
自動通報システム、及び自動通報方法
【課題】プロセス監視制御システムにおいて、プロセスの異常をネットワークを介して運転員に自動通報する機能を、システムが納入された実稼働サイトのみにおいて有効とすることが可能な自動通報システムを提供する。
【解決手段】遠隔配信機構1は、プロセス56の事象が運転監視操作卓102に蓄積されたことを検出する事象取出し部20と、自己の地球上の位置情報を取得する位置情報取得部14と、運転員の操作により、位置情報をサイト位置情報として取得するために位置情報取得部14を起動させるアドレス設定・サイト位置情報設定部12と、事象が蓄積されたことを事象取出し部20が検出したら、位置情報取得部14を起動させて位置情報を現位置情報として取得し、現位置情報とサイト位置情報との差が許容誤差の範囲以内かを判定する位置情報判定部22と、差が範囲以内の場合には、事象を基に作成したメッセージを端末機器に送信する送信部24を備える。
【解決手段】遠隔配信機構1は、プロセス56の事象が運転監視操作卓102に蓄積されたことを検出する事象取出し部20と、自己の地球上の位置情報を取得する位置情報取得部14と、運転員の操作により、位置情報をサイト位置情報として取得するために位置情報取得部14を起動させるアドレス設定・サイト位置情報設定部12と、事象が蓄積されたことを事象取出し部20が検出したら、位置情報取得部14を起動させて位置情報を現位置情報として取得し、現位置情報とサイト位置情報との差が許容誤差の範囲以内かを判定する位置情報判定部22と、差が範囲以内の場合には、事象を基に作成したメッセージを端末機器に送信する送信部24を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、プロセスの監視と制御を行うプロセス監視制御システムにおける自動通報システムに関し、特に、広域運用のプロセス監視制御システムにおける自動通報システムに関する。
【背景技術】
【0002】
昨今、設備の監視制御装置と携帯電話等の情報端末を結び付けた自動通報システムの運用が、プロセス産業の分野でも広く実施されている。自動通報システムを有する監視制御システムの例は、特許文献1に開示されている。自動通報システムを有するプロセス監視制御システムでは、プロセスの運転員は、計器室内にて画面上でプロセスの運転状態を把握し、所要の運転操作を行う。また、運転員がいつどこにいても緊急対応できるように、携帯電話等の情報端末を用いる自動通報システムを有することが一般的になっている。自動通報システムは、プロセスに何らかの異常が生じたら、ネットワークを介して運転員に自動的に通報するシステムである。この自動通報システムにより、運転員が計器室から遠隔の場所にいても、プロセスの異常を自動通報することが可能である。
【0003】
プロセス監視制御システムのメーカは、顧客にシステムを納入した後、不測事態等に備えてのバックアップのため、このような自動通報システムを有するプロセス監視制御システムのソフトウェア全体をそっくり外部媒体に複写し、自社へ持ち帰って保管しておくのが通例である。メーカは、場合によっては、複写したソフトウェアを自社の試験用のシステムにインストールして、再現試験や確認試験等を行うことがある。この際に、自動通報の機能が組込まれているということを失念していると、思いもよらずプロセス異常等の通報が発報され、顧客のプロセス監視制御システムの運転員の携帯電話等にまで届いてしまう場合がある。すなわち、実際には発生していないプロセスの異常等を、顧客サイトのプロセス監視制御システムの運転員に通報してしまい、顧客に迷惑をかける場合がある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2003−186531号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
従来の自動通報システムでは、上述したように、メーカが自社の試験用のシステムで行う再現試験や確認試験等で発生させたプロセス異常(実際には発生していないプロセス異常)を、顧客サイト等の、システムが実稼働しているサイト(実稼働サイト)のプロセス監視制御システムの運転員に自動的に通報してしまう可能性を有する。そこで、実稼働サイト以外で発生したプロセスの異常を、実稼働サイトのプロセス監視制御システムの運転員に通報しないようにすることが望まれている。
【0006】
本発明の目的は、プロセス監視制御システムにおいて、プロセスの異常をネットワークを介して運転員に自動通報する機能を、システムが納入された実稼働サイトのみにおいて有効とすることが可能な自動通報システムを提供することである。
【課題を解決するための手段】
【0007】
本発明による自動通報システムは、次のような特徴を有する。
【0008】
運転監視操作卓とプロセス監視制御装置と遠隔配信機構を備え、前記運転監視操作卓は、前記プロセス監視制御装置から受信したプロセスの事象である警報や指示を蓄積し、前記遠隔配信機構は、前記運転監視操作卓が蓄積した前記事象を基に作成したメッセージを端末機器に送信する送信部を備える。前記遠隔配信機構は、前記運転監視操作卓に前記事象が蓄積されたことを検出し、前記運転監視操作卓から前記事象を取出す事象取出し部と、自己の地球上の位置情報を取得する位置情報取得部と、運転員の操作により、前記位置情報をサイト位置情報として取得するために前記位置情報取得部を起動させるアドレス設定・サイト位置情報設定部と、前記事象取出し部が前記運転監視操作卓に前記事象が蓄積されたことを検出したら、前記位置情報取得部を起動させて前記位置情報を現位置情報として取得し、前記現位置情報と前記サイト位置情報との差が予め定めた許容誤差の範囲以内かどうかを判定する位置情報判定部とを備え、前記差が前記許容誤差の範囲以内の場合には、前記送信部が前記メッセージを前記端末機器に送信する。
【発明の効果】
【0009】
本発明による自動通報システムは、プロセス監視制御システムにおいて、プロセスの異常を運転員に自動通報する機能を、システムが納入された実稼働サイトのみにおいて有効とすることが可能である。このため、実稼働サイト以外に設置された自動通報システムからは、プロセスの異常が実稼働サイトの運転員に自動通報されず、顧客及びメーカのセキュリティ及び信頼性を向上することができる。
【図面の簡単な説明】
【0010】
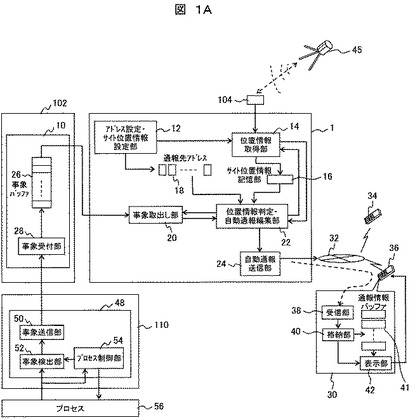
【図1A】自動通報システムの機構を示す図。
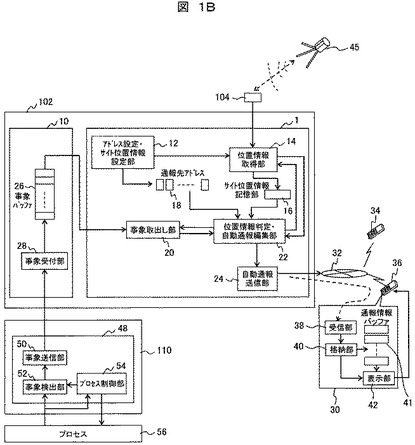
【図1B】運転監視操作卓が遠隔配信機構を有する場合の、自動通報システムの機構を示す図。
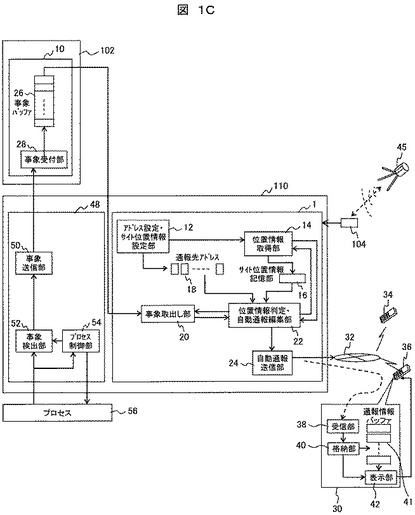
【図1C】プロセス監視制御装置が遠隔配信機構を有する場合の、自動通報システムの機構を示す図。
【図2A】プロセス監視制御システムの構成例を示す図。
【図2B】運転監視操作卓が遠隔配信機構を有する場合の、プロセス監視制御システムの構成例を示す図。
【図2C】プロセス監視制御装置が遠隔配信機構を有する場合の、プロセス監視制御システムの構成例を示す図。
【図3】アドレス設定・サイト位置情報設定部の処理フローを示す図。
【図4】位置情報取得部の処理フローを示す図。
【図5】位置情報判定・自動通報編集部の処理フローを示す図。
【発明を実施するための形態】
【0011】
本発明による自動通報システムは、運転監視操作卓とプロセス監視制御装置と遠隔配信機構を備える。遠隔配信機構は、運転監視操作卓又はプロセス監視制御装置が備えていてもよい。
【0012】
運転監視操作卓は、プロセス監視制御装置から受信したプロセスの事象である警報や指示を蓄積する。
【0013】
遠隔配信機構は、運転員の操作により、自己の地球上の位置情報をサイト位置情報として取得し、運転監視操作卓に事象が蓄積されたことを検出したら、自己の地球上の位置情報を現位置情報として取得し、現位置情報とサイト位置情報との差が予め定めた許容誤差の範囲以内の場合には、運転監視操作卓が蓄積した事象を基にメッセージを作成し、このメッセージを端末機器に送信する。
【0014】
メッセージの送信先のアドレスは、運転員の操作により設定してもよい。また、現位置情報とサイト位置情報との差が許容誤差の範囲外の場合には、警報を運転監視操作卓に出力するのが望ましい。
