
自動駐車装置
【課題】インフラ設備が不要であり、且つ、自動走行中の演算処理負荷も少ない自動駐車装置を提供する。
【解決手段】車両が駐車完了位置に位置したか否かを判断する駐車完了判断手段102と、自動駐車開始条件が成立したか否かを判断する自動駐車開始判断手段108と、車両の挙動情報を、車両が駐車完了位置に位置したと判断されてから自動駐車開始条件が成立したと判断されるまで逐次取得して、記憶装置120に記憶する挙動情報取得手段104と、自動駐車開始条件が成立した場合に、記憶装置120に記憶されている挙動情報に基づいて、車両が駐車完了位置に位置したと判断されてから自動駐車開始条件が成立したと判断されるまでの車両の移動軌跡を逆方向に車両を自動走行させて、車両を前記駐車完了位置まで移動させる自動走行制御手段110とを備える。
【解決手段】車両が駐車完了位置に位置したか否かを判断する駐車完了判断手段102と、自動駐車開始条件が成立したか否かを判断する自動駐車開始判断手段108と、車両の挙動情報を、車両が駐車完了位置に位置したと判断されてから自動駐車開始条件が成立したと判断されるまで逐次取得して、記憶装置120に記憶する挙動情報取得手段104と、自動駐車開始条件が成立した場合に、記憶装置120に記憶されている挙動情報に基づいて、車両が駐車完了位置に位置したと判断されてから自動駐車開始条件が成立したと判断されるまでの車両の移動軌跡を逆方向に車両を自動走行させて、車両を前記駐車完了位置まで移動させる自動走行制御手段110とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自動駐車装置に関し、特に、駐車位置において他車両や壁などの障害物が自車両の側方に近接して存在する駐車スペースに自車両を駐車させる場合に好適な自動駐車装置に関する。
【背景技術】
【0002】
運転者が車両に乗っていない状態で車両が自動的に駐車スペースまで移動して駐車する自動駐車装置、システムが種々提案されている。たとえば、特許文献1に記載のものがそれである。
【0003】
特許文献1のシステムは、ユーザに携帯される遠隔制御装置と、車両に搭載される自動駐車支援装置とからなる。ユーザが遠隔制御装置を操作して、自動駐車指令信号を車両に搭載された自動駐車支援装置に与えると、その自動駐車支援装置は、車両の現在位置から自動駐車指定位置までの距離が自動駐車可能距離(たとえば100m以下)であると判断したことに基づいて無人走行を開始する。無人走行中は、逐次、車両位置を遠隔制御装置に送信する。また、路車間通信や車車間通信によって、自動駐車指定位置までの経路の渋滞情報および駐車スペースの有無情報を取得する。そして、渋滞頻度が所定頻度以上である場合および駐車スペースがない場合には、その旨を遠隔制御装置に送信する。また、車両が自動駐車を正常に終了した場合にも、その旨を遠隔制御装置に送信する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−302187号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、一般的に、駐車位置において他車両や壁などの障害物が自車の側方に近接して存在する場合、側方の障害物に注意を払いながら降車する必要がある。特に、特許文献1では、自動駐車支援システムが適用されている車両はドアを備えていない一人乗りの車両であるが、これとは異なり、ドアを備えている一般的な自動車の場合には、自車両に近接する障害物にドアをぶつけないように注意しつつ降車しなければならない。
【0006】
特許文献1のシステムを利用すると、このような状況において、最終的な駐車位置となる前に、側方の障害物に注意を払う必要が少ない広い場所で車両から降車しておき、その後、無人で車両を走行させて駐車スペースに駐車させることができる。
【0007】
しかしながら、特許文献1のものは、自動駐車指定位置までの経路の渋滞情報および駐車スペースの有無情報を路車間通信や車車間通信によって取得する。そのため、路車間通信や車車間通信を行うための装置を車両に設ける必要があるとともに、路車間通信や車車間通信が利用できるインフラ設備も整備されていなければならず、インフラ設備が整備されていない場所では、無人走行ができないという問題があった。
【0008】
また、引用文献1では、現在位置と自動駐車指定位置との間の経路を自動走行するための舵角計算を行わなければならないことから、計算が複雑であるという問題もあった。
【0009】
本発明は、この事情に基づいて成されたものであり、その目的とするところは、インフラ設備が不要であり、且つ、自動走行中の演算処理負荷も少ない自動駐車装置を提供することにある。
【課題を解決するための手段】
【0010】
その目的を達成するための請求項1記載の発明は、車両に搭載され、その車両を自動的に走行させて駐車させることができる自動駐車装置であって、記憶装置と、前記車両が駐車完了位置に位置したか否かを判断する駐車完了判断手段と、自動駐車開始条件が成立したか否かを判断する自動駐車開始判断手段と、車両の走行軌跡に関する軌跡情報を、前記車両が駐車完了位置に位置したと判断されてから前記自動駐車開始条件が成立したと判断されるまで逐次取得して、前記記憶装置に記憶する軌跡情報取得手段と、前記自動駐車開始条件が成立した場合に、前記記憶装置に記憶されている軌跡情報に基づいて、前記車両が駐車完了位置に位置したと判断されてから前記自動駐車開始条件が成立したと判断されるまでの車両の移動軌跡を逆方向に前記車両を自動走行させて、前記車両を前記駐車完了位置まで移動させる自動走行制御手段とを含むことを特徴とする。
【0011】
本発明の自動駐車装置が搭載された車両を運転する運転者は、駐車位置において他車両や壁などの障害物が自車両の側方に近接して存在する駐車スペースに自車両を駐車させる場合、次のような操作を行うことになる。
【0012】
まず、運転者は、車両を運転して、最終的に駐車させたい位置まで車両を移動させる。そして、この時点で車両が駐車完了位置に位置したことを本発明の自動駐車装置に教えるための所定の操作を行う。これにより、駐車完了判断手段は、車両が駐車完了位置に位置したと判断することになる。
【0013】
次に、運転者は、車両から降りやすい位置まで車両を再度走行させる。このときの軌跡情報は記憶装置に記憶される。その後、運転者は車両から降車する。また、他の乗員が車両に乗っている場合には、他の乗員も降車する。この降車の後、乗員が携帯機から自動駐車開始指示信号を送信させ、この自動駐車開始指示信号を自動駐車装置が受信したり、あるいは、自動駐車装置が乗員の降車を自動的に判断するなどして、自動駐車開始判断手段が自動駐車開始条件が成立したと判断した場合、自動走行制御手段が、記憶装置に記憶されている軌跡情報に基づいて、駐車完了信号を取得した時点から自動駐車開始条件が成立するまでの車両の移動軌跡を逆方向に自動的に走行させて、車両を前記駐車完了信号を取得した位置まで移動させる。
【0014】
このように、本発明によれば、自動走行制御手段は、記憶装置に記憶されている軌跡情報に基づいて駐車完了位置まで自動走行を行うので、インフラ設備が整備されていない場所においても自動駐車を行うことが可能となる。また、自動走行の際の経路は、駐車完了位置から自動駐車開始条件が成立するまでの車両の移動軌跡を逆方向としただけであるので、自動走行中の演算処理負荷も少ない。
【0015】
また、請求項2は、前記車両の周辺の物体を検出する周辺物体検出装置と、前記自動走行制御手段によって前記車両が自動走行している間、前記周辺物体検出装置による前記車両の周辺の物体検出結果に基づいて、前記車両が障害物と衝突する危険の有無を判定する危険判定手段と、を備え、前記自動走行制御手段は、前記危険判定手段によって前記車両が障害物と衝突する危険があると判定されたことに基づいて、前記車両の自動走行を停止することを特徴とする。このようにすれば、自動走行している間に車両が障害物と衝突する危険性を低下させることができる。
【0016】
請求項3は、前記車両が駐車完了位置に位置したと判断された時点から前記自動駐車開始条件が成立したと判断されるまでの運転者の運転操作によって車両が走行させられる手動走行の間、前記周辺物体検出装置による物体検出結果である手動走行時周辺情報を取得して前記記憶装置に記憶する手動走行時周辺情報取得手段をさらに備え、前記危険判定手段は、前記自動走行制御手段によって前記車両が自動走行している間の前記周辺物体検出装置による物体検出結果である自動走行時周辺情報と、前記手動走行時周辺情報との比較に基づいて、前記車両が障害物と衝突する危険の有無を判定する。
【0017】
このように、手動走行時周辺情報と自動走行時周辺情報との比較に基づいて、自動走行中の危険を判定するようにすれば、周囲に存在する駐車車両等の静止している物体を除外して、移動物体のみを判断対象とすることができるので、精度よく危険判定を行うことができる。
【0018】
請求項4は、前記車両の運転者に携帯される携帯機から送信される乗車位置移動信号を受信する車載受信機をさらに備え、前記自動走行制御手段は、前記車載受信機が前記乗車位置移動信号を受信したことに基づいて、前記車両を乗車可能位置まで自動走行させることを特徴とする。
【0019】
このようにすれば、車両を駐車するときのみでなく、駐車位置において障害物が車両の側方に近接して存在する状態の車両への乗車も容易になる。
【0020】
請求項5は、前記車両の運転者に携帯される携帯機から送信される走行停止指示信号を受信する車載受信機をさらに備え、前記自動走行制御手段は、前記車載受信機が前記走行停止指示信号を受信したことに基づいて、前記車両の自動走行を停止することを特徴とする。
