
自律移動体、自己位置推定方法、地図情報作成システム
【課題】自己位置推定の精度を向上することができる自律移動体、自己位置推定方法、地図情報作成システム、及び地図情報作成方法を提供する。
【解決手段】本発明の自律移動体は、周囲の障害物までの距離に応じた距離データを測定するレーザセンサと、記移動環境の異なる測定面での2次元の推定用地図情報を複数記憶する地図情報記憶部22と、自己位置又はレーザセンサの測定角度に基づいて、地図情報記憶部22に記憶された複数の推定用地図情報の中から1つの推定用地図情報を選択する地図情報選択部26と、地図情報選択部26で選択された推定用地図情報とレーザセンサで測定された距離データとに基づいて、自己位置を推定する自己位置推定部23と、を備えた。
【解決手段】本発明の自律移動体は、周囲の障害物までの距離に応じた距離データを測定するレーザセンサと、記移動環境の異なる測定面での2次元の推定用地図情報を複数記憶する地図情報記憶部22と、自己位置又はレーザセンサの測定角度に基づいて、地図情報記憶部22に記憶された複数の推定用地図情報の中から1つの推定用地図情報を選択する地図情報選択部26と、地図情報選択部26で選択された推定用地図情報とレーザセンサで測定された距離データとに基づいて、自己位置を推定する自己位置推定部23と、を備えた。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自律移動体、自己位置推定方法、地図情報作成システム、及び地図情報作成方法に関する。
【背景技術】
【0002】
近年、建物内部や屋外の限定された領域内を、周囲の環境に基づいて自律的に移動可能な自律移動型ロボットなどの移動体が開発されつつある。このような移動体は、予め記憶された移動する領域に関する移動マップ上において、現在の自己の位置から特定の目標地点までの移動経路を作成することで自律移動を可能とするため、通常、移動する領域内における自己位置を認識する機能を備えている。このような自律移動体を制御するための自己位置推定方法が特許文献1に開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−176031号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところで、ウェルキャブ車両(車椅子で搭乗可能な自動車)では、利用者が車椅子に乗ったまま、自動車内に乗り込む。このとき、従来の車椅子では、補助者がウインチを操作したり、車椅子が車両から落ちたりしないように補助する必要がある。さらに、搭乗まで時間がかかってしまう。よって、車椅子ユーザや補助者にとって大きな負担となっている。
【0005】
そこで、本件出願人は、自律移動体を車椅子として利用して、ウェルキャブ車両に全自動で搭乗可能な機能を開発している。ウェルキャブ車両内では、シートなどの障害物が配置されている。このため、移動環境が複雑になり、自己位置推定による自律移動が困難である。しかしながら、特許文献1に記載の自己位置推定方法では、環境内に赤外線照射部を設ける必要が生じてしまう。実用上、ウェルキャブ車両内に赤外線照射部を設けることは困難である。従って、自己位置推定が正確に行うことが困難であるという問題点が生じてしまう。
【0006】
本発明は、上記の問題点に鑑みてなされたものであり、自己位置推定の精度を向上することができる自律移動体、自己位置推定方法、地図情報作成システム、及び地図情報作成方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の第1の態様にかかる自律移動体は、移動環境内の推定用地図情報に基づいて自己位置を推定して、前記移動環境内を移動する自律移動体であって、周囲の障害物までの距離に応じた距離データを測定するセンサ部と、前記移動環境内の障害物の配置に応じた2次元の推定用地図情報を複数記憶する地図情報記憶部であって、前記移動環境の異なる測定面での推定用地図情報を記憶する地図情報記憶部と、前記自己位置又は前記センサ部の測定角度に基づいて、前記地図情報記憶部に記憶された複数の推定用地図情報の中から1つの推定用地図情報を選択する地図情報選択部と、前記地図情報選択部で選択された推定用地図情報と前記センサ部で測定された距離データとに基づいて、自己位置を推定する自己位置推定部と、を備えたものである。この構成によれば、適切な推定用地図情報を選択することができるため、自己位置推定の精度を向上することができる。
【0008】
本発明の第2の態様にかかる自律移動体は、上記の自律移動体であって、前記センサ部の測定角度を測定する角度センサをさらに備え、前記地図情報記憶部が異なる角度の測定面の推定用地図情報を記憶しており、前記角度センサの測定結果に応じて、前記位置情報選択部が前記推定用地図情報を選択するものである。これにより、適切な推定用地図情報を選択することができるため、自己位置推定の精度を向上することができる。
【0009】
本発明の第3の態様にかかる自律移動体は、上記の自律移動体であって、前記自己位置推定部で推定された自己位置が所定の位置を越えたら、前記地図情報選択部が選択する推定用地図情報を切り替えるものである。これにより、適切なタイミングで推定用地図情報を切り替えることができるため、自己位置推定の精度を向上することができる。
【0010】
本発明の第4の態様にかかる自律移動体は、上記の自律移動体であって、前記移動環境内の障害物の位置に応じて、前記推定用地図情報を切り替える位置が予め設定されているものである。これにより、適切な推定用地図情報を選択することができるため、自己位置推定の精度を向上することができる。
【0011】
本発明の第5の態様にかかる自律移動体は、上記の自律移動体であって、前記推定用地図情報を切り替える時に、前記自律移動体の移動が停止することを特徴とするものである。これにより、推定用地図情報を切り替えるタイミングにおいても、自己位置推定の精度を向上することができる。
【0012】
本発明の第6の態様にかかる自律移動体は、上記の自律移動体であって、前記距離データに応じた距離画像データと、前記推定用地図情報とをパターンマッチングして、自己位置を推定するものである。これにより、自己位置を正確に推定することができる。
【0013】
本発明の第7の態様にかかる自律移動体は、移動環境内の推定用地図情報に基づいて自己位置を推定して、前記移動環境内を移動する自律移動体であって、周囲の障害物までの距離を測定するセンサ部と、前記移動環境内の障害物の配置に応じた2次元の推定用地図情報を記憶する地図情報記憶部と、前自律移動体の移動中に前記センサ部で測定された距離に基づく距離画像データを切り出して、前記推定用地図情報に合成する地図情報作成部と、前記距離画像データが合成された前記推定用地図情報と、合成した後の前記センサ部の測定結果と、に基づいて、自己位置を推定する自己位置推定部と、を備えるものである。これにより、適切な推定用地図情報を用いることができるため、自己位置推定の精度を向上することができる。
【0014】
本発明の第8の態様にかかる自律移動体は、上記の自律移動体であって、前記移動環境の一部の領域に対応して、前記距離画像データが切り出され、前記移動環境の前記一部の領域が、前記障害物の可動範囲に基づいて設定されているものである。これにより、適切に合成することができるため、自己位置推定の精度を向上することができる。
【0015】
本発明の第9の態様にかかる地図情報作成システムは、移動環境内の自己位置推定に用いられる推定用地図情報を作成する地図情報作成システムであって、所定の測定面において、前記移動環境の障害物までの距離を測定するセンサ部と、前記移動環境における前記センサ部の位置を測定する位置測定部と、前記センサ部の測定面の角度を変更する角度変更機構と、異なる角度の測定面において前記センサ部が測定した距離に応じた距離画像データを合成して、前記推定用地図情報を作成する地図情報作成部と、を備えるものである。これにより、自己位置推定に好適な推定用地図情報を作成することができるため、自己位置推定の精度を向上することができる。
【0016】
本発明の第10の態様にかかる自己位置推定方法は、移動環境内の推定用地図情報に基づいて自己位置を推定する移動体における自己位置推定方法であって、周囲の障害物までの距離に応じた距離データを測定するステップと、前記移動環境内の障害物の配置に応じた2次元の推定用地図情報が異なる測定面毎に記憶された地図情報記憶部から、前記移動体の位置又は姿勢に基づいて、1つの推定用地図情報を選択するステップと、選択された前記推定用地図情報と、前記距離データと、に基づいて自己位置を推定するステップと、を備えるものである。これにより、適切な推定用地図情報を選択することができるため、自己位置推定の精度を向上することができる。
【0017】
本発明の第11の態様にかかる自己位置推定方法は、上記の自己位置推定方法であって、前記距離データを測定するセンサ部の測定角度を測定するステップをさらに備え、前記地図情報記憶部が異なる角度の測定面の推定用地図情報を記憶しており、前記測定角度に応じて、前記推定用地図情報を選択するものである。これにより、適切な推定用地図情報を選択することができるため、自己位置推定の精度を向上することができる。
【0018】
本発明の第12の態様にかかる自己位置推定方法は、上記の自己位置推定方法であって、推定された前記自己位置が、所定の位置を越えたら、別の推定用地図情報に切り替えるものである。これにより、適切な推定用地図情報を選択することができるため、自己位置推定の精度を向上することができる。
【0019】
本発明の第13の態様にかかる自己位置推定方法は、上記の自己位置推定方法であって、 前記移動環境内の障害物の位置に応じて、前記推定用地図情報を切り替える位置が予め設定されているものである。これにより、適切なタイミングで推定用地図情報を切り替えることができるため、自己位置推定の精度を向上することができる。
【0020】
本発明の第14の態様にかかる自己位置推定方法は、上記の自己位置推定方法であって、前記推定用地図情報を切り替える時に、前記自律移動体の移動が停止することを特徴とするものである。これにより、推定用地図情報を切り替えるタイミングにおいても、自己位置推定の精度を向上することができる。
【0021】
本発明の第15の態様にかかる自己位置推定方法は、上記の自己位置推定方法であって、前記距離データに応じた距離画像データと、前記推定用地図情報とをパターンマッチングして、自己位置を推定するものである。これにより、自己位置推定の精度を向上することができる。
【0022】
本発明の第16の態様にかかる自己位置推定方法は、移動環境内の推定用地図情報に基づいて自己位置を推定する移動体における自己位置推定方法であって、周囲の障害物までの距離を測定するステップと、前記自律移動体の移動中に前記センサ部で測定された距離に基づく距離画像データを切り出して、推定用地図情報に合成するステップと、前記距離画像データが合成された前記推定用地図情報と、合成した後の前記センサ部の測定結果とに基づいて、自己位置を推定するステップと、を備えるものである。これにより、適切な推定用地図情報を用いることができるため、自己位置推定の精度を向上することができる。
【0023】
本発明の第17の態様にかかる自己位置推定方法は、上記の自己位置推定方法であって、前記移動環境の一部の領域に対応して、前記距離画像データが切り出され、前記移動環境の前記一部の領域が、前記障害物の可動範囲に基づいて設定されているものである。これにより、適切に合成することができるため、自己位置推定の精度を向上することができる。
【0024】
本発明の第18の態様にかかる地図情報作成方法は、移動環境内の自己位置推定に用いられる推定用地図情報を作成する地図情報作成方法であって、所定の測定面において、前記移動環境の障害物までの距離を測定するステップと、前記移動環境における前記センサ部の位置を測定するステップと、前記センサ部の測定面の角度を変更するステップと、異なる角度の測定面において前記センサ部が測定した距離に応じた距離画像データを合成して、推定用地図情報を作成するステップと、を備えるものである。これにより、自己位置推定に好適な推定用地図情報を作成することができるため、自己位置推定の精度を向上することができる。
【発明の効果】
【0025】
本発明によれば、自己位置推定の精度を向上することができる自律移動体、自己位置推定方法、地図情報作成システム、及び地図情報作成方法を提供することを提供することができる。
【図面の簡単な説明】
【0026】
【図1】本発明にかかるロボットの全体構成を模式的に示す図である。
【図2】本発明にかかるロボットが車両に進入する様子を示す上面図である。
【図3】本発明にかかるロボットが車両に進入する様子を示す側面図である。
【図4】本発明にかかるロボットの自己位置推定に用いられる推定用地図情報を示す図である。
【図5】本発明にかかる移動体の制御部の構成を示すブロック図である。
【図6】実施の形態1にかかる地図情報作成システムを示す図である。
【図7】実施の形態1にかかる地図情報作成システムによって作成された推定用地図情報を模式的に示す図である。
【図8】実施の形態1にかかる地図情報作成方法を示すフローチャートである。
【図9】車両を移動するロボットによる自己位置推定を説明する図である。
【図10】実施の形態2にかかるロボットにおける推定用地図情報の切り替えを説明する図である。
【図11】実施の形態2にかかる自己位置推定方法を示すフローチャートである。
【図12】車両を移動するロボットによる自己位置推定を説明する図である。
【図13】実施の形態3にかかるロボットが、推定用地図情報を取得している様子を示す図である。
【図14】実施の形態3にかかるロボットが、推定用地図情報を読み出す様子を説明する図である。
【図15】実施の形態3にかかる自己位置推定方法を示すフローチャートである。
【図16】実施の形態3にかかる自己位置推定方法において、推定用地図情報を切り替えるフローを示すフローチャートである。
【図17】実施の形態4にかかるロボットの自己位置推定に用いられる推定用地図情報を示す図である。
【図18】実施の形態4にかかるロボットの自己位置推定で作成された推定用地図情報を示す図である。
【図19】実施の形態4にかかる自己位置推定方法を示すフローチャートである。
【図20】実施の形態4にかかる自己位置推定方法において、地図情報を作成するフローを示すフローチャートである。
【発明を実施するための形態】
【0027】
以下、本発明に係る移動体の実施形態を、図面に基づいて詳細に説明する。但し、本発明が以下の実施形態に限定される訳ではない。また、説明を明確にするため、以下の記載及び図面は、適宜、簡略化されている。
【0028】
まず、本発明に係る移動体の一例であるロボットの構成について、図1を用いて説明する。図1はロボット1の構成を模式的に示す側面図である。本実施の形態では、ロボット1が、移動環境内を自己位置推定しながら、自律移動する自律移動体として説明する。ここでは、ロボット1が ウェルキャブ車両内を移動するものとして説明する。もちろん、移動環境は、ウェルキャブ車両に限られるものではない。
【0029】
ロボット1は、本体10と、前輪11と、後輪12と、レーザセンサ13と、レーザセンサ14と、角度変更機構15と、制御部16と、ジャイロセンサ17とを備えている。前輪11と、後輪12は、本体10に対して回転可能に取り付けられている。また、前輪11と後輪12は、例えば、モータによって回転する。例えば、前輪11と後輪12を前方の回転することで前進し、後方に回転することで後退する。さらに、前輪11が左右両側に設けられている場合、左右の回転数を変えることで、左右に旋回する。なお、車輪の数は特に限定されるものではなく、2輪、3輪、4輪、あるいはそれ以上の数の車輪を有していても良い。
【0030】
レーザセンサ13、14は、所定の測定面において、周囲の障害物までの距離に応じた距離データを測定する。レーザセンサ13、14は、例えば、レーザレンジファインダであり、ロボット1とともに移動する。レーザセンサ13は、水平面において、一定の角度毎にレーザ光を出射する。そして、そのレーザ光が反射して戻るまでの時間に応じて、障害物までの距離を検出する。また、障害物までの距離とは、障害物の外形までの距離である。レーザ光は、例えば、全方位に対して1度毎に出射されている。よって、ある測定面において、全方位で障害物までの距離が測定される。それぞれの方位における距離が集合することで距離データが構成される。レーザセンサ13、14からの出力は、制御部16に入力される。
【0031】
そして、周囲の障害物までの距離に応じて距離画像データが取得される。尚、距離画像データとは、移動環境に存在する障害物までの距離値を各画素の画素値として有する2次元データである。この距離画像データと推定用地図情報を用いて、自己位置を推定する。また、ここでの障害物とは、ロボット1が衝突するおそれのあるものや、移動の妨げとなるものであり、壁などを含む。
