
自動車特に自動二輪車の安定化方法
本発明は、実際縦揺れ角(ピッチ角)が決定され且つ限界縦揺れ角に制限される、自動車の安定化方法に関するものである。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自動車特に自動二輪車の安定化方法に関するものである。
【背景技術】
【0002】
独国特許出願公開第10235378号明細書から、ヨーレート・センサにより自動車の横方向傾斜が測定され且つブレーキ制御が検出された横方向傾斜の関数として行われる、オートバイにおけるブレーキ制御方法が既知である。これにより、カーブ走行におけるオートバイの横滑りないしは横への滑り移動が阻止されるべきである。
【0003】
独国特許出願公開第102004060292号明細書から、少なくとも2つの回転角速度センサにより2つの異なる軸線周りのオートバイの回転角速度が決定され且つこれらの回転角速度から自動車の横揺れ角(ロール角)並びに場合により縦揺れ角(ピッチ角)もまた決定される、オートバイのための傾斜角決定方法が既知である。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】独国特許出願公開第10235378号明細書
【特許文献2】独国特許出願公開第102004060292号明細書
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明の課題は、簡単な手段により自動車における走行安全性を改善することである。
【課題を解決するための手段】
【0006】
この課題は、本発明により、請求項1の特徴により解決される。従属請求項は目的に適った変更態様を与える。
【0007】
本発明による方法は、加速過程の間における自動車特に例えばオートバイのような自動二輪車の安定化に関するものである。制御不能な走行状況を阻止するために、本発明により、自動車の実際縦揺れ角(ピッチ角)が決定され、この場合、実際縦揺れ角が限界縦揺れ角を超えないような手段がとられる。このために、自動車内において、自動車縦方向加速度が低減または制限されて限界縦揺れ角が超えられないように操作要素が操作される。
【0008】
限界縦揺れ角への制限は、それを介して縦方向加速度が調節可能な自動車の装置への係合により行われる。この装置は、例えば後車輪を制動するための自動車のブレーキ装置である。例えば自動車の内燃機関における燃料噴射の制限ないしはそれに対応する空気質量の制限による機関トルクの絞り即ち駆動機関の調節もまた考慮される。自動車縦方向加速度を低下させるためのこれらの手段は交互に作動されても同時に作動されてもよい。実行されるべき手段は、他の状態変数または運転変数例えば縦方向加速度の絶対高さまたは縦方向加速度の上昇の関数であってもよく、この場合、縦揺れ角の制限をきわめて急速に実行するために、ブレーキ係合およびそれに続く機関トルクの絞りが行われることが好ましく、他方で、縦揺れ角限界値へ徐々に近づけるときには機関トルクの絞りだけで十分である。
【0009】
限界縦揺れ角は、それが超えられてはならない限界値ないしはしきい値を示す。この場合、例えば超えられてはならない最大値に制限することにより、設定値は固定値として考慮される。さらに、限界縦揺れ角を、実際走行状況の関数として、特に実際の走行状態変数ないしは運転変数の関数として可変に決定することもまた可能である。即ち、例えば、横方向の動的状態変数の大きな値においてないしは横方向の動的状態変数の上昇においては限界縦揺れ角が小さい値にセットないしは低下されるように、限界縦揺れ角を横方向の動的状態変数の関数として決定することが目的に適っている。したがって、例えば限界縦揺れ角が値0に低下され、これにより、前車輪が路面接触を有し且つコーナリング・フォースを伝達可能であることにより、例えばカーブ走行において自動車の安定性が保持され続けることが保証されている。横方向の状態変数として、例えば自動車の横揺れ角(ロール角)、横方向加速度および/またはヨーレートが考慮される。状態変数は、限界縦揺れ角の決定において個別に考慮されても同時に考慮されてもよい。
【0010】
目的に適った他の一実施形態により、限界縦揺れ角の決定においてないしは実際縦揺れ角の制限過程において考慮される状態変数の妥当化が実行されるように設計されている。妥当化において、一方で、特定の走行状況において測定された状態変数が妥当性に関して検査されてもよい。即ち、例えばアイドリングにおける直進走行において、即ち機関トルク要求が存在しないとき、自動車は直線方向に向けられ且つ垂直状態に存在するので、横揺れ角並びに縦方向加速度の測定値はそれぞれ値0またはほぼ値0をとるはずである。さらに、前車輪および後車輪における車輪回転速度は少なくともほぼ同じ大きさであるはずである。