【0021】
このようにすれば、車両が自動走行しているときに、運転者が周囲を監視して、車両が障害物と衝突する危険があると判断した場合には、運転者は携帯機を操作することで自動走行を停止させることができる。したがって、自動走行により車両が障害物と衝突する危険性を低下させることができる。
【0022】
上記請求項5のように、運転者が自動走行中の車両を監視することを前提とする場合、請求項6のようにすることが好ましい。
【0023】
その請求項6は、前記自動走行制御手段によって前記車両が自動走行している間、前記車両の運転者が前記車両の周辺に存在しているか否かを逐次判断する運転者存在判断手段をさらに備え、前記自動走行制御手段は、運転者存在判断手段によって運転者が前記車両の周辺に存在していないと判断されたことに基づいて、前記車両の自動走行を停止することを特徴とする。
【0024】
このようにすれば、運転者が車両の周辺に存在していないと判断された場合には、自動走行を停止するので、運転者が監視していない間に、自動走行によって車両が障害物に衝突してしまう可能性を低減できる。
【0025】
なお、運転者の存在は、たとえば、請求項7、8のようにすることができる。請求項7は、前記車両の運転者に携帯される携帯機との間で、その携帯機が前記車両の周辺に存在している場合に通信が可能な車載通信機をさらに備え、前記運転者存在判断手段は、前記車載通信機と前記携帯機との間の通信が可能である場合、前記車両の運転者が前記車両の周辺に存在していると判断し、前記車載通信機と前記携帯機との間の通信が不能である場合、前記車両の運転者が前記車両の周辺に存在していないと判断することを特徴とする。
【0026】
また、請求項8は、前記車両の周辺の画像を撮像する周辺撮像装置をさらに備え、前記運転者存在判断手段は、周辺撮像装置によって撮像された車両周辺の画像を解析して、人が検出できる場合、前記車両の運転者が前記車両の周辺に存在していると判断し、人が検出できない場合、前記車両の運転者が前記車両の周辺に存在していないと判断することを特徴とする。
【図面の簡単な説明】
【0027】
【図1】本発明が適用された自動駐車装置10を含む自動駐車システムの全体構成を示すブロック図である。
【図2】図2は、自動駐車装置10の主制御部100の制御機能を示すブロック図である。
【図3】手動走行時周辺情報と自動走行時周辺情報との差分情報を説明する図である。
【図4】駐車完了判断手段12によって車両が駐車完了位置に位置したと判断される前の状態を示す図である。
【図5】手動操作によって、自車両300が駐車スペース310に駐車した状態を示す図である。
【図6】自車両300を降車しやすい場所まで手動操作で移動させた状態を示す図である。
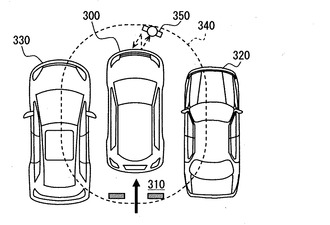
【図7】運転者350が自車両300から降車し、自動駐車開始指示信号を送信させている状態を示す図である。
【図8】自車両300を乗車可能位置まで自動走行させるために、運転者350が乗車位置信号を送信している状態を示す図である。
【図9】自車両300が乗車開始位置へ向けて自動走行を開始している状態を示す図である。
【発明を実施するための形態】
【0028】
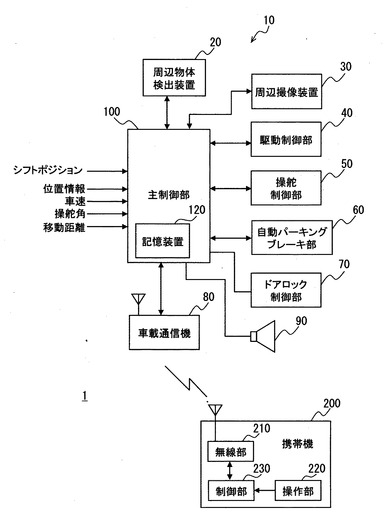
以下、本発明の実施形態を図面に基づいて説明する。図1は、本発明が適用された自動駐車装置10を含む自動駐車システム1の全体構成を示すブロック図である。
【0029】
図1に示すように、自動駐車システム1は、周辺物体検出装置20、周辺撮像装置30、駆動制御部40、操舵制御部50、自動パーキングブレーキ部60、ドアロック制御部70、車載通信機80、スピーカ90、主制御部100、携帯機200を備えている。これらのうち、携帯機200以外は、図示しない車両に搭載されるものであり、携帯機200以外によって自動駐車装置10が構成され、この自動駐車装置10と携帯機200とによって自動駐車システム1が構成される。
【0030】
周辺物体検出装置20は、自動駐車装置10が搭載される車両(以下、単に車両または自車両)の周囲に存在する物体を検出するものである。この周辺物体検出装置20としては、たとえば、ソナーを用いることができる。この周辺物体検出装置20は車両の周囲全体にわたって物体を検出できるようにする。従って、ソナーを用いる場合、そのソナーは、たとえば、車両前端部、車両後端部、車両右側面、車両左側面の4箇所に設ける。なお、ソナーに代えて、車両周辺の画像を撮像するカメラや、レーザセンサを用いることもできる。
【0031】
周辺撮像装置30は、CCDカメラ等のカメラであり、車両周辺の画像を撮像する。この周辺撮像装置30は、周辺撮像装置30が撮像した画像から、車両周辺に車両の運転者が存在するか否かを判断するためのものである。そのため、撮像範囲は、車両からの距離としては、たとえば、車両近傍から、車両から数十m離れた距離までとされ、角度範囲としては、車両を中心としてできるだけ広い角度範囲、好ましくは車両の周囲全部とされる。なお、この周辺撮像装置30を周辺物体検出装置20として用いてもよい。
【0032】
駆動制御部40は、車両の駆動源および制動装置を制御することにより、車両の走行・停止を制御する。より具体的には、車両が駆動力源として内燃機関のみを備えている場合には、エンジンECUおよびブレーキECUが駆動制御部40であり、駆動力源として内燃機関およびモータを備えている場合には、エンジンECUおよびモータECUのいずれか少なくとも一方とおよびブレーキECUが駆動制御部40であり、駆動力源としてモータのみを備えている場合にはモータECUおよびブレーキECUが駆動制御部40である。駆動制御部40は、主制御部100からの指示があった場合には、イグニッションスイッチがオフの状態でも上記駆動力源を駆動できるようになっている。
【0033】
操舵制御部50は、車両の操舵角を制御するものであり、たとえば、電動パワーステアリング装置においてEPSモータを制御するEPS−ECUが操舵制御部50である。
【0034】
自動パーキングブレーキ部60は、自動でパーキングブレーキの起動および解除が可能となっており、機械的ブレーキ機構とその機械的ブレーキ機構を電子的に制御する制御部とからなる。
【0035】
ドアロック制御部70は、車両のドアのロック、アンロックを行う機械的機構(ドアロック機構)を制御するECUである。
【0036】
車載通信機80は、車両周囲の所定範囲(たとえば、数m〜数十m)を通信範囲とし、車両の運転者に携帯される携帯機200との間で無線通信を行う。この無線通信によって送信する信号としてはリクエスト信号があり、また、この無線通信によって受信する信号としては、たとえば、リクエスト信号に応じて携帯機200から送信されるレスポンス信号がある。リクエスト信号は、車両の停止または乗員の降車から一定期間は、所定周期で送信し、また、自動走行中も所定周期で送信する。なお、車両の停止は、たとえば、イグニッションオフにより検出し、乗員の降車は、車両の停止後のドアの開閉や、ドアロックにより検出する。
【0037】
本実施形態のスピーカ90は、車両周囲に存在する者を対象として音を出力するものである。
【0038】
主制御部100は、CPU、ROM、RAM等を備えたコンピュータであり、周辺物体検出装置20、周辺撮像装置30、駆動制御部40、操舵制御部50、自動パーキングブレーキ部60、ドアロック制御部70、車載通信機80、スピーカ90と接続されており、これらから信号を受信するとともに、これらに制御信号等の信号を出力する。また、主制御部100には、シフトポジション、位置情報、車速、操舵角、移動距離をそれぞれ示す信号が供給される。また、主制御部100は、その内部に、書き込み可能な記憶装置120を備えている。なお、記憶装置120が主制御部100の外部に備えられていてもよい。この主制御部100の制御機能は、図2を用いて後に詳述する。
【0039】
携帯機200は、車両の運転者に携帯されるものであり、無線部210、操作部220、制御部230を備えている。無線部210は、車載通信機80との間で信号の送受信を行う送受信機能を備えており、制御部230から送信された信号を車載通信機80に送信し、また、車載通信機80の信号を受信して制御部230に出力する。なお、この無線部210の通信可能距離は数m〜数十m程度となっている。
【0040】
操作部220は、運転者が操作を行う部分であり、たとえば、複数の押しボタンからなる。制御部230は、操作部220に対して所定の操作が行われたことに基づいて、自動駐車の開始を指示する自動駐車開始指示信号、自動走行の停止を指示するを走行停止指示信号を無線部210から送信させる。また、車載通信機80からリクエスト信号を受信したら、レスポンス信号を無線部210から送信させる。
【0041】
なお、この携帯機200の機能は、車両のドアの開閉や、イグニッションのオンオフを運転者がキーを操作することなく行うことができるシステムのキーに組み込まれることが好ましい。
【0042】
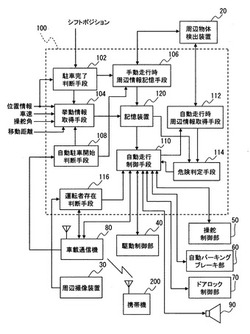
次に、自動駐車装置10の主制御部100の制御機能を図2を用いて説明する。図2は、自動駐車装置10の主制御部100の制御機能を示すブロック図である。主制御部100は、CPUが、RAMの一時記憶機能を利用しつつ、ROMに記憶されたプログラムを実行することで、図2に示す各種の機能(手段)を実現する。
【0043】
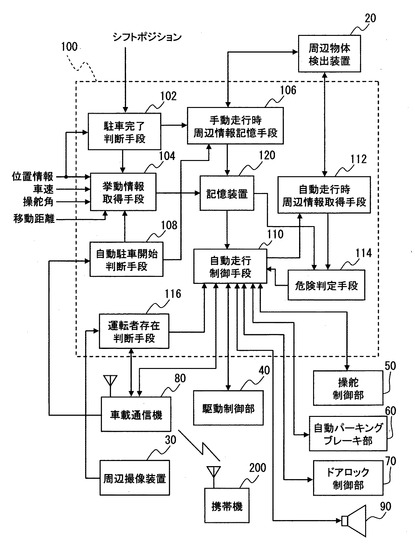
