
自動/半自動/手動スライド型移動通信端末機
【課題】
自動/半自動または自動/手動でスライドされるスライド型移動通信端末機に関する。
【解決手段】
重なり合う第1本体と第2本体が互いにスライドされるスライド開閉式通信端末機において、駆動部;動力伝達部;上記動力伝達部を内部に収容し、上記駆動部を内部に固定し、上記第2本体に回転可能に収容される円筒形のハウジング;上記ハウジングの回転により上記第1本体をスライドさせる第1駆動手段;上記第1駆動手段と接触して上記第1駆動手段の回転動作を上記第1本体のスライド動作に変換する第2駆動手段;駆動制御部; を含み、第2本体にその一端が固定された上記動力伝達部の回転制限及び上記一対の部材の選択的係合により上記駆動部が固定された上記ハウジングが回転し、上記ハウジングの回転により上記第1駆動手段と第2駆動手段とが接触してスライド動作が行われるスライド型移動通信端末機を提供する。
自動/半自動または自動/手動でスライドされるスライド型移動通信端末機に関する。
【解決手段】
重なり合う第1本体と第2本体が互いにスライドされるスライド開閉式通信端末機において、駆動部;動力伝達部;上記動力伝達部を内部に収容し、上記駆動部を内部に固定し、上記第2本体に回転可能に収容される円筒形のハウジング;上記ハウジングの回転により上記第1本体をスライドさせる第1駆動手段;上記第1駆動手段と接触して上記第1駆動手段の回転動作を上記第1本体のスライド動作に変換する第2駆動手段;駆動制御部; を含み、第2本体にその一端が固定された上記動力伝達部の回転制限及び上記一対の部材の選択的係合により上記駆動部が固定された上記ハウジングが回転し、上記ハウジングの回転により上記第1駆動手段と第2駆動手段とが接触してスライド動作が行われるスライド型移動通信端末機を提供する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は自動/半自動/手動スライド型移動通信端末機に関するものであって、より詳しくは駆動部、選択的に係合する一対の部材、駆動手段、及びセンサ部を具備することにより自動/半自動または自動/手動で第1本体と第2本体とが相互スムーズにスライドする自動スライド型移動通信端末機に関するものである。
【背景技術】
【0002】
一般にスライド型移動通信端末機は重なり合う上部本体、下部本体、及び上記上部本体が相対的にスライドすることにより開閉されるスライド構造を有する。
【0003】
こうしたスライド型移動通信端末機は一側に固定されスライドを案内するガイドと上記ガイドに沿って往復スライド運動するスライダーを含むスライドモジュールを具備し、上記スライダーは上記ガイドが固定された一側の対向側に締結される。
【0004】
例えば、上記上部本体の背面にガイドが設けられると、上記スライダーはそれと接する上記下部本体の前面一側に結合され共に往復スライド運動をするのである。
【0005】
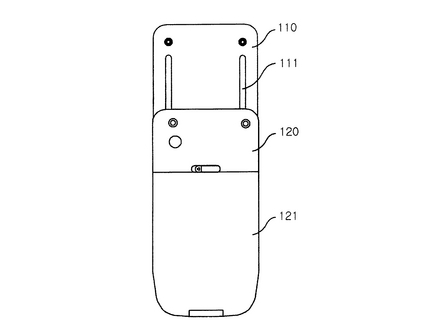
図1は従来のスライド型移動通信端末機の背面を示し、これについて説明すれば次のとおりである。
【0006】
前面にディスプレー画面(図示せず)が設けられた上部本体(110)と背面にバッテリーパック(121)が結合された下部本体(120)とが平行に重なり合って往復スライド運動を行うことにより開閉がなされる。上記上部本体(110)の背面にはガイドスリット(111)が形成され、その内部にスライドを案内するガイド(図示せず)が設けられ、上記ガイドに沿って往復スライド運動するスライダーは上記下部本体(120)と共にスライドする。
【0007】
ここで、上記ガイドとスライド間にはコイルスプリングまたはぜんまいなどの弾性手段が設けられ、端末機が閉じられた状態から開かれる方向へ復元力を与えることにより端末機が手動で開かれるようにする。
【0008】
しかし、こうした従来のスライドモジュールはフォルダー型に比して相対的に開閉し難く片手で容易に開閉できないなどの問題があった。
【0009】
したがって、上記のような問題を防止できる自動スライド型移動通信端末機が当該技術分野において要求されてきた。
【0010】
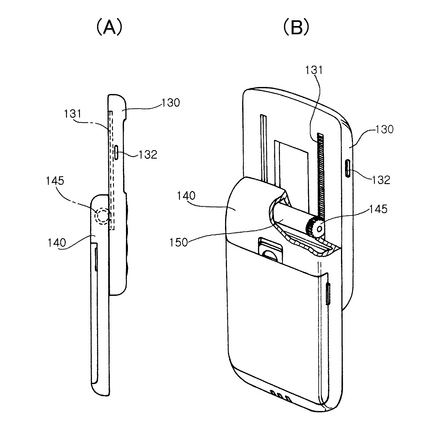
こうしたスライド型移動通信端末機の開閉動作を自動で具現した従来のスライド型移動通信端末機の背面概略図が図2に示してある。
【0011】
図2のスライド型移動通信端末機は、第2本体(140)の一端に装着されたピニオンギア(145)、第1本体(130)の一側に縦方向に装着され上記ピニオンギア(145)と係合するラック(131)、第2本体(140)に装着され駆動力を与える駆動モータ(図示せず)、上記駆動モータの駆動力をピニオンギア(145)に伝達する動力伝達部(150)、及び上記駆動モータの作動を制御する制御スイッチ(132)から成る。
【0012】
上記スライド型移動通信端末機は第2本体(140)が閉じられた状態において使用者が制御スイッチを操作することにより駆動モータが作動されると、上記駆動モータの回転力が動力伝達部を介してピニオンギア(145)に伝達され、上記ピニオンギアが回転するようになり、これに係合するラック(131)が移動して第1本体(130)が展伸し開き動作を行うことになる。
【0013】
このようにピニオンギア(145)とラック(131)を利用して自動動作を具現する従来のスライド型移動通信端末機は自動動作の具現は簡単であるが、手動動作の具現時従来の手動スライド型移動通信端末機と同様に片手で開閉し難いばかりでなく、一度の外力で完全に開閉させがたいとの問題がある。
【0014】
また、第1本体(130)の背面にラック(131)が形成されており、第2本体が開かれた状態であると外部から上記ラック(131)が見えるので外観上良くないとの問題がある。
【0015】
一方、上記のような自動スライド型移動通信端末機は回転作動の開始後一定時間が経過するかまたはモータが一定角度回転した後に駆動モータを中止させることで自動スライド動作を行うよう構成されるが、駆動トルクの変化などモータの駆動力が変化する場合には完全な開閉を保障できず、ラック及びピニオンギアの係合に不良が発生する場合には第2本体が第1本体に対して正確に開閉されなくなるとの問題が起こる。
【0016】
こうした問題を解決するために完全開閉を遂げる設定位置まで展伸・縮退させる機能を果たす位置感知手段が要求されてきた。
【0017】
また、外部から外力が作用して第2本体が完全に展伸されなくなる場合にはモータに電源が供給され続けバッテリーが早く消耗されてしまう問題が生じ、駆動システムに過負荷による故障が起こりかねないので、効果的に原点に戻れる移動通信端末機が要請される。
【発明の開示】
【発明が解決しようとする課題】
【0018】
本発明は上記のような従来の問題を解消するためのものとして、駆動部、選択的に係合する一対の部材、駆動手段、及びセンサ部を設けることにより自動/半自動/手動動作が全て可能で、より容易且つスムーズに開閉できるスライド型移動通信端末機を提供することに目的がある。
【0019】
また、本発明はセンサ部を設けて自動または半自動作動の際本体の完全開閉を成し遂げることに目的があり、とりわけ外力が作用して完全開閉が遂げられない場合自動に原点復帰する装置を提供することに目的がある。
【0020】
一方、本発明はスライド装置を本体内部に装着し、美観に優れ組立容易なスライド型移動通信端末機を提供することに目的がある。
【課題を解決するための手段】
【0021】
上記目的を成し遂げるために本発明は、重なり合う第1本体と第2本体が相互スライドするスライド開閉式通信端末機において、スライド開閉動作に必要な駆動力を供給する駆動部;一側は上記駆動部の回転軸に軸方向に連結され他側は上記第2本体に固定され、弾性手段により選択的に係合する一対の部材を通して上記駆動部の駆動力または外力を伝達するか伝達してもらう動力伝達部;上記動力伝達部を内部に収容し、その回転軸が上記駆動部の回転軸と一致するよう上記駆動部を内部に固定し、上記第2本体に回転可能に収容される円筒形のハウジング;上記ハウジングの一側に固定され上記ハウジングの回転により上記第1本体をスライドさせる第1駆動手段;上記第1本体に収容され、上記第1駆動手段と接触して上記第1駆動手段の回転動作を上記第1本体のスライド動作に変換する第2駆動手段;上記第1本体のスライド動作を制御するために駆動部の駆動を制御する駆動制御部;を含み、第2本体にその一端が固定された上記動力伝達部の回転制限及び上記一対の部材の選択的噛合により上記駆動部が固定された上記ハウジングが回転し、上記ハウジングの回転により上記第1駆動手段と第2駆動手段とが接触しスライド動作が行われるスライド型移動通信端末機を提供する。
【0022】
好ましくは、上記動力伝達部は上記駆動部の回転軸に連結され駆動部の駆動力を伝達するヒンジーシャフト;上記ヒンジーシャフトと選択的に係合するスライドカム;上記スライドカムを収容するガイドカム;及び、上記ヒンジーシャフトと上記スライドカムとを選択的に係合させる弾性力を与える弾性手段;を含み、上記一対の部材は上記ヒンジーシャフト及び上記スライドカムから成るスライド型移動通信端末機を提供する。
【0023】
本明細書及び特許請求範囲においては接触によりスライドされる本体を第1本体、ハウジングを収容する本体を第2本体と定義し、ハウジングの収容当否により上部本体が第1本体または第2本体となり得ることを明かしておく。
【発明の効果】
【0024】
本発明によるスライド型移動通信端末機はモータ、選択的に係合する一対の部材、駆動手段、及びセンサ部を設けることにより自動/半自動/手動動作が全て可能で、端末機をより容易且つスムーズに開閉できる効果を奏する。
【0025】
また、本発明によると手動動作時弾性手段を利用することにより端末機をよりスムーズに開閉できるばかりでなく原点復帰が可能な効果を奏する。
【0026】
とりわけ、センサ部を設けることにより自動または半自動動作時本体の完全開閉が行えるようにでき、外力が作用して完全開閉が遂げられないと自動で展伸及び縮退動作を完了できる効果を奏する。
【0027】
また、本発明によると構造が簡単で、部品がハウジングモジュールで提供されるので組立性に優れ、とりわけ第1駆動手段が回転バーの場合にはスライド装置を本体内部に装着し美観に優れる効果を奏する。
【発明を実施するための最良の形態】
【0028】
以下、添付の図に基づき本発明の好ましき実施例をより詳しく説明すれば次のとおりである。
【0029】
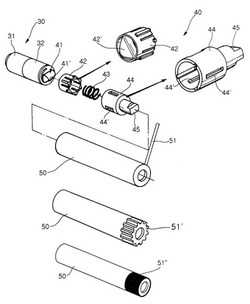
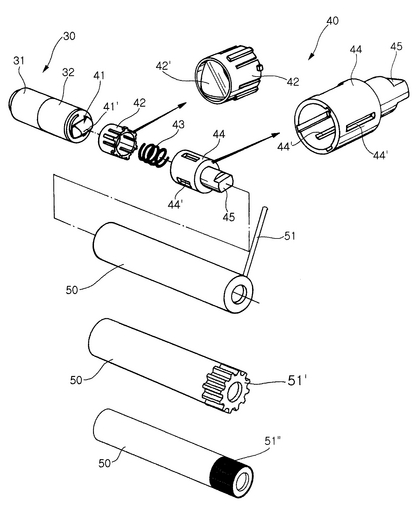
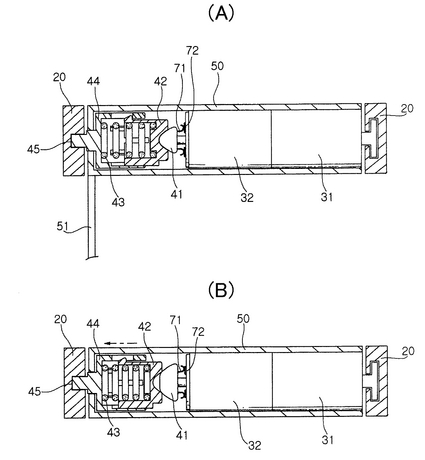
図3は本発明によるスライド型移動通信端末機の主要部品の斜視図で、図4A及び図4Bは夫々自動/半自動及び手動スライド動作の説明図を示す。また、図5A及び図5Bは夫々本発明によるスライド型移動通信端末機の主要部品の装着状態の一実施例を示す平面図と側面図で、図6A及び図6Bは夫々本発明によるスライド型移動通信端末機の主要部品の装着状態の他実施例を示す側面図である。
【0030】
先ず、本発明によるスライド型移動通信端末機は駆動部(31)、上記駆動部の回転軸に連結され駆動部の駆動力を伝達し、弾性手段により選択的に係合する 一対の部材を駆動する動力伝達部(40)、上記動力伝達部を収容するハウジング(50)、上記ハウジングに固定された第1駆動手段(51)、上記第1駆動手段と接触する第2駆動手段(15)を含む。
