
自動車用レーダ・システムおよび方法
【課題】 アンテナ・ビームの各々における距離ゲートを変化させることによって、検出ゾーンのカバレッジを可変とする。
【解決手段】 レーダ検出プロセスは、FFT出力信号の導関数を計算し、指定検出ゾーン内において物体を検出することを含む。一実施形態では、FFT出力信号の二次導関数におけるゼロ交差が物体の存在を示す。物体の距離は、ゼロ交差が発生した周波数の関数として判定する。また、各レーダ・ビームおよび処理サイクルにおいて物体の有無を示す指標を収容した検出表についても記載する。このような指標を少なくとも2つ組み合わせて、検出ゾーンにおける物体の有無を検出する。
【解決手段】 レーダ検出プロセスは、FFT出力信号の導関数を計算し、指定検出ゾーン内において物体を検出することを含む。一実施形態では、FFT出力信号の二次導関数におけるゼロ交差が物体の存在を示す。物体の距離は、ゼロ交差が発生した周波数の関数として判定する。また、各レーダ・ビームおよび処理サイクルにおいて物体の有無を示す指標を収容した検出表についても記載する。このような指標を少なくとも2つ組み合わせて、検出ゾーンにおける物体の有無を検出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、一般的には、輸送手段(車両)用レーダ・システムに関し、更に特定すれば、車両に近接する別の車両や物体を検出するレーダ・システムに関する。
【背景技術】
【0002】
当技術分野では公知であるが、自動車やボートのような車両(輸送手段)に関連する種々の用途のために、レーダ・システムが開発されている。車両に搭載したレーダ・システムは、当該車両付近にある別の車両を含む物体の存在を検出する。自動車の用途では、このようなレーダ・システムは、制動(ブレーキ)システムと共に用いて能動的衝突回避を行ったり、自動車用クルーズ(巡航)制御システムと共に用いてインテリジェントな速度および交通間隔制御を行うことができる。更に別の自動車の用途では、レーダ・システムは、ドライバに対して受動的障害指示をディスプレイ上に与える。
【0003】
自動車の運転における安全性に対する以前からの懸念の1つに、自動車の横方向盲点(side blind spot)における物体検知の困難さがある。事故が発生するのは、多くの場合、自動車が車線変更時にその盲点において別の車両と衝突するときである。
【0004】
通例では、種々のサイズおよび構造のバックミラーやサイド・ミラーを用いて、盲点の視認性(視覚化)を改善すべく努めている。例えば、凹状ミラーは平面ミラーよりも視野が広い。しかしながら、凹状ミラーにおいて見える物体は、車両からのそれらの実際の距離よりもはるか遠くに見える。また、雨天、降雪、または暗がりという条件下では、ミラーを通じての視覚は低下する。
【0005】
雨天、降雪、および暗がりを含むあらゆる種類の環境条件下においても高精度かつ信頼性高く、車両の盲点における物体、一般的には車両に近接する物体を検出する有効な方法が求められている。有効な検出システムの別の特徴は、検出ゾーンが明確に規定されており、その内部における検出確率が非常に高く、その外部では検出確率が非常に低いことである。
【0006】
当技術分野では公知であるが、多くの種類のレーダ伝送技術があり、その1つに周波数変調連続波(FMCW:frequency modulated continuous wave)伝送がある。FMCW伝送では、送信信号の周波数が、第1所定周波数から第2所定周波数に線形に増加する。FMCWレーダには、感度が高く、送信電力が比較的低く、距離分解能が高いという利点がある。
【0007】
FMCW伝送信号を発生するには、種々の回路および技法を用いることができる。一技法では、ランプ(傾斜)特性を有する信号電圧(ここでは、「ランプ信号」またはランプ電圧」と呼ぶ)を電圧制御発振器(VCO)に供給し、周波数変調送信信号を発生する。この信号のことを、一般にチャープ信号(chirp signal)と呼ぶ。通例では、ランプ信号は、アナログ回路によって発生する。このアナログ回路は、タイミング・パルス発生回路、積分器、および増幅器を含むことがある。このようなアナログ回路の構成素子は、設計段階において固定されてしまうので、このような回路の多様性は、あるにしても、さほど高くない。
【0008】
理想的には、VCO出力信号の周波数は、ランプ電圧に対して線形に変化する。ランプ信号および/またはVCOの動作に非線形性があると、RF戻り(反射)信号の周波数はRF周波数範囲全域に拡散する可能性があり、即ち、「スメア(不鮮明)になる」可能性があり、このため、レーダ・システムのターゲット検出、分解能、および距離精度性能が低下する。
【0009】
FMCW伝送信号を発生するには、直接ディジタル合成(DDS:direct-digital synthesis)を用い、送信信号自体をディジタル的に合成するという別の技法がある。典型的なDDSシステムは、位相アキュムレータ(累算器)およびディジタルーアナログ(D/A)変換器を含む。しかしながら、送信信号レートは、ナイキストの定理によって、D/A変換器の最大クロック・レートの半分に制限されてしまう。DDSシステムの別の欠点には、複雑さおよびコスト、それに加えて、現在入手可能なDDS合成器の動作周波数およびチューニング(同調)範囲の制限のために、それを補う必要性によるハードウエア増加が含まれる。
【0010】
また、周知の通り、比較的複雑なレーダ・システムでは、多数の送受信(送信および受信)回路(TRC:transmit and receive circuit)が含まれ、その各々が互いに独立して動作する。このような送受信回路が互いに接近して配され、同一または重複する周波数で動作すると、多数のTRCが互いに干渉し合い、ターゲットの精度高い検出が妨げられる。また、多数のTRCの同時動作によって、別の問題も起こり得る。
【0011】
レーダ・システムには、数々の設計上の課題がある。一例として、同じまたは重複する周波数で動作するレーダ・システムが互いに接近して用いられると、2つのシステムは互いに干渉し合い、ターゲットの精度高い検出が妨げられる。例えば、温度変化に伴う回路性能のばらつきの結果、多数のTRC間で干渉が起こる可能性がある。したがって、比較的簡単に送信信号特性の調節ができるレーダ送信回路を提供することができれば、望ましいであろう。また、レーダ送信機を配置した環境における温度のばらつきによって生ずる、送信信号特性のばらつきを補償するレーダ送信機を提供することができれば、望ましいであろう。更に、非線形VCO動作を補償するFMCWレーダ・システムを提供することができれば、望ましいであろう。更にまた、重複する周波数範囲において多数のTRCの同時動作を可能にする技法を提供することができれば、望ましいであろう。更にまた、多数のFMCW TRCの同時動作を可能とし、レーダ・カバレッジ(radar coverage)の変更が可能なシステムおよび技法を提供することができれば、望ましいであろう。
【発明の概要】
【課題を解決するための手段】
【0012】
レーダ・システムを用いて物体を検出する方法は、送信信号を送信するステップと、物体に衝突した送信信号の少なくとも一部によって発生した受信信号を受信するステップと、送信信号および受信信号に応答して差信号を計算するステップと、差信号に対してFFTを実行しFFT出力信号を得るステップと、FFT出力信号の導関数を計算するステップと、FFT出力信号の導関数のゼロ交差に応答して物体を検出するステップとを含む。物体までの距離は、FFT出力信号の導関数のゼロ交差が発生した周波数によって決定する。一実施形態では、導関数は二次導関数である。
【0013】
また、レーダ・システムを用いて物体を検出するもう1つの方法についても記載する。この方法は、複数の指標を収容した検出表を生成することを含み、各指標は、レーダ・システムに近接する物体の有無を示す。各指標には、それぞれのレーダ・ビームおよび処理サイクルが関連付けられている。この方法は、更に、指標の内少なくとも2つを組み合わせるステップと、組み合わせた指標の内少なくとも1つが物体の存在を示す場合、物体の検出を行うステップを含む。例示の実施形態では、組み合わせた指標は、異なるレーダ・ビームおよび/または異なる処理サイクルと関連付けられている。この技法を用いると、レーダ・システムに近接する物体が高い確率で検出され、検出した物体までの距離も高い精度で判定される。検出表(テーブル)を用いることによって、この方法は、偽検出の確率を低下させる。FFT出力信号の導関数、更に特定すれば、二次導関数を用いることによって、これまでは未検出となる虞れがあった物体が検出可能となる。
【0014】
物体を検出するレーダ・システムは、送信信号を送信する送信機と、物体に衝突した送信信号の少なくとも一部によって発生した受信信号を受信する受信機と、送信信号および受信信号に応答して差信号を計算する減算回路と、差信号にFFTを実行しFFT出力信号を得るFFTプロセッサと、FFT出力信号の導関数を計算する導関数プロセッサと、FFT出力信号の導関数のゼロ交差に応答して物体を検出する検出器とを含む。更に、検出器は、導関数のゼロ交差が発生する周波数に応答して、物体までの距離を判定することができる。
【0015】
レーダ装置は、複数の指標を収容する検出表を格納したメモリを含む。各指標は、物体の有無を示す。検出表における指標の内少なくとも2つを組み合わせ、組み合わせた指標の少なくとも1つが物体の存在を示す場合、物体検出メッセージ(情報)を与えるプロセッサが設けられている。
【0016】
前述の検出技法と同様、レーダ装置は、高い確率で、レーダ・システムに近接する物体を信頼性高く検出し、高い精度で物体までの距離を判定する。
【0017】
本発明によれば、レーダ送信機は、DSPと、DSPの出力端子に結合された入力端子とアナログ・ランプ信号を供給する出力端子とを有するD/A変換器と、アナログ・ランプ信号に応答する入力端子と周波数変調信号を供給する出力端子とを有するVCOとを含む。この構成により、単純で比較的安価な回路を用いて、VCOを制御するアナログ・ランプ信号を発生する。DSP出力ワードを適切に調節しこれに付随するチャープ信号の調節により、様々な有利な特徴を容易に実施することができる。これらの特徴には、VCOおよび駆動回路の温度補償、非線形VCO動作の補償、および干渉低減技法が含まれる。D/A変換器の出力端子とVCOの入力端子との間にアナログ平滑化回路を結合すると、階段状のD/A変換器出力を平滑化することができる。
【0018】
一実施形態では、VCOの出力をアップコンバートして送信信号を供給し、別の実施形態では、VCOが送信信号周波数範囲全域で動作することによって、アップコンバータの必要性をなくする。また、誘電体共振発振器(DRO:dielectric resonator oscillator)を含みチャープ信号を発生するVCOについても記載する。このVCOは、増幅器と、VCOの中心周波数を制御する誘電体共振器と、VCOの周波数同調機能を設ける移相器とを含む。移相器は、三端子デバイスであり、増幅器に結合された入力と、誘電体共振器に接続された出力端子とを有する。誘電体共振器は、増幅器の入力に戻って接続され、正フィードバックを行うことにより、発振器を構成する。加えて、移相器は、制御端子を有し、制御電圧に比例する移相を行うことによって、VCOの周波数を制御する。周波数変調信号即ち「ランプ信号」を制御端子に結合し、ランプ信号に応答するようにする。
【0019】
周波数補償機能について説明すると、これは、所定のディジタル・ワード・シーケンスからこのワード・シーケンスのそれぞれに関連する周波数を有する送信信号を発生するステップと、予測送信信号周波数に関連付けてディジタル・ワードの各々を格納するステップとを含む。送信信号の実際の周波数を検出し、この検出した周波数を発生するのに用いたディジタル・ワードを、実際の送信信号周波数に関連付けて格納したディジタル・ワードと比較する。比較の結果は、誤差値となり、ディジタル・ワードの各々を調節する際に用いられる。一実施形態では、実際の送信信号周波数を検出するには、狭い周波数帯域に応答する回路を用い、誤差値に等しいオフセットを導入することによって、ディジタル・ワードを調節する。一実施形態では、この回路は、送信信号周波数を有する信号に応答するDROとして設けられる。
【0020】
非線形DRO動作を補償する方法によれば、製造中に、所定のディジタル・ワード・シーケンスをD/A変換器に印加し、ワード毎に得られる送信信号周波数を検出することによって、VCOを特徴化する。このプロセスによって、VCO出力周波数をVCO入力電圧に関係付ける、いわゆるVCO曲線が得られる。VCO曲線の形状と相補的な形状を有する曲線を決定し、DSP出力ワードを調節して、相補波形をVCOに供給する。その特性曲線に関して相補的な波形でVCOを制御することによって、このような非線形動作に起因する周波数の不明瞭さ(smear)を低減する。
【0021】
レーダ・システム間の干渉を低減する方法は、VCOを制御するランプ信号を発生するステップと、このランプ信号の少なくとも1つのパラメータをランダムに変化させるステップとを含む。ランプ信号は、複数のサイクルを含み、その各々がオフセット部と、ランプ部と、CW部とを有する。ランプ信号のパラメータは、1つ以上のサイクルにおいてランダムに変化させることができる。ランダムに変化させることができるランプ信号パラメータの一例には、開始ランプ信号電圧、オフセット部の期間、およびランプ部の電圧範囲が含まれる。
【0022】
レーダの動作方法は、検出カバレッジ・エリアを選択するステップと、選択したカバレッジ・エリアに応答して、複数のアンテナ・ビームから1つを選択するステップと、選択したカバレッジ・エリアに応答して、複数のアンテナ・ビームから選択した1つがカバーする範囲を選択するステップとを含む。このような技法では、アンテナ・ビームがカバーする範囲を変化させることができる。
【0023】
本発明の別の特徴によれば、前述の方法は、更に、選択したカバレッジ・エリアに応答して、複数のアンテナ・ビームから1つを選択するステップと、選択したカバレッジ・エリアに応答して、複数のアンテナ・ビームから選択した1つがカバーする範囲を選択するステップとを、複数のアンテナ・ビームを1つずつ選択し終えるまで、繰り返すステップを含む。このような技法では、複数のアンテナ・ビームの各々に規定した範囲を変化させ、レーダ・システムのカバレッジを規定することができる。環境によっては、後者では、自動車のサイズ、周辺視野の優先度またはその他の要因に基づいて、検出ゾーンを変化させることができる。
【0024】
本発明の前述の特徴、および本発明自体は、以下の図面と関連した説明から一層深く理解することができよう。
【図面の簡単な説明】
【0025】
【図1】図1は、レーダ・システムのブロック図である。
【図2】図2は、図1に示す形式のレーダ・システムを複数個含む自動車用近接物体検出(NOD)システムのブロック図である。
【図3】図3は、図2のNODシステムにおいて用いる横方向物体検出(SOD)システムの詳細ブロック図である。
【図4】図4は、温度補償機構を実施するために図3のランプ発生器によって生成するVCO制御信号波形を示す、VCO制御信号電圧対時間のプロットである。
【図5】図5は、干渉低減機構を実施するために図3のランプ発生器によって生成する別のVCO制御信号波形を示す、VCO制御信号電圧対時間のプロットである。
【0026】
図5Aは、別の干渉低減機構を実施するために図3のランプ発生器によって生成する更に別のVCO制御信号波形を示す、VCO制御信号電圧対時間のプロットである。
【図6】図6は、図3のVCO出力信号の周波数と図3のVCO制御信号の電圧との間にある非線形性関係を示す、VCO制御信号電圧対時間のプロットである。
【0027】
図6Aは、VCO制御信号と、図6の非線形VCO特性を補償するために用いられる図3のDSPの出力との間にある関係を示す、VCO制御信号電圧対時間のプロットである。
【図7】図7は、別のSODシステムの実施形態を詳細に示すブロック図である。
【図8】図8は、更に別のSODシステムの実施形態を詳細に示すブロック図である。
【図9】図9は、図3、図7、および図8のDSPのアーキテクチャを例示するブロック図である。
【図10】図10は、車両に配置されたSODシステムが設ける検出ゾーンの一例の概略図である。
【図11】図11Aは、SODシステムによって設けることができる別の検出ゾーンの概略図である。
【0028】
図11Bは、SODシステムによって設けることができる別の検出ゾーンの概略図である。
【図12】図12は、検出ゾーン内部で物体を検出するためにSODシステムによって実施するプロセスを示すフロー・チャートである。
【図13】図13は、図12のプロセスに含まれる副サイクル検出プロセスのタイミング・チャートである。
【図14】図14Aは、図12の検出プロセスの中間段階において発生する出力を示す、信号戻り高速フーリエ変換(FFT)振幅対FFT周波数ビンのプロットである。
【0029】
図14Bは、図12の検出プロセスの別の中間段階におい計算した、図14AのFFT出力の一次導関数および二次導関数を示す、FFT導関数振幅対FFT周波数ビンのプロットである。
【図15】図15は、地理的に拡張したターゲットの検出によって得られるFFT出力の一例、および同じ距離における拡張しないターゲットの検出によって得られるFFT出力の一例を示す、信号戻りFFT振幅対FFT周波数ビンのプロットである。
【図16】図16は、2つの近接したターゲットの検出に伴うFFT出力の一例を示す、信号戻りFFT振幅対FFT周波数ビンのプロットである。
【図17】図17Aおよび図17Bは、SODシステムによって設けることができる検出ゾーンにおける種々の距離選択肢の概略図である。
【図18】図18は、ビーム毎の距離および距離率ビンをメモリに格納した場合のグラフ表示である。
【図19】図19は、検出ゾーンにおいて距離を変更するために、SODシステムによって実施するプロセスを示すフロー・チャートである。
【発明を実施するための形態】
【0030】
発明の詳細な説明
図1および図1Aを参照すると、レーダ・システム10は、アンテナ部14と、送信機22および受信機24双方を有するマイクロ波部20と、ディジタル信号プロセッサ(DSP:digital signal processor)30、電源32、制御回路34およびディジタル・インターフェース・ユニット(DIU:digital interface unit)36を備えた電子回路部28とを含む。送信機22は、電圧制御発振器(VCO)の制御信号を発生するディジタル・ランプ信号発生器を含む。これについては、以下で説明する。
【0031】
レーダ・システム10は、レーダ技術を利用して、システム10の視野内において1つ以上の物体、即ち、ターゲットを検出し、種々の用途に用いることができる。例示の実施形態では、レーダ・システム10は輸送手段(自動車)用レーダ・システム(図2)のモジュールであり、具体的には、側方(横方向)物体検出(SOD:side object detection)モジュールまたはシステムであり、自動車またはその他の車両40上に搭載するように構成され、物体を検出することを目的とする。物体には、限定する訳ではないが、別の車両、木々、標識、歩行者、および車両が位置する経路に近接して位置する可能性がある他の物体が含まれる。当業者には明白であろうが、レーダ・システム10は、多くの異なる種類の用途において用いるのにも適している。その用途には、海洋分野が含まれ、レーダ・システム10はボート、船、またはその他の船舶上に配置することができるが、それらに限定される訳ではない。
【0032】
送信機22は、周波数変調連続波(FMCW)レーダとして動作し、送信信号の周波数は、第1所定周波数から第2所定周波数まで線形に増加する。FMCWレーダには、感度が高く、送信電力が比較的低く、距離分解能が高いという利点がある。しかしながら、他の種類の送信機も使用可能であることは認められよう。
【0033】
制御信号バス42を通じて車両40からレーダ・システム10に制御信号を供給する。DSP30は、これらの制御信号、およびレーダ・システム10が受信したレーダ反射信号を処理し、レーダ・システムの視野内部において物体を検出する。これについては、図10ないし図16に関連付けて以下で説明する。レーダ・システム10は、出力信号バス46を通じて、その視野内部にある物体を特徴付ける1つ以上の出力信号を車両に供給する。これらの出力信号は、予め設定したシステムの閾値をターゲットが超過したときの、ターゲット検出信号を含むことができる。出力信号は、車両40の制御ユニットに結合され、盲点および近接物体検出のように、様々に使用することができる。
【0034】
アンテナ・アセンブリ14は、RF信号を受信する受信アンテナ16と、RF信号を送信する送信アンテナ18とを含む。レーダ・システム10は、バイスタティック・レーダ・システム(bistatic radar system)としてその特性を表すことができる。何故なら、これは、互いに近接して位置する別個の送信アンテナおよび受信アンテナを含むからである。アンテナ16、18は、ステアリング角において多数のビームを生成する。ステアリング角の制御は、同じ方向で送信ビームおよび受信ビームに照準を当てる(point)ように、平行に行う。それぞれのアンテナ16、18の角度を選択するには、多重位置送信および受信アンテナ・スイッチを含む様々の相応しい回路がある。
【0035】
図2も参照すると、図1のレーダ・システム10の応用例が、自動車用近接物体検出(NOD:near object detection)システム100の形態で示されている。NODシステム100は、車両(輸送手段)120上に配置されている。車両120は、例えば、自動車、オートバイ、またはトラックのような自動車両、ボートのような海洋車両または水中車両、あるいは刈り取り機のような農業車両として設けることができる。この特定的な実施形態では、NODシステム100は、前方監視センサ(FLS:forward-looking sensor)システム122、光電センサ(EOS:electro optic sensor)システム124、複数の側方(横方向)監視視センサ(SLS:side-looking sensor)システム128または同等の横方向物体検出(SOD:side object detection)システム128、および複数の後方監視センサ(RLS:rear-looking sensor)システム130を含む。例示の実施形態では、図1のレーダ・システム10はSODシステム128であり、図3に更に詳細に示す。
【0036】
FLS、EOS、SLS、およびRSLシステムの各々は、センサ・プロセッサ134に結合されている。この特定的な実施形態では、センサ・プロセッサ134は、中央プロセッサとして示されており、FLS、EOS、SLS、およびRLSシステムの各々がバスまたはその他の手段を通じてこれに結合されている。尚、別の実施形態では、FLS、EOS、SLS、およびRLSシステムの内1つ以上が、図1のDSP30のような、それ自体のプロセッサを含み、以下で説明する処理を行うようにしてもよいことは認められよう。この場合、NODシステム100は、分散プロセッサ・システムとして設けられる。
【0037】
NODシステム100が含むプロセッサが1つかまたは多数かには係わらず、センサ・システム122、124、128、130の各々によって収集した情報は共有され、プロセッサ134(または分散システムの場合は複数のプロセッサ)は判断ツリー即ち規則ツリーを形成する。NODシステム100は、盲点検出、車線変更検出、車両のエア・バック作動準備を含み、これらには限定されない多数の機能のために用いられ、車線停留(持続)機能を実行することができる。例えば、センサ・プロセッサ134を車両132のエアバッグ・システムに結合することができる。FLS、EOS、SLS、およびRLSシステムの内1つ以上からの信号に応答して、センサ・プロセッサは、車両のエアバッグを「準備」(pre-arm)するのに適した時期を判断することができる。別の例も可能である。
【0038】
EOSシステム124は、光センサ即ちIRセンサ、あるいはセンサの方位面において比較的高い分解能を有する別のいずれかのセンサを含む。1対のRLSシステム130は、三角測量方式を利用して、車両の後部にある物体を検出することができる。FLSシステム122は、1999年7月27日に発行された、「Automotive Forward Looking Sensor Architecture」(自動車用前方監視センサ・アーキテクチャ)と題する米国特許第5,929,802号に記載されている。この特許は、本発明の譲受人に譲渡され、その内容はこの言及により本願にも援用されるものとする。尚、SLSおよびRLSセンサの各々は、同じアンテナ・システムを有するように設けてもよいことは認められよう。
【0039】