図2に示すように、主制御部100は、駐車完了判断手段102、挙動情報取得手段104、手動走行時周辺情報取得手段106、自動駐車開始判断手段108、自動走行制御手段110、自動走行時周辺情報取得手段112、危険判定手段114、運転者存在判断手段116を備えている。
【0044】
駐車完了判断手段102は、車両が駐車完了位置に位置したか否かを逐次判断する。この判断は、運転者が、所望の駐車完了位置まで車両を手動操作で走行させて停止させたときに(またはその前後に)取得できる信号に基づいて判断する。
【0045】
たとえば、「自動駐車支援ボタン」等を車室内の所定の位置に設けておき、この自動駐車支援ボタンが押されたことを示す信号を取得した場合に、車両が駐車完了位置に位置したと判断する。
【0046】
また、ナビゲーション装置からの信号により、車両が駐車場に位置していると判断でき、且つ、車両が停車したと判断できたときに、車両が駐車完了位置に位置したと判断してもよい。車両が停車したか否かの判断は、たとえば、シフトポジション信号に基づいて行い、パーキング位置を示すシフトポジション信号が取得できたときには、停車したと判断する。また、所定時間(たとえば数秒程度)以上、車速がゼロである場合に、車両が停車したと判断してもよい。また、シフトポジション信号と車速とを組み合わせ、車速が所定時間以上ゼロであり、その後、走行ポジション(Dポジション、Lポジション、Rポジションなど)を示すシフトポジション信号を取得したら、車両が停車していたと判断してもよい。また、パーキングブレーキがオンになったことを示す信号、イグニッションスイッチオフを示す信号を取得した場合に、車両が停車したと判断してもよい。
【0047】
本実施形態の自動駐車装置10を搭載した車両を運転する運転者は、上記駐車完了位置にて降車することもできるが、駐車完了位置において他車両や壁などの障害物が自車両の側方に近接して存在する場合には、降車が容易な位置まで自車両を再度移動させてから降車する。従って、自動駐車装置10は、次の挙動情報取得手段104を備えている。
【0048】
挙動情報取得手段104は、請求項の軌跡情報取得手段に相当するものであり、駐車完了判断手段102により、車両が駐車完了位置に位置したと判断されてから、後述の自動駐車開始判断手段108により自動駐車開始条件が成立したと判断されるまで、挙動情報を逐次取得し、取得した挙動情報を記憶装置120に記憶する。
【0049】
上記挙動情報は、たとえば、位置、車速、操舵角、移動距離をそれぞれ示す情報である。位置情報は、たとえば、緯度、経度で示され、ナビゲーション装置から取得する。車速、操舵角は、それぞれ、車速センサ、操舵角センサから取得する。移動距離は、ナビゲーション装置から取得してもよいし、車速および移動時間から算出してもよい。
【0050】
ただし、挙動情報は手動走行時の走行軌跡を算出できればよく、位置、車速、操舵角、移動距離の全てを必須とするものではない。たとえば、位置情報のみ、あるいは、位置情報と操舵角のみを挙動情報として取得してもよい。逆に、位置情報(緯度、経度)を利用せず、操舵角、車速、移動距離からナビゲーション装置の自律航法と同様の計算により走行軌跡を算出することもできるので、操舵角、車速、移動距離を挙動情報として取得してもよい。また、位置情報(緯度、経度)を、操舵角、車速、移動距離のいずれか少なくとも1つにより補正してもよい。
【0051】
手動走行時周辺情報記憶手段106は、駐車完了判断手段102により、車両が駐車完了位置に位置したと判断された時点から、後述の自動駐車開始判断手段108により自動駐車開始条件が成立したと判断されるまでの運転者の運転操作によって車両が走行させられる手動走行の間、周辺物体検出装置20によって車両周辺に存在する物体の検出を行わせる。そして、その検出結果である手動走行時周辺情報を取得して記憶装置120に記憶する。ここで、物体検出結果は、たとえば、物体の方位および距離で示す。
【0052】
自動駐車開始判断手段108は、駐車完了判断手段102により、車両が駐車完了位置に位置したと判断された後、自動駐車開始条件が成立したか否かを逐次判断する。自動駐車開始条件は、たとえば、携帯機200から送信される自動駐車開始指示信号を受信したことである。また、車両の乗員が降車したことを自動で検出し、且つ、所定時間(たとえば数秒程度)経過したことを自動駐車開始条件としてもよい。
【0053】
自動走行制御手段110は、自動駐車開始判断手段108により自動駐車開始条件が成立したと判断された場合に、まず、自動パーキングブレーキ部60に、パーキングブレーキの解除を指示する信号を出力する。そして、駐車完了判断手段102によって駐車完了位置に位置したと判断されたときの車両の位置、すなわち駐車完了位置まで、車両を無人で自動走行させるための信号を、駆動制御部40、操舵制御部50に送信する。
【0054】
この自動走行の際の走行経路は、記憶装置120に記憶されている挙動情報が示す、駐車完了位置から自動駐車開始条件が成立したと判断されるまで移動軌跡を逆方向に進行する経路である。また、走行速度は、低速度(たとえば3km/h以下)とする。さらに、自動走行中は、車両が移動中であることに対して注意を促すための音を、スピーカ90から出力させる。
【0055】
そして、車両が駐車完了位置まで移動したら自動走行を終了させる。ただし、携帯機200の操作部220を継続して押している(所謂、長押し)間に限り自動走行を行う構成とした場合には、携帯機200の操作部220を押していること示す信号(以下、押下信号)を受信できなくなった場合にも自動走行を停止する。また、携帯機200から走行停止指示指示を受信した場合にも自動走行を停止する。また、後述する危険判定手段114で車両が障害物と衝突する危険があると判定された場合や、後述する運転者存在判断手段116で運転者が車両の周辺にいないと判断された場合にも自動走行を停止する。
【0056】
なお、駐車完了位置まで移動して自動走行を終了したら、自動走行制御手段110は所定の駐車処理を行う。この駐車処理としては、ドアロックがされていない場合にはドアロック制御部70にドアロックを指示する信号を出力し、また、自動パーキングブレーキ部60に自動パーキングブレーキを起動(オン)することを指示する信号を出力する。また、駆動力源が内燃機関の場合には、その内燃機関の停止を指示する信号を駆動制御部40に出力する。
【0057】
自動走行時周辺情報取得手段112は、自動走行制御手段110によって車両が自動走行している間、周辺物体検出装置20によって車両周辺に存在する物体の検出を行わせ、且つ、その検出結果である自動走行時周辺情報を取得する。
【0058】
危険判定手段114は、記憶装置120に記憶されている手動走行時周辺情報と、自動走行時周辺情報取得手段112が取得した自動走行時周辺情報との比較に基づいて、自動走行中、車両が障害物と衝突する危険の有無を判定する。
【0059】
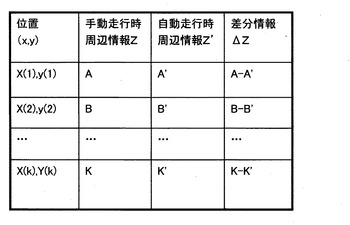
上記手動走行時周辺情報と自動走行時周辺情報との比較は、詳しくは、まず、図3に示すように、同じ位置における両情報の差分情報を算出する。そして、この差分情報が所定の閾値以上である場合に、車両が障害物と衝突する危険があると判定する。
【0060】
このように、手動走行時周辺情報と自動走行時周辺情報との比較に基づいて、車両が障害物と衝突する危険の有無を判定することで、自車両の周囲に存在する駐車車両等の静止している物体を除外して、移動物体のみを判断対象とすることができる。
【0061】
なお、図3には、手動走行時周辺情報および自動走行時周辺情報は、各位置に対して1つを例示しているが、実際には、手動走行時周辺情報および自動走行時周辺情報は、各位置に対して所定の方位毎の複数の情報を有している。
【0062】
運転者存在判断手段116は、自動走行制御手段110によって車両が自動走行している間、運転者が車両の周辺に存在しているか否かを逐次判断する。運転者が車両の周辺に存在しているか否かは、たとえば、車載通信機80が携帯機200と通信ができているか否かにより判断する。また、周辺撮像装置30によって撮像された車両周辺の画像を解析して、人が検出できるか否かにより判断してもよい。なお、周辺撮像装置30を用いる場合、検出した人が運転者以外の者である可能性もあるので、その検出した人が一定位置に留まっているか否かをさらに判断するとよい。車両が自動走行中であれば、運転者は、車両から離れていったり、あるいは、車両の周囲動き回ったりすることはないと考えらることから、検出した人が一定位置に留まっている場合に、運転者が存在すると判断すればよい。
【0063】
前述のように、自動走行制御手段110は、危険判定手段114で車両が障害物と衝突する危険があると判定された場合、および運転者存在判断手段116で運転者が車両の周辺にいないと判断された場合には、自動走行を停止する。
【0064】
また、自動走行制御手段110は、車両が駐車完了位置に駐車しているときに、携帯機200からの乗車位置移動信号を車載通信機80が受信した場合には、駐車完了位置から乗車可能位置まで車両を自動走行させる。ここで乗車可能位置は、前述の自動駐車開始条件が成立したと判断した位置、すなわち、車両から乗員が降車した位置としてもよいし、また、単に、駐車完了位置へ向かって自動走行する時とは反対側の進行方向に所定距離だけ直線移動した位置を乗車可能位置としてもよい。この所定距離は、自車両に隣接して他車両が存在していると仮定して、自車両の運転席ドアを開いたときに、その運転席ドアが他車両にぶつからない距離である。
