
自律走行制御装置
【課題】緊急時に車両の状態に応じてより迅速かつ的確な走行制御を行うことが可能な自律走行制御装置を提供する。
【解決手段】自律走行ECU1では、車両の周囲の状況(相対位置情報)に応じて走行計画を設定すると共に、他のECUからの異常情報に基づいて車両を緊急停止させる必要があると判定した場合には、制御系統の異常部位以外の特定部位である使用可能部位と予め設定された緊急停止モードとから一意に決まる制御指針に従って、車両を停止させるための走行計画を再設定する。しかも、車両における乗員および危険物の有無の少なくとも一方の情報に基づいて緊急停止モードを選択し、車内優先モードまたは車外優先モードのいずれかを走行計画の再設定に反映させることにより、緊急時の車内の状況に応じて、車両と車両の周囲とのいずれかの安全を的確に重視した制御を行うことが可能となる。
【解決手段】自律走行ECU1では、車両の周囲の状況(相対位置情報)に応じて走行計画を設定すると共に、他のECUからの異常情報に基づいて車両を緊急停止させる必要があると判定した場合には、制御系統の異常部位以外の特定部位である使用可能部位と予め設定された緊急停止モードとから一意に決まる制御指針に従って、車両を停止させるための走行計画を再設定する。しかも、車両における乗員および危険物の有無の少なくとも一方の情報に基づいて緊急停止モードを選択し、車内優先モードまたは車外優先モードのいずれかを走行計画の再設定に反映させることにより、緊急時の車内の状況に応じて、車両と車両の周囲とのいずれかの安全を的確に重視した制御を行うことが可能となる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、乗員の有無にかかわらず走行計画に従って自動走行するように車両を制御する自律走行制御装置に関する。
【背景技術】
【0002】
従来より、周知のナビゲーション技術を用いて現在地から目的地までの車両の走行経路を算出すると共に、レーダセンサや画像センサ等のセンシング技術を用いて道路区画線や障害物を検出して、その検出情報に基づき走行経路における車両の挙動(車速、加速度、操舵角など)を表す走行計画を設定し、その走行計画に従って車両の走行制御を行う自動走行制御装置が知られている(例えば、特許文献1参照)。
【0003】
また、この種の自動走行制御装置では、通常の走行計画の他に、車両の周囲の状況に応じて緊急時用の走行計画を設定し、例えば運転者の操作に起因する車両の予期せぬ挙動によって、車両とその車両の周囲の状況との相対関係に基づく安全レベルが所定の閾値レベルを下回ると、緊急時用の走行計画に従って停止するように車両を制御する処理を行うことが提案されている(例えば、特許文献2参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−61878号公報
【特許文献2】特開2009−51356号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、今般では、ナビゲーション技術やセンシング技術、車両に実装される各種の機能(例えば、ABS機能,横滑り防止機能,オートクルーズ機能,レーンキーピング機能)並びに処理速度の向上等に伴い、運転者を必要とすることなく、その車両を目的地まで自律的に走行させることが可能になりつつあり、すでに試験化されている。
【0006】
このような自動走行制御装置(以下、自律走行制御装置という)では、運転者を不要とすることから、従来の自動走行制御装置に比べて安全面をより強化する必要があり、具体的には車両の予期せぬ挙動を検出するよりも早い段階で、車両の制御系統の異常情報を取得しておき、その異常情報に基づいて、車両を緊急停止させる必要があるか否かを早期に判断する必要がある。
【0007】
しかし、従来の自動走行制御装置のように、単に車両の周囲の状況に応じて緊急時用の走行計画を設定するだけでは、上記のように車両を緊急停止させる必要があると早期に判断できた場合であっても、結局はその車両の状態にかかわることなく一律に制御が行われてしまうため、緊急時に必ずしも柔軟な対応が行えるとは限らないという懸念がある。
【0008】
本発明は、上記問題点を解決するために、緊急時に車両の状態に応じてより迅速かつ的確な走行制御を行うことが可能な自律走行制御装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するためになされた発明である請求項1に記載の自律走行制御装置は、予め設定された走行計画に従って車両の走行制御を行う電子制御装置であって、車両位置取得手段が、車両の位置情報を取得し、経路算出手段が、車両位置取得手段にて取得した位置情報と予め用意された地図データとに基づき、現在地から予め設定された目的地までの車両の走行経路を算出する。そして、相対位置取得手段が、車両の進行方向における道路区画線並びに障害物を検出して、これら車両に対する道路区画線並びに障害物の相対位置情報をそれぞれ取得し、挙動設定手段が、経路算出手段にて算出した走行経路と相対位置取得手段にて取得した相対位置情報とに基づき、その走行経路における車両の挙動を表す走行計画を設定する。なお、補足説明しておくと、走行計画は、相対位置情報に応じて設定されることから、例えば車両の挙動によってその車両と障害物との相対関係が変化して両者の衝突する可能性が増すと、衝突を回避するための挙動(迂回や停止など)として再設定されることになる。
【0010】
さらに、本発明の自律走行制御装置においては、制御異常取得手段が、車両における制御系統の異常情報を取得する。また、モード選択手段が、制御異常取得手段にて取得した異常情報に基づいて、制御系統の異常部位が予め設定された特定部位の一つである場合、車両を緊急停止させる必要があると判定し、その車両における乗員の有無および載置物の種類のうち少なくとも一方の情報に基づいて、車両の内部の安全を優先する車内優先モード、または車両の外部の安全を優先する車外優先モードのいずれかを表す緊急停止モードを選択する。
【0011】
そして、緊急停止設定手段が、制御系統における異常部位以外の特定部位を使用可能部位として、その使用可能部位とモード選択手段により選択される緊急停止モードとに応じて予め設定された制御指針に従い、車両を停止させるように走行計画を挙動設定手段に設定させるように構成した。
【0012】
つまり、本発明の自律走行制御装置では、車両の周囲の状況に応じて走行計画を設定することを前提としつつ、制御系統の異常情報に基づいて車両を緊急停止させる必要があると判定した場合には、車両における正常な特定部位(使用可能部位)と予め選択される緊急停止モードとから一意に決まる制御指針に従って、車両を停止させるために走行計画を再設定する。
【0013】
しかも、本発明の自律走行制御装置では、緊急停止モードが、車両における乗員の有無および載置物の種類のうち少なくとも一方の情報に基づいて選択され、車内優先モードまたは車外優先モードのいずれかが走行計画の再設定に反映されるため、緊急時の車内の状況に応じて、車両の内部と外部とのいずれかの安全を的確に重視した制御を行うことができる。
【0014】
したがって、本発明の自律走行制御装置によれば、車両における緊急停止の要否および走行計画の再設定を迅速に行うことができ、なお且つ、車両の周囲の状況だけでなく、車両における特定部位の状態および車内の状況が走行計画に反映されることから、ひいては緊急時に車両の状態に応じてより迅速かつ的確な走行制御を行うことができる。
【0015】
ところで、緊急停止設定手段は、上記の制御指針に従って各種の処理を実行し得るが、請求項2に記載のように、車両のステアリングを制御する操舵制御装置が使用可能部位に含まれている場合、車両を停止させるための停止位置を目的地として走行経路を経路算出手段に算出させる停止位置設定処理を実行するようにしてもよい。
【0016】
このように構成された自律走行制御装置によれば、操舵制御装置を用いてステアリングを自動操作できることから、走行経路上の目的地としての停止位置まで車両を誘導することにより、比較的安全に車両を停止させることができる。
【0017】
また、詳細には、請求項3に記載のように、上記の特定部位として、操舵制御装置の他に、車両のエンジンを制御するエンジン制御装置、及び、車両のブレーキを制御するブレーキ制御装置が予め設定されており、なお且つ、上記の地図データに、停止位置としての候補場所が予め設定された安全レベルに対応づけて記憶されている構成では、以下のように処理を行ってもよい。
【0018】
即ち、停止位置設定処理は、操舵制御装置と共にエンジン制御装置またはブレーキ制御装置のいずれか一つの制御装置が使用可能部位に含まれている場合、車内優先モード時では、車両に搭載された燃料の残量に基づいてその車両の走行可能距離を算出し、地図データにおける上記の候補場所の中からその走行可能距離内で最も安全レベルの高い場所を停止位置として設定するようにしてもよい。
【0019】
このように構成された自律走行制御装置によれば、操舵制御装置を用いてステアリングを自動操作でき、なお且つ、エンジン制御装置またはブレーキ制御装置を用いて車両の自動制動を行えることから、車内優先モード時において、車両が走行可能な範囲内で最も安全な停止位置まで車両を誘導することにより、車両自体および車内の安全を最も重視して車両を停止させることができる。
【0020】
また、請求項4に記載のように、上記の地図データに少なくとも停止位置としての候補場所が記憶されている構成において、停止位置設定処理は、車外優先モード時では、地図データにおける上記の候補場所の中から現在地に最も近い場所を停止位置として設定するようにしてもよい。
【0021】
このように構成された自律走行制御装置によれば、車外優先モード時において、現在地から最も近い停止位置まで車両を誘導することで、制御系統のいずれかに異常を抱える車両の走行距離を短縮することができ、これにより、その車両によって周囲が危険に晒される可能性のある時間を減らすことができることから、周囲の安全を比較的重視しつつ、車両を停止させることができる。
【0022】
一方、請求項5に記載のように、操舵制御装置が異常部位である場合においては、緊急停止設定手段が、地図データおよび道路区画線の少なくとも一つの情報に基づいて、車両の操舵角が現状のまま推移した場合にその車両が移動可能な移動可能距離を算出し、その移動可能距離内で車両を停止させるための緊急停止処理を実行するようにしてもよい。
【0023】
このように構成された自律走行制御装置によれば、ステアリングが操作不能な状態である(あるいは操作不能な状態になる危険性がある)ことから、ステアリング操作の可否にかかわらず車両が移動可能な範囲内で制動制御することにより、確実に車両を停止させることができる。