【0031】
また、本発明によるスライド型移動通信端末機は上記第1本体のスライド動作を制御するために駆動部の駆動を制御する駆動制御部(図示せず)を含む。
【0032】
図3に示すように、駆動部(31)は移動通信端末機に設けられたバッテリーから電源を供給してもらい自動または半自動のスライド動作に動力を供給する役目を果たし、駆動部のケースはハウジングに固定されハウジングと一体で回転する。
【0033】
好ましくは、上記駆動部(31)はモータから成り、上記モータ(31)は出力側にギアボックス(32)を設けたギャードモータが使用されることができる。上記ギアボックスは駆動トルクが増幅されるよう約500〜600:1の一定の減速比を有する油性ギア型減速機が設けられることができ、減速機能と逆転防止の役目を同時に果たす。
【0034】
一方、図3に示すように、動力伝達部(40)は上記モータの回転軸に固定されたヒンジーシャフト(41)、上記ヒンジーシャフトと選択的に係合するスライドカム(42)、上記スライドカムを収容するガイドカム(44)、及び上記スライドカムとガイドカムとを選択的に係合させるよう弾性力を与える弾性手段(43)を含む。
【0035】
ここで、上記ヒンジーシャフト(41)は上記モータ(またはギャードモータ)の回転軸に固定され、モータの駆動時モータと相対回転を行うようになる。即ち、モータが駆動される際ヒンジーシャフトの回転が制限されるとモータ自体が回転するようになる。
【0036】
上記スライドカム(42)は上記弾性手段(43)の弾性力により上記ヒンジーシャフトと選択的に係合するようになる。
【0037】
好ましくは、後述するように回転バーを使用すると180度回転によりスライド動作が完了するので、上記ヒンジーシャフトと上記スライドカムとは180度ごとに係合する。
【0038】
図3に示すように、上記ヒンジーシャフト(41)はテーパーを有する突起(41')が形成され雄型カムとして作用し、上記スライドカム(42)は上記雄型カムの突起(41')に対応する溝(42')が一側に形成され雌型カムとして作用する。
【0039】
これとは逆に、上記ガイドカムを雄型カムに、上記ヒンジーシャフトを雌型カムに形成することもできる。
【0040】
上記ガイドカム(44)は上記スライドカムを回転方向には相対的に拘束し、軸方向には移動可能に収容する。
【0041】
即ち、図3に示すように上記ガイドカム(44)は周縁部にキー溝(key groove、44')が形成され、ここに上記スライドカム(42)がキー固定されるようにする。これにより上記スライドカム(42)は、回転方向には上記ガイドカム(44)に固定され上記ガイドカムの回転時共に回転し、軸方向には上記キー溝(44')の長さだけ移動できるのである。
【0042】
また、上記ガイドカム(44)の一端に設けられた突出部(45)は図4のようにハウジングに形成された貫通孔を通過して第2本体に固定されるので、上記ガイドカム及びこれに収容されたスライドカムの回転が制限さえる。
【0043】
上記弾性手段(43)は上記スライドカムとガイドカムとが選択的に係合するよう機能する。即ち、上記弾性手段は上記スライドカム(42)と上記ガイドカム(44)間に位置し上記スライドカムを上記ヒンジーシャフト(41)側に加圧する機能を果たし、こうした機能を行うために圧縮コイルスプリングであることが好ましい。
【0044】
好ましくは、上記弾性手段(43)は上記モータの駆動力よりは大きく外力よりは小さい弾性力を有するよう形成され、自動/半自動スライドの場合には図4Aのように膨張され上記スライドカム(42)と上記ヒンジーシャフト(41)とが係合するようにし結果としてモータ自体が回転するようにし、外力による手動スライドの場合には図4Bのように圧縮され上記ヒンジーシャフト(41)と上記スライドカム(42)との係合が解除されるようにする。
【0045】
より好ましくは、後述するように上記弾性手段(43)は第1駆動手段に回転バー(51)を使用する場合、回転バー(51)がスライド面と垂直の時最大圧縮状態にあり、上記第2本体が完全に展伸した状態または完全に縮退した状態の場合にもやや圧縮された状態であるようにすることができ、これによって第1本体に作用するわずかな外力によって開閉動作が開始されることを防止し、端末機を安定的に使用できるようにする効果がある。
【0046】
図4に示すようにハウジング(50)は上記モータ(31)及び上記動力伝達部(40)を収容する。この際、モータ(31)は上記ハウジングの内面に固定されるのでハウジングと共に回転することになり、上記ガイドカム(44)は上記ハウジングと相対回転できるよう形成される。
【0047】
即ち、上記ハウジング(50)は自動または半自動動作の場合、その内部に固定されたモータ(31)の駆動力により回動し、手動動作の場合第1駆動手段に与えられる外力により回動する。
【0048】
また、図3に示すように、第1駆動手段は上記ハウジング(50)の円周面一側に固定され、上記ハウジングの回動に応じて第2駆動手段と接触しながら第1本体をスライドさせる。
【0049】
好ましくは、図3及び図5Bのように、上記第1駆動手段は上記ハウジングの円周面一側に上記ハウジングの回転軸と垂直に固定され、上記ハウジングの回動に応じて第1本体をスライドさせる回転バー(51)で、上記第2駆動手段は上記第1本体の内部に形成され上記回転バーと連続的に接触するガイド面(15)である。
【0050】
ここで、上記ガイド面(15)は図5Bのように上記回転バー(51)と接触によりスライドするよう第1本体(10)の内部に形成され、上記ガイド面(15)と回転バー(51)との接触により第1本体がスライドする。
【0051】
また、上記ガイド面(15)は回転バー(51)がガイド面とスムーズに接触され続けるよう滑らかな曲面の形状に形成される。
【0052】
さらに好ましくは、図3及び図6Aに示すように、上記第1駆動手段は上記ハウジングの円周面一側に固定され、上記ハウジングの回動に応じて第1本体をスライドさせるピニオン(51')で、上記第2駆動手段は上記第1本体の背面に上記ピニオンと対応して形成され上記ピニオンと接触するラック(15')であることができる。
【0053】
さらに好ましくは、図3及び図6Bに示すように、上記第1駆動手段は上記ハウジングの円周面一側に固定され、上記ハウジングの回動に応じて第1本体をスライドさせる摩擦車(51")で、上記第2駆動手段は上記第1本体の背面に上記摩擦車と対応して形成され上記摩擦車と接触する摩擦面(15")であることができる。
【0054】
第2本体(20)は図4に示すように上記ハウジング(50)を回転可能に収容し、その一端に上記ガイドカムの突出部(45)が固定される。
【0055】
本発明は上記モータの作動当否及び作動方向を入力する開閉動作スイッチ(図示せず)に入力された信号に応じて上記モータを制御する駆動制御部(図示せず)を含むことができる。
【0056】
上記開閉動作スイッチは自動スライド動作に使用され、使用者の操作に応じて駆動手段を作動させるものであって、使用者がスイッチを操作するとモータ(31)に所定の電気信号を出力するよう構成される。こうしたスイッチは本体の一側面に通常オン/オフスイッチの形で設けられるが、移動通信端末機の形状や容易な操作位置に応じて様々な形態で提供されることができよう。ここで、上記開閉動作スイッチは自動スライド動作の具現のための専用スイッチであることができるが、他機能を兼ねたボタンを使用することもできる。
【0057】
また、上記スイッチの操作に応じて第2本体が閉じられた状態においては第2本体が開かれるよう、第2本体が開かれた状態においては第2本体が閉じられるよう駆動手段の正逆作動が制御される。
【0058】
上記駆動制御部(図示せず)は自動または半自動のスライド動作制御に使用され、上記開閉動作スイッチまたは後述するセンサ部の信号によりモータの駆動を制御する。
【0059】
このようなスライド型移動通信端末機は安定したスライド動作のためにスライドを案内するガイドと、上記ガイドに沿って往復スライド運動するスライドを含むスライドモジュールを具備する。
【0060】
上記のような構成を有する本発明によるとスライド装置が本体内部に装着されるので、美観に優れるばかりでなく、諸部品がハウジングに収容もしくは装着されたハウジングモジュールで提供され組立てが容易な効果も奏する。
【0061】
好ましくは、本発明は上記第1本体(10)のスライド動作を制御するためのセンサ部をさらに含み、上記駆動制御部は上記センサ部の信号により上記モータ(31)の駆動を制御する。
【0062】
さらに好ましくは、上記センサ部は第1本体と第2本体との相対位置(完全伸展及び完全縮退)を直接感知するセンサを設けることもでき、モータに対するヒンジーシャフト特定部分の回転を感知するセンサを設けることもできる。
【0063】
この際、使用者の選択により自動/手動及び自動/半自動モードを全て具現するためには上記センサを全て設けることが好ましい。このことに係わり、図面に基づき具体的に説明する。
【0064】
先ず、第1本体と第2本体との相対位置(完全伸展及び完全縮退)を直接感知することによりスライド動作の完了を認識するセンサ部について説明する。
【0065】
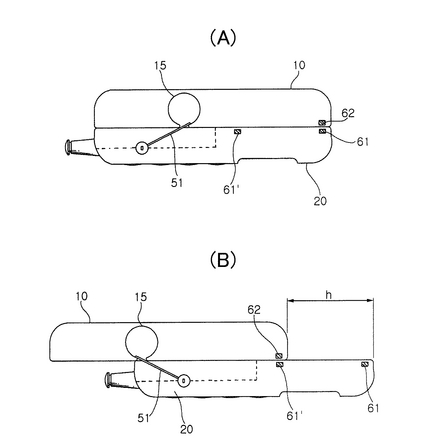
図7A及び図7Bは夫々スライド動作が完了するとこれを感知する位置感知手段が設けられたスライド型移動通信端末機の完全縮退状態と完全伸展状態を示す説明図である。
【0066】
スライド型移動通信端末機は自動または半自動の駆動のために駆動モータを駆動する方法を用い、この際駆動モータを展伸及び縮退位置まで正確に駆動させることが必要となる。このため、本発明においては図7に示すセンサ部を用いる。
【0067】
上記センサ部は第1本体または第2本体に設けられた位置感知用ターゲット(62)及び上記位置感知用ターゲットと対向した本体に少なくとも2つ以上設けられる位置感知手段(61、61')を含む。
【0068】
この際、上記位置感知手段(61、61')はスイッチングにより上記位置感知用ターゲット(62)の位置を感知することによりスライド動作の完了を認識する。
【0069】
即ち、上記位置感知手段(61、61')及び位置感知用ターゲット(62)をモータ(31)の駆動を制御する駆動制御部の制御回路(図示せず)に電気的に連結させ、スライド完了が感知されると駆動制御部が自動でモータ(31)の駆動を中断させることによりスライド動作が自動終了するようにさせられる。
【0070】
この際、上記少なくとも2つから成る感知手段(61、61')中両終端のものは第1本体(10)の展伸及び縮退時の移動距離(h)、即ち駆動ストローク(stroke)だけ離隔するよう配列される。即ち、図7において第1本体下端の位置感知手段(61)は第1本体の完全縮退位置において上記位置感知用ターゲット(62)を感知できる位置に装着され、第1本体上端の感知手段(61')は第1本体の完全伸展位置において上記位置感知用ターゲット (62)を感知できる位置に装着される。
【0071】
好ましくは、上記位置感知手段(61、61')は上記位置感知用ターゲット(62)と接触するとスイッチングされる接触式センサから成り、上記センサのスイッチングにより上記第1本体のスライド動作の完了を感知することができる。
