
自己供給型未来エフェメリスおよびクロック予測を備えた衛星航法受信機
【課題】ナビゲーション・システム衛星用のエフェメリスを含んだ航法メッセージを復調することが可能な完全自律型の衛星航法受信機を提供する。
【解決手段】特定の衛星ビークルに作用する加速度の力モデルを含み、受信機専用である。各SV(衛星ビークル)のエフェメリスについての単一の観測は、その対応する力モデルに各SVの軌道位置を積分することによって、今後の何日かを入力され伝搬される。それぞれのSVからの航法メッセージを直ちに得て復調することができない場合、完全自律型の衛星航法受信機は、その後、代替物として使用することができる拡張エフェメリス予測が利用可能となる。
【解決手段】特定の衛星ビークルに作用する加速度の力モデルを含み、受信機専用である。各SV(衛星ビークル)のエフェメリスについての単一の観測は、その対応する力モデルに各SVの軌道位置を積分することによって、今後の何日かを入力され伝搬される。それぞれのSVからの航法メッセージを直ちに得て復調することができない場合、完全自律型の衛星航法受信機は、その後、代替物として使用することができる拡張エフェメリス予測が利用可能となる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、航法受信機に関し、特に、全地球測位システム(GPS)の衛星軌道およびクロックの、自身の長期モデルを構築することができる受信機に関する。
【背景技術】
【0002】
全地球測位システム(GPS)用としてどこででも見つけることができるような衛星航法受信機は、受信機の位置を演算するために、追跡している各衛星の正確な軌道位置を知ることに依存している。そのようなエフェメリス情報は、単に周期的に更新され、それはあまりにも速く古くなってしまう。
【0003】
携帯電話機およびデジタル・カメラは、現在撮っている写真のユーザおよび場所に対する位置fixを提供するGPS航法受信機を普通に装備している。これらの埋込み型のGPS航法受信機は、ネットワーク・サーバから衛星エフェメリスおよびアルマナック・データをダウンロードすることができる被支援型(A-GPS)であり、従って衛星自体から情報を直接的に収集するために必要な通常の長い時間を待機する必要がない。しかし、ネットワーク接続は、特にモバイル・ユーザにとっては、100%信頼することができるものではなく、常に利用可能なわけでもない。コールド・スタートで直ちに利用可能となる衛星エフェメリスおよびアルマナック・データを有していないことは、最初のfixまでの時間が受容できないほど長くなり得ることを意味する。
【0004】
GPSシステムでは、20,200kmの高度で地球を周回する少なくとも24基の衛星が軌道上に一定間隔で配置され、その結果、ユーザが最低6基の衛星をいつでも見ることができる。そのような衛星はそれぞれ、正確な時間および位置の信号を送信している。GPS受信機は、それに達するまでの信号の時間遅れを測定し、それから見掛けの受信機・衛星間距離を演算する。少なくとも4基の衛星からのこのような測定は、GPS受信機がその三次元の位置、速度、およびシステム時刻を演算することを可能にする。見掛けの距離は、真のGPSシステム時刻からオフセットした衛星および受信機時刻の時間オフセットも含んでいる。
【0005】
受信機位置の解は、適切な衛星の各々が3次元空間のどこにあるか、および、各衛星のGPS時刻からの時間オフセットを知ることに依存している。それぞれの位置は、1組のケプラー方程式に属するパラメータとして報告される。従来のGPSシステムでは、GPSのエフェメリスは、表Iにおける項目をすべて含んでいる。
【表1】

【0006】
エフェメリス・メッセージの有効期間に、航法受信機にダウンロードされた完全なGPSエフェメリス・メッセージ情報を使用して、その飛行の任意の一瞬間のGPS時刻から、ほぼ正確な衛星の位置および速度、ならびにそのクロック(時間)オフセットを演算することが可能である。勿論、これによってGPSエフェメリス・メッセージをダウンロードすることができると考えられる。
【0007】
GPS衛星の演算された位置は、これらのパラメータの殆どの小さな変化に非常に敏感であるので、各エフェメリス・ダウンロード中に完全にそれらを通信することが必要である。しかし、2005年12月15日に発行された米国特許出願第2005/0278116A1号に記述されているように、軌道傾転角の2つの高調波補正(CicおよびCis)がそれほど致命的ではないとも報告されている。eRide社(カルフォルニア州サンフランシスコ)は、少なくとも、これらの2つのパラメータのうちの1つが零にセットされ、衛星位置の演算には使用されない「コンパクトな」衛星モデルを伝えている。解の精度は、著しく下げることができない。二次クロック時刻オフセットは、僅かなインパクトしかなく、無視することができる。
【0008】
それは、周回軌道衛星およびそれらの軌道についてすべて記述する完全なアルマナックおよびエフェメリスを収集することができるように、GPS航法受信機に最低でも12.5分間の連続運転をさせる。多くのデータがあり、この情報(navData)を転送するために使用される50Hzの変調は、非常に遅い。受信機の信号強度は、navDataの副搬送波を復調することが可能なように良好でなければならない。従って、時間の不足および/または強い信号の不足は、迅速な最初の位置fixを得ようとするユーザにフラストレーションを起こさせることがある。
【0009】
従来の受信機は、前の運用セッションにおいてアルマナック・データを格納することによってこの問題を解決する。その後、現時点で収集したエフェメリス・データは、格納されているアルマナック・データと比較され、何を更新する必要があるかを判断する。従って、より完全で更新されたアルマナックが構築され、そして、受信機自体で維持されて、将来のウォーム・スタートで即座に利用可能になる。従って、捕捉時刻を考慮した後、新しいGPSセッションの最初のfixまでの時間は、主としてエフェメリスを収集するための時間に依存する。
【0010】
ネットワーク・サーバからの従来の衛星エフェメリス・データは、より速く古くなっており、従って、A-GPS航法受信機は、少なくとも毎日、サーバに接続する必要がある。典型的な見通し線(Los)の範囲精度は、通常容認される適用可能範囲のエフェメリス時間(toe)の中心の後、4時間以内に25m以上低下する。現在、GPS衛星は、2時間毎に新しいエフェメリスを放送し、エフェメリス時間は、新しいモデルへの移行時の1時間後である。GPS衛星は、12時間の軌道を移動するので、前のセッションからのモデルの使用は、最後のセッションの後、たった5時間しか位置fixを一般には許容しない。これらのfixは、視認可能な衛星の数が3基以下に低下した場合に劣化する。携帯電話機およびカメラが使用される方法の現実性を考えると、サーバに毎日接続することは、可能でないことがあるし現実的ではないことがある。
【0011】
他の拡張支援技術も、リアルタイム支援のGPS技術を越えて発展した。頭上を飛行する衛星から受信する実際のエフェメリス情報を待機する代わりに、合成等価物が予測され、予めロードされる。そのような予測情報(つまり、「拡張エフェメリス」)は、最大1週間有効である衛星の未来のエフェメリスの推定値である。合成支援が装置上で利用可能な場合には、GPS起動時間は、サーバ処理が必要ではないので、リアルタイム支援技術と比較して著しく減少されることができる。
【0012】
2種類の拡張エフェメリス解が現在のところ標準である(ネットワークを有効にする/完全に自律する)。ネットワークを有効にする解は、予測サーバからの周期的なデータ・ダウンロードを必要とする。完全に自律する解は、ネットワーク支援を必要とせず、それら自身の衛星観測から自身の合成支援を学習し生成する。
【0013】
完全自律型の解は場合によっては不便な制限をしている、それらは、実際に見た衛星用データだけを予測することができ、近い時間隣接性を有している多数の観測を必要とすることがある。これは、拡張モデルの利用可能性が、受信機の使用頻度に依存し、従って、より大きな電力消費を必要とすることを意味している。自律モデルでは、導き出したデータは、精度があまりに低下する前の最大3日間使用可能である。ネットワークを有効にする解は、より長く、より正確な予測を提供する(場合によっては、全衛星群に対して最大10日または1週間)。
【0014】
拡張エフェメリス解は、市場で入手可能になったが、その特徴を実施した各チップセット販売者の厳格な所有物のままである。チップセット所有者のネットワーク有効解は、サーバ上の予測データを通常演算し、携帯機器に周期的にダウンロードされる。これらのサーバを基本とした予測技術は、一般に、実質的には1週間単位のデータ・ペイロード(典型的には、1つの衛星群当たり50〜80キロバイト)を課す。広帯域データの接続性に問題があるか、または、コストが高過ぎることがある用途では、そのようなオーバヘッドには、高価過ぎて手が出ない。
【0015】
必要なのは、制限付き演算能力を備え、僅かなネットワーク・アクセスを備えるかまたはネットワーク・アクセスが全くなく、そして、拡張モデルを生成するために観測されるエフェメリス近傍の時刻に特別な要求を配置しないGPS受信機によって演算することができるGPS衛星軌道およびクロックのコンパクトで長期的なモデルである。
【発明の開示】
【0016】
簡潔には、改良型の拡張エフェメリス航法受信機は、軌道上のナビゲーション・システム衛星からマイクロ波伝送を受信する完全自律型の衛星航法受信機を有し、それらのナビゲーション・システム衛星用のエフェメリスを含んだ航法メッセージを復調することができる。その改良は、特定の衛星ビークルに作用する加速度の力モデルを含んでおり、受信機専用である。力モデルは、変換モデルを必要とし、それは、地球慣性系と地球固定座標系との間の変換を可能にし、その結果、すべての力がそれらの固有座標系で積分されることができる。各SVのエフェメリスについての単一の観測は、その対応する力モデルで各SVの軌道位置を積分することによって今後の何日かを入力され伝搬される。伝搬されるデータの記憶を減少させ、受信機の処理における使用を単純化するために、生成される軌道は、サンプリングされ、GPS放送のエフェメリスと同様の長期的なケプラーのエフェメリス形式に変換され、そして、不揮発性メモリに格納される。その後、完全自律型の衛星航法受信機は、それぞれのSVからの前記航法メッセージを直ちに得て復調することができない場合に、代替物として使用することができる拡張エフェメリス予測に対して利用可能となる。
【0017】
本発明のこれらのおよび他の目的および利点は、様々な図面において図示される好ましい実施形態の次の詳細な記述を読んだ後で、当業者にとっては疑いなく明白になるであろう。
【図面の簡単な説明】
【0018】
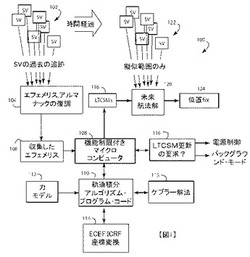
【図1】本発明の完全自律型の拡張エフェメリスGPS航法受信機の実施形態の機能ブロック図である。
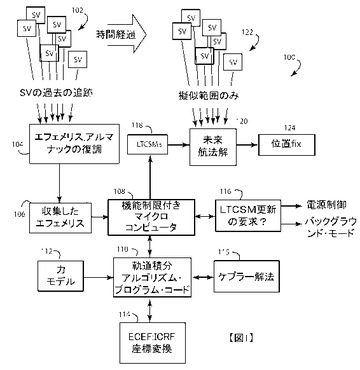
【図2】長期コンパクト衛星モデル(LTCSM: Long-term compact satellite model)の更新をサポートする様々なハードウェア・ステージに適用することができる動力制御を示す、本発明の衛星航法受信機の実施形態の機能ブロック図である。
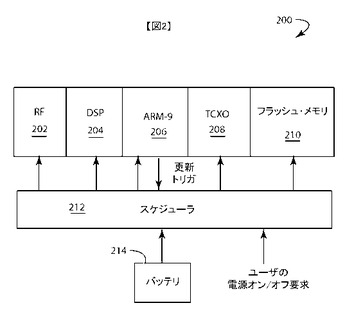
【図3】本発明の衛星航法受信機の実施形態がユーザによって必要とされ得る時間、および、LTCSMライブラリに対する更新処理をどのように予定することができるかを示すグラフである。
【発明を実施するための最良の形態】
【0019】
