
自動運転車および自動運転車運行システム
【課題】 運行アルゴリズムが簡易で使いやすい。経路設定,変更が容易でシステム設定,維持及び管理が容易。運行エラー防止。交差点競合防止。
【解決手段】 自走機構22〜27を備える車体2;路面上案内線条1を撮影する装置4;撮影画面の線条像の位置および姿勢を検出する手段9;該位置および姿勢に対応して、案内線条に沿って走行するように自走機構を操作する運転手段9,29;案内線条に付加したコード標識の画面上の像を認識して識別コードを検出する標識検出手段9;および、運行経路上の通行点及び分岐点を識別コードで表しそこでの運行指示(アクション)を該識別コードに付した地点情報(セル内データ)の群でなる運行予定表(Excelのbook)を保持し、標識検出手段が検出した識別コードを運行予定表の識別コードと照合して、該識別コードに付された運行指示に従い、運転手段を制御する運転制御手段9;を備える。
【解決手段】 自走機構22〜27を備える車体2;路面上案内線条1を撮影する装置4;撮影画面の線条像の位置および姿勢を検出する手段9;該位置および姿勢に対応して、案内線条に沿って走行するように自走機構を操作する運転手段9,29;案内線条に付加したコード標識の画面上の像を認識して識別コードを検出する標識検出手段9;および、運行経路上の通行点及び分岐点を識別コードで表しそこでの運行指示(アクション)を該識別コードに付した地点情報(セル内データ)の群でなる運行予定表(Excelのbook)を保持し、標識検出手段が検出した識別コードを運行予定表の識別コードと照合して、該識別コードに付された運行指示に従い、運転手段を制御する運転制御手段9;を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、路面に設けられた案内線条をカメラで撮影して画像認識によりカメラに対する案内線条の相対位置及び姿勢を検出しそれらに基づいて、車体が該案内線条に沿って走行するように自走運転機構を制御する自動運転車およびその運行システムに関する。
【背景技術】
【0002】
【特許文献1】特許第2902687号公報
【特許文献2】特開平11−231935号公報
【特許文献3】特開平 8−211936号公報。
【0003】
特許文献1には、AGV(Automatically Guided Vehicle)運行コマンドに応じてホストコンピュータがAGV運行ルート(運行スケジュール)を作成し、可視ナビゲーションシステムカメラでAGV位置を監視し、ワイヤレス赤外トランシーバを介してAGVに運行コマンドを与える自動案内車両制御が記載されている。特許文献2には、車両上のユーザがマップ入力により行き先を指定した後は、車両上のアンテナで車両位置を確認し、地上のコントローラとの無線通信により、該コントローラが自動走行制御をする、自動車両制御システムが記載されている。特許文献3には、移動経路に沿って張られた、交差点表示,運行内容指示等のマーカを、車両上の、前方マーカ検出カメラと直下マーカ認識カメラで撮影して、前方マーカ検出カメラで撮影したマーカの位置に基づいてステアリングし、マーカ認識カメラで撮影したマーカ標識に基づいて交差点,運行内容指示を解読する自動運転車が記載されている。
【発明の開示】
【発明が解決しようとする課題】
【0004】
従来、自動運転車例えば無人搬送車の経路誘導方式としては、路面に貼着した磁気テープによる誘導、光学反射テープ又は塗膜による誘導が主であり、これらの方式においては、工場内のレイアウト変更や工程順路の変更に伴って走行経路を変更する毎に、磁気テープあるいは光学反射テープを再配設する手間が大きく、かつ多額の費用が発生する問題がある。
【0005】
また、運行管理システムとしては、コース上の分岐を左右どちらに曲がるか、あるいはどの駅に停車するかは、無人搬送車側で予め一意に決めている運行管理が主であり、走行経路変更や行程順序の変更に伴い、無人搬送車側の制御プログラムも変更する手間が発生する問題がある。
【0006】
また、カメラ画像内の特徴物を検知して走行する方式では、反射光により本来黒である画像を白と誤認識する可能性が非常に高くなることや床面の汚れがあると、即走行ミスに繋がる問題がある。また、無人搬送車の走行位置を確認する手段はなく、走行位置確認に無線LAN(TCP/IP)を使用するシステムもない。
【0007】
また、交差点管理としては、ラジコン無線機等の信号機をコース上に設置し、無人搬送車側にもラジコン無線機を搭載して行う等、物理的な設置・スペースが必要となる為、これも走行経路変更に伴う手間が問題となる。また、交差点管理を無線LAN(TCP/IP)で行うシステムもない。また走行中、最も近くにあるアクセスポイントに接続を切り替えながら走行する無人搬送車も存在していない。また、無人搬送車の運行に必要な物(制御プログラム・運行予定表・AP切替表)をサーバPCからダウンロードする無人搬送車はなかった。
【0008】
本発明は、運行経路を自動走行するためのアルゴリズムが簡易で使いやすい自動運転車を提供することを第1の目的とし、走行経路の設定,変更が容易でシステム設定,維持及び管理が容易な自動運転車運行システムを提供することを第2の目的とする。自動運転車の運行エラーを防止することを第3の目的とし、交差点への複数の自動運転車の競合進入を防止することを第4の目的とする。
【課題を解決するための手段】
【0009】
(1)自走機構(22〜27)を備える車体(2);
該車体の走行方向直前の路面上の案内線条(1)する撮影装置(4);
該撮影装置が撮影した画面の案内線条像の位置および姿勢を検出する線条像検出手段(9);
前記位置および姿勢に対応して、前記案内線条に沿って走行するように前記自走機構を操作する運転手段(9,29);
前記案内線条に付加されたコード標識の前記画面上の像すなわちコード標識像を認識して該コード標識像が表す識別コードを検出する標識検出手段(9);および、
運行経路上の通行点及び分岐点を識別コードで表しそこでの運行指示(アクション)を該識別コードに付した地点情報(セル内データ)の群でなる運行予定表(Excelのbook)を保持し、前記標識検出手段が検出した識別コードを前記運行予定表の識別コードと照合して、該識別コードに付された運行指示に従い、前記運転手段を制御する運転制御手段(9);
を備える自動運転車(AGV001)。
【0010】
なお、理解を容易にするために括弧内には、図面に示し後述する実施例の対応要素又は相当要素の符号又は対応事項を、例示として参考までに付記した。以下も同様である。
【発明の効果】
【0011】
案内線条(1)だけで運行経路を構成しているので、安価であり、また案内線条(1)の張替えだけで走行経路変更に柔軟に対応できる。さらに、運行予定表に基づいて走行するので、走行経路変更伴う自動運転車の運行制御プログラムを変更する必要がなく、運行予定表だけを変更するだけで走行経路変更に柔軟に対応できる。また、運行予定表に基づいて運行管理しているので、運行予定表の内容を書き換えることで、自動運転車の運行を自由自在に変更できる。
【0012】
(2)前記撮像装置は、前記車体の走行方向直前の路面を狙うカメラ,該カメラへの乱反射光の入射を制限する偏光レンズ、および、前記カメラの光軸が路面と交わる地点を照明する照明装置、を含む、上記(1)に記載の自動運転車。カメラに偏光レンズを付けているので、反射光が遮断され、標識コード検出の信頼性が高い。
【0013】
(3)前記線条像検出手段(9)は、前記撮影装置が撮影した画面上の像の中央位置,該画面の基準線に対する角度および面積を算出し、算出した面積が一定範囲にある像を案内線条像と決定し、該案内線条像の角度および中央値を運転制御命令に変換し(s15);前記運転手段(9,29)は該運転制御命令にしたがって前記自走機構(22〜27)を操作する;上記(1)又は(2)に記載の自動運転車。輪郭の中央値と角度から操舵等の運転制御命令を生成しているので、操舵制御を主とする運転制御を決定するアルゴリズムを簡単にできる。また、輪郭面積が一定範囲内にあるものだけを有効輪郭とするので、外乱光や床面の汚れによる輪郭誤検出による走行ミスが低減する。
【0014】
(4)前記コード標識は、番地有マークと数字標識(bit0〜bit5)から構成され、該番地有マークは、前記案内線条(1)と並んでおり、該番地有マークの後端の直後に前記数字標識があり;前記標識検出手段(9)は、前記撮影装置(4)が撮影した画面の番地有マーク像の後端の直後領域の数字標識(bit0〜bit5)を前記コード標識像と認識する;上記(1)乃至(3)のいずれか1つに記載の自動運転車。番地有マークを走行本線である案内線条(1)と並べているので、同一走行路を逆走する場合も走行経路上の数字標識(bit0〜bit5)を正しく認識できる。
【0015】
(5)前記自動運転車(AGV001)は、運行経路上の行先地点をユーザが入力する行先地点入力手段(9のキーボード)を備え;前記運転制御手段(9)は、行先地点をユーザが入力すると前記運転手段(9,29)による前記案内線条(1)に沿う走行を開始し、前記標識検出手段(9)が検出した識別コードが前記行先地点入力手段によって入力された行先地点を表す識別コードと合致すると、前記運転手段(9,29)による走行を停止する;上記(1)乃至(4)のいずれか1つに記載の自動運転車。
【0016】
(6)前記自動運転車(AGV001)は、前記運行予定表を作成し保持するサーバ(31)と無線通信する通信手段(無線LAN)を備え;運転制御手段(9)は、該通信手段を介して前記サーバ(31)から前記運行予定表を入手し保持する;上記(1)乃至(5)のいずれか1つに記載の自動運転車。自動運転車の運行に必要な運行予定表をサーバ(31)からダウンロードしてから使用するようにしているので、サーバ(31)に置かれている運行予定表を更新するだけでよく、各自動運転車無毎に運行予定表を更新する手間を省くことができる。
【0017】
(7)前記運転制御手段(9)は、前記標識検出手段(9)が検出した識別コードが交差点入口であると、前記通信手段を介して前記サーバ(31)に該交差点入口の閉鎖中情報(交差点番号ファイルのLock)があるかを検索し、ないと前記サーバ(31)に該交差点入口の閉鎖中情報(交差点番号ファイルのLock)を作成し該交差点入口を通過し、あった場合には、そこで走行を停止し、交差点入口停止中情報(交差点入口停止中Flag ON)を生成する;上記(6)に記載の自動運転車。
【0018】
(8)前記運転制御手段(9)は、前記交差点入口を通過し前記標識検出手段(9)が検出した識別コードが交差点出口であると、前記サーバ(31)の該交差点入口の閉鎖中情報を消去(交差点番号ファイルをun lock)し、一方、交差点入口停止中情報(交差点入口停止中Flag ON)を生成したときはその後前記交差点入口の閉鎖中情報が消えると該交差点入口の閉鎖中情報を作成し該交差点入口を通過する;上記(7)に記載の自動運転車。
【0019】
(9)前記運転制御手段(9)は、動作電源が印加された直後に自車宛てファイル(AGV001ファイル)を前記サーバ(31)に生成し、前記標識検出手段(9)が識別コードを検出するたびにそれを該自車宛てファイルに書込む;上記(7)又は(8)に記載の自動運転車。
【0020】
(10)路面上の案内線条(1)、および、該運行経路上の通行点及び分岐点において案内線条に付加された、各通行点又は分岐点を特定するコード標識、を含む運行経路上の、スタート点から行先地点に至る「行き経路」および該行先地点から前記スタート点に戻る「復帰経路」の通行点及び分岐点を識別コードで表しそこでの運行指示を識別コードに付した地点情報(セルのデータ)の群でなる運行予定表(Excelのbook)を、ユーザ入力に応じて作成し登録保持するコンピュータ、および、複数の自動運転車のそれぞれと選択的に無線通信する地上通信手段、を備えるサーバ(31);ならびに、
自走機構(22〜27)を備える車体(2),該車体の走行方向直前の路面上の案内線条(1)を撮影する撮影装置(4),該撮影装置が撮影した画面の案内線条像の位置および姿勢を検出する線条像検出手段(9),前記位置および姿勢に対応して、前記案内線条に沿って走行するように前記自走機構を操作する運転手段(9,29),前記画面の、案内線条に付加されたコード標識の前記画面上の像すなわちコード標識像を認識して該コード標識像が表す識別コードを検出する標識検出手段(9),前記サーバ(31)と無線通信する車上通信手段(無線LAN)、および、該車上通信手段を介して前記サーバ(31)から前記運行予定表を取得して保持し、前記標識検出手段(9)が検出したコード標識像が表す識別コードを前記運行予定表の識別コードと照合して、該識別コードに付された運行指示に従い、前記運転手段(9,29)を制御する運転制御手段(9)、をそれぞれが備える複数の自動運転車(AGV001〜AGV003);を含む自動運転車運行システム。
