
自律的に作動するツールを備えているロボットシステム
【課題】液体取扱動作を実行することのできる2つ又はそれ以上のピペット作用ヘッド又は他のツール、を使用するロボットシステムの処理能力を上げるための方法と装置を提供する。
【解決手段】第1ツール3は、ロボット装置2と切り離し可能に係合され、ロボット装置2は、第1ツール3を制御し、少なくとも1つの液体取り扱いの仕事又は操作を、少なくとも1つの液体試料に対して実行する。第1ツール3は、次に、支持台4上の第1位置に位置決めされ、ロボット装置2から切り離される。その後、第1ツール3は、支持台4上にあり、ロボット装置から分離されている間に、少なくとも1つの液体取り扱いの仕事又は操作を実行する。
【解決手段】第1ツール3は、ロボット装置2と切り離し可能に係合され、ロボット装置2は、第1ツール3を制御し、少なくとも1つの液体取り扱いの仕事又は操作を、少なくとも1つの液体試料に対して実行する。第1ツール3は、次に、支持台4上の第1位置に位置決めされ、ロボット装置2から切り離される。その後、第1ツール3は、支持台4上にあり、ロボット装置から分離されている間に、少なくとも1つの液体取り扱いの仕事又は操作を実行する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自律的に作動するツールを備えているロボットシステムに関する。
【背景技術】
【0002】
本出願は、2006年4月24日出願の米国仮特許出願第60/794,356号への優先権を請求する 。
ロボットシステムは、物品を製造するために、及び他の仕事を実行するために広く使用されている。その様なシステムは、例えば、ゲノム及び/又は蛋白質の分析、及び他の処理に関わる液体試料を操作するのに一般に使用されている。液体試料を取り扱うのに合わせて作られたロボットシステムの中には、2つ又はそれ以上の取り外し可能なピペット作用ヘッド、又は他の試料取扱ツールを使用するものもある。ある種の装置では、ロボットアームは、2つ又はそれ以上のツールを互いに交換し、例えば、把持ツールを使用してマルチウェルプレートを動かし、把持ツールをスタンドの上に落とし、スタンド上の第2液体取扱ツールをピックアップしてマルチウェルプレート内の試料を吸入又は分注するのに使用する。
【発明の概要】
【課題を解決するための手段】
【0003】
本発明は、交換可能なツール、例えば、液体取扱動作を実行することのできる2つ又はそれ以上のピペット作用ヘッド又は他のツール、を使用するロボットシステムの処理能力を上げるための方法と装置を開発した。本発明の1つの態様では、試料取扱システムは、(ピックアップし/操作し/制御し/落とす)多数の液体取扱ツールと切り離し可能に係合させることのできる単一のロボットアームを使用する。本発明の1つの態様では、しかしながら、ツールは自動的に作動し、例えば、ロボットアームとは別のスタンド又は他の支持台の上に置かれると、1つ又は複数の液体試料取扱動作を実行する。即ち、ロボットアームから切り離されているツールが、例えば、マルチウェルプレート、バイアルなどの様な試料ホルダー内に位置しているか、又はツールのチャネル又は他の区域に位置している、1つ又はそれ以上の液体試料に対して、1つ又は複数の液体試料取扱機能を実行する。この装置の1つの特徴は、液体取扱処理が、単一のロボットアームから切り離されてはいるが、それでもなおそのロボットアームで操縦することのできる複数のツールヘッドで、並行して実行されることである。これは、液体取扱プロセスを高速化し、及び/又は、液体取り扱いプロセス全体を実行するのに必要なロボットアーム(又はアームの動作)の数を減らす。
【0004】
例えば、単一のロボットアームを使用して、複数のピペット作用ヘッドを操縦し、磁気ビード分離プロセスを実行する。(当技術分野では知られているように、磁気ビードは、所望のゲノム断片を、所望の断片を磁気ビード上のプライマ又は他の部分に付着させ、次に断片の付いたビードを抽出することによって、他の断片から分離させるのに一般に使われている。)プロセスを開始するには、最初の段階は、ロボットアームでピペット作用ヘッドを操縦して、多数のピペット先端又はツール上の他のチャネルに磁気ビードをピックアップすることを含んでいる。ビードは、液体の媒体の中に入っていて、例えば、ゲノム分離プロセスに使用するため、各ビードに固定されている所望のプライマ又は他の化合物を有している。磁気ビードのピックアップは、中央位置、例えば、液体媒体とビードを保持しているトレイ、で実行される。その後、ロボットアームは、現在のピペット作用ヘッドを支持台の上に、例えば、ヘッドが支持台の場所にある1つ又は複数のマルチウェルプレート又は他の液体試料ホルダーと関係付けられるように、置く。ピペット作用ヘッドは、支持台上でロボットアームから切り離され、ロボットアームは、次のピペット作用ヘッドをピックアップするなど、自由に他の仕事をできるようになる。しかしながら、支持台上に置かれた各ピペット作用ヘッドは、支持台上にある間に、例えば、ピペットチャネル及び/又は関係付けられたマルチウェルプレート内の、1つ又は複数の液体試料に対して液体取扱の仕事を続ける。液体試料取り扱いの仕事は、1つ又は複数の吸引、分注、混合、分離、及び/又は他の仕事を含んでおり、ツールによってロボットアームに接続されること無く実行することができる。これは、複数の液体試料に対してツールが実行するプロトコルの或るプロセスが、相当な時間を要し、及び/又はツールをロボットアームに接続しておく必要がない場合には、好都合である。而して、システムによって処理される、例えば、マルチウェルプレート又は他の試料ホルダー内に位置している、液体試料の数は、ロボットアームが利用できるツールの数によってのみ制限され、必ずしも、単一のピペット又は他のツールが試料に対して一組のプロセスを実行するのに要する時間の長さによって制限されるわけではない。本発明の各種態様で実行される液体試料取り扱いの仕事は、磁気ビード分離プロセスで実行されるこれらの動作に限定されるのではなく、あらゆる適したプロセス、例えば、ピペット作用ヘッド上で試薬先端無しで実行される蛋白質抽出プロセス、又は何らかの他の適したプロセス、に関係している。
【0005】
本発明の或る態様では、液体取り扱いプロセスを実行するための方法は、複数の別々のツールを操縦するロボット装置の使用を伴っている。第1ツールは、ロボット装置と切り離し可能に係合されており、ロボット装置は、第1ツールを操縦し、制御して、少なくとも1つの液体試料に関して少なくとも1つの液体取り扱いの仕事又は操作を実行するのに使用される。ロボット装置は、次に、第1ツールを支持台上の第1位置に位置決めするのに使用され、第1ツールは、ロボット装置から切り離され、支持台上の第1位置に留置される。第1ツールは、その後、支持台上にある間に、少なくとも1つの液体取り扱いの仕事又は操作を実行するように操作される。この様に、第1ツールは、ロボット装置に接続されている間及び接続されていない間の両方で、液体取り扱い操作を実行する。或る実施形態では、ツールは、支持台上にある間に、ツールとは別の制御器から制御信号を受け取ること無く、液体取り扱い操作を実行する。そうではなく、ツールは、その自身の制御下で液体取り扱い操作を実行する。支持台上にある間は、ツールに動力を供給してもしなくてもよい。
【0006】
本発明の別の態様では、ロボット装置と共に使用するツールは、それぞれが液体試料に対して液体試料取り扱い操作を実行するように作られた複数のチャネルを含んでいる。ツールのインターフェースは、動力及び/又は制御信号を受け取り、また、ロボット装置がツールを操縦できるようにするため、ロボット装置と切り離し可能に係合できるように作られた連結器を含んでいる。ツールは、更に、複数のチャネルの作用を、例えば、ツールの1つ又は複数の部分を動かして、液体がチャネルに流れ込むように制御することによって、制御するツール制御器を有している。ツールは、連結器でロボット装置に係合されているときに液体試料取り扱い操作を実行し、且つ、ロボット装置から分離されて支持台上に留置されているときも、液体試料取り扱い操作を実行するように作られている。
【0007】
本発明の別の態様では、複数の液体試料に対して液体取り扱いプロセスを実行するためのシステムは、作業区域内でツールを操縦するように作られていて、ツールと切り離し可能に係合させるための連結器を含んでいるロボット装置を含んでいる。ロボット装置とは別の支持台は、少なくとも1つのツールと、そのツールがロボット装置から切り離されたときに、係合させるために設けられている。複数のツールが、ロボット装置で使用するために設けられており、各ツールは、それぞれが液体試料に対して液体試料取り扱い操作を実行するように作られている複数のチャネルを含んでいる。このツールは、更に、動力及び/又は制御信号を受け取るインターフェースを含んでおり、インターフェースは、ロボット装置がツールを操縦できるようにするため、ロボット装置と切り離し可能に係合できるように作られた連結器を含んでいる。各ツール上の制御器は、複数のチャネルの作動を制御するので、ツールは、連結器でロボット装置に係合されているときに液体試料取り扱い操作を実行し、且つ、支持台上に留置されているときも、液体試料取り扱い操作を実行するように作られている。
