
自己較正
本発明は、読取り体積(reading volume)内に配列される物品からシグネチャを決定するように操作可能な装置を提供できる。装置は、焦束された非コヒーレント光線を生成し該光線を読取り体積の複数の異なる領域の各々上へ順序に導くことが可能な発生器と、読取り体積の異なる領域から光線が散乱するときに、得られた信号からデータ点のグループから成るセットを集めるように操作可能な検出器配置構成(detector arrangement)であってデータ点のグループのうち異なるものが読取り体積のそれぞれの異なる領域からの散乱に関連する検出器配置構成と、データ点のグループのセットから物品のシグネチャを決定するように操作可能なデータ収集処理モジュールと、を備える。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、認証(authentication)に関し、特に、排他的ではないが、非コヒーレント放射線源を用いる認証及び確認に使用される信頼可能で且つ再生可能なシグネチャ生成を達成することに関する。
【背景技術】
【0002】
物品の真贋判定を行う分野では、物品用の弁別器(identifier)に頼るのは周知のことである。
物理的特性に基づく弁別器を使用することができ、これらは、埋め込まれた反射粒子(国際公開第02/50790A1号、米国特許第6584214号)または物品の非改質表面(国際公開第2005/088533号)を含むものとしてよい。物性に基づく弁別器(identifier)が、使うことができる。従来、この分野の発明者の発明は、コヒーレント光線で表面を照らすことによって、物品の変更されていない表面から弁別器を決定することに関連してきた。その他(国際公開第2006/021083号)としては、変更された物品及び変更されていない物品を有するターゲットへの刺激を示すためにLEDソースの使用が提案された。しかしながら、国際公開第2006/021083号において、提案された配置構成は、高い認証信頼性を有する有用な装置の作製に用いることは極めて困難である。
【0003】
弁別器に基づく認証結果を提供するためには、認証される物品からの読取りを格納された読取り結果と比較する必要がある。この比較のために、マッチ発見アルゴリズム(match finding algorithm)が使用される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】国際公開第02/50790A1号
【特許文献2】米国特許第6,584,214号
【特許文献3】国際公開第2005/088533号
【特許文献4】国際公開第2006/021083号
【特許文献5】英国特許第0405641.2号
【特許文献6】英国特許第2411954号
【特許文献7】英国特許第0418138.4号
【特許文献8】英国特許第2417707号
【特許文献9】米国特許第60/601,464号
【特許文献10】米国特許第60/601,463号
【特許文献11】米国特許第60/610,075号
【特許文献12】英国特許第0418178.0号
【特許文献13】英国特許第2417074号
【特許文献14】米国特許第60/601,219号
【特許文献15】英国特許第0418173.1号
【特許文献16】英国特許第2417592号
【特許文献17】米国特許第60/601,500号
【特許文献18】英国特許第0509635.9号
【特許文献19】英国特許第2426100号
【特許文献20】米国特許第60/679,892号
【特許文献21】英国特許第0515464.6号
【特許文献22】英国特許第2428846号
【特許文献23】米国特許第60/702,746号
【特許文献24】英国特許第0515461.2号
【特許文献25】英国特許第2429096号
【特許文献26】米国特許第60/702,946号
【特許文献27】英国特許第0515465.3号
【特許文献28】英国特許第2429092号
【特許文献29】米国特許第60/702,897号
【特許文献30】英国特許第0515463.8号
【特許文献31】英国特許第2428948号
【特許文献32】米国特許第60/702,742号
【特許文献33】英国特許第0515460.4号
【特許文献34】英国特許第2429095号
【特許文献35】米国特許第60/702,732号
【特許文献36】英国特許第0515462.0号
【特許文献37】英国特許第2429097号
【特許文献38】米国特許第60/704,354号
【特許文献39】英国特許第0518342.1号
【特許文献40】英国特許第2429950号
【特許文献41】米国特許第60/715,044号
【特許文献42】英国特許第0522037.1号
【特許文献43】英国特許第2431759号
【特許文献44】米国特許第60/731,531号
【特許文献45】英国特許第0526420.5号
【特許文献46】英国特許第2433632号
【特許文献47】米国特許第60/753,685号
【特許文献48】英国特許第0526662.2号
【特許文献49】米国特許第60/753,633号
【特許文献50】英国特許第0600828.8号
【特許文献51】英国特許第2434442号
【特許文献52】米国特許第60/761,870号
【特許文献53】英国特許第0611618.0号
【特許文献54】英国特許第2440386号
【特許文献55】米国特許第60/804,537号
【特許文献56】英国特許第0711461.4号
【特許文献57】英国特許第2450131号
【特許文献58】米国特許第60/943,801号
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は、既存のシステムの知られている短所を考慮して企図された。
【課題を解決するための手段】
【0006】
第1の態様からみると、本発明は、読取り体積内に配置される物品からシグネチャを決定するための装置を提供する。本装置には、集束された非コヒーレント光線を生成して順次に読取り体積の複数の異なる領域の各々上に導くように動作可能な発生器を備える。本装置は、前記光線が前記読取り体積の異なる領域からが散乱するときに得られた信号から一群のデータ点からなるセットを集めるように動作可能な検出器配列構成であって異なる前記一群のデータ点が前記読取り体積のそれぞれの異なる領域からの散乱に関連する検出器装置と、前記一群のデータ点のセットから物品のシグネチャを決定するように動作可能なデータ収集および処理モジュールと、を更に備える。このことにより、レーザー照明を用いずに、信頼性が高く且つ再生可能なシグネチャが物品の表面に対して得られることが可能である。
【0007】
いくつかの実施例において、発生器はがLEDアレイのような構造化光源を備える。他の実施例において、発生器は、例えば単一のLED、蛍光灯またはフィラメント灯のような熱光源のような非構造化光源から成る。このように様々な異なる非コヒーレント照明光源が用いられ得る。
【0008】
いくつかの実施例において、発生器は前記光線を集光させて前記読取り体積内に細長い焦点を得るように動作可能である。いくつかの実施例において、前記細長い焦点の短い寸法が100μm未満である。他の実施例において、前記細長い焦点の短い寸法が50μm未満である。いくつかの実施例において、前記細長い焦点の長い寸法が3mm〜50mmの範囲内であるこのようにターゲットの表面の比較的広い領域のスキャンは、狭く焦束された光線の単一のパスで実行できる。
【0009】
いくつかの実施例において、前記発生器は、前記非コヒーレント光線を平行化して該平行化された光線を集光させるための配置構成を備える。このように、光線は、次の集光させるステージでレーザー光線として扱われることができる。
【0010】
他の態様からみると、本発明は、読取り体積内に配置される物品からシグネチャを決定する方法を提供する。方法は、集光された非コヒーレント光線を読取り体積内の複数の異なる領域のそれぞれ上に順次に導くステップを備える。本方法は、前記光線が前記読取り体積の異なる領域から散乱するときに得られた信号からデータ点の群から成るセットを集めるステップであって該データ点の群の異なるものが前記読取り体積のそれぞれの異なる領域からの散乱に関するステップと、前記データ点の群のセットから前記物品のシグネチャを決定するステップと、を更に備える。ことにより、レーザー照明を用いずに物品の表面に対して信頼でき且つ再生可能なシグネチャを得られることが可能である。
【0011】
いくつかの実施例において、前記非コヒーレント光線が例えばLEDアレイの構造化光源からのものである。いくつかの実施例において、前記非コヒーレント光線が例えば単一のLED、蛍光灯又はフィラメント灯等の熱光源のような非構造化光源からのものある。このように、様々な異なる非コヒーレント照明光源が、用いられることが可能である。
【0012】
いくつかの実施例において、本方法は、前記光線を集光させて前記読取り体積内に細長い焦点を得るステップを更に備える。いくつかの実施例において、前記細長い焦点の短い寸法が100μm未満である。他の実施例において、前記細長い焦点の短い寸法が50μm未満である。いくつかの実施例において、前記細長い焦点の長い寸法が3mm〜50mmの範囲内にある。このように、ターゲットの比較的広い領域のスキャンが、狭く焦束された光線の単一のパスによって実行される。
【0013】
いくつかの実施例において、本方法は、前記非コヒーレント光線を平行化して該コリメートビームを集光させるステップを更に含む。このように、光線は、次の集光させるステージによってレーザー光線として扱われることができる。本発明の他の目的および利点は、以下の説明および付属の請求項から明らかになるであろう。
【0014】
本発明をよく理解するために、またどのように実行に移すかを示すために、例えば付属の図面を参照することにする。
【図面の簡単な説明】
【0015】
【図1】読取り装置の側面略図である。
【図2】構造化された光源配列構成(source arrangemen)の概略図である。
【図3】構造化されていない光源配列構成の概略図である。
【図4】構造化されていない光源配置構成の概略図である。
【図5】読取り装置の機能的な構成要素のブロック略図である。
【図6】紙表面の顕微鏡イメージである。
【図7】非法線入射への抵抗に対する検出器開口数の効果を示す図である。
【図8】物品のシグネチャがスキャンからどのように生成されうるかを示す流れ図である。
【図9a】収集されたデータに対するハイコントラスト遷移の効果を示す略図である。
【図9b】収集されたデータに対するハイコントラスト遷移の効果を示す略図である。
【図9c】収集されたデータに対するハイコントラスト遷移の効果を示す略図である。
【図10】ビットマッチ比(bit match ratio)に対するハイコントラスト遷移の効果を示す略図である。
【図11a】遷移の上限を定める段階による収集されたデータに対するハイコントラスト遷移の効果の軽減を示す略図である。
【図11b】遷移の上限を定める段階による収集されたデータに対するハイコントラスト遷移の効果の軽減を示す略図である。
【図11c】遷移の上限を定める段階による収集されたデータに対するハイコントラスト遷移の効果の軽減を示す略図である。
【図12】遷移の上限を定める段階をどのように実行できるかを示す流れ図である。
【図13a】多数の大きな遷移を持つ表面からのデータに対する遷移の上限を定める段階の効果を示す図である。
【図13b】多数の大きな遷移を持つ表面からのデータに対する遷移の上限を定める段階の効果を示す図である。
【図14a】大きな遷移のない表面からのデータに対する遷移の上限を定める段階の効果を示す図である。
【図14b】大きな遷移のない表面からのデータに対する遷移の上限を定める段階の効果を示す図である。
【図15】スキャンから得られた物品のシグネチャがシグネチャデータベースと突き合わせてどのように検証できるかを示す流れ図である。
【図16】ビットマッチ比に対するハイコントラスト遷移の効果をどのように軽減できるかを示す略図である。
【図17】検証を目的として文書をスキャンする全体的プロセスおよびユーザーに提示される結果を示す流れ図である。
【図18】焦点を変える効果を視覚的に示す図である。
【図19A】異なる光源を用いた再現性を視覚的に示す図である。
【図19B】異なる光源を用いた再現性を視覚的に示す図である。
【図19C】異なる光源を用いた再現性を視覚的に示す図である。
【図19D】異なる光源を用いた再現性を視覚的に示す図である。
【図20】コヒーレント光源及び非コヒーレント光源を用いて反射の相対的な強度を視覚的に示す図である。
【図21】スキャン間のミスアライメント(misalignment)の視覚的に効果を示す図である。
【図22】コヒーレント及び非コヒーレント光源を用いた相対的な全体の動作を視覚的に示す図である。
【図23a】スキャン中の非理想性(non−idealities)を説明するように図18の検証プロセスを変更する方法を示す流れ図である。
【図23b】スキャン中の非理想性を説明するように図15の検証プロセスを変更する方法の他の例を示す流れ図である。
【図24A】スキャンで集めた相互相関データの一例を示す図である。
【図24b】スキャンされた物品が歪んでいる場合にスキャンで集めた相互相関データの一例を示す図である。
【図24C】スキャンされた物品が非線形速度でスキャンされた場合にスキャンで集めた相互相関データの一例を示す図である。
【発明を実施するための形態】
【0016】
本発明は、さまざまな修正および代替的形態により異なるが、特定の実施形態は、図面の実施例で示され、本明細書で詳細に説明される。しかし、図面およびその詳細説明は、本発明を開示されている特定の形態に限定することを意図していないが、それどころか、本発明は、付属の請求項により定められているような本発明の精神および範囲内に収まるすべての修正形態、等価形態、および代替え形態を対象とする。
【0017】
物品を一意に弁別するための正確な方法を提供するために、物品の表面からの光の反射に頼るシステムを使用することが可能である。このようなシステムの一例について、図1から24を参照しつつ説明する。
【0018】
本明細書で説明されている例示的なシステムは、lngenia Technologies Ltd.が開発し、販売しているものである。このシステムは、用紙、IDカードまたはパスポート、セキュリティシール、ペイメントカードなど、紙、段ボール、プラスチック、または金属品のランダム表面パターン形成を分析して与えられた物品を一意に弁別するように動作可能である。本システムは、多数の公開特許出願において詳しく説明されており、これらの公開特許出願は、例えば、2004年3月12日に出願した英国特許第0405641.2号(2005年9月14日に英国特許第2411954号として公開)、2004年8月13日に出願した英国特許第0418138.4号(2006年3月8日に英国特許第2417707号として公開)、2004年8月13日に出願した米国特許第60/601,464号、2004年8月13日に出願した米国特許第60/601,463号、2004年9月15日に出願した米国特許第60/610,075号、2004年8月13日に出願した英国特許第0418178.0号(2006年2月15日に英国特許第2417074号として公開)、2004年8月13日に出願した米国特許第60/601,219号、2004年8月13日に出願した英国特許第0418173.1号(2006年3月1日に英国特許第2417592号として公開)、2004年8月13日に出願した米国特許第60/601,500号、2005年5月11日に出願した英国特許第0509635.9号(2006年11月15日に英国特許第2426100号として公開)、2005年5月11日に出願した米国特許第60/679,892号、2005年7月27日に出願した英国特許第0515464.6号(2007年2月7日に英国特許第2428846号として公開)、2005年7月27日に出願した米国特許第60/702,746号、2005年7月27日に出願した英国特許第0515461.2号(2007年2月14日に英国特許第2429096号として公開)、2005年7月27日に出願した米国特許第60/702,946号、2005年7月27日に出願した英国特許第0515465.3号(2007年2月14日に英国特許第2429092号として公開)、2005年7月27日に出願した米国特許第60/702,897号、2005年7月27日に出願した英国特許第0515463.8号(2007年2月7日に英国特許第2428948号として公開)、2005年7月27日に出願した米国特許第60/702,742号、2005年7月27日に出願した英国特許第0515460.4号(2007年2月14日に英国特許第2429095号として公開)、2005年7月27日に出願した米国特許第60/702,732号、2005年7月27日に出願した英国特許第0515462.0号(2007年2月14日に英国特許第2429097号として公開)、2005年7月27日に出願した米国特許第60/704,354号、2005年9月8日に出願した英国特許第0518342.1号(2007年3月14日に英国特許第2429950号として公開)、2005年9月8日に出願した米国特許第60/715,044号、2005年10月28日に出願した英国特許第0522037.1号(2007年5月2日に英国特許第2431759号として公開)、2005年10月28日に出願した米国特許第60/731,531号、2005年12月23日に出願した英国特許第0526420.5号(2007年7月27日に英国特許第2433632号として公開)、2005年12月23日に出願した米国特許第60/753,685号、2005年12月23日に出願した英国特許第0526662.2号、2005年12月23日に出願した米国特許第60/753,633号、2006年1月16日に出願した英国特許第0600828.8号(2007年7月25日に英国特許第2434442号として公開)、2006年1月25日に出願した米国特許第60/761,870号、2006年6月12日に出願した英国特許第0611618.0号(2008年1月30日に英国特許第2440386号として公開)、2006年6月12日に出願した米国特許第60/804,537号、2007年6月13日に出願した英国特許第0711461.4号(2008年12月17日に英国特許第2450131号として公開)、2006年6月13日に出願した米国特許第60/943,801号を含み(すべてCowburnらが発明した)、これらの特許出願のそれぞれおよびすべての内容は、参照により本明細書に組み込まれる。
【0019】
示されているように、本発明はインジェニアテクノロジー社(lngenia Technologies Ltd.)の発明者の以前の作業に関連して開発された。しかしながら、先行する作業の多くはターゲットを照らすレーザー光源の使用に関する一方、本明細書における開示は、ターゲット表面を照らし、ターゲット表面からユニーク弁別器を得るレーザー光源以外の光源の使用に関する。
【0020】
図1は、読取り装置の側面略図である。光学式読取り装置1は、装置の読取り体積内に配列された物品(図示せず)からシグネチャを測定するものである。読取り体積は、筐体12内のスリットである読取り開口10により形成される。筐体12は、装置の主要光学コンポーネントを収納する。スリットは、x方向に大きな広がりを持つ(図面内の差し込み軸を参照)。主光学コンポーネントは、光線15を発生するための光源14およびこの例では、k=2として、16aおよび16bというラベルが付けられた複数のk個の光検出器要素からなる検出器配置構成16である。レーザー光線15は、集束配置構成18により、y方向に延在し(図面の平面に対し垂直)、読取り開口の平面内に置かれる引き延ばされた焦点に集束される。一例の読取り装置では、引き延ばされた焦点は、寸法約5mmの長軸および寸法約40マイクロメートルの短軸を有する。これらの光学コンポーネントは、サブアセンブリ20に収納される。示されている例では、検出器要素16a、16bは、読取り体積内に存在する物品から反射して散乱した光を集光するために光線軸から異なる角度でオフセットされた光線軸のいずれかの側に分配される。一例では、オフセット角は±45度であり、他の例では、この角度は−30から+50度までの範囲内である。光線軸のいずれかの側の角度は、集められるデータ点ができる限り独立したものとなるように等しくならないように選択されうる。しかし、実際には、これは操作に本質的なものではなく、検出器を入射光線のいずれかの側に等しい角度で有することは、完全に動作可能な配置構成をもたらすと判断された。検出器要素は、共通平面内に配列される。光検出器要素16aおよび16bは、コヒーレント光線が読取り体積から散乱したときに筐体上に配置されている物品から散乱された光を検出する。例示されているように、光源は、z方向に光線軸を持つレーザー光線15を方向付けるように取り付けられ、光線は法線入射で読取り開口内の物品に当たる。
【0021】
ターゲット表面に光線15の焦点を十分に密着して提供するために、非レーザー光源がどのように配置され得るかについて、幾つかの実施例を用いて以下説明する。
【0022】
図2は、光源が構造化光源(structured source)である配置構成を示す図である。この例で、構造化光源は、LED41の線形アレイである。線形アレイ41からの光は、レンズ42によって、細長いターゲット又は線形焦点43に焦束される。例示される実施形態において、光学配置構成では、アレイとレンズとの間に間隔と、レンズとターゲットとの間の間隔がレンズの焦点距離の2倍になっている。
距離に適用される一般原則は、
1/D1+1/D2=1/fA
ここで、fAはレンズの焦点距離であり、D1はレンズと光源との間の距離であり、D2はレンズと所望の焦点との間の距離である。
【0023】
図2の実施例において、構造化光源は、それぞれが15μm×22μmの寸法と44μmピッチとを有する256の個々のLED素子の線形LEDアレイである。図2の光学配置構成を用いて、線形焦点は、集光される線の幅が100μm未満であるところで得られる。焦点深度(depth of focus)は、所望の焦点サイズと実効開口数(effective numerical aperture)を含む他の要素に依存している。本実施形態において、500μmオーダーの焦点深度を直接に得ることができる。より大きな焦点深度は、光学配置構成を変えることによって、達成できる。
【0024】
他のLEDアレイサイズが、使われることもできる。LEDアレイの長さがターゲット上の線形焦点の所望の長さに対応しない場合、レンズ43は、線形焦点を引き延ばすように、配置されることができ、または追加レンズ素子が線形焦点を引き延ばすために用いることができる。
【0025】
図3は、例えばLED、フィラメント灯(熱光源)または蛍光灯44の非構造化光源を備える配置構成を示す。この実施例において、開口は、ランプ44により出射された光を「形づくって」、レンズ46が光を所望の引き延ばされた焦点又は線形焦点に焦束するように用いられる。例示される実施形態において、光学配列構成では、アレイとレンズとの間の間隔と、レンズとターゲットの間の間隔とがレンズの焦点距離の2倍になるようになっている。距離に適用される一般原則は、以下の通りである:
1/D1+1/D2=1/fA
fAはレンズの焦点距離であり、D1はレンズと光源との間の距離であり、D2はレンズと所望の焦点との間の距離である。
【0026】
図3の実施形態において、開口は、8mm×50μmの寸法を有する。図3の光学配置構成を用いることで、線形焦点は、集束された線の幅が100μm未満であるところで得ることができる。焦点深度は、所望の焦点サイズと実効開口数を含む他の要素に依存している。本実施形態において、500μmオーダーの焦点深度が直接に達成され得る。より大きな焦点深度は、光学配置構成を変えることによって、達成することが可能である。
【0027】
他の開口サイズが、使われることもできる。開口の長い軸がターゲット上の線形焦点の所望の長さに対応しない場合には、レンズ43は、線形焦点を引き延ばすように配置されることができ、または、追加レンズ素子が、線形焦点を引き延ばすために用いられることが可能である。
【0028】
図4は、非構造化光源の使用のための代替的な配置構成を示す。この例においても、非構造化光源は、例えばLED、フィラメント灯(熱光源)または蛍光灯44の光源である。光源44から出射された光は、開口47bと第2の平凸レンズ47cを介して光を焦束するように配置された平凸レンズ47aの配置構成によって、平行化されて、平行な出力を達成する。第1のレンズ47aと開口と間の間隔は、レンズ47aの焦点距離であり、開口と第2のレンズ47cと間の間隔は、レンズ47cの焦点距離である。一旦、配置構成47によって、平行化された光線が生成すると、平行化された光線が集光される方法と類似の方法で、平行化された光線は集束レンズ(focussing lens)48により焦束されることができる。本実施形態において、レンズ48は、所望の線形焦点への集光を提供し、円柱状レンズのようなレンズとして用いられる。
【0029】
図3および4の実施形態において、ソースは、構造化アレイ以外の配置されるLEDであることができ、所与の出力強度を得るために必要である場合には、複数のLEDを含むことができる。一実施例において、赤いスペクトルを有する光を出射するLEDが用いられ得る。光源は、代替的にフィラメント灯(白熱灯または熱ソース)であることができ、所与の出力強度を得る必要である場合には、複数のランプを含むことができる。一実施例において、ハロゲン灯が使われることができる。また、光源は、蛍光灯、または放電ランプであることができ、所与の出力強度を得る必要である場合には、複数のランプを含むことができる。
【0030】
図1を再度参照すると、光線は、図2、図3および図4に関して説明したもののうちの1つのような集束配置構成によって、(図面の平面と直角をなす)y方向において、延在していると共に読取り開口の平面にある細長い焦点に集光される。一実施例の読者において、細長い焦点は、約5mmの長軸寸法と、40マイクロメートルの短軸寸法とを有する。これらの光学部品は、サブアセンブリ20に含まれる。
【0031】
一般に、焦点深度は大きく、z方向に位置する物品に違いがある結果、読取り開口の平面内の光線のサイズが著しく変化しないことが望ましい。焦点深度、開口数、および作動距離のパラメータは、相互に依存しており、その結果、スポットサイズと焦点深度との間によく知られているトレードオフの関係が生じる。いくつかの配置構成では、焦点は調節可能であり、距離測定手段を用いることで、利用可能な被写界深度の範囲内に置かれている物品を狙うように焦点を調節することができる。
【0032】
ターゲット物品上の点の数を読み取れるようにするために、物品および読取り装置を、入射光線および関連する検出器がターゲット物品に相対的に移動できるように配列することができる。これは、物品、スキャナアセンブリ、またはその両方を移動させることによって配列することができる。いくつかの例では、物品を読取り装置筐体に隣接する適所に保持することができ、スキャナアセンブリが読取り装置内で移動して、この移動を引き起こしうる。あるいは、物品は、例えば、物品がコンベヤ上で移動するときに物品が固定位置スキャナを越えて移動する生産ラインの場合に、スキャナアセンブリを越えて移動することができる。他の代替的実施形態では、物品とスキャナの両方を静止状態に保持するが、指向性合焦手段により、非コヒーレント光線はターゲット上を横断して進行する。これは、検出器が光線とともに移動することを必要とするか、またはターゲット上の光線のすべての入射位置からの反射を受け取るように静止している検出器を位置決めすることができる。
