
自動駐車システム
【課題】 駐車場内での車両の誘導から空き駐車区画への駐車までの一連の車両走行動作を完全に自動化することにより、空き駐車区画への車両誘導を正確且つ迅速に行うこと。
【解決手段】 駐車管理センタ3は、駐車場入口から進入した車両2に対して、空き駐車区画内の車両停止位置までの車両走行経路(a〜fの何れか)に対応した経緯度情報を含む経路情報を送信する。車両2には、自車両の現在位置を示す測位情報を高精度測位する測位情報検知手段5及び6が搭載されていると共に、それら測位情報により示される車両現在位置と前記経路情報により示される車両走行経路との照合に基づいて車両2を当該車両走行経路に沿って自動操舵走行させると共に、その車両2が空き駐車区画内の車両停止位置に到達したときに自動操舵走行を停止させる走行制御装置が搭載されている。
【解決手段】 駐車管理センタ3は、駐車場入口から進入した車両2に対して、空き駐車区画内の車両停止位置までの車両走行経路(a〜fの何れか)に対応した経緯度情報を含む経路情報を送信する。車両2には、自車両の現在位置を示す測位情報を高精度測位する測位情報検知手段5及び6が搭載されていると共に、それら測位情報により示される車両現在位置と前記経路情報により示される車両走行経路との照合に基づいて車両2を当該車両走行経路に沿って自動操舵走行させると共に、その車両2が空き駐車区画内の車両停止位置に到達したときに自動操舵走行を停止させる走行制御装置が搭載されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、駐車場内における空き駐車区画への車両の誘導並びに当該空き駐車区画への駐車の双方を完全に自動化した自動駐車システムに関する。
【背景技術】
【0002】
従来、駐車場内において車両を空き駐車区画まで誘導する車両誘導システムが種々提供されている。具体的には、例えば、空き駐車区画を検知するセンサ(赤外線センサ、超音波センサ、CCDカメラなど)を設置し、そのセンサにより検知した空き駐車区画までの経路を経路誘導板や車内の画面により表示する構成、或いは路面に埋め込まれた誘導灯により車両を空き駐車区画まで案内する構成としたシステムが提供されている(例えば特許文献1、2参照)。また、従来では、車両を駐車区画へ自動的に駐車させる手段も種々考えられており、例えば、CCDエリアセンサなどを利用して車両後方を撮影し、その撮影画像を利用して車両を駐車予定位置へ誘導する自動駐車装置(特許文献3参照)や、マーカなどの入口指定手段により指定された駐車区画の入口をCCDカメラを使用して認識すると共に、このように認識した入口を通って駐車予定位置へ至る車両走行軌跡を演算し、その演算結果に沿って車両を駐車予定位置まで自動操舵走行により移動させるようにした自動駐車装置(特許文献4参照)が提供されている。
【特許文献1】特開2001−222799号公報
【特許文献2】特開2004−118703号公報
【特許文献3】特開平5−143895号公報
【特許文献4】特開平10−269497号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
従来の車両誘導システムは、車両の運転者に対して空き駐車区画までの経路の表示或いは案内を行うだけであり、また、従来の自動駐車装置は、駐車区画への自動駐車を意識しただけのものであり、これらの車両誘導システム及び自動駐車装置の組み合わせでは、駐車場内での車両の誘導から空き駐車区画への駐車までの一連の車両走行動作を完全に自動化した本当の意味の自動駐車システムを実現できないという事情がある。また、例えば、大型ショッピングセンターの駐車場やスポーツ・コンサートなどのイベント会場周辺の大規模駐車場においては、空き駐車区画への車両の誘導を人手に頼って行っているのが現状であって、その誘導を正確且つ迅速に行うことが困難になるという事情があり、このため、車両の誘導が滞り気味になって周辺での交通渋滞の原因になるなどの問題点が指摘されている。
【0004】
本発明は上記事情に鑑みてなされたものであり、その目的は、駐車場内での車両の誘導から空き駐車区画への駐車までの一連の車両走行動作を完全に自動化することにより、空き駐車区画への車両誘導を正確且つ迅速に行い得るようになる自動駐車システムを提供することにある。
【課題を解決するための手段】
【0005】
請求項1記載の手段によれば、駐車管理手段は、駐車場内の空き駐車区画の有無を管理しており、空き駐車区画がある状態において車両が駐車場内に進入したときには、当該車両に対して空き駐車区画内の車両停止位置までの車両走行経路に対応した経緯度情報を含む経路情報を送信するようになる。この場合、上記車両側では、これに搭載された位置情報受信手段が上記経路情報を受信するようになり、また、同じく車両に搭載された測位情報検知手段が、車両の現在位置を示す測位情報を取得するようになる。車両に搭載された走行制御装置は、上記位置情報により示される車両現在位置と駐車管理手段から受信した経路情報により示される車両走行経路との照合に基づいて、車両を当該車両走行経路に沿って自動操舵走行させると共に、その車両が空き駐車区画内の車両停止位置に到達したときに自動操舵走行を停止させるようになり、これに応じて上記空き駐車区画への車両の駐車が完了する。つまり、駐車場内での車両の誘導から空き駐車区画への駐車までの一連の車両走行動作を完全に自動化した本当の意味の自動駐車システムを実現できるものであり、これにより空き駐車区画への車両誘導を正確且つ迅速に行い得るようになる。
【0006】