【0024】
ところで、緊急停止設定手段は、上記の制御指針に従って各種の処理を実行し得るが、この制御指針は、請求項6に記載のように、車内優先モードの方が車外優先モードに比べて、緊急停止処理における車両の加速度の上限値が小さく設定されていてもよい。なお、補足説明しておくと、加速度の上限値とは、車両が減速する場合においては減速度の上限値を意味する概念として用いられる。
【0025】
このように構成された自律走行制御装置によれば、車内優先モード時において、車両にかかる加速度(減速度)を抑えることで、車内の安全をより重視して車両を停止させることができる。なお、移動可能距離内で車両を停止させるために比較的大きい加速度(減速度)を必要とする場合には、エアバッグなどの各種の安全装置を作動させるようにしてもよい。
【図面の簡単な説明】
【0026】
【図1】本発明が適用された自律走行制御装置を含む車載ネットワークシステムの概略構成を示すブロック図である。
【図2】本発明が適用された自律走行制御装置の構成を表す機能ブロック図である。
【図3】自律走行制御装置が実行する緊急走行制御処理の内容を詳細に示すフローチャートである。
【図4】緊急走行制御処理におけるモード選択処理の内容を詳細に示すフローチャートである。
【図5】緊急走行制御処理における停止位置設定処理の内容を詳細に示すフローチャートである。
【図6】緊急走行制御処理における緊急停止処理の内容を詳細に示すフローチャートである。
【図7】制御指針の概略を示すマトリックス図である。
【発明を実施するための形態】
【0027】
以下に、本発明の実施形態を図面と共に説明する。
[全体構成]
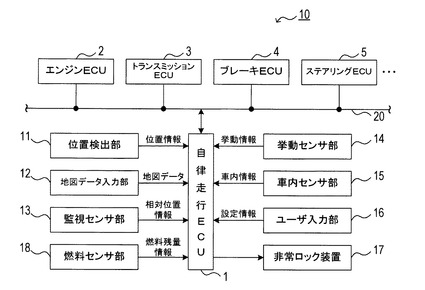
図1は、本発明が適用された自律走行制御装置(以下、自律走行ECU1という)を含む車載ネットワークシステム10の全体構成を示すブロック図である。
【0028】
図1に示すように、車載ネットワークシステム10は、車両に搭載されるシステムであって、その車両を目的地まで自律的に走行させるために、自律走行ECU1が、エンジンのスロットル開度,燃料噴射量,点火時期等を制御するエンジンECU2や、自動変速機を制御するトランスミッションECU3、車両における前後左右の車輪に対するブレーキを制御するブレーキECU4、車両のステアリングを制御するステアリングECU5などの電子制御装置に対して、各種の制御指令を送信可能に構成されている。
【0029】
そして、少なくともこれらECU2〜5が、自律走行ECU1と共に通信バス20を介して互いに通信可能に接続されており、その通信バス20を介して、自律走行ECU1からの制御指令としての走行計画(後述する)を受信すると、その受信データから特定される運転状態となるように、エンジン,自動変速機,ブレーキ,ステアリングを制御するように構成されている。なお、ブレーキECU4は、周知のABS機能や横滑り防止機能を実現するための制御処理を実行するようにも構成されている。
【0030】
また、各ECU2〜5は、それぞれエンジン,自動変速機,ブレーキ,ステアリングの作動状態に基づいて、これら制御対象機器を正常に制御できているか否かを診断する周知の自己診断機能を実現するための制御処理を実行するようにも構成されており、この処理により制御系統の異常を検出した場合には、その検出結果を表す情報(異常情報)を、通信バス20を介して自律走行ECU1に送信する。
【0031】
自律走行ECU1には、これらECU2〜5の他に、車両の位置情報を取得するための位置検出部11と、地図データを入力する地図データ入力部12と、車両に対する道路区画線並びに障害物の相対位置情報をそれぞれ取得するための監視センサ部13と、車両の現状の挙動を表す挙動情報を取得するための挙動センサ部14と、車内の状況を表す車内情報を取得するための車内センサ部15と、ユーザによる入力操作を受け付けるユーザ入力部16と、上述のブレーキとは独立して設けられ車両の駆動輪を緊急的にロックするための非常ロック装置17と、車両に搭載された燃料(例えばガソリン)の残量を検出してその検出結果を表す情報(燃料残量情報)を出力する燃料センサ部18とが接続されている。
【0032】
位置検出部11は、GPS用の人工衛星からの電波(GPS信号)を受信するGPS受信機の他に、車両に加えられる回転運動の大きさを検出するジャイロスコープや、3軸方向の加速度等から車両の走行距離を検出する加速度センサ、地磁気から車両の進行方向を検出する地磁気センサ等を備え、GPS信号を受信できない状況であってもいわゆる自律航法により車両の現在地を算出するように構成されている。
【0033】
地図データ入力部12は、ハードディスク等の書き込み可能な記憶媒体に記憶されている地図データを入力するための装置であり、図示しない無線通信機により取得する最新の道路情報や交通情報といった各種の更新情報を地図データと対応づけて記憶すると共に、地図データをバージョンアップして最新の状態に維持するように構成されている。また、地図データには、道路形状が詳細に記憶されており、なお且つ、車両を緊急停止させる必要がある場合の停止位置としての候補場所が、道路形状や交通量、交通機関へのアクセスの容易さ等に基づいて予め設定された安全レベルに対応づけて記憶されている。
【0034】
監視センサ部13は、車両の進行方向における道路区画線並びに障害物を少なくとも検出するために、車両の前後左右各部に設置されたレーダセンサ及び画像センサを備えて構成される。このうち、レーダセンサは、ミリ波,レーザ光,および超音波の少なくともいずれかの電波を用いて送受信することで、所定検出範囲内に位置する障害物を検出し、車両に対するその障害物の相対位置などを表すターゲット情報を作成する。一方、画像センサは、車両の進行方向に位置する走行道路を含む周囲画像を撮像し、その走行道路における道路区画線を検出すると共に、周囲画像に基づいてターゲット情報に含まれている障害物の種類(他車両や建物、通行者など)を特定し、道路区画線並びに特定された障害物の相対位置を表す情報(相対位置情報)を出力する。
【0035】
挙動センサ部14は、位置検出部11にて用いられる各種センサを利用すると共に、車両の走行速度(車速)を検出する車速センサや、車両の直進方向に対する操舵角を検出する操舵角センサ等の検出値に基づく情報(挙動情報)を出力する。
【0036】
車内センサ部15は、座席にかかる圧力を検出する圧力センサや、車内画像を撮像する車内カメラ等を備え、例えば圧力センサの検出値が所定値を上回る場合に、乗員が存在すると判断したり、車内画像に基づいて乗員の数や構成を認識したり、車両における載置物の有無を検出し、これらの結果を示す情報(車内情報)を出力する。
【0037】
ユーザ入力部16は、車両の走行前にユーザによって各種の情報を入力するための装置であって、例えば目的地や載置物の種類などを設定するための情報を受け付けるための画面をディスプレイ等に表示させると共に、ユーザによって入力された情報(設定情報)を出力するように構成されている。
【0038】
[自律走行ECUの構成]
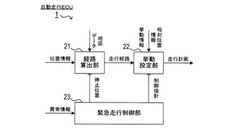
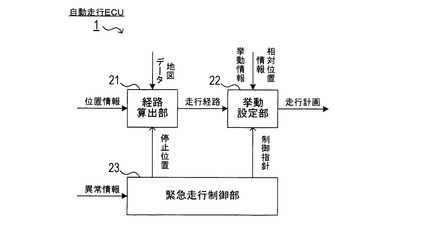
次に、図2は、本発明が適用された自律走行制御装置としての自律走行ECU1の構成を表す機能ブロック図である。
【0039】
図2に示すように、自律走行ECU1は、現在地から予め設定された目的地までの車両の走行経路を算出する経路算出部21と、経路算出部21にて算出された走行経路における車両の挙動を表す走行計画を設定する挙動設定部22と、緊急時に走行計画を再設定するための制御を行う緊急走行制御部23とを備えている。
【0040】
なお、経路算出部21,挙動設定部22,緊急走行制御部23は、いずれも、CPU,ROM,RAM,EEPROM,DSP(デジタルシグナルプロセッサ)等を備えた周知のマイクロコンピュータ上で周期的に実行される処理として実現される。
【0041】
経路算出部21は、位置検出部11にて取得した位置情報と、地図データ入力部12から入力される地図データとに基づき、周知のナビゲーション技術を用いて現在地から目的地までの最適な走行経路を自動的に求める経路計算を行い、計算結果を挙動設定部22に出力する。そして、緊急走行制御部23から後述する停止位置を指定する情報が入力された場合には、その停止位置を目的地として走行経路を再計算するように構成されている。
【0042】
挙動設定部22は、経路算出部21にて算出した走行経路と、監視センサ部13にて取得した相対位置情報とに基づき、周知のオートクルーズ機能やレーンキーピング機能を実現するための制御処理を実行すると共に、挙動センサ部14にて取得した挙動情報に基づき、走行経路における車両の挙動(車速,加速度,操舵角など)を表す最適な走行計画を設定する。例えば、車速が所定値を上回る状態ではオートクルーズ機能により先行車両に追従し、車速が所定値を下回ると、相対位置情報に基づいて隣接車線(追越車線など)に車線変更して走行する場合の車速を推定し、その変更前後の車速を比較することにより、最適な走行車線を選択する処理を実行し、その処理結果を走行計画に反映させる。
【0043】
また、挙動設定部22は、上記の挙動情報の連続的な変化から障害物(例えば他車両)の相対速度、及び、相対位置からの移動方向を算出し、上記の挙動情報に基づき、車速および操舵角が現状のまま推移した場合に予測される車両の予測走行軌跡を求め、その軌跡上において障害物と車両とが衝突する可能性(本実施形態では、TTCに基づく衝突可能性)の有無を判定し、判定結果に応じて衝突を回避するために走行計画を再設定する。また、障害物の挙動によりTTCが所定の閾値を下回る場合には、車両を緊急停止させるために走行計画を再設定する。なお、補足説明しておくと、TTCとは、車両に対する障害物の相対距離を相対速度で除算することにより得られる値であり、現在時から仮の衝突時までの余裕時間(いわゆる衝突余裕時間)を表す概念である。
【0044】
さらに、挙動設定部22は、緊急走行制御部23から後述する制御指針を指定する情報が入力された場合には、その制御指針に従って車両を停止させるための走行計画を再設定するように構成されている。なお、挙動設定部22にて設定された走行計画は、自律走行ECU1による制御指令として、通信バス20を介して随時、他のECU2〜5に送信され、これらECU2〜5によって、各制御対象機器(エンジン,自動変速機,ブレーキ,ステアリング)が制御されることにより、当該走行計画に従った車両の走行制御が実現される。
【0045】
[緊急走行制御処理]
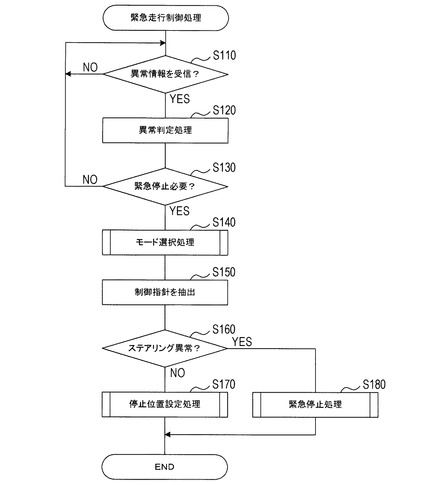
