
自動車用変速制御装置、変速制御方法、および変速制御プログラム
【課題】大規模なプロセッサを搭載できない車両でも、誤操作による急発進および急加速の発生を有効に防止しうる自動車用変速制御装置等を提供する。
【解決手段】車速センサ111と、前進か後退のいずれかを検出する進行方向ギアセンサ112と、アクセル開度を検出するアクセル開度センサ113と、アクセル開度に応じて備えられたエンジンの回転数を制御するスロットルコントローラ121とを予め備えるオートマチックトランスミッション方式の自動車の変速制御装置10は、通常操作情報23を予め記憶している記憶手段12と、選択された前進または後退ごとの通常操作情報に基づいてアクセル開度から通常操作情報を参照して予測速度および閾値を算出する車両速度予測部21と、実際の走行速度と予測速度の差が閾値の上下限値の範囲から外れていた場合に警報を発する誤操作判断部22とを備える。
【解決手段】車速センサ111と、前進か後退のいずれかを検出する進行方向ギアセンサ112と、アクセル開度を検出するアクセル開度センサ113と、アクセル開度に応じて備えられたエンジンの回転数を制御するスロットルコントローラ121とを予め備えるオートマチックトランスミッション方式の自動車の変速制御装置10は、通常操作情報23を予め記憶している記憶手段12と、選択された前進または後退ごとの通常操作情報に基づいてアクセル開度から通常操作情報を参照して予測速度および閾値を算出する車両速度予測部21と、実際の走行速度と予測速度の差が閾値の上下限値の範囲から外れていた場合に警報を発する誤操作判断部22とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自動車用変速制御装置、変速制御方法、および変速制御プログラムに関し、特に自動車の誤操作による急発進および急加速の発生を有効に防止しうる変速制御装置などに関する。
【背景技術】
【0002】
自動車の変速制御機構には、大きく分けてマニュアルトランスミッション(MT)とオートマチックトランスミッション(AT)という2通りの方式があるが、社団法人日本自動車販売協会連合会による統計では、西暦2009年に日本国内で販売された乗用車のうちの約98%がATを搭載した車(以後AT車という)である。この割合は年を追うごとに増加している。
【0003】
AT車は、運転者がブレーキペダルとアクセルペダルとを踏み間違え、ブレーキペダルを踏んだつもりでアクセルペダルを踏み込むと、その変速制御特性上、急発進や急加速が生じやすい。また、運転者がシフトレバーで前進を選択したつもりで後退を選択、あるいは後退を選択したつもりで前進を選択したというようなシフトレバーの選択間違いでも、同じように急発進や急加速が生じやすい。
【0004】
これらのような誤操作によって発生したと考えられる交通事故は、財団法人交通事故総合分析センターによる日本国内の西暦2009年の統計(非特許文献1)では年間43,897件、その中でもブレーキペダルとアクセルペダルとの踏み間違いによるものだけで年間6,577件発生している。また、誤操作による車両の暴走は、発生場所によっては(たとえば立体駐車場、コンビニエンスストアなど)第三者を巻き込んだ惨事になる可能性がある。このため、AT車の誤操作による急発進および急加速の発生を防止する機構が求められている。
【0005】
これに関連する技術として、次の各々がある。その中でも特許文献1には、アクセル開度に応じて車両に減速度を付与する減速度制御装置で、減速度の設定値と実測値とを比較して異常を検知するという技術が記載されている。特許文献2には、自車と自車の前の障害物との距離を検知し、運転者がアクセルを急激に開いた時に該障害物との衝突を回避するという衝突防止制御装置が記載されている。
【0006】
特許文献3には、電気自動車の車両が後退時に必要以上に加速されないように速度を制限するという技術が記載されている。特許文献4には、車両の後退時にスロットル開度を制限するという速度制御方法が記載されている。特許文献5には、カーナビゲーションで特定の運転者の操作情報を記憶し、これによって速度制御を含む各種制御を実現するという車両制御装置が記載されている。特許文献6には、自車の前の障害物との距離と、運転者が示す誤発進前兆挙動を検出して誤発進を防止するという自動車制御システムが記載されている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2001−310716号公報
【特許文献2】特開2004−280489号公報
【特許文献3】実開平05−095109号公報
【特許文献4】特開2004−106677号公報
【特許文献5】特開2008−168865号公報
【特許文献6】特開2010−023769号公報
【非特許文献】
【0008】
【非特許文献1】イタルダ・インフォメーション86号「運転操作の誤りを防ぐ」、平成22年12月、財団法人交通事故総合分析センター(ITARDA)、[平成23年6月8日検索]、インターネット<URL:http://www.itarda.or.jp/itardainfomation/info86.pdf>
【発明の概要】
【発明が解決しようとする課題】
【0009】
急発進および急加速の発生を防止するために、AT車には、アクセルペダルの開度を検知し、運転者が急激にアクセルペダルを踏み込んだ場合にエンジンを停止する機構を備えたものが多くなっている。しかしながら、このような機構では、シフトレバーの前進と後退を間違えた場合の誤操作を防止できない。特許文献1,3,4,5に記載の技術でも、これと同様である。
【0010】
また、特許文献2,6などのように、自車と障害物との間の距離を検知するセンサや、運転者の挙動をカメラを介して検知する画像検知技術などを利用して、運転者の誤操作を検出する技術はあるが、これらのような技術には高価なセンサや、高度な検知処理が可能な大規模のプロセッサが必要となり、これらの装置を駆動するためにバッテリなどの電力系統の強化も必要となる。従って、このような技術は自動車の高価格化を招くものであり、全ての自動車に対して搭載できるものではない。
【0011】
本発明の目的は、大規模なプロセッサを搭載できない車両でも、AT車のシフトレバーの前進と後退の間違いを含んだ誤操作による急発進および急加速の発生を有効に防止しうる自動車用変速制御装置、変速制御方法、および変速制御プログラムを提供することにある。
【課題を解決するための手段】
【0012】
上記目的を達成するため、本発明に係る変速制御装置は、走行速度を検出する車速センサと、運転者がシフトレバーで前進か後退のいずれの進行方向を選択しているかを検出する進行方向ギアセンサと、運転者のアクセルペダルを踏み込んでいる量をアクセル開度として検出するアクセル開度センサと、アクセル開度に応じて備えられたエンジンの回転数を制御するスロットルコントローラとを予め備えるオートマチックトランスミッション方式の自動車用変速制御装置であって、進行方向ごとにアクセル開度に応じて通常得られる走行速度である予測速度および閾値の上下限値についての情報である通常操作情報を予め記憶している操作情報記憶手段と、選択された進行方向の通常操作情報に基づいてアクセル開度から通常操作情報を参照して予測速度および閾値を算出する車両速度予測部と、実際の走行速度と予測速度の差が閾値の上下限値の範囲から外れている場合に警報を発する誤操作判断部とを備えることを特徴とする。
【0013】
上記目的を達成するため、本発明に係る変速制御方法は、走行速度を検出する車速センサと、運転者がシフトレバーで前進か後退のいずれの進行方向を選択しているかを検出する進行方向ギアセンサと、運転者のアクセルペダルを踏み込んでいる量をアクセル開度として検出するアクセル開度センサと、アクセル開度に応じて備えられたエンジンの回転数を制御するスロットルコントローラとを予め備えるオートマチックトランスミッション方式の自動車用変速制御装置にあって、進行方向ごとにアクセル開度に応じて通常得られる走行速度である予測速度および閾値の上下限値についての情報である通常操作情報を操作情報記憶手段に予め記憶し、選択された進行方向の通常操作情報に基づいて車両速度予測部がアクセル開度から通常操作情報を参照して予測速度および閾値を算出し、実際の走行速度と予測速度の差が閾値の上下限値の範囲から外れているか否かを誤操作判断部が判定すると共に当該走行速度がこの範囲から外れていた場合に警報を発することを特徴とする。
【0014】
上記目的を達成するため、本発明に係る変速制御プログラムは、走行速度を検出する車速センサと、運転者がシフトレバーで前進か後退のいずれの進行方向を選択しているかを検出する進行方向ギアセンサと、運転者のアクセルペダルを踏み込んでいる量をアクセル開度として検出するアクセル開度センサと、アクセル開度に応じて備えられたエンジンの回転数を制御するスロットルコントローラとを予め備えるオートマチックトランスミッション方式の自動車用変速制御装置にあって、変速制御装置が備えているコンピュータに、進行方向ごとに操作情報記憶手段に予め記憶されたアクセル開度に応じて通常得られる走行速度である予測速度および閾値の上下限値についての情報である通常操作情報を参照してアクセル開度から予測速度および閾値を算出する手順、および実際の走行速度と予測速度の差が閾値の上下限値の範囲から外れているか否かを判定すると共に当該走行速度がこの範囲から外れていた場合に警報を発する手順を実行させることを特徴とする。
【発明の効果】
【0015】
本発明は、上記したように、前進または後退ごとの通常操作情報に基づいてアクセル開度から予測速度および閾値を算出し、これと実際の走行速度とを比較して異常である否かを判定するように構成したので、シフトレバーの前進と後退を間違えた場合にもその誤操作を検出でき、かつ特別なセンサや演算処理を必要とせずに誤操作を検出できる。これによって、大規模なプロセッサを搭載できない車両でも、AT車のシフトレバーの前進と後退の間違いを含んだ誤操作による急発進および急加速の発生を有効に防止できるという優れた特徴を持つ自動車用変速制御装置、変速制御方法、および変速制御プログラムを提供することができる。
