、複数の把持部材41(好適例では3つの部材41)を含む。複数の把持部材は、スリーブ12内に取り付けられ、且つ、ロッド14の周りに均一に分配されている。各部材41は、軸14aと平行に延び且つロッド14に面する位置に設定される歯付き面42によって半径方向に制限され、且つ、スリーブ12の内面上に形成された切頭コーンのような形状の軌道輪44と係合して設定され且つ通常全ての部材41に共通する実質的に楔形状部分43によって軸方向に制限されている。
【0025】
把持部材41は、作動装置45の推力の作用下で、面42がロッド14自体と係合するのを可能にするよう、部材41がそれ自体をロッド14の直径に欠けて近付く相互距離に設定するクランプ位置(図4b)と、面42がロッド14自体から離脱するのを可能にするよう、部材41がそれ自体をロッド14の直径を超えて近付く相互距離に設定する解放位置(図4a)との間で可動である。
【0026】
作動装置45は、ロッド14の軸14aを共有するよう、スリーブ12内に取り付けられ、ロッド14に対して摺動可能に結合され、且つ、部分43と係合して設定された切頭コーンのような形状の表面47によって軸方向に制限された、機械的に作動される環状ピストン46と、ロッド14の軸14aを共有するよう、ロッド14上に適合され、且つ、部材41自体をそれらのクランプ位置に移動し、通常、それらをクランプ位置に保持するために、並びに、ピストン46を静止位置(図5a)に移動し、通常、それを静止位置に保持するために、スリーブ12と部材41との間に設定されたばね48とを含む。
【0027】
ピストン46は、ボーデン型のケーブル50によって作動されるようスリーブ12を通じて延びるレバー49の推力の作用下で、並びに、ばね48の推力に抗して、前述の静止位置から動作位置(図5b)に可動であり、動作位置では、部材41は軌道輪44に沿ってそれらの解放位置に移動される。
【0028】
上記に示されたものと共に、以下の点がさらに指摘されなければならない。
− 自動車両(図示せず)の運転者がクランプ装置26及び40を単一操作で作動し得るよう、ケーブル50は、通常、ケーブル39に接続されている。
− クランプ装置26及び40がそれらの解放位置に移動されるとき、クランク機構16は、動作位置(図1及び2を参照)に移動され、通常、動作位置に保持され、そこでは、スライド5、故に、ペダル7,8は、クランク17とパッド23との間に設定されたばね51によって、固定プレート2から最大距離に設定される。
【0029】
最後に、作動装置9は、軸11についてペダル8をクランプするための装置52を含む。次いで、装置52は、方向6と平行な支点の軸54についての、スライド5自体に対する往復動のために、スライド5に蝶番付けされ、且つ、クランプ53が方向6自体と平行なペダル8から突出するピン55と係合するクランプ位置(図4a)と、解放位置(図1及び4b)との間で可動なクランク53を含む。クランク53は、ピン56を介して、ケーブル39によって作動される。ピンは、ケーブル39自体に固定され、方向6と平行に延び、且つ、装置26及び40をそれらの解放位置に並びにその解放位置に移動する前、装置26及び40をそれらのクランプ位置に移動した後に、装置52をそのクランプ位置に移動するよう、クランク53内に形成された溝57に沿って可動である。
【0030】
変形(図示せず)によれば、クランプ装置26は、軸18についてのクランク17の位置を選択的に制御するよう設計されたクランプ装置と置換される。
【0031】
さらなる変形(図示せず)によれば、ロッド3及び14は、2つのねじ付きロッドと置換され、2つのねじ付きロッドは、それぞれの電気モータによって或いは、代替的に、双方のねじ付きロッドに共通する単一モータによって回転するように設定され、且つ、各外ねじ付き/内ねじ付きカップリングを介して、スライド5に並びにスリーブ12に結合される。
【0032】
使用中、自動車両の運転者は、先ず、装置52をそのクランプ位置に移動し、軸11についてのペダル8の往復動を阻止するよう移動し、次に、装置26及び40をそれらの解放位置に移動するよう、ケーブル39及び50を作動する。この地点で、クランク機構16は、ばね51によって、図1及び2に例証されるその動作位置に移動され、一組のペダル1は、ペダル8の係合を介して運転者によって方向4に移動され、最終的に、ロッド3に沿った所望位置に達するや否や、ケーブル39及び50は、先ず、装置26及び40がそれらのクランプ位置に設定され、故に、装置52がその解放位置に設定されるのを可能にするために、運転者自身によって解放される。
