
自律航走体運動モニタ用ディスプレイ装置
【課題】自律航走体の運動状態を直観的にすばやく正確に把握できる自律航走体運動モニタ用ディスプレイ装置を提供する。
【解決手段】直方体における隣接する3面を構成するように互いに直交して配置された第1平面ディスプレイ13、第2平面ディスプレイ14及び第3平面ディスプレイ15を有するマルチディスプレイ12と、時間的に変化する自律航走体の運動状態を、各ディスプレイに表示させる処理装置30とを備える。処理装置30は、各ディスプレイ13〜15の画面上に自律航走体の姿勢を示す情報を表示させる。処理装置30は、各ディスプレイ13〜15の画面上に自律航走体の位置、移動軌跡及びウェイポイントを示す情報を表示させてもよい。
【解決手段】直方体における隣接する3面を構成するように互いに直交して配置された第1平面ディスプレイ13、第2平面ディスプレイ14及び第3平面ディスプレイ15を有するマルチディスプレイ12と、時間的に変化する自律航走体の運動状態を、各ディスプレイに表示させる処理装置30とを備える。処理装置30は、各ディスプレイ13〜15の画面上に自律航走体の姿勢を示す情報を表示させる。処理装置30は、各ディスプレイ13〜15の画面上に自律航走体の位置、移動軌跡及びウェイポイントを示す情報を表示させてもよい。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自律航走体の運動の様子を監視するためのディスプレイ装置に関し、特に、時間的に変化する航走体の運動の様子を直観的にすばやく正確に把握することを可能としたディスプレイ装置に関する。
【背景技術】
【0002】
従来、海底調査等を行うために、自律型無人潜水機(AUV:Autonomous Underwater Vehicle/UUV:Unmanned Underwater Vehicle)が利用されている(例えば下記特許文献1)。また、航空調査、輸送、偵察等を行うために、無人航空機(UAV:Unmanned Aerial Vehicle)が利用されている。以下、AUV(UUV)やUAVのように無人で3次元運動をする移動体を「自律航走体」とよぶ。かかる自律航走体の3次元的な運動を監視するため、従来では、自律航走体の姿勢・推進力・速度や、位置・移動軌跡を平面ディスプレイ上に表示している。
【0003】
自律航走体の姿勢・推進力・速度の表示に関しては、航走体の前後軸をX軸、左右軸をY軸、上下軸をZ軸とするXYZ直交座標系を定義し、ロール角(X軸周りの回転角)・ピッチ角(Y軸周りの回転角)・ヨー角(Z軸周りの回転角)、各スラスタ推力(前後スラスタ推力、左右スラスタ推力、上下スラスタ推力)、X軸、Y軸、Z軸ごとの速度等を個別に平面ディスプレイ上に表示している。
自律航走体の位置・移動軌跡の表示に関しては、三面図に投影した軌跡を平面ディスプレイ上にL字型の配置で表示する、もしくは任意の向きから投影した軌跡を平面ディスプレイに表示している。
【0004】
なお、自律航走体の運動を監視するものではないが、下記特許文献2には、生体内にある被検体の静的構造を容易に視認可能にするために、3枚の平面ディスプレイを立方体の隣接する3面を構成するように互いに直交に配置した医用マルチディスプレイが開示されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2007−210402号公報
【特許文献2】特開2008−257082号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
自律航走体の姿勢・推進力・速度を平面ディスプレイ上に個別に表示する従来技術では、三次元空間の中で、航走体がどの方向を向いていて、どの向きにどのくらいの推進力で、どの方向に進んでいるかを直観的にすばやく正確に把握することが難しい。
【0007】
自律航走体の位置・移動軌跡を平面ディスプレイ上にL字型の配置で表示する従来技術では、三面図が同一平面上に配置されているため、三面図の読図に慣れていないと、直観的にすばやく正確に把握することが難しい。また、平面ディスプレイ上に斜めからの投影図で表示する方法もあるが、3次元の情報を2次元平面上に表示しているために、左右方向に移動しているのか、上下方向に移動しているのかが曖昧になる場合がある。
【0008】
また、特許文献2の技術は、生体内にある被検体の3次元構造を表示することを目的としており、自律航走体の運動状態を表示することについては何ら考慮されていない。したがって、自律航走体の運動状態を直観的にすばやく正確に把握できる技術が求められる。
【0009】
本発明は、上記の問題に鑑みてなされたものであり、自律航走体の運動状態を直観的にすばやく正確に把握できる自律航走体運動モニタ用ディスプレイ装置を提供することを課題とする。
【課題を解決するための手段】
【0010】
上記の問題を解決するため、本発明の自律航走体運動モニタ用ディスプレイ装置は、以下の技術的手段を採用する。
(1)本発明の自律航走体運動モニタ用ディスプレイ装置は、直方体における隣接する3面を構成するように互いに直交して配置された第1平面ディスプレイ、第2平面ディスプレイ及び第3平面ディスプレイを有し、時間的に変化する自律航走体の運動状態を、前記第1平面ディスプレイの表示面を上に向けて水平配置されたマルチディスプレイの、異なる3面への投影によって3次元的に把握できるように前記面毎に図を生成し、生成した各図を、前記第1平面ディスプレイ、前記第2平面ディスプレイ及び前記第3平面ディスプレイに個別に表示させる処理装置と、を備えることを特徴とする。
【0011】
上記の本発明の構成によれば、第1平面ディスプレイ、第2平面ディスプレイ及び第3平面ディスプレイによって、直方体における隣接する3面を構成する形で、マルチディスプレイが構成され、自律航走体の時間的に変化する運動状態が、異なる3面に投影した図として各ディスプレイ上に表示されるので、自律航走体の3次元内での運動の様子を直観的にすばやく正確に把握できる。
【0012】
(2)また、上記の自律航走体運動モニタ用ディスプレイ装置において、前記自律航走体の前後軸をX軸、左右軸をY軸、上下軸をX軸とする直交座標系を定義したとき、前記処理装置は、前記自律航走体の前後軸の東西南北に対する方位を示す情報を前記第1平面ディスプレイに表示させ、前記自律航走体のXZ平面における姿勢を示す情報を前記第2平面ディスプレイに表示させ、前記自律航走体のYZ平面における姿勢を示す情報を前記第3平面ディスプレイに表示させる。
【0013】
このような第1実施形態によれば、自律航走体がどの方位に向いているかが第1平面ディスプレイに表示されるので、自律航走体の向きを容易に把握できる。また、自律航走体のXZ平面における姿勢が第2平面ディスプレイに表示されるので、自律航走体のピッチ角を容易に把握できる。また、また、自律航走体のYZ平面における姿勢が第3平面ディスプレイに表示されるので、自律航走体のロール角を容易に把握できる。したがって、本発明の第1実施形態によれば、時間的に変化する自律航走体の3次元内の姿勢を直観的にすばやく正確に把握できる。
【0014】
(3)また、上記の自律航走体運動モニタ用ディスプレイ装置において、前記処理装置は、前記自律航走体の実際の東西南北に対する方位と、前記第1平面ディスプレイに表示される自律航走体の向きが同じになるように、前記第1平面ディスプレイに画像を表示させる。
【0015】
上記の構成によれば、第1平面ディスプレイには、自律航走体の実際の東西南北に対する方位と同じ向きになるように自律航走体の前後軸の方向が表示されるので、ディスプレイ装置が設置されている場所(例えば車両や船舶などの乗り物)あるいは自律航走体が方向転換しても、実際の自律航走体の向きを容易に把握できる。
【0016】
(4)また、上記の自律航走体運動モニタ用ディスプレイ装置において、さらに、前記マルチディスプレイを鉛直軸周りに回転させるように駆動する旋回装置を備え、前記マルチディスプレイは、前記第1平面ディスプレイ、前記第2平面ディスプレイ及び前記第3平面ディスプレイで構成される直方体において前記第2平面ディスプレイに対面する面に配置された第4平面ディスプレイと、前記直方体において前記第3平面ディスプレイに対面する面に配置された第5平面ディスプレイとを有し、前記処理装置は、a)前記自律航走体のXZ平面における姿勢を示す情報を前記第4平面ディスプレイに表示させ、b)前記自律航走体のYZ平面における姿勢を示す情報を前記第5平面ディスプレイに表示させ、c)前記自律航走体の実際の向きと、前記第1平面ディスプレイに表示される自律航走体の向きが同じになるように、前記旋回装置を制御する。
【0017】
上記の構成によれば、マルチディスプレイが実際の自律航走体の向きに合わせて回転するので、ディスプレイ装置が設置されている場所(例えば車両や船舶などの乗り物)あるいは自律航走体が方向転換しても、実際の自律航走体の向きを容易に把握できる。
また、さらに第4平面ディスプレイと第5平面ディスプレイを備えることで、マルチディスプレイが回転しても、自律航走体のXZ平面における姿勢とYZ平面における姿勢を容易に把握できる。
また、第1〜第5平面ディスプレイが一体となって回転するので、第1平面ディスプレイに表示される自律航走体の向きと、第2〜第5平面ディスプレイに表示される自律航走体の向きが整合するので、自律航走体の向きを一層容易に把握できる。
【0018】
(5)また、上記の自律航走体運動モニタ用ディスプレイ装置において、前記処理装置は、前記自律航走体のXY平面における移動方向とその速度を示す情報を前記第1平面ディスプレイに表示させ、前記自律航走体のXZ平面における移動方向とその速度を示す情報を前記第2平面ディスプレイに表示させ、前記自律航走体のYZ平面における移動方向とその速度を示す情報を前記第3平面ディスプレイに表示させる。
【0019】
上記の構成によれば、各ディスプレイ上に、各面に対応した移動方向とその速度を示す情報が表示されるので、3次元空間における自律航走体の移動方向と速度を容易に把握できる。
【0020】
(6)また、上記の自律航走体運動モニタ用ディスプレイ装置において、前記処理装置は、前記自律航走体の前後スラスタ推力を示す情報と、前記自律航走体の左右スラスタ推力を示す情報を前記第1平面ディスプレイに表示させ、前記自律航走体の前後スラスタ推力を示す情報と、前記自律航走体の上下スラスタ推力を示す情報を前記第2平面ディスプレイに表示させ、前記自律航走体の左右スラスタ推力を示す情報と、前記自律航走体の上下スラスタ推力を示す情報を前記第3平面ディスプレイに表示させる。また、各平面ディスプレイに垂直な軸周りの回転モーメントを各平面ディスプレイ表示しても良い。
【0021】
上記の構成によれば、各ディスプレイ上に、各面に対応したスラスタ推力・モーメントを示す情報が表示されるので、3次元空間における自律航走体のスラスタ推力・モーメントを容易に把握できる。
【0022】
(7)また、上記の自律航走体運動モニタ用ディスプレイ装置において、前記処理装置は、前記自律航走体の位置及び移動軌跡を、直交する3面に投影した画像として、前記第1平面ディスプレイ、前記第2平面ディスプレイ及び前記第3平面ディスプレイに表示させる。
【0023】
このような第3実施形態によれば、自律航走体の位置及び移動軌跡が直交する3面に投影した形で、各ディスプレイ上に表示されるので、時間的に変化する自律航走体の位置・移動軌跡を直観的にすばやく正確に把握できる。
【0024】
(8)また、上記の自律航走体運動モニタ用ディスプレイ装置において、前記処理装置は、前記自律航走体の実際の移動軌跡の向きと、前記マルチディスプレイに表示される移動軌跡の向きが同じになるように、前記マルチディスプレイに画像を表示させる。
【0025】
上記の構成によれば、自律航走体の実際の移動軌跡の方向と、マルチディスプレイに表示される移動軌跡の方向が一致するので、ディスプレイ装置が設置されている場所(例えば車両や船舶などの乗り物)あるいは自律航走体が方向転換しても、実際の自律航走体の移動軌跡を容易に把握できる。
【0026】
(9)また、上記の自律航走体運動モニタ用ディスプレイ装置において、さらに、前記マルチディスプレイを、鉛直軸周りに回転自在に支持、あるいは鉛直軸周りに回転させるように駆動する旋回機構を備え、前記マルチディスプレイは、前記第1平面ディスプレイ、前記第2平面ディスプレイ及び前記第3平面ディスプレイで構成される直方体において前記第2平面ディスプレイに対面する面に配置された第4平面ディスプレイと、前記直方体において前記第3平面ディスプレイに対面する面に配置された第5平面ディスプレイとを有し、前記処理装置は、a)互いに直交する5投影面のうち前記第2平面ディスプレイに対応する鉛直面と平行な鉛直面に対して前記自律航走体の位置及び移動軌跡を投影した画像を前記第4平面ディスプレイに表示させ、b)互いに直交する5投影面のうち前記第3平面ディスプレイに対応する鉛直面と平行な鉛直面に対して前記自律航走体の位置及び移動軌跡を投影した画像を前記第5平面ディスプレイに表示させる。