請求項2記載の手段によれば、駐車管理手段側では、駐車場内に進入した車両に対して空き駐車区画内の車両停止位置までの車両走行経路を示す経路情報を送信する際に、当該空き駐車区画に対応した経路情報をデータベースから読み出して送信するだけで良いから、その送信動作を迅速に完了させることができるようになり、システムの運用を円滑に行う上で有益となる。また、上記経路情報は、駐車場入口から駐車区画内の複数の車両停止位置までの車両走行経路を実際に測位した経緯度情報に基づいて作成されるものであるから、その経路情報に基づいた車両の自動操舵走行の信頼性が向上するようになり、この面からもシステムの運用を円滑に行う上で有益になる。
【0007】
請求項3記載の手段によれば、車両の自動操舵走行中において、その進行方向の所定範囲に障害物(歩行者、他の車両など)が存在した場合に、これが障害物検知手段により検知されるようになり、このような検知状態となったときには、走行制御装置による自動操舵走行が中断されて車両が停止されることになるから、システムの信頼性が阻害される事態を未然に防止できるようになる。
【発明を実施するための最良の形態】
【0008】
以下、本発明の一実施例について図面を参照しながら説明する。但し、本実施例では、駐車場へ進入(入庫)した車両の自動駐車を実行するのに必要な構成を中心に説明し、車両の出庫に関する構成については簡略に説明する。
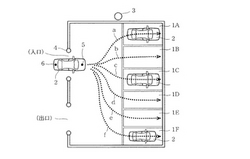
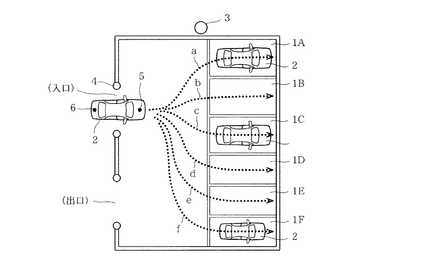
図4には、本実施例による自動駐車システムが適用された駐車場の平面レイアウトが模式的に示されている。尚、図4では自動駐車システムの基本原理を説明するために小規模な駐車場の例を示している。この図4において、駐車場内には、普通自動車用の駐車区画1A〜1Cと軽自動車用の駐車区画1D〜1Fとが設けられている。また、駐車場には、駐車場内の車両2と双方向通信可能に構成された駐車管理センタ3(駐車管理手段に相当)が設置されている共に、駐車場入口には、車両2の通過の有無を検知する車両通過確認手段4が駐車管理センタ3の構成要素として設置されている。
【0009】
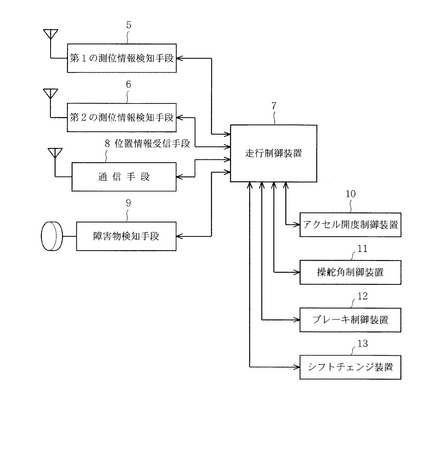
図1には、本実施例による自動駐車システムの構成のうち車両2側に搭載された部分のシステム構成が機能ブロックの組み合わせにより示されている。この図1において、第1の測位情報検知手段5及び第2の測位情報検知手段6は、例えばGPS受信機(システムに専用のものでも良いが、カーナビゲーション装置用に設けられたものでも良い)により構成されるもので、車両2上において互いに所定間隔を存した形態となるように予め設定された2箇所(例えば図4に示すように、車両2の前方部と後方部)の取り付け位置にそれぞれ配置される
これら第1及び第2の測位情報検知手段5及び6は、例えば、電子基準点を用いるRTK−GPSや、既知局からの補正データを用いるD−GPSのような高精度測位可能な手段により構成されるもので、従って、各測位情報検知手段5及び6においてそれぞれ受信したGPS信号と、各測位情報検知手段5及び6の取り付け位置を示す情報とに基づいて、車両2の現在位置並びに路面上における車両2の向き(例えば車両2のフロント・リア方向(進行方向)と絶対方位(例えば真北)との間の偏角)を高い精度で判定可能になる。
【0010】
この場合、第1及び第2の測位情報検知手段5及び6は、受信したGPS信号に基づいてリアルタイムに取得した各取り付け位置の現在位置を示す測位情報(経緯度情報)を走行制御装置7に与えるようになっており、この走行制御装置7では、受信した測位情報に基づいて車両2の現在位置及び路面上における車両2の向きを正確にリアルタイム判定する構成となっている。
【0011】
通信手段8(位置情報受信手段に相当)は、駐車管理センタ3との間で双方向無線通信を行うために設けられたもので、駐車管理センタ3側から後述のように送信されてくる経路情報を受信して走行制御装置7に与える構成となっている。また、通信手段8は、走行制御装置7から出力される車両2の現在位置及び路面上における車両2の向きを示す情報(以下、これを車両位置情報と呼ぶ)を駐車管理センタ3へ送信する機能も備えている。
【0012】
障害物検知手段9は、例えばCCDカメラ、ミリ波或いはレーザレーダ、超音波センサなどを利用した自立的手法(或いはそれらを組み合わせた自立的手法)により障害物を検知できるように構成されるもので、自車両2の進行方向の所定範囲内に存在する障害物を検知したときに、その検知情報を走行制御装置7に与えるようになっている。
走行制御装置7は、コンピュータを主体に構成されたもので、上記第1及び第2の測位情報検知手段5及び6、通信手段8、障害物検知手段9からの情報並びに予め設定されたプログラムなどに基づいて、車両2を自動操舵走行させる際のアクセル開度、操舵角、ブレーキ踏み力、シフトチェンジについての各制御値を決定する機能を備えている。
【0013】
この走行制御装置7は、決定した各制御値に基づいて、車両2のためのアクセル開度制御装置10、操舵角制御装置11及びブレーキ制御装置12及びシフトチェンジ装置13の駆動制御を実行することにより、当該車両2の自動操舵走行を実現する構成となっている。尚、図示しないが、走行制御装置7には、自車両2の車速情報も与えられる構成となっている。
【0014】
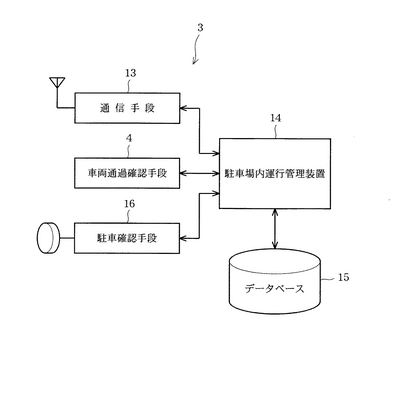
図2には、駐車管理センタ3の構成が機能ブロックの組み合わせにより示されている。この図2において、通信手段13は、車両2との間で双方向通信を行うために設けられたものであり、車両2側から受信した前記車両位置情報(車両2の現在位置及び路面上における車両2の向きを示す情報)を駐車場内運行管理装置14に与える構成となっている。また、通信手段13は、駐車場内運行管理装置14から後述のように与えられる経路情報を車両2へ送信する機能も備えている。
【0015】