【0015】
以下、本発明による自動通報システムの実施例を、図面を用いて説明する。図1A乃至図1Cは自動通報システムの機構を、図2A乃至図2Cはプロセス監視制御システムの構成例を示す図である。図3乃至図5は、自動通報システムの主要部分であるアドレス設定・サイト位置情報設定部、位置情報取得部、及び位置情報判定・自動通報編集部の処理フローを示す図である。
【0016】
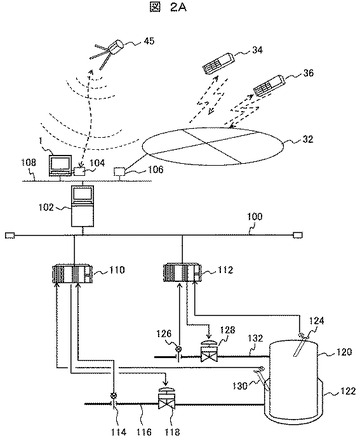
まず、図2Aを用いて、プロセス監視制御システムの構成を説明する。プロセス監視制御システムは、プラントの機器を監視制御するプロセス監視制御装置110、112と、運転監視操作卓102と、遠隔配信機構1を備える。
【0017】
プロセス監視制御装置110は、配管116に設置された流量検出端114と、ジャケット122に設置された温度検出端130とからの信号をモニタリングし、配管116に設置された調節弁118をコントロールする。配管116は、ジャケット122に温水又は冷水を供給するためのものである。
【0018】
プロセス監視制御装置112は、配管132に設置された流量検出端126と、反応缶120に設置された温度検出端124とからの信号をモニタリングし、配管132に設置された調節弁128をコントロールする。配管132は、反応缶120に原料を仕込むためのものである。
【0019】
プロセス監視制御装置110、112は、このように、温度検出端124、130と流量検出端114、126とからの信号をモニタリングし、調節弁118、128をコントロールすることで、反応缶120における化学反応の進行を司り、生成物を得るプロセス制御を行う。
【0020】
プロセス監視制御装置112、110は、通信回線100を介して、運転監視操作卓102に接続されている。従って、流量検出端126によって検出された反応缶120に流れ込む原料の流量や、流量検出端114によって検出されたジャケット122に流れ込む温水又は冷水の流量は、プロセス監視制御装置112、110を介して運転監視操作卓102に取り込まれ、そのディスプレイ上にそれらの流量値が表示される。また、プロセス監視制御装置112、110による調節弁128、118の開度も、通信回線100を介して、運転監視操作卓102のディスプレイ上に表示される。
【0021】
運転監視操作卓102は、入出力部を備える。運転員は、入出力部により、プロセスの運転状態を把握し、所要の運転操作を行うことができる。また、運転員は、入出力部を介して運転監視操作卓102にデータを入力することができる。
【0022】
故に、プロセス監視制御システムの運転員は、運転監視操作卓102のディスプレイの画面をモニターすることにより、反応缶120及びジャケット122への原料や温水又は冷水の流入状況を把握することができる。また、マニュアル操作で調節弁118、128の開度の制御をする場合には、運転監視操作卓102から制御を行える。
【0023】
遠隔配信機構1は、例えばパソコンに構築することができ、上位回線108を介して運転監視操作卓102と接続されている。また、全地球測位システム(GPS)を司るGPS衛星45と情報交信を行うGPS受信部104が取付けられており、遠隔配信機構1が地球上のどの位置に設置されているかを認識することができる。遠隔配信機構1は、運転監視操作卓102を介して入出力操作を行えるようにしてもよく、遠隔配信機構1自体が入出力部を備えており、この入出力部を介して入出力操作を行えるようにしてもよい。
【0024】
最近では、プロセス産業のトータル維持コスト削減要求が日増しに強まり、プラント運転員の人数削減、及び1人当たりの業務範囲拡大の傾向にあり、プラントの業種によっては、夜間等は無人にて操業し、コスト削減したい、という要求が増えてきている。無人とは言っても、緊急事態発生時には運転員による迅速な対応が必要であり、緊急事態の発生を運転員に迅速に通知する必要がある。
【0025】
緊急事態の発生を通知する手段として、ネットワークインフラを活用し、携帯端末等の端末機器にて自動通報、遠隔対応を行いたいというニーズが上昇傾向にある。運転監視操作卓102や遠隔配信機構1からは、上位回線108とネットワーク接続機器106とネットワークインフラ32を介し、端末機器34、36に対してプロセスの各種情報を送信することができる。ネットワークインフラとしては、通信事業会社が運営するものを利用してもよく、自社専用ネットワークを利用してもよい。端末機器としては、携帯電話等の携帯端末を用いるのが一般的であるが、固定式のものを用いてもよく、機器の種類を問わない。
【0026】
次に、図1Aを用いて、自動通報システムの機構を説明する。自動通報システムの主要部分であるアドレス設定・サイト位置情報設定部、位置情報取得部、及び位置情報判定・自動通報編集部は、図1Aと図2Aに示した遠隔配信機構1が備える。
【0027】
図1Aは、運転監視操作卓102、プロセス監視制御装置110、遠隔配信機構1、ネットワークインフラ32、GPS衛星45、及び端末機器34、36との間の情報交信方式を示している。図1Aにおいて、運転監視操作卓102とプロセス監視制御装置110は、それぞれの内部機構10、48を示した。また、端末機器36も内部機構30を示した。なお、図1Aでは、図2Aに示した2つのプロセス監視制御装置110、112のうち、代表してプロセス監視制御装置110のみを示している。
【0028】
プロセス監視制御装置110は、内部機構48として、プロセス56の制御を行うプロセス制御部54、プロセス56の事象を検出する事象検出部52、及び検出した事象を運転監視操作卓102に送信する事象送信部50を有する。プロセス56の事象とは、プラントからの警報や、運転員への指示のことである。
【0029】
運転監視操作卓102は、内部機構10として、事象受付部28、及び事象バッファ26を有する。事象受付部28は、プロセス監視制御装置110から送信された事象を受信する。事象バッファ26は、事象受付部28が受信した事象を蓄積する。
【0030】
遠隔配信機構1は、事象取出し部20、位置情報取得部14、サイト位置情報記憶部16、位置情報判定・自動通報編集部22、アドレス設定・サイト位置情報設定部12、及び自動通報送信部24を有する。また、GPS受信部104が取付けられており、GPS衛星45から位置情報を取得する。
【0031】
事象取出し部20は、運転監視操作卓102の内部機構10の事象バッファ26を監視しており、事象バッファ26に事象が蓄積されたことを検出すると、このことを位置情報判定・自動通報編集部22に通知する。また、事象取出し部20は、位置情報判定・自動通報編集部22の命令により、事象バッファ26から事象を取出す。
【0032】
位置情報取得部14は、GPS受信部104から位置情報を取得する。位置情報とは、遠隔配信機構1の位置を特定する情報であり、例えば緯度と経度についての情報である。
【0033】
サイト位置情報記憶部16は、位置情報取得部14が取得した位置情報を格納する。
【0034】
位置情報判定・自動通報編集部22は、位置情報取得部14から取得した位置情報に基づいて、実稼働サイトに遠隔配信機構1が位置しているか否かを判断し、自動通報メッセージ(運転員に自動通報するメッセージ)を作成する。実稼働サイトとは、プロセス監視制御システムが実際に稼働しているサイトのことであり、一般的には、システムを納入した顧客のサイトである。
【0035】
アドレス設定・サイト位置情報設定部12は、運転員の操作に応じて、自動通報メッセージの送信先である通報先アドレス18(端末機器のネットワークアドレス、例えば携帯電話の電話番号)を設定するか、位置情報取得部14を起動させる。
【0036】
自動通報送信部24は、端末機器34、36に自動通報メッセージを送信する。
【0037】
アドレス設定・サイト位置情報設定部12、位置情報取得部14、及び位置情報判定・自動通報編集部22については、図3乃至図5を用いて後述する。
【0038】
端末機器34、36は、内部機構30として、自動通報メッセージを受信する受信部38、受信した自動通報メッセージが格納される通報情報バッファ41、自動通報メッセージが表示される表示部42、及び自動通報メッセージの格納と表示を実行する格納部40を有する。
【0039】
