
自律移動支援システムとその制御方法
【課題】移動端末あるいは基準局から発信する無線信号を、複数の中継手段によって中継しあるいは再発信し、位置特定手段によって受信することで、前記移動端末の位置を高精度で特定できる自律移動支援システムを提供する。
【解決手段】位置特定手段において移動端末の位置を特定し、あるいは位置特定手段において自局の位置を特定するシステムにおいて、無線信号が同一周波数であり、時分割でかつバースト信号として間欠発信するための、移動端末あるいは基準局と、前記移動端末あるいは基準局から発信される無線信号を中継しあるいは再発信するための中継手段と、位置を特定するための位置特定手段とから構成される。
【解決手段】位置特定手段において移動端末の位置を特定し、あるいは位置特定手段において自局の位置を特定するシステムにおいて、無線信号が同一周波数であり、時分割でかつバースト信号として間欠発信するための、移動端末あるいは基準局と、前記移動端末あるいは基準局から発信される無線信号を中継しあるいは再発信するための中継手段と、位置を特定するための位置特定手段とから構成される。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、無線マーカと移動端末の各々の側で、移動端末の位置を高精度で特定し、前記特定した位置情報を活用し、前記移動端末を搭載しあるいは携帯する移動体の自律的な移動を支援し、遠隔制御し、あるいは案内誘導を行なう、自律移動支援システムを安価に実現するためのものである。
【背景技術】
【0002】
従来から、移動端末の位置を特定し、前記特定した位置情報を活用して、移動体の自律的な移動を支援するための自律移動支援システムが提案されている。(例えば、特許文献1〜4参照)
【特許文献1】特開2009−082267号公報
【特許文献2】特開2009−145150号公報
【特許文献3】特開2008−193525号公報
【特許文献4】特開2005−351877号公報
【0003】
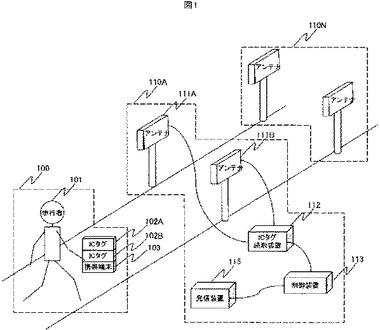
図8は、特許文献1に記載されている従来の「移動支援システム」の実施例である。図8において、実際に歩行した際の軌道まで考慮するために、「移動体に設置された複数のICタグから発信距離の異なる複数のICタグから、第1のデータおよび第2のデータを受信することが可能であって、前記移動体の移動経路に沿って設置された複数のデータ受信手段を用意し、受信した前記複数のデータ受信のそれぞれにおける前記第1のデータおよび前記第2のデータの受信状況に応じて、前記移動体における移動状況を特定する。」ものとされている。
【0004】
しかしながら、移動体に設置されたデータの発信距離の異なる複数のICタグを用いて、データの受信状況に応じて、前記移動体における移動状況を特定する際、移動体でのみ位置の特定を行なうこと、3次元の位置特定ができないこと、遠隔地点からの移動支援や誘導などが出来ないこと、また移動状態を高精度で特定できないこと、移動体の遠隔制御あるいは歩行誘導が出来ない、設置コストが高いこと、などの問題点がある。
【0005】
また、特許文献2では、「移動者の近傍に配置された無線タグから情報を読込んでから、移動者の経路からずれる方向の移動を教える情報を、移動者に提供するまでの時間を短縮するために、「複数の無線タグと移動支援端末とを備える移動支援システムであり、複数の無線タグは、移動者が移動可能な経路の片サイド又は両サイドに沿って配置され、同じサイドで共通する特徴を有する情報が登録されている。
【0006】
移動支援端末は、近傍の無線タグから、無線タグ情報を読込む手段と、移動者の進行方向が登録されている手段と、移動者の進行方向と無線タグ情報の特徴との対応関係の情報を保持する手段と、無線タグ情報と登録されている移動者の進行方向の情報と対応関係情報とに基づいて、移動者の経路からずれる方向の移動を教える情報を生成する手段と、生成した情報を移動者に提供する手段とを有する。」ものとされている。
【0007】
しかしながら、多数の無線タグを近接して設置するのに費用がかかること、設置された複数の無線タグからの情報を白杖を用いて読み取る必要があること、遠隔地点からの移動支援や誘導などが出来ないこと、得られた位置情報の精度が十分でないことなどの問題点がある。
【0008】
また、特許文献3では、自律移動支援システムの基地局の情報設定の作業効率を向上させるため、「サーバ装置100は、標定信号を用いた携帯端末300の現在位置の標定に利用され基地局200に記憶させる情報である設定情報を基地局200のネットワークアドレスに対応づけて記憶する。基地局200は、サーバ装置100に自身のネットワークアドレスを送信し、サーバ装置100は、ネットワークアドレスを受信すると対応する設定情報を基地局200にダウンロードし、基地局200は設定情報を受信して記憶する。
【0009】
また基地局200は、RSSI回路を有し、既設基地局200からの固定出力の試験電波の自由空間損失により既設基地局200からの相対距離を求め、これと既設基地局200の設定情報と標定信号による位置標定の結果とに基づいて自身が記憶すべき設定情報を自動生成する機能を有する。」ものとされている。
【0010】
しかしながら、携帯端末300の現在位置の標定方法についての記述がされていないこと、また、基地局200間の相対距離を既設基地局200からの固定出力の試験電波の自由空間損失により求めていることから、標定精度あるいは距離の測定精度が低いことが、精密な移動支援を行なうのに十分でない問題点がある。
【0011】
また、特許文献4では、アクテイブタグが位置する方向および当該アクテイブタグと携帯端末の距離を精度良く検知して歩行者あるいはロボット等の自律的な移動を支援するために、「アクテイブタグ1の指向性アンテナの方向31に対向して携帯端末2の指向性アンテナを向け、アクテイブタグ1が高周波信号を発信中に指向性アンテナを切替えた時に受信した高周波信号のタイミングあるいは振幅あるいは周波数あるいは位相あるいはこれらの組合わせの変化をリアルタイムで測定し、当該アクテイブタグ1が位置する方向と当該アクテイブタグと携帯端末との距離を検知することによって、歩行者404が横断歩道403の範囲を逸脱せずに安全に歩行することができる。」とされている。
【0012】
しかしながら、アクテイブタグが位置する方向および当該アクテイブタグと携帯端末の距離を精度良く検知する方法について、具体的に言及されていない問題点がある。
【発明の開示】
【発明が解決しようとする課題】
【0013】
この発明は、無線マーカと移動端末の各々の側で、移動端末の位置を高精度で特定し、前記特定した位置情報を活用し、前記移動端末を搭載しあるいは携帯する移動体の自律的な移動を支援し、遠隔制御し、あるいは案内誘導を行なう、自律移動支援システムを安価に実現するためのものである。
【課題を解決するための手段】
【0014】
この発明に係わる自律移動支援システムでは、前記無線信号を時分割で発信し受信するための、無線マーカと、移動端末とを含み、前記移動端末の移動ルートに沿って、複数の無線マーカを間隔をおいて設置して、アドホックネットワークを構成し、
前記複数の無線マーカの内の、特定の無線マーカをノードとし、前記アドホックネットワークを、別に設けた通信回線を経由して、センタの制御サーバに接続し、前記移動端末と無線マーカが、少なくとも、無線信号を発信し受信するための発信手段と、受信手段と、前記発信手段と受信手段とを制御するための制御手段とを含み、
前記制御手段が、少なくとも、信号生成手段と、信号再生手段と、同期検出手段と、同期発振手段と、位相測定手段と位置算出手段とを有し、
【0015】
前記無線マーカが特定した位置情報を、前記ノードとなる無線マーカを経由して、前記センタの制御サーバに向けて転送し、前記制御サーバによって、前記転送された位置情報を処理し、前記移動体の自律移動を修正し、制御し、あるいは誘導するための指令情報を、前記移動端末に向けて転送し、
前記移動端末が、少なくとも、自局において特定した位置情報を基に移動体の自律移動を制御しあるいは誘導し、かつ前記制御サーバから転送された指令情報を基に移動体の自律移動を修正し、制御し、あるいは誘導することができる。
【発明の効果】
【0016】
本発明の自律移動支援システムでは、無線マーカと移動端末の各々の側で、移動端末の位置を高精度で特定し、前記特定した位置情報を活用し、前記移動端末を搭載しあるいは携帯する移動体の自律的な移動を支援し、遠隔制御し、あるいは案内誘導を行なう、自律移動支援システムを安価に実現することができる。
【発明を実施するための最良の形態】
【0017】
この発明に係わる自律移動支援システムは、図1〜図3および請求項1に本発明の第1の実施の形態を示すように、超音波信号あるいは高周波信号あるいは光信号である無線信号を用いた移動支援システムにおいて、
前記無線信号を時分割で発信し受信するための、無線マーカ1と、移動端末3とを含み、前記移動端末3の移動ルートに沿って、複数の無線マーカ1を間隔をおいて設置して、アドホックネットワーク7を構成し、前記複数の無線マーカ1の内の、特定の無線マーカ1をノードとし、前記アドホックネットワーク7を、別に設けた通信回線を経由して、センタの制御サーバ8に接続し、
【0018】
前記移動端末3と無線マーカ1が、少なくとも、無線信号を発信し受信するための発信手段12と、受信手段13と、前記発信手段12と受信手段13とを制御するための制御手段11とを含み、前記制御手段11が、少なくとも、信号生成手段35、37と、信号再生手段34、40と、同期検出手段39と、同期発振手段36と、位相測定手段33と、位置算出手段32とを有し、
前記複数の無線マーカが、少なくとも、報知信号を含む無線信号を、任意のタイミングでバースト信号として間欠発信し、
【0019】
前記移動端末3が、少なくとも、前記複数の無線マーカ1の内、比較的に大きな受信入力値(RSSI)で受信した無線マーカ1を指定して、位置特定要求信号を含む無線信号を任意のタイミングで発信し、
前記指定された無線マーカ1が、少なくとも、前記位置特定要求信号に含まれる起点信号と、高精度でかつ短時間に同期を確立し、同期を保持した第1の距離測定信号と、別途生成した方向測定信号とを含む無線信号を、複数の指向性アンテナ又は複数の指向性送受波器を周期的に切替えながら、時分割で発信し、
【0020】
前記移動端末3が、少なくとも、
前記無線マーカ1から受信した無線信号から、前記第1の距離測定信号と、方向測定信号とを再生し、前記自局で生成した起点信号をクロック信号として用い、前記再生した第1の距離測定信号の位相を測定して無線マーカからの距離を算出し、前記複数のアンテナ又は複数の送受波器に対応した方向測定信号の位相差を測定して無線マーカが位置する方向を算出して、前記無線マーカとの相対位置を高精度で特定するとともに、
前記再生した第1の距離測定信号と、高精度でかつ短時間に同期を確立し、同期を保持した第2の距離測定信号と、別途生成した方向測定信号とを含む無線信号を、前記移動端末に向けて時分割で発信し、
【0021】
前記無線マーカ1が、少なくとも、前記移動端末3から発信された無線信号を前記複数の指向性アンテナ又は複数の指向性送受波器2a〜2dを周期的に切替えながら受信した無線信号に含まれる第2の距離測定信号と、方向測定信号とを再生し、前記第1の距離測定信号をクロック信号として用い、前記再生した第2の距離測定信号の位相を測定して移動端末からの距離を算出し、前記複数のアンテナ又は複数の送受波器に対応した方向測定信号の位相差を測定して移動端末が位置する方向を算出し、前記移動端末との相対位置を高精度で特定するとともに、
【0022】
前記特定した位置情報を、前記ノードとなる無線マーカを経由して、前記センタの制御サーバ8に向けて転送し、前記制御サーバ8によって、前記転送された位置情報を処理し、前記移動体の自律移動を修正し、制御し、あるいは誘導するための指令情報を、前記移動端末に向けて転送し、
