
自動運転車両制御装置

【課題】自動運転から手動運転への自動での切り替えを可能とする自動運転車両制御装置を提供することを課題とする。
【解決手段】ドライバがオーバーライドした場合に自動運転から手動運転に切り替える自動運転車両を制御する自動運転車両制御装置1であって、自動運転の目標進路を生成する目標進路生成手段30と、自動運転の目標進路又はドライバによる運転操作に基づいて車両を制御する車両制御手段32と、実際の車両進路と自動運転の目標進路とを比較する進路比較手段31と、ドライバのオーバーライドを検出するオーバーライド検出手段12と、手動運転時に進路比較手段31で比較した進路の差が閾値未満でありかつオーバーライド検出手段12でドライバのオーバーライドが検出されていない場合に手動運転から自動運転に切り替える切替手段32とを備えることを特徴とする。
【解決手段】ドライバがオーバーライドした場合に自動運転から手動運転に切り替える自動運転車両を制御する自動運転車両制御装置1であって、自動運転の目標進路を生成する目標進路生成手段30と、自動運転の目標進路又はドライバによる運転操作に基づいて車両を制御する車両制御手段32と、実際の車両進路と自動運転の目標進路とを比較する進路比較手段31と、ドライバのオーバーライドを検出するオーバーライド検出手段12と、手動運転時に進路比較手段31で比較した進路の差が閾値未満でありかつオーバーライド検出手段12でドライバのオーバーライドが検出されていない場合に手動運転から自動運転に切り替える切替手段32とを備えることを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自動運転車両制御装置に関する。
【背景技術】
【0002】
自動運転車両は、通常、自動運転中にドライバが運転操作を行うと(すなわち、オーバーライドすると)、ドライバの運転操作に応じた手動運転に切り替わる。特許文献1には、自動運転可能走行区間から自動運転禁止区間へ移動する際に自動運転から手動運転へ円滑に切り替える方法が提案されており、ドライバの手動運転切り替え準備を確認するためにステアリングオーバーライド検出装置を利用しており、自動運転中にステアリングオーバーライドが検出されると自動運転制御を中止して手動運転に切り替わることが記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−276690号公報
【特許文献2】特開2010−149612号公報
【特許文献3】特開2008−162524号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の自動運転車両では、オーバーライドで自動運転から手動運転に切り替わった場合、手動運転から自動運転へ復帰する際はドライバ自身が切り替えを行わなければならない。そのため、ドライバは、オーバーライドを行う毎に、自動運転に復帰させたい場合には切り替え操作が必要となり、非常に煩わしい。
【0005】
そこで、本発明は、自動運転から手動運転への自動での切り替えを可能とする自動運転車両制御装置を提供することを課題とする。
【課題を解決するための手段】
【0006】
本発明に係る自動運転車両制御装置は、ドライバがオーバーライドした場合に自動運転から手動運転に切り替える自動運転車両を制御する自動運転車両制御装置であって、自動運転の目標進路を生成する目標進路生成手段と、目標進路生成手段で生成した自動運転の目標進路又はドライバによる運転操作に基づいて車両を制御する車両制御手段と、実際の車両進路と目標進路生成手段で生成した自動運転の目標進路とを比較する進路比較手段と、ドライバのオーバーライドを検出するオーバーライド検出手段と、手動運転時に進路比較手段で比較した進路の差が閾値未満でありかつオーバーライド検出手段でドライバのオーバーライドが検出されていない場合に手動運転から自動運転に切り替える切替手段とを備えることを特徴とする。
【0007】
この自動運転車両制御装置では、目標進路生成手段によって自動運転の目標進路を生成する。そして、自動運転車両制御装置では、自動運転時には車両制御手段によって自動運転の目標進路に沿って走行するように車両を制御し、手動運転時には車両制御手段によってドライバの運転操作に従って車両を制御する。特に、この自動運転車両制御装置では、進路比較手段によって実際の車両進路と自動運転の目標進路とを比較するとともに、オーバーライド検出手段によってドライバのオーバーライド(運転操作)を検出する。手動運転時に、自動運転制御装置では、切替手段によって進路比較手段での比較結果とオーバーライド検出手段で検出結果に基づいて進路の差が閾値未満かつオーバーライドが検出されていない場合には手動運転から自動運転に切り替える。このように、自動運転車両制御装置では、手動運転から自動運転に自動で切り替えることができ、ドライバ自身が切り替え操作を行う必要がない。手動運転から自動運転に切り替わるときには実際の車両進路と自動運転の目標進路との差が閾値未満となっているので、自動運転に切り替わっても車両が急な挙動(急加速、急減速、急操舵等)となることなく、スムーズに切り替わり、ドライバが違和感を受けない。
【0008】
なお、実際の車両進路や自動運転の目標進路は、車両の位置だけでなく、車両の速度、加速度、向き等の他の情報も含まれる。したがって、進路比較手段で進路を比較する場合には実際の車両進路と自動運転の目標進路とにそれぞれ含まれる各情報を比較し、各情報について差が閾値未満か否かをそれぞれ判定する。
【0009】
本発明の上記自動運転車両制御装置では、目標進路生成手段は、過去のオーバーライド時の情報と現在の車両情報及び周辺環境情報に基づいて自動運転の目標進路を生成すると好適である。
【0010】
この自動運転車両制御装置の目標進路生成手段では、目標進路を生成する際に、現在の車両情報及び周辺環境情報だけでなく、過去のオーバーライド時の情報(例えば、進路情報、車両情報、周辺環境情報)も加味して自動運転の目標進路を生成する。自動運転中にドライバがオーバーライドを行う場合、ドライバは自動運転による車両挙動に対して違和感(例えば、カーブ進入時に進入速度が高すぎる。障害物回避時に障害物までの距離が近すぎる。)を受けている。この違和感を解消するために、ドライバ自身が運転操作して車両挙動を変える(例えば、カーブ進入時に速度を低下させる。障害物回避時に自車両を障害物からより離れさせる。)このようなオーバーライド時の情報を利用することにより、そのドライバの望む車両挙動となるような目標進路を生成できる。このように、自動運転車両制御装置では、ドライバの過去のオーバーライド時の情報も加味して自動運転の目標進路を生成することにより、そのドライバの運転特性に合うように自動運転時の車両挙動が改善され、自動運転時の車両挙動に対するドライバの違和感を抑制できる。その結果、自動運転中にドライバがオーバーライドする回数が低減する。
【発明の効果】
【0011】
本発明によれば、手動運転から自動運転に自動で切り替えることができ、ドライバ自身が切り替え操作を行う必要がない。
【図面の簡単な説明】
【0012】
【図1】本実施の形態に係る自動運転車両制御装置の構成を示すブロック図である。
【図2】車両が走行するシーンの一例である。
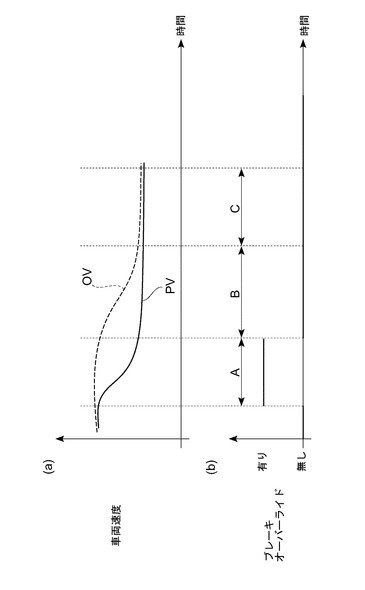
【図3】手動運転モードと自動運転モードとの切り替えが行われる場合の一例であり、(a)が目標進路と実車進路の車両速度の時間変化であり、(b)がブレーキオーバーライドの時間変化である。
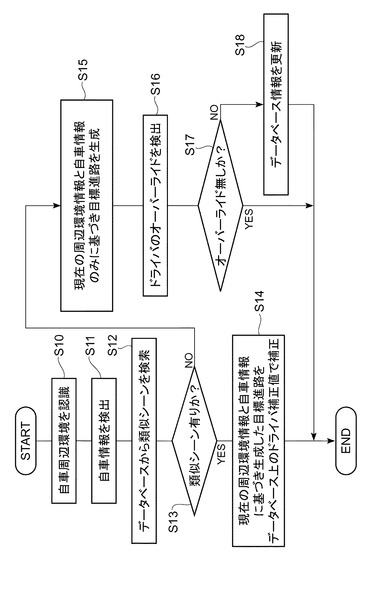
【図4】図1の自動運転車両制御装置における目標進路生成の動作の流れを示すフローチャートである。
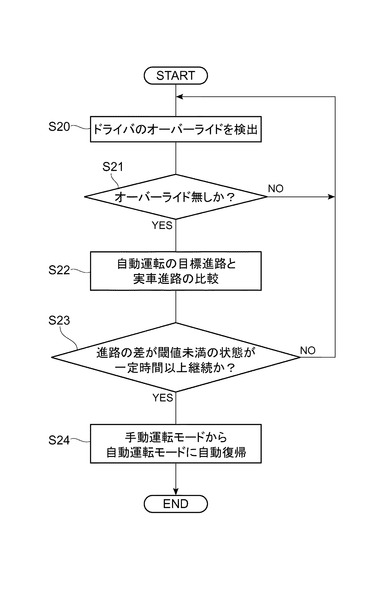
【図5】図1の自動運転車両制御装置における運転モード切替の動作の流れを示すフローチャートである。
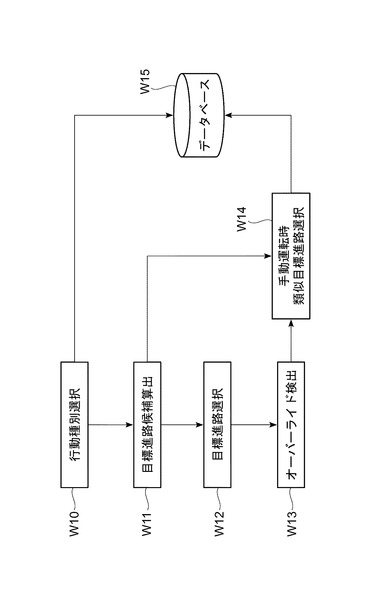