プロセス監視制御装置110では、事象検出部52がプロセス56の事象(例えば、「ジャケット温度が規定値を超えた」という警報)を検出すると、検出した事象を事象送信部50が通信回線を経由して運転監視操作卓102に送信する。
【0040】
運転監視操作卓102では、プロセス監視制御装置110から送信されてきた事象を、事象受付部28が受信し、事象バッファ26で一旦蓄積する。
【0041】
遠隔配信機構1の位置情報取得部14は、アドレス設定・サイト位置情報設定部12の指令に従い、GPS受信部104から、プロセス監視制御システムが実稼働サイトに設置されたときの遠隔配信機構1の位置情報を取得する。サイト位置情報記憶部16は、位置情報取得部14が取得したこの位置情報を、サイト位置情報として記憶する。
【0042】
実稼働サイトへシステムを納入し設置した後、バックアップ等のためにプロセス監視制御システムのソフトウェアを外部媒体に複写する場合は、サイト位置情報も複写する。これは、試験用のサイト等、実稼働サイト以外のサイトで、本システムを起動したときに、本自動通報システムを有効に機能させるためである。
【0043】
位置情報判定・自動通報編集部22は、運転監視操作卓102の事象バッファ26に事象が蓄積されたことを、遠隔配信機構1の事象取出し部20から通知されると、位置情報取得部14を起動させて、現時点(位置情報取得部14を起動させた時点)での遠隔配信機構1の位置情報を、現位置情報として取得する。そして、サイト位置情報記憶部16からサイト位置情報を取出し、サイト位置情報と現位置情報とを比較してこれらの差を求め、この差が予め定めた許容誤差の範囲以内か範囲外かの判定を行う。
【0044】
サイト位置情報と現位置情報との差が予め定めた許容誤差の範囲以内の場合には、現在、遠隔配信機構1は実稼働サイト内にあり、実稼働サイトでの運転に使用されているものと判断する。そして、事象取出し部20に事象の取出しを命令する。
【0045】
事象取出し部20は、事象バッファ26に蓄積されている事象を、事象バッファ26の先頭から順に取出す。
【0046】
次に、位置情報判定・自動通報編集部22は、運転員に通知する自動通報メッセージを作成する。自動通報メッセージは、プロセスに生じた異常を運転員に自動的に通報するためのメッセージであり、事象取出し部20が取出した事象(プラントからの警報や運転員への指示)を基にして、音声、文字列若しくは画像又はこれらの組み合わせによって構成したものであり、端末機器に送信される。また、アドレス設定・サイト位置情報設定部12が設定した通報先アドレス18から、送信すべき端末機器のネットワークアドレス(例えば、携帯電話の電話番号)を自動通報メッセージに付け加える。このとき、1つ又は複数の端末機器のネットワークアドレスを付け加えることができる。
【0047】
自動通報送信部24は、位置情報判定・自動通報編集部22が作成した自動通報メッセージを、ネットワークインフラ32を経由し、端末機器34、36に送信する。
【0048】
端末機器では、受信部38が、遠隔配信機構1から送信された自動通報メッセージを受信する。格納部40は、受信部38が受信した自動通報メッセージを、通報情報バッファ41に順次格納し、表示部42にて順次表示する。
【0049】
事象バッファ26に蓄積されている事象の取出しから端末機器での自動通報メッセージの表示までの処理は、事象バッファ26に蓄積されている事象が空になるまで、事象の1件毎に順次繰り返される。
【0050】
また、サイト位置情報と現位置情報との差が予め定めた許容誤差の範囲以内か範囲外かの判定において、この差が予め定めた許容誤差の範囲外の場合には、位置情報判定・自動通報編集部22は、現在の自動通報送信に関する一連の処理が、実稼働サイト内で使用されている遠隔配信機構1とは異なる遠隔配信機構で実行されているものと判断する。すなわち、この一連の処理が、実稼働サイトではなく、再現試験や確認試験を行う試験用のサイトで行われていると判断する。この場合は、自動通報メッセージを作成しない。そして、現位置情報がサイト位置情報と異なっており自動通報メッセージを作成しなかった旨を通知する警報を、運転監視操作卓102に出力する。
【0051】
遠隔配信機構1は、運転監視操作卓102が有していてもよく、プロセス監視制御装置110又はプロセス監視制御装置112が有していてもよい。いずれの場合も、遠隔配信機構1、運転監視操作卓102、及びプロセス監視制御装置110、112の動作は、上述したものと同様である。
【0052】
図1Bは、運転監視操作卓102が遠隔配信機構1を有する場合の、自動通報システムの機構を示す図である。図2Bは、運転監視操作卓102が遠隔配信機構1を有する場合の、プロセス監視制御システムの構成例を示す図である。運転監視操作卓102は、図1Bに示すように遠隔配信機構1を有しており、図2Bに示すようにGPS受信部104が取付けられている。遠隔配信機構1は、GPS受信部104を介してGPS衛星45から位置情報を取得することができる。この場合、運転監視操作卓102を介して遠隔配信機構1の入出力操作を行うものとする。
【0053】
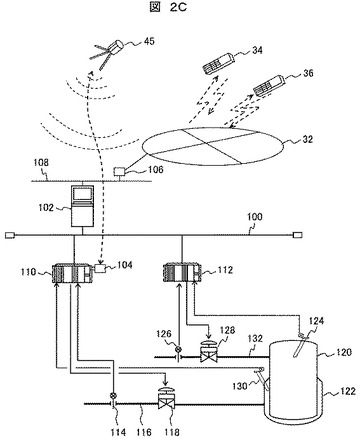
図1Cは、プロセス監視制御装置110が遠隔配信機構1を有する場合の、自動通報システムの機構を示す図である。図2Cは、プロセス監視制御装置110が遠隔配信機構1を有する場合の、プロセス監視制御システムの構成例を示す図である。プロセス監視制御装置110は、図1Cに示すように遠隔配信機構1を有しており、図2Cに示すようにGPS受信部104が取付けられている。遠隔配信機構1は、GPS受信部104を介してGPS衛星45から位置情報を取得することができる。遠隔配信機構1の入出力操作は、運転監視操作卓102を介して行ってもよく、遠隔配信機構1が入出力部を備える場合はこの入出力部を介して行ってもよい。なお、遠隔配信機構1は、プロセス監視制御装置112に含まれていてもよい。この場合は、プロセス監視制御装置112にGPS受信部104が取付けられる。
【0054】
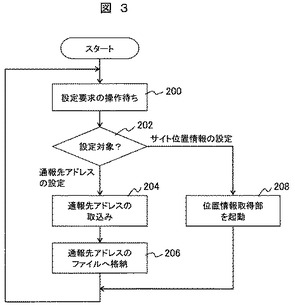
図3は、遠隔配信機構1のアドレス設定・サイト位置情報設定部12の処理フローを示す図である。本処理は、プロセス監視制御システムが実稼働サイトに設置されたとき、すなわち、自動通報システムを実稼働サイトへ搬入した後、運転監視操作卓102が確実に据付けられた時点で、運転員の操作に基づいて行われる。本処理では、自動通報の通報先アドレス(端末機器のネットワークアドレス、例えば携帯電話の電話番号)の登録、及びサイト位置情報(運転監視操作卓102の操業運転時の位置情報)の取得と記憶を行う。
【0055】
まず、ブロック200で、運転員の設定要求の操作待ちを行う。運転員は、遠隔配信機構1又は運転監視操作卓102の入出力部を操作して、設定対象(自動通報の通報先アドレス、又はサイト位置情報)を指定する。
【0056】
運転員の操作があれば、ブロック202で、運転員の操作に応じて、設定対象が何であるか、すなわち、自動通報の通報先アドレスを設定するか、サイト位置情報を設定するかを判定する。
【0057】
通報先アドレスの設定の場合は、ブロック204で、運転員が入力した自動通報の通報先アドレス(端末機器のネットワークアドレス、例えば携帯電話の電話番号)を取り込む。運転員は、遠隔配信機構1又は運転監視操作卓102の入出力部を操作して、通報先アドレスを入力する。具体的な入力方法は、例えば、キーボードを使ってもよいし、赤外線通信のような外部通信を用いて入力してもよい。
【0058】
続いて、ブロック206にて、取り込んだ通報先アドレスを、通報先アドレス18のファイルに格納し、通報先アドレス18を設定する。
【0059】
また、ブロック202でサイト位置情報の設定の場合は、ブロック208にて、位置情報取得部14を起動し、サイト位置情報を設定する。
【0060】
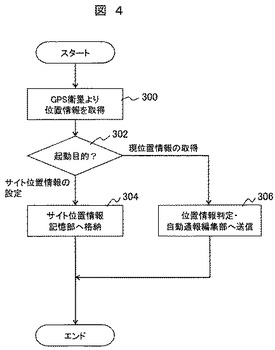
図4は、遠隔配信機構1の位置情報取得部14の処理フローを示す図である。位置情報取得部14は、アドレス設定・サイト位置情報設定部12又は位置情報判定・自動通報編集部22によって起動されて、本処理を実行する。
【0061】
まず、ブロック300で、GPS受信部104を介してGPS衛星45より位置情報を取得する。