【0065】
この乗車可能位置まで車両を自動走行させる際にも、携帯機200から走行停止指示信号を受信した場合には自動走行を停止する。また、運転者存在判断手段116で運転者が車両の周辺にいないと判断された場合にも自動走行を停止する。また、乗車可能位置まで車両を自動走行させる際も、走行速度は、低速度(たとえば3km/h以下)とし、自動走行中は、車両が移動中であることに対して注意を促すための音を、スピーカ90から出力させる。
【0066】
そして、乗車可能位置まで自動走行して走行停止し後、または、携帯機200からの停止指示信号により走行停止した後は、駆動制御部40にシフトポジションをパーキングポジションまたはニュートラルポジションにすることを指示する信号を出力し、且つ、ドアロック制御部70にドアロック解除を指示する信号を出力する。
【0067】
図4〜図9は、上述した主制御部100の制御処理によって変化する車両位置を示す図である。次に、この図4〜図9を用いて、主制御部100の制御処理と車両位置の変化との関係を説明する。
【0068】
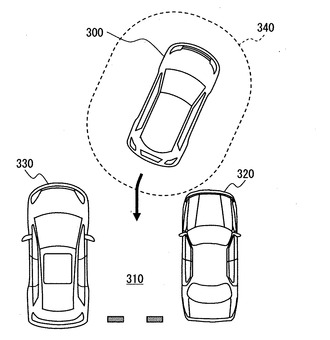
図4は、駐車完了判断手段102によって車両が駐車完了位置に位置したと判断される前の状態を示している。この状態では、まだ、運転者は乗車しており、今から、自車両300を駐車スペース310に手動操作で駐車するところである。この駐車スペース310は、図4に示すように、左右に他車両320、330が駐車している。なお、符号340は周辺物体検出装置20(ソナーなど)の物体検出範囲(周辺監視領域)の一例である。
【0069】
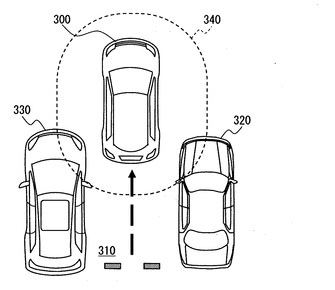
図5は、手動操作によって、自車両300が駐車スペース310に駐車した状態、すなわち、駐車完了位置に自車両300が位置した状態を示している。この状態において、駐車完了判断手段102により、自車両300が駐車完了位置に位置したと判断される。
【0070】
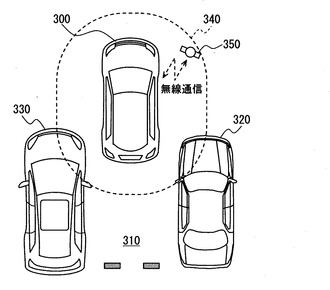
図5に示すように、自車両300と他車両320、330との間は狭く、この位置にて自車両300のドアを開けて降車することは難しい。そこで、運転者は再度、自車両300を運転して、図6に示すように、降車しやすい場所(他車両320、330を気にすることなくドアを開けることができる場所)まで自車両300を移動させる。図5の位置から図6の位置まで自車両300が移動する間は、前述のように、挙動情報、および、手動走行時周辺情報が記憶される。
【0071】
そして、図7に示すように、運転者350が自車両300から降車した後、その運転者350は自車両300の周囲(ここでは自車両300の前方)に位置して、図7においては図示してない携帯機200から、自動駐車開始指示信号を送信させる。
【0072】
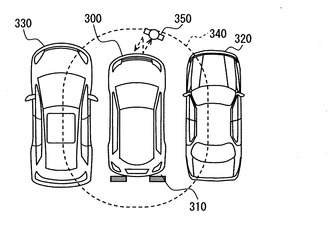
これにより、自車両300は無人で自動走行を開始して、図8に示すように、駐車完了位置まで移動する。なお、図7の位置から図8の位置まで自車両300が移動する間に、障害物と衝突する危険が判定された場合や、運転者350が存在していないと判断された場合には、自動走行が停止される。
【0073】
また、この図8に示す位置に駐車している自車両300に乗車したい場合には、運転者350は、自車両300の周辺において、携帯機200から乗車位置移動信号を送信させる。これにより、図9に示すように、自車両300は、乗車可能位置(図7)へ向けて自動走行を開始する。その自動走行の途中で、運転者は、自車両300が十分に乗車しやすい位置まで移動したと判断した場合には、走行停止指示信号を携帯機200から送信させ、自車両300が乗車可能位置まで移動する前に自車両300を停止させ、その位置で自車両300に乗車することもできる。また、もちろん、図9とは異なり、他車両320が存在しなくなった場合には、駐車完了位置にて自車両300に乗車してもよい。
【0074】
以上、説明した本実施形態によれば、記憶装置120に記憶されている挙動情報に基づいて駐車完了位置まで自動走行を行うので、インフラ設備が整備されていない場所においても自動駐車を行うことが可能となる。
【0075】
また、自動走行の際の経路は、駐車完了位置から自動駐車開始条件が成立するまでの車両の移動軌跡を逆方向としただけであるので、自動走行中の演算処理負荷も少ない。
【0076】
また、本実施形態によれば、自動走行中に、自車両が障害物と衝突する危険があると判定されたときや、携帯機200からの走行停止指示信号を受信したときには、自動走行を停止するので、自動走行している間に車両が障害物と衝突する危険性を低下させることができる。
【0077】
また、運転者が車両の周辺に存在していないと判断したときにも自動走行を停止するので、運転者が監視していない間に、自動走行によって車両が障害物に衝突してしまう可能性を低減できる。
【0078】
以上、本発明の実施形態を説明したが、本発明は上述の実施形態に限定されるものではなく、次の実施形態も本発明の技術的範囲に含まれ、さらに、下記以外にも要旨を逸脱しない範囲内で種々変更して実施することができる。
【0079】
たとえば、図4〜図9は、後進走行により駐車完了位置に自動駐車する例であったが、本発明は、前進走行により駐車完了位置へ自動駐車することも可能である。
【符号の説明】
【0080】
1:自動駐車システム、 10:自動駐車装置、 20:周辺物体検出装置、 30:周辺撮像装置、 40:駆動制御部、 50:操舵制御部、 60:自動パーキングブレーキ部、 70:ドアロック制御部、 80:車載通信機(車載受信機)、 90:スピーカ、 100:主制御部、 102:駐車完了判断手段、 104:挙動情報取得手段(軌跡情報取得手段)、 106:手動走行時周辺情報取得手段、 108:自動駐車開始判断手段、 110:自動走行制御手段、 112:自動走行時周辺情報取得手段、 114:危険判定手段、 116:運転者存在判断手段、 120:記憶装置、 200:携帯機、 210:無線部、 220:操作部、 230:制御部、 300:自車両、 310:駐車スペース、 320:他車両、 330:他車両、 340:物体検出範囲、 350:運転者
【技術分野】
【0001】
本発明は、自動駐車装置に関し、特に、駐車位置において他車両や壁などの障害物が自車両の側方に近接して存在する駐車スペースに自車両を駐車させる場合に好適な自動駐車装置に関する。
【背景技術】
【0002】
運転者が車両に乗っていない状態で車両が自動的に駐車スペースまで移動して駐車する自動駐車装置、システムが種々提案されている。たとえば、特許文献1に記載のものがそれである。
【0003】
特許文献1のシステムは、ユーザに携帯される遠隔制御装置と、車両に搭載される自動駐車支援装置とからなる。ユーザが遠隔制御装置を操作して、自動駐車指令信号を車両に搭載された自動駐車支援装置に与えると、その自動駐車支援装置は、車両の現在位置から自動駐車指定位置までの距離が自動駐車可能距離(たとえば100m以下)であると判断したことに基づいて無人走行を開始する。無人走行中は、逐次、車両位置を遠隔制御装置に送信する。また、路車間通信や車車間通信によって、自動駐車指定位置までの経路の渋滞情報および駐車スペースの有無情報を取得する。そして、渋滞頻度が所定頻度以上である場合および駐車スペースがない場合には、その旨を遠隔制御装置に送信する。また、車両が自動駐車を正常に終了した場合にも、その旨を遠隔制御装置に送信する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−302187号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、一般的に、駐車位置において他車両や壁などの障害物が自車の側方に近接して存在する場合、側方の障害物に注意を払いながら降車する必要がある。特に、特許文献1では、自動駐車支援システムが適用されている車両はドアを備えていない一人乗りの車両であるが、これとは異なり、ドアを備えている一般的な自動車の場合には、自車両に近接する障害物にドアをぶつけないように注意しつつ降車しなければならない。
【0006】
特許文献1のシステムを利用すると、このような状況において、最終的な駐車位置となる前に、側方の障害物に注意を払う必要が少ない広い場所で車両から降車しておき、その後、無人で車両を走行させて駐車スペースに駐車させることができる。
【0007】
しかしながら、特許文献1のものは、自動駐車指定位置までの経路の渋滞情報および駐車スペースの有無情報を路車間通信や車車間通信によって取得する。そのため、路車間通信や車車間通信を行うための装置を車両に設ける必要があるとともに、路車間通信や車車間通信が利用できるインフラ設備も整備されていなければならず、インフラ設備が整備されていない場所では、無人走行ができないという問題があった。
【0008】
また、引用文献1では、現在位置と自動駐車指定位置との間の経路を自動走行するための舵角計算を行わなければならないことから、計算が複雑であるという問題もあった。
【0009】
本発明は、この事情に基づいて成されたものであり、その目的とするところは、インフラ設備が不要であり、且つ、自動走行中の演算処理負荷も少ない自動駐車装置を提供することにある。
【課題を解決するための手段】
【0010】