この場合、上記経路情報は、駐車場入口から駐車区画1A〜1F内の車両停止位置までの各車両走行経路を経緯度情報により指示するためのものであり、例えば、駐車場入口から複数の駐車区画1A〜1F内の車両停止位置までの各車両走行経路a〜f(図4に破線で示す)上の複数の地点を実際に測位した経緯度情報に基づいて作成されるもので、各駐車区画1A〜1Fと対応付けた状態でデータベース15に格納されている。尚、上記経路情報は、実際に測位された車両走行経路a〜f上の複数の地点情報の組み合わせ、或いは当該複数の地点情報に対応した車両走行経路a〜fに係る曲線を示す関数により提供されることになる。
【0016】
駐車確認手段16は、駐車区画1A〜1Fでの駐車車両の有無を適宜手段(超音波センサなど)により検知できるように構成されたもので、駐車車両の有無を示す情報を駐車場内運行管理装置14に与えるようになっている。
駐車場内運行管理装置14は、コンピュータを主体に構成されたもので、駐車確認手段16からの情報に基づいて、駐車区画1A〜1Fについての空きの有無を管理しており、空き駐車区画が全くない場合には、例えば、駐車場入口に設けられた図示しない電光掲示板に「満車」の表示を行う構成、或いは駐車場入口に設けられた図示しないゲートを閉鎖するなどの構成となっている。この場合、軽自動車用の駐車区画1D〜1Fのみに空きがある場合、駐車場内運行管理装置14は、例えば、上記電光掲示板に「普通自動車満車・軽自動車駐車可」というような表示を行わせる。
【0017】
また、駐車場内運行管理装置14は、空き駐車区画がある状態で、車両通過確認手段4から車両2の通過を検知した旨の情報が与えられたときには、当該車両2から後述のように送信されてくる車両サイズ情報(車幅などの車両サイズを示す情報)を受信すると共に、その車両サイズ情報に基づいて、その車両2のサイズに適した空き駐車区画を選定し、このように選定した空き駐車区画に対応した経路情報をデータベース15から読み出し、その経路情報を通信手段13によって車両2へ送信する構成となっている。
【0018】
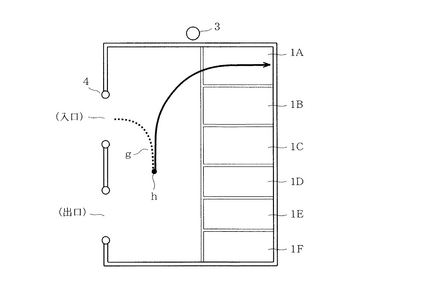
尚、図4の例では、駐車場入口から複数の駐車区画1A〜1F内の車両停止位置までの各車両走行経路a〜fを、所謂前進駐車を行うことを前提に設定したが、後退駐車を行うことが前提であった場合には、図5に一例を示すような車両走行経路gを設定すれば良い。尚、この図5に一例を示した車両走行経路gにおいては、破線で示した領域が車両2に対して前進走行を指示する経路、実線で示した領域が車両2に対して後退走行を指示する領域である。この場合、破線で示した領域を前進走行した後、h点で停止を確認後シフトチェンジし実線で示した領域で後退走行をする。また、シフトチェンジを自動でできない場合は制御装置から音声、ナビ画面を通じてシフトチェンジの指示を運転者に伝達しても良い。
【0019】
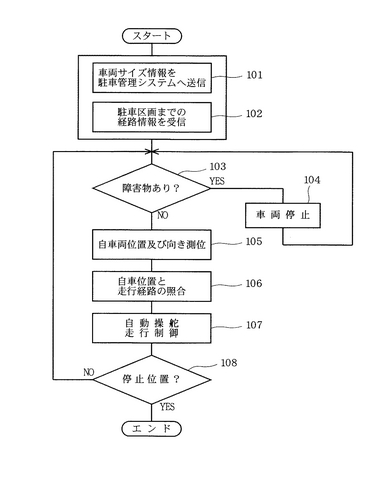
図3のフローチャートには、車両2側の走行制御装置7による制御内容のうち本発明の要旨に関係した部分が示されており、以下これについて説明する。
図3において、走行制御装置7は、例えば駐車場入口の通過を検知したとき、或いは車両2に設けられた図示しない通信ボタン(例えば駐車場への入庫時或いは出庫時に操作するために設けられたボタン)が操作されたときに、自車両2に係る車両サイズ情報を通信手段8により駐車管理センタ3へ送信する(ステップ101)。尚、上記駐車場入口の通過検知は種々の手段により実現可能であり、例えば、駐車管理センタ3側の車両通過確認手段4による検知情報を車両2に与えることにより行なうことができ、また、第1及び第2の測位情報検知手段5及び6からの測位情報と駐車場入口の位置情報とを照合することにより行なうこともできる。また、上記通信ボタンは、車両2の運転者が入庫しようとする駐車場の入口付近で操作するものである。
【0020】
上記ステップ101の実行に応じて車両サイズ情報が送信されたときには、前述したように、これを受信した駐車管理センタ3側では、車両2のサイズに適した空き駐車区画を選定し、このように選定した空き駐車区画に対応した経路情報をデータベース15から読み出して車両2へ送信するようになるものであり、走行制御装置7は、このようにアンさバックされる経路情報を受信する(ステップ102)。
【0021】
経路情報の受信後には、障害物検知手段9からの検知情報に基づいて自車両2の進行方向の所定範囲内に存在する障害物の有無を判断する(ステップ103)。障害物があった場合には、車両2の走行を停止し(ステップ104)、障害物がなくなるまで(ステップ103で「NO」と判断されるまで)待機する。尚、ステップ104では、車両2を直ちに停止させる必要なく、まず、車両2の速度を低下させる制御を行い、それでも引き続き障害物が存在する場合に初めて車両2を停止させるようにしても良いものである。
【0022】
障害物がない状態では、第1及び第2の測位情報検知手段5及び6からの測位情報に基づいて自車両2の現在位置及び路面上における自車両2の向きを測位し(ステップ105)、その測位情報と前記ステップ102で受信した経路情報とを照合し(ステップ106)、その照合結果に基づいて自車両を当該経路情報により示される車両走行経路に沿って自動操作走行するように制御する(ステップ107)。
【0023】
このような自動操作走行制御を行っている状態では、自車両2が指定された駐車区画内の車両停止位置まで移動したか否かを判断し(ステップ108)、車両停止位置まで移動していない状態ではステップ103以降の制御を繰り返し、自車両2が車両停止位置まで移動したときには、自動操舵走行制御を終了することにより、自車両2の移動を停止させる。
【0024】
尚、駐車車両2の出庫時には、その出庫の意思表示(例えば、当該車両2に設けられている通信ボタンの操作)が行われたときに、これを駐車管理センタへ送信する構成とし、駐車管理センタ側では、駐車区画に駐車している車両2から出庫の意思表示を受けたときに、その車両2に対して、当該車両が駐車している駐車区画から駐車場出口までの車両走行経路を指示する経路情報を送信する構成とすれば良い。
