
自動遠心分離装置
【課題】 本発明は、各種装置から検体容器を受け取り、遠心分離を実施して再び、各種機器へ戻す自動遠心分離装置の、処理途中のサンプル状態の確認を簡便にすることである。使用する検体容器(マイクロプレート)のウェル(サンプルをいれる穴)が浅いものや深い物がある。夫々の外部装置は信頼性向上に注力しているが、最終顧客は動作中のサンプル状態を確認したい場合がある。また、運転を中断した場合は、簡単にサンプルの状態が確認したいとの要求がある。特に遠心分離機は安全性の点から遠心中はドアを閉じており、ドアを動作することが面倒である。
【解決手段】 上記した課題を解決するために、外部装置からの指示に従い運転を実行するための制御機構を有しているので、制御プログラム内に運転中断信号の受信を検知したら、動作を停止して、その後にドアを開いて装置の状態が運転中断で待機状態であることを制御装置内に記憶することで可能となる。
【解決手段】 上記した課題を解決するために、外部装置からの指示に従い運転を実行するための制御機構を有しているので、制御プログラム内に運転中断信号の受信を検知したら、動作を停止して、その後にドアを開いて装置の状態が運転中断で待機状態であることを制御装置内に記憶することで可能となる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、医学・農学・薬学・理学などの分野で細胞・核酸などの有用物質の分離を自動で搬入・遠心・搬出を行う自動遠心分離装置における操作性に関するものである。
【背景技術】
【0002】
血液の生化学自動分析処理に際して、検体処理の省力化、検査結果のクイックレスポンス、検体への接触処理による感染防止などの要求から、検体が搭載された容器を遠心バケットにローディングし、バケットを吊り下げるロータを回転させて遠心分離工程を終了した後に、バケットから容器をアンローディングする前処理の自動遠心分離機が開発されてきた。 生化学分野においては、毎日のルーチン業務で使用され、分析機器との組合せで検体容器の形状は一定であり、特開平10−277435の図1,2、特開平11−276933の図7に示すように、検体の搭載された容器をライン上に移動し、特定位置で停止する方法で、容器の位置決めを実施しており、また、検体は血液の入ったチューブでありその容器は特開平11−276933の図3に示すように縦方向にある程度の長さがあり、上部を把持して直接遠心分離機内のバケットに搬入していた。
【0003】
一方、DNA等の遺伝子物質を分離・抽出するには、各種の試薬を注入して化学反応させる工程と遠心分離工程を繰り返す作業があり、各種の分注工程を自動化した自動機(以後自動分注機と呼ぶ)との接続が必要である。また、遺伝子物質の分離はマイクロプレートと呼ばれる検体容器が使用され、自動分注機側から検体容器を特定の場所にセットした後に、特開2000−176317の図1に示すように自動遠心分離装置側のハンドリング機構が、直接容器の搬入、遠心、搬出戻しを実施する工程となる。
【0004】
遺伝子物質の分離,抽出作業は、研究レベルの場合が多く、一社で全体のシステムとして構成される場合が少なく、各社の自動分注機やインキュベータ(恒温装置)等の外部装置との接続が避けられない状況にある。また、使用する検体容器(マイクロプレート)のウェル(サンプルをいれる穴)が浅いものや深い物がある。夫々の外部装置は信頼性向上に注力しているが、遠心分離時間の長い場合、また、途中で回転数を変更したり、回転,停止を繰り返して運転するような場合、最終顧客は動作中のサンプル状態を確認したい場合がある。また、運転を中断した場合は、簡単にサンプルの状態が確認したいとの要求がある。特に遠心分離機は安全性の点から遠心中はドアを閉じており、ドアを動作することが面倒である。
【0005】
【特許文献1】特開平10−277435
【特許文献2】特開平11−276933
【特許文献3】特開2000−176317
【発明の開示】
【発明が解決しようとする課題】
【0006】