【図面の簡単な説明】
【0016】
【図1】図2で示した変速制御装置のより詳しい構成について示す説明図である。
【図2】本発明の第1の実施形態に係る変速制御装置を搭載した自動車の構成を示す説明図である。
【図3】図1で示した車両速度予測部および誤操作判断部の動作を示すフローチャートである。
【図4】図1に示した通常操作情報として記憶されている、アクセル開度Accpと車両速度Vspの関係について示すグラフである。図4(a)は前進時、図4(b)は後退時の場合についてそれぞれ示す。
【図5】本発明の第2の実施形態に係る変速制御装置を搭載した自動車の構成を示す説明図である。
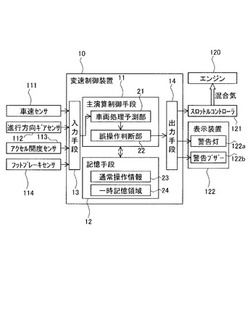
【図6】図5で示した変速制御装置のより詳しい構成について示す説明図である。
【発明を実施するための形態】
【0017】
(第1の実施形態)
以下、本発明の実施形態の構成について添付図1〜2に基づいて説明する。
最初に、本実施形態の基本的な内容について説明し、その後でより具体的な内容について説明する。
本実施形態に係る自動車用変速制御装置(変速制御装置10)は、走行速度を検出する車速センサ111と、運転者がシフトレバーで前進か後退かのいずれを選択しているかを検出する進行方向ギアセンサ112と、運転者のアクセルペダルを踏み込んでいる量をアクセル開度として検出するアクセル開度センサ113と、アクセル開度に応じて備えられたエンジンの回転数を制御するスロットルコントローラ121とを予め備えるオートマチックトランスミッション方式の自動車100の変速制御装置である。この変速制御装置10は、前進または後退ごとにアクセル開度に応じて通常得られる走行速度である予測速度および閾値についての情報である通常操作情報23を予め記憶している操作情報記憶手段(記憶手段12)と、選択された前進または後退ごとの通常操作情報に基づいてアクセル開度から通常操作情報を参照して予測速度および閾値を算出する車両速度予測部21と、実際の走行速度と予測速度の差が閾値の上下限値の範囲から外れている場合に警報を発する誤操作判断部22とを備える。
【0018】
また、運転者がブレーキペダルを踏んでいるか否かを検出するフットブレーキセンサ114を自動車100が予め備えると共に、誤操作判断部22が、警報を発しても運転者がブレーキペダルを踏まない場合に、エンジンの回転数を減少させるようスロットルコントローラ121を制御する機能を備える。さらに、誤操作判断部22は、実際の走行速度と予測速度の差が閾値の上下限値の範囲から外れていない場合に、通常操作情報23に実際の走行速度を含めて記憶させる機能を備える。
【0019】
以上の構成を備えることにより、本実施形態の変速制御装置10は、大規模なプロセッサを搭載できない車両でも、AT車の誤操作による急発進および急加速の発生を有効に防止できるものとなる。
以下、これをより詳細に説明する。
【0020】
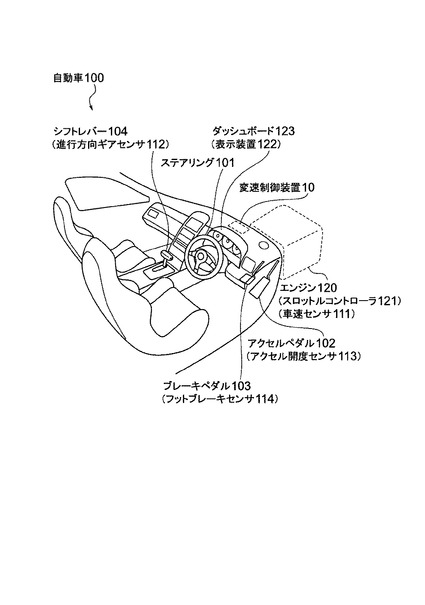
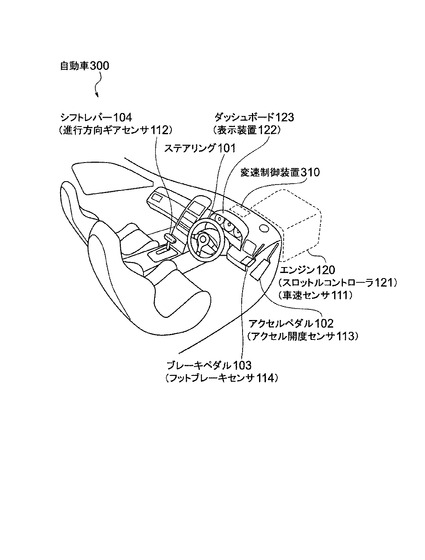
図2は、本発明の第1の実施形態に係る変速制御装置10を搭載した自動車100の構成を示す説明図である。図2は、自動車100の運転席周辺の内装部分について主に示している。
【0021】
自動車100は、一般的な自動車と同様に、ステアリング101、アクセルペダル102、ブレーキペダル103、シフトレバー104などのような操縦機構を搭載しているが、それと共に、車速センサ111、進行方向ギアセンサ112、アクセル開度センサ113、フットブレーキセンサ114といった、自動車100の現在の運転状況を検知するセンサが車体の各所に搭載されている。
【0022】
また、自動車100のフロントウィンドウ下〜運転席正面に配置されたダッシュボード123には、自動車100の現在の状況を示す計器類(スピードメーター、タコメーター、燃料計など)が多数配置されているが、この中には変速制御装置10から出力される情報を運転者に対して提示する表示装置122も含まれる。
【0023】
車速センサ111は、タイヤの回転などから現在の自動車100が走っている速度を検知して、これを電圧信号として出力する。進行方向ギアセンサ112は、運転者がシフトレバー104で前進か後退のいずれを選択しているかを電圧信号として出力する。アクセル開度センサ113は、運転者がアクセルペダル102を踏み込んでいる量(開度)を検知して、これを電圧信号として出力する。フットブレーキセンサ114は、運転者がブレーキペダル103を踏んでいるか否かを電圧信号として出力する。これらのセンサから出力されるアナログの物理量が、変速制御装置10に入力される。
【0024】
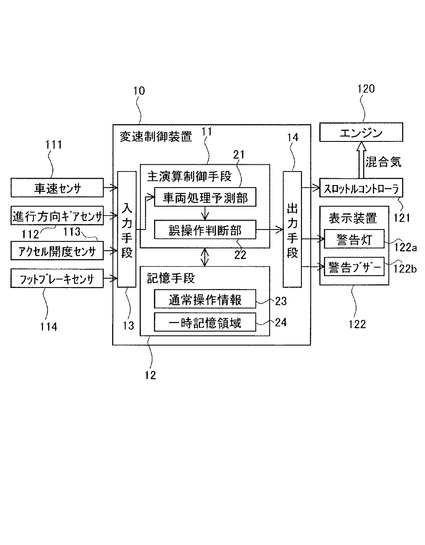
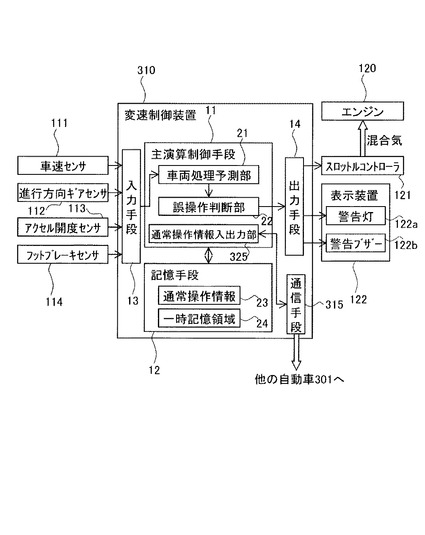
図1は、図2で示した変速制御装置10のより詳しい構成について示す説明図である。変速制御装置10は、自動車100に搭載される車載コンピュータであり、コンピュータプログラムを実行する主体である主演算制御手段(CPU,Central Processing Unit)11と、各種データを予め記憶している記憶手段12と、前述の自動車100に搭載されている各センサで検出された運転状況を示すアナログの物理量を主演算制御手段11で処理可能なデジタルの数値に変換する入力手段13と、主演算制御手段11から出力されたデジタルの数値をアナログの物理量に変換して出力する出力手段14とを備える。
【0025】
入力手段13は、車速センサ111およびアクセル開度センサ113から出力される電圧信号を、各々時速(km/h)および百分率(パーセンテージ)を単位とするアクセル開度に変換する。また入力手段13は、進行方向ギアセンサ112から出力される電圧信号を、シフトレバー104が前進と後退のいずれが選択されているかを示す2値信号に変換する。フットブレーキセンサ114から出力される電圧信号についても同様に、運転者がブレーキを踏んでいるか否かを示す2値信号に変換する。
【0026】
出力手段14からは、自動車100の動力源であるエンジン120に対して供給される燃料を含む混合気の流量を調整してエンジン120の回転数を制御するスロットルコントローラ121と、前述の表示装置122に対して情報が出力される。表示装置122には、ランプによって運転者に警告を発する警告灯122aと、警告音を発する警告ブザー122bが含まれている。
【0027】
主演算制御手段11は、変速制御プログラムが動作することにより、入力された運転操作の情報から運転者が意図している車両速度を予測する車両速度予測部21、およびその操作が運転者の意図したものであるか否かを判断する誤操作判断部22として動作する。また、記憶手段12では、運転者の通常の運転操作についての情報である通常操作情報23が記憶され、さらに一時的な情報を記憶する一時記憶域24も確保されている。これらの詳細については後述する。また、通常操作情報23および一時記憶域24の具体的なデータ形式は、任意のものでよい。
【0028】
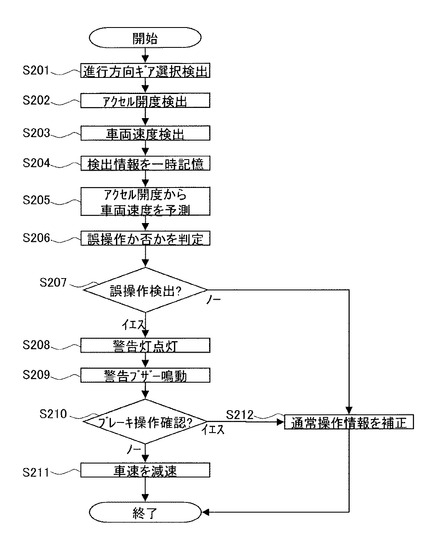
図3は、図1で示した車両速度予測部21および誤操作判断部22の動作を示すフローチャートである。運転者が自動車100の運転を開始すると、車両速度予測部21がまず、進行方向ギアセンサ112の出力信号から、運転者が選択した進行方向が前進であるか後退であるかを検出し(ステップS201)、引き続いてアクセル開度センサ113の出力信号から、運転者が行っているアクセルペダル102の踏み込みをアクセル開度Accpとして検出する(ステップS202)。
【0029】
これに引き続いて車両速度予測部21はさらに、車速センサ111の出力信号から、運転者のアクセルペダル102の操作結果として得られている現在の車両速度Vsp(*)を検出する(ステップS203)。以上のステップS201〜203で検出されたアクセル開度Accp、車両速度Vsp、および進行方向(前進または後退)を、車両速度予測部21は記憶手段12の一時記憶域24に記憶させる(ステップS204)。
【0030】
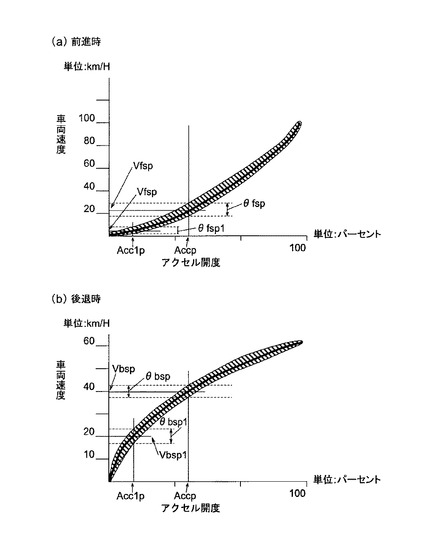
そして車両速度予測部21は、アクセル開度Accpおよび進行方向から、車両速度予測の処理を行う(ステップS205)。図4は、図1に示した通常操作情報23として進行方向ごとに記憶されている、アクセル開度Accpと車両速度Vspの関係について示すグラフである。図4(a)は前進時、図4(b)は後退時の場合についてそれぞれ示す。
【0031】
図4に示した通常操作情報23は、アクセル開度Accpと、これに対応して実測された車両速度Vspの平均との間の関係を示すものである。アクセル開度Accpについては、アクセルの踏み込み量、およびアクセルを踏み込むために必要な力は車両ごとに異なるものであるので、その車両の踏み込み可能なストロークに対するアクセル開度のパーセンテージである。車両速度Vspは実測値である。
【0032】
また、通常操作情報23は個々の運転者の習慣などに依存するものであるので、運転者ごとに異なる通常操作情報23を記憶できるよう、運転者ごとの記憶域を記憶手段12に確保することがより望ましい。この場合、実際の運転者を識別するために、たとえばキーレスエントリーシステム用の発信器が運転者識別用の信号を発信するようにしてもよいし、また表示装置122を含むダッシュボード123に運転者切替用のスイッチを付けてもよい。
【0033】
図4(a)に示した前進時の場合について説明すると、車両速度予測部21はステップS202で得られたアクセル開度Accpを図4(a)の曲線に適用して、運転者の意図する車両速度である予測速度Vfspを得る。
【0034】
ただし、実際の車両速度はアクセル開度に応じて常に一定となるものではなく、路面状況(降雨や舗装の有無など)、重量(乗車人数や荷物の積載量など)、地形(勾配など)やその他の要素によって変動しうるものであるので、その変動分に伴う閾値θfspも図4(a)の曲線には同時に設定されている。この閾値θfspの上限値と下限値との間の幅は、予測速度が低い場合には大きく、予測速度が高くなるにつれて小さくなるように設定されている。
