
自動鼻スプレーポンプ試験
【課題】スプレーポンプアセンブリの自動試験を容易にする自動システムを提供する。
【解決手段】システムコンピュータ、ロボットハンドラ、ホルダトレー、アクチュエータおよび分析天秤を有し、システムコンピュータは、ロボットハンドラにコマンドを発行し、スプレーポンプアセンブリ、収集容器、廃棄物収集器、およびノズル先端軽打器を操作して搬送する。ロボットハンドラは、種々の大きさの物体を取り扱って把持された物体と別の物体との接触を感知できる電気機械式グリッパを有する。ロボットハンドラはまた、揺動動作を行うことができる。ホルダトレー、アクチュエータ、および他のシステム素子は、試験対象の物体の有無を検出するセンサを有していても良い。スプレーポンプアセンブリは、コレットを有していてもよく、コレットは、コレットをスプレーポンプに固着するための、先細のねじを切った開口を有する。
【解決手段】システムコンピュータ、ロボットハンドラ、ホルダトレー、アクチュエータおよび分析天秤を有し、システムコンピュータは、ロボットハンドラにコマンドを発行し、スプレーポンプアセンブリ、収集容器、廃棄物収集器、およびノズル先端軽打器を操作して搬送する。ロボットハンドラは、種々の大きさの物体を取り扱って把持された物体と別の物体との接触を感知できる電気機械式グリッパを有する。ロボットハンドラはまた、揺動動作を行うことができる。ホルダトレー、アクチュエータ、および他のシステム素子は、試験対象の物体の有無を検出するセンサを有していても良い。スプレーポンプアセンブリは、コレットを有していてもよく、コレットは、コレットをスプレーポンプに固着するための、先細のねじを切った開口を有する。
【発明の詳細な説明】
【関連出願】
【0001】
本願は、2006年11月10日出願の米国仮特許出願第60/858,257号の利益を主張する。上記の出願の全内容は参照により本願明細書に引用したものとする。
【技術分野】
【0002】
本発明は、自動鼻スプレーポンプを試験する装置に関する。
【背景技術】
【0003】
米国食品医薬品局(FDA)は、定量式スプレーポンプを用いた局部的に作用する鼻スプレーについて、新薬承認申請(NDA)または略式新薬承認申請(ANDA)に準じて、製品品質の研究を行って、バイオアベイラビリティ(BA)を測定し生物学的同等性(BE)を確立することを計画している申請者(例えば、製薬会社)のための一連の業界ガイドラインを策定している。これらのガイドラインでは、処方箋を必要とするコルチコステロイド、抗ヒスタミン薬、および抗コリン薬製品、市販の(OTC)の肥満細胞安定剤クロモグリク酸ナトリウムのBAおよびBEの研究を特に推奨している。推奨しているのは、表1に示す7種の試験とそれらの測定対象と使用段階などであり、それらはすべて実証されている分析方法を用いて行われ、製品の生体外パフォーマンスの特徴を示す。
【0004】
【表1】

【0005】
使用段階の最初(BOL)を、ラベル表示された回数分のプライミング作動を行った後の1回目の操作と定める。使用段階の最後(EOL)を、ラベル表示された、公言している操作回数に対応する操作と定める。
【0006】
表1に挙げられた試験を行う場合、自動作動システムを用いて、オペレータによる薬品送出におけるばらつきを減少させて、製品間の潜在的な差異を検出する感度を上げることを、米国食品医薬品局は推奨している。米国食品医薬品局はまた、力、速度、加速度、ストロークの長さ、および他の関連パラメータを自動作動システムに設定することを推奨している。米国食品医薬品局はさらに、自動作動システムで用いられる設定を適切に選択することを推奨しており、これにより、慣れた患者は製品を適切に使用できる。設定は、ポンプの供給業者から入手可能であるか、または関連パラメータを変化させて手動による操作で生体外パフォーマンスをシミュレートするという探索的研究を行うことによって得ることができる。
【0007】
表1の試験1および7に関して、米国食品医薬品局は特に、器具から送達される(例えば、射出されるまたはアクチュエータから外に出される)薬品質量を判定することを推奨している。これらの米国食品医薬品局の推奨とともに、米国薬局方(USP)は、自動作動システムを有する鼻スプレー製品の送達量の均一性の試験を行うために用いるべき特定の試験方法を提唱している。米国食品医薬品局および米国薬局方は、試験対象の鼻スプレー製品は使用のためのラベル表示および指示の通りに準備されるべきであると推奨しており、これは製品の揺動およびプライミングを行うことを意味しているに他ならない。米国食品医薬品局の勧告にも米国薬局方の勧告にも直接述べられていないが、送達ショット重量(例えば、送達噴霧の重量)を測定することで、ポンプの送達性能の主指標が得られ、また、送達投与の均一性の補助的測定値が得られることが多い。全般的に、これらの勧告は、鼻スプレーの試験に携わる機関に多くの難題を投げかけており、例えば以下に挙げる点が含まれる。
1.生体外での試験を行うために用いられる自動作動システムのための適切な設定をいかに判定するか、
2.生体外での試験を実際に達成できるように、製品に用いられるラベル表示の指示(ラベル表示は(a)揺動の指示、(b)プライミングおよび再プライミングの指示、(c)容器の定格投与数、を含む)をいかに展開させるか、
3.試験データを収集および分析して高い製品品質を保証するのに用いられる試験方法をいかに展開および有効にするか、
4.試験方法を実行して、その結果を記憶するのに用いられるシステムをいかに有効にするか、
5.米国での販売に備えて最初の承認または継続承認を製品が取得するのに必要な時間および資金を最小限に抑えて、上述の法的な勧告を満たすようにこれらの作業をいかに統合するか、などがある。
【0008】
スプレー含量均一性の試験を行うために現在容認されている方法では、作動、サンプル計重、揺動、データ収集、およびデータ分析は主に手動操作に頼っている。ある程度電子的に記録を残しながら自動作動と手動によるサンプルの収集を組み合わせて用いている企業もあるが、紙に記録する完全な手作業による方法を用いている企業もある。
【発明の概要】
【発明が解決しようとする課題】
【0009】
用いられる方法に関わりなく、作動、サンプル収集、および/または計重における手動操作は、人的エラー、生産性の非効率化、オペレータに繰り返しかかるストレス、データの完全性の低下などの問題を伴うことがわかっている。さらに、今日の薬学環境においては、紙に記録するということは、実質的に米国連邦規則第21条第11章(電子記録および署名に関する要件)の遵守に異議を申し立てていることとなる。これらの問題が、生産のボトルネックとなり、かつデータに矛盾がある場合に現行の医薬品および医薬部外品の製造管理および品質管理の基準(cGMP)の要件によりさらなる試験を生じさせる。生産のボトルネックも、さらなる試験も、製造における採算性に深刻な影響を与える。しかし、手動で行われることが最良である処理もある。例えば、収集された投与サンプルを自動サンプル調合システムに移動させる作業を手動とすることは、全面的に受け入れられる。その理由は、サンプル調合システムは、別々の研究室で共有されるものだからである。
【課題を解決するための手段】
【0010】
一実施形態によれば、スプレーポンプアセンブリの試験を行う自動システムは、ロボットハンドラと、複数のスプレーポンプアセンブリおよび複数の収集器を保持するトレーと、スプレーポンプアセンブリのアクチュエータと、天秤のような計重装置とを有する。ロボットハンドラは、スプレーポンプアセンブリおよび収集器を、トレー、スプレーポンプアセンブリのアクチュエータ、および天秤の間で搬送し、スプレーポンプアセンブリの自動試験を容易にする。前記試験には、ショット重量の実施および噴霧の含量均一性試験(スプレー含量均一性試験)が含まれる。トレーは、各スプレーポンプアセンブリおよび収集器のセンサを有し、各スプレーポンプアセンブリおよび収集器の存在を感知する。システムコンピュータは、センサ情報を用いてユーザがトレーに載置するのを助け、システムの適切な動作を保証する。
【0011】
一実施形態では、ロボットハンドラは電気機械式グリッパを有する。電気機械式グリッパは、回転モータと、左ねじおよび右ねじの線形スクリューと、第1および第2のグリッパ素子とを有する。第1および第2のグリッパ素子は、それぞれ、線形スクリューの左ねじ部分および右ねじ部に移動可能に連結されている。そして、線形スクリューは回転モータに連結されている。システムコントローラが回転モータに制御信号を送信すると、回転モータは線形スクリュレールアセンブリを駆動して、第1および第2のグリッパ素子を反対の直線方向に移動させる。
【0012】
第1および第2のグリッパ素子はジョーを有し、両グリッパ素子を近づけるように駆動される場合は物体(例えば、スプレー装置アセンブリ)を把持し、両グリッパ素子が離れるよう駆動される場合は物体を解放する。両グリッパ素子は、可動ジョーとセンサとを有し、ジョーの動きを感知する。例えば、ロボットハンドラがジョーによって把持された物体を静止物体に向かって移動させると、そのジョーによって把持された物体が静止物体に接触した後ロボットハンドラは同一方向に移動し続ける。
【0013】
スプレーポンプアセンブリはスプレーポンプクランプを有する。このスプレーポンプクランプがあれば、ロボットハンドラまたはアクチュエータはスプレーポンプをより容易に扱うことができる。クランプは、ねじを切った開口を有する。この開口は、クランプの中心軸のまわりの中央位置に設けられ、クランプの底部側に第1の直径を有し、クランプの上端側に第2の直径を有する。クランプの開口にノズル先端を挿入すると同時にクランプがノズル先端に固定されるまでクランプを回転させることで、クランプはスプレーポンプのノズル先端に固定される。
【0014】
システムは、さらに、ノズル先端軽打器を有する。ロボットハンドラはこのノズル先端軽打器を用いてスプレーポンプのノズル先端の汚れをなくすように保つ。一実施形態では、ノズル先端軽打器は、基部、吸収パッド、および可撓性パッドを有する。可撓性パッドは基部に取り付けられ、吸収パッドは可撓性パッドに取り付けられる。可撓性パッドは、吸収パッドの洗浄機能を向上させる。
【0015】
スプレーポンプアセンブリの試験を行う自動システムの別の実施形態では、システムは、第1試験装置を有する第1試験領域(第1試験区域)と、第2試験装置を有する第2試験領域(第2試験区域)と、第1試験領域と第2試験領域とをつなぐ昇降アセンブリと、昇降アセンブリに取り付けられたスプレーポンプアセンブリアクチュエータとを有する。昇降アセンブリは、アクチュエータを第1試験領域および第2試験領域の間で移動させて、スプレーポンプアセンブリの多数の試験を自動的に行う。システムの第1試験領域では、スプレーポンプアセンブリを取り扱って搬送するロボットハンドラを用いる。一つの例示的な実施形態では、第1試験装置は分析天秤であり、第2試験装置は、(i)スプレーパターンを測定するように構成されたカメラおよび第1レーザ、または(ii)レーザ回折を通して液滴径分布を測定するように構成された第2レーザと受光部、または(i)と(ii)の両方を備える。
【0016】
上記内容は、添付図面に示される本発明の例示的実施形態についての以下のさらに具体的な説明から明らかになるであろう。図面において、同一の参照符号は、異なる図の全てを通して同一部分を指す。図面は必ずしも縮尺通りでなく、本発明の実施形態を説明することに重点が置かれている。
【図面の簡単な説明】
【0017】
【図1】一実施形態による投与含量均一性(DCU)およびポンプ送達試験のための自動スプレーポンプ試験システムの正面図である。
【図2A】図1の試験システムの試験領域の正面図である。
【図2B】図2Aの試験領域の上面図である。
【図2C】自動スプレーポンプ試験システムのブロック図であって、システム要素の例を示す図である。
【図3】一実施形態によるアクチュエータ、天秤および先端軽打器アセンブリを含む試験領域を示す斜視図である。
【図4A】スプレーポンプ装置の試験を行う処理の一例を示すフローチャートである。
【図4B】スプレーポンプ装置の試験を行う処理の一例を示すフローチャートである。
【図4C】スプレーポンプ装置の試験を行う処理の一例を示すフローチャートである。
【図5A】一実施形態によるアクチュエータの斜視図である。
【図5B】一実施形態によるアクチュエータの斜視図である。
【図5C】一実施形態によるアクチュエータの斜視図である。
【図6】アクチュエータ内にスプレーポンプ装置を固着する処理の一例を示すフローチャートである。
【図7A】一実施形態によるロボット装置の斜視図である。
【図7B】一実施形態によるロボット装置の斜視図である。
【図8】電気機械式グリッパの可動ジョーのセンサからのフィードバックに基づいて、ロボットハンドラを制御する処理の一例を示すフローチャートである。
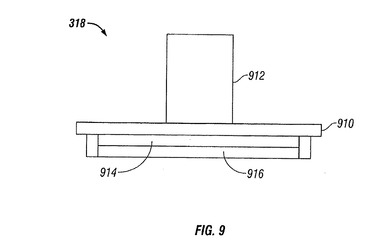
【図9】一実施形態によるノズル先端軽打器の一例を示す断面図である。
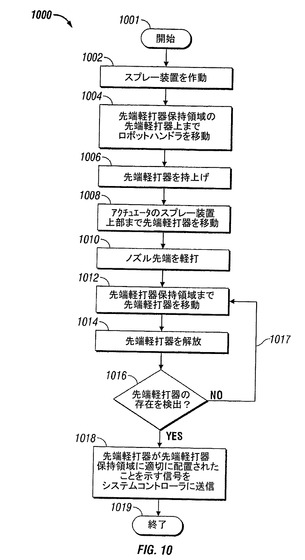
【図10】ノズル先端軽打器の使用法を示す図であって、スプレーポンプ装置の試験を行う処理の一例を示すフローチャートである。
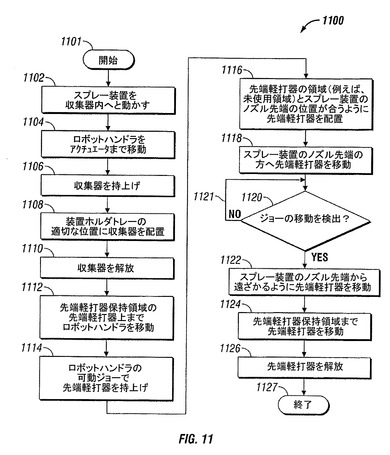
【図11】ノズル先端軽打器の使用法を示す図であって、スプレーポンプ装置の試験を行う処理の一例を示すフローチャートである。
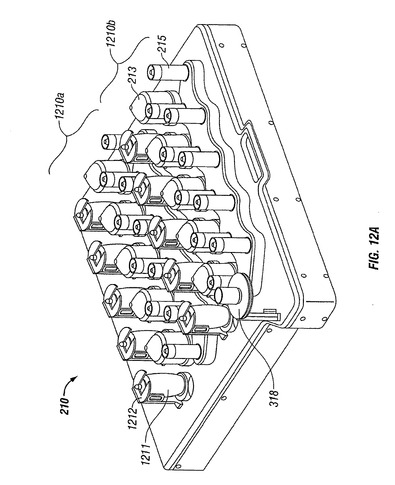
【図12A】一実施形態による、満載されたホルダトレーの斜視図である。
【図12B】図12Aのホルダトレーの側面図であって、一実施形態によるホルダトレーセンサシステムを示す図である。
【図13】図12Bのホルダトレーセンサシステムの使用を示す処理の一例を示すフローチャートである。
【図14A】一実施形態によるスプレーポンプ収集アセンブリの斜視断面図である。
【図14B】一実施形態によるスプレーポンプ収集アセンブリの斜視断面図である。
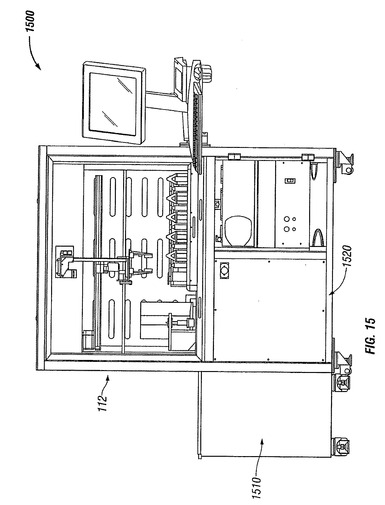
【図15】DCU,ポンプ送達、スプレーパターン、および液滴径分布試験のための自動スプレーポンプ試験システムの一実施形態の正面図である。
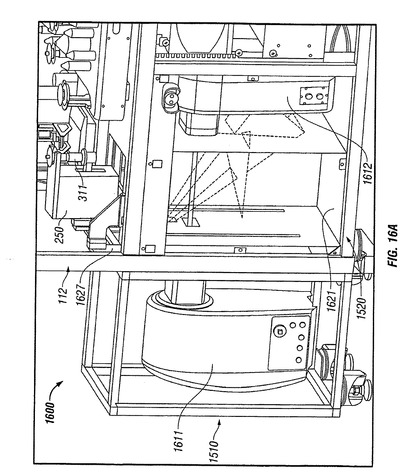
【図16A】光学測定3次元領域と、光学装置スプレーパターンおよび液滴径分布試験アセンブリの斜視図である。
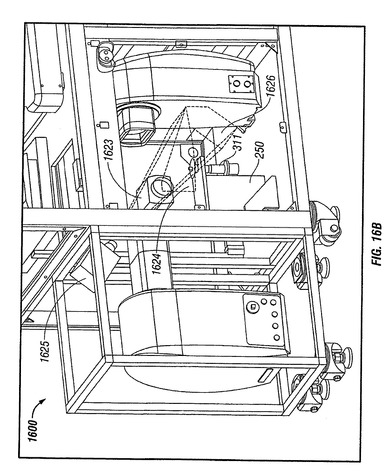
【図16B】図16Aの拡張3次元領域の斜視図であり、スプレーパターン試験を示す図である。
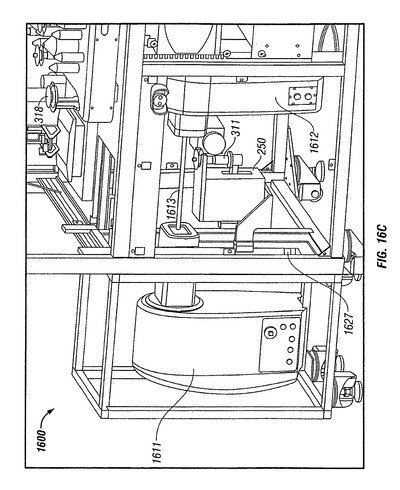
【図16C】図16Aの拡張3次元領域の斜視図であり、液滴径分布試験を示す図である。
【図17】図15の自動スプレーポンプ試験システムを用いてスプレーポンプ装置の試験を行う処理のフローチャートである。
【発明を実施するための形態】
【0018】
本発明の例示的実施形態を以下に説明する。
【0019】
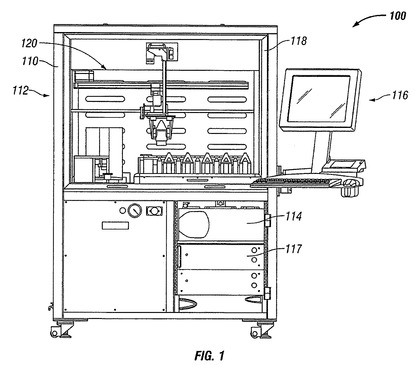
図1は、本発明の一実施形態による自動スプレーポンプ試験システム100の正面図である。この自動スプレーポンプ試験システムは、鼻スプレーポンプボトルのようなスプレーポンプすなわちエアロゾル装置の投与含量均一性(DCU)およびポンプ送達試験を高処理能力で自動的に行う。このシステム100はまた、自動的にプライミング(空気抜き)または再プライミングの試験を行い、ユーザが試みているスプレー製品についての種々の揺動方法を確認する。上述のように、スプレーポンプ装置の試験の手動による手法は、生産環境において、単調であり、時間を費やし、エラーを生じやすい。これに対して、自動スプレーポンプ試験システム100は、スプレーポンプすなわちエアロゾルの製剤の試験に携わる機関のための「認可までの時間」を大幅に短縮する。
【0020】
以下に詳しく説明するように、自動スプレーポンプ試験システム100の実施形態は、表2に述べる例示的な特徴および利点を包含する。
【0021】
【表2】
【0022】
表2に示すように、自動スプレーポンプ試験システム100の実施形態は、電気的およびコンピュータネットワークのインタフェースを有するスタンドアロンのシステムである。スタンドアロンのシステムは種々の利点を有する。例えば、迅速な計重を行う優れた振動絶縁性、設備および動作の管理の簡素化、作業スペースや可用性などの実験室によるばらつきがなく、空気の流れとガスの排出がないこと、実証済み技術の統合、などである。
【0023】
システム100は一体化されたスチールフレーム110を有し、システムの試験・測定装置のために構造を簡素化して振動から隔離する。システム100の構成要素は、試験領域112、システムコンピュータ114、システムコントローラ117、および入出力(I/O)装置116などである。入出力装置116をが、ユーザとシステム100とのインタフェースである。図1に示すように、試験領域112はユーザが利用しやすい高さに配置される(例えば、ユーザが座っている状態または立っている状態で容易に届く)。システムコンピュータ114およびシステムコントローラ117が統合されていることにより、ケーブルの配線、組み立て、および点検が簡素化されている。