【0025】
要するに、上記した本実施例によれば、駐車場内の空き駐車区画の有無が駐車管理センタ3により管理されており、当該駐車管理センタ3は、空き駐車区画がある状態において車両2が駐車場内に進入したときには、当該車両2に対して空き駐車区画内の車両停止位置までの車両走行経路に対応した経緯度情報を含む経路情報を通信手段13を通じて送信するようになる。この場合、上記車両2側では、これに搭載された通信手段8が上記経路情報を受信するようになり、また、同じく車両2に搭載された第1及び第2の測位情報検知手段5及び6が、車両2の現在位置を示す測位情報を取得するようになる。車両2に搭載された走行制御装置7は、上記位置情報により示される車両現在位置と駐車管理センタ3から受信した経路情報により示される車両走行経路との照合に基づいて、車両2を当該車両走行経路に沿って自動操舵走行させると共に、その車両2が空き駐車区画内の車両停止位置に到達したときに自動操舵走行を停止させるようになり、これに応じて上記空き駐車区画への車両2の駐車が完了する。つまり、駐車場内での車両2の誘導から空き駐車区画への駐車までの一連の車両走行動作を完全に自動化した本当の意味の自動駐車システムを実現できるものであり、これにより空き駐車区画への車両2の誘導を正確且つ迅速に行い得るようになる。
【0026】
駐車管理センタ3側では、駐車場内に進入した車両2に対して空き駐車区画内の車両停止位置までの車両走行経路を示す経路情報を送信する際に、当該空き駐車区画に対応した経路情報をデータベース15から読み出して送信するだけで良いから、その送信動作を迅速に完了させることができるようになり、システムの運用を円滑に行う上で有益なる。また、上記経路情報は、駐車場入口から駐車区画(1A〜1F)内の複数の車両停止位置までの車両走行経路(a〜f)を実際に測位した経緯度情報に基づいて作成されるものであるから、その経路情報に基づいた車両2の自動操舵走行の信頼性が向上するようになり、この面からもシステムの運用を円滑に行う上で有益になる。さらに、車両2の自動操舵走行中において、その進行方向の所定範囲に障害物(歩行者、他の車両など)が存在した場合に、これが障害物検知手段9により検知されるようになり、このような検知状態となったときには、走行制御装置7による自動操舵走行が中断されて車両2が停止されることになるから、システムの信頼性が阻害される事態を未然に防止できるようになる。
【0027】
(その他の実施の形態)
本発明は上記した実施例に限定されるものではなく、例えば、以下に述べるような変形或いは拡大が可能である。
上記実施例では、小規模な駐車場を例にして説明したが、大規模駐車場にも容易に適用できる。具体的には、複数の駐車場入口から各駐車区画に至るまでの車両走行経路に経路情報並びに各駐車区画から複数の駐車場出口に至るまでの車両走行経路に対応した経路情報をデータベースに格納しておき、駐車管理センタ側において、このデータベースを参照することにより、各駐車場入口から進入した車両に対して空き駐車区画までの経路情報の提供、各駐車区画から駐車場出口までの経路情報の提供を一元化した状態で行なうことができる。この場合、駐車場内を走行中の全ての車両の位置を駐車管理センタ側で一括して把握することにより、車両走行経路の交差などを考慮しながら多数の車両について正確且つ迅速な経路誘導が可能になるから、従来のように、車両の誘導が滞り気味になって周辺での交通渋滞の原因になるなどの問題点を招く恐れがなくなる。
【0028】
上記実施例では、路面上における車両2の向き(進行方向)を判定するために第1及び第2測位情報検知手段5及び6を搭載する構成としたが、このような構成は必要に応じて採用すれば良い。即ち、一つの測位情報検知手段のみを搭載した構成であっても、その測位情報検知手段からの測位情報の経時変化に基づいて知ることができる車両の実際の移動方向を加味すれば車両の向きを判定可能になるから、本実施例のように測位情報検知手段を二つ設ける必要はないものである。
駐車管理センタ3側では、自身の管理内容(車両の入庫及出庫状況の管理)に基づいて空き駐車区画の有無を確認できるから、駐車確認手段16は特に必要ではない。
【図面の簡単な説明】
【0029】
【図1】本発明の一実施例を示す車両側システムの構成図
【図2】駐車管理センタの構成図
【図3】走行制御装置による制御内容を示すフローチャート
【図4】駐車場の模式的な平面図その1
【図5】駐車場の模式的な平面図その2
【符号の説明】
【0030】
1A〜1Fは駐車区画、2は車両、3は駐車管理センタ(駐車管理手段)、4は車両通過確認手段、5は第1の測位情報検知手段、6は第2の測位情報検知手段、7は走行制御装置、8は通信手段(位置情報受信手段)、9は障害物検知手段、14は駐車場内運行管理装置、15はデータベースを示す。
【技術分野】
【0001】
本発明は、駐車場内における空き駐車区画への車両の誘導並びに当該空き駐車区画への駐車の双方を完全に自動化した自動駐車システムに関する。
【背景技術】
【0002】
従来、駐車場内において車両を空き駐車区画まで誘導する車両誘導システムが種々提供されている。具体的には、例えば、空き駐車区画を検知するセンサ(赤外線センサ、超音波センサ、CCDカメラなど)を設置し、そのセンサにより検知した空き駐車区画までの経路を経路誘導板や車内の画面により表示する構成、或いは路面に埋め込まれた誘導灯により車両を空き駐車区画まで案内する構成としたシステムが提供されている(例えば特許文献1、2参照)。また、従来では、車両を駐車区画へ自動的に駐車させる手段も種々考えられており、例えば、CCDエリアセンサなどを利用して車両後方を撮影し、その撮影画像を利用して車両を駐車予定位置へ誘導する自動駐車装置(特許文献3参照)や、マーカなどの入口指定手段により指定された駐車区画の入口をCCDカメラを使用して認識すると共に、このように認識した入口を通って駐車予定位置へ至る車両走行軌跡を演算し、その演算結果に沿って車両を駐車予定位置まで自動操舵走行により移動させるようにした自動駐車装置(特許文献4参照)が提供されている。