【0035】
図4(a)で、アクセル開度がAccp=40%である場合には、予測速度Vfspとして時速約22km、閾値θfspを含む予測速度Vfspの許容変動範囲として時速約17〜30kmという予測結果が得られる。また、アクセル開度がAcc1p=10%である場合には、許容変動範囲を含む予測速度Vfspは時速約10km以下という予測結果が得られる。
【0036】
図4(b)に示した後退時の場合も、前進時と同様ではあるが、図4(a)と同一のアクセル開度AccpおよびAcc1pで得られる予測速度は、前進時と比べて高くなる。図4(b)に示した曲線によると、アクセル開度がAccp=40%である場合には、予測速度Vbspが時速約40km、閾値θbspを含む許容変動範囲が時速約36〜43kmという予測結果になる。また、アクセル開度がAcc1p=10%である場合には、予測速度Vbspが時速約20km、許容変動範囲が時速約15〜25kmという予測結果になる。
【0037】
車両速度予測部21は、以上の処理結果、即ちアクセル開度Accp、車両速度Vsp(*)、進行方向、および予測速度Vfsp(後退時はVbsp)とその閾値θfsp(後退時はθbsp)とを、誤操作判断部22に渡す。
【0038】
図3に戻って、ステップS205までの処理結果を車両速度予測部21から受け取った誤操作判断部22は、運転者の操作が誤操作であるか否かを判断する(ステップS206〜207)。
【0039】
進行方向ギアセンサ112から出力された運転者の選択したシフトレバー104の状態が前進である場合には、車両速度Vsp(*)が予測速度Vfsp+閾値θfspの範囲の上限値を上回っていれば、誤操作判断部22はこれを誤操作と判断する。また、シフトレバー104の状態が後退である場合には、車両速度Vsp(*)が予測速度Vbsp+閾値θbspの範囲の上限値を上回っていれば、誤操作判断部22はこれを誤操作と判断する。ここで「車両速度Vsp(*)」の「(*)」は、実測された速度を示す記号である。
【0040】
これをより具体的に説明する。シフトレバー104の状態が前進であり、かつアクセル開度Accp=40%である場合、図4(a)の曲線から、運転者の通常の操作では予測速度Vfsp=約22kmを運転者は意図しているものと判断できる。閾値θfspを含む予測速度Vfspの許容変動範囲は、時速約17〜30kmである。
【0041】
しかしながら、これに対して実際にステップS203で検出された車両速度Vsp(*)が、この範囲の上限値=時速約30kmを上回っている場合、またはこの範囲の下限値=時速約17kmを下回っている場合、運転者のアクセル操作が過大もしくは過小であるため、ブレーキペダル103を踏むつもりでアクセルペダル102を踏み込んでしまったなどのような誤操作であると判断可能である。
【0042】
また、運転者が前進を意図しているにもかかわらずシフトレバー104の状態を誤って後退とした場合、後退時の変速比は前進時と比べて高く、かつ後退時には自動変速が発生しないことより、車両の静止状態からの発進の時の同一のアクセル開度Accpに対する後退時の車両速度は、前進時と比べて高い。即ち、Vbsp>Vfspとなる。
【0043】
たとえば、図4(a)および(b)に示した曲線で、同一のAccp1=10%に対して、Vfsp=時速約10km以下、Vbsp=時速約20km(許容変動範囲が時速約15〜25km)となる。
【0044】
このため、シフトレバー104の状態が前進でありかつVsp(*)>時速10km以上である状態、あるいはシフトレバー104の状態が後退でありVsp(*)が時速15km以下もしくは25km以上ある状態も、運転者の意図した車両速度でない可能性が高いので、誤操作であると判断可能である。
【0045】
誤操作判断部22は、上記の基準によって運転者の操作が誤操作であると判断した場合には後述のステップS208に進む。誤操作ではないと判断した場合には、後述のステップS212に進む。
【0046】
誤操作を検出した誤操作判断部22は、出力手段14を介して表示装置122の警告灯122aを点灯させ(ステップS208)、また警告ブザー122bを鳴動させる(ステップS209)。そして、運転者がこれに反応して誤操作を確認し、アクセルペダル102の開度を減少させてブレーキペダル103を踏んだか否かを、アクセル開度センサ113およびフットブレーキセンサ114を介して検出する(ステップS210)。
【0047】
運転者がアクセルペダル102の開度を減少させ、かつブレーキペダル103を踏む操作をしていれば、運転者は減速を意図した運転操作を行ったと判断できるので、平常の運転操作時と同様に、アクセル開度Accpに応じて減少したスロットル開度をスロットルコントローラ121に対して出力して、後述のステップS212に進む。
【0048】
ステップS210で、アクセルペダル102の開度を減少させ、かつブレーキペダル103を踏むという操作が確認できなかった場合、誤操作判断部22は強制的に減少したスロットル開度をスロットルコントローラ121に対して出力して、車両速度を強制的に減速させて処理を終了する(ステップS211)。
【0049】
前述したステップS207で、運転者の操作が誤操作でないと判断された場合、もしくはステップS210でブレーキペダル103を踏んだと判断された場合、誤操作判断部22は、通常操作情報23として記憶された情報の、アクセル開度Accpに対して実際に観測された車両速度Vsp(*)の、過去の運転履歴に含めた平均値を予測速度VfspもしくはVbspの値とする(ステップS212)。この場合、閾値θfspの上限値と下限値との間の幅は変更されない。
【0050】
(実施形態の全体的な動作)
次に、上記の実施形態の全体的な動作について説明する。
本実施形態に係る変速制御方法は、走行速度を検出する車速センサと、運転者がシフトレバーで前進か後退かのいずれを選択しているかを検出する進行方向ギアセンサと、運転者のアクセルペダルを踏み込んでいる量をアクセル開度として検出するアクセル開度センサと、アクセル開度に応じて備えられたエンジンの回転数を制御するスロットルコントローラとを予め備えるオートマチックトランスミッション方式の自動車100の変速制御装置10にあって、前進または後退ごとにアクセル開度に応じて通常得られる走行速度である予測速度および閾値の上下限値についての情報である通常操作情報を操作情報記憶手段に予め記憶し、選択された前進または後退ごとの通常操作情報に基づいて車両速度予測部がアクセル開度から通常操作情報を参照して予測速度および閾値を算出し(図3・ステップS205)、実際の走行速度と予測速度の差が閾値の上下限値の範囲から外れているか否かを誤操作判断部が判定する(図3・ステップS206〜207)と共に当該走行速度がこの範囲から外れていた場合に警報を発する(図3・ステップS208〜209)。
【0051】
ここで、上記各動作ステップについては、これをコンピュータで実行可能にプログラム化し、これらを前記各ステップを直接実行する変速制御装置10に実行させるようにしてもよい。本プログラムは、非一時的な記録媒体、例えば、DVD、CD、フラッシュメモリ等に記録されてもよい。その場合、本プログラムは、記録媒体からコンピュータによって読み出され、実行される。
この動作により、本実施形態は以下のような効果を奏する。
【0052】
本発明に係る動作は、距離センサなどのような特殊なハードウェアを必要とせず、また画像処理などのような高度な演算処理を必要としない。ただ、単純なデジタル→アナログ変換およびアナログ→デジタル変換のみで実現可能であるので、ハードウェアは安価で済む。またプロセッサにも高度な演算処理が要求されないので、これも安価で済む。
【0053】
それでいて、予測速度と実際の走行速度を比較することにより、運転者の誤操作を的確に検出可能である。特に、シフトレバーの選択間違いや、ブレーキペダルとアクセルペダルとの踏み間違いなどのような、重大な事故につながりやすい誤操作を的確に検出して警報を発し、そのような事故を有効に予防することができる。
【0054】
また、通常操作情報はそれぞれの運転者の普段の運転操作に基づくものであるので、全ての運転者に対して同一の検出基準を適用する場合よりも、誤操作を的確に検出可能である。たとえば、ある運転者にとっては急加速となる運転操作であっても、別の運転者にとっては通常の運転操作の範囲内である場合もありうるが、本実施形態では、そのような場合でも、誤操作であるか否かを的確に検出できる。
【0055】
(第2の実施形態)
本発明の第2の実施形態に係る変速制御装置310は、第1の実施形態の構成に加えて、通常操作情報を、同系車種の他の自動車においても利用可能なデータとして出力する通常操作情報入出力部325を備える構成とした。
【0056】
この構成を取ることにより、本実施形態では、運転者が通常運転する自動車とは異なる同系車種の自動車においても、運転者の操作の癖から誤操作を有効に検出できるという第1の実施形態と同じ効果を得ることができる。
以下、これをより詳しく解説する。
【0057】
図5は、本発明の第2の実施形態に係る変速制御装置310を搭載した自動車300の構成を示す説明図である。自動車300は、前述の第1の実施形態に係る自動車100と同一の構成を備えており、ただ変速制御装置10のみが別の変速制御装置310に置換されている。従って、これ以外の要素については全て第1の実施形態と同一の名称および参照番号でいう。
【0058】
図6は、図5で示した変速制御装置310のより詳しい構成について示す説明図である。変速制御装置310の構成も、図1で示した第1の実施形態に係る変速制御装置10とほぼ同一であり、ただハードウェアとして通信手段315が追加され、そして主演算制御手段11で動作するソフトウェアとしては通常操作情報入出力部325が追加されているのみである。従って、これ以外の要素については全て第1の実施形態と同一の名称および参照番号でいう。