上記したように、自動遠心分離機を組込んだシステム製品は顧客要求で運転途中でサンプル状態を確認することが有る。この要求に対応すると共に、顧客の作業を簡便にし、操作性の優れた自動遠心分離装置を提供することにある。
【0007】
これに対応するために、装置に運転中断用のスイッチを設け、スイッチ受付時には遠心分離を中断することとした。遠心運転が停止した時に(スイッチ受付時に遠心分離機が停止していた場合も)、ドアを開いて待機することとした。
【課題を解決するための手段】
【0008】
上記した課題を解決するために、外部装置からの指示に従い運転を実行するための制御機構を有しているので、制御プログラム内に運転中断信号の受信を検知したら、動作を停止して、その後にドアを開いて装置の状態が運転中断で待機状態であることを制御装置内に記憶することで可能となる。
【発明の効果】
【0009】
本発明によれば、各種の装置と接続し、検体の遠心分離を実施する自動遠心機において、処理途中でのサンプル状態を簡便に確認することができる。
【発明を実施するための最良の形態】
【0010】
本発明の実施例について図面を参照しながら説明する。
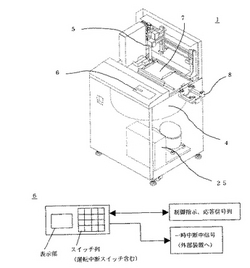
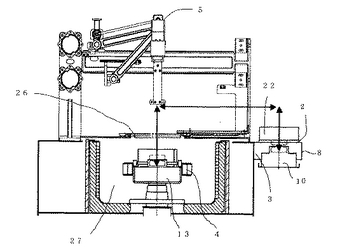
図1は自動遠心分離装置1の斜視図、図11は自動遠心分離装置1の一部断面図である。自動遠心分離装置1は、遠心分離機4、保持容器10、搬送手段5、ドア7、容器ポート8、冷凍機25、搬入/搬出口26を有した回転体室27などから構成され、さらに操作6と、図示していない制御部によって遠心分離装置が制御される。
【0011】
遠心分離機4は回転することにより検体容器22を遠心し検体の分離を行う。
搬送手段5は保持容器10を容器ポート8と遠心分離機4内のバケット13との間で搬送する。また、搬送手段5はドア7の開閉、および遠心時におけるドア7の固定を行っている。
【0012】
冷凍機25は図示していない制御部からのON・OFF制御により遠心する検体の温度制御を行っている。
詳細は図示していないが、自動遠心分離装置1の図示していない制御部は通信装置を有し、外部装置と通信回線で制御可能な様に接続されている。また、操作の詳細は示さないが、遠心分離機単体での運転・動作確認用の運転が可能なようにローカル(外部装置からの指示ではなく単体として機能する)運転ができるようスイッチ・表示機能を有している。操作に運転中断を指示するスイッチを設けると共に、運転が一時中断中である事を示す一時中断中信号を外部装置へ出力する。
【0013】
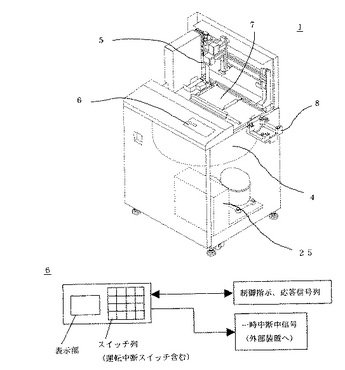
図2は容器ポート8を示す図である。容器ポート8は自動分注機との検体容器22の受け渡し場所としての役割をもち、検体容器22をセットする検体容器授受部2、保持容器10をセットする保持容器授受部3、検体容器22のセットを検出する透過形センサー9、保持容器10のセットを検出する透過形センサー23から構成されている。
【0014】
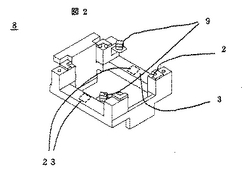
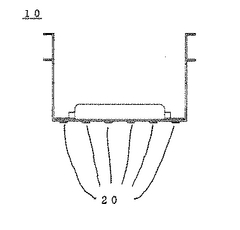
図3は保持容器10を示す図である。保持容器10は検体容器22を搭載する役割を持ち、側面穴部11、溝部12を有したフック24および図6に示す底面凸部20が設けてある。側面穴部11は遠心によって回転体室27内に発生した風圧による曲げ応力を低減させるために設けてある。また、底面凸部20は、バケット13との接触面積を小さくすることにより、保持容器10搬出の際、バケット13に溜まった液体が原因で発生する表面張力を低減させる役割を持っている。フック24はフィンガ18にて保持容器10を支持する部位である。
【0015】
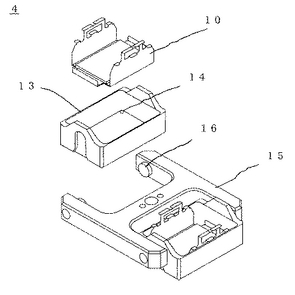