【0027】
上記の構成によれば、マルチディスプレイを回転させることで第2〜第5ディスプレイに表示される投影画像が変化するので、確認したいポイントの軌跡をすばやく正確に把握することができる。
【0028】
(10)また、上記の自律航走体運動モニタ用ディスプレイ装置において、前記処理装置は、前記自律航走体のウェイポイントを、前記第1平面ディスプレイ、前記第2平面ディスプレイ及び前記第3平面ディスプレイに表示させる。
【0029】
上記の構成によれば、各ディスプレイ上に、各面に対応したウェイポイントを示す情報が表示されるので、3次元空間における自律航走体のウェイポイントを容易に把握できる。
【0030】
(11)また、上記の自律航走体運動モニタ用ディスプレイ装置において、前記処理装置は、前記第1平面ディスプレイ、前記第2平面ディスプレイ及び前記第3平面ディスプレイに、各移動軌跡間の対応点を表示させる。
【0031】
上記の構成によれば、各平面ディスプレイに表示される移動軌跡の、平面ディスプレイ間における対応点が表示されるので、各平面ディスプレイ間の対応関係の把握が容易となる。
【発明の効果】
【0032】
本発明の自律航走体運動モニタ用ディスプレイ装置によれば、自律航走体の運動予定経路及び運動状態を直観的にすばやく正確に把握できる。
【図面の簡単な説明】
【0033】
【図1】本発明の自律航走体運動モニタ用ディスプレイ装置を用いたモニタリングシステムの概要を示す図である。
【図2】本発明の自律航走体運動モニタ用ディスプレイ装置の第1実施形態を示す図である。
【図3A】本発明の自律航走体運動モニタ用ディスプレイ装置の第2実施形態を示す図である。
【図3B】本発明の自律航走体運動モニタ用ディスプレイ装置の第2実施形態の示す別の図である。
【図4】本発明の自律航走体運動モニタ用ディスプレイ装置の第3実施形態を示す図である。
【図5】本発明の自律航走体運動モニタ用ディスプレイ装置の第4実施形態を示す図である。
【発明を実施するための形態】
【0034】
以下、本発明の好ましい実施形態を添付図面に基づいて詳細に説明する。なお、各図において共通する部分には同一の符号を付し、重複した説明を省略する。
【0035】
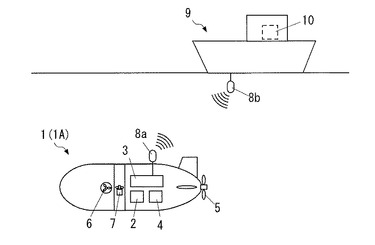
図1は、本発明の自律航走体運動モニタ用ディスプレイ装置10を用いたモニタリングシステムの概要を示す図である。以下、自律航走体運動モニタ用ディスプレイ装置を、単に「ディスプレイ装置」という。
【0036】
図1において、自律航走体1は、自律型無人潜水機(AUV)1Aであり、自律型無人潜水機1Aは水中を航行している。ただし、本発明において、モニタリングの対象となる自律航走体1は、AUVに限られず、無人航空機(UAV)であってもよい。
【0037】
自律航走体1は、電力源である電池4と、自律航走体1の行動及び作動を制御する航行制御装置3と、自律航走体1の位置を算出する慣性航法装置2と、前進する推力を発生させる前後スラスタ5と、上下方向の推力を発生させる上下スラスタ7と、左右方向の推力を発生させる左右スラスタ6と、通信信号の送受信を行う航走体側通信機8aとを備える。
【0038】
慣性航法装置2は、仮想の固定座標上における自己位置を運動履歴により随時算出する装置である。具体的には、慣性航法装置2は、三次元の速度変化を検出する装置(加速度計、速度計など)と、姿勢変化を検出する装置(ジャイロ、方位計、姿勢計など)とを備えたものであり、出発点からの速度や姿勢変化を累積的に計算する慣性航法により固定座標における自己位置を把握できる構成となっている。
【0039】
航行制御装置3は、慣性航法装置2によって随時算出される自己位置及び姿勢の情報を使用し、予め設定された行動パターンに従って自律航走体1が動作するように、各スラスタ5、6、7を制御する。
【0040】
航走体側通信機8aは、慣性航法装置2によって随時算出される自己位置、姿勢、移動方向とその速度、航行制御装置3によって算出される各スラスタ5、6、7の推力の情報等を、船舶9に向けて送信する。図1において、航走体側通信機8aは、音波信号を送受信する機能を有する音響伝送用送受波器として構成されている。
【0041】
水上には船舶9が浮遊している。この船舶9には、本発明のディスプレイ装置10が設置されている。なおディスプレイ装置10は、陸上施設、あるいは車両などの陸上を移動可能な乗り物及び空中を移動可能な乗り物に設置されてもよい。
【0042】
また船舶9には、通信信号の送受信を行うためのモニタ側通信機8bが設けられている。このモニタ側通信機8bで受信した信号は、ディスプレイ装置10に送信されるようになっている。図1において、モニタ側通信機8bは、音波信号を送受信する機能を有する音響伝送用送受波器として構成されている。したがって、航走体側通信機8aとモニタ側通信機8bとによって双方向通信が可能な通信装置が構成されている。
【0043】
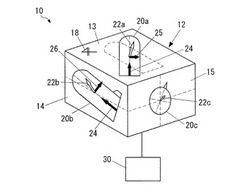
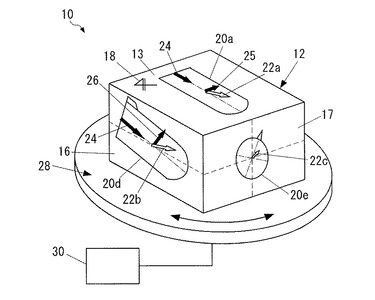
図2は、本発明のディスプレイ装置10の第1実施形態を示す図である。図2に示すように、ディスプレイ装置10は、マルチディスプレイ12と処理装置30とを備える。
【0044】
本発明の第1実施形態において、マルチディスプレイ12は、直方体における隣接する3面を構成するように互いに直交して配置された第1平面ディスプレイ13、第2平面ディスプレイ14及び第3平面ディスプレイ15を有しており、第1平面ディスプレイ13は表示面を上に向けて水平配置されている。
【0045】
平面ディスプレイには、液晶ディスプレイ、プラズマディプレイ、有機ELディスプレイ、電界効果ディスプレイなどがあり、上述の第1〜第3平面ディスプレイ13〜15としては、どのような種類の平面ディスプレイも適用可能である。また、第1〜第3平面ディスプレイ13〜15は、長方形、正方形のいずれでもよい。
【0046】
処理装置30は、時間的に変化する自律航走体1の運動状態を、異なる3面への投影によって3次元的に把握できるように面毎に図を生成し、生成した各図を、第1平面ディスプレイ13、第2平面ディスプレイ14及び第3平面ディスプレイ15に個別に表示させる機能を有する。
【0047】
第1実施形態において、処理装置30は、自律航走体1から送信されてきた自律航走体1の姿勢、移動方向とその速度、及び各スラスタの推力の情報を使用し、以下の処理を行うように構成されている。
ここで、自律航走体1の前後軸をX軸(前がプラス)、左右軸をY軸(右がプラス)、上下軸をZ軸(下がプラス)とするXYZ直交座標系を定義する。
【0048】
処理装置30は、自律航走体1の前後軸の東西南北に対する方位を示す情報を第1平面ディスプレイ13に表示させる。図2に示す構成では、第1平面ディスプレイ13に、真北方向を示すマーク18とともに、自律航走体1を表現した絵20aが表示されている。このマーク18は、実際の真北方向を指している。したがって、船舶9などの、ディスプレイ装置10が搭載された乗り物が向きを変えた場合には、第1平面ディスプレイ13に表示されたマーク18は、真北方向を指すように第1平面ディスプレイ13上で回転して、向きを変える。
【0049】
処理装置30は、自律航走体1の実際の東西南北に対する方位と、第1平面ディスプレイ13に表示される自律航走体1の絵20aの向きが同じになるように、第1平面ディスプレイ13に画像を表示させるように構成されている。したがって、水中の自律航走体1が向きを変えた場合には、第1平面ディスプレイ13に表示された自律航走体1の絵20aも、実際の自律航走体1の向きと一致するように、第1平面ディスプレイ13上で回転して、向きを変える。例えば、図2において、第1平面ディスプレイ13上に破線で示すように、自律航走体1の絵20aが向きを変える。
【0050】
上述のように、真北方向を示すマーク18と、実際の自律航走体1の向きと同じ向きの絵20aが第1平面ディスプレイ13に表示されるので、第1平面ディスプレイ13を見ることにより、実際の自律航走体1の向きと真北に対する方位角度を容易に把握できる。なお、自律航走体1の向きについては、絵20aに加えて、文字や数字によって表現したものを第1平面ディスプレイ13に併せて表示してもよい。
【0051】
処理装置30は、自律航走体1のXZ平面における姿勢を示す情報を第2平面ディスプレイ14に表示させる。図2に示す構成では、第2平面ディスプレイ14に、XZ平面に投影した自律航走体1を表現した絵20bが表示されている。自律航走体1の絵20bは、図2では、自律航走体1を左側から見た絵となっているが、右側から見た絵でもよい。またこの絵20bには、自律航走体1の前後軸も表現されている。この前後軸は、図2では、第2平面ディスプレイ14の画面上に一点鎖線で表現されている。
【0052】
したがって、第2平面ディスプレイ14を見ることにより、実際の自律航走体1のピッチ角(Y軸周りの回転角)を容易に把握できる。なお、自律航走体1のXZ平面における姿勢については、絵20bに加えて、文字や数字によってピッチ角を表現したものを第2平面ディスプレイ14に併せて表示してもよい。
【0053】
処理装置30は、自律航走体1のYZ平面における姿勢を示す情報を第3平面ディスプレイ15に表示させる。図2に示す構成では、第3平面ディスプレイ15に、YZ平面に投影した自律航走体1を表現した絵20cが表示されている。自律航走体1の絵20cは、図2では、自律航走体1を後ろから見た絵となっているが、前から見た絵でもよい。またこの絵20cには自律航走体1の上下軸と左右軸も表現されている。この上下軸と左右軸は、図2では、第3平面ディスプレイ15の画面上に一点鎖線で表現されている。
【0054】
したがって、第3平面ディスプレイ15を見ることにより、実際の自律航走体1のロール角(X軸周りの回転角)を容易に把握できる。なお、自律航走体1のYZ平面における姿勢については、絵20cに加えて、文字や数字によってロール角を表現したものを第3平面ディスプレイ15に併せて表示してもよい。
【0055】
処理装置30は、図2に示すように、自律航走体1のXY平面における移動方向とその速度を示す情報を第1平面ディスプレイ13に表示させてもよい。図2に示す構成では、自律航走体1のXY平面における移動方向とその速度は、白抜きのベクトル22aで表現されている。なお、この場合、自律航走体1のXY平面における移動方向とその速度については、白抜きのベクトル22aに加えて、文字や数字によって表現したものを第1平面ディスプレイ13に併せて表示してもよい。
【0056】
処理装置30は、図2に示すように、自律航走体1の前後スラスタ推力を示す情報と、自律航走体1の左右スラスタ推力を示す情報を第1平面ディスプレイ13に表示させてもよい。図2に示す構成では、自律航走体1の前後スラスタ推力はベクトル24で表現され、左右スラスタ推力は、ベクトル25で表現されている。なお、この場合、自律航走体1の前後スラスタ推力と左右スラスタ推力については、ベクトル24、25に加えて、文字や数字によって表現したものを第1平面ディスプレイ13に併せて表示してもよい。
【0057】
処理装置30は、図2に示すように、自律航走体1のXZ平面における移動方向とその速度を示す情報を第2平面ディスプレイ14に表示させてもよい。図2に示す構成では、自律航走体1のXZ平面における移動方向とその速度は、白抜きのベクトル22bで表現されている。なお、この場合、自律航走体1のXZ平面における移動方向とその速度については、白抜きのベクトル22bに加えて、文字や数字によって表現したものを第2平面ディスプレイ14に併せて表示してもよい。
【0058】
処理装置30は、図2に示すように、自律航走体1の前後スラスタ推力を示す情報と、自律航走体1の上下スラスタ推力を示す情報を第2平面ディスプレイ14に表示させてもよい。図2に示す構成では、自律航走体1の前後スラスタ推力は、第1平面ディスプレイ13のそれと同様に、ベクトル24で表現され、上下スラスタ推力はベクトル26で表現されている。なお、この場合、自律航走体1の前後スラスタ推力と上下スラスタ推力については、ベクトル24、26に加えて、文字や数字によって表現したものを第2平面ディスプレイ14に併せて表示してもよい。
【0059】