次に、緊急走行制御部23の制御処理(緊急走行制御処理)を、図3のフローチャートに沿って詳しく説明する。なお、本処理は、車両のイグニションキー(IGキー)がオンされると起動し、IGキーがオフされると終了する。
【0046】
まず、本処理が開始されると、S110では、通信バス20を介していずれかのECU2〜5から異常情報を受信したか否かを判断し、ここで肯定判断した場合にはS120に移行し、否定判断した場合には、異常情報を受信するまで待機する。
【0047】
S120では、S110で受信した異常情報に基づいて、制御系統の異常部位が予め設定された特定部位の一つであるか否かを判定する異常判定処理を行い、S130に移行する。なお、本実施形態では、この特定部位として、エンジンECU2、ブレーキECU4、およびステアリングECU5が設定されている。また、異常判定処理では、制御系統の異常レベルが予め設定された閾値レベルを上回る場合に該当する制御系統の部位を異常部位として扱うようにしている。
【0048】
S130では、S120における異常判定処理の処理結果に基づいて、車両を緊急停止させる必要があるか否か判断し、ここで、制御系統の異常部位が特定部位の一つであることを処理結果が示す場合(即ち、肯定判断した場合)、S140に移行し、一方、否定判断した場合にはS110に移行する。
【0049】
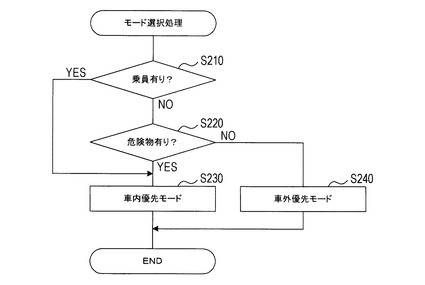
S140では、車内センサ部15から入力された車内情報、及び、ユーザ入力部16にて設定された設定情報に基づいて、以下の車内優先モードまたは車外優先モードのいずれかを表す緊急停止モードを選択するモード選択処理を実行する。なお、図4は、モード選択処理の詳細を示すフローチャートである。
【0050】
図4に示すように、モード選択処理では、車内センサ部15から入力された車内情報に基づいて、車両に乗員が存在すると判定した場合には(S210;YES)、車両の内部の安全を優先する車内優先モードを設定し(S230)、本処理を終了する。また、車両に乗員が存在しない(非存在である)と判定した場合であっても(S210;NO)、ユーザ入力部16にて設定された設定情報に基づいて、載置物の種類が危険物であると判定した場合(S220;YES)にも車内優先モードを設定し、本処理を終了する。一方、車両に乗員および危険物が共に存在しない(非存在である)と判定した場合には(S220;NO)、車両の外部の安全を優先する車外優先モードを設定し(S240)、本処理を終了する。
【0051】
図3に戻り、S150では、予め用意された複数の制御指針のうち、S120における異常判定処理、及びS140におけるモード選択処理の処理結果に基づいて一意に決定される制御指針を抽出する。なお、制御指針は、車両を緊急停止させる必要がある場合に、挙動設定部22に走行計画を再設定させるための必要最小限の指針であり、制御系統における異常部位以外の特定部位(以下、使用可能部位という)と、モード選択処理により設定される緊急停止モードとに対応づけて予め複数用意されている。
【0052】
次に、S160以降では、S150にて抽出された制御指針に従って、車両を停止させるように走行計画を挙動設定部22に再設定させる(場合によっては、走行経路を経路算出部21に再計算させる)処理を行う。
【0053】
具体的には、S120における異常判定処理の処理結果に基づいて、ステアリングECU5が制御系統の異常部位に含まれている(換言すれば、ステアリングECU5が使用可能部位に含まれていない)か否かを判断する(S160)。ここで使用可能部位に含まれていると判断した場合(即ち、否定判断した場合)には(S160;NO)、車両を停止させるための停止位置を目的地として走行経路を経路算出部21に再計算させるための停止位置設定処理を実行し(S170)、本処理を終了する。一方、ステアリングECU5が異常部位に含まれていると判断した場合(即ち、肯定判断した場合)には(S160;YES)、走行経路の再計算を経ずに、車両を比較的早期に停止させるように走行計画を挙動設定部22に再設定させるための緊急停止処理を実行し(S180)、本処理を終了する。
【0054】
[停止位置設定処理]
次に、緊急走行制御処理のS170における停止位置設定処理を、図4のフローチャートに沿って詳しく説明する。
【0055】
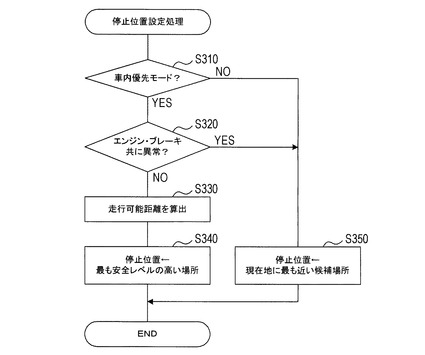
まず、本処理が開始されると、S310では、緊急走行制御処理のS140におけるモード選択処理で設定された緊急停止モードが車内優先モードであるか否かを判断し、ここで肯定判断した場合にはS320に移行し、否定判断した場合にはS350に移行する。
【0056】
S320では、緊急走行制御処理のS120における異常判定処理の処理結果に基づいて、エンジンECU2とブレーキECU4とが共に制御系統の異常部位に含まれている(換言すれば、ステアリングECU5だけが使用可能部位である)か否かを判断する。そして、ここで肯定判断した場合にはS350に移行し、一方、エンジンECU2またはブレーキECU4のいずれか一つの電子制御装置が使用可能部位に含まれている場合(即ち、否定判断した場合)には、S330に移行する。
【0057】
S330では、燃料センサ部18から入力された燃料残量情報に基づいて、車両に搭載された燃料の残量を消費することによって車両が走行可能な距離(走行可能距離)を算出し、S340に移行する。
【0058】
S340では、S330で算出した走行可能距離に基づいて、地図データ入力部12から入力された地図データを参照し、その地図データにおける停止位置としての候補場所のうち、走行可能距離内で最も安全レベルの高い場所(複数存在する場合にはその中で最も近い場所)を停止位置に指定し、その停止位置を指定する情報を緊急走行制御部23に出力して、本処理を終了する。
【0059】
つまり、ステアリングECU5を用いてステアリングを自動操舵でき、なお且つ、エンジンECU2またはブレーキECU4を用いて車両の自動制動を行えることから、車内優先モードの場合に、車両が走行可能な範囲内で最も安全な停止位置まで車両を誘導することにより、車両自体および車内の安全を最も重視して車両を停止させるようにしている。
【0060】
一方、S350では、位置検出部11にて取得した位置情報に基づいて、地図データ入力部12から入力された地図データを参照し、その地図データにおける停止位置としての候補場所の中から車両の現在地に最も近い場所を停止位置に指定し、その停止位置を指定する情報を緊急走行制御部23に出力して、本処理を終了する。
【0061】
つまり、車外優先モードの場合には、エンジンECU2およびブレーキECU4の少なくとも一方に異常を抱える車両の走行距離を短縮することで、その車両によって周囲が危険に晒される可能性のある時間を減らすために、現在地から最も近い停止位置まで車両を誘導することにより、周囲の安全を比較的重視しつつ車両を停止させるようにしている。
【0062】
[緊急停止処理]
次に、緊急走行制御処理のS180における緊急停止処理を、図5のフローチャートに沿って詳しく説明する。
【0063】
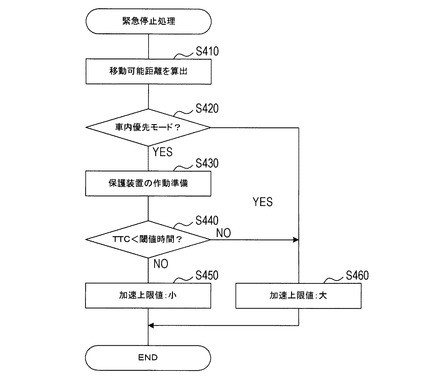
まず、本処理が開始されると、S410では、挙動センサ部14にて取得した挙動情報と、挙動設定部22にて算出される予測走行軌跡とに基づいて、地図データ入力部12から入力された地図データを参照し、ステアリングを操作することなく車速(及び加速度)だけを制御することにより車両が移動可能な最大距離(移動可能距離)を算出する。
【0064】
続くS420では、緊急走行制御処理のS140におけるモード選択処理で設定された緊急停止モードが車内優先モードであるか否かを判断し、ここで肯定判断した場合にはS430に移行し、否定判断した場合にはS460に移行する。
【0065】
S430では、インテリアパーツとしての周知のエアバッグや、エクステリアパーツとしての周知のポップアップフード、アクティブグリル、フードエアバッグ等といった保護装置を展開可能な状態に駆動することにより、衝突時にこれら保護装置を迅速に作動させるための準備を行う。なお、補足説明しておくと、例えば、ポップアップフードは、ボンネットフードの後方側を持ち上げるように作動し、エンジン等との間に空間を形成する装置であり、アクティブグリルは、左右ヘッドライトの間に設置されたラジエータグリルを前方側に突き出すように作動し、ラジエータ等との間に空間を形成する装置である。つまり、ポップアップフード及びアクティブグリルは、硬質のエンジン及びラジエータ等と障害物(通行者や他車両等)との衝撃を緩和させるために設けられている。
【0066】
続くS440では、挙動設定部22にて算出されたTTCが所定の閾値時間を下回るか否か(換言すれば、予測走行軌跡上における所定距離内に障害物が存在するか否か)を判断し、ここで肯定判断した場合にはS450に移行し、否定判断した場合にはS460に移行する。
【0067】
S450では、車両における加速度の上限値(加速上限値)を、制御指針にて予め規定された規定値よりも小さく設定する制約を付加して、上述の移動可能距離内で車両を緊急停止させるように走行計画を再設定させるための制御指針を、挙動設定部22に出力し、本処理を終了する。
【0068】
一方、S440で否定判断した場合に移行するS460では、制御指針にて予め規定された規定値よりも加速上限値を大きく設定する制約を付加して、上述の移動可能距離内で車両を緊急停止させるように走行計画を再設定させるための制御指針を、挙動設定部22に出力し、本処理を終了する。ちなみに、S420で否定判断した場合(車外優先モードの場合)に移行するS460では、上述の制約を付加することなく、制御指針にて予め規定された加速上限値の規定値を用いるようにする。
【0069】
なお、制御指針では、車両に乗員または危険物が存在する場合に、その車両にかかる加速度(減速度)を抑えることで、車内の安全をより重視して車両を停止させるために、車内優先モードの方が車外優先モードに比べて、加速上限値の規定値が小さく規定されている。
【0070】
[動作例]
次に、図7は、制御指針の概略を示すマトリックス図であり、この図を用いて動作例を説明する。
【0071】
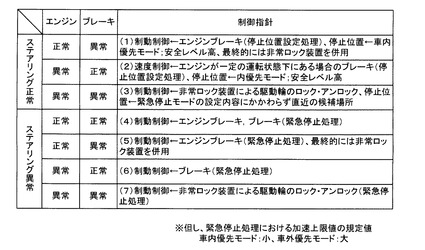
図7に示すように、制御指針は、ステアリングの自動操舵に関する制御系統が正常であるか否か(ステアリングECU5が使用可能部位に含まれているか否か)によって大別され、ステアリング正常時には停止位置設定処理を実行し、ステアリング異常時には緊急停止処理を実行するように定めている。
【0072】