【特許文献1】特開2001−222799号公報
【特許文献2】特開2004−118703号公報
【特許文献3】特開平5−143895号公報
【特許文献4】特開平10−269497号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
従来の車両誘導システムは、車両の運転者に対して空き駐車区画までの経路の表示或いは案内を行うだけであり、また、従来の自動駐車装置は、駐車区画への自動駐車を意識しただけのものであり、これらの車両誘導システム及び自動駐車装置の組み合わせでは、駐車場内での車両の誘導から空き駐車区画への駐車までの一連の車両走行動作を完全に自動化した本当の意味の自動駐車システムを実現できないという事情がある。また、例えば、大型ショッピングセンターの駐車場やスポーツ・コンサートなどのイベント会場周辺の大規模駐車場においては、空き駐車区画への車両の誘導を人手に頼って行っているのが現状であって、その誘導を正確且つ迅速に行うことが困難になるという事情があり、このため、車両の誘導が滞り気味になって周辺での交通渋滞の原因になるなどの問題点が指摘されている。
【0004】
本発明は上記事情に鑑みてなされたものであり、その目的は、駐車場内での車両の誘導から空き駐車区画への駐車までの一連の車両走行動作を完全に自動化することにより、空き駐車区画への車両誘導を正確且つ迅速に行い得るようになる自動駐車システムを提供することにある。
【課題を解決するための手段】
【0005】
請求項1記載の手段によれば、駐車管理手段は、駐車場内の空き駐車区画の有無を管理しており、空き駐車区画がある状態において車両が駐車場内に進入したときには、当該車両に対して空き駐車区画内の車両停止位置までの車両走行経路に対応した経緯度情報を含む経路情報を送信するようになる。この場合、上記車両側では、これに搭載された位置情報受信手段が上記経路情報を受信するようになり、また、同じく車両に搭載された測位情報検知手段が、車両の現在位置を示す測位情報を取得するようになる。車両に搭載された走行制御装置は、上記位置情報により示される車両現在位置と駐車管理手段から受信した経路情報により示される車両走行経路との照合に基づいて、車両を当該車両走行経路に沿って自動操舵走行させると共に、その車両が空き駐車区画内の車両停止位置に到達したときに自動操舵走行を停止させるようになり、これに応じて上記空き駐車区画への車両の駐車が完了する。つまり、駐車場内での車両の誘導から空き駐車区画への駐車までの一連の車両走行動作を完全に自動化した本当の意味の自動駐車システムを実現できるものであり、これにより空き駐車区画への車両誘導を正確且つ迅速に行い得るようになる。
【0006】
請求項2記載の手段によれば、駐車管理手段側では、駐車場内に進入した車両に対して空き駐車区画内の車両停止位置までの車両走行経路を示す経路情報を送信する際に、当該空き駐車区画に対応した経路情報をデータベースから読み出して送信するだけで良いから、その送信動作を迅速に完了させることができるようになり、システムの運用を円滑に行う上で有益となる。また、上記経路情報は、駐車場入口から駐車区画内の複数の車両停止位置までの車両走行経路を実際に測位した経緯度情報に基づいて作成されるものであるから、その経路情報に基づいた車両の自動操舵走行の信頼性が向上するようになり、この面からもシステムの運用を円滑に行う上で有益になる。
【0007】
請求項3記載の手段によれば、車両の自動操舵走行中において、その進行方向の所定範囲に障害物(歩行者、他の車両など)が存在した場合に、これが障害物検知手段により検知されるようになり、このような検知状態となったときには、走行制御装置による自動操舵走行が中断されて車両が停止されることになるから、システムの信頼性が阻害される事態を未然に防止できるようになる。
【発明を実施するための最良の形態】
【0008】
以下、本発明の一実施例について図面を参照しながら説明する。但し、本実施例では、駐車場へ進入(入庫)した車両の自動駐車を実行するのに必要な構成を中心に説明し、車両の出庫に関する構成については簡略に説明する。
図4には、本実施例による自動駐車システムが適用された駐車場の平面レイアウトが模式的に示されている。尚、図4では自動駐車システムの基本原理を説明するために小規模な駐車場の例を示している。この図4において、駐車場内には、普通自動車用の駐車区画1A〜1Cと軽自動車用の駐車区画1D〜1Fとが設けられている。また、駐車場には、駐車場内の車両2と双方向通信可能に構成された駐車管理センタ3(駐車管理手段に相当)が設置されている共に、駐車場入口には、車両2の通過の有無を検知する車両通過確認手段4が駐車管理センタ3の構成要素として設置されている。
【0009】
図1には、本実施例による自動駐車システムの構成のうち車両2側に搭載された部分のシステム構成が機能ブロックの組み合わせにより示されている。この図1において、第1の測位情報検知手段5及び第2の測位情報検知手段6は、例えばGPS受信機(システムに専用のものでも良いが、カーナビゲーション装置用に設けられたものでも良い)により構成されるもので、車両2上において互いに所定間隔を存した形態となるように予め設定された2箇所(例えば図4に示すように、車両2の前方部と後方部)の取り付け位置にそれぞれ配置される