[形態1]
複数の別々のツールを操縦するロボット装置の使用を伴う、液体取り扱いプロセスを実行するための方法において、
第1ツールを前記ロボット装置と切り離し可能に係合させる段階と、
前記ロボット装置を使用して、前記第1ツールを操縦し制御し、少なくとも1つの液体取り扱い操作を少なくとも1つの液体試料に対して実行する段階と、
前記ロボット装置を使用して、前記第1ツールを支持台上の第1位置に位置決めする段階と、
前記第1ツールを前記ロボット装置から切り離し、前記第1ツールを前記支持台上の前記第1位置に留置する段階と、
前記第1ツールを操作して、前記支持台上にある間に、少なくとも1つの液体取り扱い操作を実行する段階と、から成る方法。
[形態2]
前記第1ツールは、複数のピペットチャネルを含んでおり、前記支持台上で前記第1ツールによって実行される前記少なくとも1つの液体取り扱い操作は、前記複数のピペットチャネルの少なくとも1つに流体の流れを引き起こす段階を含んでいる、形態1に記載の方法。
[形態3]
前記第1ツールは、複数のピペットチャネルを含んでおり、前記ロボット装置に係合されたときに前記第1ツールによって実行される前記少なくとも1つの液体取り扱い操作は、前記複数のピペットチャネルの少なくとも1つに流体の流れを引き起こす段階を含んでいる、形態1に記載の方法。
[形態4]
前記第1ツールは、マルチウェルプレート内のウェルと相互作用するように配置されている複数のピペットチャネルを含んでいる、形態1に記載の方法。
[形態5]
前記ロボット装置は、SCARA型ロボット装置である、形態1に記載の方法。
[形態6]
少なくとも1つの液体取り扱い操作を少なくとも1つの液体試料に対して実行するように作られている第2ツールを更に備えており、前記方法は、更に、
前記ロボット装置を使用して、前記第2ツールを操縦し制御し、前記第1ツールが前記支持台上にある間に少なくとも1つの液体取り扱い操作を実行している間に、少なくとも1つの液体取り扱い操作を少なくとも1つの液体試料に対して実行する段階を含んでいる、形態1に記載の方法。
[形態7]
前記第1ツールは、支持台上にある間に、動力及び/又は制御信号を受け取る、形態1に記載の方法。
[形態8]
前記少なくとも1つの液体取り扱い操作は、液体試料を吸引すること、液体試料を分注すること、液体試料を前記第1ツールのチャネル内で攪拌すること、2つの物質を前記第1ツールのチャネルで一体に混合すること、液体試料の分析を実行すること、及び/又は液体試料の成分を分離すること、を含んでいる、形態1に記載の方法。
[形態9]
前記第1ツールは、前記支持台上にある間に、システム制御器から制御信号を受け取ること無く、少なくとも1つの液体取り扱い操作を実行する、形態1に記載の方法。
[形態10]
前記第1ツールによって前記支持台上にある間に実行される前記少なくとも1つの液体取り扱い操作は、少なくとも1つの磁気ビードを含んでいる液体試料に対して実行される、形態1に記載の方法。
[形態11]
ロボット装置で使用するためのツールにおいて、
それぞれが液体試料取り扱い操作を液体試料に対して実行するように作られている複数のチャネルと、
動力及び/又は制御信号を受け取るツールインターフェースであって、ロボット装置と切り離し可能に係合して前記ロボット装置が前記ツールを操縦できるようにするように作られている連結器を含んでいる、ツールインターフェースと、
前記複数のチャネルの作動を制御するツール制御器と、を備えており、
前記ツールは、前記ロボット装置と前記連結器で係合されている時は、前記液体試料取り扱い操作を実行し、前記ロボット装置とは別の支持台上に置かれている時は、前記液体試料取り扱い操作を実行するように作られている、ツール。
[形態12]
前記ツールは、前記支持台上にある時は、前記ツールとは別の制御器からの制御信号無しに、前記液体試料取り扱い操作を実行するように作られている、形態11に記載のツール。
[形態13]
前記ツールによって前記支持台上にある間に実行される前記少なくとも1つの液体試料取り扱い操作は、少なくとも1つの磁気ビードを含んでいる液体試料に対して実行される、形態11に記載のツール。
[形態14]
前記複数のチャネルは、マルチウェルプレート内のウェルと相互作用するように配置されている、形態11に記載のツール。
[形態15]
複数の別々のツールを操縦するロボット装置と、1つ又は複数のツールを受け取る支持台とを含んでいる、液体取り扱いプロセスを実行するためのシステムにおいて、形態11に記載の少なくとも1つのツールを備えている、システム。
[形態16]
複数の液体試料で液体取り扱いプロセスを実行するためのシステムにおいて、
ツールを作業区域内で操縦するように作られているロボット装置であって、前記ツールと切り離し可能に係合するための連結器を含んでいる、ロボット装置と、
少なくとも1つのツールと係合できるように作られている支持台であって、前記ロボット装置とは別の、支持台と、
前記ロボット装置で使用するための複数のツールであって、各ツールは、
それぞれが液体試料取り扱い操作を液体試料に対して実行するように作られている複数のチャネルと、
動力及び/又は制御信号を受け取るツールインターフェースであって、前記ロボット装置と切り離し可能に係合して前記ロボット装置が前記ツールを操縦できるようにするように作られている連結器を含んでいる、ツールインターフェースと、
前記複数のチャネルの作動を制御するツール制御器と、を備えている複数のツールと、を備えており、
前記ツールは、前記ロボット装置と前記連結器で係合されている時は、前記液体試料取り扱い操作を実行し、前記支持台上に置かれている時は、前記液体試料取り扱い操作を実行するように作られている、システム。
[形態17]
前記ロボット装置はSCARA型ロボット装置である、形態16に記載のシステム。
[形態18]
前記複数のツールは、第1及び第2のツールを含んでおり、前記ロボット装置は、前記第2ツールを操縦し制御し、前記第1ツールが前記支持台上にある間に少なくとも1つの液体取り扱い操作を実行している間に、少なくとも1つの液体取り扱い操作を少なくとも1つの液体試料に対して実行する、形態16に記載のシステム。
[形態19]
前記液体試料取り扱い操作は、液体試料を吸引すること、液体試料を分注すること、液体試料を前記ツールのチャネル内で攪拌すること、2つの物質を前記ツールのチャネルで一体に混合すること、液体試料の分析を実行すること、及び/又は液体試料の成分を分離すること、を含んでいる、形態16に記載のシステム。
[形態20]
ツールによって前記支持台上にある間に実行される前記液体試料取り扱い操作は、少なくとも1つの磁気ビードを含んでいる液体試料に対して実行される、形態16に記載のシステム。
【0008】
本発明の上記及びその他の態様は、以下の詳細な説明及び特許請求の範囲から明らかになるであろう。
【図面の簡単な説明】
【0009】
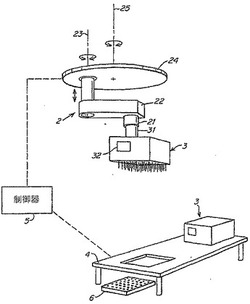
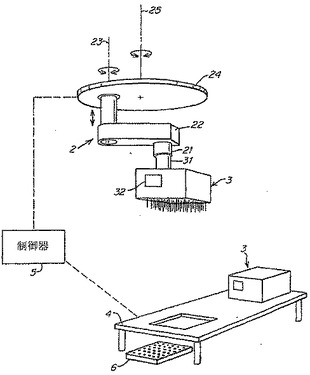
【図1】本発明の態様による、少なくとも1つのロボットアームと、複数の液体取り扱いツールとを有する液体取り扱いシステムの斜視図である。
【実施例】
【0010】
本発明の態様について添付図面を参照しながら説明する。
本発明は、その適用が、以下の説明に述べ又は図面に示す各構成要素の構造及び配置の詳細に限定されるものではない。本発明は、他の実施形態を取ることもでき、様々なやり方で実行又は実施することができる。例えば、本発明の例示的実施形態を、液体取り扱い環境で使用することに関して以下に説明する。しかしながら、本発明の態様は、あらゆる適した用途に対するロボットシステムで使用することができるものと理解されたい。
【0011】