【0072】
さらに好ましくは、上記位置感知手段(61、61')は加圧によりスイッチングされるスイッチ端子で、上記位置感知用ターゲット(62)は上記スイッチ端子と対応して設けられ、第1本体のスライド動作が完了すると上記スイッチ端子を加圧しスイッチングさせる微細な突起形状の接触端子であることができる。
【0073】
さらに好ましくは、上記位置感知手段は上記位置感知用ターゲットと接触しなくても対向さえすればスイッチングされる非接触式センサから成り、上記センサのスイッチングにより上記第1本体のスライド動作の完了を感知することができる。
【0074】
ここで、位置感知手段(61、61')を非接触式センサで構成する場合、第1本体(10)の位置感知手段は磁場が検出されるとスイッチングされる感知センサから成り、第2本体(20)の位置感知用ターゲット(62)は磁場を発するマグネットから成らなければならない。この際、上記感知センサはHall ICから成るホールセンサ、磁気抵抗効果素子(MR素子)を使用したセンサなどあらゆる種類のものが可能となる。
【0075】
先述のものとは逆に、第2本体に少なくとも2個の位置感知手段(61、61')を装着し、第2本体の感知手段と対応するよう第1本体に位置感知用ターゲット(62)を装着する構造も可能であろう。
【0076】
次に、上記モータ(31)の軸に固定されたヒンジーシャフト(41)の特定部分が一定角度を回転したことを感知することによりスライド動作の制御を可能にするセンサ部について説明する。
【0077】
上記センサ部はスライド動作の完了を制御するために上記モータ(31)に対して上記ヒンジーシャフト(41)の特定部分が一定角度回転することを感知する接触式センサまたは非接触式センサを含むことができる。
【0078】
好ましくは、上記センサ部を接触式で構成する場合、上記センサ部は図4に示すように、ブラシが突出形成されたブラシハウジング(71)と、上記ブラシに対する電気的接触を通して180度毎に通電されるよう第1パターン及び第2パターンが離隔され形成された整流ハウジング(72)とで成り、上記モータ(31)の回転により上記ブラシハウジング(71)と上記整流ハウジング(72)とが相対回転するにつれて、上記ブラシハウジングのブラシにより上記整流ハウジングの第1パターン及び第2パターンが180度毎に電気的に連結され通電する際、駆動制御部に駆動止め信号を印加するようにさせられる。
【0079】
こうした第1パターンと第2パターンの形状及びブラシの個数は所望の角度毎に通電するよう多様に形成されることができる。即ち、第1パターンと第2パターンが360度の位相においてブラシにより通電するなら、2個のブラシを使用して180度毎に通電するようにさせることができる。
【0080】
また、上記センサ部を非接触式で構成する場合に、上記センサ部は磁場が感知されるとスイッチングされる感知センサ及び上記感知センサと対応するよう設けられ磁場を発するマグネットから成り、上記モータの回転により上記感知センサと上記マグネットとが相対回転するにつれて、上記感知センサと上記マグネットとが接触しなくても対向し180度毎にスイッチングされる際、駆動制御部に 駆動止め信号を印加するようにさせられる。
【0081】
ここで、感知センサは先述したようにHall ICから成るホールセンサ、磁気抵抗効果素子(MR素子)を使用したセンサなどあらゆる種類のものを用いることができる。
【0082】
このような接触式センサまたは非接触式センサはモータの一側面及びこれに対向するヒンジーシャフトの一端に設けることもでき、ヒンジーシャフトのテーパー面及びこれに対向するハウジング内面に設けることもできる。
【0083】
このようにヒンジーシャフトの特定部分が180度を回転したことを感知するセンサは第1駆動手段?回転バー(51)である場合に有利で、第1駆動手段がピニオン(51')または摩擦車(51")である場合には第2本体の完全開閉に必要な特定回転角度を感知するセンサを使用すれば良いであろう。
【0084】
上記のように構成された本発明によるスライド型移動通信端末機は使用者の選択に応じて自動/半自動または自動/手動作動が行える。即ち、後述するように半自動と手動動作の初期状態は同一なので、使用者が半自動または手動動作のうち所望の作動モードを選択することにより半自動または手動の駆動モードが決まる。以下においては、第1駆動手段が回転バー(51)である場合について説明する。
【0085】
先ず、図4A及び図7に基づき本発明による自動スライドの原理を説明する。
使用者が第2本体(20)の縮退状態において上記開閉動作スイッチ(図示せず)を押すと、駆動制御部(図示せず)は現状態が展伸状態か縮退状態かを確認した後上記スイッチから入力された信号に応じて第2本体が開かれる方向に上記モータ(31)が回転する。もちろん、第2本体が開かれた状態においては逆方向に作動する。
【0086】
こうした縮退または展伸状態の判断は端末機自体に内蔵された回路または図7に示すように完全縮退及び完全伸展を感知するセンサ部を利用してモータの駆動方向を決定することもできる。
【0087】
図4Aに示すように、ガイドカム(44)の突出部(45)は第2本体に固定されるのでガイドカム及びこれに収容されたスライドカム(42)の回転は制限される。また、弾性手段(43)の弾性力はモータの駆動により与えられる力より大きいので、上記弾性手段(43)はモータの駆動により圧縮されずスライドカム(42)とヒンジーシャフト(41)の係合状態が維持される。
【0088】
したがって、上記スライドカムとヒンジーシャフトとが係合しヒンジーシャフト(41)の回転も制限されるので、モータが駆動されるとモータ自体が回転するしかなく、上記モータ(31)が固定されるハウジング(50)が回転し、これにより上記ハウジングに連結された回転バー(51)が回転することになる。
【0089】
このように回転バー(51)が回転すると、回転バーと第1本体(10)のガイド面(15)との接触により第1本体がスライドする。
【0090】
第1本体が完全に展伸しスライド動作が完了したことは先述したセンサ部中一つを利用し感知することができる。
【0091】
即ち、ヒンジーシャフト(41)とモータ(31)との相対回転を感知するセンサを利用する場合には上記ヒンジーシャフトの特定部分が一定角度を回転してスイッチングされると第1本体のスライド動作の完了が感知され、第2本体の完全縮退または完全伸展を感知するセンサを利用する場合にはスライド動作の完了は位置感知手段(61')と位置感知用ターゲット(62)のスイッチングにより感知される。
【0092】
この際、駆動制御部は上記センサ部の信号によりモータ(31)に駆動止め信号を印加し、これによりスライド動作が完了する。
【0093】
これとは逆に、第2本体が展伸された状態から縮退された状態への自動スライド動作も上記と同様な原理により行われる。
【0094】
本発明によるとこうした自動スライド動作を具現することにより、ピニオンとラックのみで上部本体をスライドさせられる従来の移動通信端末機に比して、自動でより容易且つスムーズに端末機を開閉させられる利点がある。
【0095】
また、本発明は使用者の選択により半自動動作が可能である。この際は、図7に示すように第1本体と第2本体との相対位置を直接感知してスライド動作の完了を認識するために位置感知手段(61、61')及び位置感知用ターゲット(62)を設けたセンサを利用する。
【0096】
使用者が第2本体(20)を展伸するために第1本体(10)をスライドさせる場合、図7Aに示した位置感知手段(61)と位置感知用ターゲット(62)のスイッチングが解除されOFF(LOW)信号を発生する。
【0097】
この際、駆動制御部は上記OFF信号を認識し、モータ(31)を第2本体が展伸する方向に駆動させるようになり、以後のスライド動作は先述した自動動作の場合と同じである。
【0098】
一方、開きスライド動作中、図7Bに示す位置感知手段(61')と位置感知用ターゲット(62)がスイッチングされるとON(HIGH)信号が発生し、モータの駆動が止まって半自動のスライド動作が終結する。
【0099】
使用者が第2本体(20)を縮退するために第1本体をスライドさせる場合にも上記と同様な原理で作動する。
【0100】
また、本発明は使用者の選択によって手動動作も可能である。
図4に基づき本発明による手動動作を説明すれば次のとおりである。
【0101】
例えば、使用者が縮退状態から展伸方向へ第1本体(10)をスライドさせると、第1本体(10)のガイド面(15)と回転バー(51)との接触により回転バーに外力が与えられるようになる。上記回転バー(51)が回転すると回転バーが固定されたハウジング(50)及び上記ハウジングに固定されたモータ(31)本体が回転するようになる。
【0102】
この際、ギャードモータ(31)は駆動されなければ回転しないのでヒンジーシャフト(41)はモータ本体と一体に回転するようになる。
【0103】
また、先述したように第2本体に固定されたガイドカム(44)及びスライドカム(42)の回転は制限されるので、結局モータ本体及びヒンジーシャフトの回転によりヒンジーシャフトがスライドカムを図4Bの矢印方向にスライドさせるようになる。
【0104】
したがって、弾性手段(43)が圧縮しながらヒンジーシャフトとスライドカムとの係合が解除され第1本体のスライド動作が可能となる。
【0105】
即ち、手動動作時はスライドカム(42)の回転が制限されるが、上記ヒンジーシャフト(41)はモータ本体と共に回転しながらスライドカムを軸方向に押し出すので、上記弾性手段(43)が圧縮されながら上記のように位置ずれが発生するのである。
【0106】
ここで、位置ずれは上記ヒンジーシャフト(41)とスライドカム(42)との係合が解除された状態を意味するもので、回転バー(51)がスライド面に垂直である場合位置ずれは90度となり、後述するように小さい外力に対抗するために完全縮退または完全伸展状態でも多少位置ずれは存在する。
【0107】
もし位置ずれが90度以下であれば、第1本体(10)は上記弾性手段(43)の復元力により原点に、即ち縮退状態に復帰するようになり、90度以上であれば上記弾性手段(41)の復元力により展伸状態で最後まで移送される。
【0108】
したがって、本発明によると一度の外力で完全開閉の手動動作が行われ、従来に比してより容易且つスムーズに開閉させることができる。
【0109】
このように本発明は手動動作も可能で、とりわけ動力伝達部の構造により従来に比してよりスムーズに端末機を開閉させられ、上記弾性手段の復元力などを利用して原点復帰させられる利点を奏する。
【0110】
また、本発明は自動または半自動動作中スライドを妨げる外力が与えられると自動で原点復帰できる。
【0111】
このように、外部から外力が作用して第2本体が完全に展伸しなくなる場合はモータに電源が供給され続けバッテリーが早く消耗されてしまう問題が生じ、駆動システムの過負荷による故障が起こりかねない問題がある。
【0112】
先述したように自動または半自動動作はヒンジーシャフト(41)とスライドカム(42)とが係合した状態において行われ、モータ(31)の駆動により回転バー(51)と第1本体のガイド面(15)とが接触し行われる。
【0113】