その目的を達成するための請求項1記載の発明は、車両に搭載され、その車両を自動的に走行させて駐車させることができる自動駐車装置であって、記憶装置と、前記車両が駐車完了位置に位置したか否かを判断する駐車完了判断手段と、自動駐車開始条件が成立したか否かを判断する自動駐車開始判断手段と、車両の走行軌跡に関する軌跡情報を、前記車両が駐車完了位置に位置したと判断されてから前記自動駐車開始条件が成立したと判断されるまで逐次取得して、前記記憶装置に記憶する軌跡情報取得手段と、前記自動駐車開始条件が成立した場合に、前記記憶装置に記憶されている軌跡情報に基づいて、前記車両が駐車完了位置に位置したと判断されてから前記自動駐車開始条件が成立したと判断されるまでの車両の移動軌跡を逆方向に前記車両を自動走行させて、前記車両を前記駐車完了位置まで移動させる自動走行制御手段とを含むことを特徴とする。
【0011】
本発明の自動駐車装置が搭載された車両を運転する運転者は、駐車位置において他車両や壁などの障害物が自車両の側方に近接して存在する駐車スペースに自車両を駐車させる場合、次のような操作を行うことになる。
【0012】
まず、運転者は、車両を運転して、最終的に駐車させたい位置まで車両を移動させる。そして、この時点で車両が駐車完了位置に位置したことを本発明の自動駐車装置に教えるための所定の操作を行う。これにより、駐車完了判断手段は、車両が駐車完了位置に位置したと判断することになる。
【0013】
次に、運転者は、車両から降りやすい位置まで車両を再度走行させる。このときの軌跡情報は記憶装置に記憶される。その後、運転者は車両から降車する。また、他の乗員が車両に乗っている場合には、他の乗員も降車する。この降車の後、乗員が携帯機から自動駐車開始指示信号を送信させ、この自動駐車開始指示信号を自動駐車装置が受信したり、あるいは、自動駐車装置が乗員の降車を自動的に判断するなどして、自動駐車開始判断手段が自動駐車開始条件が成立したと判断した場合、自動走行制御手段が、記憶装置に記憶されている軌跡情報に基づいて、駐車完了信号を取得した時点から自動駐車開始条件が成立するまでの車両の移動軌跡を逆方向に自動的に走行させて、車両を前記駐車完了信号を取得した位置まで移動させる。
【0014】
このように、本発明によれば、自動走行制御手段は、記憶装置に記憶されている軌跡情報に基づいて駐車完了位置まで自動走行を行うので、インフラ設備が整備されていない場所においても自動駐車を行うことが可能となる。また、自動走行の際の経路は、駐車完了位置から自動駐車開始条件が成立するまでの車両の移動軌跡を逆方向としただけであるので、自動走行中の演算処理負荷も少ない。
【0015】
また、請求項2は、前記車両の周辺の物体を検出する周辺物体検出装置と、前記自動走行制御手段によって前記車両が自動走行している間、前記周辺物体検出装置による前記車両の周辺の物体検出結果に基づいて、前記車両が障害物と衝突する危険の有無を判定する危険判定手段と、を備え、前記自動走行制御手段は、前記危険判定手段によって前記車両が障害物と衝突する危険があると判定されたことに基づいて、前記車両の自動走行を停止することを特徴とする。このようにすれば、自動走行している間に車両が障害物と衝突する危険性を低下させることができる。
【0016】
請求項3は、前記車両が駐車完了位置に位置したと判断された時点から前記自動駐車開始条件が成立したと判断されるまでの運転者の運転操作によって車両が走行させられる手動走行の間、前記周辺物体検出装置による物体検出結果である手動走行時周辺情報を取得して前記記憶装置に記憶する手動走行時周辺情報取得手段をさらに備え、前記危険判定手段は、前記自動走行制御手段によって前記車両が自動走行している間の前記周辺物体検出装置による物体検出結果である自動走行時周辺情報と、前記手動走行時周辺情報との比較に基づいて、前記車両が障害物と衝突する危険の有無を判定する。
【0017】
このように、手動走行時周辺情報と自動走行時周辺情報との比較に基づいて、自動走行中の危険を判定するようにすれば、周囲に存在する駐車車両等の静止している物体を除外して、移動物体のみを判断対象とすることができるので、精度よく危険判定を行うことができる。
【0018】
請求項4は、前記車両の運転者に携帯される携帯機から送信される乗車位置移動信号を受信する車載受信機をさらに備え、前記自動走行制御手段は、前記車載受信機が前記乗車位置移動信号を受信したことに基づいて、前記車両を乗車可能位置まで自動走行させることを特徴とする。
【0019】
このようにすれば、車両を駐車するときのみでなく、駐車位置において障害物が車両の側方に近接して存在する状態の車両への乗車も容易になる。
【0020】
請求項5は、前記車両の運転者に携帯される携帯機から送信される走行停止指示信号を受信する車載受信機をさらに備え、前記自動走行制御手段は、前記車載受信機が前記走行停止指示信号を受信したことに基づいて、前記車両の自動走行を停止することを特徴とする。
【0021】
このようにすれば、車両が自動走行しているときに、運転者が周囲を監視して、車両が障害物と衝突する危険があると判断した場合には、運転者は携帯機を操作することで自動走行を停止させることができる。したがって、自動走行により車両が障害物と衝突する危険性を低下させることができる。
【0022】
上記請求項5のように、運転者が自動走行中の車両を監視することを前提とする場合、請求項6のようにすることが好ましい。
【0023】
その請求項6は、前記自動走行制御手段によって前記車両が自動走行している間、前記車両の運転者が前記車両の周辺に存在しているか否かを逐次判断する運転者存在判断手段をさらに備え、前記自動走行制御手段は、運転者存在判断手段によって運転者が前記車両の周辺に存在していないと判断されたことに基づいて、前記車両の自動走行を停止することを特徴とする。
【0024】
このようにすれば、運転者が車両の周辺に存在していないと判断された場合には、自動走行を停止するので、運転者が監視していない間に、自動走行によって車両が障害物に衝突してしまう可能性を低減できる。
【0025】
なお、運転者の存在は、たとえば、請求項7、8のようにすることができる。請求項7は、前記車両の運転者に携帯される携帯機との間で、その携帯機が前記車両の周辺に存在している場合に通信が可能な車載通信機をさらに備え、前記運転者存在判断手段は、前記車載通信機と前記携帯機との間の通信が可能である場合、前記車両の運転者が前記車両の周辺に存在していると判断し、前記車載通信機と前記携帯機との間の通信が不能である場合、前記車両の運転者が前記車両の周辺に存在していないと判断することを特徴とする。
【0026】
また、請求項8は、前記車両の周辺の画像を撮像する周辺撮像装置をさらに備え、前記運転者存在判断手段は、周辺撮像装置によって撮像された車両周辺の画像を解析して、人が検出できる場合、前記車両の運転者が前記車両の周辺に存在していると判断し、人が検出できない場合、前記車両の運転者が前記車両の周辺に存在していないと判断することを特徴とする。
【図面の簡単な説明】
【0027】
【図1】本発明が適用された自動駐車装置10を含む自動駐車システムの全体構成を示すブロック図である。
【図2】図2は、自動駐車装置10の主制御部100の制御機能を示すブロック図である。
【図3】手動走行時周辺情報と自動走行時周辺情報との差分情報を説明する図である。
【図4】駐車完了判断手段12によって車両が駐車完了位置に位置したと判断される前の状態を示す図である。
【図5】手動操作によって、自車両300が駐車スペース310に駐車した状態を示す図である。
【図6】自車両300を降車しやすい場所まで手動操作で移動させた状態を示す図である。
【図7】運転者350が自車両300から降車し、自動駐車開始指示信号を送信させている状態を示す図である。
【図8】自車両300を乗車可能位置まで自動走行させるために、運転者350が乗車位置信号を送信している状態を示す図である。
【図9】自車両300が乗車開始位置へ向けて自動走行を開始している状態を示す図である。
【発明を実施するための形態】
【0028】
以下、本発明の実施形態を図面に基づいて説明する。図1は、本発明が適用された自動駐車装置10を含む自動駐車システム1の全体構成を示すブロック図である。
【0029】
図1に示すように、自動駐車システム1は、周辺物体検出装置20、周辺撮像装置30、駆動制御部40、操舵制御部50、自動パーキングブレーキ部60、ドアロック制御部70、車載通信機80、スピーカ90、主制御部100、携帯機200を備えている。これらのうち、携帯機200以外は、図示しない車両に搭載されるものであり、携帯機200以外によって自動駐車装置10が構成され、この自動駐車装置10と携帯機200とによって自動駐車システム1が構成される。
【0030】
周辺物体検出装置20は、自動駐車装置10が搭載される車両(以下、単に車両または自車両)の周囲に存在する物体を検出するものである。この周辺物体検出装置20としては、たとえば、ソナーを用いることができる。この周辺物体検出装置20は車両の周囲全体にわたって物体を検出できるようにする。従って、ソナーを用いる場合、そのソナーは、たとえば、車両前端部、車両後端部、車両右側面、車両左側面の4箇所に設ける。なお、ソナーに代えて、車両周辺の画像を撮像するカメラや、レーザセンサを用いることもできる。
【0031】
周辺撮像装置30は、CCDカメラ等のカメラであり、車両周辺の画像を撮像する。この周辺撮像装置30は、周辺撮像装置30が撮像した画像から、車両周辺に車両の運転者が存在するか否かを判断するためのものである。そのため、撮像範囲は、車両からの距離としては、たとえば、車両近傍から、車両から数十m離れた距離までとされ、角度範囲としては、車両を中心としてできるだけ広い角度範囲、好ましくは車両の周囲全部とされる。なお、この周辺撮像装置30を周辺物体検出装置20として用いてもよい。