前記移動端末3が、少なくとも、自局において特定した位置情報を基に移動体の自律移動を制御しあるいは誘導し、かつ前記制御サーバ8から転送された指令情報を基に移動体の自律移動を修正し、制御し、あるいは誘導することができる。
【0023】
また、図1〜図3および請求項2に本発明の第2の実施の形態を示すように、 超音波信号あるいは高周波信号あるいは光信号である無線信号を用いた移動支援システムにおいて、
前記無線信号を時分割で発信し受信するための、無線マーカと、移動端末とを含み、前記移動端末の移動ルートに沿って、複数の無線マーカを間隔をおいて設置して、アドホックネットワークを構成し、前記複数の無線マーカの内の、特定の無線マーカをノードとし、前記アドホックネットワークを、別に設けた通信回線を経由して、センタの制御サーバに接続し、
【0024】
前記移動端末と無線マーカが、少なくとも、無線信号を発信し受信するための発信手段と、受信手段と、前記発信手段と受信手段とを制御するための制御手段とを含み、前記制御手段が、少なくとも、信号生成手段と、信号再生手段と、同期検出手段と、同期発振手段と、位相測定手段と位置算出手段とを有し、
前記移動端末が、少なくとも、位置特定要求信号の発信を要求するための発信要求信号を含む無線信号を、任意のタイミングでバースト信号として間欠発信し、
【0025】
前記複数の無線マーカの内、規定値以上の受信入力値で受信した無線マーカが、少なくとも、前記受信入力値を、前記特定の無線マーカを経由して、前記制御サーバに向けて転送し、
前記制御サーバが、少なくとも、前記転送された受信入力値を基に、無線マーカを指定して、前記位置特定要求信号の発信を指令し、
前記指定された無線マーカが、少なくとも、前記発信要求信号に同期して、前記位置特定要求信号を含む無線信号を、前記移動端末に向けて発信し、
【0026】
前記移動端末が、少なくとも、前記位置特定要求信号に含まれる起点信号と、高精度でかつ短時間に同期を確立し、同期を保持した第1の距離測定信号と、別途生成した方向測定信号とを含む無線信号を、前記無線マーカに向けて時分割で発信し、
前記無線マーカが、少なくとも、複数の指向性アンテナ又は複数の指向性送受波器を周期的に切替えながら、受信した無線信号から、前記第1の距離測定信号と、方向測定信号とを再生し、前記自局で生成した起点信号をクロック信号として用い、前記再生した第1の距離測定信号の位相を測定して移動端末からの距離を算出し、前記複数のアンテナ又は複数の送受波器に対応した方向測定信号の位相差を測定して移動端末が位置する方向を算出して、前記移動端末との相対位置を高精度で特定するとともに、
【0027】
前記再生した第1の距離測定信号と、高精度でかつ短時間に同期を確立し、同期を保持した第2の距離測定信号と、別途生成した方向測定信号とを含む無線信号を、前記複数の指向性アンテナ又は複数の指向性送受波器を周期的に切替えながら、前記移動端末に向けて時分割で発信し、
前記移動端末が、少なくとも、前記無線マーカから、発信された無線信号に含まれる第2の距離測定信号と、方向測定信号とを再生し、前記第1の距離測定信号をクロック信号として用い、前記再生した第2の距離測定信号の位相を測定して移動端末からの距離を算出し、前記複数のアンテナ又は複数の送受波器に対応した方向測定信号の位相差を測定して移動端末が位置する方向を算出して、前記無線マーカとの相対位置を高精度で特定するとともに、
【0028】
前記指定された無線マーカが特定した位置情報を、前記ノードとなる無線マーカを経由して、前記センタの制御サーバに向けて転送し、前記制御サーバによって、前記転送された位置情報を処理し、前記移動体の自律移動を修正し、制御し、あるいは誘導するための指令情報を、前記移動端末に向けて転送し、
前記移動端末が、少なくとも、自局において特定した位置情報を基に移動体の自律移動を制御しあるいは誘導し、かつ前記制御サーバから転送された指令情報を基に移動体の自律移動を修正し、制御し、あるいは誘導することができる。
【0029】
また、請求項3に示すように、前記起点信号、距離測定信号、もしくはこれらの両方が、単一もしくは同期しあるいは直交する複数の、搬送波信号、副搬送波信号、変調信号、スペクトル拡散符号、もしくはこれらの組合せであるものとする。
また、請求項4に示すように、前記信号再生手段において、前記再生する起点信号もしくは距離測定信号が、無線信号の搬送波信号あるいは副搬送波信号である場合には、群遅延歪みの少ない帯域通過フイルタを通し、あるいは無線信号を変調した変調信号である場合には、遅延誤差の少ないアナログ復調器もしくは高い周波数のクロック信号を用いる遅延誤差の少ないデジタル復調器によって復調した後に、前記帯域通過フイルタを通して再生することができる。
【0030】
また、請求項5に示すように、前記同期発振手段が基準発振器によって駆動されるセットあるいはリセット付きのカウンタあるいは数値制御発振器によって構成され、復調されもしくは再生された前記起点信号もしくは位置特定信号の立上がり点、立下がり点、もしくはゼロ交差点のタイミングを、少なくとも16MHz以上の周波数のクロック信号を用いて検出し、前記検出したタイミングで、前記カウンタあるいは数値制御発振器をセットしもしくはリセットすることによって、前記起点信号と短時間で同期を確立し、同期を保持できる。
【0031】
また、請求項6に示すように、前記無線マーカに接続される複数のアンテナ又は送受波器を、前記方向測定信号の1波長以下の間隔で、指向性を下方向または斜め下方向に向けて設置し、前記移動端末に接続される任意の数のアンテナ又は送受波器を、指向性を上方向または斜め上方向に向けて設置するものとする。
また、請求項7に示すように、前記方向測定信号の1波長以上の比較的に広い間隔で移動体に設置した複数のアンテナを、前記移動端末に接続し、周期的に切替えながら位置の特定を行い、アンテナ毎に算出した距離が比較的に短いものを選択し、あるいはアンテナ毎に特定した位置の間隔が、前記移動体に設置したアンテナの間隔に比較的に近く特定したものを選択し、あるいは平均するものとする。
また、請求項8に示すように、前記移動端末が、危険区域内を移動する、作業ロボットあるいは監視ロボットに設置されるものとする。
【0032】
(実施の形態1)
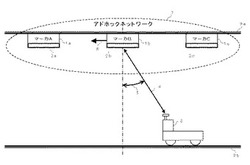
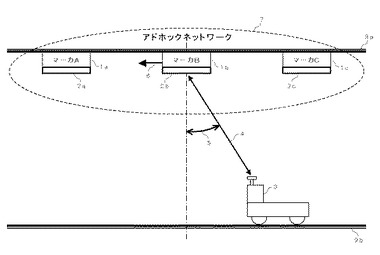
図1は本発明の第1の形態による自律移動支援システムの構成図である。図1において、1a〜1cは無線マーカ、2a〜2d、2oはアンテナ、3は移動端末、4は無線の伝搬経路の距離、5は移動端末3が位置する方向、6はノード、7はアドホックネットワーク、8はセンタの制御サーバ(記載せず)、9aは天井、9bは床面である。
前記複数の無線マーカ1a〜1cを、間隔をおいて天井面に設置して、アドホックネットワーク7を構成し、前記アドホックネットワーク7を、特定の無線マーカ1bをノード6に接続し、別に設けた通信回線(記載せず)を経由して、センタの制御サーバ8(記載せず)に接続する。
【0033】
前記移動端末3と無線マーカ1a〜1cが、少なくとも、無線信号を発信し受信するための発信手段と、受信手段と、前記発信手段と受信手段とを制御するための制御手段とを含み、前記制御手段が、少なくとも、信号生成手段と、信号再生手段と、同期検出手段と、同期発振手段と、位相測定手段と位置算出手段とを有し、前記移動端末3と無線マーカ1a〜1cの各々の側で、移動端末3の位置を高精度で特定することができるものとする。
【0034】
前記無線マーカ1a〜1cが特定した位置情報を、前記ノード6となる無線マーカ1bを経由して、前記センタの制御サーバ8に向けて転送し、前記制御サーバ8によって、前記転送された位置情報を処理し、前記移動体3の自律移動を修正し、制御し、あるいは誘導するための指令情報を、逆方向に、前記ノード6となる無線マーカ1bを経由し、アドホックネットワーク7を経由して、前記移動端末3に向けて転送する。
前記移動端末3が、少なくとも、自局において特定した位置情報を基に、前記移動体の自律移動を制御しあるいは誘導し、かつ前記制御サーバ8から転送された指令情報を基に移動体の自律移動を修正し、制御し、あるいは誘導することができる。
【0035】
ここで、前記移動端末3の位置は、伝搬経路の距離4と、移動端末3が位置する方向とを算出し、瞬時にかつ高精度で、特定することができる。
また、前記無線マーカ1a〜1cに接続される複数のアンテナを、指向性を下方向または斜め下方向に向けて設置し、前記移動端末3に接続される任意の数のアンテナを、指向性を上方向または斜め上方向に向けて設置することで、マルチパスによって生じる位置の特定誤差を軽減することができる。
【0036】
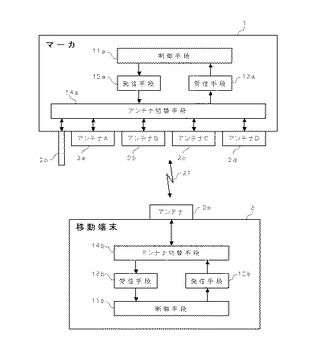
図2は本発明の第1の実施の形態による無線マーカおよび移動端末の構成図であり、1は無線マーカ、3は移動端末、11a、11bは制御手段、12a、12bは発信手段、13a、13bは受信手段、14a、14bはアンテナ切替手段、2a〜2d、2oは無線マーカ1のアンテナ、2eは移動端末3のアンテナ、21は無線の伝搬路である。
【0037】
移動端末3の位置を特定するために、前記無線信号を、20ミリ秒以下のバースト信号として、時分割で発信しかつ受信するための、無線マーカ1と、移動端末3とから構成され、
前記無線マーカ1が、制御手段11aと、発信手段12aと、受信手段13aと、アンテナ切替手段14aと、アンテナ2a〜2d、2oとから構成され、前記移動端末3が、制御手段11bと、発信手段12bと、受信手段13bと、アンテナ切替手段14bと、アンテナ2ebとから構成され、
【0038】
前記発信手段12bから、少なくとも、制御手段11bで生成した起点信号を含む無線信号をアンテナ2eを介して発信し、前記アンテナ2a〜2dのいずれかを介して受信手段13aで受信し、前記制御手段11aにおいて、少なくとも、前記起点信号を再生し、前記再生した起点信号と高精度で同期した第1の距離測定信号と、方向測定信号と生成し、前記生成した第1の距離測定信号と方向測定信号を含む無線信号を、複数のアンテナ2a〜2dを周期的に切替ながら発信手段12aから時分割で発信し、
【0039】
前記無線信号を前記受信手段13bで受信し、前記制御手段11bにおいて、少なくとも、前記第1の距離測定信号と方向測定信号とを再生し、自局で生成した起点信号をクロック信号として用い、前記再生した第1の距離測定信号の位相を測定して無線マーカ1と移動端末3との間の距離を算出し、前記複数のアンテナ2a〜2dに対応して方向測定信号の位相差を測定して無線マーカ3が位置する方向を算出し、前記移動端末3の位置を特定するとともに、前記第1の距離測定信号と高精度で同期した第2の距離測定信号を生成し、
【0040】
前記発信手段12bから、少なくとも、前記制御手段11aにおいて生成した前記第2の距離測定信号と、別に生成した方向測定信号を含む無線信号をアンテナ2eを介して発信し、前記無線信号を複数のアンテナ2a〜2dを周期的に切替えながら、受信手段13aで受信し、前記制御手段11aにおいて、少なくとも、前記第2の距離測定信号を再生し、自局で生成した第1の距離測定信号をクロック信号として用い、前記再生した第2の距離測定信号の位相を測定して無線マーカ1と移動端末3との間の距離を算出し、前記複数のアンテナ2a〜2dに対応して方向測定信号の位相差を測定して無線マーカ3が位置する方向を算出し、前記移動端末3の位置を特定する。
【0041】
なお、前記無線マーカ1と移動端末3との間で位置情報を交換し、両者の平均値を求めることで、位置の算出精度の改善が可能となる。
また、前記に引き続き、前記無線マーカ1と移動端末3との間で相互通信を続けることによって、複数回の距離の算出を行い、これらの平均値を求めることでも、位置の算出精度の改善が可能となる。
