
自動車
【課題】液圧ブレーキ装置の液圧調整用のバルブの作動回数が耐久性を考慮した作動回数を超えた以降に、車両の他の部品に比して液圧ブレーキ装置におけるバルブの破損だけが早期に生じるのを抑制しつつ、車両の燃費の悪化を抑制する。
【解決手段】バルブ作動回数Nvに応じてカウントダウンすると共に設定距離Lsetを走行する毎にカウントアップするカウンタCを計算し(S110〜S170)、カウンタCが値0以上のときには運転者のブレーキ操作に対してブレーキ協調制御を実行し(S190)、カウンタCが値0未満のときには運転者のブレーキ操作に対してブレーキ協調制御は実行せずに油圧ブレーキ制御を実行する(S200)。これにより、バルブの作動頻度を少なくし、車両の他の部品に比してバルブの破損だけが早期に生じるのを抑制すると共に車両の燃費の悪化を抑制することができる。
【解決手段】バルブ作動回数Nvに応じてカウントダウンすると共に設定距離Lsetを走行する毎にカウントアップするカウンタCを計算し(S110〜S170)、カウンタCが値0以上のときには運転者のブレーキ操作に対してブレーキ協調制御を実行し(S190)、カウンタCが値0未満のときには運転者のブレーキ操作に対してブレーキ協調制御は実行せずに油圧ブレーキ制御を実行する(S200)。これにより、バルブの作動頻度を少なくし、車両の他の部品に比してバルブの破損だけが早期に生じるのを抑制すると共に車両の燃費の悪化を抑制することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自動車に関し、詳しくは、走行用の動力を入出力する電動機と、液圧源からの作動液の供給と作動液のリザーバへの排出を調節する調節バルブの開閉により制動力を調節する液圧ブレーキ装置と、運転者のブレーキ操作に対して電動機による制動力と液圧ブレーキ装置による制動力とを用いてブレーキ操作に応じた制動力を車両に作用させるよう電動機と液圧ブレーキ装置とを制御するブレーキ協調制御を実行するブレーキ制御手段と、を備える自動車に関する。
【背景技術】
【0002】
従来、この種の自動車としては、運転者がブレーキペダルを踏み込むと、モータによる回生ブレーキと油圧駆動による油圧ブレーキとを協調させて車両に制動力を付与するものが提案されている(例えば、特許文献1参照)。この自動車では、車速が小さくなると回生ブレーキを油圧ブレーキに置き換えることにより、低車速で回生ブレーキを作用させ得ることによる減速度の脈動を抑制している。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2004−328884号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述の自動車では、回生ブレーキと油圧ブレーキとによる協調制御を行なうために油圧ブレーキ装置の油圧調整用のバルブが頻繁に作動する結果、運転者の使用状況によっては、車両の走行距離に比してバルブの作動回数が早期に耐久性を考慮した作動回数を超えてしまう場合が生じる。この場合、継続して回生ブレーキと油圧ブレーキとによる協調制御を実行すればバルブの破損などの不都合が早期に生じることとなり、協調制御を実行しないものとすれば車両のエネルギ効率が低下して燃費が悪化してしまう。
【0005】
本発明の自動車では、回生ブレーキと液圧ブレーキとにより車両に制動力を付与する自動車において、液圧ブレーキ装置の液圧調整用のバルブの作動回数が耐久性を考慮した作動回数を超えた以降に、車両の他の部品に比して液圧ブレーキ装置におけるバルブの破損だけが早期に生じるのを抑制しつつ、車両の燃費の悪化を抑制することを主目的とする。
【課題を解決するための手段】
【0006】
本発明の自動車は、上述の主目的を達成するために以下の手段を採った。
【0007】
本発明の自動車は、
走行用の動力を入出力する電動機と、液圧源からの液圧を調節する調節バルブの開閉により車両に作用する制動力を調節する液圧ブレーキ装置と、運転者のブレーキ操作に対して前記電動機による制動力と前記液圧ブレーキ装置による制動力とを用いて前記ブレーキ操作に応じた制動力を車両に作用させるよう前記電動機と前記液圧ブレーキ装置とを制御するブレーキ協調制御を実行するブレーキ制御手段と、を備える自動車であって、
前記ブレーキ制御手段は、前記調節バルブの作動回数が該調節バルブの耐用性を考慮して予め定められた所定回数に至った以降は、車両が所定距離走行する毎にカウントアップすると共に前記調節バルブを作動する毎にカウントダウンするようカウンタを計算し、前記カウンタが値0以上のときには前記ブレーキ協調制御を実行し、前記カウンタが値0未満のときには前記電動機による制動力を用いずに前記液圧ブレーキ装置による制動力により前記ブレーキ操作に応じた制動力を車両に作用させるよう前記電動機と前記液圧ブレーキ装置とを制御する液圧ブレーキ制御を実行する手段である、
ことを要旨とする。
【0008】
この本発明の自動車では、液圧ブレーキ装置における液圧源からの液圧を調節する調節バルブの作動回数がこの調節バルブの耐用性を考慮して予め定められた所定回数に至った以降は、車両が所定距離走行する毎にカウントアップすると共に調節バルブを作動する毎にカウントダウンするようカウンタを計算し、カウンタが値0以上のときには電動機による制動力と液圧ブレーキ装置による制動力とを用いて運転者のブレーキ操作に応じた制動力を車両に作用させるよう電動機と液圧ブレーキ装置とを制御するブレーキ協調制御を実行し、カウンタが値0未満のときには電動機による制動力を用いずに液圧ブレーキ装置による制動力によりブレーキ操作に応じた制動力を車両に作用させるよう電動機と液圧ブレーキ装置とを制御する液圧ブレーキ制御を実行する。即ち、走行距離に応じてブレーキ協調制御を実行したり液圧ブレーキ制御を実行するのである。このように、車両が所定距離走行する毎にカウントアップすると共に調節バルブを作動する毎にカウントダウンするようカウンタを用いてブレーキ協調制御と液圧ブレーキ制御とを切り換えることにより、車両の他の部品に比して液圧ブレーキ装置における調節バルブの破損だけが早期に生じるのを抑制することができると共に、ブレーキ協調制御を実行せずに液圧ブレーキ制御だけを実行するものに比して車両の燃費の悪化を抑制することができる。
【図面の簡単な説明】
【0009】
【図1】本発明の一実施例としてのハイブリッド自動車20の構成の概略を示す構成図である。
【図2】ブレーキアクチュエータ94の構成の一例を示す構成図である。
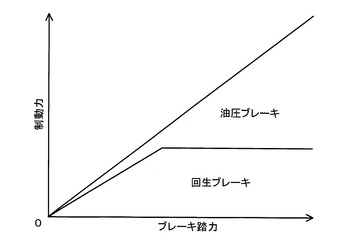
【図3】通常時におけるブレーキ踏力に対して回生ブレーキによる制動力と油圧ブレーキによる制動力とを設定するためのマップの一例を示す説明図である。
【図4】極低速走行時等のブレーキ踏力に対する油圧ブレーキによる制動力の関係の一例を示す説明図である。
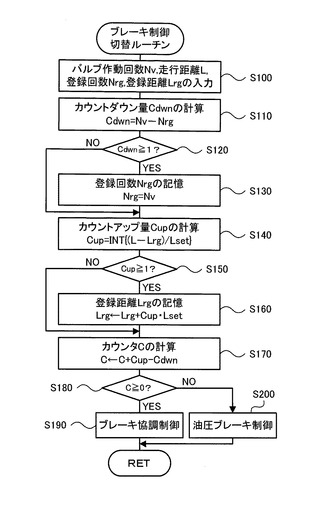
【図5】ブレーキECU96により実行されるブレーキ制御切替ルーチンの一例を示すフローチャートである。
【発明を実施するための形態】
【0010】