【0032】
レーザセンサ13はロボット1の前方に、レーザセンサ14はロボット1の後方に取り付けられている。レーザセンサ13は前方180度を、レーザセンサ14は後方180度を測定する。これにより、ロボット1の周りの全方位に対して距離情報を取得することができる。もちろん、レーザセンサ13、14の測定可能範囲は180°に限られるものではない。さらに、レーザセンサ13、14によるレーザ測定を行うことで、2次元の推定用地図情報を作成することができる。以下、レーザセンサ13、14による測定データをレーザデータと称することもある。
【0033】
なお、レーザレンジファインダ以外の、ステレオカメラ、距離画像カメラ(例えば、SR−4000)、3次元にレーザを照射して環境を測定するセンサ(例えば、リーグル)等を用いて距離データを測定しても良い。距離データを測定するセンサとして、光学的な測定を行うレーザセンサを用いたが、それ以外の方法で測定するセンサを用いても良い。また、一方のレーザセンサのみで測定を行っても良い。さらに、レーザセンサの数は2に限られるものではない。
【0034】
さらに、レーザセンサ13のチルト角を変える角度変更機構15が設けられている。角度変更機構は、例えば、関節機構であって、本体10に対するレーザセンサ13の角度を変える。これにより、レーザセンサ13が上、又は下を向き、ロボットのピッチ軸周りの角度が変化する。よって、レーザセンサ13のチルト角、すなわち測定面の角度が変化する。角度変更機構15には、回転角度を測定するエンコーダなどが設けられている。そして、角度変更機構15の回転角度は、制御部16に入力される。
【0035】
さらに、本体10の内部には、制御部16とジャイロセンサ17が内蔵されている。ジャイロセンサ17は、ロボット1の姿勢角を検出するセンサであり、例えば、水平面(地面)に対する本体10の角度を測定する。ジャイロセンサ17の出力は、制御部16に入力される。ジャイロセンサ17の検出結果によって、ロボット1の仰角を求めることができる。従って、ジャイロセンサ17の検出結果と、角度変更機構15の関節角度によって、レーザセンサ13の測定面の角度を求めることができる。また、ジャイロセンサ17によって、レーザセンサ14の測定面の角度も検出することができる。ここで、測定面の角度とは、水平面(地面)に対する角度であり、水平面と平行な場合を0度とする。
【0036】
制御部16は、CPU(Central Processing Unit)、ROM(Read Only Memory)、RAM(Random Access Memory)、通信用のインタフェイスなどを有する演算処理装置である。また、制御部16は、着脱可能なHDD、光ディスク、光磁気ディスク等を有し、各種プログラムや制御パラメータなどを記憶し、そのプログラムやデータを必要に応じてメモリ(不図示)等に供給する。もちろん、制御部16は、物理的に一つの構成に限られるものではない。
【0037】
制御部16は、移動制御するための演算処理を行う。例えば、制御部16は、自己位置推定を行う。そして、自己位置推定結果に応じて、前輪11、後輪12を駆動するためのモータ等を制御する。これにより、障害物と衝突せずに、自律移動することができる。なお、前輪11及び後輪12の一方のみが駆動輪であっても良い。制御部16は、移動環境の推定用地図情報を記憶している。そして、推定用地図情報と、レーザセンサ13、14で測定された距離情報と、に基づいて自己位置を推定する。具体的には、推定用地図情報と、距離情報に応じた距離画像データとのパターンマッチングを行う。そして、パターンがマッチングした位置をロボット1の自己位置として推定する。そして、現在の自己位置から、障害物と衝突しないように移動終点まで移動する。ロボット1は、所定の座席位置を移動終点として移動する。
【0038】
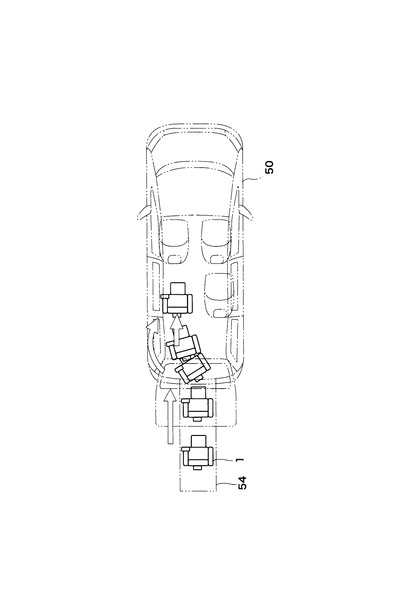
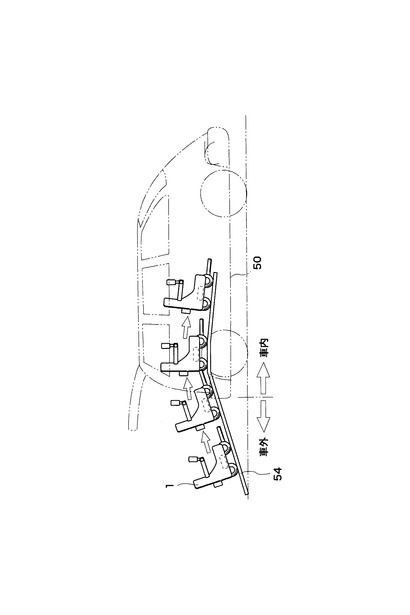
ロボット1がウェルキャブ車両を移動する様子を図2、図3に示す。図2、図3に示すように、ロボット1は、車外に設けられたスロープ54を上って、車両50内に入る。スロープ54は、車両50の後方に取り付けられている。ロボット1は、車両50の後方から所定の連結位置(移動終点)まで移動する。連結位置までロボット1が移動したら、ロボット1を車両50に連結する。このとき、スロープ54から車両50を移動する際、ロボット1は推定用地図情報を参照して、自己位置を推定している。
【0039】
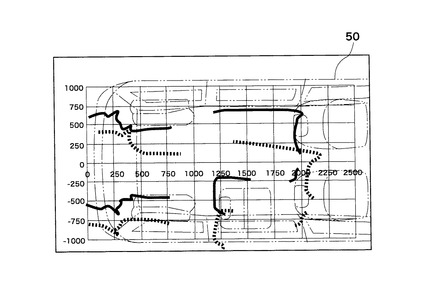
例えば、推定用地図情報は、図4に示すようになる、車両50内では、車両50の内壁、ギアボックス、シート、天井などが障害物となる。推定用地図情報は、これらの障害物に応じた、画像データである。図4では、太線が障害物の外形を示しており、点線がレーザ測定で測定された距離画像データを示している。そして、これらのパターンのマッチングを行うことで、自己位置推定が行われる。
【0040】
具体的には、レーザデータと同じように、2次元空間を障害物の位置座標値を格納した点列データで表現することで、推定用地図情報が作成される。推定用地図情報は、図4に示すように、予め定義された座標系についての障害物の位置座標が格納されている。図4に示す太線が、障害物が存在していない空間と、障害物が存在している空間の境界線となる。推定した自己位置を参照して、推定用地図情報に含まれる障害物と衝突しないように、前進、右旋回、左旋回等をする。そして、自己位置推定を繰り返しながら、移動していく。これにより、障害物を避けながら自律移動することができる。なお、推定用地図情報と移動用地図情報は異なる地図情報であってもよい。
【0041】
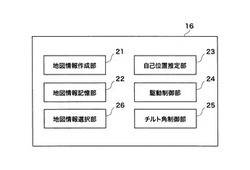
次に、制御部16の構成について、図5を用いて説明する。図5は、制御部16の構成を模式的に示すブロック図である。制御部16は、地図情報作成部21と、地図情報記憶部22と、自己位置推定部23と、駆動制御部24と、チルト角制御部25と、地図情報選択部26を備えている。地図情報作成部21は、移動環境の推定用地図情報を作成する。例えば、レーザセンサ13、14の測定によって、ある測定地点から障害物までの距離を求める。そして、ある測定地点から障害物までの距離に応じた距離データに基づいて、推定用地図情報を作成することができる。例えば、レーザセンサ13、14で取得した距離画像データに基づいて、推定用地図情報を作成する。例えば、ある地図情報に対して、その地図情報には存在していない障害物の情報を合成することで、推定用地図情報を作成する。
【0042】
地図情報記憶部22は、地図情報作成部21で作成された推定用地図情報を記憶する。さらに、後述す量に推定用地図情報が複数格納されていても良い。推定用地図情報は、移動環境、すなわち、車両50内、及びその周辺の障害物の位置座標等を有する2次元データである。なお、移動環境の推定用地図情報は、ロボット1と異なる別の装置によって、作成されても良い。すなわち、ロボット1と別のロボットや装置によって、レーザ測定を行っても良い。地図情報選択部26は、地図情報記憶部22に記憶されている複数の推定用地図情報の中から、1つの推定用地図情報を選択する。地図情報選択部26は、ロボット1の位置や、角度に応じて、推定用地図情報を選択する。
【0043】
自己位置推定部23は、選択された推定用地図情報に基づいて、自己位置を推定する。すなわち、レーザセンサ13、14による距離画像データを推定用地図情報に対してパターンマッチングする。そして、このパターンマッチング結果から、推定用地図情報内のロボット座標、すなわち、移動環境内の自己位置が推定される。このように、推定用地図情報と、距離画像データとを比較することで、自己位置が推定される。2次元の推定用地図情報と、2次元の距離画像データとをマッチングすることで、演算時間を短縮化することができる。
【0044】
駆動制御部24は、前輪11と後輪12の駆動を制御する。すなわち、推定された自己位置と推定用地図情報に基づいて、移動方向を決定する。具体的には、駆動制御部24は、自己位置を参照して、推定用地図情報内のどの方向に進めばよいかを決定する。これにより、例えば前輪11と後輪12の回転数や回転トルクに応じた指令値が、駆動モータに出力される。
【0045】
チルト角制御部25は、角度変更機構15を制御する。すなわち、ジャイロセンサ17での検出結果に応じて、角度変更機構15を駆動する。これにより、レーザセンサ13のチルト角が制御される。例えば、スロープ54上でのロボット位置に応じて、チルト角を変更しても良い。
【0046】
実施の形態1.
本実施の形態では、複数のレーザ測定結果に基づいて推定用地図情報が作成されている。そして、ロボット1が、推定用地図情報により自己位置推定を行っている。以下に推定用地図情報の作成について説明する。まず、推定用地図情報を作成するシステム構成に付いて、図6を用いて説明する。図6は、推定用地図情報を作成する作成システムの構成を示す図である。
【0047】
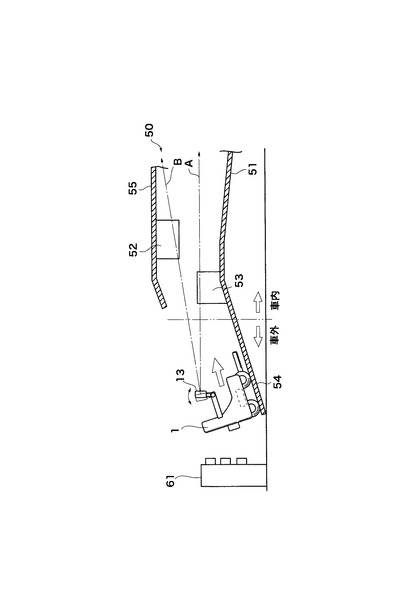
本実施の形態においても、図6に示すように、ロボット1は、車両50に進入する手前のスロープ54に上っている。このシステムには、3次元位置測定器61が設けられている。3次元位置測定器61は、車両50に対するロボット1を測定している。換言すると3次元位置測定器61は、移動環境におけるレーザセンサ13、14の位置を測定している。3次元位置測定器61は、例えば、東陽テクニカ社製のロボットキャリブレーションROCALシステムである。また、車両50には、障害物52、53が存在している。障害物53は、床51上に配置されたスロープギアボックスである。また、障害物52は、例えば、天井55に設けられた、跳ね上げサードシートである。
【0048】
スロープ54のたわみなどで、移動中のロボット1がピッチ方向に揺れてしまうことがある。揺れていないでレーザセンサ13が水平になっている状態では、レーザセンサ13が測定面Aで測定を行うことになる。よって、レーザセンサ13からのレーザ光は障害物53には当たるが、障害物52には当たらない。一方、揺れた状態では、レーザセンサ13が測定面Bを測定することになる。この場合、レーザセンサ13から出射されたレーザ光は障害物52には当たるが、障害物53には当たらない。このように、スロープ54のたわみなどでロボット1が揺れるような状況では、障害物52と障害物53のいずれが測定できるかわからない。従って、本実施形態では、2つの地図情報を合成して、推定用地図情報を作成している。具体的には、測定面Aと測定面Bの両方の地図情報を合成して、推定用地図情報として作成する。この場合、推定用地図情報には、障害物52、53の情報が含まれていることになる。
【0049】
このため、ロボット1がレーザセンサ13の測定結果を用いて、測定面Aと測定面Bの地図情報を作成する。具体的には、手動で、ロボット1をスロープ54上の所定の測定地点まで移動させる。なお、測定地点は実際に揺れが大きくなる位置とすることが好ましい。例えば、スロープ54の上り始めで揺れが発生しやすいため、スロープ54の上り始めの位置を測定地点とする。さらには、ロボット1を他の位置を測定地点としてもよい。もちろん、測定地点を2箇所以上としても良い。このように、1又は複数の測定地点までロボット1を手動で移動させる。
【0050】
このとき、ロボット1の詳細な測定地点の座標は、3次元位置測定器61で測定されている。すなわち、車両50を基準とするロボット1の3次元座標が、3次元位置測定器61によって正確に測定されている。そして、チルト角を変えた2つの測定面A,Bで、レーザセンサ13が周囲の障害物までの距離を検出する。これにより、測定面A、Bにおける障害物までの距離に応じた距離データが取得される。測定面A、Bにおける距離画像データがそれぞれ取得される。ここではレーザレンジファインダをレーザセンサ13として用いているため、全方位における障害物までの距離が検出される。なお、ジャイロセンサ17の測定によって、揺れが治まったことを検知した後、距離データを測定することが好ましい。また、測定面Aと測定面Bのチルト角は、実際の揺れに応じて決定すれば良い。すなわち、実際に揺れるだろう位置において、揺れる角度にレーザセンサ13を傾ける。もちろん、異なる測定地点では、異なるチルト角で測定しても良い。
【0051】
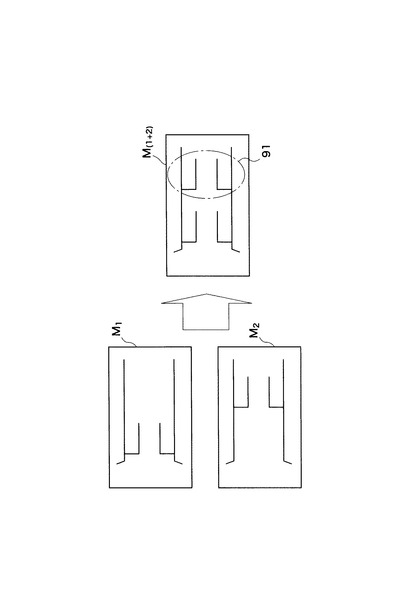
そして、3次元位置測定器61で測定された測定地点の座標とレーザセンサ13のチルト角とを考慮して、各測定面における地図情報を作成する。これにより、測定面Aにおいて測定された障害物の距離データを含む地図情報と、測定面Bにおいて測定された障害物の距離データを含む地図情報が作成される。例えば、図7に示すように、測定面Aの地図情報を地図情報M1とし、測定面Bの地図情報を地図情報M2とする。ここで、地図情報M1、M2において、障害物の外形が線として示されている。すなわち、地図情報M1,M2に示された線が障害物を示しており、ロボット1が移動する際は、この線を避けて移動する。合成された地図情報M(1+2)が推定用地図情報として使用される。推定用地図情報M(1+2)では、地図情報M1に対して、地図情報M2でしか検出されていない障害物を含む合成領域91が追加されている。
【0052】
このように、足りない障害物の距離データを補完する形で、合成された新たな地図情報を推定用地図情報として作成する。そして、実際にロボット1が車両50内に進入する際に、この推定用地図情報と用いて、自己位置を推定する。すなわち、推定用地図情報と距離画像データとをパターンマッチング処理する。これにより、スロープ54が揺れていなどの外乱があっても、正確に自己位置を推定することができる。揺れなどの外乱があった場合でも、正確に自己位置推定することができる。よって、移動中に揺れが治まるのを待つ必要がなく、安全かつ迅速な移動が可能となる。
【0053】
次に、地図情報の作成方法について、図8を用いて説明する。図8は、地図情報の作成方法を示すフローチャートである。まず、ロボット1の連結位置を基準に、測定地点の座標を計算する(ステップS101)。推定用地図情報の作成に必要な1又は複数の位置を測定地点とする。測定地点としては、スロープ54の上り始めの位置や、車両50内部等がある。ここでは、車両50全体の障害物が含まれるように、測定地点を決定する。すなわち、全ての障害物の情報が推定用地図情報に含まれるようにする。そして、測定地点にレーザセンサを置く(ステップS102)。例えば、手動でロボット1を測定地点まで移動する。ここでは、3次元位置測定器61によって、ロボット1の位置を測定している。このため、ロボット1を測定地点まで正確に移動することができる。測定地点までロボット1を移動したら、レーザセンサ13によって、レーザデータを取得する(ステップS103)。このレーザデータが障害物の距離の情報を含んでいる。
【0054】
そして、座標に紐づいた地図情報を作成する(ステップS104)。すなわち、測定地点の座標と、チルト角を考慮した地図情報を作成する。地図情報は、距離画像データに応じたパターンとなる。そして、測定地点が存在するかしないかを判定する(ステップS105)。すなわち、全ての測定地点の測定が終了するまで、上記の処理を繰り返す。全ての測定地点での測定を終了すると、全ての地図情報を合成して、地図の作成が完了する。すなわち、チルト角の異なる複数の地図情報をマージすることによって、推定用地図情報が作成される。このようにすることで、外乱に強い自己位置推定用の地図を作成することができる。自己位置推定に好適な推定用地図情報を作成することができるため、自己位置推定の精度を向上することができる。
【0055】
上記のように、異なる角度の測定面での位置情報(距離画像データ)を合成して、水平面における推定用地図情報を作成する。もちろん、水平面内の推定用地図情報に限らず、水平面以外の平面の推定用地図情報を作成しても良い。なお、1つの測定地点で3以上のチルト角でレーザデータを取得して、3以上の距離画像データを合成しても良い。なお、一部の測定地点では、1つのチルト角のみでレーザデータを取得しても良い。合成後の地図情報を揺れが大きくなる箇所でのみ使用しても良い。例えば、揺れが大きい、スロープ54の上り始めの周辺でのみ、合成した推定用地図情報を用いる。これら以外の揺れが小さい箇所では、1つのチルト角で測定された地図情報を推定用地図情報として用いる。すなわち、2つのチルト角の地図情報が合成されていない地図情報を推定用地図情報として用いる。これにより、正確に自己位置推定することができる。さらには、角度が同じで、高さの異なる測定面の距離画像データを合成しても良い。
【0056】
実施の形態2.