【0021】
(11)各自動運転車(AGV001〜AGV003)の前記運転制御手段(9)は、動作電源が印加された直後に前記サーバ(31)から前記運行予定表をダウンロードし、そして、自車宛てファイル(AGV00Xファイル;X=1〜3)を前記サーバ(3)に生成し、その後、前記標識検出手段(9)が識別コードを検出するたびにそれを該自車宛てファイルに書込む;上記(10)に記載の自動運転車運行システム。
【0022】
(12)前記運行予定表は、1つの行先地点を通行する1つの運行経路の前記地点情報群でなる運行予定の、行先地点が異なる複数を含み;前記自動運転車は、行先地点をユーザが入力する行先地点入力手段(ノートPC9のキーボード)を備え;前記運転制御手段(9)は、行先地点をユーザが入力すると前記運転手段(9,29)による前記案内線条(1)に沿う走行を開始し、前記標識検出手段(9)が検出した識別コードが、前記行先地点入力手段によって入力された行先地点の前記運行予定の中の該行先地点を表す識別コードと合致すると、前記運転手段による走行を停止する;上記(10)又は(11)に記載の自動運転車運行システム。
【0023】
(13)前記運転制御手段(9)は、前記標識検出手段(9)が検出した識別コードが交差点入口であると、該交差点宛の交差点識別ファイルが前記サーバ(31)に存在しないと該サーバに該交差点識別ファイルを生成して該ファイルをロックして該交差点入口を通過し、該交差点の出口で該ファイルをアンロックし、前記交差点識別ファイルが前記サーバ(31)に存在した場合には前記交差点識別ファイルがロックされていると走行を停止するがアンロックであると該ファイルをロックして該交差点入口を通過し、該交差点の出口で該ファイルをアンロックする;上記(10)乃至(12)のいずれか1つに記載の自動運転車運行システム。サーバ(31)と各自動運転車が1対多でTCP/IP無線接続して交差点管理をしているので、ラジコン無線機等の物理的な設置・スペースが不要となる。また、最も普及しているTCP/IP無線LANを使用しているので、システムの導入を容易し、付加価値の高いシステムを提供することができる。
【0024】
(14)前記サーバ(31)と各自動運転車(AGV001〜AGV003)との通信接続は、TCP/IP無線接続である;上記(10)乃至(13)のいずれか1つに記載の自動運転車運行システム。最も普及しているTCP/IP無線LANを使用しているので、システムの導入を容易にし、付加価値の高いシステムを提供することができる。サーバ(31)と各自動運転車が1対多でTCP/IP無線接続し、各無人搬送車の走行状況をサーバ(31)に通知できるので、サーバ(31)側で各自動運転車の走行状況を知ることができる。
【0025】
(15)前記運転制御手段(9)は、前記標識検出手段(9)が識別コードを検出する毎に、該識別コードを表すコード標識がある地点に最も近い無線アクセスポイントに、前記車上通信手段の接続を切換える(s42);上記(14)に記載の自動運転車運行システム。
【発明を実施するための最良の形態】
【0026】
本発明の他の目的及び特徴は、図面を参照した以下の実施例の説明より明らかになろう。
【実施例1】
【0027】
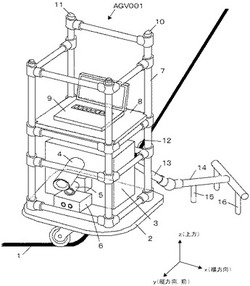
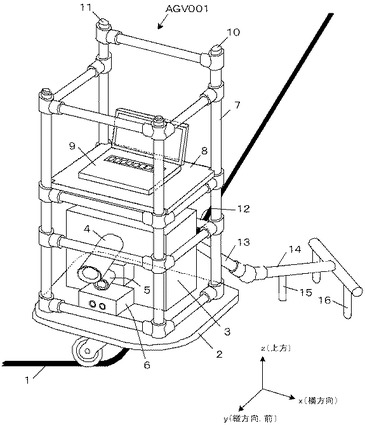
図1に、本発明の一実施例の自動運転車である、牽引車仕様の無人搬送車AGV001を示す。AGV001は、案内線条の1態様である、黄緑色路面に貼付けられた黒ビニールテープ1、に沿って自動走行する。AGV001の車体2には、バッテリ収納ケース3があり、その内部に電気モータに給電するバッテリ(蓄電池)が入っている。ケース3には、車体2の直前の路面を撮影する撮影装置4が、その視野中心線の対路面角度を35度にして、設置されている。また、撮影装置4の視野中心線が路面と交わる位置を照明装置5が照明する。照明装置5の光源は蛍光灯である。
【0028】
撮影装置4には、USBカメラと偏光レンズがある。偏光レンズは、USBカメラのレンズの前に装着してあり、路面および黒ビニールテープ1の表面反射光(照返し)を遮断し、撮影画面のハレーションやハイライトを抑止する。
【0029】
照明装置5の下には、超音波方式の障害物センサ6が車体前方に向けて設置されている。この障害物センサ6が障害物(人,物体)を検知したときは、車体2を走行駆動する電気モータの駆動が停止され、ロータの回転がロックされる。この状態が、障害物センサ6が障害物を検出しなくなるまで継続する。
【0030】
車体には、衝突時の衝撃吸収用の弾力材を被覆した、防護柵でもあるパイプフレーム7が備わっており、該フレーム7に固着した台板8に、ノートパソコン(ノートPC)9が固定されている。また、フレーム7には、ワンタッチボタン方式の、走行開始指示用および緊急停止解除(走行再開指示)用のスタートスイッチ10および緊急停止用のストップスイッチ11を装備している。ユーザがスタートスイッチ10を押すとAGV001は走行を開始する。車体が走行中にユーザがストップスイッチ11を押すと車体2は走行を停止し、その後スタートスイッチ10を押すと車体2が走行を再開する。
【0031】
パイプフレーム7の、ケース3背部の水平パイプ12には、牽引アーム13が水平パイプ12を中心に垂直回動可に結合している。牽引アーム13の自由端には、ボールジョイント(自在継手)を介して連結アーム14が連結しており、該連結アーム14に、牽引対象の台車あるいは荷車との係合具15,16が備わっている。
【0032】
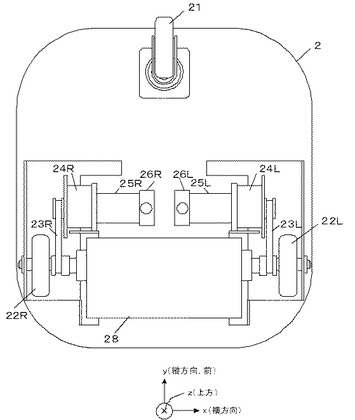
図2に、車体2の下面を示す。図2は、図1に示す車体2の下面を下から見上げた平面図である。車体2には、前輪21および後輪22R,22Lがある。前車輪21は、車軸を中心に車輪が自由回転し、しかも車軸支持枠が垂直軸を中心に回動可のキャスタである。後輪22Rおよび22Lはそれぞれ、タイミングベルト23R,23Lおよび減速機24R,24Lを介して電気モータ25R,25Lで回転駆動される。電気モータ25Rおよび25Lにはそれぞれロータリエンコーダ26Rおよび26Lが結合しており、電気モータ25R,25Lのロータの回転速度に周波数が比例する電気信号(指速パルス)を発生する。電気モータ25R,25Lを回転駆動するモータドライバ27R,27Lは、ケース28の内部にあって電気モータ25R,25Lに給電する。
【0033】
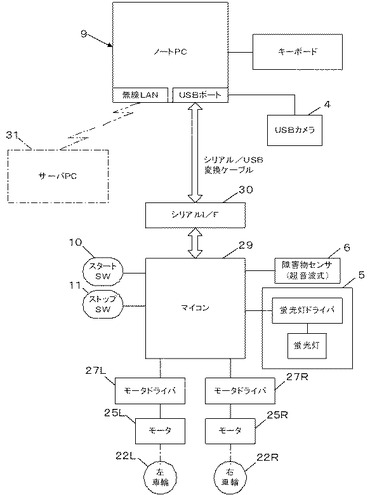
図3に、車体3上の電装系統の構成を示す。マイコン29は、CPU,RAM,ROMなどのコンピュータ機能要素を主体とするマイクロコンピュータであり、これに、図3に示すように、モータドライバ27R,27L他が接続されている。マイコン29は、ケース28(図2)内にあって、シリアルインターフェース(I/F)30を介して、ノートPC9(図1)と接続されている。図1に示す撮像装置4のUSBカメラは、ノートPC9のUSBポートに接続されている。ノートPC9には無線LANが備わっており、地上の、パソコン(PC)であるサーバ31に接続したAP(アクセスポイント)と無線接続できる。すなわちサーバ31と無線による通信をすることができる。本実施例では、2箇所にアクセスポイントAP1,AP2(図4)を設けている。
【0034】
AGV001上のノートPC9は、路面上の黒ビニールテープ1に沿って倣い走行するための運転制御命令を生成してマイコン29に与えると共に、路面のコード標識を検出してコード標識に対応付けられている運行指示(アクション;右折,左折,直進,停止,・・・)を解読して運行指示対応の運転制御命令を生成してマイコン29に与える。運転制御命令には、スタート,直進,低速,高速,右操舵,左操舵および停止がある。マイコン29は、低速/高速指示に応じて電気モータ25R,Lによる車輪22R,Lの駆動速度を、低速/高速とする。モータドライバ27R,27Lが、マイコン29が与える指示速度を目標速度とし、ロータリエンコーダ26R,26Lが発生する指速パルスの周波数(検出速度)をフィードバック速度値として、フィードバック速度値が目標速度となるように、モータ22R,22Lの回転速度を制御する。
【0035】
マイコン29は、右操舵指示に応じて、左車輪22Lの回転駆動を継続したまま右車輪22Rの回転駆動を停止し、左操舵指示があると、右車輪22Rの回転駆動を継続したまま左車輪22Lの回転駆動を停止する。
【0036】
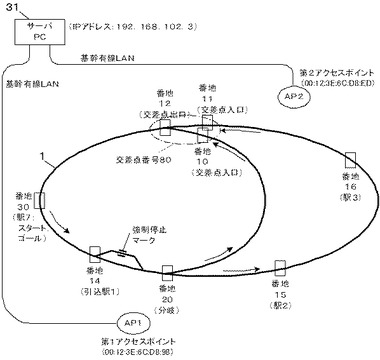
図4に、黒ビニールテープ1を床面に貼り付けて構成した運行経路の1例を、単純化して示す。この例は、番地30をスタートかつゴール点に定め、AGVの走行は反時計廻りと定め、この走行方向に関して、引込線の入り口ならびに荷物運搬における荷積点および荷卸点に番地および駅番号を定め、分岐点,交差点入り口および交差点出口に番地を定めたものである。これら、番地を定めた地点(四角ブロック位置)には、該番地を表現する識別コードを表すコード標識が、同じく路面に対する黒ビニールテープの貼着により、設けられている。この運行経路は、複数の、同一構造および同一機能の無人搬送車(AGV001〜AGV003)を同時に運行させるものである。
【0037】
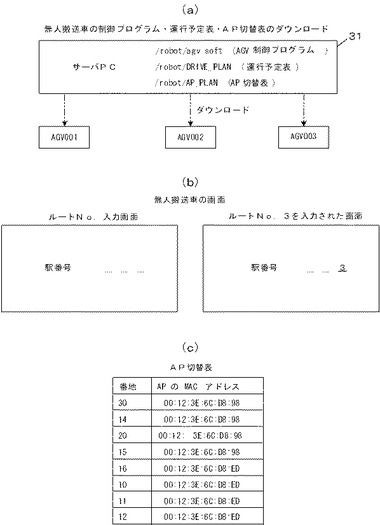
サーバ31には、Unix(登録商標)のNFS(Network File System)機構を利用した、共有フォルダ(/robot)が作成されており、該共有フォルダに、AGV制御プログラム(/robot/agv.soft),運行予定表(/robot/DRIVE_PLAN)およびAP切替表(/robot/AP_PLAN)が格納されている。AP切替表は、番地に近いAP(アクセスポイント)を番地宛に定めた参照表(LUT:ルックアップテーブル)である。
【0038】
AGV制御プログラム(/robot/agv.soft)には、AGV運転アプリケーション,所在認識アプリケーション,交差点管理アプリケーション,運行予定表管理ファイル(/robot/DRIVE_PLAN) ,AP切替表管理ファイル(/robot/AP_PLAN)が組み込まれている。運行予定表(/robot/DRIVE_PLAN)は、表計算ソフトであるExcelによって作成されたbook(表)である。表1aに、図4に示す運行経路に適用する運行予定表の一例を示す。
【0039】
【表1】

【0040】
運行予定表の駅番号は、Exselのbook(表)の行番号であり、各駅番号(各行)は1つの運行予定を表し、それぞれスタート点から出発して一方向に走行してスタート点に戻るループ経路上の駅(通行点),引込点および交差点、すなわち節点(ノード)に、走行方向の並び順で、book(表)上の同一行上の各セル(データ入力升目)を、book(表)上左側のものから順番に割り当て、各セルに対応点の地点情報を入力したものである。しかも、行番号位置の駅番号は、該行番号の各セルの地点情報が表す地点(上記駅など)を順次に通行する1つの運行予定(ルート)での、行先地点(目的地点,到達地点:到達すると停止する地点)を意味する。各セルには、CSV(Comma Separated Value)方式で地点情報が入力されている。
【0041】
該地点情報は、本実施例では、番地,地点種別,およびアクション(運行指示)を含み、番地は十進数で、地点種別およびアクションはアルファベットで表している。地点種別およびアクションを表すアルファベットを、表1a上に、運行予定表に付加して示した。また、運行予定表の第1行の駅番号1の運行予定の、各地点情報(各セルのデータ)が意味する内容を、表1bに示した。なお、本実施例では、スタート点とゴールG(復帰点)とは同一地点である。
【0042】
図1および図4に示す、路面に貼った黒ビニールテープ1および上記コード標識は、市販の幅19mmの黒ビニールテープである。撮像装置4のUSBカメラが撮影した画面(横160dot、縦120dot)は、撮像装置4からの水平距離が15cmの路面上の横方向22cmを短辺とし、そこからさらに前方25cmの路面上の横方向33cmを長辺とする台形領域の画像を表す。