【0059】
通常操作情報入出力部325は、記憶手段12に記憶された通常操作情報23を他の自動車によって読み込み可能なデータ形式に書き出してこれを通信手段315を介して出力する、あるいは他の自動車から書き出された通常操作情報を通信手段315を介して自車(自動車300)で使用可能なように取り込んで通常操作情報23として記憶手段12に記憶させる機能を有する。ここで、通常操作情報23の具体的なデータ形式は任意のものでよい。
【0060】
また、自車(自動車300)と他の自動車との間で通信手段315を利用して通常操作情報23のデータを交換する方法も、現在知られている任意の方法を利用することができる。たとえば、携帯電話を利用して無線通信網やインターネット等を介して当該データを転送してもよいし、その際にサーバコンピュータに一時的に当該データを記憶させてもよい。また、USBフラッシュメモリ等のような記憶媒体を接続して、これによって当該データを複写してもよい。
【0061】
これによって、運転者が普段運転する車両とは異なる同系車種の車両に乗ることがあっても、その車両に普段からの通常操作情報23を反映させて動作させることができる。前述したように、通常操作情報23はパーセント単位でのアクセル開度Accpに車両速度Vsp(*)を関連づけたものであるので、たとえばレバーの堅さなどのような車両個々の機械的特性による影響が比較的少なく、従って同系車種であれば異なる車両に対しても容易に適用可能なものである。
【0062】
これまで本発明について図面に示した特定の実施形態をもって説明してきたが、本発明は図面に示した実施形態に限定されるものではなく、本発明の効果を奏する限り、これまで知られたいかなる構成であっても採用することができる。
【0063】
上述した実施形態について、その新規な技術内容の要点をまとめると、以下のようになる。なお、上記実施形態の一部または全部は、新規な技術として以下のようにまとめられるが、本発明は必ずしもこれに限定されるものではない。
【0064】
(付記1) 走行速度を検出する車速センサと、運転者がシフトレバーで前進か後退のいずれの進行方向を選択しているかを検出する進行方向ギアセンサと、運転者のアクセルペダルを踏み込んでいる量をアクセル開度として検出するアクセル開度センサと、前記アクセル開度に応じて備えられたエンジンの回転数を制御するスロットルコントローラとを予め備えるオートマチックトランスミッション方式の自動車用変速制御装置であって、
前記進行方向ごとに前記アクセル開度に応じて通常得られる走行速度である予測速度および閾値の上下限値についての情報である通常操作情報を予め記憶している操作情報記憶手段と、
選択された前記進行方向の前記通常操作情報に基づいて前記アクセル開度から前記通常操作情報を参照して前記予測速度および前記閾値を算出する車両速度予測部と、
実際の前記走行速度と前記予測速度の差が前記閾値の上下限値の範囲から外れている場合に警報を発する誤操作判断部と
を備えることを特徴とする自動車用変速制御装置。
【0065】
(付記2) 前記運転者がブレーキペダルを踏んでいるか否かを検出するフットブレーキセンサを前記自動車が予め備えると共に、
前記誤操作判断部が、前記警報を発しても前記運転者が前記ブレーキペダルを踏まない場合に、前記エンジンの回転数を減少させるよう前記スロットルコントローラを制御する機能を備えることを特徴とする、付記1に記載の変速制御装置。
【0066】
(付記3) 前記誤操作判断部が、実際の前記走行速度と前記予測速度の差が前記閾値の上下限値の範囲から外れていない場合に、前記通常操作情報に実際の前記走行速度を含めて記憶させる機能を備えることを特徴とする、付記1に記載の変速制御装置。
【0067】
(付記4)前記通常操作情報を、同系車種の他の自動車においても利用可能なデータとして出力する通常操作情報入出力部を備えることを特徴とする、付記1に記載の変速制御装置。
【0068】
(付記5) 走行速度を検出する車速センサと、運転者がシフトレバーで前進か後退のいずれの進行方向を選択しているかを検出する進行方向ギアセンサと、運転者のアクセルペダルを踏み込んでいる量をアクセル開度として検出するアクセル開度センサと、前記アクセル開度に応じて備えられたエンジンの回転数を制御するスロットルコントローラとを予め備えるオートマチックトランスミッション方式の自動車用変速制御装置にあって、
前記進行方向ごとに前記アクセル開度に応じて通常得られる走行速度である予測速度および閾値の上下限値についての情報である通常操作情報を操作情報記憶手段に予め記憶し、
選択された前記進行方向の前記通常操作情報に基づいて車両速度予測部が前記アクセル開度から前記通常操作情報を参照して前記予測速度および前記閾値を算出し、
実際の前記走行速度と前記予測速度の差が前記閾値の上下限値の範囲から外れているか否かを誤操作判断部が判定すると共に当該走行速度がこの範囲から外れていた場合に警報を発する
ことを特徴とする自動車用変速制御方法。
【0069】
(付記6) 走行速度を検出する車速センサと、運転者がシフトレバーで前進か後退のいずれの進行方向を選択しているかを検出する進行方向ギアセンサと、運転者のアクセルペダルを踏み込んでいる量をアクセル開度として検出するアクセル開度センサと、前記アクセル開度に応じて備えられたエンジンの回転数を制御するスロットルコントローラとを予め備えるオートマチックトランスミッション方式の自動車用変速制御装置にあって、
前記変速制御装置が備えているコンピュータに、
前記進行方向ごとに操作情報記憶手段に予め記憶された前記アクセル開度に応じて通常得られる走行速度である予測速度および閾値の上下限値についての情報である通常操作情報を参照して前記アクセル開度から前記予測速度および前記閾値を算出する手順、
および実際の前記走行速度と前記予測速度の差が前記閾値の上下限値の範囲から外れているか否かを判定すると共に当該走行速度がこの範囲から外れていた場合に警報を発する手順
を実行させることを特徴とする自動車用変速制御プログラム。
【産業上の利用可能性】
【0070】
本発明は、オートマチックトランスミッション方式の自動車において一般的に適用可能である。
【符号の説明】
【0071】
10、310 変速制御装置
11 主演算制御手段
12 記憶手段
13 入力手段
14 出力手段
21 車両速度予測部
22 誤操作判断部
23 通常操作情報
24 一時記憶域
100、300 自動車
101 ステアリング
102 アクセルペダル
103 ブレーキペダル
104 シフトレバー
111 車速センサ
112 進行方向ギアセンサ
113 アクセル開度センサ
114 フットブレーキセンサ
120 エンジン
121 スロットルコントローラ
122 表示装置
122a 警告灯
122b 警告ブザー
123 ダッシュボード
315 通信手段
325 通常操作情報入出力部
【技術分野】
【0001】
本発明は、自動車用変速制御装置、変速制御方法、および変速制御プログラムに関し、特に自動車の誤操作による急発進および急加速の発生を有効に防止しうる変速制御装置などに関する。
【背景技術】
【0002】
自動車の変速制御機構には、大きく分けてマニュアルトランスミッション(MT)とオートマチックトランスミッション(AT)という2通りの方式があるが、社団法人日本自動車販売協会連合会による統計では、西暦2009年に日本国内で販売された乗用車のうちの約98%がATを搭載した車(以後AT車という)である。この割合は年を追うごとに増加している。
【0003】
AT車は、運転者がブレーキペダルとアクセルペダルとを踏み間違え、ブレーキペダルを踏んだつもりでアクセルペダルを踏み込むと、その変速制御特性上、急発進や急加速が生じやすい。また、運転者がシフトレバーで前進を選択したつもりで後退を選択、あるいは後退を選択したつもりで前進を選択したというようなシフトレバーの選択間違いでも、同じように急発進や急加速が生じやすい。
【0004】
これらのような誤操作によって発生したと考えられる交通事故は、財団法人交通事故総合分析センターによる日本国内の西暦2009年の統計(非特許文献1)では年間43,897件、その中でもブレーキペダルとアクセルペダルとの踏み間違いによるものだけで年間6,577件発生している。また、誤操作による車両の暴走は、発生場所によっては(たとえば立体駐車場、コンビニエンスストアなど)第三者を巻き込んだ惨事になる可能性がある。このため、AT車の誤操作による急発進および急加速の発生を防止する機構が求められている。
【0005】
これに関連する技術として、次の各々がある。その中でも特許文献1には、アクセル開度に応じて車両に減速度を付与する減速度制御装置で、減速度の設定値と実測値とを比較して異常を検知するという技術が記載されている。特許文献2には、自車と自車の前の障害物との距離を検知し、運転者がアクセルを急激に開いた時に該障害物との衝突を回避するという衝突防止制御装置が記載されている。
【0006】
特許文献3には、電気自動車の車両が後退時に必要以上に加速されないように速度を制限するという技術が記載されている。特許文献4には、車両の後退時にスロットル開度を制限するという速度制御方法が記載されている。特許文献5には、カーナビゲーションで特定の運転者の操作情報を記憶し、これによって速度制御を含む各種制御を実現するという車両制御装置が記載されている。特許文献6には、自車の前の障害物との距離と、運転者が示す誤発進前兆挙動を検出して誤発進を防止するという自動車制御システムが記載されている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2001−310716号公報
【特許文献2】特開2004−280489号公報
【特許文献3】実開平05−095109号公報
【特許文献4】特開2004−106677号公報
【特許文献5】特開2008−168865号公報
【特許文献6】特開2010−023769号公報
【非特許文献】
【0008】