【0024】
システム100の試験領域112はロボット装置ハンドラ120を有する。このロボット装置ハンドラ120は、試験領域112内で安全かつ確実に装置および収集器を取り扱って搬送する。本実施形態では、ロボット装置ハンドラ120は、インテリジェントな4軸に設計されており、種々の形状および大きさのスプレー装置を取り扱うことができる。本実施形態によれば、ロボット装置ハンドラ120は、スプレー装置の揺動、内部への作動であるノズル先端の軽打またはクリーニングを行うようにプログラムされている。ロボット装置ハンドラ120は高度に自動化された動作を行う。システム100は、装置およびサンプルの装填と取り外し、およびエラー状態(例えば、ネットワークが利用できない、装置または収集容器の取り扱いを誤る、空気の流れが悪い)を処理する以外は、ユーザの介入無しに動作する。また、システム100は、クリーニング以外の定常的なメンテナンスなしに、その日に薬剤生産装置を利用できる時間にわたって、連続して動作する。
【0025】
試験領域112は、スチールフレーム110およびスライド式ガラスアクセスドア118内に収容されている。スライド式ガラスアクセスドア118は、オペレータにとって、スプレー装置サンプルを装填したり取り出したりするための、試験領域112へのインタフェースとなる。スライド式ガラスアクセスドア118は、システムの試験・測定装置に静電荷が蓄積されることの影響を軽減し、オペレータの安全を適切に図るために強化ガラスパネルを有する。
【0026】
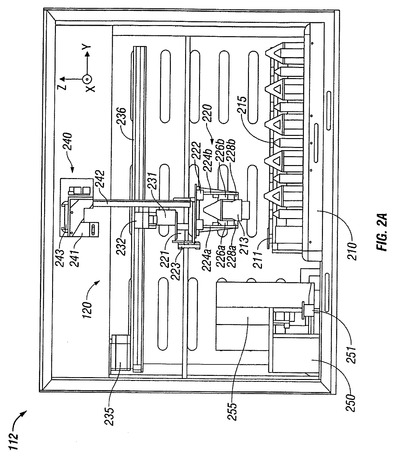
図2Aは図1の試験領域112の正面図であり、特にロボットハンドラ120を詳細に示す。試験領域112は、ロボットハンドラ120、ホルダトレー210、アクチュエータ250、および分析天秤255を搭載している。ロボットハンドラ120は、スプレー装置311(図3に関連して後述する)、収集容器215、および廃棄物収集器213を、ホルダトレー210、アクチュエータ250、および分析天秤255に搬送するように、またはこれらから搬送するように、命令される。以下にさらに詳細に説明すると、ロボットハンドラ120は、種々の形状と大きさのスプレー装置311、収集容器215、および廃棄物収集器213を取り扱うよう設計されている。例えば、ロボットハンドラ120は、プラスティックの試験管や遠心管などの市販の薬剤収集容器を扱うことができる。ロボットハンドラ120は、さらに、液剤が漏れたり汚染したりすることがないように、スプレー装置311、収集容器215、および廃棄物収集器213を搬送する設計およびプログラムとされている。例えば、一実施形態では、ロボットハンドラ120は、スプレー装置311、収集容器215、または廃棄物収集器213に蓋をするように設計およびプログラムされている。別の実施形態では、ロボットハンドラ120は、溶媒の添加、混合、濾過などの化学分析サンプルの調合を行うように設計およびプログラムされている。
【0027】
ロボットハンドラ120はスプレー装置または収集器を把持および解放する電気機械式グリッパ220を有することを特徴とする。この電気機械式グリッパは、可動部の数を最低限に抑えるように設計されている。電気機械式グリッパは2つの剛性のグリッパ素子224a,224b、すなわち可動ジョー226a,226bおよび固定ジョー228a,228bを有するグリッパアームを備える。グリッパ素子224a,224bは、低質量で高性能の線形スクリュレールアセンブリ222に移動可能に連結されている。線形スクリュレールアセンブリ222は、半分が左ねじ仕様で、残り半分が右ねじ仕様である、スクリュレールスピンドルを有する。線形スクリュレールアセンブリ222は、また、ドライブカプラ223を介して回転モータ221に接続される。ドライブカプラ223は、2つのプーリと1つのドライブベルトを有する。この構造において、回転モータは線形スクリュレールアセンブリ222を駆動して、グリッパ素子224a,224bを反対の方向に(回転モータ221が線形スクリュレールアセンブリ222を駆動する回転方向に応じて、お互いが近づく方向またはお互いから離れる方向に)移動させる。
【0028】
電気機械式グリッパ220は、垂直方向に延びる線形スクリュレールアセンブリ242およびz軸モータアセンブリ240に接続している。ロボットハンドラ120のz軸方向寸法は大きく設計されており、振動を引き起こさないようにしている。垂直(z軸)方向に延びた線形スクリュレールアセンブリ242はx軸スクリュレールアセンブリ232に移動可能に連結されている。z軸モータアセンブリ240の回転モータ241が、垂直方向に延びた線形スクリュレールアセンブリ242を駆動すると、垂直方向に延びた線形スクリュレールアセンブリ242は、電気機械式グリッパ220およびz軸モータアセンブリ240とともに、z軸に沿って、x軸線形スクリュレールアセンブリ232に対して(システム100に対して)移動する。別の回転モータ231がx軸線形スクリュアセンブリ232(図2Bも参照のこと)に接続されており、回転モータ231がx軸線形スクリュアセンブリ232を駆動すると、x軸線形スクリュアセンブリ232は、垂直方向に延びた線形スクリュレールアセンブリ242をz軸モータアセンブリ241および電気機械式グリッパ220とともに、x軸に沿って移動させる。
【0029】
x軸線形スクリュアセンブリ232は、第1のy軸線形スクリュアセンブリ236および第2のy軸線形スクリュアセンブリ238(図2B参照)に移動可能に連結されている。y軸モータ235は第1および第2のy軸線形スクリュアセンブリ236,238をy軸のドライブカプラ237(図2B参照)を介して駆動し、x軸線形スクリュアセンブリ232を、x軸線形スクリュアセンブリ232に取り付けられたアセンブリ220,240,242とともに、y軸に沿って移動させる。4軸(x,y,y’(電気機械式グリッパの線形スクリュレールアセンブリ222の軸),およびz)の動きで、ロボットハンドラは、試験領域112で、軌道上およびいわゆるジャーク振動などの種々の揺動機能を含む種々の機能を、さらに以下で述べるように果たすことができる。
【0030】
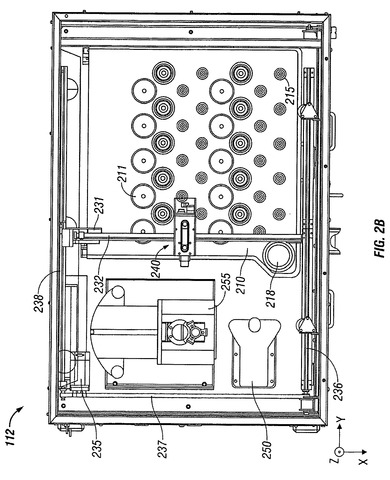
図2Bは、図2Aの試験領域112の上面図である。図2Bはx−y面すなわち水平面での動きを可能とするロボットハンドラ120の構成部品をより明確に示す。z軸モータアセンブリ240は、z軸線形スクリュアセンブリ242および電気機械式グリッパ220(図2A参照)とともに、x軸線形スクリュアセンブリ232に移動可能に連結している。そして、x軸線形スクリュアセンブリ232は、上述の第1および第2のy軸線形スクリュアセンブリ236,238に移動可能に連結している。y軸モータ235は、ドライブカプラ237を介して第1および第2のy軸線形スクリュアセンブリ236,238を駆動して、x軸線形スクリュアセンブリ232を、取り付けられたアセンブリ220,240,242と共にy軸に沿って移動させる。
【0031】
図2Bに示すように、ホルダトレー210は、10個のスプレー装置311(スプレー装置アセンブリ211として図示)、対応する10個の廃棄物収集器213,スプレー装置311毎に2つの収集容器215(合計20個の収集容器215)、およびノズル先端軽打器218を保持する。ホルダトレー210の本実施形態は、10個のスプレー装置についての投与含量均一性試験用に構成されており、あるスプレー装置に対応する2つの収集容器215の1うちの一方は使用開始時の計測のためのものであり、他方は使用終了時の測定のためのものである。ホルダトレー210はまた、ポンプ送達試験用にも構成されている。ポンプ送達試験では、収集容器215は、10個のさらなるスプレー装置311に置き換えられる。ホルダトレー210の他の実施形態では、種々の形状と大きさのスプレー装置、収集容器、および廃棄物収集器が保持される。
【0032】
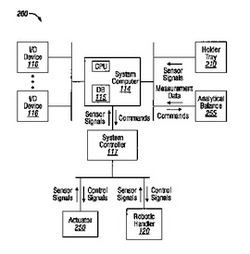
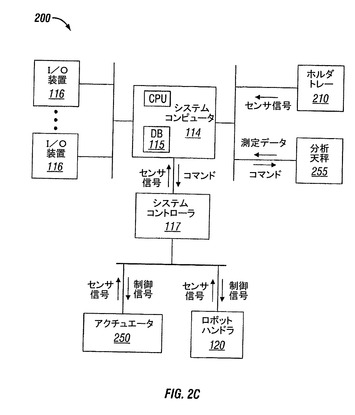
図2Cは自動スプレーポンプ試験システム200のブロック図であり、システム要素およびシステム要素間の相互作用の例を示す。システムコンピュータ114はプログラム可能な方法を実行して、システムコントローラ117にコマンドを発行する。システムコンピュータ114はデータ収集のために承認された方法および開発中の(例えば、未承認の)方法を実行する。方法は適切な権限を持ったユーザによって承認されてもよい(開発段階から格上げされてもよい)。同様に、認可を受けたユーザは、方法を取り下げてもよい(例えば、その方法が実行されるのを防ぎ、この方法に関連した閲覧用のデータを全て残しておいてもよい)。この方法はユーザ定義可能なパラメータを含み、このパラメータは、作動プロファイル、揺動プロファイル、ならびにプライミング、廃棄および計重を含む作動イベント履歴全体に関するものである。100回分(100ショット)装置の1セットについての方法すなわち作動イベントプロファイルの例を表3に示す。
【0033】
【表3】
【0034】
システムコントローラ117は、システムコンピュータ114からのコマンドと、ロボットハンドラ120およびアクチュエータ250に一体的に組み込まれたセンサからのセンサ信号とに基づいて、ロボットハンドラ120およびアクチュエータ250の動きを制御するように制御信号を生成する。以下にさらに詳細に説明するように、ホルダトレー210はまた、各スプレー装置311、各廃棄物収集器213、各収集容器215、およびノズル先端軽打器218の有無を感知するセンサを有する。システムコンピュータ114は、分析天秤255からの測定データ、およびホルダトレー210、アクチュエータ250、またはロボットハンドラ120からのセンサ信号を受信、処理して、入出力(I/O)装置116を経由して表示するよう構成されている。例えば、システムコンピュータ114は、ホルダトレー210からのセンサ信号を処理し、いずれの要素(例えば、スプレー装置、廃棄物収集器、収集容器)を挿入するべきか、およびいずれの場所に挿入するべきかを、ユーザにI/O装置116を通して、視覚的にまたは他の方法で示す。
【0035】
上記表2に示したように、システム100はさらに、スプレーの製剤にユーザが長時間曝される悪影響を最低限に抑えるために、空気処理サブシステムを搭載する。例えば、空気処理サブシステムは、臭気の除去および/または抑制を実行する。空気処理サブシステムはまた、炭素を用いた濾過を行い、試験領域112内全体に十分空気が流れるようにする。ただし、空気処理サブシステムは、空気の流れが分析天秤255の性能を損なわないように設計されている。
【0036】
システムコンピュータ114は、測定データまたは他のシステム情報を記憶するためのデータベース115を有する。さらに、システムコンピュータ114は、米国連邦規則第21条第11章および他の社内規格(例えば、作動システムおよび方法)を遵守し、一貫したデータの記憶と検索フォーマットのために、セキュリティ保護されたデータベースソフトウェアプラットフォーム上で作動する。ソフトウェアプラットフォームは多数回の装置の作動すなわち「作動イベント」から得られる結果を処理することに重点が置かれる。作動イベントは、イベントが生じた装置(例えば、ロット番号または製造バッチIDなどの一意の識別番号)に直接結び付けられるとともに、誰がこの装置を作動させたか、いつ作動されたか、などの他の情報にも直接結び付けられる。さらに、装置の種類、ロット番号および装置識別子によって作動イベントをひとまとめにして、データ管理および分析を簡素化し、完全な試験作動履歴が作成される。
【0037】
システムソフトウェアは、中核となる記録管理主体サブシステムとして、関連データベース管理システムを用いる。このシステムソフトウェアでは、スプレー薬品試験(例えば、取得、処理、分析など)に関する機械読取りおよび人間読取りが可能なデータをユーザは管理することができ、これにより企業は以下のことが可能である。
・電子記録/電子署名(「ER/ES」)に関する米国連邦規則第21条第11章を遵守し(新しいユーザ)、または米国連邦規則第21条第11章の遵守を継続(既存のユーザ)する。
・機械読取り可能なデータを、ネットワーク、CD、またはDVDの記憶場所など、安全で、安定し、セキュリティ保護された媒体にアーカイブしてその媒体から取り出す。
・人間読取り可能なデータおよび機械読取り可能なデータとの間のトレーサビリティを確立する(例えば、全ての動作について、「誰、何、いつ、どこ、なぜ」)。ここで、データ、システム、および試験対象の製品に行われた全ての動作の履歴を確立することに特に重点を置いている。
【0038】
システムコンピュータ114および対応するシステムソフトウェアは、以下の例のエラーイベント(任意の他の重大なシステムイベントとともに)を適切に処理することができる。
1.ホルダトレー、天秤、グリッパ、または作動システムに装置または収集容器が無い
2.長時間のAC電力損失
3.適切に臭気を抑制するためのシステム内にわたる空気の流れが不十分である(警告イベントを生じさせなければならないが、システムの動作は停止すべきではない)
4.ロードセル較正エラー
5.ネットワークが利用できない(データベースがネットワークサーバに配置されている場合)
6.データベースが利用できない
7.緊急停止ボタンをユーザが押下
8.安全ドアがロックされていない
9.ユーザのログオン失敗
【0039】
システムエラーに応答して、システムコンピュータ114は自動的に追跡記録イベントを生成する。
【0040】
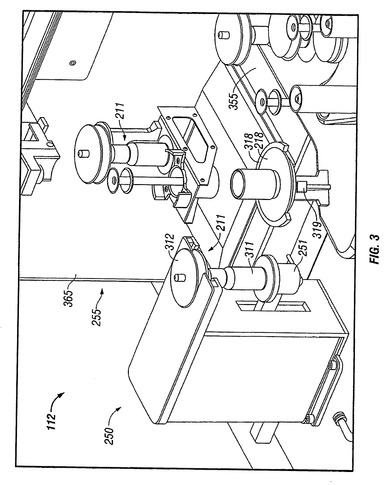
図3は、一実施形態によるアクチュエータ250、天秤255、およびノズル先端軽打器アセンブリ(218,318,319)を含む試験領域112を示す斜視図である。アクチュエータ250は、スプレー装置アセンブリ211を保持して作動させる。スプレー装置アセンブリ211はスプレーボトル311およびコレット312を有する。本実施形態では、動力カプラ(force coupler)251がスプレーボトル311を作動させるように、アクチュエータ250がコレット312を固定する。
【0041】
天秤255すなわち計重装置は、グラナイトテーブル355上に載置されている。そして、グラナイトテーブル355は、振動パッドを介してメタルフレーム110(図1)上に配置される。グラナイトテーブル355および振動バッドは、システムの他の部品(例えば、アクチュエータ250もしくはロボットハンドラ120)によって生じる振動、またはシステム100の外で発生した振動から、天秤255を隔離する。このようにして、天秤255は、USP<41>を実質的に遵守して、個々のショットを計重する。なお、USP<41>は、迅速で正確な計重を容易に行えるように、天秤の、安定して振動の少ない取り付けを要求している。天秤は、ガラスの筐体356を有し、この筐体356が、空気の流れおよび静電力が重量測定に影響を及ぼすことを防止する。
【0042】
システム100は、ユーザがプログラム可能な入力に従って、送達投与/ショットおよび/または計量投与/ショットの重量を、高い分解能(例えば、0.1mg)で、自動的に測定する。送達ショット/投与の重量(送達投与重量)は、適切な収集装置(例えば、廃棄物収集器または収集容器)の作動前と作動後の重量の差として計算される。すなわち、送達投与重量とは、収集によって得られた重量のことである。一方、計量投与重量は、スプレー装置の作動前と作動後の重量の差として計算される。すなわち、計量投与重量は、スプレー装置から排出された重量のことである。表4は、試験測定、測定モード、および計重する要素を示す。
【0043】
【表4】
【0044】
分析天秤255は、2つの内部較正用おもり(最低3ポイントの目盛補正を行う)を用いて自動的に較正される。この自動較正処理は、(例えば、日単位、週単位、月単位で)プログラムされ、システム100の通常の動作の一部として実行される。
【0045】
ノズル先端軽打器218は、ノズル先端軽打器218の存在を感知するセンサ319を有するノズル先端軽打器ホルダ318内に格納される。以下でさらに述べるように、ノズル先端軽打器218は、スプレー装置のノズル先端に、スプレーボトル311の性能に影響を及ぼす可能性のある残留物が残らないよう保つために用いられる。
【0046】
鼻スプレー製剤の多くは、揺変性懸濁液として調合され、機械式のポンプ装置を介して送達される。揺変性材料は、加わる剪断力または剪断速度が増加すると粘度が低下し、剪断負荷が取り除かれると時間とともにもとに戻る。(トマトケチャップが揺変性材料の良い例である、なぜなら、例えば、短いストローク、ジャーク作用揺動などの十分な剪断力がかからないと、トマトケチャップは容器から流れ出さないため)。鼻スプレー製剤の揺変性質は、放出される噴霧の性能に甚大な影響を与える可能性がある。そのため、作動およびその後のショット重量測定にスプレー装置を適切に準備するために、システムコンピュータ114の実施形態は、ロボットハンドラ120を用いて種々の揺動ルーチンを行うようにプログラムされる。
【0047】