【0032】
駆動制御部40は、車両の駆動源および制動装置を制御することにより、車両の走行・停止を制御する。より具体的には、車両が駆動力源として内燃機関のみを備えている場合には、エンジンECUおよびブレーキECUが駆動制御部40であり、駆動力源として内燃機関およびモータを備えている場合には、エンジンECUおよびモータECUのいずれか少なくとも一方とおよびブレーキECUが駆動制御部40であり、駆動力源としてモータのみを備えている場合にはモータECUおよびブレーキECUが駆動制御部40である。駆動制御部40は、主制御部100からの指示があった場合には、イグニッションスイッチがオフの状態でも上記駆動力源を駆動できるようになっている。
【0033】
操舵制御部50は、車両の操舵角を制御するものであり、たとえば、電動パワーステアリング装置においてEPSモータを制御するEPS−ECUが操舵制御部50である。
【0034】
自動パーキングブレーキ部60は、自動でパーキングブレーキの起動および解除が可能となっており、機械的ブレーキ機構とその機械的ブレーキ機構を電子的に制御する制御部とからなる。
【0035】
ドアロック制御部70は、車両のドアのロック、アンロックを行う機械的機構(ドアロック機構)を制御するECUである。
【0036】
車載通信機80は、車両周囲の所定範囲(たとえば、数m〜数十m)を通信範囲とし、車両の運転者に携帯される携帯機200との間で無線通信を行う。この無線通信によって送信する信号としてはリクエスト信号があり、また、この無線通信によって受信する信号としては、たとえば、リクエスト信号に応じて携帯機200から送信されるレスポンス信号がある。リクエスト信号は、車両の停止または乗員の降車から一定期間は、所定周期で送信し、また、自動走行中も所定周期で送信する。なお、車両の停止は、たとえば、イグニッションオフにより検出し、乗員の降車は、車両の停止後のドアの開閉や、ドアロックにより検出する。
【0037】
本実施形態のスピーカ90は、車両周囲に存在する者を対象として音を出力するものである。
【0038】
主制御部100は、CPU、ROM、RAM等を備えたコンピュータであり、周辺物体検出装置20、周辺撮像装置30、駆動制御部40、操舵制御部50、自動パーキングブレーキ部60、ドアロック制御部70、車載通信機80、スピーカ90と接続されており、これらから信号を受信するとともに、これらに制御信号等の信号を出力する。また、主制御部100には、シフトポジション、位置情報、車速、操舵角、移動距離をそれぞれ示す信号が供給される。また、主制御部100は、その内部に、書き込み可能な記憶装置120を備えている。なお、記憶装置120が主制御部100の外部に備えられていてもよい。この主制御部100の制御機能は、図2を用いて後に詳述する。
【0039】
携帯機200は、車両の運転者に携帯されるものであり、無線部210、操作部220、制御部230を備えている。無線部210は、車載通信機80との間で信号の送受信を行う送受信機能を備えており、制御部230から送信された信号を車載通信機80に送信し、また、車載通信機80の信号を受信して制御部230に出力する。なお、この無線部210の通信可能距離は数m〜数十m程度となっている。
【0040】
操作部220は、運転者が操作を行う部分であり、たとえば、複数の押しボタンからなる。制御部230は、操作部220に対して所定の操作が行われたことに基づいて、自動駐車の開始を指示する自動駐車開始指示信号、自動走行の停止を指示するを走行停止指示信号を無線部210から送信させる。また、車載通信機80からリクエスト信号を受信したら、レスポンス信号を無線部210から送信させる。
【0041】
なお、この携帯機200の機能は、車両のドアの開閉や、イグニッションのオンオフを運転者がキーを操作することなく行うことができるシステムのキーに組み込まれることが好ましい。
【0042】
次に、自動駐車装置10の主制御部100の制御機能を図2を用いて説明する。図2は、自動駐車装置10の主制御部100の制御機能を示すブロック図である。主制御部100は、CPUが、RAMの一時記憶機能を利用しつつ、ROMに記憶されたプログラムを実行することで、図2に示す各種の機能(手段)を実現する。
【0043】
図2に示すように、主制御部100は、駐車完了判断手段102、挙動情報取得手段104、手動走行時周辺情報取得手段106、自動駐車開始判断手段108、自動走行制御手段110、自動走行時周辺情報取得手段112、危険判定手段114、運転者存在判断手段116を備えている。
【0044】
駐車完了判断手段102は、車両が駐車完了位置に位置したか否かを逐次判断する。この判断は、運転者が、所望の駐車完了位置まで車両を手動操作で走行させて停止させたときに(またはその前後に)取得できる信号に基づいて判断する。
【0045】
たとえば、「自動駐車支援ボタン」等を車室内の所定の位置に設けておき、この自動駐車支援ボタンが押されたことを示す信号を取得した場合に、車両が駐車完了位置に位置したと判断する。
【0046】
また、ナビゲーション装置からの信号により、車両が駐車場に位置していると判断でき、且つ、車両が停車したと判断できたときに、車両が駐車完了位置に位置したと判断してもよい。車両が停車したか否かの判断は、たとえば、シフトポジション信号に基づいて行い、パーキング位置を示すシフトポジション信号が取得できたときには、停車したと判断する。また、所定時間(たとえば数秒程度)以上、車速がゼロである場合に、車両が停車したと判断してもよい。また、シフトポジション信号と車速とを組み合わせ、車速が所定時間以上ゼロであり、その後、走行ポジション(Dポジション、Lポジション、Rポジションなど)を示すシフトポジション信号を取得したら、車両が停車していたと判断してもよい。また、パーキングブレーキがオンになったことを示す信号、イグニッションスイッチオフを示す信号を取得した場合に、車両が停車したと判断してもよい。
【0047】
本実施形態の自動駐車装置10を搭載した車両を運転する運転者は、上記駐車完了位置にて降車することもできるが、駐車完了位置において他車両や壁などの障害物が自車両の側方に近接して存在する場合には、降車が容易な位置まで自車両を再度移動させてから降車する。従って、自動駐車装置10は、次の挙動情報取得手段104を備えている。
【0048】
挙動情報取得手段104は、請求項の軌跡情報取得手段に相当するものであり、駐車完了判断手段102により、車両が駐車完了位置に位置したと判断されてから、後述の自動駐車開始判断手段108により自動駐車開始条件が成立したと判断されるまで、挙動情報を逐次取得し、取得した挙動情報を記憶装置120に記憶する。
【0049】
上記挙動情報は、たとえば、位置、車速、操舵角、移動距離をそれぞれ示す情報である。位置情報は、たとえば、緯度、経度で示され、ナビゲーション装置から取得する。車速、操舵角は、それぞれ、車速センサ、操舵角センサから取得する。移動距離は、ナビゲーション装置から取得してもよいし、車速および移動時間から算出してもよい。
【0050】
ただし、挙動情報は手動走行時の走行軌跡を算出できればよく、位置、車速、操舵角、移動距離の全てを必須とするものではない。たとえば、位置情報のみ、あるいは、位置情報と操舵角のみを挙動情報として取得してもよい。逆に、位置情報(緯度、経度)を利用せず、操舵角、車速、移動距離からナビゲーション装置の自律航法と同様の計算により走行軌跡を算出することもできるので、操舵角、車速、移動距離を挙動情報として取得してもよい。また、位置情報(緯度、経度)を、操舵角、車速、移動距離のいずれか少なくとも1つにより補正してもよい。
【0051】
手動走行時周辺情報記憶手段106は、駐車完了判断手段102により、車両が駐車完了位置に位置したと判断された時点から、後述の自動駐車開始判断手段108により自動駐車開始条件が成立したと判断されるまでの運転者の運転操作によって車両が走行させられる手動走行の間、周辺物体検出装置20によって車両周辺に存在する物体の検出を行わせる。そして、その検出結果である手動走行時周辺情報を取得して記憶装置120に記憶する。ここで、物体検出結果は、たとえば、物体の方位および距離で示す。
【0052】
自動駐車開始判断手段108は、駐車完了判断手段102により、車両が駐車完了位置に位置したと判断された後、自動駐車開始条件が成立したか否かを逐次判断する。自動駐車開始条件は、たとえば、携帯機200から送信される自動駐車開始指示信号を受信したことである。また、車両の乗員が降車したことを自動で検出し、且つ、所定時間(たとえば数秒程度)経過したことを自動駐車開始条件としてもよい。
【0053】
自動走行制御手段110は、自動駐車開始判断手段108により自動駐車開始条件が成立したと判断された場合に、まず、自動パーキングブレーキ部60に、パーキングブレーキの解除を指示する信号を出力する。そして、駐車完了判断手段102によって駐車完了位置に位置したと判断されたときの車両の位置、すなわち駐車完了位置まで、車両を無人で自動走行させるための信号を、駆動制御部40、操舵制御部50に送信する。
【0054】
この自動走行の際の走行経路は、記憶装置120に記憶されている挙動情報が示す、駐車完了位置から自動駐車開始条件が成立したと判断されるまで移動軌跡を逆方向に進行する経路である。また、走行速度は、低速度(たとえば3km/h以下)とする。さらに、自動走行中は、車両が移動中であることに対して注意を促すための音を、スピーカ90から出力させる。
【0055】