【0043】
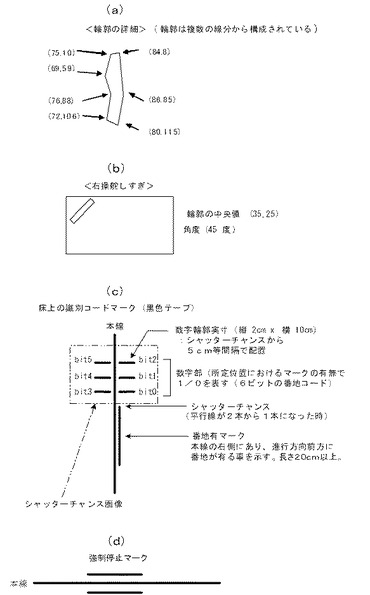
AGV001上のノートPC9は、PC上で実行する画像処理ライブラリを用いて、カメラが撮影した画面上の黒ビニールテープの輪郭を抽出する。次に、輪郭の面積,中央値および角度(画面の縦軸に対する傾斜角度)を算出する。例えば、図5の(a)に示すように、輪郭が7つの線分から構成されているものとする。x:横方向、y:縦方向とする。各線分の座標は(75,10),(69,59),(76,88),(72,106),(84,8),(86,85),(80,115)である。
【0044】
中央値x=(x最大値+x最小値+1)/2=(86+69+1)/2=78
中央値y=(y最大値+y最小値+1)/2=(115+8+1)/2=62
atan((y最大値−y最小値+1)/(x最大値−x最小値+1))
=atan((115−8+1)/(86−69+1))=約81度
真上を0度基準としているので、90−81=9度、また角度は、左右の向きも反映する必要があるので、
「xが最小値をとる時のy<xが最大値をとる時のy」であれば、左向き(―符号)、
「xが最小値をとる時のy>=xが最大値をとる時のy」であれば、右向き(+符号)、
とする。上記7つの座標であれば、xが最小値をとる時のy=59、xが最大値をとる時のy=85なので角度=−9度、となる。
【0045】
面積は、画像処理ライブラリ側が求めたものをそのまま使用する。結果として、
中央値:(78,62),角度:(−9),面積(1500)
が算出されたとする。有効なテープ輪郭条件として、面積が950(19mmx50mm)〜5700(19mmx300mm)の輪郭に制限する。すなわち、面積が950〜5700mm以内の輪郭を有効とする。これは、床面の汚れを輪郭と誤検知することを防止する為に、950mm未満の輪郭はテープ輪郭と見なさず、5700mmを超える輪郭もテープ輪郭とみなさないことを意味する。
【0046】
次に、中央値と角度から車体2の運転条件を次のように決定する:
中央値のx座標値が、60≦x≦100ならば、直進、
x<60 ならば、左操舵、
100<x ならば、右操舵、
角度が、20度未満 ならば 直進、
―20度以上 ならば 左操舵、
+20度以上 ならば 右操舵、
最終的な操舵方向は、中央値と角度の相関関係より決定する。
【0047】
例えば図5の(b)に示す「右操舵しすぎ」のように、角度(45度)だけで最終操舵を決定すると、さらに右操舵を継続することになり、テープがカメラ視野から消えてしまうので、図5の(b)に示す中央値(35,25)、角度(45度)の場合は、中央値を採用し左操舵とする。つまり、常にテープ輪郭がカメラ画面の中央付近に来るように、中央値と角度の相関関係により、最終的な操舵方向を決定する。これは人が車の運転をする時と同じような制御である。
【0048】
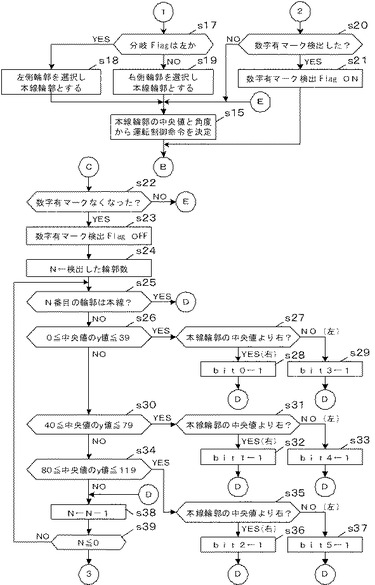
次に、路面上のコード標識が表す識別コードの検出を、説明する。識別コードのコード標識は、図5の(c)に示す、案内線条である黒ビニールテープ1の左右に分布する6本の領域に定め、その直前に「番地有マーク」を付加して、コード標識があることを示す。6本のそれぞれは、図5の(c)に示すように、6ビットデータの各ビットに宛てられており、標識となる黒ビニールテープがあるとビット「1」、ないとビット「0」である。
【0049】
案内線条である黒ビニールテープ1の、画面上の像を本線というと、本線の右側に輪郭間角度差20度未満かつ長さ20cm以上の輪郭を検出すると「番地有マーク」と判断し、シャッターチャンスを待つ。シャッターチャンスとは、平行線(本線と番地有マーク)が2本から1本になった時の画面にコード標識が全て入っていることになっており、シャッターチャンスとは、このタイミングを意味する。シャッターチャンスでの撮影画面から輪郭を抽出すると本線を含めて最大7個の輪郭(本線とコード標識)が検出される。
【0050】
本線輪郭の中央値をM(x,y)、第1数字輪郭(コード標識)の中央値をS1(x,y)、第2数字輪郭の中央値をS2(x,y)、第3数字輪郭の中央値をS3(x,y)、第4数字輪郭の中央値をS4(x,y)、第5数字輪郭の中央値をS5(x,y)、第6数字輪郭の中央値をS6(x,y)、とする。bit0〜bit5の数字輪郭作成ルールは、シャッターチャンスから5cm等間隔でコード標識用の黒ビニールテープを配置する事になっているので、検知された中央値S1〜S6が次の表のどこに存在しているか否かで、各bitの「1」が存在するかを検出する。
【0051】
本線輪郭の左右 輪郭のY座標値
(M(x)の左右)
bit0 右 0≦y≦39 ならば 1
bit1 右 40≦y≦79 ならば 1
bit2 右 80≦y≦119 ならば 1
bit3 左 0≦y≦39 ならば 1
bit4 左 40≦y≦79 ならば 1
bit5 左 80≦y≦119 ならば 1
路面上のゴミを数字輪郭と誤検知することを防止したい時は、面積(100以上200mm2未満)や角度(60度以上)の制限を入れてもよい。図5の(c)の例では、
bit0 bit1 bit2 bit3 bit4 bit5
1 1 1 1 1 1
であり、16進数では3F、10進数では63となる。
【0052】
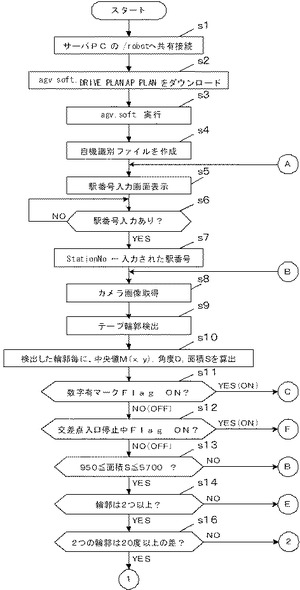
図8〜図10に、AGV001のノートPC9の、運行制御の概要を示す。これらの図面の、以下の説明に対応する処理ブロックの符号(sつき数値)を、以下の文章に括弧付きで挿入した。
【0053】
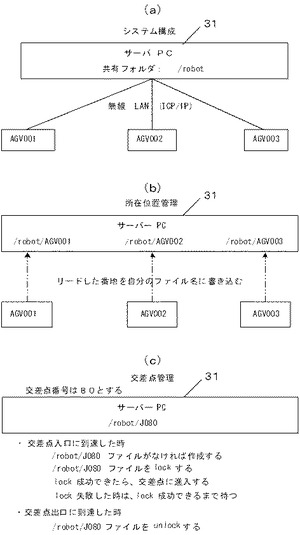
まず、無人搬送車AGV001のノートPC9に電源が投入され、ノートPC9のAGV運行アプリケーションが起動すると、ノートPC9は、図6の(a)に示すように、Unix(登録商標)のNFS(Network File System)機構を使用して、サーバ31側の「/robotフォルダ」と無人搬送車AGV001の「/robotフォルダ」を共有化する(s1)。他の同一構成,同一機能の無人搬送車AGV002,AGV003も同様である。これにより、サーバ31と複数の無人搬送車AGV001〜AGV003との、1対多の無線接続用の共有が構成される。
【0054】
次に、ノートPC9は、図7の(a)に示すように、サーバ31側にある/robot/agv.softと、/robot/DRIVE_PLANと、/robot/AP_PLANを、自機にダウンロードし(s2)、ノートPC9内のHDDに保存してから/robot/agv.softを実行する(s3)。次に、サーバ31に、「/robot/AGV001ファイル」があるかをチェックし、無い時はサーバ31に、「/robot/AGV001ファイル」を作成する(s4)。
【0055】
その後ユーザが、AGV001のノートPC9にキーボードから行先駅番号を入力し、スタートスイッチ10を押下する。これに応答してノートPC9は、運行予定表(表1a)上の、入力があった行先駅番号(行番号)の運行予定を特定して、AGV001の走行を開始する(s5,s6,s7)。ここで、行先駅3(行番号3)が入力されたものとし、そのときAGV001は、図4のスタート地点(番地30)(正確にはその直後)にあったものとする。行先駅3(行番号3)が入力されたとき、ノートPC9のディスプレイの表示は、図7の(b)の左側に示すものから、右側に示すものに切換る。
【0056】
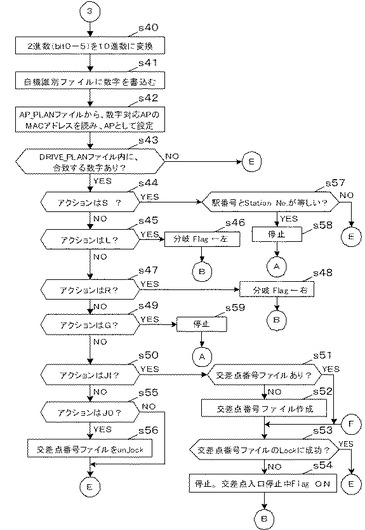
走行を開始した後、ステップs8以降の、撮影装置4による路面画像の撮影(s8),画像認識による、本線(黒ビニールテープ1)の検出と運転制御命令の生成(s11〜s15),識別コード(番地)の検出(s14〜s16−s20−s21−s8〜s11−s22〜s41),検出した識別コード(番地)対応の地点情報の検索(s42,s43)、および、検索により抽出した地点情報に対応した運行制御(s42〜S59,s12)を、設定短周期で繰り返し実行し、検出した識別コード(番地)の地点情報の駅番号が行先駅番号に合致したときにはそこでAGV001の走行を停止し、ノートPC9のディスプレイの表示を駅番号入力画面(入力駅番号なし)にする。その後ユーザが駅番号未入力のままでスタートスイッチ10を押すと、AGV001は同方向の走行を開始し、スタート(ゴールG)地点に到達するとそこで停止する。
【0057】
より具体的に説明する。スタート地点(の直後)で走行を開始し、最初の識別コード(番地)14を検出すると、行先駅3(行番号3)の運行予定の第1セルのデータ(地点情報)が「14:SPL:1」であるので、そこは駅1である。ノートPC9は、行先駅は「3」であるので、そこではAGV001を停止せず、サーバ31の「AGV001ファイル」(前記「/robot/AGV001ファイル」;以下同様に表現する)に14と書込む(s41)。そして、「AP切替表」の番地14に対応するAP「00:12:3E:6C:D8:98」を参照して、ノートPC9の無線LANの接続先APを「00:12:3E:6C:D8:98」に設定する。AP切替表の内容を図7の(c)に示す。このように、通行地点対応でAPアドレスを切換えることにより、識別コードを表すコード標識がある地点に最も近い無線アクセスポイントに、ノートPC9の無線LAN接続が切換えられる。
【0058】
しかし、行先駅は3なので、番地14の地点情報の中のアクション(SPL)は実行せず、そのまま進む。次に、番地20を読むとそこの地点情報が「20:R」なので、分岐を発見したら右へ行く。そして、サーバ31の「AGV001ファイル」に20と書込む。そして、「AP切替表」(図7の(b))の番地20に対応するAPは「00:12:3E:6C:D8:98」なので、ノートPC9の無線LANの接続先APを00:12:3E:6C:D8:98に設定する。そのまま直進すると分岐がある。ここで、輪郭が2つあり、かつ輪郭間角度差が20度以上あると分岐と認識する(s14−s16〜s20)。分岐を表すテープは本線1と重ならないように作成してある。中央値が右側寄りの線路を選択して走行する。
【0059】
次に、番地15を読むとその地点情報が「15:S:2」なので、駅2である。そこで、サーバ31の「AGV001ファイル」に15と書込む。そして、「AP切替表」の番地15対応のAP「00:12:3E:6C:D8:98」に、ノートPC9の無線LANの接続先を設定する。しかし、行先駅は3なので、番地15のアクションは何もせず、そのまま進む。
【0060】
次に、番地16を読むとその地点情報が「16:S:3」なので、駅3である。サーバ31の「AGV001ファイル」に16と書込む。そして、「AP切替表」の、番地16に対応するAP「00:12:3E:6C:D8:ED」に、ノートPC9の無線LANの接続先を設定する。行先駅は3なので、番地16のアクションを実行する。つまり、停車し、ノートPC9のディスプレイの表示を駅番号入力画面にする(s57,s58,s5)。
【0061】
駅3の作業員は、例えば、AGV001が牽引している台車上の荷物を降ろし、あるいは、牽引している台車に荷物を載せる。そして、次に、駅番号未入力のままでスタートスッチ11を押すと、ノートPC9は以前と同方向の走行(復帰走行)を開始する。なお、駅番号の入力がない状態でのスタートスイッチ10の押下は、スタート地点(ゴールG)への復帰指示である。
【0062】
この復帰走行中に、番地11を読むとその地点情報が「11:JI:80」なので、そこは、交差点入口で交差点番号は80である。サーバ31の「AGV001ファイル」に11と書込む。そして、「AP切替表」の、番地11に対応するAP「00:12:3E:6C:D8:ED」に、ノートPC9の無線LANの接続先APを設定する。
【0063】
交差点番号は80なので、サーバ31に「/robot/J080ファイル」があるかをチェックし、なければ作成する(s51,s52;図6の(c))。次に、Unix(登録商標)のファイルlock/unlock機構を利用して、/robot/J080ファイルをlockする。lock成功(ファイル使用可)できたら、そのまま交差点に進入する(s53)。lock失敗(ファイル使用不可)した時(別のAGVが/robot/J080をlock済の場合)は停止し、lock成功できるまで交差点入口で停止する(s54,s12,s53)。
