
自走式エレクタの位置制御方法及び位置制御装置
【課題】既設セグメントに過大な荷重が作用するのを防ぐことができると共に、既設セグメントに対してエレクタ部を精度良く位置合わせすることができる自走式エレクタの位置制御方法と位置制御装置を提供する。
【解決手段】エレクタ部の中心が計画線8上に位置され、かつ、エレクタ部が計画線8の接線方向を向くように可動支持部を制御する自走式エレクタの位置制御方法であって、エレクタ部近傍の本体に複数のマークを左右に離間して設け、後方からマーク39の位置を測量すると共に本体の傾斜角度を測定し、これら測量情報、傾斜情報、上記本体の寸法情報及び上記マーク39の取付位置情報からマーク39が移動されるべき理想点を算出すると共に理想点に対するマーク位置のずれを算出し、これらずれが所定の許容範囲内に収まるように可動支持部で本体の前後の2ヶ所を移動させるものである。
【解決手段】エレクタ部の中心が計画線8上に位置され、かつ、エレクタ部が計画線8の接線方向を向くように可動支持部を制御する自走式エレクタの位置制御方法であって、エレクタ部近傍の本体に複数のマークを左右に離間して設け、後方からマーク39の位置を測量すると共に本体の傾斜角度を測定し、これら測量情報、傾斜情報、上記本体の寸法情報及び上記マーク39の取付位置情報からマーク39が移動されるべき理想点を算出すると共に理想点に対するマーク位置のずれを算出し、これらずれが所定の許容範囲内に収まるように可動支持部で本体の前後の2ヶ所を移動させるものである。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、トンネルの構築が計画される計画線上に掘削されたトンネル穴内を走行しつつトンネル穴の内壁に沿ってセグメントを組み立てる自走式エレクタの位置制御方法及び位置制御装置に関するものである。
【背景技術】
【0002】
自走式エレクタとしては、特許文献1に記載のものが知られている。この自走式エレクタは、既設セグメント上を走行する台車部と台車部に走行方向前方に延びて設けられセグメントを組み立てるエレクタ部とを備える。
【0003】
この自走式エレクタは、手掘り或いは機械掘りにより形成したトンネル穴内にセグメントを組み立てることのできる画期的なものであったが、装置全体の荷重が既設セグメントに作用し、既設セグメントの耐久性を低下させる虞があった。このため、かかる課題を解決するために新たな構造の自走式エレクタを現在開発中(未公開)である。
【0004】
この開発中の自走式エレクタは、掘削した地山(トンネル穴内)に敷設されたレール上を走行する台車と、この台車上に設けられエレクタ部を有する本体とから主に構成され、既設セグメント前方のレール上を走行することにより既設セグメントに過大な荷重を作用させないようになっている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−223260号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、この自走式エレクタは、地山に敷設されたレール上を走行するものであるため、レールを精度良く敷設することが困難であり、エレクタ部をトンネルの中心に位置合わせするのが困難であるという課題があった。