処理装置30は、図2に示すように、自律航走体1のYZ平面における移動方向とその速度を示す情報を第3平面ディスプレイ15に表示させてもよい。図2に示す構成では、自律航走体1のYZ平面における移動方向とその速度は、白抜きのベクトル22cで表現されている。なお、この場合、自律航走体1のYZ平面における移動方向とその速度については、白抜きのベクトル22cに加えて、文字や数字によって表現したものを第3平面ディスプレイ15に併せて表示してもよい。
処理装置30は、図2には示していないが、自律航走体1の左右スラスタ推力を示す情報と、自律航走体1の上下スラスタ推力を示す情報を第3平面ディスプレイ15に表示させてもよい。なお、この場合、自律航走体1の左右スラスタ推力と上下スラスタ推力については、ベクトルでの表示に加えて、文字や数字によって表現したものを第3平面ディスプレイ15に併せて表示してもよい。
【0060】
上述した本発明の第1実施形態によれば、自律航走体1がどの方位に向いているかが第1平面ディスプレイ13に表示されるので、自律航走体1の向きを容易に把握できる。また、自律航走体1のXZ平面における姿勢が第2平面ディスプレイ14に表示されるので、自律航走体1のピッチ角を容易に把握できる。また、また、自律航走体1のYZ平面における姿勢が第3平面ディスプレイ15に表示されるので、自律航走体1のロール角を容易に把握できる。したがって、本発明の第1実施形態によれば、時間的に変化する自律航走体1の3次元内の姿勢を直観的にすばやく正確に把握できる。
【0061】
また、第1平面ディスプレイ13には、自律航走体1の実際の東西南北に対する方位と同じ向きになるように自律航走体1の前後軸の方向が表示されるので、ディスプレイ装置10が設置されている場所(例えば車両や船舶などの乗り物)あるいは自律航走体1が方向転換しても、実際の自律航走体1の向きを容易に把握できる。
【0062】
また、各平面ディスプレイ13〜15の画面上に、各面に対応した移動方向とその速度を示す情報として、ベクトル22a〜22cが表示されるので、3次元空間における自律航走体1の移動方向と速度を容易に把握できる。
また、各平面ディスプレイ13〜15の画面上に、各面に対応したスラスタ推力を示す情報として、ベクトル24〜26が表示されるので、3次元空間における自律航走体1のスラスタ推力を容易に把握できる。
【0063】
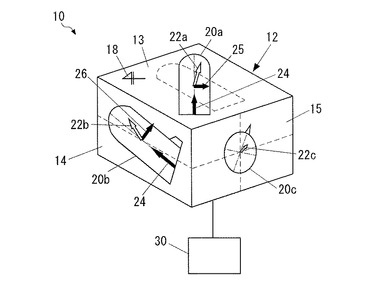
図3A及び図3Bは、本発明のディスプレイ装置10の第2実施形態を示す図である。図3A及び図3Bに示すように、本発明のディスプレイ装置10の第2実施形態は、さらに、マルチディスプレイ12を鉛直軸周りに回転させるように駆動する旋回装置28を備える。旋回装置28の駆動源としては、電動回転モータを用いることができる。図3Bは、図3Aに示す状態から、旋回装置28によりマルチディスプレイ12を時計回りに180度回転させた状態を示している。
【0064】
処理装置30は、自律航走体1の前後軸の東西南北に対する方位を示す情報として、第1実施形態と同様に、第1平面ディスプレイ13に、真北方向を示すマーク18とともに、自律航走体1を表現した絵20aを表示させる。このマーク18は、実際の真北方向を指している。したがって、マルチディスプレイ12が向きを変えた場合には、第1平面ディスプレイ13に表示されたマーク18は、真北方向を指すように第1平面ディスプレイ13上で回転して、向きを変える。
【0065】
第2実施形態では、自律航走体1が実際に向きを変えても、第1平面ディスプレイ13の画面に対する絵20aの向きは変わらず、固定されている。代わりに、処理装置30は、自律航走体1の実際の向きと、第1平面ディスプレイ13に表示される自律航走体1の絵20aの向きが同じになるように、旋回装置28を制御する。したがって、水中の自律航走体1が向きを変えた場合には、第1平面ディスプレイ13の画面に対する絵20aの向きは変わらないが、実際の自律航走体1の向きと第1平面ディスプレイ13に表示された絵20aの向きが一致するように、処理装置30による制御のもと、マルチディスプレイ12が旋回装置28によって回転させられる。
【0066】
図3Aに示すように、処理装置30は、自律航走体1を左側から見たときの自律航走体1のXZ平面における姿勢を示す情報を第2平面ディスプレイ14に表示させる。第2平面ディスプレイ14に表示されるものは、第1実施形態と同様に、自律航走体1を表現した絵20b、自律航走体1の移動方向とその速度を示すベクトル22b、前後スラスタ推力と上下スラスタ推力を示すベクトル24、26でよい。
【0067】
図3Aに示すように、処理装置30は、自律航走体1を後ろから見たときの自律航走体1のYZ平面における姿勢を示す情報を第3平面ディスプレイ15に表示させる。第3平面ディスプレイ15に表示されるものは、第1実施形態と同様に、自律航走体1を表現した絵20c、自律航走体1の移動方向とその速度を示すベクトル22でよい。図中には示していないが、左右スラスタ推力と上下スラスタ推力のベクトルでの表示を加えてもよい。
【0068】
図3Bに示すように、マルチディスプレイ12は、さらに、第1平面ディスプレイ13、第2平面ディスプレイ14及び第3平面ディスプレイ15で構成される直方体において第2平面ディスプレイ14に対面する面に配置された第4平面ディスプレイ16と、前記直方体において第3平面ディスプレイ15に対面する面に配置された第5平面ディスプレイ17とを有している。第4平面ディスプレイ16と第5平面ディスプレイ17は、長方形、正方形のいずれでもよい。
【0069】
処理装置30は、自律航走体1を右側から見たときの自律航走体1のXZ平面における姿勢を示す情報を第4平面ディスプレイ16に表示させる。図3Bに示す構成では、右側面側からXZ平面に投影した自律航走体1を表現した絵20dが表示されている。処理装置30は、第2平面ディスプレイ14の表示と同様に、自律航走体1の移動方向とその速度を示すベクトル22bと、前後スラスタ推力及び上下スラスタ推力を示すベクトル24、26を第4平面ディスプレイ16に表示させてもよい。
【0070】
処理装置30は、自律航走体1を前から見たときの自律航走体1のYZ平面における姿勢を示す情報を第5平面ディスプレイ17に表示させる。図3Bに示す構成では、YZ平面に投影した自律航走体1を表現した絵20eが表示されている。処理装置30は、第3平面ディスプレイ15の表示と同様に、自律航走体1の移動方向とその速度を示すベクトル22cを第5平面ディスプレイ17に表示させてもよい。
処理装置30は、図3Bには示していないが、自律航走体1の左右スラスタ推力を示す情報と、自律航走体1の上下スラスタ推力を示す情報を第5平面ディスプレイ17に表示させてもよい。
【0071】
上述した本発明の第2実施形態によれば、自律航走体1がどの方位に向いているかが第1平面ディスプレイ13に表示されるので、自律航走体1の向きを容易に把握できる。また、自律航走体1のXZ平面における姿勢が第2平面ディスプレイ14と第4平面ディスプレイ16に表示されるので、自律航走体1のピッチ角を容易に把握できる。また、自律航走体1のYZ平面における姿勢が第3平面ディスプレイ15と第5平面ディスプレイ17に表示されるので、自律航走体1のロール角を容易に把握できる。したがって、本発明の第2実施形態によれば、時間的に変化する自律航走体1の3次元内の姿勢を直観的にすばやく正確に把握できる。
【0072】
また、マルチディスプレイ12が実際の自律航走体1の向きに合わせて回転するので、ディスプレイ装置10が設置されている場所(例えば車両や船舶などの乗り物)あるいは自律航走体1が方向転換しても、実際の自律航走体1の向きを容易に把握できる。
また、第1〜第3平面ディスプレイ13〜15に加えて、第4平面ディスプレイ16と第5平面ディスプレイ17を備えることで、マルチディスプレイ12が回転しても、自律航走体1のXZ平面における姿勢とYZ平面における姿勢を容易に把握できる。
【0073】
また、第1〜第5平面ディスプレイ13〜17が一体となって回転するので、第1平面ディスプレイ13に表示される自律航走体1の向きと、第2〜第5平面ディスプレイ14〜17に表示される自律航走体1の絵20b〜20eの向きが整合するので、自律航走体1の向きを一層容易に把握できる。
【0074】
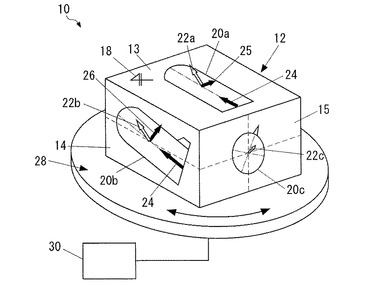
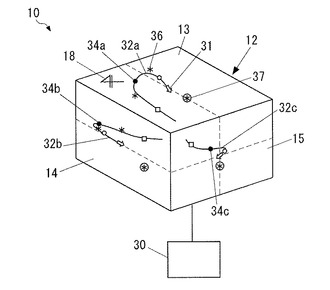
図4は、本発明のディスプレイ装置10の第3実施形態を示す図である。
本発明の第3実施形態において、マルチディスプレイ12は、第1実施形態と同様に、直方体における隣接する3面を構成するように互いに直交して配置された第1平面ディスプレイ13、第2平面ディスプレイ14および第3平面ディスプレイ15を備える。
【0075】
処理装置30は、東西南北の方位を示すマーク18を第1平面ディスプレイ13に表示させる。このマーク18は、実際の真北方向を指すようにしてもよいし、任意に仮想的に設定した真北方向を指すようにしてもよい。実際の真北方向を指すようにマーク18を表示させた場合、船舶などの、ディスプレイ装置10が搭載された乗り物が向きを変えた場合には、第1平面ディスプレイ13に表示されたマーク18は、真北方向を指すように第1平面ディスプレイ13上で回転して、向きを変える。
【0076】
時間的に変化する自律航走体1の運動状態を示す情報として、上述した第1実施形態と第2実施形態では、自律航走体1の姿勢や移動方向をマルチディスプレイ12に表示させたが、第3実施形態では、自律航走体1の位置及び移動軌跡をマルチディスプレイ12に表示させる。具体的には、処理装置30は、自律航走体1の位置及び移動軌跡を、直交する3面に投影した画像として、第1平面ディスプレイ13、第2平面ディスプレイ14及び第3平面ディスプレイ15に表示させる。
【0077】
処理装置30は、互いに直交する5投影面のうち水平面に対して自律航走体1の位置及び移動軌跡を投影した画像を第1平面ディスプレイ13に表示させ、互いに直交する5投影面のうち一つの鉛直面(これを第1鉛直面とよぶ)に対して自律航走体1の位置及び移動軌跡を投影した画像を第2平面ディスプレイ14に表示させ、互いに直交する5投影面のうち水平面及び第1鉛直面に直交する鉛直面に対して自律航走体1の位置及び移動軌跡を投影した画像を第3平面ディスプレイ15に表示させる。
【0078】
自律航走体1の位置は、図4の構成では、第1〜第3平面ディスプレイ13〜15の画面上では矢印31で表現されている。また、自律航走体1の移動軌跡は、図4の構成では、第1〜第3平面ディスプレイ13〜15の画面上で実線のライン32a、32b、32cで表現されている。
【0079】
処理装置30は、実際の真北方向を指すようにマーク18を表示させた場合、自律航走体1の実際の移動軌跡の向きと、マルチディスプレイ12装置10に表示される移動軌跡の向きが同じになるように、マルチディスプレイ12に画像を表示させる。これにより、実際の自律航走体1の移動軌跡の向きを容易に把握できる。
あるいは、処理装置30は、第1平面ディスプレイ13の画面上の真北方向を任意の方向に回転させ、第2平面ディスプレイ14と第3平面ディスプレイ15に表示させる投影面を変化させてもよい。このようにすると、確認したい軌跡の近傍の把握を容易にできる。
【0080】
処理装置30は、自律航走体1のウェイポイントを、第1平面ディスプレイ13、第2平面ディスプレイ14及び第3平面ディスプレイ15に表示させてもよい。図4に示す構成では、ウェイポイントは、“*”の記号36と、“*”を白抜きの丸で囲んだ記号37で表現されている。このうち、“*”の記号36は、過去のウェイポイント、つまり予定されていた通過点を示している。また、“*”を白抜きの丸で囲んだ記号37は、現在向かっているウェイポイント、つまり現在目標としている通過点あるいは到達点を示している。
現在位置に対して過去のウェイポイント表示数、これから向うウェイポイント表示数を設定できるようにし、設定された数のウェイポイントを表示してもよい。
【0081】
処理装置30は、第1平面ディスプレイ13、第2平面ディスプレイ14及び第3平面ディスプレイ15に、各移動軌跡間の対応点34a、34b、34cを表示させてもよい。対応点を複数設定する場合、移動軌跡上の異なる位置における各対応点を視覚的に区別できるように、対応点を表示させるのがよい。図4に示す構成では、異なる対応点が、白抜きの丸、黒塗りの丸、白抜きの四角で表現されている。なお、色や大きさで複数の異なる対応点を視覚的に区別できるようにしてもよい。
また、表示されている全体の移動軌跡上を対応点が周期的に移動するようにして、対応するポイントがわかるようにしてもよい。