あるスプレー装置では、揺動ルーチンは、垂直軸からスプレー装置を傾けてはならず、製剤を泡立たせてはならない。現行の実験室での慣行の調査および多くの鼻スプレー製剤の特性に基づくと、揺動ルーチンは以下の2つのモードのいずれかで動作する。
・垂直方向または斜め方向にして、大きな剪断揺動を生じさせる高加速度(ジャーク動作)モード、
・水平方向にして、緩やかな揺動を生じさせる平面(軌道作用)モード。
【0048】
両方のモードが、振幅、周波数、および継続時間を含む、揺動ルーチンの種々のパラメータを用いてプログラムされる。種々の実施形態において、揺動ルーチンは、試験実行前または試験実行中に行われる。
【0049】
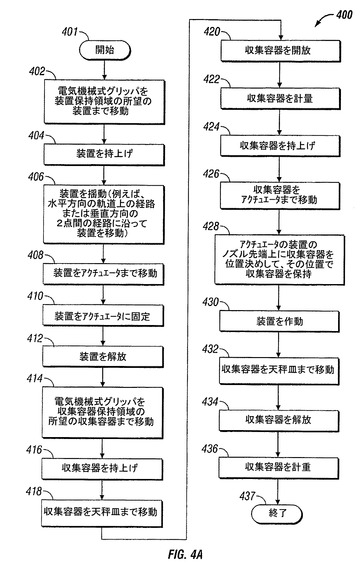
図4Aは、送達測定モード(表4)を用いるスプレーポンプ装置の投与含量均一性試験を行う処理400の一例を示すフローチャートであり、選択的な揺動ルーチンを含む。開始(ステップ401)の後、システムコンピュータはロボットハンドラに(システムコントローラ経由で)コマンドを発行して、ロボットハンドラを装置保持領域(例えば、トレー210)の所望の装置まで移動させる。このステップでは、電気機械式グリッパを所望の装置の周りに配置する。システムコンピュータは、ロボットハンドラにコマンドを与え、ステップ404で装置を持ち上げる。システムコンピュータはロボットハンドラにコマンドを与え、ステップ406で装置を揺動するが、これはステップ408で装置をアクチュエータまで移動させる前、最中、または後に行われる。例えば、揺動コマンドは、水平方向の軌道上の経路または垂直方向の2点間の経路に沿って、装置を移動させるコマンドを含む。垂直方向または斜め方向の2点間の経路では、ロボットハンドラは、大きい加速度で垂直方向の経路に沿って装置を移動させて人が行うようなジャーク動作をシミュレートするように命令される。他の実施形態では、ロボットハンドラは回転揺動機能を持つように設計される。
【0050】
ステップ408で装置をアクチュエータまで移動させた後、システムコンピュータはロボットハンドラにコマンドを与え、ステップ410で装置をアクチュエータに固定し、ステップ412で装置を解放する。ステップ414から418において、システムコンピュータはロボットハンドラにコマンドを発行する。具体的には、ステップ414で電気機械式グリッパを収集容器保持領域の所望の収集容器まで移動させて、ステップ416で収集容器を持ち上げて、ステップ418で収集容器を天秤皿まで移動させる。ステップ420でロボットハンドラが収集容器を解放した後、ステップ422で天秤が収集容器を計重する。
【0051】
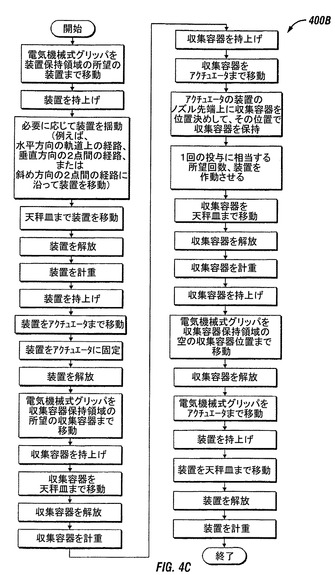
ステップ422で収集容器を計重した後、ステップ424でロボットハンドラは収集容器を持ち上げて、ステップ426でアクチュエータまで移動させる。ステップ428でロボットハンドラは収集容器をアクチュエータの装置のノズル先端上に位置決めして、収集容器をその位置で保持する。ステップ430で、システムコンピュータは、アクチュエータにコマンドを発行して、1回の投与に相当する回数だけ繰り返して装置を作動させる(例えば、多くの場合、1つの鼻孔につき1回の作動が相当するため、1回分の投与には2回の作動が必要である)。終了(ステップ437)の前に、ステップ432でロボットハンドラは収集容器を天秤皿まで移動させ、ステップ434で収集容器を解放して、ステップ436で天秤により計重される。
【0052】
処理400と同様の処理において、廃棄物収集器を収集容器の代わりに使用して送達測定モード(表4)を用いてスプレー装置のポンプ送達試験を行うことができる。表5はロボットハンドラ120の基本的な動作および機能の例を代表的に示す。「持ち上げる」と「解放する」という用語は、ロボットハンドラが出来うることを表し、ロボットハンドラが実際にそれをいかに行うかは表していないことは言うまでもない。
【0053】
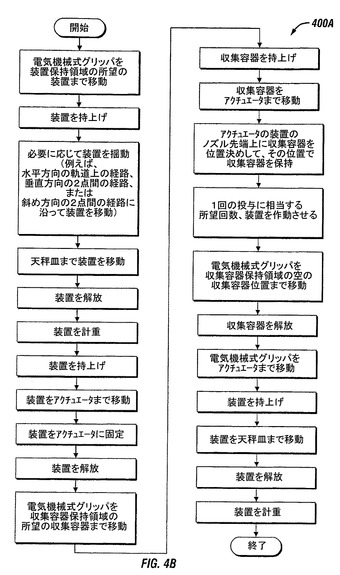
処理400と同様の処理において、図4Bは、計量測定モード(表4)を用いてスプレー装置の投与含量均一性試験を行う処理400Aの一例を示すフローチャートである。処理400Aと同様の処理で、廃棄物収集器を収集容器の代わりに用いて、計量測定モード(表4)を用いてスプレー装置のポンプ送達試験を行う。処理400および400Aを組み合わせて、図4Cに示す新たな処理400Bとして、送達測定モードおよび計量測定モード(表4)を用いてスプレー装置の投与含量均一性を計測してもよい。処理400Bと同様の処理で、廃棄物収集器を収集容器の代わりに使用して、送達測定モードおよび計量測定モード(表4)を用いてスプレー装置のポンプ送達試験を行ってもよい。
【0054】
【表5】
【0055】
システム100の実施形態では、種々の作動測定モードを用いる。プライミングモードでは、システムコンピュータ114がアクチュエータから取得した、時間に対する力および位置のプロファイルをデータベース115に記録する。個々の容器の重さを差し引く(風袋の)送達ショット重量または計量ショット重量のモードでは、システム100は、各作動後に天秤255での風袋重量に基づいて各ショットを計重する。両方のモードでは、廃棄物収集器213は所与の試験方法に従って各ショットを収集する。送達ショット重量の測定では廃棄物収集器が計重され、計量ショット重量の測定では装置が計重される。投与含量均一性モードでは、システム100は、適切な大きさの収集容器(例えば、標準的な実験室用の収集管)に個々の投与を収集して、作動の前後での収集容器の重量差分を測定することでショットの重量を記録する(つまり、送達ショット重量法)。
【0056】
上述のシステム100は、ショット1回当たりで見た場合に、少なくとも熟練した実験室の技術者の能力に合わせることができる。システム100の試験稼働は、各作動後のノズル先端を軽打して天秤の風袋重量を測るものであり、このシステム100の試験稼働に基づいて、熟練した実験室の技術者は、平均して、メトラー・トレド(Mettler-Toledo)社製のAX−204 4交換機構の分析天秤を用いて25分間に約50の送達ショット重量の測定値(または平均して30秒ごとに1回の測定値)を収集できる。システム100の実施形態は、通常の操作状態では機械の不具合によってショット重量の読み間違いが起こらないように設計されている。
【0057】
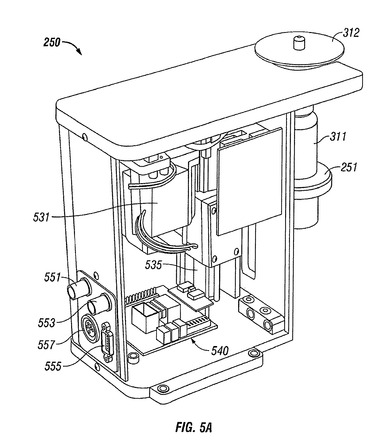
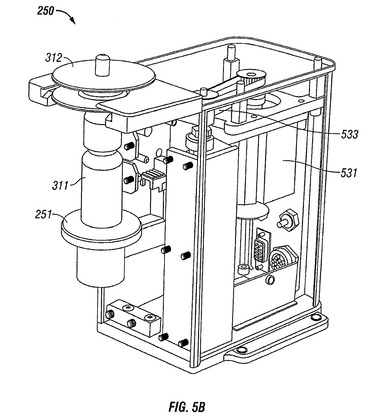
図5A〜図5Cは、アクチュエータ250の一実施形態の斜視図であり、一実施形態による内部の構成部品を示す。アクチュエータ250の本実施形態は、回転モータ531、駆動伝達部材535(上記では「線形スクリュレールアセンブリ」と称している)、動力カプラ251、およびアクチュエータ電子回路540を備える。動力カプラ251は、アクチュエータ電子回路540と電気的に交信する動力トランスデューサを有してもよい。駆動カプラ533は2つのプーリと1つの駆動ベルトとを有する。プーリの一方は、モータースピンドルとともに回転するように、回転モータ531の回転駆動出力(つまり、モータスピンドル)に取り付けられている。他方のプーリは、スクリュレールスピンドル532とともに回転するように、線形スクリュレールアセンブリ535の線形スクリュレールスピンドル532に取り付けられている。駆動ベルトは、2つのプーリが同期回転するように、この2つのプーリを連結している。
【0058】
動力カプラ251は線形スクリュレールアセンブリ535に連結されており、これにより、モータ531がスクリュレールスピンドル532を駆動する。そして、このスクリュレールスピンドル532は動力カプラ251を駆動して、スプレーボトル311を作動する。アクチュエータ電子回路540は、コネクタ551,553,555を経由して、システムコンピュータ114およびシステムコントローラ117と交信する。例えば、アクチュエータ電子回路540は、システムコンピュータ114からコマンドを受信して、所定の力を印加することでスプレーボトル311を作動する。アクチュエータ250はまた、電源コネクタ557を有し、この電源コネクタ557を介して、アクチュエータ電子回路540、モータ531およびアクチュエータの他の部品に電力を供給する。
【0059】
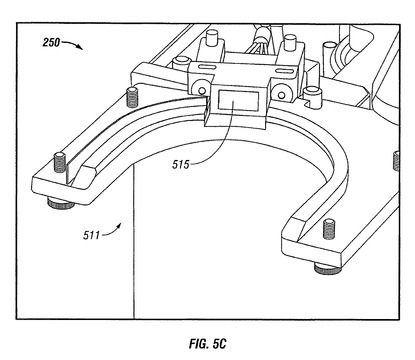
アクチュエータ250は、コレット312を受け入れてコレット312をアクチュエータ250に固定する受入部511を有する。アクチュエータ250はさらに、コレット312の存在を感知するセンサ515を有する。センサは、光電子センサ、磁気センサ、またはコレット312の存在を検出する他のセンサである。センサ515は、センサ電子回路540を介して、システムコンピュータ114にセンサ信号を交信(伝達)できる。受入部511にはばねが装着されており、作動中はスプレー装置を所定位置に堅固に固定する。
【0060】
図5A〜図5Cに示すように、アクチュエータ250は、従来の鼻スプレーポンプの上向きの圧縮作動と、垂直方向のスプレー噴煙とを結び付けるように構成されている。アクチュエータ250の他の実施形態は、上述した実施形態と同一の内部部品(例えば、駆動機構)を有するが、スプレー装置の横または上向きの圧縮作動と、水平方向または垂直方向のスプレー噴煙とを結び付けるように構成されている。
【0061】
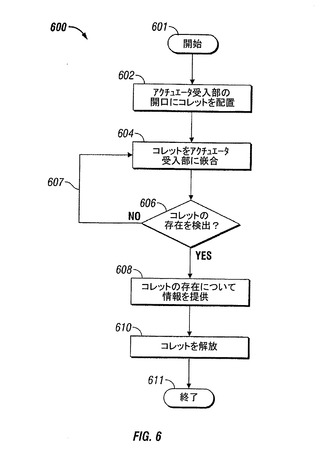
図6は、アクチュエータ内にスプレーポンプ装置を固定する処理600の一例を示すフローチャートである。開始(ステップ601)の後、ステップ602でロボットハンドラはアクチュエータ受入部の開口にコレットを配置して、ステップ604でアクチュエータ受入部内にコレットを嵌め込む。受入部センサがコレットの存在を検出すると、ステップ608でコレットの存在についての情報をアクチュエータ電子回路がシステムコンピュータに提供する。受入部センサがコレットの存在を検出しなければ、ステップ607に進み、ロボットハンドラはステップ604で再びコレットをアクチュエータ受入部に嵌め込むことを試みる。終了(ステップ611)の前に、ロボットハンドラは、例えば、DCU試験のために収集容器または廃棄物収集器を取得する処理に進むように、ステップ610でロボットハンドラはコレットを解放する。
【0062】
図7Aおよび図7Bは、ロボットハンドラ700aの他の実施形態の斜視図である。図2Aおよび図2Bに示すロボットハンドラと同様に、ロボットハンドラ220はモータアセンブリ731,740および750と、対応する線形スクリュレールアセンブリを有しており、電気機械式グリッパ220を三次元方向に移動させる。
【0063】
電気機械式グリッパ220は、第1および第2のグリッパ素子224a,224bを駆動するモータおよび線形スクリュレールアセンブリ721を有して、スプレー装置、収集容器、または廃棄物収集器を把持もしくは解放する。各グリッパ素子224a,224bは、それぞれ、可動ジョー226a,226b、固定ジョー228a,228b、ばね729a,729b、磁気センサ724a,724b、および磁石726a,726bを有する。上側ジョー226a,226bおよびばね729a,729bはともに、それぞれグリッパ素子224a,224bに移動可能に連結されて、垂直方向のコンプライアンス(やわさ)を与える。このコンプライアンスを与える例として、上側ジョー226a,226bによって保持されたノズル先端軽打器が、未知の高さのノズル先端を有するスプレー装置を軽打するのに用いられる場合である。
【0064】
磁気センサ724a,724bがそれぞれグリッパ素子224a,224bに固着され、磁石726a,726bがそれぞれ上側ジョー226a,226bに取り付けられている。センサ724a,724bおよび対応する磁石726a,726bの位置関係が合っていない場合、磁気センサ724a,724bは、廃棄物収集器のような物体がスプレー装置のような別の物体に接触したことを、システムコンピュータ(例えば、システムコンピュータ114)に示す。磁気センサ724a,724bはまた、上側ジョー226a,226bのグリッパ素子224a,224bに対する位置についての情報を提供する。
【0065】
図2Aに示すように、グリッパ素子224a,224bは、回転モータ221によって駆動される線形スクリュレールアセンブリ222に連結する。線形スクリュレールアセンブリ222は、左ねじ部分および右ねじ部分を有する線形スクリューを有する。このような線形スクリューは、回転モータ221が線形スクリュレールアセンブリ222を駆動すると、グリッパ素子224a,224bを同期して相反する方向に移動させる。これに対して、従来の空気式グリッパは、完全に開いているか、完全に閉じているかの2つの位置のみを想定している。一方、この電気機械式グリッパ220は、あらゆる範囲の動きに対応し、その範囲は線形スクリューの全長にのみによって限定される。その結果、電気機械式グリッパは、種々の形状と大きさのスプレー装置、収集容器、または廃棄物収集器を扱う。
【0066】
上側ジョー226a,226bはV字溝を有しているため、電気機械式グリッパは種々の物体を堅固かつ確実に把持できる。本実施形態では、ジョー226a,226bおよび228a,228bは、所定角度のV字形状を有し、スプレー装置および他の物体を把持する電気機械式グリッパの機能をさらに向上させるよう設計されている。
【0067】
図8は、電気機械式グリッパの可動ジョーのセンサからのフィードバックに基づいて、ロボットハンドラを制御する処理800の一例を示すフローチャートである。開始(ステップ801)の後、ステップ802でシステムコンピュータ114はホルダトレーの収集器にロボットハンドラを移動させるコマンドを発行する。ステップ804で、ロボットハンドラは、ロボットハンドラジョーの可動部分で収集器を持ち上げ、ステップ806で、スプレー装置が予め固定されたアクチュエータまで収集器を移動させる。次に、ステップ808でロボットハンドラは収集器の中心線とスプレー装置のノズル先端の位置合わせを行う。ステップ810で、ロボットハンドラは収集器をスプレー装置のノズル先端の方に移動させる。ステップ812,813でジョーセンサーが、ジョーが所定距離移動したことを検知すると、ステップ814でロボットハンドラの動きは停止する。収集器は所定位置に存在し、スプレー装置は、ステップ816で作動されて、処理800はステップ817で終了する。
【0068】
図9は、一実施形態によるノズル先端軽打器318の一例を示す断面図である。事前の分析で、機械的な軽打動作のみが、揺変性の鼻スプレー製剤、特に固着剤を含有する製剤に効果的に作用することがわかっている。簡単な実験によって、空気の吹出しまたは空気の吸込みの手法を使うことによってのみ、粘性が低下して製剤が膜状に薄くなり、スプレー装置の全質量をほぼ一定に保つ(つまり、残留物が液滴状ではなく薄い膜状にノズル先端に残る)ことがわかっている。ノズル先端軽打器318は、基部910、ハンドル912、軽打媒体916および柔軟なバックグラウンド媒体914(例えば、スポンジ状の媒体)を有する。柔軟なバックグラウンド媒体914は、既知の手法で(たとえば、接着剤を用いることで)基部910と軽打媒体916に付着する。一実施形態では、スプレー装置の製剤が軽打媒体916に分散しないように、軽打媒体916は閉塞セル媒体である。閉塞セル軽打媒体916であるため、ロボットハンドラは、軽打媒体916の別の箇所を用いて軽打媒体916を繰り返し使用することができる。スポンジ状のバックグラウンド媒体914は軽打媒体916の洗浄機能を向上させることがわかっている。
【0069】
ノズル先端軽打器318の特長は、スプレー装置の性能に影響を与えず、与えたとしても噴霧のショット重量が変わらないことである。ノズル先端軽打器は、最も効率が悪い場合は各ショット後に、一方最低限にとどめる場合には一連の作動後に、ノズル先端領域を洗浄するのに用いられる。
【0070】
図10および図11は、図9のノズル先端軽打器の一実施形態の使用法を示し、スプレーポンプ装置の試験を行う処理1000,1100の一例を示すフローチャートである。処理1000の開始(ステップ1001)の後、システムコンピュータ114は、ステップ1002でアクチュエータにコマンドを発行して、スプレー装置を作動する。ステップ1004で、ロボットハンドラは、先端軽打器保持領域まで移動するよう命令され、ステップ1006で、先端軽打器を持ち上げるように命令される。ステップ1008では、ロボットハンドラは、先端軽打器をスプレー装置上方のアクチュエータまで移動させ、ステップ1010において先端軽打器でスプレー装置ノズル先端を軽打する。ロボットハンドラは、ステップ1012で先端軽打器を先端軽打器保持領域まで移動し、ステップ1014で先端軽打器を解放する。終了(ステップ1019)の前に、ステップ1016で先端軽打器センサ319(図3)が先端軽打器の存在を検出した場合、センサは、先端軽打器が先端軽打器保持領域に適切に配置されていることをシステムコンピュータに信号を送って知らせる。先端軽打器の存在を検出しない場合、ステップ1017に進み、ステップ1012でロボットハンドラは先端軽打器を先端軽打器保持領域まで移動し、ステップ1014で先端軽打器を解放する。この処理は、ステップ1016で先端軽打器センサ319が先端軽打器の存在を検出するまで行われる。