【0062】
続いて、ブロック302にて、位置情報取得部14の起動目的、すなわち、位置情報取得部14が、サイト位置情報を設定する目的で起動されたのか(図3のブロック208)、現位置情報を取得する目的で起動されたのか(後述する図5のブロック400)を判断する。位置情報取得部14が、アドレス設定・サイト位置情報設定部12によって起動された場合は、サイト位置情報の設定を目的とするものと判断し、位置情報判定・自動通報編集部22によって起動された場合は、現位置情報の取得を目的とするものと判断する。
【0063】
位置情報取得部14がサイト位置情報の設定目的で起動された場合は、ブロック304にて、ブロック300で取得した位置情報をサイト位置情報としてサイト位置情報記憶部16に格納する。
【0064】
また、位置情報取得部14が現位置情報の取得目的で起動された場合は、ブロック306にて、ブロック300で取得した位置情報を現位置情報として位置情報判定・自動通報編集部22へ送信する。
【0065】
図5は、遠隔配信機構1の位置情報判定・自動通報編集部22の処理フローを示す図である。遠隔配信機構1の事象取出し部20は、運転監視操作卓102の事象バッファ26に事象が蓄積されたことを検出すると、この旨を位置情報判定・自動通報編集部22に通知する。位置情報判定・自動通報編集部22は、この通知を受信すると、図5に示した処理を実行する。
【0066】
まず、ブロック400にて、位置情報取得部14を起動させて、現時点(位置情報取得部14が起動した時点)での遠隔配信機構1の位置情報を、現位置情報として得る。位置情報取得部14は、図4のブロック300、302、及び306の処理を行い、現位置情報を取得して位置情報判定・自動通報編集部22へ送信する。
【0067】
ブロック401で、現位置情報を正常に受信できたか判定する。現位置情報を正常に受信できた場合は、ブロック402で、受信した現位置情報を記憶する。現位置情報を正常に受信できなかった場合は、ブロック416に進み、現位置情報を受信できず自動通報メッセージを作成しなかった旨を通知する警報を、運転監視操作卓102に出力する。現位置情報を正常に受信できなかった場合の例には、本処理が再現試験や確認試験を行う試験用のサイトで行われており、遠隔配信機構1にGPS受信部104が取り付けられていなかった場合などがある。
【0068】
続いて、ブロック404にて、サイト位置情報記憶部16からサイト位置情報を取出す。サイト位置情報記憶部16には、図4のブロック300、302、及び304の処理により、サイト位置情報が格納されている。
【0069】
ブロック406で、現位置情報とサイト位置情報とを比較してこれらの差を求め、この差が予め定めた許容誤差の範囲以内か範囲外かを判定する。位置情報が緯度と経度で表される場合は、現位置情報とサイト位置情報の差は、これらの緯度の差と経度の差として求める。
【0070】
現位置情報とサイト位置情報の差が予め定めた許容誤差の範囲以内の場合には、ブロック408にて、事象取出し部20に事象の取出しを命令する。事象取出し部20は、事象バッファ26に蓄積されている事象を、事象バッファ26の先頭から順に取出す。
【0071】
その後、ブロック410にて、事象取出し部20が取出した事象を基にして、自動通報メッセージを作成する。自動通報メッセージは、音声、文字列若しくは画像又はこれらの組み合わせから構成される。また、自動通報メッセージには、アドレス設定・サイト位置情報設定部12が設定した通報先アドレス18(図3のブロック206参照)を付け加える。これにより、自動通報メッセージの通報先(端末機器のネットワークアドレス、例えば携帯電話の電話番号)を特定する。自動通報メッセージには、1つ又は複数の通報先アドレス18を付け加えることができる。
【0072】
ブロック412にて、ブロック410で作成した自動通報メッセージを、自動通報送信部24へ送信する。自動通報送信部24は、端末機器34、36に自動通報メッセージを送信する。
【0073】
続くブロック414で、事象バッファ26に蓄積されている全ての事象について処理が終了したかどうか判定する。事象バッファ26が空になっている場合は、全ての事象について処理が終了したと判定する。全ての事象について処理が終了していない場合、すなわち事象バッファ26が空でない場合は、空になるまでブロック408〜ブロック414の処理を繰り返す。
【0074】
ブロック406の判定で、サイト位置情報と現位置情報との差が予め定めた許容誤差の範囲外の場合には、ブロック416にて、現位置情報がサイト位置情報と異なっており自動通報メッセージを作成しなかった旨を通知する警報を、運転監視操作卓102に出力する。
【0075】
本発明による自動通報システムは、プロセス監視制御システムに用いられ、実稼働サイト(例えば、納入された顧客サイト)にてプロセス監視制御システムが稼動している場合のみに自動通報を発報する。従って、顧客及びメーカのセキュリティ及び信頼性を向上できるという効果がある。
【符号の説明】
【0076】
1…遠隔配信機構、10…運転監視操作卓の内部機構、12…アドレス設定・サイト位置情報設定部、14…位置情報取得部、16…サイト位置情報記憶部、18…通報先アドレス、20…事象取出し部、22…位置情報判定・自動通報編集部、24…自動通報送信部、26…事象バッファ、28…事象受付部、30…端末機器の内部機構、32…ネットワークインフラ、34、36…端末機器、38…受信部、40…格納部、41…通報情報バッファ、42…表示部、45…GPS衛星、48…プロセス監視制御装置の内部機構、50…事象送信部、52…事象検出部、54…プロセス制御部、56…プロセス、100…通信回線、102…運転監視操作卓、104…GPS受信部、106…ネットワーク接続機器、108…上位回線、110、112…プロセス監視制御装置、114、126…流量検出端、116、132…配管、118、128…調節弁、120…反応缶、122…ジャケット、124、130…温度検出端。
【技術分野】
【0001】
本発明は、プロセスの監視と制御を行うプロセス監視制御システムにおける自動通報システムに関し、特に、広域運用のプロセス監視制御システムにおける自動通報システムに関する。
【背景技術】
【0002】
昨今、設備の監視制御装置と携帯電話等の情報端末を結び付けた自動通報システムの運用が、プロセス産業の分野でも広く実施されている。自動通報システムを有する監視制御システムの例は、特許文献1に開示されている。自動通報システムを有するプロセス監視制御システムでは、プロセスの運転員は、計器室内にて画面上でプロセスの運転状態を把握し、所要の運転操作を行う。また、運転員がいつどこにいても緊急対応できるように、携帯電話等の情報端末を用いる自動通報システムを有することが一般的になっている。自動通報システムは、プロセスに何らかの異常が生じたら、ネットワークを介して運転員に自動的に通報するシステムである。この自動通報システムにより、運転員が計器室から遠隔の場所にいても、プロセスの異常を自動通報することが可能である。
【0003】
プロセス監視制御システムのメーカは、顧客にシステムを納入した後、不測事態等に備えてのバックアップのため、このような自動通報システムを有するプロセス監視制御システムのソフトウェア全体をそっくり外部媒体に複写し、自社へ持ち帰って保管しておくのが通例である。メーカは、場合によっては、複写したソフトウェアを自社の試験用のシステムにインストールして、再現試験や確認試験等を行うことがある。この際に、自動通報の機能が組込まれているということを失念していると、思いもよらずプロセス異常等の通報が発報され、顧客のプロセス監視制御システムの運転員の携帯電話等にまで届いてしまう場合がある。すなわち、実際には発生していないプロセスの異常等を、顧客サイトのプロセス監視制御システムの運転員に通報してしまい、顧客に迷惑をかける場合がある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2003−186531号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