次に、本発明を実施するための形態を実施例を用いて説明する。
【実施例】
【0011】
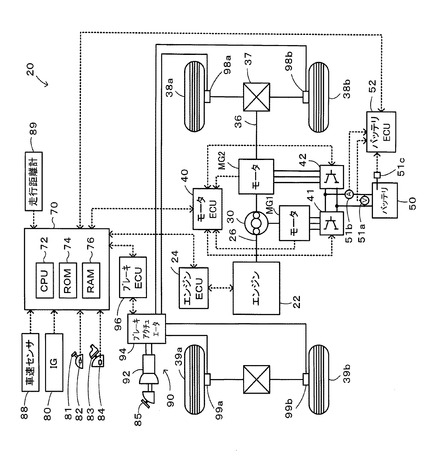
図1は、本発明の一実施例としてのハイブリッド自動車20の構成の概略を示す構成図である。実施例のハイブリッド自動車20は、図示するように、ガソリンや軽油などを燃料とするエンジン22と、エンジン22を駆動制御するエンジン用電子制御ユニット(以下、エンジンECUという。)24と、エンジン22のクランクシャフト26にキャリアが接続されると共に駆動輪としての前輪38a,38bにデファレンシャルギヤ37を介して連結された駆動軸36にリングギヤが接続されたプラネタリギヤ30と、例えば同期発電電動機として構成されて回転子がプラネタリギヤ30のサンギヤに接続されたモータMG1と、例えば同期発電電動機として構成されて回転子が駆動軸36に接続されたモータMG2と、モータMG1,MG2を駆動するためのインバータ41,42と、インバータ41,42の図示しないスイッチング素子をスイッチング制御することによってモータMG1,MG2を駆動制御するモータ用電子制御ユニット(以下、モータECUという。)40と、インバータ41,42を介してモータMG1,MG2と電力をやりとりするバッテリ50と、バッテリ50を管理するバッテリ用電子制御ユニット(以下、バッテリECUという)52と、ブレーキペダル85の踏み込みに応じて油圧を発生させるハイドロブースタ92と左右前後輪38a,38b,39a,39bに取り付けられたブレーキホイールシリンダ98a,98b,99a,99bへの油圧を調整するブレーキアクチュエータ94とブレーキアクチュエータ94を制御するブレーキ用電子制御ユニット(以下、ブレーキECUという。)96とを有する油圧ブレーキ装置90と、イグニッションスイッチ80からのイグニッション信号やシフトレバー81のポジションを検出するシフトポジションセンサ82からのシフトポジションSP,アクセルペダル83の踏み込み量を検出するアクセルペダルポジションセンサ84からのアクセル開度Acc,車速センサ88からの車速V,走行距離計89からの走行距離Lを入力すると共にエンジンECU24やモータECU40,バッテリECU52,ブレーキECU96と通信して車両全体を制御するハイブリッド用電子制御ユニット70と、を備える。
【0012】
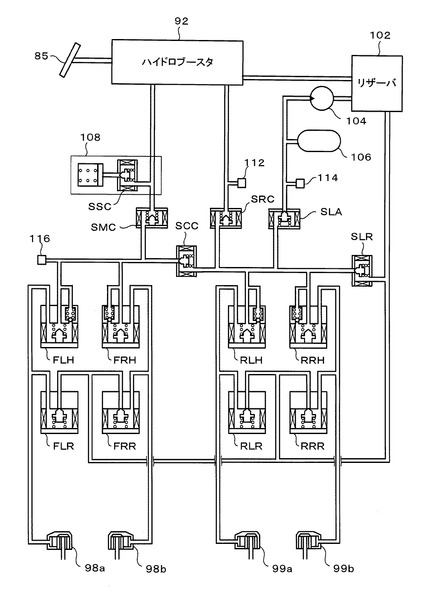
図2は、ブレーキアクチュエータ94の構成の一例を示す構成図である。ブレーキアクチュエータ94は、作動オイルを蓄えるリザーバ102と、リザーバからの作動オイルを加圧するオイルポンプ104と、オイルポンプ104により加圧された圧力を保持するためのアキュムレータ106と、左右前輪38a,38bのブレーキホイールシリンダ98a,98bの油圧を増圧する増圧用制御ソレノイドバルブFLH,FRHと、左右前輪38a,38bのブレーキホイールシリンダ98a,98bの油圧を減圧する減圧用制御ソレノイドバルブFLR,FRRと、左右後輪39a,39bのブレーキホイールシリンダ99a,99bの油圧を増圧する増圧用制御ソレノイドバルブRLH,RRHと、左右後輪39a,39bのブレーキホイールシリンダ99a,99bの油圧を減圧する減圧用制御ソレノイドバルブRLR,RRRと、ハイドロブースタ92からの油圧をカットするためのカット用切替ソレノイドバルブSMC,SRCと、オイルポンプ104およびアキュムレータ106からの油圧を供給するための油圧供給用リニアソレノイドバルブSLAと、前輪系と後輪系との油圧の連絡を司る車輪系連絡切替ソレノイドバルブSCCと、油圧の供給系と解除系との連絡を司る系統連絡リニアソレノイドバルブSLRと、ハイドロブースタ92での油圧を調整するためのストロークシミュレータ108と、を備える。なお、ストロークシミュレータ108には、その機能を用いないようにするための切替ソレノイドバルブSSCが取り付けられている。
【0013】
また、ブレーキアクチュエータ94には、カット用切替ソレノイドバルブSRCよりハイドロブースタ92側にはハイドロブースタ92により生じる油圧を検出するためのレギュレータ油圧センサ112、油圧供給用リニアソレノイドバルブSLAよりアキュムレータ106側にはアキュムレータ106の油圧を検出するためのアキュムレータ油圧センサ114、カット用切替ソレノイドバルブSMCよりブレーキホイールシリンダ98a,98b側にはブレーキホイールシリンダ98a,98bの油圧を検出するためのホイールシリンダ油圧センサ116がそれぞれ取り付けられており、その検出信号がブレーキECU96に入力されている。
【0014】
ブレーキECU96は、図示しないが、CPUを中心とするマイクロコンピュータとして構成されており、CPUの他にROMやRAM、入出力ポートなどを備え、必要に応じてブレーキアクチュエータの各バルブを開閉制御する。例えば、通常時の走行中には、切替ソレノイドバルブSSCと車輪系連絡切替ソレノイドバルブSCCとを開成すると共にカット用切替ソレノイドバルブSMC,SRCを閉成した状態、即ち、ハイドロブースタ92からの各ブレーキホイールシリンダ98a,98b,99a,99bへの油圧回路を閉じた状態とし、油圧供給用リニアソレノイドバルブSLAと系統連絡リニアソレノイドバルブSLRとを制御することにより、運転者のブレーキペダル85の踏み込み力(ブレーキ踏力)をレギュレータ油圧センサ112によって踏み込み油圧として検出し、ブレーキ踏力に対して油圧ブレーキにより車両に作用させるべき制動力を図3に例示するマップから導出し、導出した油圧ブレーキ制動力が作用するように、各ブレーキホイールシリンダ98a,98b,99a,99bの油圧の増圧や保持、減圧を行なうブレーキ協調制御による油圧制御を実行する。一方、極低速走行時やバッテリ50の蓄電割合SOCが大きいときには、切替ソレノイドバルブSSCと車輪系連絡切替ソレノイドバルブSCCとを閉成すると共にカット用切替ソレノイドバルブSMC,SRCを開成した状態、即ち、ハイドロブースタ92からの各ブレーキホイールシリンダ98a,98b,99a,99bへの油圧回路を開いた状態とし、ハイドロブースタ92の油圧が各ブレーキホイールシリンダ98a,98b,99a,99bに連絡されるようにして、図4に示すように、ブレーキ踏力の全てが油圧ブレーキによる制動力として作用する油圧ブレーキ制御による油圧制御を実行する。また、ブレーキECU96は、運転者がブレーキペダル85を踏み込んだときに駆動輪39a,39bや従動輪のいずれかがロックによりスリップするのを防止するアンチロックブレーキシステム機能(ABS)や運転者がアクセルペダル83を踏み込んだときに駆動輪39a,39bのいずれかが空転によりスリップするのを防止するトラクションコントロール(TRC),車両が旋回走行しているときに姿勢を保持する姿勢保持制御(VSC)なども行なう。なお、ブレーキECU96は、油圧供給用リニアソレノイドバルブSLAを作動するとその作動回数をカウントし、バルブ作動回数Nvとして記憶している。
【0015】