これら第1及び第2の測位情報検知手段5及び6は、例えば、電子基準点を用いるRTK−GPSや、既知局からの補正データを用いるD−GPSのような高精度測位可能な手段により構成されるもので、従って、各測位情報検知手段5及び6においてそれぞれ受信したGPS信号と、各測位情報検知手段5及び6の取り付け位置を示す情報とに基づいて、車両2の現在位置並びに路面上における車両2の向き(例えば車両2のフロント・リア方向(進行方向)と絶対方位(例えば真北)との間の偏角)を高い精度で判定可能になる。
【0010】
この場合、第1及び第2の測位情報検知手段5及び6は、受信したGPS信号に基づいてリアルタイムに取得した各取り付け位置の現在位置を示す測位情報(経緯度情報)を走行制御装置7に与えるようになっており、この走行制御装置7では、受信した測位情報に基づいて車両2の現在位置及び路面上における車両2の向きを正確にリアルタイム判定する構成となっている。
【0011】
通信手段8(位置情報受信手段に相当)は、駐車管理センタ3との間で双方向無線通信を行うために設けられたもので、駐車管理センタ3側から後述のように送信されてくる経路情報を受信して走行制御装置7に与える構成となっている。また、通信手段8は、走行制御装置7から出力される車両2の現在位置及び路面上における車両2の向きを示す情報(以下、これを車両位置情報と呼ぶ)を駐車管理センタ3へ送信する機能も備えている。
【0012】
障害物検知手段9は、例えばCCDカメラ、ミリ波或いはレーザレーダ、超音波センサなどを利用した自立的手法(或いはそれらを組み合わせた自立的手法)により障害物を検知できるように構成されるもので、自車両2の進行方向の所定範囲内に存在する障害物を検知したときに、その検知情報を走行制御装置7に与えるようになっている。
走行制御装置7は、コンピュータを主体に構成されたもので、上記第1及び第2の測位情報検知手段5及び6、通信手段8、障害物検知手段9からの情報並びに予め設定されたプログラムなどに基づいて、車両2を自動操舵走行させる際のアクセル開度、操舵角、ブレーキ踏み力、シフトチェンジについての各制御値を決定する機能を備えている。
【0013】
この走行制御装置7は、決定した各制御値に基づいて、車両2のためのアクセル開度制御装置10、操舵角制御装置11及びブレーキ制御装置12及びシフトチェンジ装置13の駆動制御を実行することにより、当該車両2の自動操舵走行を実現する構成となっている。尚、図示しないが、走行制御装置7には、自車両2の車速情報も与えられる構成となっている。
【0014】
図2には、駐車管理センタ3の構成が機能ブロックの組み合わせにより示されている。この図2において、通信手段13は、車両2との間で双方向通信を行うために設けられたものであり、車両2側から受信した前記車両位置情報(車両2の現在位置及び路面上における車両2の向きを示す情報)を駐車場内運行管理装置14に与える構成となっている。また、通信手段13は、駐車場内運行管理装置14から後述のように与えられる経路情報を車両2へ送信する機能も備えている。
【0015】
この場合、上記経路情報は、駐車場入口から駐車区画1A〜1F内の車両停止位置までの各車両走行経路を経緯度情報により指示するためのものであり、例えば、駐車場入口から複数の駐車区画1A〜1F内の車両停止位置までの各車両走行経路a〜f(図4に破線で示す)上の複数の地点を実際に測位した経緯度情報に基づいて作成されるもので、各駐車区画1A〜1Fと対応付けた状態でデータベース15に格納されている。尚、上記経路情報は、実際に測位された車両走行経路a〜f上の複数の地点情報の組み合わせ、或いは当該複数の地点情報に対応した車両走行経路a〜fに係る曲線を示す関数により提供されることになる。
【0016】
駐車確認手段16は、駐車区画1A〜1Fでの駐車車両の有無を適宜手段(超音波センサなど)により検知できるように構成されたもので、駐車車両の有無を示す情報を駐車場内運行管理装置14に与えるようになっている。
駐車場内運行管理装置14は、コンピュータを主体に構成されたもので、駐車確認手段16からの情報に基づいて、駐車区画1A〜1Fについての空きの有無を管理しており、空き駐車区画が全くない場合には、例えば、駐車場入口に設けられた図示しない電光掲示板に「満車」の表示を行う構成、或いは駐車場入口に設けられた図示しないゲートを閉鎖するなどの構成となっている。この場合、軽自動車用の駐車区画1D〜1Fのみに空きがある場合、駐車場内運行管理装置14は、例えば、上記電光掲示板に「普通自動車満車・軽自動車駐車可」というような表示を行わせる。
【0017】
また、駐車場内運行管理装置14は、空き駐車区画がある状態で、車両通過確認手段4から車両2の通過を検知した旨の情報が与えられたときには、当該車両2から後述のように送信されてくる車両サイズ情報(車幅などの車両サイズを示す情報)を受信すると共に、その車両サイズ情報に基づいて、その車両2のサイズに適した空き駐車区画を選定し、このように選定した空き駐車区画に対応した経路情報をデータベース15から読み出し、その経路情報を通信手段13によって車両2へ送信する構成となっている。
【0018】
尚、図4の例では、駐車場入口から複数の駐車区画1A〜1F内の車両停止位置までの各車両走行経路a〜fを、所謂前進駐車を行うことを前提に設定したが、後退駐車を行うことが前提であった場合には、図5に一例を示すような車両走行経路gを設定すれば良い。尚、この図5に一例を示した車両走行経路gにおいては、破線で示した領域が車両2に対して前進走行を指示する経路、実線で示した領域が車両2に対して後退走行を指示する領域である。この場合、破線で示した領域を前進走行した後、h点で停止を確認後シフトチェンジし実線で示した領域で後退走行をする。また、シフトチェンジを自動でできない場合は制御装置から音声、ナビ画面を通じてシフトチェンジの指示を運転者に伝達しても良い。
【0019】
図3のフローチャートには、車両2側の走行制御装置7による制御内容のうち本発明の要旨に関係した部分が示されており、以下これについて説明する。
