
自動追尾カメラシステム
【課題】 被写体が移動路に進入する方向を検出し自動追尾撮影を行う自動追尾カメラシステムを提供する。
【解決手段】 自動追尾カメラシステムは、撮影手段と、撮影手段をパン又はチルト方向に回動させる駆動手段と、被写体情報信号を受信する信号受信手段と、映像から被写体を認識し、映像内での被写体の動きを検出する画像信号処理手段と、撮影手段と駆動手段と画像信号処理手段とを制御する制御手段と、移動路のそれぞれに対し、画像信号処理手段が被写体を検出するための待機位置を記憶する記憶手段を有し、制御手段は、被写体情報信号に基づいて被写体が進入する移動路・方角を演算し、記憶手段に記憶されている待機位置から対応する待機位置を選択し、待機位置に駆動手段及びレンズ装置を駆動し、画像信号処理手段が被写体を認識したら、検出された情報に基づき被写体を自動追尾するように駆動手段とレンズ装置を制御する。
【解決手段】 自動追尾カメラシステムは、撮影手段と、撮影手段をパン又はチルト方向に回動させる駆動手段と、被写体情報信号を受信する信号受信手段と、映像から被写体を認識し、映像内での被写体の動きを検出する画像信号処理手段と、撮影手段と駆動手段と画像信号処理手段とを制御する制御手段と、移動路のそれぞれに対し、画像信号処理手段が被写体を検出するための待機位置を記憶する記憶手段を有し、制御手段は、被写体情報信号に基づいて被写体が進入する移動路・方角を演算し、記憶手段に記憶されている待機位置から対応する待機位置を選択し、待機位置に駆動手段及びレンズ装置を駆動し、画像信号処理手段が被写体を認識したら、検出された情報に基づき被写体を自動追尾するように駆動手段とレンズ装置を制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、撮影対象物を自動で追尾する自動追尾カメラシステムに関し、特に航空機を追尾対象として自動追尾カメラシステムに関するものである。
【背景技術】
【0002】
パン及びチルトの旋回動作が可能な電動雲台にカメラが取り付けられた雲台カメラは、遠隔地から雲台制御やカメラ制御が可能なようにケーブル又は無線を介して操作器が接続されている。操作者はモニター画面に表示される映像を見ながら、この操作器を操作して雲台に搭載されているカメラや雲台を制御している。
【0003】
近年、雲台カメラに画像認識技術を搭載して、被写体を自動で認識し、自動追尾する自動追尾カメラシステムが提案されている。これにより操作者が動く被写体に雲台カメラの方向を合わせるように雲台カメラの向きを手動で変更し続けなくても、動きのある被写体を自動追尾して撮影することが可能になる。ただし、画像認識技術を用いて自動追尾撮影を行うためには、被写体がカメラに映らなければ、自動追尾撮影を開始することができない。特に航空機の着陸を撮影する場合、どの滑走路にどの方角から着陸するかは風速・視界等の気象条件及び計器着陸装置の設置状況により変更となるため、画像認識技術を用いた自動追尾を行うことができない場合がある。
例えば、特特許文献1ではレーダー装置を使用し、航空機の位置と方向を検出する技術が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平2006−270404号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に開示された従来技術は、航空機監視の技術であるため、レーダー装置を使用し、航空機の位置と方向を検出している。一般的な撮影用途で航空機を自動追尾撮影するためにレーダー装置を設置することは、費用や設置場所の確保等の面で現実的ではない。
【0006】
そこで、本発明の目的は、高価で大型なレーダー装置を使用することなく航空機が進入する滑走路とその方角を検出し自動追尾撮影を行えることを可能にした自動追尾撮影装置を提供することである。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明の自動追尾カメラシステムは、レンズ装置と撮像装置を含む撮影手段と、前記撮影手段を少なくともパン方向又はチルト方向に回動させる駆動手段と、被写体からの被写体情報信号を受信するための信号受信手段と、前記撮影手段で得られた映像から、被写体を認識し、該映像内での該被写体の動きを検出する、画像信号処理手段と、該撮影手段と、該駆動手段と、前記画像信号処理手段と、を制御する制御手段と、1本以上の移動路のそれぞれに対し、前記画像信号処理手段が被写体を検出するために待機する待機位置を記憶する記憶手段と、を有し、前記制御手段は、前記信号受信手段で得られた該被写体情報信号に基づいて被写体が進入する移動路と進入する方角を演算し、該演算結果に基づき、前記記憶手段に記憶されている前記待機位置から対応する待機位置を選択し、選択された該待機位置に前記駆動手段及び前記レンズ装置を駆動し、前記画像信号処理手段が被写体を認識したら、該画像信号処理手段で検出された情報に基づき該被写体を自動追尾するように前記駆動手段と前記レンズ装置を制御する、ことを特徴とする。
【発明の効果】
【0008】
