
自律式食品および飲料分配機
本発明は、飲料または液状食品を製造するための一体型機械を備える自律式移動ロボット装置を提案する。
【発明の詳細な説明】
【発明の詳細な説明】
【0001】
本発明の枠組みは、例えば水または牛乳のような液体および成分に基づく飲料または液状食品の製造である。
【0002】
したがって、本発明の目的は、そのような製品を魅力的に提供する技術を提案することである。
【0003】
本発明は、1つ以上のユーザインタフェースを有する、完全自律式で好ましくは完全内蔵式の移動コーヒーマシンを提案する。
【0004】
この目的は独立請求項の特徴によって達成される。従属請求項は本発明の中心的概念をさらに展開する。
【0005】
本発明は、飲料または液状食品を製造するための一体型機械を備える自律移動ロボット装置を提案する。
【0006】
本装置は製造機用のコントローラを備えることができ、該コントローラは、製造機の動作を設定することのできる無線伝送信号を受信するように設計された無線インタフェースに接続される。
【0007】
本装置は製造機用のコントローラを備えることができ、該コントローラは、製造機の動作を設定するための手動操作ユーザインタフェースに接続される。
【0008】
ユーザインタフェースは、パラメータをオフボードで入力するために、ロボットから切り離すことができる。
【0009】
本装置は、例えばロボットの視覚センサの出力信号に基づいて、ロボットを誘導するように設計された自律式ナビゲーションシステムを装備することができる。
【0010】
本製造機は自己完結型とすることができる。
【0011】
本装置は独立した電源を含むことができる。
【0012】
本製造機は、予め小分けされた原料に基づいて、飲料または液状食品を製造するように設計することができる。
【0013】
本装置は、予め小分けされた原料ポーションを蓄える容器を有することができる。
【0014】
本装置は、自動カップハンドリングシステムおよび自動トレーハンドリングシステムを備えることができる。
【0015】
本装置は、カップ収納リフト、カップ把持器(カップマニピュレータ)、およびいくつかのトレーを収納することのできるトレー収納リフトを備え、コーヒー調製のためカップをコーヒー出口の下に移動させるために、カップをカップ収納リフトから上部トレーに移送させることができる。
【0016】
本発明はまた、そのような装置用のウェブベースユーザインタフェースをも提案し、それは、グラフィック表示を利用して、コーヒーブレンド、給仕場所、および給仕日時の選択のために設計される。
【0017】
本発明はまた、そのような装置用のオンボードインタフェースをも提案し、それは、グラフィック表示を利用して、ロボットに直接コーヒーを注文するように設計される。
【0018】
本発明のさらなる目的、特徴、および利点は、添付の図面の図とともに、本発明の実施形態の以下の詳細な説明によって明らかになる。
【図面の簡単な説明】
【0019】
【図1】本発明の利用計画を示した図である。
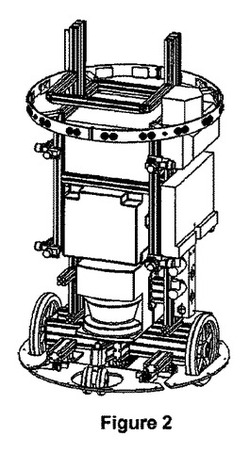
【図2】一体化されたPC、センサ、バッテリ、および駆動手段を有するロボットの移動ベースを示した図である。
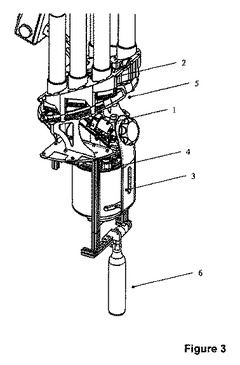
【図3】熱湯を魔法瓶から押し出し、流量計を通過して電動抽出ユニット内に送り込ませる圧力を蠕動ポンプで発生させるためのガスボトルを示した図である。
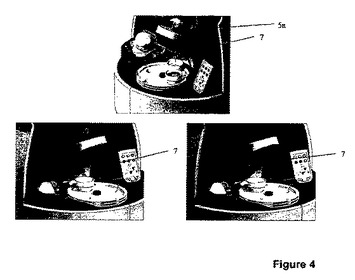
【図4】コーヒー出口システムを示した図である。
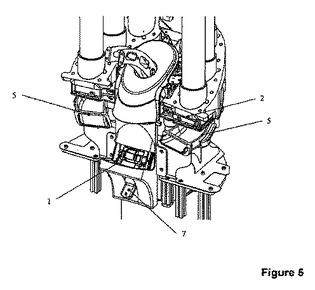
【図5】カプセル収納システムを示した図である。
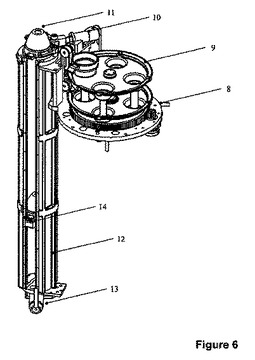
【図6】カップハンドリングシステムおよびカップ送り出しシステムを示した図である。
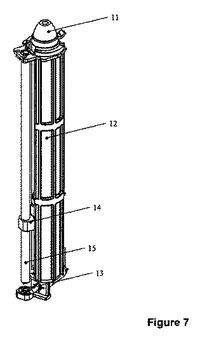
【図7】カップハンドリングシステムおよびカップ送り出しシステムの詳細を示した図である。
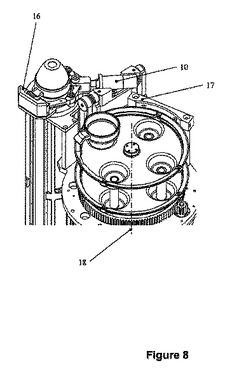
【図8】カップハンドリングシステムおよびカップ送り出しシステムの詳細を示した図である。
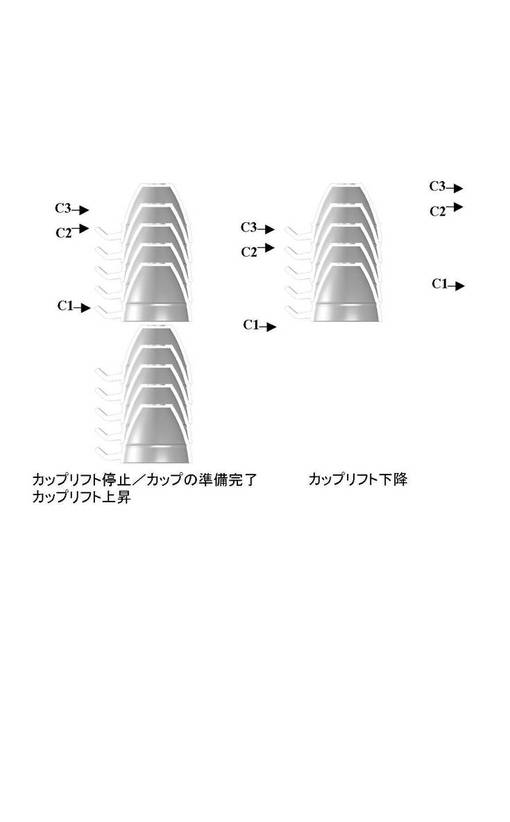
【図9】カップリフトの動作を示した図である。
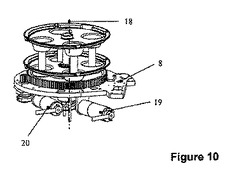
【図10】トレーリフト付きカップトレーシステムを示した図である。
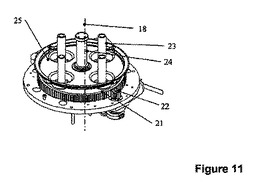
【図11】トレーリフト付きカップトレーシステムを示した図である。
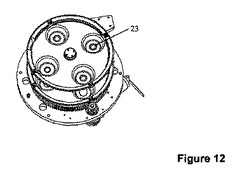
【図12】トレーリフト付きカップトレーシステムを示した図である。
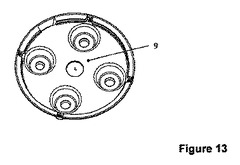
【図13】トレーリフト付きカップトレーシステムを示した図である。
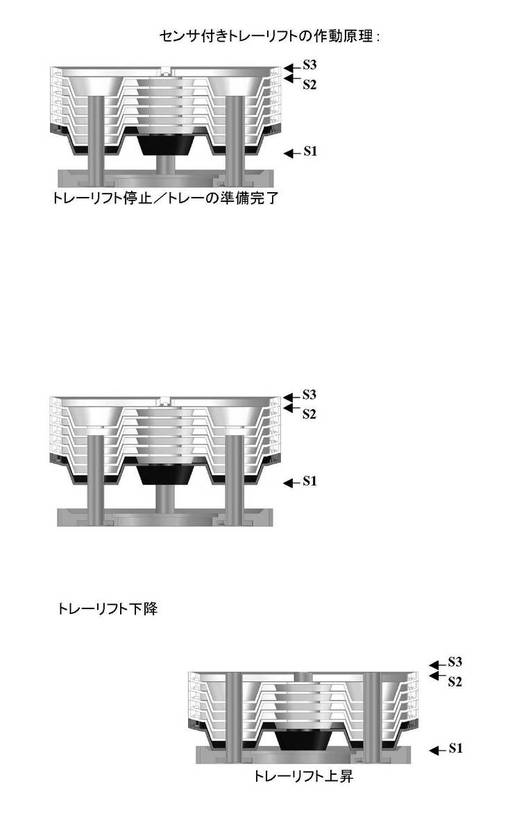
【図14】トレーリフトの動作を示した図である。
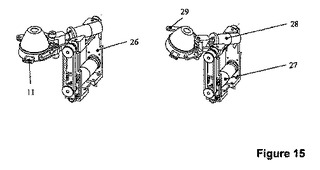
【図15】カップの把持器を示した図である。
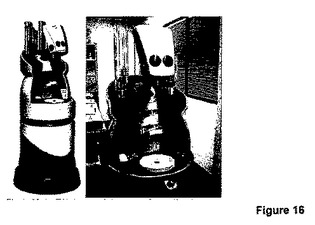
【図16】ロボット装置全体を示した図である。
【図17−1】注文ロジックを示した図である。
【図17−2】注文ロジックを示した図である。
【図17−3】注文ロジックを示した図である。
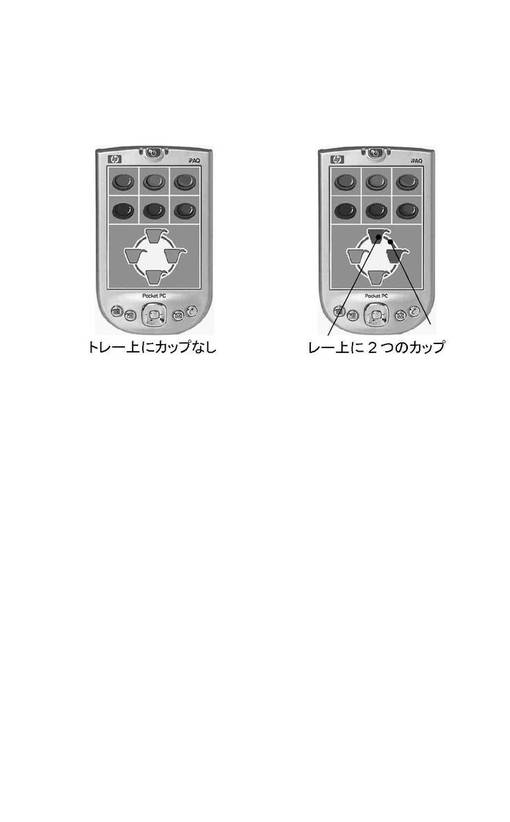
【図18】着脱自在のユーザインタフェース(ポケットPC、パーソナルデジタルアシスタント(PDA)等)を示した図である。
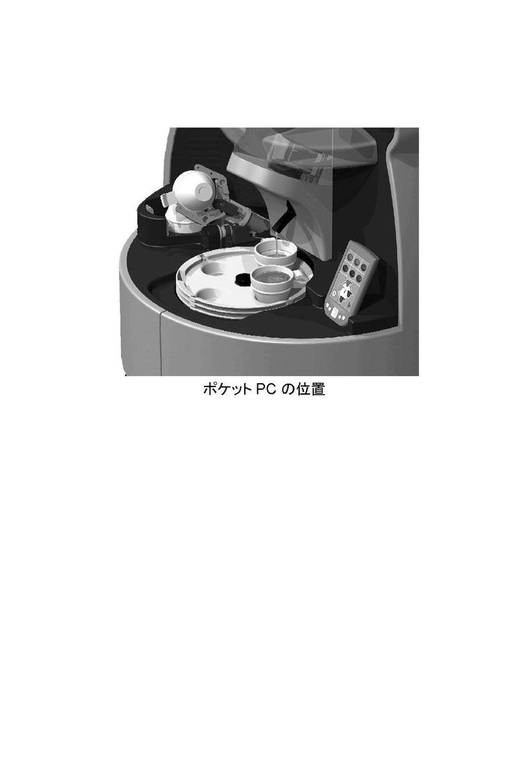
【図19】ロボットに接続された状態の着脱自在のユーザインタフェースを示した図である。
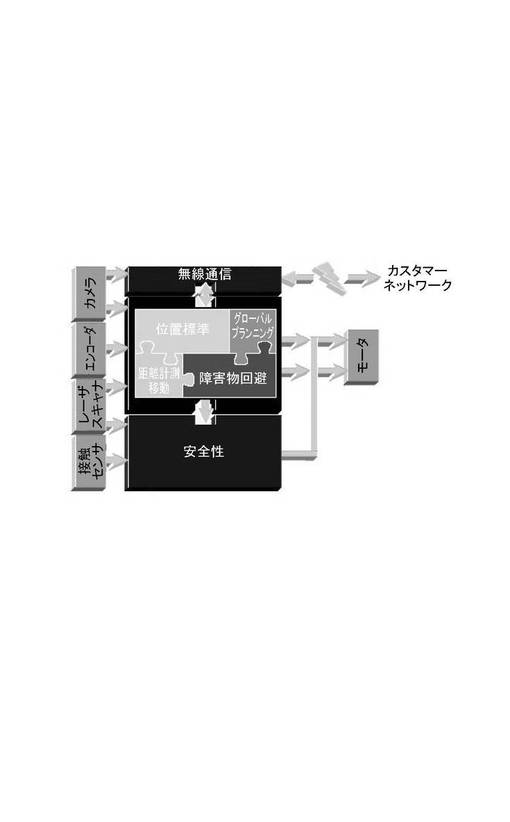