【0071】
処理1100が開始(ステップ1101)した後、ステップ1102でアクチュエータがスプレー装置を収集容器のような収集器内に動かす。ステップ1104から1110については、ステップ1104でロボットハンドラがアクチュエータまで移動し、ステップ1106で収集器を持ち上げ、ステップ1108で収集器を装置ホルダトレーの適切な位置に載置して、ステップ1110で収集器を解放する。ステップ1112において、ロボットハンドラは先端軽打器保持領域まで移動し、ステップ1114において、ロボットハンドラの可動ジョーで先端軽打器を持ち上げる。
【0072】
ステップ1116において、ロボットハンドラは先端軽打器をアクチュエータまで移動させ、先端軽打器の領域(例えば、未使用領域)がスプレー装置のノズル先端の位置と合うように先端軽打器を位置決めする。ステップ1118において、ロボットハンドラは先端軽打器をスプレー装置のノズル先端に向けて移動させる。ステップ1120,1121でロボットハンドラが可動ジョーの動きを検出すると、先端軽打器がスプレー装置のノズル先端と接触したことを通知して、ステップ1122でロボットハンドラは先端軽打器を装置のノズル先端から遠ざけるように移動させる。可動ジョーの動きを検出しない場合、ロボットハンドラは先端軽打器を装置のノズル先端から遠ざけずに、先端軽打器が所与の期間、スプレー装置のノズル先端と接触を続けるようにロボットハンドラを停止させる。終了(ステップ1127)の前に、ステップ1124でロボットハンドラは先端軽打器を先端軽打器保持領域まで移動させて、ステップ1126で先端軽打器を解放する。
【0073】
図12Aは、一実施形態による満載されたホルダトレー210の斜視図である。本実施形態では、2列1210a,1210bの横方向作動スプレー装置1211および対応するスプレー装置ホルダ1212、廃棄物収集器213、および収集容器215が存在している。1210a,1210bの各列には、5個のスプレー装置1211、5個の廃棄物収集器213、および10個の収集容器215が存在する。ほとんどの製造業者とUSPは、10個のスプレー装置サンプルが1バッチの動作の代表的なものであると考えているため、10個のスプレー装置サンプルは、投与含量均一性試験についてのシステムの本実施形態の形態要素である。事前の設計分析で、これよりも多くの装置を扱おうと試みたが、それは一般的な薬剤生産環境において費用対効果の観点から妥当ではないことわかった。しかし、他の実施形態においては、より多くのスプレー装置をポンプ送達試験で扱う。
【0074】
ある試算によると、現在市場に出ている鼻スプレー製品の最大の流動容量は約40mLである。そのため、システムの本実施形態では、投与含量均一性試験における一回の動作で最大400mL(40mL×10個のスプレー装置1211)の流体と、ポンプ送達試験において800mL(40mL×20個のスプレー装置1211)を扱うことを可能とする。システムはまた、同一または異なるバッチからの同一スプレー装置を扱うこともできる。
【0075】
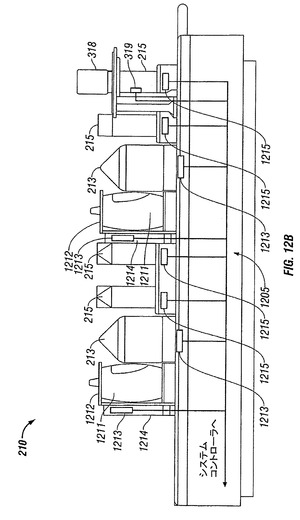
図12Bは、図12Aのホルダトレーの側面図であり、一実施形態によるホルダトレーセンサシステム1205を示す。ホルダトレーセンサシステム1205は、センサ1213,1213,1215を有し、センサ1213,1213,1215は、それぞれの廃棄物収集器213、スプレー装置1211、および収集容器215に対応している。スプレー装置1211のセンサ1213は、スプレー装置受入部1214内に取り付けられて、スプレー装置ホルダ1212の存在を感知するように構成されている。センサ1213,1213,1215は、光電子センサ、磁気センサ、機械式のセンサなどであり、対応するスプレー装置1211、廃棄物収集器213、または収集容器215の有無を感知する。センサ1213,1213,1215は、スプレー装置1211、廃棄物収集器213、または収集容器215の有無を示すセンサ信号をシステムコンピュータに送信する。システムコンピュータは、いずれの要素(例えば、スプレー装置、廃棄物収集器、または収集容器)が装着される必要があり、どこに装着されるべきであるかについてユーザに視覚的に示す。
【0076】
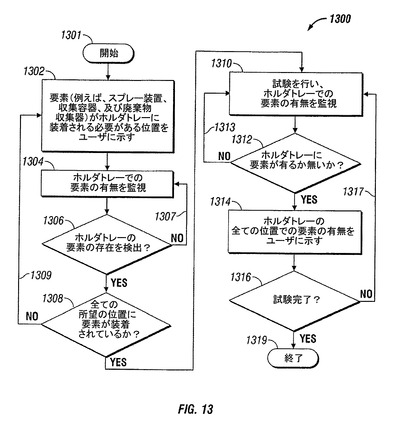
図13は、図12Bのホルダトレーセンサシステム1205の使用法を示す処理1300の一例を示すフローチャートである。開始(ステップ1301)の後、システムコンピュータは、ステップ1302において、要素(例えば、スプレー装置、収集容器、および廃棄物収集器)がホルダトレーに装着される必要がある位置を入出力装置を介してユーザに示す。ステップ1304でセンサはホルダトレーにおける要素の存在を監視する。1つのセンサまたは一群のセンサが、ステップ1306においてホルダトレーでの要素の存在を検出した場合、ステップ1308でシステムコンピュータはすべての所望の位置に要素が装着されているか否かを判定する。要素がすべての所望の位置に装着されていないと判定された場合、ステップ1309に進み、システムコンピュータは、ステップ1302で要素がホルダトレーに装着される必要のある所望の位置をユーザに示す。要素がすべての所望の位置に装着されていると判定される場合、ステップ1310で、システムコンピュータは試験の実行に進み、ホルダトレーに要素が存在するかしないかを監視する。
【0077】
ホルダトレーセンサが、ステップ1312でホルダトレーにおける要素の有無を検出する場合、ステップ1314でシステムコンピュータはホルダトレーのすべての位置での要素の有無をユーザに示す。試験がステップ1316で完了するまで、ステップ1317に示すように、ステップ1310でシステムコンピュータがホルダトレーにおける要素の有無の監視を続ける。ステップ1319で、処理1300は終了する。
【0078】
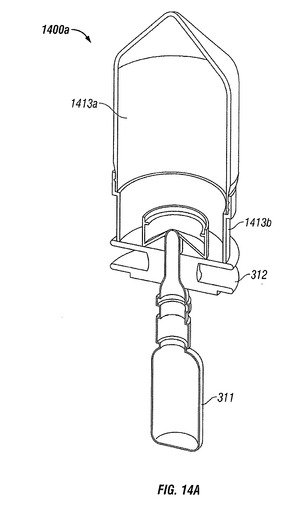
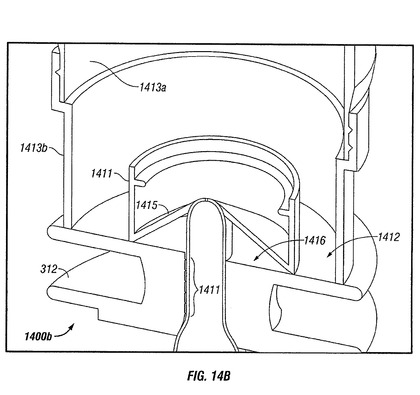
図14Aおよび図14Bは、一実施形態によるスプレーポンプ収集アセンブリ1400a,1400bの斜視断面図である。スプレーポンプ収集アセンブリ1400a,1400bは、スプレーポンプボトル311、コレット312、収集容器基部1413b、および収集容器上部1413aを有する。収集容器上部1413aおよび収集容器基部1413bはスレッドを有し、このスレッドが、収集容器上部1413aと収集容器基部1413bとをねじ留めする。
【0079】
収集容器基部1413bは、第1の内壁1411を有して第1の収集領域1412を形成し、第2の内壁1415を有して、第1の内壁1411と第2の内壁1415の間に第2の収集領域1416を形成する。第2の内壁1415と第2の収集領域1416は、収集容器基部1413bに挿入される「プラグ」を構成する。第1の収集領域1412はスプレーボトル311から排出される製剤の大部分を収集する。第1の収集領域1412で収集されない残りの製剤は、第2の収集領域1416で収集される。
【0080】
スプレーポンプ収集アセンブリ1400a,1400bはコレット312を有する。コレット312は、スレッド1411を有する開口を備える。コレット312の開口は、コレット312がスプレーボトルのノズル先端に螺装されるときに開口のスレッド1411がスプレーボトルのノズル先端を把持するように、先細りになっている。スプレーボトルノズル先端の基部をコレット312の開口のスレッド1411が把持しているため、スプレーボトル311の噴霧機能に影響を与えない。コレット312は、例えば、ロボットハンドラまたはアクチュエータによって、スプレーボトル311の取り扱いを容易にする。
【0081】
図15は、DCU、ポンプ送達、スプレーパターン、および液滴径分布試験のための自動スプレーポンプ試験システム1500の一実施形態を示す正面図である。自動スプレーポンプ試験システム1500は、DCUおよびポンプ送達試験領域112に加えて、統合された光学測定3次元領域1520および光学測定装置のための拡張3次元領域1510を有する。
【0082】
図16Aは、スプレーパターンおよび液滴径分布試験のための光学測定3次元領域および光学装置拡張3次元領域1600の斜視図である。図16Aに示すように、光学測定3次元領域1520は、スプレーパターンおよび液滴径分布測定を行うための隔離された筐体1621を有する。筐体1621は、スプレーパターンおよび液滴径分布測定において、スプレーボトルから排出される製剤を収容する手段となる。液滴径分布測定については、光学測定3次元領域はレーザ1612を有し、拡張3次元領域1510は対応する受光部1611を有する。アクチュエータ250は、昇降アセンブリ1627に連結され、この昇降アセンブリ1627は、スプレーパターンおよび液滴径分布測定のために、DCUおよびポンプ送達試験領域112から筐体1621にスプレーボトル311を搬送する。昇降アセンブリ1627のおかげで、自動ノズル先端は光学軸の位置決めを行うことができる。この筐体によって、洗浄が容易になり、光学用のハードウェアが保護される。
【0083】
図16Bは、図16Aの光学測定3次元領域および光学装置拡張3次元領域1600の斜視図であり、スプレーパターン試験を示す。スプレーパターン試験のために、レーザ1623は光シート1624を射出し、カメラ1625は、アクチュエータ250がスプレーボトル311を作動させると、カメラの視野1626内の画像を取り込む。
【0084】
図16Cは、図16Aの光学測定3次元領域および光学装置拡張3次元領域1600の斜視図であり、液滴径分布試験を示す。昇降アセンブリ1627はスプレーボトル311のノズル先端を位置決めして、ノズル先端と、レーザ1612から射出されて受光部1611で受光されるレーザビーム1513の光学軸との距離を所望のものとする。
【0085】
図17は、図15および図16Aから図16Cの自動スプレーポンプ試験システムを用いてスプレーポンプ装置の試験を行う処理1700を示すフローチャートである。開始(ステップ1701)の後、ロボットハンドラはステップ1702でホルダトレーの所望のスプレー装置まで移動して、ステップ1704でスプレー装置を持ち上げる。ステップ1706において、ロボットハンドラはスプレー装置をアクチュエータ内に位置決めして固定し、ステップ1708でスプレー装置を解放する。ステップ1710で、投与含量均一性(DCU)およびポンプ送達試験が行われる。DCUおよびポンプ送達試験が完了すると、アクチュエータがスプレー装置とともに、ステップ1712で光学測定3次元領域まで移動され、ステップ1714で、スプレーパターンおよび液滴径分布測定等の光学測定が行われる。
【0086】
ステップ1714で光学測定が行われた後、アクチュエータは、スプレー装置とともにステップ1716でDCUおよびポンプ送達試験領域まで戻る。終了(ステップ1725)の前に、ステップ1718でロボットハンドラはアクチュエータまで移動して、ステップ1720でスプレー装置を持ち上げ、ステップ1722でスプレー装置をホルダトレーまで移動させて、ステップ1724でスプレー装置を解放する。
【0087】
本発明を、例示的実施形態を参照して詳細に図示して説明してきたが、形態および細部における様々な変更を、添付の特許請求の範囲に包含される本発明の範囲から逸脱することなく実行可能であることは当業者には理解されるであろう。
【0088】
上述の、図4Aから4C、6、8、10,11、13、および17のフローチャートはいずれも、ハードウェア、ファームウェアまたはソフトウェアで実現できることは言うまでもない。ソフトウェアで実現される場合、ソフトウェアは、任意の形態の機械読取り可能な媒体(例えば、CD−ROM)に記憶され、少なくとも1つの汎用プロセッサまたはアプリケーション固有のプロセッサによってロードされ実行されることができる、任意の適切な形式のソフトウェアである。
【符号の説明】
【0089】
114 システムコンピュータ
210 トレー
211 スプレーポンプアセンブリ
213,215 収集器
220 ロボットハンドラ
250 アクチュエータ
255 計重装置
【関連出願】
【0001】
本願は、2006年11月10日出願の米国仮特許出願第60/858,257号の利益を主張する。上記の出願の全内容は参照により本願明細書に引用したものとする。
【技術分野】
【0002】
本発明は、自動鼻スプレーポンプを試験する装置に関する。
【背景技術】
【0003】
米国食品医薬品局(FDA)は、定量式スプレーポンプを用いた局部的に作用する鼻スプレーについて、新薬承認申請(NDA)または略式新薬承認申請(ANDA)に準じて、製品品質の研究を行って、バイオアベイラビリティ(BA)を測定し生物学的同等性(BE)を確立することを計画している申請者(例えば、製薬会社)のための一連の業界ガイドラインを策定している。これらのガイドラインでは、処方箋を必要とするコルチコステロイド、抗ヒスタミン薬、および抗コリン薬製品、市販の(OTC)の肥満細胞安定剤クロモグリク酸ナトリウムのBAおよびBEの研究を特に推奨している。推奨しているのは、表1に示す7種の試験とそれらの測定対象と使用段階などであり、それらはすべて実証されている分析方法を用いて行われ、製品の生体外パフォーマンスの特徴を示す。
【0004】
【表1】
【0005】
使用段階の最初(BOL)を、ラベル表示された回数分のプライミング作動を行った後の1回目の操作と定める。使用段階の最後(EOL)を、ラベル表示された、公言している操作回数に対応する操作と定める。
【0006】
表1に挙げられた試験を行う場合、自動作動システムを用いて、オペレータによる薬品送出におけるばらつきを減少させて、製品間の潜在的な差異を検出する感度を上げることを、米国食品医薬品局は推奨している。米国食品医薬品局はまた、力、速度、加速度、ストロークの長さ、および他の関連パラメータを自動作動システムに設定することを推奨している。米国食品医薬品局はさらに、自動作動システムで用いられる設定を適切に選択することを推奨しており、これにより、慣れた患者は製品を適切に使用できる。設定は、ポンプの供給業者から入手可能であるか、または関連パラメータを変化させて手動による操作で生体外パフォーマンスをシミュレートするという探索的研究を行うことによって得ることができる。
【0007】
表1の試験1および7に関して、米国食品医薬品局は特に、器具から送達される(例えば、射出されるまたはアクチュエータから外に出される)薬品質量を判定することを推奨している。これらの米国食品医薬品局の推奨とともに、米国薬局方(USP)は、自動作動システムを有する鼻スプレー製品の送達量の均一性の試験を行うために用いるべき特定の試験方法を提唱している。米国食品医薬品局および米国薬局方は、試験対象の鼻スプレー製品は使用のためのラベル表示および指示の通りに準備されるべきであると推奨しており、これは製品の揺動およびプライミングを行うことを意味しているに他ならない。米国食品医薬品局の勧告にも米国薬局方の勧告にも直接述べられていないが、送達ショット重量(例えば、送達噴霧の重量)を測定することで、ポンプの送達性能の主指標が得られ、また、送達投与の均一性の補助的測定値が得られることが多い。全般的に、これらの勧告は、鼻スプレーの試験に携わる機関に多くの難題を投げかけており、例えば以下に挙げる点が含まれる。
1.生体外での試験を行うために用いられる自動作動システムのための適切な設定をいかに判定するか、
2.生体外での試験を実際に達成できるように、製品に用いられるラベル表示の指示(ラベル表示は(a)揺動の指示、(b)プライミングおよび再プライミングの指示、(c)容器の定格投与数、を含む)をいかに展開させるか、
3.試験データを収集および分析して高い製品品質を保証するのに用いられる試験方法をいかに展開および有効にするか、
4.試験方法を実行して、その結果を記憶するのに用いられるシステムをいかに有効にするか、
5.米国での販売に備えて最初の承認または継続承認を製品が取得するのに必要な時間および資金を最小限に抑えて、上述の法的な勧告を満たすようにこれらの作業をいかに統合するか、などがある。
【0008】
スプレー含量均一性の試験を行うために現在容認されている方法では、作動、サンプル計重、揺動、データ収集、およびデータ分析は主に手動操作に頼っている。ある程度電子的に記録を残しながら自動作動と手動によるサンプルの収集を組み合わせて用いている企業もあるが、紙に記録する完全な手作業による方法を用いている企業もある。
【発明の概要】
【発明が解決しようとする課題】
【0009】
用いられる方法に関わりなく、作動、サンプル収集、および/または計重における手動操作は、人的エラー、生産性の非効率化、オペレータに繰り返しかかるストレス、データの完全性の低下などの問題を伴うことがわかっている。さらに、今日の薬学環境においては、紙に記録するということは、実質的に米国連邦規則第21条第11章(電子記録および署名に関する要件)の遵守に異議を申し立てていることとなる。これらの問題が、生産のボトルネックとなり、かつデータに矛盾がある場合に現行の医薬品および医薬部外品の製造管理および品質管理の基準(cGMP)の要件によりさらなる試験を生じさせる。生産のボトルネックも、さらなる試験も、製造における採算性に深刻な影響を与える。しかし、手動で行われることが最良である処理もある。例えば、収集された投与サンプルを自動サンプル調合システムに移動させる作業を手動とすることは、全面的に受け入れられる。その理由は、サンプル調合システムは、別々の研究室で共有されるものだからである。