高価で大型なレーダー装置を使用することなく航空機が離着陸のために進入する滑走路とその方角を検出し航空機を自動追尾して撮影することを可能にした自動追尾カメラシステムを提供することができる。
【図面の簡単な説明】
【0009】
【図1】本発明の自動追尾カメラシステムの構成を示す図である。
【図2】設置した雲台カメラと滑走路との位置関係及び画角を示す図である。
【図3】本発明における自動追尾カメラシステムを用いて航空機を自動追尾撮影するフローを説明する図である。
【発明を実施するための形態】
【0010】
以下に、本発明の自動追尾カメラシステムの好ましい実施の形態を、添付の図面に基づいて詳細に説明する。
【実施例】
【0011】
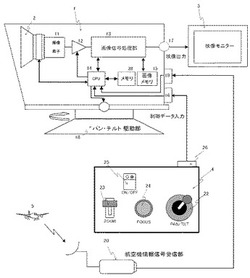
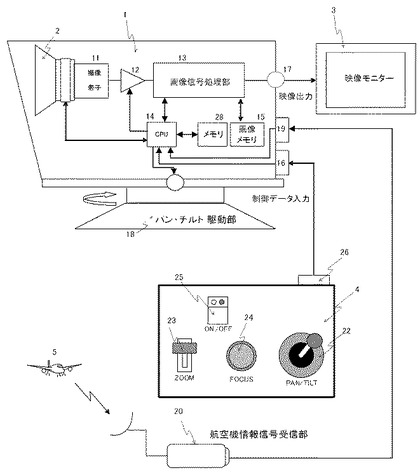
図1は、追尾機能付き撮影装置として遠隔操作される雲台カメラを例にして、本発明の自動追尾カメラシステムの実施形態を示したシステム図である。図1を参照してシステム概要を説明する。
【0012】
図1に示すように、本発明の自動追尾カメラシステムは、撮像素子11を含む撮像装置とレンズ装置2からなる撮影手段、撮影手段を搭載し遠隔操作される雲台カメラ1、雲台カメラ1で撮像した映像を表示する映像モニター3、雲台カメラ1を操作するための操作器4、被写体である航空機5被写体の航空機情報信号(被写体情報信号)を受信するための受信部20から構成される。
【0013】
雲台カメラ1において、レンズ装置2を介して撮影された被写体は、撮像素子11上に結像し、増幅部12においてレベル調整された後、画像信号処理部13において画素単位に処理される。その後、画像データとして画像メモリ15に一旦書き込まれ、被写体検出や動き検出のため必要に応じて読み出しが行われる。画像メモリ15から読み出された画像データは、画像信号処理部13において映像モニターで表示可能な出力フォーマットに変換され、映像出力端子17から出力される。制御手段であるCPU(演算処理回路)14は、画像信号処理部13の制御及びパン・チルト駆動手段としてのパン・チルト駆動部18の制御やレンズ装置2のズーム・フォーカス駆動回路の制御等を行っている。
【0014】
操作器4には、パン・チルト駆動部18を駆動して雲台カメラ1をパン方向およびチルト方向へ回動させるための操作レバー22や、レンズ装置2のズームを変更するための調節レバー23や、フォーカス操作ノブ24が搭載されている。さらに、自動追尾のON/OFFを切り替える自動追尾ボタン25も搭載している。これらの自動追尾ボタン25、ズーム調節レバー23、フォーカス操作ノブ24の出力は、操作器4内に搭載された図示していないCPUに入力され、制御子信号に変換され通信端子26から出力される。通信端子26から出力された制御信号は、雲台カメラの通信端子16を介し、雲台カメラ1内のCPU(14)に取り込まれる。CPU(14)は取り込んだ制御信号を解釈し、制御信号の内容に従い制御対象をコントロールする。
【0015】
航空機5からは、識別子、現在の水平方向における位置、高度、対気速度等の情報を含んだ放送型自動従属監視(Automatic Dependent Surveillance-Broadcast)信号(以下、ADS−B信号と記載する)が無線送信されている。航空機情報信号受信部20では航空機5から送信されるADS−B信号(被写体情報信号、航空機情報信号)より航空機の水平方向の位置及び高度等(位置情報)を検出し、そのデータは雲台カメラの通信端子19を介し、CPU(14)に取り込まれる。
【0016】
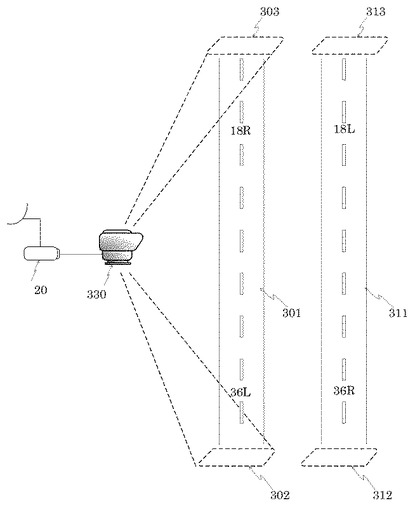
図2に、航空機(被写体)が移動する移動路である滑走路の近くに雲台カメラ1が設置されている例を示す。滑走路は、滑走路番号18Rと36Lが割り当てられている滑走路301と、滑走路番号18Lと36Rが割り当てられている滑走路311、の2本がある。以下、航空交通管制の慣例に倣い、滑走路番号で滑走路を表すものとして記載する。すなわち、滑走路18Rと36Lは、同じ滑走路301上に位置するが、滑走路として航空機が進入する方向は180度異なる。雲台カメラ330は、滑走路の長さ方向をパン操作で見渡せる位置に設置されている。滑走路36Lに着陸のために進入してくる(図2において、下方向から滑走路301に着陸する)航空機を撮影するために雲台カメラ330を待機させるための画角が画角302であり、この画角302に対応するパン・チルト駆動手段18のパン及び、チルト位置、レンズ装置2のズーム及びフォーカス位置は雲台カメラ330内のメモリに予め設定し、記憶手段であるメモリ28に記憶しておく。これにより、航空機を自動追尾するために雲台カメラ330を待機させるための、レンズ装置2の光軸方向、物体距離、画角に対応する、パン・チルト駆動手段、レンズ装置の状態の設定値が記憶される。同様に、滑走路18Rに着陸のため進入してくる(図2において、上方向から滑走路301に着陸する)航空機を撮影するために雲台カメラ330が待機する画角303、滑走路36Rに着陸のために進入してくる(図2において、下方向から滑走路311に着陸する)航空機を撮影するために雲台カメラ330が待機する画角312、滑走路18Lに着陸のために進入してくる(図2において、上方向から滑走路311に着陸する)航空機を撮影するために雲台カメラ330が待機する画角313、それぞれに対応した撮影位置に待機させるためのパン・チルト駆動部のパン及びチルト位置、レンズ装置のズーム及びフォーカス位置があらかじめ設定され、記憶手段であるメモリ28に記憶されている。