図1は、ロボット装置2を含む液体試料取り扱いシステム1の例示的実施形態を示している。ロボット装置2には、直角座標ロボット、SCARA−型ロボット、及び/又は、適した数の自由度を有するあらゆる形式のロボットが含まれる。この例示的実施形態では、ロボット装置2は、SCARA−型ロボット(2006年1月25日出願の米国特許出願第11/339,036号に記載されているようなロボットであり、同出願を参考文献としてここに援用する)であり、軸23の周りに回転させることができ、且つ軸23に沿ってターンテーブル24に対して直線状に動かすことができ、又それ自身を軸25の周りに回転させることができるアーム22を含んでいる。ロボット装置2は、2つ又はそれ以上のツール3を、支持台4に対して、ピックアップし又は落とすことができるように作られており、ツールとは、例えば、把持ツール(例えば、マルチウェルプレート又は他の試料ホルダを持ち上げて置くためのツール)、試料ホルダ内の液体試料の光学的又はその他の分析を実行するためのツール、及び/又は他の液体試料取り扱いの仕事又は操作を実行するためのツールである。ロボット装置2は、装置2をツール3と切り離し可能に係合させることができるようにする連結器21を含んでおり、ツール3それ自身も対応する連結器31を有している。連結器21と31は、ロボット装置2とツール3の間を機械的に係合するだけでなく、電気的、光学的、空圧的、油圧的、及び/又は他の結合も提供して、動力及び/又は制御信号をツール3に提供する。ツール3に提供される動力及び/又は制御信号は、システム制御器5で生成されるが、制御器5は、ロボット装置2及び/又はシステム1の他の部分の作動を制御する機能も有している。ツール3に提供される制御信号は、どの様な形態でもよく、ツール3がどの様に動作するものでもよい。例えば、システム制御器5は、明示的な制御命令を定義する低レベルの制御信号をツール3に提供してもよい。代わりに、又は追加して、システム制御器5は、ツール3上のツール制御器32に高レベルの命令を提供し、ツール制御器32が、高レベルの命令をデコードし、ツール3の1つ又は複数の部分のために低レベルの制御信号を生成して、システム制御器5に要求された機能を実行するようにしてもよい。或る実施形態では、ツール制御器32は、システム制御器5が提供した命令を記憶し、記憶した命令を使って、後で、ロボット装置2から切り離されている間に、液体試料取り扱い操作を実行する。例えば、システム制御器5は、ツール制御器32に、ツール3が保持している液体試料に対する1つ又は複数の仕事を、ツール3がロボット装置2から切り離されたら実行するように、命令を提供してもよい。ツール3は、更に、システム制御器5に、例えば、位置のフィードバック、関係付けられた液体試料又は一組の試料の処理状態、及び/又は他の情報に関する情報を送ってもよい。ツール3とシステム制御器5の間の通信は、有線及び/又は無線接続を介してもよく、例えば、ツール3は、ロボット装置2から切り離され支持台4上にある間は、システム制御器5と無線通信するようにしてもよい。
【0012】
支持台4は、1つ又は複数のツール3と係合させるため、どの様な適したやり方で整えてもよい。この例示の実施形態では、支持台4は、テーブルの形状をしていて、ツールの一部を支持台4の下へ試料ホルダ6に向けて伸張させられるように開口が設けられている装置として示されている。しかしながら、支持台4は、他のどの様な適したやり方で整えてもよいものと理解されたい。例えば、ツール3は、支持台4として働く、開口の無い平坦な水平面の上又は下に置いてもよい。代わりに、支持台4は、ツール3が係合される垂直面を含んでいてもよい。別の実施形態では、支持台4は、ツール3と係合するフレーム、1つ又は複数の横木、棒、及び/又は他の構造を含んでいてもよい。要するに、支持台4は、適していればどの様な配置になっていてもよい。
【0013】
支持台4に接続されている間、2つ又はそれ以上のツール3は、動力(電気、空圧他)及び/又は制御信号を、支持台4との接続を介して受け取る。ツール3と支持台4の間の接続は、ツールがロボット装置2に取り付けられるときにロボット装置2とツール3の間に使われたのと同じ接続インターフェース(例えば、連結器31)を使って確立してもよいし、ツールインターフェースの一部である別の接続装置を使って確立してもよい。この様にして、ツール3は、支持台4の上に載せられ、ロボット装置2から切り離されている間に、1つ又は複数の液体試料取り扱いの仕事を実行する。支持台4の上にある間、ツール3は、マルチウェルプレートなどの様な1つ又は複数の試料ホルダ6と関係付けられ、試料ホルダ6に対して試料取り扱いの仕事を実行する。先に論じたように、ツール3は、支持台4の上にある間に、記憶していた制御命令を使って、及び/又はシステム制御器5から受け取るリアルタイムの命令に基づいて、試料取り扱いの仕事を実行する。ツール3は、システム制御器5に、例えば、現在実行している仕事、資料処理状態などを示す情報を送る。ツール3の実行する液体取り扱いの仕事を幾つか挙げると、吸引、分注、混合、試料分析、ピペット先端又は他のチャネルを、試料ホルダ6などのウェルに向けて、及びウェルから離れる方向に伸張させること、が含まれる。ツール3は、マルチウェルプレート又は他の試料ホルダ装置内のウェルに対してそれぞれ作動する、複数のピペット先端又は他のチャネルを有している。各ピペット先端又は他のチャネルは、特定の仕事を実行するようツール3によって個別に制御される。この様に、ツール3上の1つのピペット先端、毛細管、又は他のチャネルは、マルチウェルプレート又は他の試料ホルダ6の対応するウェルに対して吸引又は分注をするよう個別に制御される。代わりに、複数のピペット先端、又は他のチャネルを、液体試料取り扱いの仕事を実行する際に一体で作業するように制御してもよい。
【0014】
或る場合には、ツール3は、把持及び液体試料取り扱い操作、又は何らかの他の適した組み合わせの様な、複数の異なる仕事を実行することもできる。ここで言う「液体試料取り扱いの仕事又は操作」は、少なくとも、液体試料を吸引すること、液体試料を分注すること、液体試料をツールのチャネル内で攪拌すること、2つの物質をツールのチャネル内で一体に混合すること、液体試料の分析を実行すること、及び/又は液体試料の成分を分離すること、を含んでいる。ツール3が複数の試料ホルダ6に対して操作を実行する場合は、試料ホルダ6は、ツール3が支持台4の上にあるときにツール3に対して、例えば、コンベヤベルト、ロボット装置2又は他の装置で動かされる。代わりに、例えば、幾つかの異なる支持台4がある場合は、ツール3を試料ホルダ6に対して動かしてもよいし、及び/又は、ツール3を1つの支持台4上の異なる場所に動かして、液体試料取り扱い操作を実行してもよい。
【0015】
上記配置及び同様な構成を使用すれば、ロボット装置2とシステム制御器5は、ロボット装置2を効率的に使用して、可能なときには何時でも、マルチウェルプレート又は他の試料ホルダ内の試料の処理を、複数のツール3で、ツールがロボット装置2から切り離されている間に実行するというやり方で、ツール3を多重化することができる。この配置を使用すれば、システム1は、ツール3を支持台4上で動かして、ツール3に、1つ又は複数の試料ホルダ6を、試料ホルダ6を動かす必要無しに処理させることができる。この様に、システム1は、例えば、各ツール3がそれぞれ特定のプロセスを実行するよう特別に作られている場合は、異なるツール3を使用して、試料ホルダ6に対して異なるプロセスを実行することができる。代わりに、試料ホルダ6を、支持台4上に静的に止まっているツール3に対して動かしてもよい。例えば、試料ホルダ6を、コンベヤで、ロボット2で、又は他の他の装置で、支持台4に搭載されているツール3に対して動かしてもよい。ツールは、必要に応じて取り換えて支持台4から外してもよく、例えば、或るツールを、支持台4から処理位置で取り外し、支持台4上の洗浄位置に移動させ、ピペット先端又は他のチャネルをツール上で洗浄し、ツール3を後で使用するのに備えた状態にすることもできる。ツール3は、洗浄されている間、処理位置では、既に洗浄を完了し使用の準備が整っていた別のツール3に置き換えられている。
【0016】
或る例示的実施形態では、システム1は、幾つかのマルチウェルプレートに保持されている液体試料に対して磁気ビード分離プロセスを実行するために使用される。ロボット装置2は、自由に使える幾つかのツールを有しており、各ツール3をピックアップして、ツールが(溶液内の)磁気ビードを、又は中央貯蔵トレイから他の物質を吸引できるようにする。その後、ロボット装置2は、各ツール3を支持台4の上に置き、ツール3は、1つ又は複数の仕事を、1組の1つ又はそれ以上のマルチウェルプレート6に対して、支持台4で実行する。例えば、ツール3は、プレート6の1つ又は複数のウェルから(ゲノム断片の入っている)液体試料を吸引し、プレートからの試料を、先に吸引した磁気ビードと混合する。ゲノム断片と磁気ビードは、例えば、ツール3のチャネルから繰り返して吸引及び/又は分注することによって、混合される。その様な処理は、例えば、ビードが液体試料と混合され、所望の核酸断片がビードに付着できるようになる間に、時間を要する。而して、ツール3は、支持台4の上にある間は装置2から切り離され、装置2が、他のツール3を同様な処理に向けて準備するという様な他の仕事を実行している間に、液体試料取り扱いの仕事を実行することができる。ツール3がマルチウェルプレートの処理を完了したら、ロボット装置2は、ツール3をピックアップし、それを、他のプレートを処理するのに使用し、及び/又は、そのマルチウェルプレートを取り外し、ツール3で処理するのに備えて他のプレートを提供する。
【0017】