【課題を解決するための手段】
【0010】
一実施形態によれば、スプレーポンプアセンブリの試験を行う自動システムは、ロボットハンドラと、複数のスプレーポンプアセンブリおよび複数の収集器を保持するトレーと、スプレーポンプアセンブリのアクチュエータと、天秤のような計重装置とを有する。ロボットハンドラは、スプレーポンプアセンブリおよび収集器を、トレー、スプレーポンプアセンブリのアクチュエータ、および天秤の間で搬送し、スプレーポンプアセンブリの自動試験を容易にする。前記試験には、ショット重量の実施および噴霧の含量均一性試験(スプレー含量均一性試験)が含まれる。トレーは、各スプレーポンプアセンブリおよび収集器のセンサを有し、各スプレーポンプアセンブリおよび収集器の存在を感知する。システムコンピュータは、センサ情報を用いてユーザがトレーに載置するのを助け、システムの適切な動作を保証する。
【0011】
一実施形態では、ロボットハンドラは電気機械式グリッパを有する。電気機械式グリッパは、回転モータと、左ねじおよび右ねじの線形スクリューと、第1および第2のグリッパ素子とを有する。第1および第2のグリッパ素子は、それぞれ、線形スクリューの左ねじ部分および右ねじ部に移動可能に連結されている。そして、線形スクリューは回転モータに連結されている。システムコントローラが回転モータに制御信号を送信すると、回転モータは線形スクリュレールアセンブリを駆動して、第1および第2のグリッパ素子を反対の直線方向に移動させる。
【0012】
第1および第2のグリッパ素子はジョーを有し、両グリッパ素子を近づけるように駆動される場合は物体(例えば、スプレー装置アセンブリ)を把持し、両グリッパ素子が離れるよう駆動される場合は物体を解放する。両グリッパ素子は、可動ジョーとセンサとを有し、ジョーの動きを感知する。例えば、ロボットハンドラがジョーによって把持された物体を静止物体に向かって移動させると、そのジョーによって把持された物体が静止物体に接触した後ロボットハンドラは同一方向に移動し続ける。
【0013】
スプレーポンプアセンブリはスプレーポンプクランプを有する。このスプレーポンプクランプがあれば、ロボットハンドラまたはアクチュエータはスプレーポンプをより容易に扱うことができる。クランプは、ねじを切った開口を有する。この開口は、クランプの中心軸のまわりの中央位置に設けられ、クランプの底部側に第1の直径を有し、クランプの上端側に第2の直径を有する。クランプの開口にノズル先端を挿入すると同時にクランプがノズル先端に固定されるまでクランプを回転させることで、クランプはスプレーポンプのノズル先端に固定される。
【0014】
システムは、さらに、ノズル先端軽打器を有する。ロボットハンドラはこのノズル先端軽打器を用いてスプレーポンプのノズル先端の汚れをなくすように保つ。一実施形態では、ノズル先端軽打器は、基部、吸収パッド、および可撓性パッドを有する。可撓性パッドは基部に取り付けられ、吸収パッドは可撓性パッドに取り付けられる。可撓性パッドは、吸収パッドの洗浄機能を向上させる。
【0015】
スプレーポンプアセンブリの試験を行う自動システムの別の実施形態では、システムは、第1試験装置を有する第1試験領域(第1試験区域)と、第2試験装置を有する第2試験領域(第2試験区域)と、第1試験領域と第2試験領域とをつなぐ昇降アセンブリと、昇降アセンブリに取り付けられたスプレーポンプアセンブリアクチュエータとを有する。昇降アセンブリは、アクチュエータを第1試験領域および第2試験領域の間で移動させて、スプレーポンプアセンブリの多数の試験を自動的に行う。システムの第1試験領域では、スプレーポンプアセンブリを取り扱って搬送するロボットハンドラを用いる。一つの例示的な実施形態では、第1試験装置は分析天秤であり、第2試験装置は、(i)スプレーパターンを測定するように構成されたカメラおよび第1レーザ、または(ii)レーザ回折を通して液滴径分布を測定するように構成された第2レーザと受光部、または(i)と(ii)の両方を備える。
【0016】
上記内容は、添付図面に示される本発明の例示的実施形態についての以下のさらに具体的な説明から明らかになるであろう。図面において、同一の参照符号は、異なる図の全てを通して同一部分を指す。図面は必ずしも縮尺通りでなく、本発明の実施形態を説明することに重点が置かれている。
【図面の簡単な説明】
【0017】
【図1】一実施形態による投与含量均一性(DCU)およびポンプ送達試験のための自動スプレーポンプ試験システムの正面図である。
【図2A】図1の試験システムの試験領域の正面図である。
【図2B】図2Aの試験領域の上面図である。
【図2C】自動スプレーポンプ試験システムのブロック図であって、システム要素の例を示す図である。
【図3】一実施形態によるアクチュエータ、天秤および先端軽打器アセンブリを含む試験領域を示す斜視図である。
【図4A】スプレーポンプ装置の試験を行う処理の一例を示すフローチャートである。
【図4B】スプレーポンプ装置の試験を行う処理の一例を示すフローチャートである。
【図4C】スプレーポンプ装置の試験を行う処理の一例を示すフローチャートである。
【図5A】一実施形態によるアクチュエータの斜視図である。
【図5B】一実施形態によるアクチュエータの斜視図である。
【図5C】一実施形態によるアクチュエータの斜視図である。
【図6】アクチュエータ内にスプレーポンプ装置を固着する処理の一例を示すフローチャートである。
【図7A】一実施形態によるロボット装置の斜視図である。
【図7B】一実施形態によるロボット装置の斜視図である。
【図8】電気機械式グリッパの可動ジョーのセンサからのフィードバックに基づいて、ロボットハンドラを制御する処理の一例を示すフローチャートである。
【図9】一実施形態によるノズル先端軽打器の一例を示す断面図である。
【図10】ノズル先端軽打器の使用法を示す図であって、スプレーポンプ装置の試験を行う処理の一例を示すフローチャートである。
【図11】ノズル先端軽打器の使用法を示す図であって、スプレーポンプ装置の試験を行う処理の一例を示すフローチャートである。
【図12A】一実施形態による、満載されたホルダトレーの斜視図である。
【図12B】図12Aのホルダトレーの側面図であって、一実施形態によるホルダトレーセンサシステムを示す図である。
【図13】図12Bのホルダトレーセンサシステムの使用を示す処理の一例を示すフローチャートである。
【図14A】一実施形態によるスプレーポンプ収集アセンブリの斜視断面図である。
【図14B】一実施形態によるスプレーポンプ収集アセンブリの斜視断面図である。
【図15】DCU,ポンプ送達、スプレーパターン、および液滴径分布試験のための自動スプレーポンプ試験システムの一実施形態の正面図である。
【図16A】光学測定3次元領域と、光学装置スプレーパターンおよび液滴径分布試験アセンブリの斜視図である。
【図16B】図16Aの拡張3次元領域の斜視図であり、スプレーパターン試験を示す図である。
【図16C】図16Aの拡張3次元領域の斜視図であり、液滴径分布試験を示す図である。
【図17】図15の自動スプレーポンプ試験システムを用いてスプレーポンプ装置の試験を行う処理のフローチャートである。
【発明を実施するための形態】
【0018】
本発明の例示的実施形態を以下に説明する。
【0019】
図1は、本発明の一実施形態による自動スプレーポンプ試験システム100の正面図である。この自動スプレーポンプ試験システムは、鼻スプレーポンプボトルのようなスプレーポンプすなわちエアロゾル装置の投与含量均一性(DCU)およびポンプ送達試験を高処理能力で自動的に行う。このシステム100はまた、自動的にプライミング(空気抜き)または再プライミングの試験を行い、ユーザが試みているスプレー製品についての種々の揺動方法を確認する。上述のように、スプレーポンプ装置の試験の手動による手法は、生産環境において、単調であり、時間を費やし、エラーを生じやすい。これに対して、自動スプレーポンプ試験システム100は、スプレーポンプすなわちエアロゾルの製剤の試験に携わる機関のための「認可までの時間」を大幅に短縮する。
【0020】
以下に詳しく説明するように、自動スプレーポンプ試験システム100の実施形態は、表2に述べる例示的な特徴および利点を包含する。
【0021】
【表2】
【0022】
表2に示すように、自動スプレーポンプ試験システム100の実施形態は、電気的およびコンピュータネットワークのインタフェースを有するスタンドアロンのシステムである。スタンドアロンのシステムは種々の利点を有する。例えば、迅速な計重を行う優れた振動絶縁性、設備および動作の管理の簡素化、作業スペースや可用性などの実験室によるばらつきがなく、空気の流れとガスの排出がないこと、実証済み技術の統合、などである。
【0023】
システム100は一体化されたスチールフレーム110を有し、システムの試験・測定装置のために構造を簡素化して振動から隔離する。システム100の構成要素は、試験領域112、システムコンピュータ114、システムコントローラ117、および入出力(I/O)装置116などである。入出力装置116をが、ユーザとシステム100とのインタフェースである。図1に示すように、試験領域112はユーザが利用しやすい高さに配置される(例えば、ユーザが座っている状態または立っている状態で容易に届く)。システムコンピュータ114およびシステムコントローラ117が統合されていることにより、ケーブルの配線、組み立て、および点検が簡素化されている。
【0024】
システム100の試験領域112はロボット装置ハンドラ120を有する。このロボット装置ハンドラ120は、試験領域112内で安全かつ確実に装置および収集器を取り扱って搬送する。本実施形態では、ロボット装置ハンドラ120は、インテリジェントな4軸に設計されており、種々の形状および大きさのスプレー装置を取り扱うことができる。本実施形態によれば、ロボット装置ハンドラ120は、スプレー装置の揺動、内部への作動であるノズル先端の軽打またはクリーニングを行うようにプログラムされている。ロボット装置ハンドラ120は高度に自動化された動作を行う。システム100は、装置およびサンプルの装填と取り外し、およびエラー状態(例えば、ネットワークが利用できない、装置または収集容器の取り扱いを誤る、空気の流れが悪い)を処理する以外は、ユーザの介入無しに動作する。また、システム100は、クリーニング以外の定常的なメンテナンスなしに、その日に薬剤生産装置を利用できる時間にわたって、連続して動作する。
【0025】
試験領域112は、スチールフレーム110およびスライド式ガラスアクセスドア118内に収容されている。スライド式ガラスアクセスドア118は、オペレータにとって、スプレー装置サンプルを装填したり取り出したりするための、試験領域112へのインタフェースとなる。スライド式ガラスアクセスドア118は、システムの試験・測定装置に静電荷が蓄積されることの影響を軽減し、オペレータの安全を適切に図るために強化ガラスパネルを有する。
【0026】
図2Aは図1の試験領域112の正面図であり、特にロボットハンドラ120を詳細に示す。試験領域112は、ロボットハンドラ120、ホルダトレー210、アクチュエータ250、および分析天秤255を搭載している。ロボットハンドラ120は、スプレー装置311(図3に関連して後述する)、収集容器215、および廃棄物収集器213を、ホルダトレー210、アクチュエータ250、および分析天秤255に搬送するように、またはこれらから搬送するように、命令される。以下にさらに詳細に説明すると、ロボットハンドラ120は、種々の形状と大きさのスプレー装置311、収集容器215、および廃棄物収集器213を取り扱うよう設計されている。例えば、ロボットハンドラ120は、プラスティックの試験管や遠心管などの市販の薬剤収集容器を扱うことができる。ロボットハンドラ120は、さらに、液剤が漏れたり汚染したりすることがないように、スプレー装置311、収集容器215、および廃棄物収集器213を搬送する設計およびプログラムとされている。例えば、一実施形態では、ロボットハンドラ120は、スプレー装置311、収集容器215、または廃棄物収集器213に蓋をするように設計およびプログラムされている。別の実施形態では、ロボットハンドラ120は、溶媒の添加、混合、濾過などの化学分析サンプルの調合を行うように設計およびプログラムされている。
【0027】
ロボットハンドラ120はスプレー装置または収集器を把持および解放する電気機械式グリッパ220を有することを特徴とする。この電気機械式グリッパは、可動部の数を最低限に抑えるように設計されている。電気機械式グリッパは2つの剛性のグリッパ素子224a,224b、すなわち可動ジョー226a,226bおよび固定ジョー228a,228bを有するグリッパアームを備える。グリッパ素子224a,224bは、低質量で高性能の線形スクリュレールアセンブリ222に移動可能に連結されている。線形スクリュレールアセンブリ222は、半分が左ねじ仕様で、残り半分が右ねじ仕様である、スクリュレールスピンドルを有する。線形スクリュレールアセンブリ222は、また、ドライブカプラ223を介して回転モータ221に接続される。ドライブカプラ223は、2つのプーリと1つのドライブベルトを有する。この構造において、回転モータは線形スクリュレールアセンブリ222を駆動して、グリッパ素子224a,224bを反対の方向に(回転モータ221が線形スクリュレールアセンブリ222を駆動する回転方向に応じて、お互いが近づく方向またはお互いから離れる方向に)移動させる。
【0028】
電気機械式グリッパ220は、垂直方向に延びる線形スクリュレールアセンブリ242およびz軸モータアセンブリ240に接続している。ロボットハンドラ120のz軸方向寸法は大きく設計されており、振動を引き起こさないようにしている。垂直(z軸)方向に延びた線形スクリュレールアセンブリ242はx軸スクリュレールアセンブリ232に移動可能に連結されている。z軸モータアセンブリ240の回転モータ241が、垂直方向に延びた線形スクリュレールアセンブリ242を駆動すると、垂直方向に延びた線形スクリュレールアセンブリ242は、電気機械式グリッパ220およびz軸モータアセンブリ240とともに、z軸に沿って、x軸線形スクリュレールアセンブリ232に対して(システム100に対して)移動する。別の回転モータ231がx軸線形スクリュアセンブリ232(図2Bも参照のこと)に接続されており、回転モータ231がx軸線形スクリュアセンブリ232を駆動すると、x軸線形スクリュアセンブリ232は、垂直方向に延びた線形スクリュレールアセンブリ242をz軸モータアセンブリ241および電気機械式グリッパ220とともに、x軸に沿って移動させる。
【0029】
x軸線形スクリュアセンブリ232は、第1のy軸線形スクリュアセンブリ236および第2のy軸線形スクリュアセンブリ238(図2B参照)に移動可能に連結されている。y軸モータ235は第1および第2のy軸線形スクリュアセンブリ236,238をy軸のドライブカプラ237(図2B参照)を介して駆動し、x軸線形スクリュアセンブリ232を、x軸線形スクリュアセンブリ232に取り付けられたアセンブリ220,240,242とともに、y軸に沿って移動させる。4軸(x,y,y’(電気機械式グリッパの線形スクリュレールアセンブリ222の軸),およびz)の動きで、ロボットハンドラは、試験領域112で、軌道上およびいわゆるジャーク振動などの種々の揺動機能を含む種々の機能を、さらに以下で述べるように果たすことができる。
【0030】
図2Bは、図2Aの試験領域112の上面図である。図2Bはx−y面すなわち水平面での動きを可能とするロボットハンドラ120の構成部品をより明確に示す。z軸モータアセンブリ240は、z軸線形スクリュアセンブリ242および電気機械式グリッパ220(図2A参照)とともに、x軸線形スクリュアセンブリ232に移動可能に連結している。そして、x軸線形スクリュアセンブリ232は、上述の第1および第2のy軸線形スクリュアセンブリ236,238に移動可能に連結している。y軸モータ235は、ドライブカプラ237を介して第1および第2のy軸線形スクリュアセンブリ236,238を駆動して、x軸線形スクリュアセンブリ232を、取り付けられたアセンブリ220,240,242と共にy軸に沿って移動させる。
【0031】
図2Bに示すように、ホルダトレー210は、10個のスプレー装置311(スプレー装置アセンブリ211として図示)、対応する10個の廃棄物収集器213,スプレー装置311毎に2つの収集容器215(合計20個の収集容器215)、およびノズル先端軽打器218を保持する。ホルダトレー210の本実施形態は、10個のスプレー装置についての投与含量均一性試験用に構成されており、あるスプレー装置に対応する2つの収集容器215の1うちの一方は使用開始時の計測のためのものであり、他方は使用終了時の測定のためのものである。ホルダトレー210はまた、ポンプ送達試験用にも構成されている。ポンプ送達試験では、収集容器215は、10個のさらなるスプレー装置311に置き換えられる。ホルダトレー210の他の実施形態では、種々の形状と大きさのスプレー装置、収集容器、および廃棄物収集器が保持される。