【図20】ナビゲーションシステムの概観を示した図である。
【0020】
本発明に係る装置は、第一に、図16に示す全体的外観を有するロボットである。それは2つの主要部、すなわち、図2に示す完全自律式移動ベースおよび自動自給式飲料機(例えば、コーヒー製造機)を含むことができる。つまり、ロボットは、電力、原料、液体、および演算装置のような、それ自身のリソースを運ぶ。
【0021】
自律誘導車両(AGV)は、そのナビゲーションのために、標識として、フロアトラックやリフレクタのような高価で固定式の周囲環境の変更を要するが、今日では、周囲環境の変更を要しない、つまりありのままの地形に対して位置標定する方法が利用可能である。実際、本発明に係る装置は、例えば視覚センサ(カメラ等)を装備することができ、そのセンサの出力信号のパターン認識に基づいて、その周囲環境を認識する。ロボットの周囲環境は、事前にプログラムして、オンボードPCのメモリに格納することができる。本発明に係る装置はこうして、図1に示す利用計画で動作することができる。
【0022】
以下の記述は、次の4つの部分に分かれている。
1.ロボットおよびそのナビゲーションシステム(ロボットの移動ベース)
2.電源に関して自律的に作動するコーヒーマシン(つまり電源ケーブルが無い)
3.カップハンドリングおよび送り出しシステム
4.ユーザインタフェース
【0023】
1.ロボット(移動ベース)
【0024】
図2に示す移動ベースは、自律式ナビゲーションシステムの一例である、例えばBluebotics社の自律式ナビゲーション技術(ANT(登録商標))(さらなる詳細についてはwww.bluebotics.comを参照されたい)で走行する差動駆動システムとすることができる。
【0025】
ここで、ANT技術について図20を参照しつつ説明する。ナビゲーションは、3つの部分、すなわちマップ、プランニングおよび移動、ならびに位置標定に分けて提示される。
【0026】
周囲環境のマップは、ロボットが特定のタスクを実行するために到達しなければならない、関心対象の点であるノードを含むグラフ状構造である。したがって、このグラフは経路プランニングに使用される。さらに、それは周囲環境内の全ての特徴についての情報を含む。これにより、ロボットの現在の位置からどの特徴が見えるかを計算し、それを位置標定に使用することが可能になる。
【0027】
経路プランニングおよび移動
【0028】
ANT(登録商標)は3つの経路プランニングアルゴリズムを実現する。それらは異なる抽象概念レベルで作動し、度合を変更する際に、センサ読取値を考慮に入れる。最上層はグラフベースのグローバルプランナである。それは上述のグラフ構造を基にしており、そこでノードは関心対象の位置であり、エッジは位置間の走破性(traversability)を示す。このプランナは、長さ最適経路を生成する、深さ優先探索を使用する。この経路はグローバルであり、かつセンサ読取値を考慮していないので、このレベルでは、動的な経路変更を処理することはできない。経路プランニングの2番目の層は、ロボット周辺のローカルな碁盤目(grid)におけるナビゲーション機能を利用する。したがって、それは現在のセンサ読取値を考慮に入れることができ、先験的なマップのノードに制限されない。しかし、経路は、45°の倍数である角度上に位置する直線状の線分から構成される非常に拙劣なジオメトリしか有しておらず、かつ障害物をかすめる傾向がある。経路を平滑化し、かつそれを動的な周囲に適合させることは、経路プランニングの3番目の層で行われる。それは弾性バンドに基づく。初期のプランは、弾性バンドが「切れる」ことがない限り、平滑な曲線(通過点のリスト)に向かって展開していく。経路に沿った最小限のクリアランスを維持できないように動的な障害物が経路内に移動する場合、または経路が妥当な量を超えて延長される場合には、経路を再初期化するためにプログラムが再び呼び出される。
【0029】
移動は、実時間障害物回避タスクによって制御され、それはロボットのアクチュエータの限界を考慮に入れることが可能な動的ウィンドウ方法に基づく(後で衝突を引き起こし得る速度は許可されず、移動コマンドはロボットの速度または加速度の限界を超えない)。さらに、動的ウィンドウは、凸多角形(convex polygon)によって表わされる「正確な」ロボットの形状を考慮に入れる。
【0030】
障害物に衝突する前に移動した距離を使用する代わりに、衝突までの時間が使用される。これは、ロボットがその場で方向転換するときの特異点を求める(移動した距離は零のように見えるので、どんな衝突でも瞬時のように見える)。それはまた、ロボットがより高い速度で移動しているときには、より大きなクリアランスを選択することをも意味する。
【0031】
速度、方向、およびクリアランスの目的関数はアクチュエータの位相空間で計算される。したがってアクチュエータの限界はより直接的に考慮される。
【0032】
位置標定
【0033】
この方法は、推定枠組みとしてカルマンフィルタを使用する、グローバルな特徴を基にした多数仮説位置標定である。データ関連付け問題は明示的に対処されるので、それは単一仮説カルマンフィルタの限界を克服する。ロボットは特徴を基にした手法の典型的な利点、例えば非常に高い位置標定精度および効率的な実現を維持し、ロボットがその位置を見失った場合に備えて重要な特徴を追加する。それは、その現在の位置に関する仮説を生成し、それによりそれ自体を再配置させる。
【0034】
この特性をもたらす技術は、解釈ツリーにおける制約ベース探索である。このツリーは、観察された特徴のローカルマップとモデル化された特徴のグローバルマップとで与えられる、全ての起こりうるローカル対グローバルの関連付けに及ぶ。
【0035】
同様の探索は、仮説生成および姿勢追跡にも一貫して利用される。
【0036】
内蔵式の自動コーヒーマシン
【0037】
内蔵式自動コーヒーマシンは、自律式コーヒーマシンとして作動するために、幾つかの特別な技術規則を守らなければならない。制限された電力消費、種々のブレンドの全自動カプセルハンドリング、カップおよびトレーの管理のような問題を解決しなければならない。
【0038】