支持台4の上にある間にツール3によって実行される他の処理操作は、当業者には想起できるであろう。例えば、ツール3は、マルチウェルプレートから液体試料を吸引するように、ロボット装置2によって操縦される。その後、ツール3は、支持台4の上に置かれ、ツール3は、吸引した試料の一部を1つ又は複数のマルチウェルプレートのウェルに分注し、例えば、吸引した試料を、PCR又は他のプロセスをプレート上で実行する前に、他のマルチウェルプレート内の物質と組み合わせる。
【0018】
システム制御器5及び/又はツール制御器32は、所望の入力/出力及び/又は他の機能を実行するために、どの様な適した装置及び/又は構成要素を含んでいてもよい。例えば、制御器は、汎用コンピュータ、コンピュータのネットワーク、マイクロプロセッサ、及び/又は他のデータ処理装置の様な、どの様な適したプログラム可能な計算装置を含んでいてもよい。制御器は、更に、必要に応じて、どの様な適した揮発性及び/又は不揮発性メモリ、通信装置、配線及び/又はインターフェース、モーター、ドライバ、スイッチ、リレー、センサー又は他のフィードバック装置、及び/又は他の構成要素を含んでいてもよい。制御器は、少なくとも部分的には、計算装置によって実行されると制御器が所望の機能を実行する、どの様な適したソフトウェア又は他の命令を使って実装してもよい。制御器は、ディスプレイ、プッシュボタン、グラフィカルユーザーインターフェース、キーボード、及び/又は他の入力装置などの様な、適したユーザーインターフェースを含んでいてもよい。
【0019】
以上、本発明の幾つかの態様を説明してきたが、様々な変更、修正及び改善が当業者には想起さるであろうことを理解されたい。その様な変更、修正及び改善は、本開示の一部を成し、本発明の精神及び範囲に含まれるものと考えている。この様に、以上の説明と添付図面は、例証を目的としており、本発明に何ら制限を課すものではない。
【符号の説明】
【0020】
1 システム
2 ロボット装置
3 ツール
4 支持台
5 システム制御器
6 試料ホルダ
【技術分野】
【0001】
本発明は、自律的に作動するツールを備えているロボットシステムに関する。
【背景技術】
【0002】
本出願は、2006年4月24日出願の米国仮特許出願第60/794,356号への優先権を請求する 。
ロボットシステムは、物品を製造するために、及び他の仕事を実行するために広く使用されている。その様なシステムは、例えば、ゲノム及び/又は蛋白質の分析、及び他の処理に関わる液体試料を操作するのに一般に使用されている。液体試料を取り扱うのに合わせて作られたロボットシステムの中には、2つ又はそれ以上の取り外し可能なピペット作用ヘッド、又は他の試料取扱ツールを使用するものもある。ある種の装置では、ロボットアームは、2つ又はそれ以上のツールを互いに交換し、例えば、把持ツールを使用してマルチウェルプレートを動かし、把持ツールをスタンドの上に落とし、スタンド上の第2液体取扱ツールをピックアップしてマルチウェルプレート内の試料を吸入又は分注するのに使用する。
【発明の概要】
【課題を解決するための手段】
【0003】
本発明は、交換可能なツール、例えば、液体取扱動作を実行することのできる2つ又はそれ以上のピペット作用ヘッド又は他のツール、を使用するロボットシステムの処理能力を上げるための方法と装置を開発した。本発明の1つの態様では、試料取扱システムは、(ピックアップし/操作し/制御し/落とす)多数の液体取扱ツールと切り離し可能に係合させることのできる単一のロボットアームを使用する。本発明の1つの態様では、しかしながら、ツールは自動的に作動し、例えば、ロボットアームとは別のスタンド又は他の支持台の上に置かれると、1つ又は複数の液体試料取扱動作を実行する。即ち、ロボットアームから切り離されているツールが、例えば、マルチウェルプレート、バイアルなどの様な試料ホルダー内に位置しているか、又はツールのチャネル又は他の区域に位置している、1つ又はそれ以上の液体試料に対して、1つ又は複数の液体試料取扱機能を実行する。この装置の1つの特徴は、液体取扱処理が、単一のロボットアームから切り離されてはいるが、それでもなおそのロボットアームで操縦することのできる複数のツールヘッドで、並行して実行されることである。これは、液体取扱プロセスを高速化し、及び/又は、液体取り扱いプロセス全体を実行するのに必要なロボットアーム(又はアームの動作)の数を減らす。
【0004】
例えば、単一のロボットアームを使用して、複数のピペット作用ヘッドを操縦し、磁気ビード分離プロセスを実行する。(当技術分野では知られているように、磁気ビードは、所望のゲノム断片を、所望の断片を磁気ビード上のプライマ又は他の部分に付着させ、次に断片の付いたビードを抽出することによって、他の断片から分離させるのに一般に使われている。)プロセスを開始するには、最初の段階は、ロボットアームでピペット作用ヘッドを操縦して、多数のピペット先端又はツール上の他のチャネルに磁気ビードをピックアップすることを含んでいる。ビードは、液体の媒体の中に入っていて、例えば、ゲノム分離プロセスに使用するため、各ビードに固定されている所望のプライマ又は他の化合物を有している。磁気ビードのピックアップは、中央位置、例えば、液体媒体とビードを保持しているトレイ、で実行される。その後、ロボットアームは、現在のピペット作用ヘッドを支持台の上に、例えば、ヘッドが支持台の場所にある1つ又は複数のマルチウェルプレート又は他の液体試料ホルダーと関係付けられるように、置く。ピペット作用ヘッドは、支持台上でロボットアームから切り離され、ロボットアームは、次のピペット作用ヘッドをピックアップするなど、自由に他の仕事をできるようになる。しかしながら、支持台上に置かれた各ピペット作用ヘッドは、支持台上にある間に、例えば、ピペットチャネル及び/又は関係付けられたマルチウェルプレート内の、1つ又は複数の液体試料に対して液体取扱の仕事を続ける。液体試料取り扱いの仕事は、1つ又は複数の吸引、分注、混合、分離、及び/又は他の仕事を含んでおり、ツールによってロボットアームに接続されること無く実行することができる。これは、複数の液体試料に対してツールが実行するプロトコルの或るプロセスが、相当な時間を要し、及び/又はツールをロボットアームに接続しておく必要がない場合には、好都合である。而して、システムによって処理される、例えば、マルチウェルプレート又は他の試料ホルダー内に位置している、液体試料の数は、ロボットアームが利用できるツールの数によってのみ制限され、必ずしも、単一のピペット又は他のツールが試料に対して一組のプロセスを実行するのに要する時間の長さによって制限されるわけではない。本発明の各種態様で実行される液体試料取り扱いの仕事は、磁気ビード分離プロセスで実行されるこれらの動作に限定されるのではなく、あらゆる適したプロセス、例えば、ピペット作用ヘッド上で試薬先端無しで実行される蛋白質抽出プロセス、又は何らかの他の適したプロセス、に関係している。
【0005】
本発明の或る態様では、液体取り扱いプロセスを実行するための方法は、複数の別々のツールを操縦するロボット装置の使用を伴っている。第1ツールは、ロボット装置と切り離し可能に係合されており、ロボット装置は、第1ツールを操縦し、制御して、少なくとも1つの液体試料に関して少なくとも1つの液体取り扱いの仕事又は操作を実行するのに使用される。ロボット装置は、次に、第1ツールを支持台上の第1位置に位置決めするのに使用され、第1ツールは、ロボット装置から切り離され、支持台上の第1位置に留置される。第1ツールは、その後、支持台上にある間に、少なくとも1つの液体取り扱いの仕事又は操作を実行するように操作される。この様に、第1ツールは、ロボット装置に接続されている間及び接続されていない間の両方で、液体取り扱い操作を実行する。或る実施形態では、ツールは、支持台上にある間に、ツールとは別の制御器から制御信号を受け取ること無く、液体取り扱い操作を実行する。そうではなく、ツールは、その自身の制御下で液体取り扱い操作を実行する。支持台上にある間は、ツールに動力を供給してもしなくてもよい。
【0006】
本発明の別の態様では、ロボット装置と共に使用するツールは、それぞれが液体試料に対して液体試料取り扱い操作を実行するように作られた複数のチャネルを含んでいる。ツールのインターフェースは、動力及び/又は制御信号を受け取り、また、ロボット装置がツールを操縦できるようにするため、ロボット装置と切り離し可能に係合できるように作られた連結器を含んでいる。ツールは、更に、複数のチャネルの作用を、例えば、ツールの1つ又は複数の部分を動かして、液体がチャネルに流れ込むように制御することによって、制御するツール制御器を有している。ツールは、連結器でロボット装置に係合されているときに液体試料取り扱い操作を実行し、且つ、ロボット装置から分離されて支持台上に留置されているときも、液体試料取り扱い操作を実行するように作られている。
【0007】