【0032】
図2Cは自動スプレーポンプ試験システム200のブロック図であり、システム要素およびシステム要素間の相互作用の例を示す。システムコンピュータ114はプログラム可能な方法を実行して、システムコントローラ117にコマンドを発行する。システムコンピュータ114はデータ収集のために承認された方法および開発中の(例えば、未承認の)方法を実行する。方法は適切な権限を持ったユーザによって承認されてもよい(開発段階から格上げされてもよい)。同様に、認可を受けたユーザは、方法を取り下げてもよい(例えば、その方法が実行されるのを防ぎ、この方法に関連した閲覧用のデータを全て残しておいてもよい)。この方法はユーザ定義可能なパラメータを含み、このパラメータは、作動プロファイル、揺動プロファイル、ならびにプライミング、廃棄および計重を含む作動イベント履歴全体に関するものである。100回分(100ショット)装置の1セットについての方法すなわち作動イベントプロファイルの例を表3に示す。
【0033】
【表3】
【0034】
システムコントローラ117は、システムコンピュータ114からのコマンドと、ロボットハンドラ120およびアクチュエータ250に一体的に組み込まれたセンサからのセンサ信号とに基づいて、ロボットハンドラ120およびアクチュエータ250の動きを制御するように制御信号を生成する。以下にさらに詳細に説明するように、ホルダトレー210はまた、各スプレー装置311、各廃棄物収集器213、各収集容器215、およびノズル先端軽打器218の有無を感知するセンサを有する。システムコンピュータ114は、分析天秤255からの測定データ、およびホルダトレー210、アクチュエータ250、またはロボットハンドラ120からのセンサ信号を受信、処理して、入出力(I/O)装置116を経由して表示するよう構成されている。例えば、システムコンピュータ114は、ホルダトレー210からのセンサ信号を処理し、いずれの要素(例えば、スプレー装置、廃棄物収集器、収集容器)を挿入するべきか、およびいずれの場所に挿入するべきかを、ユーザにI/O装置116を通して、視覚的にまたは他の方法で示す。
【0035】
上記表2に示したように、システム100はさらに、スプレーの製剤にユーザが長時間曝される悪影響を最低限に抑えるために、空気処理サブシステムを搭載する。例えば、空気処理サブシステムは、臭気の除去および/または抑制を実行する。空気処理サブシステムはまた、炭素を用いた濾過を行い、試験領域112内全体に十分空気が流れるようにする。ただし、空気処理サブシステムは、空気の流れが分析天秤255の性能を損なわないように設計されている。
【0036】
システムコンピュータ114は、測定データまたは他のシステム情報を記憶するためのデータベース115を有する。さらに、システムコンピュータ114は、米国連邦規則第21条第11章および他の社内規格(例えば、作動システムおよび方法)を遵守し、一貫したデータの記憶と検索フォーマットのために、セキュリティ保護されたデータベースソフトウェアプラットフォーム上で作動する。ソフトウェアプラットフォームは多数回の装置の作動すなわち「作動イベント」から得られる結果を処理することに重点が置かれる。作動イベントは、イベントが生じた装置(例えば、ロット番号または製造バッチIDなどの一意の識別番号)に直接結び付けられるとともに、誰がこの装置を作動させたか、いつ作動されたか、などの他の情報にも直接結び付けられる。さらに、装置の種類、ロット番号および装置識別子によって作動イベントをひとまとめにして、データ管理および分析を簡素化し、完全な試験作動履歴が作成される。
【0037】
システムソフトウェアは、中核となる記録管理主体サブシステムとして、関連データベース管理システムを用いる。このシステムソフトウェアでは、スプレー薬品試験(例えば、取得、処理、分析など)に関する機械読取りおよび人間読取りが可能なデータをユーザは管理することができ、これにより企業は以下のことが可能である。
・電子記録/電子署名(「ER/ES」)に関する米国連邦規則第21条第11章を遵守し(新しいユーザ)、または米国連邦規則第21条第11章の遵守を継続(既存のユーザ)する。
・機械読取り可能なデータを、ネットワーク、CD、またはDVDの記憶場所など、安全で、安定し、セキュリティ保護された媒体にアーカイブしてその媒体から取り出す。
・人間読取り可能なデータおよび機械読取り可能なデータとの間のトレーサビリティを確立する(例えば、全ての動作について、「誰、何、いつ、どこ、なぜ」)。ここで、データ、システム、および試験対象の製品に行われた全ての動作の履歴を確立することに特に重点を置いている。
【0038】
システムコンピュータ114および対応するシステムソフトウェアは、以下の例のエラーイベント(任意の他の重大なシステムイベントとともに)を適切に処理することができる。
1.ホルダトレー、天秤、グリッパ、または作動システムに装置または収集容器が無い
2.長時間のAC電力損失
3.適切に臭気を抑制するためのシステム内にわたる空気の流れが不十分である(警告イベントを生じさせなければならないが、システムの動作は停止すべきではない)
4.ロードセル較正エラー
5.ネットワークが利用できない(データベースがネットワークサーバに配置されている場合)
6.データベースが利用できない
7.緊急停止ボタンをユーザが押下
8.安全ドアがロックされていない
9.ユーザのログオン失敗
【0039】
システムエラーに応答して、システムコンピュータ114は自動的に追跡記録イベントを生成する。
【0040】
図3は、一実施形態によるアクチュエータ250、天秤255、およびノズル先端軽打器アセンブリ(218,318,319)を含む試験領域112を示す斜視図である。アクチュエータ250は、スプレー装置アセンブリ211を保持して作動させる。スプレー装置アセンブリ211はスプレーボトル311およびコレット312を有する。本実施形態では、動力カプラ(force coupler)251がスプレーボトル311を作動させるように、アクチュエータ250がコレット312を固定する。
【0041】
天秤255すなわち計重装置は、グラナイトテーブル355上に載置されている。そして、グラナイトテーブル355は、振動パッドを介してメタルフレーム110(図1)上に配置される。グラナイトテーブル355および振動バッドは、システムの他の部品(例えば、アクチュエータ250もしくはロボットハンドラ120)によって生じる振動、またはシステム100の外で発生した振動から、天秤255を隔離する。このようにして、天秤255は、USP<41>を実質的に遵守して、個々のショットを計重する。なお、USP<41>は、迅速で正確な計重を容易に行えるように、天秤の、安定して振動の少ない取り付けを要求している。天秤は、ガラスの筐体356を有し、この筐体356が、空気の流れおよび静電力が重量測定に影響を及ぼすことを防止する。
【0042】
システム100は、ユーザがプログラム可能な入力に従って、送達投与/ショットおよび/または計量投与/ショットの重量を、高い分解能(例えば、0.1mg)で、自動的に測定する。送達ショット/投与の重量(送達投与重量)は、適切な収集装置(例えば、廃棄物収集器または収集容器)の作動前と作動後の重量の差として計算される。すなわち、送達投与重量とは、収集によって得られた重量のことである。一方、計量投与重量は、スプレー装置の作動前と作動後の重量の差として計算される。すなわち、計量投与重量は、スプレー装置から排出された重量のことである。表4は、試験測定、測定モード、および計重する要素を示す。
【0043】
【表4】
【0044】
分析天秤255は、2つの内部較正用おもり(最低3ポイントの目盛補正を行う)を用いて自動的に較正される。この自動較正処理は、(例えば、日単位、週単位、月単位で)プログラムされ、システム100の通常の動作の一部として実行される。
【0045】
ノズル先端軽打器218は、ノズル先端軽打器218の存在を感知するセンサ319を有するノズル先端軽打器ホルダ318内に格納される。以下でさらに述べるように、ノズル先端軽打器218は、スプレー装置のノズル先端に、スプレーボトル311の性能に影響を及ぼす可能性のある残留物が残らないよう保つために用いられる。
【0046】
鼻スプレー製剤の多くは、揺変性懸濁液として調合され、機械式のポンプ装置を介して送達される。揺変性材料は、加わる剪断力または剪断速度が増加すると粘度が低下し、剪断負荷が取り除かれると時間とともにもとに戻る。(トマトケチャップが揺変性材料の良い例である、なぜなら、例えば、短いストローク、ジャーク作用揺動などの十分な剪断力がかからないと、トマトケチャップは容器から流れ出さないため)。鼻スプレー製剤の揺変性質は、放出される噴霧の性能に甚大な影響を与える可能性がある。そのため、作動およびその後のショット重量測定にスプレー装置を適切に準備するために、システムコンピュータ114の実施形態は、ロボットハンドラ120を用いて種々の揺動ルーチンを行うようにプログラムされる。
【0047】
あるスプレー装置では、揺動ルーチンは、垂直軸からスプレー装置を傾けてはならず、製剤を泡立たせてはならない。現行の実験室での慣行の調査および多くの鼻スプレー製剤の特性に基づくと、揺動ルーチンは以下の2つのモードのいずれかで動作する。
・垂直方向または斜め方向にして、大きな剪断揺動を生じさせる高加速度(ジャーク動作)モード、
・水平方向にして、緩やかな揺動を生じさせる平面(軌道作用)モード。
【0048】
両方のモードが、振幅、周波数、および継続時間を含む、揺動ルーチンの種々のパラメータを用いてプログラムされる。種々の実施形態において、揺動ルーチンは、試験実行前または試験実行中に行われる。
【0049】
図4Aは、送達測定モード(表4)を用いるスプレーポンプ装置の投与含量均一性試験を行う処理400の一例を示すフローチャートであり、選択的な揺動ルーチンを含む。開始(ステップ401)の後、システムコンピュータはロボットハンドラに(システムコントローラ経由で)コマンドを発行して、ロボットハンドラを装置保持領域(例えば、トレー210)の所望の装置まで移動させる。このステップでは、電気機械式グリッパを所望の装置の周りに配置する。システムコンピュータは、ロボットハンドラにコマンドを与え、ステップ404で装置を持ち上げる。システムコンピュータはロボットハンドラにコマンドを与え、ステップ406で装置を揺動するが、これはステップ408で装置をアクチュエータまで移動させる前、最中、または後に行われる。例えば、揺動コマンドは、水平方向の軌道上の経路または垂直方向の2点間の経路に沿って、装置を移動させるコマンドを含む。垂直方向または斜め方向の2点間の経路では、ロボットハンドラは、大きい加速度で垂直方向の経路に沿って装置を移動させて人が行うようなジャーク動作をシミュレートするように命令される。他の実施形態では、ロボットハンドラは回転揺動機能を持つように設計される。
【0050】
ステップ408で装置をアクチュエータまで移動させた後、システムコンピュータはロボットハンドラにコマンドを与え、ステップ410で装置をアクチュエータに固定し、ステップ412で装置を解放する。ステップ414から418において、システムコンピュータはロボットハンドラにコマンドを発行する。具体的には、ステップ414で電気機械式グリッパを収集容器保持領域の所望の収集容器まで移動させて、ステップ416で収集容器を持ち上げて、ステップ418で収集容器を天秤皿まで移動させる。ステップ420でロボットハンドラが収集容器を解放した後、ステップ422で天秤が収集容器を計重する。
【0051】
ステップ422で収集容器を計重した後、ステップ424でロボットハンドラは収集容器を持ち上げて、ステップ426でアクチュエータまで移動させる。ステップ428でロボットハンドラは収集容器をアクチュエータの装置のノズル先端上に位置決めして、収集容器をその位置で保持する。ステップ430で、システムコンピュータは、アクチュエータにコマンドを発行して、1回の投与に相当する回数だけ繰り返して装置を作動させる(例えば、多くの場合、1つの鼻孔につき1回の作動が相当するため、1回分の投与には2回の作動が必要である)。終了(ステップ437)の前に、ステップ432でロボットハンドラは収集容器を天秤皿まで移動させ、ステップ434で収集容器を解放して、ステップ436で天秤により計重される。
【0052】
処理400と同様の処理において、廃棄物収集器を収集容器の代わりに使用して送達測定モード(表4)を用いてスプレー装置のポンプ送達試験を行うことができる。表5はロボットハンドラ120の基本的な動作および機能の例を代表的に示す。「持ち上げる」と「解放する」という用語は、ロボットハンドラが出来うることを表し、ロボットハンドラが実際にそれをいかに行うかは表していないことは言うまでもない。
【0053】
処理400と同様の処理において、図4Bは、計量測定モード(表4)を用いてスプレー装置の投与含量均一性試験を行う処理400Aの一例を示すフローチャートである。処理400Aと同様の処理で、廃棄物収集器を収集容器の代わりに用いて、計量測定モード(表4)を用いてスプレー装置のポンプ送達試験を行う。処理400および400Aを組み合わせて、図4Cに示す新たな処理400Bとして、送達測定モードおよび計量測定モード(表4)を用いてスプレー装置の投与含量均一性を計測してもよい。処理400Bと同様の処理で、廃棄物収集器を収集容器の代わりに使用して、送達測定モードおよび計量測定モード(表4)を用いてスプレー装置のポンプ送達試験を行ってもよい。
【0054】
【表5】
【0055】
システム100の実施形態では、種々の作動測定モードを用いる。プライミングモードでは、システムコンピュータ114がアクチュエータから取得した、時間に対する力および位置のプロファイルをデータベース115に記録する。個々の容器の重さを差し引く(風袋の)送達ショット重量または計量ショット重量のモードでは、システム100は、各作動後に天秤255での風袋重量に基づいて各ショットを計重する。両方のモードでは、廃棄物収集器213は所与の試験方法に従って各ショットを収集する。送達ショット重量の測定では廃棄物収集器が計重され、計量ショット重量の測定では装置が計重される。投与含量均一性モードでは、システム100は、適切な大きさの収集容器(例えば、標準的な実験室用の収集管)に個々の投与を収集して、作動の前後での収集容器の重量差分を測定することでショットの重量を記録する(つまり、送達ショット重量法)。
【0056】
上述のシステム100は、ショット1回当たりで見た場合に、少なくとも熟練した実験室の技術者の能力に合わせることができる。システム100の試験稼働は、各作動後のノズル先端を軽打して天秤の風袋重量を測るものであり、このシステム100の試験稼働に基づいて、熟練した実験室の技術者は、平均して、メトラー・トレド(Mettler-Toledo)社製のAX−204 4交換機構の分析天秤を用いて25分間に約50の送達ショット重量の測定値(または平均して30秒ごとに1回の測定値)を収集できる。システム100の実施形態は、通常の操作状態では機械の不具合によってショット重量の読み間違いが起こらないように設計されている。
【0057】
図5A〜図5Cは、アクチュエータ250の一実施形態の斜視図であり、一実施形態による内部の構成部品を示す。アクチュエータ250の本実施形態は、回転モータ531、駆動伝達部材535(上記では「線形スクリュレールアセンブリ」と称している)、動力カプラ251、およびアクチュエータ電子回路540を備える。動力カプラ251は、アクチュエータ電子回路540と電気的に交信する動力トランスデューサを有してもよい。駆動カプラ533は2つのプーリと1つの駆動ベルトとを有する。プーリの一方は、モータースピンドルとともに回転するように、回転モータ531の回転駆動出力(つまり、モータスピンドル)に取り付けられている。他方のプーリは、スクリュレールスピンドル532とともに回転するように、線形スクリュレールアセンブリ535の線形スクリュレールスピンドル532に取り付けられている。駆動ベルトは、2つのプーリが同期回転するように、この2つのプーリを連結している。
【0058】
動力カプラ251は線形スクリュレールアセンブリ535に連結されており、これにより、モータ531がスクリュレールスピンドル532を駆動する。そして、このスクリュレールスピンドル532は動力カプラ251を駆動して、スプレーボトル311を作動する。アクチュエータ電子回路540は、コネクタ551,553,555を経由して、システムコンピュータ114およびシステムコントローラ117と交信する。例えば、アクチュエータ電子回路540は、システムコンピュータ114からコマンドを受信して、所定の力を印加することでスプレーボトル311を作動する。アクチュエータ250はまた、電源コネクタ557を有し、この電源コネクタ557を介して、アクチュエータ電子回路540、モータ531およびアクチュエータの他の部品に電力を供給する。
【0059】