コーヒーマシンは3つのサブアセンブリ、すなわち、カプセル収納および吐出システム、貯湯器、ポンプシステム、および煎出ユニットを備えるコーヒー抽出システム、ならびに最後にカップおよびトレーシステムから構成され、全自動コーヒー調製プロセスがその中で実現される。
【0039】
移動ベースは、それ自体の能動運動システム(例えばロボットの電気モータによって駆動される車輪のようなシステム)を用いて、例えば人間のような移動する物体を考慮しつつ、限定された環境において移動することができる。移動ベースは、必須ではないが好ましくは、そのセンサ(カメラ、レーザ、接触センサ等)によって検出されかつ作業環境に対応する予めプログラムされたマップと比較される実際の障害物に応じて、自己の方向付けを行なうので、望ましくは物理的なガイド要素(ライン、標識等)は不要である。マップは、ロボットベース自体によって、そのセンサを使用することによってプログラムすることができる。
【0040】
移動ベースは、電源用のバッテリのみならず、ロボット全体のためのコントローラ(コントロールPC等)および通信手段をも含む。
【0041】
2.自律式コーヒーマシン
【0042】
ロボットに組み込まれたコーヒーマシンはガス技術を使用することができる。すなわち図3に示す液体容器3に作用する加圧ガスを使用して飲料を製造する。
【0043】
図1は、抽出ユニット1だけでなくカプセル吐出機構2をも示す。カプセルは、予め小分けされた原料を使用する1つの実現手段を表す。ティーバッグ、パウチ等のような他の事前の小分け態様も利用することができる。あるいは、ロボット自体によって小分けが実行される。
【0044】
コーヒーマシンは次の部品を含む。
【0045】
・蠕動ポンプおよび能動加熱器を含み、主要なエネルギ供給源なしに魔法瓶内の水を正しい煎出温度に維持することが可能となっている魔法瓶給水タンク3。その加熱器は、電源コードで作動することができ(加熱)、次いでコードから切り離されてバッテリ加熱を使用するようになる(保温)。
【0046】
ガスボトル6は、魔法瓶給水タンク3から熱湯を押し出し、流量計4を通過して電動抽出ユニット1内に送り込ませる圧力を、蠕動ポンプ内において生成させるために使用される。
【0047】
・コーヒーを吐出しないときには出口7を垂直位置に閉じることによる滴下防止機能付きのコーヒー出口システム7(図4参照)。出口内に残っているコーヒーは、第2チューブを通して使用済みカプセルトレー内に排出される。
【0048】
・いくつかの吐出機構2の1つからカプセルを放出した後、カプセルを中央傾斜路5aで抽出ユニット1まで滑り落とさせる、2つのカプセル傾斜路5上に対称的に配置された吐出機構2付きのカプセル収納システム(例えば幾つかの収納チューブ)。
【0049】
飲料製造ユニット1では、加圧された熱湯は、カプセル内に含まれる原料と相互作用するために、カプセルの内部に注入される。(一般的に抽出ユニット1では、液体が運ばれて、望ましくは予め小分けされたパッケージで提供される原料に接触する。)
【0050】
煎出後に、カプセルは使用済みカプセルトレー内に排出される。
【0051】
3.カップハンドリングおよび送り出しシステム(図6〜15)
【0052】
ロボットは、以下の構成要素を備える独立カップハンドリングシステムを含む。
【0053】
・上部のカップ11が、常に把持器(カップマニピュレータ)10によって捕捉されるように準備された状態にしておくために、カップを自動調整するカップ収納チューブ12。さらに、センサ16、17を使用して、収納チューブは新しいカップを受け取ることができ、カップリフト14を自動調整することができる。
【0054】
実際、そのカップリフトは、垂直方向に沿ってカップホルダ14を移動させるモータ駆動13スピンドル15によって構成されている。センサ16、17は、いつでもすぐにカップ11を把持器10によって取り出してトレー9上に載せることができるようにするために、カップの位置を自動調整する。センサ16、17は図9に示す原理に従って作動し、2つのセンサ16、17がカップリフトの頂部に配置され、1つのセンサがリフトの底部に配置される。
【0055】
・センサ17を含み、図14に示す原理に従って作動し、上部トレーが常に新しいカップをすぐに受けることができるようにするために、トレー9を自動調整するカップトレーシステム。トレーの各カップ位置の4つのチューブ23は、光センサを含むことによってトレー上のカップの存在を検出することを可能にする。コーヒーをテーブルに出し、いっぱいになったトレーがロボットから取り出されると、トレーは正しい位置まで上昇する次のトレー上に、次の4つのカップをロボットが載せることを可能にするため、トレーを運び出すために、幾つかのトレーをトレーリフト上に積み重ねることができる。トレーリフトはカップリフトと同じ原理に従って作動する。さらにトレーシステムは、回転台(carousel)21上に搭載されたトレーを保持し、コーヒー出口7の下にカップを移動させる、固定シャーシ8で構成される。そのトレーの回転は、モータ20および軸18の周りの2つの対応する歯車21、22によって行われる。トレーの上下動は、第2モータ19および中心スピンドル24で構成される。4つのカップ検出チューブ23のおかげで、回転台21に対するトレーの回転を阻止することによって、トレーは上昇および下降させることができる。
【0056】
トレー9は、出されるコーヒーブレンドを識別するために、番号付けされた位置を有する。さらにどのコーヒーをどのカップで給仕すべきかを知るために、トレー回転台には指標が付与される。
【0057】
・カップ収納チューブからカップトレー上にカップを移送するためのカップ把持器(特に図15参照)。
【0058】
カップ把持器は、シャーシ26および2つのモータを備え、1つのモータ27はカップをトレー上に配置させ、1つのモータ28はカップ収納リフト内のカップ11の把持に備える。
【0059】
一般的な機能の説明
【0060】
コーヒー発注のプロセスは、以下のように説明するができる。
1.以下で説明するインタフェースの1つを用いて、コーヒーの注文を受け付ける。
2.カップが把持器によってトレーに載せられる。カップリフトが次のカップを上昇させる。把持器がカップ上の待機位置に戻る。
3.所望のカプセルが開けられて、抽出ヘッド内に滑り入れられる。
4.カップをコーヒー出口の下に置くために、カップトレーが90°回転される。
5.コーヒー出口が開き、抽出ヘッドが閉まる。