【0064】
lock成功(ファイル使用可)でき、交差点に進入し、そして番地12を検出すると、その地点情報が「12:JO:80」なので、そこは交差点出口で交差点番号は80である。ここでサーバ31の「AGV001ファイル」に12と書込む。そして、「AP切替表」の、番地12に対応するAP「00:12:3E:6C:D8:ED」に、ノートPC9の無線LANの接続先を設定する。交差点番号は80なので「/robot/J080ファイル」をunlockする(s55,s56;図6の(c))。
【0065】
次に、番地30を検出すると、その地点情報は「30:G」なので、ゴール(スタート点)である。「AP切替表」の、番地30に対応するAP「00:12:3E:6C:D8:98」に、ノートPC9の無線LANの接続先を設定する。そして番地30のアクションを実行する。つまり、ゴールなので、停車し、ノートPC9のディスプレイの表示を、駅番号入力画面にする(s59,s5)。
【0066】
以上が、図4に示す、駅3(番地16)を通行するループ状経路(ルート)を、スタート(ゴール)地点の直後から出発して反時計回りに走行し、行先(目標)の駅3(番地16)で停止し、そしてユーザの復帰指示入力(駅番号入力なしのスタートスイッチ10押下)があると同方向の走行を再開してスタート(ゴール)地点の直後に戻って停止する、コース一周の運転制御である。
【0067】
以上のように、上述の自動運転車運行システムでは、運行経路の案内線条に、市販の片面粘着テープを用いているので、運行経路を安価に構成することができる。テープの張替えだけで走行経路変更に柔軟に対応でき、経路変更を簡単かつ安価に実施できる。上述の、自動運転車の1実施態様である無人搬送車AGV001は、コース上の数字を発見すると運行予定表からその数字に対するアクションを読んでそのアクション通りの動作をすることで、運行予定表に基づいた運行を行う。運行予定表に基づいた運行をするので、例えば、運行予定表の番地アクションを全て“−”(何もしない)に定義すると、グルグル回周する動きに変えることができる。このように、運行予定表の内容を変えることで、各種運行動作を行わせることができる。
【0068】
また、「運行予定表」で使える使用可能アクションに新しいアクションを定義することで、AGVに対して、いろいろな動作をさせることも可能なシステムになっている。例えば、Uターンを表す「U」を加えて、Uターンを行うようにすることができる。また、駅を表す「S:1」を「S:1:10:30」のように時刻情報「10:30」を追加定義して、駅出発時刻を指定することができ電車のようなダイヤ管理を行うことも可能である。
【0069】
また本実施例では、サーバ31の「AGV001ファイル」に、AGV001が路面から読み取った識別コードの番地を書くことでAGV001の走行位置がわかるようになっているが、番地以外の情報(指定された駅番号、ステータス(停止中,エラー発生中)、駅停止累計時間etc.)を書けば、より一層無人搬送車の状況を知ることが可能となる。サーバ31側で無人搬送車の走行状況を表示することも可能である。あるいは、他のPCからサーバ31にアクセスして、無人搬送車の走行状況を取得し表示することも可能である。
【0070】
なお、図5の(d)に示すように本線1の両側に番地有マークが2本ある時は、「強制停止」の意味を持たせることも可能である。この「強制停止」は、運行予定表に組み込む必要はない。また本実施例では、カメラに偏光レンズを付けることで路面および標識表面の高輝度反射光を遮断しているが、カメラ視野エリアを囲んでやれば、偏光レンズは不要となり、全ての外乱光をシャットアウトする事も可能である。更には、本実施例では黒ビニールテープを路面に貼着して案内線条としているが、その色は、撮像装置4が路面(背景)から明確に識別できる色であれば、黒に限らない。また、案内線条として、テープ状の塗装をすることも出来る。
【図面の簡単な説明】
【0071】
【図1】本発明の一実施例である無人搬送車AGV001の外観を示す斜視図である。
【図2】図1に示す車体2の下面を下から見上げた平面図である。
【図3】図1に示す無人搬送車AGV001の電気要素の概要を示すブロック図である。
【図4】図1に示す無人搬送車AGV001が運行する経路を示す平面図である。
【図5】(a)は、図1に示す撮影装置4の撮影画面上のテープ像から抽出した輪郭を示す平面図、(b)は無人搬送車AGV001の操舵が過剰なときの撮影画面上のテープ像位置を示す平面図、(c)は、案内線条である黒ビニールテープ1に付加されたコード標識を示す平面図、(d)は、強制停止を表す標識を示す平面図である。
【図6】(a)は、図4に示す運行経路の一台のサーバ31に対して、3台の無人搬送車AGVが無線通信によりサーバ31の共有フォルダにアクセスする1対多の接続態様を示すブロック図、(b)は、各無人搬送車AGVがサーバ31に自機宛てのAGVファイルを生成することを表すブロック図、(c)は、無人搬送車AGVが交差点入口に到達してから交差点出口を出るまでの、無人搬送車AGVの、サーバ31に対する行動を表すブロック図である。
【図7】(a)は、無人搬送車AGV001のノートPC9に電源が投入された直後に、ノートPC9がサーバ31から運行制御ソフト(アプリケーションプログラム等)をダウンロードする態様を示すブロック図、(b)は、ノートPC9のディスプレイに表示する、行先駅(ルート番号と同じ)入力画面と、入力済画面とを示す平面図、(c)は、ノートPC9が地点番地に最も近い無線アクセスポイントに接続するための、AP切替表の内容を示すブロック図である。
【図8】無人搬送車AGV001のノートPC9が実行する運行制御の概要の一部を示すフローチャートである。
【図9】ノートPC9が実行する運行制御の概要の他一部を示すフローチャートである。
【図10】ノートPC9が実行する運行制御の概要の残部を示すフローチャートである。
【符号の説明】
【0072】
AGV001:無人搬送車
1:黒ビニールテープ
2:車体
3:ケース
4:撮影装置
5:照明装置
6:障害物センサ
7:パイプフレーム
8:台板
9:ノートPC
10:スタートスイッチ
11:ストップスイッチ
12:水平パイプ
13:牽引アーム
14:連結アーム
15,16:係合具
21:前輪
22R,22L:後輪
23R,23L:タイミングベルト
24R,24L:減速機
電気モータ25R,25L
26R,26L:ロータリエンコーダ
28:ケース
【技術分野】
【0001】
本発明は、路面に設けられた案内線条をカメラで撮影して画像認識によりカメラに対する案内線条の相対位置及び姿勢を検出しそれらに基づいて、車体が該案内線条に沿って走行するように自走運転機構を制御する自動運転車およびその運行システムに関する。
【背景技術】
【0002】
【特許文献1】特許第2902687号公報
【特許文献2】特開平11−231935号公報
【特許文献3】特開平 8−211936号公報。
【0003】
特許文献1には、AGV(Automatically Guided Vehicle)運行コマンドに応じてホストコンピュータがAGV運行ルート(運行スケジュール)を作成し、可視ナビゲーションシステムカメラでAGV位置を監視し、ワイヤレス赤外トランシーバを介してAGVに運行コマンドを与える自動案内車両制御が記載されている。特許文献2には、車両上のユーザがマップ入力により行き先を指定した後は、車両上のアンテナで車両位置を確認し、地上のコントローラとの無線通信により、該コントローラが自動走行制御をする、自動車両制御システムが記載されている。特許文献3には、移動経路に沿って張られた、交差点表示,運行内容指示等のマーカを、車両上の、前方マーカ検出カメラと直下マーカ認識カメラで撮影して、前方マーカ検出カメラで撮影したマーカの位置に基づいてステアリングし、マーカ認識カメラで撮影したマーカ標識に基づいて交差点,運行内容指示を解読する自動運転車が記載されている。
【発明の開示】
【発明が解決しようとする課題】
【0004】
従来、自動運転車例えば無人搬送車の経路誘導方式としては、路面に貼着した磁気テープによる誘導、光学反射テープ又は塗膜による誘導が主であり、これらの方式においては、工場内のレイアウト変更や工程順路の変更に伴って走行経路を変更する毎に、磁気テープあるいは光学反射テープを再配設する手間が大きく、かつ多額の費用が発生する問題がある。
【0005】
また、運行管理システムとしては、コース上の分岐を左右どちらに曲がるか、あるいはどの駅に停車するかは、無人搬送車側で予め一意に決めている運行管理が主であり、走行経路変更や行程順序の変更に伴い、無人搬送車側の制御プログラムも変更する手間が発生する問題がある。
【0006】
また、カメラ画像内の特徴物を検知して走行する方式では、反射光により本来黒である画像を白と誤認識する可能性が非常に高くなることや床面の汚れがあると、即走行ミスに繋がる問題がある。また、無人搬送車の走行位置を確認する手段はなく、走行位置確認に無線LAN(TCP/IP)を使用するシステムもない。
【0007】
また、交差点管理としては、ラジコン無線機等の信号機をコース上に設置し、無人搬送車側にもラジコン無線機を搭載して行う等、物理的な設置・スペースが必要となる為、これも走行経路変更に伴う手間が問題となる。また、交差点管理を無線LAN(TCP/IP)で行うシステムもない。また走行中、最も近くにあるアクセスポイントに接続を切り替えながら走行する無人搬送車も存在していない。また、無人搬送車の運行に必要な物(制御プログラム・運行予定表・AP切替表)をサーバPCからダウンロードする無人搬送車はなかった。
【0008】
本発明は、運行経路を自動走行するためのアルゴリズムが簡易で使いやすい自動運転車を提供することを第1の目的とし、走行経路の設定,変更が容易でシステム設定,維持及び管理が容易な自動運転車運行システムを提供することを第2の目的とする。自動運転車の運行エラーを防止することを第3の目的とし、交差点への複数の自動運転車の競合進入を防止することを第4の目的とする。
【課題を解決するための手段】
【0009】
(1)自走機構(22〜27)を備える車体(2);
該車体の走行方向直前の路面上の案内線条(1)する撮影装置(4);
該撮影装置が撮影した画面の案内線条像の位置および姿勢を検出する線条像検出手段(9);
前記位置および姿勢に対応して、前記案内線条に沿って走行するように前記自走機構を操作する運転手段(9,29);
前記案内線条に付加されたコード標識の前記画面上の像すなわちコード標識像を認識して該コード標識像が表す識別コードを検出する標識検出手段(9);および、
運行経路上の通行点及び分岐点を識別コードで表しそこでの運行指示(アクション)を該識別コードに付した地点情報(セル内データ)の群でなる運行予定表(Excelのbook)を保持し、前記標識検出手段が検出した識別コードを前記運行予定表の識別コードと照合して、該識別コードに付された運行指示に従い、前記運転手段を制御する運転制御手段(9);
を備える自動運転車(AGV001)。
【0010】
なお、理解を容易にするために括弧内には、図面に示し後述する実施例の対応要素又は相当要素の符号又は対応事項を、例示として参考までに付記した。以下も同様である。
【発明の効果】
【0011】
案内線条(1)だけで運行経路を構成しているので、安価であり、また案内線条(1)の張替えだけで走行経路変更に柔軟に対応できる。さらに、運行予定表に基づいて走行するので、走行経路変更伴う自動運転車の運行制御プログラムを変更する必要がなく、運行予定表だけを変更するだけで走行経路変更に柔軟に対応できる。また、運行予定表に基づいて運行管理しているので、運行予定表の内容を書き換えることで、自動運転車の運行を自由自在に変更できる。
【0012】
(2)前記撮像装置は、前記車体の走行方向直前の路面を狙うカメラ,該カメラへの乱反射光の入射を制限する偏光レンズ、および、前記カメラの光軸が路面と交わる地点を照明する照明装置、を含む、上記(1)に記載の自動運転車。カメラに偏光レンズを付けているので、反射光が遮断され、標識コード検出の信頼性が高い。
【0013】