【図6】本実施の形態に係る自動運転車両制御装置におけるデータベースの構成方法の説明図である。
【図7】データベースの一例である。
【図8】データベースの更新の流れの一例である。
【発明を実施するための形態】
【0013】
以下、図面を参照して、本発明に係る自動運転車両制御装置の実施の形態を説明する。なお、各図において同一又は相当する要素については同一の符号を付し、重複する説明を省略する。
【0014】
本実施の形態では、本発明を、自動運転モードと手動運転モードを有する自動運転車両の制御装置に適用する。本実施の形態に係る自動運転車両では、通常、ドライバが操作して自動運転を選択している場合に自動運転モードになり、自動運転を選択していない場合には手動運転モードである。本実施の形態に係る自動運転車両制御装置では、自動運転モードの場合には目標進路に基づいて車両を制御し、手動運転モードの場合にはドライバの運転操作に基づいて車両を制御する。本実施の形態では、自動運転車両制御装置についての基本の形態について説明し、その後に、自動運転車両制御装置のデータベースの構成方法についての好適な方法について説明する。
【0015】
図1〜図3を参照して、本実施の形態に係る自動運転車両制御装置1について説明する。図1は、本実施の形態に係る自動運転車両制御装置の構成を示すブロック図である。図2は、車両が走行するシーンの一例である。図3は、手動運転モードと自動運転モードとの切り替えが行われる場合の一例であり、(a)が目標進路と実車進路の車両速度の時間変化であり、(b)がブレーキオーバーライドの時間変化である。
【0016】
自動運転車両制御装置1は、ドライバが自動運転を選択している場合でも、自動運転時にドライバが運転操作(オーバーライド)を行うと自動運転モードから手動運転モードに切り替える。特に、自動運転車両制御装置1は、オーバーライドで手動運転モードに切り替え後、手動運転による車両進路と自動運転の目標進路との差が小さくかつドライバがオーバーライドを行っていない場合には手動運転モードから自動運転モードに自動で切り替える。また、自動運転車両制御装置1は、自動運転の目標進路を生成する際に、データベースに蓄積されている過去のオーバーライド時の情報を加味して目標進路を生成する。
【0017】
そのために、自動運転車両制御装置1は、周辺環境認識装置10、自車情報検出装置11、オーバーライド検出装置12、データベース20、目標進路生成装置30、進路比較装置31、車両制御装置32を備えており、自動運転車両40を制御する。ちなみに、データベース20、目標進路生成装置30、進路比較装置31、車両制御装置32については、ECU[Electronic Control Unit]等の車載のコンピュータに組み込まれる。
【0018】
なお、本実施の形態では、オーバーライド検出装置12が特許請求の範囲に記載のオーバーライド検出手段に相当し、目標進路生成装置30が特許請求の範囲に記載の目標進路生成手段に相当し、進路比較装置31が特許請求の範囲に記載の進路比較手段に相当し、車両制御装置32が特許請求の範囲に記載の車両制御手段及び切替手段に相当する。
【0019】
周辺環境認識装置10は、カメラやレーダセンサ等の検知手段を備えており、これらで検知した情報に基づいて自車の周辺環境を認識する。認識対象の周辺環境情報としては、周辺の道路形状、周辺の物体(特に、障害物)、路面状態(路面摩擦係数)等がある。道路形状の認識は、例えば、カメラの撮像画像から車線を認識し、その認識した車線の車線幅、車線のカーブR、車線中心からの自車両のオフセット量等を算出する。周辺物体の認識は、例えば、カメラの撮像画像やレーダセンサのレーダ情報から歩行者、自転車、自動車、自動二輪車等を認識し、その認識した各物体の大きさ、位置、速度、移動方向等を算出する。
【0020】
自車情報検出装置11は、各種センサやGPS受信装置等の検出手段を備えており、この検出手段によって自車両の情報を検出する。検出対象の自車両の情報としては、例えば、自車両の位置、速度、加速度、操舵トルク、向き、ヨーレートがある。
【0021】
オーバーライド検出装置12は、各種センサ等の検出手段を備えており、この検出手段によってドライバのオーバーライド(運転操作)を検出する。検出対象の運転操作としては、例えば、ステアリング操作の操舵トルク、ブレーキ操作のブレーキペダルのON/OFFやブレーキペダルの踏み込み量、アクセル操作のアクセルペダルのON/OFFやアクセルペダルの踏み込み量(アクセル開度)がある。
【0022】
データベース20は、過去にドライバのオーバーライドが検出された際の情報が蓄積されるデータベースである。蓄積される情報としては、例えば、オーバーライドが検出された際の周辺環境情報や自車情報がある。したがって、データベース20には、オーバーライド検出装置12でオーバーライドが検出される毎に、そのときの周辺環境情報と自車情報が格納される。格納されるデータは、オーバーライドが検出されたときの各情報のデータでもよいし、オーバーライドが検出される前後の所定期間又はオーバーライドが検出された後の所定期間の各情報の時系列のデータでもよい。
【0023】
目標進路生成装置30は、自動運転の目標進路を生成する。具体的には、目標進路生成装置30では、基本的には、現在の周辺環境情報と自車情報に基づいて目標進路を生成する。この目標進路の生成方法についは、どのような方法でもよく、従来の方法を適用する。なお、目標進路は、車両の位置及びその各位置での車両の速度や向き等の車両の走行に必要な情報を含む。
【0024】
さらに、目標進路生成装置30では、現在の周辺環境情報と自車情報に基づいてデータベース20を検索し、現在の周辺環境情報や自車情報から判断できるそのときの走行のシーンと類似のシーンがデータベース20の中に格納されているか否かを判定する。例えば、車線のカーブR等からカーブ進入、カーブ走行中、カーブ退出の各シーンを判断できるので、データベース20の中に同様のカーブRの変化のデータがあれば類似のシーンと判定でき、前方の停止車両の有無や停止車両の相対位置等から障害物回避の各シーンを判断できるので、データベース20の中に同様の前方車両のデータがあれば類似のシーンと判定できる。
【0025】
類似のシーンがデータベース20に格納されている場合、目標進路生成装置30では、データベース20に格納されているその類似のシーンの周辺環境情報と自車情報から基本の目標進路に対するドライバ補正値を算出し、基本の目標進路に対してドライバ補正値で補正し、補正した目標進路を生成する。例えば、カーブ進入のシーンの場合、データベース20に格納されているオーバーライドが検出されたときのカーブ進入のシーンでの速度の変化と基本の目標進路における速度の変化を比較し、その速度の変化の違いから速度の補正量(オーバーライドしたときと同じ速度まで減速する補正量等)を算出する。また、前方の停止車両の回避のシーンの場合、データベース20に格納されているオーバーライドが検出されたときの障害物回避のシーンでの自車両位置の変化と基本の目標進路における自車両位置の変化を比較し、その位置の変化の違いから位置の補正量(オーバーライドしたときと同じ安全マージンまで停止車両から離れる補正量等)を算出する。
【0026】
図2には、自車両Vがカーブに進入するシーンを示している。このシーンの場合、以前に、ドライバが自動運転に対してオーバーライドしてカーブ進入速度を低減させている場合、データベース20にはそのときの各位置における速度等の自車情報とカーブR等の周辺環境情報が格納されている。周辺環境情報には、他車両の情報や路面状態も含まれるので、先行車両の有無や対向車両の有無及び路面摩擦係数によって、ドライバが減速させたシーンの詳細な情報が得られる。次に、自動運転中にデータベース20に格納されているカーブ進入時と類似のシーンになった場合、データベース20に格納される周辺環境情報から類似のシーンであることを判定でき、データベース20に格納される各位置の速度の情報からドライバがオーバーライドしたときと同じ速度まで低減させるドライバ補正値を算出して目標進路を補正でき、その目標進路に基づいて自動運転で同じ速度まで低下させることができる。