こうして構成された実施例のハイブリッド自動車20は、運転者によるアクセルペダル83の踏み込み量に対応するアクセル開度Accと車速Vとに基づいて駆動軸36に出力すべき要求トルクTr*を計算し、この要求トルクTr*に対応する要求パワーが駆動軸36に出力されるように、エンジン22とモータMG1とモータMG2とが運転制御される。エンジン22とモータMG1とモータMG2の運転制御としては、要求パワーに見合う動力がエンジン22から出力されるようにエンジン22を運転制御すると共にエンジン22から出力されるパワーのすべてがプラネタリギヤ30とモータMG1とモータMG2とによってトルク変換されて駆動軸36に出力されるようモータMG1およびモータMG2を駆動制御するトルク変換運転モードや要求パワーとバッテリ50の充放電に必要な電力との和に見合うパワーがエンジン22から出力されるようにエンジン22を運転制御すると共にバッテリ50の充放電を伴ってエンジン22から出力されるパワーの全部またはその一部がプラネタリギヤ30とモータMG1とモータMG2とによるトルク変換を伴って要求パワーが駆動軸36に出力されるようモータMG1およびモータMG2を駆動制御する充放電運転モード、エンジン22の運転を停止してモータMG2からの要求パワーに見合う動力を駆動軸36に出力するよう運転制御するモータ運転モードなどがある。なお、トルク変換運転モードと充放電運転モードは、いずれもエンジン22の運転を伴って要求動力が駆動軸36に出力されるようエンジン22とモータMG1,MG2とを制御するモードであり、実質的な制御における差異はないため、以下、両者を合わせてエンジン運転モードという。
【0016】
エンジン運転モードでは、ハイブリッド用電子制御ユニット70は、アクセルペダルポジションセンサ84からのアクセル開度Accと車速センサ88からの車速Vとに基づいて駆動軸36に出力すべき要求トルクTr*を設定し、設定した要求トルクTr*に駆動軸36の回転数Nd(例えば、モータMG2の回転数Nm2)を乗じて走行に要求される走行用パワーPr*を計算すると共に計算した走行用パワーPr*からバッテリ50の残容量(SOC)に基づいて得られるバッテリ50の充放電要求パワーPb*(バッテリ50から放電するときが正の値)を減じてエンジン22から出力すべきパワーとしての要求パワーPe*を設定し、要求パワーPe*を効率よくエンジン22から出力することができるエンジン22の回転数NeとトルクTeとの関係としての動作ライン(例えば燃費最適動作ライン)を用いてエンジン22の目標回転数Ne*と目標トルクTe*とを設定し、バッテリ50の入出力制限Win,Woutの範囲内で、エンジン22の回転数Neが目標回転数Ne*となるようにするための回転数フィードバック制御によりモータMG1から出力すべきトルクとしてのトルク指令Tm1*を設定すると共にモータMG1をトルク指令Tm1*で駆動したときにプラネタリギヤ30を介して駆動軸36に作用するトルクを要求トルクTr*から減じてモータMG2のトルク指令Tm2*を設定し、目標回転数Ne*と目標トルクTe*とについてエンジンECU24に送信し、トルク指令Tm1*,Tm2*についてはモータECU40に送信する。そして、目標回転数Ne*と目標トルクTe*とを受信したエンジンECU24は、目標回転数Ne*と目標トルクTe*とによってエンジン22が運転されるようエンジン22の吸入空気量制御や燃料噴射制御,点火制御などを行なう。また、トルク指令Tm1*,Tm2*を受信したモータECU40は、モータMG1,MG2がトルク指令Tm1*,Tm2*で駆動されるようインバータ41,42のスイッチング素子のスイッチング制御を行なう。
【0017】
モータ運転モードでは、ハイブリッド用電子制御ユニット70は、モータMG1のトルク指令Tm1*に値0を設定する共にバッテリ50の入出力制限Win,Woutの範囲内で要求トルクTr*が駆動軸36に出力されるようモータMG2のトルク指令Tm2*を設定してモータECU40に送信する。そして、トルク指令Tm1*,Tm2*を受信したモータECU40は、モータMG1,MG2がトルク指令Tm1*,Tm2*で駆動されるようインバータ41,42のスイッチング素子のスイッチング制御を行なう。
【0018】
次に、実施例のハイブリッド自動車20の動作、特にブレーキアクチュエータ94の油圧供給用リニアソレノイドバルブSLAの作動回数(バルブ作動回数)Nvが油圧供給用リニアソレノイドバルブSLAの耐用性を考慮して定められた耐用基準回数以上に至った以降に運転者がブレーキペダル85を踏み込んだときの動作について説明する。図5は、ブレーキECU96により実行されるブレーキ制御切替ルーチンの一例を示すフローチャートである。このルーチンは、所定時間毎(例えば、30秒毎など)に繰り返し実行される。
【0019】
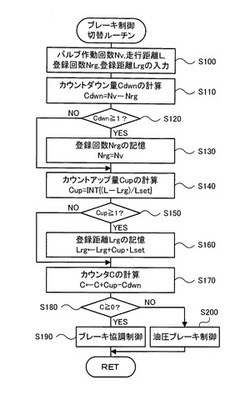
ブレーキ制御切替ルーチンが実行されると、ブレーキECU96は、まず、バルブ作動回数Nvや走行距離L,登録回数Nrg,登録距離Lrgなどのブレーキ制御を切り換えるために必要なデータを入力する処理を実行する(ステップS100)。ここで、バルブ作動回数Nvについては、油圧供給用リニアソレノイドバルブSLAを作動する毎にカウントして記憶したものを読み込むことにより入力するものとした。また、走行距離Lについては、走行距離計89により計測された走行距離Lをハイブリッド用電子制御ユニット70から通信により入力するものとした。登録回数Nrg,登録距離Lrgについては、このルーチンで計算されて記憶されたものを読み込むことにより入力するものとした。登録回数Nrg,登録距離Lrgの意義については後述する。
【0020】
こうしてデータを入力すると、バルブ作動回数Nvから登録回数Nrgを減じてカウントダウン量Cdwnを計算すると共に(ステップS110)、計算したカウントダウン量Cdwnが値1以上であるか否かを判定し(ステップS120)、カウントダウン量Cdwnが値1以上のときにはバルブ作動回数Nvを登録回数Nrgとして記憶する(ステップS130)。登録回数Nrgは、カウントダウン量Cdwnが値1以上として計算されたときのバルブ作動回数Nvであるから、前回このルーチンが実行されたときのバルブ作動回数Nvとなる。続いて、走行距離Lから登録距離Lrgを減じたものを設定距離Lsetで除したものの整数部分を取り出すことによりカウントアップ量Cupを計算すると共に(ステップS140)、計算したカウントアップ量Cupが値1以上であるか否かを判定し(ステップS150)、カウントアップ量Cupが値1以上のときには、設定距離Lsetにカウントアップ量Cupを乗じたものを登録距離Lrgに加えて得られる値を新たな登録距離Lrgとして記憶する(ステップS160)。ここで、設定距離Lsetは、カウントアップ量Cupを値1だけアップさせる走行距離として予め定められたものであり、例えば400mや500mなどを用いることができる。したがって、登録距離Lrgは、カウントアップ量Cupが値1以上として計算されたときに、カウントアップ量Cupに見合う走行距離を意味することになる。
【0021】