本実施の形態では、ロボット1の自己位置に応じて、地図を切り替えている。なお、本実施の形態では合成していない地図情報を推定用地図情報として利用している。すなわち、実施の形態1で示した合成後の地図情報ではなく、ある1つのチルト角で測定されたレーザデータに基づく地図情報を推定用地図情報として用いている。
【0057】
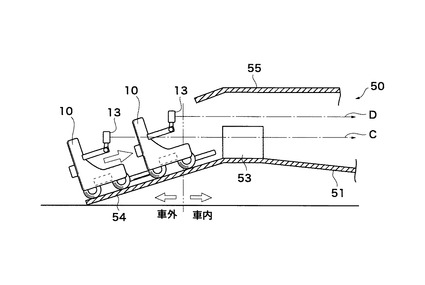
本実施の形態における自己位置推定について、図9を用いて説明する。図9は、車両50を移動するロボット1による自己位置推定を説明する図である。図9に示すように、スロープ54を移動している間は、ロボット1の位置に応じて、レーザセンサ13の高さが異なる。例えば、スロープ54の上り始めでは、レーザセンサ13が測定面Cの高さであるが、スロープ54の終わりでは、レーザセンサ13が測定面Dの高さとなる。すなわち、レーザセンサ13のチルト角を一定に保っていたとしても、測定面の高さが徐々に変化していく。よって、測定面Dでは、障害物53を検出することができない。すなわち、レーザセンサ13の測定面が障害物53よりも高くなるため、レーザセンサ13からのレーザ光が障害物53に当たらない。このように、レーザセンサ13が測定面の高さになると、レーザセンサ13の検出結果には、障害物53の情報が含まれなくなってしまう。このように、測定面の高さに応じて、レーザセンサ13で検出できる障害物が変わってくるため、障害物の距離情報が異なってしまうことになる。すなわち、測定面の高さに応じて、距離画像パターンに違いが生じてしまう。
【0058】
従って、本実施形態では、移動環境内のロボット1の自己位置に応じて、使用する推定用地図情報を切り替えている。すなわち、ロボット1の座標に応じて、異なる推定用地図情報を使用する。例えば、図10に示すPA地点までは、推定用地図情報Maを用いる。そして、PA地点からPB地点までは推定用地図情報Mabを用いる。さらに、B地点からC地点までは推定用地図情報Mbcを用い、PC地点からPD地点までは推定用地図情報Mcdを用いる。さらに、D地点を越えると推定用地図情報Mdに切り替える。なお、D地点を越えると、座席が近くなりすぎてしまうため、後ろ側のレーザセンサ14からの測定結果のみを使用して、自己位置推定する。このように、自己位置に応じて、使用するレーザセンサを切り替えることで、自己位置推定の精度を向上することができる。
【0059】
このように、推定された自己位置の座標に応じて、推定用地図情報を切り替える。すなわち、推定された自己位置がしきい値となる座標を越えたら、異なる推定用地図情報に切り替える。これにより、自己位置推定の精度を高くすることができる。例えば、推定用地図情報を切り替える時は、ロボット1の移動を一時的に停止してもよい。すなわち、自己位置の座標がしきい値を越えたら、ロボット1の移動を一時的に停止する。そして、切り替えが完了した後に、ロボット1の移動が再開する。これにより、推定用地図情報を切り替えるタイミングにおいても、自己位置推定の精度を向上することができる。しきい値となる座標は、障害物の位置に応じて予め設定すれば良い。すなわち、レーザセンサ13が障害物を越えたら、推定用地図情報を切り替えればよい。切り替える座標は、実際のロボット1を走行させたときの、自己位置推定結果が良かった位置から設定しても良い。
【0060】
本実施の形態では、地図情報記憶部22には、測定面の高さに応じた推定用地図情報が複数記憶されている。そして、自己位置に応じて、地図情報選択部26が選択する推定用地図情報を切り替える。推定用地図情報を切り替える処理に付いて、図11を用いて説明する。図11は、推定用地図情報を切り替えながら、移動する処理を示すフローチャートである。
【0061】
まず、人がロボット1に乗って、スロープ54の下付近まで移動させる(ステップS201)。そして、レーザセンサ13、14の測定によって自己位置推定を行う(ステップS202)。すなわち、レーザセンサ13、14によって検出された障害物の距離画像データと、推定用地図情報とを比較して、自己位置を推定する。なお、複数の推定用地図情報のうち、予め1つの推定用地図情報を最初に用いる設定しておく。例えば、図10に示す例では、推定用地図情報Maを最初に用いる推定用地図情報として設定しておく。
【0062】
そして、自己位置推定ができているか否か判定し(ステップS203)、推定できるまで上記の処理を繰り返す。自己位置が推定できたら(ステップS203のYES)、ロボット1が移動環境内での移動を開始する。具体的には、レーザセンサ13、14の測定結果によって自己位置を推定しながら、スロープ54又は車両50の内部を移動する(ステップS204)。これにより、前輪11、及び後輪12の駆動モータに指令値が出力される。そして、推定された自己位置が連結位置(移動終点)に到達しているか否かを判定する(ステップS205)。連結位置に到達した場合(ステップS206)、移動を終了する。
【0063】
連結位置に到達していない場合、地図の切り替え地点まで到達しているか否かを判定する(ステップS207)。ここでは、推定された自己位置の座標が所定のしきい値を越えたか否かによって、切り替え地点まで到達したか否かを判定する。切り替え地点まで到達していない場合(ステップS207のNO)、そのまま同じ推定用地図情報を用いてステップS204からの処理を繰り返す。切り替え地点に到達した場合は、自己位置推定する推定用地図情報を切り替える(ステップS208)。そして、切り替えられた推定用地図情報で、ステップS204からの処理を繰り返す。このようにして、ロボット1が車両50内を自律移動していく。
【0064】
このように、車両50を移動環境とすると、ロボット1が前に進めば進むほど、センシングする環境が変わってしまう。よって、ロボット1の自己位置に応じて、異なる高さで取得された推定用地図情報に切り替える。そして、推定用地図情報を切り替えることで、自己位置を精度よく推定することができる。なお、上記の説明では、推定用地図情報は、高さの異なる測定面での測定結果により作成したが、チルト角の異なる測定面での測定結果により作成しても良い。例えば、測定面のチルト角をスロープ54を上る時の角度に合わせればよい。あるいは、高さ、及びチルト角の両方ともが異なる測定面での測定結果に基づいて、推定用地図情報を作成しても良い。
【0065】
本実施の形態では、自己位置に応じて最適な推定用地図情報を選択することができる。これにより、自己位置推定の精度を向上することができる。よって、ウェルキャブ車両内を安全かつ迅速に移動することができる。
【0066】
実施の形態3.
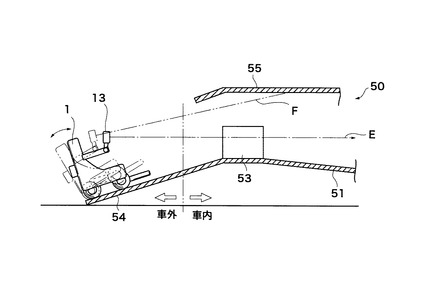
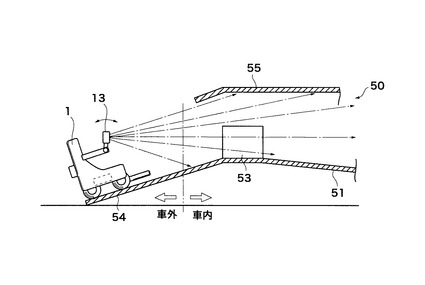
実施の形態3にかかる自己位置推定方法について、図12、及び図13を用いて説明する。図12は、ロボット1がスロープ54を上る様子を示す図である。図13は、本実施形態にかかる自己位置推定方法に用いられる推定用地図情報を説明するための図である。
【0067】
図12に示すように、ロボット1がスロープ54を上る際、スロープ54の撓みなどによって、ロボット1が揺れてしまう。ロボット1が揺れてしまうと、レーザセンサ13の測定面の仰角が変化してしまう。例えば、レーザセンサ13が測定面Eで測定したり、測定面Fで測定したりしてしまう。特にスロープ54の強度不足や、床51の凹凸によってロボット1が揺れる。この揺れが起きると障害物53が検出できずに、天井55を検出してしまう。すなわち、レーザセンサ13からのレーザ光が障害物53に照射されずに、天井55に照射されてしまう。よって、自己位置推定の精度が低下してしまう。
【0068】
そこで、本実施形態では、角度の異なる測定面で測定した測定結果から、それぞれ推定用地図情報を作成する。ここでは、ピッチ方向の揺れの影響を低減するために、複数の推定用地図情報から最適な地図情報を選択する。
【0069】
例えば、図13に示すように、角度変更機構15によってレーザセンサ13のチルト角を変えて、レーザ測定を行う。そして、それぞれの測定における距離画像データに基づいて、推定用地図情報を作成する。具体的には、同じ測定地点で、チルト角を変えてレーザ測定を行う。それぞれの測定結果から、異なる角度の推定用地図情報を作成する。例えば、数度毎にレーザ測定を行う。具体的には、−10°、−5°、0°、+5°、+10°でレーザ測定を行う。さらに、測定地点を変えて、それぞれの測定地点でチルト角を変えてレーザ測定を行う。この場合、地図情報記憶部22には、位置と角度とを紐付けて推定用地図情報が保存される。すなわち、推定用地図情報が測定位置タグと角度タグとともに地図情報記憶部22に格納される。自己位置推定部23には、測定位置タグ毎、角度タグ毎に推定用地図情報のファイルが格納されている。測定位置、または角度が異なれば、異なるファイルとして、推定用地図情報を地図情報記憶部22が記憶する。
【0070】
そして、地図情報記憶部22から、推定用地図情報のファイルを読み出して、自己位置推定を行う。ロボット1が車両50に進入する際、ジャイロセンサ17からの出力によって、水平面に対するレーザセンサ13、14の角度を求める。そして、自己位置推定部23は、レーザセンサ13、14の測定面の角度に応じた推定用地図情報を選択する。そして、選択された推定用地図情報を用いて自己位置推定を行う。すなわち、自己位置推定部23は、測定面の角度と同じか近い角度タグを有する推定用地図情報を選択する。さらに、自己位置推定部23は、ロボット1の位置と同じか近い測定位置タグを有する推定用地図情報を選択する。このように、自己位置推定部23は、測定した時の、測定地点位置と、測定面角度に応じた最適な推定用地図情報を選択する。こうすることで、自己位置推定の精度を向上することができる。
【0071】
さらに、本実施形態では、処理速度の低下を防ぐため、以下の処理を行っている。まず、自己位置推定部23が、地図情報記憶部22の中から、予め読み出す可能性がある推定用地図情報を複数抽出する。具体的には、推定された自己位置に近い推定用地図情報を抽出する。そして、自己位置推定部23は、抽出された複数の推定用地図情報を角度タグ付きでバッファ領域27に移動させる(図14)。図14は、地図情報記憶部22から推定用地図情報M3〜推定用地図情報M7が抽出されて、バッファ領域27に格納される。ジャイロセンサ17が所定の角度になった瞬間に、1つの推定用地図情報を演算領域に移動させる。すなわち、地図情報選択部26がジャイロセンサ17が検出した測定面の角度と一致する角度タグを有する推定用地図情報を選択する。この処理を行うことで、自己位置推定処理の遅延を回避することができる。なお、読み出す可能性に対する判断は、位置タグを用いればよい。すなわち、現在の推定自己位置に最も近い位置タグの推定用地図情報をバッファ領域27に格納すれば良い。
【0072】
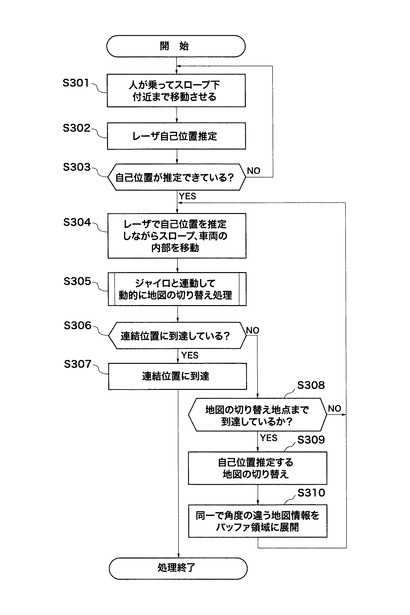
次に、本実施形態にかかる自己位置推定方法について、図15を用いて説明する。図15は、本実施形態に係る自己位置推定方法を示すフローチャートである。なお、本実施の形態にかかる自己位置推定方法は、基本的なフローは実施の形態1、2と同様であるため、適宜説明を省略する。
【0073】
実施の形態2と同様に、人がスロープ下付近まで移動させ(ステップS301)、レーザ自己位置推定を行う(ステップS302)。そして、自己位置推定ができたら(ステップS303のYES)、レーザで自己位置推定ながら、スロープ54、車両50の内部を移動する(ステップS304)。ここまでの処理は、実施の形態2で示したステップS201〜ステップS204の処理と同様であるため説明を省略する。
【0074】
そして、ジャイロセンサ17と連動して、動的に地図を切り替える処理を行う(ステップS305)。ステップS305では、ジャイロセンサ17の測定結果に応じて、バッファ領域27の中の推定用地図情報から、最適な角度タグの推定用地図情報が選択される。その後、連結位置に到達しているか判定し(ステップS306)。ステップS306〜ステップS309までの処理は、実施の形態2で示したステップS205〜ステップS208までの処理と同様であるため説明を省略する。そして、実施の形態2と同様に、自己位置に応じて、自己位置推定する推定用地図情報を切り替えたら(ステップS209)、同一位置で、測定角度の違う推定用地図情報をバッファ領域27に展開する。そして、ステップS304に戻り、レーザ自己位置推定しながら、スロープ54、車両50の内部を移動する。
【0075】
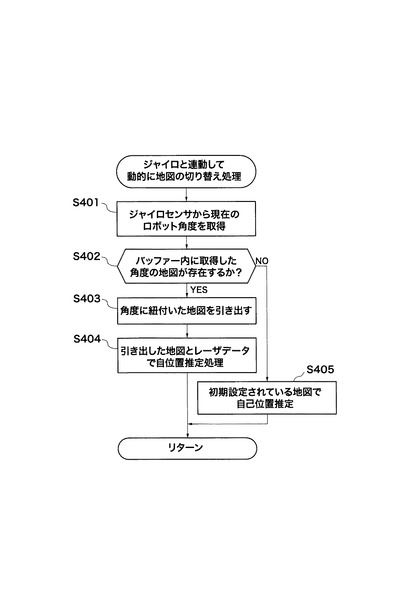
次に、図16を用いて、ジャイロセンサの出力と連動して、動的に推定用地図情報を切り替える処理に付いて説明する。図16は、この処理を示すフローチャートである。まず、ジャイロセンサ17から、現在のロボット角度を取得する(ステップS401)。すなわち、ロボット1の本体10の角度を測定する。これにより、レーザセンサ13、14の測定面の角度を求めることができる。ここで、測定面の角度は、水平面を0°とする。そして、バッファ領域27内に、ジャイロセンサ17で取得した角度の推定用地図情報が存在するか否かを判定する(ステップS402)。すなわち、予めバッファ領域27に抽出された複数の推定用地図情報の角度タグを参照して、測定面と一致する角度タグがあるか否かを判定する。
【0076】
一致する角度タグの推定用地図情報が存在する場合(ステップS402のYES)、その角度に紐付いた推定用地図情報を引き出す(ステップS403)。これにより、1つの推定用地図情報が演算領域に移動する。そして、引き出した推定用地図情報とレーザデータで自己位置推定を行う(ステップS404)。すなわち、レーザセンサ13、14で測定した距離画像データと、推定用地図情報のパターンマッチングによって、自己位置を推定する。一方、一致する角度タグの推定用地図情報が存在しない場合は、初期設定されている推定用地図情報で自己位置推定を行う(ステップS405)。このようにすることで、同じ角度のパターンで自己位置推定することができるため、推定精度を向上することができる。
【0077】
本実施の形態では、測定面角度、又は自己位置に応じて最適な推定用地図情報を選択することができる。これにより、自己位置推定の精度を向上することができる。よって、ウェルキャブ車両内を安全かつ迅速に移動することができる。
【0078】
実施の形態4.