(3)前記線条像検出手段(9)は、前記撮影装置が撮影した画面上の像の中央位置,該画面の基準線に対する角度および面積を算出し、算出した面積が一定範囲にある像を案内線条像と決定し、該案内線条像の角度および中央値を運転制御命令に変換し(s15);前記運転手段(9,29)は該運転制御命令にしたがって前記自走機構(22〜27)を操作する;上記(1)又は(2)に記載の自動運転車。輪郭の中央値と角度から操舵等の運転制御命令を生成しているので、操舵制御を主とする運転制御を決定するアルゴリズムを簡単にできる。また、輪郭面積が一定範囲内にあるものだけを有効輪郭とするので、外乱光や床面の汚れによる輪郭誤検出による走行ミスが低減する。
【0014】
(4)前記コード標識は、番地有マークと数字標識(bit0〜bit5)から構成され、該番地有マークは、前記案内線条(1)と並んでおり、該番地有マークの後端の直後に前記数字標識があり;前記標識検出手段(9)は、前記撮影装置(4)が撮影した画面の番地有マーク像の後端の直後領域の数字標識(bit0〜bit5)を前記コード標識像と認識する;上記(1)乃至(3)のいずれか1つに記載の自動運転車。番地有マークを走行本線である案内線条(1)と並べているので、同一走行路を逆走する場合も走行経路上の数字標識(bit0〜bit5)を正しく認識できる。
【0015】
(5)前記自動運転車(AGV001)は、運行経路上の行先地点をユーザが入力する行先地点入力手段(9のキーボード)を備え;前記運転制御手段(9)は、行先地点をユーザが入力すると前記運転手段(9,29)による前記案内線条(1)に沿う走行を開始し、前記標識検出手段(9)が検出した識別コードが前記行先地点入力手段によって入力された行先地点を表す識別コードと合致すると、前記運転手段(9,29)による走行を停止する;上記(1)乃至(4)のいずれか1つに記載の自動運転車。
【0016】
(6)前記自動運転車(AGV001)は、前記運行予定表を作成し保持するサーバ(31)と無線通信する通信手段(無線LAN)を備え;運転制御手段(9)は、該通信手段を介して前記サーバ(31)から前記運行予定表を入手し保持する;上記(1)乃至(5)のいずれか1つに記載の自動運転車。自動運転車の運行に必要な運行予定表をサーバ(31)からダウンロードしてから使用するようにしているので、サーバ(31)に置かれている運行予定表を更新するだけでよく、各自動運転車無毎に運行予定表を更新する手間を省くことができる。
【0017】
(7)前記運転制御手段(9)は、前記標識検出手段(9)が検出した識別コードが交差点入口であると、前記通信手段を介して前記サーバ(31)に該交差点入口の閉鎖中情報(交差点番号ファイルのLock)があるかを検索し、ないと前記サーバ(31)に該交差点入口の閉鎖中情報(交差点番号ファイルのLock)を作成し該交差点入口を通過し、あった場合には、そこで走行を停止し、交差点入口停止中情報(交差点入口停止中Flag ON)を生成する;上記(6)に記載の自動運転車。
【0018】
(8)前記運転制御手段(9)は、前記交差点入口を通過し前記標識検出手段(9)が検出した識別コードが交差点出口であると、前記サーバ(31)の該交差点入口の閉鎖中情報を消去(交差点番号ファイルをun lock)し、一方、交差点入口停止中情報(交差点入口停止中Flag ON)を生成したときはその後前記交差点入口の閉鎖中情報が消えると該交差点入口の閉鎖中情報を作成し該交差点入口を通過する;上記(7)に記載の自動運転車。
【0019】
(9)前記運転制御手段(9)は、動作電源が印加された直後に自車宛てファイル(AGV001ファイル)を前記サーバ(31)に生成し、前記標識検出手段(9)が識別コードを検出するたびにそれを該自車宛てファイルに書込む;上記(7)又は(8)に記載の自動運転車。
【0020】
(10)路面上の案内線条(1)、および、該運行経路上の通行点及び分岐点において案内線条に付加された、各通行点又は分岐点を特定するコード標識、を含む運行経路上の、スタート点から行先地点に至る「行き経路」および該行先地点から前記スタート点に戻る「復帰経路」の通行点及び分岐点を識別コードで表しそこでの運行指示を識別コードに付した地点情報(セルのデータ)の群でなる運行予定表(Excelのbook)を、ユーザ入力に応じて作成し登録保持するコンピュータ、および、複数の自動運転車のそれぞれと選択的に無線通信する地上通信手段、を備えるサーバ(31);ならびに、
自走機構(22〜27)を備える車体(2),該車体の走行方向直前の路面上の案内線条(1)を撮影する撮影装置(4),該撮影装置が撮影した画面の案内線条像の位置および姿勢を検出する線条像検出手段(9),前記位置および姿勢に対応して、前記案内線条に沿って走行するように前記自走機構を操作する運転手段(9,29),前記画面の、案内線条に付加されたコード標識の前記画面上の像すなわちコード標識像を認識して該コード標識像が表す識別コードを検出する標識検出手段(9),前記サーバ(31)と無線通信する車上通信手段(無線LAN)、および、該車上通信手段を介して前記サーバ(31)から前記運行予定表を取得して保持し、前記標識検出手段(9)が検出したコード標識像が表す識別コードを前記運行予定表の識別コードと照合して、該識別コードに付された運行指示に従い、前記運転手段(9,29)を制御する運転制御手段(9)、をそれぞれが備える複数の自動運転車(AGV001〜AGV003);を含む自動運転車運行システム。
【0021】
(11)各自動運転車(AGV001〜AGV003)の前記運転制御手段(9)は、動作電源が印加された直後に前記サーバ(31)から前記運行予定表をダウンロードし、そして、自車宛てファイル(AGV00Xファイル;X=1〜3)を前記サーバ(3)に生成し、その後、前記標識検出手段(9)が識別コードを検出するたびにそれを該自車宛てファイルに書込む;上記(10)に記載の自動運転車運行システム。
【0022】
(12)前記運行予定表は、1つの行先地点を通行する1つの運行経路の前記地点情報群でなる運行予定の、行先地点が異なる複数を含み;前記自動運転車は、行先地点をユーザが入力する行先地点入力手段(ノートPC9のキーボード)を備え;前記運転制御手段(9)は、行先地点をユーザが入力すると前記運転手段(9,29)による前記案内線条(1)に沿う走行を開始し、前記標識検出手段(9)が検出した識別コードが、前記行先地点入力手段によって入力された行先地点の前記運行予定の中の該行先地点を表す識別コードと合致すると、前記運転手段による走行を停止する;上記(10)又は(11)に記載の自動運転車運行システム。
【0023】
(13)前記運転制御手段(9)は、前記標識検出手段(9)が検出した識別コードが交差点入口であると、該交差点宛の交差点識別ファイルが前記サーバ(31)に存在しないと該サーバに該交差点識別ファイルを生成して該ファイルをロックして該交差点入口を通過し、該交差点の出口で該ファイルをアンロックし、前記交差点識別ファイルが前記サーバ(31)に存在した場合には前記交差点識別ファイルがロックされていると走行を停止するがアンロックであると該ファイルをロックして該交差点入口を通過し、該交差点の出口で該ファイルをアンロックする;上記(10)乃至(12)のいずれか1つに記載の自動運転車運行システム。サーバ(31)と各自動運転車が1対多でTCP/IP無線接続して交差点管理をしているので、ラジコン無線機等の物理的な設置・スペースが不要となる。また、最も普及しているTCP/IP無線LANを使用しているので、システムの導入を容易し、付加価値の高いシステムを提供することができる。
【0024】
(14)前記サーバ(31)と各自動運転車(AGV001〜AGV003)との通信接続は、TCP/IP無線接続である;上記(10)乃至(13)のいずれか1つに記載の自動運転車運行システム。最も普及しているTCP/IP無線LANを使用しているので、システムの導入を容易にし、付加価値の高いシステムを提供することができる。サーバ(31)と各自動運転車が1対多でTCP/IP無線接続し、各無人搬送車の走行状況をサーバ(31)に通知できるので、サーバ(31)側で各自動運転車の走行状況を知ることができる。
【0025】
(15)前記運転制御手段(9)は、前記標識検出手段(9)が識別コードを検出する毎に、該識別コードを表すコード標識がある地点に最も近い無線アクセスポイントに、前記車上通信手段の接続を切換える(s42);上記(14)に記載の自動運転車運行システム。
【発明を実施するための最良の形態】
【0026】
本発明の他の目的及び特徴は、図面を参照した以下の実施例の説明より明らかになろう。
【実施例1】
【0027】
図1に、本発明の一実施例の自動運転車である、牽引車仕様の無人搬送車AGV001を示す。AGV001は、案内線条の1態様である、黄緑色路面に貼付けられた黒ビニールテープ1、に沿って自動走行する。AGV001の車体2には、バッテリ収納ケース3があり、その内部に電気モータに給電するバッテリ(蓄電池)が入っている。ケース3には、車体2の直前の路面を撮影する撮影装置4が、その視野中心線の対路面角度を35度にして、設置されている。また、撮影装置4の視野中心線が路面と交わる位置を照明装置5が照明する。照明装置5の光源は蛍光灯である。
【0028】
撮影装置4には、USBカメラと偏光レンズがある。偏光レンズは、USBカメラのレンズの前に装着してあり、路面および黒ビニールテープ1の表面反射光(照返し)を遮断し、撮影画面のハレーションやハイライトを抑止する。
【0029】
照明装置5の下には、超音波方式の障害物センサ6が車体前方に向けて設置されている。この障害物センサ6が障害物(人,物体)を検知したときは、車体2を走行駆動する電気モータの駆動が停止され、ロータの回転がロックされる。この状態が、障害物センサ6が障害物を検出しなくなるまで継続する。
【0030】
車体には、衝突時の衝撃吸収用の弾力材を被覆した、防護柵でもあるパイプフレーム7が備わっており、該フレーム7に固着した台板8に、ノートパソコン(ノートPC)9が固定されている。また、フレーム7には、ワンタッチボタン方式の、走行開始指示用および緊急停止解除(走行再開指示)用のスタートスイッチ10および緊急停止用のストップスイッチ11を装備している。ユーザがスタートスイッチ10を押すとAGV001は走行を開始する。車体が走行中にユーザがストップスイッチ11を押すと車体2は走行を停止し、その後スタートスイッチ10を押すと車体2が走行を再開する。
【0031】
パイプフレーム7の、ケース3背部の水平パイプ12には、牽引アーム13が水平パイプ12を中心に垂直回動可に結合している。牽引アーム13の自由端には、ボールジョイント(自在継手)を介して連結アーム14が連結しており、該連結アーム14に、牽引対象の台車あるいは荷車との係合具15,16が備わっている。
【0032】
図2に、車体2の下面を示す。図2は、図1に示す車体2の下面を下から見上げた平面図である。車体2には、前輪21および後輪22R,22Lがある。前車輪21は、車軸を中心に車輪が自由回転し、しかも車軸支持枠が垂直軸を中心に回動可のキャスタである。後輪22Rおよび22Lはそれぞれ、タイミングベルト23R,23Lおよび減速機24R,24Lを介して電気モータ25R,25Lで回転駆動される。電気モータ25Rおよび25Lにはそれぞれロータリエンコーダ26Rおよび26Lが結合しており、電気モータ25R,25Lのロータの回転速度に周波数が比例する電気信号(指速パルス)を発生する。電気モータ25R,25Lを回転駆動するモータドライバ27R,27Lは、ケース28の内部にあって電気モータ25R,25Lに給電する。
【0033】
図3に、車体3上の電装系統の構成を示す。マイコン29は、CPU,RAM,ROMなどのコンピュータ機能要素を主体とするマイクロコンピュータであり、これに、図3に示すように、モータドライバ27R,27L他が接続されている。マイコン29は、ケース28(図2)内にあって、シリアルインターフェース(I/F)30を介して、ノートPC9(図1)と接続されている。図1に示す撮像装置4のUSBカメラは、ノートPC9のUSBポートに接続されている。ノートPC9には無線LANが備わっており、地上の、パソコン(PC)であるサーバ31に接続したAP(アクセスポイント)と無線接続できる。すなわちサーバ31と無線による通信をすることができる。本実施例では、2箇所にアクセスポイントAP1,AP2(図4)を設けている。
【0034】