また、前記起点信号、距離測定信号、方向測定信号、あるいはこれらの組み合わせが、法令により許容される周波数の範囲内であり、単一もしくは同期しあるいは直交する複数の、搬送波信号、副搬送波信号、変調信号、スペクトル拡散符号、もしくはこれらの任意の組み合わせである。
【0042】
図2は本発明の第1の実施の形態による制御手段の構成図であり、11a、11bは制御手段、31は基準発振器、32は位置算出手段、33は位相測定手段、34は測定信号再生手段、35は起点信号生成手段、36は同期発振器、37は測定信号生成手段、38は位相同期発振器、39は同期検出手段、40は起点信号再生手段、41、42は接続端子である。
【0043】
前記起点信号生成手段35によって、前記基準発振器41に同期し、少なくとも、システム同期信号と、マックレイヤと、法規により許容される周波数範囲の単一もしくは複数の周波数の起点信号とが生成され、接続端子41を介して図1に示す発信手段12a、12bに供給され、その内の起点信号は、位相測定のためのクロック信号として、別途、前記位相測定手段43にも供給される。
【0044】
一方、図1に示す受信手段14a、14bによって受信される無線信号は、直接あるいは中間周波信号に変換され、接続端子42を介して前記起点信号再生手段34もしくは測定信号再生手段40に供され、前記起点信号、距離測定信号、方向測定信号、もしくはこれらの組み合わせが、無線信号の搬送波信号あるいは副搬送波信号である場合には、群遅延歪みの少ない帯域通過フイルタ(例えば、ガウシャンフイルタ)を通し、あるいは無線信号の搬送波信号あるいは副搬送波信号を変調した変調信号である場合には、遅延誤差の少ないアナログ復調器もしくは高い周波数のクロック信号を用いた遅延誤差の少ないデジタル復調器によって復調した後に、前記帯域通過フイルタを通して再生することによって、前記距離の算出誤差を軽減することができる。
【0045】
また、前記測定信号再生手段34によって再生された測定信号は位相測定手段33に供給され、前記自局内で生成した起点信号もしくは同期発振手段36の出力信号の周波数の整数倍もしくは整数分の1の周波数をクロック信号として用い、積和演算器によって、前記測定信号の位相を高精度でリアルタイムで測定し、測定結果を距離算出手段32に出力する。
また、前記距離算出手段32は、例えば、基準発振器31からの供給されるクロック信号によって動作する標準的なマイクロプロセッサであり、前記無線マーカ1と移動端末3との間の距離を高精度で算出する。
【0046】
なお、前記同期発振手段36が基準発振器31(例えば、周波数安定度が±0.5ppm以内のもの)によって駆動されるカウンタあるいは数値制御発振器によって構成され、前記受信手段によって受信され、起点信号再生手段によって復調されもしくは再生された起点信号あるいは測定信号の立上がり点、立下がり点、もしくはゼロ交差点のタイミングを、同期検出手段39によって少なくとも16MHz以上の周波数のクロック信号を用いて検出し、前記検出したタイミングで、前記カウンタあるいは数値制御発振器をセットしもしくはリセットすることによって、前記起点信号と短時間で同期を確立し、かつ前記起点信号あるいは測定信号が消滅した後も、比較的に長時間、同期を保持できる。
【0047】
また、上記では、移動端末3側から、起点信号を含む無線信号を発信する場合について説明したが、逆に、無線マーカ側から、起点信号を含む無線信号を発信する場場合でも同様な効果が得られる。
【0048】
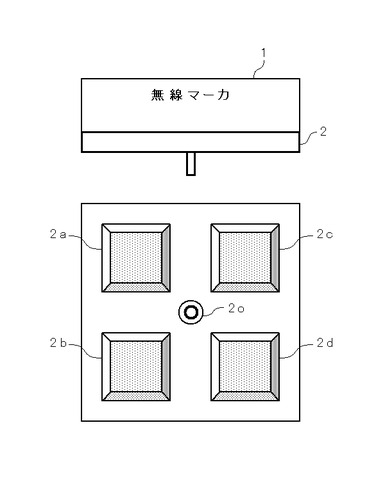
図4は本発明の第1の実施の形態によるアンテナの外観図であり、1は無線マーカ、2はアンテナレドーム、2a〜2dは複数のアンテナ、2oは単一のアンテナである。
前記複数のアンテナ2ba〜2bdは移動端末3の2次元もしくは3次元の位置を特定するために用いられ、通常、高誘電率円偏波セラミックアンテナが用いられ、下方向もしくは斜め下方向に向けて設置される。
一方、アンテナ2oはアドホックネットワークを形成するために用いられ、通常無指向性アンテナが用いられる。前記無線マーカの設置間隔によっては、前記複数のアンテナ2ba〜2bdによって代替することも可能である。
前記アンテナレドーム2は、無線マーカ1とアンテナ2a〜2d、2oとを一体として収納することで、小型化が可能となる。
【0049】
なお、前記複数のアンテナ2ba〜2bdの指向性ビーム幅が広い場合には、前記無指向性アンテナ2oを兼ねることができる。
また、前記無指向性アンテナ2oの取り付け位置は、図4に示した位置以外に、任意の場所に設けることができる。
また、移動端末のアンテナに同様な構造の単一もしくは複数のアンテナを内蔵することで、マルチパスの影響を軽減できる。
また、前記方向測定信号の1波長以上の比較的に広い間隔で、移動体に設置した複数のアンテナを、前記移動端末に接続し、周期的に切替えながら位置の特定を行い、アンテナ毎に算出した距離が比較的に短いものを選択し、あるいはアンテナ毎に特定した位置の間隔が、前記移動体に設置したアンテナに間隔に比較的に近く特定したものを選択し、あるいは平均することで、マルチパスの影響を軽減することができる。
【0050】
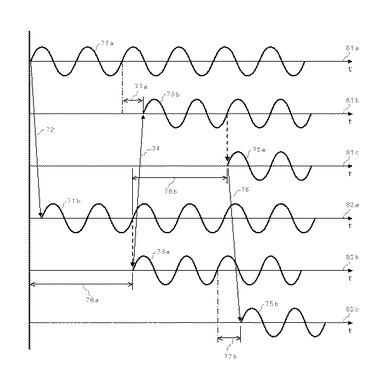
図5は本発明のの自律移動支援システムのタイムチャートであり、71aは移動端末3から発信される起点信号、71bは無線マーカ1によって再生される起点信号、72は前記移動端末3から無線マーカ1に向けて起点信号71aが伝搬する伝搬経路、73aは前記無線マーカによって再生された起点信号71bに同期して生成される第1の距離測定信号、73bは前記移動端末3によって再生された第1の距離測定信号、74は前記無線マーカ1から移動端末3に向けて第1の距離測定信号73aが伝搬する伝搬経路、75aは前記移動端末3で再生される第1の第1の距離測定信号73bに同期して生成された第2の距離測定信号、75bは無線マーカ1で再生された第2の距離測定信号であり、
【0051】
76は前記移動端末3から無線マーカ1に向けて第2の距離測定信号75aが伝搬する伝搬経路、77aは移動端末3から発信される起点信号71aと前記無線マーカ1によって再生される第1の距離測定信号73bとの位相差、77bは無線マーカ1で生成される第1の距離測定信号73aと無線マーカ1で再生される第2の距離測定信号75bとの位相差、78a、78bは時分割の間隔、81a〜81cは前記移動端末3の時間軸、82a〜82cは前記無線マーカ1の時間軸である。
【0052】
前記移動端末3から発信される前記起点信号71aをASin(2πf1t)とすると、前記起点信号71aが、距離L(m)の伝搬経路72を伝搬し、前記無線マーカ1によって受信され、起点信号71bとして再生されると、BSin{2πf1t+(2πLf1/C)}に位相が変化する。
前記再生された起点信号71bと、同期確立誤差がゼロで同期した第1の距離測定信号73aを生成すると、生成された第1の距離測定信号73aは、同じくBSin{2πf1t+(2πLf1/C)}で表される。
【0053】
前記時分割の間隔78a後に、前記生成された第1の距離測定信号73aが、前記無線マーカ1から発信され、再び、距離L(m)の伝搬経路74を伝搬し、前記移動端末3で再生される第1の距離測定信号73bは、CSin{2πf1t+(4πLf1/C)}で表わされる。ここで、Cは光の速度とする。
そこで、前記移動端末3で生成された起点信号71aと同期しあるいは直交し、周波数が前記起点信号の整数倍のクロック信号を用い、前記再生された第1の距離測定信号73bの位相を測定すると、前記移動端末3で生成された起点信号71aと前記移動端末3で再生された第1の距離測定信号73bとの位相差77aが測定され、ΔΦ={4πLf1/C}となることから、L={CΔΦ/4πf1}から、距離L(m)が前記無線マーカの側で算出できる。
【0054】
同様にして、前記移動端末3で前記第1の距離測定信号73bに同期して生成された第2の距離測定信号75aと前記無線マーカ1で生成された際1の距離測定信号73aとの位相差77bが測定され、ΔΦ={4πLf1/C}となることから、L={CΔΦ/4πf1}から、距離L(m)が前記無線マーカ1側で算出できる。
更に、同様なシーケンスを繰返すことによって、前記移動端末3側と前記無線マーカ1側とで、複数回距離L(m)が算出できることから、それぞれの側で、平均値を求めることで、距離の算出精度を高めることができる。
なお、前記算出精度の改善は、主に、前記同期検出手段49における同期確立誤差がランダムに変化することに由来する。
【0055】
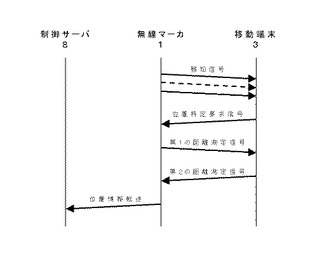
図6は本発明の自律移動支援システムのシーケンス図である。図6において、
前記複数の無線マーカ1a〜1cが、少なくとも、報知信号を含む無線信号を、任意のタイミングでバースト信号として間欠発信しており、
移動端末が、少なくとも、前記複数の無線マーカの内、比較的に大きな受信入力値(RSSI)で受信した無線マーカを指定して、位置特定要求信号を含む無線信号を任意のタイミング(非同期)でバースト信号として発信し、
【0056】
前記指定された無線マーカが、少なくとも、受信した起点信号と同期した第1の距離測定信号を含む無線信号を、前記移動端末に向けて時分割でバースト信号として遅滞無く発信し、
前記移動端末が、自局の位置を算出するとともに、少なくとも、受信した第1の距離測定信号と同期した第2の距離測定信号を含む無線信号を、前記無線マーカに向けて時分割でバースト信号として遅滞無く発信し、
前記無線マーカが、移動端末の位置を算出するとともに、制御サーバに向けて位置情報として転送する。
【0057】
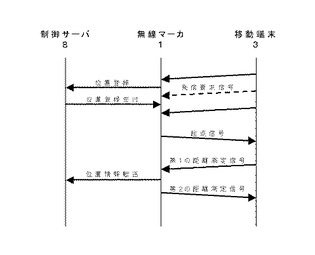
図7本発明の自律移動支援システムの他のシーケンス図である。図7において、
前記移動端末が、少なくとも、位置特定要求信号の発信を要求するための発信要求信号を含む無線信号を、複数の無線マーカ1a〜1cに向けて、任意のタイミング(非同期)でバースト信号として間欠発信し、
前記無線マーカ1a〜1cが、少なくとも、前記発信要求信号を含む無線信号を受信し、受信入力値(RSSI)が規定値を超える無線マーカから、センタの制御サーバに向けて、前記受信入力値を含む位置登録要求信号を転送し、
【0058】
前記制御サーバが、少なくとも、無線マーカ1a〜1cから転送された位置登録信号に含まれる受信入力値を比較して、比較的に大きな受信入力値で受信した無線マーカを指定して、位置登録受付信号を転送し、
前記指定された無線マーカが、少なくとも、前記移動端末に向けて、位置特定要求信号を含む無線信号を任意のタイミングでバースト信号として発信し、
【0059】
前記移動端末が、少なくとも、受信した起点信号と同期した第1の距離測定信号を含む無線信号を、前記無線マーカに向けて時分割でバースト信号として遅滞無く発信し、
前記無線マーカが、前記移動端末の位置を算出して、制御サーバに位置情報として転送するとともに、少なくとも、受信した第1の距離測定信号と同期した第2の距離測定信号を含む無線信号を、前記移動端末に向けて、時分割でバースト信号として遅滞無く発信し、
前記移動端末が、自局の位置を算出する。
【0060】
以上の説明では、前記移動端末あるいは無線マーカから発信される位置特定信号として、単一の周波数の位置特定信号を再発信する場合について説明したが、単一の周波数の位置特定信号を用いる場合、ΔΦの変化を0<ΔΦ<2πに制限する必要があることから、再生された起点信号71bに同期しあるいは直交し少なくとも周波数が異なる複数の位置特定信号を用いると、複数のレンジで位置を特定することが可能となり、特定したい位置にレンジを合わせることで、精密な位置の特定が可能となるメリットが得られる。