そして、カウンタCにカウンタアップ量Cupを加えてカウントダウン量Cdwnを減じて新たなカウンタCを計算し、カウンタCが値0以上のときにはブレーキ制御としてブレーキ協調制御を設定して(ステップS180,S190)、本ルーチンを終了し、カウンタCが値0未満のときにはブレーキ制御として油圧ブレーキ制御を設定して(ステップS180,S200)、本ルーチンを終了する。ブレーキ制御としてブレーキ協調制御が設定されると、走行中に運転者がブレーキペダル85を踏み込むと、図3の回生ブレーキ分についてはモータMG2を回生制御することによって制動力を作用させると共に、油圧ブレーキ分については切替ソレノイドバルブSSCと車輪系連絡切替ソレノイドバルブSCCとを開成すると共にカット用切替ソレノイドバルブSMC,SRCを閉成した状態で油圧供給用リニアソレノイドバルブSLAと系統連絡リニアソレノイドバルブSLRとを制御して各ブレーキホイールシリンダ98a,98b,99a,99bの油圧の増圧や保持、減圧を行なうことにより油圧ブレーキによる制動力を作用させる。ブレーキ制御として油圧ブレーキ制御が設定されると、走行中に運転者がブレーキペダル85を踏み込んでも、モータMG2を回生制御することなく、切替ソレノイドバルブSSCと車輪系連絡切替ソレノイドバルブSCCとを閉成すると共にカット用切替ソレノイドバルブSMC,SRCを開成した状態でハイドロブースタ92の油圧が各ブレーキホイールシリンダ98a,98b,99a,99bに連絡されるようにしてブレーキ踏力の全てが油圧ブレーキによる制動力として作用するようにする。このように、ブレーキ協調制御と油圧ブレーキ制御とを切り替えることにより、ブレーキアクチュエータ94の油圧供給用リニアソレノイドバルブSLAや系統連絡リニアソレノイドバルブSLRの作動頻度を少なくし、車両の他の部品に比して油圧供給用リニアソレノイドバルブSLAや系統連絡リニアソレノイドバルブSLRの破損だけが早期に生じるのを抑制することができる。
【0022】
以上説明した実施例のハイブリッド自動車20によれば、ブレーキアクチュエータ94の油圧供給用リニアソレノイドバルブSLAの作動回数(バルブ作動回数)Nvが油圧供給用リニアソレノイドバルブSLAの耐用性を考慮して定められた耐用基準回数以上に至った以降は、油圧供給用リニアソレノイドバルブSLAの作動回数に応じてカウントダウンすると共に設定距離Lsetを走行する毎にカウントアップするカウンタCを計算し、カウンタCが値0以上のときには運転者のブレーキペダル85の操作に対してブレーキ協調制御を実行し、カウンタCが値0未満のときには運転者のブレーキペダル85の操作に対してブレーキ協調制御は実行せずに油圧ブレーキ制御を実行することにより、ブレーキアクチュエータ94の油圧供給用リニアソレノイドバルブSLAや系統連絡リニアソレノイドバルブSLRの作動頻度を少なくして、車両の他の部品に比して油圧供給用リニアソレノイドバルブSLAや系統連絡リニアソレノイドバルブSLRの破損だけが早期に生じるのを抑制することができる。また、走行距離Lに応じてブレーキ協調制御も実行するので、ブレーキ協調制御を実行しないものに比して車両の燃費の悪化を抑制することができる。
【0023】
実施例の主要な要素と課題を解決するための手段の欄に記載した発明の主要な要素との対応関係について説明する。実施例では、モータMG2が「電動機」に相当し、油圧ブレーキ装置90が「液圧ブレーキ装置」に相当し、通常時の走行中に運転者がブレーキペダル85を踏み込んだときにはブレーキ協調制御を実行し、油圧供給用リニアソレノイドバルブSLAの作動回数(バルブ作動回数)Nvが油圧供給用リニアソレノイドバルブSLAの耐用性を考慮して定められた耐用基準回数以上に至った以降に走行中に運転者がブレーキペダル85を踏み込んだときには、油圧供給用リニアソレノイドバルブSLAの作動回数に応じてカウントダウンすると共に設定距離Lsetを走行する毎にカウントアップするカウンタCを計算し、カウンタCが値0以上のときにはブレーキ協調制御を実行し、カウンタCが値0未満のときにはブレーキ協調制御は実行せずに油圧ブレーキ制御を実行する図5のブレーキ制御切替ルーチンを実行するブレーキECU96とモータMG2を制御するハイブリッド用電子制御ユニット70とが「ブレーキ制御手段」に相当する。
【0024】
なお、実施例の主要な要素と課題を解決するための手段の欄に記載した発明の主要な要素との対応関係は、実施例が課題を解決するための手段の欄に記載した発明を実施するための形態を具体的に説明するための一例であることから、課題を解決するための手段の欄に記載した発明の要素を限定するものではない。即ち、課題を解決するための手段の欄に記載した発明についての解釈はその欄の記載に基づいて行なわれるべきものであり、実施例は課題を解決するための手段の欄に記載した発明の具体的な一例に過ぎないものである。
【0025】
以上、本発明を実施するための形態について実施例を用いて説明したが、本発明はこうした実施例に何等限定されるものではなく、本発明の要旨を逸脱しない範囲内において、種々なる形態で実施し得ることは勿論である。
【産業上の利用可能性】
【0026】
本発明は、自動車の製造産業などに利用可能である。
【符号の説明】
【0027】
20 ハイブリッド自動車、22 エンジン、24 エンジン用電子制御ユニット(エンジンECU)、26 クランクシャフト、30 プラネタリギヤ、36 駆動軸、37 デファレンシャルギヤ、38a,38b 前輪、39a,39b 後輪、40 モータ用電子制御ユニット(モータECU)、41,42 インバータ、50 バッテリ、70 ハイブリッド用電子制御ユニット、80 イグニッションスイッチ、81 シフトレバー、82 シフトポジションセンサ、83 アクセルペダル、84 アクセルペダルポジションセンサ、85 ブレーキペダル、88 車速センサ、89 走行距離計、90 油圧ブレーキ装置、92 ハイドロブースタ、94 ブレーキアクチュエータ、96 ブレーキ用電子制御ユニット(ブレーキECU)、98a,98b,99a,99b ブレーキホイールシリンダ、102 リザーバ、104 オイルポンプ、106 アキュムレータ、108 ストロークシミュレータ、112 レギュレータ油圧センサ、114 アキュムレータ油圧センサ、116 ホイールシリンダ油圧センサ、FLH,FRH,RLH,RRH 増圧用制御ソレノイドバルブ、FLR,FRR,RLR,RRR 減圧用制御ソレノイドバルブ、SMC,SRC カット用切替ソレノイドバルブ、SLA 油圧供給用リニアソレノイドバルブ、SCC 車輪系連絡切替ソレノイドバルブ、SLR 系統連絡リニアソレノイドバルブ、SSC 切替ソレノイドバルブ、MG1,MG2 モータ。
【技術分野】
【0001】
本発明は、自動車に関し、詳しくは、走行用の動力を入出力する電動機と、液圧源からの作動液の供給と作動液のリザーバへの排出を調節する調節バルブの開閉により制動力を調節する液圧ブレーキ装置と、運転者のブレーキ操作に対して電動機による制動力と液圧ブレーキ装置による制動力とを用いてブレーキ操作に応じた制動力を車両に作用させるよう電動機と液圧ブレーキ装置とを制御するブレーキ協調制御を実行するブレーキ制御手段と、を備える自動車に関する。