図1は、本発明の完全自律型の拡張エフェメリスGPS航法受信機の実施形態を表わし、ここでは一般的な参照数字100によって参照される。時間と共に、すべての軌道上のGPS衛星ビークル(SV)102のうちの、継続して変化する衛星群は、その、後に更新されるそれぞれのエフェメリスを含んだマイクロ波信号を送信する。プロセッサ104は、何日間も、また何週間も有効なものとしてそれらを含んだエフェメリスおよびアルマナックの各々を復調する。エフェメリスおよびアルマナックの完全なコレクション106は、機能制限付きマイクロコンピュータ108にその後継続して利用可能である。
【0020】
各SV102によって送信されたGPS航法メッセージは、GPS衛星位置、クロック・オフセット、および他のシステム・パラメータについて記述するパラメータを含んでいる。航法メッセージは、毎秒50ビットで送信される300ビット・シーケンスの5つのサブフレームにそれぞれ分割された25個のデータ・フレームを含んでいる。従って、サブフレームはそれぞれ6秒を必要とし、各フレームは30秒で、25個のフレームの全セットは、完全に受信するのに12.5分掛かる。サブフレーム番号1,2,および3は、完全な軌道およびクロックの記述、ならびにそれらを送信している衛星に関する他のメッセージに対してリザーブされている。サブフレーム4および5は、すべての衛星に共通のすべての衛星およびシステム・データに対する略した軌道およびクロック・データを担持している。GPS受信機は、データ・ビットを整列させ、それらをパリティ・アルゴリズムでエラーがないかチェックし、それらを特定のパラメータを表わすセットに分け、それらを測り、そのビットを数値の形式および特定の単位に変換する。例えば、メートル(m)、m2、半円、ラジアン、秒、秒/秒、秒/秒2、および週である。パラメータはそれぞれ、位置および時間の推定値を導き出すためにGPS受信機によって必要とされる基礎を提供する。必要とされる様々なアルゴリズムは、ナブスターGPS共同プログラム・オフィス(Navstar GPS Joint Program Office)のインタフェース制御に関する文献ICD-GPS-200Cで規定されている。
【0021】
通常、長期コンパクト衛星モデル(LTSCM)の演算は、2倍精度の数学コプロセッサを備えた高性能コンピュータ・プロセッサを必要とする。これは、従来の衛星力加速度モデルおよび座標変換が数秒おきに非常に正確に演算されなければならないからであり、その結果、積分誤差は、際限なく大きくなる。その演算は、すべてのSV102に対して、且つ、少なくとも1週間先について6〜12時間毎になされなければならない。従来の衛星航法受信機およびスマートフォンで使用されるプロセッサの種類は、そのような機能の能力がなく、モバイル装置は、そのような演算中に生じる高レベルのバッテリ電力使用に対して、さらに、非常に耐えることができない。
【0022】
特別軌道積分アルゴリズム・プログラム・コード110は、収集したエフェメリスの各々を未来へ投影するために、対応する力モデル112を適用する機能制限付きマイクロコンピュータ108に提供される。各SVのエフェメリスについての単一の観測だけが、対応するSV投影の各々に使用される(例えば、そのSVに対して復調および確認された最後の良好なエフェメリス)。そのようなアプローチは、演算上の負荷を減少させ、そして、さらに重要なことには、受信機がオンであり、エフェメリスを収集していなければならない時間を減少させる。そのような単一のポイント観測は、それにも拘わらず、7〜10日先まで有用であり得る高品質な拡張エフェメリス情報を提供する。これは、各SVに作用する加速力が軌道偏差の他のすべての原因を支配するからである。軌道の投影は、対応するSVが再び遭遇し、リアルタイムのエフェメリス復調が可能でない場合に、未来での使用に対してケプラーに基づく長期コンパクト衛星モデル(LTCSM)としての出力用に構成される。
【0023】
一般に、本発明の実施形態にかかる軌道積分方程式は、サーバ上で長期コンパクト衛星モデル(LTCSM)を演算するために使用されるものと類似している。しかし、幾つかの方程式は、比較的穏当な完全自律型の衛星航法受信機上で実行される演算負荷および時間を低減させるために単純化されなければならない。加えて、太陽光パネルのサイズおよび各衛星の重量などの幾つかのパラメータは、各宇宙機に対して同じであると想定され、これは、通常の航法データで利用可能ではない外部入力データを提供する必要性を低減する。
【0024】
座標変換プログラム・コード114は、機能制限付きマイクロコンピュータ108に提供される。2つの座標系が、軌道積分演算で使用される(例えば、(1)国際天文基準座標系国際天文基準座標系)(ICRF、別名ICRS)、および(2)地球中心・地球固定(ECEF)座標系(WGS-84、国際地球基準座標系(ITRF)およびITRSとしても知られている)。ICRFにおける原点は、太陽系の重心(例えば、共通重心)に配置され、その位置では、すべての太陽系体によって作用する重力が相殺される。その軸方向は「空間的に固定されて」いる。ECEF系の原点は、地球の質量中心に配置される。そのX軸は、平均赤道および平均基準子午線の交点であり、Z軸は、1900年から1905年までの間の地球の平均自転軸である。
【0025】
ECEFからICRFおよびICRFからECEFへの座標変換は、4つの四元数回転を含んでいる。四元数はそれぞれ、4つの要素を有しており、回転行列演算をすることにおいて非常に効率的である。例えば、
【数1】
ここで、
P:歳差;
N:章動、
θ:地球回転;
π:極運動であり、
上付き文字「conj」は、四元数の共役を省略したものである。
【0026】
本発明の実施形態で使用することができる4つの回転行列は、次の文献に詳細に記述されている:Oliver Montenbruck and Eberhard Gill, Satellite orbits: Models, Method, Applications, first edition 2000, p. 66, ISBN: 978-3-540-67280-7。ECEFからICRFへの変換では、4つの四元数回転は、座標変換プログラム・コード114で使用される。
【数2】
【0027】
極運動回転四元数は、地球方位パラメータ、所謂EOPに基づいている。これらのパラメータは、例えば、maia.usno.navy.mil/ser7/ser7.datでの米国海軍によって提供されるものを使用して10年間予報を使用することによって予測される(国際地球回転観測事業(IERS:International Earth Rotation and Reference Systems Service)掲示板A、地球方位の迅速な提供および予測)。EOPの不適当なモデリングは、積分期間の増加として増加的に大きな誤差を生じることがある。これらのEOPパラメータは、本来正弦関数であるが、任意に変動する位相および振幅を伴う。半周期分間違っている値の使用は、3日後に200mのオーダの誤差に結びつく場合がある。掲示板の準備に使用される寄与した観測は、www.usno.navy.mil/USNO/earth-orientation/eo-info/general/input-dataで利用可能である。寄与した分析結果は、超長基線電波干渉法(VLBI)、衛星レーザ測距(SLR)、全地球測位システム(GPS)衛星、月レーザ測距(LLR)、および大気角運動量(AAM)の変化についての気象的予測からのデータに基づいている。従って、セルフエフェメリスの精度は、EOPモデルの期待する有用性範囲の後でゆっくりと低下することがある。この場合、ユーザは、受信機のソフトウェアをリフレッシュするか、または、特別な入力コマンドを通じてEOPパラメータの新しいセットを入力することを要求することができる。前方EOP予測モデルは、10年以上有効であり、10年以降ゆっくりと低下する精度を有している。
【0028】
現在発行されているEOP変換の係数xおよびyの構造および係数は、次の通りである。
x=0.0972+0.1154cosA+0.0380sinA-0.0411cosC+0.0729sinC;
y=0.3418+0.0313cosA-0.1043sinA+0.0729cosC+0.0411sinC;
UT1-UTC=-0.0677-0.00081(MJD-55435)-(UT2-UT1);
ここでは、A=2*pi*(MJD-55427)/365.25およびC=2*pi*(MJD-55427)/435;ならびにMJDは周知の修正したユリウス日時間枠である。
【0029】
4つの加速力が、ICRF座標系で積分される(地球重力、月重力、太陽重力、および太陽放射)。これらは、3秒毎に機能制限付きマイクロコンピュータ108によって演算され、その結果は、それぞれのSV102の位置および速度を伝搬するために使用される。たとえ地球重力が明白に支配したとしても、4つの力をすべてモデル化することが重要である。しかしながら、他の力の影響も重要である。例えば、太陽放射力をモデル化しないことは、たった3日間で20〜30mの誤差を生じさせる場合がある。一方で、1秒間の積分期間は、より高い精度に結び付き、3秒間の積分期間は、精度および演算時間の最良の妥協として選ばれる。
【0030】
地球の重力による加速度を演算するために使用することができる1つの方法は、Oliver Montenbruck, Eberhard Gill, Satellite Orbits: Models, Method, Applicationsに記述されている。太陽および月の重力の演算は、ニュートンの万有引力の法則に基づくことができる。http://en.wikipedia.org/wiki/Newton%27s_law_of_universal_gravitationを参照。つまり、重量物から空間中の物体に加えられた加速度は、次のものに等しい。
a_gravity=G*M_heavy_body/r^2;
ここでは、Gは重力加速度であり、M_heavy_bodyは、太陽および月の質量である(定数でもある)。「r」は重量物と衛星との間の距離である。
【0031】
太陽および月の位置は、力モデル112および機能制限付きマイクロコンピュータ108によって10分毎に演算され、10分以内の同じ演算された位置を使用する。太陽および月の演算は重たく、従って、その演算は積分のステップ毎に繰り返されない。10分間の割合が、精度と演算時間との間のトレードオフの点から最適であると認められた。
【0032】
太陽放射もまた、例えば、Henry F. Fliegel, Thomas E. Galini, Solar Force Modeling of Block IIR Global Positioning System Satellite, Journal of Spacecraft and Rockets, Vol. 33, No. 6, p. 863-866, 1996年によって示唆されるモデルを使用して、力モデル112および機能制限付きマイクロコンピュータ108によって演算される。角度βは、太陽・地球間線とSV軌道面との間の角度として演算される(例えば、ベクトル「r」およびベクトル「r-rSun」)。
【0033】
太陽放射力は、最終加速度を得るためにSVの質量を計ることによって演算される。太陽放射は、SVの太陽光パネルの重量および面積が問題とする唯一の力である。現在使用可能なGPS衛星は2種類ある(block II-Aおよびblock II-R)。
Block II-A SV: mass=984.5kg, area=8.133m^2;
Block II-R SV: mass=1100kg, area=17.66 m^2
Block II-AのGPS衛星は、継続してBlock II-R衛星に置き換えられている。交換がそれぞれ生じたときには、そのような情報が受信機には通常利用可能にならない。しかし、実験は、Block II-Rの衛星の物理的パラメータが、受信機の位置解における重要な悪影響なしに、すべてのSV(II-Aを含む)に想定されることができることを示している。
【0034】