本発明の別の態様では、複数の液体試料に対して液体取り扱いプロセスを実行するためのシステムは、作業区域内でツールを操縦するように作られていて、ツールと切り離し可能に係合させるための連結器を含んでいるロボット装置を含んでいる。ロボット装置とは別の支持台は、少なくとも1つのツールと、そのツールがロボット装置から切り離されたときに、係合させるために設けられている。複数のツールが、ロボット装置で使用するために設けられており、各ツールは、それぞれが液体試料に対して液体試料取り扱い操作を実行するように作られている複数のチャネルを含んでいる。このツールは、更に、動力及び/又は制御信号を受け取るインターフェースを含んでおり、インターフェースは、ロボット装置がツールを操縦できるようにするため、ロボット装置と切り離し可能に係合できるように作られた連結器を含んでいる。各ツール上の制御器は、複数のチャネルの作動を制御するので、ツールは、連結器でロボット装置に係合されているときに液体試料取り扱い操作を実行し、且つ、支持台上に留置されているときも、液体試料取り扱い操作を実行するように作られている。
[形態1]
複数の別々のツールを操縦するロボット装置の使用を伴う、液体取り扱いプロセスを実行するための方法において、
第1ツールを前記ロボット装置と切り離し可能に係合させる段階と、
前記ロボット装置を使用して、前記第1ツールを操縦し制御し、少なくとも1つの液体取り扱い操作を少なくとも1つの液体試料に対して実行する段階と、
前記ロボット装置を使用して、前記第1ツールを支持台上の第1位置に位置決めする段階と、
前記第1ツールを前記ロボット装置から切り離し、前記第1ツールを前記支持台上の前記第1位置に留置する段階と、
前記第1ツールを操作して、前記支持台上にある間に、少なくとも1つの液体取り扱い操作を実行する段階と、から成る方法。
[形態2]
前記第1ツールは、複数のピペットチャネルを含んでおり、前記支持台上で前記第1ツールによって実行される前記少なくとも1つの液体取り扱い操作は、前記複数のピペットチャネルの少なくとも1つに流体の流れを引き起こす段階を含んでいる、形態1に記載の方法。
[形態3]
前記第1ツールは、複数のピペットチャネルを含んでおり、前記ロボット装置に係合されたときに前記第1ツールによって実行される前記少なくとも1つの液体取り扱い操作は、前記複数のピペットチャネルの少なくとも1つに流体の流れを引き起こす段階を含んでいる、形態1に記載の方法。
[形態4]
前記第1ツールは、マルチウェルプレート内のウェルと相互作用するように配置されている複数のピペットチャネルを含んでいる、形態1に記載の方法。
[形態5]
前記ロボット装置は、SCARA型ロボット装置である、形態1に記載の方法。
[形態6]
少なくとも1つの液体取り扱い操作を少なくとも1つの液体試料に対して実行するように作られている第2ツールを更に備えており、前記方法は、更に、
前記ロボット装置を使用して、前記第2ツールを操縦し制御し、前記第1ツールが前記支持台上にある間に少なくとも1つの液体取り扱い操作を実行している間に、少なくとも1つの液体取り扱い操作を少なくとも1つの液体試料に対して実行する段階を含んでいる、形態1に記載の方法。
[形態7]
前記第1ツールは、支持台上にある間に、動力及び/又は制御信号を受け取る、形態1に記載の方法。
[形態8]
前記少なくとも1つの液体取り扱い操作は、液体試料を吸引すること、液体試料を分注すること、液体試料を前記第1ツールのチャネル内で攪拌すること、2つの物質を前記第1ツールのチャネルで一体に混合すること、液体試料の分析を実行すること、及び/又は液体試料の成分を分離すること、を含んでいる、形態1に記載の方法。
[形態9]
前記第1ツールは、前記支持台上にある間に、システム制御器から制御信号を受け取ること無く、少なくとも1つの液体取り扱い操作を実行する、形態1に記載の方法。
[形態10]
前記第1ツールによって前記支持台上にある間に実行される前記少なくとも1つの液体取り扱い操作は、少なくとも1つの磁気ビードを含んでいる液体試料に対して実行される、形態1に記載の方法。
[形態11]
ロボット装置で使用するためのツールにおいて、
それぞれが液体試料取り扱い操作を液体試料に対して実行するように作られている複数のチャネルと、
動力及び/又は制御信号を受け取るツールインターフェースであって、ロボット装置と切り離し可能に係合して前記ロボット装置が前記ツールを操縦できるようにするように作られている連結器を含んでいる、ツールインターフェースと、
前記複数のチャネルの作動を制御するツール制御器と、を備えており、
前記ツールは、前記ロボット装置と前記連結器で係合されている時は、前記液体試料取り扱い操作を実行し、前記ロボット装置とは別の支持台上に置かれている時は、前記液体試料取り扱い操作を実行するように作られている、ツール。
[形態12]
前記ツールは、前記支持台上にある時は、前記ツールとは別の制御器からの制御信号無しに、前記液体試料取り扱い操作を実行するように作られている、形態11に記載のツール。
[形態13]
前記ツールによって前記支持台上にある間に実行される前記少なくとも1つの液体試料取り扱い操作は、少なくとも1つの磁気ビードを含んでいる液体試料に対して実行される、形態11に記載のツール。
[形態14]
前記複数のチャネルは、マルチウェルプレート内のウェルと相互作用するように配置されている、形態11に記載のツール。
[形態15]
複数の別々のツールを操縦するロボット装置と、1つ又は複数のツールを受け取る支持台とを含んでいる、液体取り扱いプロセスを実行するためのシステムにおいて、形態11に記載の少なくとも1つのツールを備えている、システム。
[形態16]
複数の液体試料で液体取り扱いプロセスを実行するためのシステムにおいて、
ツールを作業区域内で操縦するように作られているロボット装置であって、前記ツールと切り離し可能に係合するための連結器を含んでいる、ロボット装置と、
少なくとも1つのツールと係合できるように作られている支持台であって、前記ロボット装置とは別の、支持台と、
前記ロボット装置で使用するための複数のツールであって、各ツールは、
それぞれが液体試料取り扱い操作を液体試料に対して実行するように作られている複数のチャネルと、
動力及び/又は制御信号を受け取るツールインターフェースであって、前記ロボット装置と切り離し可能に係合して前記ロボット装置が前記ツールを操縦できるようにするように作られている連結器を含んでいる、ツールインターフェースと、
前記複数のチャネルの作動を制御するツール制御器と、を備えている複数のツールと、を備えており、
前記ツールは、前記ロボット装置と前記連結器で係合されている時は、前記液体試料取り扱い操作を実行し、前記支持台上に置かれている時は、前記液体試料取り扱い操作を実行するように作られている、システム。
[形態17]
前記ロボット装置はSCARA型ロボット装置である、形態16に記載のシステム。
[形態18]
前記複数のツールは、第1及び第2のツールを含んでおり、前記ロボット装置は、前記第2ツールを操縦し制御し、前記第1ツールが前記支持台上にある間に少なくとも1つの液体取り扱い操作を実行している間に、少なくとも1つの液体取り扱い操作を少なくとも1つの液体試料に対して実行する、形態16に記載のシステム。
[形態19]
前記液体試料取り扱い操作は、液体試料を吸引すること、液体試料を分注すること、液体試料を前記ツールのチャネル内で攪拌すること、2つの物質を前記ツールのチャネルで一体に混合すること、液体試料の分析を実行すること、及び/又は液体試料の成分を分離すること、を含んでいる、形態16に記載のシステム。
[形態20]
ツールによって前記支持台上にある間に実行される前記液体試料取り扱い操作は、少なくとも1つの磁気ビードを含んでいる液体試料に対して実行される、形態16に記載のシステム。
【0008】
本発明の上記及びその他の態様は、以下の詳細な説明及び特許請求の範囲から明らかになるであろう。
【図面の簡単な説明】
【0009】
【図1】本発明の態様による、少なくとも1つのロボットアームと、複数の液体取り扱いツールとを有する液体取り扱いシステムの斜視図である。
【実施例】
【0010】
本発明の態様について添付図面を参照しながら説明する。
本発明は、その適用が、以下の説明に述べ又は図面に示す各構成要素の構造及び配置の詳細に限定されるものではない。本発明は、他の実施形態を取ることもでき、様々なやり方で実行又は実施することができる。例えば、本発明の例示的実施形態を、液体取り扱い環境で使用することに関して以下に説明する。しかしながら、本発明の態様は、あらゆる適した用途に対するロボットシステムで使用することができるものと理解されたい。
【0011】