また、制御指針は、エンジンの自動運転に関する制御系統、及び、ブレーキの自動制動に関する制御系統が正常であるか否か(エンジンECU2,ブレーキECU4が使用可能部位に含まれているか否か)によって、車両の制動制御や速度制御の方法を詳細に規定している。
【0073】
具体的には、自律走行ECU1では、制御指針に従って、ステアリング正常時においては、以下の(1)〜(3)によって、車両を停止させることにしている。
(1)エンジン制御が正常であり、ブレーキ制御に異常がある場合、エンジンブレーキ(及び自動変速機によるシフトダウン)を用いて制動制御を行うことにより、車両を停止位置まで誘導する(最終的にはエンジンブレーキと非常ロック装置17とを併用して停止させる)。なお、車内優先モード時には、車外優先モード時以上に安全レベルが高い候補場所を停止位置とする。
【0074】
(2)エンジン制御に異常があり、ブレーキ制御が正常である場合、エンジンが一定の運転状態下にあることを前提とし、ブレーキを用いて速度制御(減速制御)を行うことにより、車両を停止位置まで誘導する(最終的にはブレーキによって停止させる)。なお、車内優先モード時には、車外優先モード時以上に安全レベルが高い候補場所を停止位置とする。
【0075】
(3)エンジン制御、ブレーキ制御が共に異常がある場合、非常ロック装置17を用いて駆動輪をロック・アンロックする制動制御を行うことにより、車両を停止位置まで誘導する(最終的には非常ロック装置17によって停止させる)。なお、緊急停止モードの設定内容にかかわらず、車両の現在地から所定距離(例えば数十メートル)以内の候補場所を停止位置とする。
【0076】
また、自律走行ECU1では、制御指針に従って、ステアリング異常時においては、以下の(4)〜(7)によって、車両を停止させることにしている。なお、上述のように、車内優先モード時には、車外優先モード時と比較して車両の加速度(減速度)が抑制されると共に、万が一の衝突等により所定の衝突加速度に達すると、障害物や車内情報(及び設定情報)に応じて該当する安全装置を作動させることにしている。
【0077】
(4)エンジン制御、ブレーキ制御が共に正常である場合、エンジンブレーキ(及び自動変速機によるシフトダウン)とブレーキとを併用して制動制御を行うことにより、車両を緊急停止させる。
【0078】
(5)エンジン制御が正常であり、ブレーキ制御に異常がある場合、エンジンブレーキ(及び自動変速機によるシフトダウン)を用いて制動制御を行うことにより、車両を緊急停止させる(最終的には非常ロック装置17によって停止させる)。
【0079】
(6)エンジン制御に異常があり、ブレーキ制御が正常である場合、ブレーキを用いて制動制御を行うことにより、車両を緊急停止させる。
(7)エンジン制御、ブレーキ制御が共に異常がある場合、非常ロック装置17を用いて駆動輪をロック・アンロックする制動制御を行うことにより、車両を緊急停止させる。
【0080】
[本実施形態と特許請求の範囲との対応]
なお、本実施形態において、位置検出部11(詳細には位置情報を取得する処理)が車両位置取得手段、経路算出部21が経路算出手段、監視センサ部13(詳細には相対位置情報を取得する処理)が相対位置取得手段、挙動設定部22が挙動設定手段、ECU2〜5およびS110が制御異常取得手段、S120〜S140がモード選択手段、S150〜S180が緊急停止設定手段に相当する。
【0081】
[本実施形態の効果]
以上説明したように、本実施形態の自律走行ECU1では、車両の周囲の状況に応じて走行計画を設定すると共に、他のECU2〜5からの異常情報に基づいて車両を緊急停止させる必要があると判定した場合には、使用可能部位と緊急停止モードとから一意に決まる制御指針に従って、車両を停止させるために走行計画を再設定する。
【0082】
しかも、自律走行ECU1では、車両における乗員および危険物の有無の少なくとも一方の情報に基づいて緊急停止モードを選択し、車内優先モードまたは車外優先モードのいずれかを走行計画の再設定に反映させることにより、緊急時の車内の状況に応じて、車両と車両の周囲とのいずれかの安全を的確に重視した制御を行うことが可能となる。
【0083】
したがって、本実施形態の自律走行ECU1によれば、車両における緊急停止の要否および走行計画の再設定を迅速に行うことができ、なお且つ、車両の周囲だけでなく、車両における特定部位の状態および車内の状況が走行計画に反映されることから、ひいては緊急時に車両の状態に応じてより迅速かつ的確な走行制御を行うことができる。
【0084】
また、自律走行ECU1が実行する停止位置設定処理(ステアリング制御が正常であることを前提として起動される処理)では、車内優先モード時においても、エンジン制御、ブレーキ制御が共に異常があれば、地図データにおける現在地から最も近い候補場所を停止位置として設定する。このため、単に緊急停止モードの設定内容に応じて停止位置の設定方法を変更する場合と比べて、より車両の状態に応じた走行制御(停止制御)を行うことができる。
【0085】
さらに、自律走行ECU1が実行する緊急停止処理(ステアリング制御に異常があることを前提として起動される処理)では、車内優先モード時においても、TTCが閾値時間を下回れば、規定値に比べて加速上限値を大きく設定する。このため、単に緊急停止モードの設定内容に応じて加速上限値の規定値を用いる場合と比べて、より車両の周囲の状況に応じた走行制御(緊急停止)を行うことができる。
【0086】
[他の実施形態]
以上、本発明の実施形態について説明したが、本発明は上記実施形態に限定されるものではなく、本発明の要旨を逸脱しない範囲において、様々な態様にて実施することが可能である。
【0087】
例えば、上記実施形態の緊急停止処理では、車内優先モード時にTTCを用いた閾値判定により、加速上限値の規定値を可変設定しているが、これに限らず、TTCにかかわらず、制御指針に予め設定された規定値を用いてもよい。また、加速上限値の規定値を可変設定する場合であっても、例えば乗員の構成(子供や大人の数)に応じて設定(子供が乗っている場合には極力小さく設定)してもよい。
【0088】
また、上記実施形態では、乗員の数や構成を車内画像に基づいて認識している(この種の情報が車内情報に含まれている)が、これに限定されずに、例えばユーザ入力部16を介してユーザにより設定情報としてこの種の情報を予め入力する構成でもよい。逆に、危険物の有無を、車内画像に基づいて例えば載置物に貼られたシールの図柄や文字から認識するようにしてもよい。
【0089】
また、上記実施形態の制御指針では、ステアリング制御が正常であるか否かによって、停止位置設定処理または緊急停止処理のいずれかを実行するように規定されているが、これに限定されるものではなく、例えばステアリング正常時においてもエンジン制御、ブレーキ制御が共に異常があれば、緊急停止処理を実行するように例外規定を設けてもよい。つまり、上記実施形態の制御指針は、あくまでも一例であり、少なくとも使用可能部位と緊急停止モードとに応じて予め設定されていればよい。また、トランスミッションECU3についても特定部位に設定しておいてもよい。
【0090】
なお、上記実施形態の自律走行ECU1は、乗員の有無にかかわらず走行計画に従って車両を自動走行させることを念頭に置いているが、運転者の操作をアシストする従来の自動走行制御装置に適用してもよい。
【符号の説明】
【0091】
1…自律走行ECU、2…エンジンECU、3…トランスミッションECU、4…ブレーキECU、5…ステアリングECU、10…車載ネットワークシステム、11…位置検出部、12…地図データ入力部、13…監視センサ部、14…挙動センサ部、15…車内センサ部、16…ユーザ入力部、17…非常ロック装置、18…燃料センサ部、20…通信バス、21…経路算出部、22…挙動設定部、23…緊急走行制御部。
【技術分野】
【0001】
本発明は、乗員の有無にかかわらず走行計画に従って自動走行するように車両を制御する自律走行制御装置に関する。
【背景技術】
【0002】
従来より、周知のナビゲーション技術を用いて現在地から目的地までの車両の走行経路を算出すると共に、レーダセンサや画像センサ等のセンシング技術を用いて道路区画線や障害物を検出して、その検出情報に基づき走行経路における車両の挙動(車速、加速度、操舵角など)を表す走行計画を設定し、その走行計画に従って車両の走行制御を行う自動走行制御装置が知られている(例えば、特許文献1参照)。
【0003】
また、この種の自動走行制御装置では、通常の走行計画の他に、車両の周囲の状況に応じて緊急時用の走行計画を設定し、例えば運転者の操作に起因する車両の予期せぬ挙動によって、車両とその車両の周囲の状況との相対関係に基づく安全レベルが所定の閾値レベルを下回ると、緊急時用の走行計画に従って停止するように車両を制御する処理を行うことが提案されている(例えば、特許文献2参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−61878号公報
【特許文献2】特開2009−51356号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、今般では、ナビゲーション技術やセンシング技術、車両に実装される各種の機能(例えば、ABS機能,横滑り防止機能,オートクルーズ機能,レーンキーピング機能)並びに処理速度の向上等に伴い、運転者を必要とすることなく、その車両を目的地まで自律的に走行させることが可能になりつつあり、すでに試験化されている。
【0006】
このような自動走行制御装置(以下、自律走行制御装置という)では、運転者を不要とすることから、従来の自動走行制御装置に比べて安全面をより強化する必要があり、具体的には車両の予期せぬ挙動を検出するよりも早い段階で、車両の制御系統の異常情報を取得しておき、その異常情報に基づいて、車両を緊急停止させる必要があるか否かを早期に判断する必要がある。
【0007】
しかし、従来の自動走行制御装置のように、単に車両の周囲の状況に応じて緊急時用の走行計画を設定するだけでは、上記のように車両を緊急停止させる必要があると早期に判断できた場合であっても、結局はその車両の状態にかかわることなく一律に制御が行われてしまうため、緊急時に必ずしも柔軟な対応が行えるとは限らないという懸念がある。
【0008】