数値的方法が加速力をすべて積分するために使用される。時刻「T」でのICRFフレームにおける衛星状態ベクトル「r」を与えられて、「r」は、6つの成分を有している(3つは位置用、3つは速度用である)。時刻「T+dT」での状態ベクトル「r」を推定するために、ここでは、dTは、積分のステップ・サイズであり、本発明の実施形態では6秒である。6秒を選択することは、受容可能な位置精度および減少した演算時間の点から最適な性能をもたらす。
【0035】
機能制限付きマイクロコンピュータ108に提供された軌道積分アルゴリズム・プログラム・コード110は、Bulirsch-Stoer型のアルゴリズムを含んでいる(en.wikipedia.org/wiki/Bulirsch-Stoer_algorithmを参照)。
【0036】
そのようなアルゴリズムは、リチャードソン外装法、リチャードソン型の用途での有理関数外装法の使用、および修正した中点法を組み合わせた常微分方程式の数値解に対する方法であり、常微分方程式(ODE)に対する数値解を、高精度に、且つ、比較的僅かな演算努力で得る。それは、場合によっては、修正した中点法の誤差関数に関する結果の重要性のために、Gragg-Bulirsch-Stoer(GBS)アルゴリズムと呼ばれている。
【0037】
リチャードソン外装法は、その精度が、ステップ・サイズhの未知の解析関数としての、使用されたステップ・サイズhに依存する数値演算法を考慮し、hの様々な値で数値演算法を行ない、選択した解析関数を、結果として生じた点に適合させ、そして、h=0に対する適合関数を評価し、それによって、演算の結果を無限に微細なステップに近似する。
【0038】
Bulirsch-Stoer型アルゴリズムは、数値積分法におけるリチャードソン外装法に対する適合関数として有理関数を使用し、多項式の使用よりも優れている。有理関数は、多項式と比較して、近傍の極を説明するための分母における十分に高い乗数項があるとすれば、関数を極にやや良好に近似させることができる。多項式補間または外装法は、近傍の極が複素平面における既知のデータ点周囲の円の外側で比較的遠い場合には、単に良好な結果を生じるが、有理関数補間または外装法は、極の近傍においても著しく正確であることができる。
【0039】
含まれた修正した中点法は、サブステップ当たり1つのみの微分係数の評価を必要とするという長所を有している。それぞれサイズh=H/nのn個のサブステップからなり、hのべき級数として表現される、サイズHの修正した中点ステップの誤差は、一様にhの乗数だけを含んでいる。これは、Bulirsch-Stoer法を伴う修正した中点法を有用にする。なぜならば、その精度が、間隔Hと交差するための個別の試みの結果が、増大する数のサブステップと組み合わせられるときに、2桁増加する。
【0040】
軌道積分アルゴリズム・プログラム・コード110に含まれたBulirsch-Stoer型アルゴリズムは、幾つかの異なるステップを完了した後で解を提供すると期待することができるが、実際には、2ステップだけが本発明の実施形態には必要である。従って、6秒間の積分サンプリング・レートでは、加速度を3秒毎に演算する必要があるだけである。従って、Bulirsch-Stoer法の外装法ステージは、図1の用途では不必要である。
【0041】
従って、本発明の実施形態にかかる積分処理は、次のようなステップにまで減少する。
dT=6秒
h=dT/2=3秒
1)6秒間の間隔の始点、中間点、および終点での加速度を演算する:
A1=Accel(T)=totalAcceleration(T, r(T));
r_est(T+h)=r(T)+h*A1;
A2=Accel(T+h)=totalAcceleration(T+h, r_est(T+h));
r_est(T+dT)=r(T)+dT*A2;
A3=Accel(T+dT)=totalAcceleration(T+dT, r_est(T+dT));
2)T+dTでの状態を次のように演算する:
r(T+dT)=0.5*(r_est(T+h)+r_est(T+dT)+h*A3)
【0042】
図1に戻って、ケプラー解法115は、15個のケプラー・パラメータに対する推定値を演算するために機能制限付きマイクロコンピュータ108によって必要となる実行可能プログラムコードを提供する。
【数3】
これらは、ECEF座標系における一連の衛星X−Y−Z位置サンプルに最も良く適合するエフェメリス・パラメータと等価なものが存在する。ベクトルの成分
【数4】
は、従来の非線形エフェメリス方程式を使用して既知の位置成分X−Y−Zに関係する。次に、非線形のエフェメリス方程式は、有限位数のテーラー級数を使用して線形化され、ケプラー・パラメータを各X−Y−Z位置に関連づける一次方程式を見つける。そして、標準最小二乗法が、ケプラー・パラメータを解くために使用される。
【0043】
ケプラー解法プログラム・コード115は、軌道サンプルをECEFフレームにおけるX−Y−Z衛星位置からのエフェメリスに変換する。それが出力するエフェメリスは各々、9時間有効である(例えば、そのエフェメリス時間(TOE:time-of-ephemeris)の前の4時間、およびTOEの後の5時間)。
【0044】
ケプラー解法プログラム・コード115は、非常にコンパクトなエフェメリス形式で軌道積分データを格納する(例えば、3日間のLTCSMデータを20キロバイト以下にコンパクトする)。
【0045】
ケプラー解法プログラム・コード115は、エフェメリスについての単一の観測だけが、個々の対応するSV102に対して得られた後で動作を開始することができる。毎時1個程度のX−Y−Z位置サンプルが、機能をサポートするのに必要なすべてである。これは、8時間モデルに対するものを意味し、9個未満のサンプルだけが1基のSV102当たりに必要である。
【0046】
更新処理116は、機能制限付きマイクロコンピュータ108上の処理時間が新しいLTCSMを演算するために使用されるべきである場合にスケジュールされる。そのようなLTCSM処理は、通常の位置解がユーザにアクティブに提供される間、バックグラウンドで動作するか、または、ユーザがパワー・シャットダウンを要求した後に継続する残り処理として動作する。それは、SV102の衛星追跡中に、現在手持ちのSVエフェメリスが、パワーがシャットダウンされる前に利用可能となる最後のエフェメリスになる場合には知ることができない。後のエフェメリスが間もなく出る場合には、LTCSMを演算することには意味がない。しかし、もし手元のエフェメリスが、長期予測処理を開始するために使用されず、シャットダウンが介在する場合には、その機会は見逃される。
【0047】
また、更新処理116は、モデルの構築にプライオリティを与えることができ、近い未来の或る予測時刻でのLTCSM利用可能性を最適化する。多くの場合、ユーザは、或る1日のうちの時刻における繰り返しパターンでGPS受信機などの器具を使用する。例えば、午前の通勤と夜の帰宅の際にGPS受信機の電源をオンにする。そして、毎朝の通勤で、更新処理116は、その夜に必要となるLTCSMの電源が完全に切られることが可能になる前に準備完了となることを確認する。そして、その夜に、翌朝のためのLTCSMが更新処理116によって演算される。更新処理116は、これらの時間のみに構築されることができる。その利点は、より少ない数のモデルが演算されるということである。しかし、すべてのモデルをとにかく前方にやる必要があり、従って、結局のところ、優先順位付けには利益は殆どない。しかし、もし演算時間が最小限にされており、その演算が或る時間範囲だけで行なわれるのであれば、必要なLTCSMは、ちょうどそれらの時間の間、手元にあることになる。
【0048】
新しいエフェメリスが復号されるだけなので、演算資源および如何なるLTCSMの演算時間も浪費しないことが最良である。本発明の1つの基礎的な実施形態では、衛星ビークル102に対するLTCSMは、それらの擬似乱数(PRN)符号分割多元接続(CDMA)キー(例えば、PRN-1〜PRN-32)の順に演算される。しかし、LTCSMを逆「highN」順に演算する方が良い場合があり、これは、演算が、航法受信機およびユーザ位置から地球の反対側に現在あるそれらの衛星ビークル102に対してまずなされることを意味している。新しいエフェメリスが間もなく出ることはないので、それらのLTCSMは、直ぐには再演算されない。この方法は、勿論、必要な状態機械をより複雑にするが、不可能ではない。そのような逆highN順は、fixセッションがオフであり、演算が完了する前に次の電源投入が生じる場合に行なうのには依然として有効である。
【0049】
従って、LTCSMライブラリ118は、未来の航法解処理120をサポートするために構築および維持される。フラッシュ・メモリは、LTCSMライブラリ118用の記憶装置として使用されることができる。そのようなLTCSMライブラリ118は、次の数日間現われることができるSV122の未来の衛星群のうちの各々および全てのSVに対して保存される機能的なLTCSMを結局のところ有する。今後演算される解は、SV122からのまさに擬似距離への即時アクセスを持たずに、位置fix124を含んでいる。航法メッセージは、復調される必要がなく、従って、動作の高感度モードも可能になる。初期位置算出時間(TTFF)が主要な利点である。
【0050】
サーバ・ベースの拡張エフェメリス・ネットワークを接続した装置では、長期コンパクト・モデルの再構築ユニットは、ホスト・プラットフォームにサポートされる。処理は、ICD-GPS-200型の15パラメータ形式で現在のエフェメリスおよびクロック推定値を生成する。ホスト・プラットフォーム処理は、インターネット・プロトコル形式を除去し、GPS受信機とより良く適合するデータを抽出する。eRide社(カルフォルニア州サンフランシスコ)のPVT受信機は、例えば、NMEA ASCII形式でデータを受信し、従って、インターネット・パケット・ペイロードが抽出され、ASCIIペイロードに変換される。eRide社のMP受信機は、機能呼出しに応じてホストからデータを直接受信することができる。ホストは、インターネット形式をMPクライアント・ソフトウェアの在来形式に変換する。
【0051】
ここでは、図1の完全自律型の拡張エフェメリスGPS航法受信機100は、そのようなネットワーク接続またはそれに利用可能なサーバを有していない。
【0052】
衛星クロック・モデルに関しては、最後に観測されたクロック・モデルが常に使用される。これは、ここではハイブリッド・モデルと呼ばれる。この場合、新しいセルフエフェメリスをトリガしない新しいエフェメリスが収集されても、そのクロック・モデルは保存され、如何なるセルフエフェメリスがメモリから抽出され、位置fixに適用される場合に使用される。位置およびクロック全体は、二次衛星クロック係数が無視される際に、依然としてコンパクトなまたは低減したエフェメリスであると考えられる。
【0053】
今度はLTCSMライブラリ118を参照して、今後1週間全体の衛星軌道またはクロックについて、位置固定に対する十分な精度で記述するために、長期モデルを使用することができない。軌道およびクロックが複雑過ぎるからである。従って、今後1週間は、7日の各々に対して3つの8時間のセグメントに分割され、各セグメントの最初と最後に1時間のバッファを与える(例えば、可能なGPS衛星毎に21個の10時間長期モデル311〜333)。これらは、4時間の短期衛星モデル310が送られた後で進められ、それらは、メモリに対して最適化される。8時間のセグメントは、軌道誤差を越えた誤差に寄与しない演算された軌道に対する適合誤差の良好なトレードオフを与える。
【0054】
クロック情報は、機会が発生したときにクロック予測を更新または交換するために使用される。10時間長期モデルに含まれた如何なるクロック予測も、軌道予測を行なうよりも遥かに速く劣化する傾向がある。最新のクロック・モデルを得ることが可能な場合には、そのモデルは、LTCSMライブラリ118に格納されることができる。しかし、フラッシュ・メモリがどれくらいの頻繁で書かれ消されるかで劣化するので、幾つかのアプリケーションは、このようにしたくないことがある。それは、前に演算された任意のクロック・モデルに取って代わり、不揮発性メモリに格納されることができる。