【0033】
図5は、上述のような読取り装置の論理コンポーネントのブロック略図である。光発生器14は、制御およびシグネチャ生成ユニット36によって制御される。適宜、モーター22も、制御およびシグネチャ生成ユニット36によって制御されうる。適宜、何らかの形態の運動検出または線形化手段(19として示されている)が読取り装置を通り過ぎるターゲットの運動を測定するように、および/または相対的移動における非線形性を測定し、そうして説明するように実装されている場合、これは、制御およびシグネチャ生成ユニット36を使用して制御されうる。
【0034】
ターゲット表面スキャン領域からの集光された光線の反射は、光検出器16によって検出される。上述のように、いくつかの例では複数の光検出器を備えることができる。光検出器16からの出力は、アナログ/デジタルコンバータ(ADC)31によって2値化されてから、制御およびシグネチャ生成ユニット36に渡されて処理され、特定のターゲット表面スキャン領域に対するシグネチャを生成する。ADCは、データ取り込み回路の一部であるか、または独立したユニットであるか、または制御およびシグネチャ生成ユニット36のマイクロコントローラまたはマイクロプロセッサに一体化されうる。
【0035】
制御およびシグネチャ生成ユニット36は、集光光線存在入射配置情報を使用して、光検出器反射情報の集合毎にスキャン領域配置を決定することができる。これにより、スキャン領域のスキャンされる部分のすべてまたは選択された部分に基づくシグネチャを作成することができる。スキャン領域の全体ではなく一部がシグネチャに含まれる場合、シグネチャ生成ユニット36は、シグネチャを生成するときにスキャン領域の他の部分から受け取ったデータを単純に無視するだけである。あるいは、スキャン領域全体からのデータを、ターゲットからの画像型データの位置決めまたは収集などの他の目的に使用する場合、そのような追加の目的のためにデータセット全体が制御およびシグネチャ生成ユニット36によって使用され、その後、その追加の目的が完遂された後に保持されるか、または破棄されうる。
【0036】
これからわかるように、図5に示されているさまざまな論理要素は、さまざまな装置の組み合わせによって物理的に具現化されうる。例えば、いくつかの状況では、これらの要素のすべてをスキャン装置内に収めることができる。他の状況では、スキャン装置は、光発生器14、モーター22(もしあれば)、および光検出器16のみを備え、残りすべての要素を別の1つまたは複数の物理的ユニット内に配置することができる。論理要素の物理的分配の他の組み合わせも使用することができる。また、制御およびシグネチャ生成ユニット36をいくつかの独立した物理的ユニットに分割することもできる。例えば、光発生器14およびモーター(もしあれば)を実際に制御する第1のユニット、集光された光線の現在の入射配置の情報を計算する第2のユニット、シグネチャを生成するために使用されるスキャンデータを弁別する第3のユニット、およびシグネチャを実際に計算する第4の部分がありうる。
【0037】
ADC 31および/または制御およびシグネチャ生成ユニット36によって実行される処理ステップの一部または全部を、特定用途向け集積回路(ASIC)または専用アナログ処理回路などの専用処理配置構成を用いて実行することができる。代替えとして、またはそれに加えて、光線のADC 31および/または制御およびシグネチャ生成ユニット36によって実行される処理ステップの一部または全部を、従来のパーソナルコンピュータ、ポータブルコンピュータ、ハンドヘルドコンピュータ(例えば、パーソナルデジタルアシスタントつまりPDA)、またはスマートフォンで使用されているような、デジタルシグナルプロセッサまたは汎用プロセッサなどのプログラム可能な処理装置を使用して実行することができる。プログラム可能な処理装置が使用される場合、所望の機能をプログラム可能な装置に実行させるために1つまたは複数のソフトウェアプログラムを使用することができることは理解されるであろう。このようなソフトウェアプログラムは、磁気ディスクもしくは光ディスクなどの持ち運べる媒体上に、またはデータ通信チャネルを介して伝送される信号に具現化されうる。
【0038】
これらの例のシステムが読み取ることができる表面特性を示すために、図6および7には、紙製品とプラスチック製品の表面がそれぞれ示されている。
【0039】
図6は、画像が約0.5×0.2mmの面積を覆う紙表面の顕微鏡画像である。この図は、紙など、肉眼で見て平坦な表面が、多くの場合、顕微鏡スケールでは高度に構造化されていることを示すために含まれている。紙の場合、表面が紙を構成する木材または他の植物由来の繊維の互いに絡み合う網の結果として顕微鏡的に高度に構造化されている。この図は、さらに、10ミクロン程度の木材繊維に対する特性長スケールも例示している。この寸法は、非コヒーレント光線の光波長と正しい関係を有し、回折を引き起こし、また繊維の向きに依存するプロファイルを有する散漫散乱を引き起こす。したがって、読取り装置が特定の商品クラスに合わせて設計される場合、スキャンされる商品のクラスの構造特徴サイズに合わせて光の波長を修正することができることは理解されるであろう。また、それぞれの紙片の局所的表面構造が、個々の木材繊維がどのように配列されるかに依存するという点で独特であることは明白である。そのため、紙片は、自然の法則に従うプロセスにより作られた結果として独自の構造を有するという点で、従来技術の特別な樹脂トークンまたは磁気材料堆積などの特別に作られたトークンと決して異ならない。同じことが、他の多くの種類の物品にも当てはまる。
【0040】
図7は、プラスチックの表面に対する同様の画像である。この原子間力顕微鏡画像は、明らかに、肉眼で見て滑らかなプラスチック表面が凸凹していることを示している。図から推察できるように、この表面は、図6に例示されている紙表面よりも滑らかであるが、この微細レベルのプラスチック表面上の表面起伏でも、本発明の実施例のシグネチャ生成スキームを使用して一意に識別することができる。
【0041】
言い換えると、一意的な特性がさまざまな日常品から直接的な形で測定可能である場合に、専用のトークンを製作する労力と費用まで進むのは本質的に無意味である。物品の表面(または透過の場合には内部)の自然構造を利用する散乱信号のデータ収集および数値処理について説明する。
【0042】
上述の図1に示されているように、表面から反射する集束光は、多数の検出器16によって集光される。検出器は、検出器の領域一面にわたって反射光を受光する。反射光は、光の入射位置のところの表面に関する情報を含む。上述のように、この情報は、光顕レベルで表面の表面粗さに関する情報を含みうる。この情報は、反射光の観察されたパターン内の特徴の波長の形態で反射光によって伝えられる。これらの波長特徴を検出することによって、表面の表面構造に基づき指紋またはシグネチャを導出することができる。表面上の多数の位置で反射を測定することによって、指紋またはシグネチャは表面の大きなサンプルに基づくものとしてよく、これにより、後日表面を再度読み取った後に、後からの読取りで得られるシグネチャと最初の読取りで得られるシグネチャとのマッチングが容易になる。
【0043】
反射光は、2つの主角波長または角周波数領域における情報を含む。高い角周波数(短波長)情報は、従来からスペックルと呼ばれているものである。この高い角周波数成分は、典型的には、0.5度程度の角周期性を有する。典型的には、15度程度の角周期性を典型的には有する低角周波数(長波長)情報もある。
【0044】
上述のように、それぞれの光検出器は、θnと呼ばれる立体角上で反射光を集光する。本発明の説明では、それぞれの光検出器は正方形または円形の領域上で集光するものとする。集光の立体角は、光検出器16が異なれば異なる可能性がある。それぞれの光検出器16は、θrと呼ばれる表面からの最小角度を有する反射光を測定する。したがって、与えられた光検出器16によって検出された光は、θrからθr+θnまでの表面に関するある角度を有する反射光線を含む。以下でさらに詳しく説明するように、可能な最大の角度によって隔てられた検出器チャネルを有する点でなりすましに対抗できるシステムを形成することには有利な点があると思われる。これにより、角度θrはできる限り小さな角度になる。
【0045】
これからわかるように、光検出器16が反射光を検出する立体角θnは、
NA=sin(φ)
である開口数(NA)として表すこともできるが、
ただし、φは検出器を出入りすることができる最大光錐の半角である。したがって、本発明の例における検出器の開口数は、
NA=sin(θn/2)
である。そこで、大きな開口数を有する光検出器は、より多くの光量(つまり、より多くの光子)を集める可能性があるが、これは、すべての取り込まれた情報スペックルの総和が弱いものとなるように反射された情報(スペックル)のうちのより多くの情報を平均化する効果を有する。しかし、長角波長成分は、短角波長(従来のスペックル)成分に比べて平均化の影響を受けにくく、そのため、これは、長波長と短波長の反射信号の比を改善する効果を有する。
【0046】
図1には、集束コヒーレント光線は、表面に法線入射すると示されているけれども、実際には、完全な法線入射を保証することは困難な場合があることは理解されるであろう。これは、低コストの読取り装置が提供される状況、訓練をほとんど、または全く受けていないユーザーによって位置決めが実行される状況、または例えば、物品を運ぶコンベヤを含む、商業的処理環境など、物品の位置決めをユーザーがコントロールできない状況、および読取り装置から物品までの距離が、読取り装置と物品との間に物理的接触がないような距離である状況では、特に当てはまる。したがって、実際、ほぼ入射集束非コヒーレント光線が完全な法線方向から物品に当たることはないと言ってよい。
【0047】
図8は、物品のシグネチャがスキャンからどのように生成されうるかを示す流れ図である。
【0048】
ステップS1は、光検出器のそれぞれにおける光強度がスキャンの全長上にそったいくつもの位置で取得されるデータ収集ステップである。それと同時に、符号器信号は、時間の関数として取得される。スキャンモーターが非常に高い線形化精度(例えば、ステッパーモーターのように)を有する場合、またはデータ中の非線形性をブロック毎の分析またはテンプレートマッチングを通じて除去できる場合、データの線形化は必要ないと思われる。上記の図5を参照すると、データは、ADC 31からデータを取り出すシグネチャ生成器36により取得される。それぞれのスキャンで集められる光検出器1つ当たりのデータ点の個数は、以下においてNとして定義される。さらに、値ak(i)は、光検出器kからのi番目の格納されている強度値として定義され、iは、1からNまでの値を取る。
【0049】
ステップS2は、時間領域フィルターを取り込まれたデータに適用するオプションのステップである。本発明の例では、これは、ターゲットが集光光線以外の光源からの照射にも曝される場合に現れることが予想されるような50/60Hzおよび100/120Hz帯域の信号を選択的に除去するために使用される。これらの周波数は、螢光照明などの室内照明を駆動するためにごく普通に使用されるものである。
スキャンのための照明光源が、光源に電力を供給するために必要な如何なるAC周波数を除外しない、例えばフィラメント灯または蛍光灯の非構造化光源ことに注意されたい。
【0050】
ステップS3は、データのアライメントを実行する。いくつかの例では、このステップは、数値補間法を使用して、符号器遷移が均等な時間間隔で並ぶようにak(i)を局所的に拡大、縮小する。これは、モーター速度の局所的変動およびデータ中の他の非線形性の補正を行う。このステップは、シグネチャ生成器36によって実行されうる。
【0051】
いくつかの例では、スキャン領域が所定のパターンテンプレートに対応する場合に、取り込まれたデータを知られているテンプレートと比較し、並進および/または回転調節を取り込まれたデータに適用してテンプレートに合わせてデータのアライメントを行うことができる。また、引き伸ばしおよび収縮調節を取り込まれたデータに適用し、物品に相対的なスキャンヘッドの通過がテンプレートが構築されたのと異なる状況においてテンプレートに合わせてアライメントを行うことができる。したがって、線形スキャン速度を使用してテンプレートを構築する場合、速度の非線形性が存在しているデータのスキャンが実行された場合にテンプレートとマッチするようにスキャンデータを調節することができる。
【0052】
ステップS4は、信号強度に上限を定めるオプションの操作を適用し、テキスト印刷がなされている表面および例えばハーフトーン印刷がなされている表面を含む、例えば、高度な印刷表面を有する物品で発生する特定の問題に対処する。問題点は、非マッチ結果においてマッチスコアが増大し、これにより、非マッチ結果とマッチ結果との間の隔たりが縮小する傾向があるという点である。
【0053】
これは、結果として得られるシグネチャのそれぞれのビットのランダム性に関するスキャンされた表面に対する急激なコントラスト変化のランダム性のない効果によって引き起こされる。簡単に言うと、急激なコントラスト変化により、多数の非ランダムデータビットがシグネチャに入り、したがってこれらの非ランダムビットは同様の印刷がなされているか、または同様のパターンが形成された物品のスキャンで互いにマッチする。図10は、このプロセスをさらに詳しく示している。
【0054】
図9aは、物品上のスキャン領域50を示しており、スキャン領域は第1の表面色を有する2つの領域51および第2の表面色を有する領域52を有する。この表面色の遷移の効果は、図9bに示されており、そこでは、スキャン装置によって取り込まれた反射信号の強度がスキャン領域の長さにそってプロットされている。これからわかるように、強度は、第1の表面色が存在するときに第1のレベルに、第2の表面色が存在するときに第2のレベルに従う。第1および第2のレベルのそれぞれにおいて、信号強度に僅かな変動が生じる。これらの小さな変動は、シグネチャの導出元の情報コンテンツである。
【0055】
図9bの第1のレベルと第2のレベルとの間の階段状変化が結果として得られるシグネチャを実際に引き起こすという問題が、図9cに例示されている。図9cは、ACフィルター(ステップS4に関して以下で説明されている空間領域帯域通過フィルターなど)を適用した後の図9bからの強度データを示している。図9cから、2次フィルターなどの高次フィルターであっても、スキャン領域上の表面パターンのそれぞれの急激な遷移の後、小さな強度変動が喪失する領域が発生することは明らかである。したがって、領域53内のデータビット位置毎に、シグネチャで終わるデータビットの値は、それらの位置で実際に発生した強度の小さな変動に関係なく、ゼロになる。同様に、領域54内のデータビット位置毎に、シグネチャで終わるデータビットの値は、それらの位置で実際に発生した強度の小さな変動に関係なく、1になる。
【0056】
2つの類似の物品がスキャン領域上で公称的に同一の表面印刷またはパターン形成がなされていると予想できるので、そのような物品に対するすべてのシグネチャは、表面パターン/印刷/色の階段状変化に対応する位置においてシグネチャ内にすべて1および/またはすべて0のデータビットのほぼ同じ領域を有すると予想されうる。したがって、これらの領域により、異なる物品同士の比較に対する比較結果値が人工的に増加し、マッチ結果と非マッチ結果との間の隔たりが減少する。この減少した隔たりは、図13に例示されており、そこでは、単一の物品の異なるスキャン同士の比較に対するピーク(つまり、マッチ結果)が約99%のビットマッチ比を中心とするが、異なる物品のスキャンに対し比較が実行される第2の最良マッチに対するピークは約85%のビットマッチ比を中心とすることがわかる。通常の状況下では、この様な表面パターン形成効果が発生しない場合、非マッチピークは50%にかなり近づくと予想される。
【0057】
上で指摘されているように、このような遷移によって引き起こされるデータ損失を最小限に抑える第1のアプローチは、高次フィルターを使用して回復時間を最小にし、これによりそれぞれのスキャン表面遷移の影響を受けるシグネチャキットの個数を最小にする段階を伴う。
【0058】
この後説明されるように、そのスキャン表面のスキャンから導出されるシグネチャのビットに対するそのようなスキャン表面遷移の影響を最小にするさらに入り組んだアプローチを取ることもできる。特に、大きすぎてシグネチャをもたらす表面のテクスチャまたは粗さを表すいくつもの小さな変動のうちの1つの小さな変動となりえない強度変動が発生していることを検出するためのシステムを実装することができる。そのような遷移が検出された場合、遷移の大きさは、ACフィルターが適用されフィルターの回復時間をさらに短縮する前に、チョッピングされるか、または上限が定められうる。これは、図11に示されている。図11aは、図9aと同一であり、パターン形成された領域を持つスキャン領域を示している。図11bは、パターン形成された領域の間の遷移の上限を定められた大きさを示し、図11cは、結果としてすべて1およびすべて0のデータビットをもたらす領域55および56が図9cの対応する領域53および54に比べてかなり小さいことを示している。次いで、これにより、シグネチャの残り部分が基づく小さな変動を参照することなく表面パターン遷移の直接的な結果として0または1の値を採用するように強制されるシグネチャ内のビットの数が減らされる。
【0059】
そのような遷移を検出する最も簡単な方法の1つは、スキャンデータの比較対象とするテンプレートを持たせてスキャン長上にあるいくつかの点で自動的に遷移に上限を定めることなどによってそのような遷移がいつ現れるかを知るものである。このアプローチには、物品に対するスキャナの位置決めの誤りを考慮するようにスキャンデータに対しテンプレートのアライメントを行う必要があること、および使用すべきテンプレートを知るためにどのような種類の物品をスキャンするのかがスキャナ側に予め知られている必要があることという2つの短所がある。
【0060】
そのような遷移を検出するための他の方法では、大きな遷移を見つけるために例えば標準偏差に基づく計算を利用する。しかし、そのようなアプローチには、典型的に、遷移のない長い期間があるという問題があり、そのため、スキャンされた物品に何らかの/多数の遷移がない場合に誤差が入り込む可能性がある。
【0061】
このようなアプローチの欠点を解消するために、以下の技術を使用して、スキャン領域が印刷/パターン形成を含んでも含まなくても等しく正常に機能し、スキャンする物品を予め知っていることを必要としないシステムを構成することができる。こうして、本発明の例において、選択的なステップS4で取られるアプローチが図12に示されている。
【0062】
最初にステップD1において、強度値を微分して、一連の微分値を出力する。次いで、ステップD2で、値を低値で選択できるように微分値をパーセンタイルにより分析する。本発明の例では、従来通り50パーセンタイルが使用されうる。50パーセンタイルの前後または50パーセンタイル以下の他のパーセンタイル値も使用できる。
【0063】
次いで、ステップD3で、スケーリング係数により選択されたパーセンタイルで値をスケーリングすることによって閾値を決める。スケーリング係数は、経験的に導き出すことができるが、広範な表面材料タイプに対し1つのスケーリング係数が適用可能である。本発明の例では、2.5のスケーリング係数が、紙、段ボール、光沢紙、および光沢段ボールを含む、多くの異なる表面材料タイプに使用される。
【0064】
次いで、ステップD4で、微分値のすべてを閾値と比較する。閾値より大きい値を持つ微分をゼロ値に設定する。微分値の閾値チェックが済んだら、ステップD5で、修正された微分を再度積分する。
【0065】
本発明の例では、これらのステップはすべて、光検出器からのアナログデータを複数レベルのデジタル値に変換した後に実行される。光検出器がアナログ信号ではなくデジタル強度信号を出力する例では、2値化は不要である。
【0066】
したがって、このシステムは、大きすぎて表面のテクスチャ/粗さ応答とならない大きな遷移を見つけて、それらの遷移に上限を定め、テクスチャ/粗さ応答データが大きな遷移でマスクされるのを回避する。
【0067】
高度印刷表面からのデータに対するステップS4の効果は、図13aおよび13bに例示されている。図13aは、一連のハイコントラストストライプがスキャン方向を横断する表面から取り出されたデータに対して、選択的なステップS4を実行する直前のデータを示している。ステップS4による処理の後の同じデータセットが図13bに示されており、そこでは、保存される表面情報の量は、ハイコントラスト遷移にも関わらず高いことがわかる。
【0068】
比較により、図14aおよび14bは、S4で実装されたシステムは、ハイコントラスト印刷遷移なしではデータの問題を引き起こさないことを例示している。図14aは、平面から取り出されたデータに対して、ステップS4を実行する直前のデータを示している。ステップS4による処理の後の同じデータセットが図14bに示されており、そこでは、表面情報の量は、S4のプロセスを実行するにも関わらず減少しないことがわかる。
【0069】
ステップS5は、空間領域帯域通過フィルターを取り込まれたデータに適用する。このフィルターは、x方向(スキャンヘッドの移動方向)の一定範囲の波長を通す。フィルターは、サンプル間の減衰を最大にし、データ内の高い自由度を維持するように設計されている。これを念頭に置き、フィルター通過帯域の下限を、高速減衰が生じるように設定する。これは、ターゲット表面からの絶対強度値がシグネチャ生成の観点からは興味がないが、見かけ上類似の強度の領域間の変動は興味があるので必要である。しかし、減衰は、高速になりすぎるようには設定されず、そうすることで信号のランダム性を低減することができ、これにより、取り込まれたデータの自由度が減る。上限は、高く設定することができるが、ある種の高周波ノイズまたはx方向の値の間の何らかの平均化(スミアリング)に対する要求条件(y方向の値について上で述べたのとまったく同様に)がある場合があり、典型的には、高い上限以外には何も必要ない。いくつかの例では、2次フィルターを使用できる。一例では、ターゲット表面上を集光光線が移動する速度が、毎秒20mmである場合、フィルターは、100ミクロンのインパルス立ち上がり距離および500ミクロンのインパルス立ち下がり距離を有することができる。
【0070】
単純なフィルターを適用する代わりに、フィルターの異なる部分に重みを付けることが望ましい場合がある。一例において、適用される重み付けはかなり大きなものであり、微分などの実空間関数と同等のものを導入するために三角通過帯域を作成する。微分タイプの効果は、構造化の高い表面に対し有用であり、無相関の寄与分に関して信号からの相関のある寄与分(例えば、ターゲット上の表面印刷からの)を減衰させるために使用されうる。
【0071】
ステップS6は、2値化ステップであり、そこでは、複数レベルデジタル信号(ADCからの処理済みの出力)が2状態デジタル信号に変換され、スキャンを表すデジタルシグネチャを計算する。デジタルシグネチャは、本発明の例では、規則「ak(i)>平均は2進値「1」にマップされる」、および「ak(i)≦平均は2進値「0」にマップされる」を適用することにより得られる。2値化されたデータセットは、dk(i)として定義されるが、ただし、iは1からNまでの値を取る。物品のシグネチャは、有利には、説明したばかりの強度データの2値化されたシグネチャに加えて他のコンポーネントも含むことができる。次に、これらの他のオプションのシグネチャコンポーネントについて説明する。
【0072】
ステップS7は、小さな「サムネイル」デジタルシグネチャが作成されるオプションのステップである。いくつか例では、これは、m個の読取り値の隣接するグループをまとめて平均するか、またはcをサムネイルの圧縮係数としてc番目毎のデータ点をピックアップすることにより生成される実空間サムネイルとすることができる。後者の方法は、平均が雑音を不釣り合いに増幅する可能性があるため、好ましい方法である。他の例では、サムネイルは、シグネチャデータの一部または全部の高速フーリエ変換に基づくものとしてよい。次いで、ステップS6で使用される同じ2値化規則を縮小データセットに適用する。サムネイルデジタイズは、iを1からN/cまでの値を取るものとしてtk(i)として定義され、cは、圧縮係数である。
【0073】
ステップS8は、複数の検出器チャネルが存在する場合に適用可能なオプションのステップである(つまり、k>1の場合)。追加のコンポーネントは、複数の光検出器のうちの異なる光検出器から得られた強度データの間の計算された相互相関コンポーネントである。チャネルが2つの場合、可能な相互相関係数は1つ、チャネルが3つの場合、最大3つまで、チャネルが4つの場合、最大6つまでなどとなる。相互相関係数は、材料の種類のよい指標となることが判明しているため有用である場合がある。例えば、所与のタイプのパスポートなどの特定のタイプの文書、またはレーザープリンタ用紙では、相互相関係数は、常に、予測可能な範囲内に収まるように見える。正規化された相互相関は、ak(i)とal(i)との間で計算することができるが、ただし、k≠lであり、k,lは、光検出器チャネルの個数すべてにわたって変化する。正規化された相互相関関数は、
【0074】
【数1】
【0075】
として定義される。
【0076】
後で検証する際に使用するために格納することができる相互相関関数の他の態様は、相互相関関数のピークの幅、例えば、半値全幅(FWHM)である。検証処理において相互相関係数を使用することについて、以下で詳述する。
【0077】
ステップS9は、信号強度分布を示す単純な強度平均値を計算するもう1つのオプションのステップである。これは、ak(i)の二乗平均平方根(rms)値などの、異なる検出器に対する平均値のそれぞれの全平均またはそれぞれの検出器に対する平均としてよい。検出器が上述の読取り装置のような法線入射のいずれかの側で対として構成される場合、検出器のそれぞれの対に対する平均を使用することができる。強度値は、サンプルの全体的な反射率および粗さの単純な指標であるため、材料タイプに対するよい粗フィルタとなっていることが判明している。例えば、強度値として、平均値を取り除いた後の非正規化rms値、つまり、DCバックグラウンドを使用できる。rms値は、rms値が表面粗さに関係するという点で表面の反射率の指標となる。
【0078】
物品をスキャンすることで得られたシグネチャデータを、検証を目的としてシグネチャデータベース内に保持されているレコードと突き合わせて比較し、および/またはデータベースに書き込んで、シグネチャの新しいレコードを追加して既存のデータベースを拡張し、および/または符号化された形式で物品に書き込んで、データベースへのアクセスがあろうとなかろうと後から検証できるようにすることができる。