【0017】
どの滑走路にどの方角から着陸するかは風向き、視界等の気象条件及び滑走路への計器着陸装置(ILS : Instrument Landing System)の設置有無により管制官が総合的に判断し、航空機に無線で指示を出している。そのため、航空機の運行に直接関わっていない第三者は、どの滑走路(方角を含め)に着陸するかを着陸前に予め知ることはできない。
【0018】
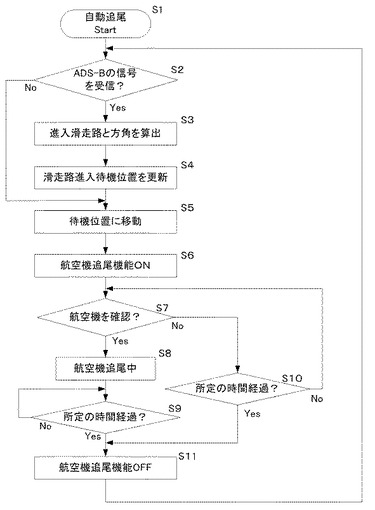
次に図3を参照して本装置が航空機を自動追尾撮影するフローを説明する。
図1の操作器4で自動追尾ボタン25がONに切り替わると、操作器4から自動追尾開始の制御信号がCPU(14)に送信され、自動追尾処理が開始される(S1)。
【0019】
S2では、CPU(14)は、航空機情報信号受信部20でADS−B信号が受信され、航空機の位置、高度データが通信端子19を介し入力されたか否かを判断する。CPU(14)が航空機の位置・高度データを受信した場合はS3に進み、そのデータより航空機が着陸するために進入する滑走路とその方角、すなわち、滑走路18R、36L、18L、36Rのいずれかに進入するか、を演算する。
【0020】
S4では、S3での演算結果である航空機が進入する滑走路と方角データから、あらかじめ設定された撮影待機の画角302、303、312、313のどれが適切かを判断して選択し、雲台カメラ330のパン・チルト駆動部のパン及びチルト位置、レンズ装置のズーム及びフォーカス位置の設定値をその画角に対応したプリセット値に変更する。
【0021】
S2においてCPU(14)が航空機の位置・高度データを受信しなかった場合は、S5に進む。これにより、航空機がADS−B信号を送信していない等の理由により航空機の位置・高度データを取得できない場合は、パン・チルト駆動部のパン及びチルト位置、レンズ装置のズーム及びフォーカス位置の設定値を更新せず、前回のADS−B信号を受信した情報に基づく設定値を使用し、前回の待機位置に移動するようにパン・チルト駆動部とレンズ装置を制御する。
【0022】
S5では、設定されたパン・チルト駆動部のパン及びチルト位置(レンズ装置の光軸方向)、レンズ装置のズーム及びフォーカス位置の値になるように雲台カメラ1を待機位置の画角に移動させる(待機位置は、パン・チルト駆動手段のパン及びチルト位置、及び、レンズ装置のズーム及びフォーカス位置を含む)。
【0023】
雲台カメラ1を待機位置へ向けた後、S6にて航空機認識機能をONにし、雲台カメラ1にて撮影した映像内に航空機が含まれるかを画像認識処理(画像処理)にて検出する。画像認識処理は、既知のテンプレートマッチング法等による画像認識技術を適用して行う。
【0024】
S7では、画像認識処理にて航空機を認識したか否かを判断し、航空機を認識した場合は、画像認識処理で得られた情報に基づき、S8にて航空機が画面上の予め指定された位置に指定された大きさで表示するように、自動でパン・チルト駆動部のパン及びチルト位置、レンズ装置のズーム及びフォーカス位置を制御し自動追尾撮影を行う。なお、追尾時の画面上の航空機の位置とその大きさはS1の処理の前に予め設定されている。
【0025】
S9にて追尾撮影の時間を測定し所定の時間が経過したら、航空機認識機能をOFFし(S11)、航空機情報信号受信部20からの航空機の位置・高度データ受信判断の処理に戻る。ここでの所定の時間というのは、航空機が画像認識処理で認識され、自動追尾撮影を開始してから、航空機が完全に着陸し終わるまでの時間を示す。この時間は設計段階で予め測定している時間であり、適切な時間が設定してある。
【0026】
S7の画像認識処理にて航空機を認識できない場合は、航空機認識処理を継続し、予め設定した所定の時間が経過しても航空機が確認できない場合は航空機認識機能をOFFし(S11)、航空機情報信号受信部20での航空機の位置・高度データ受信判断の処理に戻る。
【0027】
上記の実施例においては、滑走路に航空機が着陸する場合を例示して、本発明の自動追尾カメラシステムの適用を記載したが、本発明はこれに限定されることはなく、滑走路から航空機が離陸する場合にも同様に適用可能である。すなわち、各滑走路に対して、離陸時の航空機を撮影するために待機する画角を予め設定し、その画角に対するパン・チルト駆動手段18のパン及びチルト位置、レンズ装置2のズーム及びフォーカス位置をメモリに記憶し、離陸しようとする航空機からのADS−B信号を受信することにより、離陸滑走路を特定し、雲台カメラを対応するプリセット値に駆動し、画面内に航空機を認識してからは、画像処理で自動追尾を開始することで、離陸する航空機に対しても、本発明を適用することが可能である。