【0055】
宇宙機軌道は、周知の力が作用するので予測可能である。しかし、衛星クロックは、原子時計基準から導き出され、次には予測不可能となるランダムな摂動を有する。この理由から、各LTCSMを演算するときの最も最近の観測されたエフェメリス・ベースのクロック・モデルによって可能な場合は常に、クロックを更新することが最良である。多くの努力がクロック・モデルの適合を改善するためになされても、結果として生じるクロック予測は、全く予測しないことに対して、全体的な統計的改善を通常生じさせない。
【0056】
良好な結果を与え、且つ、意図した用途で手頃な、1つの機能制限付きマイクロコンピュータ108は、フラッシュ装置における内蔵キャッシュ・メモリおよびプログラム・メモリを備えた54MHzで動作する所謂ARM-9である。それは、約6時間の処理時間で今後3日間の、32基のSVに対する拡張エフェメリスを演算することを可能にする。これも、3日間、1日当たり2時間の処理に分配されることができる。
【0057】
今度は図2を参照して、図1のもののような衛星航法受信機200は、無線周波数(RF)ステージ202、デジタル信号処理(DSP)ステージ204、ARM-9プロセッサ・コア206、温度制御水晶発振器(TCXO)208、およびフラッシュ・メモリ210を備えている。これらのすべてが、ユーザの電源オン/オフ要求に応じて、スケジューラ212によって個別にそれらの動作電源を制御される。モバイル型の受信機では、バッテリ214が動作電源をすべて供給する。スケジューラ210は、更新処理116(図1)によって指示される。
【0058】
図3は、典型的なユーザがどのように衛星航法受信機200の電源を入れ、その間、幾つかの位置fixを得て、そして、電源を切るかを、グラフ300で表わしている。特定の航法セッション302が、十分な拡張エフェメリスの列を(バックグラウンドで)演算するのに短すぎる場合、ユーザが電源を落とすことを要求したときに、RFおよびDSPステージ202および204が切られるが、残りの必要な拡張エフェメリスを演算するために必要とされる他の要素ステージは切られない。「LTCSMを演算する」セッション304は、演算(例えば、軌道積分、座標変換、ケプラー解法)を続けることが可能である。
【0059】
次の数時間をカバーするそれらの拡張エフェメリスだけが、演算される必要がある。今後の日または週を演算することは、ユーザが数分だけ戻ってきて電源を入れる要求をするという努力の浪費になる。典型的なハードウェアの実施では、RFステージ202は15mAの電源、DSPステージ204は30mAを消費することがあり、ARM-9ステージ206は僅か5mAしか必要とせず、TCXOステージ208は3mAを使用し、フラッシュ・メモリ210は2mAを必要とする。従って、バックグラウンド処理は、バッテリからの比較的非常に少ない電力消費でなされることができる。1ボルトのコアを使用して、これは、10mWにまで積み上げられる。
【0060】
更新処理116およびスケジューラ210に使用することができる1つの方策は、ユーザが電源を切ることを要求するまでLTCSMライブラリ118の如何なる更新も行なわないことである。その後、演算することができるLTCSMは、LTCSMを演算するセッション304中に演算される。そのような方策に伴うリスクは、ユーザが非常に長い時間、電源を切らない場合があることである。そして、LTCSMライブラリ118の全体または一部が期限切れになることがある。そのリスクを緩和すべく、LTCSMライブラリ118の最後の更新から経過を許容される最大時間に制限を課し、演算は、航法セッション302中にバックグラウンド・モードで継続される。代わりに、様々な要素LTCSMが、それらが期限切れとなったときに検査され、そして、それらの期限を逃れるために更新が予定される。
【0061】
航法セッション306は、SV122から直ちに利用可能にならない幾つかの現在のエフェメリスにも拘わらず、航法処理120が位置fix124を提供することを可能にする、LTCSMライブラリ118における実行可能なLTCSMがあることに少なくとも部分的に依存することを表わしている。
【0062】
本発明は、現在のところ好ましい実施形態の点から記述されたが、本開示が、限定するものと解釈されるべきでないことが理解される。様々な変更および修正が、疑いなく、上記の開示を読んだ後で当業者に明白となる。従って、添付した特許請求の範囲が本発明の範囲内に該当するような変更および修正をすべて包含すると解釈されることを意図している。
【符号の説明】
【0063】
100、200 GPS航法受信機
102、122 GPS衛星ビークル(SV)
104 プロセッサ
106 エフェメリスおよびアルマナックの完全なコレクション
108 マイクロコンピュータ
110 軌道積分アルゴリズム・プログラム・コード
112 力モデル
114 座標変換プログラム・コード
115 ケプラー解法プログラム・コード
116 更新処理
118 LTCSMライブラリ
120 未来の航法解処理
124 位置fix
202 無線周波数(RF)ステージ
204 デジタル信号処理(DSP)ステージ
206 ARM-9プロセッサ・コア
208 温度制御水晶発振器(TCXO)
210 フラッシュ・メモリ
212 スケジューラ
214 バッテリ
【技術分野】
【0001】
本発明は、航法受信機に関し、特に、全地球測位システム(GPS)の衛星軌道およびクロックの、自身の長期モデルを構築することができる受信機に関する。
【背景技術】
【0002】
全地球測位システム(GPS)用としてどこででも見つけることができるような衛星航法受信機は、受信機の位置を演算するために、追跡している各衛星の正確な軌道位置を知ることに依存している。そのようなエフェメリス情報は、単に周期的に更新され、それはあまりにも速く古くなってしまう。
【0003】
携帯電話機およびデジタル・カメラは、現在撮っている写真のユーザおよび場所に対する位置fixを提供するGPS航法受信機を普通に装備している。これらの埋込み型のGPS航法受信機は、ネットワーク・サーバから衛星エフェメリスおよびアルマナック・データをダウンロードすることができる被支援型(A-GPS)であり、従って衛星自体から情報を直接的に収集するために必要な通常の長い時間を待機する必要がない。しかし、ネットワーク接続は、特にモバイル・ユーザにとっては、100%信頼することができるものではなく、常に利用可能なわけでもない。コールド・スタートで直ちに利用可能となる衛星エフェメリスおよびアルマナック・データを有していないことは、最初のfixまでの時間が受容できないほど長くなり得ることを意味する。
【0004】
GPSシステムでは、20,200kmの高度で地球を周回する少なくとも24基の衛星が軌道上に一定間隔で配置され、その結果、ユーザが最低6基の衛星をいつでも見ることができる。そのような衛星はそれぞれ、正確な時間および位置の信号を送信している。GPS受信機は、それに達するまでの信号の時間遅れを測定し、それから見掛けの受信機・衛星間距離を演算する。少なくとも4基の衛星からのこのような測定は、GPS受信機がその三次元の位置、速度、およびシステム時刻を演算することを可能にする。見掛けの距離は、真のGPSシステム時刻からオフセットした衛星および受信機時刻の時間オフセットも含んでいる。
【0005】
受信機位置の解は、適切な衛星の各々が3次元空間のどこにあるか、および、各衛星のGPS時刻からの時間オフセットを知ることに依存している。それぞれの位置は、1組のケプラー方程式に属するパラメータとして報告される。従来のGPSシステムでは、GPSのエフェメリスは、表Iにおける項目をすべて含んでいる。
【表1】
【0006】
エフェメリス・メッセージの有効期間に、航法受信機にダウンロードされた完全なGPSエフェメリス・メッセージ情報を使用して、その飛行の任意の一瞬間のGPS時刻から、ほぼ正確な衛星の位置および速度、ならびにそのクロック(時間)オフセットを演算することが可能である。勿論、これによってGPSエフェメリス・メッセージをダウンロードすることができると考えられる。
【0007】
GPS衛星の演算された位置は、これらのパラメータの殆どの小さな変化に非常に敏感であるので、各エフェメリス・ダウンロード中に完全にそれらを通信することが必要である。しかし、2005年12月15日に発行された米国特許出願第2005/0278116A1号に記述されているように、軌道傾転角の2つの高調波補正(CicおよびCis)がそれほど致命的ではないとも報告されている。eRide社(カルフォルニア州サンフランシスコ)は、少なくとも、これらの2つのパラメータのうちの1つが零にセットされ、衛星位置の演算には使用されない「コンパクトな」衛星モデルを伝えている。解の精度は、著しく下げることができない。二次クロック時刻オフセットは、僅かなインパクトしかなく、無視することができる。
【0008】
それは、周回軌道衛星およびそれらの軌道についてすべて記述する完全なアルマナックおよびエフェメリスを収集することができるように、GPS航法受信機に最低でも12.5分間の連続運転をさせる。多くのデータがあり、この情報(navData)を転送するために使用される50Hzの変調は、非常に遅い。受信機の信号強度は、navDataの副搬送波を復調することが可能なように良好でなければならない。従って、時間の不足および/または強い信号の不足は、迅速な最初の位置fixを得ようとするユーザにフラストレーションを起こさせることがある。
【0009】
従来の受信機は、前の運用セッションにおいてアルマナック・データを格納することによってこの問題を解決する。その後、現時点で収集したエフェメリス・データは、格納されているアルマナック・データと比較され、何を更新する必要があるかを判断する。従って、より完全で更新されたアルマナックが構築され、そして、受信機自体で維持されて、将来のウォーム・スタートで即座に利用可能になる。従って、捕捉時刻を考慮した後、新しいGPSセッションの最初のfixまでの時間は、主としてエフェメリスを収集するための時間に依存する。
【0010】
ネットワーク・サーバからの従来の衛星エフェメリス・データは、より速く古くなっており、従って、A-GPS航法受信機は、少なくとも毎日、サーバに接続する必要がある。典型的な見通し線(Los)の範囲精度は、通常容認される適用可能範囲のエフェメリス時間(toe)の中心の後、4時間以内に25m以上低下する。現在、GPS衛星は、2時間毎に新しいエフェメリスを放送し、エフェメリス時間は、新しいモデルへの移行時の1時間後である。GPS衛星は、12時間の軌道を移動するので、前のセッションからのモデルの使用は、最後のセッションの後、たった5時間しか位置fixを一般には許容しない。これらのfixは、視認可能な衛星の数が3基以下に低下した場合に劣化する。携帯電話機およびカメラが使用される方法の現実性を考えると、サーバに毎日接続することは、可能でないことがあるし現実的ではないことがある。
【0011】
他の拡張支援技術も、リアルタイム支援のGPS技術を越えて発展した。頭上を飛行する衛星から受信する実際のエフェメリス情報を待機する代わりに、合成等価物が予測され、予めロードされる。そのような予測情報(つまり、「拡張エフェメリス」)は、最大1週間有効である衛星の未来のエフェメリスの推定値である。合成支援が装置上で利用可能な場合には、GPS起動時間は、サーバ処理が必要ではないので、リアルタイム支援技術と比較して著しく減少されることができる。
【0012】
2種類の拡張エフェメリス解が現在のところ標準である(ネットワークを有効にする/完全に自律する)。ネットワークを有効にする解は、予測サーバからの周期的なデータ・ダウンロードを必要とする。完全に自律する解は、ネットワーク支援を必要とせず、それら自身の衛星観測から自身の合成支援を学習し生成する。