【0061】
また、無線信号として、超音波信号、高周波信号、もしくは光信号を用いることができる。なお、超音波信号もしくは光信号の場合には、アンテナの代わりに、送受波器を用いるものとする。
また、超広帯域通信方式(ウルトラワイドバンド)を用いることで、高い周波数の変調信号あるいは高いチップレートの拡散符号を採用できるので、同期しあるいは直交する複数の変調信号あるいは拡散符号を割り当てることが可能となり、複数の測定レンジを設定できることから、30m以内の近距離での位置特定精度を向上させることができる。
【産業上の利用可能性】
【0062】
本発明によれば、前記移動端末を移動可能な移動体に装着しあるいは携帯させ、無線マーカをネットワークで結ぶことで、移動体の正確な位置を移動体側とネットワーク側で同時にリアルタイムで検知できることから、同時に特定した位置情報をもとに、歩行者あるいはロボットなどの自律移動の支援あるいは制御と、センターからの遠隔制御と監視、あるいは案内と誘導などが可能となる。
また、前記移動端末を、原子炉周辺あるいは高圧変電所内などの危険区域内を移動する、作業ロボットあるいは監視ロボットなどに設置し、制御サーバを、安全な監視室に設置することで、人体の安全を確保できる。
【0063】
また、移動端末をRFタグとして流通貨物、あるいは貨物移動用のフオークリフトなどに添付し、複数の無線マーカを流通貨物の移動範囲内に離散的に設置し、前記RFタグからの無線信号を前記無線マーカによって受信することによって、貨物の流通の経路あるいは収納場所などを高精度で特定することによって、貨物の流通の合理化が可能となる。
なお、本発明の位置特定技術は基盤技術であり、上記以外に多分野での利用が期待できる。
【図面の簡単な説明】
【0064】
【図1】本発明の第1の実施の形態による自律移動支援システムの構成図
【図2】本発明の第1の実施の形態による無線マーカおよび移動端末の構成図
【図3】本発明の第1の実施の形態による制御手段の構成図
【図4】本発明の無線マーカのアンテナの外観図
【図5】本発明の自律移動支援システムのタイミングチャート
【図6】本発明の自律移動支援システムの制御シーケンス図
【図7】本発明の自律移動支援システムの他の制御シーケンス図
【図8】従来の実施例を示す構成図
【符号の説明】
【0065】
1a〜1c 無線マーカ
2a〜2d、1o アンテナ
3 移動体
4 無線信号の伝搬路の距離
5 移動体が位置する方向
6 ノード
7 アドホックネットワーク
8(記載せず) 制御サーバ
9a 天井表面
9b 床面
【0066】
101 歩行者
102A、102B ICタグ
103 携帯端末
111A、111B アンテナ
112 ICタグ読取装置
113 制御疎プチ
115 発信装置
【技術分野】
【0001】
この発明は、無線マーカと移動端末の各々の側で、移動端末の位置を高精度で特定し、前記特定した位置情報を活用し、前記移動端末を搭載しあるいは携帯する移動体の自律的な移動を支援し、遠隔制御し、あるいは案内誘導を行なう、自律移動支援システムを安価に実現するためのものである。
【背景技術】
【0002】
従来から、移動端末の位置を特定し、前記特定した位置情報を活用して、移動体の自律的な移動を支援するための自律移動支援システムが提案されている。(例えば、特許文献1〜4参照)
【特許文献1】特開2009−082267号公報
【特許文献2】特開2009−145150号公報
【特許文献3】特開2008−193525号公報
【特許文献4】特開2005−351877号公報
【0003】
図8は、特許文献1に記載されている従来の「移動支援システム」の実施例である。図8において、実際に歩行した際の軌道まで考慮するために、「移動体に設置された複数のICタグから発信距離の異なる複数のICタグから、第1のデータおよび第2のデータを受信することが可能であって、前記移動体の移動経路に沿って設置された複数のデータ受信手段を用意し、受信した前記複数のデータ受信のそれぞれにおける前記第1のデータおよび前記第2のデータの受信状況に応じて、前記移動体における移動状況を特定する。」ものとされている。
【0004】
しかしながら、移動体に設置されたデータの発信距離の異なる複数のICタグを用いて、データの受信状況に応じて、前記移動体における移動状況を特定する際、移動体でのみ位置の特定を行なうこと、3次元の位置特定ができないこと、遠隔地点からの移動支援や誘導などが出来ないこと、また移動状態を高精度で特定できないこと、移動体の遠隔制御あるいは歩行誘導が出来ない、設置コストが高いこと、などの問題点がある。
【0005】
また、特許文献2では、「移動者の近傍に配置された無線タグから情報を読込んでから、移動者の経路からずれる方向の移動を教える情報を、移動者に提供するまでの時間を短縮するために、「複数の無線タグと移動支援端末とを備える移動支援システムであり、複数の無線タグは、移動者が移動可能な経路の片サイド又は両サイドに沿って配置され、同じサイドで共通する特徴を有する情報が登録されている。
【0006】
移動支援端末は、近傍の無線タグから、無線タグ情報を読込む手段と、移動者の進行方向が登録されている手段と、移動者の進行方向と無線タグ情報の特徴との対応関係の情報を保持する手段と、無線タグ情報と登録されている移動者の進行方向の情報と対応関係情報とに基づいて、移動者の経路からずれる方向の移動を教える情報を生成する手段と、生成した情報を移動者に提供する手段とを有する。」ものとされている。
【0007】
しかしながら、多数の無線タグを近接して設置するのに費用がかかること、設置された複数の無線タグからの情報を白杖を用いて読み取る必要があること、遠隔地点からの移動支援や誘導などが出来ないこと、得られた位置情報の精度が十分でないことなどの問題点がある。
【0008】
また、特許文献3では、自律移動支援システムの基地局の情報設定の作業効率を向上させるため、「サーバ装置100は、標定信号を用いた携帯端末300の現在位置の標定に利用され基地局200に記憶させる情報である設定情報を基地局200のネットワークアドレスに対応づけて記憶する。基地局200は、サーバ装置100に自身のネットワークアドレスを送信し、サーバ装置100は、ネットワークアドレスを受信すると対応する設定情報を基地局200にダウンロードし、基地局200は設定情報を受信して記憶する。
【0009】
また基地局200は、RSSI回路を有し、既設基地局200からの固定出力の試験電波の自由空間損失により既設基地局200からの相対距離を求め、これと既設基地局200の設定情報と標定信号による位置標定の結果とに基づいて自身が記憶すべき設定情報を自動生成する機能を有する。」ものとされている。
【0010】
しかしながら、携帯端末300の現在位置の標定方法についての記述がされていないこと、また、基地局200間の相対距離を既設基地局200からの固定出力の試験電波の自由空間損失により求めていることから、標定精度あるいは距離の測定精度が低いことが、精密な移動支援を行なうのに十分でない問題点がある。
【0011】
また、特許文献4では、アクテイブタグが位置する方向および当該アクテイブタグと携帯端末の距離を精度良く検知して歩行者あるいはロボット等の自律的な移動を支援するために、「アクテイブタグ1の指向性アンテナの方向31に対向して携帯端末2の指向性アンテナを向け、アクテイブタグ1が高周波信号を発信中に指向性アンテナを切替えた時に受信した高周波信号のタイミングあるいは振幅あるいは周波数あるいは位相あるいはこれらの組合わせの変化をリアルタイムで測定し、当該アクテイブタグ1が位置する方向と当該アクテイブタグと携帯端末との距離を検知することによって、歩行者404が横断歩道403の範囲を逸脱せずに安全に歩行することができる。」とされている。
【0012】
しかしながら、アクテイブタグが位置する方向および当該アクテイブタグと携帯端末の距離を精度良く検知する方法について、具体的に言及されていない問題点がある。
【発明の開示】
【発明が解決しようとする課題】
【0013】
この発明は、無線マーカと移動端末の各々の側で、移動端末の位置を高精度で特定し、前記特定した位置情報を活用し、前記移動端末を搭載しあるいは携帯する移動体の自律的な移動を支援し、遠隔制御し、あるいは案内誘導を行なう、自律移動支援システムを安価に実現するためのものである。
【課題を解決するための手段】
【0014】
この発明に係わる自律移動支援システムでは、前記無線信号を時分割で発信し受信するための、無線マーカと、移動端末とを含み、前記移動端末の移動ルートに沿って、複数の無線マーカを間隔をおいて設置して、アドホックネットワークを構成し、
前記複数の無線マーカの内の、特定の無線マーカをノードとし、前記アドホックネットワークを、別に設けた通信回線を経由して、センタの制御サーバに接続し、前記移動端末と無線マーカが、少なくとも、無線信号を発信し受信するための発信手段と、受信手段と、前記発信手段と受信手段とを制御するための制御手段とを含み、
前記制御手段が、少なくとも、信号生成手段と、信号再生手段と、同期検出手段と、同期発振手段と、位相測定手段と位置算出手段とを有し、
【0015】
前記無線マーカが特定した位置情報を、前記ノードとなる無線マーカを経由して、前記センタの制御サーバに向けて転送し、前記制御サーバによって、前記転送された位置情報を処理し、前記移動体の自律移動を修正し、制御し、あるいは誘導するための指令情報を、前記移動端末に向けて転送し、
前記移動端末が、少なくとも、自局において特定した位置情報を基に移動体の自律移動を制御しあるいは誘導し、かつ前記制御サーバから転送された指令情報を基に移動体の自律移動を修正し、制御し、あるいは誘導することができる。
【発明の効果】
【0016】
本発明の自律移動支援システムでは、無線マーカと移動端末の各々の側で、移動端末の位置を高精度で特定し、前記特定した位置情報を活用し、前記移動端末を搭載しあるいは携帯する移動体の自律的な移動を支援し、遠隔制御し、あるいは案内誘導を行なう、自律移動支援システムを安価に実現することができる。
【発明を実施するための最良の形態】
【0017】
この発明に係わる自律移動支援システムは、図1〜図3および請求項1に本発明の第1の実施の形態を示すように、超音波信号あるいは高周波信号あるいは光信号である無線信号を用いた移動支援システムにおいて、
前記無線信号を時分割で発信し受信するための、無線マーカ1と、移動端末3とを含み、前記移動端末3の移動ルートに沿って、複数の無線マーカ1を間隔をおいて設置して、アドホックネットワーク7を構成し、前記複数の無線マーカ1の内の、特定の無線マーカ1をノードとし、前記アドホックネットワーク7を、別に設けた通信回線を経由して、センタの制御サーバ8に接続し、
【0018】
前記移動端末3と無線マーカ1が、少なくとも、無線信号を発信し受信するための発信手段12と、受信手段13と、前記発信手段12と受信手段13とを制御するための制御手段11とを含み、前記制御手段11が、少なくとも、信号生成手段35、37と、信号再生手段34、40と、同期検出手段39と、同期発振手段36と、位相測定手段33と、位置算出手段32とを有し、
前記複数の無線マーカが、少なくとも、報知信号を含む無線信号を、任意のタイミングでバースト信号として間欠発信し、
【0019】
前記移動端末3が、少なくとも、前記複数の無線マーカ1の内、比較的に大きな受信入力値(RSSI)で受信した無線マーカ1を指定して、位置特定要求信号を含む無線信号を任意のタイミングで発信し、
前記指定された無線マーカ1が、少なくとも、前記位置特定要求信号に含まれる起点信号と、高精度でかつ短時間に同期を確立し、同期を保持した第1の距離測定信号と、別途生成した方向測定信号とを含む無線信号を、複数の指向性アンテナ又は複数の指向性送受波器を周期的に切替えながら、時分割で発信し、
【0020】
前記移動端末3が、少なくとも、