【0028】
更に、本発明は、航空機に限定されることはなく、被写体自身の位置情報を送信しながら移動している被写体であれば、本発明を適用することが可能である。例えば、被写体として、航空機に加え、地上を走行する車輌や、水上を航行する船舶等に対して、適用可能である。また、移動路とは、追尾する予定である被写体の移動が予定されている空間のことであり、滑走路に代わる移動路として、航空路、道路、軌道、水上航路、などに対して適用が可能である。被写体や移動路の種類によって、撮影手段をパン方向及びチルト方向に回動させる駆動部のみならず、撮影手段をパン方向又はチルト方向のいずれか一方に回動させる駆動部を駆動手段として用いてもよい。
【0029】
以上、本発明の好ましい実施形態について説明したが、本発明はこれらの実施形態に限定されない。2本の滑走路の場合を例示したが、1本以上の滑走路に航空機が進入する場合等、その要旨の範囲内で種々の変形及び変更が可能である。
【符号の説明】
【0030】
1 雲台カメラ
2 レンズ装置
3 モニター
4 操作器
13 画像信号処理部(画像信号処理手段)
14 CPU(制御手段)
18 パン・チルト駆動部(駆動手段)
20 航空機情報信号受信部(信号受信手段)
28 メモリ(記憶手段)
301,311,18R,18L,36R,36L:滑走路(移動路)
【技術分野】
【0001】
本発明は、撮影対象物を自動で追尾する自動追尾カメラシステムに関し、特に航空機を追尾対象として自動追尾カメラシステムに関するものである。
【背景技術】
【0002】
パン及びチルトの旋回動作が可能な電動雲台にカメラが取り付けられた雲台カメラは、遠隔地から雲台制御やカメラ制御が可能なようにケーブル又は無線を介して操作器が接続されている。操作者はモニター画面に表示される映像を見ながら、この操作器を操作して雲台に搭載されているカメラや雲台を制御している。
【0003】
近年、雲台カメラに画像認識技術を搭載して、被写体を自動で認識し、自動追尾する自動追尾カメラシステムが提案されている。これにより操作者が動く被写体に雲台カメラの方向を合わせるように雲台カメラの向きを手動で変更し続けなくても、動きのある被写体を自動追尾して撮影することが可能になる。ただし、画像認識技術を用いて自動追尾撮影を行うためには、被写体がカメラに映らなければ、自動追尾撮影を開始することができない。特に航空機の着陸を撮影する場合、どの滑走路にどの方角から着陸するかは風速・視界等の気象条件及び計器着陸装置の設置状況により変更となるため、画像認識技術を用いた自動追尾を行うことができない場合がある。
例えば、特特許文献1ではレーダー装置を使用し、航空機の位置と方向を検出する技術が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平2006−270404号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に開示された従来技術は、航空機監視の技術であるため、レーダー装置を使用し、航空機の位置と方向を検出している。一般的な撮影用途で航空機を自動追尾撮影するためにレーダー装置を設置することは、費用や設置場所の確保等の面で現実的ではない。
【0006】
そこで、本発明の目的は、高価で大型なレーダー装置を使用することなく航空機が進入する滑走路とその方角を検出し自動追尾撮影を行えることを可能にした自動追尾撮影装置を提供することである。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明の自動追尾カメラシステムは、レンズ装置と撮像装置を含む撮影手段と、前記撮影手段を少なくともパン方向又はチルト方向に回動させる駆動手段と、被写体からの被写体情報信号を受信するための信号受信手段と、前記撮影手段で得られた映像から、被写体を認識し、該映像内での該被写体の動きを検出する、画像信号処理手段と、該撮影手段と、該駆動手段と、前記画像信号処理手段と、を制御する制御手段と、1本以上の移動路のそれぞれに対し、前記画像信号処理手段が被写体を検出するために待機する待機位置を記憶する記憶手段と、を有し、前記制御手段は、前記信号受信手段で得られた該被写体情報信号に基づいて被写体が進入する移動路と進入する方角を演算し、該演算結果に基づき、前記記憶手段に記憶されている前記待機位置から対応する待機位置を選択し、選択された該待機位置に前記駆動手段及び前記レンズ装置を駆動し、前記画像信号処理手段が被写体を認識したら、該画像信号処理手段で検出された情報に基づき該被写体を自動追尾するように前記駆動手段と前記レンズ装置を制御する、ことを特徴とする。
【発明の効果】
【0008】
高価で大型なレーダー装置を使用することなく航空機が離着陸のために進入する滑走路とその方角を検出し航空機を自動追尾して撮影することを可能にした自動追尾カメラシステムを提供することができる。
【図面の簡単な説明】
【0009】
【図1】本発明の自動追尾カメラシステムの構成を示す図である。
【図2】設置した雲台カメラと滑走路との位置関係及び画角を示す図である。