センサ・システムの各々は、複数のカバレッジ・ゾーンが車両周囲に存在するように、車両120上に配置されている。したがって、車両は、センサ・ゾーンの繭のような網または覆い内に包囲されている。図2に示す特定的な構成では、4つのカバレッジ・ゾーン68a〜68dが用いられている。カバレッジ・ゾーン68a〜68dの各々は、1つ以上のRF検出システムを利用する。RF検出システムは、カバレッジ・ゾーン68a〜68dの各々において多数のビームを供給する、アンテナ・システムを利用する。このように、別の物体が車両に接近する特定の方向、または車両が別の物体に接近する特定の方向を発見することができる。使用可能な具体的なアンテナの1つが、2001年8月16日に出願され「Slot Antenna Element for an Array Antenna」(アレイ・アンテナ用スロット・アンテナ・エレメント)と題する米国特許出願第09/ 号、および2001年8月16日に出願され「Switched Beam Antenna Architecture」(切換ビーム・アンテナ・アーキテクチャ)と題する米国特許出願第09/ 号に記載されている。これらの各々は、本発明の譲受人に譲渡されており、その内容はこの言及により本願にも援用されるものとする。
【0040】
尚、SLR、RSL、およびFLSシステムは、車両上に着脱可能に展開可能であることは認められよう。即ち、実施形態によっては、SLS、RLS、およびFLSセンサを車両の本体外部に配置する場合もあり(即ち、車両本体の露出面上に配置する)、一方別のシステムでは、SLS、RLS、およびFLSセンサをバンパやその他の車両の部分に埋め込む場合もある(例えば、ドア、パネル、クオータ・パネル、車両の前端、および車両の後端)。また、車両内部(例えば、バンパ内またはその他の場所)に搭載し、しかも着脱可能なシステムを設けることも可能である。搭載するシステムは、2001年8月16日に出願され「System and Technique for Mounting a Radar System on a Vehicle」(レーダ・システムを車両上に搭載するシステムおよび技法)と題する米国特許出願第09/ 号、および2001年8月16日に出願され「Portable Object Detection System」(携帯物体検出システム)と題する米国特許出願第09/ 号に記載されているような形式とすることができる。これらの各々は、本発明の譲受人に譲渡されており、その内容はこの言及により本願にも援用されるものとする。
【0041】
図3も参照すると、SODシステム128(図2)として用いる図1のレーダ・システム10が、更に詳しく示されている。送信機22の動作に関する概略的な全体像では、FMCWレーダは、経時的に所定の態様で変化する周波数を有する信号50を送信する。送信信号50を供給するには、通常、VCO制御信号即ちランプ信号86を電圧制御発振器(VCO)92に入力する。ランプ信号86に応答して、VCO92はチャープ信号88を発生する。
【0042】
RF信号の送信時間の尺度は、受信信号54の周波数を送信信号のサンプル58の周波数と比較することによって判定することができる。したがって、距離の判定は、送信信号のサンプル58および反射信号54の周波数間のビート周波数を測定することによって行われる。ビート周波数は、ランプ信号86の傾きに反射信号の時間遅延を乗算した値に等しい。測定した周波数は、更に、ターゲットおよびレーダ・システム間の相対速度によるドプラ周波数を含む。測定周波数のずれに対する2つの寄与を分離し特定するために、線形ランプ信号の形態で制御信号86をVCO92に供給し、続いて傾きが逆のCW信号またはランプを供給することによって、送信信号50の時間可変周波数を得る。
【0043】
本発明の一態様によれば、VCO制御信号86を発生するには、ディジタル回路および技法を用いる。好適な実施形態では、ランプ信号86は、DSP30およびディジタルーアナログ変換器(DAC)70によって発生する。DSP30およびDAC70を用いてランプ信号96を発生することは、SODシステム10では可能である。何故なら、本発明によれば、検出ゾーン特性の適正な選択によって、チャープ信号88の正確な線形性は不要であると判断されているからである。尚、検出ゾーン特性には、検出ゾーンのサイズ、形状および分解能を含むが、これらに限定される訳ではない。これは、近接距離における送信波形および受信波形間の非線形性に存在する相関の結果である。この構成では、送信信号50の周波数が精度高くしかも容易に制御することができ、いくつかの構造の実現促進が図られる。一例として、ランプ信86における連続ランプの1つ以上の特性をランダムに変化させ、類似する近接レーダ・システム間の干渉を低減する。これを図5および図5Aに示す。別の例として、ランプ信号86を適切に調節することによって、温度補償を実施する。これについては、図4と関連付けて説明する。更に別の例は、図6および図6Aに示すような、VCO動作における非線形性の補償である。更に、SODシステム10の変更は、通常であればハードウエアの変更または調節が必要となるが、単にソフトウエアをDSP30にダウンロードすることにより、容易に行うことができる。例えば、SODシステム10の動作の周波数帯域を容易に変更することができる。これは、動作周波数要件が異なる色々な国でSODを用いる場合に望ましいであろう。
【0044】
図3におけるSODシステム10の電子装置部28は、DSP30、電源32、およびコネクタ154を含み、コネクタ154を介して、SODシステム10と車両40(図1)との間で信号バス42、46(図1)が結合されている。図3におけるコントローラ・エリア・ネットワーク(CAN)送受信機(XCVR)150の形態でディジタル・インターフェース36が設けられており、CANマイクロコントローラ80を介してDSP30に結合されている。周波数の安定化を図るために、CANコントローラ80にはシステム・クロックが結合されている。一実施形態では、システム・クロックは水晶制御発振器として設けられる。アナログーディジタル(A/D)変換器68がビデオ増幅器64の出力を受け、この信号をディジタル形態に変換し、DSP30に結合して検出処理を行う。一実施形態では、A/D変換器68は12ビットA/D変換器として設けられる。しかしながら、個々の用途に対して十分な分解能を有するのであれば、いずれのA/D変換器でも使用可能であることを当業者は認めよう。ディジタル信号バス158がアンテナ切換ドライバ回路103に結合されており、これがマイクロ波スイッチ99、101を制御し、制御信号をマイクロ波スイッチに供給して、アンテナのステアリングを制御する。また、SODシステム10の電子装置部28には、メモリ156も設けられており、その中にソフトウエア命令、即ち、コードおよびデータが格納されている。図3および図7に示す実施形態では、メモリはフラッシュ・メモリ156として設けられている。
【0045】
DSP30は、ディジタル・ランプ出力信号、即ち、ワードをDAC70に供給し、DAC70はランプ・ワードをそれぞれのアナログ信号に変換する。アナログ平滑化回路76がDAC70の出力に結合されており、階段状のDAC出力を平滑化して、ランプ制御信号86をVCO92に供給する。DSP30は、メモリ・デバイス304(図9)を含み、この中に、1組のDSP出力信号、即ち、ワードを収容したルックアップ・テーブル(参照テーブル)が、それぞれのDSP出力信号によって発生される送信信号50の周波数と関連付けて格納されている。このデータは、システムの初期起動の間に、フラッシュ・メモリ156からRAM304に転送される。このデータは、ここに記載するような温度の影響の結果として、適宜補正することができる。例示の実施形態では、VCO92は、カリフォルニア州San DiegoのZ Communications, Inc.が供給するSMW2488デバイスであり、VCO出力信号88は、2.31ないし2.54GHzの範囲の周波数を有する。図7および図8のSODの実施形態は、送信信号を発生する別のVCO構成を示す。
【0046】
図示の自動車用NODシステム100における必要性に応じて、アップコンバータ回路90が、VCO出力信号88をアップコンバートして周波数を高める。即ち、信号88を24.01ないし24.24GHzの間の周波数にアップコンバートする。アップコンバータ90は、50オームの負荷136と、増幅器138と、誘電体共振器(DR)140と、ミキサ142とを含む。増幅器138、誘電体共振器(DR)および伝送線144、146が発振回路を形成し、DR140がその基本周波数において、そして伝送線144から伝送線146までのその通過帯域内においてエネルギを結合し、発振信号を発生し、ミキサ142に結合する。例示の実施形態では、伝送線144上の発振信号の基準周波数は、21.7GHzである。ミキサ142の出力をバンドパス・フィルタ96によって濾波し、増幅器94によって増幅する。増幅器94からの出力信号の一部を、カプラ95を介して結合し、送信信号50を供給して、増幅器78によって更に増幅し、送信アンテナ18によって送信する。増幅器84からの出力信号の別の部分は、受信信号経路内にあるミキサ60のLO入力ポートに供給される局部発振(LO)信号58に対応する。
【0047】
切換回路99、101は、バトラ(Butler)マトリクスを介して受信および送信アンテナ16、18に結合されている。アンテナ18、16および切換回路99、101、ならびにバトラ・マトリクスは、2001年8月16日に出願され「Switched Beam Antenna Architecture」(切換ビーム・アンテナ・アーキテクチャ)と題する米国特許出願第09/ 号に記載されている形式とすることができる。これは、本発明の譲受人に譲渡されており、その内容はこの言及により本願にも援用されるものとする。ここでは、スイッチ(切換)回路99、101およびバトラ・マトリクスは、切換アンテナ・ビームを有するアンテナに、SODシステム10のターゲット検出能力を高めるアンテナ・ビーム特性を与えるように動作することを言えば十分であろう。
【0048】
図示のように、受信信号54は、RF低雑音(ロー・ノイズ)増幅器(LNA)52、バンドパス・フィルタ56、および別のLNA62によって処理される。RF増幅器62の出力信号は、ミキサ60によってダウンコンバートされる。ミキサ60は、図示のように、送信機から結合される局部発振信号58を受ける。増幅器62からのRF信号および局部発振信号の周波数は、一例では約24GHzである。図示の受信機24は、直接変換ホモダイン受信機であるが、他の受信機構成(トポロジー:topology)もSODレーダ・システム10では使用可能である。
【0049】
ビデオ増幅器64は、ダウンコンバート信号を増幅および濾波する。例示した実施形態では、この信号は1KHzないし40KHzの間の周波数を有する。ビデオ増幅器64は、温度補償、漏洩信号の濾波、および周波数に基づく感度制御を含む機構を内蔵することができる。これらについては、2001年8月16日に出願され、「Video Amplifier for a Radar Receiver」(レーダ受信機用ビデオ増幅器)と題する同時係属中の米国特許第09/ に記載されている。これは、本発明の譲受人に譲渡されており、その内容はこの言及により全体的に本願にも援用されるものとする。
【0050】
A/D変換器68は、ビデオ増幅器64のアナログ出力を、次の処理のために、ディジタル信号サンプルに変換する。即ち、ディジタル信号サンプルは、DSP30内部の高速フーリエ変換(FFT)によって処理され、種々の周波数範囲(即ち、周波数ビン)内にある反射信号の内容を判断する。FFTの出力は、信号プロセッサ30の残り部分のデータとして用いられる。信号プロセッサ30では、視野内の物体を検出するための1つ以上のアルゴリズムが実装されている。これについては、図10ないし図16に関連付けて説明する。
【0051】
レーダ・システム10は、温度補償機構を含み、適宜ランプ信号を調節することにより、温度によって誘発される送信信号の周波数のばらつきを補償する。この目的のために、送信機22は、マイクロ波信号検出器74に結合されている誘電体共振器(DR)72を含む。マイクロ波検出器74の出力は、DSP30による処理のために、CANコントローラ80(図9)に含まれるアナログーディジタル変換器に結合されている。
【0052】
動作において、DR72は、送信信号50の周波数がDRの基本共振周波数付近のある範囲内(即ち、DRの通過帯域)にある場合にのみ、エネルギを検出器74に結合する。例示の実施形態では、DR72の基本周波数は、送信周波数範囲内にあり、通過帯域は、送信周波数範囲と比較すると、比較的狭い。この例示の実施形態では、DRは、システムの動作帯域の中央を中心とする約10MHzの通過帯域を有し、十分な周波数検出分解能を備えている。これは、いずれ明白となろう。検出器74は、DR72からの出力電力を検出し、このDRからの出力電力の所定レベルを示す電気信号を供給する。
【0053】
DR72からの出力電力の検出は、DRの基本所定周波数の送信を示す。更に、所定の周波数の送信は、所定のDSP出力ワードに対応し、一方このDSP出力ワードは、参照表(ルックアップ・テーブル)に指定されている「予測」送信周波数に対応する。
【0054】
動作において、DSP30がCANコントローラ80を介して周波数検出器72および74から、所定の周波数の送信を示す出力信号を受けると、DSP内部のソフトウエア比較器82によって、DSP出力に関連する予測周波数を所定の周波数と比較する。測定した検出時間およびコマンド(指令)周波数を相関付け、精度高い周波数測定を行う。予測周波数と測定周波数との間に少しでもずれがあると、これはDSP出力の調節が必要であることを示す。別の言い方をすれば、2つの周波数間の差は、参照表のデータを補正する必要があることを示す。何故なら、予測周波数が、対応するDSP出力に応答して送信されていないからである。
【0055】
単なる一例として、11110000というDSP出力が24.20GHzの送信周波数に対応し、DR72の基本周波数が24.20GHzであることを参照表が示す場合について考える。つまり、DR72からの出力電力の検出は、24.20GHzが送信されていることを示す。しかしながら、更に、DSP出力が11110001で与えられるときに検出が行われると仮定する。この状況は、DSP出力ワードを調節する必要があること、即ち、所望の予測周波数を送信するためには、1だけ下方にずらさなければならないことを示す。
【0056】
送信周波数と予測周波数との間の誤差を補償するには、種々の技法が使用可能である。一例として、新たなDSP出力ワードが供給される毎に、新たな誤差が検出されるまで、オフセットの方向に応じて、誤差量に等しいオフセット(即ち、送信周波数と、DROの基本周波数と関連付けて参照表に格納されているDSP出力ワードとの間の差)を加算または減算すればよい。別の言い方をすると、検出した誤差量だけ後続の各DSP出力を単にずらす。一般に温度は急に変化しないので、この誤差検出および補正は、50msまたは100msに1回というように、比較的少ない頻度で行えばよい。尚、送信信号50の周波数を検出し、DSP30にフィードバックし、DSP出力ワードを調節することによって送信信号の周波数を調節するためには、別の構造および技法も使用可能であることは、当業者には認められよう。
【0057】
また、図4も参照すると、DAC70(図3)の出力として供給される、例示のランプ信号220が示されている。動作において、前述の温度補償機構にしたがって、所定の送信信号周波数(即ち、DRO基本周波数)と、所定の周波数を発生するDSP出力ワードと関連する予測送信周波数との間の誤差を検出し、その結果、前述のように、DSP出力ワードを変更する。DSP出力ワードを上方または下方にずらすことの効果は、それに応じてランプ信号が上方または下方にずれることである。例えば、DSP出力の補正にしたがって、基準ランプ信号220の電圧が下方にずれ、図示のように、温度補償されたランプ信号224が供給される。
【0058】
本発明の更に別の態様によるSOD10の干渉低減機構を実施するには、乱数または擬似乱数発生器84(図3)を用いる。これは、DSP30内部のソフトウエアによって設けることもできる。乱数発生器84を用いて、ランプ信号86の少なくとも1つの特性(aspect)およびパラメータをランダムに変化させる。このようなパラメータの例は、図5に示すような各チャープ・サイクルのオフセット間隔、および図5Aに示すような各チャープ・サイクルにおいて発生する電圧(したがって、周波数)範囲である。
【0059】
図5を参照すると、VCO92に結合するための、ランプ信号86(図3)に対応する、例示のランプ信号230の複数のサイクルが示されている。図示のように、各ランプ・サイクルは時点T1, T2, T3, ...にて開始し、オフセット時点t1, t2, t3,...に開始するランプ(傾斜)部R1, R2, R3, ...およびこれに続くそれぞれのサイクル開始時刻T1, T2, T3, ...を有する。本発明によれば、各サイクルのオフセット間隔(即ち、間隔t1-T1, t2-T2, t3-T4,...)の期間は、DSP30によってランダムに選択する。これを行うには、オフセット間隔に対応するランダム遅延を再帰プロセスに導入し、これによってランプ信号を発生する。例示の実施形態では、各ランプ・サイクルは約1.1msecであり、各サイクルのオフセット間隔は、0ないし0.1msecの間で可能な16の間隔の1つからランダムに選択する。その結果、いずれの所与の時点においても、得られる送信信号50の周波数は、同様のレーダ・システムからの送信信号の周波数とは異なるが、レーダの送信信号範囲は同一である。
【0060】
この構成により、互いに近接して同一周波数範囲で動作する2つの同一SODレーダ・システム10は、互いに干渉しない。何故なら、いずれの所与の時点においても、システムが供給する送信信号の周波数は、互いに対してランダムに変化するからである。この機構によって、2つ以上の同一SODを車両上で用いることが可能となるという利点が得られる。これは、NODシステムの部品点数を削減し、NODシステム内部における1つ以上のモジュールの交換を簡略化するためには望ましいことである。近接するSOD間の干渉を低減する際、各SODを手動で操作したりプログラムして異なる送信信号を確保するのであれば、余り望ましくはない。
【0061】
図5Aのランプ信号234によって例示した、干渉を低減する別の技法では、SODシステム10に対して指定された周波数範囲内に収まりつつ、各ランプ・サイクルの間に、送信信号50の周波数範囲をランダムに変化させることを伴う。これを行うには、ピーク−ピーク・ランプ信号電圧を一定に保ちつつ各サイクルの間にランプ信号のランダムなオフセット電圧を導入する(即ち、ピーク−ピーク・ランプ電圧を一定に保ちつつ、ランプを上下に移動させる)。例えば、時点T1にて開始するサイクルの間、ランプR1は1ボルトから2.5ボルトに上昇し、したがって第1周波数範囲に対応する。次のサイクルの間、ランプR2は1.25ボルトから2.75ボルトに上昇し、第2の異なる周波数範囲に応答する。例示の実施形態では、送信信号50の周波数範囲は、24の異なる周波数範囲からランダムに選択する。
【0062】
オフセット電圧をランプ信号に導入し電圧範囲をランダムに変化させるためには、回路のアナログ部分またはディジタル部分のいずれにおいても、種々の技法が可能である。一例として、平滑化回路76(図3)によって、オフセット電圧を導入する。
【0063】
尚、図5Aのランプ信号234のランプR1, R2, R3, ...は、図5に関連付けて先に説明したように、ランダムなオフセット間隔(即ち、t1-T1, t2-T2, t3-T3, ...として計算されるオフセット間隔)を有するが、送信周波数範囲は、オフセット間隔を変化させなくても、ランダムに変化させ得ることは認められよう。別の言い方をすれば、各ランプ・サイクルのオフセット間隔をランダムに変化させ、各ランプ・サイクルの周波数範囲をランダムに変化させる技法は、別個にまたは組み合わせて実施することができる。また、図5および図5Aでは各ランプ・サイクルのオフセット間隔をランダムに変化させ、図5Aでは各ランプ・サイクル毎に電圧範囲をランダムに変化させているが、選択したパラメータ(複数のパラメータ)は、ランプ・サイクルの1つ以上においてランダムに変化させればよく、あらゆるランプ・サイクルにてランダムに変化させる必要はないことも認められよう。
【0064】
SODシステム10の別の特徴は、VCO92(図3)の非線形動作の補償である。図6は、VCO出力信号88(図3)の周波数とVCO制御信号電圧86(図3)との間にある関係を表す曲線238を示す。図示した曲線238は、約180MHzの典型的な周波数範囲と、約1.25ボルトの典型的な電圧範囲とを有する。理想的なVCOでは、この関係は、曲線236で示すように、線形となるが、通例では、曲線238で示すように、多少の非線形性がある。更に具体的には、DSP出力ワードを調節し、実際の曲線238に関して実質的に相補的なランプ電圧(即ち、DAC出力電圧)を供給する。このような相補曲線240を図6Aに示す。
【0065】
VCO92の動作は、DSP出力ワード・シーケンスをDAC70に供給し、検査(テスト)受信機(図示せず)によって送信周波数を測定することを特徴とする(即ち、図6のような曲線を生成する)。このようなVCOの特徴化は、製造において、VCOのSODシステム10に挿入する前または後、あるいはSODシステムを車両上に配備する前または後に行うことができる。VCOを特徴化させれば、理想的な特性(図6において236で示す)に対して曲線の相補を取ることによって、図6Aの相補曲線が簡単に決定される。次いで、図6AのVCO制御信号240を発生するために必要なDSP出力ワード・シーケンスを決定することができる。単なる一例として、VCOの特徴化に先だって、DSP出力シーケンス00000000、00000001、00000010、00000011、...を用いれば、線形なランプを発生し、VCOの非線形性を補償することができ、シーケンスを調節して00000000、00000000、00000001、00000010、...にすることができる。制御信号240を発生するために必要なDSP出力ワード・シーケンスを決定するプロセスは、手動で行うことができ、あるいは自動で行うことができ、好ましくはシステム毎に反復可能とする。通例では、DSP出力ワードに対する補正は、ソフトウエアで行い、メモリに格納する。
【0066】
VCO出力周波数が入力電圧によって変化する様子がわかれば、VCO制御電圧86を調節し、VCOの出力周波数を所望の態様で掃引させることができる。VCO出力とVCO入力との間にある関係は非線形であるが、VCO出力とDSP出力との間にある関係はほぼ線形である。
【0067】
また、図6におけるVCO92の特性曲線238がわかれば、システムを最適化し、VCOの特定の入力電圧範囲で動作するようにできることも認められよう。即ち、所望のDAC出力電圧範囲を発生するために必要なDSP出力ワードの範囲を選択するだけで、VCOの動作の最も線形な領域(図6において242で示す)をDAC出力電圧範囲として選択することができる。
【0068】
図7も参照すると、代わりのSODシステム250が図3のSODシステム10と異なるのは、ランプ信号86を処理して送信信号50を発生する送信機22のVCO部である。図3のSODシステム10と同一のSODシステム250の部分は、同一の参照番号が付されている。図3のVCO92と同様、VCO254は、ランプ信号86に応答し、出力信号をバンドパス・フィルタ96に供給する。一方、バンドパス・フィルタ96は、24.01ないし24.24GHzの範囲の所望の送信周波数を有する出力信号を供給する。
【0069】
SODシステム250は、電圧制御DRO254の形態でVCO254を含む。更に、VCO254は、増幅器270に結合されている50オーム負荷258も含む。一方、増幅器270は、ダイオード移相器262に結合されている。移相器262、信号結合経路268、272、増幅器270、および誘電体共振器266が発振ループを形成する。
【0070】
動作において、DR266はその通過帯域以内で信号を伝送線268から伝送線272に転送する。増幅器が飽和するまで、増幅器270によって信号を増幅する。DR266の通過帯域は、所望の送信周波数範囲をカバーするように選択され、例示の実施形態では、24.01ないし24.24GHzの範囲である。伝送線268上の最終的な信号周波数を制御するには、移相器262によって導入される位相シフトを調節する。このように、ダイオード移相器262は、発振ループ上において位相の補強を行い、発振ループは、移相器およびDRを含むフィードバック・ループによって決定された周波数を求める。一般に、フィードバック・ループが発振する周波数において、フィードバック信号、例えば、信号経路272上の信号は、ループに沿ってその開始点に戻ったときに、0度の位相(または360度位相のいずれかの倍数)、および1よりも大きいループ利得を達成する。即ち、ループ1周の利得は1よりも大きい。このように、移相器262を変更することによって、フィードバック信号が0度を達成する周波数を同様に変化させ、ループ利得が1よりも大きいままであれば、ループは、変更した周波数で発振する。図7の構成では、VCO254によって供給される信号のアップコンバートは不要である。何故なら、VCOは所望の送信周波数範囲内で動作し、送信信号50を発生するからである。
【0071】
図8も参照すると、代わりとなる別のSODシステム280が図3のSODシステム10と異なるのは、送信機のVCO部およびアンテナ構成である。図3のSODシステム10と同一であるSODシステム280の部分には、同様の参照番号が付されている。