【0007】
また、カーブ施工時には、台車が既設セグメントより前方にあるため、既設セグメントの向きとエレクタ部の向きとが一致せず、既設セグメントに対するエレクタ部のずれ量が所定の許容範囲(約50mm)内に収まらない可能性があるという課題があった。
【0008】
そこで、本発明の目的は、上記課題を解決し、既設セグメントに過大な荷重が作用するのを防ぐことができると共に、既設セグメントに対してエレクタ部を精度良く位置合わせすることができる自走式エレクタの位置制御方法と位置制御装置を提供することにある。
【課題を解決するための手段】
【0009】
上記課題を解決するために本発明は、トンネルの構築が計画される計画線上に掘削されたトンネル穴内にレールを敷設し、該レール上に台車を前後走行可能に設置し、該台車上に、前後に延び、かつ、後部にセグメント組立用のエレクタ部を有する本体を載置すると共に、該本体の少なくとも前後に離間する2ヶ所を上下左右に位置調節可能に支持する可動支持部を設け、上記エレクタ部の中心が上記計画線上に位置され、かつ、上記エレクタ部が上記計画線の接線方向を向くように上記可動支持部を制御する自走式エレクタの位置制御方法であって、上記エレクタ部近傍の本体に複数のマークを左右に離間して設け、該マークより後方のトンネル内からマークの位置を測量すると共に上記本体の傾斜角度を測定し、これら測量情報、傾斜情報、上記本体の寸法情報及び上記マークの取付位置情報から上記計画線上に上記エレクタ部の中心を位置させると共に上記エレクタ部の向きを上記計画線の接線方向に向けるために上記マークが移動されるべき理想点を算出すると共に該理想点に対するマーク位置のずれを算出し、これらずれが所定の許容範囲内に収まるように上記可動支持部で上記本体の前後の2ヶ所を移動させるものである。
【0010】
上記ずれが所定の許容範囲内に収まるように上記可動支持部で上記本体を移動させるとき、上記測量情報、傾斜情報、上記本体の寸法情報及び上記マークの取付位置情報から上記可動支持部で支持される本体の支持位置を算出すると共に、該支持位置と前後方向の位置が同じで、かつ、左右に離間された2点の仮想計測点を算出し、上記計画線上に上記エレクタ部の中心を位置させると共に上記エレクタ部の向きを上記計画線の接線方向に向けるために上記仮想計測点が移動されるべき仮想理想点を算出し、該仮想理想点と上記仮想計測点とのずれを減少させるように上記可動支持部で上記支持位置を移動させるとよい。
【0011】
上記仮想理想点と上記仮想計測点とのずれを減少させるように上記支持位置を移動させるとき、ずれ量に100パーセントより小さな正のゲイン値を掛け、複数回に分けて上記支持位置を移動させるとよい。
【0012】
上記可動支持部が、上記台車に前後左右に離間して設けられ、上記本体を昇降させる垂直ジャッキを有すると共に該垂直ジャッキを左右にスライドさせる水平ジャッキを有する水平・垂直調整装置からなり、上記本体を移動させるとき、上記水平・垂直調整装置で上記本体の前後左右の支持位置をそれぞれ同時に上下左右に移動させるとよい。
【0013】