従来の自動通報システムでは、上述したように、メーカが自社の試験用のシステムで行う再現試験や確認試験等で発生させたプロセス異常(実際には発生していないプロセス異常)を、顧客サイト等の、システムが実稼働しているサイト(実稼働サイト)のプロセス監視制御システムの運転員に自動的に通報してしまう可能性を有する。そこで、実稼働サイト以外で発生したプロセスの異常を、実稼働サイトのプロセス監視制御システムの運転員に通報しないようにすることが望まれている。
【0006】
本発明の目的は、プロセス監視制御システムにおいて、プロセスの異常をネットワークを介して運転員に自動通報する機能を、システムが納入された実稼働サイトのみにおいて有効とすることが可能な自動通報システムを提供することである。
【課題を解決するための手段】
【0007】
本発明による自動通報システムは、次のような特徴を有する。
【0008】
運転監視操作卓とプロセス監視制御装置と遠隔配信機構を備え、前記運転監視操作卓は、前記プロセス監視制御装置から受信したプロセスの事象である警報や指示を蓄積し、前記遠隔配信機構は、前記運転監視操作卓が蓄積した前記事象を基に作成したメッセージを端末機器に送信する送信部を備える。前記遠隔配信機構は、前記運転監視操作卓に前記事象が蓄積されたことを検出し、前記運転監視操作卓から前記事象を取出す事象取出し部と、自己の地球上の位置情報を取得する位置情報取得部と、運転員の操作により、前記位置情報をサイト位置情報として取得するために前記位置情報取得部を起動させるアドレス設定・サイト位置情報設定部と、前記事象取出し部が前記運転監視操作卓に前記事象が蓄積されたことを検出したら、前記位置情報取得部を起動させて前記位置情報を現位置情報として取得し、前記現位置情報と前記サイト位置情報との差が予め定めた許容誤差の範囲以内かどうかを判定する位置情報判定部とを備え、前記差が前記許容誤差の範囲以内の場合には、前記送信部が前記メッセージを前記端末機器に送信する。
【発明の効果】
【0009】
本発明による自動通報システムは、プロセス監視制御システムにおいて、プロセスの異常を運転員に自動通報する機能を、システムが納入された実稼働サイトのみにおいて有効とすることが可能である。このため、実稼働サイト以外に設置された自動通報システムからは、プロセスの異常が実稼働サイトの運転員に自動通報されず、顧客及びメーカのセキュリティ及び信頼性を向上することができる。
【図面の簡単な説明】
【0010】
【図1A】自動通報システムの機構を示す図。
【図1B】運転監視操作卓が遠隔配信機構を有する場合の、自動通報システムの機構を示す図。
【図1C】プロセス監視制御装置が遠隔配信機構を有する場合の、自動通報システムの機構を示す図。
【図2A】プロセス監視制御システムの構成例を示す図。
【図2B】運転監視操作卓が遠隔配信機構を有する場合の、プロセス監視制御システムの構成例を示す図。
【図2C】プロセス監視制御装置が遠隔配信機構を有する場合の、プロセス監視制御システムの構成例を示す図。
【図3】アドレス設定・サイト位置情報設定部の処理フローを示す図。
【図4】位置情報取得部の処理フローを示す図。
【図5】位置情報判定・自動通報編集部の処理フローを示す図。
【発明を実施するための形態】
【0011】
本発明による自動通報システムは、運転監視操作卓とプロセス監視制御装置と遠隔配信機構を備える。遠隔配信機構は、運転監視操作卓又はプロセス監視制御装置が備えていてもよい。
【0012】
運転監視操作卓は、プロセス監視制御装置から受信したプロセスの事象である警報や指示を蓄積する。
【0013】
遠隔配信機構は、運転員の操作により、自己の地球上の位置情報をサイト位置情報として取得し、運転監視操作卓に事象が蓄積されたことを検出したら、自己の地球上の位置情報を現位置情報として取得し、現位置情報とサイト位置情報との差が予め定めた許容誤差の範囲以内の場合には、運転監視操作卓が蓄積した事象を基にメッセージを作成し、このメッセージを端末機器に送信する。
【0014】
メッセージの送信先のアドレスは、運転員の操作により設定してもよい。また、現位置情報とサイト位置情報との差が許容誤差の範囲外の場合には、警報を運転監視操作卓に出力するのが望ましい。
【0015】
以下、本発明による自動通報システムの実施例を、図面を用いて説明する。図1A乃至図1Cは自動通報システムの機構を、図2A乃至図2Cはプロセス監視制御システムの構成例を示す図である。図3乃至図5は、自動通報システムの主要部分であるアドレス設定・サイト位置情報設定部、位置情報取得部、及び位置情報判定・自動通報編集部の処理フローを示す図である。
【0016】
まず、図2Aを用いて、プロセス監視制御システムの構成を説明する。プロセス監視制御システムは、プラントの機器を監視制御するプロセス監視制御装置110、112と、運転監視操作卓102と、遠隔配信機構1を備える。
【0017】
プロセス監視制御装置110は、配管116に設置された流量検出端114と、ジャケット122に設置された温度検出端130とからの信号をモニタリングし、配管116に設置された調節弁118をコントロールする。配管116は、ジャケット122に温水又は冷水を供給するためのものである。
【0018】
プロセス監視制御装置112は、配管132に設置された流量検出端126と、反応缶120に設置された温度検出端124とからの信号をモニタリングし、配管132に設置された調節弁128をコントロールする。配管132は、反応缶120に原料を仕込むためのものである。
【0019】
プロセス監視制御装置110、112は、このように、温度検出端124、130と流量検出端114、126とからの信号をモニタリングし、調節弁118、128をコントロールすることで、反応缶120における化学反応の進行を司り、生成物を得るプロセス制御を行う。
【0020】
プロセス監視制御装置112、110は、通信回線100を介して、運転監視操作卓102に接続されている。従って、流量検出端126によって検出された反応缶120に流れ込む原料の流量や、流量検出端114によって検出されたジャケット122に流れ込む温水又は冷水の流量は、プロセス監視制御装置112、110を介して運転監視操作卓102に取り込まれ、そのディスプレイ上にそれらの流量値が表示される。また、プロセス監視制御装置112、110による調節弁128、118の開度も、通信回線100を介して、運転監視操作卓102のディスプレイ上に表示される。
【0021】
運転監視操作卓102は、入出力部を備える。運転員は、入出力部により、プロセスの運転状態を把握し、所要の運転操作を行うことができる。また、運転員は、入出力部を介して運転監視操作卓102にデータを入力することができる。
【0022】
故に、プロセス監視制御システムの運転員は、運転監視操作卓102のディスプレイの画面をモニターすることにより、反応缶120及びジャケット122への原料や温水又は冷水の流入状況を把握することができる。また、マニュアル操作で調節弁118、128の開度の制御をする場合には、運転監視操作卓102から制御を行える。
【0023】
遠隔配信機構1は、例えばパソコンに構築することができ、上位回線108を介して運転監視操作卓102と接続されている。また、全地球測位システム(GPS)を司るGPS衛星45と情報交信を行うGPS受信部104が取付けられており、遠隔配信機構1が地球上のどの位置に設置されているかを認識することができる。遠隔配信機構1は、運転監視操作卓102を介して入出力操作を行えるようにしてもよく、遠隔配信機構1自体が入出力部を備えており、この入出力部を介して入出力操作を行えるようにしてもよい。
【0024】
最近では、プロセス産業のトータル維持コスト削減要求が日増しに強まり、プラント運転員の人数削減、及び1人当たりの業務範囲拡大の傾向にあり、プラントの業種によっては、夜間等は無人にて操業し、コスト削減したい、という要求が増えてきている。無人とは言っても、緊急事態発生時には運転員による迅速な対応が必要であり、緊急事態の発生を運転員に迅速に通知する必要がある。
【0025】
緊急事態の発生を通知する手段として、ネットワークインフラを活用し、携帯端末等の端末機器にて自動通報、遠隔対応を行いたいというニーズが上昇傾向にある。運転監視操作卓102や遠隔配信機構1からは、上位回線108とネットワーク接続機器106とネットワークインフラ32を介し、端末機器34、36に対してプロセスの各種情報を送信することができる。ネットワークインフラとしては、通信事業会社が運営するものを利用してもよく、自社専用ネットワークを利用してもよい。端末機器としては、携帯電話等の携帯端末を用いるのが一般的であるが、固定式のものを用いてもよく、機器の種類を問わない。