【非特許文献1】イタルダ・インフォメーション86号「運転操作の誤りを防ぐ」、平成22年12月、財団法人交通事故総合分析センター(ITARDA)、[平成23年6月8日検索]、インターネット<URL:http://www.itarda.or.jp/itardainfomation/info86.pdf>
【発明の概要】
【発明が解決しようとする課題】
【0009】
急発進および急加速の発生を防止するために、AT車には、アクセルペダルの開度を検知し、運転者が急激にアクセルペダルを踏み込んだ場合にエンジンを停止する機構を備えたものが多くなっている。しかしながら、このような機構では、シフトレバーの前進と後退を間違えた場合の誤操作を防止できない。特許文献1,3,4,5に記載の技術でも、これと同様である。
【0010】
また、特許文献2,6などのように、自車と障害物との間の距離を検知するセンサや、運転者の挙動をカメラを介して検知する画像検知技術などを利用して、運転者の誤操作を検出する技術はあるが、これらのような技術には高価なセンサや、高度な検知処理が可能な大規模のプロセッサが必要となり、これらの装置を駆動するためにバッテリなどの電力系統の強化も必要となる。従って、このような技術は自動車の高価格化を招くものであり、全ての自動車に対して搭載できるものではない。
【0011】
本発明の目的は、大規模なプロセッサを搭載できない車両でも、AT車のシフトレバーの前進と後退の間違いを含んだ誤操作による急発進および急加速の発生を有効に防止しうる自動車用変速制御装置、変速制御方法、および変速制御プログラムを提供することにある。
【課題を解決するための手段】
【0012】
上記目的を達成するため、本発明に係る変速制御装置は、走行速度を検出する車速センサと、運転者がシフトレバーで前進か後退のいずれの進行方向を選択しているかを検出する進行方向ギアセンサと、運転者のアクセルペダルを踏み込んでいる量をアクセル開度として検出するアクセル開度センサと、アクセル開度に応じて備えられたエンジンの回転数を制御するスロットルコントローラとを予め備えるオートマチックトランスミッション方式の自動車用変速制御装置であって、進行方向ごとにアクセル開度に応じて通常得られる走行速度である予測速度および閾値の上下限値についての情報である通常操作情報を予め記憶している操作情報記憶手段と、選択された進行方向の通常操作情報に基づいてアクセル開度から通常操作情報を参照して予測速度および閾値を算出する車両速度予測部と、実際の走行速度と予測速度の差が閾値の上下限値の範囲から外れている場合に警報を発する誤操作判断部とを備えることを特徴とする。
【0013】
上記目的を達成するため、本発明に係る変速制御方法は、走行速度を検出する車速センサと、運転者がシフトレバーで前進か後退のいずれの進行方向を選択しているかを検出する進行方向ギアセンサと、運転者のアクセルペダルを踏み込んでいる量をアクセル開度として検出するアクセル開度センサと、アクセル開度に応じて備えられたエンジンの回転数を制御するスロットルコントローラとを予め備えるオートマチックトランスミッション方式の自動車用変速制御装置にあって、進行方向ごとにアクセル開度に応じて通常得られる走行速度である予測速度および閾値の上下限値についての情報である通常操作情報を操作情報記憶手段に予め記憶し、選択された進行方向の通常操作情報に基づいて車両速度予測部がアクセル開度から通常操作情報を参照して予測速度および閾値を算出し、実際の走行速度と予測速度の差が閾値の上下限値の範囲から外れているか否かを誤操作判断部が判定すると共に当該走行速度がこの範囲から外れていた場合に警報を発することを特徴とする。
【0014】
上記目的を達成するため、本発明に係る変速制御プログラムは、走行速度を検出する車速センサと、運転者がシフトレバーで前進か後退のいずれの進行方向を選択しているかを検出する進行方向ギアセンサと、運転者のアクセルペダルを踏み込んでいる量をアクセル開度として検出するアクセル開度センサと、アクセル開度に応じて備えられたエンジンの回転数を制御するスロットルコントローラとを予め備えるオートマチックトランスミッション方式の自動車用変速制御装置にあって、変速制御装置が備えているコンピュータに、進行方向ごとに操作情報記憶手段に予め記憶されたアクセル開度に応じて通常得られる走行速度である予測速度および閾値の上下限値についての情報である通常操作情報を参照してアクセル開度から予測速度および閾値を算出する手順、および実際の走行速度と予測速度の差が閾値の上下限値の範囲から外れているか否かを判定すると共に当該走行速度がこの範囲から外れていた場合に警報を発する手順を実行させることを特徴とする。
【発明の効果】
【0015】
本発明は、上記したように、前進または後退ごとの通常操作情報に基づいてアクセル開度から予測速度および閾値を算出し、これと実際の走行速度とを比較して異常である否かを判定するように構成したので、シフトレバーの前進と後退を間違えた場合にもその誤操作を検出でき、かつ特別なセンサや演算処理を必要とせずに誤操作を検出できる。これによって、大規模なプロセッサを搭載できない車両でも、AT車のシフトレバーの前進と後退の間違いを含んだ誤操作による急発進および急加速の発生を有効に防止できるという優れた特徴を持つ自動車用変速制御装置、変速制御方法、および変速制御プログラムを提供することができる。
【図面の簡単な説明】
【0016】
【図1】図2で示した変速制御装置のより詳しい構成について示す説明図である。
【図2】本発明の第1の実施形態に係る変速制御装置を搭載した自動車の構成を示す説明図である。
【図3】図1で示した車両速度予測部および誤操作判断部の動作を示すフローチャートである。
【図4】図1に示した通常操作情報として記憶されている、アクセル開度Accpと車両速度Vspの関係について示すグラフである。図4(a)は前進時、図4(b)は後退時の場合についてそれぞれ示す。
【図5】本発明の第2の実施形態に係る変速制御装置を搭載した自動車の構成を示す説明図である。
【図6】図5で示した変速制御装置のより詳しい構成について示す説明図である。
【発明を実施するための形態】
【0017】
(第1の実施形態)
以下、本発明の実施形態の構成について添付図1〜2に基づいて説明する。
最初に、本実施形態の基本的な内容について説明し、その後でより具体的な内容について説明する。
本実施形態に係る自動車用変速制御装置(変速制御装置10)は、走行速度を検出する車速センサ111と、運転者がシフトレバーで前進か後退かのいずれを選択しているかを検出する進行方向ギアセンサ112と、運転者のアクセルペダルを踏み込んでいる量をアクセル開度として検出するアクセル開度センサ113と、アクセル開度に応じて備えられたエンジンの回転数を制御するスロットルコントローラ121とを予め備えるオートマチックトランスミッション方式の自動車100の変速制御装置である。この変速制御装置10は、前進または後退ごとにアクセル開度に応じて通常得られる走行速度である予測速度および閾値についての情報である通常操作情報23を予め記憶している操作情報記憶手段(記憶手段12)と、選択された前進または後退ごとの通常操作情報に基づいてアクセル開度から通常操作情報を参照して予測速度および閾値を算出する車両速度予測部21と、実際の走行速度と予測速度の差が閾値の上下限値の範囲から外れている場合に警報を発する誤操作判断部22とを備える。
【0018】
また、運転者がブレーキペダルを踏んでいるか否かを検出するフットブレーキセンサ114を自動車100が予め備えると共に、誤操作判断部22が、警報を発しても運転者がブレーキペダルを踏まない場合に、エンジンの回転数を減少させるようスロットルコントローラ121を制御する機能を備える。さらに、誤操作判断部22は、実際の走行速度と予測速度の差が閾値の上下限値の範囲から外れていない場合に、通常操作情報23に実際の走行速度を含めて記憶させる機能を備える。
【0019】
以上の構成を備えることにより、本実施形態の変速制御装置10は、大規模なプロセッサを搭載できない車両でも、AT車の誤操作による急発進および急加速の発生を有効に防止できるものとなる。
以下、これをより詳細に説明する。
【0020】
図2は、本発明の第1の実施形態に係る変速制御装置10を搭載した自動車100の構成を示す説明図である。図2は、自動車100の運転席周辺の内装部分について主に示している。
【0021】
自動車100は、一般的な自動車と同様に、ステアリング101、アクセルペダル102、ブレーキペダル103、シフトレバー104などのような操縦機構を搭載しているが、それと共に、車速センサ111、進行方向ギアセンサ112、アクセル開度センサ113、フットブレーキセンサ114といった、自動車100の現在の運転状況を検知するセンサが車体の各所に搭載されている。
【0022】
また、自動車100のフロントウィンドウ下〜運転席正面に配置されたダッシュボード123には、自動車100の現在の状況を示す計器類(スピードメーター、タコメーター、燃料計など)が多数配置されているが、この中には変速制御装置10から出力される情報を運転者に対して提示する表示装置122も含まれる。
【0023】
車速センサ111は、タイヤの回転などから現在の自動車100が走っている速度を検知して、これを電圧信号として出力する。進行方向ギアセンサ112は、運転者がシフトレバー104で前進か後退のいずれを選択しているかを電圧信号として出力する。アクセル開度センサ113は、運転者がアクセルペダル102を踏み込んでいる量(開度)を検知して、これを電圧信号として出力する。フットブレーキセンサ114は、運転者がブレーキペダル103を踏んでいるか否かを電圧信号として出力する。これらのセンサから出力されるアナログの物理量が、変速制御装置10に入力される。
【0024】
図1は、図2で示した変速制御装置10のより詳しい構成について示す説明図である。変速制御装置10は、自動車100に搭載される車載コンピュータであり、コンピュータプログラムを実行する主体である主演算制御手段(CPU,Central Processing Unit)11と、各種データを予め記憶している記憶手段12と、前述の自動車100に搭載されている各センサで検出された運転状況を示すアナログの物理量を主演算制御手段11で処理可能なデジタルの数値に変換する入力手段13と、主演算制御手段11から出力されたデジタルの数値をアナログの物理量に変換して出力する出力手段14とを備える。