6.コーヒーの煎出。
7.コーヒー出口が閉まり、抽出ヘッドが開き、煎出済みカプセルをカプセルトレー内に排出する。
8.カップまたは代替的にトレー全体がユーザによって取り出すことができる状態になり、トレーリフトは次のトレーを上昇させる。
【0061】
4.ユーザインタフェース
【0062】
1又は複数のユーザインタフェースは、システムの要素の1つである。実際、少なくとも2つの異なるインタフェースがあり得る。
【0063】
・第1インタフェースは、ロボットのコントローラに接続されたロボットのエアインタフェースを当てにしている。エアインタフェースを使用して、例えばウェブベースアプリケーションは、安全なイントラネットネットワーク内の任意のリモートウェブブラウザから注文を出すことを可能にすることができる。代替的に、ロボットのエアインタフェースは、音声またはデータ(例えばテキストメッセージのような)をベースとする無線通信用に設計することができる。
【0064】
・第2インタフェースは、ロボットに配置して接続することのできる、例えばポケットPC、PDA、リモートコントローラのような着脱自在の手動制御ユーザインタフェースを当てにしている。着脱自在のユーザインタフェースは、コーヒーブレンドを選択するために本発明に係る装置(オンボード)で直接使用することができ、あるいは切り離してオフボードで使用することができ、例えば会議用テーブルの周りでユーザが自分のブレンドを選択することが可能になる。
【0065】
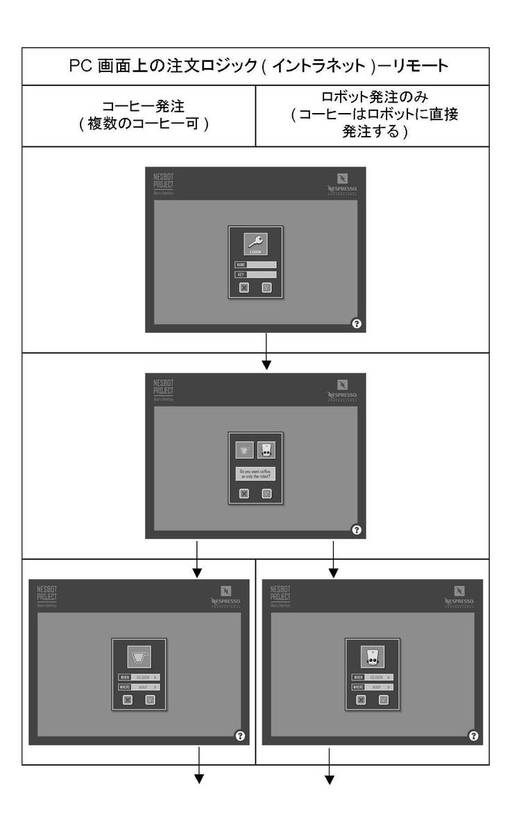
2つの発注システムを、リモート発注(イントラネット)およびロボット上またはロボット外(会議室)での直接発注(ポケットPC)として設計することができる。
【0066】
図17のグラフは、保護されたイントラネットネットワークを介してデスクトップPCで行われる典型的な発注について説明している。
【0067】
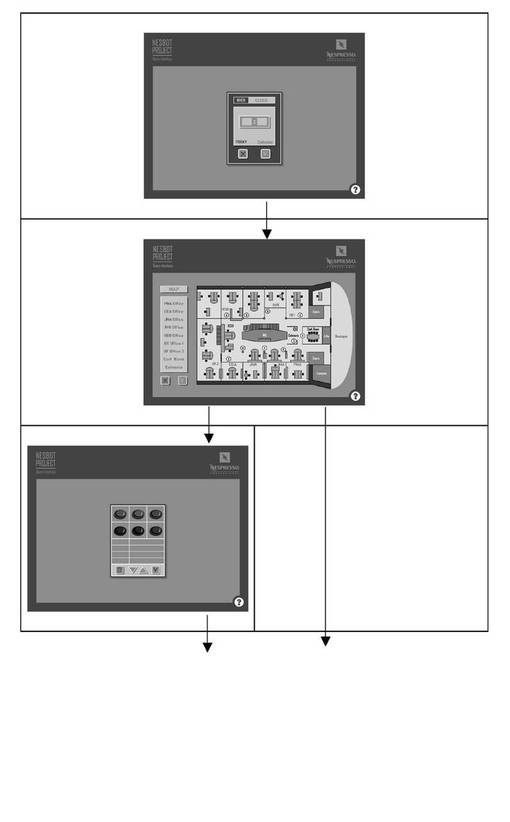
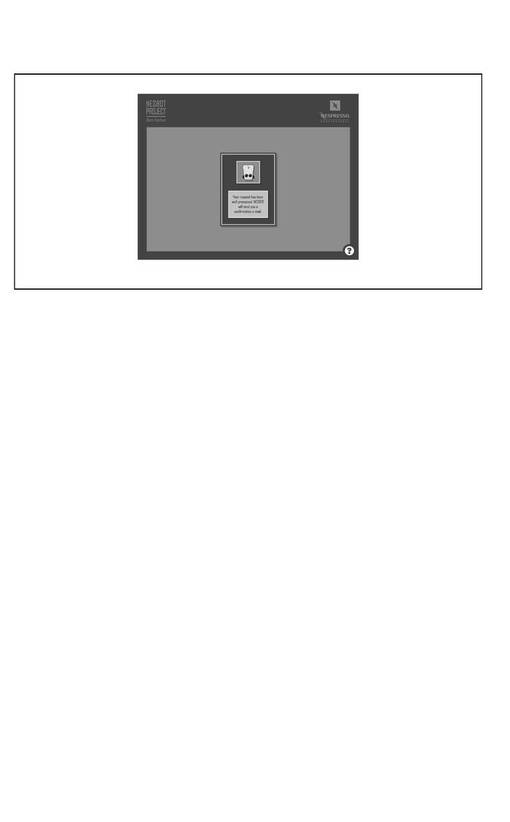
ウェブベースアプリケーションは最初に、希望するブレンドを選択するか、それともロボットの訪問を希望するだけであるかを尋ねる。最後に、ユーザインタフェースはロボットと接触する場所および時間の選択を認める。これに関しては、グラフィカルインタフェースは、例えばマップを表示することによって周囲環境を示す。ユーザは次いで、マップを使用してターゲット位置を指定することができる。
【0068】
ユーザは、自分がコーヒーを調製して欲しい所望の場所を指定することができる。ユーザは、事前のコーヒー注文をせずに所望の指示した場所にロボットが移動して欲しいだけであるかどうかを選択することができ、あるいはユーザは所望のブレンドを選択して、1杯のコーヒーを直接注文することができる。飲料吐出を所望する位置、その現在位置、およびそのナビゲーションシステムに関する伝送情報を使用して、ロボットは所望の場所に(もしあれば)所望の時間に自律的に移動し、コーヒーの注文が出されている場合には、コーヒーを調製し始める。この動作は全て、外部からの人間の操作なしに行われる。
【0069】
数人が同時にコーヒーを注文した場合、プリンタキューの場合のようなキューイングリストがロボットによって作成される。
【0070】
いくつかの衝突(conflict)は、優先順位規則を実施することによって処理することができる(例えば会議室は個人の注文より先に給仕される)。
【0071】
規定された場所で全てのコーヒーが給仕されると、ロボットは次の注文位置または再充電用のドッキングステーションに移動し続ける。
【0072】
トレーの使用状態(どのブレンドがどのカップに入っているか)を示すために、ポケットPCがロボットに配置され、そのポケットPCは、所望のブレンドをクリックするだけで直接オンボードでのコーヒー発注を可能にする。発注後、ロボットはすぐにコーヒー調製を開始する。前述の通り、会議用テーブルの周りでコーヒーの注文を出すために(オフボードコーヒー発注)ポケットPCはロボットから取り外すことができる。
【0073】
注文プロセスを除き、外部からの操作なしにコーヒーを自動的に給仕する、完全自律式コーヒーマシン。
【発明の詳細な説明】
【0001】
本発明の枠組みは、例えば水または牛乳のような液体および成分に基づく飲料または液状食品の製造である。
【0002】
したがって、本発明の目的は、そのような製品を魅力的に提供する技術を提案することである。
【0003】
本発明は、1つ以上のユーザインタフェースを有する、完全自律式で好ましくは完全内蔵式の移動コーヒーマシンを提案する。
【0004】
この目的は独立請求項の特徴によって達成される。従属請求項は本発明の中心的概念をさらに展開する。
【0005】
本発明は、飲料または液状食品を製造するための一体型機械を備える自律移動ロボット装置を提案する。
【0006】
本装置は製造機用のコントローラを備えることができ、該コントローラは、製造機の動作を設定することのできる無線伝送信号を受信するように設計された無線インタフェースに接続される。
【0007】
本装置は製造機用のコントローラを備えることができ、該コントローラは、製造機の動作を設定するための手動操作ユーザインタフェースに接続される。
【0008】
ユーザインタフェースは、パラメータをオフボードで入力するために、ロボットから切り離すことができる。
【0009】
本装置は、例えばロボットの視覚センサの出力信号に基づいて、ロボットを誘導するように設計された自律式ナビゲーションシステムを装備することができる。
【0010】
本製造機は自己完結型とすることができる。
【0011】
本装置は独立した電源を含むことができる。
【0012】
本製造機は、予め小分けされた原料に基づいて、飲料または液状食品を製造するように設計することができる。
【0013】
本装置は、予め小分けされた原料ポーションを蓄える容器を有することができる。
【0014】
本装置は、自動カップハンドリングシステムおよび自動トレーハンドリングシステムを備えることができる。
【0015】