【0027】
進路比較装置31は、目標進路生成装置30で生成される自動運転の目標進路と自車情報検出装置11で検出される実際の自車両の進路とを比較する。この比較では、各進路に含まれる位置同士を比較するとともに、各進路に含まれる速度同士や車両向き同士等も比較する。具体的には、目標進路と実際の進路との位置の差、速度の差、車両向きの差等をそれぞれ算出し、その各差が閾値未満か否かをそれぞれ判定する。この各閾値は、目標進路と実際の進路とが近いか否か(手動運転から目標進路による自動運転に復帰したときに急な車両挙動となるか否か)を判定するための閾値であり、実験やシミュレーション等によって予め設定される。ちなみに、通常、目標進路に基づいて自動運転を行っているときには目標進路と実際の進路とは同様の進路となるが、自動運転に対してドライバがオーバーライドした場合にはドライバの運転操作に基づいて車両制御を行うので、自動運転の目標進路と実際の進路とが乖離する。
【0028】
車両制御装置32では、自動運転モードのときに、オーバーライド検出装置12でドライバのオーバーライドが検出された場合には自動運転モードから手動運転モードに切り替える。また、車両制御装置32では、オーバーライドで手動運転モードに切り替わっているときに、オーバーライド検出装置12でドライバのオーバーライドが検出されなくなりかつ進路比較装置31で目標進路と実際の進路との全ての差が閾値未満と判定されている状態が一定時間以上継続している場合には手動運転モードから自動運転モードに切り替える。この一定時間は、目標進路と実際の進路とが近いと判断できる十分な時間であり、実験やシミュレーション等によって予め設定される。ちなみに、自動運転モードは基本的にはドライバによる操作によって自動運転が選択されている場合になるので、ドライバによる操作によって自動運転が選択されていない場合には上記のような条件を満たしても手動運転モードから自動運転モードに切り替わらない。
【0029】
図3には、手動運転モードと自動運転モードとの切り替えが行われる場合の一例を示しており、自動運転モード中にドライバがブレーキオーバーライドした場合である。図(a)には目標進路の速度OV(破線)と実車進路の速度PV(実線)の時間変化を示しており、図(b)にはドライバのブレーキオーバーライドの有無を示している。区間Aでは、ドライバがブレーキ操作を行っているので、車両が減速し、目標進路の速度OVよりも実車進路の速度PVが低くなり、速度の乖離が大きくなる。この際、オーバーライドが検出されるので、自動運転モードから手動運転モードに切り替わる。区間Bでは、ドライバのブレーキ操作が終了しているので、車両の減速が殆どなくなり、目標進路の速度OVが低下して実車進路の速度PVとの乖離が徐々に小さくなっている。この際、オーバーライドは検出されないが、目標進路の速度OVと実車進路の速度PVとの差が閾値以上なので、手動運転モードのままである。ちなみに、この段階で自動運転モードに切り替えた場合、目標進路の速度OVが実車進路の速度PVよりも高いので、ドライバの予期せぬ加速が生じる可能性があり、ドライバが違和感を受ける。区間Cでは、ドライバのブレーキ操作の終了からある程度時間が経過しているので、目標進路の速度OVと実車進路の速度PVとが近い状態が継続している。この際、オーバーライドは検出され、目標進路の速度OVと実車進路の速度PVとの差が閾値未満の状態が一定時間以上継続したので、手動運転モードから自動運転モードに切り替わる。自動運転モードに切り替わっても、目標進路の速度OVと実車進路の速度OVとが殆ど変わらないので、急な加減速が生じず、ドライバが違和感を受けない。
【0030】
また、車両制御装置32は、運転モードに応じて自動運転車両40の走行状態(制動力、駆動力、操舵力等)を制御する。具体的には、自動運転モードの場合、車両制御装置32では、目標進路と現在の自車情報との位置、速度、向き等に基づいて、目標進路に沿って走行するために必要な目標制駆動力や目標操舵力(目標操舵角度)を算出する。また、手動運転モードの場合、車両制御装置32では、ドライバの運転操作量(アクセルペダル踏み込み量、ブレーキペダルの踏み込み量、操舵トルク等)に基づいて、運転操作に従って走行するために必要な目標制駆動力や目標操舵力を算出する。そして、車両制御装置32では、目標制駆動力に基づいてエンジン制御量又はブレーキ制御量を算出するとともに目標操舵力に基づいて操舵制御量を算出する。
【0031】
自動運転車両40は、スロットルアクチュエータ、ブレーキアクチュエータ、操舵アクチュエータ等を備えており、車両制御装置32による制御によって走行状態が制御される。自動運転車両40では、車両制御装置32で算出されたエンジン制御量又はブレーキ制御量に応じてスロットルアクチュエータやブレーキアクチュエータ等が作動するとともに操舵制御量に応じて操舵アクチュエータ等が作動し、所定の制駆動力や所定の操舵力を発生する。
【0032】
図1を参照して、自動運転車両制御装置1の動作について説明する。ここでは、特に、目標進路生成の動作を図4のフローチャートに沿って説明し、手動運転モードから自動運転モードへの運転モード切替の動作を図5のフローチャートに沿って説明する。なお、この動作説明では、ドライバによって「自動運転」が選択されている場合である。
【0033】
周辺環境認識装置10では、一定時間毎に、自車両の周辺環境を認識する(S10)。また、自車情報検出装置11では、一定時間毎に、自車両の情報を検出する(S11)。
【0034】
目標進路生成装置30では、現在の周辺環境情報と自車情報に基づいてデータベース20から現在の走行シーンと類似のシーンを検索し(S12)、類似のシーンがデータベース20の中に格納されているか否かを判定する(S13)。S13にて類似のシーンが有ると判定した場合、目標進路生成装置30では、現在の周辺環境情報と自車情報に基づいて基本となる目標進路を生成するとともにデータベース20の過去のオーバーライド時の類似のシーンの周辺環境情報と自車情報からドライバ補正値を算出し、基本の目標進路をドライバ補正値で補正して目標進路を生成する(S14)。
【0035】
S13にて類似のシーンが無いと判定した場合、目標進路生成装置30では、現在の周辺環境情報と自車情報に基づいて目標進路を生成する(S15)。また、オーバーライド検出装置12が一定時間毎にドライバのオーバーライド(運転操作)を検出し(S16)、車両制御装置32ではオーバーライドの有無を判定する(S17)。S17にてドライバのオーバーライドが有ると判定した場合、データベース20にオーバーライドした際の周辺環境情報と自車情報が格納され、更新される(S18)。この際、車両制御装置32では、自動運転モードから手動運転モードに切り替える。
【0036】
オーバーライドが検出されて手動運転モードに切り替わっている場合、オーバーライド検出装置12が一定時間毎にドライバのオーバーライドを検出し(S20)、車両制御装置32ではオーバーライドの有無を判定する(S21)。S21にてドライバのオーバーライドが有ると判定した場合、S20の動作に戻る。
【0037】
S21にてドライバのオーバーライドが無いと判定した場合、進路比較装置31は、自動運転の目標進路と実車進路とを比較し、その進路の差が閾値未満か否かを判定する(S22)。車両制御装置32では、目標進路と実車進路との差が閾値未満の状態が一定時間以上継続しているか否かを判定する(S23)。S23にて目標進路と実車進路との差が閾値未満の状態が一定時間以上継続していていないと判定した場合、S20の動作に戻る。S23にて目標進路と実車進路との差が閾値未満の状態が一定時間以上継続したと判定した場合、車両制御装置32では、手動運転モードから自動運転モードに自動で切り替える(S24)。
【0038】