図4は遠心分離機4を示す図である。遠心分離機4は回転体15、バケット13から構成されている。バケット13は、回転体15に固定されているピン16により円筒支持されており、図に示していないモータにより駆動される。モータの駆動により回転体15は回転し、バケット13は遠心力によりピン16を中心に外周方向にスイングする。また、バケット13には貫通穴部14が設けてある。貫通穴部14は、冷凍機25の冷却による結露水や搬送時において検体容器22からこぼれて溜まったバケット13内の液体を遠心力によってバケット13から外に排出するために設けてある。
【0016】
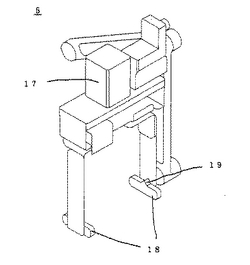
図5は搬送手段5を示す図である。搬送手段5は図に示していない2個のモータ駆動により前後,上下方向に移動する。またモータ17の駆動により突起部19を有するフィンガ18が開閉し、保持容器10を支持、解放する。
【0017】
保持容器10支持方法は、搬送手段5がフィンガ18を開いた状態で、遠心分離機4内および容器ポート8の保持容器10の掴み・放し位置に移動し、フィンガ18を閉じ上方向に移動する。この時フィンガ18の突起部19は、上方向移動により保持容器10の溝部12に収まり、フィンガ18の上面にて保持容器10のフック24を支持する。また、保持容器10の解放方法は、保持容器10支持方法の逆の手順で行われている。突起部19と溝部12の勘合は、搬送手段5の前後方向移動に伴う慣性力による保持容器の移動を抑えている。
【0018】
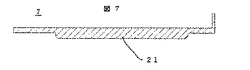
図7はドア7の断面図を示す。ドア7には凸部21を設けてある。凸部21はドア7閉鎖時において回転体室27の搬入/搬出口26に収まり、回転体室27に対してできるだけ凹部が小さく平滑となる形状となっている。これは、遠心時に回転体室27内で発生する空気の攪拌に伴う摩擦熱を防ぐ為である。
【0019】
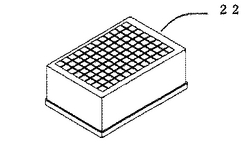
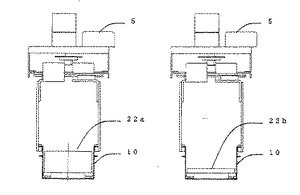
図8は検体容器22の斜視図である。
図9は厚い検体容器22a、および、薄い検体容器22bを搭載した保持容器10の搬送状態を示している。検体容器22の厚さにかかわらず同じ条件で搬送が可能となっている。
【0020】
次に装置の具体的な動作例について説明する。
まず、保持容器10は運転前に予めバケット13に載置しておく。
外部装置より第1の指令が発せられ、自動遠心分離装置1は、搬送手段5を移動させ、フィンガ18にてドア7をスライドさせて搬入/搬出口26を開放する。次に搬送手段5は、遠心分離機4内の保持容器10を保持容器授受部3に搬送し外部装置側と干渉しない位置に待機する。搬送後、透過型センサー23の信号により保持容器10のセットを確認し、外部装置に対し指令完了を送信する。
【0021】
外部装置側では、検体容器22を検体容器授受部にセットし、指令2を送信する。
自動遠心分離装置1側では、透過型センサー9にて検体容器22のセットを確認する。正しくセットされていれば、搬送手段5を用いて保持容器10を遠心分離機4内のバケット13に搬送する。この時に、検体容器授受部2の検体容器22は保持容器10に搭載される。搬送後、搬送手段5は、遠心分離機4およびドア7が干渉しない位置まで移動して指令2完了を送信する。当該第1,2指令に伴う動作を偶数回実施して、遠心分離機4内のバランスを保つ。
【0022】
外部装置側からの第3の指令が発せられると、自動遠心分離装置1は搬送手段5を移動させ、フィンガ18にてドア7をスライドさせて搬入/搬出口26を閉鎖する。閉鎖後、搬送手段5はフィンガ18底面が、ドア7の上面中央部に接触する位置に移動しドア7を押さえる。ドア7押さえ動作は、遠心によって回転室27内に発生する風圧によるドア7浮き上がり防止、および、回転体15駆動に伴う搬送手段5の振動防止の役割を果たしている。次に外部装置から既に発せられた第3の指令での運転条件(回転速度、遠心速度、設定温度)に従い、遠心を開始する。遠心が終了すると、自動遠心分離装置1は搬送手段5を移動し、フィンガ18にてドア7をスライドさせ、搬入/搬出口26を開放し、第3指令完了を送信する。