【0072】
SODシステム280は、アナログ平滑化回路76からランプ信号86を受けるVCO284を含む。図示のように、VCO284は、24.01ないし24.24GHzの間の送信周波数範囲で動作し、出力信号をバンドパス・フィルタ96に供給する。VCO284は送信周波数範囲で動作するので、VCO出力信号(図3)をアップコンバートする必要はない。
【0073】
尚、図3のSODシステム、図7のSODシステム250、ならびに図8のSODシステム8の特徴、構成素子、エレメント、およびその他の部分は、混成させたり、並置させてもよいことは、当業者には認められよう。一例として、図3のアンテナ構成を、図7のVCO254または図8のVCO284と共に用いてもよいことは認められよう。
【0074】
図9を参照すると、SOD電子装置28(図1、図3、図7、および図8)のブロック図が詳細に示されており、DSP30、CANマイクロプロセッサ80、CAN送受信機150、電源32、およびメモリ156を含む。メモリ156は、データおよびプログラム情報を不揮発的に格納する。また、ビデオ増幅器64も示されており、出力信号をA/D変換器68に供給する。A/D変換器68は、DSP30のポート312に結合されている。一実施形態では、メモリ156は、128k×8フラッシュ・メモリとして設けられており、ポート312はDSP30のシリアル・ポートとして設けられている。D/A変換器70は、図示のように、ポート312を介してDSPから、ディジタル・ワード・シーケンスの形態でディジタル化ランプ信号を受け取り、更に平滑化回路76に結合されている。
【0075】
DSP30は、VCO制御信号電圧86対送信周波数の参照表のようなデータを格納したRAM304と、以下で説明する検出アルゴリズムを実施するために用いられるソフトウエア・コードのようなプロセス命令を格納したプログラムRAM306とを含む。メモリ156に格納されているプログラムおよびデータ情報は、電源投入時に、プログラムRAM306およびデータRAM304にそれぞれ転送される。図示のDSP30は、Analog Devices, Inc.が製造するADSP2186Mマイクロプロセッサであり、33MHzで動作する発振器308を含む。33MHzを内部で倍増し、DSPのクロック・レートである66MHzとする。
【0076】
DSP30は、更に、ディジタル入出力(I/O)ポート314も含み、ここでアンテナ制御信号がバス158上に供給される。DSP30は、ディジタルI/O314およびシリアル・ポート316を介して、CANマイクロプロセッサ80と通信を行う。シリアル・ポート316は、更に、シリアルEEPROM340に結合されている。シリアルEEPROM240は、較正定数、診断検査結果、およびトラブル・コードのようなデータを保持するために用いられる。
【0077】
例示の実施形態では、温度補償を実施するために用いられる乱数発生器84(図3)、および非線形VCO動作を補償するために用いられる比較器82(図3)は、DSPによって一連のソフトウエア命令として実施され、プログラムRAM306に格納され、マイクロプロセッサが実行する。しかしながら、これらの機能ブロックおよびその他のブロックは、ハードウエア、ファームウエア、ソフトウエア、あるいはハードウエア、ファームウエアまたはソフトウエアの組み合わせでも実施可能であることは、当業者には認められよう。
【0078】
図示のCANマイクロプロセッサ80は、Texas InstrumentsのTMS470系の1つである、TMS470R1F316であり、RAM320、フラッシュ・メモリ322、A/D変換器328、シリアル・ポート330、ディジタルI/Oポート332、CANインターフェース334、およびここでは4.915MHzで動作する発振器324を含む。図示のように、CANマイクロプロセッサ80は、シリアル・ポート330およびディジタルI/O332を介してDSP30に結合され、更にディジタルI/O332およびインターフェース334を介してCAN送受信機150に結合されている。
【0079】
CAN A/D変換器328は、種々の監視信号を受けるように構成された複数の多重化入力を有する。一例として、周波数検出器74(図3)の出力がCAN A/D変換器328に結合されている。CAN A/D変換器328への別の任意の入力が、温度センサ98(図3)によって供給される。温度センサは、受信機22の温度を示す出力信号を供給し、単独で用いてもまたは発振器90(図3)の機構と共に用いても、RFVCO90において温度によって誘発される周波数のばらつきを補償することができる。停電を検出するための任意の検出器も、A/D変換器328に結合することもできる。CAN A/D変換器328は、通常はDSP30による処理のために、受けた信号をディジタル形態に変換する。
【0080】
次に図10を参照すると、上面図で示す検出ゾーン500の一例は、方位領域であり、この中では、SODシステム504(SODセンサ504とも呼ぶ)が物体を検出するように指定されている。SODシステム504は、図1ないし図9において先に説明した形式とすることができる。SODシステム504を搭載した自動車508に近接する特定の検出ゾーン500以内の物体のみが検出に適格とされ、検出ゾーン500外部の物体は除外される。
【0081】
図示したゾーン500は、検出ゾーン形状の一例に過ぎず、この形状はレーダ・システムを用いる用途に応じて異なる。例えば、自動車用SODシステムは、交通の隣接車線内において、車両の盲点内にある物体を含む、物体を検出するように設計されている。隣接する交通車線よりも遠い車線や、盲点の外側にある物体を検出しても、望ましくないであろう。別の例として、限定する訳ではないが、衝突回避を含む目的のために用いられる自動車用FLSシステム122(図2)は、一般に車両の前方において物体を検出するように設計されている。このように、用途毎に異なる形状の検出ゾーン500が必要となる。
【0082】
側方(横方向)検出ゾーン500は、最大検出ゾーン境界512、最小検出ゾーン境界520、ならびに最大および最小検出ゾーン境界間に基準検出ゾーン境界516を含む。好適な実施形態では、SODシステム504は、最大検出ゾーン境界512の外側では物体を検出せず、常に最小検出ゾーン境界520内で物体を検出する。最大検出ゾーン境界512および最小検出ゾーン境界520間に、確率領域524が存在する。SODシステムは、領域524内では物体を検出してもしなくてもよい。確率領域524が存在するのは、SODシステム524を構成する実際の回路構成素子の不良や許容度のためである。理想的には、領域524の幅は0メートルである。したがって、確率ゾーンにおける検出の確率は、0ないし100パーセントの間である。一例の確率領域524は、0.6メートルの最大幅を有する。更に、検出ゾーン500は、SODシステムから検出される最も近い物体までの距離である、最短距離528を含む。例示のSODシステム504では、基準検出ゾーン境界の平均幅は約10メートルであり、平均長は約4メートルである。最短距離528は約0.25メートルである。
【0083】
検出ゾーン500および確率領域524のサイズおよび形状の仕様から、SODシステム・アーキテクチャに関連する多くの設計パラメータが決まる。例えば、SODシステム504は、確率領域524の幅と比較すると比較的高い測定精度で、物体までの距離を判定することができれば、所与の確率領域524内において非検出から所定の検出まで遷移可能なSODシステム性能が得られる。例えば、確率領域の幅が0.6メートルの場合、SODシステムの測定精度は0.06メートル程度でなければならない。
【0084】
検出ゾーン500によって決定されるシステム・パラメータの別の例として、SODシステム504に対して方位方向にある広い検出ゾーン境界512〜520を指定するには、方位方向において広いレーダ・カバレッジが必要となる。更に、複雑な輪郭を有する検出ゾーン境界512〜520では、検出アルゴリズムに多数のビームを用い、各々が異なる検出距離を有していなければならない。検出ゾーンに関係するビームは、図11Aおよび図11Bとの関連で更に詳細に示す。
【0085】
別の例として、検出ゾーン500の指定最短距離528は、好ましくは、図3に関連付けて先に説明したFMCWチャープ信号のような、チャープ信号を用いるシステム・アーキテクチャによって得ることができる。即ち、連邦通信委員会(FCC:Federal Communications Commission)は、前述のSODシステムが用いるような、6デシベル(6dB)(有効等方放射電力(effective isotropic radiated power)は6dBeirp)の低電力レーダは、200MHz以下の周波数帯域幅を有することができると指定している。以下の説明から明らかになろうが、短距離要件528およびFCC帯域幅要件によって、従来のパルス状レーダの使用は除外されることになる。
【0086】
FCCの200MHz帯域幅要件は、SODシステムをFMCWシステムとすることによって満たされる。何故なら、ゆっくりと変化するFMCW信号は、200MHzという狭い帯域幅で発生することができるからである。例えば、SODシステム504が発生する送信信号は、その周波数が約24.000GHzから24.200GHzまで約1msで上昇し、200MHzの帯域幅を有する。対照的に、従来のパルス状レーダは、短距離用途では、200MHzのFCC帯域幅要件を満たすことができない。パルス状レーダは、短距離におけるその検出能力にも限界がある。これは、SODシステムに要求される短距離において動作するためには、パルス状レーダ・システムは非常に短いレーダ・パルスを必要とするからである。技術的にこのような短いパルスを得ることが難しいだけでなく、パルス幅が狭くなるに連れて、送信信号の帯域幅が広くなる。約0.25メートル程の最短距離528における動作を可能とするのに十分短いパルス幅を有するには、パルス状レーダの周波数帯域幅は基本的に200MHzを越えなくてはならない。したがって、検出ゾーン500の特性は、多くの面でシステム設計に影響を及ぼす。受信エコーまたは信号に対して動作する検出アルゴリズム処理も、個々の特性を有する検出ゾーンで動作するように選択される。検出アルゴリズムについては、図12と関連付けて以下で説明する。
【0087】
自動車の横側に検出ゾーン500を示すが、図2に示すように、自動車508の周りには指定したサイズおよび形状の別の検出ゾーンも同様に指定できることは認められよう。例えば、本発明から逸脱することなく、前方および後方ゾーンを指定することができる。通例では、自動車製造業者が、ゾーン・サイズ、形状および自動車に対する位置を含めて、1つ以上の検出ゾーンを指定する。SODシステム504は、車両の側面のどこに搭載されても、適切な横方向検出ゾーン500を設けるように構成することができる。また、本発明では、別の確率ゾーン524および別の最短検出距離528も可能である。
【0088】
また、SODシステム504は、外側のバックミラー532の後ろ側の位置に示されているが、検出ゾーン500およびそのために決められるSLSセンサ504の位置は、自動車508の周囲に沿ったところであればどこにでも設定することができる。
【0089】
次に図11Aおよび図11Bを参照すると、異なる2つの横方向検出ゾーンの例536、548が示されている。図11Aでは、台形状の最大検出ゾーン境界536が設けられている。SODシステムの一例では、斜線で示すように、各々異なる最大検出距離を有する8つの方位方向ビーム540a〜540hが設けられている。これは、ビーム・エコーに対して動作する検出アルゴリズムによって決定する。8つのビーム各々の最大検出距離のアルゴリズムによる制御によって、指定した最大検出ゾーン境界536に対する実際の最大検出ゾーン538の形状が規定される。
【0090】
図11Aおよび図11BのSODシステムの例は、8つのビームを有し、各々、ビーム幅が約15度、全方位走査(total azimuth scan)が150度を越える。尚、本発明から逸脱することなく、別の数のビーム(例えば、8つより多い数や少ない数)や別の走査角度も可能であることは、当業者には認められよう。個々の用途において用いる特定のアンテナ・ビーム数は、所望の検出ゾーン500および確率領域524の幅を含む種々の要因に応じて選択される。尚、要因はこれらに限定される訳ではない。
【0091】
図11Bは、最大境界の形状がほぼ矩形である検出ゾーン548を示す。この場合も、システム例では、8つの方位方向ビームが設けられ、斜線で示すように、各々異なる最大検出距離を有し、距離552a〜552hはビーム540a〜540hとは異なるため、この場合も斜線で示すように、異なる実最大検出ゾーン550を形成する。
【0092】
次に図12を参照すると、図3のDSP30のような、SODプロセッサが実行するプロセス556のフロー図を示す。このプロセスは、主サイクルおよび副サイクルを含む。副サイクルは、SODアンテナ・システムの特定のビームを利用して行なわれる検出動作全てを含む。主サイクルは、SODシステムが設けるビーム群全てを利用して行なわれる動作を含む。ステップ560において主サイクルを開始し、ステップ564において副サイクルを開始する。主サイクル560の開始時に、ビームを最初のビームに設定し直す。副サイクル564の開始時には、ビームを次の隣接ビームに設定し直す。
【0093】
ステップ570において、チャープ信号を開始する。チャープの間、ある数nの受信信号のディジタル・サンプルが、時間期間tにfsKHzのレートで、前述のA/D変換器68(図3)によって処理される。図3に示す実施形態では、n=256、fs=256KHz、そしてt=1msecである。
【0094】
本発明では、他のレートでの他の数のサンプルも可能であるが、nおよびfsの選択によって最終的な周波数および距離分解能が決まるので、システムの検出要件全てを満たすように選択しなければならないことは、当業者には認められよう。
【0095】
ステップ574において、各照準角(pointing angle)毎に距離閾値を確定し、検出ゾーンを規定する。このように、所与のビーム照準角において、SODシステムに対して遠すぎるまたは近すぎて検出ゾーンに該当しない距離検出を、予め確定した距離閾値によって除外する。また、ステップ574において、エコー振幅ウインドウ閾値も確定する。低い方の閾値よりも高く、高い方の閾値よりも低いエコー、すなわち、振幅ウインドウ以内にあるエコーを生成する物体検出のみを有効と見なす。低い方の閾値よりも低いエコーは、物体即ちターゲットではなく、システムのノイズによって生ずる可能性がある。高い方の閾値よりも高いエコーは、別の車両からのレーダ送信のように、干渉するレーダ源によって生ずる可能性がある。このようにして、ステップ574において範囲および振幅双方に閾値を確定する。尚、距離閾値を変更すれば、別の検出ゾーン形状およびサイズも指定可能であることは認められよう。
【0096】
ステップ578において、データ・サンプルを切り詰める(切捨てる)ことにより、データ集合の先頭およびデータ集合の末尾における少数のサンプルを除去する。除去されたサンプルは、ハードウエア上の制約による、望ましくないアーティファクト(artifact)を含む場合がある。ハードウエア上の制約とは、アンテナ・ビーム間で切り替えた後に発生する可能性がある増幅器の静定(セトリング:settling)のようなものである。例示の実施形態では、約256個のデータ・サンプルが切り詰めの後に残留している。
【0097】
また、ステップ578において、残りの入力サンプルに対して振幅の重み付け、即ち、枠付け(ウインドウ処理)を行う。図3の説明から、A/D変換器68のデータ・サンプル出力は、DSP30内のFFTによって処理されることを想起されたい。FFTに入力されるデータ・サンプルの振幅重み付けによって、得られる周波数ドメインにおけるスペクトル・ピークの最小幅、および各FFT周波数ビン(bin)に関連するサイドローブ振幅に関して有効な効果が得られる。本質的に、スペクトル的に純粋な周波数をFFTに入力する場合、入力に重み付けを行うと、その結果FFT出力が現れる周波数ビンの数を、入力に重み付けを行わない場合よりも減らすことができる。受信エコーと送信信号との間の周波数差は距離に直接関係するので、受信エコー周波数を検出する精度は、距離精度に直接関係する。1つのFFTビンよりも細かく周波数を分解することが望ましい。
【0098】
例示のSODシステムでは、チェビシェフ重み関数(Chebyshev weighting function)を入力サンプルに適用する。この重み関数によって、狭帯域信号の多数のFFTビンへの拡散と、良好なサイドローブ抑制との間で適当な妥協が得られる。また、種々の重み関数を入力データ・サンプルに適用することができ、重み付けを適用する際にはハードウエアおよびソフトウエア双方の操作を含む種々の技法が用いられることも、当業者には認められよう。
【0099】
FFTの出力は、当該FFTへのディジタル入力サンプルの周波数ドメインにおけるスペクトル表現であり、ディジタル入力サンプルは時間ドメインのアナログ信号であることは、当業者には認められよう。また、サンプル数nおよびサンプル・レートfsを含むパラメータは、fr=fs/nの関係によって、FFT出力の周波数分解能、即ち、ビンの幅frを決定することも当業者には認められよう。ターゲットの距離は受信信号の周波数に関連があるので、周波数分解能は距離分解能と相関がある。前述のように、指定された検出ゾーン500(図10)を設けるには、距離分解能は0.6メートルよりも高くなければならない。
【0100】
例示のSODシステムでは、256KHzサンプル・レートfsで取り込んだ、256個のデータ・サンプルnを供給する。したがって、得られるFFT周波数分解能fsは1KHzとなる。対応する距離分解能は次のようにして得ることができる。前述のように、例示のSODシステム504(図10)では、200MHzの周波数範囲において約1msecで周波数チャープを掃引する。したがって、1KHzは約5nsecの時間期間を表す。5nsecの間に、レーダ・エネルギは約1.5メートルの距離を伝搬することができる。エネルギはターゲットに向かって伝搬すると共に後方にも伝搬するので、A/D変換器68(図3)からの1KHz信号によって表されるターゲットまでの距離は、約0.75メートルとなる。2KHz信号は、1.5メートルのところにあるターゲットを表す、等となる。このように、幅が1KHzのFFTビンは、0.74メートルのターゲット距離分解能に対応する。この測定精度では、0.6メートル未満という所望の距離分解能を満たさない。したがって、追加の処理が必要となる。
【0101】
例示の実施形態では、ステップ578において、当業者には周知のゼロ・パディング技法(zero padding technique)を、FFTへの入力サンプルに適用し、結果的にRFTビンの幅を縮小する。また、他の技法を用いてもFFTビンの幅を縮小できることは当業者には認められよう。例えば、種々の補間技法が適用可能である。
【0102】
ウインドウ処理され、ゼロ・パディングされた入力サンプルに対して、ステップ582においてFFT処理を行う。チャープ・エコーから時間ドメイン・データ・サンプルを収集し、このデータ・サンプルに対して複素FFTを実行する。後続の処理は、さらに測定精度を向上させることができる。これについては、ステップ606から開始するプロセスで説明する。
【0103】
ステップ586において、複素FFTデータに対して振幅の計算を行うことによって、複素FFTデータのFFT実部および虚部を用いてFFTの振幅、即ち、FFT出力信号を計算する。このことを以降FFT出力データと呼ぶ。
【0104】
方位方向における特定のビーム・ステアリング角に関連するデータ・サンプルはこのようなデータ集合毎に変化する可能性があるので、特定のビーム・ステアリング角に関連する時間ドメイン・データ・サンプルまたはFFT出力データのいずれかの平均をとることによって、偽検出の割合を低下させる、即ち、偽警報率を改善することができる。例えば、システムのノイズまたはその他のアーティファクトが原因で、検出した周波数または振幅にばらつきが生じた場合、平均を取ることによって、このようなアーティファクトの影響を減少させ、したがってシステム性能を向上させることができる。
【0105】
ステップ590において、前述の平均化に用いるために、4つのチャープを処理したか否か判定を行う。4つのチャープが未だ処理されていない場合、処理はステップ570に戻り、別のチャープを開始する。4つのチャープを処理し終えた場合、処理はステップ602に進み、4つのチャープからのFFT出力データの平均を取る。例示のSODシステムは副サイクル・タイミングの間各ビーム毎に4つのチャープの平均を取って用いるが、平均を取るチャープの数はこれ以外でもよいことは当業者には認められよう。
【0106】
ステップ602において、得られたFFT出力データに対して更に距離の正規化を行う。レーダ反射信号の振幅は一般に距離に比例して減少し、FFTビンの増大に比例して距離が延長するが、距離正規化を行わないと、FFT出力データは、FFTビン全体における振幅の減少を示す。距離正規化を行って、FFT出力データの振幅距離依存性(amplitude range dependency)を最小に抑えるような倍率でFFTビンの振幅を調節する。
【0107】
ステップ606において、最小および最大距離閾値、周波数RminおよびTBeamRange、ならびに最小振幅閾値Tobjectをそれぞれ、平均化したFFT出力データに適用する。閾値については、図14Aおよび図14Bに関連付けて更に詳しく説明する。ここでは、距離閾値は、個々のビーム照準角度に対して、SODシステムから近すぎる物体および遠すぎる物体に対する検出を特定的に制限し、必要に応じて、例えば、検出ゾーン500(図10)のような、指定検出ゾーン内で物体を検出することを言えば十分であろう。
【0108】
例示の検出領域500が要求する0.6メートルよりも高い距離精度を得るには、更に処理が必要となる。このために、ステップ606では、DSPによってFFT出力データの一次および二次導関数を計算する。これについては、図13Aおよび図13Bに関連付けて更に詳しく説明する。以下で説明するように、距離精度は、FFT出力データの一次および二次導関数を用いることによって、大幅に向上する。ステップ610において、以下で述べるように、一次導関数および二次導関数の負方向ゼロ交差を計算する。
【0109】
FFT出力データの一次および二次導関数は、検出が行なわれたか否かに関する指示を与える。検出が行なわれた場合、一次および二次導関数は、検出物体の距離も与える。距離閾値の範囲内にある距離で、十分な振幅を有する物体のみが、ステップ612においてSODシステムによって有効と見なされ、これによって副サイクル検出フラグをセットする。ステップ612は、単一のビーム・ステアリング角に関連する検出を行って、副サイクルの処理を終える。
【0110】
ステップ616において、副サイクル検出フラグを検出テーブル(表)、即ち、ターゲット検出報告マトリクスに格納する。このテーブルをブロック616に示すが、アンテナ・ビームに対応する列と、主サイクルに対応する行とを含む。テーブル内の各エントリは、副サイクル検出フラグである。「T」(真)は、副サイクル中に検出された関連のビームにおける副サイクル検出を示し、F(偽)は副サイクル検出がないことを示す。したがって、620で示すエントリは、副サイクル中の第1レーダ・ビームにおける検出を示す。主サイクル毎に1つの行全てが得られ、検出表616の各列は、所与のビーム・ステアリング角に対する連続副サイクル検出フラグから成る。
【0111】
副サイクル検出フラグを表に格納した後、ステップ636において、主サイクルが終了したか否か、即ち、副サイクル検出フラグが最後のビームに対して得られたか否かについて判定を行う。主サイクルが終了していない場合、処理は次のビームのためにステップ564に戻り、このビームに対してステップ564〜616を繰り返す。一方、主サイクルが終了し、検出表の1行が完成した場合、ステップ644において表を分析する。
【0112】
ステップ644において、検出表に格納されている副サイクル検出フラグを論理的に組み合わせ、偽警報率を低下させて警報状態メッセージを発する。警報状態メッセージ644は、検出ゾーン内におけるターゲットの有無を示す。例えば、表において628および632で示すグループのような、4つの副サイクル検出フラグで1組のグループを論理的に組み合わせ、偽警報率を低下させる。論理的に組み合わせたグループ628、632は、副サイクルおよび主サイクル双方に亘ることができる。即ち、1つよりも多い列および1つよりも多い行に亘ることができる。例示の実施形態では、各グループ(例えば、グループ628、632)は検出フラグの2×2マトリクスである。尚、検出表の第3行によって表される主サイクルの完了時にのみグループ632を分析し、一方表の第2行によって表される主サイクルの完了時にグループ628を分析することは認められよう。
【0113】