本発明は、上記問題点を解決するために、緊急時に車両の状態に応じてより迅速かつ的確な走行制御を行うことが可能な自律走行制御装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するためになされた発明である請求項1に記載の自律走行制御装置は、予め設定された走行計画に従って車両の走行制御を行う電子制御装置であって、車両位置取得手段が、車両の位置情報を取得し、経路算出手段が、車両位置取得手段にて取得した位置情報と予め用意された地図データとに基づき、現在地から予め設定された目的地までの車両の走行経路を算出する。そして、相対位置取得手段が、車両の進行方向における道路区画線並びに障害物を検出して、これら車両に対する道路区画線並びに障害物の相対位置情報をそれぞれ取得し、挙動設定手段が、経路算出手段にて算出した走行経路と相対位置取得手段にて取得した相対位置情報とに基づき、その走行経路における車両の挙動を表す走行計画を設定する。なお、補足説明しておくと、走行計画は、相対位置情報に応じて設定されることから、例えば車両の挙動によってその車両と障害物との相対関係が変化して両者の衝突する可能性が増すと、衝突を回避するための挙動(迂回や停止など)として再設定されることになる。
【0010】
さらに、本発明の自律走行制御装置においては、制御異常取得手段が、車両における制御系統の異常情報を取得する。また、モード選択手段が、制御異常取得手段にて取得した異常情報に基づいて、制御系統の異常部位が予め設定された特定部位の一つである場合、車両を緊急停止させる必要があると判定し、その車両における乗員の有無および載置物の種類のうち少なくとも一方の情報に基づいて、車両の内部の安全を優先する車内優先モード、または車両の外部の安全を優先する車外優先モードのいずれかを表す緊急停止モードを選択する。
【0011】
そして、緊急停止設定手段が、制御系統における異常部位以外の特定部位を使用可能部位として、その使用可能部位とモード選択手段により選択される緊急停止モードとに応じて予め設定された制御指針に従い、車両を停止させるように走行計画を挙動設定手段に設定させるように構成した。
【0012】
つまり、本発明の自律走行制御装置では、車両の周囲の状況に応じて走行計画を設定することを前提としつつ、制御系統の異常情報に基づいて車両を緊急停止させる必要があると判定した場合には、車両における正常な特定部位(使用可能部位)と予め選択される緊急停止モードとから一意に決まる制御指針に従って、車両を停止させるために走行計画を再設定する。
【0013】
しかも、本発明の自律走行制御装置では、緊急停止モードが、車両における乗員の有無および載置物の種類のうち少なくとも一方の情報に基づいて選択され、車内優先モードまたは車外優先モードのいずれかが走行計画の再設定に反映されるため、緊急時の車内の状況に応じて、車両の内部と外部とのいずれかの安全を的確に重視した制御を行うことができる。
【0014】
したがって、本発明の自律走行制御装置によれば、車両における緊急停止の要否および走行計画の再設定を迅速に行うことができ、なお且つ、車両の周囲の状況だけでなく、車両における特定部位の状態および車内の状況が走行計画に反映されることから、ひいては緊急時に車両の状態に応じてより迅速かつ的確な走行制御を行うことができる。
【0015】
ところで、緊急停止設定手段は、上記の制御指針に従って各種の処理を実行し得るが、請求項2に記載のように、車両のステアリングを制御する操舵制御装置が使用可能部位に含まれている場合、車両を停止させるための停止位置を目的地として走行経路を経路算出手段に算出させる停止位置設定処理を実行するようにしてもよい。
【0016】
このように構成された自律走行制御装置によれば、操舵制御装置を用いてステアリングを自動操作できることから、走行経路上の目的地としての停止位置まで車両を誘導することにより、比較的安全に車両を停止させることができる。
【0017】
また、詳細には、請求項3に記載のように、上記の特定部位として、操舵制御装置の他に、車両のエンジンを制御するエンジン制御装置、及び、車両のブレーキを制御するブレーキ制御装置が予め設定されており、なお且つ、上記の地図データに、停止位置としての候補場所が予め設定された安全レベルに対応づけて記憶されている構成では、以下のように処理を行ってもよい。
【0018】
即ち、停止位置設定処理は、操舵制御装置と共にエンジン制御装置またはブレーキ制御装置のいずれか一つの制御装置が使用可能部位に含まれている場合、車内優先モード時では、車両に搭載された燃料の残量に基づいてその車両の走行可能距離を算出し、地図データにおける上記の候補場所の中からその走行可能距離内で最も安全レベルの高い場所を停止位置として設定するようにしてもよい。
【0019】
このように構成された自律走行制御装置によれば、操舵制御装置を用いてステアリングを自動操作でき、なお且つ、エンジン制御装置またはブレーキ制御装置を用いて車両の自動制動を行えることから、車内優先モード時において、車両が走行可能な範囲内で最も安全な停止位置まで車両を誘導することにより、車両自体および車内の安全を最も重視して車両を停止させることができる。
【0020】
また、請求項4に記載のように、上記の地図データに少なくとも停止位置としての候補場所が記憶されている構成において、停止位置設定処理は、車外優先モード時では、地図データにおける上記の候補場所の中から現在地に最も近い場所を停止位置として設定するようにしてもよい。
【0021】
このように構成された自律走行制御装置によれば、車外優先モード時において、現在地から最も近い停止位置まで車両を誘導することで、制御系統のいずれかに異常を抱える車両の走行距離を短縮することができ、これにより、その車両によって周囲が危険に晒される可能性のある時間を減らすことができることから、周囲の安全を比較的重視しつつ、車両を停止させることができる。
【0022】
一方、請求項5に記載のように、操舵制御装置が異常部位である場合においては、緊急停止設定手段が、地図データおよび道路区画線の少なくとも一つの情報に基づいて、車両の操舵角が現状のまま推移した場合にその車両が移動可能な移動可能距離を算出し、その移動可能距離内で車両を停止させるための緊急停止処理を実行するようにしてもよい。
【0023】
このように構成された自律走行制御装置によれば、ステアリングが操作不能な状態である(あるいは操作不能な状態になる危険性がある)ことから、ステアリング操作の可否にかかわらず車両が移動可能な範囲内で制動制御することにより、確実に車両を停止させることができる。
【0024】
ところで、緊急停止設定手段は、上記の制御指針に従って各種の処理を実行し得るが、この制御指針は、請求項6に記載のように、車内優先モードの方が車外優先モードに比べて、緊急停止処理における車両の加速度の上限値が小さく設定されていてもよい。なお、補足説明しておくと、加速度の上限値とは、車両が減速する場合においては減速度の上限値を意味する概念として用いられる。
【0025】
このように構成された自律走行制御装置によれば、車内優先モード時において、車両にかかる加速度(減速度)を抑えることで、車内の安全をより重視して車両を停止させることができる。なお、移動可能距離内で車両を停止させるために比較的大きい加速度(減速度)を必要とする場合には、エアバッグなどの各種の安全装置を作動させるようにしてもよい。
【図面の簡単な説明】
【0026】
【図1】本発明が適用された自律走行制御装置を含む車載ネットワークシステムの概略構成を示すブロック図である。
【図2】本発明が適用された自律走行制御装置の構成を表す機能ブロック図である。
【図3】自律走行制御装置が実行する緊急走行制御処理の内容を詳細に示すフローチャートである。
【図4】緊急走行制御処理におけるモード選択処理の内容を詳細に示すフローチャートである。
【図5】緊急走行制御処理における停止位置設定処理の内容を詳細に示すフローチャートである。
【図6】緊急走行制御処理における緊急停止処理の内容を詳細に示すフローチャートである。
【図7】制御指針の概略を示すマトリックス図である。
【発明を実施するための形態】
【0027】
以下に、本発明の実施形態を図面と共に説明する。
[全体構成]
図1は、本発明が適用された自律走行制御装置(以下、自律走行ECU1という)を含む車載ネットワークシステム10の全体構成を示すブロック図である。
【0028】
図1に示すように、車載ネットワークシステム10は、車両に搭載されるシステムであって、その車両を目的地まで自律的に走行させるために、自律走行ECU1が、エンジンのスロットル開度,燃料噴射量,点火時期等を制御するエンジンECU2や、自動変速機を制御するトランスミッションECU3、車両における前後左右の車輪に対するブレーキを制御するブレーキECU4、車両のステアリングを制御するステアリングECU5などの電子制御装置に対して、各種の制御指令を送信可能に構成されている。
【0029】
そして、少なくともこれらECU2〜5が、自律走行ECU1と共に通信バス20を介して互いに通信可能に接続されており、その通信バス20を介して、自律走行ECU1からの制御指令としての走行計画(後述する)を受信すると、その受信データから特定される運転状態となるように、エンジン,自動変速機,ブレーキ,ステアリングを制御するように構成されている。なお、ブレーキECU4は、周知のABS機能や横滑り防止機能を実現するための制御処理を実行するようにも構成されている。
【0030】
また、各ECU2〜5は、それぞれエンジン,自動変速機,ブレーキ,ステアリングの作動状態に基づいて、これら制御対象機器を正常に制御できているか否かを診断する周知の自己診断機能を実現するための制御処理を実行するようにも構成されており、この処理により制御系統の異常を検出した場合には、その検出結果を表す情報(異常情報)を、通信バス20を介して自律走行ECU1に送信する。
【0031】
自律走行ECU1には、これらECU2〜5の他に、車両の位置情報を取得するための位置検出部11と、地図データを入力する地図データ入力部12と、車両に対する道路区画線並びに障害物の相対位置情報をそれぞれ取得するための監視センサ部13と、車両の現状の挙動を表す挙動情報を取得するための挙動センサ部14と、車内の状況を表す車内情報を取得するための車内センサ部15と、ユーザによる入力操作を受け付けるユーザ入力部16と、上述のブレーキとは独立して設けられ車両の駆動輪を緊急的にロックするための非常ロック装置17と、車両に搭載された燃料(例えばガソリン)の残量を検出してその検出結果を表す情報(燃料残量情報)を出力する燃料センサ部18とが接続されている。
【0032】
位置検出部11は、GPS用の人工衛星からの電波(GPS信号)を受信するGPS受信機の他に、車両に加えられる回転運動の大きさを検出するジャイロスコープや、3軸方向の加速度等から車両の走行距離を検出する加速度センサ、地磁気から車両の進行方向を検出する地磁気センサ等を備え、GPS信号を受信できない状況であってもいわゆる自律航法により車両の現在地を算出するように構成されている。