【0013】
完全自律型の解は場合によっては不便な制限をしている、それらは、実際に見た衛星用データだけを予測することができ、近い時間隣接性を有している多数の観測を必要とすることがある。これは、拡張モデルの利用可能性が、受信機の使用頻度に依存し、従って、より大きな電力消費を必要とすることを意味している。自律モデルでは、導き出したデータは、精度があまりに低下する前の最大3日間使用可能である。ネットワークを有効にする解は、より長く、より正確な予測を提供する(場合によっては、全衛星群に対して最大10日または1週間)。
【0014】
拡張エフェメリス解は、市場で入手可能になったが、その特徴を実施した各チップセット販売者の厳格な所有物のままである。チップセット所有者のネットワーク有効解は、サーバ上の予測データを通常演算し、携帯機器に周期的にダウンロードされる。これらのサーバを基本とした予測技術は、一般に、実質的には1週間単位のデータ・ペイロード(典型的には、1つの衛星群当たり50〜80キロバイト)を課す。広帯域データの接続性に問題があるか、または、コストが高過ぎることがある用途では、そのようなオーバヘッドには、高価過ぎて手が出ない。
【0015】
必要なのは、制限付き演算能力を備え、僅かなネットワーク・アクセスを備えるかまたはネットワーク・アクセスが全くなく、そして、拡張モデルを生成するために観測されるエフェメリス近傍の時刻に特別な要求を配置しないGPS受信機によって演算することができるGPS衛星軌道およびクロックのコンパクトで長期的なモデルである。
【発明の開示】
【0016】
簡潔には、改良型の拡張エフェメリス航法受信機は、軌道上のナビゲーション・システム衛星からマイクロ波伝送を受信する完全自律型の衛星航法受信機を有し、それらのナビゲーション・システム衛星用のエフェメリスを含んだ航法メッセージを復調することができる。その改良は、特定の衛星ビークルに作用する加速度の力モデルを含んでおり、受信機専用である。力モデルは、変換モデルを必要とし、それは、地球慣性系と地球固定座標系との間の変換を可能にし、その結果、すべての力がそれらの固有座標系で積分されることができる。各SVのエフェメリスについての単一の観測は、その対応する力モデルで各SVの軌道位置を積分することによって今後の何日かを入力され伝搬される。伝搬されるデータの記憶を減少させ、受信機の処理における使用を単純化するために、生成される軌道は、サンプリングされ、GPS放送のエフェメリスと同様の長期的なケプラーのエフェメリス形式に変換され、そして、不揮発性メモリに格納される。その後、完全自律型の衛星航法受信機は、それぞれのSVからの前記航法メッセージを直ちに得て復調することができない場合に、代替物として使用することができる拡張エフェメリス予測に対して利用可能となる。
【0017】
本発明のこれらのおよび他の目的および利点は、様々な図面において図示される好ましい実施形態の次の詳細な記述を読んだ後で、当業者にとっては疑いなく明白になるであろう。
【図面の簡単な説明】
【0018】
【図1】本発明の完全自律型の拡張エフェメリスGPS航法受信機の実施形態の機能ブロック図である。
【図2】長期コンパクト衛星モデル(LTCSM: Long-term compact satellite model)の更新をサポートする様々なハードウェア・ステージに適用することができる動力制御を示す、本発明の衛星航法受信機の実施形態の機能ブロック図である。
【図3】本発明の衛星航法受信機の実施形態がユーザによって必要とされ得る時間、および、LTCSMライブラリに対する更新処理をどのように予定することができるかを示すグラフである。
【発明を実施するための最良の形態】
【0019】
図1は、本発明の完全自律型の拡張エフェメリスGPS航法受信機の実施形態を表わし、ここでは一般的な参照数字100によって参照される。時間と共に、すべての軌道上のGPS衛星ビークル(SV)102のうちの、継続して変化する衛星群は、その、後に更新されるそれぞれのエフェメリスを含んだマイクロ波信号を送信する。プロセッサ104は、何日間も、また何週間も有効なものとしてそれらを含んだエフェメリスおよびアルマナックの各々を復調する。エフェメリスおよびアルマナックの完全なコレクション106は、機能制限付きマイクロコンピュータ108にその後継続して利用可能である。
【0020】
各SV102によって送信されたGPS航法メッセージは、GPS衛星位置、クロック・オフセット、および他のシステム・パラメータについて記述するパラメータを含んでいる。航法メッセージは、毎秒50ビットで送信される300ビット・シーケンスの5つのサブフレームにそれぞれ分割された25個のデータ・フレームを含んでいる。従って、サブフレームはそれぞれ6秒を必要とし、各フレームは30秒で、25個のフレームの全セットは、完全に受信するのに12.5分掛かる。サブフレーム番号1,2,および3は、完全な軌道およびクロックの記述、ならびにそれらを送信している衛星に関する他のメッセージに対してリザーブされている。サブフレーム4および5は、すべての衛星に共通のすべての衛星およびシステム・データに対する略した軌道およびクロック・データを担持している。GPS受信機は、データ・ビットを整列させ、それらをパリティ・アルゴリズムでエラーがないかチェックし、それらを特定のパラメータを表わすセットに分け、それらを測り、そのビットを数値の形式および特定の単位に変換する。例えば、メートル(m)、m2、半円、ラジアン、秒、秒/秒、秒/秒2、および週である。パラメータはそれぞれ、位置および時間の推定値を導き出すためにGPS受信機によって必要とされる基礎を提供する。必要とされる様々なアルゴリズムは、ナブスターGPS共同プログラム・オフィス(Navstar GPS Joint Program Office)のインタフェース制御に関する文献ICD-GPS-200Cで規定されている。
【0021】
通常、長期コンパクト衛星モデル(LTSCM)の演算は、2倍精度の数学コプロセッサを備えた高性能コンピュータ・プロセッサを必要とする。これは、従来の衛星力加速度モデルおよび座標変換が数秒おきに非常に正確に演算されなければならないからであり、その結果、積分誤差は、際限なく大きくなる。その演算は、すべてのSV102に対して、且つ、少なくとも1週間先について6〜12時間毎になされなければならない。従来の衛星航法受信機およびスマートフォンで使用されるプロセッサの種類は、そのような機能の能力がなく、モバイル装置は、そのような演算中に生じる高レベルのバッテリ電力使用に対して、さらに、非常に耐えることができない。
【0022】
特別軌道積分アルゴリズム・プログラム・コード110は、収集したエフェメリスの各々を未来へ投影するために、対応する力モデル112を適用する機能制限付きマイクロコンピュータ108に提供される。各SVのエフェメリスについての単一の観測だけが、対応するSV投影の各々に使用される(例えば、そのSVに対して復調および確認された最後の良好なエフェメリス)。そのようなアプローチは、演算上の負荷を減少させ、そして、さらに重要なことには、受信機がオンであり、エフェメリスを収集していなければならない時間を減少させる。そのような単一のポイント観測は、それにも拘わらず、7〜10日先まで有用であり得る高品質な拡張エフェメリス情報を提供する。これは、各SVに作用する加速力が軌道偏差の他のすべての原因を支配するからである。軌道の投影は、対応するSVが再び遭遇し、リアルタイムのエフェメリス復調が可能でない場合に、未来での使用に対してケプラーに基づく長期コンパクト衛星モデル(LTCSM)としての出力用に構成される。
【0023】
一般に、本発明の実施形態にかかる軌道積分方程式は、サーバ上で長期コンパクト衛星モデル(LTCSM)を演算するために使用されるものと類似している。しかし、幾つかの方程式は、比較的穏当な完全自律型の衛星航法受信機上で実行される演算負荷および時間を低減させるために単純化されなければならない。加えて、太陽光パネルのサイズおよび各衛星の重量などの幾つかのパラメータは、各宇宙機に対して同じであると想定され、これは、通常の航法データで利用可能ではない外部入力データを提供する必要性を低減する。
【0024】
座標変換プログラム・コード114は、機能制限付きマイクロコンピュータ108に提供される。2つの座標系が、軌道積分演算で使用される(例えば、(1)国際天文基準座標系国際天文基準座標系)(ICRF、別名ICRS)、および(2)地球中心・地球固定(ECEF)座標系(WGS-84、国際地球基準座標系(ITRF)およびITRSとしても知られている)。ICRFにおける原点は、太陽系の重心(例えば、共通重心)に配置され、その位置では、すべての太陽系体によって作用する重力が相殺される。その軸方向は「空間的に固定されて」いる。ECEF系の原点は、地球の質量中心に配置される。そのX軸は、平均赤道および平均基準子午線の交点であり、Z軸は、1900年から1905年までの間の地球の平均自転軸である。
【0025】
ECEFからICRFおよびICRFからECEFへの座標変換は、4つの四元数回転を含んでいる。四元数はそれぞれ、4つの要素を有しており、回転行列演算をすることにおいて非常に効率的である。例えば、
【数1】
ここで、
P:歳差;
N:章動、
θ:地球回転;
π:極運動であり、
上付き文字「conj」は、四元数の共役を省略したものである。
【0026】
本発明の実施形態で使用することができる4つの回転行列は、次の文献に詳細に記述されている:Oliver Montenbruck and Eberhard Gill, Satellite orbits: Models, Method, Applications, first edition 2000, p. 66, ISBN: 978-3-540-67280-7。ECEFからICRFへの変換では、4つの四元数回転は、座標変換プログラム・コード114で使用される。
【数2】
【0027】
極運動回転四元数は、地球方位パラメータ、所謂EOPに基づいている。これらのパラメータは、例えば、maia.usno.navy.mil/ser7/ser7.datでの米国海軍によって提供されるものを使用して10年間予報を使用することによって予測される(国際地球回転観測事業(IERS:International Earth Rotation and Reference Systems Service)掲示板A、地球方位の迅速な提供および予測)。EOPの不適当なモデリングは、積分期間の増加として増加的に大きな誤差を生じることがある。これらのEOPパラメータは、本来正弦関数であるが、任意に変動する位相および振幅を伴う。半周期分間違っている値の使用は、3日後に200mのオーダの誤差に結びつく場合がある。掲示板の準備に使用される寄与した観測は、www.usno.navy.mil/USNO/earth-orientation/eo-info/general/input-dataで利用可能である。寄与した分析結果は、超長基線電波干渉法(VLBI)、衛星レーザ測距(SLR)、全地球測位システム(GPS)衛星、月レーザ測距(LLR)、および大気角運動量(AAM)の変化についての気象的予測からのデータに基づいている。従って、セルフエフェメリスの精度は、EOPモデルの期待する有用性範囲の後でゆっくりと低下することがある。この場合、ユーザは、受信機のソフトウェアをリフレッシュするか、または、特別な入力コマンドを通じてEOPパラメータの新しいセットを入力することを要求することができる。前方EOP予測モデルは、10年以上有効であり、10年以降ゆっくりと低下する精度を有している。
【0028】
現在発行されているEOP変換の係数xおよびyの構造および係数は、次の通りである。
x=0.0972+0.1154cosA+0.0380sinA-0.0411cosC+0.0729sinC;