AGV001上のノートPC9は、路面上の黒ビニールテープ1に沿って倣い走行するための運転制御命令を生成してマイコン29に与えると共に、路面のコード標識を検出してコード標識に対応付けられている運行指示(アクション;右折,左折,直進,停止,・・・)を解読して運行指示対応の運転制御命令を生成してマイコン29に与える。運転制御命令には、スタート,直進,低速,高速,右操舵,左操舵および停止がある。マイコン29は、低速/高速指示に応じて電気モータ25R,Lによる車輪22R,Lの駆動速度を、低速/高速とする。モータドライバ27R,27Lが、マイコン29が与える指示速度を目標速度とし、ロータリエンコーダ26R,26Lが発生する指速パルスの周波数(検出速度)をフィードバック速度値として、フィードバック速度値が目標速度となるように、モータ22R,22Lの回転速度を制御する。
【0035】
マイコン29は、右操舵指示に応じて、左車輪22Lの回転駆動を継続したまま右車輪22Rの回転駆動を停止し、左操舵指示があると、右車輪22Rの回転駆動を継続したまま左車輪22Lの回転駆動を停止する。
【0036】
図4に、黒ビニールテープ1を床面に貼り付けて構成した運行経路の1例を、単純化して示す。この例は、番地30をスタートかつゴール点に定め、AGVの走行は反時計廻りと定め、この走行方向に関して、引込線の入り口ならびに荷物運搬における荷積点および荷卸点に番地および駅番号を定め、分岐点,交差点入り口および交差点出口に番地を定めたものである。これら、番地を定めた地点(四角ブロック位置)には、該番地を表現する識別コードを表すコード標識が、同じく路面に対する黒ビニールテープの貼着により、設けられている。この運行経路は、複数の、同一構造および同一機能の無人搬送車(AGV001〜AGV003)を同時に運行させるものである。
【0037】
サーバ31には、Unix(登録商標)のNFS(Network File System)機構を利用した、共有フォルダ(/robot)が作成されており、該共有フォルダに、AGV制御プログラム(/robot/agv.soft),運行予定表(/robot/DRIVE_PLAN)およびAP切替表(/robot/AP_PLAN)が格納されている。AP切替表は、番地に近いAP(アクセスポイント)を番地宛に定めた参照表(LUT:ルックアップテーブル)である。
【0038】
AGV制御プログラム(/robot/agv.soft)には、AGV運転アプリケーション,所在認識アプリケーション,交差点管理アプリケーション,運行予定表管理ファイル(/robot/DRIVE_PLAN) ,AP切替表管理ファイル(/robot/AP_PLAN)が組み込まれている。運行予定表(/robot/DRIVE_PLAN)は、表計算ソフトであるExcelによって作成されたbook(表)である。表1aに、図4に示す運行経路に適用する運行予定表の一例を示す。
【0039】
【表1】
【0040】
運行予定表の駅番号は、Exselのbook(表)の行番号であり、各駅番号(各行)は1つの運行予定を表し、それぞれスタート点から出発して一方向に走行してスタート点に戻るループ経路上の駅(通行点),引込点および交差点、すなわち節点(ノード)に、走行方向の並び順で、book(表)上の同一行上の各セル(データ入力升目)を、book(表)上左側のものから順番に割り当て、各セルに対応点の地点情報を入力したものである。しかも、行番号位置の駅番号は、該行番号の各セルの地点情報が表す地点(上記駅など)を順次に通行する1つの運行予定(ルート)での、行先地点(目的地点,到達地点:到達すると停止する地点)を意味する。各セルには、CSV(Comma Separated Value)方式で地点情報が入力されている。
【0041】
該地点情報は、本実施例では、番地,地点種別,およびアクション(運行指示)を含み、番地は十進数で、地点種別およびアクションはアルファベットで表している。地点種別およびアクションを表すアルファベットを、表1a上に、運行予定表に付加して示した。また、運行予定表の第1行の駅番号1の運行予定の、各地点情報(各セルのデータ)が意味する内容を、表1bに示した。なお、本実施例では、スタート点とゴールG(復帰点)とは同一地点である。
【0042】
図1および図4に示す、路面に貼った黒ビニールテープ1および上記コード標識は、市販の幅19mmの黒ビニールテープである。撮像装置4のUSBカメラが撮影した画面(横160dot、縦120dot)は、撮像装置4からの水平距離が15cmの路面上の横方向22cmを短辺とし、そこからさらに前方25cmの路面上の横方向33cmを長辺とする台形領域の画像を表す。
【0043】
AGV001上のノートPC9は、PC上で実行する画像処理ライブラリを用いて、カメラが撮影した画面上の黒ビニールテープの輪郭を抽出する。次に、輪郭の面積,中央値および角度(画面の縦軸に対する傾斜角度)を算出する。例えば、図5の(a)に示すように、輪郭が7つの線分から構成されているものとする。x:横方向、y:縦方向とする。各線分の座標は(75,10),(69,59),(76,88),(72,106),(84,8),(86,85),(80,115)である。
【0044】
中央値x=(x最大値+x最小値+1)/2=(86+69+1)/2=78
中央値y=(y最大値+y最小値+1)/2=(115+8+1)/2=62
atan((y最大値−y最小値+1)/(x最大値−x最小値+1))
=atan((115−8+1)/(86−69+1))=約81度
真上を0度基準としているので、90−81=9度、また角度は、左右の向きも反映する必要があるので、
「xが最小値をとる時のy<xが最大値をとる時のy」であれば、左向き(―符号)、
「xが最小値をとる時のy>=xが最大値をとる時のy」であれば、右向き(+符号)、
とする。上記7つの座標であれば、xが最小値をとる時のy=59、xが最大値をとる時のy=85なので角度=−9度、となる。
【0045】
面積は、画像処理ライブラリ側が求めたものをそのまま使用する。結果として、
中央値:(78,62),角度:(−9),面積(1500)
が算出されたとする。有効なテープ輪郭条件として、面積が950(19mmx50mm)〜5700(19mmx300mm)の輪郭に制限する。すなわち、面積が950〜5700mm以内の輪郭を有効とする。これは、床面の汚れを輪郭と誤検知することを防止する為に、950mm未満の輪郭はテープ輪郭と見なさず、5700mmを超える輪郭もテープ輪郭とみなさないことを意味する。
【0046】
次に、中央値と角度から車体2の運転条件を次のように決定する:
中央値のx座標値が、60≦x≦100ならば、直進、
x<60 ならば、左操舵、
100<x ならば、右操舵、
角度が、20度未満 ならば 直進、
―20度以上 ならば 左操舵、
+20度以上 ならば 右操舵、
最終的な操舵方向は、中央値と角度の相関関係より決定する。
【0047】
例えば図5の(b)に示す「右操舵しすぎ」のように、角度(45度)だけで最終操舵を決定すると、さらに右操舵を継続することになり、テープがカメラ視野から消えてしまうので、図5の(b)に示す中央値(35,25)、角度(45度)の場合は、中央値を採用し左操舵とする。つまり、常にテープ輪郭がカメラ画面の中央付近に来るように、中央値と角度の相関関係により、最終的な操舵方向を決定する。これは人が車の運転をする時と同じような制御である。
【0048】
次に、路面上のコード標識が表す識別コードの検出を、説明する。識別コードのコード標識は、図5の(c)に示す、案内線条である黒ビニールテープ1の左右に分布する6本の領域に定め、その直前に「番地有マーク」を付加して、コード標識があることを示す。6本のそれぞれは、図5の(c)に示すように、6ビットデータの各ビットに宛てられており、標識となる黒ビニールテープがあるとビット「1」、ないとビット「0」である。
【0049】
案内線条である黒ビニールテープ1の、画面上の像を本線というと、本線の右側に輪郭間角度差20度未満かつ長さ20cm以上の輪郭を検出すると「番地有マーク」と判断し、シャッターチャンスを待つ。シャッターチャンスとは、平行線(本線と番地有マーク)が2本から1本になった時の画面にコード標識が全て入っていることになっており、シャッターチャンスとは、このタイミングを意味する。シャッターチャンスでの撮影画面から輪郭を抽出すると本線を含めて最大7個の輪郭(本線とコード標識)が検出される。
【0050】
本線輪郭の中央値をM(x,y)、第1数字輪郭(コード標識)の中央値をS1(x,y)、第2数字輪郭の中央値をS2(x,y)、第3数字輪郭の中央値をS3(x,y)、第4数字輪郭の中央値をS4(x,y)、第5数字輪郭の中央値をS5(x,y)、第6数字輪郭の中央値をS6(x,y)、とする。bit0〜bit5の数字輪郭作成ルールは、シャッターチャンスから5cm等間隔でコード標識用の黒ビニールテープを配置する事になっているので、検知された中央値S1〜S6が次の表のどこに存在しているか否かで、各bitの「1」が存在するかを検出する。
【0051】
本線輪郭の左右 輪郭のY座標値
(M(x)の左右)
bit0 右 0≦y≦39 ならば 1
bit1 右 40≦y≦79 ならば 1
bit2 右 80≦y≦119 ならば 1
bit3 左 0≦y≦39 ならば 1
bit4 左 40≦y≦79 ならば 1
bit5 左 80≦y≦119 ならば 1
路面上のゴミを数字輪郭と誤検知することを防止したい時は、面積(100以上200mm2未満)や角度(60度以上)の制限を入れてもよい。図5の(c)の例では、
bit0 bit1 bit2 bit3 bit4 bit5
1 1 1 1 1 1
であり、16進数では3F、10進数では63となる。
【0052】
図8〜図10に、AGV001のノートPC9の、運行制御の概要を示す。これらの図面の、以下の説明に対応する処理ブロックの符号(sつき数値)を、以下の文章に括弧付きで挿入した。
【0053】
まず、無人搬送車AGV001のノートPC9に電源が投入され、ノートPC9のAGV運行アプリケーションが起動すると、ノートPC9は、図6の(a)に示すように、Unix(登録商標)のNFS(Network File System)機構を使用して、サーバ31側の「/robotフォルダ」と無人搬送車AGV001の「/robotフォルダ」を共有化する(s1)。他の同一構成,同一機能の無人搬送車AGV002,AGV003も同様である。これにより、サーバ31と複数の無人搬送車AGV001〜AGV003との、1対多の無線接続用の共有が構成される。
【0054】
次に、ノートPC9は、図7の(a)に示すように、サーバ31側にある/robot/agv.softと、/robot/DRIVE_PLANと、/robot/AP_PLANを、自機にダウンロードし(s2)、ノートPC9内のHDDに保存してから/robot/agv.softを実行する(s3)。次に、サーバ31に、「/robot/AGV001ファイル」があるかをチェックし、無い時はサーバ31に、「/robot/AGV001ファイル」を作成する(s4)。
【0055】
その後ユーザが、AGV001のノートPC9にキーボードから行先駅番号を入力し、スタートスイッチ10を押下する。これに応答してノートPC9は、運行予定表(表1a)上の、入力があった行先駅番号(行番号)の運行予定を特定して、AGV001の走行を開始する(s5,s6,s7)。ここで、行先駅3(行番号3)が入力されたものとし、そのときAGV001は、図4のスタート地点(番地30)(正確にはその直後)にあったものとする。行先駅3(行番号3)が入力されたとき、ノートPC9のディスプレイの表示は、図7の(b)の左側に示すものから、右側に示すものに切換る。
【0056】
走行を開始した後、ステップs8以降の、撮影装置4による路面画像の撮影(s8),画像認識による、本線(黒ビニールテープ1)の検出と運転制御命令の生成(s11〜s15),識別コード(番地)の検出(s14〜s16−s20−s21−s8〜s11−s22〜s41),検出した識別コード(番地)対応の地点情報の検索(s42,s43)、および、検索により抽出した地点情報に対応した運行制御(s42〜S59,s12)を、設定短周期で繰り返し実行し、検出した識別コード(番地)の地点情報の駅番号が行先駅番号に合致したときにはそこでAGV001の走行を停止し、ノートPC9のディスプレイの表示を駅番号入力画面(入力駅番号なし)にする。その後ユーザが駅番号未入力のままでスタートスイッチ10を押すと、AGV001は同方向の走行を開始し、スタート(ゴールG)地点に到達するとそこで停止する。
【0057】