【背景技術】
【0002】
従来、この種の自動車としては、運転者がブレーキペダルを踏み込むと、モータによる回生ブレーキと油圧駆動による油圧ブレーキとを協調させて車両に制動力を付与するものが提案されている(例えば、特許文献1参照)。この自動車では、車速が小さくなると回生ブレーキを油圧ブレーキに置き換えることにより、低車速で回生ブレーキを作用させ得ることによる減速度の脈動を抑制している。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2004−328884号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述の自動車では、回生ブレーキと油圧ブレーキとによる協調制御を行なうために油圧ブレーキ装置の油圧調整用のバルブが頻繁に作動する結果、運転者の使用状況によっては、車両の走行距離に比してバルブの作動回数が早期に耐久性を考慮した作動回数を超えてしまう場合が生じる。この場合、継続して回生ブレーキと油圧ブレーキとによる協調制御を実行すればバルブの破損などの不都合が早期に生じることとなり、協調制御を実行しないものとすれば車両のエネルギ効率が低下して燃費が悪化してしまう。
【0005】
本発明の自動車では、回生ブレーキと液圧ブレーキとにより車両に制動力を付与する自動車において、液圧ブレーキ装置の液圧調整用のバルブの作動回数が耐久性を考慮した作動回数を超えた以降に、車両の他の部品に比して液圧ブレーキ装置におけるバルブの破損だけが早期に生じるのを抑制しつつ、車両の燃費の悪化を抑制することを主目的とする。
【課題を解決するための手段】
【0006】
本発明の自動車は、上述の主目的を達成するために以下の手段を採った。
【0007】
本発明の自動車は、
走行用の動力を入出力する電動機と、液圧源からの液圧を調節する調節バルブの開閉により車両に作用する制動力を調節する液圧ブレーキ装置と、運転者のブレーキ操作に対して前記電動機による制動力と前記液圧ブレーキ装置による制動力とを用いて前記ブレーキ操作に応じた制動力を車両に作用させるよう前記電動機と前記液圧ブレーキ装置とを制御するブレーキ協調制御を実行するブレーキ制御手段と、を備える自動車であって、
前記ブレーキ制御手段は、前記調節バルブの作動回数が該調節バルブの耐用性を考慮して予め定められた所定回数に至った以降は、車両が所定距離走行する毎にカウントアップすると共に前記調節バルブを作動する毎にカウントダウンするようカウンタを計算し、前記カウンタが値0以上のときには前記ブレーキ協調制御を実行し、前記カウンタが値0未満のときには前記電動機による制動力を用いずに前記液圧ブレーキ装置による制動力により前記ブレーキ操作に応じた制動力を車両に作用させるよう前記電動機と前記液圧ブレーキ装置とを制御する液圧ブレーキ制御を実行する手段である、
ことを要旨とする。
【0008】
この本発明の自動車では、液圧ブレーキ装置における液圧源からの液圧を調節する調節バルブの作動回数がこの調節バルブの耐用性を考慮して予め定められた所定回数に至った以降は、車両が所定距離走行する毎にカウントアップすると共に調節バルブを作動する毎にカウントダウンするようカウンタを計算し、カウンタが値0以上のときには電動機による制動力と液圧ブレーキ装置による制動力とを用いて運転者のブレーキ操作に応じた制動力を車両に作用させるよう電動機と液圧ブレーキ装置とを制御するブレーキ協調制御を実行し、カウンタが値0未満のときには電動機による制動力を用いずに液圧ブレーキ装置による制動力によりブレーキ操作に応じた制動力を車両に作用させるよう電動機と液圧ブレーキ装置とを制御する液圧ブレーキ制御を実行する。即ち、走行距離に応じてブレーキ協調制御を実行したり液圧ブレーキ制御を実行するのである。このように、車両が所定距離走行する毎にカウントアップすると共に調節バルブを作動する毎にカウントダウンするようカウンタを用いてブレーキ協調制御と液圧ブレーキ制御とを切り換えることにより、車両の他の部品に比して液圧ブレーキ装置における調節バルブの破損だけが早期に生じるのを抑制することができると共に、ブレーキ協調制御を実行せずに液圧ブレーキ制御だけを実行するものに比して車両の燃費の悪化を抑制することができる。
【図面の簡単な説明】
【0009】
【図1】本発明の一実施例としてのハイブリッド自動車20の構成の概略を示す構成図である。
【図2】ブレーキアクチュエータ94の構成の一例を示す構成図である。
【図3】通常時におけるブレーキ踏力に対して回生ブレーキによる制動力と油圧ブレーキによる制動力とを設定するためのマップの一例を示す説明図である。
【図4】極低速走行時等のブレーキ踏力に対する油圧ブレーキによる制動力の関係の一例を示す説明図である。
【図5】ブレーキECU96により実行されるブレーキ制御切替ルーチンの一例を示すフローチャートである。
【発明を実施するための形態】
【0010】
次に、本発明を実施するための形態を実施例を用いて説明する。
【実施例】
【0011】
図1は、本発明の一実施例としてのハイブリッド自動車20の構成の概略を示す構成図である。実施例のハイブリッド自動車20は、図示するように、ガソリンや軽油などを燃料とするエンジン22と、エンジン22を駆動制御するエンジン用電子制御ユニット(以下、エンジンECUという。)24と、エンジン22のクランクシャフト26にキャリアが接続されると共に駆動輪としての前輪38a,38bにデファレンシャルギヤ37を介して連結された駆動軸36にリングギヤが接続されたプラネタリギヤ30と、例えば同期発電電動機として構成されて回転子がプラネタリギヤ30のサンギヤに接続されたモータMG1と、例えば同期発電電動機として構成されて回転子が駆動軸36に接続されたモータMG2と、モータMG1,MG2を駆動するためのインバータ41,42と、インバータ41,42の図示しないスイッチング素子をスイッチング制御することによってモータMG1,MG2を駆動制御するモータ用電子制御ユニット(以下、モータECUという。)40と、インバータ41,42を介してモータMG1,MG2と電力をやりとりするバッテリ50と、バッテリ50を管理するバッテリ用電子制御ユニット(以下、バッテリECUという)52と、ブレーキペダル85の踏み込みに応じて油圧を発生させるハイドロブースタ92と左右前後輪38a,38b,39a,39bに取り付けられたブレーキホイールシリンダ98a,98b,99a,99bへの油圧を調整するブレーキアクチュエータ94とブレーキアクチュエータ94を制御するブレーキ用電子制御ユニット(以下、ブレーキECUという。)96とを有する油圧ブレーキ装置90と、イグニッションスイッチ80からのイグニッション信号やシフトレバー81のポジションを検出するシフトポジションセンサ82からのシフトポジションSP,アクセルペダル83の踏み込み量を検出するアクセルペダルポジションセンサ84からのアクセル開度Acc,車速センサ88からの車速V,走行距離計89からの走行距離Lを入力すると共にエンジンECU24やモータECU40,バッテリECU52,ブレーキECU96と通信して車両全体を制御するハイブリッド用電子制御ユニット70と、を備える。