【0079】
新規データベースレコードは、ステップS6で得られたデジタルシグネチャ、さらには適宜、それぞれの光検出器チャネルに対しステップS7で得られたより小さなサムネイルバージョン、ステップ8で得られた相互相関係数、およびステップS9で得られた平均値を含む。あるいは、これらのサムネイルは、高速検索用に独自に最適化された別のデータベース上に格納することもでき、データの残り(サムネイルを含む)を主データベース上に格納することができる。
【0080】
図15は、スキャンから得られた物品のシグネチャがシグネチャデータベースと突き合わせてどのように検証できるかを示す流れ図である。
【0081】
単純な実装では、データベースを単に検索し、フルセットのシグネチャデータに基づいてマッチを見つけることができる。しかし、検証プロセスをスピードアップするために、本発明の例のプロセスでは、次に説明する計算で求めた平均値および相互相関係数に基づいてより小さなサムネイルおよび事前選別を使用する。このような高速検索プロセスを実現するために、検証プロセスは、2つの主要なステップに分けて実行され、第1のステップでは、今説明しているようなスキャンデータのフーリエ変換の振幅成分から導出されたサムネイルを使用し(適宜、計算された平均値と相互相関係数に基づいて事前スクリーニングを行い)、第2のステップでは、スキャンされたデジタルシグネチャと格納されている完全なデジタルシグネチャを互いに比較する。
【0082】
検証ステップV1は、検証プロセスの第1のステップであり、これは、上述のプロセスに従って物品をスキャンする、つまりスキャンステップS1からS8を実行する。このスキャンでは、既存の物品のシグネチャの1つまたは複数のレコードと突き合わせて妥当性を確認すべき物品に対するシグネチャを取得する。
【0083】
検証ステップV2では、サムネイル(スキャン信号のフーリエ変換の振幅成分から、またはスキャン信号からの実空間サムネイルとして導出された)を使用して候補マッチを探すが、これはスキャンステップS7を参照して上で説明されているように取得される。検証ステップV2では、サムネイルエントリのそれぞれを取り、それとtk(k+j)との間の一致するビットの個数を評価するが、ただし、jは、スキャンされた領域の配置の誤差を補正するように変化するビットオフセットである。jの値が決定され、次いで、一致するビットの最大数を与えるサムネイルエントリが決定される。これは、さらに処理するために使用される「ヒット」である。これに対するバリエーションは、完全デジタルシグネチャに基づく完全検査に対する複数の候補マッチを通す可能性を含めることである。サムネイル選択は、最大数、例えば、10または100の候補マッチまで通過させるなどの好適な基準に基づくものとしてよく、それぞれの候補マッチはマッチングビットの特定の閾値パーセンテージ、例えば、60%より大きいサムネイルとして定義される。最大数を超える候補マッチがある場合、最良の候補のみが渡される。候補マッチが見つからない場合、物品は破棄される(つまり、検証ステップV6にジャンプし、失敗結果を発行する)。
【0084】
本発明の例で使用されるこのサムネイルベースの検索法は、以下の理由から、全体として検索速度が改善される。サムネイルは、完全なシグネチャに比べて小さいので、完全なシグネチャを使用するよりも、サムネイルを使用した方が検索時間が短縮される。実空間サムネイルが使用される場合、完全なシグネチャを格納されているシグネチャと突き合わせてビットシフトし、マッチを判定するのを同じ方法で、サムネイルを格納されているサムネイルと突き合わせてビットシフトし、「ヒット」が生じたかどうかを判定する。サムネイル検索の結果は、推定マッチのショートリストであり、次いで、それぞれに対して、推定マッチを使用し完全なシグネチャを検査することができる。
【0085】
サムネイルがシグネチャのフーリエ変換またはその一部に基づく場合、検索時にサムネイルをビットシフトする必要がないので、さらなる利点が得られる。疑似ランダムビット列は、フーリエ変換されたときに、振幅スペクトルに情報の一部を載せ、位相スペクトルに残りを載せる。しかし、ビットシフトは、位相スペクトルにのみ影響し、振幅スペクトルには影響しない。したがって、振幅スペクトルは、ビットシフトを知らなくてもマッチングすることができる。位相スペクトルを破棄する際に一部の情報が失われるけれども、データベースと突き合わせておおよそのマッチを得るには十分である。これにより、データベース内でターゲットとの1つまたは複数の推定マッチを特定することができる。次いで、実空間サムネイルの例の場合と同様に、新規スキャンに対して従来の実空間法を使用し、これらの推定マッチのそれぞれを適宜比較することができる。
【0086】
検証ステップV3は、スキャンされたデジタルシグネチャと突き合わせてレコードに対する格納されている完全デジタルシグネチャを分析する前に実行されるオプションの事前選別検査である。この事前選別では、スキャンステップS9で得られたrms値が、ヒットのデータベースレコード内の対応する格納されている値と突き合わせて比較される。「ヒット」は、それぞれの平均値が定義済み範囲に収まらない場合に他の処理から除去される。次いで、物品が、非検証として破棄される(つまり、検証ステップV6にジャンプし、失敗結果を発行する)。
【0087】
検証ステップV4は、完全デジタル署名を分析する前に実行される他のオプションの事前選別検査である。この事前選別では、スキャンステップS8で得られた相互相関係数が、ヒットのデータベースレコード内の対応する格納されている値と突き合わせて比較される。「ヒット」は、それぞれの相互相関係数が定義済み範囲に収まらない場合に他の処理から除去される。次いで、物品が、非検証として破棄される(つまり、検証ステップV6にジャンプし、失敗結果を発行する)。
【0088】
検証ステップV4で実行することが可能な相互相関係数を使用する他のチェックでは、相互相関関数のピークの幅をチェックし、相互相関関数は、上記のスキャンステップS7のオリジナルスキャンからの格納されている値と再スキャンされた値
【0089】
【数2】
【0090】
とを比較することにより評価される。
【0091】
再スキャンされたピークの幅が、オリジナルスキャンの幅よりも著しく高い場合、これは、再スキャンされた物品が改ざんされているか、または他の何らかの形で不審であることを示す指標としてみなすことができる。例えば、このチェックで、スキャンされる表面における光検出器により予想される同じ強度変動を持つバーコードまたは他のパターンを印刷することによりシステムを欺こうとする詐欺師を打ち負かさなければならない。
【0092】
検証ステップV5は、「ヒット」として弁別された推定マッチが実際にマッチであるかどうかを判定する検査を実行する。本発明の例では、この検査は、自己較正であり、したがって、スキャンされた表面上の急激な遷移(反射光の段階状変化を引き起こす印刷パターンなど)によって引き起こされるシグネチャの喪失が回避される。これにより、処理が簡素化され、物品表面上の印刷または他のパターンによるシグネチャを構成すべきデータのうちのかなりのパーセンテージが喪失する可能性が回避される。
【0093】
ステップS4および図9から14を参照しつつ上で説明されているように、真贋判定/妥当性確認マッチ信頼度に対する表面パターン形成/印刷の影響を制限するアクションをシグネチャ生成段階で実行することができる。本発明の例では、物品表面の粗さ/テクスチャ応答によってではなく遷移効果によって設定されたシグネチャ内のデータビットのマッチ結果に対する影響を最小限に抑える追加のアプローチを取ることができる。これは、図9から14を参照しつつ上で説明されている遷移の上限を定めるアプローチが実行されるかどうかに関わらず実行されうる。
【0094】
したがって、ステップV5では、サムネイル検索を使用してヒットのショートリストが編集された後、またV4のオプションの事前スクリーニングの後に、多数のアクションが実行される。
【0095】
最初に、ショートリストシグネチャのそれぞれに対する記録シグネチャと最良の全体的なマッチ結果を有するシグネチャを選択する検査シグネチャとの間の完全なシグネチャ比較を実行する。これは、最良マッチシグネチャとして選択される。最良マッチシグネチャが実際にマッチ結果であるかどうか、または単に比較的高いスコアリングの非マッチであるかを確定するのを補助するために、シグネチャのビットのランダム性の尺度を使用して、最良マッチシグネチャに対する相互相関の結果に重みを付ける。
【0096】
シグネチャ内のビットのランダム性の尺度を確定するために、最良マッチシグネチャと、サムネイルによって識別されたショートリスト内の他のシグネチャに対する記録シグネチャとの相互相関を求める。最良マッチシグネチャに対するそれぞれのショートリストシグネチャのスライディング相互相関から、最良マッチシグネチャに対するこれらのショートリストシグネチャのそれぞれについて最良結果位置を見つけることができる。次いで、最良マッチシグネチャのそれぞれのビット値がそれぞれショートリストシグネチャのそれぞれの最良結果位置に出現する回数を測定する。
【0097】
この測定された値は、最良マッチシグネチャ内のそれぞれのビットのランダム性を表す。例えば、与えられたビット値がショートリストシグネチャのほぼ半分において同じである場合、ビットはおそらくランダムであるが、与えられたビット値がショートリストシグネチャのほぼ90%において同じである場合、ビットはおそらくランダムではない。この尺度を定量化するために、本発明の例では、ビットユーティリティ比(bit utility ratio)
【0098】
【数3】
【0099】
を定義し、使用する。
【0100】
これにより、ランダム性のよいレベルを示すビットについては、1の、または1に近いBit Utility Ratioが適用され、ランダム性の低いレベルを示すビットについては、0の、または0に近いBit Utility Ratioが適用される。上記の例を再び参照すると、与えられたビット値がショートリストシグネチャのほぼ半分において同じである場合(AverageBitBMR=0.5)、Bit Utility Ratio=1であるが、与えられたビット値がショートリストシグネチャのほぼ90%において同じである場合(AverageBitBMR=0.9)、Bit Utility Ratioは0.04である。
【0101】
次いで、最良マッチシグネチャのそれぞれのビットについて計算したBit Utility Ratioを使用して、検査シグネチャと最良マッチシグネチャとの間の比較について相互相関の結果に重みを付ける。したがって、従来実行されるような相互相関におけるそれぞれのビット比較に対する比較結果を単に総和する代わりに、それぞれのビットに対するBit Utility Ratioを使用してビット結果の総和がなされる前にそれぞれのビット結果に重みを付ける。そこで、相互相関の総和結果は、重み付けが適用されない場合に、f(i)は検査シグネチャのi番目の値を表し、g(i)は記録シグネチャのi番目の値を表すものとして
【0102】
【数4】
【0103】
として定義されるが、相互相関の総和結果は、Bit Utility Ratio (BUR)を重み付けとして使用する場合に、BUR(i)は記録シグネチャのi番目に対するビットithのBit Utility Ratioを表すものとして、
【0104】
【数5】
【0105】
として定義される。
【0106】
次いで、この補正されたBit Match Ratioを使用して、最良マッチ記録シグネチャが実際に検査シグネチャと同じ物品から取られたかどうかを評価することができる。図16は、図10との比較により、単一の物品の異なるスキャン同士の比較に対するピーク(つまり、マッチ結果)が約97%のビットマッチ比を中心とするが、今度は、異なる物品のスキャンに対し比較が実行される第2の最良マッチに対するピークは約55%のビットマッチ比を中心とすることを示している。したがって、非マッチとマッチとの区別は、かなり明確であり、また区別できる。
【0107】
当業者には明らかなように、本発明の例で実装された2つのプロセスはそれぞれ、別々に、物品表面上の印刷もしくはパターン形成により間違った結論に到達するマッチ結果を回避することに著しく寄与している。したがって、これらの技術のいずれか(または両方)の実装により、単一の真贋判定または検証システムをさまざまな物品タイプ上で作動させることができ、しかも、どの物品タイプが考えられているかを知る必要もなく、または書き込む前に記録シグネチャデータベースを事前再構成する必要もない。
【0108】
代替な実施例において、EP1,730,675Aにおいて説明したようなステップV5の実行方法が実施例の代わりに、使われることができる。
【0109】
検証ステップV6は、検証プロセスの結果を発行する。紙の上で実施した実験では、これは、呼応しているビットの75%がよい、または優れているマッチを表すが、呼応するビットの50%が非マッチを表すことが一般的に判明した。
【0110】
与えられた結果がマッチまたは非マッチを表すかどうかの判定を、閾値または閾値の集合に対して実行する。マッチと非マッチとの間で必要な区別のレベルは、特定の用途における偽陽性と偽陰性に対する感度レベルに応じて設定されうる。閾値は、絶対BMR値に関係し、および/またはショートリストに入っている記録シグネチャからの非マッチ結果のグループに対するピーク幅の尺度を含み、および/または最良の結果と2番目に最良の結果との間のBMRの隔たりの尺度を含むことができる。
【0111】
例えば、100万個のレコードを含み、それぞれのレコードが128ビットのサムネイル(フーリエ変換振幅スペクトルから、または実空間サムネイルとして導出される)を含む、データベースを検索できる時間は、標準的な2004年仕様のPCコンピュータ上で1.7秒であることが実験で判明している。1000万個のエントリを検索するには、17秒を要する。最新のコンピュータおよびハイエンドのサーバーコンピュータであれば、これの10倍またはそれ以上の速度を達成することが予想されうる。
【0112】
こうして、物品から生成されるシグネチャが知られている物品のデータベース内にすでに格納されているかどうかを検証する方法について説明された。
【0113】
多くの変更形態が可能であることは理解されるであろう。例えば、相互相関係数を事前選別コンポーネントとして処理する代わりに、これらは、主シグネチャの一部として2値化された強度データといっしょに処理することが可能である。例えば、相互相関係数を2値化し、2値化された強度データに加えることが可能である。相互相関係数は、さらに、単独で2値化され、ヒットを見つけるために2値化された強度データのサムネイルについて上述と同じ方法で検索することが可能なビット列などを生成するために使用できる。
【0114】
そこで、マッチの信頼度結果を得るために検査シグネチャと記録シグネチャとを比較するための多数のオプションについて説明された。
【0115】
図17は、検証を目的として文書をスキャンする全体的プロセスおよびユーザーに提示される結果を示す流れ図である。最初に、文書を図8のスキャンステップに従ってスキャンする。次いで、文書の真贋を図15の検証ステップを使用して検証する。データベース内にマッチするレコードがない場合、「非マッチ」結果をユーザーに対して表示することができる。マッチがある場合、これは、好適なユーザーインターフェイスを使用してユーザーに対して表示されうる。ユーザーインターフェイスは、異なる結果についてオンオフするか、または一方の色から他方の色に変わるランプまたはLEDなどの単純な「yes/no」型インジケータシステムとすることができる。ユーザーインターフェイスは、クレジットカードの従来の検証に使用されうるような、販売時点型検証レポートインターフェイスの形態を取ることもできる。ユーザーインターフェイスは、結果内の確度およびオリジナルの物品またはその物品の所有者を記述しているデータなどの、結果のさまざまな詳細を与える詳細インターフェイスとすることも可能である。このようなインターフェイスは、システムアドミニストレータまたは実装者がシステムの動作状態に関するフィードバックを返すために使用することが可能である。このようなインターフェイスは、従来のコンピュータ端末で使用するソフトウェアパッケージの一部として備えることも可能である。
【0116】
したがって、データベースのマッチが見つかったときに、ユーザーが自分の常識を検証の追加の情報層に対して適用することを可能にすることもできる直観的で、アクセス可能な形式でユーザーに関連する情報を提示することができることは理解されるであろう。例えば、物品が文書である場合、ユーザーインターフェイス上に表示される文書の画像は、検証者に提示される文書と似ているべきであり、文書の作成元に関係する信頼度レベルおよび書誌データなどの他のファクタも興味がある。検証者は、自分の経験を適用して、それらのさまざまな情報断片に自己矛盾がないかどうかに関する価値判断を下すことができる。
【0117】
その一方で、スキャン検証オペレーションの出力を、人間のオペレータではなく何らかの形態の自動制御システムに供給することができる。そこで、自動制御システムは、検証(または非検証)シグネチャの取り出し元の物品に関係するオペレーションにおいて使用するために利用可能な出力結果を有する。
【0118】
レーザー関連システムに関して発明者の以前の研究から発見されたように、物品の表面上への光の集光は、上品質のデータを得られるという観点から重要である。上品質のデータから信頼できると共に再生可能なシグネチャが生成される。
【0119】
図18は、結果として生じるシグネチャに関する焦点精度の効果を例示する図である。図18から分かるように、開口幅(集光された光線形状を定義する有効口径(effective aperture)、図4に示されている物理的な開口または集束レンズによってつくられる有効口径)が大きくなるにつれ、自己相関幅(autocorrelation width)(すなわち、シグネチャから結果として生じるピークの半値全幅がそれ自体に対して相互相関していること)が大きくなる。これは、光検出器から受け取った信号がより少ない情報を含むことを示す。情報は、特徴を決定するようになるとき、シグネチャにおける有効なビットの数が低減されることを意味する。また、開口幅が増加するにつれて、それが変化する間に、光検出器によって受け取られる信号における微小な強度変化を示すdI/I測定値(ある意味では、これは、受信信号の「強さ」である)は減少する。これは、ターゲットの表層構造により生成される受け取った信号が弱っていることを意味する。
【0120】
異なる照明技術の実行が、図19A〜図19Dに図示されている。各図は、同じ物品の同じ領域の2つの連続的なスキャンのそれぞれに対して表示されている。物品は、粉ガラス(ground glass)の5mmの長さスキャン領域であった。粉ガラスは、RMS表面粗さの1.8μm高さを有する。2つのスキャンがほぼ同一のデータを返す所で、各図における2つのプロット線間の差は、殆ど目立たない。
【0121】
図19Aは、照明が図2に関して説明したLEDアレイのような構造化LED光源からである場合の結果を示す。
【0122】
図19Bは、比較のため、照明が円柱状レンズによる細長い焦点に集光された平行化レーザー光源からである場合の結果を示す。
【0123】
図19Cは、光源が例えばフィラメント灯の熱光源である図3に関して説明したような構造化された開口配置構成からの結果を示す。
【0124】
図19Dは、光源がLEDである図3に関して説明したような構造化された開口配置構成から得られた結果を示す。
【0125】
すべてのケースで分かるように、2つのスキャンの間の相関関係は、非常に良好であり、構造化光源及び非構造化光源の両方において、再現性の高水準が達成可能である。
【0126】
図19が異なる光源タイプのためのシグネチャ生成の再現性を例示する図である。重要なポイントは、物品はその能力に基づいて確認されるかまたは認証され、複数の異なる場合に分析されるときに、又は問い合わせられるときに実質的に同じシグネチャが生成する。他の重要な考慮は、信号の強さである。信号の強さ、すなわち反射または読取り体積からの屈折の強度から、シグネチャが発生される。これは、図20に図示されている。図20において、構造化LED光源又はレーザー光源から反射の強度が、比較されている。図20における2本のプロット線は、ほぼ紙基材の同じ一部の30mmのスキャンのためであり、そのため、ピークの位置との相対的なピークのサイズとの僅かな差は、2つの光源の性能を比較する際に重要でない。しかし、図23から読み込まれ得ることは、LED光源のトレースのための微細なピークがレーザー光源トレースのそれらより相対的に小さいという点で構造化LED光源からの反射の相対的な強度がレーザー光源からの反射の相対的な強度より僅かに小さい。このように、レーザー光源がLED光源より高い振幅を有する微細な表層構造を読取ることが分かる。
【0127】
図21は、生成されたシグネチャの抵抗と同じ対象の異なるスキャンのためターゲット表面に対するスキャナの位置決めのオフセットとの比較を示す。図21に示されているように、同じ物品の異なるスキャン間の相互相関ビットマッチ比率の減少は、レーザー光源により僅かに速い構造化された光源に対するスキャンの間に横方向の平行(transverse translational)のミス位置決めと共に落ちる。
【0128】
レーザー光源が用いられた場合の性能と、非コヒーレント光源を用いた場合の性能との比較が図22に示されている。このグラフは、様々な基板に対してレーザー光源に基づくスキャナーと、構造化非コヒーレント光源に基づくスキャナーとを用いた同じ基板に対する異なるスキャンを比較したときに得られたビットマッチ比(Bit Match Ratio)を示す。結果は、(例えば、エイブリー・デニスン社により生産されたような)紙印刷ラベルのターゲット基板と測定表層粗さの表面120Grit(test target Thor Labs DG100X100−120 ground glass diffuser)及び測定表層粗さの表面220Grit(test target Thor Labs DX100X100−220 ground glass diffuser)とに対する周知マッチの結果の強さを示す。
【0129】
このグラフは、より大きい表層テクスチャ・サイズ(紙、粒径〉約100μm)に対して非コヒーレント光源の性能がレーザー光源の性能と同等であるが、非コヒーレント光源の性能がレーザー光源の性能はより少ない表層テクスチャ・サイズに対しては低下され得ることを示す。
【0130】
したがって、ターゲット基板から再生可能なシグネチャをつくるために、ターゲット基板をスキャンするための非コヒーレント光源を使用することが様々な状況に対する現実的なオプションであることは明らかである。このタイプの非レーザーシステムの実施における3つの問題がある。これらは、必要な焦点を得る能力と、その焦点での反射における必要な強度を得る能力と、特定の条件で非レーザー光にと共にレーザー散乱の光学特性が機能するかということとである。上記から分かるように、焦点は得られることができ、充分な強度は得られることが可能である。そして、レーザー散乱効果は、システムが機能し、有用で再生可能なデータを提供するのに十分によく発生する。
【0131】
そこで、レーザー光源を用いずに、物品をスキャンしてそこからシグネチャを形成する方法およびそのスキャン結果を物品の以前の記録シグネチャと比較してスキャンされた物品が記録シグネチャの取り出し元である物品と同じであるかどうかを判定する方法について説明されている。これらの方法は、物品が非常に高い精度で記録スキャンがなされた物品とマッチするかどうかの判定を行うものとしてよい。
【0132】
そこで、一観点から、紙、段ボール、プラスチック、金属、または他の物品上で集光非コヒーレント光線をスキャンし、その散乱を測定することによって得られるデータ点の集合を2値化することによってデジタルシグネチャが得られるシステムの要約が説明された。サムネイルデジタルシグネチャも、データの平均または圧縮処理によって実空間において、またはデータ点の集合のフーリエ変換の振幅スペクトルを2値化することによって決定される。こうして、デジタルシグネチャおよびそのサムネイルのデータベースを構築することができる。物品の真贋は、後から、物品を再スキャンしてそのデジタルシグネチャおよびサムネイルを判定し、次いで、データベース内のマッチを検索することによって検証することができる。サムネイルに基づいて検索を実行し、検索速度を改善する。フーリエ変換ベースのサムネイルを使用することで、速度を改善することができるが、それは、疑似ランダムビット列において、ビットシフトは、極座標で表されるフーリエ変換の位相スペクトルにのみ影響を及ぼし、振幅スペクトルには影響を及ぼさないからである。したがって、オリジナルのスキャンと再スキャンとの間のレジストリ誤差によって引き起こされる未知のビットシフトを知ることなく、サムネイルに格納される振幅スペクトルのマッチングを行うことができる。
【0133】
いくつかの例では、スキャンされた物品からシグネチャを抽出する方法は、例えば、引き伸ばしまたは縮みにより物品に変形が生じたとしても物品を確実に認識するように最適化することができる。物品のこのような引き伸ばしまたは縮みは、例えば、水害により、紙またはボール紙を使用した物品に生じうる。
【0134】
さらに、物品は、スキャナ内のセンサに対する物品の相対速度が非線形である場合に、スキャナからは、引き伸ばされたり、または縮んだりするように見えることがある。これは、例えば、物品が、コンベヤシステムに載って移動している場合、または物品が、物品を保持している人の手でスキャナに通される場合に発生しうる。このようなことがあり得そうなシナリオの一例として、人が、例えば、スワイプ式スキャナを使用して銀行カードをスキャンする場合が挙げられる。
【0135】
いくつかの例では、スキャナがスキャナに対しまたはスキャナ内で静止状態に保たれている物品に相対的にスキャナユニット内で移動するスキャンヘッドに基づく場合、スキャンヘッドの非線形な移動に対処するためスキャナ内で線形化誘導を行うことができる。物品が、人の手で動かされる場合、これらの非線形性は、大きく悪化しうる。
【0136】
これらの非線形効果により引き起こされうる認識問題を解消するために、物品のスキャンの分析段階を調節することが可能である。そこで、修正された検証手順について、図23aを参照しつつ説明することにする。この例で実装されるプロセスでは、非線形性に対処するためにデータのブロック毎分析を使用する。
【0137】
図23aに従って実行されるプロセスは、時間領域フィルター処理するステップ、代替的または追加の線形化を行うステップ、遷移の上限を定めるステップ、空間領域フィルター処理を行うステップ、データを平滑化し微分するステップ、および図8を参照しつつ説明されている署名およびサムネイルを取得するためにデジタイズするステップの一部または全部を含むことができるが、図23aでは、図の内容がわかりにくくならないようにするため、示されていない。
【0138】