【0026】
次に、図1Aを用いて、自動通報システムの機構を説明する。自動通報システムの主要部分であるアドレス設定・サイト位置情報設定部、位置情報取得部、及び位置情報判定・自動通報編集部は、図1Aと図2Aに示した遠隔配信機構1が備える。
【0027】
図1Aは、運転監視操作卓102、プロセス監視制御装置110、遠隔配信機構1、ネットワークインフラ32、GPS衛星45、及び端末機器34、36との間の情報交信方式を示している。図1Aにおいて、運転監視操作卓102とプロセス監視制御装置110は、それぞれの内部機構10、48を示した。また、端末機器36も内部機構30を示した。なお、図1Aでは、図2Aに示した2つのプロセス監視制御装置110、112のうち、代表してプロセス監視制御装置110のみを示している。
【0028】
プロセス監視制御装置110は、内部機構48として、プロセス56の制御を行うプロセス制御部54、プロセス56の事象を検出する事象検出部52、及び検出した事象を運転監視操作卓102に送信する事象送信部50を有する。プロセス56の事象とは、プラントからの警報や、運転員への指示のことである。
【0029】
運転監視操作卓102は、内部機構10として、事象受付部28、及び事象バッファ26を有する。事象受付部28は、プロセス監視制御装置110から送信された事象を受信する。事象バッファ26は、事象受付部28が受信した事象を蓄積する。
【0030】
遠隔配信機構1は、事象取出し部20、位置情報取得部14、サイト位置情報記憶部16、位置情報判定・自動通報編集部22、アドレス設定・サイト位置情報設定部12、及び自動通報送信部24を有する。また、GPS受信部104が取付けられており、GPS衛星45から位置情報を取得する。
【0031】
事象取出し部20は、運転監視操作卓102の内部機構10の事象バッファ26を監視しており、事象バッファ26に事象が蓄積されたことを検出すると、このことを位置情報判定・自動通報編集部22に通知する。また、事象取出し部20は、位置情報判定・自動通報編集部22の命令により、事象バッファ26から事象を取出す。
【0032】
位置情報取得部14は、GPS受信部104から位置情報を取得する。位置情報とは、遠隔配信機構1の位置を特定する情報であり、例えば緯度と経度についての情報である。
【0033】
サイト位置情報記憶部16は、位置情報取得部14が取得した位置情報を格納する。
【0034】
位置情報判定・自動通報編集部22は、位置情報取得部14から取得した位置情報に基づいて、実稼働サイトに遠隔配信機構1が位置しているか否かを判断し、自動通報メッセージ(運転員に自動通報するメッセージ)を作成する。実稼働サイトとは、プロセス監視制御システムが実際に稼働しているサイトのことであり、一般的には、システムを納入した顧客のサイトである。
【0035】
アドレス設定・サイト位置情報設定部12は、運転員の操作に応じて、自動通報メッセージの送信先である通報先アドレス18(端末機器のネットワークアドレス、例えば携帯電話の電話番号)を設定するか、位置情報取得部14を起動させる。
【0036】
自動通報送信部24は、端末機器34、36に自動通報メッセージを送信する。
【0037】
アドレス設定・サイト位置情報設定部12、位置情報取得部14、及び位置情報判定・自動通報編集部22については、図3乃至図5を用いて後述する。
【0038】
端末機器34、36は、内部機構30として、自動通報メッセージを受信する受信部38、受信した自動通報メッセージが格納される通報情報バッファ41、自動通報メッセージが表示される表示部42、及び自動通報メッセージの格納と表示を実行する格納部40を有する。
【0039】
プロセス監視制御装置110では、事象検出部52がプロセス56の事象(例えば、「ジャケット温度が規定値を超えた」という警報)を検出すると、検出した事象を事象送信部50が通信回線を経由して運転監視操作卓102に送信する。
【0040】
運転監視操作卓102では、プロセス監視制御装置110から送信されてきた事象を、事象受付部28が受信し、事象バッファ26で一旦蓄積する。
【0041】
遠隔配信機構1の位置情報取得部14は、アドレス設定・サイト位置情報設定部12の指令に従い、GPS受信部104から、プロセス監視制御システムが実稼働サイトに設置されたときの遠隔配信機構1の位置情報を取得する。サイト位置情報記憶部16は、位置情報取得部14が取得したこの位置情報を、サイト位置情報として記憶する。
【0042】
実稼働サイトへシステムを納入し設置した後、バックアップ等のためにプロセス監視制御システムのソフトウェアを外部媒体に複写する場合は、サイト位置情報も複写する。これは、試験用のサイト等、実稼働サイト以外のサイトで、本システムを起動したときに、本自動通報システムを有効に機能させるためである。
【0043】
位置情報判定・自動通報編集部22は、運転監視操作卓102の事象バッファ26に事象が蓄積されたことを、遠隔配信機構1の事象取出し部20から通知されると、位置情報取得部14を起動させて、現時点(位置情報取得部14を起動させた時点)での遠隔配信機構1の位置情報を、現位置情報として取得する。そして、サイト位置情報記憶部16からサイト位置情報を取出し、サイト位置情報と現位置情報とを比較してこれらの差を求め、この差が予め定めた許容誤差の範囲以内か範囲外かの判定を行う。
【0044】
サイト位置情報と現位置情報との差が予め定めた許容誤差の範囲以内の場合には、現在、遠隔配信機構1は実稼働サイト内にあり、実稼働サイトでの運転に使用されているものと判断する。そして、事象取出し部20に事象の取出しを命令する。
【0045】
事象取出し部20は、事象バッファ26に蓄積されている事象を、事象バッファ26の先頭から順に取出す。
【0046】
次に、位置情報判定・自動通報編集部22は、運転員に通知する自動通報メッセージを作成する。自動通報メッセージは、プロセスに生じた異常を運転員に自動的に通報するためのメッセージであり、事象取出し部20が取出した事象(プラントからの警報や運転員への指示)を基にして、音声、文字列若しくは画像又はこれらの組み合わせによって構成したものであり、端末機器に送信される。また、アドレス設定・サイト位置情報設定部12が設定した通報先アドレス18から、送信すべき端末機器のネットワークアドレス(例えば、携帯電話の電話番号)を自動通報メッセージに付け加える。このとき、1つ又は複数の端末機器のネットワークアドレスを付け加えることができる。
【0047】
自動通報送信部24は、位置情報判定・自動通報編集部22が作成した自動通報メッセージを、ネットワークインフラ32を経由し、端末機器34、36に送信する。
【0048】
端末機器では、受信部38が、遠隔配信機構1から送信された自動通報メッセージを受信する。格納部40は、受信部38が受信した自動通報メッセージを、通報情報バッファ41に順次格納し、表示部42にて順次表示する。
【0049】
事象バッファ26に蓄積されている事象の取出しから端末機器での自動通報メッセージの表示までの処理は、事象バッファ26に蓄積されている事象が空になるまで、事象の1件毎に順次繰り返される。
【0050】
また、サイト位置情報と現位置情報との差が予め定めた許容誤差の範囲以内か範囲外かの判定において、この差が予め定めた許容誤差の範囲外の場合には、位置情報判定・自動通報編集部22は、現在の自動通報送信に関する一連の処理が、実稼働サイト内で使用されている遠隔配信機構1とは異なる遠隔配信機構で実行されているものと判断する。すなわち、この一連の処理が、実稼働サイトではなく、再現試験や確認試験を行う試験用のサイトで行われていると判断する。この場合は、自動通報メッセージを作成しない。そして、現位置情報がサイト位置情報と異なっており自動通報メッセージを作成しなかった旨を通知する警報を、運転監視操作卓102に出力する。
【0051】
遠隔配信機構1は、運転監視操作卓102が有していてもよく、プロセス監視制御装置110又はプロセス監視制御装置112が有していてもよい。いずれの場合も、遠隔配信機構1、運転監視操作卓102、及びプロセス監視制御装置110、112の動作は、上述したものと同様である。