【0082】
上述した本発明の第3実施形態によれば、自律航走体1の位置及び移動軌跡が、直交する3面に投影した形で、各平面ディスプレイ13〜15上に表示されるので、時間的に変化する自律航走体1の位置・移動軌跡を直観的にすばやく正確に把握できる。
【0083】
また、自律航走体1の実際の移動軌跡の方向と、マルチディスプレイ12に表示される移動軌跡の方向が一致するように、マルチディスプレイ12に移動軌跡を表示させれば、ディスプレイ装置10が設置されている場所(例えば車両や船舶などの乗り物)あるいは自律航走体1が方向転換しても、実際の自律航走体1の移動軌跡を容易に把握できる。
【0084】
また、各平面ディスプレイ13〜15の画面上に、各面に対応したウェイポイントを示す情報が表示されるので、3次元空間における自律航走体1のウェイポイントを容易に把握できる。
また、各平面ディスプレイ13〜15の画面上に表示される移動軌跡の、各平面ディスプレイ間における対応点が表示されるので、各平面ディスプレイ間の対応関係の把握が容易となる。
【0085】
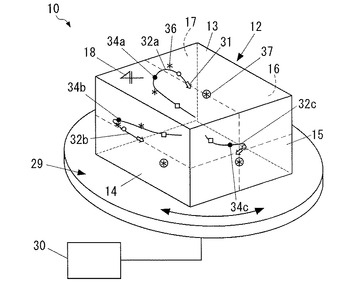
図5は、本発明のディスプレイ装置10の第4実施形態を示す図である。
本発明のディスプレイ装置10の第4実施形態において、マルチディスプレイ12は、第2実施形態と同様に、直方体における隣接する3面を構成するように互いに直交して配置された第1平面ディスプレイ13、第2平面ディスプレイ14及び第3平面ディスプレイ15を備え、さらに、第1平面ディスプレイ13、第2平面ディスプレイ14及び第3平面ディスプレイ15で構成される直方体において第2平面ディスプレイ14に対面する面に配置された第4平面ディスプレイ16と、前記直方体において第3平面ディスプレイ15に対面する面に配置された第5平面ディスプレイ17とを有している。第4平面ディスプレイ16と第5平面ディスプレイ17は、長方形、正方形のいずれでもよい。
【0086】
ディスプレイ装置10は、さらに、旋回機構29を備える。旋回機構29は、2面のディスプレイ平面に平行してマルチディスプレイ中心を通る軸を軸とする鉛直軸周りに回転自在に支持するもの、つまり手動で回転できるものでも、電動回転モータのような駆動源によりマルチディスプレイ12を鉛直軸周りに回転させるように駆動するものでもよい。
【0087】
処理装置30は、東西南北の方位を示すマーク18を第1平面ディスプレイ13に表示させる。このマーク18は、実際の真北方向を指すように表示される。したがって、船舶などの、ディスプレイ装置10が搭載された乗り物が向きを変えた場合には、第1平面ディスプレイ13に表示されたマーク18は、真北方向を指すように第1平面ディスプレイ13上で回転して、向きを変える。
【0088】
処理装置30は、自律航走体1の位置及び移動軌跡を、直交する5面に投影した画像として、第1〜第5平面ディスプレイ13〜17に表示させる。具体的には、処理装置30は、第1〜第5平面ディスプレイ13〜17に少なくとも以下の事項を表示させる。
【0089】
a)処理装置30は、互いに直交する5投影面のうち水平面に対して自律航走体1の位置及び移動軌跡を投影した画像を第1平面ディスプレイ13に表示させる。
b)処理装置30は、互いに直交する5投影面のうち一つの鉛直面(これを第1鉛直面とよぶ)に対して自律航走体1の位置及び移動軌跡を投影した画像を第2平面ディスプレイ14に表示させる。
c)処理装置30は、互いに直交する5投影面のうち水平面及び第1鉛直面に直交する鉛直面(これを第2鉛直面とよぶ)に対して自律航走体1の位置及び移動軌跡を投影した画像を第3平面ディスプレイ15に表示させる。
d)処理装置30は、互いに直交する5投影面のうち第2平面ディスプレイ14に対応する面(第1鉛直面)と平行な鉛直面に対して自律航走体1の位置及び移動軌跡を投影した画像を第4平面ディスプレイ16に表示させる。
e)処理装置30は、互いに直交する5投影面のうち第3平面ディスプレイ15に対応する面(第2鉛直面)と平行な鉛直面に対して自律航走体1の位置及び移動軌跡を投影した画像を第5平面ディスプレイ17に表示させる。
【0090】
自律航走体1の位置は、図4の構成では、第3実施形態と同様に、第1〜第5平面ディスプレイ13〜17の画面上で白抜きの矢印31で表現されている。また、自律航走体1の移動軌跡は、図4の構成では、第3実施形態と同様に、第1〜第5平面ディスプレイ17の画面上に実線のライン32a、32b、32cで表現されている。
【0091】
処理装置30は、自律航走体1の実際の移動軌跡の向きと、マルチディスプレイ12装置10に表示される移動軌跡の向きが同じになるように、マルチディスプレイ12に画像を表示させる。これにより、実際の自律航走体1の移動軌跡の向きを容易に把握できる。
【0092】
処理装置30は、自律航走体1のウェイポイントを第1〜第5平面ディスプレイ13〜17に表示させてもよい。この場合、ウェイポイントは、第3実施形態と同様に、“*”の記号36と、“*”を白抜きの丸で囲んだ記号37で表現されてもよい。
【0093】
処理装置30は、第1〜第5平面ディスプレイ13〜17に、各移動軌跡間の対応点を表示させてもよい。対応点を複数設定する場合は、第3実施形態と同様に、移動軌跡上の異なる位置における各対応点を視覚的に区別できるように、対応点を表示させるのがよい。
また、表示されている全体の移動軌跡上を対応点が周期的に移動するようにして、対応するポイントがわかるようにしてもよい。
【0094】
上述した第4実施形態によれば、第3実施形態と同様に、時間的に変化する自律航走体1の位置・移動軌跡を直観的にすばやく正確に把握でき、3次元空間における自律航走体1のウェイポイントを容易に把握でき、各平面ディスプレイ間の対応関係の把握が容易となる。
また、第4実施形態によれば、マルチディスプレイ12を回転させることで第2〜第5平面ディスプレイ14〜17に表示される投影画像が変化するので、確認したいポイントの軌跡をすばやく正確に把握することができる。
【0095】
なお、上述した第1実施形態と第3実施形態、あるいは、第2実施形態と第4実施形態を組み合わせ、自律航走体1の姿勢(必要に応じて、さらに移動方向とその速度、各スラスタ推力)を示す情報を表示させるモードと、自律航走体1の位置及び移動軌跡(必要に応じて、さらに移動軌跡間の対応点、ウェイポイント)を示す情報を表示させるモードとを切り替えられるように、処理装置30を構成してもよい。
【0096】
上記において、本発明の実施形態について説明を行ったが、上記に開示された本発明の実施の形態は、あくまで例示であって、本発明の範囲はこれら発明の実施の形態に限定されない。本発明の範囲は、特許請求の範囲の記載によって示され、さらに特許請求の範囲の記載と均等の意味および範囲内でのすべての変更を含むものである。
【符号の説明】
【0097】
1 自律航走体
1A 自律型無人潜水機
10 自律航走体運動モニタ用ディスプレイ装置
12 マルチディスプレイ
13 第1平面ディスプレイ
14 第2平面ディスプレイ
15 第3平面ディスプレイ
16 第4平面ディスプレイ
17 第5平面ディスプレイ
18 方位を示すマーク
20a〜20e 自律航走体の絵
22a〜22c 移動方向とその速度を示すベクトル
24 前後スラスタ推力を示すベクトル
25 左右スラスタ推力を示すベクトル
26 上下スラスタ推力を示すベクトル
28 旋回装置
29 旋回機構
30 処理装置
31 自律航走体の位置を示す記号
32a〜32c 自律航走体の移動軌跡を示すライン
34a〜34c 対応点
36 ウェイポイント
【技術分野】
【0001】
本発明は、自律航走体の運動の様子を監視するためのディスプレイ装置に関し、特に、時間的に変化する航走体の運動の様子を直観的にすばやく正確に把握することを可能としたディスプレイ装置に関する。
【背景技術】
【0002】
従来、海底調査等を行うために、自律型無人潜水機(AUV:Autonomous Underwater Vehicle/UUV:Unmanned Underwater Vehicle)が利用されている(例えば下記特許文献1)。また、航空調査、輸送、偵察等を行うために、無人航空機(UAV:Unmanned Aerial Vehicle)が利用されている。以下、AUV(UUV)やUAVのように無人で3次元運動をする移動体を「自律航走体」とよぶ。かかる自律航走体の3次元的な運動を監視するため、従来では、自律航走体の姿勢・推進力・速度や、位置・移動軌跡を平面ディスプレイ上に表示している。
【0003】
自律航走体の姿勢・推進力・速度の表示に関しては、航走体の前後軸をX軸、左右軸をY軸、上下軸をZ軸とするXYZ直交座標系を定義し、ロール角(X軸周りの回転角)・ピッチ角(Y軸周りの回転角)・ヨー角(Z軸周りの回転角)、各スラスタ推力(前後スラスタ推力、左右スラスタ推力、上下スラスタ推力)、X軸、Y軸、Z軸ごとの速度等を個別に平面ディスプレイ上に表示している。
自律航走体の位置・移動軌跡の表示に関しては、三面図に投影した軌跡を平面ディスプレイ上にL字型の配置で表示する、もしくは任意の向きから投影した軌跡を平面ディスプレイに表示している。
【0004】
なお、自律航走体の運動を監視するものではないが、下記特許文献2には、生体内にある被検体の静的構造を容易に視認可能にするために、3枚の平面ディスプレイを立方体の隣接する3面を構成するように互いに直交に配置した医用マルチディスプレイが開示されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2007−210402号公報
【特許文献2】特開2008−257082号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
自律航走体の姿勢・推進力・速度を平面ディスプレイ上に個別に表示する従来技術では、三次元空間の中で、航走体がどの方向を向いていて、どの向きにどのくらいの推進力で、どの方向に進んでいるかを直観的にすばやく正確に把握することが難しい。
【0007】
自律航走体の位置・移動軌跡を平面ディスプレイ上にL字型の配置で表示する従来技術では、三面図が同一平面上に配置されているため、三面図の読図に慣れていないと、直観的にすばやく正確に把握することが難しい。また、平面ディスプレイ上に斜めからの投影図で表示する方法もあるが、3次元の情報を2次元平面上に表示しているために、左右方向に移動しているのか、上下方向に移動しているのかが曖昧になる場合がある。
【0008】
また、特許文献2の技術は、生体内にある被検体の3次元構造を表示することを目的としており、自律航走体の運動状態を表示することについては何ら考慮されていない。したがって、自律航走体の運動状態を直観的にすばやく正確に把握できる技術が求められる。
【0009】
本発明は、上記の問題に鑑みてなされたものであり、自律航走体の運動状態を直観的にすばやく正確に把握できる自律航走体運動モニタ用ディスプレイ装置を提供することを課題とする。
【課題を解決するための手段】
【0010】
上記の問題を解決するため、本発明の自律航走体運動モニタ用ディスプレイ装置は、以下の技術的手段を採用する。
(1)本発明の自律航走体運動モニタ用ディスプレイ装置は、直方体における隣接する3面を構成するように互いに直交して配置された第1平面ディスプレイ、第2平面ディスプレイ及び第3平面ディスプレイを有し、時間的に変化する自律航走体の運動状態を、前記第1平面ディスプレイの表示面を上に向けて水平配置されたマルチディスプレイの、異なる3面への投影によって3次元的に把握できるように前記面毎に図を生成し、生成した各図を、前記第1平面ディスプレイ、前記第2平面ディスプレイ及び前記第3平面ディスプレイに個別に表示させる処理装置と、を備えることを特徴とする。
【0011】
上記の本発明の構成によれば、第1平面ディスプレイ、第2平面ディスプレイ及び第3平面ディスプレイによって、直方体における隣接する3面を構成する形で、マルチディスプレイが構成され、自律航走体の時間的に変化する運動状態が、異なる3面に投影した図として各ディスプレイ上に表示されるので、自律航走体の3次元内での運動の様子を直観的にすばやく正確に把握できる。
【0012】
(2)また、上記の自律航走体運動モニタ用ディスプレイ装置において、前記自律航走体の前後軸をX軸、左右軸をY軸、上下軸をX軸とする直交座標系を定義したとき、前記処理装置は、前記自律航走体の前後軸の東西南北に対する方位を示す情報を前記第1平面ディスプレイに表示させ、前記自律航走体のXZ平面における姿勢を示す情報を前記第2平面ディスプレイに表示させ、前記自律航走体のYZ平面における姿勢を示す情報を前記第3平面ディスプレイに表示させる。