【0011】
他方で、実際縦揺れ角を2つの異なる方法で決定することもまた可能であり、これにより、測定エラーに対する信頼性が向上される。例えば、好ましい実施形態により、縦揺れ角が、測定された縦揺れ角速度(ピッチレート)の積分により決定される。しかしながら、妥当化のために、さらに、比較縦揺れ角が自動車の他の状態変数から決定されてもよい。比較縦揺れ角は、例えば、自動車の縦方向加速度から車両形状を考慮して決定される。この場合、例えば自動車の車輪速度のような他の測定変数が考慮されてもよい。
【0012】
実際縦揺れ角および比較縦揺れ角の間に偏差がある場合、安全性の理由から、より大きいほうの縦揺れ角値が考慮され且つ自動車の装置への係合の基礎とされることが好ましい。それに基づいて、自動車の縦方向加速度は、より小さいほうの縦揺れ角が基礎とされた場合よりもより強く低下される。
【0013】
本方法を実行するために必要な測定値は、例えばドメイン・コントロール・ユニット(Domain Control Unit)内に含まれている例えば6D測定技術を介して決定される。基本的に、必要な慣性信号として、それから積分により縦揺れ角が決定可能な縦揺れ角速度のみが、並びに場合により縦方向加速度のみが必要となるにすぎない。例えば車輪速度のような他の測定信号は、車両内において実行されるアンチロック・システムから得ることが可能である。
【0014】
他の利点および目的に適った実施形態が、他の請求項、図面の説明および前車輪高さを制御するためのブロック回路図を示す図面から得られる。
【図面の簡単な説明】
【0015】
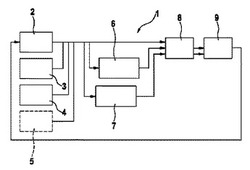
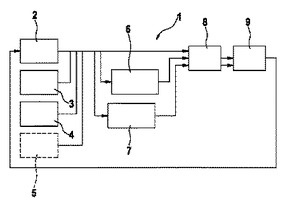
【図1】図1は、本発明による自動車特に自動二輪車の前車輪高さを制御するためのブロック回路図を示す。
【発明を実施するための形態】
【0016】
ブロック回路図1からわかるように、前車輪高さを制御するために、はじめに、第1のブロック2において、例えばオートバイのような自動二輪車の実際縦揺れ角θが決定される。縦揺れ角θは、オートバイが車両前進方向に対して直交する横方向軸線周りに持ち上げられる角度を表わし、この場合、縦揺れ角=0は前車輪が走行路面に接触していることを意味し、縦揺れ角>0は前車輪が走行路面から持ち上がっていることを意味する。
【0017】
縦揺れ角θは、例えば、縦揺れ角速度θ′を測定し且つそれに続いて縦揺れ角速度を積分することにより決定される。それに続くステップ8において、縦揺れ角の目標値θdへの制御が行われ、このことは、次のステップ9において、オートバイ内の装置の操作により行われる。装置として特にブレーキ装置が考慮され、および/または機関トルクを絞るために機関管理への係合が考慮される。このようにして、実際縦揺れ角θの、縦揺れ角に対する最大値を示す限界縦揺れ角θdへの制限が達成される。
【0018】
基本的に、縦揺れ角を制限するために他の状態変数が考慮されてもよく、このことがブロック3、4および5に記号化されている。即ち、ブロック3によりさらにオートバイの縦方向加速度axが、ブロック4により前車輪および後車輪における車輪回転速度ωが、並びにブロック5により横揺れ角速度(ロールレート)ないしは横揺れ角ψが考慮されることが目的に適っている。
【0019】
これらの他の状態変数の考慮は、特に、装置内の状態変数の妥当化を示す他のブロック6を介して、および縦揺れ角を制限するためにブレーキ装置ないしは機関管理への係合が実行されるように満たされていなければならない条件を示す他のブロック7を介して行われる。
【0020】
ブロック6による妥当化は、比較縦揺れ角θcがオートバイの他の状態変数から決定されるように実行されてもよく、この場合、比較縦揺れ角θcおよび実際縦揺れ角θの間の比較が実行される。比較縦揺れ角θcを決定するために使用される他の状態変数として、オートバイの縦方向加速度axがオートバイの形状を考慮した上で考慮され、並びに場合により車輪速度ωもまた考慮される。
【0021】
実際縦揺れ角θおよび比較縦揺れ角θcの間の比較が縦揺れ角値の間に偏差が存在することを与えた場合、安全性の理由から、より大きな縦揺れ角値が選択され且つブロック8による次の制御の基礎とされてもよい。