アクチュエータ250は、コレット312を受け入れてコレット312をアクチュエータ250に固定する受入部511を有する。アクチュエータ250はさらに、コレット312の存在を感知するセンサ515を有する。センサは、光電子センサ、磁気センサ、またはコレット312の存在を検出する他のセンサである。センサ515は、センサ電子回路540を介して、システムコンピュータ114にセンサ信号を交信(伝達)できる。受入部511にはばねが装着されており、作動中はスプレー装置を所定位置に堅固に固定する。
【0060】
図5A〜図5Cに示すように、アクチュエータ250は、従来の鼻スプレーポンプの上向きの圧縮作動と、垂直方向のスプレー噴煙とを結び付けるように構成されている。アクチュエータ250の他の実施形態は、上述した実施形態と同一の内部部品(例えば、駆動機構)を有するが、スプレー装置の横または上向きの圧縮作動と、水平方向または垂直方向のスプレー噴煙とを結び付けるように構成されている。
【0061】
図6は、アクチュエータ内にスプレーポンプ装置を固定する処理600の一例を示すフローチャートである。開始(ステップ601)の後、ステップ602でロボットハンドラはアクチュエータ受入部の開口にコレットを配置して、ステップ604でアクチュエータ受入部内にコレットを嵌め込む。受入部センサがコレットの存在を検出すると、ステップ608でコレットの存在についての情報をアクチュエータ電子回路がシステムコンピュータに提供する。受入部センサがコレットの存在を検出しなければ、ステップ607に進み、ロボットハンドラはステップ604で再びコレットをアクチュエータ受入部に嵌め込むことを試みる。終了(ステップ611)の前に、ロボットハンドラは、例えば、DCU試験のために収集容器または廃棄物収集器を取得する処理に進むように、ステップ610でロボットハンドラはコレットを解放する。
【0062】
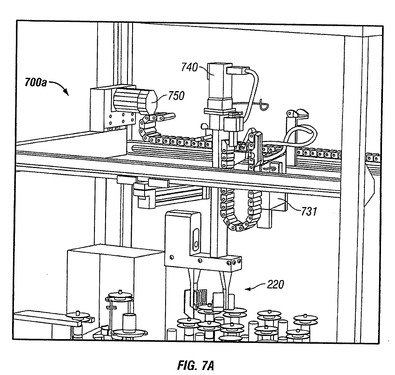
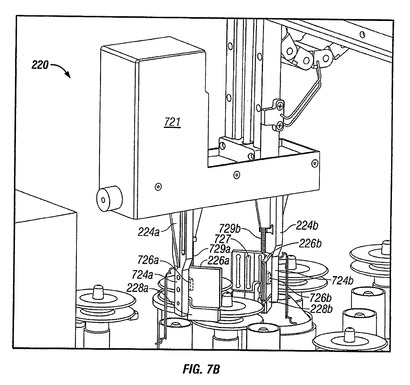
図7Aおよび図7Bは、ロボットハンドラ700aの他の実施形態の斜視図である。図2Aおよび図2Bに示すロボットハンドラと同様に、ロボットハンドラ220はモータアセンブリ731,740および750と、対応する線形スクリュレールアセンブリを有しており、電気機械式グリッパ220を三次元方向に移動させる。
【0063】
電気機械式グリッパ220は、第1および第2のグリッパ素子224a,224bを駆動するモータおよび線形スクリュレールアセンブリ721を有して、スプレー装置、収集容器、または廃棄物収集器を把持もしくは解放する。各グリッパ素子224a,224bは、それぞれ、可動ジョー226a,226b、固定ジョー228a,228b、ばね729a,729b、磁気センサ724a,724b、および磁石726a,726bを有する。上側ジョー226a,226bおよびばね729a,729bはともに、それぞれグリッパ素子224a,224bに移動可能に連結されて、垂直方向のコンプライアンス(やわさ)を与える。このコンプライアンスを与える例として、上側ジョー226a,226bによって保持されたノズル先端軽打器が、未知の高さのノズル先端を有するスプレー装置を軽打するのに用いられる場合である。
【0064】
磁気センサ724a,724bがそれぞれグリッパ素子224a,224bに固着され、磁石726a,726bがそれぞれ上側ジョー226a,226bに取り付けられている。センサ724a,724bおよび対応する磁石726a,726bの位置関係が合っていない場合、磁気センサ724a,724bは、廃棄物収集器のような物体がスプレー装置のような別の物体に接触したことを、システムコンピュータ(例えば、システムコンピュータ114)に示す。磁気センサ724a,724bはまた、上側ジョー226a,226bのグリッパ素子224a,224bに対する位置についての情報を提供する。
【0065】
図2Aに示すように、グリッパ素子224a,224bは、回転モータ221によって駆動される線形スクリュレールアセンブリ222に連結する。線形スクリュレールアセンブリ222は、左ねじ部分および右ねじ部分を有する線形スクリューを有する。このような線形スクリューは、回転モータ221が線形スクリュレールアセンブリ222を駆動すると、グリッパ素子224a,224bを同期して相反する方向に移動させる。これに対して、従来の空気式グリッパは、完全に開いているか、完全に閉じているかの2つの位置のみを想定している。一方、この電気機械式グリッパ220は、あらゆる範囲の動きに対応し、その範囲は線形スクリューの全長にのみによって限定される。その結果、電気機械式グリッパは、種々の形状と大きさのスプレー装置、収集容器、または廃棄物収集器を扱う。
【0066】
上側ジョー226a,226bはV字溝を有しているため、電気機械式グリッパは種々の物体を堅固かつ確実に把持できる。本実施形態では、ジョー226a,226bおよび228a,228bは、所定角度のV字形状を有し、スプレー装置および他の物体を把持する電気機械式グリッパの機能をさらに向上させるよう設計されている。
【0067】
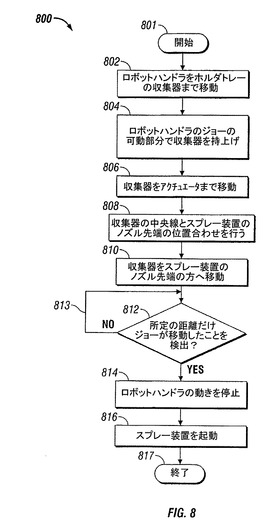
図8は、電気機械式グリッパの可動ジョーのセンサからのフィードバックに基づいて、ロボットハンドラを制御する処理800の一例を示すフローチャートである。開始(ステップ801)の後、ステップ802でシステムコンピュータ114はホルダトレーの収集器にロボットハンドラを移動させるコマンドを発行する。ステップ804で、ロボットハンドラは、ロボットハンドラジョーの可動部分で収集器を持ち上げ、ステップ806で、スプレー装置が予め固定されたアクチュエータまで収集器を移動させる。次に、ステップ808でロボットハンドラは収集器の中心線とスプレー装置のノズル先端の位置合わせを行う。ステップ810で、ロボットハンドラは収集器をスプレー装置のノズル先端の方に移動させる。ステップ812,813でジョーセンサーが、ジョーが所定距離移動したことを検知すると、ステップ814でロボットハンドラの動きは停止する。収集器は所定位置に存在し、スプレー装置は、ステップ816で作動されて、処理800はステップ817で終了する。
【0068】
図9は、一実施形態によるノズル先端軽打器318の一例を示す断面図である。事前の分析で、機械的な軽打動作のみが、揺変性の鼻スプレー製剤、特に固着剤を含有する製剤に効果的に作用することがわかっている。簡単な実験によって、空気の吹出しまたは空気の吸込みの手法を使うことによってのみ、粘性が低下して製剤が膜状に薄くなり、スプレー装置の全質量をほぼ一定に保つ(つまり、残留物が液滴状ではなく薄い膜状にノズル先端に残る)ことがわかっている。ノズル先端軽打器318は、基部910、ハンドル912、軽打媒体916および柔軟なバックグラウンド媒体914(例えば、スポンジ状の媒体)を有する。柔軟なバックグラウンド媒体914は、既知の手法で(たとえば、接着剤を用いることで)基部910と軽打媒体916に付着する。一実施形態では、スプレー装置の製剤が軽打媒体916に分散しないように、軽打媒体916は閉塞セル媒体である。閉塞セル軽打媒体916であるため、ロボットハンドラは、軽打媒体916の別の箇所を用いて軽打媒体916を繰り返し使用することができる。スポンジ状のバックグラウンド媒体914は軽打媒体916の洗浄機能を向上させることがわかっている。
【0069】
ノズル先端軽打器318の特長は、スプレー装置の性能に影響を与えず、与えたとしても噴霧のショット重量が変わらないことである。ノズル先端軽打器は、最も効率が悪い場合は各ショット後に、一方最低限にとどめる場合には一連の作動後に、ノズル先端領域を洗浄するのに用いられる。
【0070】
図10および図11は、図9のノズル先端軽打器の一実施形態の使用法を示し、スプレーポンプ装置の試験を行う処理1000,1100の一例を示すフローチャートである。処理1000の開始(ステップ1001)の後、システムコンピュータ114は、ステップ1002でアクチュエータにコマンドを発行して、スプレー装置を作動する。ステップ1004で、ロボットハンドラは、先端軽打器保持領域まで移動するよう命令され、ステップ1006で、先端軽打器を持ち上げるように命令される。ステップ1008では、ロボットハンドラは、先端軽打器をスプレー装置上方のアクチュエータまで移動させ、ステップ1010において先端軽打器でスプレー装置ノズル先端を軽打する。ロボットハンドラは、ステップ1012で先端軽打器を先端軽打器保持領域まで移動し、ステップ1014で先端軽打器を解放する。終了(ステップ1019)の前に、ステップ1016で先端軽打器センサ319(図3)が先端軽打器の存在を検出した場合、センサは、先端軽打器が先端軽打器保持領域に適切に配置されていることをシステムコンピュータに信号を送って知らせる。先端軽打器の存在を検出しない場合、ステップ1017に進み、ステップ1012でロボットハンドラは先端軽打器を先端軽打器保持領域まで移動し、ステップ1014で先端軽打器を解放する。この処理は、ステップ1016で先端軽打器センサ319が先端軽打器の存在を検出するまで行われる。
【0071】
処理1100が開始(ステップ1101)した後、ステップ1102でアクチュエータがスプレー装置を収集容器のような収集器内に動かす。ステップ1104から1110については、ステップ1104でロボットハンドラがアクチュエータまで移動し、ステップ1106で収集器を持ち上げ、ステップ1108で収集器を装置ホルダトレーの適切な位置に載置して、ステップ1110で収集器を解放する。ステップ1112において、ロボットハンドラは先端軽打器保持領域まで移動し、ステップ1114において、ロボットハンドラの可動ジョーで先端軽打器を持ち上げる。
【0072】
ステップ1116において、ロボットハンドラは先端軽打器をアクチュエータまで移動させ、先端軽打器の領域(例えば、未使用領域)がスプレー装置のノズル先端の位置と合うように先端軽打器を位置決めする。ステップ1118において、ロボットハンドラは先端軽打器をスプレー装置のノズル先端に向けて移動させる。ステップ1120,1121でロボットハンドラが可動ジョーの動きを検出すると、先端軽打器がスプレー装置のノズル先端と接触したことを通知して、ステップ1122でロボットハンドラは先端軽打器を装置のノズル先端から遠ざけるように移動させる。可動ジョーの動きを検出しない場合、ロボットハンドラは先端軽打器を装置のノズル先端から遠ざけずに、先端軽打器が所与の期間、スプレー装置のノズル先端と接触を続けるようにロボットハンドラを停止させる。終了(ステップ1127)の前に、ステップ1124でロボットハンドラは先端軽打器を先端軽打器保持領域まで移動させて、ステップ1126で先端軽打器を解放する。
【0073】
図12Aは、一実施形態による満載されたホルダトレー210の斜視図である。本実施形態では、2列1210a,1210bの横方向作動スプレー装置1211および対応するスプレー装置ホルダ1212、廃棄物収集器213、および収集容器215が存在している。1210a,1210bの各列には、5個のスプレー装置1211、5個の廃棄物収集器213、および10個の収集容器215が存在する。ほとんどの製造業者とUSPは、10個のスプレー装置サンプルが1バッチの動作の代表的なものであると考えているため、10個のスプレー装置サンプルは、投与含量均一性試験についてのシステムの本実施形態の形態要素である。事前の設計分析で、これよりも多くの装置を扱おうと試みたが、それは一般的な薬剤生産環境において費用対効果の観点から妥当ではないことわかった。しかし、他の実施形態においては、より多くのスプレー装置をポンプ送達試験で扱う。
【0074】
ある試算によると、現在市場に出ている鼻スプレー製品の最大の流動容量は約40mLである。そのため、システムの本実施形態では、投与含量均一性試験における一回の動作で最大400mL(40mL×10個のスプレー装置1211)の流体と、ポンプ送達試験において800mL(40mL×20個のスプレー装置1211)を扱うことを可能とする。システムはまた、同一または異なるバッチからの同一スプレー装置を扱うこともできる。
【0075】
図12Bは、図12Aのホルダトレーの側面図であり、一実施形態によるホルダトレーセンサシステム1205を示す。ホルダトレーセンサシステム1205は、センサ1213,1213,1215を有し、センサ1213,1213,1215は、それぞれの廃棄物収集器213、スプレー装置1211、および収集容器215に対応している。スプレー装置1211のセンサ1213は、スプレー装置受入部1214内に取り付けられて、スプレー装置ホルダ1212の存在を感知するように構成されている。センサ1213,1213,1215は、光電子センサ、磁気センサ、機械式のセンサなどであり、対応するスプレー装置1211、廃棄物収集器213、または収集容器215の有無を感知する。センサ1213,1213,1215は、スプレー装置1211、廃棄物収集器213、または収集容器215の有無を示すセンサ信号をシステムコンピュータに送信する。システムコンピュータは、いずれの要素(例えば、スプレー装置、廃棄物収集器、または収集容器)が装着される必要があり、どこに装着されるべきであるかについてユーザに視覚的に示す。
【0076】
図13は、図12Bのホルダトレーセンサシステム1205の使用法を示す処理1300の一例を示すフローチャートである。開始(ステップ1301)の後、システムコンピュータは、ステップ1302において、要素(例えば、スプレー装置、収集容器、および廃棄物収集器)がホルダトレーに装着される必要がある位置を入出力装置を介してユーザに示す。ステップ1304でセンサはホルダトレーにおける要素の存在を監視する。1つのセンサまたは一群のセンサが、ステップ1306においてホルダトレーでの要素の存在を検出した場合、ステップ1308でシステムコンピュータはすべての所望の位置に要素が装着されているか否かを判定する。要素がすべての所望の位置に装着されていないと判定された場合、ステップ1309に進み、システムコンピュータは、ステップ1302で要素がホルダトレーに装着される必要のある所望の位置をユーザに示す。要素がすべての所望の位置に装着されていると判定される場合、ステップ1310で、システムコンピュータは試験の実行に進み、ホルダトレーに要素が存在するかしないかを監視する。
【0077】
ホルダトレーセンサが、ステップ1312でホルダトレーにおける要素の有無を検出する場合、ステップ1314でシステムコンピュータはホルダトレーのすべての位置での要素の有無をユーザに示す。試験がステップ1316で完了するまで、ステップ1317に示すように、ステップ1310でシステムコンピュータがホルダトレーにおける要素の有無の監視を続ける。ステップ1319で、処理1300は終了する。
【0078】
図14Aおよび図14Bは、一実施形態によるスプレーポンプ収集アセンブリ1400a,1400bの斜視断面図である。スプレーポンプ収集アセンブリ1400a,1400bは、スプレーポンプボトル311、コレット312、収集容器基部1413b、および収集容器上部1413aを有する。収集容器上部1413aおよび収集容器基部1413bはスレッドを有し、このスレッドが、収集容器上部1413aと収集容器基部1413bとをねじ留めする。
【0079】
収集容器基部1413bは、第1の内壁1411を有して第1の収集領域1412を形成し、第2の内壁1415を有して、第1の内壁1411と第2の内壁1415の間に第2の収集領域1416を形成する。第2の内壁1415と第2の収集領域1416は、収集容器基部1413bに挿入される「プラグ」を構成する。第1の収集領域1412はスプレーボトル311から排出される製剤の大部分を収集する。第1の収集領域1412で収集されない残りの製剤は、第2の収集領域1416で収集される。
【0080】
スプレーポンプ収集アセンブリ1400a,1400bはコレット312を有する。コレット312は、スレッド1411を有する開口を備える。コレット312の開口は、コレット312がスプレーボトルのノズル先端に螺装されるときに開口のスレッド1411がスプレーボトルのノズル先端を把持するように、先細りになっている。スプレーボトルノズル先端の基部をコレット312の開口のスレッド1411が把持しているため、スプレーボトル311の噴霧機能に影響を与えない。コレット312は、例えば、ロボットハンドラまたはアクチュエータによって、スプレーボトル311の取り扱いを容易にする。
【0081】
図15は、DCU、ポンプ送達、スプレーパターン、および液滴径分布試験のための自動スプレーポンプ試験システム1500の一実施形態を示す正面図である。自動スプレーポンプ試験システム1500は、DCUおよびポンプ送達試験領域112に加えて、統合された光学測定3次元領域1520および光学測定装置のための拡張3次元領域1510を有する。
【0082】