【図3】本発明における自動追尾カメラシステムを用いて航空機を自動追尾撮影するフローを説明する図である。
【発明を実施するための形態】
【0010】
以下に、本発明の自動追尾カメラシステムの好ましい実施の形態を、添付の図面に基づいて詳細に説明する。
【実施例】
【0011】
図1は、追尾機能付き撮影装置として遠隔操作される雲台カメラを例にして、本発明の自動追尾カメラシステムの実施形態を示したシステム図である。図1を参照してシステム概要を説明する。
【0012】
図1に示すように、本発明の自動追尾カメラシステムは、撮像素子11を含む撮像装置とレンズ装置2からなる撮影手段、撮影手段を搭載し遠隔操作される雲台カメラ1、雲台カメラ1で撮像した映像を表示する映像モニター3、雲台カメラ1を操作するための操作器4、被写体である航空機5被写体の航空機情報信号(被写体情報信号)を受信するための受信部20から構成される。
【0013】
雲台カメラ1において、レンズ装置2を介して撮影された被写体は、撮像素子11上に結像し、増幅部12においてレベル調整された後、画像信号処理部13において画素単位に処理される。その後、画像データとして画像メモリ15に一旦書き込まれ、被写体検出や動き検出のため必要に応じて読み出しが行われる。画像メモリ15から読み出された画像データは、画像信号処理部13において映像モニターで表示可能な出力フォーマットに変換され、映像出力端子17から出力される。制御手段であるCPU(演算処理回路)14は、画像信号処理部13の制御及びパン・チルト駆動手段としてのパン・チルト駆動部18の制御やレンズ装置2のズーム・フォーカス駆動回路の制御等を行っている。
【0014】
操作器4には、パン・チルト駆動部18を駆動して雲台カメラ1をパン方向およびチルト方向へ回動させるための操作レバー22や、レンズ装置2のズームを変更するための調節レバー23や、フォーカス操作ノブ24が搭載されている。さらに、自動追尾のON/OFFを切り替える自動追尾ボタン25も搭載している。これらの自動追尾ボタン25、ズーム調節レバー23、フォーカス操作ノブ24の出力は、操作器4内に搭載された図示していないCPUに入力され、制御子信号に変換され通信端子26から出力される。通信端子26から出力された制御信号は、雲台カメラの通信端子16を介し、雲台カメラ1内のCPU(14)に取り込まれる。CPU(14)は取り込んだ制御信号を解釈し、制御信号の内容に従い制御対象をコントロールする。
【0015】
航空機5からは、識別子、現在の水平方向における位置、高度、対気速度等の情報を含んだ放送型自動従属監視(Automatic Dependent Surveillance-Broadcast)信号(以下、ADS−B信号と記載する)が無線送信されている。航空機情報信号受信部20では航空機5から送信されるADS−B信号(被写体情報信号、航空機情報信号)より航空機の水平方向の位置及び高度等(位置情報)を検出し、そのデータは雲台カメラの通信端子19を介し、CPU(14)に取り込まれる。
【0016】
図2に、航空機(被写体)が移動する移動路である滑走路の近くに雲台カメラ1が設置されている例を示す。滑走路は、滑走路番号18Rと36Lが割り当てられている滑走路301と、滑走路番号18Lと36Rが割り当てられている滑走路311、の2本がある。以下、航空交通管制の慣例に倣い、滑走路番号で滑走路を表すものとして記載する。すなわち、滑走路18Rと36Lは、同じ滑走路301上に位置するが、滑走路として航空機が進入する方向は180度異なる。雲台カメラ330は、滑走路の長さ方向をパン操作で見渡せる位置に設置されている。滑走路36Lに着陸のために進入してくる(図2において、下方向から滑走路301に着陸する)航空機を撮影するために雲台カメラ330を待機させるための画角が画角302であり、この画角302に対応するパン・チルト駆動手段18のパン及び、チルト位置、レンズ装置2のズーム及びフォーカス位置は雲台カメラ330内のメモリに予め設定し、記憶手段であるメモリ28に記憶しておく。これにより、航空機を自動追尾するために雲台カメラ330を待機させるための、レンズ装置2の光軸方向、物体距離、画角に対応する、パン・チルト駆動手段、レンズ装置の状態の設定値が記憶される。同様に、滑走路18Rに着陸のため進入してくる(図2において、上方向から滑走路301に着陸する)航空機を撮影するために雲台カメラ330が待機する画角303、滑走路36Rに着陸のために進入してくる(図2において、下方向から滑走路311に着陸する)航空機を撮影するために雲台カメラ330が待機する画角312、滑走路18Lに着陸のために進入してくる(図2において、上方向から滑走路311に着陸する)航空機を撮影するために雲台カメラ330が待機する画角313、それぞれに対応した撮影位置に待機させるためのパン・チルト駆動部のパン及びチルト位置、レンズ装置のズーム及びフォーカス位置があらかじめ設定され、記憶手段であるメモリ28に記憶されている。
【0017】