自動運転モードの場合、車両制御装置32では、目標進路と現在の自車情報との位置、速度、向き等に基づいて目標制駆動力や目標操舵力を算出し、目標制駆動力や目標操舵力に基づいてエンジン制御量又はブレーキ制御量や操舵制御量を算出する。オーバーライドが検出されて手動運転モードの場合、車両制御装置32では、ドライバの運転操作量に基づいて目標制駆動力や目標操舵力を算出し、目標制駆動力や目標操舵力に基づいてエンジン制御量又はブレーキ制御量や操舵制御量を算出する。自動運転車両40では、このエンジン制御量又はブレーキ制御量や操舵制御量に基づいて制動力又は駆動力や操舵力を発生する。
【0039】
この自動運転車両制御装置1によれば、オーバーライドで手動運転モードに切り替わった場合でも目標進路と実車進路との差が小さくかつオーバーライドが検出されないときには手動運転モードから自動運転モードに自動で切り替えることができるので、ドライバ自身が切り替え操作を行う必要がない。目標進路と実車進路との差が小さくなっていることを条件としているので、自動で自動運転モードに切り替わっても車両が急な挙動(急加速、急減速、急操舵等)をすることなく、スムーズに切り替わり、ドライバが違和感を受けない。
【0040】
また、自動運転車両制御装置1によれば、データベース20に格納されている類似のシーを走行するときにはドライバの過去のオーバーライド時の周辺環境情報や自車情報も加味して自動運転の目標進路を生成するので、ドライバの運転特性に合うように自動運転時の車両挙動が改善され、自動運転時の車両挙動に対するドライバの違和感を抑制できる。その結果、自動運転中にドライバがオーバーライドする回数が低減する。
【0041】
上記で説明したデータベース20にはオーバーライドが検出されたときの周辺環境情報と自車情報が全て格納される。そのため、様々な周辺環境情報や自車情報の複雑さに加えて車両の走行のシーンも変化するため、データベースに格納されるデータ量が膨大となる。その結果、類似するシーンの検索が困難になるとともに、データベースとしての膨大な記憶容量が必要となる。
【0042】
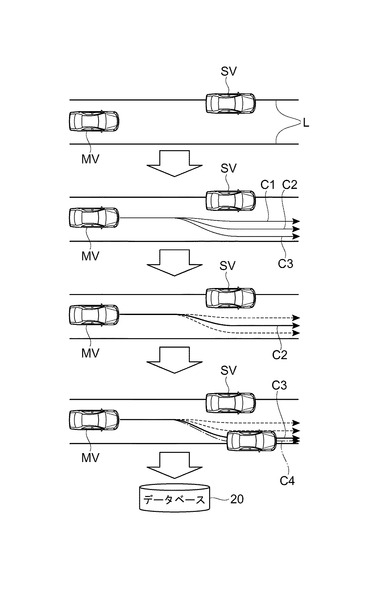
そこで、図6〜図8を参照して、格納するデータを圧縮するデータベースの構成方法について説明する。このデータベースの構成方法は、目標進路生成ロジックと関連した方法であるので、目標進路生成ロジックと共に説明する。図6は、本実施の形態に係る自動運転車両制御装置におけるデータベースの構成方法の説明図である。図7は、データベースの一例である。図8は、データベースの更新の流れの一例である。
【0043】
まず、目標進路生成ロジックにおいて、現在の周辺環境情報と自車情報に基づいて将来の行動種別を選択する(W10)。行動種別は、上記の車両が走行するシーンに相当し、例えば、カーブ進入、障害物回避、レーンチェンジがある。
【0044】
そして、目標進路生成ロジックにおいて、W10で選択された行動種別に対して予め設定されたパラメータに基づいて有限個の目標進路(候補)を算出する(W11)。この設定パラメータは、行動種別毎に設定され、例えば、障害物回避の場合には回避対象の障害物との距離(安全マージン)がある。
【0045】
さらに、目標進路生成ロジックにおいて、W11で生成された有限個の目標進路(候補)の中から初期設定パラメータに基づいて目標進路を選択する(W12)。初期設定パラメータは、安全に走行できる範囲内において標準的な目標進路を設定するためのパラメータであり、例えば、障害物回避の場合には安全マージンの中間値である。したがって、ここで選択される目標進路は、そのときの周辺環境や自車走行状態において最も標準的な進路であり、上記で説明した目標進路生成装置30で生成される基本の目標進路に相当する。
【0046】
W12で選択された目標進路に基づいて自動運転を行っているときにドライバによるオーバーライドが検出された場合(W13)、W11で生成された有限個の目標進路(候補)の中から、手動運転時のドライバの運転操作に基づく実車の進路に最も近い目標進路を選択する(W14)。この選択される目標進路は、ドライバの運転特性に最も適合した進路である。W14で選択すると、データベース20に、そのときの行動種別に対応付けてその行動種別を特徴付ける環境パラメータ及び選択された目標進路に対応する進路選択パラメータを格納する(W15)。環境パラメータとしては、例えば、図7に示すように障害物回避の場合には障害物位置、障害物大きさ、車線幅、対向車有無がある。
【0047】
図7及び図8に示す障害物回避の例を用いて、上記のデータベースの構成方法を具体的に説明する。まず、図8の最も上図に示すように、周辺環境情報として自車両MVの前方の左側の停止車両SVの存在とその停止車両SVの相対的な横位置や車幅、走行車線Lの情報(車線幅等)、対向車両の有無等が認識される。この周辺環境情報の認識結果等から行動種別として障害物回避が選択される。
【0048】
次に、図8の上から2番目の図に示すように、障害物回避に対して回避対象(停止車両SV)との距離(安全マージン)を設定パラメータとして、安全マージンの異なる3つの目標進路(候補)C1,C2,C3が生成される。
【0049】
次に、図8の上から3番目の図に示すように、安全マージンの中間値を初期設定パラメータとして、3つの目標進路(候補)C1,C2,C3の中から中間の目標進路C2が選択される。この目標進路C2に基づいて自動運転が実施される。この自動運転中にドライバがステアリングオーバーライドを行ったので、自車両MVの実車進路が手動運転によって進路C4となる。
【0050】
この際、ドライバのオーバーライドが検出されると、実車進路C4と3つの目標進路(候補)C1,C2,C3との類似度がそれぞれ算出される。そして、最も類似度の高い目標進路C3が選択され、進路選択パラメータとして「3」が設定される。さらに、データベース20に、図7に示すように、行動種別の障害部回避に対応付けて、障害物回避を特徴付ける環境パラメータとしてオーバーライド時の障害物の相対横位置(1.5m)、障害物の車幅(1.8m)、車線幅(3.5m)、対向車両の有無(無し)及び進路選択パラメータ(3)が格納される。この図7の例では、その他にも障害物の相対横位置が2.0mのときにオーバーライドした際のデータや対向車両が有るときにオーバーライドした際のデータも格納されている。
【0051】
このようなデータがデータベース20に格納された後に、自車両MVの前方左側に停止車両を認識し、その停止車両の相対横位置が1.5m程度、停止車両の車幅が1.8m程度、車線幅が3.5m程度、対向車両が無いシーンに遭遇した場合、進路選択パラメータの「3」に基づいて目標進路C3が選択される。この目標進路C3に基づいて自動運転を行うことにより、標準的な安全マージンよりも大きな安全マージンをとって走行するドライバの運転特性に合った進路となる。
【0052】
このデータベースの構成方法により、データベース20には行動種別毎に行動種別を特徴付ける環境パラメータと進路選択パラメータだけが格納されるので、格納されるデータが簡素化し、格納されるデータ量が大幅に低減される。また、データベース20を検索する際に、行動種別を特徴付ける環境パラメータに基づいて類似のシーンを簡単に検索可能である。
【0053】
以上、本発明に係る実施の形態について説明したが、本発明は上記実施の形態に限定されることなく様々な形態で実施される。
【0054】
例えば、本実施の形態ではデータベースに格納される過去のオーバーライド時の情報を用いた目標進路補正制御と手動運転モードから自動運転モードへの自動の運転モード切替制御を両方行う自動運転車両制御装置に適用したが、どちらか一方のみを行う制御装置にも適用可能である。
【符号の説明】
【0055】
1…自動運転車両制御装置、10…周辺環境認識装置、11…自車情報検出装置、12…オーバーライド検出装置、20…データベース、30…目標進路生成装置、31…進路比較装置、32…車両制御装置、40…自動運転車両。
【技術分野】
【0001】
本発明は、自動運転車両制御装置に関する。
【背景技術】
【0002】