前記無線マーカ1から受信した無線信号から、前記第1の距離測定信号と、方向測定信号とを再生し、前記自局で生成した起点信号をクロック信号として用い、前記再生した第1の距離測定信号の位相を測定して無線マーカからの距離を算出し、前記複数のアンテナ又は複数の送受波器に対応した方向測定信号の位相差を測定して無線マーカが位置する方向を算出して、前記無線マーカとの相対位置を高精度で特定するとともに、
前記再生した第1の距離測定信号と、高精度でかつ短時間に同期を確立し、同期を保持した第2の距離測定信号と、別途生成した方向測定信号とを含む無線信号を、前記移動端末に向けて時分割で発信し、
【0021】
前記無線マーカ1が、少なくとも、前記移動端末3から発信された無線信号を前記複数の指向性アンテナ又は複数の指向性送受波器2a〜2dを周期的に切替えながら受信した無線信号に含まれる第2の距離測定信号と、方向測定信号とを再生し、前記第1の距離測定信号をクロック信号として用い、前記再生した第2の距離測定信号の位相を測定して移動端末からの距離を算出し、前記複数のアンテナ又は複数の送受波器に対応した方向測定信号の位相差を測定して移動端末が位置する方向を算出し、前記移動端末との相対位置を高精度で特定するとともに、
【0022】
前記特定した位置情報を、前記ノードとなる無線マーカを経由して、前記センタの制御サーバ8に向けて転送し、前記制御サーバ8によって、前記転送された位置情報を処理し、前記移動体の自律移動を修正し、制御し、あるいは誘導するための指令情報を、前記移動端末に向けて転送し、
前記移動端末3が、少なくとも、自局において特定した位置情報を基に移動体の自律移動を制御しあるいは誘導し、かつ前記制御サーバ8から転送された指令情報を基に移動体の自律移動を修正し、制御し、あるいは誘導することができる。
【0023】
また、図1〜図3および請求項2に本発明の第2の実施の形態を示すように、 超音波信号あるいは高周波信号あるいは光信号である無線信号を用いた移動支援システムにおいて、
前記無線信号を時分割で発信し受信するための、無線マーカと、移動端末とを含み、前記移動端末の移動ルートに沿って、複数の無線マーカを間隔をおいて設置して、アドホックネットワークを構成し、前記複数の無線マーカの内の、特定の無線マーカをノードとし、前記アドホックネットワークを、別に設けた通信回線を経由して、センタの制御サーバに接続し、
【0024】
前記移動端末と無線マーカが、少なくとも、無線信号を発信し受信するための発信手段と、受信手段と、前記発信手段と受信手段とを制御するための制御手段とを含み、前記制御手段が、少なくとも、信号生成手段と、信号再生手段と、同期検出手段と、同期発振手段と、位相測定手段と位置算出手段とを有し、
前記移動端末が、少なくとも、位置特定要求信号の発信を要求するための発信要求信号を含む無線信号を、任意のタイミングでバースト信号として間欠発信し、
【0025】
前記複数の無線マーカの内、規定値以上の受信入力値で受信した無線マーカが、少なくとも、前記受信入力値を、前記特定の無線マーカを経由して、前記制御サーバに向けて転送し、
前記制御サーバが、少なくとも、前記転送された受信入力値を基に、無線マーカを指定して、前記位置特定要求信号の発信を指令し、
前記指定された無線マーカが、少なくとも、前記発信要求信号に同期して、前記位置特定要求信号を含む無線信号を、前記移動端末に向けて発信し、
【0026】
前記移動端末が、少なくとも、前記位置特定要求信号に含まれる起点信号と、高精度でかつ短時間に同期を確立し、同期を保持した第1の距離測定信号と、別途生成した方向測定信号とを含む無線信号を、前記無線マーカに向けて時分割で発信し、
前記無線マーカが、少なくとも、複数の指向性アンテナ又は複数の指向性送受波器を周期的に切替えながら、受信した無線信号から、前記第1の距離測定信号と、方向測定信号とを再生し、前記自局で生成した起点信号をクロック信号として用い、前記再生した第1の距離測定信号の位相を測定して移動端末からの距離を算出し、前記複数のアンテナ又は複数の送受波器に対応した方向測定信号の位相差を測定して移動端末が位置する方向を算出して、前記移動端末との相対位置を高精度で特定するとともに、
【0027】
前記再生した第1の距離測定信号と、高精度でかつ短時間に同期を確立し、同期を保持した第2の距離測定信号と、別途生成した方向測定信号とを含む無線信号を、前記複数の指向性アンテナ又は複数の指向性送受波器を周期的に切替えながら、前記移動端末に向けて時分割で発信し、
前記移動端末が、少なくとも、前記無線マーカから、発信された無線信号に含まれる第2の距離測定信号と、方向測定信号とを再生し、前記第1の距離測定信号をクロック信号として用い、前記再生した第2の距離測定信号の位相を測定して移動端末からの距離を算出し、前記複数のアンテナ又は複数の送受波器に対応した方向測定信号の位相差を測定して移動端末が位置する方向を算出して、前記無線マーカとの相対位置を高精度で特定するとともに、
【0028】
前記指定された無線マーカが特定した位置情報を、前記ノードとなる無線マーカを経由して、前記センタの制御サーバに向けて転送し、前記制御サーバによって、前記転送された位置情報を処理し、前記移動体の自律移動を修正し、制御し、あるいは誘導するための指令情報を、前記移動端末に向けて転送し、
前記移動端末が、少なくとも、自局において特定した位置情報を基に移動体の自律移動を制御しあるいは誘導し、かつ前記制御サーバから転送された指令情報を基に移動体の自律移動を修正し、制御し、あるいは誘導することができる。
【0029】
また、請求項3に示すように、前記起点信号、距離測定信号、もしくはこれらの両方が、単一もしくは同期しあるいは直交する複数の、搬送波信号、副搬送波信号、変調信号、スペクトル拡散符号、もしくはこれらの組合せであるものとする。
また、請求項4に示すように、前記信号再生手段において、前記再生する起点信号もしくは距離測定信号が、無線信号の搬送波信号あるいは副搬送波信号である場合には、群遅延歪みの少ない帯域通過フイルタを通し、あるいは無線信号を変調した変調信号である場合には、遅延誤差の少ないアナログ復調器もしくは高い周波数のクロック信号を用いる遅延誤差の少ないデジタル復調器によって復調した後に、前記帯域通過フイルタを通して再生することができる。
【0030】
また、請求項5に示すように、前記同期発振手段が基準発振器によって駆動されるセットあるいはリセット付きのカウンタあるいは数値制御発振器によって構成され、復調されもしくは再生された前記起点信号もしくは位置特定信号の立上がり点、立下がり点、もしくはゼロ交差点のタイミングを、少なくとも16MHz以上の周波数のクロック信号を用いて検出し、前記検出したタイミングで、前記カウンタあるいは数値制御発振器をセットしもしくはリセットすることによって、前記起点信号と短時間で同期を確立し、同期を保持できる。
【0031】
また、請求項6に示すように、前記無線マーカに接続される複数のアンテナ又は送受波器を、前記方向測定信号の1波長以下の間隔で、指向性を下方向または斜め下方向に向けて設置し、前記移動端末に接続される任意の数のアンテナ又は送受波器を、指向性を上方向または斜め上方向に向けて設置するものとする。
また、請求項7に示すように、前記方向測定信号の1波長以上の比較的に広い間隔で移動体に設置した複数のアンテナを、前記移動端末に接続し、周期的に切替えながら位置の特定を行い、アンテナ毎に算出した距離が比較的に短いものを選択し、あるいはアンテナ毎に特定した位置の間隔が、前記移動体に設置したアンテナの間隔に比較的に近く特定したものを選択し、あるいは平均するものとする。
また、請求項8に示すように、前記移動端末が、危険区域内を移動する、作業ロボットあるいは監視ロボットに設置されるものとする。
【0032】
(実施の形態1)
図1は本発明の第1の形態による自律移動支援システムの構成図である。図1において、1a〜1cは無線マーカ、2a〜2d、2oはアンテナ、3は移動端末、4は無線の伝搬経路の距離、5は移動端末3が位置する方向、6はノード、7はアドホックネットワーク、8はセンタの制御サーバ(記載せず)、9aは天井、9bは床面である。
前記複数の無線マーカ1a〜1cを、間隔をおいて天井面に設置して、アドホックネットワーク7を構成し、前記アドホックネットワーク7を、特定の無線マーカ1bをノード6に接続し、別に設けた通信回線(記載せず)を経由して、センタの制御サーバ8(記載せず)に接続する。
【0033】
前記移動端末3と無線マーカ1a〜1cが、少なくとも、無線信号を発信し受信するための発信手段と、受信手段と、前記発信手段と受信手段とを制御するための制御手段とを含み、前記制御手段が、少なくとも、信号生成手段と、信号再生手段と、同期検出手段と、同期発振手段と、位相測定手段と位置算出手段とを有し、前記移動端末3と無線マーカ1a〜1cの各々の側で、移動端末3の位置を高精度で特定することができるものとする。
【0034】
前記無線マーカ1a〜1cが特定した位置情報を、前記ノード6となる無線マーカ1bを経由して、前記センタの制御サーバ8に向けて転送し、前記制御サーバ8によって、前記転送された位置情報を処理し、前記移動体3の自律移動を修正し、制御し、あるいは誘導するための指令情報を、逆方向に、前記ノード6となる無線マーカ1bを経由し、アドホックネットワーク7を経由して、前記移動端末3に向けて転送する。
前記移動端末3が、少なくとも、自局において特定した位置情報を基に、前記移動体の自律移動を制御しあるいは誘導し、かつ前記制御サーバ8から転送された指令情報を基に移動体の自律移動を修正し、制御し、あるいは誘導することができる。
【0035】
ここで、前記移動端末3の位置は、伝搬経路の距離4と、移動端末3が位置する方向とを算出し、瞬時にかつ高精度で、特定することができる。
また、前記無線マーカ1a〜1cに接続される複数のアンテナを、指向性を下方向または斜め下方向に向けて設置し、前記移動端末3に接続される任意の数のアンテナを、指向性を上方向または斜め上方向に向けて設置することで、マルチパスによって生じる位置の特定誤差を軽減することができる。
【0036】
図2は本発明の第1の実施の形態による無線マーカおよび移動端末の構成図であり、1は無線マーカ、3は移動端末、11a、11bは制御手段、12a、12bは発信手段、13a、13bは受信手段、14a、14bはアンテナ切替手段、2a〜2d、2oは無線マーカ1のアンテナ、2eは移動端末3のアンテナ、21は無線の伝搬路である。
【0037】
移動端末3の位置を特定するために、前記無線信号を、20ミリ秒以下のバースト信号として、時分割で発信しかつ受信するための、無線マーカ1と、移動端末3とから構成され、
前記無線マーカ1が、制御手段11aと、発信手段12aと、受信手段13aと、アンテナ切替手段14aと、アンテナ2a〜2d、2oとから構成され、前記移動端末3が、制御手段11bと、発信手段12bと、受信手段13bと、アンテナ切替手段14bと、アンテナ2ebとから構成され、
【0038】
前記発信手段12bから、少なくとも、制御手段11bで生成した起点信号を含む無線信号をアンテナ2eを介して発信し、前記アンテナ2a〜2dのいずれかを介して受信手段13aで受信し、前記制御手段11aにおいて、少なくとも、前記起点信号を再生し、前記再生した起点信号と高精度で同期した第1の距離測定信号と、方向測定信号と生成し、前記生成した第1の距離測定信号と方向測定信号を含む無線信号を、複数のアンテナ2a〜2dを周期的に切替ながら発信手段12aから時分割で発信し、
【0039】
前記無線信号を前記受信手段13bで受信し、前記制御手段11bにおいて、少なくとも、前記第1の距離測定信号と方向測定信号とを再生し、自局で生成した起点信号をクロック信号として用い、前記再生した第1の距離測定信号の位相を測定して無線マーカ1と移動端末3との間の距離を算出し、前記複数のアンテナ2a〜2dに対応して方向測定信号の位相差を測定して無線マーカ3が位置する方向を算出し、前記移動端末3の位置を特定するとともに、前記第1の距離測定信号と高精度で同期した第2の距離測定信号を生成し、