どの滑走路にどの方角から着陸するかは風向き、視界等の気象条件及び滑走路への計器着陸装置(ILS : Instrument Landing System)の設置有無により管制官が総合的に判断し、航空機に無線で指示を出している。そのため、航空機の運行に直接関わっていない第三者は、どの滑走路(方角を含め)に着陸するかを着陸前に予め知ることはできない。
【0018】
次に図3を参照して本装置が航空機を自動追尾撮影するフローを説明する。
図1の操作器4で自動追尾ボタン25がONに切り替わると、操作器4から自動追尾開始の制御信号がCPU(14)に送信され、自動追尾処理が開始される(S1)。
【0019】
S2では、CPU(14)は、航空機情報信号受信部20でADS−B信号が受信され、航空機の位置、高度データが通信端子19を介し入力されたか否かを判断する。CPU(14)が航空機の位置・高度データを受信した場合はS3に進み、そのデータより航空機が着陸するために進入する滑走路とその方角、すなわち、滑走路18R、36L、18L、36Rのいずれかに進入するか、を演算する。
【0020】
S4では、S3での演算結果である航空機が進入する滑走路と方角データから、あらかじめ設定された撮影待機の画角302、303、312、313のどれが適切かを判断して選択し、雲台カメラ330のパン・チルト駆動部のパン及びチルト位置、レンズ装置のズーム及びフォーカス位置の設定値をその画角に対応したプリセット値に変更する。
【0021】
S2においてCPU(14)が航空機の位置・高度データを受信しなかった場合は、S5に進む。これにより、航空機がADS−B信号を送信していない等の理由により航空機の位置・高度データを取得できない場合は、パン・チルト駆動部のパン及びチルト位置、レンズ装置のズーム及びフォーカス位置の設定値を更新せず、前回のADS−B信号を受信した情報に基づく設定値を使用し、前回の待機位置に移動するようにパン・チルト駆動部とレンズ装置を制御する。
【0022】
S5では、設定されたパン・チルト駆動部のパン及びチルト位置(レンズ装置の光軸方向)、レンズ装置のズーム及びフォーカス位置の値になるように雲台カメラ1を待機位置の画角に移動させる(待機位置は、パン・チルト駆動手段のパン及びチルト位置、及び、レンズ装置のズーム及びフォーカス位置を含む)。
【0023】
雲台カメラ1を待機位置へ向けた後、S6にて航空機認識機能をONにし、雲台カメラ1にて撮影した映像内に航空機が含まれるかを画像認識処理(画像処理)にて検出する。画像認識処理は、既知のテンプレートマッチング法等による画像認識技術を適用して行う。
【0024】
S7では、画像認識処理にて航空機を認識したか否かを判断し、航空機を認識した場合は、画像認識処理で得られた情報に基づき、S8にて航空機が画面上の予め指定された位置に指定された大きさで表示するように、自動でパン・チルト駆動部のパン及びチルト位置、レンズ装置のズーム及びフォーカス位置を制御し自動追尾撮影を行う。なお、追尾時の画面上の航空機の位置とその大きさはS1の処理の前に予め設定されている。
【0025】
S9にて追尾撮影の時間を測定し所定の時間が経過したら、航空機認識機能をOFFし(S11)、航空機情報信号受信部20からの航空機の位置・高度データ受信判断の処理に戻る。ここでの所定の時間というのは、航空機が画像認識処理で認識され、自動追尾撮影を開始してから、航空機が完全に着陸し終わるまでの時間を示す。この時間は設計段階で予め測定している時間であり、適切な時間が設定してある。
【0026】
S7の画像認識処理にて航空機を認識できない場合は、航空機認識処理を継続し、予め設定した所定の時間が経過しても航空機が確認できない場合は航空機認識機能をOFFし(S11)、航空機情報信号受信部20での航空機の位置・高度データ受信判断の処理に戻る。
【0027】
上記の実施例においては、滑走路に航空機が着陸する場合を例示して、本発明の自動追尾カメラシステムの適用を記載したが、本発明はこれに限定されることはなく、滑走路から航空機が離陸する場合にも同様に適用可能である。すなわち、各滑走路に対して、離陸時の航空機を撮影するために待機する画角を予め設定し、その画角に対するパン・チルト駆動手段18のパン及びチルト位置、レンズ装置2のズーム及びフォーカス位置をメモリに記憶し、離陸しようとする航空機からのADS−B信号を受信することにより、離陸滑走路を特定し、雲台カメラを対応するプリセット値に駆動し、画面内に航空機を認識してからは、画像処理で自動追尾を開始することで、離陸する航空機に対しても、本発明を適用することが可能である。
【0028】
更に、本発明は、航空機に限定されることはなく、被写体自身の位置情報を送信しながら移動している被写体であれば、本発明を適用することが可能である。例えば、被写体として、航空機に加え、地上を走行する車輌や、水上を航行する船舶等に対して、適用可能である。また、移動路とは、追尾する予定である被写体の移動が予定されている空間のことであり、滑走路に代わる移動路として、航空路、道路、軌道、水上航路、などに対して適用が可能である。被写体や移動路の種類によって、撮影手段をパン方向及びチルト方向に回動させる駆動部のみならず、撮影手段をパン方向又はチルト方向のいずれか一方に回動させる駆動部を駆動手段として用いてもよい。
【0029】