自動運転車両は、通常、自動運転中にドライバが運転操作を行うと(すなわち、オーバーライドすると)、ドライバの運転操作に応じた手動運転に切り替わる。特許文献1には、自動運転可能走行区間から自動運転禁止区間へ移動する際に自動運転から手動運転へ円滑に切り替える方法が提案されており、ドライバの手動運転切り替え準備を確認するためにステアリングオーバーライド検出装置を利用しており、自動運転中にステアリングオーバーライドが検出されると自動運転制御を中止して手動運転に切り替わることが記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−276690号公報
【特許文献2】特開2010−149612号公報
【特許文献3】特開2008−162524号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の自動運転車両では、オーバーライドで自動運転から手動運転に切り替わった場合、手動運転から自動運転へ復帰する際はドライバ自身が切り替えを行わなければならない。そのため、ドライバは、オーバーライドを行う毎に、自動運転に復帰させたい場合には切り替え操作が必要となり、非常に煩わしい。
【0005】
そこで、本発明は、自動運転から手動運転への自動での切り替えを可能とする自動運転車両制御装置を提供することを課題とする。
【課題を解決するための手段】
【0006】
本発明に係る自動運転車両制御装置は、ドライバがオーバーライドした場合に自動運転から手動運転に切り替える自動運転車両を制御する自動運転車両制御装置であって、自動運転の目標進路を生成する目標進路生成手段と、目標進路生成手段で生成した自動運転の目標進路又はドライバによる運転操作に基づいて車両を制御する車両制御手段と、実際の車両進路と目標進路生成手段で生成した自動運転の目標進路とを比較する進路比較手段と、ドライバのオーバーライドを検出するオーバーライド検出手段と、手動運転時に進路比較手段で比較した進路の差が閾値未満でありかつオーバーライド検出手段でドライバのオーバーライドが検出されていない場合に手動運転から自動運転に切り替える切替手段とを備えることを特徴とする。
【0007】
この自動運転車両制御装置では、目標進路生成手段によって自動運転の目標進路を生成する。そして、自動運転車両制御装置では、自動運転時には車両制御手段によって自動運転の目標進路に沿って走行するように車両を制御し、手動運転時には車両制御手段によってドライバの運転操作に従って車両を制御する。特に、この自動運転車両制御装置では、進路比較手段によって実際の車両進路と自動運転の目標進路とを比較するとともに、オーバーライド検出手段によってドライバのオーバーライド(運転操作)を検出する。手動運転時に、自動運転制御装置では、切替手段によって進路比較手段での比較結果とオーバーライド検出手段で検出結果に基づいて進路の差が閾値未満かつオーバーライドが検出されていない場合には手動運転から自動運転に切り替える。このように、自動運転車両制御装置では、手動運転から自動運転に自動で切り替えることができ、ドライバ自身が切り替え操作を行う必要がない。手動運転から自動運転に切り替わるときには実際の車両進路と自動運転の目標進路との差が閾値未満となっているので、自動運転に切り替わっても車両が急な挙動(急加速、急減速、急操舵等)となることなく、スムーズに切り替わり、ドライバが違和感を受けない。
【0008】
なお、実際の車両進路や自動運転の目標進路は、車両の位置だけでなく、車両の速度、加速度、向き等の他の情報も含まれる。したがって、進路比較手段で進路を比較する場合には実際の車両進路と自動運転の目標進路とにそれぞれ含まれる各情報を比較し、各情報について差が閾値未満か否かをそれぞれ判定する。
【0009】
本発明の上記自動運転車両制御装置では、目標進路生成手段は、過去のオーバーライド時の情報と現在の車両情報及び周辺環境情報に基づいて自動運転の目標進路を生成すると好適である。
【0010】
この自動運転車両制御装置の目標進路生成手段では、目標進路を生成する際に、現在の車両情報及び周辺環境情報だけでなく、過去のオーバーライド時の情報(例えば、進路情報、車両情報、周辺環境情報)も加味して自動運転の目標進路を生成する。自動運転中にドライバがオーバーライドを行う場合、ドライバは自動運転による車両挙動に対して違和感(例えば、カーブ進入時に進入速度が高すぎる。障害物回避時に障害物までの距離が近すぎる。)を受けている。この違和感を解消するために、ドライバ自身が運転操作して車両挙動を変える(例えば、カーブ進入時に速度を低下させる。障害物回避時に自車両を障害物からより離れさせる。)このようなオーバーライド時の情報を利用することにより、そのドライバの望む車両挙動となるような目標進路を生成できる。このように、自動運転車両制御装置では、ドライバの過去のオーバーライド時の情報も加味して自動運転の目標進路を生成することにより、そのドライバの運転特性に合うように自動運転時の車両挙動が改善され、自動運転時の車両挙動に対するドライバの違和感を抑制できる。その結果、自動運転中にドライバがオーバーライドする回数が低減する。
【発明の効果】
【0011】
本発明によれば、手動運転から自動運転に自動で切り替えることができ、ドライバ自身が切り替え操作を行う必要がない。
【図面の簡単な説明】
【0012】
【図1】本実施の形態に係る自動運転車両制御装置の構成を示すブロック図である。
【図2】車両が走行するシーンの一例である。
【図3】手動運転モードと自動運転モードとの切り替えが行われる場合の一例であり、(a)が目標進路と実車進路の車両速度の時間変化であり、(b)がブレーキオーバーライドの時間変化である。
【図4】図1の自動運転車両制御装置における目標進路生成の動作の流れを示すフローチャートである。
【図5】図1の自動運転車両制御装置における運転モード切替の動作の流れを示すフローチャートである。
【図6】本実施の形態に係る自動運転車両制御装置におけるデータベースの構成方法の説明図である。
【図7】データベースの一例である。
【図8】データベースの更新の流れの一例である。
【発明を実施するための形態】
【0013】
以下、図面を参照して、本発明に係る自動運転車両制御装置の実施の形態を説明する。なお、各図において同一又は相当する要素については同一の符号を付し、重複する説明を省略する。
【0014】
本実施の形態では、本発明を、自動運転モードと手動運転モードを有する自動運転車両の制御装置に適用する。本実施の形態に係る自動運転車両では、通常、ドライバが操作して自動運転を選択している場合に自動運転モードになり、自動運転を選択していない場合には手動運転モードである。本実施の形態に係る自動運転車両制御装置では、自動運転モードの場合には目標進路に基づいて車両を制御し、手動運転モードの場合にはドライバの運転操作に基づいて車両を制御する。本実施の形態では、自動運転車両制御装置についての基本の形態について説明し、その後に、自動運転車両制御装置のデータベースの構成方法についての好適な方法について説明する。
【0015】
図1〜図3を参照して、本実施の形態に係る自動運転車両制御装置1について説明する。図1は、本実施の形態に係る自動運転車両制御装置の構成を示すブロック図である。図2は、車両が走行するシーンの一例である。図3は、手動運転モードと自動運転モードとの切り替えが行われる場合の一例であり、(a)が目標進路と実車進路の車両速度の時間変化であり、(b)がブレーキオーバーライドの時間変化である。
【0016】
自動運転車両制御装置1は、ドライバが自動運転を選択している場合でも、自動運転時にドライバが運転操作(オーバーライド)を行うと自動運転モードから手動運転モードに切り替える。特に、自動運転車両制御装置1は、オーバーライドで手動運転モードに切り替え後、手動運転による車両進路と自動運転の目標進路との差が小さくかつドライバがオーバーライドを行っていない場合には手動運転モードから自動運転モードに自動で切り替える。また、自動運転車両制御装置1は、自動運転の目標進路を生成する際に、データベースに蓄積されている過去のオーバーライド時の情報を加味して目標進路を生成する。
【0017】