この際、第1本体のスライドを妨げる外力が与えられると回転バーは回転できないがモータは駆動され続ける状態なので、結局モータは過負荷状態となりヒンジーシャフト(41)がスライドカム(42)を押し出し係合が解除される。
【0114】
このように係合が解除されると、ヒンジーシャフトの特定部分が180度を回転することを感知するセンサ部を用いれば、係合が解除された状態なのでヒンジーシャフト(41)が回転するようになり、センサのスイッチングが行われスライド動作が完了する。この際、上記ヒンジーシャフトとスライドカムが位置ずれしていても手動動作におけるように原点復帰(完全伸展または完全縮退状態にスライド進行)が行われるようになる。
【0115】
しかし、本体の完全伸展及び完全縮退を感知する位置感知手段(61、61')と位置感知用ターゲット(62)を設けたセンサ部によりスライド動作の完了を感知する場合には、センサ部がスライド動作の完了を感知しないのでモータの駆動が続く。また、ヒンジーシャフトの特定部分の回転を感知するセンサ部を使用する場合であっても係合の解除に充分でない小さい外力が作用する場合にはセンサ部がスライド動作の完了を感知できないこともある。
【0116】
このように、センサ部がスライド動作の完了を感知できなければ一定時間(s)が経過した場合モータに駆動止め信号を印加してモータの駆動を止めることができ、このようにモータの駆動を止めると手動動作のように位置ずれが起こる。
【0117】
この際、位置ずれが90度以下であると、第1本体(10)は上記弾性手段(43)の復元力により原点に、即ち縮退状態に復帰し、90度以上であれば上記弾性手段(41)の復元力により展伸状態で最後まで移送されるであろう。
【0118】
ここで、一定時間(s)とは外力の無い状態においてスライド動作が完了する時間の1.5倍ないし2倍とすることが好ましい。
【0119】
このように、自動または半自動のスライド動作中外力が作用する場合、駆動制御部においてモータの駆動を止めると、上記弾性手段の復元力により原点復帰が可能である。
【0120】
一方、スライド動作の開示から完了までヒンジーシャフト(41)はモータに対して180度を回転するのに比して、回転バー(51)は180度より小さい角度を回転するようになる。
【0121】
ここで、弾性手段(43)は上記回転バー(51)がスライド面と垂直である場合最大の圧縮状態となるよう設定されるので、例えば回転バー(51)の回転角が150度であれば完全伸展または完全縮退状態では15度の位置ずれが生じ弾性手段に圧縮力が残るようになる。
【0122】
こうした残りの圧縮力は第1本体に作用するわずかな外力により開閉動作が開始されることを防止するので、端末機を安定的に使用できるようなる。
【0123】
一方、第1駆動手段がピニオン(51')または摩擦車(51")の場合、自動または半自動動作を具現するためにはヒンジーシャフトの特定部分が180度以上回転することが要求される。したがって、ヒンジーシャフトの特定部分が第1本体の完全開閉のために必要な角度だけ回転することを感知するセンサ部を使用すればよいであろう。
【0124】
また、上記ヒンジーシャフトの特定部分が180度以上回転することが要求されるので、上記ヒンジーシャフトと上記ガイドカムとは360度毎に係合するようにさせることが好ましく、この際は手動動作及び原点復帰の基準は180度となるであろう。
【0125】
本発明は特定の実施例に係わり図示し説明したが、当業界において通常の知識を有する者であれば、添付の特許請求範囲に記載された本発明の思想及び領域を外れない範囲内において本発明を多様に修正及び変更させられることを明かしておく。
【図面の簡単な説明】
【0126】
【図1】従来のスライド型移動通信端末機の概略図である。
【図2】従来の自動スライド型移動通信端末機の概略図である。
【図3】本発明によるスライド型移動通信端末機の主要部品の分解斜視図である。
【図4】A及びBは本発明によるスライド型移動通信端末機の自動/半自動/手動動作の原理を示す断面図である。
【図5】A及びBは夫々本発明によるスライド型移動通信端末機の主要部品の装着状態の一実施例を示す平面図及び側面図である。
【図6】A及びBは夫々本発明によるスライド型移動通信端末機の主要部品の装着状態の他実施例を示す側面図である。
【図7】A及びBは夫々本発明による第1本体と第2本体との相対位置を感知する位置感知手段を付着した自動スライド型移動通信端末機の完全縮退及び完全伸展状態を説明する説明図である。
【符号の説明】
【0127】
10 第1本体
20 第2本体
31 駆動部
41 ヒンジーシャフト
40 動力伝達部
42 スライドカム
44 ガイドカム
50 ハウジング
51 回転バー
【技術分野】
【0001】
本発明は自動/半自動/手動スライド型移動通信端末機に関するものであって、より詳しくは駆動部、選択的に係合する一対の部材、駆動手段、及びセンサ部を具備することにより自動/半自動または自動/手動で第1本体と第2本体とが相互スムーズにスライドする自動スライド型移動通信端末機に関するものである。
【背景技術】
【0002】
一般にスライド型移動通信端末機は重なり合う上部本体、下部本体、及び上記上部本体が相対的にスライドすることにより開閉されるスライド構造を有する。
【0003】
こうしたスライド型移動通信端末機は一側に固定されスライドを案内するガイドと上記ガイドに沿って往復スライド運動するスライダーを含むスライドモジュールを具備し、上記スライダーは上記ガイドが固定された一側の対向側に締結される。
【0004】
例えば、上記上部本体の背面にガイドが設けられると、上記スライダーはそれと接する上記下部本体の前面一側に結合され共に往復スライド運動をするのである。
【0005】
図1は従来のスライド型移動通信端末機の背面を示し、これについて説明すれば次のとおりである。
【0006】
前面にディスプレー画面(図示せず)が設けられた上部本体(110)と背面にバッテリーパック(121)が結合された下部本体(120)とが平行に重なり合って往復スライド運動を行うことにより開閉がなされる。上記上部本体(110)の背面にはガイドスリット(111)が形成され、その内部にスライドを案内するガイド(図示せず)が設けられ、上記ガイドに沿って往復スライド運動するスライダーは上記下部本体(120)と共にスライドする。
【0007】
ここで、上記ガイドとスライド間にはコイルスプリングまたはぜんまいなどの弾性手段が設けられ、端末機が閉じられた状態から開かれる方向へ復元力を与えることにより端末機が手動で開かれるようにする。
【0008】
しかし、こうした従来のスライドモジュールはフォルダー型に比して相対的に開閉し難く片手で容易に開閉できないなどの問題があった。
【0009】
したがって、上記のような問題を防止できる自動スライド型移動通信端末機が当該技術分野において要求されてきた。
【0010】
こうしたスライド型移動通信端末機の開閉動作を自動で具現した従来のスライド型移動通信端末機の背面概略図が図2に示してある。
【0011】
図2のスライド型移動通信端末機は、第2本体(140)の一端に装着されたピニオンギア(145)、第1本体(130)の一側に縦方向に装着され上記ピニオンギア(145)と係合するラック(131)、第2本体(140)に装着され駆動力を与える駆動モータ(図示せず)、上記駆動モータの駆動力をピニオンギア(145)に伝達する動力伝達部(150)、及び上記駆動モータの作動を制御する制御スイッチ(132)から成る。
【0012】
上記スライド型移動通信端末機は第2本体(140)が閉じられた状態において使用者が制御スイッチを操作することにより駆動モータが作動されると、上記駆動モータの回転力が動力伝達部を介してピニオンギア(145)に伝達され、上記ピニオンギアが回転するようになり、これに係合するラック(131)が移動して第1本体(130)が展伸し開き動作を行うことになる。
【0013】
このようにピニオンギア(145)とラック(131)を利用して自動動作を具現する従来のスライド型移動通信端末機は自動動作の具現は簡単であるが、手動動作の具現時従来の手動スライド型移動通信端末機と同様に片手で開閉し難いばかりでなく、一度の外力で完全に開閉させがたいとの問題がある。
【0014】
また、第1本体(130)の背面にラック(131)が形成されており、第2本体が開かれた状態であると外部から上記ラック(131)が見えるので外観上良くないとの問題がある。
【0015】
一方、上記のような自動スライド型移動通信端末機は回転作動の開始後一定時間が経過するかまたはモータが一定角度回転した後に駆動モータを中止させることで自動スライド動作を行うよう構成されるが、駆動トルクの変化などモータの駆動力が変化する場合には完全な開閉を保障できず、ラック及びピニオンギアの係合に不良が発生する場合には第2本体が第1本体に対して正確に開閉されなくなるとの問題が起こる。
【0016】
こうした問題を解決するために完全開閉を遂げる設定位置まで展伸・縮退させる機能を果たす位置感知手段が要求されてきた。
【0017】
また、外部から外力が作用して第2本体が完全に展伸されなくなる場合にはモータに電源が供給され続けバッテリーが早く消耗されてしまう問題が生じ、駆動システムに過負荷による故障が起こりかねないので、効果的に原点に戻れる移動通信端末機が要請される。
【発明の開示】
【発明が解決しようとする課題】
【0018】
本発明は上記のような従来の問題を解消するためのものとして、駆動部、選択的に係合する一対の部材、駆動手段、及びセンサ部を設けることにより自動/半自動/手動動作が全て可能で、より容易且つスムーズに開閉できるスライド型移動通信端末機を提供することに目的がある。
【0019】
また、本発明はセンサ部を設けて自動または半自動作動の際本体の完全開閉を成し遂げることに目的があり、とりわけ外力が作用して完全開閉が遂げられない場合自動に原点復帰する装置を提供することに目的がある。
【0020】
一方、本発明はスライド装置を本体内部に装着し、美観に優れ組立容易なスライド型移動通信端末機を提供することに目的がある。
【課題を解決するための手段】
【0021】
上記目的を成し遂げるために本発明は、重なり合う第1本体と第2本体が相互スライドするスライド開閉式通信端末機において、スライド開閉動作に必要な駆動力を供給する駆動部;一側は上記駆動部の回転軸に軸方向に連結され他側は上記第2本体に固定され、弾性手段により選択的に係合する一対の部材を通して上記駆動部の駆動力または外力を伝達するか伝達してもらう動力伝達部;上記動力伝達部を内部に収容し、その回転軸が上記駆動部の回転軸と一致するよう上記駆動部を内部に固定し、上記第2本体に回転可能に収容される円筒形のハウジング;上記ハウジングの一側に固定され上記ハウジングの回転により上記第1本体をスライドさせる第1駆動手段;上記第1本体に収容され、上記第1駆動手段と接触して上記第1駆動手段の回転動作を上記第1本体のスライド動作に変換する第2駆動手段;上記第1本体のスライド動作を制御するために駆動部の駆動を制御する駆動制御部;を含み、第2本体にその一端が固定された上記動力伝達部の回転制限及び上記一対の部材の選択的噛合により上記駆動部が固定された上記ハウジングが回転し、上記ハウジングの回転により上記第1駆動手段と第2駆動手段とが接触しスライド動作が行われるスライド型移動通信端末機を提供する。
【0022】