組み合わせた各グループ628、632を処理し、当該グループ内において少なくとも2つの検出フラグが真であるか否か判定を行う。即ち、副サイクル検出フラグの2×2グループにおいて、2つ以上の副サイクル検出フラグが真であると、ターゲット検出を示す警報状態メッセージが生成される。このように、グループ628の処理では、連続する副サイクルの間にビーム1における連続検出から警報状態メッセージが生成される。同様に、グループ632の処理により、1回の主サイクルの間にビーム4および5における検出によって警報状態メッセージが生成される。副サイクル検出フラグの特定的な論理組み合わせについて述べたが、1つまたは複数のビームおよび1つ以上の主サイクルからの副サイクル検出フラグの別の論理的組み合わせも、本発明では可能であることは当業者には認められよう。ステップ644における主サイクル処理が完了すると、ステップ560において新たな主サイクルが開始される。
【0114】
検出ゾーンにおけるターゲットの存在を示す警報状態メッセージが生成されると、システムは用途に適した処置を講ずることができる。例えば、視覚指示または可聴アラームを発して、SODシステムの検出ゾーン内に物体があることをドライバに警報することができる。
【0115】
図13は、チャープ信号および処理ステップに関する副サイクル・タイミングを示す。副サイクル648は、所定の時間期間(例えば、5.5ms)でビーム・ステアリング角毎に完了する。この時間期間以内に、4つのレーダ・チャープ652a〜652dが送信され、反射チャープ・エコーが送信から識別され、その差が間隔656a〜656dの間にサンプリングされ、間隔660a〜660dの間に差のFFT分析が行なわれ、間隔664a〜664dの間にFFT振幅の計算が行なわれ、間隔668において4つのFFT出力データの平均を取る。間隔672において一次および二次導関数を計算し、分析し、間隔676において副サイクル検出フラグを生成する。次いで、次のビームに対して副サイクル648を繰り返す。尚、間隔668、672、および676に関連する処理は、次の副サイクルにおける第1チャープ680のサンプリングと同時に行なわれる。
【0116】
図5および図5Aに関連付けて先に説明したランダム可変チャープ・オフセット間隔680a〜680dによって、別のSODシステムを含む別のレーダからの受信に起因する偽検出を低減する。
【0117】
副および主サイクル・タイミング全体の選択は、指定の時間間隔内に物体を検出し、システムが適切な時間量で処置を講ずることができるように行う。図示のSODシステム504(図10)では、主サイクルが完了する毎に、即ち、7回の副サイクルが完了する毎に、警報状態メッセージを生成する。したがって、約50msec毎に1回警報状態メッセージを生成する。CANマイクロプロセッサ80(図9)は、車両全体に対して約300msecの同期更新率(synchronous update rate)を有する。つまり、CANサイクル毎に、数回の主サイクルが行なわれ、これに応じて警報状態メッセージが生成される。例示の実施形態では具体的なタイミング選択について述べたが、他のタイミングの選択も可能であることは認められよう。例えば、4つのFFT以外の平均化や、7つ以外のビームも使用可能である。この説明を読んだ後であれば、図13のタイミング構造に対して必要な変更は、どのようなものであれ、いかにして実施すればよいか、当業者には明白にわかるであろう。
【0118】
次に図14Aおよび図14Bを参照すると、図12のステップ602において発生したような、FFTデータ曲線682の一例は、特定の検出範囲および1つ以上のFFTビンに対応する検出周波数690において、振幅検出ピーク686を含む。尚、単一のターゲットからの検出ピーク686は、単一のFFTビンよりも広い場合もあることは認められよう。前述のように、周波数ドメインにおいて検出したエコーの拡大(broadening)は、特定のFFTの特性(aspect)、即ち、FFTへの入力データ・サンプルに適用することができる重み関数に関係する。また、拡大は、特定のレーダ・ビームの軸に沿ったターゲットの寸法のような、エコーを発するターゲットの物理的特性(aspect)にも関係付けることができる。大きく広がったターゲット(extended target)は広い範囲を有し、したがってその距離に対応して広がった周波数として検出することもできる。
【0119】
一般に、単一のターゲットに対するFFT出力データ曲線682のピーク686は、ターゲットまでの距離に対応する周波数690である。しかしながら、図15および図16に関して、場合によっては、ピークはターゲットまでの距離の誤った印象を与える可能性があることがわかる。ここでは、FFT出力データ曲線のピークは、ターゲットまでの距離を示すと想定する。
【0120】
図12の検出アルゴリズム556に関連して説明したように、FFT周波数ビンは、特定の検出ゾーンに要求される要求精度を得る程十分に狭くすることができない場合もある。単一のターゲットからの検出信号が数個のFFTビン間に広がった場合、十分な距離分解能を得るためには、FFT出力データに対して追加の処理を行わなければならない。
【0121】
FFT出力曲線682の一次導関数694を検討することによって、FFT出力データ曲線682のピーク686が、負方向ゼロ交差698と一致することが解明された。つまり、一次導関数694の負方向ゼロ交差698から、FFTピーク686の周波数690が得られ、したがってターゲットまでの対応する距離が得られる。このように距離を検出すると、ピークが生じるFFT出力データ曲線682の端数周波数ビンを判定することによって単に距離を判定するよりも、精度を向上させることができる。なぜなら、ピークは多数のFFTビンにおいて生ずるからである。
【0122】
尚、図14Aおよび図14BはFFT出力データ曲線682およびFFT一次導関数694を滑らかな連続波形として示すが、FFT出力曲線682によって表されるFFT出力データ、および一次導関数694は、不連続なディジタル・サンプルで構成されている。その結果、一次導関数694のゼロ交差を求めるには、追加の処理が必要となる。一次導関数694の点の間隔が十分に狭い場合、隣接する一次導関数のデータ点はほぼ直線上に並ぶことになる。この近似を用いて、従来の三角法によってゼロ交差698を求めることができる。例示の実施形態では、データ点間の間隔は、約500Hzであれば十分であることがわかった。しかしながら、本発明では、他のデータ点周波数間隔も使用可能であることは、当業者には認められよう。尚、このように決定した一次導関数のゼロ交差698は、いずれの周波数でも可能であり、FFTビンの中心である必要はなく、したがって周波数分解能および関連する距離分解能は、FFTピーク686が生じる周波数を判定する従来の技法と比較して、大幅に改善されることを注記しておく。
【0123】
複雑な反射エコーでは、例えば、多数のターゲットからまたはビームの軸に沿って延びるターゲットからの場合、二次導関数706の負方向ゼロ交差を判定すれば、前述のように一次導関数を用いる場合よりも優れた距離判別を行うことができる。FFT出力データ曲線682の二次導関数706の負方向ゼロ交差702は、FFT出力データ曲線682の負屈曲点710に対応する。負屈曲点710は、FFT出力データ曲線682の傾きが上方カーブから下方カーブに変化する点である。
【0124】
尚、FFT出力データ特性(data feature)の上昇部分、例えば、714は離散負屈曲点710を有し、一方この特性のピーク686は周波数軸に沿って延長可能であることは認められよう。FFT出力データ特性の拡大は、入力サンプルの重み付けのようなFFTの数学的特性と、ターゲットの寸法特性との双方に関係付けられるが、FFT出力データ構造714の上昇部分は、一次までは(to a first order)FFTの数学的特性のみに関係する。FFT出力データ構造714の上昇部分上にある負屈曲点710を用いると、FFTピーク686の周波数を予測することができる。これは、ピーク686が明確ではない場合には望ましいであろう。要するに、ターゲット寸法の比較的広い範囲に対して、負屈曲点710とFFTピーク686との間の距離716は既知で一定であり、FFTの数学的特性のみによって決定される。したがって、FFT出力データ構造714の上昇部分の最初の負屈曲点710を見つけ、負屈曲点710を用いてピーク686の位置を予測することによって、更に複雑なFFT出力データ曲線のスペクトル形状に対しても、ターゲットまでの距離を求めることができる。
【0125】
図12におけるステップ606に関連して注記したが、個々のビーム照準角に対して特定的な閾値Rmin717およびTBeamRange718を、一次導関数または二次導関数テストのいずれかによって計算した、物体距離の周波数計算値に適用する。即ち、閾値以内にあるピークを有効と見なす。同様に、振幅閾値Tobject719よりも高いピークのみを有効と見なす。
【0126】
次に図15を参照すると、例として示す曲線728は、ほぼ平坦な上部FFT出力データ曲線が得られるようにビーム軸に沿って拡長したターゲットによって発生したFFT出力データに対応し、このデータ曲線のピークは、不定、即ち、多数のピーク724、732が得られる。一緒に示す曲線736は、拡長しないターゲットから得られたFFT出力データに対応する。FFT出力データ曲線728をFFT出力データ曲線736と比較することによって、負屈曲点720、740が一致することがわかる。このように、FFT出力データ曲線728の二次導関数を計算し、得られた負方向ゼロ交差を用いて、前述のように負屈曲点720および724間の既知の距離、即ち、周波数を加算することによって、ピーク724を決定すれば、高精度の距離判定が行える。
【0127】
次に図16を参照すると、FFT出力データの一例に対応する別の曲線744が示されている。この曲線は、2つのターゲットからのエコーの同時受信によって生ずると考えることができる。2つのターゲットの内、一方は他方よりも弱いとする。尚、強いエコーのために、弱いエコーに関連する複合FFT出力データ曲線744の曲線部分748はピークを全く有さず、一方強いターゲットからの曲線部分752は明確なピーク756を有することを注記しておく。その場合でも、複合FFT出力データ曲線744の二次導関数を計算することによって求められる負屈曲点760、764を用いて、双方のターゲットの距離を予測することができる。FFT出力データ曲線744の二次導関数の2つの負方向ゼロ交差の検出、および図14Aの距離716のような既知の距離の使用により、ピーク周波数点768および756を検出するに至る。第1の負屈曲点760を用いて、第1のターゲット距離に対応するピーク768を求めるが、ピーク768は実際には存在しない。同様に、第2の負屈曲点764を用いて第2のターゲット距離に対応するピーク756を求める。周波数ピークはターゲット距離に対応するので、強いターゲットおよび弱いターゲット双方までの距離を判別することができる。このように、FFT出力データの二次導関数を用いると、一層複雑なFFT出力データ曲線によって表されるターゲットについても、距離を判別することができる。
【0128】
次に図17Aおよび図17Bを参照すると、それぞれ、図11Aおよび図11Bと同様に、横方向検出ゾーン536、548の異なる例が2つ示されている。図17Aでは、台形状の最大検出ゾーン境界536が設けられている。図17Bでは、ほぼ矩形状の最大検出ゾーン境界548が設けられている。図17Aに示すように、例示のSODシステムは8つの方位方向ビーム540a〜540hを備え、斜線で示すように、各々異なる最大検出距離を有し、ビーム・エコーに対して動作する検出アルゴリズムによって判定される。図17Bに示すように、システムの一例は、8つの方位方向ビーム552a〜552hを備え、斜線で示すように、各々異なる最大検出距離を有する。距離552aから552hは、ビーム540a〜540hとは異なるため、この場合も斜線で示すように、実際に形成される最大検出ゾーン550は異なる。8つのビームの各々の最大検出距離のアルゴリズム制御は、指定された基準検出ゾーン境界536、548に対して、実際の最大検出ゾーン境界538、550を規定する。尚、本発明から逸脱することなく、別の数のビーム(例えば、8つよりも少ないまたは8つよりも多いビーム)や走査角も可能であることは、当業者には認められよう。個々の用途において用いられるアンテナ・ビームの特定の数は、前述のように、要求分解能および種々のその他の要因に応じて選択される。
【0129】
環境によっては、自動車のサイズや周辺視野の優先度等に基づいて、検出ゾーン536、548を変更することが望ましい場合もある。更に、例えば、検出ゾーンの変更をが必要な他の理由には、トレーラの曳航、車線サイズの変更、交通密度および個人的な好みが含まれる。図17Aに示すように、多数の狭いビーム、ここでは、ビーム540a〜540hを設け、ビーム長を調節することによって、検出ゾーン536の形状を変化させることができる。ビーム540a〜540hの各々の例として、ビーム540aを見ると、ビーム540aは複数の距離部分R1, R2,...R15, Rnを含み、その各々はセンサからの距離(レンジ)を示す。距離部分R1ないしRnの各々に、そして個々のビームに対する所望の距離に応じて対応する距離ビンを作成する。所望の距離ゲートに応じて、各距離ビンを検索(クエリー:query)することができる。尚、8つのビームの距離の各々はセンサ毎に変化しないことは認められよう。距離ゲートは、図21のステップ574に示すように、距離ゲートを制御するために用いられるソフトウエア命令を変更することによって変更することができる。可能なターゲット検出に対してビームの各々において検索する距離ビンを変更することによって、検出ゾーン536、548を可変とすることができる。再度図3を参照し、ターゲットが検出ゾーンにあるか否かの判定について、手短に説明する。ビデオ増幅器67からのビデオ信号は、ビーム毎に別個にA/D68に供給される。ランプ信号の各チャープの上部分、下部分およびCW部をA/D68からDSP30に供給する。各サンプルに、ウインドウ処理即ち振幅重み付けおよびゼロ・パディングを行う。各サンプルにFFTを実行し、スペクトルの判断基準にしたがってサンプルの信号が閾値よりも高いときにターゲットを検出する。前述のように、距離(レンジ)および距離レート(range rate)データを格納する。検出要件に応じて、上方または下方ランプ生データを用いて、時間を前進または逆進させたり、あるいはターゲットを空間的にずらすことが望ましい場合もあり、検出される各ターゲットはある距離、または、例えば、FFT、ビンと関連付けられる。次に、ターゲットが警報ゾーン内にあるか否か判定し、ターゲットが警報ゾーンにおいて検出された場合、信号を活性化し、検出エリア内におけるターゲットの存在を示す。ビーム毎に各距離ビンをゾーン境界の内部または外部のいずれかに割り当て、ターゲットの存在を判定するために当該距離ビンを検索するか否か判定を行う。尚、ソフトウエア命令を変更することによって、割り当てた境界をビーム毎に範囲内外に移動させ、警報ゾーンのサイズおよび形状を個別に作成できることは認められよう。このような構成では、ハードウエアを変更することなく、種々の検出ゾーンを設けることができる。
【0130】
検出ゾーン536によって設けられるカバレッジ・エリアでは、ビーム540aの距離ビンR1〜R6またはビーム540bの距離ビンR1〜R6において何らかのターゲットが検出されると、陽性を示す警報が発生することは、今や認められて当然であろう。検出ゾーン548によって設けられるカバレッジ・エリアでは、ビーム552aの距離ビンR1〜R6またはビーム552bの距離ビンR1〜R7において何らかのターゲットが検出されると、陽性を示す警報が発生する。尚、図面における簡略化のために、ビームにおける距離ビンの数は図に示すものよりも多いことは認められよう。
【0131】
次に図18を参照すると、ビーム毎に距離および距離レート・ビンのグラフ表示が示されている。これらのデータはこうしてメモリに格納される。各ビームは、対応する距離および距離レート・ビンを有し、ターゲットの存在を示す。図示したグラフでは、ビーム1に対して、距離ビン1ないし6が活性化され、ビーム2に対して距離ビン1ないし7が活性化され、ビーム3に対して距離ビン1ないし8が活性化され、ビーム4に対して距離ビン1ないし9が活性化され、ビーム5に対して距離ビン1ないし9が活性化され、ビーム6に対して距離ビン1ないし9が活性化され、ビーム7に対して距離ビン1ないし7が活性化され、ビーム8に対して距離ビン1ないし7が活性化される。各距離ビンに対して、当該距離ビンに可能な種々の距離レートに対応する、付加的にさまざまな距離レート・ビンがある。後者は、必要に応じて、検出ゾーンに対してある程度のカバレッジを設ける。異なる検出ゾーンが望ましい場合、異なる距離ビンを活性化し、検索してターゲットの存在を検出する。
【0132】
次に図19を参照すると、図3のDSP30のようなSODプロセッサによって実行するプロセス700のフロー図を示す。プロセス700は、検出ゾーンを規定するためにビーム毎に距離閾値を設定するステップを含む。最初に、ステップ702で示すように、検出カバレッジ・エリアの選択を行う。後者は、アラーム信号によってカバーされるセンサ周囲のカバレッジ・ゾーンを決定する。次に、ステップ704に示すように、アンテナ・ビームから1つを選択する。ステップ706において、選択したアンテナ・ビームによってカバーされる距離を選択する。この際、どの距離ビンを検索し、どの距離ビンを無視するか判定を行う。ステップ708において、アンテナ・ビームの全てが、各ビームに選択した距離ゲート値を有するか否か判定を行う。有していない場合、処理はステップ704に戻り、別のビームを選択する。ビームを全て処理し終えたなら、処理は別のルーチンに戻り、このサブルーチンを終了する。
【0133】
尚、図12のステップ574において、距離閾値を各ビーム照準角毎に確定し、検出ゾーンを規定することは認められよう。つまり、所与のビーム照準角において、SODシステムに対して遠すぎるまたは近すぎるため検出ゾーンに入らない距離検出を、予め確定してある距離閾値によって排除する。処理ステップ700は、ステップ574に含ませることができ、あるいは処理ステップ700を予め実行しておき、処理ステップ700の結果をメモリに格納し後にステップ574で用いることもできる。
【0134】
尚、図19に示すフローチャートは、レーダ・システム10(図1)において実施し、先に検討した技法に対応することは認められよう。矩形エレメント(図19のエレメント702で代表する。ここでは「処理ブロック」と呼ぶ)は、コンピュータのソフトウエア命令または命令群を表す。菱形のエレメント(図19のエレメント712で代表する。ここでは「判断ブロック」と呼ぶ)は、処理ブロックによって表されるコンピュータ・ソフトウエア命令の実行に作用する、コンピュータ・ソフトウエア命令または命令群を表す。
【0135】
あるいは、処理ブロックおよび判断ブロックは、ディジタル信号プロセッサ回路や特定用途集積回路(ASIC)のような機能的に等価な回路によって実行されるステップを表す。フロー図は、断じて特定のプログラム言語のシンタックスを示すのではない。むしろ、フロー図は、当業者が個々の装置に必要な処理を実行するための回路を製造したり、あるいはコンピュータ・ソフトウエアを生成する際に必要となる機能情報を示す。尚、ループや変数の初期化および一時変数の使用というような多くの慣例的プログラム・エレメントは示されていないことを注記しておく。ここでは、特に指示しない限り、記載する特定のステップ・シーケンスは例示に過ぎず、本発明の精神から逸脱することなく変更可能であることは、当業者には認められよう。したがって、特に明記しない限り、以下に説明するステップは、可能であれば、好都合な順序または所望の順序のいずれでもステップを実行可能である点において、順序は不問であることを意味する。
【0136】
本発明では、別のビーム数および距離ビン数も可能であることは当業者には認められようが、明確化のために、8つのビームおよびビーム当たり16個の距離ビンを用いて本プロセスを説明した。更に、用途によっては、アンテナ・ビーム全てを用いるのではなく、あるアンテナ・ビームは選択せずに、複数のアンテナ・ビームの一部のみを用いて検出カバレッジ・エリアを設ける方が望ましい場合もある。ここでは8つのビームについて説明したが、8つよりも多いビームまたは少ないビームも使用可能であることは言うまでもない。例えば、7つのビームを用いることができる。7つのビームを供給するアンテナ・システムの一例が、本願と同一日に出願し、「Switched Beam Antenna Architecture」(切換ビーム・アンテナ・アーキテクチャ)と題する同時係属中の特許出願第09/XXX,XXX号に記載されている。この出願は、本発明の授受人に譲渡され、その内容はこの言及により全体的に本願にも援用されるものとする。
【0137】
以上本発明の好適な実施形態について説明したが、その概念を組み込んだ別の実施形態も使用可能であることは、当業者には今や明白であろう。
【0138】
レーダ・システムの部分間の個々の境界は、先に説明したものから変更可能であることは、当業者には認められよう。一例として、受信機は、A/D変換器のように、電子制御回路の一部、または受信機の一部を含むこともでき、システムの電子装置部に設けることもできる。選択した種々の構成部品の実施態様に応じて、レーダ・システムの1つ以上の部分を1つ以上のハイブリッド回路、モジュール、またはサブアセンブリ上に統合することもできる。したがって、これらの実施形態は開示した実施形態に限定されるものではなく、特許請求の範囲の精神および範囲によってのみ限定されるべきである。この中で引用した全ての刊行物および文献は、その言及により、その全体が本願にも明白に含まれることとする。
【技術分野】
【0001】
本発明は、一般的には、輸送手段(車両)用レーダ・システムに関し、更に特定すれば、車両に近接する別の車両や物体を検出するレーダ・システムに関する。
【背景技術】
【0002】
当技術分野では公知であるが、自動車やボートのような車両(輸送手段)に関連する種々の用途のために、レーダ・システムが開発されている。車両に搭載したレーダ・システムは、当該車両付近にある別の車両を含む物体の存在を検出する。自動車の用途では、このようなレーダ・システムは、制動(ブレーキ)システムと共に用いて能動的衝突回避を行ったり、自動車用クルーズ(巡航)制御システムと共に用いてインテリジェントな速度および交通間隔制御を行うことができる。更に別の自動車の用途では、レーダ・システムは、ドライバに対して受動的障害指示をディスプレイ上に与える。
【0003】
自動車の運転における安全性に対する以前からの懸念の1つに、自動車の横方向盲点(side blind spot)における物体検知の困難さがある。事故が発生するのは、多くの場合、自動車が車線変更時にその盲点において別の車両と衝突するときである。
【0004】
通例では、種々のサイズおよび構造のバックミラーやサイド・ミラーを用いて、盲点の視認性(視覚化)を改善すべく努めている。例えば、凹状ミラーは平面ミラーよりも視野が広い。しかしながら、凹状ミラーにおいて見える物体は、車両からのそれらの実際の距離よりもはるか遠くに見える。また、雨天、降雪、または暗がりという条件下では、ミラーを通じての視覚は低下する。
【0005】
雨天、降雪、および暗がりを含むあらゆる種類の環境条件下においても高精度かつ信頼性高く、車両の盲点における物体、一般的には車両に近接する物体を検出する有効な方法が求められている。有効な検出システムの別の特徴は、検出ゾーンが明確に規定されており、その内部における検出確率が非常に高く、その外部では検出確率が非常に低いことである。
【0006】
当技術分野では公知であるが、多くの種類のレーダ伝送技術があり、その1つに周波数変調連続波(FMCW:frequency modulated continuous wave)伝送がある。FMCW伝送では、送信信号の周波数が、第1所定周波数から第2所定周波数に線形に増加する。FMCWレーダには、感度が高く、送信電力が比較的低く、距離分解能が高いという利点がある。
【0007】
FMCW伝送信号を発生するには、種々の回路および技法を用いることができる。一技法では、ランプ(傾斜)特性を有する信号電圧(ここでは、「ランプ信号」またはランプ電圧」と呼ぶ)を電圧制御発振器(VCO)に供給し、周波数変調送信信号を発生する。この信号のことを、一般にチャープ信号(chirp signal)と呼ぶ。通例では、ランプ信号は、アナログ回路によって発生する。このアナログ回路は、タイミング・パルス発生回路、積分器、および増幅器を含むことがある。このようなアナログ回路の構成素子は、設計段階において固定されてしまうので、このような回路の多様性は、あるにしても、さほど高くない。
【0008】
理想的には、VCO出力信号の周波数は、ランプ電圧に対して線形に変化する。ランプ信号および/またはVCOの動作に非線形性があると、RF戻り(反射)信号の周波数はRF周波数範囲全域に拡散する可能性があり、即ち、「スメア(不鮮明)になる」可能性があり、このため、レーダ・システムのターゲット検出、分解能、および距離精度性能が低下する。
【0009】