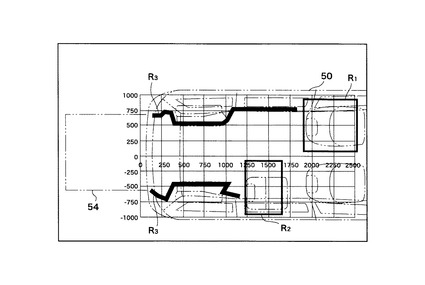
本実施の形態では、推定用地図情報の一部の領域に、障害物の位置を動的に変化できる領域を設けておく。そして、レーザ測定の結果によって、動的領域内の障害物の位置を決定する。例えば、車両50内では、シートの位置や姿勢が変化することがある。このような場合、シートの位置や姿勢が、予め記憶された推定用地図情報の情報と異なってしまう。本実施の形態では、シート等の障害物の位置・姿勢の違いを吸収して、正確に自己位置推定を行う方法を提供する。
【0079】
例えば、図17に示すように、領域R1、R2を障害物の位置が変化する動的領域とする。一方、領域R3,R4を障害物の位置が変化しない静的領域とする。具体的には、パッセンジャーシートの可動範囲を領域R1とし、セカンドシートの可動範囲を領域R2として設定する。これらのシートは、位置、姿勢が変化するため、ロボット1が同じ位置に存在する場合でも、障害物までの距離が変化することがある。領域R3、R4は例えば、車両50のボディの内壁等に相当する。
【0080】
地図情報記憶部22は、領域R1、R2を動的領域とする推定用地図情報を予め記憶している。動的領域では、障害物が存在していないとする。すなわち、領域R1、R2を除いた移動環境に対して障害物が存在する推定用地図情報を作成しておく。そして、レーザセンサ13、14による最初の測定結果に基づいて、領域R1、R2の障害物の位置を測定する。そして、予め記憶している推定用地図情報に対して、領域R1、R2における障害物の距離画像データを合成する。すなわち、地図情報作成部21が距離画像データの一部を切り出して、既に地図情報記憶部22記憶されている推定用地図情報にマージする。これにより、動的領域における障害物の座標が確定した推定用地図情報を作成することができる。
【0081】
具体的には、図18に示すように、領域R1,R2を障害物が全くない動的領域とする推定用地図情報M8が地図情報記憶部22に記憶されている。そして、自己位置推定部23が1回目のレーザ測定での距離画像データM9を、推定用地図情報M8とマッチングする。これにより、推定用地図情報における自己位置が推定される。そして、推定された自己位置に基づいて、領域R1,R2内の障害物の距離画像データを抽出する。すなわち、距離画像データ中から、領域R1、R2の距離画像データを取り出す。従って、領域R1,R2に配置された障害物の距離に応じた、領域R1,R2の距離画像データが抽出される。そして、領域R1,R2の距離画像データを推定用地図情報M8に合成する。これにより、動的領域における障害物の距離データが確定した推定用地図情報M10が作成される。この後は、推定用地図情報M10を用いて自己位置推定を行う。すなわち、推定用地図情報M8にR1、R2の距離画像データM9がマージされた推定用地図情報M10に基づいて、自己位置が推定される。これにより、可動する障害物がある移動環境においても、自己位置推定の精度を向上することができる。
【0082】
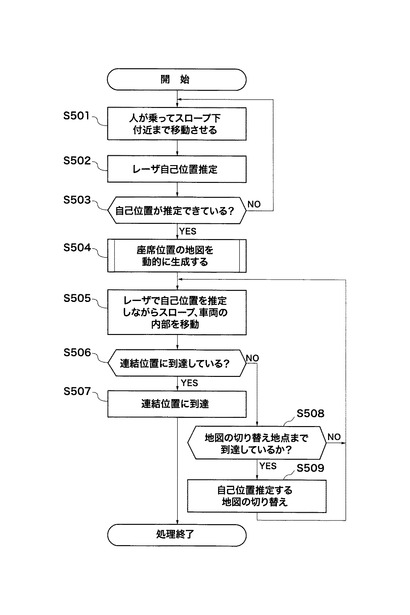
次に、図19を用いて、本実施形態にかかる自己位置推定方法について説明する。図19は、自己位置推定方法を示すフローチャートである。また、図19に示す自己位置推定方法では、実施の形態2で示した自己位置推定方法を利用している。すなわち、自己位置に応じて推定用地図情報を切り替えている。従って、実施の形態1、2で説明した内容については、適宜説明を省略する。具体的には、図19に示すステップS501〜ステップS503が図11のステップS201〜ステップS203に対応する。
【0083】
ここで、ステップS502では、動的領域の障害物を除いた推定用地図情報によって自己位置推定を行う。従って、自己位置推定ができたら(ステップS503のYES)、座席位置の地図を動的に作成する(ステップS504)。すなわち、自己位置推定に用いた距離画像データM9から、領域R1,R2の距離画像データを抽出し、動的領域の障害物を除いた推定用地図情報M8と合成する。これにより、推定用地図情報M10が作成される。推定用地図情報10では、領域R1,R2内の障害物の位置が確定している。
【0084】
そして、レーザセンサ13、14の測定結果によって自己位置を推定しながら、スロープ54上、又は車両50の内部を移動する(ステップS505)。これ以降のステップS506〜ステップS509は、実施の形態2で示したステップS205〜ステップS208と同様であるため説明を省略する。
【0085】
本実施の形態ではステップS504でレーザ測定の結果から推定用地図情報を作成している。ここでは、一度のレーザ測定結果から、切り替えに用いられる全ての推定用地図情報を作成しているが、一部の推定用地図情報を作成しても良い。この場合、別のレーザ測定結果から推定用地図情報を作成するようにする。
【0086】
次に、動的領域の障害物情報を加えた推定用地図情報の作成について、図20を用いて説明する。図20は、推定用地図情報を作成する方法を示すフローチャートである。先ず、ステップS504の処理となった段階で、予め作成した推定用地図情報とレーザデータのマッチング処理を行う(ステップS601)。すなわち、レーザ測定による距離画像データを、動的領域の障害物を除いた推定用地図情報にマッチングさせる。
【0087】
次に、動的領域内のレーザデータを算出する(ステップS602)。ここでは、例えば、動的領域内における障害物の座標が算出される。そして、動的領域内に障害物のデータが存在するか否かを判定する(ステップS603)。動的領域内に障害物のデータがあり場合(ステップS603のYES)、対象となる障害物のデータをメモリから切り取る(ステップS604)。すなわち、動的領域内の障害物の座標を抽出する。そして、予め作成していた推定用地図情報に、メモリから切り出したデータを上書きする。これにより、推定用地図情報に、動的領域内の障害物の情報が追加される。そして、障害物の情報が追加された推定用地図情報を用いて、図19で示した自己位置推定を行う。一方、動的領域に障害物のデータがない場合(ステップS603のNO)、マージ処理を行わず、次の処理に移行するステップ(S606)。すなわち、ステップS601で推定に用いられた推定用地図情報がそのまま使用される。
【0088】
このように、障害物の位置・姿勢が動的に変化する領域を動的領域とする。そして、動的領域では障害物のレーザデータを推定用地図情報に合成する。このようにすることで、正確な障害物の情報を有する推定用地図情報を利用することができる。よって、高精度で、自己位置推定することができる。なお、上記の説明では、動的領域をシートの可動範囲としてが、他の障害物の可動範囲を動的領域としてもよい。もちろん、その障害物が動くことができる最大の範囲を動的領域として設定すればよい。
【0089】
なお、上記の実施の形態1乃至4は、適宜組み合わせて実施してもよく、別々に実施しても良い。例えば、実施の形態1で作成した推定用地図情報を用いて地図情報を作成し、その推定用地図情報を用いて実施の形態2、3、4の自己位置推定方法で自己位置推定する。さらには、実施の形態2、3、及び4のうちの、2つ以上の自己位置推定方法を組み合わせも良く、それぞれ別個に用いてもよい。
【0090】
実施形態1乃至4に示された方法によって、自己位置推定精度を向上することができる。例えば、揺れが大きい移動環境や、フロアの凹凸がある移動環境、スロープを上る移動環境等の場合、外乱が生じやすいが、上記の方法によってロバスト性を向上することができる。さらに、移動環境自体に特別な装置やセンサを用いる必要がなくなる。このように、上記の方法は、ウェルキャブ車両内への進入など、外乱の大きい移動環境に対して好適である。さらに3次元を測定するセンサを用いる必要がないため、小型化などを図ることができる。すなわち、2次元の測定面を測定するセンサを用いることでロボット1を小型化、軽量化することができる。さらに、2次元の情報を用いているため、演算時間を短縮することができる。
【符号の説明】
【0091】
1 ロボット
10 本体
11 前輪
12 後輪
13 レーザセンサ
14 レーザセンサ
15 角度変更機構
16 制御部
17 ジャイロセンサ
21 地図情報作成部
22 地図情報記憶部
23 自己位置推定部
24 駆動制御部
25 チルト角制御部
26 地図情報選択部
27 バッファ領域
50 車両
51 床
52 障害物
53 障害物
54 スロープ
55 天井
61 3次元位置測定器
91 合成領域
【技術分野】
【0001】
本発明は、自律移動体、自己位置推定方法、地図情報作成システム、及び地図情報作成方法に関する。
【背景技術】
【0002】
近年、建物内部や屋外の限定された領域内を、周囲の環境に基づいて自律的に移動可能な自律移動型ロボットなどの移動体が開発されつつある。このような移動体は、予め記憶された移動する領域に関する移動マップ上において、現在の自己の位置から特定の目標地点までの移動経路を作成することで自律移動を可能とするため、通常、移動する領域内における自己位置を認識する機能を備えている。このような自律移動体を制御するための自己位置推定方法が特許文献1に開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−176031号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところで、ウェルキャブ車両(車椅子で搭乗可能な自動車)では、利用者が車椅子に乗ったまま、自動車内に乗り込む。このとき、従来の車椅子では、補助者がウインチを操作したり、車椅子が車両から落ちたりしないように補助する必要がある。さらに、搭乗まで時間がかかってしまう。よって、車椅子ユーザや補助者にとって大きな負担となっている。
【0005】
そこで、本件出願人は、自律移動体を車椅子として利用して、ウェルキャブ車両に全自動で搭乗可能な機能を開発している。ウェルキャブ車両内では、シートなどの障害物が配置されている。このため、移動環境が複雑になり、自己位置推定による自律移動が困難である。しかしながら、特許文献1に記載の自己位置推定方法では、環境内に赤外線照射部を設ける必要が生じてしまう。実用上、ウェルキャブ車両内に赤外線照射部を設けることは困難である。従って、自己位置推定が正確に行うことが困難であるという問題点が生じてしまう。
【0006】
本発明は、上記の問題点に鑑みてなされたものであり、自己位置推定の精度を向上することができる自律移動体、自己位置推定方法、地図情報作成システム、及び地図情報作成方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の第1の態様にかかる自律移動体は、移動環境内の推定用地図情報に基づいて自己位置を推定して、前記移動環境内を移動する自律移動体であって、周囲の障害物までの距離に応じた距離データを測定するセンサ部と、前記移動環境内の障害物の配置に応じた2次元の推定用地図情報を複数記憶する地図情報記憶部であって、前記移動環境の異なる測定面での推定用地図情報を記憶する地図情報記憶部と、前記自己位置又は前記センサ部の測定角度に基づいて、前記地図情報記憶部に記憶された複数の推定用地図情報の中から1つの推定用地図情報を選択する地図情報選択部と、前記地図情報選択部で選択された推定用地図情報と前記センサ部で測定された距離データとに基づいて、自己位置を推定する自己位置推定部と、を備えたものである。この構成によれば、適切な推定用地図情報を選択することができるため、自己位置推定の精度を向上することができる。
【0008】
本発明の第2の態様にかかる自律移動体は、上記の自律移動体であって、前記センサ部の測定角度を測定する角度センサをさらに備え、前記地図情報記憶部が異なる角度の測定面の推定用地図情報を記憶しており、前記角度センサの測定結果に応じて、前記位置情報選択部が前記推定用地図情報を選択するものである。これにより、適切な推定用地図情報を選択することができるため、自己位置推定の精度を向上することができる。
【0009】
本発明の第3の態様にかかる自律移動体は、上記の自律移動体であって、前記自己位置推定部で推定された自己位置が所定の位置を越えたら、前記地図情報選択部が選択する推定用地図情報を切り替えるものである。これにより、適切なタイミングで推定用地図情報を切り替えることができるため、自己位置推定の精度を向上することができる。
【0010】
本発明の第4の態様にかかる自律移動体は、上記の自律移動体であって、前記移動環境内の障害物の位置に応じて、前記推定用地図情報を切り替える位置が予め設定されているものである。これにより、適切な推定用地図情報を選択することができるため、自己位置推定の精度を向上することができる。
【0011】
本発明の第5の態様にかかる自律移動体は、上記の自律移動体であって、前記推定用地図情報を切り替える時に、前記自律移動体の移動が停止することを特徴とするものである。これにより、推定用地図情報を切り替えるタイミングにおいても、自己位置推定の精度を向上することができる。
【0012】
本発明の第6の態様にかかる自律移動体は、上記の自律移動体であって、前記距離データに応じた距離画像データと、前記推定用地図情報とをパターンマッチングして、自己位置を推定するものである。これにより、自己位置を正確に推定することができる。
【0013】
本発明の第7の態様にかかる自律移動体は、移動環境内の推定用地図情報に基づいて自己位置を推定して、前記移動環境内を移動する自律移動体であって、周囲の障害物までの距離を測定するセンサ部と、前記移動環境内の障害物の配置に応じた2次元の推定用地図情報を記憶する地図情報記憶部と、前自律移動体の移動中に前記センサ部で測定された距離に基づく距離画像データを切り出して、前記推定用地図情報に合成する地図情報作成部と、前記距離画像データが合成された前記推定用地図情報と、合成した後の前記センサ部の測定結果と、に基づいて、自己位置を推定する自己位置推定部と、を備えるものである。これにより、適切な推定用地図情報を用いることができるため、自己位置推定の精度を向上することができる。
【0014】
本発明の第8の態様にかかる自律移動体は、上記の自律移動体であって、前記移動環境の一部の領域に対応して、前記距離画像データが切り出され、前記移動環境の前記一部の領域が、前記障害物の可動範囲に基づいて設定されているものである。これにより、適切に合成することができるため、自己位置推定の精度を向上することができる。
【0015】
本発明の第9の態様にかかる地図情報作成システムは、移動環境内の自己位置推定に用いられる推定用地図情報を作成する地図情報作成システムであって、所定の測定面において、前記移動環境の障害物までの距離を測定するセンサ部と、前記移動環境における前記センサ部の位置を測定する位置測定部と、前記センサ部の測定面の角度を変更する角度変更機構と、異なる角度の測定面において前記センサ部が測定した距離に応じた距離画像データを合成して、前記推定用地図情報を作成する地図情報作成部と、を備えるものである。これにより、自己位置推定に好適な推定用地図情報を作成することができるため、自己位置推定の精度を向上することができる。
【0016】
本発明の第10の態様にかかる自己位置推定方法は、移動環境内の推定用地図情報に基づいて自己位置を推定する移動体における自己位置推定方法であって、周囲の障害物までの距離に応じた距離データを測定するステップと、前記移動環境内の障害物の配置に応じた2次元の推定用地図情報が異なる測定面毎に記憶された地図情報記憶部から、前記移動体の位置又は姿勢に基づいて、1つの推定用地図情報を選択するステップと、選択された前記推定用地図情報と、前記距離データと、に基づいて自己位置を推定するステップと、を備えるものである。これにより、適切な推定用地図情報を選択することができるため、自己位置推定の精度を向上することができる。