【0040】
前記発信手段12bから、少なくとも、前記制御手段11aにおいて生成した前記第2の距離測定信号と、別に生成した方向測定信号を含む無線信号をアンテナ2eを介して発信し、前記無線信号を複数のアンテナ2a〜2dを周期的に切替えながら、受信手段13aで受信し、前記制御手段11aにおいて、少なくとも、前記第2の距離測定信号を再生し、自局で生成した第1の距離測定信号をクロック信号として用い、前記再生した第2の距離測定信号の位相を測定して無線マーカ1と移動端末3との間の距離を算出し、前記複数のアンテナ2a〜2dに対応して方向測定信号の位相差を測定して無線マーカ3が位置する方向を算出し、前記移動端末3の位置を特定する。
【0041】
なお、前記無線マーカ1と移動端末3との間で位置情報を交換し、両者の平均値を求めることで、位置の算出精度の改善が可能となる。
また、前記に引き続き、前記無線マーカ1と移動端末3との間で相互通信を続けることによって、複数回の距離の算出を行い、これらの平均値を求めることでも、位置の算出精度の改善が可能となる。
また、前記起点信号、距離測定信号、方向測定信号、あるいはこれらの組み合わせが、法令により許容される周波数の範囲内であり、単一もしくは同期しあるいは直交する複数の、搬送波信号、副搬送波信号、変調信号、スペクトル拡散符号、もしくはこれらの任意の組み合わせである。
【0042】
図2は本発明の第1の実施の形態による制御手段の構成図であり、11a、11bは制御手段、31は基準発振器、32は位置算出手段、33は位相測定手段、34は測定信号再生手段、35は起点信号生成手段、36は同期発振器、37は測定信号生成手段、38は位相同期発振器、39は同期検出手段、40は起点信号再生手段、41、42は接続端子である。
【0043】
前記起点信号生成手段35によって、前記基準発振器41に同期し、少なくとも、システム同期信号と、マックレイヤと、法規により許容される周波数範囲の単一もしくは複数の周波数の起点信号とが生成され、接続端子41を介して図1に示す発信手段12a、12bに供給され、その内の起点信号は、位相測定のためのクロック信号として、別途、前記位相測定手段43にも供給される。
【0044】
一方、図1に示す受信手段14a、14bによって受信される無線信号は、直接あるいは中間周波信号に変換され、接続端子42を介して前記起点信号再生手段34もしくは測定信号再生手段40に供され、前記起点信号、距離測定信号、方向測定信号、もしくはこれらの組み合わせが、無線信号の搬送波信号あるいは副搬送波信号である場合には、群遅延歪みの少ない帯域通過フイルタ(例えば、ガウシャンフイルタ)を通し、あるいは無線信号の搬送波信号あるいは副搬送波信号を変調した変調信号である場合には、遅延誤差の少ないアナログ復調器もしくは高い周波数のクロック信号を用いた遅延誤差の少ないデジタル復調器によって復調した後に、前記帯域通過フイルタを通して再生することによって、前記距離の算出誤差を軽減することができる。
【0045】
また、前記測定信号再生手段34によって再生された測定信号は位相測定手段33に供給され、前記自局内で生成した起点信号もしくは同期発振手段36の出力信号の周波数の整数倍もしくは整数分の1の周波数をクロック信号として用い、積和演算器によって、前記測定信号の位相を高精度でリアルタイムで測定し、測定結果を距離算出手段32に出力する。
また、前記距離算出手段32は、例えば、基準発振器31からの供給されるクロック信号によって動作する標準的なマイクロプロセッサであり、前記無線マーカ1と移動端末3との間の距離を高精度で算出する。
【0046】
なお、前記同期発振手段36が基準発振器31(例えば、周波数安定度が±0.5ppm以内のもの)によって駆動されるカウンタあるいは数値制御発振器によって構成され、前記受信手段によって受信され、起点信号再生手段によって復調されもしくは再生された起点信号あるいは測定信号の立上がり点、立下がり点、もしくはゼロ交差点のタイミングを、同期検出手段39によって少なくとも16MHz以上の周波数のクロック信号を用いて検出し、前記検出したタイミングで、前記カウンタあるいは数値制御発振器をセットしもしくはリセットすることによって、前記起点信号と短時間で同期を確立し、かつ前記起点信号あるいは測定信号が消滅した後も、比較的に長時間、同期を保持できる。
【0047】
また、上記では、移動端末3側から、起点信号を含む無線信号を発信する場合について説明したが、逆に、無線マーカ側から、起点信号を含む無線信号を発信する場場合でも同様な効果が得られる。
【0048】
図4は本発明の第1の実施の形態によるアンテナの外観図であり、1は無線マーカ、2はアンテナレドーム、2a〜2dは複数のアンテナ、2oは単一のアンテナである。
前記複数のアンテナ2ba〜2bdは移動端末3の2次元もしくは3次元の位置を特定するために用いられ、通常、高誘電率円偏波セラミックアンテナが用いられ、下方向もしくは斜め下方向に向けて設置される。
一方、アンテナ2oはアドホックネットワークを形成するために用いられ、通常無指向性アンテナが用いられる。前記無線マーカの設置間隔によっては、前記複数のアンテナ2ba〜2bdによって代替することも可能である。
前記アンテナレドーム2は、無線マーカ1とアンテナ2a〜2d、2oとを一体として収納することで、小型化が可能となる。
【0049】
なお、前記複数のアンテナ2ba〜2bdの指向性ビーム幅が広い場合には、前記無指向性アンテナ2oを兼ねることができる。
また、前記無指向性アンテナ2oの取り付け位置は、図4に示した位置以外に、任意の場所に設けることができる。
また、移動端末のアンテナに同様な構造の単一もしくは複数のアンテナを内蔵することで、マルチパスの影響を軽減できる。
また、前記方向測定信号の1波長以上の比較的に広い間隔で、移動体に設置した複数のアンテナを、前記移動端末に接続し、周期的に切替えながら位置の特定を行い、アンテナ毎に算出した距離が比較的に短いものを選択し、あるいはアンテナ毎に特定した位置の間隔が、前記移動体に設置したアンテナに間隔に比較的に近く特定したものを選択し、あるいは平均することで、マルチパスの影響を軽減することができる。
【0050】
図5は本発明のの自律移動支援システムのタイムチャートであり、71aは移動端末3から発信される起点信号、71bは無線マーカ1によって再生される起点信号、72は前記移動端末3から無線マーカ1に向けて起点信号71aが伝搬する伝搬経路、73aは前記無線マーカによって再生された起点信号71bに同期して生成される第1の距離測定信号、73bは前記移動端末3によって再生された第1の距離測定信号、74は前記無線マーカ1から移動端末3に向けて第1の距離測定信号73aが伝搬する伝搬経路、75aは前記移動端末3で再生される第1の第1の距離測定信号73bに同期して生成された第2の距離測定信号、75bは無線マーカ1で再生された第2の距離測定信号であり、
【0051】
76は前記移動端末3から無線マーカ1に向けて第2の距離測定信号75aが伝搬する伝搬経路、77aは移動端末3から発信される起点信号71aと前記無線マーカ1によって再生される第1の距離測定信号73bとの位相差、77bは無線マーカ1で生成される第1の距離測定信号73aと無線マーカ1で再生される第2の距離測定信号75bとの位相差、78a、78bは時分割の間隔、81a〜81cは前記移動端末3の時間軸、82a〜82cは前記無線マーカ1の時間軸である。
【0052】
前記移動端末3から発信される前記起点信号71aをASin(2πf1t)とすると、前記起点信号71aが、距離L(m)の伝搬経路72を伝搬し、前記無線マーカ1によって受信され、起点信号71bとして再生されると、BSin{2πf1t+(2πLf1/C)}に位相が変化する。
前記再生された起点信号71bと、同期確立誤差がゼロで同期した第1の距離測定信号73aを生成すると、生成された第1の距離測定信号73aは、同じくBSin{2πf1t+(2πLf1/C)}で表される。
【0053】
前記時分割の間隔78a後に、前記生成された第1の距離測定信号73aが、前記無線マーカ1から発信され、再び、距離L(m)の伝搬経路74を伝搬し、前記移動端末3で再生される第1の距離測定信号73bは、CSin{2πf1t+(4πLf1/C)}で表わされる。ここで、Cは光の速度とする。
そこで、前記移動端末3で生成された起点信号71aと同期しあるいは直交し、周波数が前記起点信号の整数倍のクロック信号を用い、前記再生された第1の距離測定信号73bの位相を測定すると、前記移動端末3で生成された起点信号71aと前記移動端末3で再生された第1の距離測定信号73bとの位相差77aが測定され、ΔΦ={4πLf1/C}となることから、L={CΔΦ/4πf1}から、距離L(m)が前記無線マーカの側で算出できる。
【0054】
同様にして、前記移動端末3で前記第1の距離測定信号73bに同期して生成された第2の距離測定信号75aと前記無線マーカ1で生成された際1の距離測定信号73aとの位相差77bが測定され、ΔΦ={4πLf1/C}となることから、L={CΔΦ/4πf1}から、距離L(m)が前記無線マーカ1側で算出できる。
更に、同様なシーケンスを繰返すことによって、前記移動端末3側と前記無線マーカ1側とで、複数回距離L(m)が算出できることから、それぞれの側で、平均値を求めることで、距離の算出精度を高めることができる。
なお、前記算出精度の改善は、主に、前記同期検出手段49における同期確立誤差がランダムに変化することに由来する。
【0055】
図6は本発明の自律移動支援システムのシーケンス図である。図6において、
前記複数の無線マーカ1a〜1cが、少なくとも、報知信号を含む無線信号を、任意のタイミングでバースト信号として間欠発信しており、
移動端末が、少なくとも、前記複数の無線マーカの内、比較的に大きな受信入力値(RSSI)で受信した無線マーカを指定して、位置特定要求信号を含む無線信号を任意のタイミング(非同期)でバースト信号として発信し、
【0056】
前記指定された無線マーカが、少なくとも、受信した起点信号と同期した第1の距離測定信号を含む無線信号を、前記移動端末に向けて時分割でバースト信号として遅滞無く発信し、
前記移動端末が、自局の位置を算出するとともに、少なくとも、受信した第1の距離測定信号と同期した第2の距離測定信号を含む無線信号を、前記無線マーカに向けて時分割でバースト信号として遅滞無く発信し、
前記無線マーカが、移動端末の位置を算出するとともに、制御サーバに向けて位置情報として転送する。
【0057】
図7本発明の自律移動支援システムの他のシーケンス図である。図7において、
前記移動端末が、少なくとも、位置特定要求信号の発信を要求するための発信要求信号を含む無線信号を、複数の無線マーカ1a〜1cに向けて、任意のタイミング(非同期)でバースト信号として間欠発信し、
前記無線マーカ1a〜1cが、少なくとも、前記発信要求信号を含む無線信号を受信し、受信入力値(RSSI)が規定値を超える無線マーカから、センタの制御サーバに向けて、前記受信入力値を含む位置登録要求信号を転送し、
【0058】
前記制御サーバが、少なくとも、無線マーカ1a〜1cから転送された位置登録信号に含まれる受信入力値を比較して、比較的に大きな受信入力値で受信した無線マーカを指定して、位置登録受付信号を転送し、
前記指定された無線マーカが、少なくとも、前記移動端末に向けて、位置特定要求信号を含む無線信号を任意のタイミングでバースト信号として発信し、
【0059】
前記移動端末が、少なくとも、受信した起点信号と同期した第1の距離測定信号を含む無線信号を、前記無線マーカに向けて時分割でバースト信号として遅滞無く発信し、