本装置は、カップ収納リフト、カップ把持器(カップマニピュレータ)、およびいくつかのトレーを収納することのできるトレー収納リフトを備え、コーヒー調製のためカップをコーヒー出口の下に移動させるために、カップをカップ収納リフトから上部トレーに移送させることができる。
【0016】
本発明はまた、そのような装置用のウェブベースユーザインタフェースをも提案し、それは、グラフィック表示を利用して、コーヒーブレンド、給仕場所、および給仕日時の選択のために設計される。
【0017】
本発明はまた、そのような装置用のオンボードインタフェースをも提案し、それは、グラフィック表示を利用して、ロボットに直接コーヒーを注文するように設計される。
【0018】
本発明のさらなる目的、特徴、および利点は、添付の図面の図とともに、本発明の実施形態の以下の詳細な説明によって明らかになる。
【図面の簡単な説明】
【0019】
【図1】本発明の利用計画を示した図である。
【図2】一体化されたPC、センサ、バッテリ、および駆動手段を有するロボットの移動ベースを示した図である。
【図3】熱湯を魔法瓶から押し出し、流量計を通過して電動抽出ユニット内に送り込ませる圧力を蠕動ポンプで発生させるためのガスボトルを示した図である。
【図4】コーヒー出口システムを示した図である。
【図5】カプセル収納システムを示した図である。
【図6】カップハンドリングシステムおよびカップ送り出しシステムを示した図である。
【図7】カップハンドリングシステムおよびカップ送り出しシステムの詳細を示した図である。
【図8】カップハンドリングシステムおよびカップ送り出しシステムの詳細を示した図である。
【図9】カップリフトの動作を示した図である。
【図10】トレーリフト付きカップトレーシステムを示した図である。
【図11】トレーリフト付きカップトレーシステムを示した図である。
【図12】トレーリフト付きカップトレーシステムを示した図である。
【図13】トレーリフト付きカップトレーシステムを示した図である。
【図14】トレーリフトの動作を示した図である。
【図15】カップの把持器を示した図である。
【図16】ロボット装置全体を示した図である。
【図17−1】注文ロジックを示した図である。
【図17−2】注文ロジックを示した図である。
【図17−3】注文ロジックを示した図である。
【図18】着脱自在のユーザインタフェース(ポケットPC、パーソナルデジタルアシスタント(PDA)等)を示した図である。
【図19】ロボットに接続された状態の着脱自在のユーザインタフェースを示した図である。
【図20】ナビゲーションシステムの概観を示した図である。
【0020】
本発明に係る装置は、第一に、図16に示す全体的外観を有するロボットである。それは2つの主要部、すなわち、図2に示す完全自律式移動ベースおよび自動自給式飲料機(例えば、コーヒー製造機)を含むことができる。つまり、ロボットは、電力、原料、液体、および演算装置のような、それ自身のリソースを運ぶ。
【0021】
自律誘導車両(AGV)は、そのナビゲーションのために、標識として、フロアトラックやリフレクタのような高価で固定式の周囲環境の変更を要するが、今日では、周囲環境の変更を要しない、つまりありのままの地形に対して位置標定する方法が利用可能である。実際、本発明に係る装置は、例えば視覚センサ(カメラ等)を装備することができ、そのセンサの出力信号のパターン認識に基づいて、その周囲環境を認識する。ロボットの周囲環境は、事前にプログラムして、オンボードPCのメモリに格納することができる。本発明に係る装置はこうして、図1に示す利用計画で動作することができる。
【0022】
以下の記述は、次の4つの部分に分かれている。
1.ロボットおよびそのナビゲーションシステム(ロボットの移動ベース)
2.電源に関して自律的に作動するコーヒーマシン(つまり電源ケーブルが無い)
3.カップハンドリングおよび送り出しシステム
4.ユーザインタフェース
【0023】
1.ロボット(移動ベース)
【0024】
図2に示す移動ベースは、自律式ナビゲーションシステムの一例である、例えばBluebotics社の自律式ナビゲーション技術(ANT(登録商標))(さらなる詳細についてはwww.bluebotics.comを参照されたい)で走行する差動駆動システムとすることができる。
【0025】
ここで、ANT技術について図20を参照しつつ説明する。ナビゲーションは、3つの部分、すなわちマップ、プランニングおよび移動、ならびに位置標定に分けて提示される。
【0026】
周囲環境のマップは、ロボットが特定のタスクを実行するために到達しなければならない、関心対象の点であるノードを含むグラフ状構造である。したがって、このグラフは経路プランニングに使用される。さらに、それは周囲環境内の全ての特徴についての情報を含む。これにより、ロボットの現在の位置からどの特徴が見えるかを計算し、それを位置標定に使用することが可能になる。
【0027】
経路プランニングおよび移動
【0028】
ANT(登録商標)は3つの経路プランニングアルゴリズムを実現する。それらは異なる抽象概念レベルで作動し、度合を変更する際に、センサ読取値を考慮に入れる。最上層はグラフベースのグローバルプランナである。それは上述のグラフ構造を基にしており、そこでノードは関心対象の位置であり、エッジは位置間の走破性(traversability)を示す。このプランナは、長さ最適経路を生成する、深さ優先探索を使用する。この経路はグローバルであり、かつセンサ読取値を考慮していないので、このレベルでは、動的な経路変更を処理することはできない。経路プランニングの2番目の層は、ロボット周辺のローカルな碁盤目(grid)におけるナビゲーション機能を利用する。したがって、それは現在のセンサ読取値を考慮に入れることができ、先験的なマップのノードに制限されない。しかし、経路は、45°の倍数である角度上に位置する直線状の線分から構成される非常に拙劣なジオメトリしか有しておらず、かつ障害物をかすめる傾向がある。経路を平滑化し、かつそれを動的な周囲に適合させることは、経路プランニングの3番目の層で行われる。それは弾性バンドに基づく。初期のプランは、弾性バンドが「切れる」ことがない限り、平滑な曲線(通過点のリスト)に向かって展開していく。経路に沿った最小限のクリアランスを維持できないように動的な障害物が経路内に移動する場合、または経路が妥当な量を超えて延長される場合には、経路を再初期化するためにプログラムが再び呼び出される。