そのために、自動運転車両制御装置1は、周辺環境認識装置10、自車情報検出装置11、オーバーライド検出装置12、データベース20、目標進路生成装置30、進路比較装置31、車両制御装置32を備えており、自動運転車両40を制御する。ちなみに、データベース20、目標進路生成装置30、進路比較装置31、車両制御装置32については、ECU[Electronic Control Unit]等の車載のコンピュータに組み込まれる。
【0018】
なお、本実施の形態では、オーバーライド検出装置12が特許請求の範囲に記載のオーバーライド検出手段に相当し、目標進路生成装置30が特許請求の範囲に記載の目標進路生成手段に相当し、進路比較装置31が特許請求の範囲に記載の進路比較手段に相当し、車両制御装置32が特許請求の範囲に記載の車両制御手段及び切替手段に相当する。
【0019】
周辺環境認識装置10は、カメラやレーダセンサ等の検知手段を備えており、これらで検知した情報に基づいて自車の周辺環境を認識する。認識対象の周辺環境情報としては、周辺の道路形状、周辺の物体(特に、障害物)、路面状態(路面摩擦係数)等がある。道路形状の認識は、例えば、カメラの撮像画像から車線を認識し、その認識した車線の車線幅、車線のカーブR、車線中心からの自車両のオフセット量等を算出する。周辺物体の認識は、例えば、カメラの撮像画像やレーダセンサのレーダ情報から歩行者、自転車、自動車、自動二輪車等を認識し、その認識した各物体の大きさ、位置、速度、移動方向等を算出する。
【0020】
自車情報検出装置11は、各種センサやGPS受信装置等の検出手段を備えており、この検出手段によって自車両の情報を検出する。検出対象の自車両の情報としては、例えば、自車両の位置、速度、加速度、操舵トルク、向き、ヨーレートがある。
【0021】
オーバーライド検出装置12は、各種センサ等の検出手段を備えており、この検出手段によってドライバのオーバーライド(運転操作)を検出する。検出対象の運転操作としては、例えば、ステアリング操作の操舵トルク、ブレーキ操作のブレーキペダルのON/OFFやブレーキペダルの踏み込み量、アクセル操作のアクセルペダルのON/OFFやアクセルペダルの踏み込み量(アクセル開度)がある。
【0022】
データベース20は、過去にドライバのオーバーライドが検出された際の情報が蓄積されるデータベースである。蓄積される情報としては、例えば、オーバーライドが検出された際の周辺環境情報や自車情報がある。したがって、データベース20には、オーバーライド検出装置12でオーバーライドが検出される毎に、そのときの周辺環境情報と自車情報が格納される。格納されるデータは、オーバーライドが検出されたときの各情報のデータでもよいし、オーバーライドが検出される前後の所定期間又はオーバーライドが検出された後の所定期間の各情報の時系列のデータでもよい。
【0023】
目標進路生成装置30は、自動運転の目標進路を生成する。具体的には、目標進路生成装置30では、基本的には、現在の周辺環境情報と自車情報に基づいて目標進路を生成する。この目標進路の生成方法についは、どのような方法でもよく、従来の方法を適用する。なお、目標進路は、車両の位置及びその各位置での車両の速度や向き等の車両の走行に必要な情報を含む。
【0024】
さらに、目標進路生成装置30では、現在の周辺環境情報と自車情報に基づいてデータベース20を検索し、現在の周辺環境情報や自車情報から判断できるそのときの走行のシーンと類似のシーンがデータベース20の中に格納されているか否かを判定する。例えば、車線のカーブR等からカーブ進入、カーブ走行中、カーブ退出の各シーンを判断できるので、データベース20の中に同様のカーブRの変化のデータがあれば類似のシーンと判定でき、前方の停止車両の有無や停止車両の相対位置等から障害物回避の各シーンを判断できるので、データベース20の中に同様の前方車両のデータがあれば類似のシーンと判定できる。
【0025】
類似のシーンがデータベース20に格納されている場合、目標進路生成装置30では、データベース20に格納されているその類似のシーンの周辺環境情報と自車情報から基本の目標進路に対するドライバ補正値を算出し、基本の目標進路に対してドライバ補正値で補正し、補正した目標進路を生成する。例えば、カーブ進入のシーンの場合、データベース20に格納されているオーバーライドが検出されたときのカーブ進入のシーンでの速度の変化と基本の目標進路における速度の変化を比較し、その速度の変化の違いから速度の補正量(オーバーライドしたときと同じ速度まで減速する補正量等)を算出する。また、前方の停止車両の回避のシーンの場合、データベース20に格納されているオーバーライドが検出されたときの障害物回避のシーンでの自車両位置の変化と基本の目標進路における自車両位置の変化を比較し、その位置の変化の違いから位置の補正量(オーバーライドしたときと同じ安全マージンまで停止車両から離れる補正量等)を算出する。
【0026】
図2には、自車両Vがカーブに進入するシーンを示している。このシーンの場合、以前に、ドライバが自動運転に対してオーバーライドしてカーブ進入速度を低減させている場合、データベース20にはそのときの各位置における速度等の自車情報とカーブR等の周辺環境情報が格納されている。周辺環境情報には、他車両の情報や路面状態も含まれるので、先行車両の有無や対向車両の有無及び路面摩擦係数によって、ドライバが減速させたシーンの詳細な情報が得られる。次に、自動運転中にデータベース20に格納されているカーブ進入時と類似のシーンになった場合、データベース20に格納される周辺環境情報から類似のシーンであることを判定でき、データベース20に格納される各位置の速度の情報からドライバがオーバーライドしたときと同じ速度まで低減させるドライバ補正値を算出して目標進路を補正でき、その目標進路に基づいて自動運転で同じ速度まで低下させることができる。
【0027】
進路比較装置31は、目標進路生成装置30で生成される自動運転の目標進路と自車情報検出装置11で検出される実際の自車両の進路とを比較する。この比較では、各進路に含まれる位置同士を比較するとともに、各進路に含まれる速度同士や車両向き同士等も比較する。具体的には、目標進路と実際の進路との位置の差、速度の差、車両向きの差等をそれぞれ算出し、その各差が閾値未満か否かをそれぞれ判定する。この各閾値は、目標進路と実際の進路とが近いか否か(手動運転から目標進路による自動運転に復帰したときに急な車両挙動となるか否か)を判定するための閾値であり、実験やシミュレーション等によって予め設定される。ちなみに、通常、目標進路に基づいて自動運転を行っているときには目標進路と実際の進路とは同様の進路となるが、自動運転に対してドライバがオーバーライドした場合にはドライバの運転操作に基づいて車両制御を行うので、自動運転の目標進路と実際の進路とが乖離する。
【0028】
車両制御装置32では、自動運転モードのときに、オーバーライド検出装置12でドライバのオーバーライドが検出された場合には自動運転モードから手動運転モードに切り替える。また、車両制御装置32では、オーバーライドで手動運転モードに切り替わっているときに、オーバーライド検出装置12でドライバのオーバーライドが検出されなくなりかつ進路比較装置31で目標進路と実際の進路との全ての差が閾値未満と判定されている状態が一定時間以上継続している場合には手動運転モードから自動運転モードに切り替える。この一定時間は、目標進路と実際の進路とが近いと判断できる十分な時間であり、実験やシミュレーション等によって予め設定される。ちなみに、自動運転モードは基本的にはドライバによる操作によって自動運転が選択されている場合になるので、ドライバによる操作によって自動運転が選択されていない場合には上記のような条件を満たしても手動運転モードから自動運転モードに切り替わらない。
【0029】