図23aに示されているように、ブロック毎分析を使用する検証スキャンのスキャンプロセスは、物品のスキャンを実行して物品の固有の特性を記述するデータを取得することによりステップS21から始まる。このスキャンされたデータは、次いで、ステップS22で、連続する複数のブロックに分割される(デジタイズおよび平滑化/微分などの前または後に実行できる)。一実施例では、1600mm2(例えば、40mm×40mm)のスキャン面積は、8つの等しい長さのブロックに分割される。したがって、それぞれのブロックは、スキャンされた物品のスキャンされた領域の部分セクションとなる。
【0139】
ブロックのそれぞれについて、ステップS23で物品が比較されることが意図されている格納されたそれぞれのシグネチャに対し等価なブロックと突き合わせて相互相関が実行される。これは、ブロック毎に1つのサムネイルを使うサムネイルアプローチを使用して実行できる。次いで、これらの相互相関の計算結果を分析して、相互相関ピークの配置を弁別する。次いで、物品のオリジナルのスキャンと後からのスキャンとの間に完全に線形な関係があった場合に、ステップS24で相互相関ピークの配置がピークの予想配置と比較される。
【0140】
このブロックマッチング技術は、比較的計算量の多いプロセスであるため、いくつかの例では、その使用は、ブロック毎の分析がサムネイル検索によって弁別される潜在的シグネチャマッチのショートリストにのみ適用されるようにサムネイル検索との併用に制限されうる。
【0141】
この関係は、図24A、24B、および24Cに示すようにグラフで表すことができる。図24Aの例では、相互相関ピークは、ちょうど予想された位置にあり、物品に相対的なスキャンヘッドの移動は、完全に線形であり、物品に伸びまたは縮みは生じていない。したがって、予想されるピークに対する実際のピーク位置のプロットを描くと、原点を通り、勾配が1の直線が得られる。
【0142】
図24Bの例では、相互相関ピーク同士は、予想以上に近い位置にあり、最良適合の直線の勾配は1未満となる。そのため、物品は、初期スキャンの後の物理的特性に相対的に縮んでしまっている。また、最良適合直線は、プロットの原点を通らない。そこで、物品は、記録スキャンに対するその位置と比較してスキャンヘッドに相対的にシフトされる。
【0143】
図24Cの実施例では、相互相関ピークは、直線をなさない。この実施例では、これらのピークは、y2関数を表す曲線に近似的に当てはめられる。そのため、スキャンヘッドに相対的な物品の移動は、スキャン時に遅くなってしまっている。また、最良適合曲線は、原点を横切らないので、物品は、記録スキャンについてその位置に相対的にシフトされる。
【0144】
さまざまな関数を相互相関ピークの点のプロットにテストフィットして、最良適合関数を見つけることができる。したがって、伸び、縮み、ミスアライメント、加速、減速、およびそれらの組み合わせを記述する曲線を使用できる。好適な関数の例として、直線関数、指数関数、三角関数、χ2関数、およびχ3関数が挙げられる。
【0145】
ステップS25で最良適合関数が弁別された後、ステップS26においてそれぞれの相互相関ピークが予想位置からどれだけシフトされるかを表す一組の変化パラメータを決定することができる。次いで、スキャンから得られるデータに対する縮み、伸び、ミスアライメント、加速、または減速の影響を実質的に逆転するために、ステップS27において、これらの補正パラメータをステップS21で実行したスキャンから得られるデータに適用することができる。以下で理解されるように、ステップS25で求められた最良適合関数のスキャンデータへの当てはめ精度が高いほど、補正効果は高い。
【0146】
次いで、補正されたスキャンデータは、ステップS22と同様にステップS28で連続するブロックに分割される。次いで、これらのブロックと、ステップS29で格納されているシグネチャから得られるデータのそれぞれのブロックとの相互相関を求めて、相互相関係数を得る。このときに、ステップS29で、相互相関ピークの大きさを分析し、一意性係数を決定する。したがって、スキャンされた物品は、格納されているシグネチャが作成されたときにスキャンされた物品と同じであるかどうかが判定できる。
【0147】
したがって、スキャンされた物品の物理的変形、および/またはスキャナに相対的な物品の移動における非線形性を補正する方法の一実施例について説明された。この方法を使用することで、スキャンされた物品は、物品の前のスキャンから得られたその物品に対する格納されているシグネチャと突き合わせてチェックされ、これにより、同じ物品が後からのスキャンに存在しているかどうかを高い確度レベルで判定することができる。これにより、歪みやすい材料で作られた物品を確実に認識することができる。また、物品に相対的なスキャナの移動が非線形になりうるスキャナを使用することができ、これにより、移動制御要素を使用することなく安価なスキャナを使用することができる。
【0148】
スキャンデータのブロック毎の分析を実行するための代替的方法が図23bに提示されている。
【0149】
この方法は、ステップS21から始まり、図23aのステップS21を参照しつつ上で説明されているようにターゲット表面のスキャンを実行する。データが取り込まれた後、ステップS31でこのスキャンデータを所定の数のビットにキャストする。これは、スキャンデータのビットの数をキャスト長とマッチするように効果的に減らす段階からなる。本発明の例では、キャストデータを構成するためにスキャンデータの均等な間隔で並ぶビットを取ることによってスキャンデータをキャスト長に適用する。
【0150】
次に、ステップS33で、キャストデータの隣接するビット間の相関が十分に高いレベルであることを確認するチェックを実行する。実際、隣接するビットの間に約50%の相関があれば十分であることがわかっている。ビットが閾値の条件を満たしていないとわかった場合、スキャンデータをキャストするフィルターを調節し、キャストデータ内でビットの異なる組み合わせを構成する。
【0151】
キャストデータの隣接するビットの間の相関が十分に高いと判定された後、ステップS35で、キャストデータを格納されている記録シグネチャと比較する。これは、記録シグネチャのそれぞれの所定のブロックを取り、それをキャストデータと比較することによって実行される。本発明の例では、キャストデータと記録シグネチャに対する同等の縮小データセットとの間の比較を行う。記録シグネチャのそれぞれのブロックは、キャストデータのすべてのビット位置オフセットと突き合わせて検査され、そのブロックに対する最良マッチの位置が、最高の相互相関値を返すビットオフセット位置となる。
【0152】
記録シグネチャのすべてのブロックがキャストデータと比較された後、ブロックのそれぞれに対する最高の相互相関値としてその記録シグネチャについてマッチ結果(ビットマッチ比)を出力することができる。さらなる候補記録シグネチャを、必要ならばキャストデータと比較することができる(いくつかの例では検査が1:1検査であるか、1:多検査であるかに応じて)。
【0153】
比較ステップが完了した後、ステップS37で、オプションのマッチング規則を適用することができる。これらは、与えられた記録シグネチャに対するビットマッチ比を出力するときに記録シグネチャのさまざまなブロックを強制的に正しい順序にする段階を含むものとしてよい。例えば、記録シグネチャが5つのブロック(ブロック1、ブロック2、ブロック3、ブロック4、およびブロック5)に分割されるが、これらのブロックに対する最良の相互相関値が、キャストデータに対して検査したときに、異なる順序でブロックを返した場合(例えば、ブロック2、ブロック3、ブロック4、ブロック1、ブロック5)、この結果は棄却され、ブロックを正しい順序に保つ最良の相互相関結果を使用して新規の合計値を計算することが可能である。このステップは、実行される実験において、このタイプの規則が最終結果にもしあったとしてもほとんど相違を生じないことがわかっているためオプションである。これは、短いブロックの長さにわたって表面弁別特性が適切に作用し、間違った順序のマッチが出現して偽陽性が生じる可能性が統計的に極端に低いことによるものと信じられている。
【0154】
最後に、ステップS39で、ビットマッチ比を使用することにより、ステップS35で判定された相互相関ピークの位置に基づきスキャンデータについて記録シグネチャのブロックをシフトすることを含めて、スキャンデータの全体を記録シグネチャの全体と比較することによって一意性が判定されうる。このときに、ステップS39で、相互相関ピークの大きさを分析し、一意性係数を決定する。したがって、スキャンされた物品は、格納されている記録シグネチャが作成されたときにスキャンされた物品と同じであるかどうかが判定できる。
【0155】
この方法で使用されるブロックサイズは、効率的なマッチングおよびマッチングの高信頼性をもたらすように予め決定されうる。スキャンデータセットと記録シグネチャとの間の相互相関を実行するときに、マッチ結果が約0.9のビットマッチ比を有することが予想される。1.0のマッチ比は、スキャンによって測定される表面の特性のバイオメトリックタイプの性質により期待されない。非マッチが約0.5のビットマッチ比を有することも予想される。完全なシグネチャより少ないビットを含むときにブロックの性質は、非マッチ結果のありえそうな値をシフトする傾向を有し、そのため、偽陽性を見つける確率が高まる。例えば、実験によって、32ビットのブロック長により非マッチが約0.75に移動することがわかっているが、これは多くの用途において高すぎ、約0.9で陽性のマッチに近すぎる。64ビットのブロック長を使用すると、非マッチ結果は約0.68まで下がり、ここでもまた、用途によっては高すぎる場合がある。ブロックサイズを96ビットにさらに増やすと、非マッチ結果は約0.6まで下がり、大半の用途では、真陽性結果と偽陽性結果との間に十分以上の隔たりをもたらす。上記の説明から明らかなように、マッチのピークと非マッチのピークとの間の隔たりがブロック長の関数となっているので、ブロック長を増やすと非マッチ結果とマッチ結果との間の隔たりが増す。したがって、1ブロック当たりのビット数を増やすことにより引き起こされる処理の複雑さが増すことと引き換えに、ブロック長をピークの隔たりの増大(識別精度の高まり)に関して増やすことができることは明らかである。その一方で、真陽性結果と偽陽性結果との間の隔たりの小ささが許容可能であれば、ブロック長は、処理の複雑度を下げるために短くすることもできる。
【0156】
光検出器によって集められたデータの個別の部分集合に対する一意性の尺度を構成し、データを組み合わせるのではなくそれらの個別の一意性の値を組み合わせ、次いで全体的な一意性を計算することも可能である。例えば、いくつかの例では、データは処理のためブロックの集合に分けられ、それぞれのブロックはそのために計算されたBMRを有することができる。これは、一意性の尺度がブロック毎に構成されるようにさらに1ステップ進めることができる。同様に、個別の光検出器からのデータを分析して、それに対する一意性を生み出すことができる。
【0157】
このようなアプローチを取ることによって、全体的な一意性に関する追加の情報は明白なものとなりうる。例えば、データが10個のブロックに分割され、それらのブロックのうちの3つのブロックが非常に強い一意性をもたらし、残り7個のブロックがそれより弱いか、または存在しない一意性を返す場合、これは、10個のブロックすべてが控えめな一意性を持つかのように同じ全体的な一意性をもたらす可能性がある。したがって、物品の改ざん、物品の損傷、センサの不具合、および多数の他の状態を検出することができる。
【0158】
したがって、このようなアプローチは、個別のブロックおよび/または光検出器の一意性を組み合わせて全体的な一意性を構成することを伴う。これは、値を組み合わせる直截的な方法であるものとしてよいか、またはいくつかの状況では、重み付けを適用して、いくつかの値の寄与を他の値の寄与に対して勝るように強調することができる。対数目盛で表される一意性を組み合わせるために、個別の一意性を総和し(例えば、3つのブロックのうちそれぞれが1020の一意性を有し、全体的な一意性は1060となる)、対数目盛が使用されない場合には値を増やす。
【0159】
その物品の固有の特性に基づいて生成されたシグネチャのブロック毎分析を使用して検出することができる物品の他の特性は、その物品に局在する損傷の特性である。例えば、そのような技術を使用して、初期記録スキャンの後に行われる物品に対する修正を検出することができる。
【0160】
例えば、パスポート、IDカード、および運転免許証などの文書の多くは、携帯者の写真を含む。このような物品の真贋判定スキャンが写真の一部を含む場合、その写真に加えられた変更が、検出されることになる。ここで署名を10個のブロックに分割する任意の例を取りあげると、それらのブロックのうち3つは、文書上の写真を覆い、他の7つは、背景資料などの文書の他の部分を覆いうる。写真が置き換えられた場合、文書のその後の再スキャンでは、修正が行われていない7つのブロックに対する十分な一致が得られると予想することができるが、置き換えられた写真では、一致度は非常に悪いものとなる。それら3つのブロックが写真に対応することを知ることにより、3つすべてが非常に悪い一致度をもたらすという事実を利用し、シグネチャ全体に対する平均スコアに関係なく、文書の検証を自動的に失敗させることができる。
【0161】
また、多くの文書は、1人またはそれ以上の人々の書かれた指示、例えば、パスポート、運転免許証、またはIDカードに記載されている人の名前、または銀行口座保有者の名前を含む。多くの文書は、さらに、携帯者または証明者のシグネチャが記載される場所をも含む。検証のためそこから得られるシグネチャのブロック毎分析を使用することで、文書上に印刷または書かれた名前または他の重要な単語もしくは番号を改ざんする修正を検出することができる。改ざんされた印刷または手書きの位置に対応するブロックは、修正が行われていないブロックに比べて品質のかなり低い一致をもたらすと予想できる。そこで、修正された名前または書かれたシグネチャが検出され、文書の全体的一致度が合格結果を得られるほど十分に高い場合でも、文書は検証試験に失敗する可能性がある。
【0162】
スキャン領域に対し選択された領域および要素は、詐欺師が改ざんを試みる可能性が最も高い文書の要素を含む、多数の要因に依存しうる。例えば、写真を含む文書の場合、改ざんの最も可能性の高いターゲットは、通常、これが視覚的に携帯者を識別するような写真である。したがって、そのような文書に対するスキャン領域は、写真の一部を含むように選択されると都合がよい。不正修正を受ける可能性のある他の要素は、携帯者のシグネチャであるが、それは、人が自分以外の人の名前を名のるのは容易であるが、他の人のシグネチャを複製することは比較的難しいからである。したがって、シグネチャ入り文書、特に写真を含まないものの場合、スキャン領域は文書上のシグネチャの一部を含んでいると都合がよい。
【0163】
したがって、一般的な場合において、物品の真贋検査は、署名全体に対し検証シグネチャと記録シグネチャとの十分に品質の高い一致、シグネチャの少なくとも選択されたブロックにわたる十分に高い一致についての検査を含むことができることがわかる。したがって、物品の真贋を評価することに対し重要な領域は、肯定的な真贋判定結果を得るのに重要であるものとして選択することができる。
【0164】
いくつかの実施例において、クリティカルブロックとして選択されたブロック以外のブロックは、悪い一致度の結果を与えることが許される可能性がある。したがって、文書は、クリティカルブロックがよい一致度を有し、シグネチャが全体としてよい一致度を示す限り、破れたり、他の何らかの形で一部が破損しているにも関わらず本物であると認めることができる。
【0165】
そこで、物品の局所的損傷を識別し、その所定の領域内に局所的な損傷または改ざんがある本物でない物品を除去するためのシステム、方法、および装置の多くの実施例が説明された。他の領域内の損傷または改ざんについては、無視することができ、これにより、文書を本物として認識することができる。
【0166】
スキャナ装置によっては、スキャンされた領域の始まりの位置と終わりの位置を決定することが困難な場合もある。上述の例のうち、これは、スキャナが物品のスキャン領域以上の領域を「見る」ことができる処理ライン型システムにおいて最も問題となる可能性がある。この問題を解決する一アプローチでは、スキャン領域を物品の縁から始まるものとして定義する。スキャンヘッドで受け取ったデータは、物品が以前に空き領域と呼ばれていたところに通されるときに明確な段階的変化を受けるので、スキャンヘッドで取り出されたデータは、スキャンが始まる場所を判定するために使用できる。
【0167】
この例では、スキャンヘッドは、物品をスキャナに置く前に稼働状態にある。したがって、最初に、スキャンヘッドは、スキャンヘッドの前にある未占有空間に対応するデータを受け取る。物品がスキャンヘッドの前に通されると、スキャンヘッドにより受け取られたデータは、即座に、変化し、物品を記述するデータとなる。そのため、データを監視して物品の先頭を判定し、それよりも前にあるすべてのデータを無視することができる。物品前縁に相対的なスキャン領域の位置および長さは、さまざまな方法で決定することができる。最も単純なのは、スキャン領域を物品の全長とすることであり、これにより、スキャンヘッドで再び空き領域に対応するデータをピックアップすることで終わりを検出できる。他の方法では、前縁から所定のスキャン読取り回数だけ記録されたデータの開始および/停止を行う。物品は、常に、ほぼ同じ速度でスキャンヘッドを通過すると仮定すると、この結果、一貫したスキャン領域が得られる。他の代替的方法では、物品上の実際のマークを使用してスキャン領域の始まりおよび終わりを決めるが、これの方法は、取り込まれたどのデータがスキャン領域に対応しており、どのデータを無視できるかを決定するために、データ処理に関してさらに多くの作業を必要とする可能性がある。
【0168】
いくつかの例では、処理ラインの駆動モーターに、ロータリーエンコーダを装着し、物品の速度を定めることができる。あるいは、何らかの形態のリニアエンコーダをラインの移動表面に関して使用することができる。これを使用して、物品の検出された前縁に関してスキャンの開始および停止位置を決定することができる。これを使用すると、図8を参照しつつ上で説明されているように、データの線形化に関する速度情報が得られる。速度は、エンコーダから定期的に決定されることができ、これにより、速度を、1日に1回、1時間に1回、半時間に1回などの間隔でチェックする。
【0169】
いくつかの例では、処理ラインの速度は、センサから出力されたデータを分析することで判定されうる。物品のサイズをあらかじめ知っておき、物品がスキャナを通る際の時間を測定することによって、平均速度を決定することができる。この計算した速度を使用し、図8を参照しつつ上で説明されているように、前縁に関してスキャン領域を特定し、データを線形化することができる。
【0170】
このタイプの状況に対処するための他の方法は、物品上のマーカーもしくはテクスチャの特徴を使用してスキャン領域の開始および/または終了を示す方法である。これは、例えば、上述のパターンマッチング技術を使用して弁別することが可能である。
【0171】
そこで、アイテムをスキャンし物品の固有の特性に基づいてデータを集める技術、必要ならばスキャンプロセスにおける物品の損傷または非線形性を補正する技術、および物品の前のスキャンに基づいて物品を格納されているシグネチャと比較して両方のスキャンに対し同じ物品が存在しているかどうかを判定する技術が多数説明された。
【0172】
シグネチャ生成に対するさらなるオプションの配置構成について説明する。この例の技術は、光検出器16からの反射信号の抽出に対し微分アプローチを使用するものである(図1に例示されているように)。このアプローチでは、光検出器は、対として取り扱われる。したがって、2つよりも多い光検出器が使用される場合、微分アプローチのためにいくつかを対として含め、いくつかを個別に、または総和をとる形で考慮することができる。この例の残り部分は、2つの光検出器16aおよび16bが使用される状況に関するものである。
【0173】
本発明の例では、それぞれの光検出器16からの出力が別個のADC 31に供給される。次いで、これら2つのADCの出力を微分し(例えば、この場合、第2の光検出器からの2値化された信号を第1の光検出器からの2値化された信号から差し引く)、シグネチャ生成に使用されるデータセットを構成する。
【0174】
この技術は、微分がその後信号強度を倍増するに至るまでの効果を有するので、2つの光検出器からの出力が実質的に自己相関している状況に特に適用可能である。高レベルの自己相関が生じる状況の例として、高レベルのハーフトーン印刷がなされている表面が挙げられる。
【0175】
こうして、物品からバイオメトリックタイプのシグネチャを取得して使用するための様々なシステムが説明された。代替的スキャナ配置構成、およびそのようなシステムのさまざまな用途および使用については、上記のさまざまな特許出願に記載されている。本明細書で開示されているマッチ結果検査アプローチを物理的スキャナ配置構成および/または他の特許出願において開示されているそのような技術の用途および使用とともに使用することは、発明者が企図している。
【符号の説明】
【0176】
1 光学式読取り装置
10 読取り開口
12 筐体
14 レーザー光源、レーザー発生器
15 コヒーレントレーザー光線
16 検出器配置構成
16a、16b 光検出器要素
18 集束配置構成
20 サブアセンブリ
22 モーター
31 アナログ/デジタルコンバータ(ADC)
36 制御およびシグネチャ生成ユニット
50 スキャン領域
51、52、53、54、55、56 領域
【技術分野】
【0001】
本発明は、認証(authentication)に関し、特に、排他的ではないが、非コヒーレント放射線源を用いる認証及び確認に使用される信頼可能で且つ再生可能なシグネチャ生成を達成することに関する。
【背景技術】
【0002】
物品の真贋判定を行う分野では、物品用の弁別器(identifier)に頼るのは周知のことである。
物理的特性に基づく弁別器を使用することができ、これらは、埋め込まれた反射粒子(国際公開第02/50790A1号、米国特許第6584214号)または物品の非改質表面(国際公開第2005/088533号)を含むものとしてよい。物性に基づく弁別器(identifier)が、使うことができる。従来、この分野の発明者の発明は、コヒーレント光線で表面を照らすことによって、物品の変更されていない表面から弁別器を決定することに関連してきた。その他(国際公開第2006/021083号)としては、変更された物品及び変更されていない物品を有するターゲットへの刺激を示すためにLEDソースの使用が提案された。しかしながら、国際公開第2006/021083号において、提案された配置構成は、高い認証信頼性を有する有用な装置の作製に用いることは極めて困難である。
【0003】
弁別器に基づく認証結果を提供するためには、認証される物品からの読取りを格納された読取り結果と比較する必要がある。この比較のために、マッチ発見アルゴリズム(match finding algorithm)が使用される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】国際公開第02/50790A1号
【特許文献2】米国特許第6,584,214号
【特許文献3】国際公開第2005/088533号
【特許文献4】国際公開第2006/021083号
【特許文献5】英国特許第0405641.2号
【特許文献6】英国特許第2411954号
【特許文献7】英国特許第0418138.4号
【特許文献8】英国特許第2417707号
【特許文献9】米国特許第60/601,464号
【特許文献10】米国特許第60/601,463号
【特許文献11】米国特許第60/610,075号
【特許文献12】英国特許第0418178.0号
【特許文献13】英国特許第2417074号
【特許文献14】米国特許第60/601,219号
【特許文献15】英国特許第0418173.1号
【特許文献16】英国特許第2417592号
【特許文献17】米国特許第60/601,500号
【特許文献18】英国特許第0509635.9号
【特許文献19】英国特許第2426100号
【特許文献20】米国特許第60/679,892号
【特許文献21】英国特許第0515464.6号
【特許文献22】英国特許第2428846号
【特許文献23】米国特許第60/702,746号
【特許文献24】英国特許第0515461.2号
【特許文献25】英国特許第2429096号
【特許文献26】米国特許第60/702,946号
【特許文献27】英国特許第0515465.3号
【特許文献28】英国特許第2429092号
【特許文献29】米国特許第60/702,897号
【特許文献30】英国特許第0515463.8号
【特許文献31】英国特許第2428948号
【特許文献32】米国特許第60/702,742号
【特許文献33】英国特許第0515460.4号
【特許文献34】英国特許第2429095号
【特許文献35】米国特許第60/702,732号
【特許文献36】英国特許第0515462.0号
【特許文献37】英国特許第2429097号
【特許文献38】米国特許第60/704,354号
【特許文献39】英国特許第0518342.1号
【特許文献40】英国特許第2429950号
【特許文献41】米国特許第60/715,044号
【特許文献42】英国特許第0522037.1号
【特許文献43】英国特許第2431759号
【特許文献44】米国特許第60/731,531号
【特許文献45】英国特許第0526420.5号
【特許文献46】英国特許第2433632号
【特許文献47】米国特許第60/753,685号
【特許文献48】英国特許第0526662.2号
【特許文献49】米国特許第60/753,633号
【特許文献50】英国特許第0600828.8号
【特許文献51】英国特許第2434442号
【特許文献52】米国特許第60/761,870号
【特許文献53】英国特許第0611618.0号
【特許文献54】英国特許第2440386号
【特許文献55】米国特許第60/804,537号
【特許文献56】英国特許第0711461.4号
【特許文献57】英国特許第2450131号
【特許文献58】米国特許第60/943,801号
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は、既存のシステムの知られている短所を考慮して企図された。
【課題を解決するための手段】
【0006】
第1の態様からみると、本発明は、読取り体積内に配置される物品からシグネチャを決定するための装置を提供する。本装置には、集束された非コヒーレント光線を生成して順次に読取り体積の複数の異なる領域の各々上に導くように動作可能な発生器を備える。本装置は、前記光線が前記読取り体積の異なる領域からが散乱するときに得られた信号から一群のデータ点からなるセットを集めるように動作可能な検出器配列構成であって異なる前記一群のデータ点が前記読取り体積のそれぞれの異なる領域からの散乱に関連する検出器装置と、前記一群のデータ点のセットから物品のシグネチャを決定するように動作可能なデータ収集および処理モジュールと、を更に備える。このことにより、レーザー照明を用いずに、信頼性が高く且つ再生可能なシグネチャが物品の表面に対して得られることが可能である。