【0029】
移動は、実時間障害物回避タスクによって制御され、それはロボットのアクチュエータの限界を考慮に入れることが可能な動的ウィンドウ方法に基づく(後で衝突を引き起こし得る速度は許可されず、移動コマンドはロボットの速度または加速度の限界を超えない)。さらに、動的ウィンドウは、凸多角形(convex polygon)によって表わされる「正確な」ロボットの形状を考慮に入れる。
【0030】
障害物に衝突する前に移動した距離を使用する代わりに、衝突までの時間が使用される。これは、ロボットがその場で方向転換するときの特異点を求める(移動した距離は零のように見えるので、どんな衝突でも瞬時のように見える)。それはまた、ロボットがより高い速度で移動しているときには、より大きなクリアランスを選択することをも意味する。
【0031】
速度、方向、およびクリアランスの目的関数はアクチュエータの位相空間で計算される。したがってアクチュエータの限界はより直接的に考慮される。
【0032】
位置標定
【0033】
この方法は、推定枠組みとしてカルマンフィルタを使用する、グローバルな特徴を基にした多数仮説位置標定である。データ関連付け問題は明示的に対処されるので、それは単一仮説カルマンフィルタの限界を克服する。ロボットは特徴を基にした手法の典型的な利点、例えば非常に高い位置標定精度および効率的な実現を維持し、ロボットがその位置を見失った場合に備えて重要な特徴を追加する。それは、その現在の位置に関する仮説を生成し、それによりそれ自体を再配置させる。
【0034】
この特性をもたらす技術は、解釈ツリーにおける制約ベース探索である。このツリーは、観察された特徴のローカルマップとモデル化された特徴のグローバルマップとで与えられる、全ての起こりうるローカル対グローバルの関連付けに及ぶ。
【0035】
同様の探索は、仮説生成および姿勢追跡にも一貫して利用される。
【0036】
内蔵式の自動コーヒーマシン
【0037】
内蔵式自動コーヒーマシンは、自律式コーヒーマシンとして作動するために、幾つかの特別な技術規則を守らなければならない。制限された電力消費、種々のブレンドの全自動カプセルハンドリング、カップおよびトレーの管理のような問題を解決しなければならない。
【0038】
コーヒーマシンは3つのサブアセンブリ、すなわち、カプセル収納および吐出システム、貯湯器、ポンプシステム、および煎出ユニットを備えるコーヒー抽出システム、ならびに最後にカップおよびトレーシステムから構成され、全自動コーヒー調製プロセスがその中で実現される。
【0039】
移動ベースは、それ自体の能動運動システム(例えばロボットの電気モータによって駆動される車輪のようなシステム)を用いて、例えば人間のような移動する物体を考慮しつつ、限定された環境において移動することができる。移動ベースは、必須ではないが好ましくは、そのセンサ(カメラ、レーザ、接触センサ等)によって検出されかつ作業環境に対応する予めプログラムされたマップと比較される実際の障害物に応じて、自己の方向付けを行なうので、望ましくは物理的なガイド要素(ライン、標識等)は不要である。マップは、ロボットベース自体によって、そのセンサを使用することによってプログラムすることができる。
【0040】
移動ベースは、電源用のバッテリのみならず、ロボット全体のためのコントローラ(コントロールPC等)および通信手段をも含む。
【0041】
2.自律式コーヒーマシン
【0042】
ロボットに組み込まれたコーヒーマシンはガス技術を使用することができる。すなわち図3に示す液体容器3に作用する加圧ガスを使用して飲料を製造する。
【0043】
図1は、抽出ユニット1だけでなくカプセル吐出機構2をも示す。カプセルは、予め小分けされた原料を使用する1つの実現手段を表す。ティーバッグ、パウチ等のような他の事前の小分け態様も利用することができる。あるいは、ロボット自体によって小分けが実行される。
【0044】
コーヒーマシンは次の部品を含む。
【0045】
・蠕動ポンプおよび能動加熱器を含み、主要なエネルギ供給源なしに魔法瓶内の水を正しい煎出温度に維持することが可能となっている魔法瓶給水タンク3。その加熱器は、電源コードで作動することができ(加熱)、次いでコードから切り離されてバッテリ加熱を使用するようになる(保温)。
【0046】
ガスボトル6は、魔法瓶給水タンク3から熱湯を押し出し、流量計4を通過して電動抽出ユニット1内に送り込ませる圧力を、蠕動ポンプ内において生成させるために使用される。
【0047】
・コーヒーを吐出しないときには出口7を垂直位置に閉じることによる滴下防止機能付きのコーヒー出口システム7(図4参照)。出口内に残っているコーヒーは、第2チューブを通して使用済みカプセルトレー内に排出される。
【0048】
・いくつかの吐出機構2の1つからカプセルを放出した後、カプセルを中央傾斜路5aで抽出ユニット1まで滑り落とさせる、2つのカプセル傾斜路5上に対称的に配置された吐出機構2付きのカプセル収納システム(例えば幾つかの収納チューブ)。
【0049】
飲料製造ユニット1では、加圧された熱湯は、カプセル内に含まれる原料と相互作用するために、カプセルの内部に注入される。(一般的に抽出ユニット1では、液体が運ばれて、望ましくは予め小分けされたパッケージで提供される原料に接触する。)
【0050】
煎出後に、カプセルは使用済みカプセルトレー内に排出される。
【0051】
3.カップハンドリングおよび送り出しシステム(図6〜15)
【0052】
ロボットは、以下の構成要素を備える独立カップハンドリングシステムを含む。
【0053】
・上部のカップ11が、常に把持器(カップマニピュレータ)10によって捕捉されるように準備された状態にしておくために、カップを自動調整するカップ収納チューブ12。さらに、センサ16、17を使用して、収納チューブは新しいカップを受け取ることができ、カップリフト14を自動調整することができる。
【0054】
実際、そのカップリフトは、垂直方向に沿ってカップホルダ14を移動させるモータ駆動13スピンドル15によって構成されている。センサ16、17は、いつでもすぐにカップ11を把持器10によって取り出してトレー9上に載せることができるようにするために、カップの位置を自動調整する。センサ16、17は図9に示す原理に従って作動し、2つのセンサ16、17がカップリフトの頂部に配置され、1つのセンサがリフトの底部に配置される。