【0013】
このような第1実施形態によれば、自律航走体がどの方位に向いているかが第1平面ディスプレイに表示されるので、自律航走体の向きを容易に把握できる。また、自律航走体のXZ平面における姿勢が第2平面ディスプレイに表示されるので、自律航走体のピッチ角を容易に把握できる。また、また、自律航走体のYZ平面における姿勢が第3平面ディスプレイに表示されるので、自律航走体のロール角を容易に把握できる。したがって、本発明の第1実施形態によれば、時間的に変化する自律航走体の3次元内の姿勢を直観的にすばやく正確に把握できる。
【0014】
(3)また、上記の自律航走体運動モニタ用ディスプレイ装置において、前記処理装置は、前記自律航走体の実際の東西南北に対する方位と、前記第1平面ディスプレイに表示される自律航走体の向きが同じになるように、前記第1平面ディスプレイに画像を表示させる。
【0015】
上記の構成によれば、第1平面ディスプレイには、自律航走体の実際の東西南北に対する方位と同じ向きになるように自律航走体の前後軸の方向が表示されるので、ディスプレイ装置が設置されている場所(例えば車両や船舶などの乗り物)あるいは自律航走体が方向転換しても、実際の自律航走体の向きを容易に把握できる。
【0016】
(4)また、上記の自律航走体運動モニタ用ディスプレイ装置において、さらに、前記マルチディスプレイを鉛直軸周りに回転させるように駆動する旋回装置を備え、前記マルチディスプレイは、前記第1平面ディスプレイ、前記第2平面ディスプレイ及び前記第3平面ディスプレイで構成される直方体において前記第2平面ディスプレイに対面する面に配置された第4平面ディスプレイと、前記直方体において前記第3平面ディスプレイに対面する面に配置された第5平面ディスプレイとを有し、前記処理装置は、a)前記自律航走体のXZ平面における姿勢を示す情報を前記第4平面ディスプレイに表示させ、b)前記自律航走体のYZ平面における姿勢を示す情報を前記第5平面ディスプレイに表示させ、c)前記自律航走体の実際の向きと、前記第1平面ディスプレイに表示される自律航走体の向きが同じになるように、前記旋回装置を制御する。
【0017】
上記の構成によれば、マルチディスプレイが実際の自律航走体の向きに合わせて回転するので、ディスプレイ装置が設置されている場所(例えば車両や船舶などの乗り物)あるいは自律航走体が方向転換しても、実際の自律航走体の向きを容易に把握できる。
また、さらに第4平面ディスプレイと第5平面ディスプレイを備えることで、マルチディスプレイが回転しても、自律航走体のXZ平面における姿勢とYZ平面における姿勢を容易に把握できる。
また、第1〜第5平面ディスプレイが一体となって回転するので、第1平面ディスプレイに表示される自律航走体の向きと、第2〜第5平面ディスプレイに表示される自律航走体の向きが整合するので、自律航走体の向きを一層容易に把握できる。
【0018】
(5)また、上記の自律航走体運動モニタ用ディスプレイ装置において、前記処理装置は、前記自律航走体のXY平面における移動方向とその速度を示す情報を前記第1平面ディスプレイに表示させ、前記自律航走体のXZ平面における移動方向とその速度を示す情報を前記第2平面ディスプレイに表示させ、前記自律航走体のYZ平面における移動方向とその速度を示す情報を前記第3平面ディスプレイに表示させる。
【0019】
上記の構成によれば、各ディスプレイ上に、各面に対応した移動方向とその速度を示す情報が表示されるので、3次元空間における自律航走体の移動方向と速度を容易に把握できる。
【0020】
(6)また、上記の自律航走体運動モニタ用ディスプレイ装置において、前記処理装置は、前記自律航走体の前後スラスタ推力を示す情報と、前記自律航走体の左右スラスタ推力を示す情報を前記第1平面ディスプレイに表示させ、前記自律航走体の前後スラスタ推力を示す情報と、前記自律航走体の上下スラスタ推力を示す情報を前記第2平面ディスプレイに表示させ、前記自律航走体の左右スラスタ推力を示す情報と、前記自律航走体の上下スラスタ推力を示す情報を前記第3平面ディスプレイに表示させる。また、各平面ディスプレイに垂直な軸周りの回転モーメントを各平面ディスプレイ表示しても良い。
【0021】
上記の構成によれば、各ディスプレイ上に、各面に対応したスラスタ推力・モーメントを示す情報が表示されるので、3次元空間における自律航走体のスラスタ推力・モーメントを容易に把握できる。
【0022】
(7)また、上記の自律航走体運動モニタ用ディスプレイ装置において、前記処理装置は、前記自律航走体の位置及び移動軌跡を、直交する3面に投影した画像として、前記第1平面ディスプレイ、前記第2平面ディスプレイ及び前記第3平面ディスプレイに表示させる。
【0023】
このような第3実施形態によれば、自律航走体の位置及び移動軌跡が直交する3面に投影した形で、各ディスプレイ上に表示されるので、時間的に変化する自律航走体の位置・移動軌跡を直観的にすばやく正確に把握できる。
【0024】
(8)また、上記の自律航走体運動モニタ用ディスプレイ装置において、前記処理装置は、前記自律航走体の実際の移動軌跡の向きと、前記マルチディスプレイに表示される移動軌跡の向きが同じになるように、前記マルチディスプレイに画像を表示させる。
【0025】
上記の構成によれば、自律航走体の実際の移動軌跡の方向と、マルチディスプレイに表示される移動軌跡の方向が一致するので、ディスプレイ装置が設置されている場所(例えば車両や船舶などの乗り物)あるいは自律航走体が方向転換しても、実際の自律航走体の移動軌跡を容易に把握できる。
【0026】
(9)また、上記の自律航走体運動モニタ用ディスプレイ装置において、さらに、前記マルチディスプレイを、鉛直軸周りに回転自在に支持、あるいは鉛直軸周りに回転させるように駆動する旋回機構を備え、前記マルチディスプレイは、前記第1平面ディスプレイ、前記第2平面ディスプレイ及び前記第3平面ディスプレイで構成される直方体において前記第2平面ディスプレイに対面する面に配置された第4平面ディスプレイと、前記直方体において前記第3平面ディスプレイに対面する面に配置された第5平面ディスプレイとを有し、前記処理装置は、a)互いに直交する5投影面のうち前記第2平面ディスプレイに対応する鉛直面と平行な鉛直面に対して前記自律航走体の位置及び移動軌跡を投影した画像を前記第4平面ディスプレイに表示させ、b)互いに直交する5投影面のうち前記第3平面ディスプレイに対応する鉛直面と平行な鉛直面に対して前記自律航走体の位置及び移動軌跡を投影した画像を前記第5平面ディスプレイに表示させる。
【0027】
上記の構成によれば、マルチディスプレイを回転させることで第2〜第5ディスプレイに表示される投影画像が変化するので、確認したいポイントの軌跡をすばやく正確に把握することができる。
【0028】
(10)また、上記の自律航走体運動モニタ用ディスプレイ装置において、前記処理装置は、前記自律航走体のウェイポイントを、前記第1平面ディスプレイ、前記第2平面ディスプレイ及び前記第3平面ディスプレイに表示させる。
【0029】
上記の構成によれば、各ディスプレイ上に、各面に対応したウェイポイントを示す情報が表示されるので、3次元空間における自律航走体のウェイポイントを容易に把握できる。
【0030】
(11)また、上記の自律航走体運動モニタ用ディスプレイ装置において、前記処理装置は、前記第1平面ディスプレイ、前記第2平面ディスプレイ及び前記第3平面ディスプレイに、各移動軌跡間の対応点を表示させる。
【0031】
上記の構成によれば、各平面ディスプレイに表示される移動軌跡の、平面ディスプレイ間における対応点が表示されるので、各平面ディスプレイ間の対応関係の把握が容易となる。
【発明の効果】
【0032】
本発明の自律航走体運動モニタ用ディスプレイ装置によれば、自律航走体の運動予定経路及び運動状態を直観的にすばやく正確に把握できる。
【図面の簡単な説明】
【0033】
【図1】本発明の自律航走体運動モニタ用ディスプレイ装置を用いたモニタリングシステムの概要を示す図である。
【図2】本発明の自律航走体運動モニタ用ディスプレイ装置の第1実施形態を示す図である。
【図3A】本発明の自律航走体運動モニタ用ディスプレイ装置の第2実施形態を示す図である。
【図3B】本発明の自律航走体運動モニタ用ディスプレイ装置の第2実施形態の示す別の図である。
【図4】本発明の自律航走体運動モニタ用ディスプレイ装置の第3実施形態を示す図である。
【図5】本発明の自律航走体運動モニタ用ディスプレイ装置の第4実施形態を示す図である。
【発明を実施するための形態】
【0034】
以下、本発明の好ましい実施形態を添付図面に基づいて詳細に説明する。なお、各図において共通する部分には同一の符号を付し、重複した説明を省略する。
【0035】
図1は、本発明の自律航走体運動モニタ用ディスプレイ装置10を用いたモニタリングシステムの概要を示す図である。以下、自律航走体運動モニタ用ディスプレイ装置を、単に「ディスプレイ装置」という。
【0036】
図1において、自律航走体1は、自律型無人潜水機(AUV)1Aであり、自律型無人潜水機1Aは水中を航行している。ただし、本発明において、モニタリングの対象となる自律航走体1は、AUVに限られず、無人航空機(UAV)であってもよい。
【0037】
自律航走体1は、電力源である電池4と、自律航走体1の行動及び作動を制御する航行制御装置3と、自律航走体1の位置を算出する慣性航法装置2と、前進する推力を発生させる前後スラスタ5と、上下方向の推力を発生させる上下スラスタ7と、左右方向の推力を発生させる左右スラスタ6と、通信信号の送受信を行う航走体側通信機8aとを備える。
【0038】
慣性航法装置2は、仮想の固定座標上における自己位置を運動履歴により随時算出する装置である。具体的には、慣性航法装置2は、三次元の速度変化を検出する装置(加速度計、速度計など)と、姿勢変化を検出する装置(ジャイロ、方位計、姿勢計など)とを備えたものであり、出発点からの速度や姿勢変化を累積的に計算する慣性航法により固定座標における自己位置を把握できる構成となっている。
【0039】
航行制御装置3は、慣性航法装置2によって随時算出される自己位置及び姿勢の情報を使用し、予め設定された行動パターンに従って自律航走体1が動作するように、各スラスタ5、6、7を制御する。
【0040】
航走体側通信機8aは、慣性航法装置2によって随時算出される自己位置、姿勢、移動方向とその速度、航行制御装置3によって算出される各スラスタ5、6、7の推力の情報等を、船舶9に向けて送信する。図1において、航走体側通信機8aは、音波信号を送受信する機能を有する音響伝送用送受波器として構成されている。
【0041】
水上には船舶9が浮遊している。この船舶9には、本発明のディスプレイ装置10が設置されている。なおディスプレイ装置10は、陸上施設、あるいは車両などの陸上を移動可能な乗り物及び空中を移動可能な乗り物に設置されてもよい。
【0042】
また船舶9には、通信信号の送受信を行うためのモニタ側通信機8bが設けられている。このモニタ側通信機8bで受信した信号は、ディスプレイ装置10に送信されるようになっている。図1において、モニタ側通信機8bは、音波信号を送受信する機能を有する音響伝送用送受波器として構成されている。したがって、航走体側通信機8aとモニタ側通信機8bとによって双方向通信が可能な通信装置が構成されている。
【0043】
図2は、本発明のディスプレイ装置10の第1実施形態を示す図である。図2に示すように、ディスプレイ装置10は、マルチディスプレイ12と処理装置30とを備える。
【0044】
本発明の第1実施形態において、マルチディスプレイ12は、直方体における隣接する3面を構成するように互いに直交して配置された第1平面ディスプレイ13、第2平面ディスプレイ14及び第3平面ディスプレイ15を有しており、第1平面ディスプレイ13は表示面を上に向けて水平配置されている。
【0045】
平面ディスプレイには、液晶ディスプレイ、プラズマディプレイ、有機ELディスプレイ、電界効果ディスプレイなどがあり、上述の第1〜第3平面ディスプレイ13〜15としては、どのような種類の平面ディスプレイも適用可能である。また、第1〜第3平面ディスプレイ13〜15は、長方形、正方形のいずれでもよい。
【0046】
処理装置30は、時間的に変化する自律航走体1の運動状態を、異なる3面への投影によって3次元的に把握できるように面毎に図を生成し、生成した各図を、第1平面ディスプレイ13、第2平面ディスプレイ14及び第3平面ディスプレイ15に個別に表示させる機能を有する。
【0047】