図3には、手動運転モードと自動運転モードとの切り替えが行われる場合の一例を示しており、自動運転モード中にドライバがブレーキオーバーライドした場合である。図(a)には目標進路の速度OV(破線)と実車進路の速度PV(実線)の時間変化を示しており、図(b)にはドライバのブレーキオーバーライドの有無を示している。区間Aでは、ドライバがブレーキ操作を行っているので、車両が減速し、目標進路の速度OVよりも実車進路の速度PVが低くなり、速度の乖離が大きくなる。この際、オーバーライドが検出されるので、自動運転モードから手動運転モードに切り替わる。区間Bでは、ドライバのブレーキ操作が終了しているので、車両の減速が殆どなくなり、目標進路の速度OVが低下して実車進路の速度PVとの乖離が徐々に小さくなっている。この際、オーバーライドは検出されないが、目標進路の速度OVと実車進路の速度PVとの差が閾値以上なので、手動運転モードのままである。ちなみに、この段階で自動運転モードに切り替えた場合、目標進路の速度OVが実車進路の速度PVよりも高いので、ドライバの予期せぬ加速が生じる可能性があり、ドライバが違和感を受ける。区間Cでは、ドライバのブレーキ操作の終了からある程度時間が経過しているので、目標進路の速度OVと実車進路の速度PVとが近い状態が継続している。この際、オーバーライドは検出され、目標進路の速度OVと実車進路の速度PVとの差が閾値未満の状態が一定時間以上継続したので、手動運転モードから自動運転モードに切り替わる。自動運転モードに切り替わっても、目標進路の速度OVと実車進路の速度OVとが殆ど変わらないので、急な加減速が生じず、ドライバが違和感を受けない。
【0030】
また、車両制御装置32は、運転モードに応じて自動運転車両40の走行状態(制動力、駆動力、操舵力等)を制御する。具体的には、自動運転モードの場合、車両制御装置32では、目標進路と現在の自車情報との位置、速度、向き等に基づいて、目標進路に沿って走行するために必要な目標制駆動力や目標操舵力(目標操舵角度)を算出する。また、手動運転モードの場合、車両制御装置32では、ドライバの運転操作量(アクセルペダル踏み込み量、ブレーキペダルの踏み込み量、操舵トルク等)に基づいて、運転操作に従って走行するために必要な目標制駆動力や目標操舵力を算出する。そして、車両制御装置32では、目標制駆動力に基づいてエンジン制御量又はブレーキ制御量を算出するとともに目標操舵力に基づいて操舵制御量を算出する。
【0031】
自動運転車両40は、スロットルアクチュエータ、ブレーキアクチュエータ、操舵アクチュエータ等を備えており、車両制御装置32による制御によって走行状態が制御される。自動運転車両40では、車両制御装置32で算出されたエンジン制御量又はブレーキ制御量に応じてスロットルアクチュエータやブレーキアクチュエータ等が作動するとともに操舵制御量に応じて操舵アクチュエータ等が作動し、所定の制駆動力や所定の操舵力を発生する。
【0032】
図1を参照して、自動運転車両制御装置1の動作について説明する。ここでは、特に、目標進路生成の動作を図4のフローチャートに沿って説明し、手動運転モードから自動運転モードへの運転モード切替の動作を図5のフローチャートに沿って説明する。なお、この動作説明では、ドライバによって「自動運転」が選択されている場合である。
【0033】
周辺環境認識装置10では、一定時間毎に、自車両の周辺環境を認識する(S10)。また、自車情報検出装置11では、一定時間毎に、自車両の情報を検出する(S11)。
【0034】
目標進路生成装置30では、現在の周辺環境情報と自車情報に基づいてデータベース20から現在の走行シーンと類似のシーンを検索し(S12)、類似のシーンがデータベース20の中に格納されているか否かを判定する(S13)。S13にて類似のシーンが有ると判定した場合、目標進路生成装置30では、現在の周辺環境情報と自車情報に基づいて基本となる目標進路を生成するとともにデータベース20の過去のオーバーライド時の類似のシーンの周辺環境情報と自車情報からドライバ補正値を算出し、基本の目標進路をドライバ補正値で補正して目標進路を生成する(S14)。
【0035】
S13にて類似のシーンが無いと判定した場合、目標進路生成装置30では、現在の周辺環境情報と自車情報に基づいて目標進路を生成する(S15)。また、オーバーライド検出装置12が一定時間毎にドライバのオーバーライド(運転操作)を検出し(S16)、車両制御装置32ではオーバーライドの有無を判定する(S17)。S17にてドライバのオーバーライドが有ると判定した場合、データベース20にオーバーライドした際の周辺環境情報と自車情報が格納され、更新される(S18)。この際、車両制御装置32では、自動運転モードから手動運転モードに切り替える。
【0036】
オーバーライドが検出されて手動運転モードに切り替わっている場合、オーバーライド検出装置12が一定時間毎にドライバのオーバーライドを検出し(S20)、車両制御装置32ではオーバーライドの有無を判定する(S21)。S21にてドライバのオーバーライドが有ると判定した場合、S20の動作に戻る。
【0037】
S21にてドライバのオーバーライドが無いと判定した場合、進路比較装置31は、自動運転の目標進路と実車進路とを比較し、その進路の差が閾値未満か否かを判定する(S22)。車両制御装置32では、目標進路と実車進路との差が閾値未満の状態が一定時間以上継続しているか否かを判定する(S23)。S23にて目標進路と実車進路との差が閾値未満の状態が一定時間以上継続していていないと判定した場合、S20の動作に戻る。S23にて目標進路と実車進路との差が閾値未満の状態が一定時間以上継続したと判定した場合、車両制御装置32では、手動運転モードから自動運転モードに自動で切り替える(S24)。
【0038】
自動運転モードの場合、車両制御装置32では、目標進路と現在の自車情報との位置、速度、向き等に基づいて目標制駆動力や目標操舵力を算出し、目標制駆動力や目標操舵力に基づいてエンジン制御量又はブレーキ制御量や操舵制御量を算出する。オーバーライドが検出されて手動運転モードの場合、車両制御装置32では、ドライバの運転操作量に基づいて目標制駆動力や目標操舵力を算出し、目標制駆動力や目標操舵力に基づいてエンジン制御量又はブレーキ制御量や操舵制御量を算出する。自動運転車両40では、このエンジン制御量又はブレーキ制御量や操舵制御量に基づいて制動力又は駆動力や操舵力を発生する。
【0039】
この自動運転車両制御装置1によれば、オーバーライドで手動運転モードに切り替わった場合でも目標進路と実車進路との差が小さくかつオーバーライドが検出されないときには手動運転モードから自動運転モードに自動で切り替えることができるので、ドライバ自身が切り替え操作を行う必要がない。目標進路と実車進路との差が小さくなっていることを条件としているので、自動で自動運転モードに切り替わっても車両が急な挙動(急加速、急減速、急操舵等)をすることなく、スムーズに切り替わり、ドライバが違和感を受けない。
【0040】
また、自動運転車両制御装置1によれば、データベース20に格納されている類似のシーを走行するときにはドライバの過去のオーバーライド時の周辺環境情報や自車情報も加味して自動運転の目標進路を生成するので、ドライバの運転特性に合うように自動運転時の車両挙動が改善され、自動運転時の車両挙動に対するドライバの違和感を抑制できる。その結果、自動運転中にドライバがオーバーライドする回数が低減する。
【0041】
上記で説明したデータベース20にはオーバーライドが検出されたときの周辺環境情報と自車情報が全て格納される。そのため、様々な周辺環境情報や自車情報の複雑さに加えて車両の走行のシーンも変化するため、データベースに格納されるデータ量が膨大となる。その結果、類似するシーンの検索が困難になるとともに、データベースとしての膨大な記憶容量が必要となる。
【0042】
そこで、図6〜図8を参照して、格納するデータを圧縮するデータベースの構成方法について説明する。このデータベースの構成方法は、目標進路生成ロジックと関連した方法であるので、目標進路生成ロジックと共に説明する。図6は、本実施の形態に係る自動運転車両制御装置におけるデータベースの構成方法の説明図である。図7は、データベースの一例である。図8は、データベースの更新の流れの一例である。
【0043】
まず、目標進路生成ロジックにおいて、現在の周辺環境情報と自車情報に基づいて将来の行動種別を選択する(W10)。行動種別は、上記の車両が走行するシーンに相当し、例えば、カーブ進入、障害物回避、レーンチェンジがある。