【0007】
いくつかの実施例において、発生器はがLEDアレイのような構造化光源を備える。他の実施例において、発生器は、例えば単一のLED、蛍光灯またはフィラメント灯のような熱光源のような非構造化光源から成る。このように様々な異なる非コヒーレント照明光源が用いられ得る。
【0008】
いくつかの実施例において、発生器は前記光線を集光させて前記読取り体積内に細長い焦点を得るように動作可能である。いくつかの実施例において、前記細長い焦点の短い寸法が100μm未満である。他の実施例において、前記細長い焦点の短い寸法が50μm未満である。いくつかの実施例において、前記細長い焦点の長い寸法が3mm〜50mmの範囲内であるこのようにターゲットの表面の比較的広い領域のスキャンは、狭く焦束された光線の単一のパスで実行できる。
【0009】
いくつかの実施例において、前記発生器は、前記非コヒーレント光線を平行化して該平行化された光線を集光させるための配置構成を備える。このように、光線は、次の集光させるステージでレーザー光線として扱われることができる。
【0010】
他の態様からみると、本発明は、読取り体積内に配置される物品からシグネチャを決定する方法を提供する。方法は、集光された非コヒーレント光線を読取り体積内の複数の異なる領域のそれぞれ上に順次に導くステップを備える。本方法は、前記光線が前記読取り体積の異なる領域から散乱するときに得られた信号からデータ点の群から成るセットを集めるステップであって該データ点の群の異なるものが前記読取り体積のそれぞれの異なる領域からの散乱に関するステップと、前記データ点の群のセットから前記物品のシグネチャを決定するステップと、を更に備える。ことにより、レーザー照明を用いずに物品の表面に対して信頼でき且つ再生可能なシグネチャを得られることが可能である。
【0011】
いくつかの実施例において、前記非コヒーレント光線が例えばLEDアレイの構造化光源からのものである。いくつかの実施例において、前記非コヒーレント光線が例えば単一のLED、蛍光灯又はフィラメント灯等の熱光源のような非構造化光源からのものある。このように、様々な異なる非コヒーレント照明光源が、用いられることが可能である。
【0012】
いくつかの実施例において、本方法は、前記光線を集光させて前記読取り体積内に細長い焦点を得るステップを更に備える。いくつかの実施例において、前記細長い焦点の短い寸法が100μm未満である。他の実施例において、前記細長い焦点の短い寸法が50μm未満である。いくつかの実施例において、前記細長い焦点の長い寸法が3mm〜50mmの範囲内にある。このように、ターゲットの比較的広い領域のスキャンが、狭く焦束された光線の単一のパスによって実行される。
【0013】
いくつかの実施例において、本方法は、前記非コヒーレント光線を平行化して該コリメートビームを集光させるステップを更に含む。このように、光線は、次の集光させるステージによってレーザー光線として扱われることができる。本発明の他の目的および利点は、以下の説明および付属の請求項から明らかになるであろう。
【0014】
本発明をよく理解するために、またどのように実行に移すかを示すために、例えば付属の図面を参照することにする。
【図面の簡単な説明】
【0015】
【図1】読取り装置の側面略図である。
【図2】構造化された光源配列構成(source arrangemen)の概略図である。
【図3】構造化されていない光源配列構成の概略図である。
【図4】構造化されていない光源配置構成の概略図である。
【図5】読取り装置の機能的な構成要素のブロック略図である。
【図6】紙表面の顕微鏡イメージである。
【図7】非法線入射への抵抗に対する検出器開口数の効果を示す図である。
【図8】物品のシグネチャがスキャンからどのように生成されうるかを示す流れ図である。
【図9a】収集されたデータに対するハイコントラスト遷移の効果を示す略図である。
【図9b】収集されたデータに対するハイコントラスト遷移の効果を示す略図である。
【図9c】収集されたデータに対するハイコントラスト遷移の効果を示す略図である。
【図10】ビットマッチ比(bit match ratio)に対するハイコントラスト遷移の効果を示す略図である。
【図11a】遷移の上限を定める段階による収集されたデータに対するハイコントラスト遷移の効果の軽減を示す略図である。
【図11b】遷移の上限を定める段階による収集されたデータに対するハイコントラスト遷移の効果の軽減を示す略図である。
【図11c】遷移の上限を定める段階による収集されたデータに対するハイコントラスト遷移の効果の軽減を示す略図である。
【図12】遷移の上限を定める段階をどのように実行できるかを示す流れ図である。
【図13a】多数の大きな遷移を持つ表面からのデータに対する遷移の上限を定める段階の効果を示す図である。
【図13b】多数の大きな遷移を持つ表面からのデータに対する遷移の上限を定める段階の効果を示す図である。
【図14a】大きな遷移のない表面からのデータに対する遷移の上限を定める段階の効果を示す図である。
【図14b】大きな遷移のない表面からのデータに対する遷移の上限を定める段階の効果を示す図である。
【図15】スキャンから得られた物品のシグネチャがシグネチャデータベースと突き合わせてどのように検証できるかを示す流れ図である。
【図16】ビットマッチ比に対するハイコントラスト遷移の効果をどのように軽減できるかを示す略図である。
【図17】検証を目的として文書をスキャンする全体的プロセスおよびユーザーに提示される結果を示す流れ図である。
【図18】焦点を変える効果を視覚的に示す図である。
【図19A】異なる光源を用いた再現性を視覚的に示す図である。
【図19B】異なる光源を用いた再現性を視覚的に示す図である。
【図19C】異なる光源を用いた再現性を視覚的に示す図である。
【図19D】異なる光源を用いた再現性を視覚的に示す図である。
【図20】コヒーレント光源及び非コヒーレント光源を用いて反射の相対的な強度を視覚的に示す図である。
【図21】スキャン間のミスアライメント(misalignment)の視覚的に効果を示す図である。
【図22】コヒーレント及び非コヒーレント光源を用いた相対的な全体の動作を視覚的に示す図である。
【図23a】スキャン中の非理想性(non−idealities)を説明するように図18の検証プロセスを変更する方法を示す流れ図である。
【図23b】スキャン中の非理想性を説明するように図15の検証プロセスを変更する方法の他の例を示す流れ図である。
【図24A】スキャンで集めた相互相関データの一例を示す図である。
【図24b】スキャンされた物品が歪んでいる場合にスキャンで集めた相互相関データの一例を示す図である。
【図24C】スキャンされた物品が非線形速度でスキャンされた場合にスキャンで集めた相互相関データの一例を示す図である。
【発明を実施するための形態】
【0016】
本発明は、さまざまな修正および代替的形態により異なるが、特定の実施形態は、図面の実施例で示され、本明細書で詳細に説明される。しかし、図面およびその詳細説明は、本発明を開示されている特定の形態に限定することを意図していないが、それどころか、本発明は、付属の請求項により定められているような本発明の精神および範囲内に収まるすべての修正形態、等価形態、および代替え形態を対象とする。
【0017】
物品を一意に弁別するための正確な方法を提供するために、物品の表面からの光の反射に頼るシステムを使用することが可能である。このようなシステムの一例について、図1から24を参照しつつ説明する。
【0018】
本明細書で説明されている例示的なシステムは、lngenia Technologies Ltd.が開発し、販売しているものである。このシステムは、用紙、IDカードまたはパスポート、セキュリティシール、ペイメントカードなど、紙、段ボール、プラスチック、または金属品のランダム表面パターン形成を分析して与えられた物品を一意に弁別するように動作可能である。本システムは、多数の公開特許出願において詳しく説明されており、これらの公開特許出願は、例えば、2004年3月12日に出願した英国特許第0405641.2号(2005年9月14日に英国特許第2411954号として公開)、2004年8月13日に出願した英国特許第0418138.4号(2006年3月8日に英国特許第2417707号として公開)、2004年8月13日に出願した米国特許第60/601,464号、2004年8月13日に出願した米国特許第60/601,463号、2004年9月15日に出願した米国特許第60/610,075号、2004年8月13日に出願した英国特許第0418178.0号(2006年2月15日に英国特許第2417074号として公開)、2004年8月13日に出願した米国特許第60/601,219号、2004年8月13日に出願した英国特許第0418173.1号(2006年3月1日に英国特許第2417592号として公開)、2004年8月13日に出願した米国特許第60/601,500号、2005年5月11日に出願した英国特許第0509635.9号(2006年11月15日に英国特許第2426100号として公開)、2005年5月11日に出願した米国特許第60/679,892号、2005年7月27日に出願した英国特許第0515464.6号(2007年2月7日に英国特許第2428846号として公開)、2005年7月27日に出願した米国特許第60/702,746号、2005年7月27日に出願した英国特許第0515461.2号(2007年2月14日に英国特許第2429096号として公開)、2005年7月27日に出願した米国特許第60/702,946号、2005年7月27日に出願した英国特許第0515465.3号(2007年2月14日に英国特許第2429092号として公開)、2005年7月27日に出願した米国特許第60/702,897号、2005年7月27日に出願した英国特許第0515463.8号(2007年2月7日に英国特許第2428948号として公開)、2005年7月27日に出願した米国特許第60/702,742号、2005年7月27日に出願した英国特許第0515460.4号(2007年2月14日に英国特許第2429095号として公開)、2005年7月27日に出願した米国特許第60/702,732号、2005年7月27日に出願した英国特許第0515462.0号(2007年2月14日に英国特許第2429097号として公開)、2005年7月27日に出願した米国特許第60/704,354号、2005年9月8日に出願した英国特許第0518342.1号(2007年3月14日に英国特許第2429950号として公開)、2005年9月8日に出願した米国特許第60/715,044号、2005年10月28日に出願した英国特許第0522037.1号(2007年5月2日に英国特許第2431759号として公開)、2005年10月28日に出願した米国特許第60/731,531号、2005年12月23日に出願した英国特許第0526420.5号(2007年7月27日に英国特許第2433632号として公開)、2005年12月23日に出願した米国特許第60/753,685号、2005年12月23日に出願した英国特許第0526662.2号、2005年12月23日に出願した米国特許第60/753,633号、2006年1月16日に出願した英国特許第0600828.8号(2007年7月25日に英国特許第2434442号として公開)、2006年1月25日に出願した米国特許第60/761,870号、2006年6月12日に出願した英国特許第0611618.0号(2008年1月30日に英国特許第2440386号として公開)、2006年6月12日に出願した米国特許第60/804,537号、2007年6月13日に出願した英国特許第0711461.4号(2008年12月17日に英国特許第2450131号として公開)、2006年6月13日に出願した米国特許第60/943,801号を含み(すべてCowburnらが発明した)、これらの特許出願のそれぞれおよびすべての内容は、参照により本明細書に組み込まれる。
【0019】
示されているように、本発明はインジェニアテクノロジー社(lngenia Technologies Ltd.)の発明者の以前の作業に関連して開発された。しかしながら、先行する作業の多くはターゲットを照らすレーザー光源の使用に関する一方、本明細書における開示は、ターゲット表面を照らし、ターゲット表面からユニーク弁別器を得るレーザー光源以外の光源の使用に関する。
【0020】
図1は、読取り装置の側面略図である。光学式読取り装置1は、装置の読取り体積内に配列された物品(図示せず)からシグネチャを測定するものである。読取り体積は、筐体12内のスリットである読取り開口10により形成される。筐体12は、装置の主要光学コンポーネントを収納する。スリットは、x方向に大きな広がりを持つ(図面内の差し込み軸を参照)。主光学コンポーネントは、光線15を発生するための光源14およびこの例では、k=2として、16aおよび16bというラベルが付けられた複数のk個の光検出器要素からなる検出器配置構成16である。レーザー光線15は、集束配置構成18により、y方向に延在し(図面の平面に対し垂直)、読取り開口の平面内に置かれる引き延ばされた焦点に集束される。一例の読取り装置では、引き延ばされた焦点は、寸法約5mmの長軸および寸法約40マイクロメートルの短軸を有する。これらの光学コンポーネントは、サブアセンブリ20に収納される。示されている例では、検出器要素16a、16bは、読取り体積内に存在する物品から反射して散乱した光を集光するために光線軸から異なる角度でオフセットされた光線軸のいずれかの側に分配される。一例では、オフセット角は±45度であり、他の例では、この角度は−30から+50度までの範囲内である。光線軸のいずれかの側の角度は、集められるデータ点ができる限り独立したものとなるように等しくならないように選択されうる。しかし、実際には、これは操作に本質的なものではなく、検出器を入射光線のいずれかの側に等しい角度で有することは、完全に動作可能な配置構成をもたらすと判断された。検出器要素は、共通平面内に配列される。光検出器要素16aおよび16bは、コヒーレント光線が読取り体積から散乱したときに筐体上に配置されている物品から散乱された光を検出する。例示されているように、光源は、z方向に光線軸を持つレーザー光線15を方向付けるように取り付けられ、光線は法線入射で読取り開口内の物品に当たる。
【0021】
ターゲット表面に光線15の焦点を十分に密着して提供するために、非レーザー光源がどのように配置され得るかについて、幾つかの実施例を用いて以下説明する。
【0022】
図2は、光源が構造化光源(structured source)である配置構成を示す図である。この例で、構造化光源は、LED41の線形アレイである。線形アレイ41からの光は、レンズ42によって、細長いターゲット又は線形焦点43に焦束される。例示される実施形態において、光学配置構成では、アレイとレンズとの間に間隔と、レンズとターゲットとの間の間隔がレンズの焦点距離の2倍になっている。
距離に適用される一般原則は、
1/D1+1/D2=1/fA
ここで、fAはレンズの焦点距離であり、D1はレンズと光源との間の距離であり、D2はレンズと所望の焦点との間の距離である。
【0023】
図2の実施例において、構造化光源は、それぞれが15μm×22μmの寸法と44μmピッチとを有する256の個々のLED素子の線形LEDアレイである。図2の光学配置構成を用いて、線形焦点は、集光される線の幅が100μm未満であるところで得られる。焦点深度(depth of focus)は、所望の焦点サイズと実効開口数(effective numerical aperture)を含む他の要素に依存している。本実施形態において、500μmオーダーの焦点深度を直接に得ることができる。より大きな焦点深度は、光学配置構成を変えることによって、達成できる。
【0024】
他のLEDアレイサイズが、使われることもできる。LEDアレイの長さがターゲット上の線形焦点の所望の長さに対応しない場合、レンズ43は、線形焦点を引き延ばすように、配置されることができ、または追加レンズ素子が線形焦点を引き延ばすために用いることができる。
【0025】
図3は、例えばLED、フィラメント灯(熱光源)または蛍光灯44の非構造化光源を備える配置構成を示す。この実施例において、開口は、ランプ44により出射された光を「形づくって」、レンズ46が光を所望の引き延ばされた焦点又は線形焦点に焦束するように用いられる。例示される実施形態において、光学配列構成では、アレイとレンズとの間の間隔と、レンズとターゲットの間の間隔とがレンズの焦点距離の2倍になるようになっている。距離に適用される一般原則は、以下の通りである:
1/D1+1/D2=1/fA
fAはレンズの焦点距離であり、D1はレンズと光源との間の距離であり、D2はレンズと所望の焦点との間の距離である。
【0026】
図3の実施形態において、開口は、8mm×50μmの寸法を有する。図3の光学配置構成を用いることで、線形焦点は、集束された線の幅が100μm未満であるところで得ることができる。焦点深度は、所望の焦点サイズと実効開口数を含む他の要素に依存している。本実施形態において、500μmオーダーの焦点深度が直接に達成され得る。より大きな焦点深度は、光学配置構成を変えることによって、達成することが可能である。
【0027】
他の開口サイズが、使われることもできる。開口の長い軸がターゲット上の線形焦点の所望の長さに対応しない場合には、レンズ43は、線形焦点を引き延ばすように配置されることができ、または、追加レンズ素子が、線形焦点を引き延ばすために用いられることが可能である。
【0028】
図4は、非構造化光源の使用のための代替的な配置構成を示す。この例においても、非構造化光源は、例えばLED、フィラメント灯(熱光源)または蛍光灯44の光源である。光源44から出射された光は、開口47bと第2の平凸レンズ47cを介して光を焦束するように配置された平凸レンズ47aの配置構成によって、平行化されて、平行な出力を達成する。第1のレンズ47aと開口と間の間隔は、レンズ47aの焦点距離であり、開口と第2のレンズ47cと間の間隔は、レンズ47cの焦点距離である。一旦、配置構成47によって、平行化された光線が生成すると、平行化された光線が集光される方法と類似の方法で、平行化された光線は集束レンズ(focussing lens)48により焦束されることができる。本実施形態において、レンズ48は、所望の線形焦点への集光を提供し、円柱状レンズのようなレンズとして用いられる。
【0029】
図3および4の実施形態において、ソースは、構造化アレイ以外の配置されるLEDであることができ、所与の出力強度を得るために必要である場合には、複数のLEDを含むことができる。一実施例において、赤いスペクトルを有する光を出射するLEDが用いられ得る。光源は、代替的にフィラメント灯(白熱灯または熱ソース)であることができ、所与の出力強度を得る必要である場合には、複数のランプを含むことができる。一実施例において、ハロゲン灯が使われることができる。また、光源は、蛍光灯、または放電ランプであることができ、所与の出力強度を得る必要である場合には、複数のランプを含むことができる。
【0030】
図1を再度参照すると、光線は、図2、図3および図4に関して説明したもののうちの1つのような集束配置構成によって、(図面の平面と直角をなす)y方向において、延在していると共に読取り開口の平面にある細長い焦点に集光される。一実施例の読者において、細長い焦点は、約5mmの長軸寸法と、40マイクロメートルの短軸寸法とを有する。これらの光学部品は、サブアセンブリ20に含まれる。
【0031】
一般に、焦点深度は大きく、z方向に位置する物品に違いがある結果、読取り開口の平面内の光線のサイズが著しく変化しないことが望ましい。焦点深度、開口数、および作動距離のパラメータは、相互に依存しており、その結果、スポットサイズと焦点深度との間によく知られているトレードオフの関係が生じる。いくつかの配置構成では、焦点は調節可能であり、距離測定手段を用いることで、利用可能な被写界深度の範囲内に置かれている物品を狙うように焦点を調節することができる。
【0032】
ターゲット物品上の点の数を読み取れるようにするために、物品および読取り装置を、入射光線および関連する検出器がターゲット物品に相対的に移動できるように配列することができる。これは、物品、スキャナアセンブリ、またはその両方を移動させることによって配列することができる。いくつかの例では、物品を読取り装置筐体に隣接する適所に保持することができ、スキャナアセンブリが読取り装置内で移動して、この移動を引き起こしうる。あるいは、物品は、例えば、物品がコンベヤ上で移動するときに物品が固定位置スキャナを越えて移動する生産ラインの場合に、スキャナアセンブリを越えて移動することができる。他の代替的実施形態では、物品とスキャナの両方を静止状態に保持するが、指向性合焦手段により、非コヒーレント光線はターゲット上を横断して進行する。これは、検出器が光線とともに移動することを必要とするか、またはターゲット上の光線のすべての入射位置からの反射を受け取るように静止している検出器を位置決めすることができる。
【0033】
図5は、上述のような読取り装置の論理コンポーネントのブロック略図である。光発生器14は、制御およびシグネチャ生成ユニット36によって制御される。適宜、モーター22も、制御およびシグネチャ生成ユニット36によって制御されうる。適宜、何らかの形態の運動検出または線形化手段(19として示されている)が読取り装置を通り過ぎるターゲットの運動を測定するように、および/または相対的移動における非線形性を測定し、そうして説明するように実装されている場合、これは、制御およびシグネチャ生成ユニット36を使用して制御されうる。
【0034】
ターゲット表面スキャン領域からの集光された光線の反射は、光検出器16によって検出される。上述のように、いくつかの例では複数の光検出器を備えることができる。光検出器16からの出力は、アナログ/デジタルコンバータ(ADC)31によって2値化されてから、制御およびシグネチャ生成ユニット36に渡されて処理され、特定のターゲット表面スキャン領域に対するシグネチャを生成する。ADCは、データ取り込み回路の一部であるか、または独立したユニットであるか、または制御およびシグネチャ生成ユニット36のマイクロコントローラまたはマイクロプロセッサに一体化されうる。
【0035】
制御およびシグネチャ生成ユニット36は、集光光線存在入射配置情報を使用して、光検出器反射情報の集合毎にスキャン領域配置を決定することができる。これにより、スキャン領域のスキャンされる部分のすべてまたは選択された部分に基づくシグネチャを作成することができる。スキャン領域の全体ではなく一部がシグネチャに含まれる場合、シグネチャ生成ユニット36は、シグネチャを生成するときにスキャン領域の他の部分から受け取ったデータを単純に無視するだけである。あるいは、スキャン領域全体からのデータを、ターゲットからの画像型データの位置決めまたは収集などの他の目的に使用する場合、そのような追加の目的のためにデータセット全体が制御およびシグネチャ生成ユニット36によって使用され、その後、その追加の目的が完遂された後に保持されるか、または破棄されうる。
【0036】
これからわかるように、図5に示されているさまざまな論理要素は、さまざまな装置の組み合わせによって物理的に具現化されうる。例えば、いくつかの状況では、これらの要素のすべてをスキャン装置内に収めることができる。他の状況では、スキャン装置は、光発生器14、モーター22(もしあれば)、および光検出器16のみを備え、残りすべての要素を別の1つまたは複数の物理的ユニット内に配置することができる。論理要素の物理的分配の他の組み合わせも使用することができる。また、制御およびシグネチャ生成ユニット36をいくつかの独立した物理的ユニットに分割することもできる。例えば、光発生器14およびモーター(もしあれば)を実際に制御する第1のユニット、集光された光線の現在の入射配置の情報を計算する第2のユニット、シグネチャを生成するために使用されるスキャンデータを弁別する第3のユニット、およびシグネチャを実際に計算する第4の部分がありうる。
【0037】
ADC 31および/または制御およびシグネチャ生成ユニット36によって実行される処理ステップの一部または全部を、特定用途向け集積回路(ASIC)または専用アナログ処理回路などの専用処理配置構成を用いて実行することができる。代替えとして、またはそれに加えて、光線のADC 31および/または制御およびシグネチャ生成ユニット36によって実行される処理ステップの一部または全部を、従来のパーソナルコンピュータ、ポータブルコンピュータ、ハンドヘルドコンピュータ(例えば、パーソナルデジタルアシスタントつまりPDA)、またはスマートフォンで使用されているような、デジタルシグナルプロセッサまたは汎用プロセッサなどのプログラム可能な処理装置を使用して実行することができる。プログラム可能な処理装置が使用される場合、所望の機能をプログラム可能な装置に実行させるために1つまたは複数のソフトウェアプログラムを使用することができることは理解されるであろう。このようなソフトウェアプログラムは、磁気ディスクもしくは光ディスクなどの持ち運べる媒体上に、またはデータ通信チャネルを介して伝送される信号に具現化されうる。
【0038】
これらの例のシステムが読み取ることができる表面特性を示すために、図6および7には、紙製品とプラスチック製品の表面がそれぞれ示されている。
【0039】
図6は、画像が約0.5×0.2mmの面積を覆う紙表面の顕微鏡画像である。この図は、紙など、肉眼で見て平坦な表面が、多くの場合、顕微鏡スケールでは高度に構造化されていることを示すために含まれている。紙の場合、表面が紙を構成する木材または他の植物由来の繊維の互いに絡み合う網の結果として顕微鏡的に高度に構造化されている。この図は、さらに、10ミクロン程度の木材繊維に対する特性長スケールも例示している。この寸法は、非コヒーレント光線の光波長と正しい関係を有し、回折を引き起こし、また繊維の向きに依存するプロファイルを有する散漫散乱を引き起こす。したがって、読取り装置が特定の商品クラスに合わせて設計される場合、スキャンされる商品のクラスの構造特徴サイズに合わせて光の波長を修正することができることは理解されるであろう。また、それぞれの紙片の局所的表面構造が、個々の木材繊維がどのように配列されるかに依存するという点で独特であることは明白である。そのため、紙片は、自然の法則に従うプロセスにより作られた結果として独自の構造を有するという点で、従来技術の特別な樹脂トークンまたは磁気材料堆積などの特別に作られたトークンと決して異ならない。同じことが、他の多くの種類の物品にも当てはまる。
【0040】
図7は、プラスチックの表面に対する同様の画像である。この原子間力顕微鏡画像は、明らかに、肉眼で見て滑らかなプラスチック表面が凸凹していることを示している。図から推察できるように、この表面は、図6に例示されている紙表面よりも滑らかであるが、この微細レベルのプラスチック表面上の表面起伏でも、本発明の実施例のシグネチャ生成スキームを使用して一意に識別することができる。