【0017】
本発明の第11の態様にかかる自己位置推定方法は、上記の自己位置推定方法であって、前記距離データを測定するセンサ部の測定角度を測定するステップをさらに備え、前記地図情報記憶部が異なる角度の測定面の推定用地図情報を記憶しており、前記測定角度に応じて、前記推定用地図情報を選択するものである。これにより、適切な推定用地図情報を選択することができるため、自己位置推定の精度を向上することができる。
【0018】
本発明の第12の態様にかかる自己位置推定方法は、上記の自己位置推定方法であって、推定された前記自己位置が、所定の位置を越えたら、別の推定用地図情報に切り替えるものである。これにより、適切な推定用地図情報を選択することができるため、自己位置推定の精度を向上することができる。
【0019】
本発明の第13の態様にかかる自己位置推定方法は、上記の自己位置推定方法であって、 前記移動環境内の障害物の位置に応じて、前記推定用地図情報を切り替える位置が予め設定されているものである。これにより、適切なタイミングで推定用地図情報を切り替えることができるため、自己位置推定の精度を向上することができる。
【0020】
本発明の第14の態様にかかる自己位置推定方法は、上記の自己位置推定方法であって、前記推定用地図情報を切り替える時に、前記自律移動体の移動が停止することを特徴とするものである。これにより、推定用地図情報を切り替えるタイミングにおいても、自己位置推定の精度を向上することができる。
【0021】
本発明の第15の態様にかかる自己位置推定方法は、上記の自己位置推定方法であって、前記距離データに応じた距離画像データと、前記推定用地図情報とをパターンマッチングして、自己位置を推定するものである。これにより、自己位置推定の精度を向上することができる。
【0022】
本発明の第16の態様にかかる自己位置推定方法は、移動環境内の推定用地図情報に基づいて自己位置を推定する移動体における自己位置推定方法であって、周囲の障害物までの距離を測定するステップと、前記自律移動体の移動中に前記センサ部で測定された距離に基づく距離画像データを切り出して、推定用地図情報に合成するステップと、前記距離画像データが合成された前記推定用地図情報と、合成した後の前記センサ部の測定結果とに基づいて、自己位置を推定するステップと、を備えるものである。これにより、適切な推定用地図情報を用いることができるため、自己位置推定の精度を向上することができる。
【0023】
本発明の第17の態様にかかる自己位置推定方法は、上記の自己位置推定方法であって、前記移動環境の一部の領域に対応して、前記距離画像データが切り出され、前記移動環境の前記一部の領域が、前記障害物の可動範囲に基づいて設定されているものである。これにより、適切に合成することができるため、自己位置推定の精度を向上することができる。
【0024】
本発明の第18の態様にかかる地図情報作成方法は、移動環境内の自己位置推定に用いられる推定用地図情報を作成する地図情報作成方法であって、所定の測定面において、前記移動環境の障害物までの距離を測定するステップと、前記移動環境における前記センサ部の位置を測定するステップと、前記センサ部の測定面の角度を変更するステップと、異なる角度の測定面において前記センサ部が測定した距離に応じた距離画像データを合成して、推定用地図情報を作成するステップと、を備えるものである。これにより、自己位置推定に好適な推定用地図情報を作成することができるため、自己位置推定の精度を向上することができる。
【発明の効果】
【0025】
本発明によれば、自己位置推定の精度を向上することができる自律移動体、自己位置推定方法、地図情報作成システム、及び地図情報作成方法を提供することを提供することができる。
【図面の簡単な説明】
【0026】
【図1】本発明にかかるロボットの全体構成を模式的に示す図である。
【図2】本発明にかかるロボットが車両に進入する様子を示す上面図である。
【図3】本発明にかかるロボットが車両に進入する様子を示す側面図である。
【図4】本発明にかかるロボットの自己位置推定に用いられる推定用地図情報を示す図である。
【図5】本発明にかかる移動体の制御部の構成を示すブロック図である。
【図6】実施の形態1にかかる地図情報作成システムを示す図である。
【図7】実施の形態1にかかる地図情報作成システムによって作成された推定用地図情報を模式的に示す図である。
【図8】実施の形態1にかかる地図情報作成方法を示すフローチャートである。
【図9】車両を移動するロボットによる自己位置推定を説明する図である。
【図10】実施の形態2にかかるロボットにおける推定用地図情報の切り替えを説明する図である。
【図11】実施の形態2にかかる自己位置推定方法を示すフローチャートである。
【図12】車両を移動するロボットによる自己位置推定を説明する図である。
【図13】実施の形態3にかかるロボットが、推定用地図情報を取得している様子を示す図である。
【図14】実施の形態3にかかるロボットが、推定用地図情報を読み出す様子を説明する図である。
【図15】実施の形態3にかかる自己位置推定方法を示すフローチャートである。
【図16】実施の形態3にかかる自己位置推定方法において、推定用地図情報を切り替えるフローを示すフローチャートである。
【図17】実施の形態4にかかるロボットの自己位置推定に用いられる推定用地図情報を示す図である。
【図18】実施の形態4にかかるロボットの自己位置推定で作成された推定用地図情報を示す図である。
【図19】実施の形態4にかかる自己位置推定方法を示すフローチャートである。
【図20】実施の形態4にかかる自己位置推定方法において、地図情報を作成するフローを示すフローチャートである。
【発明を実施するための形態】
【0027】
以下、本発明に係る移動体の実施形態を、図面に基づいて詳細に説明する。但し、本発明が以下の実施形態に限定される訳ではない。また、説明を明確にするため、以下の記載及び図面は、適宜、簡略化されている。
【0028】
まず、本発明に係る移動体の一例であるロボットの構成について、図1を用いて説明する。図1はロボット1の構成を模式的に示す側面図である。本実施の形態では、ロボット1が、移動環境内を自己位置推定しながら、自律移動する自律移動体として説明する。ここでは、ロボット1が ウェルキャブ車両内を移動するものとして説明する。もちろん、移動環境は、ウェルキャブ車両に限られるものではない。
【0029】
ロボット1は、本体10と、前輪11と、後輪12と、レーザセンサ13と、レーザセンサ14と、角度変更機構15と、制御部16と、ジャイロセンサ17とを備えている。前輪11と、後輪12は、本体10に対して回転可能に取り付けられている。また、前輪11と後輪12は、例えば、モータによって回転する。例えば、前輪11と後輪12を前方の回転することで前進し、後方に回転することで後退する。さらに、前輪11が左右両側に設けられている場合、左右の回転数を変えることで、左右に旋回する。なお、車輪の数は特に限定されるものではなく、2輪、3輪、4輪、あるいはそれ以上の数の車輪を有していても良い。
【0030】
レーザセンサ13、14は、所定の測定面において、周囲の障害物までの距離に応じた距離データを測定する。レーザセンサ13、14は、例えば、レーザレンジファインダであり、ロボット1とともに移動する。レーザセンサ13は、水平面において、一定の角度毎にレーザ光を出射する。そして、そのレーザ光が反射して戻るまでの時間に応じて、障害物までの距離を検出する。また、障害物までの距離とは、障害物の外形までの距離である。レーザ光は、例えば、全方位に対して1度毎に出射されている。よって、ある測定面において、全方位で障害物までの距離が測定される。それぞれの方位における距離が集合することで距離データが構成される。レーザセンサ13、14からの出力は、制御部16に入力される。
【0031】
そして、周囲の障害物までの距離に応じて距離画像データが取得される。尚、距離画像データとは、移動環境に存在する障害物までの距離値を各画素の画素値として有する2次元データである。この距離画像データと推定用地図情報を用いて、自己位置を推定する。また、ここでの障害物とは、ロボット1が衝突するおそれのあるものや、移動の妨げとなるものであり、壁などを含む。
【0032】
レーザセンサ13はロボット1の前方に、レーザセンサ14はロボット1の後方に取り付けられている。レーザセンサ13は前方180度を、レーザセンサ14は後方180度を測定する。これにより、ロボット1の周りの全方位に対して距離情報を取得することができる。もちろん、レーザセンサ13、14の測定可能範囲は180°に限られるものではない。さらに、レーザセンサ13、14によるレーザ測定を行うことで、2次元の推定用地図情報を作成することができる。以下、レーザセンサ13、14による測定データをレーザデータと称することもある。
【0033】
なお、レーザレンジファインダ以外の、ステレオカメラ、距離画像カメラ(例えば、SR−4000)、3次元にレーザを照射して環境を測定するセンサ(例えば、リーグル)等を用いて距離データを測定しても良い。距離データを測定するセンサとして、光学的な測定を行うレーザセンサを用いたが、それ以外の方法で測定するセンサを用いても良い。また、一方のレーザセンサのみで測定を行っても良い。さらに、レーザセンサの数は2に限られるものではない。
【0034】
さらに、レーザセンサ13のチルト角を変える角度変更機構15が設けられている。角度変更機構は、例えば、関節機構であって、本体10に対するレーザセンサ13の角度を変える。これにより、レーザセンサ13が上、又は下を向き、ロボットのピッチ軸周りの角度が変化する。よって、レーザセンサ13のチルト角、すなわち測定面の角度が変化する。角度変更機構15には、回転角度を測定するエンコーダなどが設けられている。そして、角度変更機構15の回転角度は、制御部16に入力される。
【0035】
さらに、本体10の内部には、制御部16とジャイロセンサ17が内蔵されている。ジャイロセンサ17は、ロボット1の姿勢角を検出するセンサであり、例えば、水平面(地面)に対する本体10の角度を測定する。ジャイロセンサ17の出力は、制御部16に入力される。ジャイロセンサ17の検出結果によって、ロボット1の仰角を求めることができる。従って、ジャイロセンサ17の検出結果と、角度変更機構15の関節角度によって、レーザセンサ13の測定面の角度を求めることができる。また、ジャイロセンサ17によって、レーザセンサ14の測定面の角度も検出することができる。ここで、測定面の角度とは、水平面(地面)に対する角度であり、水平面と平行な場合を0度とする。
【0036】
制御部16は、CPU(Central Processing Unit)、ROM(Read Only Memory)、RAM(Random Access Memory)、通信用のインタフェイスなどを有する演算処理装置である。また、制御部16は、着脱可能なHDD、光ディスク、光磁気ディスク等を有し、各種プログラムや制御パラメータなどを記憶し、そのプログラムやデータを必要に応じてメモリ(不図示)等に供給する。もちろん、制御部16は、物理的に一つの構成に限られるものではない。
【0037】
制御部16は、移動制御するための演算処理を行う。例えば、制御部16は、自己位置推定を行う。そして、自己位置推定結果に応じて、前輪11、後輪12を駆動するためのモータ等を制御する。これにより、障害物と衝突せずに、自律移動することができる。なお、前輪11及び後輪12の一方のみが駆動輪であっても良い。制御部16は、移動環境の推定用地図情報を記憶している。そして、推定用地図情報と、レーザセンサ13、14で測定された距離情報と、に基づいて自己位置を推定する。具体的には、推定用地図情報と、距離情報に応じた距離画像データとのパターンマッチングを行う。そして、パターンがマッチングした位置をロボット1の自己位置として推定する。そして、現在の自己位置から、障害物と衝突しないように移動終点まで移動する。ロボット1は、所定の座席位置を移動終点として移動する。
【0038】
ロボット1がウェルキャブ車両を移動する様子を図2、図3に示す。図2、図3に示すように、ロボット1は、車外に設けられたスロープ54を上って、車両50内に入る。スロープ54は、車両50の後方に取り付けられている。ロボット1は、車両50の後方から所定の連結位置(移動終点)まで移動する。連結位置までロボット1が移動したら、ロボット1を車両50に連結する。このとき、スロープ54から車両50を移動する際、ロボット1は推定用地図情報を参照して、自己位置を推定している。
【0039】
例えば、推定用地図情報は、図4に示すようになる、車両50内では、車両50の内壁、ギアボックス、シート、天井などが障害物となる。推定用地図情報は、これらの障害物に応じた、画像データである。図4では、太線が障害物の外形を示しており、点線がレーザ測定で測定された距離画像データを示している。そして、これらのパターンのマッチングを行うことで、自己位置推定が行われる。
【0040】
具体的には、レーザデータと同じように、2次元空間を障害物の位置座標値を格納した点列データで表現することで、推定用地図情報が作成される。推定用地図情報は、図4に示すように、予め定義された座標系についての障害物の位置座標が格納されている。図4に示す太線が、障害物が存在していない空間と、障害物が存在している空間の境界線となる。推定した自己位置を参照して、推定用地図情報に含まれる障害物と衝突しないように、前進、右旋回、左旋回等をする。そして、自己位置推定を繰り返しながら、移動していく。これにより、障害物を避けながら自律移動することができる。なお、推定用地図情報と移動用地図情報は異なる地図情報であってもよい。
【0041】
次に、制御部16の構成について、図5を用いて説明する。図5は、制御部16の構成を模式的に示すブロック図である。制御部16は、地図情報作成部21と、地図情報記憶部22と、自己位置推定部23と、駆動制御部24と、チルト角制御部25と、地図情報選択部26を備えている。地図情報作成部21は、移動環境の推定用地図情報を作成する。例えば、レーザセンサ13、14の測定によって、ある測定地点から障害物までの距離を求める。そして、ある測定地点から障害物までの距離に応じた距離データに基づいて、推定用地図情報を作成することができる。例えば、レーザセンサ13、14で取得した距離画像データに基づいて、推定用地図情報を作成する。例えば、ある地図情報に対して、その地図情報には存在していない障害物の情報を合成することで、推定用地図情報を作成する。
【0042】
地図情報記憶部22は、地図情報作成部21で作成された推定用地図情報を記憶する。さらに、後述す量に推定用地図情報が複数格納されていても良い。推定用地図情報は、移動環境、すなわち、車両50内、及びその周辺の障害物の位置座標等を有する2次元データである。なお、移動環境の推定用地図情報は、ロボット1と異なる別の装置によって、作成されても良い。すなわち、ロボット1と別のロボットや装置によって、レーザ測定を行っても良い。地図情報選択部26は、地図情報記憶部22に記憶されている複数の推定用地図情報の中から、1つの推定用地図情報を選択する。地図情報選択部26は、ロボット1の位置や、角度に応じて、推定用地図情報を選択する。
【0043】