図3において、走行制御装置7は、例えば駐車場入口の通過を検知したとき、或いは車両2に設けられた図示しない通信ボタン(例えば駐車場への入庫時或いは出庫時に操作するために設けられたボタン)が操作されたときに、自車両2に係る車両サイズ情報を通信手段8により駐車管理センタ3へ送信する(ステップ101)。尚、上記駐車場入口の通過検知は種々の手段により実現可能であり、例えば、駐車管理センタ3側の車両通過確認手段4による検知情報を車両2に与えることにより行なうことができ、また、第1及び第2の測位情報検知手段5及び6からの測位情報と駐車場入口の位置情報とを照合することにより行なうこともできる。また、上記通信ボタンは、車両2の運転者が入庫しようとする駐車場の入口付近で操作するものである。
【0020】
上記ステップ101の実行に応じて車両サイズ情報が送信されたときには、前述したように、これを受信した駐車管理センタ3側では、車両2のサイズに適した空き駐車区画を選定し、このように選定した空き駐車区画に対応した経路情報をデータベース15から読み出して車両2へ送信するようになるものであり、走行制御装置7は、このようにアンさバックされる経路情報を受信する(ステップ102)。
【0021】
経路情報の受信後には、障害物検知手段9からの検知情報に基づいて自車両2の進行方向の所定範囲内に存在する障害物の有無を判断する(ステップ103)。障害物があった場合には、車両2の走行を停止し(ステップ104)、障害物がなくなるまで(ステップ103で「NO」と判断されるまで)待機する。尚、ステップ104では、車両2を直ちに停止させる必要なく、まず、車両2の速度を低下させる制御を行い、それでも引き続き障害物が存在する場合に初めて車両2を停止させるようにしても良いものである。
【0022】
障害物がない状態では、第1及び第2の測位情報検知手段5及び6からの測位情報に基づいて自車両2の現在位置及び路面上における自車両2の向きを測位し(ステップ105)、その測位情報と前記ステップ102で受信した経路情報とを照合し(ステップ106)、その照合結果に基づいて自車両を当該経路情報により示される車両走行経路に沿って自動操作走行するように制御する(ステップ107)。
【0023】
このような自動操作走行制御を行っている状態では、自車両2が指定された駐車区画内の車両停止位置まで移動したか否かを判断し(ステップ108)、車両停止位置まで移動していない状態ではステップ103以降の制御を繰り返し、自車両2が車両停止位置まで移動したときには、自動操舵走行制御を終了することにより、自車両2の移動を停止させる。
【0024】
尚、駐車車両2の出庫時には、その出庫の意思表示(例えば、当該車両2に設けられている通信ボタンの操作)が行われたときに、これを駐車管理センタへ送信する構成とし、駐車管理センタ側では、駐車区画に駐車している車両2から出庫の意思表示を受けたときに、その車両2に対して、当該車両が駐車している駐車区画から駐車場出口までの車両走行経路を指示する経路情報を送信する構成とすれば良い。
【0025】
要するに、上記した本実施例によれば、駐車場内の空き駐車区画の有無が駐車管理センタ3により管理されており、当該駐車管理センタ3は、空き駐車区画がある状態において車両2が駐車場内に進入したときには、当該車両2に対して空き駐車区画内の車両停止位置までの車両走行経路に対応した経緯度情報を含む経路情報を通信手段13を通じて送信するようになる。この場合、上記車両2側では、これに搭載された通信手段8が上記経路情報を受信するようになり、また、同じく車両2に搭載された第1及び第2の測位情報検知手段5及び6が、車両2の現在位置を示す測位情報を取得するようになる。車両2に搭載された走行制御装置7は、上記位置情報により示される車両現在位置と駐車管理センタ3から受信した経路情報により示される車両走行経路との照合に基づいて、車両2を当該車両走行経路に沿って自動操舵走行させると共に、その車両2が空き駐車区画内の車両停止位置に到達したときに自動操舵走行を停止させるようになり、これに応じて上記空き駐車区画への車両2の駐車が完了する。つまり、駐車場内での車両2の誘導から空き駐車区画への駐車までの一連の車両走行動作を完全に自動化した本当の意味の自動駐車システムを実現できるものであり、これにより空き駐車区画への車両2の誘導を正確且つ迅速に行い得るようになる。
【0026】
駐車管理センタ3側では、駐車場内に進入した車両2に対して空き駐車区画内の車両停止位置までの車両走行経路を示す経路情報を送信する際に、当該空き駐車区画に対応した経路情報をデータベース15から読み出して送信するだけで良いから、その送信動作を迅速に完了させることができるようになり、システムの運用を円滑に行う上で有益なる。また、上記経路情報は、駐車場入口から駐車区画(1A〜1F)内の複数の車両停止位置までの車両走行経路(a〜f)を実際に測位した経緯度情報に基づいて作成されるものであるから、その経路情報に基づいた車両2の自動操舵走行の信頼性が向上するようになり、この面からもシステムの運用を円滑に行う上で有益になる。さらに、車両2の自動操舵走行中において、その進行方向の所定範囲に障害物(歩行者、他の車両など)が存在した場合に、これが障害物検知手段9により検知されるようになり、このような検知状態となったときには、走行制御装置7による自動操舵走行が中断されて車両2が停止されることになるから、システムの信頼性が阻害される事態を未然に防止できるようになる。
【0027】
(その他の実施の形態)
本発明は上記した実施例に限定されるものではなく、例えば、以下に述べるような変形或いは拡大が可能である。