好ましくは、上記動力伝達部は上記駆動部の回転軸に連結され駆動部の駆動力を伝達するヒンジーシャフト;上記ヒンジーシャフトと選択的に係合するスライドカム;上記スライドカムを収容するガイドカム;及び、上記ヒンジーシャフトと上記スライドカムとを選択的に係合させる弾性力を与える弾性手段;を含み、上記一対の部材は上記ヒンジーシャフト及び上記スライドカムから成るスライド型移動通信端末機を提供する。
【0023】
本明細書及び特許請求範囲においては接触によりスライドされる本体を第1本体、ハウジングを収容する本体を第2本体と定義し、ハウジングの収容当否により上部本体が第1本体または第2本体となり得ることを明かしておく。
【発明の効果】
【0024】
本発明によるスライド型移動通信端末機はモータ、選択的に係合する一対の部材、駆動手段、及びセンサ部を設けることにより自動/半自動/手動動作が全て可能で、端末機をより容易且つスムーズに開閉できる効果を奏する。
【0025】
また、本発明によると手動動作時弾性手段を利用することにより端末機をよりスムーズに開閉できるばかりでなく原点復帰が可能な効果を奏する。
【0026】
とりわけ、センサ部を設けることにより自動または半自動動作時本体の完全開閉が行えるようにでき、外力が作用して完全開閉が遂げられないと自動で展伸及び縮退動作を完了できる効果を奏する。
【0027】
また、本発明によると構造が簡単で、部品がハウジングモジュールで提供されるので組立性に優れ、とりわけ第1駆動手段が回転バーの場合にはスライド装置を本体内部に装着し美観に優れる効果を奏する。
【発明を実施するための最良の形態】
【0028】
以下、添付の図に基づき本発明の好ましき実施例をより詳しく説明すれば次のとおりである。
【0029】
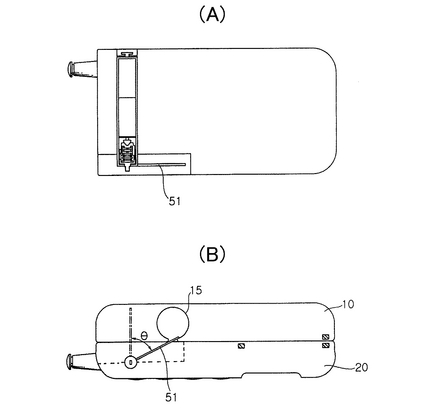
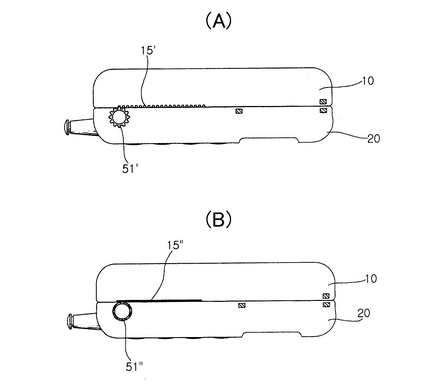
図3は本発明によるスライド型移動通信端末機の主要部品の斜視図で、図4A及び図4Bは夫々自動/半自動及び手動スライド動作の説明図を示す。また、図5A及び図5Bは夫々本発明によるスライド型移動通信端末機の主要部品の装着状態の一実施例を示す平面図と側面図で、図6A及び図6Bは夫々本発明によるスライド型移動通信端末機の主要部品の装着状態の他実施例を示す側面図である。
【0030】
先ず、本発明によるスライド型移動通信端末機は駆動部(31)、上記駆動部の回転軸に連結され駆動部の駆動力を伝達し、弾性手段により選択的に係合する 一対の部材を駆動する動力伝達部(40)、上記動力伝達部を収容するハウジング(50)、上記ハウジングに固定された第1駆動手段(51)、上記第1駆動手段と接触する第2駆動手段(15)を含む。
【0031】
また、本発明によるスライド型移動通信端末機は上記第1本体のスライド動作を制御するために駆動部の駆動を制御する駆動制御部(図示せず)を含む。
【0032】
図3に示すように、駆動部(31)は移動通信端末機に設けられたバッテリーから電源を供給してもらい自動または半自動のスライド動作に動力を供給する役目を果たし、駆動部のケースはハウジングに固定されハウジングと一体で回転する。
【0033】
好ましくは、上記駆動部(31)はモータから成り、上記モータ(31)は出力側にギアボックス(32)を設けたギャードモータが使用されることができる。上記ギアボックスは駆動トルクが増幅されるよう約500〜600:1の一定の減速比を有する油性ギア型減速機が設けられることができ、減速機能と逆転防止の役目を同時に果たす。
【0034】
一方、図3に示すように、動力伝達部(40)は上記モータの回転軸に固定されたヒンジーシャフト(41)、上記ヒンジーシャフトと選択的に係合するスライドカム(42)、上記スライドカムを収容するガイドカム(44)、及び上記スライドカムとガイドカムとを選択的に係合させるよう弾性力を与える弾性手段(43)を含む。
【0035】
ここで、上記ヒンジーシャフト(41)は上記モータ(またはギャードモータ)の回転軸に固定され、モータの駆動時モータと相対回転を行うようになる。即ち、モータが駆動される際ヒンジーシャフトの回転が制限されるとモータ自体が回転するようになる。
【0036】
上記スライドカム(42)は上記弾性手段(43)の弾性力により上記ヒンジーシャフトと選択的に係合するようになる。
【0037】
好ましくは、後述するように回転バーを使用すると180度回転によりスライド動作が完了するので、上記ヒンジーシャフトと上記スライドカムとは180度ごとに係合する。
【0038】
図3に示すように、上記ヒンジーシャフト(41)はテーパーを有する突起(41')が形成され雄型カムとして作用し、上記スライドカム(42)は上記雄型カムの突起(41')に対応する溝(42')が一側に形成され雌型カムとして作用する。
【0039】
これとは逆に、上記ガイドカムを雄型カムに、上記ヒンジーシャフトを雌型カムに形成することもできる。
【0040】
上記ガイドカム(44)は上記スライドカムを回転方向には相対的に拘束し、軸方向には移動可能に収容する。
【0041】
即ち、図3に示すように上記ガイドカム(44)は周縁部にキー溝(key groove、44')が形成され、ここに上記スライドカム(42)がキー固定されるようにする。これにより上記スライドカム(42)は、回転方向には上記ガイドカム(44)に固定され上記ガイドカムの回転時共に回転し、軸方向には上記キー溝(44')の長さだけ移動できるのである。
【0042】
また、上記ガイドカム(44)の一端に設けられた突出部(45)は図4のようにハウジングに形成された貫通孔を通過して第2本体に固定されるので、上記ガイドカム及びこれに収容されたスライドカムの回転が制限さえる。
【0043】
上記弾性手段(43)は上記スライドカムとガイドカムとが選択的に係合するよう機能する。即ち、上記弾性手段は上記スライドカム(42)と上記ガイドカム(44)間に位置し上記スライドカムを上記ヒンジーシャフト(41)側に加圧する機能を果たし、こうした機能を行うために圧縮コイルスプリングであることが好ましい。
【0044】
好ましくは、上記弾性手段(43)は上記モータの駆動力よりは大きく外力よりは小さい弾性力を有するよう形成され、自動/半自動スライドの場合には図4Aのように膨張され上記スライドカム(42)と上記ヒンジーシャフト(41)とが係合するようにし結果としてモータ自体が回転するようにし、外力による手動スライドの場合には図4Bのように圧縮され上記ヒンジーシャフト(41)と上記スライドカム(42)との係合が解除されるようにする。
【0045】
より好ましくは、後述するように上記弾性手段(43)は第1駆動手段に回転バー(51)を使用する場合、回転バー(51)がスライド面と垂直の時最大圧縮状態にあり、上記第2本体が完全に展伸した状態または完全に縮退した状態の場合にもやや圧縮された状態であるようにすることができ、これによって第1本体に作用するわずかな外力によって開閉動作が開始されることを防止し、端末機を安定的に使用できるようにする効果がある。
【0046】
図4に示すようにハウジング(50)は上記モータ(31)及び上記動力伝達部(40)を収容する。この際、モータ(31)は上記ハウジングの内面に固定されるのでハウジングと共に回転することになり、上記ガイドカム(44)は上記ハウジングと相対回転できるよう形成される。
【0047】
即ち、上記ハウジング(50)は自動または半自動動作の場合、その内部に固定されたモータ(31)の駆動力により回動し、手動動作の場合第1駆動手段に与えられる外力により回動する。
【0048】
また、図3に示すように、第1駆動手段は上記ハウジング(50)の円周面一側に固定され、上記ハウジングの回動に応じて第2駆動手段と接触しながら第1本体をスライドさせる。
【0049】
好ましくは、図3及び図5Bのように、上記第1駆動手段は上記ハウジングの円周面一側に上記ハウジングの回転軸と垂直に固定され、上記ハウジングの回動に応じて第1本体をスライドさせる回転バー(51)で、上記第2駆動手段は上記第1本体の内部に形成され上記回転バーと連続的に接触するガイド面(15)である。
【0050】
ここで、上記ガイド面(15)は図5Bのように上記回転バー(51)と接触によりスライドするよう第1本体(10)の内部に形成され、上記ガイド面(15)と回転バー(51)との接触により第1本体がスライドする。
【0051】
また、上記ガイド面(15)は回転バー(51)がガイド面とスムーズに接触され続けるよう滑らかな曲面の形状に形成される。
【0052】
さらに好ましくは、図3及び図6Aに示すように、上記第1駆動手段は上記ハウジングの円周面一側に固定され、上記ハウジングの回動に応じて第1本体をスライドさせるピニオン(51')で、上記第2駆動手段は上記第1本体の背面に上記ピニオンと対応して形成され上記ピニオンと接触するラック(15')であることができる。
【0053】
さらに好ましくは、図3及び図6Bに示すように、上記第1駆動手段は上記ハウジングの円周面一側に固定され、上記ハウジングの回動に応じて第1本体をスライドさせる摩擦車(51")で、上記第2駆動手段は上記第1本体の背面に上記摩擦車と対応して形成され上記摩擦車と接触する摩擦面(15")であることができる。
【0054】
第2本体(20)は図4に示すように上記ハウジング(50)を回転可能に収容し、その一端に上記ガイドカムの突出部(45)が固定される。
【0055】
本発明は上記モータの作動当否及び作動方向を入力する開閉動作スイッチ(図示せず)に入力された信号に応じて上記モータを制御する駆動制御部(図示せず)を含むことができる。
【0056】
上記開閉動作スイッチは自動スライド動作に使用され、使用者の操作に応じて駆動手段を作動させるものであって、使用者がスイッチを操作するとモータ(31)に所定の電気信号を出力するよう構成される。こうしたスイッチは本体の一側面に通常オン/オフスイッチの形で設けられるが、移動通信端末機の形状や容易な操作位置に応じて様々な形態で提供されることができよう。ここで、上記開閉動作スイッチは自動スライド動作の具現のための専用スイッチであることができるが、他機能を兼ねたボタンを使用することもできる。
【0057】
また、上記スイッチの操作に応じて第2本体が閉じられた状態においては第2本体が開かれるよう、第2本体が開かれた状態においては第2本体が閉じられるよう駆動手段の正逆作動が制御される。
【0058】
上記駆動制御部(図示せず)は自動または半自動のスライド動作制御に使用され、上記開閉動作スイッチまたは後述するセンサ部の信号によりモータの駆動を制御する。
【0059】
このようなスライド型移動通信端末機は安定したスライド動作のためにスライドを案内するガイドと、上記ガイドに沿って往復スライド運動するスライドを含むスライドモジュールを具備する。
【0060】
上記のような構成を有する本発明によるとスライド装置が本体内部に装着されるので、美観に優れるばかりでなく、諸部品がハウジングに収容もしくは装着されたハウジングモジュールで提供され組立てが容易な効果も奏する。
【0061】
好ましくは、本発明は上記第1本体(10)のスライド動作を制御するためのセンサ部をさらに含み、上記駆動制御部は上記センサ部の信号により上記モータ(31)の駆動を制御する。
【0062】
さらに好ましくは、上記センサ部は第1本体と第2本体との相対位置(完全伸展及び完全縮退)を直接感知するセンサを設けることもでき、モータに対するヒンジーシャフト特定部分の回転を感知するセンサを設けることもできる。