【0023】
外部装置側からの第4指令が発せられると、自動遠心分離装置1は、搬送手段5を用いて、遠心分離機4内のバケット13から保持容器10を保持容器授受部3に搬送する。途中、保持容器10に搭載されている検体容器22は、検体容器授受部2にセットされる。その後、搬送手段5は外部装置と干渉しない位置に待機し、外部装置に対し第4指令完了を送信する。
【0024】
外部装置側では、検体容器22を検体容器授受部2から搬出し、第5指令を送信する。
自動遠心分離装置1は、搬送手段5を用いて、保持容器10を保持容器授受部3から遠心分離機4内のバケット13に搬送し、第5指令完了を送信する。
【0025】
当該第4,5指令を偶数回実施し自動遠心分離装置1側の全容器を処理する。
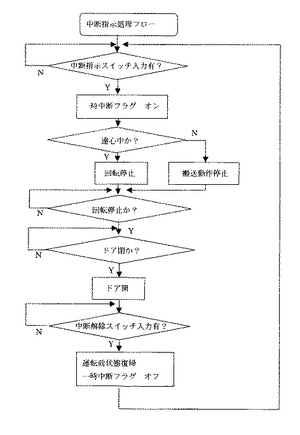
運転処理中にサンプルの状況を簡便に確認することができる本考案の一実施例は、図10に当該処理のフローチャートを示すように、操作に運転中断の指示するスイッチを設け、当該スイッチの入力(スイッチを押圧)時に、制御部は遠心分離運転を中止し、停止後にドアを開いて待機状態とすることで達成できる。当該スイッチを受けつけた時は、一時中断フラグを内部記憶素子に記憶するとともに、外部装置に一時中断フラグ信号を送出することにより、上位装置は自動遠心機の状態を把握し、必要な処理を実行することが可能となる。
【0026】
例えば、遠心分離機1の制御部は設定された運転条件を記憶しており、さらに中断スイッチが押されるまでの運転状態を遠心分離機1の図示していない記憶装置に記憶することができる。例えば設定された運転時間から中断スイッチが押されるまでの運転時間(経過時間)を前記記憶装置に記憶し、設定時間から経過時間を差し引きことで、運転時間の残りの時間を算出することができ、再スタートの処理がされたとき、遠心分離機1の制御部は算出された残り時間を運転することができる。尚、設定された運転時間を運転開始からの経過時間によってカウントダウンし、残り時間を遠心分離機1の図示していない記憶装置に記憶しておいても同様の効果が得られる。
【0027】
尚、遠心機側に設けたスイッチに相当する信号を外部装置から受信することで、同様の処理を実施できることは、当該技術を有するもので有れば、理解できる。
【0028】
更に、外部装置による搬入・搬出機構を組込んだシステム品において、自動開閉ドアとロータの位置だし機能を有するだけの自動遠心分離機であっても、同様の処理を実施できることは、当該技術を有するもので有れば、理解できる。
【図面の簡単な説明】
【0029】
【図1】本発明の一実施例を示す自動遠心分離装置の斜視図及び操作部。
【図2】検体容器と検体保持容器とのセット部。
【図3】保持容器。
【図4】遠心分離機用ロータ。
【図5】搬送手段。
【図6】保持容器側面図。
【図7】ドア断面図。
【図8】検体容器。
【図9】検体容器を搭載した保持容器の状態図。
【図10】本発明の一実施例を示す運転中断の動作を示す処理例。
【図11】本発明の一実施例を示す自動遠心分離装置の横断図。
【符号の説明】
【0030】
図において、1は自動遠心分離装置、2は検体容器授受部、3は保持容器授受部、4は遠心分離機、5は搬送手段、6は操作/制御部、7はドア、8は容器ポート、9は透過型センサー、10は保持容器、11は保持容器側面穴部、12は保持容器フック溝部、13はバケット、14はバケット貫通穴部、15は回転体、16はピン、17はモータ、18はフィンガ、19はフィンガ突起部、20は保持容器底面凸部、21はドア凸部、22は検体容器、22aは厚い検体容器、22bは薄い検体容器、23は透過型センサー、24は保持容器フック部、25は冷凍機、26は回転体室の搬入/搬出口、27は回転体室である。
【技術分野】
【0001】