第1実施形態において、処理装置30は、自律航走体1から送信されてきた自律航走体1の姿勢、移動方向とその速度、及び各スラスタの推力の情報を使用し、以下の処理を行うように構成されている。
ここで、自律航走体1の前後軸をX軸(前がプラス)、左右軸をY軸(右がプラス)、上下軸をZ軸(下がプラス)とするXYZ直交座標系を定義する。
【0048】
処理装置30は、自律航走体1の前後軸の東西南北に対する方位を示す情報を第1平面ディスプレイ13に表示させる。図2に示す構成では、第1平面ディスプレイ13に、真北方向を示すマーク18とともに、自律航走体1を表現した絵20aが表示されている。このマーク18は、実際の真北方向を指している。したがって、船舶9などの、ディスプレイ装置10が搭載された乗り物が向きを変えた場合には、第1平面ディスプレイ13に表示されたマーク18は、真北方向を指すように第1平面ディスプレイ13上で回転して、向きを変える。
【0049】
処理装置30は、自律航走体1の実際の東西南北に対する方位と、第1平面ディスプレイ13に表示される自律航走体1の絵20aの向きが同じになるように、第1平面ディスプレイ13に画像を表示させるように構成されている。したがって、水中の自律航走体1が向きを変えた場合には、第1平面ディスプレイ13に表示された自律航走体1の絵20aも、実際の自律航走体1の向きと一致するように、第1平面ディスプレイ13上で回転して、向きを変える。例えば、図2において、第1平面ディスプレイ13上に破線で示すように、自律航走体1の絵20aが向きを変える。
【0050】
上述のように、真北方向を示すマーク18と、実際の自律航走体1の向きと同じ向きの絵20aが第1平面ディスプレイ13に表示されるので、第1平面ディスプレイ13を見ることにより、実際の自律航走体1の向きと真北に対する方位角度を容易に把握できる。なお、自律航走体1の向きについては、絵20aに加えて、文字や数字によって表現したものを第1平面ディスプレイ13に併せて表示してもよい。
【0051】
処理装置30は、自律航走体1のXZ平面における姿勢を示す情報を第2平面ディスプレイ14に表示させる。図2に示す構成では、第2平面ディスプレイ14に、XZ平面に投影した自律航走体1を表現した絵20bが表示されている。自律航走体1の絵20bは、図2では、自律航走体1を左側から見た絵となっているが、右側から見た絵でもよい。またこの絵20bには、自律航走体1の前後軸も表現されている。この前後軸は、図2では、第2平面ディスプレイ14の画面上に一点鎖線で表現されている。
【0052】
したがって、第2平面ディスプレイ14を見ることにより、実際の自律航走体1のピッチ角(Y軸周りの回転角)を容易に把握できる。なお、自律航走体1のXZ平面における姿勢については、絵20bに加えて、文字や数字によってピッチ角を表現したものを第2平面ディスプレイ14に併せて表示してもよい。
【0053】
処理装置30は、自律航走体1のYZ平面における姿勢を示す情報を第3平面ディスプレイ15に表示させる。図2に示す構成では、第3平面ディスプレイ15に、YZ平面に投影した自律航走体1を表現した絵20cが表示されている。自律航走体1の絵20cは、図2では、自律航走体1を後ろから見た絵となっているが、前から見た絵でもよい。またこの絵20cには自律航走体1の上下軸と左右軸も表現されている。この上下軸と左右軸は、図2では、第3平面ディスプレイ15の画面上に一点鎖線で表現されている。
【0054】
したがって、第3平面ディスプレイ15を見ることにより、実際の自律航走体1のロール角(X軸周りの回転角)を容易に把握できる。なお、自律航走体1のYZ平面における姿勢については、絵20cに加えて、文字や数字によってロール角を表現したものを第3平面ディスプレイ15に併せて表示してもよい。
【0055】
処理装置30は、図2に示すように、自律航走体1のXY平面における移動方向とその速度を示す情報を第1平面ディスプレイ13に表示させてもよい。図2に示す構成では、自律航走体1のXY平面における移動方向とその速度は、白抜きのベクトル22aで表現されている。なお、この場合、自律航走体1のXY平面における移動方向とその速度については、白抜きのベクトル22aに加えて、文字や数字によって表現したものを第1平面ディスプレイ13に併せて表示してもよい。
【0056】
処理装置30は、図2に示すように、自律航走体1の前後スラスタ推力を示す情報と、自律航走体1の左右スラスタ推力を示す情報を第1平面ディスプレイ13に表示させてもよい。図2に示す構成では、自律航走体1の前後スラスタ推力はベクトル24で表現され、左右スラスタ推力は、ベクトル25で表現されている。なお、この場合、自律航走体1の前後スラスタ推力と左右スラスタ推力については、ベクトル24、25に加えて、文字や数字によって表現したものを第1平面ディスプレイ13に併せて表示してもよい。
【0057】
処理装置30は、図2に示すように、自律航走体1のXZ平面における移動方向とその速度を示す情報を第2平面ディスプレイ14に表示させてもよい。図2に示す構成では、自律航走体1のXZ平面における移動方向とその速度は、白抜きのベクトル22bで表現されている。なお、この場合、自律航走体1のXZ平面における移動方向とその速度については、白抜きのベクトル22bに加えて、文字や数字によって表現したものを第2平面ディスプレイ14に併せて表示してもよい。
【0058】
処理装置30は、図2に示すように、自律航走体1の前後スラスタ推力を示す情報と、自律航走体1の上下スラスタ推力を示す情報を第2平面ディスプレイ14に表示させてもよい。図2に示す構成では、自律航走体1の前後スラスタ推力は、第1平面ディスプレイ13のそれと同様に、ベクトル24で表現され、上下スラスタ推力はベクトル26で表現されている。なお、この場合、自律航走体1の前後スラスタ推力と上下スラスタ推力については、ベクトル24、26に加えて、文字や数字によって表現したものを第2平面ディスプレイ14に併せて表示してもよい。
【0059】
処理装置30は、図2に示すように、自律航走体1のYZ平面における移動方向とその速度を示す情報を第3平面ディスプレイ15に表示させてもよい。図2に示す構成では、自律航走体1のYZ平面における移動方向とその速度は、白抜きのベクトル22cで表現されている。なお、この場合、自律航走体1のYZ平面における移動方向とその速度については、白抜きのベクトル22cに加えて、文字や数字によって表現したものを第3平面ディスプレイ15に併せて表示してもよい。
処理装置30は、図2には示していないが、自律航走体1の左右スラスタ推力を示す情報と、自律航走体1の上下スラスタ推力を示す情報を第3平面ディスプレイ15に表示させてもよい。なお、この場合、自律航走体1の左右スラスタ推力と上下スラスタ推力については、ベクトルでの表示に加えて、文字や数字によって表現したものを第3平面ディスプレイ15に併せて表示してもよい。
【0060】
上述した本発明の第1実施形態によれば、自律航走体1がどの方位に向いているかが第1平面ディスプレイ13に表示されるので、自律航走体1の向きを容易に把握できる。また、自律航走体1のXZ平面における姿勢が第2平面ディスプレイ14に表示されるので、自律航走体1のピッチ角を容易に把握できる。また、また、自律航走体1のYZ平面における姿勢が第3平面ディスプレイ15に表示されるので、自律航走体1のロール角を容易に把握できる。したがって、本発明の第1実施形態によれば、時間的に変化する自律航走体1の3次元内の姿勢を直観的にすばやく正確に把握できる。
【0061】
また、第1平面ディスプレイ13には、自律航走体1の実際の東西南北に対する方位と同じ向きになるように自律航走体1の前後軸の方向が表示されるので、ディスプレイ装置10が設置されている場所(例えば車両や船舶などの乗り物)あるいは自律航走体1が方向転換しても、実際の自律航走体1の向きを容易に把握できる。
【0062】
また、各平面ディスプレイ13〜15の画面上に、各面に対応した移動方向とその速度を示す情報として、ベクトル22a〜22cが表示されるので、3次元空間における自律航走体1の移動方向と速度を容易に把握できる。
また、各平面ディスプレイ13〜15の画面上に、各面に対応したスラスタ推力を示す情報として、ベクトル24〜26が表示されるので、3次元空間における自律航走体1のスラスタ推力を容易に把握できる。
【0063】
図3A及び図3Bは、本発明のディスプレイ装置10の第2実施形態を示す図である。図3A及び図3Bに示すように、本発明のディスプレイ装置10の第2実施形態は、さらに、マルチディスプレイ12を鉛直軸周りに回転させるように駆動する旋回装置28を備える。旋回装置28の駆動源としては、電動回転モータを用いることができる。図3Bは、図3Aに示す状態から、旋回装置28によりマルチディスプレイ12を時計回りに180度回転させた状態を示している。
【0064】
処理装置30は、自律航走体1の前後軸の東西南北に対する方位を示す情報として、第1実施形態と同様に、第1平面ディスプレイ13に、真北方向を示すマーク18とともに、自律航走体1を表現した絵20aを表示させる。このマーク18は、実際の真北方向を指している。したがって、マルチディスプレイ12が向きを変えた場合には、第1平面ディスプレイ13に表示されたマーク18は、真北方向を指すように第1平面ディスプレイ13上で回転して、向きを変える。
【0065】
第2実施形態では、自律航走体1が実際に向きを変えても、第1平面ディスプレイ13の画面に対する絵20aの向きは変わらず、固定されている。代わりに、処理装置30は、自律航走体1の実際の向きと、第1平面ディスプレイ13に表示される自律航走体1の絵20aの向きが同じになるように、旋回装置28を制御する。したがって、水中の自律航走体1が向きを変えた場合には、第1平面ディスプレイ13の画面に対する絵20aの向きは変わらないが、実際の自律航走体1の向きと第1平面ディスプレイ13に表示された絵20aの向きが一致するように、処理装置30による制御のもと、マルチディスプレイ12が旋回装置28によって回転させられる。
【0066】
図3Aに示すように、処理装置30は、自律航走体1を左側から見たときの自律航走体1のXZ平面における姿勢を示す情報を第2平面ディスプレイ14に表示させる。第2平面ディスプレイ14に表示されるものは、第1実施形態と同様に、自律航走体1を表現した絵20b、自律航走体1の移動方向とその速度を示すベクトル22b、前後スラスタ推力と上下スラスタ推力を示すベクトル24、26でよい。
【0067】
図3Aに示すように、処理装置30は、自律航走体1を後ろから見たときの自律航走体1のYZ平面における姿勢を示す情報を第3平面ディスプレイ15に表示させる。第3平面ディスプレイ15に表示されるものは、第1実施形態と同様に、自律航走体1を表現した絵20c、自律航走体1の移動方向とその速度を示すベクトル22でよい。図中には示していないが、左右スラスタ推力と上下スラスタ推力のベクトルでの表示を加えてもよい。
【0068】
図3Bに示すように、マルチディスプレイ12は、さらに、第1平面ディスプレイ13、第2平面ディスプレイ14及び第3平面ディスプレイ15で構成される直方体において第2平面ディスプレイ14に対面する面に配置された第4平面ディスプレイ16と、前記直方体において第3平面ディスプレイ15に対面する面に配置された第5平面ディスプレイ17とを有している。第4平面ディスプレイ16と第5平面ディスプレイ17は、長方形、正方形のいずれでもよい。
【0069】
処理装置30は、自律航走体1を右側から見たときの自律航走体1のXZ平面における姿勢を示す情報を第4平面ディスプレイ16に表示させる。図3Bに示す構成では、右側面側からXZ平面に投影した自律航走体1を表現した絵20dが表示されている。処理装置30は、第2平面ディスプレイ14の表示と同様に、自律航走体1の移動方向とその速度を示すベクトル22bと、前後スラスタ推力及び上下スラスタ推力を示すベクトル24、26を第4平面ディスプレイ16に表示させてもよい。
【0070】
処理装置30は、自律航走体1を前から見たときの自律航走体1のYZ平面における姿勢を示す情報を第5平面ディスプレイ17に表示させる。図3Bに示す構成では、YZ平面に投影した自律航走体1を表現した絵20eが表示されている。処理装置30は、第3平面ディスプレイ15の表示と同様に、自律航走体1の移動方向とその速度を示すベクトル22cを第5平面ディスプレイ17に表示させてもよい。
処理装置30は、図3Bには示していないが、自律航走体1の左右スラスタ推力を示す情報と、自律航走体1の上下スラスタ推力を示す情報を第5平面ディスプレイ17に表示させてもよい。
【0071】