また、トンネルの構築が計画される計画線上に掘削されたトンネル穴内にレールを敷設し、該レール上に台車を前後走行可能に設置し、該台車上に、前後に延び、かつ、後部にセグメント組立用のエレクタ部を有する本体を載置すると共に、該本体の少なくとも前後に離間する2ヶ所を上下左右に位置調節可能に支持する可動支持部を設け、上記エレクタ部の中心が上記計画線上に位置され、かつ、上記エレクタ部が上記計画線の接線方向を向くように上記可動支持部を制御する自走式エレクタの位置制御装置であって、上記エレクタ部近傍の本体に左右に離間して設けられた複数のマークと、該マークより後方のトンネル内に設けられマークの位置を測量する測量器と、上記本体に設けられ本体の傾斜角度を測定する傾斜角検出器と、該傾斜角検出器から得られる傾斜情報、上記測量器から得られる測量情報、上記本体の寸法情報及び上記マークの取付位置情報から上記計画線上に上記エレクタ部の中心を位置させると共に上記エレクタ部の向きを上記計画線の接線方向に向けるために上記マークが移動されるべき理想点を算出すると共に該理想点に対するマーク位置のずれを算出し、これらずれが所定の許容範囲内に収まるように上記可動支持部で上記本体の前後の2ヶ所を移動させる制御部とを備えたものである。
【0014】
上記制御部は、上記ずれが所定の許容範囲内に収まるように上記可動支持部で上記本体を移動させるとき、上記測量情報、傾斜情報、上記本体の寸法情報及び上記マークの取付位置情報から上記可動支持部で支持される本体の支持位置を算出すると共に、該支持位置と前後方向の位置が同じで、かつ、左右に離間された2点の仮想計測点を算出し、上記計画線上に上記エレクタ部の中心を位置させると共に上記エレクタ部の向きを上記計画線の接線方向に向けるために上記仮想計測点が移動されるべき仮想理想点を算出し、該仮想理想点と上記仮想計測点とのずれを減少させるように上記可動支持部で上記支持位置を移動させるとよい。
【0015】
上記可動支持部が、上記台車に前後左右に離間して設けられ、上記本体を昇降させる垂直ジャッキを有すると共に該垂直ジャッキを左右にスライドさせる水平ジャッキを有する水平・垂直調整装置からなり、上記制御部は、上記本体を移動させるとき上記水平・垂直調整装置で上記本体の前後左右の支持位置を同時に上下左右に移動させるとよい。
【発明の効果】
【0016】
本発明によれば、既設セグメントに過大な荷重が作用するのを防ぐことができると共に、既設セグメントに対してエレクタ部を精度良く位置合わせすることができる
【図面の簡単な説明】
【0017】
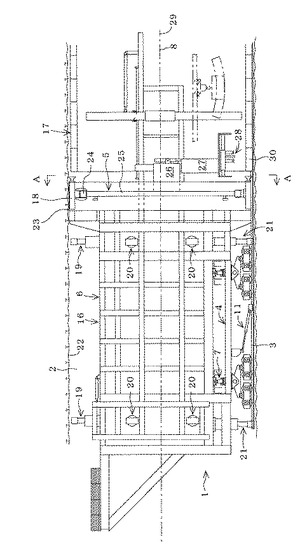
【図1】図1は自走式エレクタの側面図である。
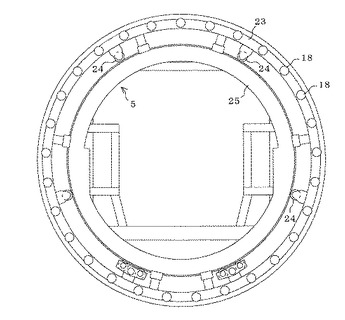
【図2】図2は図1のA−A線矢視図である。
【図3】図3は台車の正面図である。
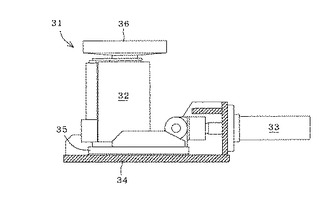
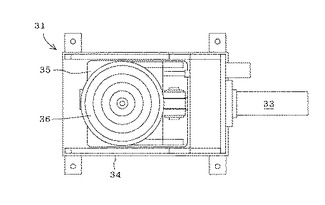
【図4】図4は図3の要部拡大図である。
【図5】図5は図4の平面図である。
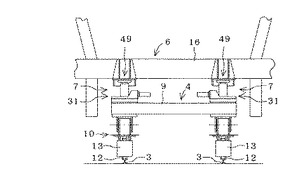
【図6】図6は図1の要部拡大図である。
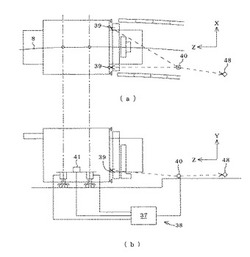
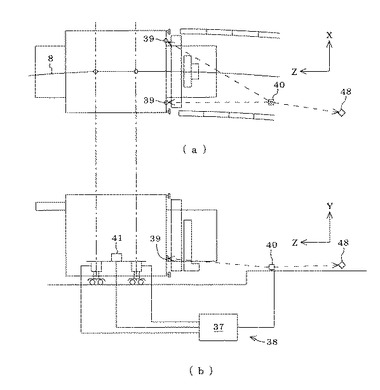