【0055】
・センサ17を含み、図14に示す原理に従って作動し、上部トレーが常に新しいカップをすぐに受けることができるようにするために、トレー9を自動調整するカップトレーシステム。トレーの各カップ位置の4つのチューブ23は、光センサを含むことによってトレー上のカップの存在を検出することを可能にする。コーヒーをテーブルに出し、いっぱいになったトレーがロボットから取り出されると、トレーは正しい位置まで上昇する次のトレー上に、次の4つのカップをロボットが載せることを可能にするため、トレーを運び出すために、幾つかのトレーをトレーリフト上に積み重ねることができる。トレーリフトはカップリフトと同じ原理に従って作動する。さらにトレーシステムは、回転台(carousel)21上に搭載されたトレーを保持し、コーヒー出口7の下にカップを移動させる、固定シャーシ8で構成される。そのトレーの回転は、モータ20および軸18の周りの2つの対応する歯車21、22によって行われる。トレーの上下動は、第2モータ19および中心スピンドル24で構成される。4つのカップ検出チューブ23のおかげで、回転台21に対するトレーの回転を阻止することによって、トレーは上昇および下降させることができる。
【0056】
トレー9は、出されるコーヒーブレンドを識別するために、番号付けされた位置を有する。さらにどのコーヒーをどのカップで給仕すべきかを知るために、トレー回転台には指標が付与される。
【0057】
・カップ収納チューブからカップトレー上にカップを移送するためのカップ把持器(特に図15参照)。
【0058】
カップ把持器は、シャーシ26および2つのモータを備え、1つのモータ27はカップをトレー上に配置させ、1つのモータ28はカップ収納リフト内のカップ11の把持に備える。
【0059】
一般的な機能の説明
【0060】
コーヒー発注のプロセスは、以下のように説明するができる。
1.以下で説明するインタフェースの1つを用いて、コーヒーの注文を受け付ける。
2.カップが把持器によってトレーに載せられる。カップリフトが次のカップを上昇させる。把持器がカップ上の待機位置に戻る。
3.所望のカプセルが開けられて、抽出ヘッド内に滑り入れられる。
4.カップをコーヒー出口の下に置くために、カップトレーが90°回転される。
5.コーヒー出口が開き、抽出ヘッドが閉まる。
6.コーヒーの煎出。
7.コーヒー出口が閉まり、抽出ヘッドが開き、煎出済みカプセルをカプセルトレー内に排出する。
8.カップまたは代替的にトレー全体がユーザによって取り出すことができる状態になり、トレーリフトは次のトレーを上昇させる。
【0061】
4.ユーザインタフェース
【0062】
1又は複数のユーザインタフェースは、システムの要素の1つである。実際、少なくとも2つの異なるインタフェースがあり得る。
【0063】
・第1インタフェースは、ロボットのコントローラに接続されたロボットのエアインタフェースを当てにしている。エアインタフェースを使用して、例えばウェブベースアプリケーションは、安全なイントラネットネットワーク内の任意のリモートウェブブラウザから注文を出すことを可能にすることができる。代替的に、ロボットのエアインタフェースは、音声またはデータ(例えばテキストメッセージのような)をベースとする無線通信用に設計することができる。
【0064】
・第2インタフェースは、ロボットに配置して接続することのできる、例えばポケットPC、PDA、リモートコントローラのような着脱自在の手動制御ユーザインタフェースを当てにしている。着脱自在のユーザインタフェースは、コーヒーブレンドを選択するために本発明に係る装置(オンボード)で直接使用することができ、あるいは切り離してオフボードで使用することができ、例えば会議用テーブルの周りでユーザが自分のブレンドを選択することが可能になる。
【0065】
2つの発注システムを、リモート発注(イントラネット)およびロボット上またはロボット外(会議室)での直接発注(ポケットPC)として設計することができる。
【0066】
図17のグラフは、保護されたイントラネットネットワークを介してデスクトップPCで行われる典型的な発注について説明している。
【0067】
ウェブベースアプリケーションは最初に、希望するブレンドを選択するか、それともロボットの訪問を希望するだけであるかを尋ねる。最後に、ユーザインタフェースはロボットと接触する場所および時間の選択を認める。これに関しては、グラフィカルインタフェースは、例えばマップを表示することによって周囲環境を示す。ユーザは次いで、マップを使用してターゲット位置を指定することができる。
【0068】
ユーザは、自分がコーヒーを調製して欲しい所望の場所を指定することができる。ユーザは、事前のコーヒー注文をせずに所望の指示した場所にロボットが移動して欲しいだけであるかどうかを選択することができ、あるいはユーザは所望のブレンドを選択して、1杯のコーヒーを直接注文することができる。飲料吐出を所望する位置、その現在位置、およびそのナビゲーションシステムに関する伝送情報を使用して、ロボットは所望の場所に(もしあれば)所望の時間に自律的に移動し、コーヒーの注文が出されている場合には、コーヒーを調製し始める。この動作は全て、外部からの人間の操作なしに行われる。
【0069】
数人が同時にコーヒーを注文した場合、プリンタキューの場合のようなキューイングリストがロボットによって作成される。
【0070】
いくつかの衝突(conflict)は、優先順位規則を実施することによって処理することができる(例えば会議室は個人の注文より先に給仕される)。
【0071】
規定された場所で全てのコーヒーが給仕されると、ロボットは次の注文位置または再充電用のドッキングステーションに移動し続ける。
【0072】
トレーの使用状態(どのブレンドがどのカップに入っているか)を示すために、ポケットPCがロボットに配置され、そのポケットPCは、所望のブレンドをクリックするだけで直接オンボードでのコーヒー発注を可能にする。発注後、ロボットはすぐにコーヒー調製を開始する。前述の通り、会議用テーブルの周りでコーヒーの注文を出すために(オフボードコーヒー発注)ポケットPCはロボットから取り外すことができる。
【0073】