そして、車両が駐車完了位置まで移動したら自動走行を終了させる。ただし、携帯機200の操作部220を継続して押している(所謂、長押し)間に限り自動走行を行う構成とした場合には、携帯機200の操作部220を押していること示す信号(以下、押下信号)を受信できなくなった場合にも自動走行を停止する。また、携帯機200から走行停止指示指示を受信した場合にも自動走行を停止する。また、後述する危険判定手段114で車両が障害物と衝突する危険があると判定された場合や、後述する運転者存在判断手段116で運転者が車両の周辺にいないと判断された場合にも自動走行を停止する。
【0056】
なお、駐車完了位置まで移動して自動走行を終了したら、自動走行制御手段110は所定の駐車処理を行う。この駐車処理としては、ドアロックがされていない場合にはドアロック制御部70にドアロックを指示する信号を出力し、また、自動パーキングブレーキ部60に自動パーキングブレーキを起動(オン)することを指示する信号を出力する。また、駆動力源が内燃機関の場合には、その内燃機関の停止を指示する信号を駆動制御部40に出力する。
【0057】
自動走行時周辺情報取得手段112は、自動走行制御手段110によって車両が自動走行している間、周辺物体検出装置20によって車両周辺に存在する物体の検出を行わせ、且つ、その検出結果である自動走行時周辺情報を取得する。
【0058】
危険判定手段114は、記憶装置120に記憶されている手動走行時周辺情報と、自動走行時周辺情報取得手段112が取得した自動走行時周辺情報との比較に基づいて、自動走行中、車両が障害物と衝突する危険の有無を判定する。
【0059】
上記手動走行時周辺情報と自動走行時周辺情報との比較は、詳しくは、まず、図3に示すように、同じ位置における両情報の差分情報を算出する。そして、この差分情報が所定の閾値以上である場合に、車両が障害物と衝突する危険があると判定する。
【0060】
このように、手動走行時周辺情報と自動走行時周辺情報との比較に基づいて、車両が障害物と衝突する危険の有無を判定することで、自車両の周囲に存在する駐車車両等の静止している物体を除外して、移動物体のみを判断対象とすることができる。
【0061】
なお、図3には、手動走行時周辺情報および自動走行時周辺情報は、各位置に対して1つを例示しているが、実際には、手動走行時周辺情報および自動走行時周辺情報は、各位置に対して所定の方位毎の複数の情報を有している。
【0062】
運転者存在判断手段116は、自動走行制御手段110によって車両が自動走行している間、運転者が車両の周辺に存在しているか否かを逐次判断する。運転者が車両の周辺に存在しているか否かは、たとえば、車載通信機80が携帯機200と通信ができているか否かにより判断する。また、周辺撮像装置30によって撮像された車両周辺の画像を解析して、人が検出できるか否かにより判断してもよい。なお、周辺撮像装置30を用いる場合、検出した人が運転者以外の者である可能性もあるので、その検出した人が一定位置に留まっているか否かをさらに判断するとよい。車両が自動走行中であれば、運転者は、車両から離れていったり、あるいは、車両の周囲動き回ったりすることはないと考えらることから、検出した人が一定位置に留まっている場合に、運転者が存在すると判断すればよい。
【0063】
前述のように、自動走行制御手段110は、危険判定手段114で車両が障害物と衝突する危険があると判定された場合、および運転者存在判断手段116で運転者が車両の周辺にいないと判断された場合には、自動走行を停止する。
【0064】
また、自動走行制御手段110は、車両が駐車完了位置に駐車しているときに、携帯機200からの乗車位置移動信号を車載通信機80が受信した場合には、駐車完了位置から乗車可能位置まで車両を自動走行させる。ここで乗車可能位置は、前述の自動駐車開始条件が成立したと判断した位置、すなわち、車両から乗員が降車した位置としてもよいし、また、単に、駐車完了位置へ向かって自動走行する時とは反対側の進行方向に所定距離だけ直線移動した位置を乗車可能位置としてもよい。この所定距離は、自車両に隣接して他車両が存在していると仮定して、自車両の運転席ドアを開いたときに、その運転席ドアが他車両にぶつからない距離である。
【0065】
この乗車可能位置まで車両を自動走行させる際にも、携帯機200から走行停止指示信号を受信した場合には自動走行を停止する。また、運転者存在判断手段116で運転者が車両の周辺にいないと判断された場合にも自動走行を停止する。また、乗車可能位置まで車両を自動走行させる際も、走行速度は、低速度(たとえば3km/h以下)とし、自動走行中は、車両が移動中であることに対して注意を促すための音を、スピーカ90から出力させる。
【0066】
そして、乗車可能位置まで自動走行して走行停止し後、または、携帯機200からの停止指示信号により走行停止した後は、駆動制御部40にシフトポジションをパーキングポジションまたはニュートラルポジションにすることを指示する信号を出力し、且つ、ドアロック制御部70にドアロック解除を指示する信号を出力する。
【0067】
図4〜図9は、上述した主制御部100の制御処理によって変化する車両位置を示す図である。次に、この図4〜図9を用いて、主制御部100の制御処理と車両位置の変化との関係を説明する。
【0068】
図4は、駐車完了判断手段102によって車両が駐車完了位置に位置したと判断される前の状態を示している。この状態では、まだ、運転者は乗車しており、今から、自車両300を駐車スペース310に手動操作で駐車するところである。この駐車スペース310は、図4に示すように、左右に他車両320、330が駐車している。なお、符号340は周辺物体検出装置20(ソナーなど)の物体検出範囲(周辺監視領域)の一例である。
【0069】
図5は、手動操作によって、自車両300が駐車スペース310に駐車した状態、すなわち、駐車完了位置に自車両300が位置した状態を示している。この状態において、駐車完了判断手段102により、自車両300が駐車完了位置に位置したと判断される。
【0070】
図5に示すように、自車両300と他車両320、330との間は狭く、この位置にて自車両300のドアを開けて降車することは難しい。そこで、運転者は再度、自車両300を運転して、図6に示すように、降車しやすい場所(他車両320、330を気にすることなくドアを開けることができる場所)まで自車両300を移動させる。図5の位置から図6の位置まで自車両300が移動する間は、前述のように、挙動情報、および、手動走行時周辺情報が記憶される。
【0071】
そして、図7に示すように、運転者350が自車両300から降車した後、その運転者350は自車両300の周囲(ここでは自車両300の前方)に位置して、図7においては図示してない携帯機200から、自動駐車開始指示信号を送信させる。
【0072】
これにより、自車両300は無人で自動走行を開始して、図8に示すように、駐車完了位置まで移動する。なお、図7の位置から図8の位置まで自車両300が移動する間に、障害物と衝突する危険が判定された場合や、運転者350が存在していないと判断された場合には、自動走行が停止される。
【0073】
また、この図8に示す位置に駐車している自車両300に乗車したい場合には、運転者350は、自車両300の周辺において、携帯機200から乗車位置移動信号を送信させる。これにより、図9に示すように、自車両300は、乗車可能位置(図7)へ向けて自動走行を開始する。その自動走行の途中で、運転者は、自車両300が十分に乗車しやすい位置まで移動したと判断した場合には、走行停止指示信号を携帯機200から送信させ、自車両300が乗車可能位置まで移動する前に自車両300を停止させ、その位置で自車両300に乗車することもできる。また、もちろん、図9とは異なり、他車両320が存在しなくなった場合には、駐車完了位置にて自車両300に乗車してもよい。
【0074】
以上、説明した本実施形態によれば、記憶装置120に記憶されている挙動情報に基づいて駐車完了位置まで自動走行を行うので、インフラ設備が整備されていない場所においても自動駐車を行うことが可能となる。
【0075】
また、自動走行の際の経路は、駐車完了位置から自動駐車開始条件が成立するまでの車両の移動軌跡を逆方向としただけであるので、自動走行中の演算処理負荷も少ない。
【0076】
また、本実施形態によれば、自動走行中に、自車両が障害物と衝突する危険があると判定されたときや、携帯機200からの走行停止指示信号を受信したときには、自動走行を停止するので、自動走行している間に車両が障害物と衝突する危険性を低下させることができる。
【0077】
また、運転者が車両の周辺に存在していないと判断したときにも自動走行を停止するので、運転者が監視していない間に、自動走行によって車両が障害物に衝突してしまう可能性を低減できる。
【0078】
以上、本発明の実施形態を説明したが、本発明は上述の実施形態に限定されるものではなく、次の実施形態も本発明の技術的範囲に含まれ、さらに、下記以外にも要旨を逸脱しない範囲内で種々変更して実施することができる。
【0079】
たとえば、図4〜図9は、後進走行により駐車完了位置に自動駐車する例であったが、本発明は、前進走行により駐車完了位置へ自動駐車することも可能である。
【符号の説明】
【0080】