【0022】
ブロック7による許容条件において、限界縦揺れ角θdは車両内の他の状態変数の関数として決定される。この場合、特に横方向の動的状態変数、例えば横揺れ角ψ、場合により横方向加速度ayまたはヨーレートΨ′もまた考慮され、これにより、車輪にコーナリング・フォースが形成されなければならない走行状況において、前車輪と走行路面との間の接触もまた存在することが保証可能である。この場合、限界縦揺れ角θdは値0にセットされる。このような走行状況とは、例えば比較的大きな横揺れ角ψおよび大きな横方向加速度ayを有するカーブ走行である。
【0023】
限界縦揺れ角θdは、さらに、縦方向の動的状態変数の関数として決定されてもよい。例えば、比較的高い速度においては、安全性の理由から、より小さい限界縦揺れ角θdのみを許容することが目的に適っている。
【0024】
ブロック7において決定された限界縦揺れ角θdに対する値は、制御を記号化したブロック8内に入り且つそこで制御の基礎とされる。
【符号の説明】
【0025】
1 ブロック回路図
2 θの考慮
3 axの考慮
4 ωの考慮
5 横揺れ角速度ないしはψの考慮
6 妥当化
7 θdの決定
8 θdへの制御
9 装置の操作
【技術分野】
【0001】
本発明は、自動車特に自動二輪車の安定化方法に関するものである。
【背景技術】
【0002】
独国特許出願公開第10235378号明細書から、ヨーレート・センサにより自動車の横方向傾斜が測定され且つブレーキ制御が検出された横方向傾斜の関数として行われる、オートバイにおけるブレーキ制御方法が既知である。これにより、カーブ走行におけるオートバイの横滑りないしは横への滑り移動が阻止されるべきである。
【0003】
独国特許出願公開第102004060292号明細書から、少なくとも2つの回転角速度センサにより2つの異なる軸線周りのオートバイの回転角速度が決定され且つこれらの回転角速度から自動車の横揺れ角(ロール角)並びに場合により縦揺れ角(ピッチ角)もまた決定される、オートバイのための傾斜角決定方法が既知である。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】独国特許出願公開第10235378号明細書
【特許文献2】独国特許出願公開第102004060292号明細書
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明の課題は、簡単な手段により自動車における走行安全性を改善することである。
【課題を解決するための手段】
【0006】
この課題は、本発明により、請求項1の特徴により解決される。従属請求項は目的に適った変更態様を与える。
【0007】
本発明による方法は、加速過程の間における自動車特に例えばオートバイのような自動二輪車の安定化に関するものである。制御不能な走行状況を阻止するために、本発明により、自動車の実際縦揺れ角(ピッチ角)が決定され、この場合、実際縦揺れ角が限界縦揺れ角を超えないような手段がとられる。このために、自動車内において、自動車縦方向加速度が低減または制限されて限界縦揺れ角が超えられないように操作要素が操作される。
【0008】
限界縦揺れ角への制限は、それを介して縦方向加速度が調節可能な自動車の装置への係合により行われる。この装置は、例えば後車輪を制動するための自動車のブレーキ装置である。例えば自動車の内燃機関における燃料噴射の制限ないしはそれに対応する空気質量の制限による機関トルクの絞り即ち駆動機関の調節もまた考慮される。自動車縦方向加速度を低下させるためのこれらの手段は交互に作動されても同時に作動されてもよい。実行されるべき手段は、他の状態変数または運転変数例えば縦方向加速度の絶対高さまたは縦方向加速度の上昇の関数であってもよく、この場合、縦揺れ角の制限をきわめて急速に実行するために、ブレーキ係合およびそれに続く機関トルクの絞りが行われることが好ましく、他方で、縦揺れ角限界値へ徐々に近づけるときには機関トルクの絞りだけで十分である。
【0009】