本発明は、医学・農学・薬学・理学などの分野で細胞・核酸などの有用物質の分離を自動で搬入・遠心・搬出を行う自動遠心分離装置における操作性に関するものである。
【背景技術】
【0002】
血液の生化学自動分析処理に際して、検体処理の省力化、検査結果のクイックレスポンス、検体への接触処理による感染防止などの要求から、検体が搭載された容器を遠心バケットにローディングし、バケットを吊り下げるロータを回転させて遠心分離工程を終了した後に、バケットから容器をアンローディングする前処理の自動遠心分離機が開発されてきた。 生化学分野においては、毎日のルーチン業務で使用され、分析機器との組合せで検体容器の形状は一定であり、特開平10−277435の図1,2、特開平11−276933の図7に示すように、検体の搭載された容器をライン上に移動し、特定位置で停止する方法で、容器の位置決めを実施しており、また、検体は血液の入ったチューブでありその容器は特開平11−276933の図3に示すように縦方向にある程度の長さがあり、上部を把持して直接遠心分離機内のバケットに搬入していた。
【0003】
一方、DNA等の遺伝子物質を分離・抽出するには、各種の試薬を注入して化学反応させる工程と遠心分離工程を繰り返す作業があり、各種の分注工程を自動化した自動機(以後自動分注機と呼ぶ)との接続が必要である。また、遺伝子物質の分離はマイクロプレートと呼ばれる検体容器が使用され、自動分注機側から検体容器を特定の場所にセットした後に、特開2000−176317の図1に示すように自動遠心分離装置側のハンドリング機構が、直接容器の搬入、遠心、搬出戻しを実施する工程となる。
【0004】
遺伝子物質の分離,抽出作業は、研究レベルの場合が多く、一社で全体のシステムとして構成される場合が少なく、各社の自動分注機やインキュベータ(恒温装置)等の外部装置との接続が避けられない状況にある。また、使用する検体容器(マイクロプレート)のウェル(サンプルをいれる穴)が浅いものや深い物がある。夫々の外部装置は信頼性向上に注力しているが、遠心分離時間の長い場合、また、途中で回転数を変更したり、回転,停止を繰り返して運転するような場合、最終顧客は動作中のサンプル状態を確認したい場合がある。また、運転を中断した場合は、簡単にサンプルの状態が確認したいとの要求がある。特に遠心分離機は安全性の点から遠心中はドアを閉じており、ドアを動作することが面倒である。
【0005】
【特許文献1】特開平10−277435
【特許文献2】特開平11−276933
【特許文献3】特開2000−176317
【発明の開示】
【発明が解決しようとする課題】
【0006】
上記したように、自動遠心分離機を組込んだシステム製品は顧客要求で運転途中でサンプル状態を確認することが有る。この要求に対応すると共に、顧客の作業を簡便にし、操作性の優れた自動遠心分離装置を提供することにある。
【0007】
これに対応するために、装置に運転中断用のスイッチを設け、スイッチ受付時には遠心分離を中断することとした。遠心運転が停止した時に(スイッチ受付時に遠心分離機が停止していた場合も)、ドアを開いて待機することとした。
【課題を解決するための手段】
【0008】
上記した課題を解決するために、外部装置からの指示に従い運転を実行するための制御機構を有しているので、制御プログラム内に運転中断信号の受信を検知したら、動作を停止して、その後にドアを開いて装置の状態が運転中断で待機状態であることを制御装置内に記憶することで可能となる。
【発明の効果】
【0009】
本発明によれば、各種の装置と接続し、検体の遠心分離を実施する自動遠心機において、処理途中でのサンプル状態を簡便に確認することができる。
【発明を実施するための最良の形態】
【0010】
本発明の実施例について図面を参照しながら説明する。
図1は自動遠心分離装置1の斜視図、図11は自動遠心分離装置1の一部断面図である。自動遠心分離装置1は、遠心分離機4、保持容器10、搬送手段5、ドア7、容器ポート8、冷凍機25、搬入/搬出口26を有した回転体室27などから構成され、さらに操作6と、図示していない制御部によって遠心分離装置が制御される。