y=0.3418+0.0313cosA-0.1043sinA+0.0729cosC+0.0411sinC;
UT1-UTC=-0.0677-0.00081(MJD-55435)-(UT2-UT1);
ここでは、A=2*pi*(MJD-55427)/365.25およびC=2*pi*(MJD-55427)/435;ならびにMJDは周知の修正したユリウス日時間枠である。
【0029】
4つの加速力が、ICRF座標系で積分される(地球重力、月重力、太陽重力、および太陽放射)。これらは、3秒毎に機能制限付きマイクロコンピュータ108によって演算され、その結果は、それぞれのSV102の位置および速度を伝搬するために使用される。たとえ地球重力が明白に支配したとしても、4つの力をすべてモデル化することが重要である。しかしながら、他の力の影響も重要である。例えば、太陽放射力をモデル化しないことは、たった3日間で20〜30mの誤差を生じさせる場合がある。一方で、1秒間の積分期間は、より高い精度に結び付き、3秒間の積分期間は、精度および演算時間の最良の妥協として選ばれる。
【0030】
地球の重力による加速度を演算するために使用することができる1つの方法は、Oliver Montenbruck, Eberhard Gill, Satellite Orbits: Models, Method, Applicationsに記述されている。太陽および月の重力の演算は、ニュートンの万有引力の法則に基づくことができる。http://en.wikipedia.org/wiki/Newton%27s_law_of_universal_gravitationを参照。つまり、重量物から空間中の物体に加えられた加速度は、次のものに等しい。
a_gravity=G*M_heavy_body/r^2;
ここでは、Gは重力加速度であり、M_heavy_bodyは、太陽および月の質量である(定数でもある)。「r」は重量物と衛星との間の距離である。
【0031】
太陽および月の位置は、力モデル112および機能制限付きマイクロコンピュータ108によって10分毎に演算され、10分以内の同じ演算された位置を使用する。太陽および月の演算は重たく、従って、その演算は積分のステップ毎に繰り返されない。10分間の割合が、精度と演算時間との間のトレードオフの点から最適であると認められた。
【0032】
太陽放射もまた、例えば、Henry F. Fliegel, Thomas E. Galini, Solar Force Modeling of Block IIR Global Positioning System Satellite, Journal of Spacecraft and Rockets, Vol. 33, No. 6, p. 863-866, 1996年によって示唆されるモデルを使用して、力モデル112および機能制限付きマイクロコンピュータ108によって演算される。角度βは、太陽・地球間線とSV軌道面との間の角度として演算される(例えば、ベクトル「r」およびベクトル「r-rSun」)。
【0033】
太陽放射力は、最終加速度を得るためにSVの質量を計ることによって演算される。太陽放射は、SVの太陽光パネルの重量および面積が問題とする唯一の力である。現在使用可能なGPS衛星は2種類ある(block II-Aおよびblock II-R)。
Block II-A SV: mass=984.5kg, area=8.133m^2;
Block II-R SV: mass=1100kg, area=17.66 m^2
Block II-AのGPS衛星は、継続してBlock II-R衛星に置き換えられている。交換がそれぞれ生じたときには、そのような情報が受信機には通常利用可能にならない。しかし、実験は、Block II-Rの衛星の物理的パラメータが、受信機の位置解における重要な悪影響なしに、すべてのSV(II-Aを含む)に想定されることができることを示している。
【0034】
数値的方法が加速力をすべて積分するために使用される。時刻「T」でのICRFフレームにおける衛星状態ベクトル「r」を与えられて、「r」は、6つの成分を有している(3つは位置用、3つは速度用である)。時刻「T+dT」での状態ベクトル「r」を推定するために、ここでは、dTは、積分のステップ・サイズであり、本発明の実施形態では6秒である。6秒を選択することは、受容可能な位置精度および減少した演算時間の点から最適な性能をもたらす。
【0035】
機能制限付きマイクロコンピュータ108に提供された軌道積分アルゴリズム・プログラム・コード110は、Bulirsch-Stoer型のアルゴリズムを含んでいる(en.wikipedia.org/wiki/Bulirsch-Stoer_algorithmを参照)。
【0036】
そのようなアルゴリズムは、リチャードソン外装法、リチャードソン型の用途での有理関数外装法の使用、および修正した中点法を組み合わせた常微分方程式の数値解に対する方法であり、常微分方程式(ODE)に対する数値解を、高精度に、且つ、比較的僅かな演算努力で得る。それは、場合によっては、修正した中点法の誤差関数に関する結果の重要性のために、Gragg-Bulirsch-Stoer(GBS)アルゴリズムと呼ばれている。
【0037】
リチャードソン外装法は、その精度が、ステップ・サイズhの未知の解析関数としての、使用されたステップ・サイズhに依存する数値演算法を考慮し、hの様々な値で数値演算法を行ない、選択した解析関数を、結果として生じた点に適合させ、そして、h=0に対する適合関数を評価し、それによって、演算の結果を無限に微細なステップに近似する。
【0038】
Bulirsch-Stoer型アルゴリズムは、数値積分法におけるリチャードソン外装法に対する適合関数として有理関数を使用し、多項式の使用よりも優れている。有理関数は、多項式と比較して、近傍の極を説明するための分母における十分に高い乗数項があるとすれば、関数を極にやや良好に近似させることができる。多項式補間または外装法は、近傍の極が複素平面における既知のデータ点周囲の円の外側で比較的遠い場合には、単に良好な結果を生じるが、有理関数補間または外装法は、極の近傍においても著しく正確であることができる。
【0039】
含まれた修正した中点法は、サブステップ当たり1つのみの微分係数の評価を必要とするという長所を有している。それぞれサイズh=H/nのn個のサブステップからなり、hのべき級数として表現される、サイズHの修正した中点ステップの誤差は、一様にhの乗数だけを含んでいる。これは、Bulirsch-Stoer法を伴う修正した中点法を有用にする。なぜならば、その精度が、間隔Hと交差するための個別の試みの結果が、増大する数のサブステップと組み合わせられるときに、2桁増加する。
【0040】
軌道積分アルゴリズム・プログラム・コード110に含まれたBulirsch-Stoer型アルゴリズムは、幾つかの異なるステップを完了した後で解を提供すると期待することができるが、実際には、2ステップだけが本発明の実施形態には必要である。従って、6秒間の積分サンプリング・レートでは、加速度を3秒毎に演算する必要があるだけである。従って、Bulirsch-Stoer法の外装法ステージは、図1の用途では不必要である。
【0041】
従って、本発明の実施形態にかかる積分処理は、次のようなステップにまで減少する。
dT=6秒
h=dT/2=3秒
1)6秒間の間隔の始点、中間点、および終点での加速度を演算する:
A1=Accel(T)=totalAcceleration(T, r(T));
r_est(T+h)=r(T)+h*A1;
A2=Accel(T+h)=totalAcceleration(T+h, r_est(T+h));
r_est(T+dT)=r(T)+dT*A2;
A3=Accel(T+dT)=totalAcceleration(T+dT, r_est(T+dT));
2)T+dTでの状態を次のように演算する:
r(T+dT)=0.5*(r_est(T+h)+r_est(T+dT)+h*A3)
【0042】
図1に戻って、ケプラー解法115は、15個のケプラー・パラメータに対する推定値を演算するために機能制限付きマイクロコンピュータ108によって必要となる実行可能プログラムコードを提供する。
【数3】
これらは、ECEF座標系における一連の衛星X−Y−Z位置サンプルに最も良く適合するエフェメリス・パラメータと等価なものが存在する。ベクトルの成分
【数4】
は、従来の非線形エフェメリス方程式を使用して既知の位置成分X−Y−Zに関係する。次に、非線形のエフェメリス方程式は、有限位数のテーラー級数を使用して線形化され、ケプラー・パラメータを各X−Y−Z位置に関連づける一次方程式を見つける。そして、標準最小二乗法が、ケプラー・パラメータを解くために使用される。
【0043】
ケプラー解法プログラム・コード115は、軌道サンプルをECEFフレームにおけるX−Y−Z衛星位置からのエフェメリスに変換する。それが出力するエフェメリスは各々、9時間有効である(例えば、そのエフェメリス時間(TOE:time-of-ephemeris)の前の4時間、およびTOEの後の5時間)。
【0044】
ケプラー解法プログラム・コード115は、非常にコンパクトなエフェメリス形式で軌道積分データを格納する(例えば、3日間のLTCSMデータを20キロバイト以下にコンパクトする)。
【0045】
ケプラー解法プログラム・コード115は、エフェメリスについての単一の観測だけが、個々の対応するSV102に対して得られた後で動作を開始することができる。毎時1個程度のX−Y−Z位置サンプルが、機能をサポートするのに必要なすべてである。これは、8時間モデルに対するものを意味し、9個未満のサンプルだけが1基のSV102当たりに必要である。
【0046】
更新処理116は、機能制限付きマイクロコンピュータ108上の処理時間が新しいLTCSMを演算するために使用されるべきである場合にスケジュールされる。そのようなLTCSM処理は、通常の位置解がユーザにアクティブに提供される間、バックグラウンドで動作するか、または、ユーザがパワー・シャットダウンを要求した後に継続する残り処理として動作する。それは、SV102の衛星追跡中に、現在手持ちのSVエフェメリスが、パワーがシャットダウンされる前に利用可能となる最後のエフェメリスになる場合には知ることができない。後のエフェメリスが間もなく出る場合には、LTCSMを演算することには意味がない。しかし、もし手元のエフェメリスが、長期予測処理を開始するために使用されず、シャットダウンが介在する場合には、その機会は見逃される。
【0047】
また、更新処理116は、モデルの構築にプライオリティを与えることができ、近い未来の或る予測時刻でのLTCSM利用可能性を最適化する。多くの場合、ユーザは、或る1日のうちの時刻における繰り返しパターンでGPS受信機などの器具を使用する。例えば、午前の通勤と夜の帰宅の際にGPS受信機の電源をオンにする。そして、毎朝の通勤で、更新処理116は、その夜に必要となるLTCSMの電源が完全に切られることが可能になる前に準備完了となることを確認する。そして、その夜に、翌朝のためのLTCSMが更新処理116によって演算される。更新処理116は、これらの時間のみに構築されることができる。その利点は、より少ない数のモデルが演算されるということである。しかし、すべてのモデルをとにかく前方にやる必要があり、従って、結局のところ、優先順位付けには利益は殆どない。しかし、もし演算時間が最小限にされており、その演算が或る時間範囲だけで行なわれるのであれば、必要なLTCSMは、ちょうどそれらの時間の間、手元にあることになる。
【0048】