より具体的に説明する。スタート地点(の直後)で走行を開始し、最初の識別コード(番地)14を検出すると、行先駅3(行番号3)の運行予定の第1セルのデータ(地点情報)が「14:SPL:1」であるので、そこは駅1である。ノートPC9は、行先駅は「3」であるので、そこではAGV001を停止せず、サーバ31の「AGV001ファイル」(前記「/robot/AGV001ファイル」;以下同様に表現する)に14と書込む(s41)。そして、「AP切替表」の番地14に対応するAP「00:12:3E:6C:D8:98」を参照して、ノートPC9の無線LANの接続先APを「00:12:3E:6C:D8:98」に設定する。AP切替表の内容を図7の(c)に示す。このように、通行地点対応でAPアドレスを切換えることにより、識別コードを表すコード標識がある地点に最も近い無線アクセスポイントに、ノートPC9の無線LAN接続が切換えられる。
【0058】
しかし、行先駅は3なので、番地14の地点情報の中のアクション(SPL)は実行せず、そのまま進む。次に、番地20を読むとそこの地点情報が「20:R」なので、分岐を発見したら右へ行く。そして、サーバ31の「AGV001ファイル」に20と書込む。そして、「AP切替表」(図7の(b))の番地20に対応するAPは「00:12:3E:6C:D8:98」なので、ノートPC9の無線LANの接続先APを00:12:3E:6C:D8:98に設定する。そのまま直進すると分岐がある。ここで、輪郭が2つあり、かつ輪郭間角度差が20度以上あると分岐と認識する(s14−s16〜s20)。分岐を表すテープは本線1と重ならないように作成してある。中央値が右側寄りの線路を選択して走行する。
【0059】
次に、番地15を読むとその地点情報が「15:S:2」なので、駅2である。そこで、サーバ31の「AGV001ファイル」に15と書込む。そして、「AP切替表」の番地15対応のAP「00:12:3E:6C:D8:98」に、ノートPC9の無線LANの接続先を設定する。しかし、行先駅は3なので、番地15のアクションは何もせず、そのまま進む。
【0060】
次に、番地16を読むとその地点情報が「16:S:3」なので、駅3である。サーバ31の「AGV001ファイル」に16と書込む。そして、「AP切替表」の、番地16に対応するAP「00:12:3E:6C:D8:ED」に、ノートPC9の無線LANの接続先を設定する。行先駅は3なので、番地16のアクションを実行する。つまり、停車し、ノートPC9のディスプレイの表示を駅番号入力画面にする(s57,s58,s5)。
【0061】
駅3の作業員は、例えば、AGV001が牽引している台車上の荷物を降ろし、あるいは、牽引している台車に荷物を載せる。そして、次に、駅番号未入力のままでスタートスッチ11を押すと、ノートPC9は以前と同方向の走行(復帰走行)を開始する。なお、駅番号の入力がない状態でのスタートスイッチ10の押下は、スタート地点(ゴールG)への復帰指示である。
【0062】
この復帰走行中に、番地11を読むとその地点情報が「11:JI:80」なので、そこは、交差点入口で交差点番号は80である。サーバ31の「AGV001ファイル」に11と書込む。そして、「AP切替表」の、番地11に対応するAP「00:12:3E:6C:D8:ED」に、ノートPC9の無線LANの接続先APを設定する。
【0063】
交差点番号は80なので、サーバ31に「/robot/J080ファイル」があるかをチェックし、なければ作成する(s51,s52;図6の(c))。次に、Unix(登録商標)のファイルlock/unlock機構を利用して、/robot/J080ファイルをlockする。lock成功(ファイル使用可)できたら、そのまま交差点に進入する(s53)。lock失敗(ファイル使用不可)した時(別のAGVが/robot/J080をlock済の場合)は停止し、lock成功できるまで交差点入口で停止する(s54,s12,s53)。
【0064】
lock成功(ファイル使用可)でき、交差点に進入し、そして番地12を検出すると、その地点情報が「12:JO:80」なので、そこは交差点出口で交差点番号は80である。ここでサーバ31の「AGV001ファイル」に12と書込む。そして、「AP切替表」の、番地12に対応するAP「00:12:3E:6C:D8:ED」に、ノートPC9の無線LANの接続先を設定する。交差点番号は80なので「/robot/J080ファイル」をunlockする(s55,s56;図6の(c))。
【0065】
次に、番地30を検出すると、その地点情報は「30:G」なので、ゴール(スタート点)である。「AP切替表」の、番地30に対応するAP「00:12:3E:6C:D8:98」に、ノートPC9の無線LANの接続先を設定する。そして番地30のアクションを実行する。つまり、ゴールなので、停車し、ノートPC9のディスプレイの表示を、駅番号入力画面にする(s59,s5)。
【0066】
以上が、図4に示す、駅3(番地16)を通行するループ状経路(ルート)を、スタート(ゴール)地点の直後から出発して反時計回りに走行し、行先(目標)の駅3(番地16)で停止し、そしてユーザの復帰指示入力(駅番号入力なしのスタートスイッチ10押下)があると同方向の走行を再開してスタート(ゴール)地点の直後に戻って停止する、コース一周の運転制御である。
【0067】
以上のように、上述の自動運転車運行システムでは、運行経路の案内線条に、市販の片面粘着テープを用いているので、運行経路を安価に構成することができる。テープの張替えだけで走行経路変更に柔軟に対応でき、経路変更を簡単かつ安価に実施できる。上述の、自動運転車の1実施態様である無人搬送車AGV001は、コース上の数字を発見すると運行予定表からその数字に対するアクションを読んでそのアクション通りの動作をすることで、運行予定表に基づいた運行を行う。運行予定表に基づいた運行をするので、例えば、運行予定表の番地アクションを全て“−”(何もしない)に定義すると、グルグル回周する動きに変えることができる。このように、運行予定表の内容を変えることで、各種運行動作を行わせることができる。
【0068】
また、「運行予定表」で使える使用可能アクションに新しいアクションを定義することで、AGVに対して、いろいろな動作をさせることも可能なシステムになっている。例えば、Uターンを表す「U」を加えて、Uターンを行うようにすることができる。また、駅を表す「S:1」を「S:1:10:30」のように時刻情報「10:30」を追加定義して、駅出発時刻を指定することができ電車のようなダイヤ管理を行うことも可能である。
【0069】
また本実施例では、サーバ31の「AGV001ファイル」に、AGV001が路面から読み取った識別コードの番地を書くことでAGV001の走行位置がわかるようになっているが、番地以外の情報(指定された駅番号、ステータス(停止中,エラー発生中)、駅停止累計時間etc.)を書けば、より一層無人搬送車の状況を知ることが可能となる。サーバ31側で無人搬送車の走行状況を表示することも可能である。あるいは、他のPCからサーバ31にアクセスして、無人搬送車の走行状況を取得し表示することも可能である。
【0070】
なお、図5の(d)に示すように本線1の両側に番地有マークが2本ある時は、「強制停止」の意味を持たせることも可能である。この「強制停止」は、運行予定表に組み込む必要はない。また本実施例では、カメラに偏光レンズを付けることで路面および標識表面の高輝度反射光を遮断しているが、カメラ視野エリアを囲んでやれば、偏光レンズは不要となり、全ての外乱光をシャットアウトする事も可能である。更には、本実施例では黒ビニールテープを路面に貼着して案内線条としているが、その色は、撮像装置4が路面(背景)から明確に識別できる色であれば、黒に限らない。また、案内線条として、テープ状の塗装をすることも出来る。
【図面の簡単な説明】
【0071】
【図1】本発明の一実施例である無人搬送車AGV001の外観を示す斜視図である。
【図2】図1に示す車体2の下面を下から見上げた平面図である。
【図3】図1に示す無人搬送車AGV001の電気要素の概要を示すブロック図である。
【図4】図1に示す無人搬送車AGV001が運行する経路を示す平面図である。
【図5】(a)は、図1に示す撮影装置4の撮影画面上のテープ像から抽出した輪郭を示す平面図、(b)は無人搬送車AGV001の操舵が過剰なときの撮影画面上のテープ像位置を示す平面図、(c)は、案内線条である黒ビニールテープ1に付加されたコード標識を示す平面図、(d)は、強制停止を表す標識を示す平面図である。
【図6】(a)は、図4に示す運行経路の一台のサーバ31に対して、3台の無人搬送車AGVが無線通信によりサーバ31の共有フォルダにアクセスする1対多の接続態様を示すブロック図、(b)は、各無人搬送車AGVがサーバ31に自機宛てのAGVファイルを生成することを表すブロック図、(c)は、無人搬送車AGVが交差点入口に到達してから交差点出口を出るまでの、無人搬送車AGVの、サーバ31に対する行動を表すブロック図である。
【図7】(a)は、無人搬送車AGV001のノートPC9に電源が投入された直後に、ノートPC9がサーバ31から運行制御ソフト(アプリケーションプログラム等)をダウンロードする態様を示すブロック図、(b)は、ノートPC9のディスプレイに表示する、行先駅(ルート番号と同じ)入力画面と、入力済画面とを示す平面図、(c)は、ノートPC9が地点番地に最も近い無線アクセスポイントに接続するための、AP切替表の内容を示すブロック図である。
【図8】無人搬送車AGV001のノートPC9が実行する運行制御の概要の一部を示すフローチャートである。
【図9】ノートPC9が実行する運行制御の概要の他一部を示すフローチャートである。
【図10】ノートPC9が実行する運行制御の概要の残部を示すフローチャートである。
【符号の説明】
【0072】
AGV001:無人搬送車
1:黒ビニールテープ
2:車体
3:ケース
4:撮影装置
5:照明装置
6:障害物センサ
7:パイプフレーム
8:台板
9:ノートPC
10:スタートスイッチ
11:ストップスイッチ
12:水平パイプ
13:牽引アーム
14:連結アーム
15,16:係合具
21:前輪
22R,22L:後輪
23R,23L:タイミングベルト
24R,24L:減速機
電気モータ25R,25L
26R,26L:ロータリエンコーダ
28:ケース
【特許請求の範囲】
【請求項1】
自走機構を備える車体;
該車体の走行方向直前の路面上の案内線条を撮影する撮影装置;
該撮影装置が撮影した画面の案内線条像の位置および姿勢を検出する線条像検出手段;
前記位置および姿勢に対応して、前記案内線条に沿って走行するように前記自走機構を操作する運転手段;
前記案内線条に付加されたコード標識の前記画面上の像すなわちコード標識像を認識して該コード標識像が表す識別コードを検出する標識検出手段;および、
運行経路上の通行点及び分岐点を識別コードで表しそこでの運行指示を該識別コードに付した地点情報の群でなる運行予定表を保持し、前記標識検出手段が検出した識別コードを前記運行予定表の識別コードと照合して、該識別コードに付された運行指示に従い、前記運転手段を制御する運転制御手段;
を備える自動運転車。
【請求項2】
前記撮像装置は、前記車体の走行方向直前の路面を狙うカメラ,該カメラへの乱反射光の入射を制限する偏光レンズ、および、前記カメラの光軸が路面と交わる地点を照明する照明装置、を含む、請求項1に記載の自動運転車。
【請求項3】
前記線条像検出手段は、前記撮影装置が撮影した画面上の像の中央位置,該画面の基準線に対する角度および面積を算出し、算出した面積が一定範囲にある像を案内線条像と決定し、該案内線条像の角度および中央値を運転制御命令に変換し;前記運転手段は該運転制御命令にしたがって前記自走機構を操作する;請求項1又は2に記載の自動運転車。
【請求項4】
前記コード標識は、番地有マークと数字標識から構成され、該番地有マークは、前記案内線条と並んでおり、該番地有マークの後端の直後に前記数字標識があり;前記標識検出手段は、前記撮影装置が撮影した画面の番地有マーク像の後端の直後領域の数字標識を前記コード標識像と認識する;請求項1乃至3のいずれか1つに記載の自動運転車。
【請求項5】
前記自動運転車は、運行経路上の行先地点をユーザが入力する行先地点入力手段を備え;前記運転制御手段は、行先地点をユーザが入力すると前記運転手段による前記案内線条に沿う走行を開始し、前記標識検出手段が検出した識別コードが前記行先地点入力手段によって入力された行先地点を表す識別コードと合致すると、前記運転手段による走行を停止する;請求項1乃至4のいずれか1つに記載の自動運転車。