【0052】
図1Bは、運転監視操作卓102が遠隔配信機構1を有する場合の、自動通報システムの機構を示す図である。図2Bは、運転監視操作卓102が遠隔配信機構1を有する場合の、プロセス監視制御システムの構成例を示す図である。運転監視操作卓102は、図1Bに示すように遠隔配信機構1を有しており、図2Bに示すようにGPS受信部104が取付けられている。遠隔配信機構1は、GPS受信部104を介してGPS衛星45から位置情報を取得することができる。この場合、運転監視操作卓102を介して遠隔配信機構1の入出力操作を行うものとする。
【0053】
図1Cは、プロセス監視制御装置110が遠隔配信機構1を有する場合の、自動通報システムの機構を示す図である。図2Cは、プロセス監視制御装置110が遠隔配信機構1を有する場合の、プロセス監視制御システムの構成例を示す図である。プロセス監視制御装置110は、図1Cに示すように遠隔配信機構1を有しており、図2Cに示すようにGPS受信部104が取付けられている。遠隔配信機構1は、GPS受信部104を介してGPS衛星45から位置情報を取得することができる。遠隔配信機構1の入出力操作は、運転監視操作卓102を介して行ってもよく、遠隔配信機構1が入出力部を備える場合はこの入出力部を介して行ってもよい。なお、遠隔配信機構1は、プロセス監視制御装置112に含まれていてもよい。この場合は、プロセス監視制御装置112にGPS受信部104が取付けられる。
【0054】
図3は、遠隔配信機構1のアドレス設定・サイト位置情報設定部12の処理フローを示す図である。本処理は、プロセス監視制御システムが実稼働サイトに設置されたとき、すなわち、自動通報システムを実稼働サイトへ搬入した後、運転監視操作卓102が確実に据付けられた時点で、運転員の操作に基づいて行われる。本処理では、自動通報の通報先アドレス(端末機器のネットワークアドレス、例えば携帯電話の電話番号)の登録、及びサイト位置情報(運転監視操作卓102の操業運転時の位置情報)の取得と記憶を行う。
【0055】
まず、ブロック200で、運転員の設定要求の操作待ちを行う。運転員は、遠隔配信機構1又は運転監視操作卓102の入出力部を操作して、設定対象(自動通報の通報先アドレス、又はサイト位置情報)を指定する。
【0056】
運転員の操作があれば、ブロック202で、運転員の操作に応じて、設定対象が何であるか、すなわち、自動通報の通報先アドレスを設定するか、サイト位置情報を設定するかを判定する。
【0057】
通報先アドレスの設定の場合は、ブロック204で、運転員が入力した自動通報の通報先アドレス(端末機器のネットワークアドレス、例えば携帯電話の電話番号)を取り込む。運転員は、遠隔配信機構1又は運転監視操作卓102の入出力部を操作して、通報先アドレスを入力する。具体的な入力方法は、例えば、キーボードを使ってもよいし、赤外線通信のような外部通信を用いて入力してもよい。
【0058】
続いて、ブロック206にて、取り込んだ通報先アドレスを、通報先アドレス18のファイルに格納し、通報先アドレス18を設定する。
【0059】
また、ブロック202でサイト位置情報の設定の場合は、ブロック208にて、位置情報取得部14を起動し、サイト位置情報を設定する。
【0060】
図4は、遠隔配信機構1の位置情報取得部14の処理フローを示す図である。位置情報取得部14は、アドレス設定・サイト位置情報設定部12又は位置情報判定・自動通報編集部22によって起動されて、本処理を実行する。
【0061】
まず、ブロック300で、GPS受信部104を介してGPS衛星45より位置情報を取得する。
【0062】
続いて、ブロック302にて、位置情報取得部14の起動目的、すなわち、位置情報取得部14が、サイト位置情報を設定する目的で起動されたのか(図3のブロック208)、現位置情報を取得する目的で起動されたのか(後述する図5のブロック400)を判断する。位置情報取得部14が、アドレス設定・サイト位置情報設定部12によって起動された場合は、サイト位置情報の設定を目的とするものと判断し、位置情報判定・自動通報編集部22によって起動された場合は、現位置情報の取得を目的とするものと判断する。
【0063】
位置情報取得部14がサイト位置情報の設定目的で起動された場合は、ブロック304にて、ブロック300で取得した位置情報をサイト位置情報としてサイト位置情報記憶部16に格納する。
【0064】
また、位置情報取得部14が現位置情報の取得目的で起動された場合は、ブロック306にて、ブロック300で取得した位置情報を現位置情報として位置情報判定・自動通報編集部22へ送信する。
【0065】
図5は、遠隔配信機構1の位置情報判定・自動通報編集部22の処理フローを示す図である。遠隔配信機構1の事象取出し部20は、運転監視操作卓102の事象バッファ26に事象が蓄積されたことを検出すると、この旨を位置情報判定・自動通報編集部22に通知する。位置情報判定・自動通報編集部22は、この通知を受信すると、図5に示した処理を実行する。
【0066】
まず、ブロック400にて、位置情報取得部14を起動させて、現時点(位置情報取得部14が起動した時点)での遠隔配信機構1の位置情報を、現位置情報として得る。位置情報取得部14は、図4のブロック300、302、及び306の処理を行い、現位置情報を取得して位置情報判定・自動通報編集部22へ送信する。
【0067】
ブロック401で、現位置情報を正常に受信できたか判定する。現位置情報を正常に受信できた場合は、ブロック402で、受信した現位置情報を記憶する。現位置情報を正常に受信できなかった場合は、ブロック416に進み、現位置情報を受信できず自動通報メッセージを作成しなかった旨を通知する警報を、運転監視操作卓102に出力する。現位置情報を正常に受信できなかった場合の例には、本処理が再現試験や確認試験を行う試験用のサイトで行われており、遠隔配信機構1にGPS受信部104が取り付けられていなかった場合などがある。
【0068】
続いて、ブロック404にて、サイト位置情報記憶部16からサイト位置情報を取出す。サイト位置情報記憶部16には、図4のブロック300、302、及び304の処理により、サイト位置情報が格納されている。
【0069】
ブロック406で、現位置情報とサイト位置情報とを比較してこれらの差を求め、この差が予め定めた許容誤差の範囲以内か範囲外かを判定する。位置情報が緯度と経度で表される場合は、現位置情報とサイト位置情報の差は、これらの緯度の差と経度の差として求める。
【0070】
現位置情報とサイト位置情報の差が予め定めた許容誤差の範囲以内の場合には、ブロック408にて、事象取出し部20に事象の取出しを命令する。事象取出し部20は、事象バッファ26に蓄積されている事象を、事象バッファ26の先頭から順に取出す。
【0071】
その後、ブロック410にて、事象取出し部20が取出した事象を基にして、自動通報メッセージを作成する。自動通報メッセージは、音声、文字列若しくは画像又はこれらの組み合わせから構成される。また、自動通報メッセージには、アドレス設定・サイト位置情報設定部12が設定した通報先アドレス18(図3のブロック206参照)を付け加える。これにより、自動通報メッセージの通報先(端末機器のネットワークアドレス、例えば携帯電話の電話番号)を特定する。自動通報メッセージには、1つ又は複数の通報先アドレス18を付け加えることができる。
【0072】
ブロック412にて、ブロック410で作成した自動通報メッセージを、自動通報送信部24へ送信する。自動通報送信部24は、端末機器34、36に自動通報メッセージを送信する。
【0073】
続くブロック414で、事象バッファ26に蓄積されている全ての事象について処理が終了したかどうか判定する。事象バッファ26が空になっている場合は、全ての事象について処理が終了したと判定する。全ての事象について処理が終了していない場合、すなわち事象バッファ26が空でない場合は、空になるまでブロック408〜ブロック414の処理を繰り返す。
【0074】
ブロック406の判定で、サイト位置情報と現位置情報との差が予め定めた許容誤差の範囲外の場合には、ブロック416にて、現位置情報がサイト位置情報と異なっており自動通報メッセージを作成しなかった旨を通知する警報を、運転監視操作卓102に出力する。