限界縦揺れ角は、それが超えられてはならない限界値ないしはしきい値を示す。この場合、例えば超えられてはならない最大値に制限することにより、設定値は固定値として考慮される。さらに、限界縦揺れ角を、実際走行状況の関数として、特に実際の走行状態変数ないしは運転変数の関数として可変に決定することもまた可能である。即ち、例えば、横方向の動的状態変数の大きな値においてないしは横方向の動的状態変数の上昇においては限界縦揺れ角が小さい値にセットないしは低下されるように、限界縦揺れ角を横方向の動的状態変数の関数として決定することが目的に適っている。したがって、例えば限界縦揺れ角が値0に低下され、これにより、前車輪が路面接触を有し且つコーナリング・フォースを伝達可能であることにより、例えばカーブ走行において自動車の安定性が保持され続けることが保証されている。横方向の状態変数として、例えば自動車の横揺れ角(ロール角)、横方向加速度および/またはヨーレートが考慮される。状態変数は、限界縦揺れ角の決定において個別に考慮されても同時に考慮されてもよい。
【0010】
目的に適った他の一実施形態により、限界縦揺れ角の決定においてないしは実際縦揺れ角の制限過程において考慮される状態変数の妥当化が実行されるように設計されている。妥当化において、一方で、特定の走行状況において測定された状態変数が妥当性に関して検査されてもよい。即ち、例えばアイドリングにおける直進走行において、即ち機関トルク要求が存在しないとき、自動車は直線方向に向けられ且つ垂直状態に存在するので、横揺れ角並びに縦方向加速度の測定値はそれぞれ値0またはほぼ値0をとるはずである。さらに、前車輪および後車輪における車輪回転速度は少なくともほぼ同じ大きさであるはずである。
【0011】
他方で、実際縦揺れ角を2つの異なる方法で決定することもまた可能であり、これにより、測定エラーに対する信頼性が向上される。例えば、好ましい実施形態により、縦揺れ角が、測定された縦揺れ角速度(ピッチレート)の積分により決定される。しかしながら、妥当化のために、さらに、比較縦揺れ角が自動車の他の状態変数から決定されてもよい。比較縦揺れ角は、例えば、自動車の縦方向加速度から車両形状を考慮して決定される。この場合、例えば自動車の車輪速度のような他の測定変数が考慮されてもよい。
【0012】
実際縦揺れ角および比較縦揺れ角の間に偏差がある場合、安全性の理由から、より大きいほうの縦揺れ角値が考慮され且つ自動車の装置への係合の基礎とされることが好ましい。それに基づいて、自動車の縦方向加速度は、より小さいほうの縦揺れ角が基礎とされた場合よりもより強く低下される。
【0013】
本方法を実行するために必要な測定値は、例えばドメイン・コントロール・ユニット(Domain Control Unit)内に含まれている例えば6D測定技術を介して決定される。基本的に、必要な慣性信号として、それから積分により縦揺れ角が決定可能な縦揺れ角速度のみが、並びに場合により縦方向加速度のみが必要となるにすぎない。例えば車輪速度のような他の測定信号は、車両内において実行されるアンチロック・システムから得ることが可能である。
【0014】
他の利点および目的に適った実施形態が、他の請求項、図面の説明および前車輪高さを制御するためのブロック回路図を示す図面から得られる。
【図面の簡単な説明】
【0015】
【図1】図1は、本発明による自動車特に自動二輪車の前車輪高さを制御するためのブロック回路図を示す。
【発明を実施するための形態】
【0016】
ブロック回路図1からわかるように、前車輪高さを制御するために、はじめに、第1のブロック2において、例えばオートバイのような自動二輪車の実際縦揺れ角θが決定される。縦揺れ角θは、オートバイが車両前進方向に対して直交する横方向軸線周りに持ち上げられる角度を表わし、この場合、縦揺れ角=0は前車輪が走行路面に接触していることを意味し、縦揺れ角>0は前車輪が走行路面から持ち上がっていることを意味する。
【0017】
縦揺れ角θは、例えば、縦揺れ角速度θ′を測定し且つそれに続いて縦揺れ角速度を積分することにより決定される。それに続くステップ8において、縦揺れ角の目標値θdへの制御が行われ、このことは、次のステップ9において、オートバイ内の装置の操作により行われる。装置として特にブレーキ装置が考慮され、および/または機関トルクを絞るために機関管理への係合が考慮される。このようにして、実際縦揺れ角θの、縦揺れ角に対する最大値を示す限界縦揺れ角θdへの制限が達成される。
【0018】
基本的に、縦揺れ角を制限するために他の状態変数が考慮されてもよく、このことがブロック3、4および5に記号化されている。即ち、ブロック3によりさらにオートバイの縦方向加速度axが、ブロック4により前車輪および後車輪における車輪回転速度ωが、並びにブロック5により横揺れ角速度(ロールレート)ないしは横揺れ角ψが考慮されることが目的に適っている。
【0019】