【請求項6】
前記自動運転車は、前記運行予定表を作成し保持するサーバと無線通信する通信手段を備え;運転制御手段は、該通信手段を介して前記サーバから前記運行予定表を入手し保持する;請求項1乃至5のいずれか1つに記載の自動運転車。
【請求項7】
前記運転制御手段は、前記標識検出手段が検出した識別コードが交差点入口であると、前記通信手段を介して前記サーバに該交差点入口の閉鎖中情報があるかを検索し、ないと前記サーバに該交差点入口の閉鎖中情報を作成し該交差点入口を通過し、あった場合には、そこで走行を停止し、交差点入口停止中情報を生成する;請求項6に記載の自動運転車。
【請求項8】
前記運転制御手段は、前記交差点入口を通過し前記標識検出手段が検出した識別コードが交差点出口であると、前記サーバの該交差点入口の閉鎖中情報を消去し、一方、交差点入口停止中情報を生成したときはその後前記交差点入口の閉鎖中情報が消えると該交差点入口の閉鎖中情報を作成し該交差点入口を通過する;請求項7に記載の自動運転車。
【請求項9】
前記運転制御手段は、動作電源が印加された直後に自車宛てファイルを前記サーバに生成し、前記標識検出手段が識別コードを検出するたびにそれを該自車宛てファイルに書込む;請求項7又は8に記載の自動運転車。
【請求項10】
路面上の案内線条、および、該運行経路上の通行点及び分岐点において案内線条に付加された、各通行点又は分岐点を特定するコード標識、を含む運行経路上の、スタート点から行先地点に至る「行き経路」および該行先地点から前記スタート点に戻る「復帰経路」の通行点及び分岐点を識別コードで表しそこでの運行指示を識別コードに付した地点情報の群でなる運行予定表を、ユーザ入力に応じて作成し登録保持するコンピュータ、および、複数の自動運転車のそれぞれと選択的に無線通信する地上通信手段、を備えるサーバ;ならびに、
自走機構を備える車体,該車体の走行方向直前の路面上の案内線条を撮影する撮影装置,該撮影装置が撮影した画面の案内線条像の位置および姿勢を検出する線条像検出手段,前記位置および姿勢に対応して、前記案内線条に沿って走行するように前記自走機構を操作する運転手段,前記画面の、案内線条に付加されたコード標識の前記画面上の像すなわちコード標識像を認識して該コード標識像が表す識別コードを検出する標識検出手段,前記サーバと無線通信する車上通信手段、および、該車上通信手段を介して前記サーバから前記運行予定表を取得して保持し、前記標識検出手段が検出したコード標識像が表す識別コードを前記運行予定表の識別コードと照合して、該識別コードに付された運行指示に従い、前記運転手段を制御する運転制御手段、をそれぞれが備える複数の自動運転車;を含む自動運転車運行システム。
【請求項11】
各自動運転車の前記運転制御手段は、動作電源が印加された直後に前記サーバから前記運行予定表をダウンロードし、そして、自車宛てファイルを前記サーバに生成し、その後、前記標識検出手段が識別コードを検出するたびにそれを該自車宛てファイルに書込む;請求項10に記載の自動運転車運行システム。
【請求項12】
前記運行予定表は、1つの行先地点を通行する1つの運行経路の前記地点情報群でなる運行予定の、行先地点が異なる複数を含み;前記自動運転車は、行先地点をユーザが入力する行先地点入力手段を備え;前記運転制御手段は、行先地点をユーザが入力すると前記運転手段による前記案内線条に沿う走行を開始し、前記標識検出手段が検出した識別コードが、前記行先地点入力手段によって入力された行先地点の前記運転予定の中の該行先地点を表す識別コードと合致すると、前記運転手段による走行を停止する;請求項10又は11に記載の自動運転車運行システム。
【請求項13】
前記運転制御手段は、前記標識検出手段が検出した識別コードが交差点入口であると、該交差点宛の交差点識別ファイルが前記サーバに存在しないと該サーバに該交差点識別ファイルを生成して該ファイルをロックして該交差点入口を通過し、該交差点の出口で該ファイルをアンロックし、前記交差点識別ファイルが前記サーバに存在した場合には前記交差点識別ファイルがロックされていると走行を停止するがアンロックであると該ファイルをロックして該交差点入口を通過し、該交差点の出口で該ファイルをアンロックする;請求項10乃至12のいずれか1つに記載の自動運転車運行システム。
【請求項14】
前記サーバと各自動運転車との通信接続は、TCP/IP無線接続である;請求項10乃至13のいずれか1つに記載の自動運転車運行システム。
【請求項15】
前記運転制御手段は、前記標識検出手段が識別コードを検出する毎に、該識別コードを表すコード標識がある地点に最も近い無線アクセスポイントに、前記車上通信手段の接続を切換える;請求項14に記載の自動運転車運行システム。
【請求項1】
自走機構を備える車体;
該車体の走行方向直前の路面上の案内線条を撮影する撮影装置;
該撮影装置が撮影した画面の案内線条像の位置および姿勢を検出する線条像検出手段;
前記位置および姿勢に対応して、前記案内線条に沿って走行するように前記自走機構を操作する運転手段;
前記案内線条に付加されたコード標識の前記画面上の像すなわちコード標識像を認識して該コード標識像が表す識別コードを検出する標識検出手段;および、
運行経路上の通行点及び分岐点を識別コードで表しそこでの運行指示を該識別コードに付した地点情報の群でなる運行予定表を保持し、前記標識検出手段が検出した識別コードを前記運行予定表の識別コードと照合して、該識別コードに付された運行指示に従い、前記運転手段を制御する運転制御手段;
を備える自動運転車。
【請求項2】
前記撮像装置は、前記車体の走行方向直前の路面を狙うカメラ,該カメラへの乱反射光の入射を制限する偏光レンズ、および、前記カメラの光軸が路面と交わる地点を照明する照明装置、を含む、請求項1に記載の自動運転車。
【請求項3】
前記線条像検出手段は、前記撮影装置が撮影した画面上の像の中央位置,該画面の基準線に対する角度および面積を算出し、算出した面積が一定範囲にある像を案内線条像と決定し、該案内線条像の角度および中央値を運転制御命令に変換し;前記運転手段は該運転制御命令にしたがって前記自走機構を操作する;請求項1又は2に記載の自動運転車。
【請求項4】
前記コード標識は、番地有マークと数字標識から構成され、該番地有マークは、前記案内線条と並んでおり、該番地有マークの後端の直後に前記数字標識があり;前記標識検出手段は、前記撮影装置が撮影した画面の番地有マーク像の後端の直後領域の数字標識を前記コード標識像と認識する;請求項1乃至3のいずれか1つに記載の自動運転車。
【請求項5】
前記自動運転車は、運行経路上の行先地点をユーザが入力する行先地点入力手段を備え;前記運転制御手段は、行先地点をユーザが入力すると前記運転手段による前記案内線条に沿う走行を開始し、前記標識検出手段が検出した識別コードが前記行先地点入力手段によって入力された行先地点を表す識別コードと合致すると、前記運転手段による走行を停止する;請求項1乃至4のいずれか1つに記載の自動運転車。
【請求項6】
前記自動運転車は、前記運行予定表を作成し保持するサーバと無線通信する通信手段を備え;運転制御手段は、該通信手段を介して前記サーバから前記運行予定表を入手し保持する;請求項1乃至5のいずれか1つに記載の自動運転車。
【請求項7】
前記運転制御手段は、前記標識検出手段が検出した識別コードが交差点入口であると、前記通信手段を介して前記サーバに該交差点入口の閉鎖中情報があるかを検索し、ないと前記サーバに該交差点入口の閉鎖中情報を作成し該交差点入口を通過し、あった場合には、そこで走行を停止し、交差点入口停止中情報を生成する;請求項6に記載の自動運転車。
【請求項8】
前記運転制御手段は、前記交差点入口を通過し前記標識検出手段が検出した識別コードが交差点出口であると、前記サーバの該交差点入口の閉鎖中情報を消去し、一方、交差点入口停止中情報を生成したときはその後前記交差点入口の閉鎖中情報が消えると該交差点入口の閉鎖中情報を作成し該交差点入口を通過する;請求項7に記載の自動運転車。
【請求項9】
前記運転制御手段は、動作電源が印加された直後に自車宛てファイルを前記サーバに生成し、前記標識検出手段が識別コードを検出するたびにそれを該自車宛てファイルに書込む;請求項7又は8に記載の自動運転車。
【請求項10】
路面上の案内線条、および、該運行経路上の通行点及び分岐点において案内線条に付加された、各通行点又は分岐点を特定するコード標識、を含む運行経路上の、スタート点から行先地点に至る「行き経路」および該行先地点から前記スタート点に戻る「復帰経路」の通行点及び分岐点を識別コードで表しそこでの運行指示を識別コードに付した地点情報の群でなる運行予定表を、ユーザ入力に応じて作成し登録保持するコンピュータ、および、複数の自動運転車のそれぞれと選択的に無線通信する地上通信手段、を備えるサーバ;ならびに、
自走機構を備える車体,該車体の走行方向直前の路面上の案内線条を撮影する撮影装置,該撮影装置が撮影した画面の案内線条像の位置および姿勢を検出する線条像検出手段,前記位置および姿勢に対応して、前記案内線条に沿って走行するように前記自走機構を操作する運転手段,前記画面の、案内線条に付加されたコード標識の前記画面上の像すなわちコード標識像を認識して該コード標識像が表す識別コードを検出する標識検出手段,前記サーバと無線通信する車上通信手段、および、該車上通信手段を介して前記サーバから前記運行予定表を取得して保持し、前記標識検出手段が検出したコード標識像が表す識別コードを前記運行予定表の識別コードと照合して、該識別コードに付された運行指示に従い、前記運転手段を制御する運転制御手段、をそれぞれが備える複数の自動運転車;を含む自動運転車運行システム。
【請求項11】
各自動運転車の前記運転制御手段は、動作電源が印加された直後に前記サーバから前記運行予定表をダウンロードし、そして、自車宛てファイルを前記サーバに生成し、その後、前記標識検出手段が識別コードを検出するたびにそれを該自車宛てファイルに書込む;請求項10に記載の自動運転車運行システム。
【請求項12】
前記運行予定表は、1つの行先地点を通行する1つの運行経路の前記地点情報群でなる運行予定の、行先地点が異なる複数を含み;前記自動運転車は、行先地点をユーザが入力する行先地点入力手段を備え;前記運転制御手段は、行先地点をユーザが入力すると前記運転手段による前記案内線条に沿う走行を開始し、前記標識検出手段が検出した識別コードが、前記行先地点入力手段によって入力された行先地点の前記運転予定の中の該行先地点を表す識別コードと合致すると、前記運転手段による走行を停止する;請求項10又は11に記載の自動運転車運行システム。
【請求項13】
前記運転制御手段は、前記標識検出手段が検出した識別コードが交差点入口であると、該交差点宛の交差点識別ファイルが前記サーバに存在しないと該サーバに該交差点識別ファイルを生成して該ファイルをロックして該交差点入口を通過し、該交差点の出口で該ファイルをアンロックし、前記交差点識別ファイルが前記サーバに存在した場合には前記交差点識別ファイルがロックされていると走行を停止するがアンロックであると該ファイルをロックして該交差点入口を通過し、該交差点の出口で該ファイルをアンロックする;請求項10乃至12のいずれか1つに記載の自動運転車運行システム。
【請求項14】
前記サーバと各自動運転車との通信接続は、TCP/IP無線接続である;請求項10乃至13のいずれか1つに記載の自動運転車運行システム。
【請求項15】
前記運転制御手段は、前記標識検出手段が識別コードを検出する毎に、該識別コードを表すコード標識がある地点に最も近い無線アクセスポイントに、前記車上通信手段の接続を切換える;請求項14に記載の自動運転車運行システム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2009−251922(P2009−251922A)
【公開日】平成21年10月29日(2009.10.29)
【国際特許分類】
【出願番号】特願2008−98816(P2008−98816)
【出願日】平成20年4月5日(2008.4.5)
【出願人】(000115751)リコーユニテクノ株式会社 (9)
【Fターム(参考)】
【公開日】平成21年10月29日(2009.10.29)
【国際特許分類】
【出願日】平成20年4月5日(2008.4.5)
【出願人】(000115751)リコーユニテクノ株式会社 (9)
【Fターム(参考)】
[ Back to top ]