【0033】
地図データ入力部12は、ハードディスク等の書き込み可能な記憶媒体に記憶されている地図データを入力するための装置であり、図示しない無線通信機により取得する最新の道路情報や交通情報といった各種の更新情報を地図データと対応づけて記憶すると共に、地図データをバージョンアップして最新の状態に維持するように構成されている。また、地図データには、道路形状が詳細に記憶されており、なお且つ、車両を緊急停止させる必要がある場合の停止位置としての候補場所が、道路形状や交通量、交通機関へのアクセスの容易さ等に基づいて予め設定された安全レベルに対応づけて記憶されている。
【0034】
監視センサ部13は、車両の進行方向における道路区画線並びに障害物を少なくとも検出するために、車両の前後左右各部に設置されたレーダセンサ及び画像センサを備えて構成される。このうち、レーダセンサは、ミリ波,レーザ光,および超音波の少なくともいずれかの電波を用いて送受信することで、所定検出範囲内に位置する障害物を検出し、車両に対するその障害物の相対位置などを表すターゲット情報を作成する。一方、画像センサは、車両の進行方向に位置する走行道路を含む周囲画像を撮像し、その走行道路における道路区画線を検出すると共に、周囲画像に基づいてターゲット情報に含まれている障害物の種類(他車両や建物、通行者など)を特定し、道路区画線並びに特定された障害物の相対位置を表す情報(相対位置情報)を出力する。
【0035】
挙動センサ部14は、位置検出部11にて用いられる各種センサを利用すると共に、車両の走行速度(車速)を検出する車速センサや、車両の直進方向に対する操舵角を検出する操舵角センサ等の検出値に基づく情報(挙動情報)を出力する。
【0036】
車内センサ部15は、座席にかかる圧力を検出する圧力センサや、車内画像を撮像する車内カメラ等を備え、例えば圧力センサの検出値が所定値を上回る場合に、乗員が存在すると判断したり、車内画像に基づいて乗員の数や構成を認識したり、車両における載置物の有無を検出し、これらの結果を示す情報(車内情報)を出力する。
【0037】
ユーザ入力部16は、車両の走行前にユーザによって各種の情報を入力するための装置であって、例えば目的地や載置物の種類などを設定するための情報を受け付けるための画面をディスプレイ等に表示させると共に、ユーザによって入力された情報(設定情報)を出力するように構成されている。
【0038】
[自律走行ECUの構成]
次に、図2は、本発明が適用された自律走行制御装置としての自律走行ECU1の構成を表す機能ブロック図である。
【0039】
図2に示すように、自律走行ECU1は、現在地から予め設定された目的地までの車両の走行経路を算出する経路算出部21と、経路算出部21にて算出された走行経路における車両の挙動を表す走行計画を設定する挙動設定部22と、緊急時に走行計画を再設定するための制御を行う緊急走行制御部23とを備えている。
【0040】
なお、経路算出部21,挙動設定部22,緊急走行制御部23は、いずれも、CPU,ROM,RAM,EEPROM,DSP(デジタルシグナルプロセッサ)等を備えた周知のマイクロコンピュータ上で周期的に実行される処理として実現される。
【0041】
経路算出部21は、位置検出部11にて取得した位置情報と、地図データ入力部12から入力される地図データとに基づき、周知のナビゲーション技術を用いて現在地から目的地までの最適な走行経路を自動的に求める経路計算を行い、計算結果を挙動設定部22に出力する。そして、緊急走行制御部23から後述する停止位置を指定する情報が入力された場合には、その停止位置を目的地として走行経路を再計算するように構成されている。
【0042】
挙動設定部22は、経路算出部21にて算出した走行経路と、監視センサ部13にて取得した相対位置情報とに基づき、周知のオートクルーズ機能やレーンキーピング機能を実現するための制御処理を実行すると共に、挙動センサ部14にて取得した挙動情報に基づき、走行経路における車両の挙動(車速,加速度,操舵角など)を表す最適な走行計画を設定する。例えば、車速が所定値を上回る状態ではオートクルーズ機能により先行車両に追従し、車速が所定値を下回ると、相対位置情報に基づいて隣接車線(追越車線など)に車線変更して走行する場合の車速を推定し、その変更前後の車速を比較することにより、最適な走行車線を選択する処理を実行し、その処理結果を走行計画に反映させる。
【0043】
また、挙動設定部22は、上記の挙動情報の連続的な変化から障害物(例えば他車両)の相対速度、及び、相対位置からの移動方向を算出し、上記の挙動情報に基づき、車速および操舵角が現状のまま推移した場合に予測される車両の予測走行軌跡を求め、その軌跡上において障害物と車両とが衝突する可能性(本実施形態では、TTCに基づく衝突可能性)の有無を判定し、判定結果に応じて衝突を回避するために走行計画を再設定する。また、障害物の挙動によりTTCが所定の閾値を下回る場合には、車両を緊急停止させるために走行計画を再設定する。なお、補足説明しておくと、TTCとは、車両に対する障害物の相対距離を相対速度で除算することにより得られる値であり、現在時から仮の衝突時までの余裕時間(いわゆる衝突余裕時間)を表す概念である。
【0044】
さらに、挙動設定部22は、緊急走行制御部23から後述する制御指針を指定する情報が入力された場合には、その制御指針に従って車両を停止させるための走行計画を再設定するように構成されている。なお、挙動設定部22にて設定された走行計画は、自律走行ECU1による制御指令として、通信バス20を介して随時、他のECU2〜5に送信され、これらECU2〜5によって、各制御対象機器(エンジン,自動変速機,ブレーキ,ステアリング)が制御されることにより、当該走行計画に従った車両の走行制御が実現される。
【0045】
[緊急走行制御処理]
次に、緊急走行制御部23の制御処理(緊急走行制御処理)を、図3のフローチャートに沿って詳しく説明する。なお、本処理は、車両のイグニションキー(IGキー)がオンされると起動し、IGキーがオフされると終了する。
【0046】
まず、本処理が開始されると、S110では、通信バス20を介していずれかのECU2〜5から異常情報を受信したか否かを判断し、ここで肯定判断した場合にはS120に移行し、否定判断した場合には、異常情報を受信するまで待機する。
【0047】
S120では、S110で受信した異常情報に基づいて、制御系統の異常部位が予め設定された特定部位の一つであるか否かを判定する異常判定処理を行い、S130に移行する。なお、本実施形態では、この特定部位として、エンジンECU2、ブレーキECU4、およびステアリングECU5が設定されている。また、異常判定処理では、制御系統の異常レベルが予め設定された閾値レベルを上回る場合に該当する制御系統の部位を異常部位として扱うようにしている。
【0048】
S130では、S120における異常判定処理の処理結果に基づいて、車両を緊急停止させる必要があるか否か判断し、ここで、制御系統の異常部位が特定部位の一つであることを処理結果が示す場合(即ち、肯定判断した場合)、S140に移行し、一方、否定判断した場合にはS110に移行する。
【0049】
S140では、車内センサ部15から入力された車内情報、及び、ユーザ入力部16にて設定された設定情報に基づいて、以下の車内優先モードまたは車外優先モードのいずれかを表す緊急停止モードを選択するモード選択処理を実行する。なお、図4は、モード選択処理の詳細を示すフローチャートである。
【0050】
図4に示すように、モード選択処理では、車内センサ部15から入力された車内情報に基づいて、車両に乗員が存在すると判定した場合には(S210;YES)、車両の内部の安全を優先する車内優先モードを設定し(S230)、本処理を終了する。また、車両に乗員が存在しない(非存在である)と判定した場合であっても(S210;NO)、ユーザ入力部16にて設定された設定情報に基づいて、載置物の種類が危険物であると判定した場合(S220;YES)にも車内優先モードを設定し、本処理を終了する。一方、車両に乗員および危険物が共に存在しない(非存在である)と判定した場合には(S220;NO)、車両の外部の安全を優先する車外優先モードを設定し(S240)、本処理を終了する。
【0051】
図3に戻り、S150では、予め用意された複数の制御指針のうち、S120における異常判定処理、及びS140におけるモード選択処理の処理結果に基づいて一意に決定される制御指針を抽出する。なお、制御指針は、車両を緊急停止させる必要がある場合に、挙動設定部22に走行計画を再設定させるための必要最小限の指針であり、制御系統における異常部位以外の特定部位(以下、使用可能部位という)と、モード選択処理により設定される緊急停止モードとに対応づけて予め複数用意されている。
【0052】
次に、S160以降では、S150にて抽出された制御指針に従って、車両を停止させるように走行計画を挙動設定部22に再設定させる(場合によっては、走行経路を経路算出部21に再計算させる)処理を行う。
【0053】
具体的には、S120における異常判定処理の処理結果に基づいて、ステアリングECU5が制御系統の異常部位に含まれている(換言すれば、ステアリングECU5が使用可能部位に含まれていない)か否かを判断する(S160)。ここで使用可能部位に含まれていると判断した場合(即ち、否定判断した場合)には(S160;NO)、車両を停止させるための停止位置を目的地として走行経路を経路算出部21に再計算させるための停止位置設定処理を実行し(S170)、本処理を終了する。一方、ステアリングECU5が異常部位に含まれていると判断した場合(即ち、肯定判断した場合)には(S160;YES)、走行経路の再計算を経ずに、車両を比較的早期に停止させるように走行計画を挙動設定部22に再設定させるための緊急停止処理を実行し(S180)、本処理を終了する。
【0054】
[停止位置設定処理]
次に、緊急走行制御処理のS170における停止位置設定処理を、図4のフローチャートに沿って詳しく説明する。
【0055】
まず、本処理が開始されると、S310では、緊急走行制御処理のS140におけるモード選択処理で設定された緊急停止モードが車内優先モードであるか否かを判断し、ここで肯定判断した場合にはS320に移行し、否定判断した場合にはS350に移行する。
【0056】
S320では、緊急走行制御処理のS120における異常判定処理の処理結果に基づいて、エンジンECU2とブレーキECU4とが共に制御系統の異常部位に含まれている(換言すれば、ステアリングECU5だけが使用可能部位である)か否かを判断する。そして、ここで肯定判断した場合にはS350に移行し、一方、エンジンECU2またはブレーキECU4のいずれか一つの電子制御装置が使用可能部位に含まれている場合(即ち、否定判断した場合)には、S330に移行する。