図1は、ロボット装置2を含む液体試料取り扱いシステム1の例示的実施形態を示している。ロボット装置2には、直角座標ロボット、SCARA−型ロボット、及び/又は、適した数の自由度を有するあらゆる形式のロボットが含まれる。この例示的実施形態では、ロボット装置2は、SCARA−型ロボット(2006年1月25日出願の米国特許出願第11/339,036号に記載されているようなロボットであり、同出願を参考文献としてここに援用する)であり、軸23の周りに回転させることができ、且つ軸23に沿ってターンテーブル24に対して直線状に動かすことができ、又それ自身を軸25の周りに回転させることができるアーム22を含んでいる。ロボット装置2は、2つ又はそれ以上のツール3を、支持台4に対して、ピックアップし又は落とすことができるように作られており、ツールとは、例えば、把持ツール(例えば、マルチウェルプレート又は他の試料ホルダを持ち上げて置くためのツール)、試料ホルダ内の液体試料の光学的又はその他の分析を実行するためのツール、及び/又は他の液体試料取り扱いの仕事又は操作を実行するためのツールである。ロボット装置2は、装置2をツール3と切り離し可能に係合させることができるようにする連結器21を含んでおり、ツール3それ自身も対応する連結器31を有している。連結器21と31は、ロボット装置2とツール3の間を機械的に係合するだけでなく、電気的、光学的、空圧的、油圧的、及び/又は他の結合も提供して、動力及び/又は制御信号をツール3に提供する。ツール3に提供される動力及び/又は制御信号は、システム制御器5で生成されるが、制御器5は、ロボット装置2及び/又はシステム1の他の部分の作動を制御する機能も有している。ツール3に提供される制御信号は、どの様な形態でもよく、ツール3がどの様に動作するものでもよい。例えば、システム制御器5は、明示的な制御命令を定義する低レベルの制御信号をツール3に提供してもよい。代わりに、又は追加して、システム制御器5は、ツール3上のツール制御器32に高レベルの命令を提供し、ツール制御器32が、高レベルの命令をデコードし、ツール3の1つ又は複数の部分のために低レベルの制御信号を生成して、システム制御器5に要求された機能を実行するようにしてもよい。或る実施形態では、ツール制御器32は、システム制御器5が提供した命令を記憶し、記憶した命令を使って、後で、ロボット装置2から切り離されている間に、液体試料取り扱い操作を実行する。例えば、システム制御器5は、ツール制御器32に、ツール3が保持している液体試料に対する1つ又は複数の仕事を、ツール3がロボット装置2から切り離されたら実行するように、命令を提供してもよい。ツール3は、更に、システム制御器5に、例えば、位置のフィードバック、関係付けられた液体試料又は一組の試料の処理状態、及び/又は他の情報に関する情報を送ってもよい。ツール3とシステム制御器5の間の通信は、有線及び/又は無線接続を介してもよく、例えば、ツール3は、ロボット装置2から切り離され支持台4上にある間は、システム制御器5と無線通信するようにしてもよい。
【0012】
支持台4は、1つ又は複数のツール3と係合させるため、どの様な適したやり方で整えてもよい。この例示の実施形態では、支持台4は、テーブルの形状をしていて、ツールの一部を支持台4の下へ試料ホルダ6に向けて伸張させられるように開口が設けられている装置として示されている。しかしながら、支持台4は、他のどの様な適したやり方で整えてもよいものと理解されたい。例えば、ツール3は、支持台4として働く、開口の無い平坦な水平面の上又は下に置いてもよい。代わりに、支持台4は、ツール3が係合される垂直面を含んでいてもよい。別の実施形態では、支持台4は、ツール3と係合するフレーム、1つ又は複数の横木、棒、及び/又は他の構造を含んでいてもよい。要するに、支持台4は、適していればどの様な配置になっていてもよい。
【0013】
支持台4に接続されている間、2つ又はそれ以上のツール3は、動力(電気、空圧他)及び/又は制御信号を、支持台4との接続を介して受け取る。ツール3と支持台4の間の接続は、ツールがロボット装置2に取り付けられるときにロボット装置2とツール3の間に使われたのと同じ接続インターフェース(例えば、連結器31)を使って確立してもよいし、ツールインターフェースの一部である別の接続装置を使って確立してもよい。この様にして、ツール3は、支持台4の上に載せられ、ロボット装置2から切り離されている間に、1つ又は複数の液体試料取り扱いの仕事を実行する。支持台4の上にある間、ツール3は、マルチウェルプレートなどの様な1つ又は複数の試料ホルダ6と関係付けられ、試料ホルダ6に対して試料取り扱いの仕事を実行する。先に論じたように、ツール3は、支持台4の上にある間に、記憶していた制御命令を使って、及び/又はシステム制御器5から受け取るリアルタイムの命令に基づいて、試料取り扱いの仕事を実行する。ツール3は、システム制御器5に、例えば、現在実行している仕事、資料処理状態などを示す情報を送る。ツール3の実行する液体取り扱いの仕事を幾つか挙げると、吸引、分注、混合、試料分析、ピペット先端又は他のチャネルを、試料ホルダ6などのウェルに向けて、及びウェルから離れる方向に伸張させること、が含まれる。ツール3は、マルチウェルプレート又は他の試料ホルダ装置内のウェルに対してそれぞれ作動する、複数のピペット先端又は他のチャネルを有している。各ピペット先端又は他のチャネルは、特定の仕事を実行するようツール3によって個別に制御される。この様に、ツール3上の1つのピペット先端、毛細管、又は他のチャネルは、マルチウェルプレート又は他の試料ホルダ6の対応するウェルに対して吸引又は分注をするよう個別に制御される。代わりに、複数のピペット先端、又は他のチャネルを、液体試料取り扱いの仕事を実行する際に一体で作業するように制御してもよい。
【0014】
或る場合には、ツール3は、把持及び液体試料取り扱い操作、又は何らかの他の適した組み合わせの様な、複数の異なる仕事を実行することもできる。ここで言う「液体試料取り扱いの仕事又は操作」は、少なくとも、液体試料を吸引すること、液体試料を分注すること、液体試料をツールのチャネル内で攪拌すること、2つの物質をツールのチャネル内で一体に混合すること、液体試料の分析を実行すること、及び/又は液体試料の成分を分離すること、を含んでいる。ツール3が複数の試料ホルダ6に対して操作を実行する場合は、試料ホルダ6は、ツール3が支持台4の上にあるときにツール3に対して、例えば、コンベヤベルト、ロボット装置2又は他の装置で動かされる。代わりに、例えば、幾つかの異なる支持台4がある場合は、ツール3を試料ホルダ6に対して動かしてもよいし、及び/又は、ツール3を1つの支持台4上の異なる場所に動かして、液体試料取り扱い操作を実行してもよい。
【0015】
上記配置及び同様な構成を使用すれば、ロボット装置2とシステム制御器5は、ロボット装置2を効率的に使用して、可能なときには何時でも、マルチウェルプレート又は他の試料ホルダ内の試料の処理を、複数のツール3で、ツールがロボット装置2から切り離されている間に実行するというやり方で、ツール3を多重化することができる。この配置を使用すれば、システム1は、ツール3を支持台4上で動かして、ツール3に、1つ又は複数の試料ホルダ6を、試料ホルダ6を動かす必要無しに処理させることができる。この様に、システム1は、例えば、各ツール3がそれぞれ特定のプロセスを実行するよう特別に作られている場合は、異なるツール3を使用して、試料ホルダ6に対して異なるプロセスを実行することができる。代わりに、試料ホルダ6を、支持台4上に静的に止まっているツール3に対して動かしてもよい。例えば、試料ホルダ6を、コンベヤで、ロボット2で、又は他の他の装置で、支持台4に搭載されているツール3に対して動かしてもよい。ツールは、必要に応じて取り換えて支持台4から外してもよく、例えば、或るツールを、支持台4から処理位置で取り外し、支持台4上の洗浄位置に移動させ、ピペット先端又は他のチャネルをツール上で洗浄し、ツール3を後で使用するのに備えた状態にすることもできる。ツール3は、洗浄されている間、処理位置では、既に洗浄を完了し使用の準備が整っていた別のツール3に置き換えられている。
【0016】
或る例示的実施形態では、システム1は、幾つかのマルチウェルプレートに保持されている液体試料に対して磁気ビード分離プロセスを実行するために使用される。ロボット装置2は、自由に使える幾つかのツールを有しており、各ツール3をピックアップして、ツールが(溶液内の)磁気ビードを、又は中央貯蔵トレイから他の物質を吸引できるようにする。その後、ロボット装置2は、各ツール3を支持台4の上に置き、ツール3は、1つ又は複数の仕事を、1組の1つ又はそれ以上のマルチウェルプレート6に対して、支持台4で実行する。例えば、ツール3は、プレート6の1つ又は複数のウェルから(ゲノム断片の入っている)液体試料を吸引し、プレートからの試料を、先に吸引した磁気ビードと混合する。ゲノム断片と磁気ビードは、例えば、ツール3のチャネルから繰り返して吸引及び/又は分注することによって、混合される。その様な処理は、例えば、ビードが液体試料と混合され、所望の核酸断片がビードに付着できるようになる間に、時間を要する。而して、ツール3は、支持台4の上にある間は装置2から切り離され、装置2が、他のツール3を同様な処理に向けて準備するという様な他の仕事を実行している間に、液体試料取り扱いの仕事を実行することができる。ツール3がマルチウェルプレートの処理を完了したら、ロボット装置2は、ツール3をピックアップし、それを、他のプレートを処理するのに使用し、及び/又は、そのマルチウェルプレートを取り外し、ツール3で処理するのに備えて他のプレートを提供する。