上述した本発明の第2実施形態によれば、自律航走体1がどの方位に向いているかが第1平面ディスプレイ13に表示されるので、自律航走体1の向きを容易に把握できる。また、自律航走体1のXZ平面における姿勢が第2平面ディスプレイ14と第4平面ディスプレイ16に表示されるので、自律航走体1のピッチ角を容易に把握できる。また、自律航走体1のYZ平面における姿勢が第3平面ディスプレイ15と第5平面ディスプレイ17に表示されるので、自律航走体1のロール角を容易に把握できる。したがって、本発明の第2実施形態によれば、時間的に変化する自律航走体1の3次元内の姿勢を直観的にすばやく正確に把握できる。
【0072】
また、マルチディスプレイ12が実際の自律航走体1の向きに合わせて回転するので、ディスプレイ装置10が設置されている場所(例えば車両や船舶などの乗り物)あるいは自律航走体1が方向転換しても、実際の自律航走体1の向きを容易に把握できる。
また、第1〜第3平面ディスプレイ13〜15に加えて、第4平面ディスプレイ16と第5平面ディスプレイ17を備えることで、マルチディスプレイ12が回転しても、自律航走体1のXZ平面における姿勢とYZ平面における姿勢を容易に把握できる。
【0073】
また、第1〜第5平面ディスプレイ13〜17が一体となって回転するので、第1平面ディスプレイ13に表示される自律航走体1の向きと、第2〜第5平面ディスプレイ14〜17に表示される自律航走体1の絵20b〜20eの向きが整合するので、自律航走体1の向きを一層容易に把握できる。
【0074】
図4は、本発明のディスプレイ装置10の第3実施形態を示す図である。
本発明の第3実施形態において、マルチディスプレイ12は、第1実施形態と同様に、直方体における隣接する3面を構成するように互いに直交して配置された第1平面ディスプレイ13、第2平面ディスプレイ14および第3平面ディスプレイ15を備える。
【0075】
処理装置30は、東西南北の方位を示すマーク18を第1平面ディスプレイ13に表示させる。このマーク18は、実際の真北方向を指すようにしてもよいし、任意に仮想的に設定した真北方向を指すようにしてもよい。実際の真北方向を指すようにマーク18を表示させた場合、船舶などの、ディスプレイ装置10が搭載された乗り物が向きを変えた場合には、第1平面ディスプレイ13に表示されたマーク18は、真北方向を指すように第1平面ディスプレイ13上で回転して、向きを変える。
【0076】
時間的に変化する自律航走体1の運動状態を示す情報として、上述した第1実施形態と第2実施形態では、自律航走体1の姿勢や移動方向をマルチディスプレイ12に表示させたが、第3実施形態では、自律航走体1の位置及び移動軌跡をマルチディスプレイ12に表示させる。具体的には、処理装置30は、自律航走体1の位置及び移動軌跡を、直交する3面に投影した画像として、第1平面ディスプレイ13、第2平面ディスプレイ14及び第3平面ディスプレイ15に表示させる。
【0077】
処理装置30は、互いに直交する5投影面のうち水平面に対して自律航走体1の位置及び移動軌跡を投影した画像を第1平面ディスプレイ13に表示させ、互いに直交する5投影面のうち一つの鉛直面(これを第1鉛直面とよぶ)に対して自律航走体1の位置及び移動軌跡を投影した画像を第2平面ディスプレイ14に表示させ、互いに直交する5投影面のうち水平面及び第1鉛直面に直交する鉛直面に対して自律航走体1の位置及び移動軌跡を投影した画像を第3平面ディスプレイ15に表示させる。
【0078】
自律航走体1の位置は、図4の構成では、第1〜第3平面ディスプレイ13〜15の画面上では矢印31で表現されている。また、自律航走体1の移動軌跡は、図4の構成では、第1〜第3平面ディスプレイ13〜15の画面上で実線のライン32a、32b、32cで表現されている。
【0079】
処理装置30は、実際の真北方向を指すようにマーク18を表示させた場合、自律航走体1の実際の移動軌跡の向きと、マルチディスプレイ12装置10に表示される移動軌跡の向きが同じになるように、マルチディスプレイ12に画像を表示させる。これにより、実際の自律航走体1の移動軌跡の向きを容易に把握できる。
あるいは、処理装置30は、第1平面ディスプレイ13の画面上の真北方向を任意の方向に回転させ、第2平面ディスプレイ14と第3平面ディスプレイ15に表示させる投影面を変化させてもよい。このようにすると、確認したい軌跡の近傍の把握を容易にできる。
【0080】
処理装置30は、自律航走体1のウェイポイントを、第1平面ディスプレイ13、第2平面ディスプレイ14及び第3平面ディスプレイ15に表示させてもよい。図4に示す構成では、ウェイポイントは、“*”の記号36と、“*”を白抜きの丸で囲んだ記号37で表現されている。このうち、“*”の記号36は、過去のウェイポイント、つまり予定されていた通過点を示している。また、“*”を白抜きの丸で囲んだ記号37は、現在向かっているウェイポイント、つまり現在目標としている通過点あるいは到達点を示している。
現在位置に対して過去のウェイポイント表示数、これから向うウェイポイント表示数を設定できるようにし、設定された数のウェイポイントを表示してもよい。
【0081】
処理装置30は、第1平面ディスプレイ13、第2平面ディスプレイ14及び第3平面ディスプレイ15に、各移動軌跡間の対応点34a、34b、34cを表示させてもよい。対応点を複数設定する場合、移動軌跡上の異なる位置における各対応点を視覚的に区別できるように、対応点を表示させるのがよい。図4に示す構成では、異なる対応点が、白抜きの丸、黒塗りの丸、白抜きの四角で表現されている。なお、色や大きさで複数の異なる対応点を視覚的に区別できるようにしてもよい。
また、表示されている全体の移動軌跡上を対応点が周期的に移動するようにして、対応するポイントがわかるようにしてもよい。
【0082】
上述した本発明の第3実施形態によれば、自律航走体1の位置及び移動軌跡が、直交する3面に投影した形で、各平面ディスプレイ13〜15上に表示されるので、時間的に変化する自律航走体1の位置・移動軌跡を直観的にすばやく正確に把握できる。
【0083】
また、自律航走体1の実際の移動軌跡の方向と、マルチディスプレイ12に表示される移動軌跡の方向が一致するように、マルチディスプレイ12に移動軌跡を表示させれば、ディスプレイ装置10が設置されている場所(例えば車両や船舶などの乗り物)あるいは自律航走体1が方向転換しても、実際の自律航走体1の移動軌跡を容易に把握できる。
【0084】
また、各平面ディスプレイ13〜15の画面上に、各面に対応したウェイポイントを示す情報が表示されるので、3次元空間における自律航走体1のウェイポイントを容易に把握できる。
また、各平面ディスプレイ13〜15の画面上に表示される移動軌跡の、各平面ディスプレイ間における対応点が表示されるので、各平面ディスプレイ間の対応関係の把握が容易となる。
【0085】
図5は、本発明のディスプレイ装置10の第4実施形態を示す図である。
本発明のディスプレイ装置10の第4実施形態において、マルチディスプレイ12は、第2実施形態と同様に、直方体における隣接する3面を構成するように互いに直交して配置された第1平面ディスプレイ13、第2平面ディスプレイ14及び第3平面ディスプレイ15を備え、さらに、第1平面ディスプレイ13、第2平面ディスプレイ14及び第3平面ディスプレイ15で構成される直方体において第2平面ディスプレイ14に対面する面に配置された第4平面ディスプレイ16と、前記直方体において第3平面ディスプレイ15に対面する面に配置された第5平面ディスプレイ17とを有している。第4平面ディスプレイ16と第5平面ディスプレイ17は、長方形、正方形のいずれでもよい。
【0086】
ディスプレイ装置10は、さらに、旋回機構29を備える。旋回機構29は、2面のディスプレイ平面に平行してマルチディスプレイ中心を通る軸を軸とする鉛直軸周りに回転自在に支持するもの、つまり手動で回転できるものでも、電動回転モータのような駆動源によりマルチディスプレイ12を鉛直軸周りに回転させるように駆動するものでもよい。
【0087】
処理装置30は、東西南北の方位を示すマーク18を第1平面ディスプレイ13に表示させる。このマーク18は、実際の真北方向を指すように表示される。したがって、船舶などの、ディスプレイ装置10が搭載された乗り物が向きを変えた場合には、第1平面ディスプレイ13に表示されたマーク18は、真北方向を指すように第1平面ディスプレイ13上で回転して、向きを変える。
【0088】
処理装置30は、自律航走体1の位置及び移動軌跡を、直交する5面に投影した画像として、第1〜第5平面ディスプレイ13〜17に表示させる。具体的には、処理装置30は、第1〜第5平面ディスプレイ13〜17に少なくとも以下の事項を表示させる。
【0089】
a)処理装置30は、互いに直交する5投影面のうち水平面に対して自律航走体1の位置及び移動軌跡を投影した画像を第1平面ディスプレイ13に表示させる。
b)処理装置30は、互いに直交する5投影面のうち一つの鉛直面(これを第1鉛直面とよぶ)に対して自律航走体1の位置及び移動軌跡を投影した画像を第2平面ディスプレイ14に表示させる。
c)処理装置30は、互いに直交する5投影面のうち水平面及び第1鉛直面に直交する鉛直面(これを第2鉛直面とよぶ)に対して自律航走体1の位置及び移動軌跡を投影した画像を第3平面ディスプレイ15に表示させる。
d)処理装置30は、互いに直交する5投影面のうち第2平面ディスプレイ14に対応する面(第1鉛直面)と平行な鉛直面に対して自律航走体1の位置及び移動軌跡を投影した画像を第4平面ディスプレイ16に表示させる。
e)処理装置30は、互いに直交する5投影面のうち第3平面ディスプレイ15に対応する面(第2鉛直面)と平行な鉛直面に対して自律航走体1の位置及び移動軌跡を投影した画像を第5平面ディスプレイ17に表示させる。
【0090】
自律航走体1の位置は、図4の構成では、第3実施形態と同様に、第1〜第5平面ディスプレイ13〜17の画面上で白抜きの矢印31で表現されている。また、自律航走体1の移動軌跡は、図4の構成では、第3実施形態と同様に、第1〜第5平面ディスプレイ17の画面上に実線のライン32a、32b、32cで表現されている。
【0091】
処理装置30は、自律航走体1の実際の移動軌跡の向きと、マルチディスプレイ12装置10に表示される移動軌跡の向きが同じになるように、マルチディスプレイ12に画像を表示させる。これにより、実際の自律航走体1の移動軌跡の向きを容易に把握できる。
【0092】
処理装置30は、自律航走体1のウェイポイントを第1〜第5平面ディスプレイ13〜17に表示させてもよい。この場合、ウェイポイントは、第3実施形態と同様に、“*”の記号36と、“*”を白抜きの丸で囲んだ記号37で表現されてもよい。
【0093】
処理装置30は、第1〜第5平面ディスプレイ13〜17に、各移動軌跡間の対応点を表示させてもよい。対応点を複数設定する場合は、第3実施形態と同様に、移動軌跡上の異なる位置における各対応点を視覚的に区別できるように、対応点を表示させるのがよい。
また、表示されている全体の移動軌跡上を対応点が周期的に移動するようにして、対応するポイントがわかるようにしてもよい。
【0094】
上述した第4実施形態によれば、第3実施形態と同様に、時間的に変化する自律航走体1の位置・移動軌跡を直観的にすばやく正確に把握でき、3次元空間における自律航走体1のウェイポイントを容易に把握でき、各平面ディスプレイ間の対応関係の把握が容易となる。
また、第4実施形態によれば、マルチディスプレイ12を回転させることで第2〜第5平面ディスプレイ14〜17に表示される投影画像が変化するので、確認したいポイントの軌跡をすばやく正確に把握することができる。
【0095】
なお、上述した第1実施形態と第3実施形態、あるいは、第2実施形態と第4実施形態を組み合わせ、自律航走体1の姿勢(必要に応じて、さらに移動方向とその速度、各スラスタ推力)を示す情報を表示させるモードと、自律航走体1の位置及び移動軌跡(必要に応じて、さらに移動軌跡間の対応点、ウェイポイント)を示す情報を表示させるモードとを切り替えられるように、処理装置30を構成してもよい。
【0096】
上記において、本発明の実施形態について説明を行ったが、上記に開示された本発明の実施の形態は、あくまで例示であって、本発明の範囲はこれら発明の実施の形態に限定されない。本発明の範囲は、特許請求の範囲の記載によって示され、さらに特許請求の範囲の記載と均等の意味および範囲内でのすべての変更を含むものである。
【符号の説明】
【0097】
1 自律航走体
1A 自律型無人潜水機
10 自律航走体運動モニタ用ディスプレイ装置
12 マルチディスプレイ
13 第1平面ディスプレイ
14 第2平面ディスプレイ
15 第3平面ディスプレイ