【0041】
言い換えると、一意的な特性がさまざまな日常品から直接的な形で測定可能である場合に、専用のトークンを製作する労力と費用まで進むのは本質的に無意味である。物品の表面(または透過の場合には内部)の自然構造を利用する散乱信号のデータ収集および数値処理について説明する。
【0042】
上述の図1に示されているように、表面から反射する集束光は、多数の検出器16によって集光される。検出器は、検出器の領域一面にわたって反射光を受光する。反射光は、光の入射位置のところの表面に関する情報を含む。上述のように、この情報は、光顕レベルで表面の表面粗さに関する情報を含みうる。この情報は、反射光の観察されたパターン内の特徴の波長の形態で反射光によって伝えられる。これらの波長特徴を検出することによって、表面の表面構造に基づき指紋またはシグネチャを導出することができる。表面上の多数の位置で反射を測定することによって、指紋またはシグネチャは表面の大きなサンプルに基づくものとしてよく、これにより、後日表面を再度読み取った後に、後からの読取りで得られるシグネチャと最初の読取りで得られるシグネチャとのマッチングが容易になる。
【0043】
反射光は、2つの主角波長または角周波数領域における情報を含む。高い角周波数(短波長)情報は、従来からスペックルと呼ばれているものである。この高い角周波数成分は、典型的には、0.5度程度の角周期性を有する。典型的には、15度程度の角周期性を典型的には有する低角周波数(長波長)情報もある。
【0044】
上述のように、それぞれの光検出器は、θnと呼ばれる立体角上で反射光を集光する。本発明の説明では、それぞれの光検出器は正方形または円形の領域上で集光するものとする。集光の立体角は、光検出器16が異なれば異なる可能性がある。それぞれの光検出器16は、θrと呼ばれる表面からの最小角度を有する反射光を測定する。したがって、与えられた光検出器16によって検出された光は、θrからθr+θnまでの表面に関するある角度を有する反射光線を含む。以下でさらに詳しく説明するように、可能な最大の角度によって隔てられた検出器チャネルを有する点でなりすましに対抗できるシステムを形成することには有利な点があると思われる。これにより、角度θrはできる限り小さな角度になる。
【0045】
これからわかるように、光検出器16が反射光を検出する立体角θnは、
NA=sin(φ)
である開口数(NA)として表すこともできるが、
ただし、φは検出器を出入りすることができる最大光錐の半角である。したがって、本発明の例における検出器の開口数は、
NA=sin(θn/2)
である。そこで、大きな開口数を有する光検出器は、より多くの光量(つまり、より多くの光子)を集める可能性があるが、これは、すべての取り込まれた情報スペックルの総和が弱いものとなるように反射された情報(スペックル)のうちのより多くの情報を平均化する効果を有する。しかし、長角波長成分は、短角波長(従来のスペックル)成分に比べて平均化の影響を受けにくく、そのため、これは、長波長と短波長の反射信号の比を改善する効果を有する。
【0046】
図1には、集束コヒーレント光線は、表面に法線入射すると示されているけれども、実際には、完全な法線入射を保証することは困難な場合があることは理解されるであろう。これは、低コストの読取り装置が提供される状況、訓練をほとんど、または全く受けていないユーザーによって位置決めが実行される状況、または例えば、物品を運ぶコンベヤを含む、商業的処理環境など、物品の位置決めをユーザーがコントロールできない状況、および読取り装置から物品までの距離が、読取り装置と物品との間に物理的接触がないような距離である状況では、特に当てはまる。したがって、実際、ほぼ入射集束非コヒーレント光線が完全な法線方向から物品に当たることはないと言ってよい。
【0047】
図8は、物品のシグネチャがスキャンからどのように生成されうるかを示す流れ図である。
【0048】
ステップS1は、光検出器のそれぞれにおける光強度がスキャンの全長上にそったいくつもの位置で取得されるデータ収集ステップである。それと同時に、符号器信号は、時間の関数として取得される。スキャンモーターが非常に高い線形化精度(例えば、ステッパーモーターのように)を有する場合、またはデータ中の非線形性をブロック毎の分析またはテンプレートマッチングを通じて除去できる場合、データの線形化は必要ないと思われる。上記の図5を参照すると、データは、ADC 31からデータを取り出すシグネチャ生成器36により取得される。それぞれのスキャンで集められる光検出器1つ当たりのデータ点の個数は、以下においてNとして定義される。さらに、値ak(i)は、光検出器kからのi番目の格納されている強度値として定義され、iは、1からNまでの値を取る。
【0049】
ステップS2は、時間領域フィルターを取り込まれたデータに適用するオプションのステップである。本発明の例では、これは、ターゲットが集光光線以外の光源からの照射にも曝される場合に現れることが予想されるような50/60Hzおよび100/120Hz帯域の信号を選択的に除去するために使用される。これらの周波数は、螢光照明などの室内照明を駆動するためにごく普通に使用されるものである。
スキャンのための照明光源が、光源に電力を供給するために必要な如何なるAC周波数を除外しない、例えばフィラメント灯または蛍光灯の非構造化光源ことに注意されたい。
【0050】
ステップS3は、データのアライメントを実行する。いくつかの例では、このステップは、数値補間法を使用して、符号器遷移が均等な時間間隔で並ぶようにak(i)を局所的に拡大、縮小する。これは、モーター速度の局所的変動およびデータ中の他の非線形性の補正を行う。このステップは、シグネチャ生成器36によって実行されうる。
【0051】
いくつかの例では、スキャン領域が所定のパターンテンプレートに対応する場合に、取り込まれたデータを知られているテンプレートと比較し、並進および/または回転調節を取り込まれたデータに適用してテンプレートに合わせてデータのアライメントを行うことができる。また、引き伸ばしおよび収縮調節を取り込まれたデータに適用し、物品に相対的なスキャンヘッドの通過がテンプレートが構築されたのと異なる状況においてテンプレートに合わせてアライメントを行うことができる。したがって、線形スキャン速度を使用してテンプレートを構築する場合、速度の非線形性が存在しているデータのスキャンが実行された場合にテンプレートとマッチするようにスキャンデータを調節することができる。
【0052】
ステップS4は、信号強度に上限を定めるオプションの操作を適用し、テキスト印刷がなされている表面および例えばハーフトーン印刷がなされている表面を含む、例えば、高度な印刷表面を有する物品で発生する特定の問題に対処する。問題点は、非マッチ結果においてマッチスコアが増大し、これにより、非マッチ結果とマッチ結果との間の隔たりが縮小する傾向があるという点である。
【0053】
これは、結果として得られるシグネチャのそれぞれのビットのランダム性に関するスキャンされた表面に対する急激なコントラスト変化のランダム性のない効果によって引き起こされる。簡単に言うと、急激なコントラスト変化により、多数の非ランダムデータビットがシグネチャに入り、したがってこれらの非ランダムビットは同様の印刷がなされているか、または同様のパターンが形成された物品のスキャンで互いにマッチする。図10は、このプロセスをさらに詳しく示している。
【0054】
図9aは、物品上のスキャン領域50を示しており、スキャン領域は第1の表面色を有する2つの領域51および第2の表面色を有する領域52を有する。この表面色の遷移の効果は、図9bに示されており、そこでは、スキャン装置によって取り込まれた反射信号の強度がスキャン領域の長さにそってプロットされている。これからわかるように、強度は、第1の表面色が存在するときに第1のレベルに、第2の表面色が存在するときに第2のレベルに従う。第1および第2のレベルのそれぞれにおいて、信号強度に僅かな変動が生じる。これらの小さな変動は、シグネチャの導出元の情報コンテンツである。
【0055】
図9bの第1のレベルと第2のレベルとの間の階段状変化が結果として得られるシグネチャを実際に引き起こすという問題が、図9cに例示されている。図9cは、ACフィルター(ステップS4に関して以下で説明されている空間領域帯域通過フィルターなど)を適用した後の図9bからの強度データを示している。図9cから、2次フィルターなどの高次フィルターであっても、スキャン領域上の表面パターンのそれぞれの急激な遷移の後、小さな強度変動が喪失する領域が発生することは明らかである。したがって、領域53内のデータビット位置毎に、シグネチャで終わるデータビットの値は、それらの位置で実際に発生した強度の小さな変動に関係なく、ゼロになる。同様に、領域54内のデータビット位置毎に、シグネチャで終わるデータビットの値は、それらの位置で実際に発生した強度の小さな変動に関係なく、1になる。
【0056】
2つの類似の物品がスキャン領域上で公称的に同一の表面印刷またはパターン形成がなされていると予想できるので、そのような物品に対するすべてのシグネチャは、表面パターン/印刷/色の階段状変化に対応する位置においてシグネチャ内にすべて1および/またはすべて0のデータビットのほぼ同じ領域を有すると予想されうる。したがって、これらの領域により、異なる物品同士の比較に対する比較結果値が人工的に増加し、マッチ結果と非マッチ結果との間の隔たりが減少する。この減少した隔たりは、図13に例示されており、そこでは、単一の物品の異なるスキャン同士の比較に対するピーク(つまり、マッチ結果)が約99%のビットマッチ比を中心とするが、異なる物品のスキャンに対し比較が実行される第2の最良マッチに対するピークは約85%のビットマッチ比を中心とすることがわかる。通常の状況下では、この様な表面パターン形成効果が発生しない場合、非マッチピークは50%にかなり近づくと予想される。
【0057】
上で指摘されているように、このような遷移によって引き起こされるデータ損失を最小限に抑える第1のアプローチは、高次フィルターを使用して回復時間を最小にし、これによりそれぞれのスキャン表面遷移の影響を受けるシグネチャキットの個数を最小にする段階を伴う。
【0058】
この後説明されるように、そのスキャン表面のスキャンから導出されるシグネチャのビットに対するそのようなスキャン表面遷移の影響を最小にするさらに入り組んだアプローチを取ることもできる。特に、大きすぎてシグネチャをもたらす表面のテクスチャまたは粗さを表すいくつもの小さな変動のうちの1つの小さな変動となりえない強度変動が発生していることを検出するためのシステムを実装することができる。そのような遷移が検出された場合、遷移の大きさは、ACフィルターが適用されフィルターの回復時間をさらに短縮する前に、チョッピングされるか、または上限が定められうる。これは、図11に示されている。図11aは、図9aと同一であり、パターン形成された領域を持つスキャン領域を示している。図11bは、パターン形成された領域の間の遷移の上限を定められた大きさを示し、図11cは、結果としてすべて1およびすべて0のデータビットをもたらす領域55および56が図9cの対応する領域53および54に比べてかなり小さいことを示している。次いで、これにより、シグネチャの残り部分が基づく小さな変動を参照することなく表面パターン遷移の直接的な結果として0または1の値を採用するように強制されるシグネチャ内のビットの数が減らされる。
【0059】
そのような遷移を検出する最も簡単な方法の1つは、スキャンデータの比較対象とするテンプレートを持たせてスキャン長上にあるいくつかの点で自動的に遷移に上限を定めることなどによってそのような遷移がいつ現れるかを知るものである。このアプローチには、物品に対するスキャナの位置決めの誤りを考慮するようにスキャンデータに対しテンプレートのアライメントを行う必要があること、および使用すべきテンプレートを知るためにどのような種類の物品をスキャンするのかがスキャナ側に予め知られている必要があることという2つの短所がある。
【0060】
そのような遷移を検出するための他の方法では、大きな遷移を見つけるために例えば標準偏差に基づく計算を利用する。しかし、そのようなアプローチには、典型的に、遷移のない長い期間があるという問題があり、そのため、スキャンされた物品に何らかの/多数の遷移がない場合に誤差が入り込む可能性がある。
【0061】
このようなアプローチの欠点を解消するために、以下の技術を使用して、スキャン領域が印刷/パターン形成を含んでも含まなくても等しく正常に機能し、スキャンする物品を予め知っていることを必要としないシステムを構成することができる。こうして、本発明の例において、選択的なステップS4で取られるアプローチが図12に示されている。
【0062】
最初にステップD1において、強度値を微分して、一連の微分値を出力する。次いで、ステップD2で、値を低値で選択できるように微分値をパーセンタイルにより分析する。本発明の例では、従来通り50パーセンタイルが使用されうる。50パーセンタイルの前後または50パーセンタイル以下の他のパーセンタイル値も使用できる。
【0063】
次いで、ステップD3で、スケーリング係数により選択されたパーセンタイルで値をスケーリングすることによって閾値を決める。スケーリング係数は、経験的に導き出すことができるが、広範な表面材料タイプに対し1つのスケーリング係数が適用可能である。本発明の例では、2.5のスケーリング係数が、紙、段ボール、光沢紙、および光沢段ボールを含む、多くの異なる表面材料タイプに使用される。
【0064】
次いで、ステップD4で、微分値のすべてを閾値と比較する。閾値より大きい値を持つ微分をゼロ値に設定する。微分値の閾値チェックが済んだら、ステップD5で、修正された微分を再度積分する。
【0065】
本発明の例では、これらのステップはすべて、光検出器からのアナログデータを複数レベルのデジタル値に変換した後に実行される。光検出器がアナログ信号ではなくデジタル強度信号を出力する例では、2値化は不要である。
【0066】
したがって、このシステムは、大きすぎて表面のテクスチャ/粗さ応答とならない大きな遷移を見つけて、それらの遷移に上限を定め、テクスチャ/粗さ応答データが大きな遷移でマスクされるのを回避する。
【0067】
高度印刷表面からのデータに対するステップS4の効果は、図13aおよび13bに例示されている。図13aは、一連のハイコントラストストライプがスキャン方向を横断する表面から取り出されたデータに対して、選択的なステップS4を実行する直前のデータを示している。ステップS4による処理の後の同じデータセットが図13bに示されており、そこでは、保存される表面情報の量は、ハイコントラスト遷移にも関わらず高いことがわかる。
【0068】
比較により、図14aおよび14bは、S4で実装されたシステムは、ハイコントラスト印刷遷移なしではデータの問題を引き起こさないことを例示している。図14aは、平面から取り出されたデータに対して、ステップS4を実行する直前のデータを示している。ステップS4による処理の後の同じデータセットが図14bに示されており、そこでは、表面情報の量は、S4のプロセスを実行するにも関わらず減少しないことがわかる。
【0069】
ステップS5は、空間領域帯域通過フィルターを取り込まれたデータに適用する。このフィルターは、x方向(スキャンヘッドの移動方向)の一定範囲の波長を通す。フィルターは、サンプル間の減衰を最大にし、データ内の高い自由度を維持するように設計されている。これを念頭に置き、フィルター通過帯域の下限を、高速減衰が生じるように設定する。これは、ターゲット表面からの絶対強度値がシグネチャ生成の観点からは興味がないが、見かけ上類似の強度の領域間の変動は興味があるので必要である。しかし、減衰は、高速になりすぎるようには設定されず、そうすることで信号のランダム性を低減することができ、これにより、取り込まれたデータの自由度が減る。上限は、高く設定することができるが、ある種の高周波ノイズまたはx方向の値の間の何らかの平均化(スミアリング)に対する要求条件(y方向の値について上で述べたのとまったく同様に)がある場合があり、典型的には、高い上限以外には何も必要ない。いくつかの例では、2次フィルターを使用できる。一例では、ターゲット表面上を集光光線が移動する速度が、毎秒20mmである場合、フィルターは、100ミクロンのインパルス立ち上がり距離および500ミクロンのインパルス立ち下がり距離を有することができる。
【0070】
単純なフィルターを適用する代わりに、フィルターの異なる部分に重みを付けることが望ましい場合がある。一例において、適用される重み付けはかなり大きなものであり、微分などの実空間関数と同等のものを導入するために三角通過帯域を作成する。微分タイプの効果は、構造化の高い表面に対し有用であり、無相関の寄与分に関して信号からの相関のある寄与分(例えば、ターゲット上の表面印刷からの)を減衰させるために使用されうる。
【0071】
ステップS6は、2値化ステップであり、そこでは、複数レベルデジタル信号(ADCからの処理済みの出力)が2状態デジタル信号に変換され、スキャンを表すデジタルシグネチャを計算する。デジタルシグネチャは、本発明の例では、規則「ak(i)>平均は2進値「1」にマップされる」、および「ak(i)≦平均は2進値「0」にマップされる」を適用することにより得られる。2値化されたデータセットは、dk(i)として定義されるが、ただし、iは1からNまでの値を取る。物品のシグネチャは、有利には、説明したばかりの強度データの2値化されたシグネチャに加えて他のコンポーネントも含むことができる。次に、これらの他のオプションのシグネチャコンポーネントについて説明する。
【0072】
ステップS7は、小さな「サムネイル」デジタルシグネチャが作成されるオプションのステップである。いくつか例では、これは、m個の読取り値の隣接するグループをまとめて平均するか、またはcをサムネイルの圧縮係数としてc番目毎のデータ点をピックアップすることにより生成される実空間サムネイルとすることができる。後者の方法は、平均が雑音を不釣り合いに増幅する可能性があるため、好ましい方法である。他の例では、サムネイルは、シグネチャデータの一部または全部の高速フーリエ変換に基づくものとしてよい。次いで、ステップS6で使用される同じ2値化規則を縮小データセットに適用する。サムネイルデジタイズは、iを1からN/cまでの値を取るものとしてtk(i)として定義され、cは、圧縮係数である。
【0073】
ステップS8は、複数の検出器チャネルが存在する場合に適用可能なオプションのステップである(つまり、k>1の場合)。追加のコンポーネントは、複数の光検出器のうちの異なる光検出器から得られた強度データの間の計算された相互相関コンポーネントである。チャネルが2つの場合、可能な相互相関係数は1つ、チャネルが3つの場合、最大3つまで、チャネルが4つの場合、最大6つまでなどとなる。相互相関係数は、材料の種類のよい指標となることが判明しているため有用である場合がある。例えば、所与のタイプのパスポートなどの特定のタイプの文書、またはレーザープリンタ用紙では、相互相関係数は、常に、予測可能な範囲内に収まるように見える。正規化された相互相関は、ak(i)とal(i)との間で計算することができるが、ただし、k≠lであり、k,lは、光検出器チャネルの個数すべてにわたって変化する。正規化された相互相関関数は、
【0074】
【数1】
【0075】
として定義される。
【0076】
後で検証する際に使用するために格納することができる相互相関関数の他の態様は、相互相関関数のピークの幅、例えば、半値全幅(FWHM)である。検証処理において相互相関係数を使用することについて、以下で詳述する。
【0077】
ステップS9は、信号強度分布を示す単純な強度平均値を計算するもう1つのオプションのステップである。これは、ak(i)の二乗平均平方根(rms)値などの、異なる検出器に対する平均値のそれぞれの全平均またはそれぞれの検出器に対する平均としてよい。検出器が上述の読取り装置のような法線入射のいずれかの側で対として構成される場合、検出器のそれぞれの対に対する平均を使用することができる。強度値は、サンプルの全体的な反射率および粗さの単純な指標であるため、材料タイプに対するよい粗フィルタとなっていることが判明している。例えば、強度値として、平均値を取り除いた後の非正規化rms値、つまり、DCバックグラウンドを使用できる。rms値は、rms値が表面粗さに関係するという点で表面の反射率の指標となる。
【0078】
物品をスキャンすることで得られたシグネチャデータを、検証を目的としてシグネチャデータベース内に保持されているレコードと突き合わせて比較し、および/またはデータベースに書き込んで、シグネチャの新しいレコードを追加して既存のデータベースを拡張し、および/または符号化された形式で物品に書き込んで、データベースへのアクセスがあろうとなかろうと後から検証できるようにすることができる。
【0079】
新規データベースレコードは、ステップS6で得られたデジタルシグネチャ、さらには適宜、それぞれの光検出器チャネルに対しステップS7で得られたより小さなサムネイルバージョン、ステップ8で得られた相互相関係数、およびステップS9で得られた平均値を含む。あるいは、これらのサムネイルは、高速検索用に独自に最適化された別のデータベース上に格納することもでき、データの残り(サムネイルを含む)を主データベース上に格納することができる。
【0080】
図15は、スキャンから得られた物品のシグネチャがシグネチャデータベースと突き合わせてどのように検証できるかを示す流れ図である。
【0081】
単純な実装では、データベースを単に検索し、フルセットのシグネチャデータに基づいてマッチを見つけることができる。しかし、検証プロセスをスピードアップするために、本発明の例のプロセスでは、次に説明する計算で求めた平均値および相互相関係数に基づいてより小さなサムネイルおよび事前選別を使用する。このような高速検索プロセスを実現するために、検証プロセスは、2つの主要なステップに分けて実行され、第1のステップでは、今説明しているようなスキャンデータのフーリエ変換の振幅成分から導出されたサムネイルを使用し(適宜、計算された平均値と相互相関係数に基づいて事前スクリーニングを行い)、第2のステップでは、スキャンされたデジタルシグネチャと格納されている完全なデジタルシグネチャを互いに比較する。
【0082】
検証ステップV1は、検証プロセスの第1のステップであり、これは、上述のプロセスに従って物品をスキャンする、つまりスキャンステップS1からS8を実行する。このスキャンでは、既存の物品のシグネチャの1つまたは複数のレコードと突き合わせて妥当性を確認すべき物品に対するシグネチャを取得する。
【0083】
検証ステップV2では、サムネイル(スキャン信号のフーリエ変換の振幅成分から、またはスキャン信号からの実空間サムネイルとして導出された)を使用して候補マッチを探すが、これはスキャンステップS7を参照して上で説明されているように取得される。検証ステップV2では、サムネイルエントリのそれぞれを取り、それとtk(k+j)との間の一致するビットの個数を評価するが、ただし、jは、スキャンされた領域の配置の誤差を補正するように変化するビットオフセットである。jの値が決定され、次いで、一致するビットの最大数を与えるサムネイルエントリが決定される。これは、さらに処理するために使用される「ヒット」である。これに対するバリエーションは、完全デジタルシグネチャに基づく完全検査に対する複数の候補マッチを通す可能性を含めることである。サムネイル選択は、最大数、例えば、10または100の候補マッチまで通過させるなどの好適な基準に基づくものとしてよく、それぞれの候補マッチはマッチングビットの特定の閾値パーセンテージ、例えば、60%より大きいサムネイルとして定義される。最大数を超える候補マッチがある場合、最良の候補のみが渡される。候補マッチが見つからない場合、物品は破棄される(つまり、検証ステップV6にジャンプし、失敗結果を発行する)。
【0084】
本発明の例で使用されるこのサムネイルベースの検索法は、以下の理由から、全体として検索速度が改善される。サムネイルは、完全なシグネチャに比べて小さいので、完全なシグネチャを使用するよりも、サムネイルを使用した方が検索時間が短縮される。実空間サムネイルが使用される場合、完全なシグネチャを格納されているシグネチャと突き合わせてビットシフトし、マッチを判定するのを同じ方法で、サムネイルを格納されているサムネイルと突き合わせてビットシフトし、「ヒット」が生じたかどうかを判定する。サムネイル検索の結果は、推定マッチのショートリストであり、次いで、それぞれに対して、推定マッチを使用し完全なシグネチャを検査することができる。
【0085】
サムネイルがシグネチャのフーリエ変換またはその一部に基づく場合、検索時にサムネイルをビットシフトする必要がないので、さらなる利点が得られる。疑似ランダムビット列は、フーリエ変換されたときに、振幅スペクトルに情報の一部を載せ、位相スペクトルに残りを載せる。しかし、ビットシフトは、位相スペクトルにのみ影響し、振幅スペクトルには影響しない。したがって、振幅スペクトルは、ビットシフトを知らなくてもマッチングすることができる。位相スペクトルを破棄する際に一部の情報が失われるけれども、データベースと突き合わせておおよそのマッチを得るには十分である。これにより、データベース内でターゲットとの1つまたは複数の推定マッチを特定することができる。次いで、実空間サムネイルの例の場合と同様に、新規スキャンに対して従来の実空間法を使用し、これらの推定マッチのそれぞれを適宜比較することができる。
【0086】
検証ステップV3は、スキャンされたデジタルシグネチャと突き合わせてレコードに対する格納されている完全デジタルシグネチャを分析する前に実行されるオプションの事前選別検査である。この事前選別では、スキャンステップS9で得られたrms値が、ヒットのデータベースレコード内の対応する格納されている値と突き合わせて比較される。「ヒット」は、それぞれの平均値が定義済み範囲に収まらない場合に他の処理から除去される。次いで、物品が、非検証として破棄される(つまり、検証ステップV6にジャンプし、失敗結果を発行する)。
【0087】
検証ステップV4は、完全デジタル署名を分析する前に実行される他のオプションの事前選別検査である。この事前選別では、スキャンステップS8で得られた相互相関係数が、ヒットのデータベースレコード内の対応する格納されている値と突き合わせて比較される。「ヒット」は、それぞれの相互相関係数が定義済み範囲に収まらない場合に他の処理から除去される。次いで、物品が、非検証として破棄される(つまり、検証ステップV6にジャンプし、失敗結果を発行する)。
【0088】
検証ステップV4で実行することが可能な相互相関係数を使用する他のチェックでは、相互相関関数のピークの幅をチェックし、相互相関関数は、上記のスキャンステップS7のオリジナルスキャンからの格納されている値と再スキャンされた値
【0089】
【数2】
【0090】
とを比較することにより評価される。
【0091】