【0011】
遠心分離機4は回転することにより検体容器22を遠心し検体の分離を行う。
搬送手段5は保持容器10を容器ポート8と遠心分離機4内のバケット13との間で搬送する。また、搬送手段5はドア7の開閉、および遠心時におけるドア7の固定を行っている。
【0012】
冷凍機25は図示していない制御部からのON・OFF制御により遠心する検体の温度制御を行っている。
詳細は図示していないが、自動遠心分離装置1の図示していない制御部は通信装置を有し、外部装置と通信回線で制御可能な様に接続されている。また、操作の詳細は示さないが、遠心分離機単体での運転・動作確認用の運転が可能なようにローカル(外部装置からの指示ではなく単体として機能する)運転ができるようスイッチ・表示機能を有している。操作に運転中断を指示するスイッチを設けると共に、運転が一時中断中である事を示す一時中断中信号を外部装置へ出力する。
【0013】
図2は容器ポート8を示す図である。容器ポート8は自動分注機との検体容器22の受け渡し場所としての役割をもち、検体容器22をセットする検体容器授受部2、保持容器10をセットする保持容器授受部3、検体容器22のセットを検出する透過形センサー9、保持容器10のセットを検出する透過形センサー23から構成されている。
【0014】
図3は保持容器10を示す図である。保持容器10は検体容器22を搭載する役割を持ち、側面穴部11、溝部12を有したフック24および図6に示す底面凸部20が設けてある。側面穴部11は遠心によって回転体室27内に発生した風圧による曲げ応力を低減させるために設けてある。また、底面凸部20は、バケット13との接触面積を小さくすることにより、保持容器10搬出の際、バケット13に溜まった液体が原因で発生する表面張力を低減させる役割を持っている。フック24はフィンガ18にて保持容器10を支持する部位である。
【0015】
図4は遠心分離機4を示す図である。遠心分離機4は回転体15、バケット13から構成されている。バケット13は、回転体15に固定されているピン16により円筒支持されており、図に示していないモータにより駆動される。モータの駆動により回転体15は回転し、バケット13は遠心力によりピン16を中心に外周方向にスイングする。また、バケット13には貫通穴部14が設けてある。貫通穴部14は、冷凍機25の冷却による結露水や搬送時において検体容器22からこぼれて溜まったバケット13内の液体を遠心力によってバケット13から外に排出するために設けてある。
【0016】
図5は搬送手段5を示す図である。搬送手段5は図に示していない2個のモータ駆動により前後,上下方向に移動する。またモータ17の駆動により突起部19を有するフィンガ18が開閉し、保持容器10を支持、解放する。
【0017】
保持容器10支持方法は、搬送手段5がフィンガ18を開いた状態で、遠心分離機4内および容器ポート8の保持容器10の掴み・放し位置に移動し、フィンガ18を閉じ上方向に移動する。この時フィンガ18の突起部19は、上方向移動により保持容器10の溝部12に収まり、フィンガ18の上面にて保持容器10のフック24を支持する。また、保持容器10の解放方法は、保持容器10支持方法の逆の手順で行われている。突起部19と溝部12の勘合は、搬送手段5の前後方向移動に伴う慣性力による保持容器の移動を抑えている。
【0018】
図7はドア7の断面図を示す。ドア7には凸部21を設けてある。凸部21はドア7閉鎖時において回転体室27の搬入/搬出口26に収まり、回転体室27に対してできるだけ凹部が小さく平滑となる形状となっている。これは、遠心時に回転体室27内で発生する空気の攪拌に伴う摩擦熱を防ぐ為である。
【0019】
図8は検体容器22の斜視図である。
図9は厚い検体容器22a、および、薄い検体容器22bを搭載した保持容器10の搬送状態を示している。検体容器22の厚さにかかわらず同じ条件で搬送が可能となっている。
【0020】
次に装置の具体的な動作例について説明する。