【0012】
図2は、ブレーキアクチュエータ94の構成の一例を示す構成図である。ブレーキアクチュエータ94は、作動オイルを蓄えるリザーバ102と、リザーバからの作動オイルを加圧するオイルポンプ104と、オイルポンプ104により加圧された圧力を保持するためのアキュムレータ106と、左右前輪38a,38bのブレーキホイールシリンダ98a,98bの油圧を増圧する増圧用制御ソレノイドバルブFLH,FRHと、左右前輪38a,38bのブレーキホイールシリンダ98a,98bの油圧を減圧する減圧用制御ソレノイドバルブFLR,FRRと、左右後輪39a,39bのブレーキホイールシリンダ99a,99bの油圧を増圧する増圧用制御ソレノイドバルブRLH,RRHと、左右後輪39a,39bのブレーキホイールシリンダ99a,99bの油圧を減圧する減圧用制御ソレノイドバルブRLR,RRRと、ハイドロブースタ92からの油圧をカットするためのカット用切替ソレノイドバルブSMC,SRCと、オイルポンプ104およびアキュムレータ106からの油圧を供給するための油圧供給用リニアソレノイドバルブSLAと、前輪系と後輪系との油圧の連絡を司る車輪系連絡切替ソレノイドバルブSCCと、油圧の供給系と解除系との連絡を司る系統連絡リニアソレノイドバルブSLRと、ハイドロブースタ92での油圧を調整するためのストロークシミュレータ108と、を備える。なお、ストロークシミュレータ108には、その機能を用いないようにするための切替ソレノイドバルブSSCが取り付けられている。
【0013】
また、ブレーキアクチュエータ94には、カット用切替ソレノイドバルブSRCよりハイドロブースタ92側にはハイドロブースタ92により生じる油圧を検出するためのレギュレータ油圧センサ112、油圧供給用リニアソレノイドバルブSLAよりアキュムレータ106側にはアキュムレータ106の油圧を検出するためのアキュムレータ油圧センサ114、カット用切替ソレノイドバルブSMCよりブレーキホイールシリンダ98a,98b側にはブレーキホイールシリンダ98a,98bの油圧を検出するためのホイールシリンダ油圧センサ116がそれぞれ取り付けられており、その検出信号がブレーキECU96に入力されている。
【0014】
ブレーキECU96は、図示しないが、CPUを中心とするマイクロコンピュータとして構成されており、CPUの他にROMやRAM、入出力ポートなどを備え、必要に応じてブレーキアクチュエータの各バルブを開閉制御する。例えば、通常時の走行中には、切替ソレノイドバルブSSCと車輪系連絡切替ソレノイドバルブSCCとを開成すると共にカット用切替ソレノイドバルブSMC,SRCを閉成した状態、即ち、ハイドロブースタ92からの各ブレーキホイールシリンダ98a,98b,99a,99bへの油圧回路を閉じた状態とし、油圧供給用リニアソレノイドバルブSLAと系統連絡リニアソレノイドバルブSLRとを制御することにより、運転者のブレーキペダル85の踏み込み力(ブレーキ踏力)をレギュレータ油圧センサ112によって踏み込み油圧として検出し、ブレーキ踏力に対して油圧ブレーキにより車両に作用させるべき制動力を図3に例示するマップから導出し、導出した油圧ブレーキ制動力が作用するように、各ブレーキホイールシリンダ98a,98b,99a,99bの油圧の増圧や保持、減圧を行なうブレーキ協調制御による油圧制御を実行する。一方、極低速走行時やバッテリ50の蓄電割合SOCが大きいときには、切替ソレノイドバルブSSCと車輪系連絡切替ソレノイドバルブSCCとを閉成すると共にカット用切替ソレノイドバルブSMC,SRCを開成した状態、即ち、ハイドロブースタ92からの各ブレーキホイールシリンダ98a,98b,99a,99bへの油圧回路を開いた状態とし、ハイドロブースタ92の油圧が各ブレーキホイールシリンダ98a,98b,99a,99bに連絡されるようにして、図4に示すように、ブレーキ踏力の全てが油圧ブレーキによる制動力として作用する油圧ブレーキ制御による油圧制御を実行する。また、ブレーキECU96は、運転者がブレーキペダル85を踏み込んだときに駆動輪39a,39bや従動輪のいずれかがロックによりスリップするのを防止するアンチロックブレーキシステム機能(ABS)や運転者がアクセルペダル83を踏み込んだときに駆動輪39a,39bのいずれかが空転によりスリップするのを防止するトラクションコントロール(TRC),車両が旋回走行しているときに姿勢を保持する姿勢保持制御(VSC)なども行なう。なお、ブレーキECU96は、油圧供給用リニアソレノイドバルブSLAを作動するとその作動回数をカウントし、バルブ作動回数Nvとして記憶している。
【0015】
こうして構成された実施例のハイブリッド自動車20は、運転者によるアクセルペダル83の踏み込み量に対応するアクセル開度Accと車速Vとに基づいて駆動軸36に出力すべき要求トルクTr*を計算し、この要求トルクTr*に対応する要求パワーが駆動軸36に出力されるように、エンジン22とモータMG1とモータMG2とが運転制御される。エンジン22とモータMG1とモータMG2の運転制御としては、要求パワーに見合う動力がエンジン22から出力されるようにエンジン22を運転制御すると共にエンジン22から出力されるパワーのすべてがプラネタリギヤ30とモータMG1とモータMG2とによってトルク変換されて駆動軸36に出力されるようモータMG1およびモータMG2を駆動制御するトルク変換運転モードや要求パワーとバッテリ50の充放電に必要な電力との和に見合うパワーがエンジン22から出力されるようにエンジン22を運転制御すると共にバッテリ50の充放電を伴ってエンジン22から出力されるパワーの全部またはその一部がプラネタリギヤ30とモータMG1とモータMG2とによるトルク変換を伴って要求パワーが駆動軸36に出力されるようモータMG1およびモータMG2を駆動制御する充放電運転モード、エンジン22の運転を停止してモータMG2からの要求パワーに見合う動力を駆動軸36に出力するよう運転制御するモータ運転モードなどがある。なお、トルク変換運転モードと充放電運転モードは、いずれもエンジン22の運転を伴って要求動力が駆動軸36に出力されるようエンジン22とモータMG1,MG2とを制御するモードであり、実質的な制御における差異はないため、以下、両者を合わせてエンジン運転モードという。
【0016】