以上、本発明の好ましい実施形態について説明したが、本発明はこれらの実施形態に限定されない。2本の滑走路の場合を例示したが、1本以上の滑走路に航空機が進入する場合等、その要旨の範囲内で種々の変形及び変更が可能である。
【符号の説明】
【0030】
1 雲台カメラ
2 レンズ装置
3 モニター
4 操作器
13 画像信号処理部(画像信号処理手段)
14 CPU(制御手段)
18 パン・チルト駆動部(駆動手段)
20 航空機情報信号受信部(信号受信手段)
28 メモリ(記憶手段)
301,311,18R,18L,36R,36L:滑走路(移動路)
【特許請求の範囲】
【請求項1】
レンズ装置と撮像装置を含む撮影手段と、
前記撮影手段を少なくともパン方向又はチルト方向に回動させる駆動手段と、
被写体からの被写体情報信号を受信するための信号受信手段と、
前記撮影手段で得られた映像から、被写体を認識し、該映像内での該被写体の動きを検出する、画像信号処理手段と、
該撮影手段と、該駆動手段と、前記画像信号処理手段と、を制御する制御手段と、
1本以上の移動路のそれぞれに対し、前記画像信号処理手段が被写体を検出するために待機する待機位置を記憶する記憶手段と、
を有し、
前記制御手段は、前記信号受信手段で得られた該被写体情報信号に基づいて被写体が進入する移動路と進入する方角を演算し、該演算結果に基づき、前記記憶手段に記憶されている前記待機位置から対応する待機位置を選択し、選択された該待機位置に前記駆動手段及び前記レンズ装置を駆動し、前記画像信号処理手段が被写体を認識したら、該画像信号処理手段で検出された情報に基づき該被写体を自動追尾するように前記駆動手段と前記レンズ装置を制御する、
ことを特徴とする自動追尾カメラシステム。
【請求項2】
レンズ装置と撮像装置を含む撮影手段と、
前記撮影手段をパン方向及びチルト方向に回動させるパン・チルト駆動手段と、
航空機からの航空機情報信号を受信するための信号受信手段と、
前記撮影手段で得られた映像から、航空機を認識し、該映像内での該航空機の動きを検出する、画像信号処理手段と、
該撮影手段と、該パン・チルト駆動手段と、前記画像信号処理手段と、を制御する制御手段と、
1本以上の滑走路のそれぞれに対し、前記画像信号処理手段が航空機を検出するために待機する待機位置を記憶する記憶手段と、
を有し、
前記制御手段は、前記信号受信手段で得られた該航空機情報信号に基づいて航空機が進入する滑走路と進入する方角を演算し、該演算結果に基づき、前記記憶手段に記憶されている前記待機位置から対応する待機位置を選択し、選択された該待機位置に前記パン・チルト駆動手段及び前記レンズ装置を駆動し、前記画像信号処理手段が航空機を認識したら、該画像信号処理手段で検出された情報に基づき該航空機を自動追尾するように前記パン・チルト駆動手段と前記レンズ装置を制御する、
ことを特徴とする自動追尾カメラシステム。
【請求項3】
前記待機位置は、前記パン・チルト駆動手段のパン及びチルト位置、及び、前記レンズ装置のズーム及びフォーカス位置、を含むことを特徴とする、請求項2に記載の自動追尾カメラシステム。
【請求項4】
前記航空機情報信号は、前記航空機の水平方向の位置と高度を含む、ことを特徴とする請求項2又は3に記載の自動追尾カメラシステム。
【請求項5】
前記制御手段は、所定の時間だけ航空機を自動追尾した後、前記信号受信手段が新たな航空機情報信号を取得できない場合は、前回の待機位置に移動するように前記パン・チルト駆動手段と前記レンズ装置を制御する、ことを特徴とする請求項2乃至4のいずれか1項に記載の自動追尾カメラシステム。
【請求項6】
請求項1に記載の自動追尾カメラシステムを使用した、被写体を自動追尾する方法であって、
被写体から該被写体の位置情報を受信し、
該位置情報に基づいて、該被写体が進入する移動路及び進入する方角を演算し、
前記演算結果に基づき、前記レンズ装置の光軸方向、ズーム及びフォーカス位置を予め記憶されている値の中から待機位置として選択し、
該待機位置となるように、前記駆動手段、及び、該レンズ装置を駆動し、
該待機位置において得られた映像を画像処理することによって該映像内に被写体を検出したら、該画像処理で得られた情報に基づき該被写体を自動追尾するように前記駆動手段と前記レンズ装置を制御する、
ことを特徴とする被写体を自動追尾する方法。
【請求項7】
請求項2に記載の自動追尾カメラシステムを使用した、航空機を自動追尾する方法であって、
航空機から該航空機の位置情報を受信し、
該位置情報に基づいて、該航空機が進入する滑走路及び進入する方角を演算し、
前記演算結果に基づき、前記レンズ装置の光軸方向、ズーム及びフォーカス位置を予め記憶されている値の中から待機位置として選択し、
該待機位置となるように、前記パン・チルト駆動手段、及び、該レンズ装置を駆動し、
該待機位置において得られた映像を画像処理することによって該映像内に航空機を検出したら、該画像処理で得られた情報に基づき該航空機を自動追尾するように前記パン・チルト駆動手段と前記レンズ装置を制御する、
ことを特徴とする航空機を自動追尾する方法。
【請求項1】
レンズ装置と撮像装置を含む撮影手段と、