【0063】
この際、使用者の選択により自動/手動及び自動/半自動モードを全て具現するためには上記センサを全て設けることが好ましい。このことに係わり、図面に基づき具体的に説明する。
【0064】
先ず、第1本体と第2本体との相対位置(完全伸展及び完全縮退)を直接感知することによりスライド動作の完了を認識するセンサ部について説明する。
【0065】
図7A及び図7Bは夫々スライド動作が完了するとこれを感知する位置感知手段が設けられたスライド型移動通信端末機の完全縮退状態と完全伸展状態を示す説明図である。
【0066】
スライド型移動通信端末機は自動または半自動の駆動のために駆動モータを駆動する方法を用い、この際駆動モータを展伸及び縮退位置まで正確に駆動させることが必要となる。このため、本発明においては図7に示すセンサ部を用いる。
【0067】
上記センサ部は第1本体または第2本体に設けられた位置感知用ターゲット(62)及び上記位置感知用ターゲットと対向した本体に少なくとも2つ以上設けられる位置感知手段(61、61')を含む。
【0068】
この際、上記位置感知手段(61、61')はスイッチングにより上記位置感知用ターゲット(62)の位置を感知することによりスライド動作の完了を認識する。
【0069】
即ち、上記位置感知手段(61、61')及び位置感知用ターゲット(62)をモータ(31)の駆動を制御する駆動制御部の制御回路(図示せず)に電気的に連結させ、スライド完了が感知されると駆動制御部が自動でモータ(31)の駆動を中断させることによりスライド動作が自動終了するようにさせられる。
【0070】
この際、上記少なくとも2つから成る感知手段(61、61')中両終端のものは第1本体(10)の展伸及び縮退時の移動距離(h)、即ち駆動ストローク(stroke)だけ離隔するよう配列される。即ち、図7において第1本体下端の位置感知手段(61)は第1本体の完全縮退位置において上記位置感知用ターゲット(62)を感知できる位置に装着され、第1本体上端の感知手段(61')は第1本体の完全伸展位置において上記位置感知用ターゲット (62)を感知できる位置に装着される。
【0071】
好ましくは、上記位置感知手段(61、61')は上記位置感知用ターゲット(62)と接触するとスイッチングされる接触式センサから成り、上記センサのスイッチングにより上記第1本体のスライド動作の完了を感知することができる。
【0072】
さらに好ましくは、上記位置感知手段(61、61')は加圧によりスイッチングされるスイッチ端子で、上記位置感知用ターゲット(62)は上記スイッチ端子と対応して設けられ、第1本体のスライド動作が完了すると上記スイッチ端子を加圧しスイッチングさせる微細な突起形状の接触端子であることができる。
【0073】
さらに好ましくは、上記位置感知手段は上記位置感知用ターゲットと接触しなくても対向さえすればスイッチングされる非接触式センサから成り、上記センサのスイッチングにより上記第1本体のスライド動作の完了を感知することができる。
【0074】
ここで、位置感知手段(61、61')を非接触式センサで構成する場合、第1本体(10)の位置感知手段は磁場が検出されるとスイッチングされる感知センサから成り、第2本体(20)の位置感知用ターゲット(62)は磁場を発するマグネットから成らなければならない。この際、上記感知センサはHall ICから成るホールセンサ、磁気抵抗効果素子(MR素子)を使用したセンサなどあらゆる種類のものが可能となる。
【0075】
先述のものとは逆に、第2本体に少なくとも2個の位置感知手段(61、61')を装着し、第2本体の感知手段と対応するよう第1本体に位置感知用ターゲット(62)を装着する構造も可能であろう。
【0076】
次に、上記モータ(31)の軸に固定されたヒンジーシャフト(41)の特定部分が一定角度を回転したことを感知することによりスライド動作の制御を可能にするセンサ部について説明する。
【0077】
上記センサ部はスライド動作の完了を制御するために上記モータ(31)に対して上記ヒンジーシャフト(41)の特定部分が一定角度回転することを感知する接触式センサまたは非接触式センサを含むことができる。
【0078】
好ましくは、上記センサ部を接触式で構成する場合、上記センサ部は図4に示すように、ブラシが突出形成されたブラシハウジング(71)と、上記ブラシに対する電気的接触を通して180度毎に通電されるよう第1パターン及び第2パターンが離隔され形成された整流ハウジング(72)とで成り、上記モータ(31)の回転により上記ブラシハウジング(71)と上記整流ハウジング(72)とが相対回転するにつれて、上記ブラシハウジングのブラシにより上記整流ハウジングの第1パターン及び第2パターンが180度毎に電気的に連結され通電する際、駆動制御部に駆動止め信号を印加するようにさせられる。
【0079】
こうした第1パターンと第2パターンの形状及びブラシの個数は所望の角度毎に通電するよう多様に形成されることができる。即ち、第1パターンと第2パターンが360度の位相においてブラシにより通電するなら、2個のブラシを使用して180度毎に通電するようにさせることができる。
【0080】
また、上記センサ部を非接触式で構成する場合に、上記センサ部は磁場が感知されるとスイッチングされる感知センサ及び上記感知センサと対応するよう設けられ磁場を発するマグネットから成り、上記モータの回転により上記感知センサと上記マグネットとが相対回転するにつれて、上記感知センサと上記マグネットとが接触しなくても対向し180度毎にスイッチングされる際、駆動制御部に 駆動止め信号を印加するようにさせられる。
【0081】
ここで、感知センサは先述したようにHall ICから成るホールセンサ、磁気抵抗効果素子(MR素子)を使用したセンサなどあらゆる種類のものを用いることができる。
【0082】
このような接触式センサまたは非接触式センサはモータの一側面及びこれに対向するヒンジーシャフトの一端に設けることもでき、ヒンジーシャフトのテーパー面及びこれに対向するハウジング内面に設けることもできる。
【0083】
このようにヒンジーシャフトの特定部分が180度を回転したことを感知するセンサは第1駆動手段?回転バー(51)である場合に有利で、第1駆動手段がピニオン(51')または摩擦車(51")である場合には第2本体の完全開閉に必要な特定回転角度を感知するセンサを使用すれば良いであろう。
【0084】
上記のように構成された本発明によるスライド型移動通信端末機は使用者の選択に応じて自動/半自動または自動/手動作動が行える。即ち、後述するように半自動と手動動作の初期状態は同一なので、使用者が半自動または手動動作のうち所望の作動モードを選択することにより半自動または手動の駆動モードが決まる。以下においては、第1駆動手段が回転バー(51)である場合について説明する。
【0085】
先ず、図4A及び図7に基づき本発明による自動スライドの原理を説明する。
使用者が第2本体(20)の縮退状態において上記開閉動作スイッチ(図示せず)を押すと、駆動制御部(図示せず)は現状態が展伸状態か縮退状態かを確認した後上記スイッチから入力された信号に応じて第2本体が開かれる方向に上記モータ(31)が回転する。もちろん、第2本体が開かれた状態においては逆方向に作動する。
【0086】
こうした縮退または展伸状態の判断は端末機自体に内蔵された回路または図7に示すように完全縮退及び完全伸展を感知するセンサ部を利用してモータの駆動方向を決定することもできる。
【0087】
図4Aに示すように、ガイドカム(44)の突出部(45)は第2本体に固定されるのでガイドカム及びこれに収容されたスライドカム(42)の回転は制限される。また、弾性手段(43)の弾性力はモータの駆動により与えられる力より大きいので、上記弾性手段(43)はモータの駆動により圧縮されずスライドカム(42)とヒンジーシャフト(41)の係合状態が維持される。
【0088】
したがって、上記スライドカムとヒンジーシャフトとが係合しヒンジーシャフト(41)の回転も制限されるので、モータが駆動されるとモータ自体が回転するしかなく、上記モータ(31)が固定されるハウジング(50)が回転し、これにより上記ハウジングに連結された回転バー(51)が回転することになる。
【0089】
このように回転バー(51)が回転すると、回転バーと第1本体(10)のガイド面(15)との接触により第1本体がスライドする。
【0090】
第1本体が完全に展伸しスライド動作が完了したことは先述したセンサ部中一つを利用し感知することができる。
【0091】
即ち、ヒンジーシャフト(41)とモータ(31)との相対回転を感知するセンサを利用する場合には上記ヒンジーシャフトの特定部分が一定角度を回転してスイッチングされると第1本体のスライド動作の完了が感知され、第2本体の完全縮退または完全伸展を感知するセンサを利用する場合にはスライド動作の完了は位置感知手段(61')と位置感知用ターゲット(62)のスイッチングにより感知される。
【0092】
この際、駆動制御部は上記センサ部の信号によりモータ(31)に駆動止め信号を印加し、これによりスライド動作が完了する。
【0093】
これとは逆に、第2本体が展伸された状態から縮退された状態への自動スライド動作も上記と同様な原理により行われる。
【0094】
本発明によるとこうした自動スライド動作を具現することにより、ピニオンとラックのみで上部本体をスライドさせられる従来の移動通信端末機に比して、自動でより容易且つスムーズに端末機を開閉させられる利点がある。
【0095】
また、本発明は使用者の選択により半自動動作が可能である。この際は、図7に示すように第1本体と第2本体との相対位置を直接感知してスライド動作の完了を認識するために位置感知手段(61、61')及び位置感知用ターゲット(62)を設けたセンサを利用する。
【0096】
使用者が第2本体(20)を展伸するために第1本体(10)をスライドさせる場合、図7Aに示した位置感知手段(61)と位置感知用ターゲット(62)のスイッチングが解除されOFF(LOW)信号を発生する。
【0097】
この際、駆動制御部は上記OFF信号を認識し、モータ(31)を第2本体が展伸する方向に駆動させるようになり、以後のスライド動作は先述した自動動作の場合と同じである。
【0098】
一方、開きスライド動作中、図7Bに示す位置感知手段(61')と位置感知用ターゲット(62)がスイッチングされるとON(HIGH)信号が発生し、モータの駆動が止まって半自動のスライド動作が終結する。
【0099】
使用者が第2本体(20)を縮退するために第1本体をスライドさせる場合にも上記と同様な原理で作動する。
【0100】
また、本発明は使用者の選択によって手動動作も可能である。
図4に基づき本発明による手動動作を説明すれば次のとおりである。
【0101】
例えば、使用者が縮退状態から展伸方向へ第1本体(10)をスライドさせると、第1本体(10)のガイド面(15)と回転バー(51)との接触により回転バーに外力が与えられるようになる。上記回転バー(51)が回転すると回転バーが固定されたハウジング(50)及び上記ハウジングに固定されたモータ(31)本体が回転するようになる。
【0102】
この際、ギャードモータ(31)は駆動されなければ回転しないのでヒンジーシャフト(41)はモータ本体と一体に回転するようになる。
【0103】