新しいエフェメリスが復号されるだけなので、演算資源および如何なるLTCSMの演算時間も浪費しないことが最良である。本発明の1つの基礎的な実施形態では、衛星ビークル102に対するLTCSMは、それらの擬似乱数(PRN)符号分割多元接続(CDMA)キー(例えば、PRN-1〜PRN-32)の順に演算される。しかし、LTCSMを逆「highN」順に演算する方が良い場合があり、これは、演算が、航法受信機およびユーザ位置から地球の反対側に現在あるそれらの衛星ビークル102に対してまずなされることを意味している。新しいエフェメリスが間もなく出ることはないので、それらのLTCSMは、直ぐには再演算されない。この方法は、勿論、必要な状態機械をより複雑にするが、不可能ではない。そのような逆highN順は、fixセッションがオフであり、演算が完了する前に次の電源投入が生じる場合に行なうのには依然として有効である。
【0049】
従って、LTCSMライブラリ118は、未来の航法解処理120をサポートするために構築および維持される。フラッシュ・メモリは、LTCSMライブラリ118用の記憶装置として使用されることができる。そのようなLTCSMライブラリ118は、次の数日間現われることができるSV122の未来の衛星群のうちの各々および全てのSVに対して保存される機能的なLTCSMを結局のところ有する。今後演算される解は、SV122からのまさに擬似距離への即時アクセスを持たずに、位置fix124を含んでいる。航法メッセージは、復調される必要がなく、従って、動作の高感度モードも可能になる。初期位置算出時間(TTFF)が主要な利点である。
【0050】
サーバ・ベースの拡張エフェメリス・ネットワークを接続した装置では、長期コンパクト・モデルの再構築ユニットは、ホスト・プラットフォームにサポートされる。処理は、ICD-GPS-200型の15パラメータ形式で現在のエフェメリスおよびクロック推定値を生成する。ホスト・プラットフォーム処理は、インターネット・プロトコル形式を除去し、GPS受信機とより良く適合するデータを抽出する。eRide社(カルフォルニア州サンフランシスコ)のPVT受信機は、例えば、NMEA ASCII形式でデータを受信し、従って、インターネット・パケット・ペイロードが抽出され、ASCIIペイロードに変換される。eRide社のMP受信機は、機能呼出しに応じてホストからデータを直接受信することができる。ホストは、インターネット形式をMPクライアント・ソフトウェアの在来形式に変換する。
【0051】
ここでは、図1の完全自律型の拡張エフェメリスGPS航法受信機100は、そのようなネットワーク接続またはそれに利用可能なサーバを有していない。
【0052】
衛星クロック・モデルに関しては、最後に観測されたクロック・モデルが常に使用される。これは、ここではハイブリッド・モデルと呼ばれる。この場合、新しいセルフエフェメリスをトリガしない新しいエフェメリスが収集されても、そのクロック・モデルは保存され、如何なるセルフエフェメリスがメモリから抽出され、位置fixに適用される場合に使用される。位置およびクロック全体は、二次衛星クロック係数が無視される際に、依然としてコンパクトなまたは低減したエフェメリスであると考えられる。
【0053】
今度はLTCSMライブラリ118を参照して、今後1週間全体の衛星軌道またはクロックについて、位置固定に対する十分な精度で記述するために、長期モデルを使用することができない。軌道およびクロックが複雑過ぎるからである。従って、今後1週間は、7日の各々に対して3つの8時間のセグメントに分割され、各セグメントの最初と最後に1時間のバッファを与える(例えば、可能なGPS衛星毎に21個の10時間長期モデル311〜333)。これらは、4時間の短期衛星モデル310が送られた後で進められ、それらは、メモリに対して最適化される。8時間のセグメントは、軌道誤差を越えた誤差に寄与しない演算された軌道に対する適合誤差の良好なトレードオフを与える。
【0054】
クロック情報は、機会が発生したときにクロック予測を更新または交換するために使用される。10時間長期モデルに含まれた如何なるクロック予測も、軌道予測を行なうよりも遥かに速く劣化する傾向がある。最新のクロック・モデルを得ることが可能な場合には、そのモデルは、LTCSMライブラリ118に格納されることができる。しかし、フラッシュ・メモリがどれくらいの頻繁で書かれ消されるかで劣化するので、幾つかのアプリケーションは、このようにしたくないことがある。それは、前に演算された任意のクロック・モデルに取って代わり、不揮発性メモリに格納されることができる。
【0055】
宇宙機軌道は、周知の力が作用するので予測可能である。しかし、衛星クロックは、原子時計基準から導き出され、次には予測不可能となるランダムな摂動を有する。この理由から、各LTCSMを演算するときの最も最近の観測されたエフェメリス・ベースのクロック・モデルによって可能な場合は常に、クロックを更新することが最良である。多くの努力がクロック・モデルの適合を改善するためになされても、結果として生じるクロック予測は、全く予測しないことに対して、全体的な統計的改善を通常生じさせない。
【0056】
良好な結果を与え、且つ、意図した用途で手頃な、1つの機能制限付きマイクロコンピュータ108は、フラッシュ装置における内蔵キャッシュ・メモリおよびプログラム・メモリを備えた54MHzで動作する所謂ARM-9である。それは、約6時間の処理時間で今後3日間の、32基のSVに対する拡張エフェメリスを演算することを可能にする。これも、3日間、1日当たり2時間の処理に分配されることができる。
【0057】
今度は図2を参照して、図1のもののような衛星航法受信機200は、無線周波数(RF)ステージ202、デジタル信号処理(DSP)ステージ204、ARM-9プロセッサ・コア206、温度制御水晶発振器(TCXO)208、およびフラッシュ・メモリ210を備えている。これらのすべてが、ユーザの電源オン/オフ要求に応じて、スケジューラ212によって個別にそれらの動作電源を制御される。モバイル型の受信機では、バッテリ214が動作電源をすべて供給する。スケジューラ210は、更新処理116(図1)によって指示される。
【0058】
図3は、典型的なユーザがどのように衛星航法受信機200の電源を入れ、その間、幾つかの位置fixを得て、そして、電源を切るかを、グラフ300で表わしている。特定の航法セッション302が、十分な拡張エフェメリスの列を(バックグラウンドで)演算するのに短すぎる場合、ユーザが電源を落とすことを要求したときに、RFおよびDSPステージ202および204が切られるが、残りの必要な拡張エフェメリスを演算するために必要とされる他の要素ステージは切られない。「LTCSMを演算する」セッション304は、演算(例えば、軌道積分、座標変換、ケプラー解法)を続けることが可能である。
【0059】
次の数時間をカバーするそれらの拡張エフェメリスだけが、演算される必要がある。今後の日または週を演算することは、ユーザが数分だけ戻ってきて電源を入れる要求をするという努力の浪費になる。典型的なハードウェアの実施では、RFステージ202は15mAの電源、DSPステージ204は30mAを消費することがあり、ARM-9ステージ206は僅か5mAしか必要とせず、TCXOステージ208は3mAを使用し、フラッシュ・メモリ210は2mAを必要とする。従って、バックグラウンド処理は、バッテリからの比較的非常に少ない電力消費でなされることができる。1ボルトのコアを使用して、これは、10mWにまで積み上げられる。
【0060】
更新処理116およびスケジューラ210に使用することができる1つの方策は、ユーザが電源を切ることを要求するまでLTCSMライブラリ118の如何なる更新も行なわないことである。その後、演算することができるLTCSMは、LTCSMを演算するセッション304中に演算される。そのような方策に伴うリスクは、ユーザが非常に長い時間、電源を切らない場合があることである。そして、LTCSMライブラリ118の全体または一部が期限切れになることがある。そのリスクを緩和すべく、LTCSMライブラリ118の最後の更新から経過を許容される最大時間に制限を課し、演算は、航法セッション302中にバックグラウンド・モードで継続される。代わりに、様々な要素LTCSMが、それらが期限切れとなったときに検査され、そして、それらの期限を逃れるために更新が予定される。
【0061】
航法セッション306は、SV122から直ちに利用可能にならない幾つかの現在のエフェメリスにも拘わらず、航法処理120が位置fix124を提供することを可能にする、LTCSMライブラリ118における実行可能なLTCSMがあることに少なくとも部分的に依存することを表わしている。
【0062】
本発明は、現在のところ好ましい実施形態の点から記述されたが、本開示が、限定するものと解釈されるべきでないことが理解される。様々な変更および修正が、疑いなく、上記の開示を読んだ後で当業者に明白となる。従って、添付した特許請求の範囲が本発明の範囲内に該当するような変更および修正をすべて包含すると解釈されることを意図している。
【符号の説明】
【0063】
100、200 GPS航法受信機
102、122 GPS衛星ビークル(SV)
104 プロセッサ
106 エフェメリスおよびアルマナックの完全なコレクション
108 マイクロコンピュータ
110 軌道積分アルゴリズム・プログラム・コード
112 力モデル
114 座標変換プログラム・コード
115 ケプラー解法プログラム・コード
116 更新処理
118 LTCSMライブラリ
120 未来の航法解処理
124 位置fix
202 無線周波数(RF)ステージ
204 デジタル信号処理(DSP)ステージ
206 ARM-9プロセッサ・コア
208 温度制御水晶発振器(TCXO)
210 フラッシュ・メモリ
212 スケジューラ
214 バッテリ
【特許請求の範囲】
【請求項1】
軌道上のナビゲーション・システム衛星からマイクロ波伝送を受信し、それらのナビゲーション・システム衛星用のエフェメリスを含んだ航法メッセージを復調することが可能な完全自律型の衛星航法受信機を備えた拡張エフェメリス航法受信機において、
特定の衛星ビークル(SV)に作用する加速度の力モデルを備え、該力モデルは、前記受信機にのみ配置され、各SVに対するエフェメリスについての単一の観測が、入力され、その対応する力モデルで各SVの軌道位置を積分することによって今後何日かに伝搬され、
それぞれのSVからの前記航法メッセージをそうでなければ直ちに得て復調することができない場合、完全自律型の衛星航法受信機は、その後それに利用可能となる、代替物として使用することができる拡張エフェメリス予測値を有する拡張エフェメリス航法受信機。
【請求項2】
前記完全自律型の衛星航法受信機に配置された機能制限付きマイクロコンピュータと、
該機能制限付きマイクロコンピュータ上で実行され、比較的僅かな演算努力で常微分方程式(ODE)に対する高精度な数値解を得るために、リチャードソン外装法と、該リチャードソン型の用途での有理関数外装法の使用と、中点法とを組み合わせたBulirsch-Stoer型アルゴリズムを使用することによって、そうでなければ生じ得る演算負荷を低減する軌道積分アルゴリズム・プログラム・コードとをさらに備え、
前記Bulirsch-Stoer型アルゴリズムは、2ステップだけが各々の積分サンプリング期間に対して必要とされ、前記力モデルの加速度は、各サンプリング期間で2回だけ演算される必要があり、従来のBulirsch-Stoer法の外装法ステージの介在物は不必要とされる請求項1記載の拡張エフェメリス航法受信機。
【請求項3】
前記完全自律型の衛星航法受信機に配置された機能制限付きマイクロコンピュータと、
該機能制限付きマイクロコンピュータ上で実行され、地球中心・地球固定(ECEF)座標系における一連のX−Y−Z型SV位置サンプルに最も良く適合するエフェメリス・パラメータと等価な、
【数5】
における15個のケプラー・パラメータの推定値を演算するケプラー解法プログラム・コードとをさらに備え、
前記エフェメリス・パラメータは、長期コンパクト衛星モデル(LTCSM)としてローカル・メモリにおけるコンパクトな記憶を可能にし、位置fixを演算する際には、前記機能制限付きマイクロコンピュータが今後の何日かを模擬する努力を要しない請求項1記載の拡張エフェメリス航法受信機。