上記実施例では、小規模な駐車場を例にして説明したが、大規模駐車場にも容易に適用できる。具体的には、複数の駐車場入口から各駐車区画に至るまでの車両走行経路に経路情報並びに各駐車区画から複数の駐車場出口に至るまでの車両走行経路に対応した経路情報をデータベースに格納しておき、駐車管理センタ側において、このデータベースを参照することにより、各駐車場入口から進入した車両に対して空き駐車区画までの経路情報の提供、各駐車区画から駐車場出口までの経路情報の提供を一元化した状態で行なうことができる。この場合、駐車場内を走行中の全ての車両の位置を駐車管理センタ側で一括して把握することにより、車両走行経路の交差などを考慮しながら多数の車両について正確且つ迅速な経路誘導が可能になるから、従来のように、車両の誘導が滞り気味になって周辺での交通渋滞の原因になるなどの問題点を招く恐れがなくなる。
【0028】
上記実施例では、路面上における車両2の向き(進行方向)を判定するために第1及び第2測位情報検知手段5及び6を搭載する構成としたが、このような構成は必要に応じて採用すれば良い。即ち、一つの測位情報検知手段のみを搭載した構成であっても、その測位情報検知手段からの測位情報の経時変化に基づいて知ることができる車両の実際の移動方向を加味すれば車両の向きを判定可能になるから、本実施例のように測位情報検知手段を二つ設ける必要はないものである。
駐車管理センタ3側では、自身の管理内容(車両の入庫及出庫状況の管理)に基づいて空き駐車区画の有無を確認できるから、駐車確認手段16は特に必要ではない。
【図面の簡単な説明】
【0029】
【図1】本発明の一実施例を示す車両側システムの構成図
【図2】駐車管理センタの構成図
【図3】走行制御装置による制御内容を示すフローチャート
【図4】駐車場の模式的な平面図その1
【図5】駐車場の模式的な平面図その2
【符号の説明】
【0030】
1A〜1Fは駐車区画、2は車両、3は駐車管理センタ(駐車管理手段)、4は車両通過確認手段、5は第1の測位情報検知手段、6は第2の測位情報検知手段、7は走行制御装置、8は通信手段(位置情報受信手段)、9は障害物検知手段、14は駐車場内運行管理装置、15はデータベースを示す。
【特許請求の範囲】
【請求項1】
駐車場内の空き駐車区画の有無を管理すると共に、空き駐車区画がある状態において車両が駐車場内に進入したときには、当該車両に対して空き駐車区画内の車両停止位置までの車両走行経路に対応した経緯度情報を含む経路情報を送信する駐車管理手段を備え、
前記車両側には、
当該車両の現在位置を示す測位情報を取得する測位情報検知手段、
前記駐車管理手段から送信される前記経路情報を受信する位置情報受信手段、
前記測位情報により示される車両現在位置と前記経路情報により示される車両走行経路との照合に基づいて車両を当該車両走行経路に沿って自動操舵走行させると共に、その車両が前記空き駐車区画内の車両停止位置に到達したときに自動操舵走行を停止させる走行制御装置、
が搭載されることを特徴とする自動駐車システム。
【請求項2】
前記駐車管理手段は、駐車場入口から駐車区画内の車両停止位置までの各車両走行経路についての複数の経路情報を、当該車両走行経路上の複数の地点を実際に測位した経緯度情報に基づいて作成すると共に、それら経路情報をデータベース化した状態で有することを特徴とする請求項1記載の自動駐車システム。
【請求項3】
前記車両側には、車両進行方向の所定範囲内に存在する障害物を検知する障害物検知手段が搭載され、
前記走行制御装置は、前記障害物検知手段が検知状態となったときに前記自動操舵走行を中断して車両を停止させることを特徴とする請求項1または2記載の自動駐車システム。
【請求項1】
駐車場内の空き駐車区画の有無を管理すると共に、空き駐車区画がある状態において車両が駐車場内に進入したときには、当該車両に対して空き駐車区画内の車両停止位置までの車両走行経路に対応した経緯度情報を含む経路情報を送信する駐車管理手段を備え、
前記車両側には、
当該車両の現在位置を示す測位情報を取得する測位情報検知手段、
前記駐車管理手段から送信される前記経路情報を受信する位置情報受信手段、
前記測位情報により示される車両現在位置と前記経路情報により示される車両走行経路との照合に基づいて車両を当該車両走行経路に沿って自動操舵走行させると共に、その車両が前記空き駐車区画内の車両停止位置に到達したときに自動操舵走行を停止させる走行制御装置、
が搭載されることを特徴とする自動駐車システム。
【請求項2】
前記駐車管理手段は、駐車場入口から駐車区画内の車両停止位置までの各車両走行経路についての複数の経路情報を、当該車両走行経路上の複数の地点を実際に測位した経緯度情報に基づいて作成すると共に、それら経路情報をデータベース化した状態で有することを特徴とする請求項1記載の自動駐車システム。
【請求項3】
前記車両側には、車両進行方向の所定範囲内に存在する障害物を検知する障害物検知手段が搭載され、
前記走行制御装置は、前記障害物検知手段が検知状態となったときに前記自動操舵走行を中断して車両を停止させることを特徴とする請求項1または2記載の自動駐車システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2006−31412(P2006−31412A)
【公開日】平成18年2月2日(2006.2.2)
【国際特許分類】
【出願番号】特願2004−209425(P2004−209425)
【出願日】平成16年7月16日(2004.7.16)
【出願人】(000004695)株式会社日本自動車部品総合研究所 (1,981)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成18年2月2日(2006.2.2)
【国際特許分類】
【出願日】平成16年7月16日(2004.7.16)
【出願人】(000004695)株式会社日本自動車部品総合研究所 (1,981)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]