1:自動駐車システム、 10:自動駐車装置、 20:周辺物体検出装置、 30:周辺撮像装置、 40:駆動制御部、 50:操舵制御部、 60:自動パーキングブレーキ部、 70:ドアロック制御部、 80:車載通信機(車載受信機)、 90:スピーカ、 100:主制御部、 102:駐車完了判断手段、 104:挙動情報取得手段(軌跡情報取得手段)、 106:手動走行時周辺情報取得手段、 108:自動駐車開始判断手段、 110:自動走行制御手段、 112:自動走行時周辺情報取得手段、 114:危険判定手段、 116:運転者存在判断手段、 120:記憶装置、 200:携帯機、 210:無線部、 220:操作部、 230:制御部、 300:自車両、 310:駐車スペース、 320:他車両、 330:他車両、 340:物体検出範囲、 350:運転者
【特許請求の範囲】
【請求項1】
車両に搭載され、その車両を自動的に走行させて駐車させることができる自動駐車装置であって、
記憶装置と、
前記車両が駐車完了位置に位置したか否かを判断する駐車完了判断手段と、
自動駐車開始条件が成立したか否かを判断する自動駐車開始判断手段と、
車両の走行軌跡に関する軌跡情報を、前記車両が駐車完了位置に位置したと判断されてから前記自動駐車開始条件が成立したと判断されるまで逐次取得して、前記記憶装置に記憶する軌跡情報取得手段と、
前記自動駐車開始条件が成立した場合に、前記記憶装置に記憶されている軌跡情報に基づいて、前記車両が駐車完了位置に位置したと判断されてから前記自動駐車開始条件が成立したと判断されるまでの車両の移動軌跡を逆方向に前記車両を自動走行させて、前記車両を前記駐車完了位置まで移動させる自動走行制御手段と
を含むことを特徴とする自動駐車装置。
【請求項2】
請求項1において、
前記車両の周辺の物体を検出する周辺物体検出装置と、
前記自動走行制御手段によって前記車両が自動走行している間、前記周辺物体検出装置による前記車両の周辺の物体検出結果に基づいて、前記車両が障害物と衝突する危険の有無を判定する危険判定手段と、を備え、
前記自動走行制御手段は、前記危険判定手段によって前記車両が障害物と衝突する危険があると判定されたことに基づいて、前記車両の自動走行を停止することを特徴とする自動駐車装置。
【請求項3】
請求項2において、
前記車両が駐車完了位置に位置したと判断された時点から前記自動駐車開始条件が成立したと判断されるまでの運転者の運転操作によって車両が走行させられる手動走行の間、前記周辺物体検出装置による物体検出結果である手動走行時周辺情報を取得して前記記憶装置に記憶する手動走行時周辺情報取得手段をさらに備え、
前記危険判定手段は、前記自動走行制御手段によって前記車両が自動走行している間の前記周辺物体検出装置による物体検出結果である自動走行時周辺情報と、前記手動走行時周辺情報との比較に基づいて、前記車両が障害物と衝突する危険の有無を判定することを特徴とする自動駐車装置。
【請求項4】
請求項1において、
前記車両の運転者に携帯される携帯機から送信される乗車位置移動信号を受信する車載受信機をさらに備え、
前記自動走行制御手段は、前記車載受信機が前記乗車位置移動信号を受信したことに基づいて、前記車両を乗車可能位置まで自動走行させることを特徴とする自動駐車装置。
【請求項5】
請求項1〜4のいずれか1項において、
前記車両の運転者に携帯される携帯機から送信される走行停止指示信号を受信する車載受信機をさらに備え、
前記自動走行制御手段は、前記車載受信機が前記走行停止指示信号を受信したことに基づいて、前記車両の自動走行を停止することを特徴とする自動駐車装置。
【請求項6】
請求項5において、
前記自動走行制御手段によって前記車両が自動走行している間、前記車両の運転者が前記車両の周辺に存在しているか否かを逐次判断する運転者存在判断手段をさらに備え、
前記自動走行制御手段は、運転者存在判断手段によって運転者が前記車両の周辺に存在していないと判断されたことに基づいて、前記車両の自動走行を停止することを特徴とする自動駐車装置。
【請求項7】
請求項6において、
前記車両の運転者に携帯される携帯機との間で、その携帯機が前記車両の周辺に存在している場合に通信が可能な車載通信機をさらに備え、
前記運転者存在判断手段は、前記車載通信機と前記携帯機との間の通信が可能である場合、前記車両の運転者が前記車両の周辺に存在していると判断し、前記車載通信機と前記携帯機との間の通信が不能である場合、前記車両の運転者が前記車両の周辺に存在していないと判断することを特徴とする自動駐車装置。
【請求項8】
請求項6において、
前記車両の周辺の画像を撮像する周辺撮像装置をさらに備え、
前記運転者存在判断手段は、周辺撮像装置によって撮像された車両周辺の画像を解析して、人が検出できる場合、前記車両の運転者が前記車両の周辺に存在していると判断し、人が検出できない場合、前記車両の運転者が前記車両の周辺に存在していないと判断することを特徴とする自動駐車装置。
【請求項1】
車両に搭載され、その車両を自動的に走行させて駐車させることができる自動駐車装置であって、
記憶装置と、
前記車両が駐車完了位置に位置したか否かを判断する駐車完了判断手段と、
自動駐車開始条件が成立したか否かを判断する自動駐車開始判断手段と、
車両の走行軌跡に関する軌跡情報を、前記車両が駐車完了位置に位置したと判断されてから前記自動駐車開始条件が成立したと判断されるまで逐次取得して、前記記憶装置に記憶する軌跡情報取得手段と、
前記自動駐車開始条件が成立した場合に、前記記憶装置に記憶されている軌跡情報に基づいて、前記車両が駐車完了位置に位置したと判断されてから前記自動駐車開始条件が成立したと判断されるまでの車両の移動軌跡を逆方向に前記車両を自動走行させて、前記車両を前記駐車完了位置まで移動させる自動走行制御手段と
を含むことを特徴とする自動駐車装置。
【請求項2】
請求項1において、
前記車両の周辺の物体を検出する周辺物体検出装置と、
前記自動走行制御手段によって前記車両が自動走行している間、前記周辺物体検出装置による前記車両の周辺の物体検出結果に基づいて、前記車両が障害物と衝突する危険の有無を判定する危険判定手段と、を備え、
前記自動走行制御手段は、前記危険判定手段によって前記車両が障害物と衝突する危険があると判定されたことに基づいて、前記車両の自動走行を停止することを特徴とする自動駐車装置。
【請求項3】
請求項2において、
前記車両が駐車完了位置に位置したと判断された時点から前記自動駐車開始条件が成立したと判断されるまでの運転者の運転操作によって車両が走行させられる手動走行の間、前記周辺物体検出装置による物体検出結果である手動走行時周辺情報を取得して前記記憶装置に記憶する手動走行時周辺情報取得手段をさらに備え、
前記危険判定手段は、前記自動走行制御手段によって前記車両が自動走行している間の前記周辺物体検出装置による物体検出結果である自動走行時周辺情報と、前記手動走行時周辺情報との比較に基づいて、前記車両が障害物と衝突する危険の有無を判定することを特徴とする自動駐車装置。
【請求項4】
請求項1において、
前記車両の運転者に携帯される携帯機から送信される乗車位置移動信号を受信する車載受信機をさらに備え、
前記自動走行制御手段は、前記車載受信機が前記乗車位置移動信号を受信したことに基づいて、前記車両を乗車可能位置まで自動走行させることを特徴とする自動駐車装置。
【請求項5】
請求項1〜4のいずれか1項において、
前記車両の運転者に携帯される携帯機から送信される走行停止指示信号を受信する車載受信機をさらに備え、
前記自動走行制御手段は、前記車載受信機が前記走行停止指示信号を受信したことに基づいて、前記車両の自動走行を停止することを特徴とする自動駐車装置。
【請求項6】
請求項5において、
前記自動走行制御手段によって前記車両が自動走行している間、前記車両の運転者が前記車両の周辺に存在しているか否かを逐次判断する運転者存在判断手段をさらに備え、
前記自動走行制御手段は、運転者存在判断手段によって運転者が前記車両の周辺に存在していないと判断されたことに基づいて、前記車両の自動走行を停止することを特徴とする自動駐車装置。
【請求項7】
請求項6において、
前記車両の運転者に携帯される携帯機との間で、その携帯機が前記車両の周辺に存在している場合に通信が可能な車載通信機をさらに備え、
前記運転者存在判断手段は、前記車載通信機と前記携帯機との間の通信が可能である場合、前記車両の運転者が前記車両の周辺に存在していると判断し、前記車載通信機と前記携帯機との間の通信が不能である場合、前記車両の運転者が前記車両の周辺に存在していないと判断することを特徴とする自動駐車装置。
【請求項8】
請求項6において、
前記車両の周辺の画像を撮像する周辺撮像装置をさらに備え、
前記運転者存在判断手段は、周辺撮像装置によって撮像された車両周辺の画像を解析して、人が検出できる場合、前記車両の運転者が前記車両の周辺に存在していると判断し、人が検出できない場合、前記車両の運転者が前記車両の周辺に存在していないと判断することを特徴とする自動駐車装置。
【図1】


【図2】
【図3】
【図4】
【図5】

【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2011−141854(P2011−141854A)
【公開日】平成23年7月21日(2011.7.21)
【国際特許分類】
【出願番号】特願2010−3498(P2010−3498)
【出願日】平成22年1月11日(2010.1.11)
【出願人】(502324066)株式会社デンソーアイティーラボラトリ (332)
【Fターム(参考)】
【公開日】平成23年7月21日(2011.7.21)
【国際特許分類】
【出願日】平成22年1月11日(2010.1.11)
【出願人】(502324066)株式会社デンソーアイティーラボラトリ (332)
【Fターム(参考)】
[ Back to top ]