【0025】
入力手段13は、車速センサ111およびアクセル開度センサ113から出力される電圧信号を、各々時速(km/h)および百分率(パーセンテージ)を単位とするアクセル開度に変換する。また入力手段13は、進行方向ギアセンサ112から出力される電圧信号を、シフトレバー104が前進と後退のいずれが選択されているかを示す2値信号に変換する。フットブレーキセンサ114から出力される電圧信号についても同様に、運転者がブレーキを踏んでいるか否かを示す2値信号に変換する。
【0026】
出力手段14からは、自動車100の動力源であるエンジン120に対して供給される燃料を含む混合気の流量を調整してエンジン120の回転数を制御するスロットルコントローラ121と、前述の表示装置122に対して情報が出力される。表示装置122には、ランプによって運転者に警告を発する警告灯122aと、警告音を発する警告ブザー122bが含まれている。
【0027】
主演算制御手段11は、変速制御プログラムが動作することにより、入力された運転操作の情報から運転者が意図している車両速度を予測する車両速度予測部21、およびその操作が運転者の意図したものであるか否かを判断する誤操作判断部22として動作する。また、記憶手段12では、運転者の通常の運転操作についての情報である通常操作情報23が記憶され、さらに一時的な情報を記憶する一時記憶域24も確保されている。これらの詳細については後述する。また、通常操作情報23および一時記憶域24の具体的なデータ形式は、任意のものでよい。
【0028】
図3は、図1で示した車両速度予測部21および誤操作判断部22の動作を示すフローチャートである。運転者が自動車100の運転を開始すると、車両速度予測部21がまず、進行方向ギアセンサ112の出力信号から、運転者が選択した進行方向が前進であるか後退であるかを検出し(ステップS201)、引き続いてアクセル開度センサ113の出力信号から、運転者が行っているアクセルペダル102の踏み込みをアクセル開度Accpとして検出する(ステップS202)。
【0029】
これに引き続いて車両速度予測部21はさらに、車速センサ111の出力信号から、運転者のアクセルペダル102の操作結果として得られている現在の車両速度Vsp(*)を検出する(ステップS203)。以上のステップS201〜203で検出されたアクセル開度Accp、車両速度Vsp、および進行方向(前進または後退)を、車両速度予測部21は記憶手段12の一時記憶域24に記憶させる(ステップS204)。
【0030】
そして車両速度予測部21は、アクセル開度Accpおよび進行方向から、車両速度予測の処理を行う(ステップS205)。図4は、図1に示した通常操作情報23として進行方向ごとに記憶されている、アクセル開度Accpと車両速度Vspの関係について示すグラフである。図4(a)は前進時、図4(b)は後退時の場合についてそれぞれ示す。
【0031】
図4に示した通常操作情報23は、アクセル開度Accpと、これに対応して実測された車両速度Vspの平均との間の関係を示すものである。アクセル開度Accpについては、アクセルの踏み込み量、およびアクセルを踏み込むために必要な力は車両ごとに異なるものであるので、その車両の踏み込み可能なストロークに対するアクセル開度のパーセンテージである。車両速度Vspは実測値である。
【0032】
また、通常操作情報23は個々の運転者の習慣などに依存するものであるので、運転者ごとに異なる通常操作情報23を記憶できるよう、運転者ごとの記憶域を記憶手段12に確保することがより望ましい。この場合、実際の運転者を識別するために、たとえばキーレスエントリーシステム用の発信器が運転者識別用の信号を発信するようにしてもよいし、また表示装置122を含むダッシュボード123に運転者切替用のスイッチを付けてもよい。
【0033】
図4(a)に示した前進時の場合について説明すると、車両速度予測部21はステップS202で得られたアクセル開度Accpを図4(a)の曲線に適用して、運転者の意図する車両速度である予測速度Vfspを得る。
【0034】
ただし、実際の車両速度はアクセル開度に応じて常に一定となるものではなく、路面状況(降雨や舗装の有無など)、重量(乗車人数や荷物の積載量など)、地形(勾配など)やその他の要素によって変動しうるものであるので、その変動分に伴う閾値θfspも図4(a)の曲線には同時に設定されている。この閾値θfspの上限値と下限値との間の幅は、予測速度が低い場合には大きく、予測速度が高くなるにつれて小さくなるように設定されている。
【0035】
図4(a)で、アクセル開度がAccp=40%である場合には、予測速度Vfspとして時速約22km、閾値θfspを含む予測速度Vfspの許容変動範囲として時速約17〜30kmという予測結果が得られる。また、アクセル開度がAcc1p=10%である場合には、許容変動範囲を含む予測速度Vfspは時速約10km以下という予測結果が得られる。
【0036】
図4(b)に示した後退時の場合も、前進時と同様ではあるが、図4(a)と同一のアクセル開度AccpおよびAcc1pで得られる予測速度は、前進時と比べて高くなる。図4(b)に示した曲線によると、アクセル開度がAccp=40%である場合には、予測速度Vbspが時速約40km、閾値θbspを含む許容変動範囲が時速約36〜43kmという予測結果になる。また、アクセル開度がAcc1p=10%である場合には、予測速度Vbspが時速約20km、許容変動範囲が時速約15〜25kmという予測結果になる。
【0037】
車両速度予測部21は、以上の処理結果、即ちアクセル開度Accp、車両速度Vsp(*)、進行方向、および予測速度Vfsp(後退時はVbsp)とその閾値θfsp(後退時はθbsp)とを、誤操作判断部22に渡す。
【0038】
図3に戻って、ステップS205までの処理結果を車両速度予測部21から受け取った誤操作判断部22は、運転者の操作が誤操作であるか否かを判断する(ステップS206〜207)。
【0039】
進行方向ギアセンサ112から出力された運転者の選択したシフトレバー104の状態が前進である場合には、車両速度Vsp(*)が予測速度Vfsp+閾値θfspの範囲の上限値を上回っていれば、誤操作判断部22はこれを誤操作と判断する。また、シフトレバー104の状態が後退である場合には、車両速度Vsp(*)が予測速度Vbsp+閾値θbspの範囲の上限値を上回っていれば、誤操作判断部22はこれを誤操作と判断する。ここで「車両速度Vsp(*)」の「(*)」は、実測された速度を示す記号である。
【0040】
これをより具体的に説明する。シフトレバー104の状態が前進であり、かつアクセル開度Accp=40%である場合、図4(a)の曲線から、運転者の通常の操作では予測速度Vfsp=約22kmを運転者は意図しているものと判断できる。閾値θfspを含む予測速度Vfspの許容変動範囲は、時速約17〜30kmである。
【0041】
しかしながら、これに対して実際にステップS203で検出された車両速度Vsp(*)が、この範囲の上限値=時速約30kmを上回っている場合、またはこの範囲の下限値=時速約17kmを下回っている場合、運転者のアクセル操作が過大もしくは過小であるため、ブレーキペダル103を踏むつもりでアクセルペダル102を踏み込んでしまったなどのような誤操作であると判断可能である。
【0042】
また、運転者が前進を意図しているにもかかわらずシフトレバー104の状態を誤って後退とした場合、後退時の変速比は前進時と比べて高く、かつ後退時には自動変速が発生しないことより、車両の静止状態からの発進の時の同一のアクセル開度Accpに対する後退時の車両速度は、前進時と比べて高い。即ち、Vbsp>Vfspとなる。
【0043】
たとえば、図4(a)および(b)に示した曲線で、同一のAccp1=10%に対して、Vfsp=時速約10km以下、Vbsp=時速約20km(許容変動範囲が時速約15〜25km)となる。
【0044】
このため、シフトレバー104の状態が前進でありかつVsp(*)>時速10km以上である状態、あるいはシフトレバー104の状態が後退でありVsp(*)が時速15km以下もしくは25km以上ある状態も、運転者の意図した車両速度でない可能性が高いので、誤操作であると判断可能である。
【0045】
誤操作判断部22は、上記の基準によって運転者の操作が誤操作であると判断した場合には後述のステップS208に進む。誤操作ではないと判断した場合には、後述のステップS212に進む。
【0046】
誤操作を検出した誤操作判断部22は、出力手段14を介して表示装置122の警告灯122aを点灯させ(ステップS208)、また警告ブザー122bを鳴動させる(ステップS209)。そして、運転者がこれに反応して誤操作を確認し、アクセルペダル102の開度を減少させてブレーキペダル103を踏んだか否かを、アクセル開度センサ113およびフットブレーキセンサ114を介して検出する(ステップS210)。
【0047】
運転者がアクセルペダル102の開度を減少させ、かつブレーキペダル103を踏む操作をしていれば、運転者は減速を意図した運転操作を行ったと判断できるので、平常の運転操作時と同様に、アクセル開度Accpに応じて減少したスロットル開度をスロットルコントローラ121に対して出力して、後述のステップS212に進む。
【0048】
ステップS210で、アクセルペダル102の開度を減少させ、かつブレーキペダル103を踏むという操作が確認できなかった場合、誤操作判断部22は強制的に減少したスロットル開度をスロットルコントローラ121に対して出力して、車両速度を強制的に減速させて処理を終了する(ステップS211)。
【0049】