【請求項4】
前記軌道積分アルゴリズム・プログラム・コードが前記機能制限付きマイクロコンピュータ上での実行をスケジュールされる際に管理し、前記実行を最前面またはバックグラウンドで行ない、電力を抑えるべく前記受信機のハードウェアの様々な部分に供給される動作電力を制御するスケジューラをさらに備える請求項1記載の拡張エフェメリス航法受信機。
【請求項5】
前記完全自律型の衛星航法受信機に配置された機能制限付きマイクロコンピュータと、
該機能制限付きマイクロコンピュータによって実行される座標変換プログラム・コードとをさらに備え、
2つの座標系が軌道積分演算に使用され、
ECEFからICRFへのおよびICRFからECEFへの座標変換は、4つの四元数回転と、地球方位パラメータ(EOP)に基づく極運動回転四元数とを含んでいる請求項1記載の拡張エフェメリス航法受信機。
【請求項6】
前記極運動回転四元数に対する最新のEOP正弦関数の多項式を取得し、使用する装置をさらに備える請求項1記載の拡張エフェメリス航法受信機。
【請求項7】
軌道上のナビゲーション・システム衛星からマイクロ波伝送を受信し、それらのナビゲーション・システム衛星用のエフェメリスを含んだ航法メッセージを復調することが可能な完全自律型の衛星航法受信機と、
前記完全自律型の衛星航法受信機に配置された機能制限付きマイクロコンピュータとを備えた拡張エフェメリス航法受信機において、
特定の衛星ビークル(SV)に作用する加速度の力モデルであって、該力モデルが、前記受信機にのみ配置され、各SVに対するエフェメリスについての単一の観測が、入力され、その対応する力モデルで各SVの軌道位置を積分することによって今後何日かに伝搬されることと、
前記機能制限付きマイクロコンピュータ上で実行され、比較的僅かな演算努力で常微分方程式(ODE)に対する高精度な数値解を得るために、リチャードソン外装法と、該リチャードソン型の用途での有理関数外装法の使用と、中点法とを組み合わせたBulirsch-Stoer型アルゴリズムを使用することによって、そうでなければ生じ得る演算負荷を低減する軌道積分アルゴリズム・プログラム・コードと、
該機能制限付きマイクロコンピュータ上で実行され、地球中心・地球固定(ECEF)座標系における一連のX−Y−Z型SV位置サンプルに最も良く適合するエフェメリス・パラメータと等価な、
【数6】
における15個のケプラー・パラメータの推定値を演算するケプラー解法プログラム・コードと、
前記機能制限付きマイクロコンピュータによって実行される座標変換プログラム・コードと、
前記軌道積分アルゴリズム・プログラム・コードが前記機能制限付きマイクロコンピュータ上での実行をスケジュールされる際に管理し、前記実行を最前面またはバックグラウンドで行ない、電力を抑えるべく前記受信機のハードウェアの様々な部分に供給される動作電力を制御するスケジューラと、
前記極運動回転四元数に対する最新のEOP正弦関数の多項式を取得し、使用する装置とを備え、
それぞれのSVからの前記航法メッセージをそうでなければ直ちに得て復調することができない場合、完全自律型の衛星航法受信機は、その後それに利用可能となる、代替物として使用することができる拡張エフェメリス予測値を有し、
前記Bulirsch-Stoer型アルゴリズムは、2ステップだけが各々の積分サンプリング期間に対して必要とされ、前記力モデルの加速度は、各サンプリング期間で2回だけ演算される必要があり、従来のBulirsch-Stoer法の外装法ステージの介在物は不必要とされ、
前記エフェメリス・パラメータは、長期コンパクト衛星モデル(LTCSM)としてローカル・メモリにおけるコンパクトな記憶を可能にし、位置fixを演算する際には、前記機能制限付きマイクロコンピュータによる未来の模擬を単純化し、
2つの座標系が軌道積分演算に使用され、ECEFからICRFへのおよびICRFからECEFへの座標変換は、4つの四元数回転と、地球方位パラメータ(EOP)に基づく極運動回転四元数とを含んでいる拡張エフェメリス航法受信機。
【請求項1】
軌道上のナビゲーション・システム衛星からマイクロ波伝送を受信し、それらのナビゲーション・システム衛星用のエフェメリスを含んだ航法メッセージを復調することが可能な完全自律型の衛星航法受信機を備えた拡張エフェメリス航法受信機において、
特定の衛星ビークル(SV)に作用する加速度の力モデルを備え、該力モデルは、前記受信機にのみ配置され、各SVに対するエフェメリスについての単一の観測が、入力され、その対応する力モデルで各SVの軌道位置を積分することによって今後何日かに伝搬され、
それぞれのSVからの前記航法メッセージをそうでなければ直ちに得て復調することができない場合、完全自律型の衛星航法受信機は、その後それに利用可能となる、代替物として使用することができる拡張エフェメリス予測値を有する拡張エフェメリス航法受信機。
【請求項2】
前記完全自律型の衛星航法受信機に配置された機能制限付きマイクロコンピュータと、
該機能制限付きマイクロコンピュータ上で実行され、比較的僅かな演算努力で常微分方程式(ODE)に対する高精度な数値解を得るために、リチャードソン外装法と、該リチャードソン型の用途での有理関数外装法の使用と、中点法とを組み合わせたBulirsch-Stoer型アルゴリズムを使用することによって、そうでなければ生じ得る演算負荷を低減する軌道積分アルゴリズム・プログラム・コードとをさらに備え、
前記Bulirsch-Stoer型アルゴリズムは、2ステップだけが各々の積分サンプリング期間に対して必要とされ、前記力モデルの加速度は、各サンプリング期間で2回だけ演算される必要があり、従来のBulirsch-Stoer法の外装法ステージの介在物は不必要とされる請求項1記載の拡張エフェメリス航法受信機。
【請求項3】
前記完全自律型の衛星航法受信機に配置された機能制限付きマイクロコンピュータと、
該機能制限付きマイクロコンピュータ上で実行され、地球中心・地球固定(ECEF)座標系における一連のX−Y−Z型SV位置サンプルに最も良く適合するエフェメリス・パラメータと等価な、
【数5】
における15個のケプラー・パラメータの推定値を演算するケプラー解法プログラム・コードとをさらに備え、
前記エフェメリス・パラメータは、長期コンパクト衛星モデル(LTCSM)としてローカル・メモリにおけるコンパクトな記憶を可能にし、位置fixを演算する際には、前記機能制限付きマイクロコンピュータが今後の何日かを模擬する努力を要しない請求項1記載の拡張エフェメリス航法受信機。
【請求項4】
前記軌道積分アルゴリズム・プログラム・コードが前記機能制限付きマイクロコンピュータ上での実行をスケジュールされる際に管理し、前記実行を最前面またはバックグラウンドで行ない、電力を抑えるべく前記受信機のハードウェアの様々な部分に供給される動作電力を制御するスケジューラをさらに備える請求項1記載の拡張エフェメリス航法受信機。
【請求項5】
前記完全自律型の衛星航法受信機に配置された機能制限付きマイクロコンピュータと、
該機能制限付きマイクロコンピュータによって実行される座標変換プログラム・コードとをさらに備え、
2つの座標系が軌道積分演算に使用され、
ECEFからICRFへのおよびICRFからECEFへの座標変換は、4つの四元数回転と、地球方位パラメータ(EOP)に基づく極運動回転四元数とを含んでいる請求項1記載の拡張エフェメリス航法受信機。
【請求項6】
前記極運動回転四元数に対する最新のEOP正弦関数の多項式を取得し、使用する装置をさらに備える請求項1記載の拡張エフェメリス航法受信機。
【請求項7】
軌道上のナビゲーション・システム衛星からマイクロ波伝送を受信し、それらのナビゲーション・システム衛星用のエフェメリスを含んだ航法メッセージを復調することが可能な完全自律型の衛星航法受信機と、
前記完全自律型の衛星航法受信機に配置された機能制限付きマイクロコンピュータとを備えた拡張エフェメリス航法受信機において、
特定の衛星ビークル(SV)に作用する加速度の力モデルであって、該力モデルが、前記受信機にのみ配置され、各SVに対するエフェメリスについての単一の観測が、入力され、その対応する力モデルで各SVの軌道位置を積分することによって今後何日かに伝搬されることと、
前記機能制限付きマイクロコンピュータ上で実行され、比較的僅かな演算努力で常微分方程式(ODE)に対する高精度な数値解を得るために、リチャードソン外装法と、該リチャードソン型の用途での有理関数外装法の使用と、中点法とを組み合わせたBulirsch-Stoer型アルゴリズムを使用することによって、そうでなければ生じ得る演算負荷を低減する軌道積分アルゴリズム・プログラム・コードと、
該機能制限付きマイクロコンピュータ上で実行され、地球中心・地球固定(ECEF)座標系における一連のX−Y−Z型SV位置サンプルに最も良く適合するエフェメリス・パラメータと等価な、
【数6】
における15個のケプラー・パラメータの推定値を演算するケプラー解法プログラム・コードと、
前記機能制限付きマイクロコンピュータによって実行される座標変換プログラム・コードと、
前記軌道積分アルゴリズム・プログラム・コードが前記機能制限付きマイクロコンピュータ上での実行をスケジュールされる際に管理し、前記実行を最前面またはバックグラウンドで行ない、電力を抑えるべく前記受信機のハードウェアの様々な部分に供給される動作電力を制御するスケジューラと、
前記極運動回転四元数に対する最新のEOP正弦関数の多項式を取得し、使用する装置とを備え、
それぞれのSVからの前記航法メッセージをそうでなければ直ちに得て復調することができない場合、完全自律型の衛星航法受信機は、その後それに利用可能となる、代替物として使用することができる拡張エフェメリス予測値を有し、
前記Bulirsch-Stoer型アルゴリズムは、2ステップだけが各々の積分サンプリング期間に対して必要とされ、前記力モデルの加速度は、各サンプリング期間で2回だけ演算される必要があり、従来のBulirsch-Stoer法の外装法ステージの介在物は不必要とされ、
前記エフェメリス・パラメータは、長期コンパクト衛星モデル(LTCSM)としてローカル・メモリにおけるコンパクトな記憶を可能にし、位置fixを演算する際には、前記機能制限付きマイクロコンピュータによる未来の模擬を単純化し、
2つの座標系が軌道積分演算に使用され、ECEFからICRFへのおよびICRFからECEFへの座標変換は、4つの四元数回転と、地球方位パラメータ(EOP)に基づく極運動回転四元数とを含んでいる拡張エフェメリス航法受信機。
【図1】

【図2】
【図3】

【図2】
【図3】
【公開番号】特開2012−53041(P2012−53041A)
【公開日】平成24年3月15日(2012.3.15)
【国際特許分類】
【出願番号】特願2011−174216(P2011−174216)
【出願日】平成23年8月9日(2011.8.9)
【出願人】(000166247)古野電気株式会社 (441)
【出願人】(501396026)イーライド,インク. (10)
【氏名又は名称原語表記】eRide,Inc.
【住所又は居所原語表記】One Letterman Drive,Bldg.C,Suite 310 The Presidio of San Francisco San Francisco,CA USA
【Fターム(参考)】
【公開日】平成24年3月15日(2012.3.15)
【国際特許分類】
【出願日】平成23年8月9日(2011.8.9)
【出願人】(000166247)古野電気株式会社 (441)
【出願人】(501396026)イーライド,インク. (10)
【氏名又は名称原語表記】eRide,Inc.
【住所又は居所原語表記】One Letterman Drive,Bldg.C,Suite 310 The Presidio of San Francisco San Francisco,CA USA
【Fターム(参考)】
[ Back to top ]