また、先述したように第2本体に固定されたガイドカム(44)及びスライドカム(42)の回転は制限されるので、結局モータ本体及びヒンジーシャフトの回転によりヒンジーシャフトがスライドカムを図4Bの矢印方向にスライドさせるようになる。
【0104】
したがって、弾性手段(43)が圧縮しながらヒンジーシャフトとスライドカムとの係合が解除され第1本体のスライド動作が可能となる。
【0105】
即ち、手動動作時はスライドカム(42)の回転が制限されるが、上記ヒンジーシャフト(41)はモータ本体と共に回転しながらスライドカムを軸方向に押し出すので、上記弾性手段(43)が圧縮されながら上記のように位置ずれが発生するのである。
【0106】
ここで、位置ずれは上記ヒンジーシャフト(41)とスライドカム(42)との係合が解除された状態を意味するもので、回転バー(51)がスライド面に垂直である場合位置ずれは90度となり、後述するように小さい外力に対抗するために完全縮退または完全伸展状態でも多少位置ずれは存在する。
【0107】
もし位置ずれが90度以下であれば、第1本体(10)は上記弾性手段(43)の復元力により原点に、即ち縮退状態に復帰するようになり、90度以上であれば上記弾性手段(41)の復元力により展伸状態で最後まで移送される。
【0108】
したがって、本発明によると一度の外力で完全開閉の手動動作が行われ、従来に比してより容易且つスムーズに開閉させることができる。
【0109】
このように本発明は手動動作も可能で、とりわけ動力伝達部の構造により従来に比してよりスムーズに端末機を開閉させられ、上記弾性手段の復元力などを利用して原点復帰させられる利点を奏する。
【0110】
また、本発明は自動または半自動動作中スライドを妨げる外力が与えられると自動で原点復帰できる。
【0111】
このように、外部から外力が作用して第2本体が完全に展伸しなくなる場合はモータに電源が供給され続けバッテリーが早く消耗されてしまう問題が生じ、駆動システムの過負荷による故障が起こりかねない問題がある。
【0112】
先述したように自動または半自動動作はヒンジーシャフト(41)とスライドカム(42)とが係合した状態において行われ、モータ(31)の駆動により回転バー(51)と第1本体のガイド面(15)とが接触し行われる。
【0113】
この際、第1本体のスライドを妨げる外力が与えられると回転バーは回転できないがモータは駆動され続ける状態なので、結局モータは過負荷状態となりヒンジーシャフト(41)がスライドカム(42)を押し出し係合が解除される。
【0114】
このように係合が解除されると、ヒンジーシャフトの特定部分が180度を回転することを感知するセンサ部を用いれば、係合が解除された状態なのでヒンジーシャフト(41)が回転するようになり、センサのスイッチングが行われスライド動作が完了する。この際、上記ヒンジーシャフトとスライドカムが位置ずれしていても手動動作におけるように原点復帰(完全伸展または完全縮退状態にスライド進行)が行われるようになる。
【0115】
しかし、本体の完全伸展及び完全縮退を感知する位置感知手段(61、61')と位置感知用ターゲット(62)を設けたセンサ部によりスライド動作の完了を感知する場合には、センサ部がスライド動作の完了を感知しないのでモータの駆動が続く。また、ヒンジーシャフトの特定部分の回転を感知するセンサ部を使用する場合であっても係合の解除に充分でない小さい外力が作用する場合にはセンサ部がスライド動作の完了を感知できないこともある。
【0116】
このように、センサ部がスライド動作の完了を感知できなければ一定時間(s)が経過した場合モータに駆動止め信号を印加してモータの駆動を止めることができ、このようにモータの駆動を止めると手動動作のように位置ずれが起こる。
【0117】
この際、位置ずれが90度以下であると、第1本体(10)は上記弾性手段(43)の復元力により原点に、即ち縮退状態に復帰し、90度以上であれば上記弾性手段(41)の復元力により展伸状態で最後まで移送されるであろう。
【0118】
ここで、一定時間(s)とは外力の無い状態においてスライド動作が完了する時間の1.5倍ないし2倍とすることが好ましい。
【0119】
このように、自動または半自動のスライド動作中外力が作用する場合、駆動制御部においてモータの駆動を止めると、上記弾性手段の復元力により原点復帰が可能である。
【0120】
一方、スライド動作の開示から完了までヒンジーシャフト(41)はモータに対して180度を回転するのに比して、回転バー(51)は180度より小さい角度を回転するようになる。
【0121】
ここで、弾性手段(43)は上記回転バー(51)がスライド面と垂直である場合最大の圧縮状態となるよう設定されるので、例えば回転バー(51)の回転角が150度であれば完全伸展または完全縮退状態では15度の位置ずれが生じ弾性手段に圧縮力が残るようになる。
【0122】
こうした残りの圧縮力は第1本体に作用するわずかな外力により開閉動作が開始されることを防止するので、端末機を安定的に使用できるようなる。
【0123】
一方、第1駆動手段がピニオン(51')または摩擦車(51")の場合、自動または半自動動作を具現するためにはヒンジーシャフトの特定部分が180度以上回転することが要求される。したがって、ヒンジーシャフトの特定部分が第1本体の完全開閉のために必要な角度だけ回転することを感知するセンサ部を使用すればよいであろう。
【0124】
また、上記ヒンジーシャフトの特定部分が180度以上回転することが要求されるので、上記ヒンジーシャフトと上記ガイドカムとは360度毎に係合するようにさせることが好ましく、この際は手動動作及び原点復帰の基準は180度となるであろう。
【0125】
本発明は特定の実施例に係わり図示し説明したが、当業界において通常の知識を有する者であれば、添付の特許請求範囲に記載された本発明の思想及び領域を外れない範囲内において本発明を多様に修正及び変更させられることを明かしておく。
【図面の簡単な説明】
【0126】
【図1】従来のスライド型移動通信端末機の概略図である。
【図2】従来の自動スライド型移動通信端末機の概略図である。
【図3】本発明によるスライド型移動通信端末機の主要部品の分解斜視図である。
【図4】A及びBは本発明によるスライド型移動通信端末機の自動/半自動/手動動作の原理を示す断面図である。
【図5】A及びBは夫々本発明によるスライド型移動通信端末機の主要部品の装着状態の一実施例を示す平面図及び側面図である。
【図6】A及びBは夫々本発明によるスライド型移動通信端末機の主要部品の装着状態の他実施例を示す側面図である。
【図7】A及びBは夫々本発明による第1本体と第2本体との相対位置を感知する位置感知手段を付着した自動スライド型移動通信端末機の完全縮退及び完全伸展状態を説明する説明図である。
【符号の説明】
【0127】
10 第1本体
20 第2本体
31 駆動部
41 ヒンジーシャフト
40 動力伝達部
42 スライドカム
44 ガイドカム
50 ハウジング
51 回転バー
【特許請求の範囲】
【請求項1】
重なり合う第1本体と第2本体とが相互スライドするスライド開閉式通信端末機において、
スライド開閉動作に必要な駆動力を供給する駆動部;
一側は上記駆動部の回転軸に軸方向に連結され他側は上記第2本体に固定され、弾性手段により選択的に係合する一対の部材を通して上記駆動部の駆動力または外力を伝達するか伝達してもらう動力伝達部;
上記動力伝達部を内部に収容し、その回転軸が上記駆動部の回転軸と一致するよう上記駆動部を内部に固定し、上記第2本体に回転可能に収容される円筒形のハウジング;
上記ハウジングの一側に固定され上記ハウジングの回転により上記第1本体をスライドさせる第1駆動手段;
上記第1本体に収容され、上記第1駆動手段と接触して上記第1駆動手段の回転動作を上記第1本体のスライド動作に変換させる第2駆動手段;
上記第1本体のスライド動作を制御するために駆動部の駆動を制御する駆動制御部;を含み、
上記第2本体にその一端が固定された上記動力伝達部の回転制限及び上記一対の部材の選択的係合により上記駆動部が固定された上記ハウジングが回転し、
上記ハウジングの回転により上記第1駆動手段と第2駆動手段とが接触してスライド動作が行われるスライド型移動通信端末機。
【請求項2】
上記駆動部は駆動トルクを増幅させるためにギアボックスを設けたギャードモータであることを特徴とする請求項1に記載のスライド型移動通信端末機。
【請求項3】
上記動力伝達部は上記駆動部の回転軸に連結され駆動部の駆動力を伝達するヒンジーシャフト;
上記ヒンジーシャフトと一定角度毎に選択的に係合するスライドカム;
上記スライドカムを収容するガイドカム;及び、
上記ヒンジーシャフトと上記スライドカムとが選択的に係合するようにさせる弾性力を提供する弾性手段;を含み、
上記一対の部材は上記ヒンジーシャフト及び上記スライドカムから成ることを特徴とする請求項1に記載のスライド型移動通信端末機。
【請求項4】
上記ガイドカムはその一端が上記ハウジングに形成された貫通孔を通して上記第2本体に固定され、上記スライドカムを回転方向には相対的に拘束し軸方向には移動可能に収容することを特徴とする請求項3に記載のスライド型移動通信端末機。
【請求項5】
上記弾性手段は上記スライドカムと上記ガイドカム間に位置し、上記スライドカムを上記ヒンジーシャフト側に加圧することを特徴とする請求項3に記載のスライド型移動通信端末機。
【請求項6】
上記ヒンジーシャフトと上記スライドカムとは180度毎に係合することを特徴とする請求項3に記載のスライド型移動通信端末機。
【請求項7】
上記ハウジングは自動または半自動動作の場合上記一対の部材が係合してその内部に固定された駆動部の駆動力により回動し、手動動作の場合上記一対の部材の係合が解除され第1駆動手段に与えられる外力によって回動することを特徴とする請求項1に記載のスライド型移動通信端末機。
【請求項8】
上記第1駆動手段は上記ハウジングの円周面一側に上記ハウジングの回転軸と垂直に固定され上記ハウジングの回動に応じて第1本体をスライドさせる回転バーで、
上記第2駆動手段は上記第1本体の内部に形成され上記回転バーと連続的に接触するガイド面であることを特徴とする請求項1に記載のスライド型移動通信端末機。
【請求項9】
上記第1駆動手段は上記ハウジングの円周面一側に固定され上記ハウジングの回動に応じて第1本体をスライドさせるピニオンで、
上記第2駆動手段は上記第1本体の背面に上記ピニオンと対応して形成され上記ピニオンと接触するラックであることを特徴とする請求項1に記載のスライド型移動通信端末機。
【請求項10】
上記 第1駆動手段は上記ハウジングの円周面一側に固定され上記ハウジングの回動に応じて第1本体をスライドさせる摩擦車で、
上記第2駆動手段は上記第1本体の背面に上記摩擦車と対応して形成され上記摩擦車と接触する摩擦面であることを特徴とする請求項1に記載のスライド型移動通信端末機。
【請求項11】
上記駆動制御部は、
第1本体または第2本体に設けられた位置感知用ターゲット;及び、
上記位置感知用ターゲットと対向した本体に少なくとも2以上設けられ、上記位置感知用ターゲットの位置を感知することによりスライド動作の完了を認識する位置感知手段;を含むセンサ部の信号により駆動部の駆動を制御し、
上記位置感知手段は第1本体のスライド距離だけ離隔し位置することを特徴とする請求項1に記載のスライド型移動通信端末機。