まず、保持容器10は運転前に予めバケット13に載置しておく。
外部装置より第1の指令が発せられ、自動遠心分離装置1は、搬送手段5を移動させ、フィンガ18にてドア7をスライドさせて搬入/搬出口26を開放する。次に搬送手段5は、遠心分離機4内の保持容器10を保持容器授受部3に搬送し外部装置側と干渉しない位置に待機する。搬送後、透過型センサー23の信号により保持容器10のセットを確認し、外部装置に対し指令完了を送信する。
【0021】
外部装置側では、検体容器22を検体容器授受部にセットし、指令2を送信する。
自動遠心分離装置1側では、透過型センサー9にて検体容器22のセットを確認する。正しくセットされていれば、搬送手段5を用いて保持容器10を遠心分離機4内のバケット13に搬送する。この時に、検体容器授受部2の検体容器22は保持容器10に搭載される。搬送後、搬送手段5は、遠心分離機4およびドア7が干渉しない位置まで移動して指令2完了を送信する。当該第1,2指令に伴う動作を偶数回実施して、遠心分離機4内のバランスを保つ。
【0022】
外部装置側からの第3の指令が発せられると、自動遠心分離装置1は搬送手段5を移動させ、フィンガ18にてドア7をスライドさせて搬入/搬出口26を閉鎖する。閉鎖後、搬送手段5はフィンガ18底面が、ドア7の上面中央部に接触する位置に移動しドア7を押さえる。ドア7押さえ動作は、遠心によって回転室27内に発生する風圧によるドア7浮き上がり防止、および、回転体15駆動に伴う搬送手段5の振動防止の役割を果たしている。次に外部装置から既に発せられた第3の指令での運転条件(回転速度、遠心速度、設定温度)に従い、遠心を開始する。遠心が終了すると、自動遠心分離装置1は搬送手段5を移動し、フィンガ18にてドア7をスライドさせ、搬入/搬出口26を開放し、第3指令完了を送信する。
【0023】
外部装置側からの第4指令が発せられると、自動遠心分離装置1は、搬送手段5を用いて、遠心分離機4内のバケット13から保持容器10を保持容器授受部3に搬送する。途中、保持容器10に搭載されている検体容器22は、検体容器授受部2にセットされる。その後、搬送手段5は外部装置と干渉しない位置に待機し、外部装置に対し第4指令完了を送信する。
【0024】
外部装置側では、検体容器22を検体容器授受部2から搬出し、第5指令を送信する。
自動遠心分離装置1は、搬送手段5を用いて、保持容器10を保持容器授受部3から遠心分離機4内のバケット13に搬送し、第5指令完了を送信する。
【0025】
当該第4,5指令を偶数回実施し自動遠心分離装置1側の全容器を処理する。
運転処理中にサンプルの状況を簡便に確認することができる本考案の一実施例は、図10に当該処理のフローチャートを示すように、操作に運転中断の指示するスイッチを設け、当該スイッチの入力(スイッチを押圧)時に、制御部は遠心分離運転を中止し、停止後にドアを開いて待機状態とすることで達成できる。当該スイッチを受けつけた時は、一時中断フラグを内部記憶素子に記憶するとともに、外部装置に一時中断フラグ信号を送出することにより、上位装置は自動遠心機の状態を把握し、必要な処理を実行することが可能となる。
【0026】
例えば、遠心分離機1の制御部は設定された運転条件を記憶しており、さらに中断スイッチが押されるまでの運転状態を遠心分離機1の図示していない記憶装置に記憶することができる。例えば設定された運転時間から中断スイッチが押されるまでの運転時間(経過時間)を前記記憶装置に記憶し、設定時間から経過時間を差し引きことで、運転時間の残りの時間を算出することができ、再スタートの処理がされたとき、遠心分離機1の制御部は算出された残り時間を運転することができる。尚、設定された運転時間を運転開始からの経過時間によってカウントダウンし、残り時間を遠心分離機1の図示していない記憶装置に記憶しておいても同様の効果が得られる。
【0027】
尚、遠心機側に設けたスイッチに相当する信号を外部装置から受信することで、同様の処理を実施できることは、当該技術を有するもので有れば、理解できる。