【0033】
一組のペダル1は、スライド5、故に、ペダル7及びペダル8のそれぞれの支点の軸10,11が、方向4と平行な直線経路に沿って移動されるという事実、並びに、クランク機構16が、簡単且つ安価な方法で、方向4におけるスライド5の比較的広範な移動を可能にするという事実に主として由来する多くの利点を提示する。
【図面の簡単な説明】
【0034】
【図1】本発明に従った調節可能な組のペダルの好適実施態様を概略的に示す斜視図である。
【図2】異なる動作位置において例証された図1の調節可能な組のペダルを示す側面図である。
【図3】異なる動作位置において例証された図1の調節可能な組のペダルを示す側面図である。
【図4】aは、異なる動作位置において例証された図1の第一の詳細を示す縦断面図であり、bは、異なる動作位置において例証された図1の第一の詳細を示す縦断面図である。
【図5】aは、異なる動作位置において例証された図1の第二の詳細を示す縦断面図であり、bは、異なる動作位置において例証された図1の第二の詳細を示す縦断面図である。
【特許請求の範囲】
【請求項1】
自動車両の制動のための第一ペダルと、
前記自動車両自体の加速のための第二ペダルと、
前記第一ペダル及び前記第二ペダルの支持手段と、
前記自動車両のフレームに対する前記支持手段の位置を選択的に制御するための調節装置とを含む、
自動車両の調節可能な一組のペダルであって、
前記調節装置は、前記支持手段と前記フレームとの間に取り付けられたクランク機構を含むことを特徴とする、
調節可能な一組のペダル。
【請求項2】
前記調節装置は、所与の第一方向に延びる第一ガイドをさらに含み、前記支持手段は、前記第一ガイドに沿って可動である、請求項1に記載の調節可能な一組のペダル。
【請求項3】
前記第一ガイドは、第一長手軸について回転し得るよう取り付けられた第一ねじを含み、前記支持手段は、第一外ねじ付き/内ねじ付きカップリングを介して前記第一ねじ自体に結合される、請求項2に記載の調節可能な一組のペダル。
【請求項4】
前記調節装置は、前記第一方向に対して実質的に横方向の第二方向に延びる第二ガイドと、前記クランク機構の推力の作用下で前記第二ガイドに沿って摺動し得るよう取り付けられたスライドとをさらに含む、請求項2又は3に記載の調節可能な一組のペダル。
【請求項5】
前記クランク機構は、前記支持手段と前記スライドとの間に取り付けられた連接棒と、前記フレームと前記連接棒自体との間に取り付けられたクランクとを含む、請求項4に記載の調節可能な一組のペダル。
【請求項6】
前記支持手段は、前記クランク機構の推力の作用下で、第一端部位置と第二端部位置との間で可動であり、推力手段が、前記支持手段を、前記第一端部位置及び前記第二端部位置の一方に移動し、通常、それらを前記第一端部位置及び前記第二端部位置の一方に保持するために設けられている、請求項4又は5に記載の調節可能な一組のペダル。
【請求項7】
前記推力手段は、前記スライドと前記クランク機構との間に設定された弾性推力手段である、請求項6に記載の調節可能な一組のペダル。
【請求項8】
前記調節装置は、前記第一ガイドに沿って前記支持手段を阻害するための第一クランプ手段と、該第一クランプ手段を前記第一ガイドに沿う前記支持手段の第一クランプ位置と第一解放位置との間で作動するための第一作動装置とをさらに含む、請求項2乃至7のうちいずれか1項に記載の調節可能な一組のペダル。
【請求項9】
前記第一クランプ手段は、前記支持手段によって支持され、前記第一ガイドの周りに分配され、且つ、前記第一ガイド自体から離れて並びに前記第一ガイド自体に向かって可動な複数の第一クランプ部材を含み、前記第一作動装置は、前記第一クランプ部材を前記第一クランプ位置から前記第一解放位置に移動するための第一作動手段と、前記第一クランプ手段を前記第一クランプ位置から前記第一解放位置に移動するための第二作動手段とを含む、請求項8に記載の調節可能な一組のペダル。
【請求項10】
前記第一方向と実質的に平行で、前記第一ペダルを通じて摺動可能に係合され、且つ、前記自動車両の制動装置を作動するために前記第一ペダル自体と接続可能な制御ロッドと、前記制御ロッドに沿う前記第一ペダルを阻害するために設けられた第二クランプ手段と、前記第二クランプ手段を前記制御ロッドに沿った前記第一ペダルの第二クランプ位置と第二解放位置との間で作動するよう設計された第二作動装置とをさらに含む、請求項8又は9に記載の調節可能な一組のペダル。