FMCW伝送信号を発生するには、直接ディジタル合成(DDS:direct-digital synthesis)を用い、送信信号自体をディジタル的に合成するという別の技法がある。典型的なDDSシステムは、位相アキュムレータ(累算器)およびディジタルーアナログ(D/A)変換器を含む。しかしながら、送信信号レートは、ナイキストの定理によって、D/A変換器の最大クロック・レートの半分に制限されてしまう。DDSシステムの別の欠点には、複雑さおよびコスト、それに加えて、現在入手可能なDDS合成器の動作周波数およびチューニング(同調)範囲の制限のために、それを補う必要性によるハードウエア増加が含まれる。
【0010】
また、周知の通り、比較的複雑なレーダ・システムでは、多数の送受信(送信および受信)回路(TRC:transmit and receive circuit)が含まれ、その各々が互いに独立して動作する。このような送受信回路が互いに接近して配され、同一または重複する周波数で動作すると、多数のTRCが互いに干渉し合い、ターゲットの精度高い検出が妨げられる。また、多数のTRCの同時動作によって、別の問題も起こり得る。
【0011】
レーダ・システムには、数々の設計上の課題がある。一例として、同じまたは重複する周波数で動作するレーダ・システムが互いに接近して用いられると、2つのシステムは互いに干渉し合い、ターゲットの精度高い検出が妨げられる。例えば、温度変化に伴う回路性能のばらつきの結果、多数のTRC間で干渉が起こる可能性がある。したがって、比較的簡単に送信信号特性の調節ができるレーダ送信回路を提供することができれば、望ましいであろう。また、レーダ送信機を配置した環境における温度のばらつきによって生ずる、送信信号特性のばらつきを補償するレーダ送信機を提供することができれば、望ましいであろう。更に、非線形VCO動作を補償するFMCWレーダ・システムを提供することができれば、望ましいであろう。更にまた、重複する周波数範囲において多数のTRCの同時動作を可能にする技法を提供することができれば、望ましいであろう。更にまた、多数のFMCW TRCの同時動作を可能とし、レーダ・カバレッジ(radar coverage)の変更が可能なシステムおよび技法を提供することができれば、望ましいであろう。
【発明の概要】
【課題を解決するための手段】
【0012】
レーダ・システムを用いて物体を検出する方法は、送信信号を送信するステップと、物体に衝突した送信信号の少なくとも一部によって発生した受信信号を受信するステップと、送信信号および受信信号に応答して差信号を計算するステップと、差信号に対してFFTを実行しFFT出力信号を得るステップと、FFT出力信号の導関数を計算するステップと、FFT出力信号の導関数のゼロ交差に応答して物体を検出するステップとを含む。物体までの距離は、FFT出力信号の導関数のゼロ交差が発生した周波数によって決定する。一実施形態では、導関数は二次導関数である。
【0013】
また、レーダ・システムを用いて物体を検出するもう1つの方法についても記載する。この方法は、複数の指標を収容した検出表を生成することを含み、各指標は、レーダ・システムに近接する物体の有無を示す。各指標には、それぞれのレーダ・ビームおよび処理サイクルが関連付けられている。この方法は、更に、指標の内少なくとも2つを組み合わせるステップと、組み合わせた指標の内少なくとも1つが物体の存在を示す場合、物体の検出を行うステップを含む。例示の実施形態では、組み合わせた指標は、異なるレーダ・ビームおよび/または異なる処理サイクルと関連付けられている。この技法を用いると、レーダ・システムに近接する物体が高い確率で検出され、検出した物体までの距離も高い精度で判定される。検出表(テーブル)を用いることによって、この方法は、偽検出の確率を低下させる。FFT出力信号の導関数、更に特定すれば、二次導関数を用いることによって、これまでは未検出となる虞れがあった物体が検出可能となる。
【0014】
物体を検出するレーダ・システムは、送信信号を送信する送信機と、物体に衝突した送信信号の少なくとも一部によって発生した受信信号を受信する受信機と、送信信号および受信信号に応答して差信号を計算する減算回路と、差信号にFFTを実行しFFT出力信号を得るFFTプロセッサと、FFT出力信号の導関数を計算する導関数プロセッサと、FFT出力信号の導関数のゼロ交差に応答して物体を検出する検出器とを含む。更に、検出器は、導関数のゼロ交差が発生する周波数に応答して、物体までの距離を判定することができる。
【0015】
レーダ装置は、複数の指標を収容する検出表を格納したメモリを含む。各指標は、物体の有無を示す。検出表における指標の内少なくとも2つを組み合わせ、組み合わせた指標の少なくとも1つが物体の存在を示す場合、物体検出メッセージ(情報)を与えるプロセッサが設けられている。
【0016】
前述の検出技法と同様、レーダ装置は、高い確率で、レーダ・システムに近接する物体を信頼性高く検出し、高い精度で物体までの距離を判定する。
【0017】
本発明によれば、レーダ送信機は、DSPと、DSPの出力端子に結合された入力端子とアナログ・ランプ信号を供給する出力端子とを有するD/A変換器と、アナログ・ランプ信号に応答する入力端子と周波数変調信号を供給する出力端子とを有するVCOとを含む。この構成により、単純で比較的安価な回路を用いて、VCOを制御するアナログ・ランプ信号を発生する。DSP出力ワードを適切に調節しこれに付随するチャープ信号の調節により、様々な有利な特徴を容易に実施することができる。これらの特徴には、VCOおよび駆動回路の温度補償、非線形VCO動作の補償、および干渉低減技法が含まれる。D/A変換器の出力端子とVCOの入力端子との間にアナログ平滑化回路を結合すると、階段状のD/A変換器出力を平滑化することができる。
【0018】
一実施形態では、VCOの出力をアップコンバートして送信信号を供給し、別の実施形態では、VCOが送信信号周波数範囲全域で動作することによって、アップコンバータの必要性をなくする。また、誘電体共振発振器(DRO:dielectric resonator oscillator)を含みチャープ信号を発生するVCOについても記載する。このVCOは、増幅器と、VCOの中心周波数を制御する誘電体共振器と、VCOの周波数同調機能を設ける移相器とを含む。移相器は、三端子デバイスであり、増幅器に結合された入力と、誘電体共振器に接続された出力端子とを有する。誘電体共振器は、増幅器の入力に戻って接続され、正フィードバックを行うことにより、発振器を構成する。加えて、移相器は、制御端子を有し、制御電圧に比例する移相を行うことによって、VCOの周波数を制御する。周波数変調信号即ち「ランプ信号」を制御端子に結合し、ランプ信号に応答するようにする。
【0019】
周波数補償機能について説明すると、これは、所定のディジタル・ワード・シーケンスからこのワード・シーケンスのそれぞれに関連する周波数を有する送信信号を発生するステップと、予測送信信号周波数に関連付けてディジタル・ワードの各々を格納するステップとを含む。送信信号の実際の周波数を検出し、この検出した周波数を発生するのに用いたディジタル・ワードを、実際の送信信号周波数に関連付けて格納したディジタル・ワードと比較する。比較の結果は、誤差値となり、ディジタル・ワードの各々を調節する際に用いられる。一実施形態では、実際の送信信号周波数を検出するには、狭い周波数帯域に応答する回路を用い、誤差値に等しいオフセットを導入することによって、ディジタル・ワードを調節する。一実施形態では、この回路は、送信信号周波数を有する信号に応答するDROとして設けられる。
【0020】
非線形DRO動作を補償する方法によれば、製造中に、所定のディジタル・ワード・シーケンスをD/A変換器に印加し、ワード毎に得られる送信信号周波数を検出することによって、VCOを特徴化する。このプロセスによって、VCO出力周波数をVCO入力電圧に関係付ける、いわゆるVCO曲線が得られる。VCO曲線の形状と相補的な形状を有する曲線を決定し、DSP出力ワードを調節して、相補波形をVCOに供給する。その特性曲線に関して相補的な波形でVCOを制御することによって、このような非線形動作に起因する周波数の不明瞭さ(smear)を低減する。
【0021】
レーダ・システム間の干渉を低減する方法は、VCOを制御するランプ信号を発生するステップと、このランプ信号の少なくとも1つのパラメータをランダムに変化させるステップとを含む。ランプ信号は、複数のサイクルを含み、その各々がオフセット部と、ランプ部と、CW部とを有する。ランプ信号のパラメータは、1つ以上のサイクルにおいてランダムに変化させることができる。ランダムに変化させることができるランプ信号パラメータの一例には、開始ランプ信号電圧、オフセット部の期間、およびランプ部の電圧範囲が含まれる。
【0022】
レーダの動作方法は、検出カバレッジ・エリアを選択するステップと、選択したカバレッジ・エリアに応答して、複数のアンテナ・ビームから1つを選択するステップと、選択したカバレッジ・エリアに応答して、複数のアンテナ・ビームから選択した1つがカバーする範囲を選択するステップとを含む。このような技法では、アンテナ・ビームがカバーする範囲を変化させることができる。
【0023】
本発明の別の特徴によれば、前述の方法は、更に、選択したカバレッジ・エリアに応答して、複数のアンテナ・ビームから1つを選択するステップと、選択したカバレッジ・エリアに応答して、複数のアンテナ・ビームから選択した1つがカバーする範囲を選択するステップとを、複数のアンテナ・ビームを1つずつ選択し終えるまで、繰り返すステップを含む。このような技法では、複数のアンテナ・ビームの各々に規定した範囲を変化させ、レーダ・システムのカバレッジを規定することができる。環境によっては、後者では、自動車のサイズ、周辺視野の優先度またはその他の要因に基づいて、検出ゾーンを変化させることができる。
【0024】
本発明の前述の特徴、および本発明自体は、以下の図面と関連した説明から一層深く理解することができよう。
【図面の簡単な説明】
【0025】
【図1】図1は、レーダ・システムのブロック図である。
【図2】図2は、図1に示す形式のレーダ・システムを複数個含む自動車用近接物体検出(NOD)システムのブロック図である。
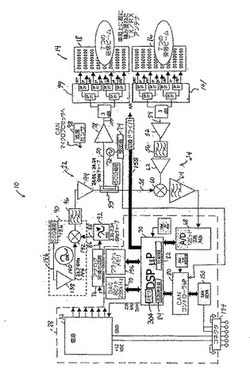
【図3】図3は、図2のNODシステムにおいて用いる横方向物体検出(SOD)システムの詳細ブロック図である。
【図4】図4は、温度補償機構を実施するために図3のランプ発生器によって生成するVCO制御信号波形を示す、VCO制御信号電圧対時間のプロットである。
【図5】図5は、干渉低減機構を実施するために図3のランプ発生器によって生成する別のVCO制御信号波形を示す、VCO制御信号電圧対時間のプロットである。
【0026】
図5Aは、別の干渉低減機構を実施するために図3のランプ発生器によって生成する更に別のVCO制御信号波形を示す、VCO制御信号電圧対時間のプロットである。
【図6】図6は、図3のVCO出力信号の周波数と図3のVCO制御信号の電圧との間にある非線形性関係を示す、VCO制御信号電圧対時間のプロットである。
【0027】
図6Aは、VCO制御信号と、図6の非線形VCO特性を補償するために用いられる図3のDSPの出力との間にある関係を示す、VCO制御信号電圧対時間のプロットである。
【図7】図7は、別のSODシステムの実施形態を詳細に示すブロック図である。
【図8】図8は、更に別のSODシステムの実施形態を詳細に示すブロック図である。
【図9】図9は、図3、図7、および図8のDSPのアーキテクチャを例示するブロック図である。
【図10】図10は、車両に配置されたSODシステムが設ける検出ゾーンの一例の概略図である。
【図11】図11Aは、SODシステムによって設けることができる別の検出ゾーンの概略図である。
【0028】
図11Bは、SODシステムによって設けることができる別の検出ゾーンの概略図である。
【図12】図12は、検出ゾーン内部で物体を検出するためにSODシステムによって実施するプロセスを示すフロー・チャートである。
【図13】図13は、図12のプロセスに含まれる副サイクル検出プロセスのタイミング・チャートである。
【図14】図14Aは、図12の検出プロセスの中間段階において発生する出力を示す、信号戻り高速フーリエ変換(FFT)振幅対FFT周波数ビンのプロットである。
【0029】
図14Bは、図12の検出プロセスの別の中間段階におい計算した、図14AのFFT出力の一次導関数および二次導関数を示す、FFT導関数振幅対FFT周波数ビンのプロットである。
【図15】図15は、地理的に拡張したターゲットの検出によって得られるFFT出力の一例、および同じ距離における拡張しないターゲットの検出によって得られるFFT出力の一例を示す、信号戻りFFT振幅対FFT周波数ビンのプロットである。
【図16】図16は、2つの近接したターゲットの検出に伴うFFT出力の一例を示す、信号戻りFFT振幅対FFT周波数ビンのプロットである。
【図17】図17Aおよび図17Bは、SODシステムによって設けることができる検出ゾーンにおける種々の距離選択肢の概略図である。
【図18】図18は、ビーム毎の距離および距離率ビンをメモリに格納した場合のグラフ表示である。
【図19】図19は、検出ゾーンにおいて距離を変更するために、SODシステムによって実施するプロセスを示すフロー・チャートである。
【発明を実施するための形態】
【0030】
発明の詳細な説明
図1および図1Aを参照すると、レーダ・システム10は、アンテナ部14と、送信機22および受信機24双方を有するマイクロ波部20と、ディジタル信号プロセッサ(DSP:digital signal processor)30、電源32、制御回路34およびディジタル・インターフェース・ユニット(DIU:digital interface unit)36を備えた電子回路部28とを含む。送信機22は、電圧制御発振器(VCO)の制御信号を発生するディジタル・ランプ信号発生器を含む。これについては、以下で説明する。
【0031】
レーダ・システム10は、レーダ技術を利用して、システム10の視野内において1つ以上の物体、即ち、ターゲットを検出し、種々の用途に用いることができる。例示の実施形態では、レーダ・システム10は輸送手段(自動車)用レーダ・システム(図2)のモジュールであり、具体的には、側方(横方向)物体検出(SOD:side object detection)モジュールまたはシステムであり、自動車またはその他の車両40上に搭載するように構成され、物体を検出することを目的とする。物体には、限定する訳ではないが、別の車両、木々、標識、歩行者、および車両が位置する経路に近接して位置する可能性がある他の物体が含まれる。当業者には明白であろうが、レーダ・システム10は、多くの異なる種類の用途において用いるのにも適している。その用途には、海洋分野が含まれ、レーダ・システム10はボート、船、またはその他の船舶上に配置することができるが、それらに限定される訳ではない。
【0032】
送信機22は、周波数変調連続波(FMCW)レーダとして動作し、送信信号の周波数は、第1所定周波数から第2所定周波数まで線形に増加する。FMCWレーダには、感度が高く、送信電力が比較的低く、距離分解能が高いという利点がある。しかしながら、他の種類の送信機も使用可能であることは認められよう。
【0033】
制御信号バス42を通じて車両40からレーダ・システム10に制御信号を供給する。DSP30は、これらの制御信号、およびレーダ・システム10が受信したレーダ反射信号を処理し、レーダ・システムの視野内部において物体を検出する。これについては、図10ないし図16に関連付けて以下で説明する。レーダ・システム10は、出力信号バス46を通じて、その視野内部にある物体を特徴付ける1つ以上の出力信号を車両に供給する。これらの出力信号は、予め設定したシステムの閾値をターゲットが超過したときの、ターゲット検出信号を含むことができる。出力信号は、車両40の制御ユニットに結合され、盲点および近接物体検出のように、様々に使用することができる。
【0034】
アンテナ・アセンブリ14は、RF信号を受信する受信アンテナ16と、RF信号を送信する送信アンテナ18とを含む。レーダ・システム10は、バイスタティック・レーダ・システム(bistatic radar system)としてその特性を表すことができる。何故なら、これは、互いに近接して位置する別個の送信アンテナおよび受信アンテナを含むからである。アンテナ16、18は、ステアリング角において多数のビームを生成する。ステアリング角の制御は、同じ方向で送信ビームおよび受信ビームに照準を当てる(point)ように、平行に行う。それぞれのアンテナ16、18の角度を選択するには、多重位置送信および受信アンテナ・スイッチを含む様々の相応しい回路がある。
【0035】
図2も参照すると、図1のレーダ・システム10の応用例が、自動車用近接物体検出(NOD:near object detection)システム100の形態で示されている。NODシステム100は、車両(輸送手段)120上に配置されている。車両120は、例えば、自動車、オートバイ、またはトラックのような自動車両、ボートのような海洋車両または水中車両、あるいは刈り取り機のような農業車両として設けることができる。この特定的な実施形態では、NODシステム100は、前方監視センサ(FLS:forward-looking sensor)システム122、光電センサ(EOS:electro optic sensor)システム124、複数の側方(横方向)監視視センサ(SLS:side-looking sensor)システム128または同等の横方向物体検出(SOD:side object detection)システム128、および複数の後方監視センサ(RLS:rear-looking sensor)システム130を含む。例示の実施形態では、図1のレーダ・システム10はSODシステム128であり、図3に更に詳細に示す。
【0036】
FLS、EOS、SLS、およびRSLシステムの各々は、センサ・プロセッサ134に結合されている。この特定的な実施形態では、センサ・プロセッサ134は、中央プロセッサとして示されており、FLS、EOS、SLS、およびRLSシステムの各々がバスまたはその他の手段を通じてこれに結合されている。尚、別の実施形態では、FLS、EOS、SLS、およびRLSシステムの内1つ以上が、図1のDSP30のような、それ自体のプロセッサを含み、以下で説明する処理を行うようにしてもよいことは認められよう。この場合、NODシステム100は、分散プロセッサ・システムとして設けられる。
【0037】
NODシステム100が含むプロセッサが1つかまたは多数かには係わらず、センサ・システム122、124、128、130の各々によって収集した情報は共有され、プロセッサ134(または分散システムの場合は複数のプロセッサ)は判断ツリー即ち規則ツリーを形成する。NODシステム100は、盲点検出、車線変更検出、車両のエア・バック作動準備を含み、これらには限定されない多数の機能のために用いられ、車線停留(持続)機能を実行することができる。例えば、センサ・プロセッサ134を車両132のエアバッグ・システムに結合することができる。FLS、EOS、SLS、およびRLSシステムの内1つ以上からの信号に応答して、センサ・プロセッサは、車両のエアバッグを「準備」(pre-arm)するのに適した時期を判断することができる。別の例も可能である。
【0038】
EOSシステム124は、光センサ即ちIRセンサ、あるいはセンサの方位面において比較的高い分解能を有する別のいずれかのセンサを含む。1対のRLSシステム130は、三角測量方式を利用して、車両の後部にある物体を検出することができる。FLSシステム122は、1999年7月27日に発行された、「Automotive Forward Looking Sensor Architecture」(自動車用前方監視センサ・アーキテクチャ)と題する米国特許第5,929,802号に記載されている。この特許は、本発明の譲受人に譲渡され、その内容はこの言及により本願にも援用されるものとする。尚、SLSおよびRLSセンサの各々は、同じアンテナ・システムを有するように設けてもよいことは認められよう。
【0039】
センサ・システムの各々は、複数のカバレッジ・ゾーンが車両周囲に存在するように、車両120上に配置されている。したがって、車両は、センサ・ゾーンの繭のような網または覆い内に包囲されている。図2に示す特定的な構成では、4つのカバレッジ・ゾーン68a〜68dが用いられている。カバレッジ・ゾーン68a〜68dの各々は、1つ以上のRF検出システムを利用する。RF検出システムは、カバレッジ・ゾーン68a〜68dの各々において多数のビームを供給する、アンテナ・システムを利用する。このように、別の物体が車両に接近する特定の方向、または車両が別の物体に接近する特定の方向を発見することができる。使用可能な具体的なアンテナの1つが、2001年8月16日に出願され「Slot Antenna Element for an Array Antenna」(アレイ・アンテナ用スロット・アンテナ・エレメント)と題する米国特許出願第09/ 号、および2001年8月16日に出願され「Switched Beam Antenna Architecture」(切換ビーム・アンテナ・アーキテクチャ)と題する米国特許出願第09/ 号に記載されている。これらの各々は、本発明の譲受人に譲渡されており、その内容はこの言及により本願にも援用されるものとする。
【0040】
尚、SLR、RSL、およびFLSシステムは、車両上に着脱可能に展開可能であることは認められよう。即ち、実施形態によっては、SLS、RLS、およびFLSセンサを車両の本体外部に配置する場合もあり(即ち、車両本体の露出面上に配置する)、一方別のシステムでは、SLS、RLS、およびFLSセンサをバンパやその他の車両の部分に埋め込む場合もある(例えば、ドア、パネル、クオータ・パネル、車両の前端、および車両の後端)。また、車両内部(例えば、バンパ内またはその他の場所)に搭載し、しかも着脱可能なシステムを設けることも可能である。搭載するシステムは、2001年8月16日に出願され「System and Technique for Mounting a Radar System on a Vehicle」(レーダ・システムを車両上に搭載するシステムおよび技法)と題する米国特許出願第09/ 号、および2001年8月16日に出願され「Portable Object Detection System」(携帯物体検出システム)と題する米国特許出願第09/ 号に記載されているような形式とすることができる。これらの各々は、本発明の譲受人に譲渡されており、その内容はこの言及により本願にも援用されるものとする。
【0041】
図3も参照すると、SODシステム128(図2)として用いる図1のレーダ・システム10が、更に詳しく示されている。送信機22の動作に関する概略的な全体像では、FMCWレーダは、経時的に所定の態様で変化する周波数を有する信号50を送信する。送信信号50を供給するには、通常、VCO制御信号即ちランプ信号86を電圧制御発振器(VCO)92に入力する。ランプ信号86に応答して、VCO92はチャープ信号88を発生する。
【0042】
RF信号の送信時間の尺度は、受信信号54の周波数を送信信号のサンプル58の周波数と比較することによって判定することができる。したがって、距離の判定は、送信信号のサンプル58および反射信号54の周波数間のビート周波数を測定することによって行われる。ビート周波数は、ランプ信号86の傾きに反射信号の時間遅延を乗算した値に等しい。測定した周波数は、更に、ターゲットおよびレーダ・システム間の相対速度によるドプラ周波数を含む。測定周波数のずれに対する2つの寄与を分離し特定するために、線形ランプ信号の形態で制御信号86をVCO92に供給し、続いて傾きが逆のCW信号またはランプを供給することによって、送信信号50の時間可変周波数を得る。
【0043】
本発明の一態様によれば、VCO制御信号86を発生するには、ディジタル回路および技法を用いる。好適な実施形態では、ランプ信号86は、DSP30およびディジタルーアナログ変換器(DAC)70によって発生する。DSP30およびDAC70を用いてランプ信号96を発生することは、SODシステム10では可能である。何故なら、本発明によれば、検出ゾーン特性の適正な選択によって、チャープ信号88の正確な線形性は不要であると判断されているからである。尚、検出ゾーン特性には、検出ゾーンのサイズ、形状および分解能を含むが、これらに限定される訳ではない。これは、近接距離における送信波形および受信波形間の非線形性に存在する相関の結果である。この構成では、送信信号50の周波数が精度高くしかも容易に制御することができ、いくつかの構造の実現促進が図られる。一例として、ランプ信86における連続ランプの1つ以上の特性をランダムに変化させ、類似する近接レーダ・システム間の干渉を低減する。これを図5および図5Aに示す。別の例として、ランプ信号86を適切に調節することによって、温度補償を実施する。これについては、図4と関連付けて説明する。更に別の例は、図6および図6Aに示すような、VCO動作における非線形性の補償である。更に、SODシステム10の変更は、通常であればハードウエアの変更または調節が必要となるが、単にソフトウエアをDSP30にダウンロードすることにより、容易に行うことができる。例えば、SODシステム10の動作の周波数帯域を容易に変更することができる。これは、動作周波数要件が異なる色々な国でSODを用いる場合に望ましいであろう。