自己位置推定部23は、選択された推定用地図情報に基づいて、自己位置を推定する。すなわち、レーザセンサ13、14による距離画像データを推定用地図情報に対してパターンマッチングする。そして、このパターンマッチング結果から、推定用地図情報内のロボット座標、すなわち、移動環境内の自己位置が推定される。このように、推定用地図情報と、距離画像データとを比較することで、自己位置が推定される。2次元の推定用地図情報と、2次元の距離画像データとをマッチングすることで、演算時間を短縮化することができる。
【0044】
駆動制御部24は、前輪11と後輪12の駆動を制御する。すなわち、推定された自己位置と推定用地図情報に基づいて、移動方向を決定する。具体的には、駆動制御部24は、自己位置を参照して、推定用地図情報内のどの方向に進めばよいかを決定する。これにより、例えば前輪11と後輪12の回転数や回転トルクに応じた指令値が、駆動モータに出力される。
【0045】
チルト角制御部25は、角度変更機構15を制御する。すなわち、ジャイロセンサ17での検出結果に応じて、角度変更機構15を駆動する。これにより、レーザセンサ13のチルト角が制御される。例えば、スロープ54上でのロボット位置に応じて、チルト角を変更しても良い。
【0046】
実施の形態1.
本実施の形態では、複数のレーザ測定結果に基づいて推定用地図情報が作成されている。そして、ロボット1が、推定用地図情報により自己位置推定を行っている。以下に推定用地図情報の作成について説明する。まず、推定用地図情報を作成するシステム構成に付いて、図6を用いて説明する。図6は、推定用地図情報を作成する作成システムの構成を示す図である。
【0047】
本実施の形態においても、図6に示すように、ロボット1は、車両50に進入する手前のスロープ54に上っている。このシステムには、3次元位置測定器61が設けられている。3次元位置測定器61は、車両50に対するロボット1を測定している。換言すると3次元位置測定器61は、移動環境におけるレーザセンサ13、14の位置を測定している。3次元位置測定器61は、例えば、東陽テクニカ社製のロボットキャリブレーションROCALシステムである。また、車両50には、障害物52、53が存在している。障害物53は、床51上に配置されたスロープギアボックスである。また、障害物52は、例えば、天井55に設けられた、跳ね上げサードシートである。
【0048】
スロープ54のたわみなどで、移動中のロボット1がピッチ方向に揺れてしまうことがある。揺れていないでレーザセンサ13が水平になっている状態では、レーザセンサ13が測定面Aで測定を行うことになる。よって、レーザセンサ13からのレーザ光は障害物53には当たるが、障害物52には当たらない。一方、揺れた状態では、レーザセンサ13が測定面Bを測定することになる。この場合、レーザセンサ13から出射されたレーザ光は障害物52には当たるが、障害物53には当たらない。このように、スロープ54のたわみなどでロボット1が揺れるような状況では、障害物52と障害物53のいずれが測定できるかわからない。従って、本実施形態では、2つの地図情報を合成して、推定用地図情報を作成している。具体的には、測定面Aと測定面Bの両方の地図情報を合成して、推定用地図情報として作成する。この場合、推定用地図情報には、障害物52、53の情報が含まれていることになる。
【0049】
このため、ロボット1がレーザセンサ13の測定結果を用いて、測定面Aと測定面Bの地図情報を作成する。具体的には、手動で、ロボット1をスロープ54上の所定の測定地点まで移動させる。なお、測定地点は実際に揺れが大きくなる位置とすることが好ましい。例えば、スロープ54の上り始めで揺れが発生しやすいため、スロープ54の上り始めの位置を測定地点とする。さらには、ロボット1を他の位置を測定地点としてもよい。もちろん、測定地点を2箇所以上としても良い。このように、1又は複数の測定地点までロボット1を手動で移動させる。
【0050】
このとき、ロボット1の詳細な測定地点の座標は、3次元位置測定器61で測定されている。すなわち、車両50を基準とするロボット1の3次元座標が、3次元位置測定器61によって正確に測定されている。そして、チルト角を変えた2つの測定面A,Bで、レーザセンサ13が周囲の障害物までの距離を検出する。これにより、測定面A、Bにおける障害物までの距離に応じた距離データが取得される。測定面A、Bにおける距離画像データがそれぞれ取得される。ここではレーザレンジファインダをレーザセンサ13として用いているため、全方位における障害物までの距離が検出される。なお、ジャイロセンサ17の測定によって、揺れが治まったことを検知した後、距離データを測定することが好ましい。また、測定面Aと測定面Bのチルト角は、実際の揺れに応じて決定すれば良い。すなわち、実際に揺れるだろう位置において、揺れる角度にレーザセンサ13を傾ける。もちろん、異なる測定地点では、異なるチルト角で測定しても良い。
【0051】
そして、3次元位置測定器61で測定された測定地点の座標とレーザセンサ13のチルト角とを考慮して、各測定面における地図情報を作成する。これにより、測定面Aにおいて測定された障害物の距離データを含む地図情報と、測定面Bにおいて測定された障害物の距離データを含む地図情報が作成される。例えば、図7に示すように、測定面Aの地図情報を地図情報M1とし、測定面Bの地図情報を地図情報M2とする。ここで、地図情報M1、M2において、障害物の外形が線として示されている。すなわち、地図情報M1,M2に示された線が障害物を示しており、ロボット1が移動する際は、この線を避けて移動する。合成された地図情報M(1+2)が推定用地図情報として使用される。推定用地図情報M(1+2)では、地図情報M1に対して、地図情報M2でしか検出されていない障害物を含む合成領域91が追加されている。
【0052】
このように、足りない障害物の距離データを補完する形で、合成された新たな地図情報を推定用地図情報として作成する。そして、実際にロボット1が車両50内に進入する際に、この推定用地図情報と用いて、自己位置を推定する。すなわち、推定用地図情報と距離画像データとをパターンマッチング処理する。これにより、スロープ54が揺れていなどの外乱があっても、正確に自己位置を推定することができる。揺れなどの外乱があった場合でも、正確に自己位置推定することができる。よって、移動中に揺れが治まるのを待つ必要がなく、安全かつ迅速な移動が可能となる。
【0053】
次に、地図情報の作成方法について、図8を用いて説明する。図8は、地図情報の作成方法を示すフローチャートである。まず、ロボット1の連結位置を基準に、測定地点の座標を計算する(ステップS101)。推定用地図情報の作成に必要な1又は複数の位置を測定地点とする。測定地点としては、スロープ54の上り始めの位置や、車両50内部等がある。ここでは、車両50全体の障害物が含まれるように、測定地点を決定する。すなわち、全ての障害物の情報が推定用地図情報に含まれるようにする。そして、測定地点にレーザセンサを置く(ステップS102)。例えば、手動でロボット1を測定地点まで移動する。ここでは、3次元位置測定器61によって、ロボット1の位置を測定している。このため、ロボット1を測定地点まで正確に移動することができる。測定地点までロボット1を移動したら、レーザセンサ13によって、レーザデータを取得する(ステップS103)。このレーザデータが障害物の距離の情報を含んでいる。
【0054】
そして、座標に紐づいた地図情報を作成する(ステップS104)。すなわち、測定地点の座標と、チルト角を考慮した地図情報を作成する。地図情報は、距離画像データに応じたパターンとなる。そして、測定地点が存在するかしないかを判定する(ステップS105)。すなわち、全ての測定地点の測定が終了するまで、上記の処理を繰り返す。全ての測定地点での測定を終了すると、全ての地図情報を合成して、地図の作成が完了する。すなわち、チルト角の異なる複数の地図情報をマージすることによって、推定用地図情報が作成される。このようにすることで、外乱に強い自己位置推定用の地図を作成することができる。自己位置推定に好適な推定用地図情報を作成することができるため、自己位置推定の精度を向上することができる。
【0055】
上記のように、異なる角度の測定面での位置情報(距離画像データ)を合成して、水平面における推定用地図情報を作成する。もちろん、水平面内の推定用地図情報に限らず、水平面以外の平面の推定用地図情報を作成しても良い。なお、1つの測定地点で3以上のチルト角でレーザデータを取得して、3以上の距離画像データを合成しても良い。なお、一部の測定地点では、1つのチルト角のみでレーザデータを取得しても良い。合成後の地図情報を揺れが大きくなる箇所でのみ使用しても良い。例えば、揺れが大きい、スロープ54の上り始めの周辺でのみ、合成した推定用地図情報を用いる。これら以外の揺れが小さい箇所では、1つのチルト角で測定された地図情報を推定用地図情報として用いる。すなわち、2つのチルト角の地図情報が合成されていない地図情報を推定用地図情報として用いる。これにより、正確に自己位置推定することができる。さらには、角度が同じで、高さの異なる測定面の距離画像データを合成しても良い。
【0056】
実施の形態2.
本実施の形態では、ロボット1の自己位置に応じて、地図を切り替えている。なお、本実施の形態では合成していない地図情報を推定用地図情報として利用している。すなわち、実施の形態1で示した合成後の地図情報ではなく、ある1つのチルト角で測定されたレーザデータに基づく地図情報を推定用地図情報として用いている。
【0057】
本実施の形態における自己位置推定について、図9を用いて説明する。図9は、車両50を移動するロボット1による自己位置推定を説明する図である。図9に示すように、スロープ54を移動している間は、ロボット1の位置に応じて、レーザセンサ13の高さが異なる。例えば、スロープ54の上り始めでは、レーザセンサ13が測定面Cの高さであるが、スロープ54の終わりでは、レーザセンサ13が測定面Dの高さとなる。すなわち、レーザセンサ13のチルト角を一定に保っていたとしても、測定面の高さが徐々に変化していく。よって、測定面Dでは、障害物53を検出することができない。すなわち、レーザセンサ13の測定面が障害物53よりも高くなるため、レーザセンサ13からのレーザ光が障害物53に当たらない。このように、レーザセンサ13が測定面の高さになると、レーザセンサ13の検出結果には、障害物53の情報が含まれなくなってしまう。このように、測定面の高さに応じて、レーザセンサ13で検出できる障害物が変わってくるため、障害物の距離情報が異なってしまうことになる。すなわち、測定面の高さに応じて、距離画像パターンに違いが生じてしまう。
【0058】
従って、本実施形態では、移動環境内のロボット1の自己位置に応じて、使用する推定用地図情報を切り替えている。すなわち、ロボット1の座標に応じて、異なる推定用地図情報を使用する。例えば、図10に示すPA地点までは、推定用地図情報Maを用いる。そして、PA地点からPB地点までは推定用地図情報Mabを用いる。さらに、B地点からC地点までは推定用地図情報Mbcを用い、PC地点からPD地点までは推定用地図情報Mcdを用いる。さらに、D地点を越えると推定用地図情報Mdに切り替える。なお、D地点を越えると、座席が近くなりすぎてしまうため、後ろ側のレーザセンサ14からの測定結果のみを使用して、自己位置推定する。このように、自己位置に応じて、使用するレーザセンサを切り替えることで、自己位置推定の精度を向上することができる。
【0059】
このように、推定された自己位置の座標に応じて、推定用地図情報を切り替える。すなわち、推定された自己位置がしきい値となる座標を越えたら、異なる推定用地図情報に切り替える。これにより、自己位置推定の精度を高くすることができる。例えば、推定用地図情報を切り替える時は、ロボット1の移動を一時的に停止してもよい。すなわち、自己位置の座標がしきい値を越えたら、ロボット1の移動を一時的に停止する。そして、切り替えが完了した後に、ロボット1の移動が再開する。これにより、推定用地図情報を切り替えるタイミングにおいても、自己位置推定の精度を向上することができる。しきい値となる座標は、障害物の位置に応じて予め設定すれば良い。すなわち、レーザセンサ13が障害物を越えたら、推定用地図情報を切り替えればよい。切り替える座標は、実際のロボット1を走行させたときの、自己位置推定結果が良かった位置から設定しても良い。
【0060】
本実施の形態では、地図情報記憶部22には、測定面の高さに応じた推定用地図情報が複数記憶されている。そして、自己位置に応じて、地図情報選択部26が選択する推定用地図情報を切り替える。推定用地図情報を切り替える処理に付いて、図11を用いて説明する。図11は、推定用地図情報を切り替えながら、移動する処理を示すフローチャートである。
【0061】
まず、人がロボット1に乗って、スロープ54の下付近まで移動させる(ステップS201)。そして、レーザセンサ13、14の測定によって自己位置推定を行う(ステップS202)。すなわち、レーザセンサ13、14によって検出された障害物の距離画像データと、推定用地図情報とを比較して、自己位置を推定する。なお、複数の推定用地図情報のうち、予め1つの推定用地図情報を最初に用いる設定しておく。例えば、図10に示す例では、推定用地図情報Maを最初に用いる推定用地図情報として設定しておく。
【0062】
そして、自己位置推定ができているか否か判定し(ステップS203)、推定できるまで上記の処理を繰り返す。自己位置が推定できたら(ステップS203のYES)、ロボット1が移動環境内での移動を開始する。具体的には、レーザセンサ13、14の測定結果によって自己位置を推定しながら、スロープ54又は車両50の内部を移動する(ステップS204)。これにより、前輪11、及び後輪12の駆動モータに指令値が出力される。そして、推定された自己位置が連結位置(移動終点)に到達しているか否かを判定する(ステップS205)。連結位置に到達した場合(ステップS206)、移動を終了する。
【0063】
連結位置に到達していない場合、地図の切り替え地点まで到達しているか否かを判定する(ステップS207)。ここでは、推定された自己位置の座標が所定のしきい値を越えたか否かによって、切り替え地点まで到達したか否かを判定する。切り替え地点まで到達していない場合(ステップS207のNO)、そのまま同じ推定用地図情報を用いてステップS204からの処理を繰り返す。切り替え地点に到達した場合は、自己位置推定する推定用地図情報を切り替える(ステップS208)。そして、切り替えられた推定用地図情報で、ステップS204からの処理を繰り返す。このようにして、ロボット1が車両50内を自律移動していく。
【0064】
このように、車両50を移動環境とすると、ロボット1が前に進めば進むほど、センシングする環境が変わってしまう。よって、ロボット1の自己位置に応じて、異なる高さで取得された推定用地図情報に切り替える。そして、推定用地図情報を切り替えることで、自己位置を精度よく推定することができる。なお、上記の説明では、推定用地図情報は、高さの異なる測定面での測定結果により作成したが、チルト角の異なる測定面での測定結果により作成しても良い。例えば、測定面のチルト角をスロープ54を上る時の角度に合わせればよい。あるいは、高さ、及びチルト角の両方ともが異なる測定面での測定結果に基づいて、推定用地図情報を作成しても良い。
【0065】
本実施の形態では、自己位置に応じて最適な推定用地図情報を選択することができる。これにより、自己位置推定の精度を向上することができる。よって、ウェルキャブ車両内を安全かつ迅速に移動することができる。
【0066】
実施の形態3.