【0028】
更に、外部装置による搬入・搬出機構を組込んだシステム品において、自動開閉ドアとロータの位置だし機能を有するだけの自動遠心分離機であっても、同様の処理を実施できることは、当該技術を有するもので有れば、理解できる。
【図面の簡単な説明】
【0029】
【図1】本発明の一実施例を示す自動遠心分離装置の斜視図及び操作部。
【図2】検体容器と検体保持容器とのセット部。
【図3】保持容器。
【図4】遠心分離機用ロータ。
【図5】搬送手段。
【図6】保持容器側面図。
【図7】ドア断面図。
【図8】検体容器。
【図9】検体容器を搭載した保持容器の状態図。
【図10】本発明の一実施例を示す運転中断の動作を示す処理例。
【図11】本発明の一実施例を示す自動遠心分離装置の横断図。
【符号の説明】
【0030】
図において、1は自動遠心分離装置、2は検体容器授受部、3は保持容器授受部、4は遠心分離機、5は搬送手段、6は操作/制御部、7はドア、8は容器ポート、9は透過型センサー、10は保持容器、11は保持容器側面穴部、12は保持容器フック溝部、13はバケット、14はバケット貫通穴部、15は回転体、16はピン、17はモータ、18はフィンガ、19はフィンガ突起部、20は保持容器底面凸部、21はドア凸部、22は検体容器、22aは厚い検体容器、22bは薄い検体容器、23は透過型センサー、24は保持容器フック部、25は冷凍機、26は回転体室の搬入/搬出口、27は回転体室である。
【特許請求の範囲】
【請求項1】
遠心分離機と、該遠心分離機により遠心分離される複数の被遠心分離検体とを納めた検体容器と、該検体容器を授受する容器ポートと、該容器ポートと該遠心分離機との間で該検体容器の搬送を行う搬送手段とを有し、外部装置から動作指示信号を受信し、また、外部装置との状態情報の授受を行う通信回線と制御機構を有する自動遠心分離装置であって、運転中断スイッチと一時中断中信号出力端子とを有することを特徴とする自動遠心分離装置。
【請求項2】
請求項1の自動遠心分離装置において、運転中断スイッチからの信号受信時には遠心動作を停止して、検体容器を出し入れするドアを開いて待機することを特徴とする自動遠心分離装置。
【請求項3】
請求項1、2の自動遠心分離装置において、運転中断信号による遠心機の減速中、停止後のドア開中、待機中は一時中断中信号を発することを特徴とする自動遠心分離装置。
【請求項1】
遠心分離機と、該遠心分離機により遠心分離される複数の被遠心分離検体とを納めた検体容器と、該検体容器を授受する容器ポートと、該容器ポートと該遠心分離機との間で該検体容器の搬送を行う搬送手段とを有し、外部装置から動作指示信号を受信し、また、外部装置との状態情報の授受を行う通信回線と制御機構を有する自動遠心分離装置であって、運転中断スイッチと一時中断中信号出力端子とを有することを特徴とする自動遠心分離装置。
【請求項2】
請求項1の自動遠心分離装置において、運転中断スイッチからの信号受信時には遠心動作を停止して、検体容器を出し入れするドアを開いて待機することを特徴とする自動遠心分離装置。
【請求項3】
請求項1、2の自動遠心分離装置において、運転中断信号による遠心機の減速中、停止後のドア開中、待機中は一時中断中信号を発することを特徴とする自動遠心分離装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2006−68669(P2006−68669A)
【公開日】平成18年3月16日(2006.3.16)
【国際特許分類】
【出願番号】特願2004−256985(P2004−256985)
【出願日】平成16年9月3日(2004.9.3)
【出願人】(000005094)日立工機株式会社 (1,861)
【Fターム(参考)】
【公開日】平成18年3月16日(2006.3.16)
【国際特許分類】
【出願日】平成16年9月3日(2004.9.3)
【出願人】(000005094)日立工機株式会社 (1,861)
【Fターム(参考)】
[ Back to top ]