再スキャンされたピークの幅が、オリジナルスキャンの幅よりも著しく高い場合、これは、再スキャンされた物品が改ざんされているか、または他の何らかの形で不審であることを示す指標としてみなすことができる。例えば、このチェックで、スキャンされる表面における光検出器により予想される同じ強度変動を持つバーコードまたは他のパターンを印刷することによりシステムを欺こうとする詐欺師を打ち負かさなければならない。
【0092】
検証ステップV5は、「ヒット」として弁別された推定マッチが実際にマッチであるかどうかを判定する検査を実行する。本発明の例では、この検査は、自己較正であり、したがって、スキャンされた表面上の急激な遷移(反射光の段階状変化を引き起こす印刷パターンなど)によって引き起こされるシグネチャの喪失が回避される。これにより、処理が簡素化され、物品表面上の印刷または他のパターンによるシグネチャを構成すべきデータのうちのかなりのパーセンテージが喪失する可能性が回避される。
【0093】
ステップS4および図9から14を参照しつつ上で説明されているように、真贋判定/妥当性確認マッチ信頼度に対する表面パターン形成/印刷の影響を制限するアクションをシグネチャ生成段階で実行することができる。本発明の例では、物品表面の粗さ/テクスチャ応答によってではなく遷移効果によって設定されたシグネチャ内のデータビットのマッチ結果に対する影響を最小限に抑える追加のアプローチを取ることができる。これは、図9から14を参照しつつ上で説明されている遷移の上限を定めるアプローチが実行されるかどうかに関わらず実行されうる。
【0094】
したがって、ステップV5では、サムネイル検索を使用してヒットのショートリストが編集された後、またV4のオプションの事前スクリーニングの後に、多数のアクションが実行される。
【0095】
最初に、ショートリストシグネチャのそれぞれに対する記録シグネチャと最良の全体的なマッチ結果を有するシグネチャを選択する検査シグネチャとの間の完全なシグネチャ比較を実行する。これは、最良マッチシグネチャとして選択される。最良マッチシグネチャが実際にマッチ結果であるかどうか、または単に比較的高いスコアリングの非マッチであるかを確定するのを補助するために、シグネチャのビットのランダム性の尺度を使用して、最良マッチシグネチャに対する相互相関の結果に重みを付ける。
【0096】
シグネチャ内のビットのランダム性の尺度を確定するために、最良マッチシグネチャと、サムネイルによって識別されたショートリスト内の他のシグネチャに対する記録シグネチャとの相互相関を求める。最良マッチシグネチャに対するそれぞれのショートリストシグネチャのスライディング相互相関から、最良マッチシグネチャに対するこれらのショートリストシグネチャのそれぞれについて最良結果位置を見つけることができる。次いで、最良マッチシグネチャのそれぞれのビット値がそれぞれショートリストシグネチャのそれぞれの最良結果位置に出現する回数を測定する。
【0097】
この測定された値は、最良マッチシグネチャ内のそれぞれのビットのランダム性を表す。例えば、与えられたビット値がショートリストシグネチャのほぼ半分において同じである場合、ビットはおそらくランダムであるが、与えられたビット値がショートリストシグネチャのほぼ90%において同じである場合、ビットはおそらくランダムではない。この尺度を定量化するために、本発明の例では、ビットユーティリティ比(bit utility ratio)
【0098】
【数3】
【0099】
を定義し、使用する。
【0100】
これにより、ランダム性のよいレベルを示すビットについては、1の、または1に近いBit Utility Ratioが適用され、ランダム性の低いレベルを示すビットについては、0の、または0に近いBit Utility Ratioが適用される。上記の例を再び参照すると、与えられたビット値がショートリストシグネチャのほぼ半分において同じである場合(AverageBitBMR=0.5)、Bit Utility Ratio=1であるが、与えられたビット値がショートリストシグネチャのほぼ90%において同じである場合(AverageBitBMR=0.9)、Bit Utility Ratioは0.04である。
【0101】
次いで、最良マッチシグネチャのそれぞれのビットについて計算したBit Utility Ratioを使用して、検査シグネチャと最良マッチシグネチャとの間の比較について相互相関の結果に重みを付ける。したがって、従来実行されるような相互相関におけるそれぞれのビット比較に対する比較結果を単に総和する代わりに、それぞれのビットに対するBit Utility Ratioを使用してビット結果の総和がなされる前にそれぞれのビット結果に重みを付ける。そこで、相互相関の総和結果は、重み付けが適用されない場合に、f(i)は検査シグネチャのi番目の値を表し、g(i)は記録シグネチャのi番目の値を表すものとして
【0102】
【数4】
【0103】
として定義されるが、相互相関の総和結果は、Bit Utility Ratio (BUR)を重み付けとして使用する場合に、BUR(i)は記録シグネチャのi番目に対するビットithのBit Utility Ratioを表すものとして、
【0104】
【数5】
【0105】
として定義される。
【0106】
次いで、この補正されたBit Match Ratioを使用して、最良マッチ記録シグネチャが実際に検査シグネチャと同じ物品から取られたかどうかを評価することができる。図16は、図10との比較により、単一の物品の異なるスキャン同士の比較に対するピーク(つまり、マッチ結果)が約97%のビットマッチ比を中心とするが、今度は、異なる物品のスキャンに対し比較が実行される第2の最良マッチに対するピークは約55%のビットマッチ比を中心とすることを示している。したがって、非マッチとマッチとの区別は、かなり明確であり、また区別できる。
【0107】
当業者には明らかなように、本発明の例で実装された2つのプロセスはそれぞれ、別々に、物品表面上の印刷もしくはパターン形成により間違った結論に到達するマッチ結果を回避することに著しく寄与している。したがって、これらの技術のいずれか(または両方)の実装により、単一の真贋判定または検証システムをさまざまな物品タイプ上で作動させることができ、しかも、どの物品タイプが考えられているかを知る必要もなく、または書き込む前に記録シグネチャデータベースを事前再構成する必要もない。
【0108】
代替な実施例において、EP1,730,675Aにおいて説明したようなステップV5の実行方法が実施例の代わりに、使われることができる。
【0109】
検証ステップV6は、検証プロセスの結果を発行する。紙の上で実施した実験では、これは、呼応しているビットの75%がよい、または優れているマッチを表すが、呼応するビットの50%が非マッチを表すことが一般的に判明した。
【0110】
与えられた結果がマッチまたは非マッチを表すかどうかの判定を、閾値または閾値の集合に対して実行する。マッチと非マッチとの間で必要な区別のレベルは、特定の用途における偽陽性と偽陰性に対する感度レベルに応じて設定されうる。閾値は、絶対BMR値に関係し、および/またはショートリストに入っている記録シグネチャからの非マッチ結果のグループに対するピーク幅の尺度を含み、および/または最良の結果と2番目に最良の結果との間のBMRの隔たりの尺度を含むことができる。
【0111】
例えば、100万個のレコードを含み、それぞれのレコードが128ビットのサムネイル(フーリエ変換振幅スペクトルから、または実空間サムネイルとして導出される)を含む、データベースを検索できる時間は、標準的な2004年仕様のPCコンピュータ上で1.7秒であることが実験で判明している。1000万個のエントリを検索するには、17秒を要する。最新のコンピュータおよびハイエンドのサーバーコンピュータであれば、これの10倍またはそれ以上の速度を達成することが予想されうる。
【0112】
こうして、物品から生成されるシグネチャが知られている物品のデータベース内にすでに格納されているかどうかを検証する方法について説明された。
【0113】
多くの変更形態が可能であることは理解されるであろう。例えば、相互相関係数を事前選別コンポーネントとして処理する代わりに、これらは、主シグネチャの一部として2値化された強度データといっしょに処理することが可能である。例えば、相互相関係数を2値化し、2値化された強度データに加えることが可能である。相互相関係数は、さらに、単独で2値化され、ヒットを見つけるために2値化された強度データのサムネイルについて上述と同じ方法で検索することが可能なビット列などを生成するために使用できる。
【0114】
そこで、マッチの信頼度結果を得るために検査シグネチャと記録シグネチャとを比較するための多数のオプションについて説明された。
【0115】
図17は、検証を目的として文書をスキャンする全体的プロセスおよびユーザーに提示される結果を示す流れ図である。最初に、文書を図8のスキャンステップに従ってスキャンする。次いで、文書の真贋を図15の検証ステップを使用して検証する。データベース内にマッチするレコードがない場合、「非マッチ」結果をユーザーに対して表示することができる。マッチがある場合、これは、好適なユーザーインターフェイスを使用してユーザーに対して表示されうる。ユーザーインターフェイスは、異なる結果についてオンオフするか、または一方の色から他方の色に変わるランプまたはLEDなどの単純な「yes/no」型インジケータシステムとすることができる。ユーザーインターフェイスは、クレジットカードの従来の検証に使用されうるような、販売時点型検証レポートインターフェイスの形態を取ることもできる。ユーザーインターフェイスは、結果内の確度およびオリジナルの物品またはその物品の所有者を記述しているデータなどの、結果のさまざまな詳細を与える詳細インターフェイスとすることも可能である。このようなインターフェイスは、システムアドミニストレータまたは実装者がシステムの動作状態に関するフィードバックを返すために使用することが可能である。このようなインターフェイスは、従来のコンピュータ端末で使用するソフトウェアパッケージの一部として備えることも可能である。
【0116】
したがって、データベースのマッチが見つかったときに、ユーザーが自分の常識を検証の追加の情報層に対して適用することを可能にすることもできる直観的で、アクセス可能な形式でユーザーに関連する情報を提示することができることは理解されるであろう。例えば、物品が文書である場合、ユーザーインターフェイス上に表示される文書の画像は、検証者に提示される文書と似ているべきであり、文書の作成元に関係する信頼度レベルおよび書誌データなどの他のファクタも興味がある。検証者は、自分の経験を適用して、それらのさまざまな情報断片に自己矛盾がないかどうかに関する価値判断を下すことができる。
【0117】
その一方で、スキャン検証オペレーションの出力を、人間のオペレータではなく何らかの形態の自動制御システムに供給することができる。そこで、自動制御システムは、検証(または非検証)シグネチャの取り出し元の物品に関係するオペレーションにおいて使用するために利用可能な出力結果を有する。
【0118】
レーザー関連システムに関して発明者の以前の研究から発見されたように、物品の表面上への光の集光は、上品質のデータを得られるという観点から重要である。上品質のデータから信頼できると共に再生可能なシグネチャが生成される。
【0119】
図18は、結果として生じるシグネチャに関する焦点精度の効果を例示する図である。図18から分かるように、開口幅(集光された光線形状を定義する有効口径(effective aperture)、図4に示されている物理的な開口または集束レンズによってつくられる有効口径)が大きくなるにつれ、自己相関幅(autocorrelation width)(すなわち、シグネチャから結果として生じるピークの半値全幅がそれ自体に対して相互相関していること)が大きくなる。これは、光検出器から受け取った信号がより少ない情報を含むことを示す。情報は、特徴を決定するようになるとき、シグネチャにおける有効なビットの数が低減されることを意味する。また、開口幅が増加するにつれて、それが変化する間に、光検出器によって受け取られる信号における微小な強度変化を示すdI/I測定値(ある意味では、これは、受信信号の「強さ」である)は減少する。これは、ターゲットの表層構造により生成される受け取った信号が弱っていることを意味する。
【0120】
異なる照明技術の実行が、図19A〜図19Dに図示されている。各図は、同じ物品の同じ領域の2つの連続的なスキャンのそれぞれに対して表示されている。物品は、粉ガラス(ground glass)の5mmの長さスキャン領域であった。粉ガラスは、RMS表面粗さの1.8μm高さを有する。2つのスキャンがほぼ同一のデータを返す所で、各図における2つのプロット線間の差は、殆ど目立たない。
【0121】
図19Aは、照明が図2に関して説明したLEDアレイのような構造化LED光源からである場合の結果を示す。
【0122】
図19Bは、比較のため、照明が円柱状レンズによる細長い焦点に集光された平行化レーザー光源からである場合の結果を示す。
【0123】
図19Cは、光源が例えばフィラメント灯の熱光源である図3に関して説明したような構造化された開口配置構成からの結果を示す。
【0124】
図19Dは、光源がLEDである図3に関して説明したような構造化された開口配置構成から得られた結果を示す。
【0125】
すべてのケースで分かるように、2つのスキャンの間の相関関係は、非常に良好であり、構造化光源及び非構造化光源の両方において、再現性の高水準が達成可能である。
【0126】
図19が異なる光源タイプのためのシグネチャ生成の再現性を例示する図である。重要なポイントは、物品はその能力に基づいて確認されるかまたは認証され、複数の異なる場合に分析されるときに、又は問い合わせられるときに実質的に同じシグネチャが生成する。他の重要な考慮は、信号の強さである。信号の強さ、すなわち反射または読取り体積からの屈折の強度から、シグネチャが発生される。これは、図20に図示されている。図20において、構造化LED光源又はレーザー光源から反射の強度が、比較されている。図20における2本のプロット線は、ほぼ紙基材の同じ一部の30mmのスキャンのためであり、そのため、ピークの位置との相対的なピークのサイズとの僅かな差は、2つの光源の性能を比較する際に重要でない。しかし、図23から読み込まれ得ることは、LED光源のトレースのための微細なピークがレーザー光源トレースのそれらより相対的に小さいという点で構造化LED光源からの反射の相対的な強度がレーザー光源からの反射の相対的な強度より僅かに小さい。このように、レーザー光源がLED光源より高い振幅を有する微細な表層構造を読取ることが分かる。
【0127】
図21は、生成されたシグネチャの抵抗と同じ対象の異なるスキャンのためターゲット表面に対するスキャナの位置決めのオフセットとの比較を示す。図21に示されているように、同じ物品の異なるスキャン間の相互相関ビットマッチ比率の減少は、レーザー光源により僅かに速い構造化された光源に対するスキャンの間に横方向の平行(transverse translational)のミス位置決めと共に落ちる。
【0128】
レーザー光源が用いられた場合の性能と、非コヒーレント光源を用いた場合の性能との比較が図22に示されている。このグラフは、様々な基板に対してレーザー光源に基づくスキャナーと、構造化非コヒーレント光源に基づくスキャナーとを用いた同じ基板に対する異なるスキャンを比較したときに得られたビットマッチ比(Bit Match Ratio)を示す。結果は、(例えば、エイブリー・デニスン社により生産されたような)紙印刷ラベルのターゲット基板と測定表層粗さの表面120Grit(test target Thor Labs DG100X100−120 ground glass diffuser)及び測定表層粗さの表面220Grit(test target Thor Labs DX100X100−220 ground glass diffuser)とに対する周知マッチの結果の強さを示す。
【0129】
このグラフは、より大きい表層テクスチャ・サイズ(紙、粒径〉約100μm)に対して非コヒーレント光源の性能がレーザー光源の性能と同等であるが、非コヒーレント光源の性能がレーザー光源の性能はより少ない表層テクスチャ・サイズに対しては低下され得ることを示す。
【0130】
したがって、ターゲット基板から再生可能なシグネチャをつくるために、ターゲット基板をスキャンするための非コヒーレント光源を使用することが様々な状況に対する現実的なオプションであることは明らかである。このタイプの非レーザーシステムの実施における3つの問題がある。これらは、必要な焦点を得る能力と、その焦点での反射における必要な強度を得る能力と、特定の条件で非レーザー光にと共にレーザー散乱の光学特性が機能するかということとである。上記から分かるように、焦点は得られることができ、充分な強度は得られることが可能である。そして、レーザー散乱効果は、システムが機能し、有用で再生可能なデータを提供するのに十分によく発生する。
【0131】
そこで、レーザー光源を用いずに、物品をスキャンしてそこからシグネチャを形成する方法およびそのスキャン結果を物品の以前の記録シグネチャと比較してスキャンされた物品が記録シグネチャの取り出し元である物品と同じであるかどうかを判定する方法について説明されている。これらの方法は、物品が非常に高い精度で記録スキャンがなされた物品とマッチするかどうかの判定を行うものとしてよい。
【0132】
そこで、一観点から、紙、段ボール、プラスチック、金属、または他の物品上で集光非コヒーレント光線をスキャンし、その散乱を測定することによって得られるデータ点の集合を2値化することによってデジタルシグネチャが得られるシステムの要約が説明された。サムネイルデジタルシグネチャも、データの平均または圧縮処理によって実空間において、またはデータ点の集合のフーリエ変換の振幅スペクトルを2値化することによって決定される。こうして、デジタルシグネチャおよびそのサムネイルのデータベースを構築することができる。物品の真贋は、後から、物品を再スキャンしてそのデジタルシグネチャおよびサムネイルを判定し、次いで、データベース内のマッチを検索することによって検証することができる。サムネイルに基づいて検索を実行し、検索速度を改善する。フーリエ変換ベースのサムネイルを使用することで、速度を改善することができるが、それは、疑似ランダムビット列において、ビットシフトは、極座標で表されるフーリエ変換の位相スペクトルにのみ影響を及ぼし、振幅スペクトルには影響を及ぼさないからである。したがって、オリジナルのスキャンと再スキャンとの間のレジストリ誤差によって引き起こされる未知のビットシフトを知ることなく、サムネイルに格納される振幅スペクトルのマッチングを行うことができる。
【0133】
いくつかの例では、スキャンされた物品からシグネチャを抽出する方法は、例えば、引き伸ばしまたは縮みにより物品に変形が生じたとしても物品を確実に認識するように最適化することができる。物品のこのような引き伸ばしまたは縮みは、例えば、水害により、紙またはボール紙を使用した物品に生じうる。
【0134】
さらに、物品は、スキャナ内のセンサに対する物品の相対速度が非線形である場合に、スキャナからは、引き伸ばされたり、または縮んだりするように見えることがある。これは、例えば、物品が、コンベヤシステムに載って移動している場合、または物品が、物品を保持している人の手でスキャナに通される場合に発生しうる。このようなことがあり得そうなシナリオの一例として、人が、例えば、スワイプ式スキャナを使用して銀行カードをスキャンする場合が挙げられる。
【0135】
いくつかの例では、スキャナがスキャナに対しまたはスキャナ内で静止状態に保たれている物品に相対的にスキャナユニット内で移動するスキャンヘッドに基づく場合、スキャンヘッドの非線形な移動に対処するためスキャナ内で線形化誘導を行うことができる。物品が、人の手で動かされる場合、これらの非線形性は、大きく悪化しうる。
【0136】
これらの非線形効果により引き起こされうる認識問題を解消するために、物品のスキャンの分析段階を調節することが可能である。そこで、修正された検証手順について、図23aを参照しつつ説明することにする。この例で実装されるプロセスでは、非線形性に対処するためにデータのブロック毎分析を使用する。
【0137】
図23aに従って実行されるプロセスは、時間領域フィルター処理するステップ、代替的または追加の線形化を行うステップ、遷移の上限を定めるステップ、空間領域フィルター処理を行うステップ、データを平滑化し微分するステップ、および図8を参照しつつ説明されている署名およびサムネイルを取得するためにデジタイズするステップの一部または全部を含むことができるが、図23aでは、図の内容がわかりにくくならないようにするため、示されていない。
【0138】
図23aに示されているように、ブロック毎分析を使用する検証スキャンのスキャンプロセスは、物品のスキャンを実行して物品の固有の特性を記述するデータを取得することによりステップS21から始まる。このスキャンされたデータは、次いで、ステップS22で、連続する複数のブロックに分割される(デジタイズおよび平滑化/微分などの前または後に実行できる)。一実施例では、1600mm2(例えば、40mm×40mm)のスキャン面積は、8つの等しい長さのブロックに分割される。したがって、それぞれのブロックは、スキャンされた物品のスキャンされた領域の部分セクションとなる。
【0139】
ブロックのそれぞれについて、ステップS23で物品が比較されることが意図されている格納されたそれぞれのシグネチャに対し等価なブロックと突き合わせて相互相関が実行される。これは、ブロック毎に1つのサムネイルを使うサムネイルアプローチを使用して実行できる。次いで、これらの相互相関の計算結果を分析して、相互相関ピークの配置を弁別する。次いで、物品のオリジナルのスキャンと後からのスキャンとの間に完全に線形な関係があった場合に、ステップS24で相互相関ピークの配置がピークの予想配置と比較される。
【0140】
このブロックマッチング技術は、比較的計算量の多いプロセスであるため、いくつかの例では、その使用は、ブロック毎の分析がサムネイル検索によって弁別される潜在的シグネチャマッチのショートリストにのみ適用されるようにサムネイル検索との併用に制限されうる。
【0141】
この関係は、図24A、24B、および24Cに示すようにグラフで表すことができる。図24Aの例では、相互相関ピークは、ちょうど予想された位置にあり、物品に相対的なスキャンヘッドの移動は、完全に線形であり、物品に伸びまたは縮みは生じていない。したがって、予想されるピークに対する実際のピーク位置のプロットを描くと、原点を通り、勾配が1の直線が得られる。
【0142】
図24Bの例では、相互相関ピーク同士は、予想以上に近い位置にあり、最良適合の直線の勾配は1未満となる。そのため、物品は、初期スキャンの後の物理的特性に相対的に縮んでしまっている。また、最良適合直線は、プロットの原点を通らない。そこで、物品は、記録スキャンに対するその位置と比較してスキャンヘッドに相対的にシフトされる。
【0143】
図24Cの実施例では、相互相関ピークは、直線をなさない。この実施例では、これらのピークは、y2関数を表す曲線に近似的に当てはめられる。そのため、スキャンヘッドに相対的な物品の移動は、スキャン時に遅くなってしまっている。また、最良適合曲線は、原点を横切らないので、物品は、記録スキャンについてその位置に相対的にシフトされる。
【0144】
さまざまな関数を相互相関ピークの点のプロットにテストフィットして、最良適合関数を見つけることができる。したがって、伸び、縮み、ミスアライメント、加速、減速、およびそれらの組み合わせを記述する曲線を使用できる。好適な関数の例として、直線関数、指数関数、三角関数、χ2関数、およびχ3関数が挙げられる。
【0145】
ステップS25で最良適合関数が弁別された後、ステップS26においてそれぞれの相互相関ピークが予想位置からどれだけシフトされるかを表す一組の変化パラメータを決定することができる。次いで、スキャンから得られるデータに対する縮み、伸び、ミスアライメント、加速、または減速の影響を実質的に逆転するために、ステップS27において、これらの補正パラメータをステップS21で実行したスキャンから得られるデータに適用することができる。以下で理解されるように、ステップS25で求められた最良適合関数のスキャンデータへの当てはめ精度が高いほど、補正効果は高い。
【0146】
次いで、補正されたスキャンデータは、ステップS22と同様にステップS28で連続するブロックに分割される。次いで、これらのブロックと、ステップS29で格納されているシグネチャから得られるデータのそれぞれのブロックとの相互相関を求めて、相互相関係数を得る。このときに、ステップS29で、相互相関ピークの大きさを分析し、一意性係数を決定する。したがって、スキャンされた物品は、格納されているシグネチャが作成されたときにスキャンされた物品と同じであるかどうかが判定できる。
【0147】
したがって、スキャンされた物品の物理的変形、および/またはスキャナに相対的な物品の移動における非線形性を補正する方法の一実施例について説明された。この方法を使用することで、スキャンされた物品は、物品の前のスキャンから得られたその物品に対する格納されているシグネチャと突き合わせてチェックされ、これにより、同じ物品が後からのスキャンに存在しているかどうかを高い確度レベルで判定することができる。これにより、歪みやすい材料で作られた物品を確実に認識することができる。また、物品に相対的なスキャナの移動が非線形になりうるスキャナを使用することができ、これにより、移動制御要素を使用することなく安価なスキャナを使用することができる。
【0148】
スキャンデータのブロック毎の分析を実行するための代替的方法が図23bに提示されている。
【0149】
この方法は、ステップS21から始まり、図23aのステップS21を参照しつつ上で説明されているようにターゲット表面のスキャンを実行する。データが取り込まれた後、ステップS31でこのスキャンデータを所定の数のビットにキャストする。これは、スキャンデータのビットの数をキャスト長とマッチするように効果的に減らす段階からなる。本発明の例では、キャストデータを構成するためにスキャンデータの均等な間隔で並ぶビットを取ることによってスキャンデータをキャスト長に適用する。
【0150】
次に、ステップS33で、キャストデータの隣接するビット間の相関が十分に高いレベルであることを確認するチェックを実行する。実際、隣接するビットの間に約50%の相関があれば十分であることがわかっている。ビットが閾値の条件を満たしていないとわかった場合、スキャンデータをキャストするフィルターを調節し、キャストデータ内でビットの異なる組み合わせを構成する。
【0151】
キャストデータの隣接するビットの間の相関が十分に高いと判定された後、ステップS35で、キャストデータを格納されている記録シグネチャと比較する。これは、記録シグネチャのそれぞれの所定のブロックを取り、それをキャストデータと比較することによって実行される。本発明の例では、キャストデータと記録シグネチャに対する同等の縮小データセットとの間の比較を行う。記録シグネチャのそれぞれのブロックは、キャストデータのすべてのビット位置オフセットと突き合わせて検査され、そのブロックに対する最良マッチの位置が、最高の相互相関値を返すビットオフセット位置となる。