前記無線マーカが、前記移動端末の位置を算出して、制御サーバに位置情報として転送するとともに、少なくとも、受信した第1の距離測定信号と同期した第2の距離測定信号を含む無線信号を、前記移動端末に向けて、時分割でバースト信号として遅滞無く発信し、
前記移動端末が、自局の位置を算出する。
【0060】
以上の説明では、前記移動端末あるいは無線マーカから発信される位置特定信号として、単一の周波数の位置特定信号を再発信する場合について説明したが、単一の周波数の位置特定信号を用いる場合、ΔΦの変化を0<ΔΦ<2πに制限する必要があることから、再生された起点信号71bに同期しあるいは直交し少なくとも周波数が異なる複数の位置特定信号を用いると、複数のレンジで位置を特定することが可能となり、特定したい位置にレンジを合わせることで、精密な位置の特定が可能となるメリットが得られる。
【0061】
また、無線信号として、超音波信号、高周波信号、もしくは光信号を用いることができる。なお、超音波信号もしくは光信号の場合には、アンテナの代わりに、送受波器を用いるものとする。
また、超広帯域通信方式(ウルトラワイドバンド)を用いることで、高い周波数の変調信号あるいは高いチップレートの拡散符号を採用できるので、同期しあるいは直交する複数の変調信号あるいは拡散符号を割り当てることが可能となり、複数の測定レンジを設定できることから、30m以内の近距離での位置特定精度を向上させることができる。
【産業上の利用可能性】
【0062】
本発明によれば、前記移動端末を移動可能な移動体に装着しあるいは携帯させ、無線マーカをネットワークで結ぶことで、移動体の正確な位置を移動体側とネットワーク側で同時にリアルタイムで検知できることから、同時に特定した位置情報をもとに、歩行者あるいはロボットなどの自律移動の支援あるいは制御と、センターからの遠隔制御と監視、あるいは案内と誘導などが可能となる。
また、前記移動端末を、原子炉周辺あるいは高圧変電所内などの危険区域内を移動する、作業ロボットあるいは監視ロボットなどに設置し、制御サーバを、安全な監視室に設置することで、人体の安全を確保できる。
【0063】
また、移動端末をRFタグとして流通貨物、あるいは貨物移動用のフオークリフトなどに添付し、複数の無線マーカを流通貨物の移動範囲内に離散的に設置し、前記RFタグからの無線信号を前記無線マーカによって受信することによって、貨物の流通の経路あるいは収納場所などを高精度で特定することによって、貨物の流通の合理化が可能となる。
なお、本発明の位置特定技術は基盤技術であり、上記以外に多分野での利用が期待できる。
【図面の簡単な説明】
【0064】
【図1】本発明の第1の実施の形態による自律移動支援システムの構成図
【図2】本発明の第1の実施の形態による無線マーカおよび移動端末の構成図
【図3】本発明の第1の実施の形態による制御手段の構成図
【図4】本発明の無線マーカのアンテナの外観図
【図5】本発明の自律移動支援システムのタイミングチャート
【図6】本発明の自律移動支援システムの制御シーケンス図
【図7】本発明の自律移動支援システムの他の制御シーケンス図
【図8】従来の実施例を示す構成図
【符号の説明】
【0065】
1a〜1c 無線マーカ
2a〜2d、1o アンテナ
3 移動体
4 無線信号の伝搬路の距離
5 移動体が位置する方向
6 ノード
7 アドホックネットワーク
8(記載せず) 制御サーバ
9a 天井表面
9b 床面
【0066】
101 歩行者
102A、102B ICタグ
103 携帯端末
111A、111B アンテナ
112 ICタグ読取装置
113 制御疎プチ
115 発信装置
【特許請求の範囲】
【請求項1】
超音波信号あるいは高周波信号あるいは光信号である無線信号を用いた移動支援システムにおいて、
前記無線信号を時分割で発信し受信するための、無線マーカと、移動端末とを含み、
前記移動端末の移動ルートに沿って、複数の無線マーカを間隔をおいて設置して、アドホックネットワークを構成し、
前記複数の無線マーカの内の、特定の無線マーカをノードとし、前記アドホックネットワークを、別に設けた通信回線を経由して、センタの制御サーバに接続し、
前記移動端末と無線マーカが、少なくとも、無線信号を発信し受信するための発信手段および受信手段と、前記発信手段と受信手段とを制御するための制御手段とを含み、
前記制御手段が、少なくとも、信号生成手段と、信号再生手段と、同期検出手段と、同期発振手段と、位相測定手段と、位置算出手段とを有し、
前記複数の無線マーカが、少なくとも、
報知信号を含む無線信号を、任意のタイミングでバースト信号として間欠発信し、
前記移動端末が、少なくとも、
前記複数の無線マーカの内、比較的に大きな受信入力値で受信した無線マーカを指定して、位置特定要求信号を含む無線信号を任意のタイミングで発信し、
前記指定された無線マーカが、少なくとも、
前記位置特定要求信号に含まれる起点信号と、高精度でかつ短時間に同期を確立し、同期を保持した第1の距離測定信号と、別途生成した方向測定信号とを含む無線信号を、複数の指向性アンテナ又は複数の指向性送受波器を周期的に切替えながら、時分割で発信し、
前記移動端末が、少なくとも、
前記無線マーカから受信した無線信号から、前記第1の距離測定信号と、方向測定信号とを再生し、前記自局で生成した起点信号をクロック信号として用い、前記再生した第1の距離測定信号の位相を測定して無線マーカからの距離を算出し、前記複数のアンテナ又は複数の送受波器に対応した方向測定信号の位相差を測定して無線マーカが位置する方向を算出し、前記無線マーカとの相対位置を高精度で特定するとともに、
前記再生した第1の距離測定信号と高精度でかつ短時間に同期を確立して、同期を保持した第2の距離測定信号と、別途生成した方向測定信号とを含む無線信号を、前記移動端末に向けて時分割で発信し、
前記無線マーカが、少なくとも、
前記移動端末から発信された無線信号を前記複数の指向性アンテナ又は複数の指向性送受波器を周期的に切替えながら受信した無線信号に含まれる第2の距離測定信号と、方向測定信号とを再生し、前記第1の距離測定信号をクロック信号として用い、前記再生した第2の距離測定信号の位相を測定して移動端末からの距離を算出し、前記複数のアンテナ又は複数の送受波器に対応した方向測定信号の位相差を測定して移動端末が位置する方向を算出して、前記移動端末との相対位置を高精度で特定するとともに、
前記特定した位置情報を、前記ノードとなる無線マーカを経由して、前記センタの制御サーバに向けて転送し、前記制御サーバによって、前記転送された位置情報を処理し、前記移動体の自律移動を修正し、制御し、あるいは誘導するための指令情報を、前記移動端末に向けて転送し、
前記移動端末が、少なくとも、
自局において特定した位置情報を基に移動体の自律移動を制御しあるいは誘導し、かつ前記制御サーバから転送された指令情報を基に移動体の自律移動を修正し、制御し、あるいは誘導する
ことを特徴とする自律移動支援システムとその制御方法。
【請求項2】
超音波信号あるいは高周波信号あるいは光信号である無線信号を用いた移動支援システムにおいて、
前記無線信号を時分割で発信し受信するための、無線マーカと、移動端末とを含み、
前記移動端末の移動ルートに沿って、複数の無線マーカを間隔をおいて設置して、アドホックネットワークを構成し、
前記複数の無線マーカの内の、特定の無線マーカをノードとし、前記アドホックネットワークを、別に設けた通信回線を経由して、センタの制御サーバに接続し、
前記移動端末と無線マーカが、少なくとも、無線信号を発信し受信するための発信手段と、受信手段と、前記発信手段と受信手段とを制御するための制御手段とを含み、
前記制御手段が、少なくとも、信号生成手段と、信号再生手段と、同期検出手段と、同期発振手段と、位相測定手段と位置算出手段とを有し、
前記移動端末が、少なくとも、
位置特定要求信号の発信を要求するための発信要求信号を含む無線信号を、任意のタイミングでバースト信号として間欠発信し、
前記複数の無線マーカの内、規定値以上の受信入力値で受信した無線マーカが、少なくとも、
前記受信入力値を、前記特定の無線マーカを経由して、前記制御サーバに向けて転送し、
前記制御サーバが、少なくとも、
前記転送された受信入力値を基に、無線マーカを指定して、前記位置特定要求信号の発信を指令し、
前記指定された無線マーカが、少なくとも、
前記発信要求信号に同期して、前記位置特定要求信号を含む無線信号を、前記移動端末に向けて発信し、
前記移動端末が、少なくとも、
前記位置特定要求信号に含まれる起点信号と、高精度でかつ短時間に同期を確立し、同期を保持した第1の距離測定信号と、別途生成した方向測定信号とを含む無線信号を、前記無線マーカに向けて時分割で発信し、
前記無線マーカが、少なくとも、
複数の指向性アンテナ又は複数の指向性送受波器を周期的に切替えながら、受信した無線信号から、前記第1の距離測定信号と、方向測定信号とを再生し、前記自局で生成した起点信号をクロック信号として用い、前記再生した第1の距離測定信号の位相を測定して移動端末からの距離を算出し、前記複数のアンテナ又は複数の送受波器に対応した方向測定信号の位相差を測定して移動端末が位置する方向を算出して、前記移動端末との相対位置を高精度で特定するとともに、
前記再生した第1の距離測定信号と高精度でかつ短時間に同期を確立し、前記第1の距離測定信号との同期を保持した第2の距離測定信号と、別途生成した方向測定信号とを含む無線信号を、前記複数の指向性アンテナ又は複数の指向性送受波器を周期的に切替えながら、前記移動端末に向けて時分割で発信し、
前記移動端末が、少なくとも、
前記無線マーカから、発信された無線信号に含まれる第2の距離測定信号と、方向測定信号とを再生し、前記第1の距離測定信号をクロック信号として用い、前記再生した第2の距離測定信号の位相を測定して移動端末からの距離を算出し、前記複数のアンテナ又は複数の送受波器に対応した方向測定信号の位相差を測定して移動端末が位置する方向を算出して、前記無線マーカとの相対位置を高精度で特定するとともに、
前記指定された無線マーカが特定した位置情報を、前記ノードとなる無線マーカを経由して、前記センタの制御サーバに向けて転送し、前記制御サーバによって、前記転送された位置情報を処理し、前記移動体の自律移動を修正し、制御し、あるいは誘導するための指令情報を、前記移動端末に向けて転送し、
前記移動端末が、少なくとも、
自局において特定した位置情報を基に移動体の自律移動を制御しあるいは誘導し、かつ前記制御サーバから転送された指令情報を基に移動体の自律移動を修正し、制御し、あるいは誘導する
ことを特徴とする自律移動支援システムとその制御方法。
【請求項3】
前記起点信号、距離測定信号、方向測定信号、もしくはこれらの組み合わせが、単一もしくは同期しあるいは直交する複数の、搬送波信号、副搬送波信号、変調信号、スペクトル拡散符号、もしくはこれらの組合せであることを特徴とする請求項第1項あるいは第2項に記載の自律移動支援システムとその制御方法。
【請求項4】
前記信号再生手段において、前記再生する起点信号もしくは距離測定信号が、無線信号の搬送波信号あるいは副搬送波信号である場合には、群遅延歪みの少ない帯域通過フイルタを通し、あるいは無線信号を変調した変調信号である場合には、遅延誤差の少ないアナログ復調器もしくは高い周波数のクロック信号を用いる遅延誤差の少ないデジタル復調器によって復調した後に、前記帯域通過フイルタを通して再生することを特徴とする請求項第1項あるいは第2項に記載の自律移動支援システムとその制御方法。
【請求項5】
前記同期発振手段が基準発振器によって駆動されるセットあるいはリセット付きのカウンタあるいは数値制御発振器によって構成され、復調されもしくは再生された前記起点信号もしくは位置特定信号の立上がり点、立下がり点、もしくはゼロ交差点のタイミングを、少なくとも16MHz以上の周波数のクロック信号を用いて検出し、前記検出したタイミングで、前記カウンタあるいは数値制御発振器をセットしもしくはリセットすることによって、前記起点信号と短時間で同期を確立し、同期を保持できることを特徴とする請求項第1項あるいは第2項に記載の自律移動支援システムとその制御方法。