【0075】
本発明による自動通報システムは、プロセス監視制御システムに用いられ、実稼働サイト(例えば、納入された顧客サイト)にてプロセス監視制御システムが稼動している場合のみに自動通報を発報する。従って、顧客及びメーカのセキュリティ及び信頼性を向上できるという効果がある。
【符号の説明】
【0076】
1…遠隔配信機構、10…運転監視操作卓の内部機構、12…アドレス設定・サイト位置情報設定部、14…位置情報取得部、16…サイト位置情報記憶部、18…通報先アドレス、20…事象取出し部、22…位置情報判定・自動通報編集部、24…自動通報送信部、26…事象バッファ、28…事象受付部、30…端末機器の内部機構、32…ネットワークインフラ、34、36…端末機器、38…受信部、40…格納部、41…通報情報バッファ、42…表示部、45…GPS衛星、48…プロセス監視制御装置の内部機構、50…事象送信部、52…事象検出部、54…プロセス制御部、56…プロセス、100…通信回線、102…運転監視操作卓、104…GPS受信部、106…ネットワーク接続機器、108…上位回線、110、112…プロセス監視制御装置、114、126…流量検出端、116、132…配管、118、128…調節弁、120…反応缶、122…ジャケット、124、130…温度検出端。
【特許請求の範囲】
【請求項1】
運転監視操作卓とプロセス監視制御装置と遠隔配信機構を備え、
前記運転監視操作卓は、前記プロセス監視制御装置から受信したプロセスの事象である警報や指示を蓄積し、前記遠隔配信機構は、前記運転監視操作卓が蓄積した前記事象を基に作成したメッセージを端末機器に送信する送信部を備える自動通報システムにおいて、
前記遠隔配信機構は、
前記運転監視操作卓に前記事象が蓄積されたことを検出し、前記運転監視操作卓から前記事象を取出す事象取出し部と、
自己の地球上の位置情報を取得する位置情報取得部と、
運転員の操作により、前記位置情報をサイト位置情報として取得するために前記位置情報取得部を起動させるアドレス設定・サイト位置情報設定部と、
前記事象取出し部が前記運転監視操作卓に前記事象が蓄積されたことを検出したら、前記位置情報取得部を起動させて前記位置情報を現位置情報として取得し、前記現位置情報と前記サイト位置情報との差が予め定めた許容誤差の範囲以内かどうかを判定する位置情報判定部とを備え、
前記差が前記許容誤差の範囲以内の場合には、前記送信部が前記メッセージを前記端末機器に送信する、
ことを特徴とする自動通報システム。
【請求項2】
請求項1記載の自動通報システムにおいて、
前記運転監視操作卓は、前記遠隔配信機構を備える自動通報システム。
【請求項3】
請求項1記載の自動通報システムにおいて、
前記プロセス監視制御装置は、前記遠隔配信機構を備える自動通報システム。
【請求項4】
請求項1乃至3のいずれか1項記載の自動通報システムにおいて、
前記アドレス設定・サイト位置情報設定部は、運転員の操作により、前記メッセージの送信先のアドレスを設定する自動通報システム。
【請求項5】
請求項1乃至4のいずれか1項記載の自動通報システムにおいて、
前記位置情報判定部は、前記差が前記許容誤差の範囲外の場合には、警報を前記運転監視操作卓に出力する自動通報システム。
【請求項6】
プロセス監視制御装置から受信したプロセスの事象である警報や指示を運転監視操作卓に蓄積し、前記運転監視操作卓が蓄積した前記事象を基に作成したメッセージを端末機器に送信する自動通報方法において、
運転員の操作により、自己の地球上の位置情報をサイト位置情報として取得する工程と、
前記運転監視操作卓に前記事象が蓄積されたことを検出したら、前記位置情報を現位置情報として取得する工程と、
前記現位置情報と前記サイト位置情報との差が予め定めた許容誤差の範囲以内かどうかを判定する工程と、
前記差が前記許容誤差の範囲以内の場合には、前記メッセージを前記端末機器に送信する工程とを有する、
ことを特徴とする自動通報方法。
【請求項7】
請求項6記載の自動通報方法において、
運転員の操作により、前記メッセージの送信先のアドレスを設定する工程を有する自動通報方法。
【請求項8】
請求項6又は7記載の自動通報方法において、
前記差が前記許容誤差の範囲外の場合には、警報を前記運転監視操作卓に出力する工程を有する自動通報方法。
【請求項1】
運転監視操作卓とプロセス監視制御装置と遠隔配信機構を備え、
前記運転監視操作卓は、前記プロセス監視制御装置から受信したプロセスの事象である警報や指示を蓄積し、前記遠隔配信機構は、前記運転監視操作卓が蓄積した前記事象を基に作成したメッセージを端末機器に送信する送信部を備える自動通報システムにおいて、
前記遠隔配信機構は、
前記運転監視操作卓に前記事象が蓄積されたことを検出し、前記運転監視操作卓から前記事象を取出す事象取出し部と、
自己の地球上の位置情報を取得する位置情報取得部と、
運転員の操作により、前記位置情報をサイト位置情報として取得するために前記位置情報取得部を起動させるアドレス設定・サイト位置情報設定部と、
前記事象取出し部が前記運転監視操作卓に前記事象が蓄積されたことを検出したら、前記位置情報取得部を起動させて前記位置情報を現位置情報として取得し、前記現位置情報と前記サイト位置情報との差が予め定めた許容誤差の範囲以内かどうかを判定する位置情報判定部とを備え、
前記差が前記許容誤差の範囲以内の場合には、前記送信部が前記メッセージを前記端末機器に送信する、
ことを特徴とする自動通報システム。
【請求項2】
請求項1記載の自動通報システムにおいて、
前記運転監視操作卓は、前記遠隔配信機構を備える自動通報システム。
【請求項3】
請求項1記載の自動通報システムにおいて、
前記プロセス監視制御装置は、前記遠隔配信機構を備える自動通報システム。
【請求項4】
請求項1乃至3のいずれか1項記載の自動通報システムにおいて、
前記アドレス設定・サイト位置情報設定部は、運転員の操作により、前記メッセージの送信先のアドレスを設定する自動通報システム。
【請求項5】
請求項1乃至4のいずれか1項記載の自動通報システムにおいて、
前記位置情報判定部は、前記差が前記許容誤差の範囲外の場合には、警報を前記運転監視操作卓に出力する自動通報システム。
【請求項6】
プロセス監視制御装置から受信したプロセスの事象である警報や指示を運転監視操作卓に蓄積し、前記運転監視操作卓が蓄積した前記事象を基に作成したメッセージを端末機器に送信する自動通報方法において、
運転員の操作により、自己の地球上の位置情報をサイト位置情報として取得する工程と、
前記運転監視操作卓に前記事象が蓄積されたことを検出したら、前記位置情報を現位置情報として取得する工程と、
前記現位置情報と前記サイト位置情報との差が予め定めた許容誤差の範囲以内かどうかを判定する工程と、
前記差が前記許容誤差の範囲以内の場合には、前記メッセージを前記端末機器に送信する工程とを有する、
ことを特徴とする自動通報方法。
【請求項7】
請求項6記載の自動通報方法において、
運転員の操作により、前記メッセージの送信先のアドレスを設定する工程を有する自動通報方法。
【請求項8】
請求項6又は7記載の自動通報方法において、
前記差が前記許容誤差の範囲外の場合には、警報を前記運転監視操作卓に出力する工程を有する自動通報方法。
【図1A】


【図1B】
【図1C】
【図2A】
【図2B】

【図2C】
【図3】
【図4】
【図5】

【図1B】
【図1C】
【図2A】
【図2B】
【図2C】
【図3】
【図4】
【図5】
【公開番号】特開2013−25758(P2013−25758A)
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願番号】特願2011−163177(P2011−163177)
【出願日】平成23年7月26日(2011.7.26)
【出願人】(000233549)株式会社日立ハイテクコントロールシステムズ (130)
【Fターム(参考)】
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願日】平成23年7月26日(2011.7.26)
【出願人】(000233549)株式会社日立ハイテクコントロールシステムズ (130)
【Fターム(参考)】
[ Back to top ]