【0017】
支持台4の上にある間にツール3によって実行される他の処理操作は、当業者には想起できるであろう。例えば、ツール3は、マルチウェルプレートから液体試料を吸引するように、ロボット装置2によって操縦される。その後、ツール3は、支持台4の上に置かれ、ツール3は、吸引した試料の一部を1つ又は複数のマルチウェルプレートのウェルに分注し、例えば、吸引した試料を、PCR又は他のプロセスをプレート上で実行する前に、他のマルチウェルプレート内の物質と組み合わせる。
【0018】
システム制御器5及び/又はツール制御器32は、所望の入力/出力及び/又は他の機能を実行するために、どの様な適した装置及び/又は構成要素を含んでいてもよい。例えば、制御器は、汎用コンピュータ、コンピュータのネットワーク、マイクロプロセッサ、及び/又は他のデータ処理装置の様な、どの様な適したプログラム可能な計算装置を含んでいてもよい。制御器は、更に、必要に応じて、どの様な適した揮発性及び/又は不揮発性メモリ、通信装置、配線及び/又はインターフェース、モーター、ドライバ、スイッチ、リレー、センサー又は他のフィードバック装置、及び/又は他の構成要素を含んでいてもよい。制御器は、少なくとも部分的には、計算装置によって実行されると制御器が所望の機能を実行する、どの様な適したソフトウェア又は他の命令を使って実装してもよい。制御器は、ディスプレイ、プッシュボタン、グラフィカルユーザーインターフェース、キーボード、及び/又は他の入力装置などの様な、適したユーザーインターフェースを含んでいてもよい。
【0019】
以上、本発明の幾つかの態様を説明してきたが、様々な変更、修正及び改善が当業者には想起さるであろうことを理解されたい。その様な変更、修正及び改善は、本開示の一部を成し、本発明の精神及び範囲に含まれるものと考えている。この様に、以上の説明と添付図面は、例証を目的としており、本発明に何ら制限を課すものではない。
【符号の説明】
【0020】
1 システム
2 ロボット装置
3 ツール
4 支持台
5 システム制御器
6 試料ホルダ
【特許請求の範囲】
【請求項1】
複数の別々のツールを操縦するロボット装置の使用を伴う、液体取り扱いプロセスを実行するための方法において、
第1ツールを前記ロボット装置と切り離し可能に係合させる段階と、
前記ロボット装置を使用して、前記第1ツールを操縦し制御し、少なくとも1つの液体取り扱い操作を少なくとも1つの液体試料に対して実行する段階と、
前記ロボット装置を使用して、前記第1ツールを支持台上の第1位置に位置決めする段階と、
前記第1ツールを前記ロボット装置から切り離し、前記第1ツールを前記支持台上の前記第1位置に留置する段階と、
前記第1ツールを操作して、前記支持台上にある間に、少なくとも1つの液体取り扱い操作を実行する段階とを含んでおり、
前記第1ツールが前記支持台の上にある間に、試料ホルダを前記第1ツールに対して動かす段階であって、前記第1ツールが前記試料ホルダとともに前記少なくとも1つの液体取り扱い操作を実行する、動かす段階を更に含んでいる、方法。
【請求項2】
前記第1ツールは、複数のピペットチャネルを含んでおり、前記支持台上で前記第1ツールによって実行される前記少なくとも1つの液体取り扱い操作は、前記複数のピペットチャネルの少なくとも1つに流体の流れを引き起こす段階を含んでいる、請求項1に記載の方法。
【請求項3】
前記第1ツールは、複数のピペットチャネルを含んでおり、前記ロボット装置に係合されたときに前記第1ツールによって実行される前記少なくとも1つの液体取り扱い操作は、前記複数のピペットチャネルの少なくとも1つに流体の流れを引き起こす段階を含んでいる、請求請求項1に記載の方法。
【請求項4】
前記第1ツールは、マルチウェルプレート内のウェルと相互作用するように配置されている複数のピペットチャネルを含んでいる、請求項1に記載の方法。
【請求項5】
前記ロボット装置は、SCARA型ロボット装置である、請求項1に記載の方法。
【請求項6】
少なくとも1つの液体取り扱い操作を少なくとも1つの液体試料に対して実行するように作られている第2ツールを更に備えており、前記方法は、更に、
前記ロボット装置を使用して、前記第2ツールを操縦し制御し、前記第1ツールが前記支持台上にある間に少なくとも1つの液体取り扱い操作を実行している間に、少なくとも1つの液体取り扱い操作を少なくとも1つの液体試料に対して実行する段階を含んでいる、請求項1に記載の方法。
【請求項7】
前記第1ツールは、支持台上にある間に、動力及び/又は制御信号を受け取る、請求項1に記載の方法。
【請求項8】
前記少なくとも1つの液体取り扱い操作は、液体試料を吸引すること、液体試料を分注すること、液体試料を前記第1ツールのチャネル内で攪拌すること、2つの物質を前記第1ツールのチャネルで一体に混合すること、液体試料の分析を実行すること、及び/又は液体試料の成分を分離すること、を含んでいる、請求項1に記載の方法。
【請求項9】
前記第1ツールは、前記支持台上にある間に、システム制御器から制御信号を受け取ること無く、少なくとも1つの液体取り扱い操作を実行する、請求項1に記載の方法。
【請求項10】
前記第1ツールによって前記支持台上にある間に実行される前記少なくとも1つの液体取り扱い操作は、少なくとも1つの磁気ビードを含んでいる液体試料に対して実行される、請求項1に記載の方法。
【請求項11】
システム制御器から前記第1ツールへ命令を提供する段階と、
前記第1ツールの一部であるツール制御器において、前記命令を記憶する段階と、
前記第1ツールが前記ロボット装置から切り離されて前記支持台の上にある間に、記憶された前記命令に従い、前記第1ツールを操作して少なくとも1つの液体取り扱い操作を実行する段階を更に含んでいる、請求項1に記載の方法。
【請求項12】
前記試料ホルダを前記第1ツールに対して動かす段階が、コンベヤベルトによって実行される、請求項1に記載の方法。
【請求項13】
ロボット装置で使用するためのツールにおいて、
それぞれが液体試料取り扱い操作を液体試料に対して実行するように作られている複数のチャネルと、
動力及び/又は制御信号を受け取るツールインターフェースであって、ロボット装置と切り離し可能に係合して前記ロボット装置が前記ツールを操縦できるようにするように作られている連結器を含んでいる、ツールインターフェースと、
前記複数のチャネルの作動を制御するツール制御器と、を備えており、
前記ツールは、前記ロボット装置と前記連結器で係合されている時は、前記液体試料取り扱い操作を実行し、前記ロボット装置とは別の支持台上に置かれている時は、前記液体試料取り扱い操作を実行するように作られており、
前記ツールが前記支持台の上にある間に、試料ホルダを前記ツールに対して動かし、前記ツールが前記試料ホルダとともに前記液体取り扱い操作を実行する、ツール。
【請求項14】
前記ツールは、前記支持台上にある時は、前記ツールとは別の制御器からの制御信号無しに、前記液体試料取り扱い操作を実行するように作られている、請求項13に記載のツール。
【請求項15】
前記ツールによって前記支持台上にある間に実行される前記少なくとも1つの液体試料取り扱い操作は、少なくとも1つの磁気ビードを含んでいる液体試料に対して実行される、請求項13に記載のツール。
【請求項16】
複数の液体試料で液体取り扱いプロセスを実行するためのシステムにおいて、
ツールを作業区域内で操縦するように作られているロボット装置であって、前記ツールと切り離し可能に係合するための連結器を含んでいる、ロボット装置と、
少なくとも1つのツールと係合できるように作られている支持台であって、前記ロボット装置とは別の、支持台と、
前記ロボット装置で使用するための複数のツールであって、各ツールは、
それぞれが液体試料取り扱い操作を液体試料に対して実行するように作られている複数のチャネルと、
動力及び/又は制御信号を受け取るツールインターフェースであって、前記ロボット装置と切り離し可能に係合して前記ロボット装置が前記ツールを操縦できるようにするように作られている連結器を含んでいる、ツールインターフェースと、
前記複数のチャネルの作動を制御するツール制御器と、を備えている複数のツールと、を備えており、
前記ツールは、前記ロボット装置と前記連結器で係合されている時は、前記液体試料取り扱い操作を実行し、前記支持台上に置かれている時は、前記液体試料取り扱い操作を実行するように作られており、
前記ツールが前記支持台の上にある間に、コンベヤベルトによって試料ホルダを前記ツールに対して動かし、前記ツールが前記試料ホルダとともに前記液体取り扱い操作を実行する、システム。
【請求項17】
前記ロボット装置はSCARA型ロボット装置である、請求項16に記載のシステム。
【請求項18】