これらの他の状態変数の考慮は、特に、装置内の状態変数の妥当化を示す他のブロック6を介して、および縦揺れ角を制限するためにブレーキ装置ないしは機関管理への係合が実行されるように満たされていなければならない条件を示す他のブロック7を介して行われる。
【0020】
ブロック6による妥当化は、比較縦揺れ角θcがオートバイの他の状態変数から決定されるように実行されてもよく、この場合、比較縦揺れ角θcおよび実際縦揺れ角θの間の比較が実行される。比較縦揺れ角θcを決定するために使用される他の状態変数として、オートバイの縦方向加速度axがオートバイの形状を考慮した上で考慮され、並びに場合により車輪速度ωもまた考慮される。
【0021】
実際縦揺れ角θおよび比較縦揺れ角θcの間の比較が縦揺れ角値の間に偏差が存在することを与えた場合、安全性の理由から、より大きな縦揺れ角値が選択され且つブロック8による次の制御の基礎とされてもよい。
【0022】
ブロック7による許容条件において、限界縦揺れ角θdは車両内の他の状態変数の関数として決定される。この場合、特に横方向の動的状態変数、例えば横揺れ角ψ、場合により横方向加速度ayまたはヨーレートΨ′もまた考慮され、これにより、車輪にコーナリング・フォースが形成されなければならない走行状況において、前車輪と走行路面との間の接触もまた存在することが保証可能である。この場合、限界縦揺れ角θdは値0にセットされる。このような走行状況とは、例えば比較的大きな横揺れ角ψおよび大きな横方向加速度ayを有するカーブ走行である。
【0023】
限界縦揺れ角θdは、さらに、縦方向の動的状態変数の関数として決定されてもよい。例えば、比較的高い速度においては、安全性の理由から、より小さい限界縦揺れ角θdのみを許容することが目的に適っている。
【0024】
ブロック7において決定された限界縦揺れ角θdに対する値は、制御を記号化したブロック8内に入り且つそこで制御の基礎とされる。
【符号の説明】
【0025】
1 ブロック回路図
2 θの考慮
3 axの考慮
4 ωの考慮
5 横揺れ角速度ないしはψの考慮
6 妥当化
7 θdの決定
8 θdへの制御
9 装置の操作
【特許請求の範囲】
【請求項1】
自動車特に自動二輪車の安定化方法において、
自動車の実際縦揺れ角(ピッチ角)(θ)が決定され且つ装置を介して縦方向加速度(ax)が調節可能な該装置への係合により限界縦揺れ角(θd)に制限されることを特徴とする自動車特に自動二輪車の安定化方法。
【請求項2】
縦揺れ角(θ)を制限するために自動車のブレーキ装置が操作されることを特徴とする請求項1に記載の安定化方法。
【請求項3】
縦揺れ角(θ)を制限するために自動車の機関トルクが絞られることを特徴とする請求項1または2に記載の安定化方法。
【請求項4】
縦揺れ角速度(ピッチレート)(θ′)が測定され且つ実際縦揺れ角(θ)が縦揺れ角速度(θ′)の積分により決定されることを特徴とする請求項1ないし3のいずれかに記載の安定化方法。
【請求項5】
走行運転中における限界縦揺れ角(θd)が自動車の状態変数ないしは運転変数の関数として決定されることを特徴とする請求項1ないし4のいずれかに記載の安定化方法。
【請求項6】
限界縦揺れ角(θd)が縦方向または横方向の動的状態変数の関数であり、この場合、縦方向または横方向の動的状態変数の上昇と共に限界縦揺れ角(θd)が低下されることを特徴とする請求項5に記載の安定化方法。
【請求項7】
横方向の動的状態変数として、横揺れ角(ロール角)(ψ)、横方向加速度(ay)およびヨーレート(ヨー角速度)(Ψ′)の少なくともいずれかが考慮されることを特徴とする請求項6に記載の安定化方法。
【請求項8】
縦方向の動的状態変数として、車両速度(vx)が考慮されることを特徴とする請求項6または7に記載の安定化方法。
【請求項9】
限界縦揺れ角(θd)が最大値に制限されることを特徴とする請求項1ないし8のいずれかに記載の安定化方法。
【請求項10】
測定値が既知の比較値と比較されることにより、測定値の妥当化が実行されることを特徴とする請求項1ないし9のいずれかに記載の安定化方法。
【請求項11】
さらに、比較縦揺れ角(θc)が自動車の他の状態変数から決定されることを特徴とする請求項10に記載の安定化方法。
【請求項12】
比較縦揺れ角(θc)が自動車の縦方向加速度(ax)から決定されることを特徴とする請求項11に記載の安定化方法。
【請求項13】
実際縦揺れ角(θ)および比較縦揺れ角(θc)の間に偏差があるとき、より大きいほうの縦揺れ角値が使用されることを特徴とする請求項10ないし12のいずれかに記載の安定化方法。