【0152】
記録シグネチャのすべてのブロックがキャストデータと比較された後、ブロックのそれぞれに対する最高の相互相関値としてその記録シグネチャについてマッチ結果(ビットマッチ比)を出力することができる。さらなる候補記録シグネチャを、必要ならばキャストデータと比較することができる(いくつかの例では検査が1:1検査であるか、1:多検査であるかに応じて)。
【0153】
比較ステップが完了した後、ステップS37で、オプションのマッチング規則を適用することができる。これらは、与えられた記録シグネチャに対するビットマッチ比を出力するときに記録シグネチャのさまざまなブロックを強制的に正しい順序にする段階を含むものとしてよい。例えば、記録シグネチャが5つのブロック(ブロック1、ブロック2、ブロック3、ブロック4、およびブロック5)に分割されるが、これらのブロックに対する最良の相互相関値が、キャストデータに対して検査したときに、異なる順序でブロックを返した場合(例えば、ブロック2、ブロック3、ブロック4、ブロック1、ブロック5)、この結果は棄却され、ブロックを正しい順序に保つ最良の相互相関結果を使用して新規の合計値を計算することが可能である。このステップは、実行される実験において、このタイプの規則が最終結果にもしあったとしてもほとんど相違を生じないことがわかっているためオプションである。これは、短いブロックの長さにわたって表面弁別特性が適切に作用し、間違った順序のマッチが出現して偽陽性が生じる可能性が統計的に極端に低いことによるものと信じられている。
【0154】
最後に、ステップS39で、ビットマッチ比を使用することにより、ステップS35で判定された相互相関ピークの位置に基づきスキャンデータについて記録シグネチャのブロックをシフトすることを含めて、スキャンデータの全体を記録シグネチャの全体と比較することによって一意性が判定されうる。このときに、ステップS39で、相互相関ピークの大きさを分析し、一意性係数を決定する。したがって、スキャンされた物品は、格納されている記録シグネチャが作成されたときにスキャンされた物品と同じであるかどうかが判定できる。
【0155】
この方法で使用されるブロックサイズは、効率的なマッチングおよびマッチングの高信頼性をもたらすように予め決定されうる。スキャンデータセットと記録シグネチャとの間の相互相関を実行するときに、マッチ結果が約0.9のビットマッチ比を有することが予想される。1.0のマッチ比は、スキャンによって測定される表面の特性のバイオメトリックタイプの性質により期待されない。非マッチが約0.5のビットマッチ比を有することも予想される。完全なシグネチャより少ないビットを含むときにブロックの性質は、非マッチ結果のありえそうな値をシフトする傾向を有し、そのため、偽陽性を見つける確率が高まる。例えば、実験によって、32ビットのブロック長により非マッチが約0.75に移動することがわかっているが、これは多くの用途において高すぎ、約0.9で陽性のマッチに近すぎる。64ビットのブロック長を使用すると、非マッチ結果は約0.68まで下がり、ここでもまた、用途によっては高すぎる場合がある。ブロックサイズを96ビットにさらに増やすと、非マッチ結果は約0.6まで下がり、大半の用途では、真陽性結果と偽陽性結果との間に十分以上の隔たりをもたらす。上記の説明から明らかなように、マッチのピークと非マッチのピークとの間の隔たりがブロック長の関数となっているので、ブロック長を増やすと非マッチ結果とマッチ結果との間の隔たりが増す。したがって、1ブロック当たりのビット数を増やすことにより引き起こされる処理の複雑さが増すことと引き換えに、ブロック長をピークの隔たりの増大(識別精度の高まり)に関して増やすことができることは明らかである。その一方で、真陽性結果と偽陽性結果との間の隔たりの小ささが許容可能であれば、ブロック長は、処理の複雑度を下げるために短くすることもできる。
【0156】
光検出器によって集められたデータの個別の部分集合に対する一意性の尺度を構成し、データを組み合わせるのではなくそれらの個別の一意性の値を組み合わせ、次いで全体的な一意性を計算することも可能である。例えば、いくつかの例では、データは処理のためブロックの集合に分けられ、それぞれのブロックはそのために計算されたBMRを有することができる。これは、一意性の尺度がブロック毎に構成されるようにさらに1ステップ進めることができる。同様に、個別の光検出器からのデータを分析して、それに対する一意性を生み出すことができる。
【0157】
このようなアプローチを取ることによって、全体的な一意性に関する追加の情報は明白なものとなりうる。例えば、データが10個のブロックに分割され、それらのブロックのうちの3つのブロックが非常に強い一意性をもたらし、残り7個のブロックがそれより弱いか、または存在しない一意性を返す場合、これは、10個のブロックすべてが控えめな一意性を持つかのように同じ全体的な一意性をもたらす可能性がある。したがって、物品の改ざん、物品の損傷、センサの不具合、および多数の他の状態を検出することができる。
【0158】
したがって、このようなアプローチは、個別のブロックおよび/または光検出器の一意性を組み合わせて全体的な一意性を構成することを伴う。これは、値を組み合わせる直截的な方法であるものとしてよいか、またはいくつかの状況では、重み付けを適用して、いくつかの値の寄与を他の値の寄与に対して勝るように強調することができる。対数目盛で表される一意性を組み合わせるために、個別の一意性を総和し(例えば、3つのブロックのうちそれぞれが1020の一意性を有し、全体的な一意性は1060となる)、対数目盛が使用されない場合には値を増やす。
【0159】
その物品の固有の特性に基づいて生成されたシグネチャのブロック毎分析を使用して検出することができる物品の他の特性は、その物品に局在する損傷の特性である。例えば、そのような技術を使用して、初期記録スキャンの後に行われる物品に対する修正を検出することができる。
【0160】
例えば、パスポート、IDカード、および運転免許証などの文書の多くは、携帯者の写真を含む。このような物品の真贋判定スキャンが写真の一部を含む場合、その写真に加えられた変更が、検出されることになる。ここで署名を10個のブロックに分割する任意の例を取りあげると、それらのブロックのうち3つは、文書上の写真を覆い、他の7つは、背景資料などの文書の他の部分を覆いうる。写真が置き換えられた場合、文書のその後の再スキャンでは、修正が行われていない7つのブロックに対する十分な一致が得られると予想することができるが、置き換えられた写真では、一致度は非常に悪いものとなる。それら3つのブロックが写真に対応することを知ることにより、3つすべてが非常に悪い一致度をもたらすという事実を利用し、シグネチャ全体に対する平均スコアに関係なく、文書の検証を自動的に失敗させることができる。
【0161】
また、多くの文書は、1人またはそれ以上の人々の書かれた指示、例えば、パスポート、運転免許証、またはIDカードに記載されている人の名前、または銀行口座保有者の名前を含む。多くの文書は、さらに、携帯者または証明者のシグネチャが記載される場所をも含む。検証のためそこから得られるシグネチャのブロック毎分析を使用することで、文書上に印刷または書かれた名前または他の重要な単語もしくは番号を改ざんする修正を検出することができる。改ざんされた印刷または手書きの位置に対応するブロックは、修正が行われていないブロックに比べて品質のかなり低い一致をもたらすと予想できる。そこで、修正された名前または書かれたシグネチャが検出され、文書の全体的一致度が合格結果を得られるほど十分に高い場合でも、文書は検証試験に失敗する可能性がある。
【0162】
スキャン領域に対し選択された領域および要素は、詐欺師が改ざんを試みる可能性が最も高い文書の要素を含む、多数の要因に依存しうる。例えば、写真を含む文書の場合、改ざんの最も可能性の高いターゲットは、通常、これが視覚的に携帯者を識別するような写真である。したがって、そのような文書に対するスキャン領域は、写真の一部を含むように選択されると都合がよい。不正修正を受ける可能性のある他の要素は、携帯者のシグネチャであるが、それは、人が自分以外の人の名前を名のるのは容易であるが、他の人のシグネチャを複製することは比較的難しいからである。したがって、シグネチャ入り文書、特に写真を含まないものの場合、スキャン領域は文書上のシグネチャの一部を含んでいると都合がよい。
【0163】
したがって、一般的な場合において、物品の真贋検査は、署名全体に対し検証シグネチャと記録シグネチャとの十分に品質の高い一致、シグネチャの少なくとも選択されたブロックにわたる十分に高い一致についての検査を含むことができることがわかる。したがって、物品の真贋を評価することに対し重要な領域は、肯定的な真贋判定結果を得るのに重要であるものとして選択することができる。
【0164】
いくつかの実施例において、クリティカルブロックとして選択されたブロック以外のブロックは、悪い一致度の結果を与えることが許される可能性がある。したがって、文書は、クリティカルブロックがよい一致度を有し、シグネチャが全体としてよい一致度を示す限り、破れたり、他の何らかの形で一部が破損しているにも関わらず本物であると認めることができる。
【0165】
そこで、物品の局所的損傷を識別し、その所定の領域内に局所的な損傷または改ざんがある本物でない物品を除去するためのシステム、方法、および装置の多くの実施例が説明された。他の領域内の損傷または改ざんについては、無視することができ、これにより、文書を本物として認識することができる。
【0166】
スキャナ装置によっては、スキャンされた領域の始まりの位置と終わりの位置を決定することが困難な場合もある。上述の例のうち、これは、スキャナが物品のスキャン領域以上の領域を「見る」ことができる処理ライン型システムにおいて最も問題となる可能性がある。この問題を解決する一アプローチでは、スキャン領域を物品の縁から始まるものとして定義する。スキャンヘッドで受け取ったデータは、物品が以前に空き領域と呼ばれていたところに通されるときに明確な段階的変化を受けるので、スキャンヘッドで取り出されたデータは、スキャンが始まる場所を判定するために使用できる。
【0167】
この例では、スキャンヘッドは、物品をスキャナに置く前に稼働状態にある。したがって、最初に、スキャンヘッドは、スキャンヘッドの前にある未占有空間に対応するデータを受け取る。物品がスキャンヘッドの前に通されると、スキャンヘッドにより受け取られたデータは、即座に、変化し、物品を記述するデータとなる。そのため、データを監視して物品の先頭を判定し、それよりも前にあるすべてのデータを無視することができる。物品前縁に相対的なスキャン領域の位置および長さは、さまざまな方法で決定することができる。最も単純なのは、スキャン領域を物品の全長とすることであり、これにより、スキャンヘッドで再び空き領域に対応するデータをピックアップすることで終わりを検出できる。他の方法では、前縁から所定のスキャン読取り回数だけ記録されたデータの開始および/停止を行う。物品は、常に、ほぼ同じ速度でスキャンヘッドを通過すると仮定すると、この結果、一貫したスキャン領域が得られる。他の代替的方法では、物品上の実際のマークを使用してスキャン領域の始まりおよび終わりを決めるが、これの方法は、取り込まれたどのデータがスキャン領域に対応しており、どのデータを無視できるかを決定するために、データ処理に関してさらに多くの作業を必要とする可能性がある。
【0168】
いくつかの例では、処理ラインの駆動モーターに、ロータリーエンコーダを装着し、物品の速度を定めることができる。あるいは、何らかの形態のリニアエンコーダをラインの移動表面に関して使用することができる。これを使用して、物品の検出された前縁に関してスキャンの開始および停止位置を決定することができる。これを使用すると、図8を参照しつつ上で説明されているように、データの線形化に関する速度情報が得られる。速度は、エンコーダから定期的に決定されることができ、これにより、速度を、1日に1回、1時間に1回、半時間に1回などの間隔でチェックする。
【0169】
いくつかの例では、処理ラインの速度は、センサから出力されたデータを分析することで判定されうる。物品のサイズをあらかじめ知っておき、物品がスキャナを通る際の時間を測定することによって、平均速度を決定することができる。この計算した速度を使用し、図8を参照しつつ上で説明されているように、前縁に関してスキャン領域を特定し、データを線形化することができる。
【0170】
このタイプの状況に対処するための他の方法は、物品上のマーカーもしくはテクスチャの特徴を使用してスキャン領域の開始および/または終了を示す方法である。これは、例えば、上述のパターンマッチング技術を使用して弁別することが可能である。
【0171】
そこで、アイテムをスキャンし物品の固有の特性に基づいてデータを集める技術、必要ならばスキャンプロセスにおける物品の損傷または非線形性を補正する技術、および物品の前のスキャンに基づいて物品を格納されているシグネチャと比較して両方のスキャンに対し同じ物品が存在しているかどうかを判定する技術が多数説明された。
【0172】
シグネチャ生成に対するさらなるオプションの配置構成について説明する。この例の技術は、光検出器16からの反射信号の抽出に対し微分アプローチを使用するものである(図1に例示されているように)。このアプローチでは、光検出器は、対として取り扱われる。したがって、2つよりも多い光検出器が使用される場合、微分アプローチのためにいくつかを対として含め、いくつかを個別に、または総和をとる形で考慮することができる。この例の残り部分は、2つの光検出器16aおよび16bが使用される状況に関するものである。
【0173】
本発明の例では、それぞれの光検出器16からの出力が別個のADC 31に供給される。次いで、これら2つのADCの出力を微分し(例えば、この場合、第2の光検出器からの2値化された信号を第1の光検出器からの2値化された信号から差し引く)、シグネチャ生成に使用されるデータセットを構成する。
【0174】
この技術は、微分がその後信号強度を倍増するに至るまでの効果を有するので、2つの光検出器からの出力が実質的に自己相関している状況に特に適用可能である。高レベルの自己相関が生じる状況の例として、高レベルのハーフトーン印刷がなされている表面が挙げられる。
【0175】
こうして、物品からバイオメトリックタイプのシグネチャを取得して使用するための様々なシステムが説明された。代替的スキャナ配置構成、およびそのようなシステムのさまざまな用途および使用については、上記のさまざまな特許出願に記載されている。本明細書で開示されているマッチ結果検査アプローチを物理的スキャナ配置構成および/または他の特許出願において開示されているそのような技術の用途および使用とともに使用することは、発明者が企図している。
【符号の説明】
【0176】
1 光学式読取り装置
10 読取り開口
12 筐体
14 レーザー光源、レーザー発生器
15 コヒーレントレーザー光線
16 検出器配置構成
16a、16b 光検出器要素
18 集束配置構成
20 サブアセンブリ
22 モーター
31 アナログ/デジタルコンバータ(ADC)
36 制御およびシグネチャ生成ユニット
50 スキャン領域
51、52、53、54、55、56 領域
【特許請求の範囲】
【請求項1】
集束された非コヒーレント光線を生成して順次に読取り体積内の複数の異なる領域の各々上に導くように動作可能な発生器と、
前記光線が前記読取り体積内の異なる領域から散乱するときに得られた信号から一群のデータ点からなるセットを集めるように動作可能な検出器配列構成であって異なる前記一群のデータ点が前記読取り体積内のそれぞれの異なる領域からの散乱に関連する検出器装置と、
前記一群のデータ点のセットから物品のシグネチャを決定するように動作可能なデータ収集および処理モジュールと、
を備える、読取り体積内に配列される物品からシグネチャを決定する装置。
【請求項2】
前記発生器が構造化光源を備える、請求項1に記載の装置。
【請求項3】
前記構造化光源がLEDアレイである、請求項2に記載の装置。
【請求項4】
前記発生器が非構造化光源を備える、請求項1に記載の装置。
【請求項5】
前記非構造化光源が熱光源である、請求項4に記載の装置。
【請求項6】
前記発生器は、前記光線を集光させて前記読取り体積内に細長い焦点を得るように動作可能である、請求項1〜5の何れか一項に記載の装置。
【請求項7】
前記細長い焦点の短い寸法が100μm未満である、請求項6に記載の装置。
【請求項8】
前記細長い焦点の短い寸法が50μm未満である、請求項6に記載の装置。
【請求項9】
前記細長い焦点の長い寸法が3mm〜50mmの範囲内である、請求項6〜8の何れか一項に記載の装置。
【請求項10】
前記発生器は、前記非コヒーレント光線を平行化して該平行化された光線を集光させるための配置構成を備える、請求項1〜9の何れか一項に記載の装置。
【請求項11】
集光された非コヒーレント光線を読取り体積内の複数の異なる領域の各々上に順次に導くステップと、
前記光線が前記読取り体積内の異なる領域から散乱するときに得られた信号からデータ点の群からなるセットを集めるステップであって該データ点の群の異なるものが前記読取り体積内のそれぞれの異なる領域からの散乱に関するステップと、
前記データ点の群のセットから前記物品のシグネチャを決定するステップと、
を備える読取り体積内に配置される物品からシグネチャを決定する方法。
【請求項12】
前記非コヒーレント光線が構造化光源からのものである、請求項11に記載の方法。
【請求項13】
前記光線がLEDアレイからのものである、請求項12に記載の方法。
【請求項14】
前記非コヒーレント光線が非構造化光源からのものある、請求項11に記載の方法。
【請求項15】
前記コヒーレント光線が熱光源からのものある、請求項14に記載の方法。
【請求項16】
前記光線を集光させて前記読取り体積内に細長い焦点を得るステップを更に備える、請求項11〜14の何れか一項に記載の方法。
【請求項17】
前記細長い焦点の短い寸法が100μm未満である、請求項16に記載の方法。
【請求項18】
前記細長い焦点の短い寸法が50μm未満である、請求項16に記載の方法。
【請求項19】
前記細長い焦点の長い寸法が3mm〜50mmの範囲内にある、請求項16〜18の何れか一項に記載の方法。
【請求項20】
前記非コヒーレント光線を平行化して該平行化された光線を集光させるステップを更に含む、請求項11〜19の何れか一項に記載の方法。
【請求項21】
実質的に請求項1〜9の何れか一項に記載の装置。
【請求項22】
実質的に請求項11〜20の何れか一項に記載の方法。
【請求項1】
集束された非コヒーレント光線を生成して順次に読取り体積内の複数の異なる領域の各々上に導くように動作可能な発生器と、
前記光線が前記読取り体積内の異なる領域から散乱するときに得られた信号から一群のデータ点からなるセットを集めるように動作可能な検出器配列構成であって異なる前記一群のデータ点が前記読取り体積内のそれぞれの異なる領域からの散乱に関連する検出器装置と、
前記一群のデータ点のセットから物品のシグネチャを決定するように動作可能なデータ収集および処理モジュールと、
を備える、読取り体積内に配列される物品からシグネチャを決定する装置。
【請求項2】
前記発生器が構造化光源を備える、請求項1に記載の装置。
【請求項3】
前記構造化光源がLEDアレイである、請求項2に記載の装置。
【請求項4】
前記発生器が非構造化光源を備える、請求項1に記載の装置。
【請求項5】
前記非構造化光源が熱光源である、請求項4に記載の装置。
【請求項6】
前記発生器は、前記光線を集光させて前記読取り体積内に細長い焦点を得るように動作可能である、請求項1〜5の何れか一項に記載の装置。
【請求項7】
前記細長い焦点の短い寸法が100μm未満である、請求項6に記載の装置。
【請求項8】
前記細長い焦点の短い寸法が50μm未満である、請求項6に記載の装置。
【請求項9】
前記細長い焦点の長い寸法が3mm〜50mmの範囲内である、請求項6〜8の何れか一項に記載の装置。
【請求項10】
前記発生器は、前記非コヒーレント光線を平行化して該平行化された光線を集光させるための配置構成を備える、請求項1〜9の何れか一項に記載の装置。
【請求項11】
集光された非コヒーレント光線を読取り体積内の複数の異なる領域の各々上に順次に導くステップと、
前記光線が前記読取り体積内の異なる領域から散乱するときに得られた信号からデータ点の群からなるセットを集めるステップであって該データ点の群の異なるものが前記読取り体積内のそれぞれの異なる領域からの散乱に関するステップと、
前記データ点の群のセットから前記物品のシグネチャを決定するステップと、
を備える読取り体積内に配置される物品からシグネチャを決定する方法。
【請求項12】
前記非コヒーレント光線が構造化光源からのものである、請求項11に記載の方法。
【請求項13】
前記光線がLEDアレイからのものである、請求項12に記載の方法。
【請求項14】
前記非コヒーレント光線が非構造化光源からのものある、請求項11に記載の方法。
【請求項15】
前記コヒーレント光線が熱光源からのものある、請求項14に記載の方法。
【請求項16】
前記光線を集光させて前記読取り体積内に細長い焦点を得るステップを更に備える、請求項11〜14の何れか一項に記載の方法。
【請求項17】
前記細長い焦点の短い寸法が100μm未満である、請求項16に記載の方法。
【請求項18】
前記細長い焦点の短い寸法が50μm未満である、請求項16に記載の方法。
【請求項19】
前記細長い焦点の長い寸法が3mm〜50mmの範囲内にある、請求項16〜18の何れか一項に記載の方法。
【請求項20】
前記非コヒーレント光線を平行化して該平行化された光線を集光させるステップを更に含む、請求項11〜19の何れか一項に記載の方法。
【請求項21】
実質的に請求項1〜9の何れか一項に記載の装置。
【請求項22】
実質的に請求項11〜20の何れか一項に記載の方法。
【図1】

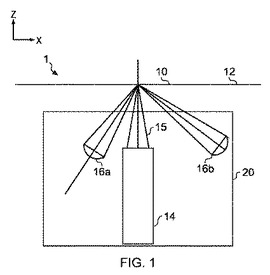
【図2】
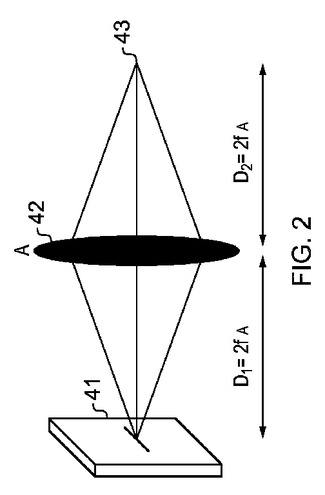
【図3】
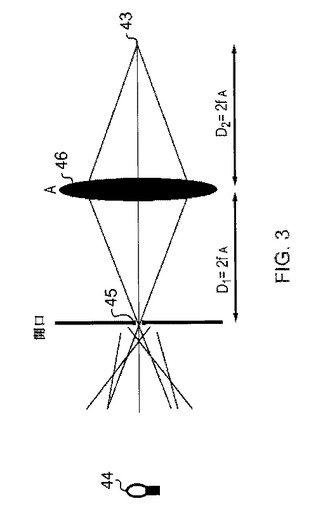
【図4】
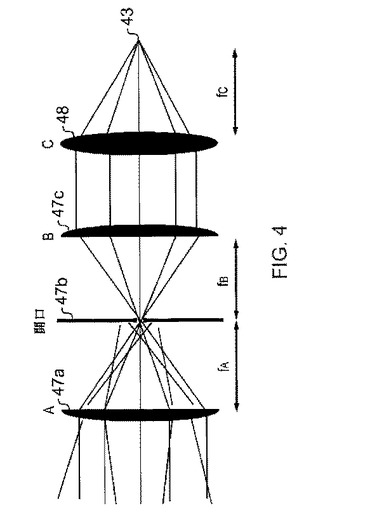
【図5】
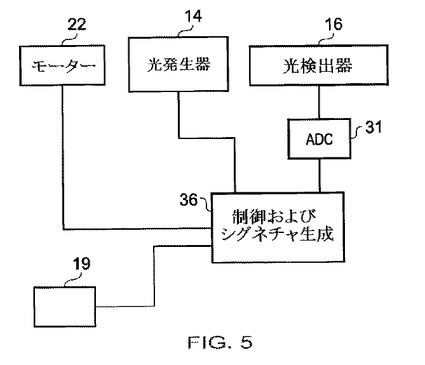
【図6】
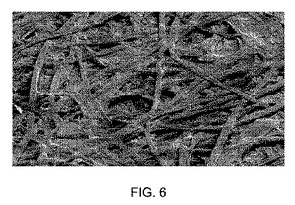
【図7】

【図8】
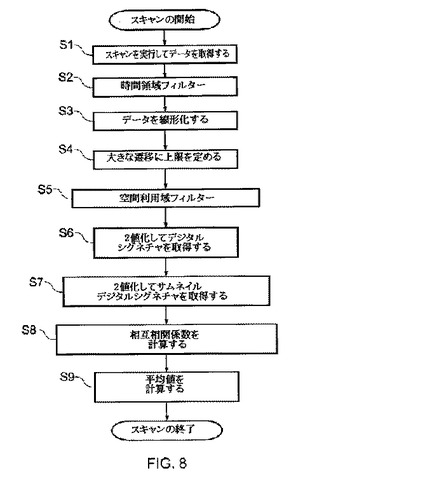
【図9a】
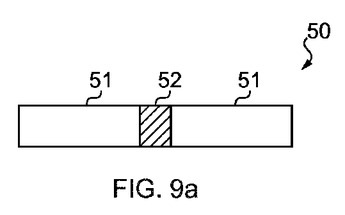
【図9b】
【図9c】
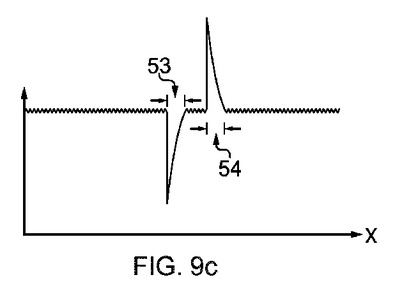
【図10】
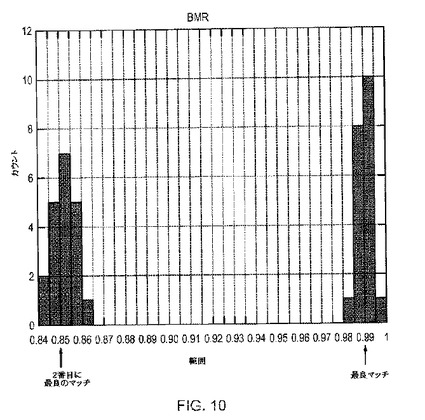
【図11a】
【図11b】
【図11c】
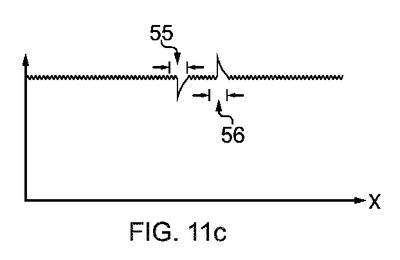
【図12】
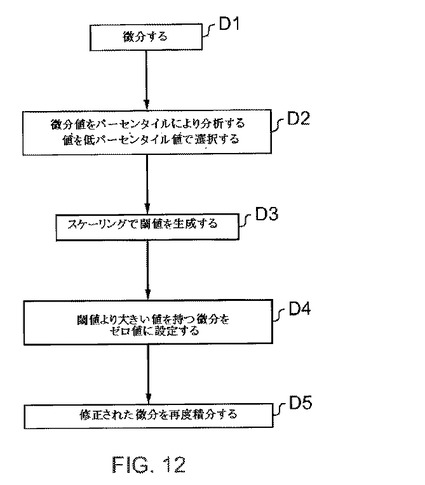
【図13a】
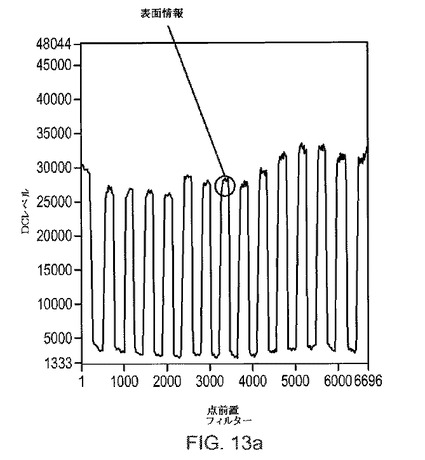
【図13b】
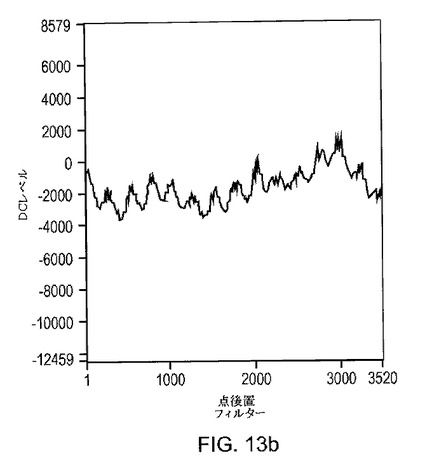
【図14a】
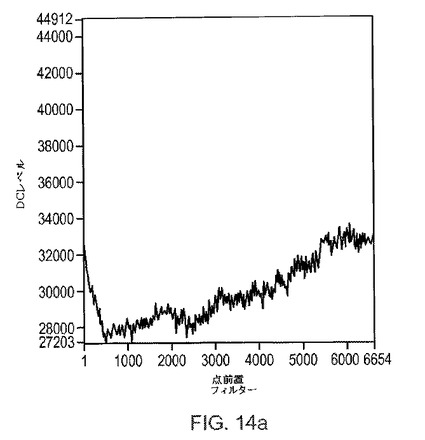
【図14b】
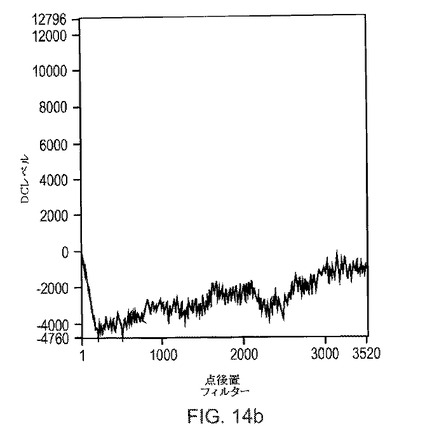
【図15】
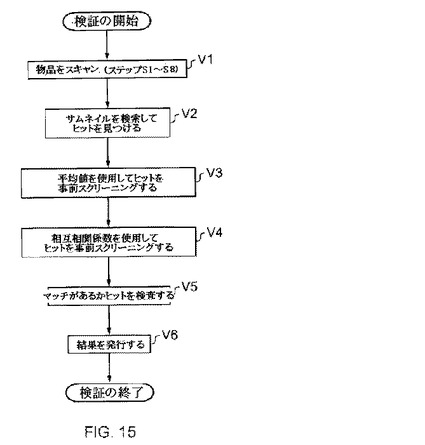
【図16】
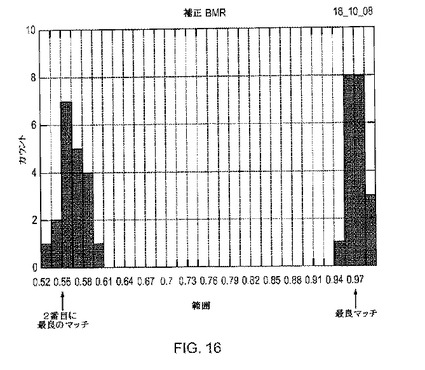
【図17】
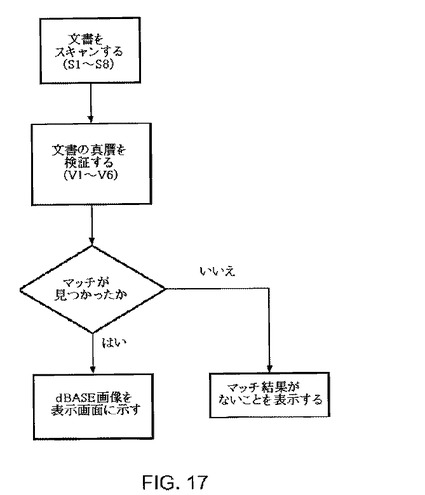
【図18】
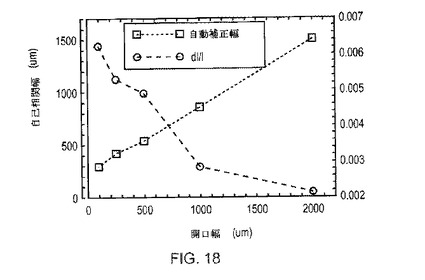
【図19a】
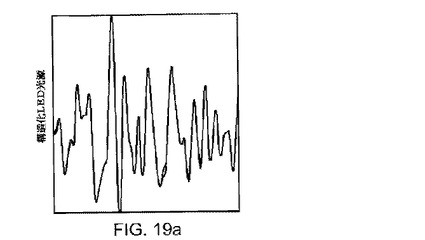
【図19b】
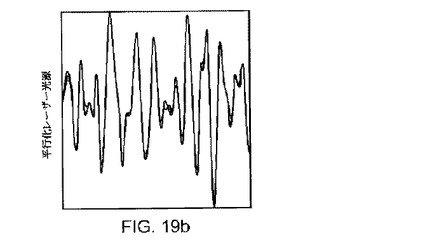
【図19c】
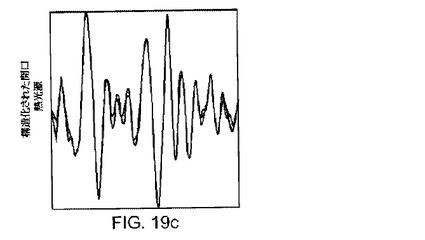
【図19d】
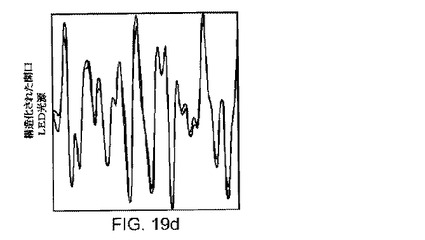
【図20】
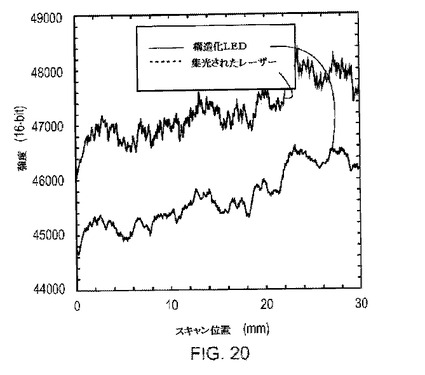
【図21】
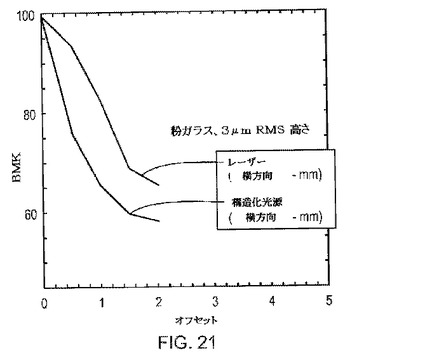
【図22】
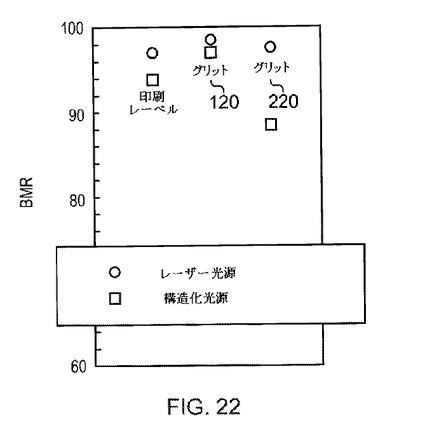
【図23a】
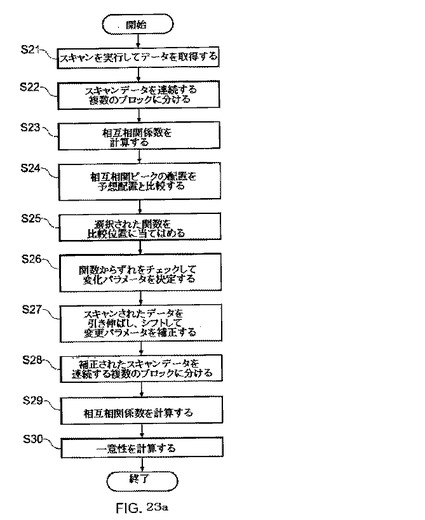
【図23b】
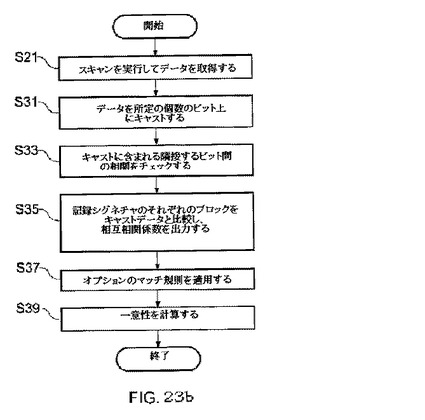
【図24a】
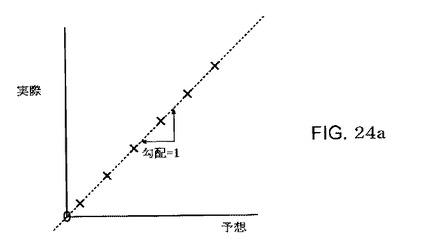
【図24b】
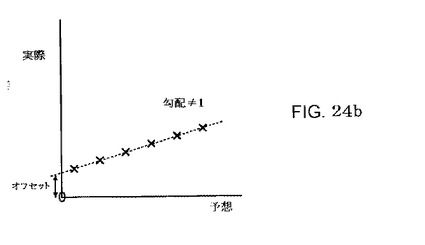
【図24c】
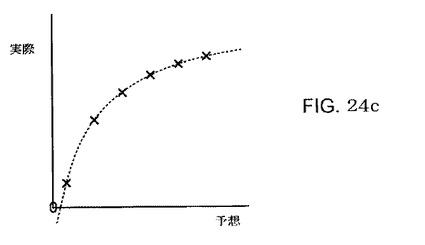
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9a】
【図9b】
【図9c】
【図10】
【図11a】
【図11b】
【図11c】
【図12】
【図13a】
【図13b】
【図14a】
【図14b】
【図15】
【図16】
【図17】
【図18】
【図19a】
【図19b】
【図19c】
【図19d】
【図20】
【図21】
【図22】
【図23a】
【図23b】
【図24a】
【図24b】
【図24c】
【公表番号】特表2012−513054(P2012−513054A)
【公表日】平成24年6月7日(2012.6.7)
【国際特許分類】
【出願番号】特願2011−541601(P2011−541601)
【出願日】平成21年12月17日(2009.12.17)
【国際出願番号】PCT/GB2009/051727
【国際公開番号】WO2010/070345
【国際公開日】平成22年6月24日(2010.6.24)
【出願人】(510308791)インジェニア・テクノロジー・(ユーケイ)・リミテッド (7)
【Fターム(参考)】
【公表日】平成24年6月7日(2012.6.7)
【国際特許分類】
【出願日】平成21年12月17日(2009.12.17)
【国際出願番号】PCT/GB2009/051727
【国際公開番号】WO2010/070345
【国際公開日】平成22年6月24日(2010.6.24)
【出願人】(510308791)インジェニア・テクノロジー・(ユーケイ)・リミテッド (7)
【Fターム(参考)】
[ Back to top ]