【0057】
S330では、燃料センサ部18から入力された燃料残量情報に基づいて、車両に搭載された燃料の残量を消費することによって車両が走行可能な距離(走行可能距離)を算出し、S340に移行する。
【0058】
S340では、S330で算出した走行可能距離に基づいて、地図データ入力部12から入力された地図データを参照し、その地図データにおける停止位置としての候補場所のうち、走行可能距離内で最も安全レベルの高い場所(複数存在する場合にはその中で最も近い場所)を停止位置に指定し、その停止位置を指定する情報を緊急走行制御部23に出力して、本処理を終了する。
【0059】
つまり、ステアリングECU5を用いてステアリングを自動操舵でき、なお且つ、エンジンECU2またはブレーキECU4を用いて車両の自動制動を行えることから、車内優先モードの場合に、車両が走行可能な範囲内で最も安全な停止位置まで車両を誘導することにより、車両自体および車内の安全を最も重視して車両を停止させるようにしている。
【0060】
一方、S350では、位置検出部11にて取得した位置情報に基づいて、地図データ入力部12から入力された地図データを参照し、その地図データにおける停止位置としての候補場所の中から車両の現在地に最も近い場所を停止位置に指定し、その停止位置を指定する情報を緊急走行制御部23に出力して、本処理を終了する。
【0061】
つまり、車外優先モードの場合には、エンジンECU2およびブレーキECU4の少なくとも一方に異常を抱える車両の走行距離を短縮することで、その車両によって周囲が危険に晒される可能性のある時間を減らすために、現在地から最も近い停止位置まで車両を誘導することにより、周囲の安全を比較的重視しつつ車両を停止させるようにしている。
【0062】
[緊急停止処理]
次に、緊急走行制御処理のS180における緊急停止処理を、図5のフローチャートに沿って詳しく説明する。
【0063】
まず、本処理が開始されると、S410では、挙動センサ部14にて取得した挙動情報と、挙動設定部22にて算出される予測走行軌跡とに基づいて、地図データ入力部12から入力された地図データを参照し、ステアリングを操作することなく車速(及び加速度)だけを制御することにより車両が移動可能な最大距離(移動可能距離)を算出する。
【0064】
続くS420では、緊急走行制御処理のS140におけるモード選択処理で設定された緊急停止モードが車内優先モードであるか否かを判断し、ここで肯定判断した場合にはS430に移行し、否定判断した場合にはS460に移行する。
【0065】
S430では、インテリアパーツとしての周知のエアバッグや、エクステリアパーツとしての周知のポップアップフード、アクティブグリル、フードエアバッグ等といった保護装置を展開可能な状態に駆動することにより、衝突時にこれら保護装置を迅速に作動させるための準備を行う。なお、補足説明しておくと、例えば、ポップアップフードは、ボンネットフードの後方側を持ち上げるように作動し、エンジン等との間に空間を形成する装置であり、アクティブグリルは、左右ヘッドライトの間に設置されたラジエータグリルを前方側に突き出すように作動し、ラジエータ等との間に空間を形成する装置である。つまり、ポップアップフード及びアクティブグリルは、硬質のエンジン及びラジエータ等と障害物(通行者や他車両等)との衝撃を緩和させるために設けられている。
【0066】
続くS440では、挙動設定部22にて算出されたTTCが所定の閾値時間を下回るか否か(換言すれば、予測走行軌跡上における所定距離内に障害物が存在するか否か)を判断し、ここで肯定判断した場合にはS450に移行し、否定判断した場合にはS460に移行する。
【0067】
S450では、車両における加速度の上限値(加速上限値)を、制御指針にて予め規定された規定値よりも小さく設定する制約を付加して、上述の移動可能距離内で車両を緊急停止させるように走行計画を再設定させるための制御指針を、挙動設定部22に出力し、本処理を終了する。
【0068】
一方、S440で否定判断した場合に移行するS460では、制御指針にて予め規定された規定値よりも加速上限値を大きく設定する制約を付加して、上述の移動可能距離内で車両を緊急停止させるように走行計画を再設定させるための制御指針を、挙動設定部22に出力し、本処理を終了する。ちなみに、S420で否定判断した場合(車外優先モードの場合)に移行するS460では、上述の制約を付加することなく、制御指針にて予め規定された加速上限値の規定値を用いるようにする。
【0069】
なお、制御指針では、車両に乗員または危険物が存在する場合に、その車両にかかる加速度(減速度)を抑えることで、車内の安全をより重視して車両を停止させるために、車内優先モードの方が車外優先モードに比べて、加速上限値の規定値が小さく規定されている。
【0070】
[動作例]
次に、図7は、制御指針の概略を示すマトリックス図であり、この図を用いて動作例を説明する。
【0071】
図7に示すように、制御指針は、ステアリングの自動操舵に関する制御系統が正常であるか否か(ステアリングECU5が使用可能部位に含まれているか否か)によって大別され、ステアリング正常時には停止位置設定処理を実行し、ステアリング異常時には緊急停止処理を実行するように定めている。
【0072】
また、制御指針は、エンジンの自動運転に関する制御系統、及び、ブレーキの自動制動に関する制御系統が正常であるか否か(エンジンECU2,ブレーキECU4が使用可能部位に含まれているか否か)によって、車両の制動制御や速度制御の方法を詳細に規定している。
【0073】
具体的には、自律走行ECU1では、制御指針に従って、ステアリング正常時においては、以下の(1)〜(3)によって、車両を停止させることにしている。
(1)エンジン制御が正常であり、ブレーキ制御に異常がある場合、エンジンブレーキ(及び自動変速機によるシフトダウン)を用いて制動制御を行うことにより、車両を停止位置まで誘導する(最終的にはエンジンブレーキと非常ロック装置17とを併用して停止させる)。なお、車内優先モード時には、車外優先モード時以上に安全レベルが高い候補場所を停止位置とする。
【0074】
(2)エンジン制御に異常があり、ブレーキ制御が正常である場合、エンジンが一定の運転状態下にあることを前提とし、ブレーキを用いて速度制御(減速制御)を行うことにより、車両を停止位置まで誘導する(最終的にはブレーキによって停止させる)。なお、車内優先モード時には、車外優先モード時以上に安全レベルが高い候補場所を停止位置とする。
【0075】
(3)エンジン制御、ブレーキ制御が共に異常がある場合、非常ロック装置17を用いて駆動輪をロック・アンロックする制動制御を行うことにより、車両を停止位置まで誘導する(最終的には非常ロック装置17によって停止させる)。なお、緊急停止モードの設定内容にかかわらず、車両の現在地から所定距離(例えば数十メートル)以内の候補場所を停止位置とする。
【0076】
また、自律走行ECU1では、制御指針に従って、ステアリング異常時においては、以下の(4)〜(7)によって、車両を停止させることにしている。なお、上述のように、車内優先モード時には、車外優先モード時と比較して車両の加速度(減速度)が抑制されると共に、万が一の衝突等により所定の衝突加速度に達すると、障害物や車内情報(及び設定情報)に応じて該当する安全装置を作動させることにしている。
【0077】
(4)エンジン制御、ブレーキ制御が共に正常である場合、エンジンブレーキ(及び自動変速機によるシフトダウン)とブレーキとを併用して制動制御を行うことにより、車両を緊急停止させる。
【0078】
(5)エンジン制御が正常であり、ブレーキ制御に異常がある場合、エンジンブレーキ(及び自動変速機によるシフトダウン)を用いて制動制御を行うことにより、車両を緊急停止させる(最終的には非常ロック装置17によって停止させる)。
【0079】
(6)エンジン制御に異常があり、ブレーキ制御が正常である場合、ブレーキを用いて制動制御を行うことにより、車両を緊急停止させる。
(7)エンジン制御、ブレーキ制御が共に異常がある場合、非常ロック装置17を用いて駆動輪をロック・アンロックする制動制御を行うことにより、車両を緊急停止させる。
【0080】
[本実施形態と特許請求の範囲との対応]
なお、本実施形態において、位置検出部11(詳細には位置情報を取得する処理)が車両位置取得手段、経路算出部21が経路算出手段、監視センサ部13(詳細には相対位置情報を取得する処理)が相対位置取得手段、挙動設定部22が挙動設定手段、ECU2〜5およびS110が制御異常取得手段、S120〜S140がモード選択手段、S150〜S180が緊急停止設定手段に相当する。
【0081】
[本実施形態の効果]
以上説明したように、本実施形態の自律走行ECU1では、車両の周囲の状況に応じて走行計画を設定すると共に、他のECU2〜5からの異常情報に基づいて車両を緊急停止させる必要があると判定した場合には、使用可能部位と緊急停止モードとから一意に決まる制御指針に従って、車両を停止させるために走行計画を再設定する。
【0082】
しかも、自律走行ECU1では、車両における乗員および危険物の有無の少なくとも一方の情報に基づいて緊急停止モードを選択し、車内優先モードまたは車外優先モードのいずれかを走行計画の再設定に反映させることにより、緊急時の車内の状況に応じて、車両と車両の周囲とのいずれかの安全を的確に重視した制御を行うことが可能となる。
【0083】
したがって、本実施形態の自律走行ECU1によれば、車両における緊急停止の要否および走行計画の再設定を迅速に行うことができ、なお且つ、車両の周囲だけでなく、車両における特定部位の状態および車内の状況が走行計画に反映されることから、ひいては緊急時に車両の状態に応じてより迅速かつ的確な走行制御を行うことができる。
【0084】
また、自律走行ECU1が実行する停止位置設定処理(ステアリング制御が正常であることを前提として起動される処理)では、車内優先モード時においても、エンジン制御、ブレーキ制御が共に異常があれば、地図データにおける現在地から最も近い候補場所を停止位置として設定する。このため、単に緊急停止モードの設定内容に応じて停止位置の設定方法を変更する場合と比べて、より車両の状態に応じた走行制御(停止制御)を行うことができる。
【0085】
さらに、自律走行ECU1が実行する緊急停止処理(ステアリング制御に異常があることを前提として起動される処理)では、車内優先モード時においても、TTCが閾値時間を下回れば、規定値に比べて加速上限値を大きく設定する。このため、単に緊急停止モードの設定内容に応じて加速上限値の規定値を用いる場合と比べて、より車両の周囲の状況に応じた走行制御(緊急停止)を行うことができる。