16 第4平面ディスプレイ
17 第5平面ディスプレイ
18 方位を示すマーク
20a〜20e 自律航走体の絵
22a〜22c 移動方向とその速度を示すベクトル
24 前後スラスタ推力を示すベクトル
25 左右スラスタ推力を示すベクトル
26 上下スラスタ推力を示すベクトル
28 旋回装置
29 旋回機構
30 処理装置
31 自律航走体の位置を示す記号
32a〜32c 自律航走体の移動軌跡を示すライン
34a〜34c 対応点
36 ウェイポイント
【特許請求の範囲】
【請求項1】
直方体における隣接する3面を構成するように互いに直交して配置された第1平面ディスプレイ、第2平面ディスプレイ及び第3平面ディスプレイを有し、前記第1平面ディスプレイが表示面を上に向けて水平配置されたマルチディスプレイと、
時間的に変化する自律航走体の運動状態を、異なる3面への投影によって3次元的に把握できるように前記面毎に図を生成し、生成した各図を、前記第1平面ディスプレイ、前記第2平面ディスプレイ及び前記第3平面ディスプレイに個別に表示させる処理装置と、を備えることを特徴とする自律航走体運動モニタ用ディスプレイ装置。
【請求項2】
前記自律航走体の前後軸をX軸、左右軸をY軸、上下軸をX軸とする直交座標系を定義したとき、
前記処理装置は、
前記自律航走体の前後軸の東西南北に対する方位を示す情報を前記第1平面ディスプレイに表示させ、
前記自律航走体のXZ平面における姿勢を示す情報を前記第2平面ディスプレイに表示させ、
前記自律航走体のYZ平面における姿勢を示す情報を前記第3平面ディスプレイに表示させる、請求項1記載の自律航走体運動モニタ用ディスプレイ装置。
【請求項3】
前記処理装置は、前記自律航走体の実際の東西南北に対する方位と、前記第1平面ディスプレイに表示される自律航走体の向きが同じになるように、前記第1平面ディスプレイに画像を表示させる、請求項2記載の自律航走体運動モニタ用ディスプレイ装置。
【請求項4】
さらに、前記マルチディスプレイを2面のディスプレイ平面に平行してマルチディスプレイ中心を通る軸を軸とする鉛直軸周りに回転させるように駆動する旋回装置を備え、
前記マルチディスプレイは、前記第1平面ディスプレイ、前記第2平面ディスプレイ及び前記第3平面ディスプレイで構成される直方体において前記第2平面ディスプレイに対面する面に配置された第4平面ディスプレイと、前記直方体において前記第3平面ディスプレイに対面する面に配置された第5平面ディスプレイとを有し、
前記処理装置は、
a)前記自律航走体のXZ平面における姿勢を示す情報を前記第4平面ディスプレイに表示させ、
b)前記自律航走体のYZ平面における姿勢を示す情報を前記第5平面ディスプレイに表示させ、
c)前記第1平面ディスプレイ上での自律航走体の向きを変化させずに、前記自律航走体の実際の向きと、前記第1平面ディスプレイに表示される自律航走体の向きが同じになるように、前記旋回装置を制御する、請求項2記載の自律航走体運動モニタ用ディスプレイ装置。
【請求項5】
前記処理装置は、
前記自律航走体のXY平面における移動方向とその速度を示す情報を前記第1平面ディスプレイに表示させ、
前記自律航走体のXZ平面における移動方向とその速度を示す情報を前記第2平面ディスプレイに表示させ、
前記自律航走体のYZ平面における移動方向とその速度を示す情報を前記第3平面ディスプレイに表示させる、請求項2乃至4のいずれか1項に記載の自律航走体運動モニタ用ディスプレイ装置。
【請求項6】
前記処理装置は、
前記自律航走体の前後スラスタ推力を示す情報と、前記自律航走体の左右スラスタ推力を示す情報を前記第1平面ディスプレイに表示させ、
前記自律航走体の前後スラスタ推力を示す情報と、前記自律航走体の上下スラスタ推力を示す情報を前記第2平面ディスプレイに表示させ、
前記自律航走体の左右スラスタ推力を示す情報と、前記自律航走体の上下スラスタ推力を示す情報を前記第3平面ディスプレイに表示させる、請求項2乃至5のいずれか1項に記載の自律航走体運動モニタ用ディスプレイ装置。
【請求項7】
前記処理装置は、前記自律航走体の位置及び移動軌跡を、直交する3面に投影した画像として、前記第1平面ディスプレイ、前記第2平面ディスプレイ及び前記第3平面ディスプレイに表示させる、請求項1記載の自律航走体運動モニタ用ディスプレイ装置。
【請求項8】
前記処理装置は、前記自律航走体の実際の移動軌跡の向きと、前記マルチディスプレイに表示される移動軌跡の向きが同じになるように、前記マルチディスプレイに画像を表示させる、請求項7記載の自律航走体運動モニタ用ディスプレイ装置。
【請求項9】
さらに、前記マルチディスプレイを、鉛直軸周りに回転自在に支持、あるいは鉛直軸周りに回転させるように駆動する旋回機構を備え、
前記マルチディスプレイは、前記第1平面ディスプレイ、前記第2平面ディスプレイ及び前記第3平面ディスプレイで構成される直方体において前記第2平面ディスプレイに対面する面に配置された第4平面ディスプレイと、前記直方体において前記第3平面ディスプレイに対面する面に配置された第5平面ディスプレイとを有し、
前記処理装置は、
a)互いに直交する5投影面のうち前記第2平面ディスプレイに対応する鉛直面と平行な鉛直面に対して前記自律航走体の位置及び移動軌跡を投影した画像を前記第4平面ディスプレイに表示させ、
b)互いに直交する5投影面のうち前記第3平面ディスプレイに対応する鉛直面と平行な鉛直面に対して前記自律航走体の位置及び移動軌跡を投影した画像を前記第5平面ディスプレイに表示させる、請求項8記載の自律航走体運動モニタ用ディスプレイ装置。
【請求項10】
前記処理装置は、前記自律航走体のウェイポイントを、前記第1平面ディスプレイ、前記第2平面ディスプレイ、前記第3平面ディスプレイ、前記第4平面ディスプレイ及び前記第5平面ディスプレイに表示させる、請求項7乃至9のいずれか1項に記載の自律航走体運動モニタ用ディスプレイ装置。
【請求項11】
前記処理装置は、前記第1平面ディスプレイ、前記第2平面ディスプレイ、前記第3平面ディスプレイ、前記第4平面ディスプレイ及び前記第5平面ディスプレイに、各移動軌跡間の対応点を表示させる、請求項7乃至10のいずれか1項に記載の自律航走体運動モニタ用ディスプレイ装置。
【請求項1】
直方体における隣接する3面を構成するように互いに直交して配置された第1平面ディスプレイ、第2平面ディスプレイ及び第3平面ディスプレイを有し、前記第1平面ディスプレイが表示面を上に向けて水平配置されたマルチディスプレイと、
時間的に変化する自律航走体の運動状態を、異なる3面への投影によって3次元的に把握できるように前記面毎に図を生成し、生成した各図を、前記第1平面ディスプレイ、前記第2平面ディスプレイ及び前記第3平面ディスプレイに個別に表示させる処理装置と、を備えることを特徴とする自律航走体運動モニタ用ディスプレイ装置。
【請求項2】
前記自律航走体の前後軸をX軸、左右軸をY軸、上下軸をX軸とする直交座標系を定義したとき、
前記処理装置は、
前記自律航走体の前後軸の東西南北に対する方位を示す情報を前記第1平面ディスプレイに表示させ、
前記自律航走体のXZ平面における姿勢を示す情報を前記第2平面ディスプレイに表示させ、
前記自律航走体のYZ平面における姿勢を示す情報を前記第3平面ディスプレイに表示させる、請求項1記載の自律航走体運動モニタ用ディスプレイ装置。
【請求項3】
前記処理装置は、前記自律航走体の実際の東西南北に対する方位と、前記第1平面ディスプレイに表示される自律航走体の向きが同じになるように、前記第1平面ディスプレイに画像を表示させる、請求項2記載の自律航走体運動モニタ用ディスプレイ装置。
【請求項4】
さらに、前記マルチディスプレイを2面のディスプレイ平面に平行してマルチディスプレイ中心を通る軸を軸とする鉛直軸周りに回転させるように駆動する旋回装置を備え、
前記マルチディスプレイは、前記第1平面ディスプレイ、前記第2平面ディスプレイ及び前記第3平面ディスプレイで構成される直方体において前記第2平面ディスプレイに対面する面に配置された第4平面ディスプレイと、前記直方体において前記第3平面ディスプレイに対面する面に配置された第5平面ディスプレイとを有し、
前記処理装置は、
a)前記自律航走体のXZ平面における姿勢を示す情報を前記第4平面ディスプレイに表示させ、
b)前記自律航走体のYZ平面における姿勢を示す情報を前記第5平面ディスプレイに表示させ、
c)前記第1平面ディスプレイ上での自律航走体の向きを変化させずに、前記自律航走体の実際の向きと、前記第1平面ディスプレイに表示される自律航走体の向きが同じになるように、前記旋回装置を制御する、請求項2記載の自律航走体運動モニタ用ディスプレイ装置。
【請求項5】
前記処理装置は、
前記自律航走体のXY平面における移動方向とその速度を示す情報を前記第1平面ディスプレイに表示させ、
前記自律航走体のXZ平面における移動方向とその速度を示す情報を前記第2平面ディスプレイに表示させ、
前記自律航走体のYZ平面における移動方向とその速度を示す情報を前記第3平面ディスプレイに表示させる、請求項2乃至4のいずれか1項に記載の自律航走体運動モニタ用ディスプレイ装置。
【請求項6】
前記処理装置は、
前記自律航走体の前後スラスタ推力を示す情報と、前記自律航走体の左右スラスタ推力を示す情報を前記第1平面ディスプレイに表示させ、
前記自律航走体の前後スラスタ推力を示す情報と、前記自律航走体の上下スラスタ推力を示す情報を前記第2平面ディスプレイに表示させ、
前記自律航走体の左右スラスタ推力を示す情報と、前記自律航走体の上下スラスタ推力を示す情報を前記第3平面ディスプレイに表示させる、請求項2乃至5のいずれか1項に記載の自律航走体運動モニタ用ディスプレイ装置。
【請求項7】
前記処理装置は、前記自律航走体の位置及び移動軌跡を、直交する3面に投影した画像として、前記第1平面ディスプレイ、前記第2平面ディスプレイ及び前記第3平面ディスプレイに表示させる、請求項1記載の自律航走体運動モニタ用ディスプレイ装置。
【請求項8】
前記処理装置は、前記自律航走体の実際の移動軌跡の向きと、前記マルチディスプレイに表示される移動軌跡の向きが同じになるように、前記マルチディスプレイに画像を表示させる、請求項7記載の自律航走体運動モニタ用ディスプレイ装置。
【請求項9】
さらに、前記マルチディスプレイを、鉛直軸周りに回転自在に支持、あるいは鉛直軸周りに回転させるように駆動する旋回機構を備え、
前記マルチディスプレイは、前記第1平面ディスプレイ、前記第2平面ディスプレイ及び前記第3平面ディスプレイで構成される直方体において前記第2平面ディスプレイに対面する面に配置された第4平面ディスプレイと、前記直方体において前記第3平面ディスプレイに対面する面に配置された第5平面ディスプレイとを有し、
前記処理装置は、
a)互いに直交する5投影面のうち前記第2平面ディスプレイに対応する鉛直面と平行な鉛直面に対して前記自律航走体の位置及び移動軌跡を投影した画像を前記第4平面ディスプレイに表示させ、
b)互いに直交する5投影面のうち前記第3平面ディスプレイに対応する鉛直面と平行な鉛直面に対して前記自律航走体の位置及び移動軌跡を投影した画像を前記第5平面ディスプレイに表示させる、請求項8記載の自律航走体運動モニタ用ディスプレイ装置。
【請求項10】
前記処理装置は、前記自律航走体のウェイポイントを、前記第1平面ディスプレイ、前記第2平面ディスプレイ、前記第3平面ディスプレイ、前記第4平面ディスプレイ及び前記第5平面ディスプレイに表示させる、請求項7乃至9のいずれか1項に記載の自律航走体運動モニタ用ディスプレイ装置。
【請求項11】
前記処理装置は、前記第1平面ディスプレイ、前記第2平面ディスプレイ、前記第3平面ディスプレイ、前記第4平面ディスプレイ及び前記第5平面ディスプレイに、各移動軌跡間の対応点を表示させる、請求項7乃至10のいずれか1項に記載の自律航走体運動モニタ用ディスプレイ装置。
【図1】


【図2】
【図3A】
【図3B】
【図4】
【図5】
【図2】
【図3A】
【図3B】
【図4】
【図5】
【公開番号】特開2010−247766(P2010−247766A)
【公開日】平成22年11月4日(2010.11.4)
【国際特許分類】
【出願番号】特願2009−101560(P2009−101560)
【出願日】平成21年4月20日(2009.4.20)
【出願人】(000000099)株式会社IHI (5,014)
【Fターム(参考)】
【公開日】平成22年11月4日(2010.11.4)
【国際特許分類】
【出願日】平成21年4月20日(2009.4.20)
【出願人】(000000099)株式会社IHI (5,014)
【Fターム(参考)】
[ Back to top ]