【請求項11】
前記第二クランプ手段は、前記第一ペダルによって支持され、前記制御ロッドの周りに分配され、且つ、前記制御ロッド自体から離れて並びに前記制御ロッド自体に向かって可動な複数の第二クランプ部材を含み、前記第二作動装置は、前記第二クランプ部材を前記第二クランプ位置から前記第二解放位置に移動するための第三作動手段と、前記第二クランプ部材を前記第二解放位置から前記第二クランプ位置に移動するための第四作動手段を含む、請求項10に記載の調整可能な一組のペダル。
【請求項12】
前記第一ペダルは、支点の所与の軸についての往復動のために、前記支持手段上に回転可能に取り付けられ、前記支点の軸について前記第一ペダルを角度的に阻害するために、第三クランプ手段が設けられ、第三作動装置が、前記第三クランプ手段を前記支点の軸についての前記第一ペダルの第三クランプ位置と第三解放位置との間で作動するよう設計された、請求項10又は11に記載の調整可能な一組のペダル。
【請求項13】
前記第一作動装置、前記第二作動装置、及び、前記第三作動装置は、前記第一クランプ手段及び前記第二クランプ手段がそれらの対応する解放位置に移動されるときに、前記第三クランプ手段を前記対応するクランプ位置に移動するために、並びに、前記第一クランプ手段及び前記第二クランプ手段がそれらの対応するクランプ位置に移動されるときに、前記対応する解放位置に移動するために一体的に接続される、請求項12に記載の調整可能な一組のペダル。
【請求項14】
前記第一方向は、実質的に直線方向である、請求項2乃至13のうちいずれか1項に記載の調整可能な一組のペダル。
【請求項15】
前記自動車両の制動装置を作動するために設計された制御ロッドをさらに含み、第二長手軸について回転し得るよう取り付けられた第二ねじを含み、前記第一ペダルは、第二外ねじ付き/内ねじ付きカップリングを介して、前記第二ねじに結合される、請求項1乃至9のうちいずれか1項に記載の調整可能な一組のペダル。
【請求項1】
自動車両の制動のための第一ペダルと、
前記自動車両自体の加速のための第二ペダルと、
前記第一ペダル及び前記第二ペダルの支持手段と、
前記自動車両のフレームに対する前記支持手段の位置を選択的に制御するための調節装置とを含む、
自動車両の調節可能な一組のペダルであって、
前記調節装置は、前記支持手段と前記フレームとの間に取り付けられたクランク機構を含むことを特徴とする、
調節可能な一組のペダル。
【請求項2】
前記調節装置は、所与の第一方向に延びる第一ガイドをさらに含み、前記支持手段は、前記第一ガイドに沿って可動である、請求項1に記載の調節可能な一組のペダル。
【請求項3】
前記第一ガイドは、第一長手軸について回転し得るよう取り付けられた第一ねじを含み、前記支持手段は、第一外ねじ付き/内ねじ付きカップリングを介して前記第一ねじ自体に結合される、請求項2に記載の調節可能な一組のペダル。
【請求項4】
前記調節装置は、前記第一方向に対して実質的に横方向の第二方向に延びる第二ガイドと、前記クランク機構の推力の作用下で前記第二ガイドに沿って摺動し得るよう取り付けられたスライドとをさらに含む、請求項2又は3に記載の調節可能な一組のペダル。
【請求項5】
前記クランク機構は、前記支持手段と前記スライドとの間に取り付けられた連接棒と、前記フレームと前記連接棒自体との間に取り付けられたクランクとを含む、請求項4に記載の調節可能な一組のペダル。
【請求項6】
前記支持手段は、前記クランク機構の推力の作用下で、第一端部位置と第二端部位置との間で可動であり、推力手段が、前記支持手段を、前記第一端部位置及び前記第二端部位置の一方に移動し、通常、それらを前記第一端部位置及び前記第二端部位置の一方に保持するために設けられている、請求項4又は5に記載の調節可能な一組のペダル。
【請求項7】
前記推力手段は、前記スライドと前記クランク機構との間に設定された弾性推力手段である、請求項6に記載の調節可能な一組のペダル。
【請求項8】
前記調節装置は、前記第一ガイドに沿って前記支持手段を阻害するための第一クランプ手段と、該第一クランプ手段を前記第一ガイドに沿う前記支持手段の第一クランプ位置と第一解放位置との間で作動するための第一作動装置とをさらに含む、請求項2乃至7のうちいずれか1項に記載の調節可能な一組のペダル。