前記撮影手段を少なくともパン方向又はチルト方向に回動させる駆動手段と、
被写体からの被写体情報信号を受信するための信号受信手段と、
前記撮影手段で得られた映像から、被写体を認識し、該映像内での該被写体の動きを検出する、画像信号処理手段と、
該撮影手段と、該駆動手段と、前記画像信号処理手段と、を制御する制御手段と、
1本以上の移動路のそれぞれに対し、前記画像信号処理手段が被写体を検出するために待機する待機位置を記憶する記憶手段と、
を有し、
前記制御手段は、前記信号受信手段で得られた該被写体情報信号に基づいて被写体が進入する移動路と進入する方角を演算し、該演算結果に基づき、前記記憶手段に記憶されている前記待機位置から対応する待機位置を選択し、選択された該待機位置に前記駆動手段及び前記レンズ装置を駆動し、前記画像信号処理手段が被写体を認識したら、該画像信号処理手段で検出された情報に基づき該被写体を自動追尾するように前記駆動手段と前記レンズ装置を制御する、
ことを特徴とする自動追尾カメラシステム。
【請求項2】
レンズ装置と撮像装置を含む撮影手段と、
前記撮影手段をパン方向及びチルト方向に回動させるパン・チルト駆動手段と、
航空機からの航空機情報信号を受信するための信号受信手段と、
前記撮影手段で得られた映像から、航空機を認識し、該映像内での該航空機の動きを検出する、画像信号処理手段と、
該撮影手段と、該パン・チルト駆動手段と、前記画像信号処理手段と、を制御する制御手段と、
1本以上の滑走路のそれぞれに対し、前記画像信号処理手段が航空機を検出するために待機する待機位置を記憶する記憶手段と、
を有し、
前記制御手段は、前記信号受信手段で得られた該航空機情報信号に基づいて航空機が進入する滑走路と進入する方角を演算し、該演算結果に基づき、前記記憶手段に記憶されている前記待機位置から対応する待機位置を選択し、選択された該待機位置に前記パン・チルト駆動手段及び前記レンズ装置を駆動し、前記画像信号処理手段が航空機を認識したら、該画像信号処理手段で検出された情報に基づき該航空機を自動追尾するように前記パン・チルト駆動手段と前記レンズ装置を制御する、
ことを特徴とする自動追尾カメラシステム。
【請求項3】
前記待機位置は、前記パン・チルト駆動手段のパン及びチルト位置、及び、前記レンズ装置のズーム及びフォーカス位置、を含むことを特徴とする、請求項2に記載の自動追尾カメラシステム。
【請求項4】
前記航空機情報信号は、前記航空機の水平方向の位置と高度を含む、ことを特徴とする請求項2又は3に記載の自動追尾カメラシステム。
【請求項5】
前記制御手段は、所定の時間だけ航空機を自動追尾した後、前記信号受信手段が新たな航空機情報信号を取得できない場合は、前回の待機位置に移動するように前記パン・チルト駆動手段と前記レンズ装置を制御する、ことを特徴とする請求項2乃至4のいずれか1項に記載の自動追尾カメラシステム。
【請求項6】
請求項1に記載の自動追尾カメラシステムを使用した、被写体を自動追尾する方法であって、
被写体から該被写体の位置情報を受信し、
該位置情報に基づいて、該被写体が進入する移動路及び進入する方角を演算し、
前記演算結果に基づき、前記レンズ装置の光軸方向、ズーム及びフォーカス位置を予め記憶されている値の中から待機位置として選択し、
該待機位置となるように、前記駆動手段、及び、該レンズ装置を駆動し、
該待機位置において得られた映像を画像処理することによって該映像内に被写体を検出したら、該画像処理で得られた情報に基づき該被写体を自動追尾するように前記駆動手段と前記レンズ装置を制御する、
ことを特徴とする被写体を自動追尾する方法。
【請求項7】
請求項2に記載の自動追尾カメラシステムを使用した、航空機を自動追尾する方法であって、
航空機から該航空機の位置情報を受信し、
該位置情報に基づいて、該航空機が進入する滑走路及び進入する方角を演算し、
前記演算結果に基づき、前記レンズ装置の光軸方向、ズーム及びフォーカス位置を予め記憶されている値の中から待機位置として選択し、
該待機位置となるように、前記パン・チルト駆動手段、及び、該レンズ装置を駆動し、
該待機位置において得られた映像を画像処理することによって該映像内に航空機を検出したら、該画像処理で得られた情報に基づき該航空機を自動追尾するように前記パン・チルト駆動手段と前記レンズ装置を制御する、
ことを特徴とする航空機を自動追尾する方法。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2013−106267(P2013−106267A)
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願番号】特願2011−249930(P2011−249930)
【出願日】平成23年11月15日(2011.11.15)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願日】平成23年11月15日(2011.11.15)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
[ Back to top ]