【請求項14】
前車輪および後車輪における回転速度センサからの測定値が縦方向加速度センサの測定値を介して妥当化されることを特徴とする請求項10に記載の安定化方法。
【請求項15】
請求項1ないし14のいずれかに記載の安定化方法を実行するための制御/操作装置。
【請求項1】
自動車特に自動二輪車の安定化方法において、
自動車の実際縦揺れ角(ピッチ角)(θ)が決定され且つ装置を介して縦方向加速度(ax)が調節可能な該装置への係合により限界縦揺れ角(θd)に制限されることを特徴とする自動車特に自動二輪車の安定化方法。
【請求項2】
縦揺れ角(θ)を制限するために自動車のブレーキ装置が操作されることを特徴とする請求項1に記載の安定化方法。
【請求項3】
縦揺れ角(θ)を制限するために自動車の機関トルクが絞られることを特徴とする請求項1または2に記載の安定化方法。
【請求項4】
縦揺れ角速度(ピッチレート)(θ′)が測定され且つ実際縦揺れ角(θ)が縦揺れ角速度(θ′)の積分により決定されることを特徴とする請求項1ないし3のいずれかに記載の安定化方法。
【請求項5】
走行運転中における限界縦揺れ角(θd)が自動車の状態変数ないしは運転変数の関数として決定されることを特徴とする請求項1ないし4のいずれかに記載の安定化方法。
【請求項6】
限界縦揺れ角(θd)が縦方向または横方向の動的状態変数の関数であり、この場合、縦方向または横方向の動的状態変数の上昇と共に限界縦揺れ角(θd)が低下されることを特徴とする請求項5に記載の安定化方法。
【請求項7】
横方向の動的状態変数として、横揺れ角(ロール角)(ψ)、横方向加速度(ay)およびヨーレート(ヨー角速度)(Ψ′)の少なくともいずれかが考慮されることを特徴とする請求項6に記載の安定化方法。
【請求項8】
縦方向の動的状態変数として、車両速度(vx)が考慮されることを特徴とする請求項6または7に記載の安定化方法。
【請求項9】
限界縦揺れ角(θd)が最大値に制限されることを特徴とする請求項1ないし8のいずれかに記載の安定化方法。
【請求項10】
測定値が既知の比較値と比較されることにより、測定値の妥当化が実行されることを特徴とする請求項1ないし9のいずれかに記載の安定化方法。
【請求項11】
さらに、比較縦揺れ角(θc)が自動車の他の状態変数から決定されることを特徴とする請求項10に記載の安定化方法。
【請求項12】
比較縦揺れ角(θc)が自動車の縦方向加速度(ax)から決定されることを特徴とする請求項11に記載の安定化方法。
【請求項13】
実際縦揺れ角(θ)および比較縦揺れ角(θc)の間に偏差があるとき、より大きいほうの縦揺れ角値が使用されることを特徴とする請求項10ないし12のいずれかに記載の安定化方法。
【請求項14】
前車輪および後車輪における回転速度センサからの測定値が縦方向加速度センサの測定値を介して妥当化されることを特徴とする請求項10に記載の安定化方法。
【請求項15】
請求項1ないし14のいずれかに記載の安定化方法を実行するための制御/操作装置。
【図1】


【公表番号】特表2012−519110(P2012−519110A)
【公表日】平成24年8月23日(2012.8.23)
【国際特許分類】
【出願番号】特願2011−552369(P2011−552369)
【出願日】平成22年1月8日(2010.1.8)
【国際出願番号】PCT/EP2010/050117
【国際公開番号】WO2010/099987
【国際公開日】平成22年9月10日(2010.9.10)
【出願人】(591245473)ロベルト・ボッシュ・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツング (591)
【氏名又は名称原語表記】ROBERT BOSCH GMBH
【Fターム(参考)】
【公表日】平成24年8月23日(2012.8.23)
【国際特許分類】
【出願日】平成22年1月8日(2010.1.8)
【国際出願番号】PCT/EP2010/050117
【国際公開番号】WO2010/099987
【国際公開日】平成22年9月10日(2010.9.10)
【出願人】(591245473)ロベルト・ボッシュ・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツング (591)
【氏名又は名称原語表記】ROBERT BOSCH GMBH
【Fターム(参考)】
[ Back to top ]