【請求項9】
前記第一クランプ手段は、前記支持手段によって支持され、前記第一ガイドの周りに分配され、且つ、前記第一ガイド自体から離れて並びに前記第一ガイド自体に向かって可動な複数の第一クランプ部材を含み、前記第一作動装置は、前記第一クランプ部材を前記第一クランプ位置から前記第一解放位置に移動するための第一作動手段と、前記第一クランプ手段を前記第一クランプ位置から前記第一解放位置に移動するための第二作動手段とを含む、請求項8に記載の調節可能な一組のペダル。
【請求項10】
前記第一方向と実質的に平行で、前記第一ペダルを通じて摺動可能に係合され、且つ、前記自動車両の制動装置を作動するために前記第一ペダル自体と接続可能な制御ロッドと、前記制御ロッドに沿う前記第一ペダルを阻害するために設けられた第二クランプ手段と、前記第二クランプ手段を前記制御ロッドに沿った前記第一ペダルの第二クランプ位置と第二解放位置との間で作動するよう設計された第二作動装置とをさらに含む、請求項8又は9に記載の調節可能な一組のペダル。
【請求項11】
前記第二クランプ手段は、前記第一ペダルによって支持され、前記制御ロッドの周りに分配され、且つ、前記制御ロッド自体から離れて並びに前記制御ロッド自体に向かって可動な複数の第二クランプ部材を含み、前記第二作動装置は、前記第二クランプ部材を前記第二クランプ位置から前記第二解放位置に移動するための第三作動手段と、前記第二クランプ部材を前記第二解放位置から前記第二クランプ位置に移動するための第四作動手段を含む、請求項10に記載の調整可能な一組のペダル。
【請求項12】
前記第一ペダルは、支点の所与の軸についての往復動のために、前記支持手段上に回転可能に取り付けられ、前記支点の軸について前記第一ペダルを角度的に阻害するために、第三クランプ手段が設けられ、第三作動装置が、前記第三クランプ手段を前記支点の軸についての前記第一ペダルの第三クランプ位置と第三解放位置との間で作動するよう設計された、請求項10又は11に記載の調整可能な一組のペダル。
【請求項13】
前記第一作動装置、前記第二作動装置、及び、前記第三作動装置は、前記第一クランプ手段及び前記第二クランプ手段がそれらの対応する解放位置に移動されるときに、前記第三クランプ手段を前記対応するクランプ位置に移動するために、並びに、前記第一クランプ手段及び前記第二クランプ手段がそれらの対応するクランプ位置に移動されるときに、前記対応する解放位置に移動するために一体的に接続される、請求項12に記載の調整可能な一組のペダル。
【請求項14】
前記第一方向は、実質的に直線方向である、請求項2乃至13のうちいずれか1項に記載の調整可能な一組のペダル。
【請求項15】
前記自動車両の制動装置を作動するために設計された制御ロッドをさらに含み、第二長手軸について回転し得るよう取り付けられた第二ねじを含み、前記第一ペダルは、第二外ねじ付き/内ねじ付きカップリングを介して、前記第二ねじに結合される、請求項1乃至9のうちいずれか1項に記載の調整可能な一組のペダル。
【図1】

【図2】

【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公表番号】特表2007−514604(P2007−514604A)
【公表日】平成19年6月7日(2007.6.7)
【国際特許分類】
【出願番号】特願2006−544596(P2006−544596)
【出願日】平成16年12月15日(2004.12.15)
【国際出願番号】PCT/IB2004/004195
【国際公開番号】WO2005/061292
【国際公開日】平成17年7月7日(2005.7.7)
【出願人】(591046560)フェラーリ ソシエタ ペル アチオニ (10)
【氏名又は名称原語表記】FERRARI SOCIETA PER AZIONI
【Fターム(参考)】
【公表日】平成19年6月7日(2007.6.7)
【国際特許分類】
【出願日】平成16年12月15日(2004.12.15)
【国際出願番号】PCT/IB2004/004195
【国際公開番号】WO2005/061292
【国際公開日】平成17年7月7日(2005.7.7)
【出願人】(591046560)フェラーリ ソシエタ ペル アチオニ (10)
【氏名又は名称原語表記】FERRARI SOCIETA PER AZIONI
【Fターム(参考)】
[ Back to top ]