【0044】
図3におけるSODシステム10の電子装置部28は、DSP30、電源32、およびコネクタ154を含み、コネクタ154を介して、SODシステム10と車両40(図1)との間で信号バス42、46(図1)が結合されている。図3におけるコントローラ・エリア・ネットワーク(CAN)送受信機(XCVR)150の形態でディジタル・インターフェース36が設けられており、CANマイクロコントローラ80を介してDSP30に結合されている。周波数の安定化を図るために、CANコントローラ80にはシステム・クロックが結合されている。一実施形態では、システム・クロックは水晶制御発振器として設けられる。アナログーディジタル(A/D)変換器68がビデオ増幅器64の出力を受け、この信号をディジタル形態に変換し、DSP30に結合して検出処理を行う。一実施形態では、A/D変換器68は12ビットA/D変換器として設けられる。しかしながら、個々の用途に対して十分な分解能を有するのであれば、いずれのA/D変換器でも使用可能であることを当業者は認めよう。ディジタル信号バス158がアンテナ切換ドライバ回路103に結合されており、これがマイクロ波スイッチ99、101を制御し、制御信号をマイクロ波スイッチに供給して、アンテナのステアリングを制御する。また、SODシステム10の電子装置部28には、メモリ156も設けられており、その中にソフトウエア命令、即ち、コードおよびデータが格納されている。図3および図7に示す実施形態では、メモリはフラッシュ・メモリ156として設けられている。
【0045】
DSP30は、ディジタル・ランプ出力信号、即ち、ワードをDAC70に供給し、DAC70はランプ・ワードをそれぞれのアナログ信号に変換する。アナログ平滑化回路76がDAC70の出力に結合されており、階段状のDAC出力を平滑化して、ランプ制御信号86をVCO92に供給する。DSP30は、メモリ・デバイス304(図9)を含み、この中に、1組のDSP出力信号、即ち、ワードを収容したルックアップ・テーブル(参照テーブル)が、それぞれのDSP出力信号によって発生される送信信号50の周波数と関連付けて格納されている。このデータは、システムの初期起動の間に、フラッシュ・メモリ156からRAM304に転送される。このデータは、ここに記載するような温度の影響の結果として、適宜補正することができる。例示の実施形態では、VCO92は、カリフォルニア州San DiegoのZ Communications, Inc.が供給するSMW2488デバイスであり、VCO出力信号88は、2.31ないし2.54GHzの範囲の周波数を有する。図7および図8のSODの実施形態は、送信信号を発生する別のVCO構成を示す。
【0046】
図示の自動車用NODシステム100における必要性に応じて、アップコンバータ回路90が、VCO出力信号88をアップコンバートして周波数を高める。即ち、信号88を24.01ないし24.24GHzの間の周波数にアップコンバートする。アップコンバータ90は、50オームの負荷136と、増幅器138と、誘電体共振器(DR)140と、ミキサ142とを含む。増幅器138、誘電体共振器(DR)および伝送線144、146が発振回路を形成し、DR140がその基本周波数において、そして伝送線144から伝送線146までのその通過帯域内においてエネルギを結合し、発振信号を発生し、ミキサ142に結合する。例示の実施形態では、伝送線144上の発振信号の基準周波数は、21.7GHzである。ミキサ142の出力をバンドパス・フィルタ96によって濾波し、増幅器94によって増幅する。増幅器94からの出力信号の一部を、カプラ95を介して結合し、送信信号50を供給して、増幅器78によって更に増幅し、送信アンテナ18によって送信する。増幅器84からの出力信号の別の部分は、受信信号経路内にあるミキサ60のLO入力ポートに供給される局部発振(LO)信号58に対応する。
【0047】
切換回路99、101は、バトラ(Butler)マトリクスを介して受信および送信アンテナ16、18に結合されている。アンテナ18、16および切換回路99、101、ならびにバトラ・マトリクスは、2001年8月16日に出願され「Switched Beam Antenna Architecture」(切換ビーム・アンテナ・アーキテクチャ)と題する米国特許出願第09/ 号に記載されている形式とすることができる。これは、本発明の譲受人に譲渡されており、その内容はこの言及により本願にも援用されるものとする。ここでは、スイッチ(切換)回路99、101およびバトラ・マトリクスは、切換アンテナ・ビームを有するアンテナに、SODシステム10のターゲット検出能力を高めるアンテナ・ビーム特性を与えるように動作することを言えば十分であろう。
【0048】
図示のように、受信信号54は、RF低雑音(ロー・ノイズ)増幅器(LNA)52、バンドパス・フィルタ56、および別のLNA62によって処理される。RF増幅器62の出力信号は、ミキサ60によってダウンコンバートされる。ミキサ60は、図示のように、送信機から結合される局部発振信号58を受ける。増幅器62からのRF信号および局部発振信号の周波数は、一例では約24GHzである。図示の受信機24は、直接変換ホモダイン受信機であるが、他の受信機構成(トポロジー:topology)もSODレーダ・システム10では使用可能である。
【0049】
ビデオ増幅器64は、ダウンコンバート信号を増幅および濾波する。例示した実施形態では、この信号は1KHzないし40KHzの間の周波数を有する。ビデオ増幅器64は、温度補償、漏洩信号の濾波、および周波数に基づく感度制御を含む機構を内蔵することができる。これらについては、2001年8月16日に出願され、「Video Amplifier for a Radar Receiver」(レーダ受信機用ビデオ増幅器)と題する同時係属中の米国特許第09/ に記載されている。これは、本発明の譲受人に譲渡されており、その内容はこの言及により全体的に本願にも援用されるものとする。
【0050】
A/D変換器68は、ビデオ増幅器64のアナログ出力を、次の処理のために、ディジタル信号サンプルに変換する。即ち、ディジタル信号サンプルは、DSP30内部の高速フーリエ変換(FFT)によって処理され、種々の周波数範囲(即ち、周波数ビン)内にある反射信号の内容を判断する。FFTの出力は、信号プロセッサ30の残り部分のデータとして用いられる。信号プロセッサ30では、視野内の物体を検出するための1つ以上のアルゴリズムが実装されている。これについては、図10ないし図16に関連付けて説明する。
【0051】
レーダ・システム10は、温度補償機構を含み、適宜ランプ信号を調節することにより、温度によって誘発される送信信号の周波数のばらつきを補償する。この目的のために、送信機22は、マイクロ波信号検出器74に結合されている誘電体共振器(DR)72を含む。マイクロ波検出器74の出力は、DSP30による処理のために、CANコントローラ80(図9)に含まれるアナログーディジタル変換器に結合されている。
【0052】
動作において、DR72は、送信信号50の周波数がDRの基本共振周波数付近のある範囲内(即ち、DRの通過帯域)にある場合にのみ、エネルギを検出器74に結合する。例示の実施形態では、DR72の基本周波数は、送信周波数範囲内にあり、通過帯域は、送信周波数範囲と比較すると、比較的狭い。この例示の実施形態では、DRは、システムの動作帯域の中央を中心とする約10MHzの通過帯域を有し、十分な周波数検出分解能を備えている。これは、いずれ明白となろう。検出器74は、DR72からの出力電力を検出し、このDRからの出力電力の所定レベルを示す電気信号を供給する。
【0053】
DR72からの出力電力の検出は、DRの基本所定周波数の送信を示す。更に、所定の周波数の送信は、所定のDSP出力ワードに対応し、一方このDSP出力ワードは、参照表(ルックアップ・テーブル)に指定されている「予測」送信周波数に対応する。
【0054】
動作において、DSP30がCANコントローラ80を介して周波数検出器72および74から、所定の周波数の送信を示す出力信号を受けると、DSP内部のソフトウエア比較器82によって、DSP出力に関連する予測周波数を所定の周波数と比較する。測定した検出時間およびコマンド(指令)周波数を相関付け、精度高い周波数測定を行う。予測周波数と測定周波数との間に少しでもずれがあると、これはDSP出力の調節が必要であることを示す。別の言い方をすれば、2つの周波数間の差は、参照表のデータを補正する必要があることを示す。何故なら、予測周波数が、対応するDSP出力に応答して送信されていないからである。
【0055】
単なる一例として、11110000というDSP出力が24.20GHzの送信周波数に対応し、DR72の基本周波数が24.20GHzであることを参照表が示す場合について考える。つまり、DR72からの出力電力の検出は、24.20GHzが送信されていることを示す。しかしながら、更に、DSP出力が11110001で与えられるときに検出が行われると仮定する。この状況は、DSP出力ワードを調節する必要があること、即ち、所望の予測周波数を送信するためには、1だけ下方にずらさなければならないことを示す。
【0056】
送信周波数と予測周波数との間の誤差を補償するには、種々の技法が使用可能である。一例として、新たなDSP出力ワードが供給される毎に、新たな誤差が検出されるまで、オフセットの方向に応じて、誤差量に等しいオフセット(即ち、送信周波数と、DROの基本周波数と関連付けて参照表に格納されているDSP出力ワードとの間の差)を加算または減算すればよい。別の言い方をすると、検出した誤差量だけ後続の各DSP出力を単にずらす。一般に温度は急に変化しないので、この誤差検出および補正は、50msまたは100msに1回というように、比較的少ない頻度で行えばよい。尚、送信信号50の周波数を検出し、DSP30にフィードバックし、DSP出力ワードを調節することによって送信信号の周波数を調節するためには、別の構造および技法も使用可能であることは、当業者には認められよう。
【0057】
また、図4も参照すると、DAC70(図3)の出力として供給される、例示のランプ信号220が示されている。動作において、前述の温度補償機構にしたがって、所定の送信信号周波数(即ち、DRO基本周波数)と、所定の周波数を発生するDSP出力ワードと関連する予測送信周波数との間の誤差を検出し、その結果、前述のように、DSP出力ワードを変更する。DSP出力ワードを上方または下方にずらすことの効果は、それに応じてランプ信号が上方または下方にずれることである。例えば、DSP出力の補正にしたがって、基準ランプ信号220の電圧が下方にずれ、図示のように、温度補償されたランプ信号224が供給される。
【0058】
本発明の更に別の態様によるSOD10の干渉低減機構を実施するには、乱数または擬似乱数発生器84(図3)を用いる。これは、DSP30内部のソフトウエアによって設けることもできる。乱数発生器84を用いて、ランプ信号86の少なくとも1つの特性(aspect)およびパラメータをランダムに変化させる。このようなパラメータの例は、図5に示すような各チャープ・サイクルのオフセット間隔、および図5Aに示すような各チャープ・サイクルにおいて発生する電圧(したがって、周波数)範囲である。
【0059】
図5を参照すると、VCO92に結合するための、ランプ信号86(図3)に対応する、例示のランプ信号230の複数のサイクルが示されている。図示のように、各ランプ・サイクルは時点T1, T2, T3, ...にて開始し、オフセット時点t1, t2, t3,...に開始するランプ(傾斜)部R1, R2, R3, ...およびこれに続くそれぞれのサイクル開始時刻T1, T2, T3, ...を有する。本発明によれば、各サイクルのオフセット間隔(即ち、間隔t1-T1, t2-T2, t3-T4,...)の期間は、DSP30によってランダムに選択する。これを行うには、オフセット間隔に対応するランダム遅延を再帰プロセスに導入し、これによってランプ信号を発生する。例示の実施形態では、各ランプ・サイクルは約1.1msecであり、各サイクルのオフセット間隔は、0ないし0.1msecの間で可能な16の間隔の1つからランダムに選択する。その結果、いずれの所与の時点においても、得られる送信信号50の周波数は、同様のレーダ・システムからの送信信号の周波数とは異なるが、レーダの送信信号範囲は同一である。
【0060】
この構成により、互いに近接して同一周波数範囲で動作する2つの同一SODレーダ・システム10は、互いに干渉しない。何故なら、いずれの所与の時点においても、システムが供給する送信信号の周波数は、互いに対してランダムに変化するからである。この機構によって、2つ以上の同一SODを車両上で用いることが可能となるという利点が得られる。これは、NODシステムの部品点数を削減し、NODシステム内部における1つ以上のモジュールの交換を簡略化するためには望ましいことである。近接するSOD間の干渉を低減する際、各SODを手動で操作したりプログラムして異なる送信信号を確保するのであれば、余り望ましくはない。
【0061】
図5Aのランプ信号234によって例示した、干渉を低減する別の技法では、SODシステム10に対して指定された周波数範囲内に収まりつつ、各ランプ・サイクルの間に、送信信号50の周波数範囲をランダムに変化させることを伴う。これを行うには、ピーク−ピーク・ランプ信号電圧を一定に保ちつつ各サイクルの間にランプ信号のランダムなオフセット電圧を導入する(即ち、ピーク−ピーク・ランプ電圧を一定に保ちつつ、ランプを上下に移動させる)。例えば、時点T1にて開始するサイクルの間、ランプR1は1ボルトから2.5ボルトに上昇し、したがって第1周波数範囲に対応する。次のサイクルの間、ランプR2は1.25ボルトから2.75ボルトに上昇し、第2の異なる周波数範囲に応答する。例示の実施形態では、送信信号50の周波数範囲は、24の異なる周波数範囲からランダムに選択する。
【0062】
オフセット電圧をランプ信号に導入し電圧範囲をランダムに変化させるためには、回路のアナログ部分またはディジタル部分のいずれにおいても、種々の技法が可能である。一例として、平滑化回路76(図3)によって、オフセット電圧を導入する。
【0063】
尚、図5Aのランプ信号234のランプR1, R2, R3, ...は、図5に関連付けて先に説明したように、ランダムなオフセット間隔(即ち、t1-T1, t2-T2, t3-T3, ...として計算されるオフセット間隔)を有するが、送信周波数範囲は、オフセット間隔を変化させなくても、ランダムに変化させ得ることは認められよう。別の言い方をすれば、各ランプ・サイクルのオフセット間隔をランダムに変化させ、各ランプ・サイクルの周波数範囲をランダムに変化させる技法は、別個にまたは組み合わせて実施することができる。また、図5および図5Aでは各ランプ・サイクルのオフセット間隔をランダムに変化させ、図5Aでは各ランプ・サイクル毎に電圧範囲をランダムに変化させているが、選択したパラメータ(複数のパラメータ)は、ランプ・サイクルの1つ以上においてランダムに変化させればよく、あらゆるランプ・サイクルにてランダムに変化させる必要はないことも認められよう。
【0064】
SODシステム10の別の特徴は、VCO92(図3)の非線形動作の補償である。図6は、VCO出力信号88(図3)の周波数とVCO制御信号電圧86(図3)との間にある関係を表す曲線238を示す。図示した曲線238は、約180MHzの典型的な周波数範囲と、約1.25ボルトの典型的な電圧範囲とを有する。理想的なVCOでは、この関係は、曲線236で示すように、線形となるが、通例では、曲線238で示すように、多少の非線形性がある。更に具体的には、DSP出力ワードを調節し、実際の曲線238に関して実質的に相補的なランプ電圧(即ち、DAC出力電圧)を供給する。このような相補曲線240を図6Aに示す。
【0065】
VCO92の動作は、DSP出力ワード・シーケンスをDAC70に供給し、検査(テスト)受信機(図示せず)によって送信周波数を測定することを特徴とする(即ち、図6のような曲線を生成する)。このようなVCOの特徴化は、製造において、VCOのSODシステム10に挿入する前または後、あるいはSODシステムを車両上に配備する前または後に行うことができる。VCOを特徴化させれば、理想的な特性(図6において236で示す)に対して曲線の相補を取ることによって、図6Aの相補曲線が簡単に決定される。次いで、図6AのVCO制御信号240を発生するために必要なDSP出力ワード・シーケンスを決定することができる。単なる一例として、VCOの特徴化に先だって、DSP出力シーケンス00000000、00000001、00000010、00000011、...を用いれば、線形なランプを発生し、VCOの非線形性を補償することができ、シーケンスを調節して00000000、00000000、00000001、00000010、...にすることができる。制御信号240を発生するために必要なDSP出力ワード・シーケンスを決定するプロセスは、手動で行うことができ、あるいは自動で行うことができ、好ましくはシステム毎に反復可能とする。通例では、DSP出力ワードに対する補正は、ソフトウエアで行い、メモリに格納する。
【0066】
VCO出力周波数が入力電圧によって変化する様子がわかれば、VCO制御電圧86を調節し、VCOの出力周波数を所望の態様で掃引させることができる。VCO出力とVCO入力との間にある関係は非線形であるが、VCO出力とDSP出力との間にある関係はほぼ線形である。
【0067】
また、図6におけるVCO92の特性曲線238がわかれば、システムを最適化し、VCOの特定の入力電圧範囲で動作するようにできることも認められよう。即ち、所望のDAC出力電圧範囲を発生するために必要なDSP出力ワードの範囲を選択するだけで、VCOの動作の最も線形な領域(図6において242で示す)をDAC出力電圧範囲として選択することができる。
【0068】
図7も参照すると、代わりのSODシステム250が図3のSODシステム10と異なるのは、ランプ信号86を処理して送信信号50を発生する送信機22のVCO部である。図3のSODシステム10と同一のSODシステム250の部分は、同一の参照番号が付されている。図3のVCO92と同様、VCO254は、ランプ信号86に応答し、出力信号をバンドパス・フィルタ96に供給する。一方、バンドパス・フィルタ96は、24.01ないし24.24GHzの範囲の所望の送信周波数を有する出力信号を供給する。
【0069】
SODシステム250は、電圧制御DRO254の形態でVCO254を含む。更に、VCO254は、増幅器270に結合されている50オーム負荷258も含む。一方、増幅器270は、ダイオード移相器262に結合されている。移相器262、信号結合経路268、272、増幅器270、および誘電体共振器266が発振ループを形成する。
【0070】
動作において、DR266はその通過帯域以内で信号を伝送線268から伝送線272に転送する。増幅器が飽和するまで、増幅器270によって信号を増幅する。DR266の通過帯域は、所望の送信周波数範囲をカバーするように選択され、例示の実施形態では、24.01ないし24.24GHzの範囲である。伝送線268上の最終的な信号周波数を制御するには、移相器262によって導入される位相シフトを調節する。このように、ダイオード移相器262は、発振ループ上において位相の補強を行い、発振ループは、移相器およびDRを含むフィードバック・ループによって決定された周波数を求める。一般に、フィードバック・ループが発振する周波数において、フィードバック信号、例えば、信号経路272上の信号は、ループに沿ってその開始点に戻ったときに、0度の位相(または360度位相のいずれかの倍数)、および1よりも大きいループ利得を達成する。即ち、ループ1周の利得は1よりも大きい。このように、移相器262を変更することによって、フィードバック信号が0度を達成する周波数を同様に変化させ、ループ利得が1よりも大きいままであれば、ループは、変更した周波数で発振する。図7の構成では、VCO254によって供給される信号のアップコンバートは不要である。何故なら、VCOは所望の送信周波数範囲内で動作し、送信信号50を発生するからである。
【0071】
図8も参照すると、代わりとなる別のSODシステム280が図3のSODシステム10と異なるのは、送信機のVCO部およびアンテナ構成である。図3のSODシステム10と同一であるSODシステム280の部分には、同様の参照番号が付されている。
【0072】
SODシステム280は、アナログ平滑化回路76からランプ信号86を受けるVCO284を含む。図示のように、VCO284は、24.01ないし24.24GHzの間の送信周波数範囲で動作し、出力信号をバンドパス・フィルタ96に供給する。VCO284は送信周波数範囲で動作するので、VCO出力信号(図3)をアップコンバートする必要はない。
【0073】
尚、図3のSODシステム、図7のSODシステム250、ならびに図8のSODシステム8の特徴、構成素子、エレメント、およびその他の部分は、混成させたり、並置させてもよいことは、当業者には認められよう。一例として、図3のアンテナ構成を、図7のVCO254または図8のVCO284と共に用いてもよいことは認められよう。
【0074】
図9を参照すると、SOD電子装置28(図1、図3、図7、および図8)のブロック図が詳細に示されており、DSP30、CANマイクロプロセッサ80、CAN送受信機150、電源32、およびメモリ156を含む。メモリ156は、データおよびプログラム情報を不揮発的に格納する。また、ビデオ増幅器64も示されており、出力信号をA/D変換器68に供給する。A/D変換器68は、DSP30のポート312に結合されている。一実施形態では、メモリ156は、128k×8フラッシュ・メモリとして設けられており、ポート312はDSP30のシリアル・ポートとして設けられている。D/A変換器70は、図示のように、ポート312を介してDSPから、ディジタル・ワード・シーケンスの形態でディジタル化ランプ信号を受け取り、更に平滑化回路76に結合されている。
【0075】
DSP30は、VCO制御信号電圧86対送信周波数の参照表のようなデータを格納したRAM304と、以下で説明する検出アルゴリズムを実施するために用いられるソフトウエア・コードのようなプロセス命令を格納したプログラムRAM306とを含む。メモリ156に格納されているプログラムおよびデータ情報は、電源投入時に、プログラムRAM306およびデータRAM304にそれぞれ転送される。図示のDSP30は、Analog Devices, Inc.が製造するADSP2186Mマイクロプロセッサであり、33MHzで動作する発振器308を含む。33MHzを内部で倍増し、DSPのクロック・レートである66MHzとする。
【0076】
DSP30は、更に、ディジタル入出力(I/O)ポート314も含み、ここでアンテナ制御信号がバス158上に供給される。DSP30は、ディジタルI/O314およびシリアル・ポート316を介して、CANマイクロプロセッサ80と通信を行う。シリアル・ポート316は、更に、シリアルEEPROM340に結合されている。シリアルEEPROM240は、較正定数、診断検査結果、およびトラブル・コードのようなデータを保持するために用いられる。
【0077】
例示の実施形態では、温度補償を実施するために用いられる乱数発生器84(図3)、および非線形VCO動作を補償するために用いられる比較器82(図3)は、DSPによって一連のソフトウエア命令として実施され、プログラムRAM306に格納され、マイクロプロセッサが実行する。しかしながら、これらの機能ブロックおよびその他のブロックは、ハードウエア、ファームウエア、ソフトウエア、あるいはハードウエア、ファームウエアまたはソフトウエアの組み合わせでも実施可能であることは、当業者には認められよう。
【0078】
図示のCANマイクロプロセッサ80は、Texas InstrumentsのTMS470系の1つである、TMS470R1F316であり、RAM320、フラッシュ・メモリ322、A/D変換器328、シリアル・ポート330、ディジタルI/Oポート332、CANインターフェース334、およびここでは4.915MHzで動作する発振器324を含む。図示のように、CANマイクロプロセッサ80は、シリアル・ポート330およびディジタルI/O332を介してDSP30に結合され、更にディジタルI/O332およびインターフェース334を介してCAN送受信機150に結合されている。
【0079】
CAN A/D変換器328は、種々の監視信号を受けるように構成された複数の多重化入力を有する。一例として、周波数検出器74(図3)の出力がCAN A/D変換器328に結合されている。CAN A/D変換器328への別の任意の入力が、温度センサ98(図3)によって供給される。温度センサは、受信機22の温度を示す出力信号を供給し、単独で用いてもまたは発振器90(図3)の機構と共に用いても、RFVCO90において温度によって誘発される周波数のばらつきを補償することができる。停電を検出するための任意の検出器も、A/D変換器328に結合することもできる。CAN A/D変換器328は、通常はDSP30による処理のために、受けた信号をディジタル形態に変換する。
【0080】