【0044】
そして、目標進路生成ロジックにおいて、W10で選択された行動種別に対して予め設定されたパラメータに基づいて有限個の目標進路(候補)を算出する(W11)。この設定パラメータは、行動種別毎に設定され、例えば、障害物回避の場合には回避対象の障害物との距離(安全マージン)がある。
【0045】
さらに、目標進路生成ロジックにおいて、W11で生成された有限個の目標進路(候補)の中から初期設定パラメータに基づいて目標進路を選択する(W12)。初期設定パラメータは、安全に走行できる範囲内において標準的な目標進路を設定するためのパラメータであり、例えば、障害物回避の場合には安全マージンの中間値である。したがって、ここで選択される目標進路は、そのときの周辺環境や自車走行状態において最も標準的な進路であり、上記で説明した目標進路生成装置30で生成される基本の目標進路に相当する。
【0046】
W12で選択された目標進路に基づいて自動運転を行っているときにドライバによるオーバーライドが検出された場合(W13)、W11で生成された有限個の目標進路(候補)の中から、手動運転時のドライバの運転操作に基づく実車の進路に最も近い目標進路を選択する(W14)。この選択される目標進路は、ドライバの運転特性に最も適合した進路である。W14で選択すると、データベース20に、そのときの行動種別に対応付けてその行動種別を特徴付ける環境パラメータ及び選択された目標進路に対応する進路選択パラメータを格納する(W15)。環境パラメータとしては、例えば、図7に示すように障害物回避の場合には障害物位置、障害物大きさ、車線幅、対向車有無がある。
【0047】
図7及び図8に示す障害物回避の例を用いて、上記のデータベースの構成方法を具体的に説明する。まず、図8の最も上図に示すように、周辺環境情報として自車両MVの前方の左側の停止車両SVの存在とその停止車両SVの相対的な横位置や車幅、走行車線Lの情報(車線幅等)、対向車両の有無等が認識される。この周辺環境情報の認識結果等から行動種別として障害物回避が選択される。
【0048】
次に、図8の上から2番目の図に示すように、障害物回避に対して回避対象(停止車両SV)との距離(安全マージン)を設定パラメータとして、安全マージンの異なる3つの目標進路(候補)C1,C2,C3が生成される。
【0049】
次に、図8の上から3番目の図に示すように、安全マージンの中間値を初期設定パラメータとして、3つの目標進路(候補)C1,C2,C3の中から中間の目標進路C2が選択される。この目標進路C2に基づいて自動運転が実施される。この自動運転中にドライバがステアリングオーバーライドを行ったので、自車両MVの実車進路が手動運転によって進路C4となる。
【0050】
この際、ドライバのオーバーライドが検出されると、実車進路C4と3つの目標進路(候補)C1,C2,C3との類似度がそれぞれ算出される。そして、最も類似度の高い目標進路C3が選択され、進路選択パラメータとして「3」が設定される。さらに、データベース20に、図7に示すように、行動種別の障害部回避に対応付けて、障害物回避を特徴付ける環境パラメータとしてオーバーライド時の障害物の相対横位置(1.5m)、障害物の車幅(1.8m)、車線幅(3.5m)、対向車両の有無(無し)及び進路選択パラメータ(3)が格納される。この図7の例では、その他にも障害物の相対横位置が2.0mのときにオーバーライドした際のデータや対向車両が有るときにオーバーライドした際のデータも格納されている。
【0051】
このようなデータがデータベース20に格納された後に、自車両MVの前方左側に停止車両を認識し、その停止車両の相対横位置が1.5m程度、停止車両の車幅が1.8m程度、車線幅が3.5m程度、対向車両が無いシーンに遭遇した場合、進路選択パラメータの「3」に基づいて目標進路C3が選択される。この目標進路C3に基づいて自動運転を行うことにより、標準的な安全マージンよりも大きな安全マージンをとって走行するドライバの運転特性に合った進路となる。
【0052】
このデータベースの構成方法により、データベース20には行動種別毎に行動種別を特徴付ける環境パラメータと進路選択パラメータだけが格納されるので、格納されるデータが簡素化し、格納されるデータ量が大幅に低減される。また、データベース20を検索する際に、行動種別を特徴付ける環境パラメータに基づいて類似のシーンを簡単に検索可能である。
【0053】
以上、本発明に係る実施の形態について説明したが、本発明は上記実施の形態に限定されることなく様々な形態で実施される。
【0054】
例えば、本実施の形態ではデータベースに格納される過去のオーバーライド時の情報を用いた目標進路補正制御と手動運転モードから自動運転モードへの自動の運転モード切替制御を両方行う自動運転車両制御装置に適用したが、どちらか一方のみを行う制御装置にも適用可能である。
【符号の説明】
【0055】
1…自動運転車両制御装置、10…周辺環境認識装置、11…自車情報検出装置、12…オーバーライド検出装置、20…データベース、30…目標進路生成装置、31…進路比較装置、32…車両制御装置、40…自動運転車両。
【特許請求の範囲】
【請求項1】
ドライバがオーバーライドした場合に自動運転から手動運転に切り替える自動運転車両を制御する自動運転車両制御装置であって、
自動運転の目標進路を生成する目標進路生成手段と、
前記目標進路生成手段で生成した自動運転の目標進路又はドライバによる運転操作に基づいて車両を制御する車両制御手段と、
実際の車両進路と前記目標進路生成手段で生成した自動運転の目標進路とを比較する進路比較手段と、
ドライバのオーバーライドを検出するオーバーライド検出手段と、
手動運転時に前記進路比較手段で比較した進路の差が閾値未満でありかつ前記オーバーライド検出手段でドライバのオーバーライドが検出されていない場合に手動運転から自動運転に切り替える切替手段と
を備えることを特徴とする自動運転車両制御装置。
【請求項2】
前記目標進路生成手段は、過去のオーバーライド時の情報と現在の車両情報及び周辺環境情報に基づいて自動運転の目標進路を生成することを特徴とする請求項1に記載の自動運転車両制御装置。
【請求項1】
ドライバがオーバーライドした場合に自動運転から手動運転に切り替える自動運転車両を制御する自動運転車両制御装置であって、
自動運転の目標進路を生成する目標進路生成手段と、
前記目標進路生成手段で生成した自動運転の目標進路又はドライバによる運転操作に基づいて車両を制御する車両制御手段と、
実際の車両進路と前記目標進路生成手段で生成した自動運転の目標進路とを比較する進路比較手段と、
ドライバのオーバーライドを検出するオーバーライド検出手段と、
手動運転時に前記進路比較手段で比較した進路の差が閾値未満でありかつ前記オーバーライド検出手段でドライバのオーバーライドが検出されていない場合に手動運転から自動運転に切り替える切替手段と
を備えることを特徴とする自動運転車両制御装置。
【請求項2】
前記目標進路生成手段は、過去のオーバーライド時の情報と現在の車両情報及び周辺環境情報に基づいて自動運転の目標進路を生成することを特徴とする請求項1に記載の自動運転車両制御装置。
【図1】



【図2】

【図3】
【図4】
【図5】
【図6】
【図7】

【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−51441(P2012−51441A)
【公開日】平成24年3月15日(2012.3.15)
【国際特許分類】
【出願番号】特願2010−194752(P2010−194752)
【出願日】平成22年8月31日(2010.8.31)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成24年3月15日(2012.3.15)
【国際特許分類】
【出願日】平成22年8月31日(2010.8.31)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]