エンジン運転モードでは、ハイブリッド用電子制御ユニット70は、アクセルペダルポジションセンサ84からのアクセル開度Accと車速センサ88からの車速Vとに基づいて駆動軸36に出力すべき要求トルクTr*を設定し、設定した要求トルクTr*に駆動軸36の回転数Nd(例えば、モータMG2の回転数Nm2)を乗じて走行に要求される走行用パワーPr*を計算すると共に計算した走行用パワーPr*からバッテリ50の残容量(SOC)に基づいて得られるバッテリ50の充放電要求パワーPb*(バッテリ50から放電するときが正の値)を減じてエンジン22から出力すべきパワーとしての要求パワーPe*を設定し、要求パワーPe*を効率よくエンジン22から出力することができるエンジン22の回転数NeとトルクTeとの関係としての動作ライン(例えば燃費最適動作ライン)を用いてエンジン22の目標回転数Ne*と目標トルクTe*とを設定し、バッテリ50の入出力制限Win,Woutの範囲内で、エンジン22の回転数Neが目標回転数Ne*となるようにするための回転数フィードバック制御によりモータMG1から出力すべきトルクとしてのトルク指令Tm1*を設定すると共にモータMG1をトルク指令Tm1*で駆動したときにプラネタリギヤ30を介して駆動軸36に作用するトルクを要求トルクTr*から減じてモータMG2のトルク指令Tm2*を設定し、目標回転数Ne*と目標トルクTe*とについてエンジンECU24に送信し、トルク指令Tm1*,Tm2*についてはモータECU40に送信する。そして、目標回転数Ne*と目標トルクTe*とを受信したエンジンECU24は、目標回転数Ne*と目標トルクTe*とによってエンジン22が運転されるようエンジン22の吸入空気量制御や燃料噴射制御,点火制御などを行なう。また、トルク指令Tm1*,Tm2*を受信したモータECU40は、モータMG1,MG2がトルク指令Tm1*,Tm2*で駆動されるようインバータ41,42のスイッチング素子のスイッチング制御を行なう。
【0017】
モータ運転モードでは、ハイブリッド用電子制御ユニット70は、モータMG1のトルク指令Tm1*に値0を設定する共にバッテリ50の入出力制限Win,Woutの範囲内で要求トルクTr*が駆動軸36に出力されるようモータMG2のトルク指令Tm2*を設定してモータECU40に送信する。そして、トルク指令Tm1*,Tm2*を受信したモータECU40は、モータMG1,MG2がトルク指令Tm1*,Tm2*で駆動されるようインバータ41,42のスイッチング素子のスイッチング制御を行なう。
【0018】
次に、実施例のハイブリッド自動車20の動作、特にブレーキアクチュエータ94の油圧供給用リニアソレノイドバルブSLAの作動回数(バルブ作動回数)Nvが油圧供給用リニアソレノイドバルブSLAの耐用性を考慮して定められた耐用基準回数以上に至った以降に運転者がブレーキペダル85を踏み込んだときの動作について説明する。図5は、ブレーキECU96により実行されるブレーキ制御切替ルーチンの一例を示すフローチャートである。このルーチンは、所定時間毎(例えば、30秒毎など)に繰り返し実行される。
【0019】
ブレーキ制御切替ルーチンが実行されると、ブレーキECU96は、まず、バルブ作動回数Nvや走行距離L,登録回数Nrg,登録距離Lrgなどのブレーキ制御を切り換えるために必要なデータを入力する処理を実行する(ステップS100)。ここで、バルブ作動回数Nvについては、油圧供給用リニアソレノイドバルブSLAを作動する毎にカウントして記憶したものを読み込むことにより入力するものとした。また、走行距離Lについては、走行距離計89により計測された走行距離Lをハイブリッド用電子制御ユニット70から通信により入力するものとした。登録回数Nrg,登録距離Lrgについては、このルーチンで計算されて記憶されたものを読み込むことにより入力するものとした。登録回数Nrg,登録距離Lrgの意義については後述する。
【0020】
こうしてデータを入力すると、バルブ作動回数Nvから登録回数Nrgを減じてカウントダウン量Cdwnを計算すると共に(ステップS110)、計算したカウントダウン量Cdwnが値1以上であるか否かを判定し(ステップS120)、カウントダウン量Cdwnが値1以上のときにはバルブ作動回数Nvを登録回数Nrgとして記憶する(ステップS130)。登録回数Nrgは、カウントダウン量Cdwnが値1以上として計算されたときのバルブ作動回数Nvであるから、前回このルーチンが実行されたときのバルブ作動回数Nvとなる。続いて、走行距離Lから登録距離Lrgを減じたものを設定距離Lsetで除したものの整数部分を取り出すことによりカウントアップ量Cupを計算すると共に(ステップS140)、計算したカウントアップ量Cupが値1以上であるか否かを判定し(ステップS150)、カウントアップ量Cupが値1以上のときには、設定距離Lsetにカウントアップ量Cupを乗じたものを登録距離Lrgに加えて得られる値を新たな登録距離Lrgとして記憶する(ステップS160)。ここで、設定距離Lsetは、カウントアップ量Cupを値1だけアップさせる走行距離として予め定められたものであり、例えば400mや500mなどを用いることができる。したがって、登録距離Lrgは、カウントアップ量Cupが値1以上として計算されたときに、カウントアップ量Cupに見合う走行距離を意味することになる。
【0021】
そして、カウンタCにカウンタアップ量Cupを加えてカウントダウン量Cdwnを減じて新たなカウンタCを計算し、カウンタCが値0以上のときにはブレーキ制御としてブレーキ協調制御を設定して(ステップS180,S190)、本ルーチンを終了し、カウンタCが値0未満のときにはブレーキ制御として油圧ブレーキ制御を設定して(ステップS180,S200)、本ルーチンを終了する。ブレーキ制御としてブレーキ協調制御が設定されると、走行中に運転者がブレーキペダル85を踏み込むと、図3の回生ブレーキ分についてはモータMG2を回生制御することによって制動力を作用させると共に、油圧ブレーキ分については切替ソレノイドバルブSSCと車輪系連絡切替ソレノイドバルブSCCとを開成すると共にカット用切替ソレノイドバルブSMC,SRCを閉成した状態で油圧供給用リニアソレノイドバルブSLAと系統連絡リニアソレノイドバルブSLRとを制御して各ブレーキホイールシリンダ98a,98b,99a,99bの油圧の増圧や保持、減圧を行なうことにより油圧ブレーキによる制動力を作用させる。ブレーキ制御として油圧ブレーキ制御が設定されると、走行中に運転者がブレーキペダル85を踏み込んでも、モータMG2を回生制御することなく、切替ソレノイドバルブSSCと車輪系連絡切替ソレノイドバルブSCCとを閉成すると共にカット用切替ソレノイドバルブSMC,SRCを開成した状態でハイドロブースタ92の油圧が各ブレーキホイールシリンダ98a,98b,99a,99bに連絡されるようにしてブレーキ踏力の全てが油圧ブレーキによる制動力として作用するようにする。このように、ブレーキ協調制御と油圧ブレーキ制御とを切り替えることにより、ブレーキアクチュエータ94の油圧供給用リニアソレノイドバルブSLAや系統連絡リニアソレノイドバルブSLRの作動頻度を少なくし、車両の他の部品に比して油圧供給用リニアソレノイドバルブSLAや系統連絡リニアソレノイドバルブSLRの破損だけが早期に生じるのを抑制することができる。
【0022】