【図7】図7は自走式エレクタの本体の測量方法を説明する説明図であり、(a)は自走式エレクタの平面説明図であり、(b)は自走式エレクタの側面説明図である。
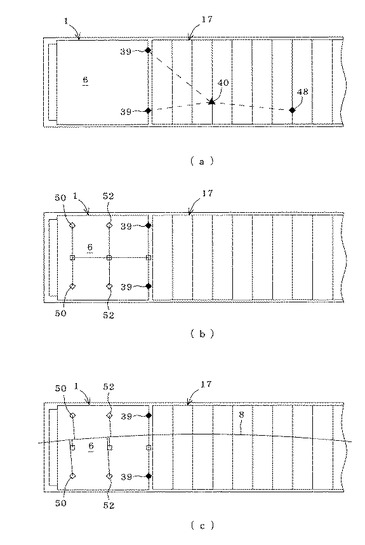
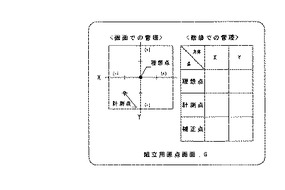
【図8】図8は自走式エレクタの位置制御方法を説明する平面説明図であり、(a)は測量中の自走式エレクタを示し、(b)は調整用の仮想計測点を計算中の自走式エレクタを示し、(c)は仮想計測点が移動されるべき仮想理想点と仮想理想点とのずれを計算中の自走式エレクタを示す。
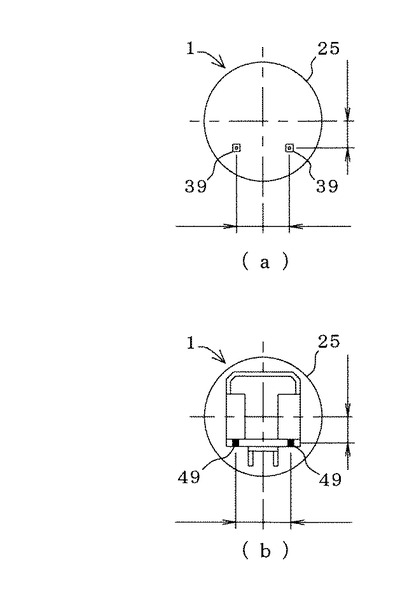
【図9】図9(a)はマークの位置を示す自走式エレクタの背面図であり、図9(b)は水平・垂直調整装置の位置を示す自走式エレクタの背面断面図である。
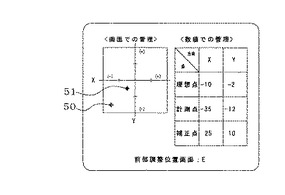
【図10】図10は前部調整位置の位置情報を出力するディスプレイ画面の正面図である。
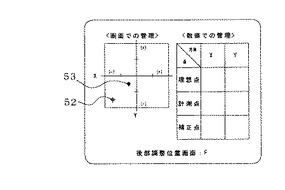
【図11】図11は後部調整位置の位置情報を出力するディスプレイ画面の正面図である。
【図12】図12は組立用原点位置の位置情報を出力するディスプレイ画面の正面図である。
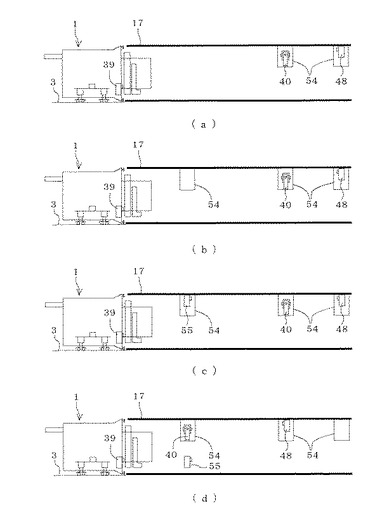
【図13】図13は(a)〜(d)の順に行う測量器の盛り変え手順を示すトンネルの側面説明図である。
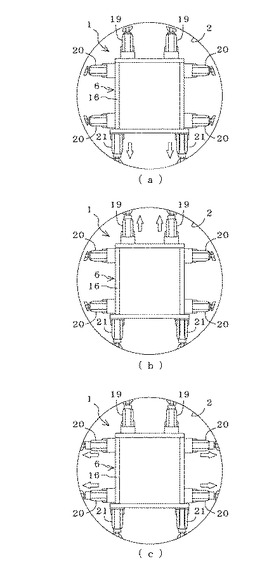
【図14】図14はトンネル穴に本体を固定する手順を示す自走式エレクタの背面説明図である。
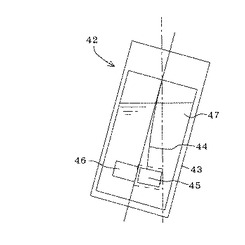
【図15】傾斜角センサーの正面説明図である。
【発明を実施するための形態】
【0018】
以下に、本発明を実施するための形態を添付図面に基いて説明する。
【0019】
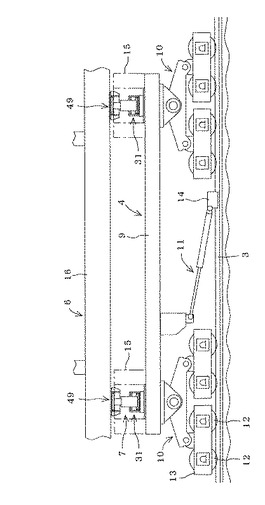
図1に示すように、自走式エレクタ1は、トンネル穴2内に敷設されたレール3上に前後走行可能に設置された台車4と、台車4上に載置され前後に延びると共に後部にセグメント組立用のエレクタ部5を有する本体6と、台車4上に設けられ本体6の前後に離間する2ヶ所を上下左右に位置調節可能に支持する可動支持部7とを備える。
【0020】
トンネル穴2は、トンネルの構築が計画される計画線8と同軸上に手掘り或いは機械掘りにより掘削される。
【0021】
図1、図3及び図6に示すように、台車4は、前後左右に延びて形成される平面視矩形状のフレーム台9と、フレーム台9に鉛直軸回り回転自在かつ左右に延びる軸回り回動自在に設けられた車輪ユニット10と、フレーム台9に設けられレール3から反力を取ってフレーム台9に推進力を発生させる移動用ジャッキ11とを備える。車輪ユニット10は複数の車輪12を支持フレーム13に回転自在に設けてなる。移動用ジャッキ11は、一端をフレーム台9に回動可能に連結されると共に他端にレール3を把持、開放するクランプ機構14を有し、レール3を開放して伸張状態から収縮し、レール3を把持して収縮状態から伸張することにより台車4を図1の左方向へ前進させるようになっている。フレーム台9には、本体6を載置するための載置台15が前後左右に離間して複数設けられる。