【0086】
[他の実施形態]
以上、本発明の実施形態について説明したが、本発明は上記実施形態に限定されるものではなく、本発明の要旨を逸脱しない範囲において、様々な態様にて実施することが可能である。
【0087】
例えば、上記実施形態の緊急停止処理では、車内優先モード時にTTCを用いた閾値判定により、加速上限値の規定値を可変設定しているが、これに限らず、TTCにかかわらず、制御指針に予め設定された規定値を用いてもよい。また、加速上限値の規定値を可変設定する場合であっても、例えば乗員の構成(子供や大人の数)に応じて設定(子供が乗っている場合には極力小さく設定)してもよい。
【0088】
また、上記実施形態では、乗員の数や構成を車内画像に基づいて認識している(この種の情報が車内情報に含まれている)が、これに限定されずに、例えばユーザ入力部16を介してユーザにより設定情報としてこの種の情報を予め入力する構成でもよい。逆に、危険物の有無を、車内画像に基づいて例えば載置物に貼られたシールの図柄や文字から認識するようにしてもよい。
【0089】
また、上記実施形態の制御指針では、ステアリング制御が正常であるか否かによって、停止位置設定処理または緊急停止処理のいずれかを実行するように規定されているが、これに限定されるものではなく、例えばステアリング正常時においてもエンジン制御、ブレーキ制御が共に異常があれば、緊急停止処理を実行するように例外規定を設けてもよい。つまり、上記実施形態の制御指針は、あくまでも一例であり、少なくとも使用可能部位と緊急停止モードとに応じて予め設定されていればよい。また、トランスミッションECU3についても特定部位に設定しておいてもよい。
【0090】
なお、上記実施形態の自律走行ECU1は、乗員の有無にかかわらず走行計画に従って車両を自動走行させることを念頭に置いているが、運転者の操作をアシストする従来の自動走行制御装置に適用してもよい。
【符号の説明】
【0091】
1…自律走行ECU、2…エンジンECU、3…トランスミッションECU、4…ブレーキECU、5…ステアリングECU、10…車載ネットワークシステム、11…位置検出部、12…地図データ入力部、13…監視センサ部、14…挙動センサ部、15…車内センサ部、16…ユーザ入力部、17…非常ロック装置、18…燃料センサ部、20…通信バス、21…経路算出部、22…挙動設定部、23…緊急走行制御部。
【特許請求の範囲】
【請求項1】
車両の位置情報を取得する車両位置取得手段と、
前記車両位置取得手段にて取得した位置情報と予め用意された地図データとに基づき、現在地から予め設定された目的地までの前記車両の走行経路を算出する経路算出手段と、
前記車両の進行方向における道路区画線並びに障害物を検出し、該車両に対する該道路区画線並びに該障害物の相対位置情報をそれぞれ取得する相対位置取得手段と、
前記経路算出手段にて算出した走行経路と前記相対位置取得手段にて取得した相対位置情報とに基づき、該走行経路における前記車両の挙動を表す走行計画を設定する挙動設定手段と、
を備え、
前記走行計画に従って前記車両の走行制御を行う自律走行制御装置において、
前記車両における制御系統の異常情報を取得する制御異常取得手段と、
前記制御異常取得手段にて取得した異常情報に基づいて、前記制御系統の異常部位が予め設定された特定部位の一つである場合、前記車両を緊急停止させる必要があると判定し、該車両における乗員の有無および載置物の種類のうち少なくとも一方の情報に基づいて、該車両の内部の安全を優先する車内優先モード、または該車両の外部の安全を優先する車外優先モードのいずれかを表す緊急停止モードを選択するモード選択手段と、
前記制御系統における前記異常部位以外の前記特定部位を使用可能部位として、該使用可能部位と前記モード選択手段により選択される緊急停止モードとに応じて予め設定された制御指針に従い、前記車両を停止させるように前記走行計画を前記挙動設定手段に設定させる緊急停止設定手段と、
を備えることを特徴とする自律走行制御装置。
【請求項2】
前記緊急停止設定手段は、前記車両のステアリングを制御する操舵制御装置が前記使用可能部位に含まれている場合、前記車両を停止させるための停止位置を前記目的地として前記走行経路を前記経路算出手段に算出させる停止位置設定処理を実行することを特徴とする請求項1に記載の自律走行制御装置。
【請求項3】
前記特定部位には、前記操舵制御装置の他に、前記車両のエンジンを制御するエンジン制御装置、及び該車両のブレーキを制御するブレーキ制御装置が設定されており、
前記地図データには、前記停止位置としての候補場所が予め設定された安全レベルに対応づけて記憶されており、
前記停止位置設定処理は、前記操舵制御装置と共に前記エンジン制御装置または前記ブレーキ制御装置のいずれか一つの制御装置が前記使用可能部位に含まれている場合、前記車内優先モード時では、該車両に搭載された燃料の残量に基づいて該車両の走行可能距離を算出し、前記地図データにおける前記候補場所の中から該走行可能距離内で最も安全レベルの高い場所を前記停止位置として設定することを特徴とする請求項2に記載の自律走行制御装置。
【請求項4】
前記地図データには、前記停止位置としての候補場所が記憶されており、
前記停止位置設定処理は、前記車外優先モード時では、前記地図データにおける前記候補場所の中から前記現在地に最も近い場所を前記停止位置として設定することを特徴とする請求項2または請求項3に記載の自律走行制御装置。
【請求項5】
前記緊急停止設定手段は、前記操舵制御装置が前記異常部位である場合、前記地図データおよび前記道路区画線の少なくとも一つの情報に基づいて、前記車両の操舵角が現状のまま推移した場合に該車両が移動可能な移動可能距離を算出し、該移動可能距離内で前記車両を停止させるための緊急停止処理を実行することを特徴とする請求項2ないし請求項4のいずれか1項に記載の自律走行制御装置。
【請求項6】
前記制御指針は、前記車内優先モードの方が前記車外優先モードに比べて、前記緊急停止処理における前記車両の加速度の上限値が小さく設定されていることを特徴とする請求項5に記載の自律走行制御装置。
【請求項1】
車両の位置情報を取得する車両位置取得手段と、
前記車両位置取得手段にて取得した位置情報と予め用意された地図データとに基づき、現在地から予め設定された目的地までの前記車両の走行経路を算出する経路算出手段と、
前記車両の進行方向における道路区画線並びに障害物を検出し、該車両に対する該道路区画線並びに該障害物の相対位置情報をそれぞれ取得する相対位置取得手段と、
前記経路算出手段にて算出した走行経路と前記相対位置取得手段にて取得した相対位置情報とに基づき、該走行経路における前記車両の挙動を表す走行計画を設定する挙動設定手段と、
を備え、
前記走行計画に従って前記車両の走行制御を行う自律走行制御装置において、
前記車両における制御系統の異常情報を取得する制御異常取得手段と、
前記制御異常取得手段にて取得した異常情報に基づいて、前記制御系統の異常部位が予め設定された特定部位の一つである場合、前記車両を緊急停止させる必要があると判定し、該車両における乗員の有無および載置物の種類のうち少なくとも一方の情報に基づいて、該車両の内部の安全を優先する車内優先モード、または該車両の外部の安全を優先する車外優先モードのいずれかを表す緊急停止モードを選択するモード選択手段と、
前記制御系統における前記異常部位以外の前記特定部位を使用可能部位として、該使用可能部位と前記モード選択手段により選択される緊急停止モードとに応じて予め設定された制御指針に従い、前記車両を停止させるように前記走行計画を前記挙動設定手段に設定させる緊急停止設定手段と、
を備えることを特徴とする自律走行制御装置。
【請求項2】
前記緊急停止設定手段は、前記車両のステアリングを制御する操舵制御装置が前記使用可能部位に含まれている場合、前記車両を停止させるための停止位置を前記目的地として前記走行経路を前記経路算出手段に算出させる停止位置設定処理を実行することを特徴とする請求項1に記載の自律走行制御装置。
【請求項3】
前記特定部位には、前記操舵制御装置の他に、前記車両のエンジンを制御するエンジン制御装置、及び該車両のブレーキを制御するブレーキ制御装置が設定されており、
前記地図データには、前記停止位置としての候補場所が予め設定された安全レベルに対応づけて記憶されており、
前記停止位置設定処理は、前記操舵制御装置と共に前記エンジン制御装置または前記ブレーキ制御装置のいずれか一つの制御装置が前記使用可能部位に含まれている場合、前記車内優先モード時では、該車両に搭載された燃料の残量に基づいて該車両の走行可能距離を算出し、前記地図データにおける前記候補場所の中から該走行可能距離内で最も安全レベルの高い場所を前記停止位置として設定することを特徴とする請求項2に記載の自律走行制御装置。
【請求項4】
前記地図データには、前記停止位置としての候補場所が記憶されており、
前記停止位置設定処理は、前記車外優先モード時では、前記地図データにおける前記候補場所の中から前記現在地に最も近い場所を前記停止位置として設定することを特徴とする請求項2または請求項3に記載の自律走行制御装置。
【請求項5】
前記緊急停止設定手段は、前記操舵制御装置が前記異常部位である場合、前記地図データおよび前記道路区画線の少なくとも一つの情報に基づいて、前記車両の操舵角が現状のまま推移した場合に該車両が移動可能な移動可能距離を算出し、該移動可能距離内で前記車両を停止させるための緊急停止処理を実行することを特徴とする請求項2ないし請求項4のいずれか1項に記載の自律走行制御装置。
【請求項6】
前記制御指針は、前記車内優先モードの方が前記車外優先モードに比べて、前記緊急停止処理における前記車両の加速度の上限値が小さく設定されていることを特徴とする請求項5に記載の自律走行制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2011−240816(P2011−240816A)
【公開日】平成23年12月1日(2011.12.1)
【国際特許分類】
【出願番号】特願2010−114494(P2010−114494)
【出願日】平成22年5月18日(2010.5.18)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成23年12月1日(2011.12.1)
【国際特許分類】
【出願日】平成22年5月18日(2010.5.18)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]