以上説明した実施例のハイブリッド自動車20によれば、ブレーキアクチュエータ94の油圧供給用リニアソレノイドバルブSLAの作動回数(バルブ作動回数)Nvが油圧供給用リニアソレノイドバルブSLAの耐用性を考慮して定められた耐用基準回数以上に至った以降は、油圧供給用リニアソレノイドバルブSLAの作動回数に応じてカウントダウンすると共に設定距離Lsetを走行する毎にカウントアップするカウンタCを計算し、カウンタCが値0以上のときには運転者のブレーキペダル85の操作に対してブレーキ協調制御を実行し、カウンタCが値0未満のときには運転者のブレーキペダル85の操作に対してブレーキ協調制御は実行せずに油圧ブレーキ制御を実行することにより、ブレーキアクチュエータ94の油圧供給用リニアソレノイドバルブSLAや系統連絡リニアソレノイドバルブSLRの作動頻度を少なくして、車両の他の部品に比して油圧供給用リニアソレノイドバルブSLAや系統連絡リニアソレノイドバルブSLRの破損だけが早期に生じるのを抑制することができる。また、走行距離Lに応じてブレーキ協調制御も実行するので、ブレーキ協調制御を実行しないものに比して車両の燃費の悪化を抑制することができる。
【0023】
実施例の主要な要素と課題を解決するための手段の欄に記載した発明の主要な要素との対応関係について説明する。実施例では、モータMG2が「電動機」に相当し、油圧ブレーキ装置90が「液圧ブレーキ装置」に相当し、通常時の走行中に運転者がブレーキペダル85を踏み込んだときにはブレーキ協調制御を実行し、油圧供給用リニアソレノイドバルブSLAの作動回数(バルブ作動回数)Nvが油圧供給用リニアソレノイドバルブSLAの耐用性を考慮して定められた耐用基準回数以上に至った以降に走行中に運転者がブレーキペダル85を踏み込んだときには、油圧供給用リニアソレノイドバルブSLAの作動回数に応じてカウントダウンすると共に設定距離Lsetを走行する毎にカウントアップするカウンタCを計算し、カウンタCが値0以上のときにはブレーキ協調制御を実行し、カウンタCが値0未満のときにはブレーキ協調制御は実行せずに油圧ブレーキ制御を実行する図5のブレーキ制御切替ルーチンを実行するブレーキECU96とモータMG2を制御するハイブリッド用電子制御ユニット70とが「ブレーキ制御手段」に相当する。
【0024】
なお、実施例の主要な要素と課題を解決するための手段の欄に記載した発明の主要な要素との対応関係は、実施例が課題を解決するための手段の欄に記載した発明を実施するための形態を具体的に説明するための一例であることから、課題を解決するための手段の欄に記載した発明の要素を限定するものではない。即ち、課題を解決するための手段の欄に記載した発明についての解釈はその欄の記載に基づいて行なわれるべきものであり、実施例は課題を解決するための手段の欄に記載した発明の具体的な一例に過ぎないものである。
【0025】
以上、本発明を実施するための形態について実施例を用いて説明したが、本発明はこうした実施例に何等限定されるものではなく、本発明の要旨を逸脱しない範囲内において、種々なる形態で実施し得ることは勿論である。
【産業上の利用可能性】
【0026】
本発明は、自動車の製造産業などに利用可能である。
【符号の説明】
【0027】
20 ハイブリッド自動車、22 エンジン、24 エンジン用電子制御ユニット(エンジンECU)、26 クランクシャフト、30 プラネタリギヤ、36 駆動軸、37 デファレンシャルギヤ、38a,38b 前輪、39a,39b 後輪、40 モータ用電子制御ユニット(モータECU)、41,42 インバータ、50 バッテリ、70 ハイブリッド用電子制御ユニット、80 イグニッションスイッチ、81 シフトレバー、82 シフトポジションセンサ、83 アクセルペダル、84 アクセルペダルポジションセンサ、85 ブレーキペダル、88 車速センサ、89 走行距離計、90 油圧ブレーキ装置、92 ハイドロブースタ、94 ブレーキアクチュエータ、96 ブレーキ用電子制御ユニット(ブレーキECU)、98a,98b,99a,99b ブレーキホイールシリンダ、102 リザーバ、104 オイルポンプ、106 アキュムレータ、108 ストロークシミュレータ、112 レギュレータ油圧センサ、114 アキュムレータ油圧センサ、116 ホイールシリンダ油圧センサ、FLH,FRH,RLH,RRH 増圧用制御ソレノイドバルブ、FLR,FRR,RLR,RRR 減圧用制御ソレノイドバルブ、SMC,SRC カット用切替ソレノイドバルブ、SLA 油圧供給用リニアソレノイドバルブ、SCC 車輪系連絡切替ソレノイドバルブ、SLR 系統連絡リニアソレノイドバルブ、SSC 切替ソレノイドバルブ、MG1,MG2 モータ。
【特許請求の範囲】
【請求項1】
走行用の動力を入出力する電動機と、液圧源からの液圧を調節する調節バルブの開閉により車両に作用する制動力を調節する液圧ブレーキ装置と、運転者のブレーキ操作に対して前記電動機による制動力と前記液圧ブレーキ装置による制動力とを用いて前記ブレーキ操作に応じた制動力を車両に作用させるよう前記電動機と前記液圧ブレーキ装置とを制御するブレーキ協調制御を実行するブレーキ制御手段と、を備える自動車であって、
前記ブレーキ制御手段は、前記調節バルブの作動回数が該調節バルブの耐用性を考慮して予め定められた所定回数に至った以降は、車両が所定距離走行する毎にカウントアップすると共に前記調節バルブを作動する毎にカウントダウンするようカウンタを計算し、前記カウンタが値0以上のときには前記ブレーキ協調制御を実行し、前記カウンタが値0未満のときには前記電動機による制動力を用いずに前記液圧ブレーキ装置による制動力により前記ブレーキ操作に応じた制動力を車両に作用させるよう前記電動機と前記液圧ブレーキ装置とを制御する液圧ブレーキ制御を実行する手段である、
自動車。
【請求項1】
走行用の動力を入出力する電動機と、液圧源からの液圧を調節する調節バルブの開閉により車両に作用する制動力を調節する液圧ブレーキ装置と、運転者のブレーキ操作に対して前記電動機による制動力と前記液圧ブレーキ装置による制動力とを用いて前記ブレーキ操作に応じた制動力を車両に作用させるよう前記電動機と前記液圧ブレーキ装置とを制御するブレーキ協調制御を実行するブレーキ制御手段と、を備える自動車であって、
前記ブレーキ制御手段は、前記調節バルブの作動回数が該調節バルブの耐用性を考慮して予め定められた所定回数に至った以降は、車両が所定距離走行する毎にカウントアップすると共に前記調節バルブを作動する毎にカウントダウンするようカウンタを計算し、前記カウンタが値0以上のときには前記ブレーキ協調制御を実行し、前記カウンタが値0未満のときには前記電動機による制動力を用いずに前記液圧ブレーキ装置による制動力により前記ブレーキ操作に応じた制動力を車両に作用させるよう前記電動機と前記液圧ブレーキ装置とを制御する液圧ブレーキ制御を実行する手段である、
自動車。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2011−230744(P2011−230744A)
【公開日】平成23年11月17日(2011.11.17)
【国際特許分類】
【出願番号】特願2010−105741(P2010−105741)
【出願日】平成22年4月30日(2010.4.30)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成23年11月17日(2011.11.17)
【国際特許分類】
【出願日】平成22年4月30日(2010.4.30)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]