注文プロセスを除き、外部からの操作なしにコーヒーを自動的に給仕する、完全自律式コーヒーマシン。
【特許請求の範囲】
【請求項1】
能動運動機構を有し、飲料または液状食品を製造するための一体型機械を備える、自律式移動ロボット装置。
【請求項2】
前記製造機用のコントローラを備え、前記コントローラが、前記製造機の動作を設定することのできる無線伝送信号を受信するように設計された無線インタフェースに接続される、請求項1に記載の装置。
【請求項3】
前記製造機用のコントローラを備え、前記コントローラが前記製造機の動作を設定するための手動操作ユーザインタフェースに接続される、請求項1に記載の装置。
【請求項4】
前記ユーザインタフェースは、オフボードでパラメータを入力するために、前記ロボットから切り離すことができる、請求項3に記載の装置。
【請求項5】
例えば前記ロボットの視覚センサの出力信号に基づいて、前記ロボットを誘導するように設計された自律式ナビゲーションシステムを備える、請求項1〜4のいずれか一項に記載の装置。
【請求項6】
前記製造機が自己完結型である、請求項1〜5のいずれか一項に記載の装置。
【請求項7】
独立した電源を備える、請求項1〜6のいずれか一項に記載の装置。
【請求項8】
前記製造機が、予め小分けされた原料に基づいて、飲料または液状食品を製造する、請求項1〜7のいずれか一項に記載の装置。
【請求項9】
前記装置が、予め小分けされた原料ポーションを蓄える容器を有する、請求項8に記載の装置。
【請求項10】
自動カップハンドリングシステムおよび自動トレーハンドリングシステムを備える、請求項1〜9のいずれか一項に記載の装置。
【請求項11】
カップ収納リフト、カップ把持器、およびいくつかのトレーを入れておくことのできるトレー収納リフトを備え、コーヒー調製のためカップをコーヒー出口の下に移動させるために、カップをカップ収納リフトから上部トレーに移送させることができる、請求項11に記載の装置。
【請求項12】
グラフィック表示を利用して、コーヒーブレンド、給仕場所、給仕日時を選択することができる実現手段を含む、請求項1〜10のいずれか一項に記載の装置のためのウェブベースユーザインタフェース。
【請求項13】
グラフィック表示を利用して、コーヒーをロボットに直接注文することを可能にする、請求項1に記載の装置のためのオンボードインタフェース。
【請求項1】
能動運動機構を有し、飲料または液状食品を製造するための一体型機械を備える、自律式移動ロボット装置。
【請求項2】
前記製造機用のコントローラを備え、前記コントローラが、前記製造機の動作を設定することのできる無線伝送信号を受信するように設計された無線インタフェースに接続される、請求項1に記載の装置。
【請求項3】
前記製造機用のコントローラを備え、前記コントローラが前記製造機の動作を設定するための手動操作ユーザインタフェースに接続される、請求項1に記載の装置。
【請求項4】
前記ユーザインタフェースは、オフボードでパラメータを入力するために、前記ロボットから切り離すことができる、請求項3に記載の装置。
【請求項5】
例えば前記ロボットの視覚センサの出力信号に基づいて、前記ロボットを誘導するように設計された自律式ナビゲーションシステムを備える、請求項1〜4のいずれか一項に記載の装置。
【請求項6】
前記製造機が自己完結型である、請求項1〜5のいずれか一項に記載の装置。
【請求項7】
独立した電源を備える、請求項1〜6のいずれか一項に記載の装置。
【請求項8】
前記製造機が、予め小分けされた原料に基づいて、飲料または液状食品を製造する、請求項1〜7のいずれか一項に記載の装置。
【請求項9】
前記装置が、予め小分けされた原料ポーションを蓄える容器を有する、請求項8に記載の装置。
【請求項10】
自動カップハンドリングシステムおよび自動トレーハンドリングシステムを備える、請求項1〜9のいずれか一項に記載の装置。
【請求項11】
カップ収納リフト、カップ把持器、およびいくつかのトレーを入れておくことのできるトレー収納リフトを備え、コーヒー調製のためカップをコーヒー出口の下に移動させるために、カップをカップ収納リフトから上部トレーに移送させることができる、請求項11に記載の装置。
【請求項12】
グラフィック表示を利用して、コーヒーブレンド、給仕場所、給仕日時を選択することができる実現手段を含む、請求項1〜10のいずれか一項に記載の装置のためのウェブベースユーザインタフェース。
【請求項13】
グラフィック表示を利用して、コーヒーをロボットに直接注文することを可能にする、請求項1に記載の装置のためのオンボードインタフェース。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図10】
【図11】
【図12】
【図13】
【図15】
【図16】
【図9】
【図14】
【図17−1】
【図17−2】
【図17−3】
【図18】
【図19】
【図20】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図10】
【図11】
【図12】
【図13】
【図15】
【図16】
【図9】
【図14】
【図17−1】
【図17−2】
【図17−3】
【図18】
【図19】
【図20】
【公表番号】特表2010−517875(P2010−517875A)
【公表日】平成22年5月27日(2010.5.27)
【国際特許分類】
【出願番号】特願2009−545920(P2009−545920)
【出願日】平成20年1月17日(2008.1.17)
【国際出願番号】PCT/EP2008/050478
【国際公開番号】WO2008/087171
【国際公開日】平成20年7月24日(2008.7.24)
【出願人】(599132904)ネステク ソシエテ アノニム (637)
【Fターム(参考)】
【公表日】平成22年5月27日(2010.5.27)
【国際特許分類】
【出願日】平成20年1月17日(2008.1.17)
【国際出願番号】PCT/EP2008/050478
【国際公開番号】WO2008/087171
【国際公開日】平成20年7月24日(2008.7.24)
【出願人】(599132904)ネステク ソシエテ アノニム (637)
【Fターム(参考)】
[ Back to top ]