次に図10を参照すると、上面図で示す検出ゾーン500の一例は、方位領域であり、この中では、SODシステム504(SODセンサ504とも呼ぶ)が物体を検出するように指定されている。SODシステム504は、図1ないし図9において先に説明した形式とすることができる。SODシステム504を搭載した自動車508に近接する特定の検出ゾーン500以内の物体のみが検出に適格とされ、検出ゾーン500外部の物体は除外される。
【0081】
図示したゾーン500は、検出ゾーン形状の一例に過ぎず、この形状はレーダ・システムを用いる用途に応じて異なる。例えば、自動車用SODシステムは、交通の隣接車線内において、車両の盲点内にある物体を含む、物体を検出するように設計されている。隣接する交通車線よりも遠い車線や、盲点の外側にある物体を検出しても、望ましくないであろう。別の例として、限定する訳ではないが、衝突回避を含む目的のために用いられる自動車用FLSシステム122(図2)は、一般に車両の前方において物体を検出するように設計されている。このように、用途毎に異なる形状の検出ゾーン500が必要となる。
【0082】
側方(横方向)検出ゾーン500は、最大検出ゾーン境界512、最小検出ゾーン境界520、ならびに最大および最小検出ゾーン境界間に基準検出ゾーン境界516を含む。好適な実施形態では、SODシステム504は、最大検出ゾーン境界512の外側では物体を検出せず、常に最小検出ゾーン境界520内で物体を検出する。最大検出ゾーン境界512および最小検出ゾーン境界520間に、確率領域524が存在する。SODシステムは、領域524内では物体を検出してもしなくてもよい。確率領域524が存在するのは、SODシステム524を構成する実際の回路構成素子の不良や許容度のためである。理想的には、領域524の幅は0メートルである。したがって、確率ゾーンにおける検出の確率は、0ないし100パーセントの間である。一例の確率領域524は、0.6メートルの最大幅を有する。更に、検出ゾーン500は、SODシステムから検出される最も近い物体までの距離である、最短距離528を含む。例示のSODシステム504では、基準検出ゾーン境界の平均幅は約10メートルであり、平均長は約4メートルである。最短距離528は約0.25メートルである。
【0083】
検出ゾーン500および確率領域524のサイズおよび形状の仕様から、SODシステム・アーキテクチャに関連する多くの設計パラメータが決まる。例えば、SODシステム504は、確率領域524の幅と比較すると比較的高い測定精度で、物体までの距離を判定することができれば、所与の確率領域524内において非検出から所定の検出まで遷移可能なSODシステム性能が得られる。例えば、確率領域の幅が0.6メートルの場合、SODシステムの測定精度は0.06メートル程度でなければならない。
【0084】
検出ゾーン500によって決定されるシステム・パラメータの別の例として、SODシステム504に対して方位方向にある広い検出ゾーン境界512〜520を指定するには、方位方向において広いレーダ・カバレッジが必要となる。更に、複雑な輪郭を有する検出ゾーン境界512〜520では、検出アルゴリズムに多数のビームを用い、各々が異なる検出距離を有していなければならない。検出ゾーンに関係するビームは、図11Aおよび図11Bとの関連で更に詳細に示す。
【0085】
別の例として、検出ゾーン500の指定最短距離528は、好ましくは、図3に関連付けて先に説明したFMCWチャープ信号のような、チャープ信号を用いるシステム・アーキテクチャによって得ることができる。即ち、連邦通信委員会(FCC:Federal Communications Commission)は、前述のSODシステムが用いるような、6デシベル(6dB)(有効等方放射電力(effective isotropic radiated power)は6dBeirp)の低電力レーダは、200MHz以下の周波数帯域幅を有することができると指定している。以下の説明から明らかになろうが、短距離要件528およびFCC帯域幅要件によって、従来のパルス状レーダの使用は除外されることになる。
【0086】
FCCの200MHz帯域幅要件は、SODシステムをFMCWシステムとすることによって満たされる。何故なら、ゆっくりと変化するFMCW信号は、200MHzという狭い帯域幅で発生することができるからである。例えば、SODシステム504が発生する送信信号は、その周波数が約24.000GHzから24.200GHzまで約1msで上昇し、200MHzの帯域幅を有する。対照的に、従来のパルス状レーダは、短距離用途では、200MHzのFCC帯域幅要件を満たすことができない。パルス状レーダは、短距離におけるその検出能力にも限界がある。これは、SODシステムに要求される短距離において動作するためには、パルス状レーダ・システムは非常に短いレーダ・パルスを必要とするからである。技術的にこのような短いパルスを得ることが難しいだけでなく、パルス幅が狭くなるに連れて、送信信号の帯域幅が広くなる。約0.25メートル程の最短距離528における動作を可能とするのに十分短いパルス幅を有するには、パルス状レーダの周波数帯域幅は基本的に200MHzを越えなくてはならない。したがって、検出ゾーン500の特性は、多くの面でシステム設計に影響を及ぼす。受信エコーまたは信号に対して動作する検出アルゴリズム処理も、個々の特性を有する検出ゾーンで動作するように選択される。検出アルゴリズムについては、図12と関連付けて以下で説明する。
【0087】
自動車の横側に検出ゾーン500を示すが、図2に示すように、自動車508の周りには指定したサイズおよび形状の別の検出ゾーンも同様に指定できることは認められよう。例えば、本発明から逸脱することなく、前方および後方ゾーンを指定することができる。通例では、自動車製造業者が、ゾーン・サイズ、形状および自動車に対する位置を含めて、1つ以上の検出ゾーンを指定する。SODシステム504は、車両の側面のどこに搭載されても、適切な横方向検出ゾーン500を設けるように構成することができる。また、本発明では、別の確率ゾーン524および別の最短検出距離528も可能である。
【0088】
また、SODシステム504は、外側のバックミラー532の後ろ側の位置に示されているが、検出ゾーン500およびそのために決められるSLSセンサ504の位置は、自動車508の周囲に沿ったところであればどこにでも設定することができる。
【0089】
次に図11Aおよび図11Bを参照すると、異なる2つの横方向検出ゾーンの例536、548が示されている。図11Aでは、台形状の最大検出ゾーン境界536が設けられている。SODシステムの一例では、斜線で示すように、各々異なる最大検出距離を有する8つの方位方向ビーム540a〜540hが設けられている。これは、ビーム・エコーに対して動作する検出アルゴリズムによって決定する。8つのビーム各々の最大検出距離のアルゴリズムによる制御によって、指定した最大検出ゾーン境界536に対する実際の最大検出ゾーン538の形状が規定される。
【0090】
図11Aおよび図11BのSODシステムの例は、8つのビームを有し、各々、ビーム幅が約15度、全方位走査(total azimuth scan)が150度を越える。尚、本発明から逸脱することなく、別の数のビーム(例えば、8つより多い数や少ない数)や別の走査角度も可能であることは、当業者には認められよう。個々の用途において用いる特定のアンテナ・ビーム数は、所望の検出ゾーン500および確率領域524の幅を含む種々の要因に応じて選択される。尚、要因はこれらに限定される訳ではない。
【0091】
図11Bは、最大境界の形状がほぼ矩形である検出ゾーン548を示す。この場合も、システム例では、8つの方位方向ビームが設けられ、斜線で示すように、各々異なる最大検出距離を有し、距離552a〜552hはビーム540a〜540hとは異なるため、この場合も斜線で示すように、異なる実最大検出ゾーン550を形成する。
【0092】
次に図12を参照すると、図3のDSP30のような、SODプロセッサが実行するプロセス556のフロー図を示す。このプロセスは、主サイクルおよび副サイクルを含む。副サイクルは、SODアンテナ・システムの特定のビームを利用して行なわれる検出動作全てを含む。主サイクルは、SODシステムが設けるビーム群全てを利用して行なわれる動作を含む。ステップ560において主サイクルを開始し、ステップ564において副サイクルを開始する。主サイクル560の開始時に、ビームを最初のビームに設定し直す。副サイクル564の開始時には、ビームを次の隣接ビームに設定し直す。
【0093】
ステップ570において、チャープ信号を開始する。チャープの間、ある数nの受信信号のディジタル・サンプルが、時間期間tにfsKHzのレートで、前述のA/D変換器68(図3)によって処理される。図3に示す実施形態では、n=256、fs=256KHz、そしてt=1msecである。
【0094】
本発明では、他のレートでの他の数のサンプルも可能であるが、nおよびfsの選択によって最終的な周波数および距離分解能が決まるので、システムの検出要件全てを満たすように選択しなければならないことは、当業者には認められよう。
【0095】
ステップ574において、各照準角(pointing angle)毎に距離閾値を確定し、検出ゾーンを規定する。このように、所与のビーム照準角において、SODシステムに対して遠すぎるまたは近すぎて検出ゾーンに該当しない距離検出を、予め確定した距離閾値によって除外する。また、ステップ574において、エコー振幅ウインドウ閾値も確定する。低い方の閾値よりも高く、高い方の閾値よりも低いエコー、すなわち、振幅ウインドウ以内にあるエコーを生成する物体検出のみを有効と見なす。低い方の閾値よりも低いエコーは、物体即ちターゲットではなく、システムのノイズによって生ずる可能性がある。高い方の閾値よりも高いエコーは、別の車両からのレーダ送信のように、干渉するレーダ源によって生ずる可能性がある。このようにして、ステップ574において範囲および振幅双方に閾値を確定する。尚、距離閾値を変更すれば、別の検出ゾーン形状およびサイズも指定可能であることは認められよう。
【0096】
ステップ578において、データ・サンプルを切り詰める(切捨てる)ことにより、データ集合の先頭およびデータ集合の末尾における少数のサンプルを除去する。除去されたサンプルは、ハードウエア上の制約による、望ましくないアーティファクト(artifact)を含む場合がある。ハードウエア上の制約とは、アンテナ・ビーム間で切り替えた後に発生する可能性がある増幅器の静定(セトリング:settling)のようなものである。例示の実施形態では、約256個のデータ・サンプルが切り詰めの後に残留している。
【0097】
また、ステップ578において、残りの入力サンプルに対して振幅の重み付け、即ち、枠付け(ウインドウ処理)を行う。図3の説明から、A/D変換器68のデータ・サンプル出力は、DSP30内のFFTによって処理されることを想起されたい。FFTに入力されるデータ・サンプルの振幅重み付けによって、得られる周波数ドメインにおけるスペクトル・ピークの最小幅、および各FFT周波数ビン(bin)に関連するサイドローブ振幅に関して有効な効果が得られる。本質的に、スペクトル的に純粋な周波数をFFTに入力する場合、入力に重み付けを行うと、その結果FFT出力が現れる周波数ビンの数を、入力に重み付けを行わない場合よりも減らすことができる。受信エコーと送信信号との間の周波数差は距離に直接関係するので、受信エコー周波数を検出する精度は、距離精度に直接関係する。1つのFFTビンよりも細かく周波数を分解することが望ましい。
【0098】
例示のSODシステムでは、チェビシェフ重み関数(Chebyshev weighting function)を入力サンプルに適用する。この重み関数によって、狭帯域信号の多数のFFTビンへの拡散と、良好なサイドローブ抑制との間で適当な妥協が得られる。また、種々の重み関数を入力データ・サンプルに適用することができ、重み付けを適用する際にはハードウエアおよびソフトウエア双方の操作を含む種々の技法が用いられることも、当業者には認められよう。
【0099】
FFTの出力は、当該FFTへのディジタル入力サンプルの周波数ドメインにおけるスペクトル表現であり、ディジタル入力サンプルは時間ドメインのアナログ信号であることは、当業者には認められよう。また、サンプル数nおよびサンプル・レートfsを含むパラメータは、fr=fs/nの関係によって、FFT出力の周波数分解能、即ち、ビンの幅frを決定することも当業者には認められよう。ターゲットの距離は受信信号の周波数に関連があるので、周波数分解能は距離分解能と相関がある。前述のように、指定された検出ゾーン500(図10)を設けるには、距離分解能は0.6メートルよりも高くなければならない。
【0100】
例示のSODシステムでは、256KHzサンプル・レートfsで取り込んだ、256個のデータ・サンプルnを供給する。したがって、得られるFFT周波数分解能fsは1KHzとなる。対応する距離分解能は次のようにして得ることができる。前述のように、例示のSODシステム504(図10)では、200MHzの周波数範囲において約1msecで周波数チャープを掃引する。したがって、1KHzは約5nsecの時間期間を表す。5nsecの間に、レーダ・エネルギは約1.5メートルの距離を伝搬することができる。エネルギはターゲットに向かって伝搬すると共に後方にも伝搬するので、A/D変換器68(図3)からの1KHz信号によって表されるターゲットまでの距離は、約0.75メートルとなる。2KHz信号は、1.5メートルのところにあるターゲットを表す、等となる。このように、幅が1KHzのFFTビンは、0.74メートルのターゲット距離分解能に対応する。この測定精度では、0.6メートル未満という所望の距離分解能を満たさない。したがって、追加の処理が必要となる。
【0101】
例示の実施形態では、ステップ578において、当業者には周知のゼロ・パディング技法(zero padding technique)を、FFTへの入力サンプルに適用し、結果的にRFTビンの幅を縮小する。また、他の技法を用いてもFFTビンの幅を縮小できることは当業者には認められよう。例えば、種々の補間技法が適用可能である。
【0102】
ウインドウ処理され、ゼロ・パディングされた入力サンプルに対して、ステップ582においてFFT処理を行う。チャープ・エコーから時間ドメイン・データ・サンプルを収集し、このデータ・サンプルに対して複素FFTを実行する。後続の処理は、さらに測定精度を向上させることができる。これについては、ステップ606から開始するプロセスで説明する。
【0103】
ステップ586において、複素FFTデータに対して振幅の計算を行うことによって、複素FFTデータのFFT実部および虚部を用いてFFTの振幅、即ち、FFT出力信号を計算する。このことを以降FFT出力データと呼ぶ。
【0104】
方位方向における特定のビーム・ステアリング角に関連するデータ・サンプルはこのようなデータ集合毎に変化する可能性があるので、特定のビーム・ステアリング角に関連する時間ドメイン・データ・サンプルまたはFFT出力データのいずれかの平均をとることによって、偽検出の割合を低下させる、即ち、偽警報率を改善することができる。例えば、システムのノイズまたはその他のアーティファクトが原因で、検出した周波数または振幅にばらつきが生じた場合、平均を取ることによって、このようなアーティファクトの影響を減少させ、したがってシステム性能を向上させることができる。
【0105】
ステップ590において、前述の平均化に用いるために、4つのチャープを処理したか否か判定を行う。4つのチャープが未だ処理されていない場合、処理はステップ570に戻り、別のチャープを開始する。4つのチャープを処理し終えた場合、処理はステップ602に進み、4つのチャープからのFFT出力データの平均を取る。例示のSODシステムは副サイクル・タイミングの間各ビーム毎に4つのチャープの平均を取って用いるが、平均を取るチャープの数はこれ以外でもよいことは当業者には認められよう。
【0106】
ステップ602において、得られたFFT出力データに対して更に距離の正規化を行う。レーダ反射信号の振幅は一般に距離に比例して減少し、FFTビンの増大に比例して距離が延長するが、距離正規化を行わないと、FFT出力データは、FFTビン全体における振幅の減少を示す。距離正規化を行って、FFT出力データの振幅距離依存性(amplitude range dependency)を最小に抑えるような倍率でFFTビンの振幅を調節する。
【0107】
ステップ606において、最小および最大距離閾値、周波数RminおよびTBeamRange、ならびに最小振幅閾値Tobjectをそれぞれ、平均化したFFT出力データに適用する。閾値については、図14Aおよび図14Bに関連付けて更に詳しく説明する。ここでは、距離閾値は、個々のビーム照準角度に対して、SODシステムから近すぎる物体および遠すぎる物体に対する検出を特定的に制限し、必要に応じて、例えば、検出ゾーン500(図10)のような、指定検出ゾーン内で物体を検出することを言えば十分であろう。
【0108】
例示の検出領域500が要求する0.6メートルよりも高い距離精度を得るには、更に処理が必要となる。このために、ステップ606では、DSPによってFFT出力データの一次および二次導関数を計算する。これについては、図13Aおよび図13Bに関連付けて更に詳しく説明する。以下で説明するように、距離精度は、FFT出力データの一次および二次導関数を用いることによって、大幅に向上する。ステップ610において、以下で述べるように、一次導関数および二次導関数の負方向ゼロ交差を計算する。
【0109】
FFT出力データの一次および二次導関数は、検出が行なわれたか否かに関する指示を与える。検出が行なわれた場合、一次および二次導関数は、検出物体の距離も与える。距離閾値の範囲内にある距離で、十分な振幅を有する物体のみが、ステップ612においてSODシステムによって有効と見なされ、これによって副サイクル検出フラグをセットする。ステップ612は、単一のビーム・ステアリング角に関連する検出を行って、副サイクルの処理を終える。
【0110】
ステップ616において、副サイクル検出フラグを検出テーブル(表)、即ち、ターゲット検出報告マトリクスに格納する。このテーブルをブロック616に示すが、アンテナ・ビームに対応する列と、主サイクルに対応する行とを含む。テーブル内の各エントリは、副サイクル検出フラグである。「T」(真)は、副サイクル中に検出された関連のビームにおける副サイクル検出を示し、F(偽)は副サイクル検出がないことを示す。したがって、620で示すエントリは、副サイクル中の第1レーダ・ビームにおける検出を示す。主サイクル毎に1つの行全てが得られ、検出表616の各列は、所与のビーム・ステアリング角に対する連続副サイクル検出フラグから成る。
【0111】
副サイクル検出フラグを表に格納した後、ステップ636において、主サイクルが終了したか否か、即ち、副サイクル検出フラグが最後のビームに対して得られたか否かについて判定を行う。主サイクルが終了していない場合、処理は次のビームのためにステップ564に戻り、このビームに対してステップ564〜616を繰り返す。一方、主サイクルが終了し、検出表の1行が完成した場合、ステップ644において表を分析する。
【0112】
ステップ644において、検出表に格納されている副サイクル検出フラグを論理的に組み合わせ、偽警報率を低下させて警報状態メッセージを発する。警報状態メッセージ644は、検出ゾーン内におけるターゲットの有無を示す。例えば、表において628および632で示すグループのような、4つの副サイクル検出フラグで1組のグループを論理的に組み合わせ、偽警報率を低下させる。論理的に組み合わせたグループ628、632は、副サイクルおよび主サイクル双方に亘ることができる。即ち、1つよりも多い列および1つよりも多い行に亘ることができる。例示の実施形態では、各グループ(例えば、グループ628、632)は検出フラグの2×2マトリクスである。尚、検出表の第3行によって表される主サイクルの完了時にのみグループ632を分析し、一方表の第2行によって表される主サイクルの完了時にグループ628を分析することは認められよう。
【0113】
組み合わせた各グループ628、632を処理し、当該グループ内において少なくとも2つの検出フラグが真であるか否か判定を行う。即ち、副サイクル検出フラグの2×2グループにおいて、2つ以上の副サイクル検出フラグが真であると、ターゲット検出を示す警報状態メッセージが生成される。このように、グループ628の処理では、連続する副サイクルの間にビーム1における連続検出から警報状態メッセージが生成される。同様に、グループ632の処理により、1回の主サイクルの間にビーム4および5における検出によって警報状態メッセージが生成される。副サイクル検出フラグの特定的な論理組み合わせについて述べたが、1つまたは複数のビームおよび1つ以上の主サイクルからの副サイクル検出フラグの別の論理的組み合わせも、本発明では可能であることは当業者には認められよう。ステップ644における主サイクル処理が完了すると、ステップ560において新たな主サイクルが開始される。
【0114】
検出ゾーンにおけるターゲットの存在を示す警報状態メッセージが生成されると、システムは用途に適した処置を講ずることができる。例えば、視覚指示または可聴アラームを発して、SODシステムの検出ゾーン内に物体があることをドライバに警報することができる。
【0115】
図13は、チャープ信号および処理ステップに関する副サイクル・タイミングを示す。副サイクル648は、所定の時間期間(例えば、5.5ms)でビーム・ステアリング角毎に完了する。この時間期間以内に、4つのレーダ・チャープ652a〜652dが送信され、反射チャープ・エコーが送信から識別され、その差が間隔656a〜656dの間にサンプリングされ、間隔660a〜660dの間に差のFFT分析が行なわれ、間隔664a〜664dの間にFFT振幅の計算が行なわれ、間隔668において4つのFFT出力データの平均を取る。間隔672において一次および二次導関数を計算し、分析し、間隔676において副サイクル検出フラグを生成する。次いで、次のビームに対して副サイクル648を繰り返す。尚、間隔668、672、および676に関連する処理は、次の副サイクルにおける第1チャープ680のサンプリングと同時に行なわれる。
【0116】
図5および図5Aに関連付けて先に説明したランダム可変チャープ・オフセット間隔680a〜680dによって、別のSODシステムを含む別のレーダからの受信に起因する偽検出を低減する。
【0117】
副および主サイクル・タイミング全体の選択は、指定の時間間隔内に物体を検出し、システムが適切な時間量で処置を講ずることができるように行う。図示のSODシステム504(図10)では、主サイクルが完了する毎に、即ち、7回の副サイクルが完了する毎に、警報状態メッセージを生成する。したがって、約50msec毎に1回警報状態メッセージを生成する。CANマイクロプロセッサ80(図9)は、車両全体に対して約300msecの同期更新率(synchronous update rate)を有する。つまり、CANサイクル毎に、数回の主サイクルが行なわれ、これに応じて警報状態メッセージが生成される。例示の実施形態では具体的なタイミング選択について述べたが、他のタイミングの選択も可能であることは認められよう。例えば、4つのFFT以外の平均化や、7つ以外のビームも使用可能である。この説明を読んだ後であれば、図13のタイミング構造に対して必要な変更は、どのようなものであれ、いかにして実施すればよいか、当業者には明白にわかるであろう。
【0118】
次に図14Aおよび図14Bを参照すると、図12のステップ602において発生したような、FFTデータ曲線682の一例は、特定の検出範囲および1つ以上のFFTビンに対応する検出周波数690において、振幅検出ピーク686を含む。尚、単一のターゲットからの検出ピーク686は、単一のFFTビンよりも広い場合もあることは認められよう。前述のように、周波数ドメインにおいて検出したエコーの拡大(broadening)は、特定のFFTの特性(aspect)、即ち、FFTへの入力データ・サンプルに適用することができる重み関数に関係する。また、拡大は、特定のレーダ・ビームの軸に沿ったターゲットの寸法のような、エコーを発するターゲットの物理的特性(aspect)にも関係付けることができる。大きく広がったターゲット(extended target)は広い範囲を有し、したがってその距離に対応して広がった周波数として検出することもできる。
【0119】
一般に、単一のターゲットに対するFFT出力データ曲線682のピーク686は、ターゲットまでの距離に対応する周波数690である。しかしながら、図15および図16に関して、場合によっては、ピークはターゲットまでの距離の誤った印象を与える可能性があることがわかる。ここでは、FFT出力データ曲線のピークは、ターゲットまでの距離を示すと想定する。
【0120】
図12の検出アルゴリズム556に関連して説明したように、FFT周波数ビンは、特定の検出ゾーンに要求される要求精度を得る程十分に狭くすることができない場合もある。単一のターゲットからの検出信号が数個のFFTビン間に広がった場合、十分な距離分解能を得るためには、FFT出力データに対して追加の処理を行わなければならない。
【0121】