実施の形態3にかかる自己位置推定方法について、図12、及び図13を用いて説明する。図12は、ロボット1がスロープ54を上る様子を示す図である。図13は、本実施形態にかかる自己位置推定方法に用いられる推定用地図情報を説明するための図である。
【0067】
図12に示すように、ロボット1がスロープ54を上る際、スロープ54の撓みなどによって、ロボット1が揺れてしまう。ロボット1が揺れてしまうと、レーザセンサ13の測定面の仰角が変化してしまう。例えば、レーザセンサ13が測定面Eで測定したり、測定面Fで測定したりしてしまう。特にスロープ54の強度不足や、床51の凹凸によってロボット1が揺れる。この揺れが起きると障害物53が検出できずに、天井55を検出してしまう。すなわち、レーザセンサ13からのレーザ光が障害物53に照射されずに、天井55に照射されてしまう。よって、自己位置推定の精度が低下してしまう。
【0068】
そこで、本実施形態では、角度の異なる測定面で測定した測定結果から、それぞれ推定用地図情報を作成する。ここでは、ピッチ方向の揺れの影響を低減するために、複数の推定用地図情報から最適な地図情報を選択する。
【0069】
例えば、図13に示すように、角度変更機構15によってレーザセンサ13のチルト角を変えて、レーザ測定を行う。そして、それぞれの測定における距離画像データに基づいて、推定用地図情報を作成する。具体的には、同じ測定地点で、チルト角を変えてレーザ測定を行う。それぞれの測定結果から、異なる角度の推定用地図情報を作成する。例えば、数度毎にレーザ測定を行う。具体的には、−10°、−5°、0°、+5°、+10°でレーザ測定を行う。さらに、測定地点を変えて、それぞれの測定地点でチルト角を変えてレーザ測定を行う。この場合、地図情報記憶部22には、位置と角度とを紐付けて推定用地図情報が保存される。すなわち、推定用地図情報が測定位置タグと角度タグとともに地図情報記憶部22に格納される。自己位置推定部23には、測定位置タグ毎、角度タグ毎に推定用地図情報のファイルが格納されている。測定位置、または角度が異なれば、異なるファイルとして、推定用地図情報を地図情報記憶部22が記憶する。
【0070】
そして、地図情報記憶部22から、推定用地図情報のファイルを読み出して、自己位置推定を行う。ロボット1が車両50に進入する際、ジャイロセンサ17からの出力によって、水平面に対するレーザセンサ13、14の角度を求める。そして、自己位置推定部23は、レーザセンサ13、14の測定面の角度に応じた推定用地図情報を選択する。そして、選択された推定用地図情報を用いて自己位置推定を行う。すなわち、自己位置推定部23は、測定面の角度と同じか近い角度タグを有する推定用地図情報を選択する。さらに、自己位置推定部23は、ロボット1の位置と同じか近い測定位置タグを有する推定用地図情報を選択する。このように、自己位置推定部23は、測定した時の、測定地点位置と、測定面角度に応じた最適な推定用地図情報を選択する。こうすることで、自己位置推定の精度を向上することができる。
【0071】
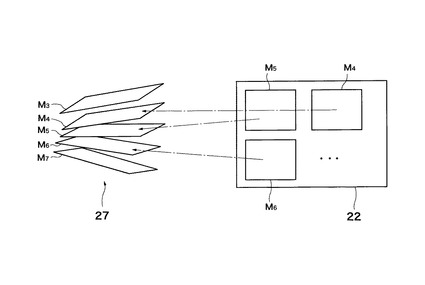
さらに、本実施形態では、処理速度の低下を防ぐため、以下の処理を行っている。まず、自己位置推定部23が、地図情報記憶部22の中から、予め読み出す可能性がある推定用地図情報を複数抽出する。具体的には、推定された自己位置に近い推定用地図情報を抽出する。そして、自己位置推定部23は、抽出された複数の推定用地図情報を角度タグ付きでバッファ領域27に移動させる(図14)。図14は、地図情報記憶部22から推定用地図情報M3〜推定用地図情報M7が抽出されて、バッファ領域27に格納される。ジャイロセンサ17が所定の角度になった瞬間に、1つの推定用地図情報を演算領域に移動させる。すなわち、地図情報選択部26がジャイロセンサ17が検出した測定面の角度と一致する角度タグを有する推定用地図情報を選択する。この処理を行うことで、自己位置推定処理の遅延を回避することができる。なお、読み出す可能性に対する判断は、位置タグを用いればよい。すなわち、現在の推定自己位置に最も近い位置タグの推定用地図情報をバッファ領域27に格納すれば良い。
【0072】
次に、本実施形態にかかる自己位置推定方法について、図15を用いて説明する。図15は、本実施形態に係る自己位置推定方法を示すフローチャートである。なお、本実施の形態にかかる自己位置推定方法は、基本的なフローは実施の形態1、2と同様であるため、適宜説明を省略する。
【0073】
実施の形態2と同様に、人がスロープ下付近まで移動させ(ステップS301)、レーザ自己位置推定を行う(ステップS302)。そして、自己位置推定ができたら(ステップS303のYES)、レーザで自己位置推定ながら、スロープ54、車両50の内部を移動する(ステップS304)。ここまでの処理は、実施の形態2で示したステップS201〜ステップS204の処理と同様であるため説明を省略する。
【0074】
そして、ジャイロセンサ17と連動して、動的に地図を切り替える処理を行う(ステップS305)。ステップS305では、ジャイロセンサ17の測定結果に応じて、バッファ領域27の中の推定用地図情報から、最適な角度タグの推定用地図情報が選択される。その後、連結位置に到達しているか判定し(ステップS306)。ステップS306〜ステップS309までの処理は、実施の形態2で示したステップS205〜ステップS208までの処理と同様であるため説明を省略する。そして、実施の形態2と同様に、自己位置に応じて、自己位置推定する推定用地図情報を切り替えたら(ステップS209)、同一位置で、測定角度の違う推定用地図情報をバッファ領域27に展開する。そして、ステップS304に戻り、レーザ自己位置推定しながら、スロープ54、車両50の内部を移動する。
【0075】
次に、図16を用いて、ジャイロセンサの出力と連動して、動的に推定用地図情報を切り替える処理に付いて説明する。図16は、この処理を示すフローチャートである。まず、ジャイロセンサ17から、現在のロボット角度を取得する(ステップS401)。すなわち、ロボット1の本体10の角度を測定する。これにより、レーザセンサ13、14の測定面の角度を求めることができる。ここで、測定面の角度は、水平面を0°とする。そして、バッファ領域27内に、ジャイロセンサ17で取得した角度の推定用地図情報が存在するか否かを判定する(ステップS402)。すなわち、予めバッファ領域27に抽出された複数の推定用地図情報の角度タグを参照して、測定面と一致する角度タグがあるか否かを判定する。
【0076】
一致する角度タグの推定用地図情報が存在する場合(ステップS402のYES)、その角度に紐付いた推定用地図情報を引き出す(ステップS403)。これにより、1つの推定用地図情報が演算領域に移動する。そして、引き出した推定用地図情報とレーザデータで自己位置推定を行う(ステップS404)。すなわち、レーザセンサ13、14で測定した距離画像データと、推定用地図情報のパターンマッチングによって、自己位置を推定する。一方、一致する角度タグの推定用地図情報が存在しない場合は、初期設定されている推定用地図情報で自己位置推定を行う(ステップS405)。このようにすることで、同じ角度のパターンで自己位置推定することができるため、推定精度を向上することができる。
【0077】
本実施の形態では、測定面角度、又は自己位置に応じて最適な推定用地図情報を選択することができる。これにより、自己位置推定の精度を向上することができる。よって、ウェルキャブ車両内を安全かつ迅速に移動することができる。
【0078】
実施の形態4.
本実施の形態では、推定用地図情報の一部の領域に、障害物の位置を動的に変化できる領域を設けておく。そして、レーザ測定の結果によって、動的領域内の障害物の位置を決定する。例えば、車両50内では、シートの位置や姿勢が変化することがある。このような場合、シートの位置や姿勢が、予め記憶された推定用地図情報の情報と異なってしまう。本実施の形態では、シート等の障害物の位置・姿勢の違いを吸収して、正確に自己位置推定を行う方法を提供する。
【0079】
例えば、図17に示すように、領域R1、R2を障害物の位置が変化する動的領域とする。一方、領域R3,R4を障害物の位置が変化しない静的領域とする。具体的には、パッセンジャーシートの可動範囲を領域R1とし、セカンドシートの可動範囲を領域R2として設定する。これらのシートは、位置、姿勢が変化するため、ロボット1が同じ位置に存在する場合でも、障害物までの距離が変化することがある。領域R3、R4は例えば、車両50のボディの内壁等に相当する。
【0080】
地図情報記憶部22は、領域R1、R2を動的領域とする推定用地図情報を予め記憶している。動的領域では、障害物が存在していないとする。すなわち、領域R1、R2を除いた移動環境に対して障害物が存在する推定用地図情報を作成しておく。そして、レーザセンサ13、14による最初の測定結果に基づいて、領域R1、R2の障害物の位置を測定する。そして、予め記憶している推定用地図情報に対して、領域R1、R2における障害物の距離画像データを合成する。すなわち、地図情報作成部21が距離画像データの一部を切り出して、既に地図情報記憶部22記憶されている推定用地図情報にマージする。これにより、動的領域における障害物の座標が確定した推定用地図情報を作成することができる。
【0081】
具体的には、図18に示すように、領域R1,R2を障害物が全くない動的領域とする推定用地図情報M8が地図情報記憶部22に記憶されている。そして、自己位置推定部23が1回目のレーザ測定での距離画像データM9を、推定用地図情報M8とマッチングする。これにより、推定用地図情報における自己位置が推定される。そして、推定された自己位置に基づいて、領域R1,R2内の障害物の距離画像データを抽出する。すなわち、距離画像データ中から、領域R1、R2の距離画像データを取り出す。従って、領域R1,R2に配置された障害物の距離に応じた、領域R1,R2の距離画像データが抽出される。そして、領域R1,R2の距離画像データを推定用地図情報M8に合成する。これにより、動的領域における障害物の距離データが確定した推定用地図情報M10が作成される。この後は、推定用地図情報M10を用いて自己位置推定を行う。すなわち、推定用地図情報M8にR1、R2の距離画像データM9がマージされた推定用地図情報M10に基づいて、自己位置が推定される。これにより、可動する障害物がある移動環境においても、自己位置推定の精度を向上することができる。
【0082】
次に、図19を用いて、本実施形態にかかる自己位置推定方法について説明する。図19は、自己位置推定方法を示すフローチャートである。また、図19に示す自己位置推定方法では、実施の形態2で示した自己位置推定方法を利用している。すなわち、自己位置に応じて推定用地図情報を切り替えている。従って、実施の形態1、2で説明した内容については、適宜説明を省略する。具体的には、図19に示すステップS501〜ステップS503が図11のステップS201〜ステップS203に対応する。
【0083】
ここで、ステップS502では、動的領域の障害物を除いた推定用地図情報によって自己位置推定を行う。従って、自己位置推定ができたら(ステップS503のYES)、座席位置の地図を動的に作成する(ステップS504)。すなわち、自己位置推定に用いた距離画像データM9から、領域R1,R2の距離画像データを抽出し、動的領域の障害物を除いた推定用地図情報M8と合成する。これにより、推定用地図情報M10が作成される。推定用地図情報10では、領域R1,R2内の障害物の位置が確定している。
【0084】
そして、レーザセンサ13、14の測定結果によって自己位置を推定しながら、スロープ54上、又は車両50の内部を移動する(ステップS505)。これ以降のステップS506〜ステップS509は、実施の形態2で示したステップS205〜ステップS208と同様であるため説明を省略する。
【0085】
本実施の形態ではステップS504でレーザ測定の結果から推定用地図情報を作成している。ここでは、一度のレーザ測定結果から、切り替えに用いられる全ての推定用地図情報を作成しているが、一部の推定用地図情報を作成しても良い。この場合、別のレーザ測定結果から推定用地図情報を作成するようにする。
【0086】
次に、動的領域の障害物情報を加えた推定用地図情報の作成について、図20を用いて説明する。図20は、推定用地図情報を作成する方法を示すフローチャートである。先ず、ステップS504の処理となった段階で、予め作成した推定用地図情報とレーザデータのマッチング処理を行う(ステップS601)。すなわち、レーザ測定による距離画像データを、動的領域の障害物を除いた推定用地図情報にマッチングさせる。
【0087】
次に、動的領域内のレーザデータを算出する(ステップS602)。ここでは、例えば、動的領域内における障害物の座標が算出される。そして、動的領域内に障害物のデータが存在するか否かを判定する(ステップS603)。動的領域内に障害物のデータがあり場合(ステップS603のYES)、対象となる障害物のデータをメモリから切り取る(ステップS604)。すなわち、動的領域内の障害物の座標を抽出する。そして、予め作成していた推定用地図情報に、メモリから切り出したデータを上書きする。これにより、推定用地図情報に、動的領域内の障害物の情報が追加される。そして、障害物の情報が追加された推定用地図情報を用いて、図19で示した自己位置推定を行う。一方、動的領域に障害物のデータがない場合(ステップS603のNO)、マージ処理を行わず、次の処理に移行するステップ(S606)。すなわち、ステップS601で推定に用いられた推定用地図情報がそのまま使用される。
【0088】
このように、障害物の位置・姿勢が動的に変化する領域を動的領域とする。そして、動的領域では障害物のレーザデータを推定用地図情報に合成する。このようにすることで、正確な障害物の情報を有する推定用地図情報を利用することができる。よって、高精度で、自己位置推定することができる。なお、上記の説明では、動的領域をシートの可動範囲としてが、他の障害物の可動範囲を動的領域としてもよい。もちろん、その障害物が動くことができる最大の範囲を動的領域として設定すればよい。
【0089】
なお、上記の実施の形態1乃至4は、適宜組み合わせて実施してもよく、別々に実施しても良い。例えば、実施の形態1で作成した推定用地図情報を用いて地図情報を作成し、その推定用地図情報を用いて実施の形態2、3、4の自己位置推定方法で自己位置推定する。さらには、実施の形態2、3、及び4のうちの、2つ以上の自己位置推定方法を組み合わせも良く、それぞれ別個に用いてもよい。