図16Aは、スプレーパターンおよび液滴径分布試験のための光学測定3次元領域および光学装置拡張3次元領域1600の斜視図である。図16Aに示すように、光学測定3次元領域1520は、スプレーパターンおよび液滴径分布測定を行うための隔離された筐体1621を有する。筐体1621は、スプレーパターンおよび液滴径分布測定において、スプレーボトルから排出される製剤を収容する手段となる。液滴径分布測定については、光学測定3次元領域はレーザ1612を有し、拡張3次元領域1510は対応する受光部1611を有する。アクチュエータ250は、昇降アセンブリ1627に連結され、この昇降アセンブリ1627は、スプレーパターンおよび液滴径分布測定のために、DCUおよびポンプ送達試験領域112から筐体1621にスプレーボトル311を搬送する。昇降アセンブリ1627のおかげで、自動ノズル先端は光学軸の位置決めを行うことができる。この筐体によって、洗浄が容易になり、光学用のハードウェアが保護される。
【0083】
図16Bは、図16Aの光学測定3次元領域および光学装置拡張3次元領域1600の斜視図であり、スプレーパターン試験を示す。スプレーパターン試験のために、レーザ1623は光シート1624を射出し、カメラ1625は、アクチュエータ250がスプレーボトル311を作動させると、カメラの視野1626内の画像を取り込む。
【0084】
図16Cは、図16Aの光学測定3次元領域および光学装置拡張3次元領域1600の斜視図であり、液滴径分布試験を示す。昇降アセンブリ1627はスプレーボトル311のノズル先端を位置決めして、ノズル先端と、レーザ1612から射出されて受光部1611で受光されるレーザビーム1513の光学軸との距離を所望のものとする。
【0085】
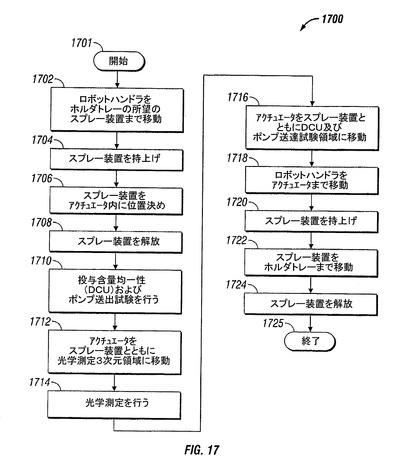
図17は、図15および図16Aから図16Cの自動スプレーポンプ試験システムを用いてスプレーポンプ装置の試験を行う処理1700を示すフローチャートである。開始(ステップ1701)の後、ロボットハンドラはステップ1702でホルダトレーの所望のスプレー装置まで移動して、ステップ1704でスプレー装置を持ち上げる。ステップ1706において、ロボットハンドラはスプレー装置をアクチュエータ内に位置決めして固定し、ステップ1708でスプレー装置を解放する。ステップ1710で、投与含量均一性(DCU)およびポンプ送達試験が行われる。DCUおよびポンプ送達試験が完了すると、アクチュエータがスプレー装置とともに、ステップ1712で光学測定3次元領域まで移動され、ステップ1714で、スプレーパターンおよび液滴径分布測定等の光学測定が行われる。
【0086】
ステップ1714で光学測定が行われた後、アクチュエータは、スプレー装置とともにステップ1716でDCUおよびポンプ送達試験領域まで戻る。終了(ステップ1725)の前に、ステップ1718でロボットハンドラはアクチュエータまで移動して、ステップ1720でスプレー装置を持ち上げ、ステップ1722でスプレー装置をホルダトレーまで移動させて、ステップ1724でスプレー装置を解放する。
【0087】
本発明を、例示的実施形態を参照して詳細に図示して説明してきたが、形態および細部における様々な変更を、添付の特許請求の範囲に包含される本発明の範囲から逸脱することなく実行可能であることは当業者には理解されるであろう。
【0088】
上述の、図4Aから4C、6、8、10,11、13、および17のフローチャートはいずれも、ハードウェア、ファームウェアまたはソフトウェアで実現できることは言うまでもない。ソフトウェアで実現される場合、ソフトウェアは、任意の形態の機械読取り可能な媒体(例えば、CD−ROM)に記憶され、少なくとも1つの汎用プロセッサまたはアプリケーション固有のプロセッサによってロードされ実行されることができる、任意の適切な形式のソフトウェアである。
【符号の説明】
【0089】
114 システムコンピュータ
210 トレー
211 スプレーポンプアセンブリ
213,215 収集器
220 ロボットハンドラ
250 アクチュエータ
255 計重装置
【特許請求の範囲】
【請求項1】
スプレーポンプアセンブリの試験を実施するシステムであって、
試験中に個々のスプレーポンプアセンブリを作動させるスプレーポンプアセンブリアクチュエータと、
複数のスプレーポンプアセンブリと複数の収集器のいずれか一方または両方を把持するトレーと、
スプレーポンプアセンブリと収集器のいずれか一方または両方を計重する計重装置と、
前記スプレーポンプアセンブリと前記収集器のいずれか一方または両方を、前記アクチュエータ、前記計重装置および前記トレーの間で搬送するロボットハンドラと、
前記スプレーポンプアセンブリの試験を行うために、制御信号および感知信号を、前記スプレーポンプアクチュエータ、前記計重装置、前記トレーおよび前記ロボットハンドラの間で交信するシステムコンピュータとを備えたシステム。
【請求項2】
請求項1において、前記システムコンピュータは、スプレーポンプ送達試験とスプレー含量均一性試験のいずれか一方または両方を実施する、システム。
【請求項3】
請求項1において、特定の収集器を対応するスプレーポンプアセンブリの作動前後で計重するように、試験中に、前記スプレーポンプアクチュエータ、前記計重装置および前記ロボットハンドラを制御することによって、前記システムコンピュータが送達投与重量を計算する、システム。
【請求項4】
請求項1において、特定のスプレーポンプアセンブリをその作動前後で計重するように、試験中に、前記スプレーポンプアクチュエータ、前記計重装置および前記ロボットハンドラを制御することによって、前記システムコンピュータが計量投与重量を計算する、システム。
【請求項5】
請求項1において、特定の収集器を対応するスプレーポンプアセンブリの作動前後で計重するように、試験中に、(a)前記スプレーポンプアクチュエータ、前記計重装置および前記ロボットハンドラを制御することによって、前記システムコンピュータが送達投与重量を計算し、かつ、(b)特定のスプレーポンプアセンブリをその作動前後で計重するように、試験中に、前記スプレーポンプアクチュエータ、前記計重装置および前記ロボットハンドラを制御することによって、前記システムコンピュータが計量投与重量を計算する、システム。
【請求項6】
請求項1において、前記ロボットハンドラは電気機械式グリッパを有し、この電気機械式グリッパは、
回転モータと、
前記回転モータと連結された線形スクリューであって、前記線形スクリューの第1端部に右ねじを有し、前記線形スクリューの第2端部に左ねじを有する線形スクリューと、
前記線形スクリューの前記第1端部に連結された第1グリッパ部材であって、前記回転モータが第2の方向に前記線形スクリューを回転させると、第1の方向に移動する、第1グリッパ部材と、
前記線形スクリューの前記第2端部に連結された第2グリッパ部材であって、前記回転モータが前記第2の方向に前記線形スクリューを回転させると、前記第1の方向とは反対の第3の方向に移動する、第2グリッパ部材とを備えた、システム。
【請求項7】
請求項6において、前記電気機械式グリッパは、さらに、
グリッパ素子にそれぞれ移動可能に連結された個別のジョーを有し、前記グリッパ素子はそれぞれ前記ジョーの動きを感知するセンサを有する、システム。
【請求項8】
請求項1において、さらに、
中心軸のまわりに配置された開口を持つクランプを有するスプレーポンプホルダ部材を備え、
前記開口は、前記クランプの底部側に第1の直径、前記クランプの上端側に第2の直径を有し、前記開口はスレッドを有し、
スプレーポンプノズル部材が前記中心軸に沿って前記開口に挿入され、前記クランプは、前記スプレーポンプノズル部材を前記クランプに固定する方向に回転される、システム。
【請求項9】
請求項1において、さらに、
ノズル先端軽打器を備え、このノズル先端軽打器は、基部、吸収パッド、および前記吸収パッドと前記ノズル先端軽打器との間に配置されるスポンジ状パッドを有する、システム。
【請求項10】
請求項1において、各スプレーポンプアセンブリの存在を感知するように、前記トレーは、各スプレーポンプアセンブリに対応したセンサを有する、システム。
【請求項11】
スプレーポンプアセンブリの試験を実施するシステムであって、
スプレーポンプアセンブリの第1の試験を実施する第1試験装置を有する第1試験区域と、
前記第1試験区域に連結された第2試験区域であって、前記スプレーポンプアセンブリの第2の試験を実施する第2試験装置を有する第2試験区域と、
昇降アセンブリに連結されたスプレーポンプアセンブリアクチュエータであって、前記昇降アセンブリは、前記第1測定区域と前記第2測定区域の間で前記アクチュエータを移動させる、スプレーポンプアセンブリアクチュエータとを備えたシステム。
【請求項12】
請求項11において、前記第1試験領域は、前記スプレーポンプアセンブリを操作して搬送するロボットハンドラを有する、システム。
【請求項13】
請求項11において、前記第1試験装置は計重装置であり、前記第2試験装置は、(i)スプレーパターンを測定するカメラおよび第1レーザ、もしくは(ii)レーザ回折を通して液滴径分布を測定する第2レーザおよび受光器、または前記(i)および(ii)の両方を有する、システム。
【請求項14】
スプレーポンプアセンブリの試験を実施する方法であって、
第1試験装置を用いて第1試験区域でスプレーポンプアセンブリの第1試験を実施する工程と、
第2試験装置を用いて第2試験区域で前記スプレーポンプアセンブリの第2試験を実施する工程とを備えた、方法。
【請求項15】
請求項14において、前記第1試験装置は計重装置であり、前記第2試験装置は、(i)スプレーパターンを測定するカメラおよび第1レーザ、もしくは(ii)レーザ回折を通して液滴径分布を測定する第2レーザおよび受光器、または前記(i)および(ii)の両方を有する、方法。
【請求項1】
スプレーポンプアセンブリの試験を実施するシステムであって、
試験中に個々のスプレーポンプアセンブリを作動させるスプレーポンプアセンブリアクチュエータと、
複数のスプレーポンプアセンブリと複数の収集器のいずれか一方または両方を把持するトレーと、
スプレーポンプアセンブリと収集器のいずれか一方または両方を計重する計重装置と、
前記スプレーポンプアセンブリと前記収集器のいずれか一方または両方を、前記アクチュエータ、前記計重装置および前記トレーの間で搬送するロボットハンドラと、
前記スプレーポンプアセンブリの試験を行うために、制御信号および感知信号を、前記スプレーポンプアクチュエータ、前記計重装置、前記トレーおよび前記ロボットハンドラの間で交信するシステムコンピュータとを備えたシステム。
【請求項2】
請求項1において、前記システムコンピュータは、スプレーポンプ送達試験とスプレー含量均一性試験のいずれか一方または両方を実施する、システム。
【請求項3】
請求項1において、特定の収集器を対応するスプレーポンプアセンブリの作動前後で計重するように、試験中に、前記スプレーポンプアクチュエータ、前記計重装置および前記ロボットハンドラを制御することによって、前記システムコンピュータが送達投与重量を計算する、システム。
【請求項4】
請求項1において、特定のスプレーポンプアセンブリをその作動前後で計重するように、試験中に、前記スプレーポンプアクチュエータ、前記計重装置および前記ロボットハンドラを制御することによって、前記システムコンピュータが計量投与重量を計算する、システム。
【請求項5】
請求項1において、特定の収集器を対応するスプレーポンプアセンブリの作動前後で計重するように、試験中に、(a)前記スプレーポンプアクチュエータ、前記計重装置および前記ロボットハンドラを制御することによって、前記システムコンピュータが送達投与重量を計算し、かつ、(b)特定のスプレーポンプアセンブリをその作動前後で計重するように、試験中に、前記スプレーポンプアクチュエータ、前記計重装置および前記ロボットハンドラを制御することによって、前記システムコンピュータが計量投与重量を計算する、システム。
【請求項6】
請求項1において、前記ロボットハンドラは電気機械式グリッパを有し、この電気機械式グリッパは、
回転モータと、
前記回転モータと連結された線形スクリューであって、前記線形スクリューの第1端部に右ねじを有し、前記線形スクリューの第2端部に左ねじを有する線形スクリューと、
前記線形スクリューの前記第1端部に連結された第1グリッパ部材であって、前記回転モータが第2の方向に前記線形スクリューを回転させると、第1の方向に移動する、第1グリッパ部材と、
前記線形スクリューの前記第2端部に連結された第2グリッパ部材であって、前記回転モータが前記第2の方向に前記線形スクリューを回転させると、前記第1の方向とは反対の第3の方向に移動する、第2グリッパ部材とを備えた、システム。
【請求項7】
請求項6において、前記電気機械式グリッパは、さらに、
グリッパ素子にそれぞれ移動可能に連結された個別のジョーを有し、前記グリッパ素子はそれぞれ前記ジョーの動きを感知するセンサを有する、システム。
【請求項8】
請求項1において、さらに、
中心軸のまわりに配置された開口を持つクランプを有するスプレーポンプホルダ部材を備え、
前記開口は、前記クランプの底部側に第1の直径、前記クランプの上端側に第2の直径を有し、前記開口はスレッドを有し、
スプレーポンプノズル部材が前記中心軸に沿って前記開口に挿入され、前記クランプは、前記スプレーポンプノズル部材を前記クランプに固定する方向に回転される、システム。
【請求項9】
請求項1において、さらに、
ノズル先端軽打器を備え、このノズル先端軽打器は、基部、吸収パッド、および前記吸収パッドと前記ノズル先端軽打器との間に配置されるスポンジ状パッドを有する、システム。
【請求項10】
請求項1において、各スプレーポンプアセンブリの存在を感知するように、前記トレーは、各スプレーポンプアセンブリに対応したセンサを有する、システム。
【請求項11】
スプレーポンプアセンブリの試験を実施するシステムであって、
スプレーポンプアセンブリの第1の試験を実施する第1試験装置を有する第1試験区域と、
前記第1試験区域に連結された第2試験区域であって、前記スプレーポンプアセンブリの第2の試験を実施する第2試験装置を有する第2試験区域と、
昇降アセンブリに連結されたスプレーポンプアセンブリアクチュエータであって、前記昇降アセンブリは、前記第1測定区域と前記第2測定区域の間で前記アクチュエータを移動させる、スプレーポンプアセンブリアクチュエータとを備えたシステム。
【請求項12】
請求項11において、前記第1試験領域は、前記スプレーポンプアセンブリを操作して搬送するロボットハンドラを有する、システム。
【請求項13】
請求項11において、前記第1試験装置は計重装置であり、前記第2試験装置は、(i)スプレーパターンを測定するカメラおよび第1レーザ、もしくは(ii)レーザ回折を通して液滴径分布を測定する第2レーザおよび受光器、または前記(i)および(ii)の両方を有する、システム。
【請求項14】
スプレーポンプアセンブリの試験を実施する方法であって、
第1試験装置を用いて第1試験区域でスプレーポンプアセンブリの第1試験を実施する工程と、
第2試験装置を用いて第2試験区域で前記スプレーポンプアセンブリの第2試験を実施する工程とを備えた、方法。
【請求項15】
請求項14において、前記第1試験装置は計重装置であり、前記第2試験装置は、(i)スプレーパターンを測定するカメラおよび第1レーザ、もしくは(ii)レーザ回折を通して液滴径分布を測定する第2レーザおよび受光器、または前記(i)および(ii)の両方を有する、方法。
【図1】

【図2A】
【図2B】
【図2C】
【図3】
【図4A】
【図4B】
【図4C】
【図5A】
【図5B】
【図5C】
【図6】
【図7A】
【図7B】
【図8】
【図9】
【図10】
【図11】
【図12A】
【図12B】
【図13】
【図14A】
【図14B】
【図15】
【図16A】
【図16B】
【図16C】
【図17】
【図2A】
【図2B】
【図2C】
【図3】
【図4A】
【図4B】
【図4C】
【図5A】
【図5B】
【図5C】
【図6】
【図7A】
【図7B】
【図8】
【図9】
【図10】
【図11】
【図12A】
【図12B】
【図13】
【図14A】
【図14B】
【図15】
【図16A】
【図16B】
【図16C】
【図17】
【公表番号】特表2010−509591(P2010−509591A)
【公表日】平成22年3月25日(2010.3.25)
【国際特許分類】
【出願番号】特願2009−536321(P2009−536321)
【出願日】平成19年11月9日(2007.11.9)
【国際出願番号】PCT/US2007/023679
【国際公開番号】WO2008/060484
【国際公開日】平成20年5月22日(2008.5.22)
【出願人】(509129417)プロヴェリス・サイエンティフィック・コーポレーション (1)
【氏名又は名称原語表記】PROVERIS SCIENTIFIC CORPORATION
【Fターム(参考)】
【公表日】平成22年3月25日(2010.3.25)
【国際特許分類】
【出願日】平成19年11月9日(2007.11.9)
【国際出願番号】PCT/US2007/023679
【国際公開番号】WO2008/060484
【国際公開日】平成20年5月22日(2008.5.22)
【出願人】(509129417)プロヴェリス・サイエンティフィック・コーポレーション (1)
【氏名又は名称原語表記】PROVERIS SCIENTIFIC CORPORATION
【Fターム(参考)】
[ Back to top ]