FFT出力曲線682の一次導関数694を検討することによって、FFT出力データ曲線682のピーク686が、負方向ゼロ交差698と一致することが解明された。つまり、一次導関数694の負方向ゼロ交差698から、FFTピーク686の周波数690が得られ、したがってターゲットまでの対応する距離が得られる。このように距離を検出すると、ピークが生じるFFT出力データ曲線682の端数周波数ビンを判定することによって単に距離を判定するよりも、精度を向上させることができる。なぜなら、ピークは多数のFFTビンにおいて生ずるからである。
【0122】
尚、図14Aおよび図14BはFFT出力データ曲線682およびFFT一次導関数694を滑らかな連続波形として示すが、FFT出力曲線682によって表されるFFT出力データ、および一次導関数694は、不連続なディジタル・サンプルで構成されている。その結果、一次導関数694のゼロ交差を求めるには、追加の処理が必要となる。一次導関数694の点の間隔が十分に狭い場合、隣接する一次導関数のデータ点はほぼ直線上に並ぶことになる。この近似を用いて、従来の三角法によってゼロ交差698を求めることができる。例示の実施形態では、データ点間の間隔は、約500Hzであれば十分であることがわかった。しかしながら、本発明では、他のデータ点周波数間隔も使用可能であることは、当業者には認められよう。尚、このように決定した一次導関数のゼロ交差698は、いずれの周波数でも可能であり、FFTビンの中心である必要はなく、したがって周波数分解能および関連する距離分解能は、FFTピーク686が生じる周波数を判定する従来の技法と比較して、大幅に改善されることを注記しておく。
【0123】
複雑な反射エコーでは、例えば、多数のターゲットからまたはビームの軸に沿って延びるターゲットからの場合、二次導関数706の負方向ゼロ交差を判定すれば、前述のように一次導関数を用いる場合よりも優れた距離判別を行うことができる。FFT出力データ曲線682の二次導関数706の負方向ゼロ交差702は、FFT出力データ曲線682の負屈曲点710に対応する。負屈曲点710は、FFT出力データ曲線682の傾きが上方カーブから下方カーブに変化する点である。
【0124】
尚、FFT出力データ特性(data feature)の上昇部分、例えば、714は離散負屈曲点710を有し、一方この特性のピーク686は周波数軸に沿って延長可能であることは認められよう。FFT出力データ特性の拡大は、入力サンプルの重み付けのようなFFTの数学的特性と、ターゲットの寸法特性との双方に関係付けられるが、FFT出力データ構造714の上昇部分は、一次までは(to a first order)FFTの数学的特性のみに関係する。FFT出力データ構造714の上昇部分上にある負屈曲点710を用いると、FFTピーク686の周波数を予測することができる。これは、ピーク686が明確ではない場合には望ましいであろう。要するに、ターゲット寸法の比較的広い範囲に対して、負屈曲点710とFFTピーク686との間の距離716は既知で一定であり、FFTの数学的特性のみによって決定される。したがって、FFT出力データ構造714の上昇部分の最初の負屈曲点710を見つけ、負屈曲点710を用いてピーク686の位置を予測することによって、更に複雑なFFT出力データ曲線のスペクトル形状に対しても、ターゲットまでの距離を求めることができる。
【0125】
図12におけるステップ606に関連して注記したが、個々のビーム照準角に対して特定的な閾値Rmin717およびTBeamRange718を、一次導関数または二次導関数テストのいずれかによって計算した、物体距離の周波数計算値に適用する。即ち、閾値以内にあるピークを有効と見なす。同様に、振幅閾値Tobject719よりも高いピークのみを有効と見なす。
【0126】
次に図15を参照すると、例として示す曲線728は、ほぼ平坦な上部FFT出力データ曲線が得られるようにビーム軸に沿って拡長したターゲットによって発生したFFT出力データに対応し、このデータ曲線のピークは、不定、即ち、多数のピーク724、732が得られる。一緒に示す曲線736は、拡長しないターゲットから得られたFFT出力データに対応する。FFT出力データ曲線728をFFT出力データ曲線736と比較することによって、負屈曲点720、740が一致することがわかる。このように、FFT出力データ曲線728の二次導関数を計算し、得られた負方向ゼロ交差を用いて、前述のように負屈曲点720および724間の既知の距離、即ち、周波数を加算することによって、ピーク724を決定すれば、高精度の距離判定が行える。
【0127】
次に図16を参照すると、FFT出力データの一例に対応する別の曲線744が示されている。この曲線は、2つのターゲットからのエコーの同時受信によって生ずると考えることができる。2つのターゲットの内、一方は他方よりも弱いとする。尚、強いエコーのために、弱いエコーに関連する複合FFT出力データ曲線744の曲線部分748はピークを全く有さず、一方強いターゲットからの曲線部分752は明確なピーク756を有することを注記しておく。その場合でも、複合FFT出力データ曲線744の二次導関数を計算することによって求められる負屈曲点760、764を用いて、双方のターゲットの距離を予測することができる。FFT出力データ曲線744の二次導関数の2つの負方向ゼロ交差の検出、および図14Aの距離716のような既知の距離の使用により、ピーク周波数点768および756を検出するに至る。第1の負屈曲点760を用いて、第1のターゲット距離に対応するピーク768を求めるが、ピーク768は実際には存在しない。同様に、第2の負屈曲点764を用いて第2のターゲット距離に対応するピーク756を求める。周波数ピークはターゲット距離に対応するので、強いターゲットおよび弱いターゲット双方までの距離を判別することができる。このように、FFT出力データの二次導関数を用いると、一層複雑なFFT出力データ曲線によって表されるターゲットについても、距離を判別することができる。
【0128】
次に図17Aおよび図17Bを参照すると、それぞれ、図11Aおよび図11Bと同様に、横方向検出ゾーン536、548の異なる例が2つ示されている。図17Aでは、台形状の最大検出ゾーン境界536が設けられている。図17Bでは、ほぼ矩形状の最大検出ゾーン境界548が設けられている。図17Aに示すように、例示のSODシステムは8つの方位方向ビーム540a〜540hを備え、斜線で示すように、各々異なる最大検出距離を有し、ビーム・エコーに対して動作する検出アルゴリズムによって判定される。図17Bに示すように、システムの一例は、8つの方位方向ビーム552a〜552hを備え、斜線で示すように、各々異なる最大検出距離を有する。距離552aから552hは、ビーム540a〜540hとは異なるため、この場合も斜線で示すように、実際に形成される最大検出ゾーン550は異なる。8つのビームの各々の最大検出距離のアルゴリズム制御は、指定された基準検出ゾーン境界536、548に対して、実際の最大検出ゾーン境界538、550を規定する。尚、本発明から逸脱することなく、別の数のビーム(例えば、8つよりも少ないまたは8つよりも多いビーム)や走査角も可能であることは、当業者には認められよう。個々の用途において用いられるアンテナ・ビームの特定の数は、前述のように、要求分解能および種々のその他の要因に応じて選択される。
【0129】
環境によっては、自動車のサイズや周辺視野の優先度等に基づいて、検出ゾーン536、548を変更することが望ましい場合もある。更に、例えば、検出ゾーンの変更をが必要な他の理由には、トレーラの曳航、車線サイズの変更、交通密度および個人的な好みが含まれる。図17Aに示すように、多数の狭いビーム、ここでは、ビーム540a〜540hを設け、ビーム長を調節することによって、検出ゾーン536の形状を変化させることができる。ビーム540a〜540hの各々の例として、ビーム540aを見ると、ビーム540aは複数の距離部分R1, R2,...R15, Rnを含み、その各々はセンサからの距離(レンジ)を示す。距離部分R1ないしRnの各々に、そして個々のビームに対する所望の距離に応じて対応する距離ビンを作成する。所望の距離ゲートに応じて、各距離ビンを検索(クエリー:query)することができる。尚、8つのビームの距離の各々はセンサ毎に変化しないことは認められよう。距離ゲートは、図21のステップ574に示すように、距離ゲートを制御するために用いられるソフトウエア命令を変更することによって変更することができる。可能なターゲット検出に対してビームの各々において検索する距離ビンを変更することによって、検出ゾーン536、548を可変とすることができる。再度図3を参照し、ターゲットが検出ゾーンにあるか否かの判定について、手短に説明する。ビデオ増幅器67からのビデオ信号は、ビーム毎に別個にA/D68に供給される。ランプ信号の各チャープの上部分、下部分およびCW部をA/D68からDSP30に供給する。各サンプルに、ウインドウ処理即ち振幅重み付けおよびゼロ・パディングを行う。各サンプルにFFTを実行し、スペクトルの判断基準にしたがってサンプルの信号が閾値よりも高いときにターゲットを検出する。前述のように、距離(レンジ)および距離レート(range rate)データを格納する。検出要件に応じて、上方または下方ランプ生データを用いて、時間を前進または逆進させたり、あるいはターゲットを空間的にずらすことが望ましい場合もあり、検出される各ターゲットはある距離、または、例えば、FFT、ビンと関連付けられる。次に、ターゲットが警報ゾーン内にあるか否か判定し、ターゲットが警報ゾーンにおいて検出された場合、信号を活性化し、検出エリア内におけるターゲットの存在を示す。ビーム毎に各距離ビンをゾーン境界の内部または外部のいずれかに割り当て、ターゲットの存在を判定するために当該距離ビンを検索するか否か判定を行う。尚、ソフトウエア命令を変更することによって、割り当てた境界をビーム毎に範囲内外に移動させ、警報ゾーンのサイズおよび形状を個別に作成できることは認められよう。このような構成では、ハードウエアを変更することなく、種々の検出ゾーンを設けることができる。
【0130】
検出ゾーン536によって設けられるカバレッジ・エリアでは、ビーム540aの距離ビンR1〜R6またはビーム540bの距離ビンR1〜R6において何らかのターゲットが検出されると、陽性を示す警報が発生することは、今や認められて当然であろう。検出ゾーン548によって設けられるカバレッジ・エリアでは、ビーム552aの距離ビンR1〜R6またはビーム552bの距離ビンR1〜R7において何らかのターゲットが検出されると、陽性を示す警報が発生する。尚、図面における簡略化のために、ビームにおける距離ビンの数は図に示すものよりも多いことは認められよう。
【0131】
次に図18を参照すると、ビーム毎に距離および距離レート・ビンのグラフ表示が示されている。これらのデータはこうしてメモリに格納される。各ビームは、対応する距離および距離レート・ビンを有し、ターゲットの存在を示す。図示したグラフでは、ビーム1に対して、距離ビン1ないし6が活性化され、ビーム2に対して距離ビン1ないし7が活性化され、ビーム3に対して距離ビン1ないし8が活性化され、ビーム4に対して距離ビン1ないし9が活性化され、ビーム5に対して距離ビン1ないし9が活性化され、ビーム6に対して距離ビン1ないし9が活性化され、ビーム7に対して距離ビン1ないし7が活性化され、ビーム8に対して距離ビン1ないし7が活性化される。各距離ビンに対して、当該距離ビンに可能な種々の距離レートに対応する、付加的にさまざまな距離レート・ビンがある。後者は、必要に応じて、検出ゾーンに対してある程度のカバレッジを設ける。異なる検出ゾーンが望ましい場合、異なる距離ビンを活性化し、検索してターゲットの存在を検出する。
【0132】
次に図19を参照すると、図3のDSP30のようなSODプロセッサによって実行するプロセス700のフロー図を示す。プロセス700は、検出ゾーンを規定するためにビーム毎に距離閾値を設定するステップを含む。最初に、ステップ702で示すように、検出カバレッジ・エリアの選択を行う。後者は、アラーム信号によってカバーされるセンサ周囲のカバレッジ・ゾーンを決定する。次に、ステップ704に示すように、アンテナ・ビームから1つを選択する。ステップ706において、選択したアンテナ・ビームによってカバーされる距離を選択する。この際、どの距離ビンを検索し、どの距離ビンを無視するか判定を行う。ステップ708において、アンテナ・ビームの全てが、各ビームに選択した距離ゲート値を有するか否か判定を行う。有していない場合、処理はステップ704に戻り、別のビームを選択する。ビームを全て処理し終えたなら、処理は別のルーチンに戻り、このサブルーチンを終了する。
【0133】
尚、図12のステップ574において、距離閾値を各ビーム照準角毎に確定し、検出ゾーンを規定することは認められよう。つまり、所与のビーム照準角において、SODシステムに対して遠すぎるまたは近すぎるため検出ゾーンに入らない距離検出を、予め確定してある距離閾値によって排除する。処理ステップ700は、ステップ574に含ませることができ、あるいは処理ステップ700を予め実行しておき、処理ステップ700の結果をメモリに格納し後にステップ574で用いることもできる。
【0134】
尚、図19に示すフローチャートは、レーダ・システム10(図1)において実施し、先に検討した技法に対応することは認められよう。矩形エレメント(図19のエレメント702で代表する。ここでは「処理ブロック」と呼ぶ)は、コンピュータのソフトウエア命令または命令群を表す。菱形のエレメント(図19のエレメント712で代表する。ここでは「判断ブロック」と呼ぶ)は、処理ブロックによって表されるコンピュータ・ソフトウエア命令の実行に作用する、コンピュータ・ソフトウエア命令または命令群を表す。
【0135】
あるいは、処理ブロックおよび判断ブロックは、ディジタル信号プロセッサ回路や特定用途集積回路(ASIC)のような機能的に等価な回路によって実行されるステップを表す。フロー図は、断じて特定のプログラム言語のシンタックスを示すのではない。むしろ、フロー図は、当業者が個々の装置に必要な処理を実行するための回路を製造したり、あるいはコンピュータ・ソフトウエアを生成する際に必要となる機能情報を示す。尚、ループや変数の初期化および一時変数の使用というような多くの慣例的プログラム・エレメントは示されていないことを注記しておく。ここでは、特に指示しない限り、記載する特定のステップ・シーケンスは例示に過ぎず、本発明の精神から逸脱することなく変更可能であることは、当業者には認められよう。したがって、特に明記しない限り、以下に説明するステップは、可能であれば、好都合な順序または所望の順序のいずれでもステップを実行可能である点において、順序は不問であることを意味する。
【0136】
本発明では、別のビーム数および距離ビン数も可能であることは当業者には認められようが、明確化のために、8つのビームおよびビーム当たり16個の距離ビンを用いて本プロセスを説明した。更に、用途によっては、アンテナ・ビーム全てを用いるのではなく、あるアンテナ・ビームは選択せずに、複数のアンテナ・ビームの一部のみを用いて検出カバレッジ・エリアを設ける方が望ましい場合もある。ここでは8つのビームについて説明したが、8つよりも多いビームまたは少ないビームも使用可能であることは言うまでもない。例えば、7つのビームを用いることができる。7つのビームを供給するアンテナ・システムの一例が、本願と同一日に出願し、「Switched Beam Antenna Architecture」(切換ビーム・アンテナ・アーキテクチャ)と題する同時係属中の特許出願第09/XXX,XXX号に記載されている。この出願は、本発明の授受人に譲渡され、その内容はこの言及により全体的に本願にも援用されるものとする。
【0137】
以上本発明の好適な実施形態について説明したが、その概念を組み込んだ別の実施形態も使用可能であることは、当業者には今や明白であろう。
【0138】
レーダ・システムの部分間の個々の境界は、先に説明したものから変更可能であることは、当業者には認められよう。一例として、受信機は、A/D変換器のように、電子制御回路の一部、または受信機の一部を含むこともでき、システムの電子装置部に設けることもできる。選択した種々の構成部品の実施態様に応じて、レーダ・システムの1つ以上の部分を1つ以上のハイブリッド回路、モジュール、またはサブアセンブリ上に統合することもできる。したがって、これらの実施形態は開示した実施形態に限定されるものではなく、特許請求の範囲の精神および範囲によってのみ限定されるべきである。この中で引用した全ての刊行物および文献は、その言及により、その全体が本願にも明白に含まれることとする。
【特許請求の範囲】
【請求項1】
レーダ送信機であって、
ディジタル出力ワードを供給する出力端子を有するDSPと、
前記DSPの出力端子に結合された入力端子と、アナログ・ランプ信号を供給する出力端子とを有するD/A変換器と、
前記アナログ・ランプ信号に応答する入力端子と、周波数変調信号を供給する出力端子とを有するVCOと、
を備えたレーダ送信機。
【請求項2】
請求項1記載のレーダ送信機であって、更に、前記D/A変換器の出力端子に結合された入力端子と、前記VCOの入力端子に結合された出力端子とを有する平滑化回路を備えている、レーダ送信機。
【請求項3】
請求項1記載のレーダ送信機であって、更に、前記VCOの出力端子に結合されている入力端子と、送信信号を供給する出力端子とを有するアップコンバータを備えている、レーダ送信機。
【請求項4】
請求項3記載のレーダ送信機であって、前記アップコンバータがDROを備えている、レーダ送信機。
【請求項5】
請求項1記載のレーダ送信機において、前記VCOが、
ターミネータを結合する入力端子と、出力端子とを有する増幅器と、
前記増幅器の出力端子に結合された入力端子と、周波数変調信号を供給する出力端子と、制御端子とを有する移相器と、
前記移相器の出力端子からのエネルギを前記増幅器の入力端子に結合するように配置されたDRと、
を備えているレーダ送信機。
【請求項6】
請求項1記載のレーダ送信機であって、更に、
予測送信周波数に関連付けて複数のDSP出力ワードを収容するルックアップ・テーブルを格納するメモリと、
前記周波数変調信号によって発生する送信信号の周波数を検出する周波数検出回路と、
前記検出した周波数を発生したDSP出力ワードを、前記検出した周波数に関連付けて前記ルックアップ・テーブルに格納されているDSP出力ワードと比較し、誤差値を与える比較器と、
を備えているレーダ送信機。
【請求項7】
請求項6記載のレーダ送信機において、前記周波数検出回路が、前記検出した周波数にほぼ等しい基本周波数を有するDRを備えている、レーダ送信機。
【請求項8】
請求項6記載のレーダ送信機であって、更に、前記誤差値に応答して、前記DSPの出力ワードを調節するオフセット発生器を備えている、レーダ送信機。
【請求項9】
請求項1記載のレーダ送信機であって、更に、前記アナログ・ランプ信号の少なくとも1つのパラメータを変化させる乱数発生器を備えている、レーダ送信機。
【請求項10】
請求項9記載のレーダ送信機において、前記少なくとも1つのパラメータがオフセット間隔および電圧範囲から選択される、レーダ送信機。
【請求項11】
請求項1記載のレーダ送信機において、前記送信機を輸送手段に搭載し、近接物体検出システムの横方向物体検出モジュールを備えている、レーダ送信機。
【請求項1】
レーダ送信機であって、
ディジタル出力ワードを供給する出力端子を有するDSPと、
前記DSPの出力端子に結合された入力端子と、アナログ・ランプ信号を供給する出力端子とを有するD/A変換器と、
前記アナログ・ランプ信号に応答する入力端子と、周波数変調信号を供給する出力端子とを有するVCOと、
を備えたレーダ送信機。
【請求項2】
請求項1記載のレーダ送信機であって、更に、前記D/A変換器の出力端子に結合された入力端子と、前記VCOの入力端子に結合された出力端子とを有する平滑化回路を備えている、レーダ送信機。
【請求項3】
請求項1記載のレーダ送信機であって、更に、前記VCOの出力端子に結合されている入力端子と、送信信号を供給する出力端子とを有するアップコンバータを備えている、レーダ送信機。
【請求項4】
請求項3記載のレーダ送信機であって、前記アップコンバータがDROを備えている、レーダ送信機。
【請求項5】
請求項1記載のレーダ送信機において、前記VCOが、
ターミネータを結合する入力端子と、出力端子とを有する増幅器と、
前記増幅器の出力端子に結合された入力端子と、周波数変調信号を供給する出力端子と、制御端子とを有する移相器と、
前記移相器の出力端子からのエネルギを前記増幅器の入力端子に結合するように配置されたDRと、
を備えているレーダ送信機。
【請求項6】
請求項1記載のレーダ送信機であって、更に、
予測送信周波数に関連付けて複数のDSP出力ワードを収容するルックアップ・テーブルを格納するメモリと、
前記周波数変調信号によって発生する送信信号の周波数を検出する周波数検出回路と、
前記検出した周波数を発生したDSP出力ワードを、前記検出した周波数に関連付けて前記ルックアップ・テーブルに格納されているDSP出力ワードと比較し、誤差値を与える比較器と、
を備えているレーダ送信機。
【請求項7】
請求項6記載のレーダ送信機において、前記周波数検出回路が、前記検出した周波数にほぼ等しい基本周波数を有するDRを備えている、レーダ送信機。
【請求項8】
請求項6記載のレーダ送信機であって、更に、前記誤差値に応答して、前記DSPの出力ワードを調節するオフセット発生器を備えている、レーダ送信機。
【請求項9】
請求項1記載のレーダ送信機であって、更に、前記アナログ・ランプ信号の少なくとも1つのパラメータを変化させる乱数発生器を備えている、レーダ送信機。
【請求項10】
請求項9記載のレーダ送信機において、前記少なくとも1つのパラメータがオフセット間隔および電圧範囲から選択される、レーダ送信機。
【請求項11】
請求項1記載のレーダ送信機において、前記送信機を輸送手段に搭載し、近接物体検出システムの横方向物体検出モジュールを備えている、レーダ送信機。
【図1】


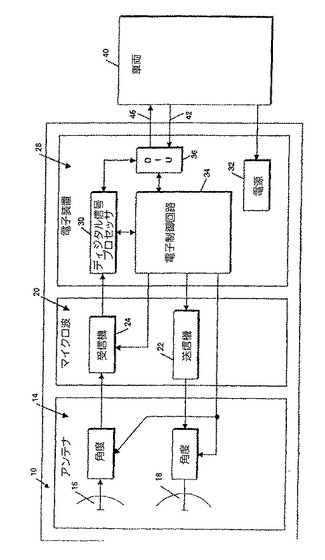
【図2】
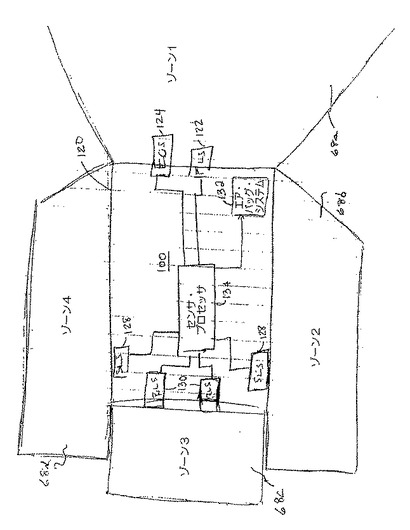
【図3】
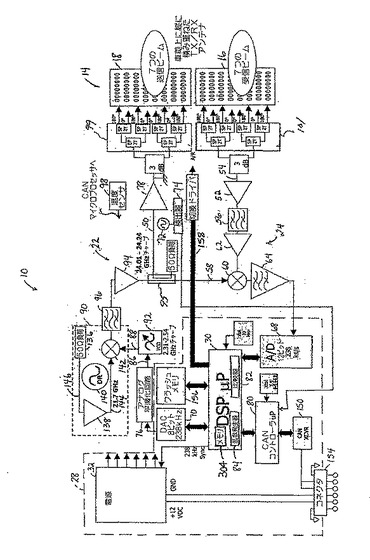
【図4】
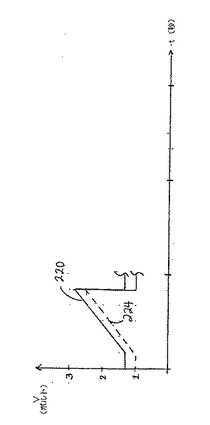
【図5】
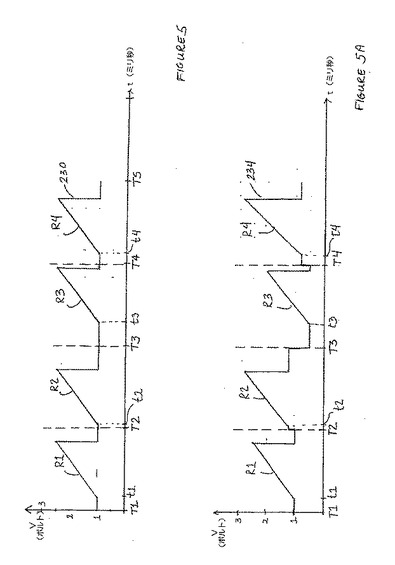
【図6】
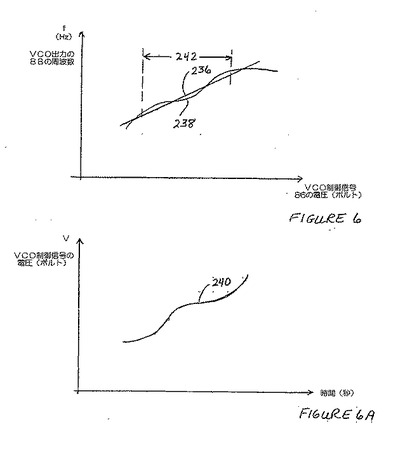
【図7】
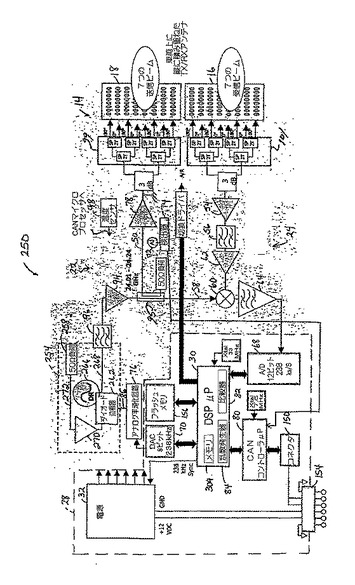
【図8】
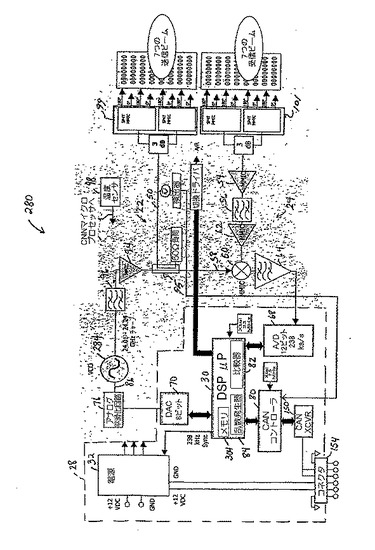
【図9】
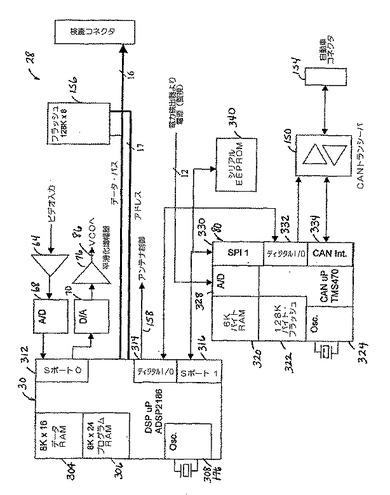
【図10】
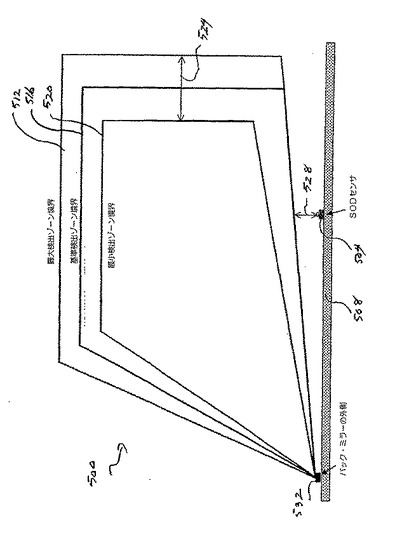
【図11】
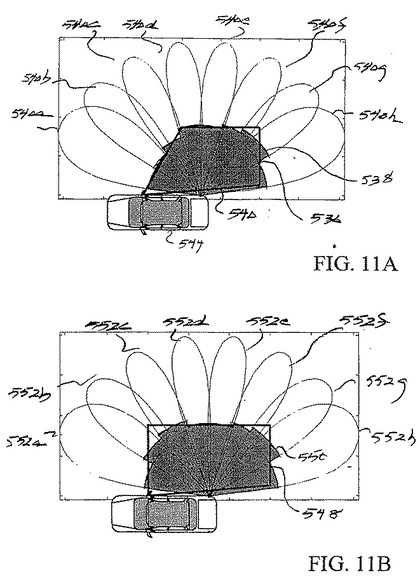
【図12】
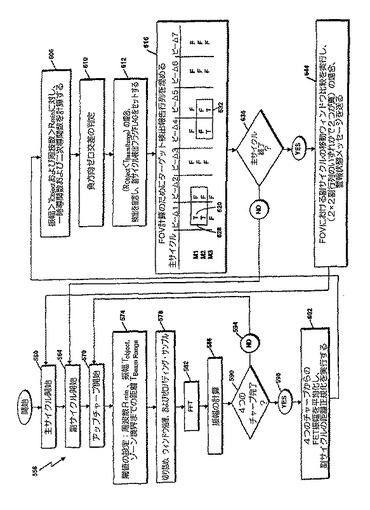
【図13】
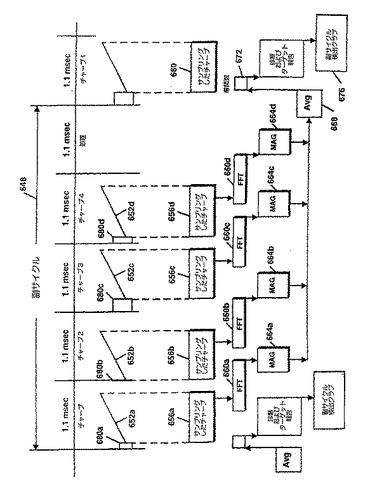
【図14】
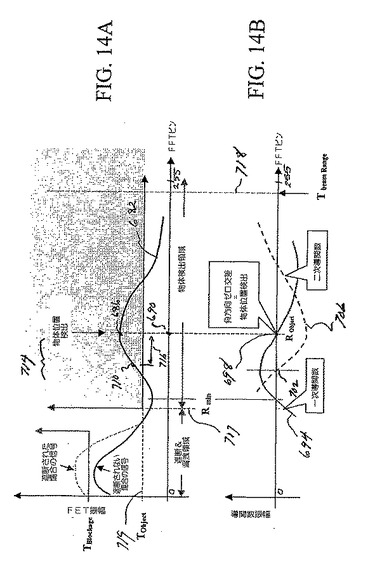
【図15】
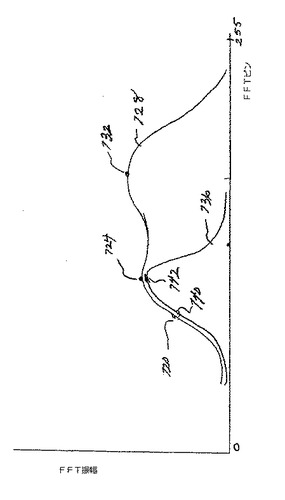
【図16】
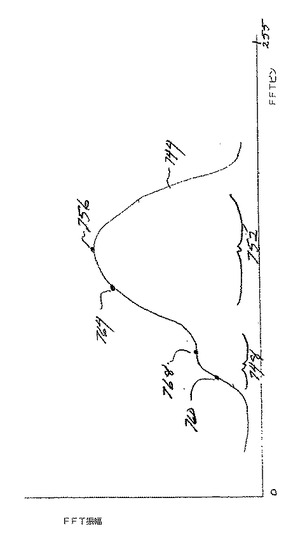
【図17】
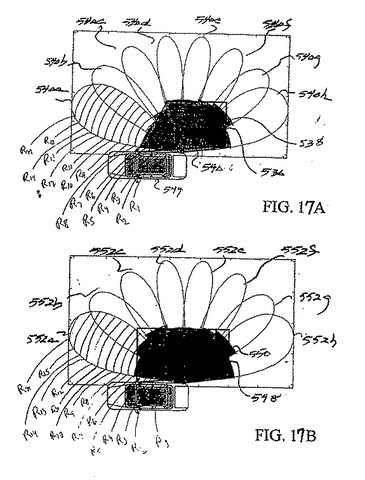
【図18】
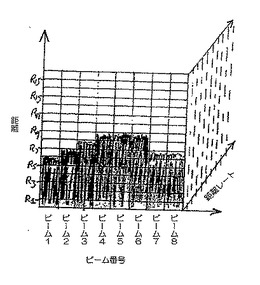
【図19】
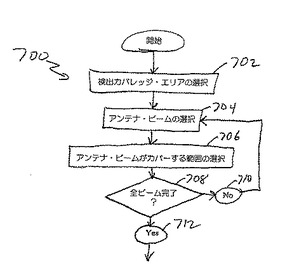
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【公開番号】特開2011−197011(P2011−197011A)
【公開日】平成23年10月6日(2011.10.6)
【国際特許分類】
【出願番号】特願2011−141674(P2011−141674)
【出願日】平成23年6月27日(2011.6.27)
【分割の表示】特願2002−519968(P2002−519968)の分割
【原出願日】平成13年8月16日(2001.8.16)
【出願人】(510244879)ヴァレオ・レイダー・システムズ・インコーポレーテッド (3)
【Fターム(参考)】
【公開日】平成23年10月6日(2011.10.6)
【国際特許分類】
【出願日】平成23年6月27日(2011.6.27)
【分割の表示】特願2002−519968(P2002−519968)の分割
【原出願日】平成13年8月16日(2001.8.16)
【出願人】(510244879)ヴァレオ・レイダー・システムズ・インコーポレーテッド (3)
【Fターム(参考)】
[ Back to top ]