【0090】
実施形態1乃至4に示された方法によって、自己位置推定精度を向上することができる。例えば、揺れが大きい移動環境や、フロアの凹凸がある移動環境、スロープを上る移動環境等の場合、外乱が生じやすいが、上記の方法によってロバスト性を向上することができる。さらに、移動環境自体に特別な装置やセンサを用いる必要がなくなる。このように、上記の方法は、ウェルキャブ車両内への進入など、外乱の大きい移動環境に対して好適である。さらに3次元を測定するセンサを用いる必要がないため、小型化などを図ることができる。すなわち、2次元の測定面を測定するセンサを用いることでロボット1を小型化、軽量化することができる。さらに、2次元の情報を用いているため、演算時間を短縮することができる。
【符号の説明】
【0091】
1 ロボット
10 本体
11 前輪
12 後輪
13 レーザセンサ
14 レーザセンサ
15 角度変更機構
16 制御部
17 ジャイロセンサ
21 地図情報作成部
22 地図情報記憶部
23 自己位置推定部
24 駆動制御部
25 チルト角制御部
26 地図情報選択部
27 バッファ領域
50 車両
51 床
52 障害物
53 障害物
54 スロープ
55 天井
61 3次元位置測定器
91 合成領域
【特許請求の範囲】
【請求項1】
移動環境内の推定用地図情報に基づいて自己位置を推定して、前記移動環境内を移動する自律移動体であって、
周囲の障害物までの距離に応じた距離データを測定するセンサ部と、
前記移動環境内の障害物の配置に応じた2次元の推定用地図情報を複数記憶する地図情報記憶部であって、前記移動環境の異なる測定面での推定用地図情報を記憶する地図情報記憶部と、
前記自己位置又は前記センサ部の測定角度に基づいて、前記地図情報記憶部に記憶された複数の推定用地図情報の中から1つの推定用地図情報を選択する地図情報選択部と、
前記地図情報選択部で選択された推定用地図情報と前記センサ部で測定された距離データとに基づいて、自己位置を推定する自己位置推定部と、を備えた自律移動体。
【請求項2】
前記センサ部の測定角度を測定する角度センサをさらに備え、
前記地図情報記憶部が異なる角度の測定面の推定用地図情報を記憶しており、
前記角度センサの測定結果に応じて、前記位置情報選択部が前記推定用地図情報を選択する請求項1に記載の自律移動体。
【請求項3】
前記自己位置推定部で推定された自己位置が所定の位置を越えたら、前記地図情報選択部が選択する推定用地図情報を切り替える請求項1、又は2に記載の自律移動体。
【請求項4】
前記移動環境内の障害物の位置に応じて、前記推定用地図情報を切り替える位置が予め設定されている請求項3に記載の自律移動体。
【請求項5】
前記推定用地図情報を切り替える時に、前記自律移動体の移動が停止することを特徴とする請求項3、又は4に記載の移動体。
【請求項6】
前記距離データに応じた距離画像データと、前記推定用地図情報とをパターンマッチングして、自己位置を推定する請求項1乃至5のいずれか1項に記載の自律移動体。
【請求項7】
移動環境内の推定用地図情報に基づいて自己位置を推定して、前記移動環境内を移動する自律移動体であって、
周囲の障害物までの距離を測定するセンサ部と、
前記移動環境内の障害物の配置に応じた2次元の推定用地図情報を記憶する地図情報記憶部と、
前記自律移動体の移動中に前記センサ部で測定された距離に基づく距離画像データを切り出して、前記推定用地図情報に合成する地図情報作成部と、
前記距離画像データが合成された前記推定用地図情報と、合成した後の前記センサ部の測定結果と、に基づいて、自己位置を推定する自己位置推定部と、を備える自律移動体。
【請求項8】
前記移動環境の一部の領域に対応して、前記距離画像データが切り出され、
前記移動環境の前記一部の領域が、前記障害物の可動範囲に基づいて設定されている請求項7に記載の自律移動体。
【請求項9】
移動環境内の自己位置推定に用いられる推定用地図情報を作成する地図情報作成システムであって、
所定の測定面において、前記移動環境の障害物までの距離を測定するセンサ部と、
前記移動環境における前記センサ部の位置を測定する位置測定部と、
前記センサ部の測定面の角度を変更する角度変更機構と、
異なる角度の測定面において前記センサ部が測定した距離に応じた距離画像データを合成して、前記推定用地図情報を作成する地図情報作成部と、を備える地図情報作成システム。
【請求項10】
移動環境内の推定用地図情報に基づいて自己位置を推定する移動体における自己位置推定方法であって、
周囲の障害物までの距離に応じた距離データを測定するステップと、
前記移動環境内の障害物の配置に応じた2次元の推定用地図情報が異なる測定面毎に記憶された地図情報記憶部から、前記移動体の位置又は姿勢に基づいて、1つの推定用地図情報を選択するステップと、
選択された前記推定用地図情報と、前記距離データと、に基づいて自己位置を推定するステップと、を備える自己位置推定方法。
に基づいて自己位置を推定するステップと、を備える自己位置推定方法。
【請求項11】
前記距離データを測定するセンサ部の測定角度を測定するステップをさらに備え、
前記地図情報記憶部が異なる角度の測定面の推定用地図情報を記憶しており、
前記測定角度に応じて、前記推定用地図情報を選択する請求項10に記載の自己位置推定方法。
【請求項12】
推定された前記自己位置が、所定の位置を越えたら、別の推定用地図情報に切り替える請求項10、又は11に記載の自己位置推定方法。
【請求項13】
前記移動環境内の障害物の位置に応じて、前記推定用地図情報を切り替える位置が予め設定されている請求項12に記載の自己位置推定方法。
【請求項14】
前記推定用地図情報を切り替える時に、前記自律移動体の移動が停止することを特徴とする請求項12、又は13に記載の自己位置推定方法。
【請求項15】
前記距離データに応じた距離画像データと、前記推定用地図情報とをパターンマッチングして、自己位置を推定する請求項10乃至14のいずれか1項に記載の自己位置推定方法。
【請求項16】
移動環境内の推定用地図情報に基づいて自己位置を推定する移動体における自己位置推定方法であって、
周囲の障害物までの距離を測定するステップと、
前記自律移動体の移動中に前記センサ部で測定された距離に基づく距離画像データを切り出して、推定用地図情報に合成するステップと、
前記距離画像データが合成された前記推定用地図情報と、合成した後の前記センサ部の測定結果とに基づいて、自己位置を推定するステップと、を備える自己位置推定方法。
【請求項17】
前記移動環境の一部の領域に対応して、前記距離画像データが切り出され、
前記移動環境の前記一部の領域が、前記障害物の可動範囲に基づいて設定されている請求項16に記載の自己位置推定方法。
【請求項18】
移動環境内の自己位置推定に用いられる推定用地図情報を作成する地図情報作成方法であって、
所定の測定面において、前記移動環境の障害物までの距離を測定するステップと、
前記移動環境における前記センサ部の位置を測定するステップと、
前記センサ部の測定面の角度を変更するステップと、
異なる角度の測定面において前記センサ部が測定した距離に応じた距離画像データを合成して、推定用地図情報を作成するステップと、を備える地図情報作成方法。
【請求項1】
移動環境内の推定用地図情報に基づいて自己位置を推定して、前記移動環境内を移動する自律移動体であって、
周囲の障害物までの距離に応じた距離データを測定するセンサ部と、
前記移動環境内の障害物の配置に応じた2次元の推定用地図情報を複数記憶する地図情報記憶部であって、前記移動環境の異なる測定面での推定用地図情報を記憶する地図情報記憶部と、
前記自己位置又は前記センサ部の測定角度に基づいて、前記地図情報記憶部に記憶された複数の推定用地図情報の中から1つの推定用地図情報を選択する地図情報選択部と、
前記地図情報選択部で選択された推定用地図情報と前記センサ部で測定された距離データとに基づいて、自己位置を推定する自己位置推定部と、を備えた自律移動体。
【請求項2】
前記センサ部の測定角度を測定する角度センサをさらに備え、
前記地図情報記憶部が異なる角度の測定面の推定用地図情報を記憶しており、
前記角度センサの測定結果に応じて、前記位置情報選択部が前記推定用地図情報を選択する請求項1に記載の自律移動体。
【請求項3】
前記自己位置推定部で推定された自己位置が所定の位置を越えたら、前記地図情報選択部が選択する推定用地図情報を切り替える請求項1、又は2に記載の自律移動体。
【請求項4】
前記移動環境内の障害物の位置に応じて、前記推定用地図情報を切り替える位置が予め設定されている請求項3に記載の自律移動体。
【請求項5】
前記推定用地図情報を切り替える時に、前記自律移動体の移動が停止することを特徴とする請求項3、又は4に記載の移動体。
【請求項6】
前記距離データに応じた距離画像データと、前記推定用地図情報とをパターンマッチングして、自己位置を推定する請求項1乃至5のいずれか1項に記載の自律移動体。
【請求項7】
移動環境内の推定用地図情報に基づいて自己位置を推定して、前記移動環境内を移動する自律移動体であって、
周囲の障害物までの距離を測定するセンサ部と、
前記移動環境内の障害物の配置に応じた2次元の推定用地図情報を記憶する地図情報記憶部と、
前記自律移動体の移動中に前記センサ部で測定された距離に基づく距離画像データを切り出して、前記推定用地図情報に合成する地図情報作成部と、
前記距離画像データが合成された前記推定用地図情報と、合成した後の前記センサ部の測定結果と、に基づいて、自己位置を推定する自己位置推定部と、を備える自律移動体。
【請求項8】
前記移動環境の一部の領域に対応して、前記距離画像データが切り出され、
前記移動環境の前記一部の領域が、前記障害物の可動範囲に基づいて設定されている請求項7に記載の自律移動体。
【請求項9】
移動環境内の自己位置推定に用いられる推定用地図情報を作成する地図情報作成システムであって、
所定の測定面において、前記移動環境の障害物までの距離を測定するセンサ部と、
前記移動環境における前記センサ部の位置を測定する位置測定部と、
前記センサ部の測定面の角度を変更する角度変更機構と、
異なる角度の測定面において前記センサ部が測定した距離に応じた距離画像データを合成して、前記推定用地図情報を作成する地図情報作成部と、を備える地図情報作成システム。
【請求項10】
移動環境内の推定用地図情報に基づいて自己位置を推定する移動体における自己位置推定方法であって、
周囲の障害物までの距離に応じた距離データを測定するステップと、
前記移動環境内の障害物の配置に応じた2次元の推定用地図情報が異なる測定面毎に記憶された地図情報記憶部から、前記移動体の位置又は姿勢に基づいて、1つの推定用地図情報を選択するステップと、
選択された前記推定用地図情報と、前記距離データと、に基づいて自己位置を推定するステップと、を備える自己位置推定方法。
に基づいて自己位置を推定するステップと、を備える自己位置推定方法。
【請求項11】
前記距離データを測定するセンサ部の測定角度を測定するステップをさらに備え、
前記地図情報記憶部が異なる角度の測定面の推定用地図情報を記憶しており、
前記測定角度に応じて、前記推定用地図情報を選択する請求項10に記載の自己位置推定方法。
【請求項12】
推定された前記自己位置が、所定の位置を越えたら、別の推定用地図情報に切り替える請求項10、又は11に記載の自己位置推定方法。
【請求項13】
前記移動環境内の障害物の位置に応じて、前記推定用地図情報を切り替える位置が予め設定されている請求項12に記載の自己位置推定方法。
【請求項14】
前記推定用地図情報を切り替える時に、前記自律移動体の移動が停止することを特徴とする請求項12、又は13に記載の自己位置推定方法。
【請求項15】
前記距離データに応じた距離画像データと、前記推定用地図情報とをパターンマッチングして、自己位置を推定する請求項10乃至14のいずれか1項に記載の自己位置推定方法。
【請求項16】
移動環境内の推定用地図情報に基づいて自己位置を推定する移動体における自己位置推定方法であって、
周囲の障害物までの距離を測定するステップと、
前記自律移動体の移動中に前記センサ部で測定された距離に基づく距離画像データを切り出して、推定用地図情報に合成するステップと、
前記距離画像データが合成された前記推定用地図情報と、合成した後の前記センサ部の測定結果とに基づいて、自己位置を推定するステップと、を備える自己位置推定方法。
【請求項17】
前記移動環境の一部の領域に対応して、前記距離画像データが切り出され、
前記移動環境の前記一部の領域が、前記障害物の可動範囲に基づいて設定されている請求項16に記載の自己位置推定方法。
【請求項18】
移動環境内の自己位置推定に用いられる推定用地図情報を作成する地図情報作成方法であって、
所定の測定面において、前記移動環境の障害物までの距離を測定するステップと、
前記移動環境における前記センサ部の位置を測定するステップと、
前記センサ部の測定面の角度を変更するステップと、
異なる角度の測定面において前記センサ部が測定した距離に応じた距離画像データを合成して、推定用地図情報を作成するステップと、を備える地図情報作成方法。
【図1】



【図2】
【図3】
【図4】
【図5】

【図6】
【図7】
【図8】

【図9】
【図10】

【図11】

【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】

【図19】
【図20】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【公開番号】特開2011−209845(P2011−209845A)
【公開日】平成23年10月20日(2011.10.20)
【国際特許分類】
【出願番号】特願2010−74905(P2010−74905)
【出願日】平成22年3月29日(2010.3.29)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【出願人】(000003609)株式会社豊田中央研究所 (4,200)
【Fターム(参考)】
【公開日】平成23年10月20日(2011.10.20)
【国際特許分類】
【出願日】平成22年3月29日(2010.3.29)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【出願人】(000003609)株式会社豊田中央研究所 (4,200)
【Fターム(参考)】
[ Back to top ]