【請求項6】
前記無線マーカに接続される複数のアンテナ又は送受波器を、前記方向測定信号の1波長以下の間隔で、指向性を下方向または斜め下方向に向けて設置し、前記移動端末に接続される任意の数のアンテナ又は送受波器を、指向性を上方向または斜め上方向に向けて設置することを特徴とする請求項第1項あるいは第2項に記載する自律移動支援システムとその制御方法。
【請求項7】
前記方向測定信号の1波長以上の比較的に広い間隔で移動体に設置した複数のアンテナを、前記移動端末に接続し、周期的に切替えながら位置の特定を行い、アンテナ毎に算出した距離が比較的に短いものを選択し、あるいはアンテナ毎に特定した位置の間隔が、前記移動体に設置したアンテナの間隔に比較的に近いものを選択し、あるいは平均することを特徴とする請求項第6項に記載する自律移動支援システムとその制御方法。
【請求項8】
前記移動端末が、危険区域内を移動する、作業ロボットあるいは監視ロボットに設置されることを特徴とする請求項第1項あるいは第2項に記載する自律移動支援システムとその制御方法。
【請求項1】
超音波信号あるいは高周波信号あるいは光信号である無線信号を用いた移動支援システムにおいて、
前記無線信号を時分割で発信し受信するための、無線マーカと、移動端末とを含み、
前記移動端末の移動ルートに沿って、複数の無線マーカを間隔をおいて設置して、アドホックネットワークを構成し、
前記複数の無線マーカの内の、特定の無線マーカをノードとし、前記アドホックネットワークを、別に設けた通信回線を経由して、センタの制御サーバに接続し、
前記移動端末と無線マーカが、少なくとも、無線信号を発信し受信するための発信手段および受信手段と、前記発信手段と受信手段とを制御するための制御手段とを含み、
前記制御手段が、少なくとも、信号生成手段と、信号再生手段と、同期検出手段と、同期発振手段と、位相測定手段と、位置算出手段とを有し、
前記複数の無線マーカが、少なくとも、
報知信号を含む無線信号を、任意のタイミングでバースト信号として間欠発信し、
前記移動端末が、少なくとも、
前記複数の無線マーカの内、比較的に大きな受信入力値で受信した無線マーカを指定して、位置特定要求信号を含む無線信号を任意のタイミングで発信し、
前記指定された無線マーカが、少なくとも、
前記位置特定要求信号に含まれる起点信号と、高精度でかつ短時間に同期を確立し、同期を保持した第1の距離測定信号と、別途生成した方向測定信号とを含む無線信号を、複数の指向性アンテナ又は複数の指向性送受波器を周期的に切替えながら、時分割で発信し、
前記移動端末が、少なくとも、
前記無線マーカから受信した無線信号から、前記第1の距離測定信号と、方向測定信号とを再生し、前記自局で生成した起点信号をクロック信号として用い、前記再生した第1の距離測定信号の位相を測定して無線マーカからの距離を算出し、前記複数のアンテナ又は複数の送受波器に対応した方向測定信号の位相差を測定して無線マーカが位置する方向を算出し、前記無線マーカとの相対位置を高精度で特定するとともに、
前記再生した第1の距離測定信号と高精度でかつ短時間に同期を確立して、同期を保持した第2の距離測定信号と、別途生成した方向測定信号とを含む無線信号を、前記移動端末に向けて時分割で発信し、
前記無線マーカが、少なくとも、
前記移動端末から発信された無線信号を前記複数の指向性アンテナ又は複数の指向性送受波器を周期的に切替えながら受信した無線信号に含まれる第2の距離測定信号と、方向測定信号とを再生し、前記第1の距離測定信号をクロック信号として用い、前記再生した第2の距離測定信号の位相を測定して移動端末からの距離を算出し、前記複数のアンテナ又は複数の送受波器に対応した方向測定信号の位相差を測定して移動端末が位置する方向を算出して、前記移動端末との相対位置を高精度で特定するとともに、
前記特定した位置情報を、前記ノードとなる無線マーカを経由して、前記センタの制御サーバに向けて転送し、前記制御サーバによって、前記転送された位置情報を処理し、前記移動体の自律移動を修正し、制御し、あるいは誘導するための指令情報を、前記移動端末に向けて転送し、
前記移動端末が、少なくとも、
自局において特定した位置情報を基に移動体の自律移動を制御しあるいは誘導し、かつ前記制御サーバから転送された指令情報を基に移動体の自律移動を修正し、制御し、あるいは誘導する
ことを特徴とする自律移動支援システムとその制御方法。
【請求項2】
超音波信号あるいは高周波信号あるいは光信号である無線信号を用いた移動支援システムにおいて、
前記無線信号を時分割で発信し受信するための、無線マーカと、移動端末とを含み、
前記移動端末の移動ルートに沿って、複数の無線マーカを間隔をおいて設置して、アドホックネットワークを構成し、
前記複数の無線マーカの内の、特定の無線マーカをノードとし、前記アドホックネットワークを、別に設けた通信回線を経由して、センタの制御サーバに接続し、
前記移動端末と無線マーカが、少なくとも、無線信号を発信し受信するための発信手段と、受信手段と、前記発信手段と受信手段とを制御するための制御手段とを含み、
前記制御手段が、少なくとも、信号生成手段と、信号再生手段と、同期検出手段と、同期発振手段と、位相測定手段と位置算出手段とを有し、
前記移動端末が、少なくとも、
位置特定要求信号の発信を要求するための発信要求信号を含む無線信号を、任意のタイミングでバースト信号として間欠発信し、
前記複数の無線マーカの内、規定値以上の受信入力値で受信した無線マーカが、少なくとも、
前記受信入力値を、前記特定の無線マーカを経由して、前記制御サーバに向けて転送し、
前記制御サーバが、少なくとも、
前記転送された受信入力値を基に、無線マーカを指定して、前記位置特定要求信号の発信を指令し、
前記指定された無線マーカが、少なくとも、
前記発信要求信号に同期して、前記位置特定要求信号を含む無線信号を、前記移動端末に向けて発信し、
前記移動端末が、少なくとも、
前記位置特定要求信号に含まれる起点信号と、高精度でかつ短時間に同期を確立し、同期を保持した第1の距離測定信号と、別途生成した方向測定信号とを含む無線信号を、前記無線マーカに向けて時分割で発信し、
前記無線マーカが、少なくとも、
複数の指向性アンテナ又は複数の指向性送受波器を周期的に切替えながら、受信した無線信号から、前記第1の距離測定信号と、方向測定信号とを再生し、前記自局で生成した起点信号をクロック信号として用い、前記再生した第1の距離測定信号の位相を測定して移動端末からの距離を算出し、前記複数のアンテナ又は複数の送受波器に対応した方向測定信号の位相差を測定して移動端末が位置する方向を算出して、前記移動端末との相対位置を高精度で特定するとともに、
前記再生した第1の距離測定信号と高精度でかつ短時間に同期を確立し、前記第1の距離測定信号との同期を保持した第2の距離測定信号と、別途生成した方向測定信号とを含む無線信号を、前記複数の指向性アンテナ又は複数の指向性送受波器を周期的に切替えながら、前記移動端末に向けて時分割で発信し、
前記移動端末が、少なくとも、
前記無線マーカから、発信された無線信号に含まれる第2の距離測定信号と、方向測定信号とを再生し、前記第1の距離測定信号をクロック信号として用い、前記再生した第2の距離測定信号の位相を測定して移動端末からの距離を算出し、前記複数のアンテナ又は複数の送受波器に対応した方向測定信号の位相差を測定して移動端末が位置する方向を算出して、前記無線マーカとの相対位置を高精度で特定するとともに、
前記指定された無線マーカが特定した位置情報を、前記ノードとなる無線マーカを経由して、前記センタの制御サーバに向けて転送し、前記制御サーバによって、前記転送された位置情報を処理し、前記移動体の自律移動を修正し、制御し、あるいは誘導するための指令情報を、前記移動端末に向けて転送し、
前記移動端末が、少なくとも、
自局において特定した位置情報を基に移動体の自律移動を制御しあるいは誘導し、かつ前記制御サーバから転送された指令情報を基に移動体の自律移動を修正し、制御し、あるいは誘導する
ことを特徴とする自律移動支援システムとその制御方法。
【請求項3】
前記起点信号、距離測定信号、方向測定信号、もしくはこれらの組み合わせが、単一もしくは同期しあるいは直交する複数の、搬送波信号、副搬送波信号、変調信号、スペクトル拡散符号、もしくはこれらの組合せであることを特徴とする請求項第1項あるいは第2項に記載の自律移動支援システムとその制御方法。
【請求項4】
前記信号再生手段において、前記再生する起点信号もしくは距離測定信号が、無線信号の搬送波信号あるいは副搬送波信号である場合には、群遅延歪みの少ない帯域通過フイルタを通し、あるいは無線信号を変調した変調信号である場合には、遅延誤差の少ないアナログ復調器もしくは高い周波数のクロック信号を用いる遅延誤差の少ないデジタル復調器によって復調した後に、前記帯域通過フイルタを通して再生することを特徴とする請求項第1項あるいは第2項に記載の自律移動支援システムとその制御方法。
【請求項5】
前記同期発振手段が基準発振器によって駆動されるセットあるいはリセット付きのカウンタあるいは数値制御発振器によって構成され、復調されもしくは再生された前記起点信号もしくは位置特定信号の立上がり点、立下がり点、もしくはゼロ交差点のタイミングを、少なくとも16MHz以上の周波数のクロック信号を用いて検出し、前記検出したタイミングで、前記カウンタあるいは数値制御発振器をセットしもしくはリセットすることによって、前記起点信号と短時間で同期を確立し、同期を保持できることを特徴とする請求項第1項あるいは第2項に記載の自律移動支援システムとその制御方法。
【請求項6】
前記無線マーカに接続される複数のアンテナ又は送受波器を、前記方向測定信号の1波長以下の間隔で、指向性を下方向または斜め下方向に向けて設置し、前記移動端末に接続される任意の数のアンテナ又は送受波器を、指向性を上方向または斜め上方向に向けて設置することを特徴とする請求項第1項あるいは第2項に記載する自律移動支援システムとその制御方法。
【請求項7】
前記方向測定信号の1波長以上の比較的に広い間隔で移動体に設置した複数のアンテナを、前記移動端末に接続し、周期的に切替えながら位置の特定を行い、アンテナ毎に算出した距離が比較的に短いものを選択し、あるいはアンテナ毎に特定した位置の間隔が、前記移動体に設置したアンテナの間隔に比較的に近いものを選択し、あるいは平均することを特徴とする請求項第6項に記載する自律移動支援システムとその制御方法。
【請求項8】
前記移動端末が、危険区域内を移動する、作業ロボットあるいは監視ロボットに設置されることを特徴とする請求項第1項あるいは第2項に記載する自律移動支援システムとその制御方法。
【図1】


【図2】
【図3】

【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2011−107102(P2011−107102A)
【公開日】平成23年6月2日(2011.6.2)
【国際特許分類】
【出願番号】特願2009−265478(P2009−265478)
【出願日】平成21年11月20日(2009.11.20)
【出願人】(395007299)有限会社アール・シー・エス (51)
【出願人】(000211307)中国電力株式会社 (6,505)
【Fターム(参考)】
【公開日】平成23年6月2日(2011.6.2)
【国際特許分類】
【出願日】平成21年11月20日(2009.11.20)
【出願人】(395007299)有限会社アール・シー・エス (51)
【出願人】(000211307)中国電力株式会社 (6,505)
【Fターム(参考)】
[ Back to top ]