前述したステップS207で、運転者の操作が誤操作でないと判断された場合、もしくはステップS210でブレーキペダル103を踏んだと判断された場合、誤操作判断部22は、通常操作情報23として記憶された情報の、アクセル開度Accpに対して実際に観測された車両速度Vsp(*)の、過去の運転履歴に含めた平均値を予測速度VfspもしくはVbspの値とする(ステップS212)。この場合、閾値θfspの上限値と下限値との間の幅は変更されない。
【0050】
(実施形態の全体的な動作)
次に、上記の実施形態の全体的な動作について説明する。
本実施形態に係る変速制御方法は、走行速度を検出する車速センサと、運転者がシフトレバーで前進か後退かのいずれを選択しているかを検出する進行方向ギアセンサと、運転者のアクセルペダルを踏み込んでいる量をアクセル開度として検出するアクセル開度センサと、アクセル開度に応じて備えられたエンジンの回転数を制御するスロットルコントローラとを予め備えるオートマチックトランスミッション方式の自動車100の変速制御装置10にあって、前進または後退ごとにアクセル開度に応じて通常得られる走行速度である予測速度および閾値の上下限値についての情報である通常操作情報を操作情報記憶手段に予め記憶し、選択された前進または後退ごとの通常操作情報に基づいて車両速度予測部がアクセル開度から通常操作情報を参照して予測速度および閾値を算出し(図3・ステップS205)、実際の走行速度と予測速度の差が閾値の上下限値の範囲から外れているか否かを誤操作判断部が判定する(図3・ステップS206〜207)と共に当該走行速度がこの範囲から外れていた場合に警報を発する(図3・ステップS208〜209)。
【0051】
ここで、上記各動作ステップについては、これをコンピュータで実行可能にプログラム化し、これらを前記各ステップを直接実行する変速制御装置10に実行させるようにしてもよい。本プログラムは、非一時的な記録媒体、例えば、DVD、CD、フラッシュメモリ等に記録されてもよい。その場合、本プログラムは、記録媒体からコンピュータによって読み出され、実行される。
この動作により、本実施形態は以下のような効果を奏する。
【0052】
本発明に係る動作は、距離センサなどのような特殊なハードウェアを必要とせず、また画像処理などのような高度な演算処理を必要としない。ただ、単純なデジタル→アナログ変換およびアナログ→デジタル変換のみで実現可能であるので、ハードウェアは安価で済む。またプロセッサにも高度な演算処理が要求されないので、これも安価で済む。
【0053】
それでいて、予測速度と実際の走行速度を比較することにより、運転者の誤操作を的確に検出可能である。特に、シフトレバーの選択間違いや、ブレーキペダルとアクセルペダルとの踏み間違いなどのような、重大な事故につながりやすい誤操作を的確に検出して警報を発し、そのような事故を有効に予防することができる。
【0054】
また、通常操作情報はそれぞれの運転者の普段の運転操作に基づくものであるので、全ての運転者に対して同一の検出基準を適用する場合よりも、誤操作を的確に検出可能である。たとえば、ある運転者にとっては急加速となる運転操作であっても、別の運転者にとっては通常の運転操作の範囲内である場合もありうるが、本実施形態では、そのような場合でも、誤操作であるか否かを的確に検出できる。
【0055】
(第2の実施形態)
本発明の第2の実施形態に係る変速制御装置310は、第1の実施形態の構成に加えて、通常操作情報を、同系車種の他の自動車においても利用可能なデータとして出力する通常操作情報入出力部325を備える構成とした。
【0056】
この構成を取ることにより、本実施形態では、運転者が通常運転する自動車とは異なる同系車種の自動車においても、運転者の操作の癖から誤操作を有効に検出できるという第1の実施形態と同じ効果を得ることができる。
以下、これをより詳しく解説する。
【0057】
図5は、本発明の第2の実施形態に係る変速制御装置310を搭載した自動車300の構成を示す説明図である。自動車300は、前述の第1の実施形態に係る自動車100と同一の構成を備えており、ただ変速制御装置10のみが別の変速制御装置310に置換されている。従って、これ以外の要素については全て第1の実施形態と同一の名称および参照番号でいう。
【0058】
図6は、図5で示した変速制御装置310のより詳しい構成について示す説明図である。変速制御装置310の構成も、図1で示した第1の実施形態に係る変速制御装置10とほぼ同一であり、ただハードウェアとして通信手段315が追加され、そして主演算制御手段11で動作するソフトウェアとしては通常操作情報入出力部325が追加されているのみである。従って、これ以外の要素については全て第1の実施形態と同一の名称および参照番号でいう。
【0059】
通常操作情報入出力部325は、記憶手段12に記憶された通常操作情報23を他の自動車によって読み込み可能なデータ形式に書き出してこれを通信手段315を介して出力する、あるいは他の自動車から書き出された通常操作情報を通信手段315を介して自車(自動車300)で使用可能なように取り込んで通常操作情報23として記憶手段12に記憶させる機能を有する。ここで、通常操作情報23の具体的なデータ形式は任意のものでよい。
【0060】
また、自車(自動車300)と他の自動車との間で通信手段315を利用して通常操作情報23のデータを交換する方法も、現在知られている任意の方法を利用することができる。たとえば、携帯電話を利用して無線通信網やインターネット等を介して当該データを転送してもよいし、その際にサーバコンピュータに一時的に当該データを記憶させてもよい。また、USBフラッシュメモリ等のような記憶媒体を接続して、これによって当該データを複写してもよい。
【0061】
これによって、運転者が普段運転する車両とは異なる同系車種の車両に乗ることがあっても、その車両に普段からの通常操作情報23を反映させて動作させることができる。前述したように、通常操作情報23はパーセント単位でのアクセル開度Accpに車両速度Vsp(*)を関連づけたものであるので、たとえばレバーの堅さなどのような車両個々の機械的特性による影響が比較的少なく、従って同系車種であれば異なる車両に対しても容易に適用可能なものである。
【0062】
これまで本発明について図面に示した特定の実施形態をもって説明してきたが、本発明は図面に示した実施形態に限定されるものではなく、本発明の効果を奏する限り、これまで知られたいかなる構成であっても採用することができる。
【0063】
上述した実施形態について、その新規な技術内容の要点をまとめると、以下のようになる。なお、上記実施形態の一部または全部は、新規な技術として以下のようにまとめられるが、本発明は必ずしもこれに限定されるものではない。
【0064】
(付記1) 走行速度を検出する車速センサと、運転者がシフトレバーで前進か後退のいずれの進行方向を選択しているかを検出する進行方向ギアセンサと、運転者のアクセルペダルを踏み込んでいる量をアクセル開度として検出するアクセル開度センサと、前記アクセル開度に応じて備えられたエンジンの回転数を制御するスロットルコントローラとを予め備えるオートマチックトランスミッション方式の自動車用変速制御装置であって、
前記進行方向ごとに前記アクセル開度に応じて通常得られる走行速度である予測速度および閾値の上下限値についての情報である通常操作情報を予め記憶している操作情報記憶手段と、
選択された前記進行方向の前記通常操作情報に基づいて前記アクセル開度から前記通常操作情報を参照して前記予測速度および前記閾値を算出する車両速度予測部と、
実際の前記走行速度と前記予測速度の差が前記閾値の上下限値の範囲から外れている場合に警報を発する誤操作判断部と
を備えることを特徴とする自動車用変速制御装置。
【0065】
(付記2) 前記運転者がブレーキペダルを踏んでいるか否かを検出するフットブレーキセンサを前記自動車が予め備えると共に、
前記誤操作判断部が、前記警報を発しても前記運転者が前記ブレーキペダルを踏まない場合に、前記エンジンの回転数を減少させるよう前記スロットルコントローラを制御する機能を備えることを特徴とする、付記1に記載の変速制御装置。
【0066】
(付記3) 前記誤操作判断部が、実際の前記走行速度と前記予測速度の差が前記閾値の上下限値の範囲から外れていない場合に、前記通常操作情報に実際の前記走行速度を含めて記憶させる機能を備えることを特徴とする、付記1に記載の変速制御装置。
【0067】
(付記4)前記通常操作情報を、同系車種の他の自動車においても利用可能なデータとして出力する通常操作情報入出力部を備えることを特徴とする、付記1に記載の変速制御装置。
【0068】
(付記5) 走行速度を検出する車速センサと、運転者がシフトレバーで前進か後退のいずれの進行方向を選択しているかを検出する進行方向ギアセンサと、運転者のアクセルペダルを踏み込んでいる量をアクセル開度として検出するアクセル開度センサと、前記アクセル開度に応じて備えられたエンジンの回転数を制御するスロットルコントローラとを予め備えるオートマチックトランスミッション方式の自動車用変速制御装置にあって、
前記進行方向ごとに前記アクセル開度に応じて通常得られる走行速度である予測速度および閾値の上下限値についての情報である通常操作情報を操作情報記憶手段に予め記憶し、
選択された前記進行方向の前記通常操作情報に基づいて車両速度予測部が前記アクセル開度から前記通常操作情報を参照して前記予測速度および前記閾値を算出し、
実際の前記走行速度と前記予測速度の差が前記閾値の上下限値の範囲から外れているか否かを誤操作判断部が判定すると共に当該走行速度がこの範囲から外れていた場合に警報を発する
ことを特徴とする自動車用変速制御方法。
【0069】
(付記6) 走行速度を検出する車速センサと、運転者がシフトレバーで前進か後退のいずれの進行方向を選択しているかを検出する進行方向ギアセンサと、運転者のアクセルペダルを踏み込んでいる量をアクセル開度として検出するアクセル開度センサと、前記アクセル開度に応じて備えられたエンジンの回転数を制御するスロットルコントローラとを予め備えるオートマチックトランスミッション方式の自動車用変速制御装置にあって、
前記変速制御装置が備えているコンピュータに、