前記複数のツールは、第1及び第2のツールを含んでおり、前記ロボット装置は、前記第2ツールを操縦し制御し、前記第1ツールが前記支持台上にある間に少なくとも1つの液体取り扱い操作を実行している間に、少なくとも1つの液体取り扱い操作を少なくとも1つの液体試料に対して実行する、請求項16に記載のシステム。
【請求項19】
前記液体試料取り扱い操作は、液体試料を吸引すること、液体試料を分注すること、液体試料を前記ツールのチャネル内で攪拌すること、2つの物質を前記ツールのチャネルで一体に混合すること、液体試料の分析を実行すること、及び/又は液体試料の成分を分離すること、を含んでいる、請求項16に記載のシステム。
【請求項1】
複数の別々のツールを操縦するロボット装置の使用を伴う、液体取り扱いプロセスを実行するための方法において、
第1ツールを前記ロボット装置と切り離し可能に係合させる段階と、
前記ロボット装置を使用して、前記第1ツールを操縦し制御し、少なくとも1つの液体取り扱い操作を少なくとも1つの液体試料に対して実行する段階と、
前記ロボット装置を使用して、前記第1ツールを支持台上の第1位置に位置決めする段階と、
前記第1ツールを前記ロボット装置から切り離し、前記第1ツールを前記支持台上の前記第1位置に留置する段階と、
前記第1ツールを操作して、前記支持台上にある間に、少なくとも1つの液体取り扱い操作を実行する段階とを含んでおり、
前記第1ツールが前記支持台の上にある間に、試料ホルダを前記第1ツールに対して動かす段階であって、前記第1ツールが前記試料ホルダとともに前記少なくとも1つの液体取り扱い操作を実行する、動かす段階を更に含んでいる、方法。
【請求項2】
前記第1ツールは、複数のピペットチャネルを含んでおり、前記支持台上で前記第1ツールによって実行される前記少なくとも1つの液体取り扱い操作は、前記複数のピペットチャネルの少なくとも1つに流体の流れを引き起こす段階を含んでいる、請求項1に記載の方法。
【請求項3】
前記第1ツールは、複数のピペットチャネルを含んでおり、前記ロボット装置に係合されたときに前記第1ツールによって実行される前記少なくとも1つの液体取り扱い操作は、前記複数のピペットチャネルの少なくとも1つに流体の流れを引き起こす段階を含んでいる、請求請求項1に記載の方法。
【請求項4】
前記第1ツールは、マルチウェルプレート内のウェルと相互作用するように配置されている複数のピペットチャネルを含んでいる、請求項1に記載の方法。
【請求項5】
前記ロボット装置は、SCARA型ロボット装置である、請求項1に記載の方法。
【請求項6】
少なくとも1つの液体取り扱い操作を少なくとも1つの液体試料に対して実行するように作られている第2ツールを更に備えており、前記方法は、更に、
前記ロボット装置を使用して、前記第2ツールを操縦し制御し、前記第1ツールが前記支持台上にある間に少なくとも1つの液体取り扱い操作を実行している間に、少なくとも1つの液体取り扱い操作を少なくとも1つの液体試料に対して実行する段階を含んでいる、請求項1に記載の方法。
【請求項7】
前記第1ツールは、支持台上にある間に、動力及び/又は制御信号を受け取る、請求項1に記載の方法。
【請求項8】
前記少なくとも1つの液体取り扱い操作は、液体試料を吸引すること、液体試料を分注すること、液体試料を前記第1ツールのチャネル内で攪拌すること、2つの物質を前記第1ツールのチャネルで一体に混合すること、液体試料の分析を実行すること、及び/又は液体試料の成分を分離すること、を含んでいる、請求項1に記載の方法。
【請求項9】
前記第1ツールは、前記支持台上にある間に、システム制御器から制御信号を受け取ること無く、少なくとも1つの液体取り扱い操作を実行する、請求項1に記載の方法。
【請求項10】
前記第1ツールによって前記支持台上にある間に実行される前記少なくとも1つの液体取り扱い操作は、少なくとも1つの磁気ビードを含んでいる液体試料に対して実行される、請求項1に記載の方法。
【請求項11】
システム制御器から前記第1ツールへ命令を提供する段階と、
前記第1ツールの一部であるツール制御器において、前記命令を記憶する段階と、
前記第1ツールが前記ロボット装置から切り離されて前記支持台の上にある間に、記憶された前記命令に従い、前記第1ツールを操作して少なくとも1つの液体取り扱い操作を実行する段階を更に含んでいる、請求項1に記載の方法。
【請求項12】
前記試料ホルダを前記第1ツールに対して動かす段階が、コンベヤベルトによって実行される、請求項1に記載の方法。
【請求項13】
ロボット装置で使用するためのツールにおいて、
それぞれが液体試料取り扱い操作を液体試料に対して実行するように作られている複数のチャネルと、
動力及び/又は制御信号を受け取るツールインターフェースであって、ロボット装置と切り離し可能に係合して前記ロボット装置が前記ツールを操縦できるようにするように作られている連結器を含んでいる、ツールインターフェースと、
前記複数のチャネルの作動を制御するツール制御器と、を備えており、
前記ツールは、前記ロボット装置と前記連結器で係合されている時は、前記液体試料取り扱い操作を実行し、前記ロボット装置とは別の支持台上に置かれている時は、前記液体試料取り扱い操作を実行するように作られており、
前記ツールが前記支持台の上にある間に、試料ホルダを前記ツールに対して動かし、前記ツールが前記試料ホルダとともに前記液体取り扱い操作を実行する、ツール。
【請求項14】
前記ツールは、前記支持台上にある時は、前記ツールとは別の制御器からの制御信号無しに、前記液体試料取り扱い操作を実行するように作られている、請求項13に記載のツール。
【請求項15】
前記ツールによって前記支持台上にある間に実行される前記少なくとも1つの液体試料取り扱い操作は、少なくとも1つの磁気ビードを含んでいる液体試料に対して実行される、請求項13に記載のツール。
【請求項16】
複数の液体試料で液体取り扱いプロセスを実行するためのシステムにおいて、
ツールを作業区域内で操縦するように作られているロボット装置であって、前記ツールと切り離し可能に係合するための連結器を含んでいる、ロボット装置と、
少なくとも1つのツールと係合できるように作られている支持台であって、前記ロボット装置とは別の、支持台と、
前記ロボット装置で使用するための複数のツールであって、各ツールは、
それぞれが液体試料取り扱い操作を液体試料に対して実行するように作られている複数のチャネルと、
動力及び/又は制御信号を受け取るツールインターフェースであって、前記ロボット装置と切り離し可能に係合して前記ロボット装置が前記ツールを操縦できるようにするように作られている連結器を含んでいる、ツールインターフェースと、
前記複数のチャネルの作動を制御するツール制御器と、を備えている複数のツールと、を備えており、
前記ツールは、前記ロボット装置と前記連結器で係合されている時は、前記液体試料取り扱い操作を実行し、前記支持台上に置かれている時は、前記液体試料取り扱い操作を実行するように作られており、
前記ツールが前記支持台の上にある間に、コンベヤベルトによって試料ホルダを前記ツールに対して動かし、前記ツールが前記試料ホルダとともに前記液体取り扱い操作を実行する、システム。
【請求項17】
前記ロボット装置はSCARA型ロボット装置である、請求項16に記載のシステム。
【請求項18】
前記複数のツールは、第1及び第2のツールを含んでおり、前記ロボット装置は、前記第2ツールを操縦し制御し、前記第1ツールが前記支持台上にある間に少なくとも1つの液体取り扱い操作を実行している間に、少なくとも1つの液体取り扱い操作を少なくとも1つの液体試料に対して実行する、請求項16に記載のシステム。
【請求項19】
前記液体試料取り扱い操作は、液体試料を吸引すること、液体試料を分注すること、液体試料を前記ツールのチャネル内で攪拌すること、2つの物質を前記ツールのチャネルで一体に混合すること、液体試料の分析を実行すること、及び/又は液体試料の成分を分離すること、を含んでいる、請求項16に記載のシステム。
【図1】


【公開番号】特開2013−15531(P2013−15531A)
【公開日】平成25年1月24日(2013.1.24)
【国際特許分類】
【出願番号】特願2012−196233(P2012−196233)
【出願日】平成24年9月6日(2012.9.6)
【分割の表示】特願2009−507786(P2009−507786)の分割
【原出願日】平成19年4月24日(2007.4.24)
【出願人】(503220129)プロテダイン・コーポレーション (9)
【Fターム(参考)】
【公開日】平成25年1月24日(2013.1.24)
【国際特許分類】
【出願日】平成24年9月6日(2012.9.6)
【分割の表示】特願2009−507786(P2009−507786)の分割
【原出願日】平成19年4月24日(2007.4.24)
【出願人】(503220129)プロテダイン・コーポレーション (9)
【Fターム(参考)】
[ Back to top ]