【請求項12】
上記位置感知手段は上記位置感知用ターゲットと接触するとスイッチングされる接触式センサから成り、上記センサのスイッチングにより上記第1本体のスライド動作の完了を感知することを特徴とする請求項11に記載のスライド型移動通信端末機。
【請求項13】
上記位置感知手段は上記位置感知用ターゲットと接触しなくても対向すればスイッチングされる非接触式センサから成り、上記センサのスイッチングにより上記第1本体のスライド動作の完了を感知することを特徴とする請求項11に記載のスライド型移動通信端末機。
【請求項14】
上記位置感知手段が一定時間(s)に亘って上記位置感知用ターゲットを感知できなければ、駆動部に駆動止め信号を印加することを特徴とする請求項11に記載のスライド型移動通信端末機。
【請求項15】
上記駆動制御部はスライド動作の完了を制御するために上記駆動部に対して上記ヒンジーシャフトの特定部分が予め定められた角度を回転することを感知する接触式センサまたは非接触式センサを含むセンサ部の信号により駆動部の駆動を制御することを特徴とする請求項1に記載のスライド型移動通信端末機。
【請求項16】
上記センサ部はブラシが突出形成されたブラシハウジング;並びに、上記ブラシに対する電気的接触を通して予め定められた角度毎に通電するよう第1パターン及び第2パターンが離隔し形成された整流ハウジング;から成り、
上記駆動部の回転により上記ブラシハウジングと上記整流ハウジングとが相対回転するにつれて、上記ブラシハウジングのブラシにより上記整流ハウジングの第1パターン及び第2パターンが予め定められた角度ごとに電気的に連結され通電する際、駆動制御部に駆動止め信号を印加することを特徴とする請求項15に記載のスライド型移動通信端末機。
【請求項17】
上記センサ部は磁場が感知されるとスイッチングされる感知センサ;及び、上記感知センサと対応するよう設けられ磁場を発するマグネット;から成り、
上記駆動部の回転により上記感知センサと上記マグネットとが相対回転するにつれて、上記感知センサと上記マグネットとが接触しなくても対向して予め定められた角度ごとにスイッチングされる際駆動制御部に駆動止め信号を印加することを特徴とする請求項15に記載のスライド型移動通信端末機。
【請求項18】
上記センサ部が一定時間(s)に亘って上記ヒンジーシャフトの特定部分が予め定められた角度を回転することを感知できなければ、駆動部に駆動止め信号を印加することを特徴とする請求項15に記載のスライド型移動通信端末機。
【請求項19】
上記駆動制御部は、
第1本体または第2本体に設けられた位置感知用ターゲット;
上記位置感知用ターゲットと対向した本体に少なくとも2つ以上設けられ、上記位置感知用ターゲットの位置を感知することによりスライド動作の完了を認識する位置感知手段;及び、
スライド動作の完了を制御するために上記駆動部に対して上記ヒンジーシャフトの特定部分が予め定められた角度を回転することを感知するセンサ;
を全て含むセンサー部の信号により駆動部の駆動を制御することを特徴とする請求項1に記載のスライド型移動通信端末機。
【請求項1】
重なり合う第1本体と第2本体とが相互スライドするスライド開閉式通信端末機において、
スライド開閉動作に必要な駆動力を供給する駆動部;
一側は上記駆動部の回転軸に軸方向に連結され他側は上記第2本体に固定され、弾性手段により選択的に係合する一対の部材を通して上記駆動部の駆動力または外力を伝達するか伝達してもらう動力伝達部;
上記動力伝達部を内部に収容し、その回転軸が上記駆動部の回転軸と一致するよう上記駆動部を内部に固定し、上記第2本体に回転可能に収容される円筒形のハウジング;
上記ハウジングの一側に固定され上記ハウジングの回転により上記第1本体をスライドさせる第1駆動手段;
上記第1本体に収容され、上記第1駆動手段と接触して上記第1駆動手段の回転動作を上記第1本体のスライド動作に変換させる第2駆動手段;
上記第1本体のスライド動作を制御するために駆動部の駆動を制御する駆動制御部;を含み、
上記第2本体にその一端が固定された上記動力伝達部の回転制限及び上記一対の部材の選択的係合により上記駆動部が固定された上記ハウジングが回転し、
上記ハウジングの回転により上記第1駆動手段と第2駆動手段とが接触してスライド動作が行われるスライド型移動通信端末機。
【請求項2】
上記駆動部は駆動トルクを増幅させるためにギアボックスを設けたギャードモータであることを特徴とする請求項1に記載のスライド型移動通信端末機。
【請求項3】
上記動力伝達部は上記駆動部の回転軸に連結され駆動部の駆動力を伝達するヒンジーシャフト;
上記ヒンジーシャフトと一定角度毎に選択的に係合するスライドカム;
上記スライドカムを収容するガイドカム;及び、
上記ヒンジーシャフトと上記スライドカムとが選択的に係合するようにさせる弾性力を提供する弾性手段;を含み、
上記一対の部材は上記ヒンジーシャフト及び上記スライドカムから成ることを特徴とする請求項1に記載のスライド型移動通信端末機。
【請求項4】
上記ガイドカムはその一端が上記ハウジングに形成された貫通孔を通して上記第2本体に固定され、上記スライドカムを回転方向には相対的に拘束し軸方向には移動可能に収容することを特徴とする請求項3に記載のスライド型移動通信端末機。
【請求項5】
上記弾性手段は上記スライドカムと上記ガイドカム間に位置し、上記スライドカムを上記ヒンジーシャフト側に加圧することを特徴とする請求項3に記載のスライド型移動通信端末機。
【請求項6】
上記ヒンジーシャフトと上記スライドカムとは180度毎に係合することを特徴とする請求項3に記載のスライド型移動通信端末機。
【請求項7】
上記ハウジングは自動または半自動動作の場合上記一対の部材が係合してその内部に固定された駆動部の駆動力により回動し、手動動作の場合上記一対の部材の係合が解除され第1駆動手段に与えられる外力によって回動することを特徴とする請求項1に記載のスライド型移動通信端末機。
【請求項8】
上記第1駆動手段は上記ハウジングの円周面一側に上記ハウジングの回転軸と垂直に固定され上記ハウジングの回動に応じて第1本体をスライドさせる回転バーで、
上記第2駆動手段は上記第1本体の内部に形成され上記回転バーと連続的に接触するガイド面であることを特徴とする請求項1に記載のスライド型移動通信端末機。
【請求項9】
上記第1駆動手段は上記ハウジングの円周面一側に固定され上記ハウジングの回動に応じて第1本体をスライドさせるピニオンで、
上記第2駆動手段は上記第1本体の背面に上記ピニオンと対応して形成され上記ピニオンと接触するラックであることを特徴とする請求項1に記載のスライド型移動通信端末機。
【請求項10】
上記 第1駆動手段は上記ハウジングの円周面一側に固定され上記ハウジングの回動に応じて第1本体をスライドさせる摩擦車で、
上記第2駆動手段は上記第1本体の背面に上記摩擦車と対応して形成され上記摩擦車と接触する摩擦面であることを特徴とする請求項1に記載のスライド型移動通信端末機。
【請求項11】
上記駆動制御部は、
第1本体または第2本体に設けられた位置感知用ターゲット;及び、
上記位置感知用ターゲットと対向した本体に少なくとも2以上設けられ、上記位置感知用ターゲットの位置を感知することによりスライド動作の完了を認識する位置感知手段;を含むセンサ部の信号により駆動部の駆動を制御し、
上記位置感知手段は第1本体のスライド距離だけ離隔し位置することを特徴とする請求項1に記載のスライド型移動通信端末機。
【請求項12】
上記位置感知手段は上記位置感知用ターゲットと接触するとスイッチングされる接触式センサから成り、上記センサのスイッチングにより上記第1本体のスライド動作の完了を感知することを特徴とする請求項11に記載のスライド型移動通信端末機。
【請求項13】
上記位置感知手段は上記位置感知用ターゲットと接触しなくても対向すればスイッチングされる非接触式センサから成り、上記センサのスイッチングにより上記第1本体のスライド動作の完了を感知することを特徴とする請求項11に記載のスライド型移動通信端末機。
【請求項14】
上記位置感知手段が一定時間(s)に亘って上記位置感知用ターゲットを感知できなければ、駆動部に駆動止め信号を印加することを特徴とする請求項11に記載のスライド型移動通信端末機。
【請求項15】
上記駆動制御部はスライド動作の完了を制御するために上記駆動部に対して上記ヒンジーシャフトの特定部分が予め定められた角度を回転することを感知する接触式センサまたは非接触式センサを含むセンサ部の信号により駆動部の駆動を制御することを特徴とする請求項1に記載のスライド型移動通信端末機。
【請求項16】
上記センサ部はブラシが突出形成されたブラシハウジング;並びに、上記ブラシに対する電気的接触を通して予め定められた角度毎に通電するよう第1パターン及び第2パターンが離隔し形成された整流ハウジング;から成り、
上記駆動部の回転により上記ブラシハウジングと上記整流ハウジングとが相対回転するにつれて、上記ブラシハウジングのブラシにより上記整流ハウジングの第1パターン及び第2パターンが予め定められた角度ごとに電気的に連結され通電する際、駆動制御部に駆動止め信号を印加することを特徴とする請求項15に記載のスライド型移動通信端末機。
【請求項17】
上記センサ部は磁場が感知されるとスイッチングされる感知センサ;及び、上記感知センサと対応するよう設けられ磁場を発するマグネット;から成り、
上記駆動部の回転により上記感知センサと上記マグネットとが相対回転するにつれて、上記感知センサと上記マグネットとが接触しなくても対向して予め定められた角度ごとにスイッチングされる際駆動制御部に駆動止め信号を印加することを特徴とする請求項15に記載のスライド型移動通信端末機。
【請求項18】
上記センサ部が一定時間(s)に亘って上記ヒンジーシャフトの特定部分が予め定められた角度を回転することを感知できなければ、駆動部に駆動止め信号を印加することを特徴とする請求項15に記載のスライド型移動通信端末機。
【請求項19】
上記駆動制御部は、
第1本体または第2本体に設けられた位置感知用ターゲット;
上記位置感知用ターゲットと対向した本体に少なくとも2つ以上設けられ、上記位置感知用ターゲットの位置を感知することによりスライド動作の完了を認識する位置感知手段;及び、
スライド動作の完了を制御するために上記駆動部に対して上記ヒンジーシャフトの特定部分が予め定められた角度を回転することを感知するセンサ;
を全て含むセンサー部の信号により駆動部の駆動を制御することを特徴とする請求項1に記載のスライド型移動通信端末機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2006−14264(P2006−14264A)
【公開日】平成18年1月12日(2006.1.12)
【国際特許分類】
【出願番号】特願2004−316613(P2004−316613)
【出願日】平成16年10月29日(2004.10.29)
【出願人】(594023722)サムソン エレクトロ−メカニックス カンパニーリミテッド. (1,585)
【Fターム(参考)】
【公開日】平成18年1月12日(2006.1.12)
【国際特許分類】
【出願日】平成16年10月29日(2004.10.29)
【出願人】(594023722)サムソン エレクトロ−メカニックス カンパニーリミテッド. (1,585)
【Fターム(参考)】
[ Back to top ]