前記進行方向ごとに操作情報記憶手段に予め記憶された前記アクセル開度に応じて通常得られる走行速度である予測速度および閾値の上下限値についての情報である通常操作情報を参照して前記アクセル開度から前記予測速度および前記閾値を算出する手順、
および実際の前記走行速度と前記予測速度の差が前記閾値の上下限値の範囲から外れているか否かを判定すると共に当該走行速度がこの範囲から外れていた場合に警報を発する手順
を実行させることを特徴とする自動車用変速制御プログラム。
【産業上の利用可能性】
【0070】
本発明は、オートマチックトランスミッション方式の自動車において一般的に適用可能である。
【符号の説明】
【0071】
10、310 変速制御装置
11 主演算制御手段
12 記憶手段
13 入力手段
14 出力手段
21 車両速度予測部
22 誤操作判断部
23 通常操作情報
24 一時記憶域
100、300 自動車
101 ステアリング
102 アクセルペダル
103 ブレーキペダル
104 シフトレバー
111 車速センサ
112 進行方向ギアセンサ
113 アクセル開度センサ
114 フットブレーキセンサ
120 エンジン
121 スロットルコントローラ
122 表示装置
122a 警告灯
122b 警告ブザー
123 ダッシュボード
315 通信手段
325 通常操作情報入出力部
【特許請求の範囲】
【請求項1】
走行速度を検出する車速センサと、運転者がシフトレバーで前進か後退かのいずれを選択しているかを検出する進行方向ギアセンサと、運転者のアクセルペダルを踏み込んでいる量をアクセル開度として検出するアクセル開度センサと、前記アクセル開度に応じて備えられたエンジンの回転数を制御するスロットルコントローラとを予め備えるオートマチックトランスミッション方式の自動車用変速制御装置であって、
前進または後退ごとに前記アクセル開度に応じて通常得られる走行速度である予測速度および閾値の上下限値についての情報である通常操作情報を予め記憶している操作情報記憶手段と、
選択された前進または後退ごとの前記通常操作情報に基づいて前記アクセル開度から前記通常操作情報を参照して前記予測速度および前記閾値を算出する車両速度予測部と、
実際の前記走行速度と前記予測速度の差が前記閾値の上下限値の範囲から外れている場合に警報を発する誤操作判断部と
を備えることを特徴とする自動車用変速制御装置。
【請求項2】
前記運転者がブレーキペダルを踏んでいるか否かを検出するフットブレーキセンサを前記自動車が予め備えると共に、
前記誤操作判断部が、前記警報を発しても前記運転者が前記ブレーキペダルを踏まない場合に、前記エンジンの回転数を減少させるよう前記スロットルコントローラを制御する機能を備えることを特徴とする、請求項1に記載の自動車用変速制御装置。
【請求項3】
前記誤操作判断部が、実際の前記走行速度と前記予測速度の差が前記閾値の上下限値の範囲から外れていない場合に、前記通常操作情報に実際の前記走行速度を含めて記憶させる機能を備えることを特徴とする、請求項1に記載の自動車用変速制御装置。
【請求項4】
前記通常操作情報を、同系車種の他の自動車においても利用可能なデータとして出力する通常操作情報入出力部を備えることを特徴とする、請求項1に記載の自動車用変速制御装置。
【請求項5】
走行速度を検出する車速センサと、運転者がシフトレバーで前進か後退かのいずれを選択しているかを検出する進行方向ギアセンサと、運転者のアクセルペダルを踏み込んでいる量をアクセル開度として検出するアクセル開度センサと、前記アクセル開度に応じて備えられたエンジンの回転数を制御するスロットルコントローラとを予め備えるオートマチックトランスミッション方式の自動車用変速制御装置にあって、
前進または後退ごとに前記アクセル開度に応じて通常得られる走行速度である予測速度および閾値の上下限値についての情報である通常操作情報を操作情報記憶手段に予め記憶し、
選択された前進または後退ごとの前記通常操作情報に基づいて車両速度予測部が前記アクセル開度から前記通常操作情報を参照して前記予測速度および前記閾値を算出し、
実際の前記走行速度と前記予測速度の差が前記閾値の上下限値の範囲から外れているか否かを誤操作判断部が判定すると共に当該走行速度がこの範囲から外れていた場合に警報を発する
ことを特徴とする自動車用変速制御方法。
【請求項6】
走行速度を検出する車速センサと、運転者がシフトレバーで前進か後退かのいずれを選択しているかを検出する進行方向ギアセンサと、運転者のアクセルペダルを踏み込んでいる量をアクセル開度として検出するアクセル開度センサと、前記アクセル開度に応じて備えられたエンジンの回転数を制御するスロットルコントローラとを予め備えるオートマチックトランスミッション方式の自動車用変速制御装置にあって、
前記変速制御装置が備えているコンピュータに、
前進または後退ごとに操作情報記憶手段に予め記憶された前記アクセル開度に応じて通常得られる走行速度である予測速度および閾値の上下限値についての情報である通常操作情報を参照して前記アクセル開度から前記予測速度および前記閾値を算出する手順、
および実際の前記走行速度と前記予測速度の差が前記閾値の上下限値の範囲から外れているか否かを判定すると共に当該走行速度がこの範囲から外れていた場合に警報を発する手順
を実行させることを特徴とする自動車用変速制御プログラム。
【請求項1】
走行速度を検出する車速センサと、運転者がシフトレバーで前進か後退かのいずれを選択しているかを検出する進行方向ギアセンサと、運転者のアクセルペダルを踏み込んでいる量をアクセル開度として検出するアクセル開度センサと、前記アクセル開度に応じて備えられたエンジンの回転数を制御するスロットルコントローラとを予め備えるオートマチックトランスミッション方式の自動車用変速制御装置であって、
前進または後退ごとに前記アクセル開度に応じて通常得られる走行速度である予測速度および閾値の上下限値についての情報である通常操作情報を予め記憶している操作情報記憶手段と、
選択された前進または後退ごとの前記通常操作情報に基づいて前記アクセル開度から前記通常操作情報を参照して前記予測速度および前記閾値を算出する車両速度予測部と、
実際の前記走行速度と前記予測速度の差が前記閾値の上下限値の範囲から外れている場合に警報を発する誤操作判断部と
を備えることを特徴とする自動車用変速制御装置。
【請求項2】
前記運転者がブレーキペダルを踏んでいるか否かを検出するフットブレーキセンサを前記自動車が予め備えると共に、
前記誤操作判断部が、前記警報を発しても前記運転者が前記ブレーキペダルを踏まない場合に、前記エンジンの回転数を減少させるよう前記スロットルコントローラを制御する機能を備えることを特徴とする、請求項1に記載の自動車用変速制御装置。
【請求項3】
前記誤操作判断部が、実際の前記走行速度と前記予測速度の差が前記閾値の上下限値の範囲から外れていない場合に、前記通常操作情報に実際の前記走行速度を含めて記憶させる機能を備えることを特徴とする、請求項1に記載の自動車用変速制御装置。
【請求項4】
前記通常操作情報を、同系車種の他の自動車においても利用可能なデータとして出力する通常操作情報入出力部を備えることを特徴とする、請求項1に記載の自動車用変速制御装置。
【請求項5】
走行速度を検出する車速センサと、運転者がシフトレバーで前進か後退かのいずれを選択しているかを検出する進行方向ギアセンサと、運転者のアクセルペダルを踏み込んでいる量をアクセル開度として検出するアクセル開度センサと、前記アクセル開度に応じて備えられたエンジンの回転数を制御するスロットルコントローラとを予め備えるオートマチックトランスミッション方式の自動車用変速制御装置にあって、
前進または後退ごとに前記アクセル開度に応じて通常得られる走行速度である予測速度および閾値の上下限値についての情報である通常操作情報を操作情報記憶手段に予め記憶し、
選択された前進または後退ごとの前記通常操作情報に基づいて車両速度予測部が前記アクセル開度から前記通常操作情報を参照して前記予測速度および前記閾値を算出し、
実際の前記走行速度と前記予測速度の差が前記閾値の上下限値の範囲から外れているか否かを誤操作判断部が判定すると共に当該走行速度がこの範囲から外れていた場合に警報を発する
ことを特徴とする自動車用変速制御方法。
【請求項6】
走行速度を検出する車速センサと、運転者がシフトレバーで前進か後退かのいずれを選択しているかを検出する進行方向ギアセンサと、運転者のアクセルペダルを踏み込んでいる量をアクセル開度として検出するアクセル開度センサと、前記アクセル開度に応じて備えられたエンジンの回転数を制御するスロットルコントローラとを予め備えるオートマチックトランスミッション方式の自動車用変速制御装置にあって、
前記変速制御装置が備えているコンピュータに、
前進または後退ごとに操作情報記憶手段に予め記憶された前記アクセル開度に応じて通常得られる走行速度である予測速度および閾値の上下限値についての情報である通常操作情報を参照して前記アクセル開度から前記予測速度および前記閾値を算出する手順、
および実際の前記走行速度と前記予測速度の差が前記閾値の上下限値の範囲から外れているか否かを判定すると共に当該走行速度がこの範囲から外れていた場合に警報を発する手順
を実行させることを特徴とする自動車用変速制御プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−2619(P2013−2619A)
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願番号】特願2011−137633(P2011−137633)
【出願日】平成23年6月21日(2011.6.21)
【出願人】(390001395)NECシステムテクノロジー株式会社 (438)
【Fターム(参考)】
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願日】平成23年6月21日(2011.6.21)
【出願人】(390001395)NECシステムテクノロジー株式会社 (438)
【Fターム(参考)】
[ Back to top ]