【0022】
本体6は、前後に延びる角筒状に形成されたフレーム部16と、フレーム部16の後部に設けられたエレクタ部5と、既設セグメント17の先端を後方に押し付ける押付ジャッキ18とを備える。フレーム部16は、H型鋼等の型鋼を格子状に接合した鉄骨構造とされている。フレーム部16の前部と後部には、本体6を地山に固定するためのグリッパ19、20、21が設けられる。グリッパ19、20、21は、フレーム部16の上部に上方に延びて設けられた上部グリッパ19と、フレーム部16の左右両側部に側方に延びて設けられた側部グリッパ20と、フレーム部16の下部に下方に延びて設けられた下部グリッパ21とからなる。上部グリッパ19と側部グリッパ20と下部グリッパ21はそれぞれ延長方向に伸縮自在なジャッキからなり、伸長することでトンネル穴2の上下の内壁22間と左右の内壁22間とで突っ張るようになっている。また、フレーム部16の後部には、エレクタ部5を回転自在に支持する支持リング部23が形成されている。図1及び図2に示すように、エレクタ部5は、支持リング部23の内周に複数のローラ24を介して回転可能に設けられた回転リング25と、回転リング25に後方に突出して設けられた腕部26と、腕部26にトンネル穴2の径方向に移動可能に設けられた吊りビーム27と、吊りビーム27に前後方向に移動可能に設けられたセグメント把持部28とを備える。回転リング25は、フレーム部16の前後に延びる中心軸29と同軸上に配置されており、中心軸29回りに回転するようになっている。押付ジャッキ18は、支持リング部23の内周に沿って複数設けられており、組み立てたセグメント30をそれぞれ後方に押すことでセグメント30間の弾性材からなるシール(図示せず)を押し潰し、セグメント30間の止水性を高めるようになっている。
【0023】
図3及び図6に示すように、可動支持部7は、フレーム台9上に前後左右に離間して設けられ本体6を昇降自在かつ左右にスライド自在に支持する水平・垂直調整装置31からなる。図4及び図5に示すように、水平・垂直調整装置31は、本体6を昇降させる垂直ジャッキ32と、垂直ジャッキ32を左右にスライドさせる水平ジャッキ33とを有する。水平ジャッキ33は、取付盤34を介してフレーム台9上に設けられる。垂直ジャッキ32は、取付盤34上でスライドするスライド盤35上に設けられる。スライド盤35には水平ジャッキ33が設けられ水平ジャッキ33が伸縮することでスライド盤35が取付盤34上で左右方向にスライドするようになっている。また、垂直ジャッキ32の上端にはフレーム部16の底面に当接されるシュー36が設けられている。水平・垂直調整装置31は、垂直ジャッキ32を縮退させたときシュー36の高さを載置台15より低くするように形成されると共に、垂直ジャッキ32を伸長させたとき載置台15よりシュー36の高さを高くするように形成されている。各水平・垂直調整装置31の垂直ジャッキ32と水平ジャッキ33はそれぞれ独立して伸縮できるようになっており、本体6の前後左右の支持位置49を上下左右に自由に移動できるようになっている。それぞれの垂直ジャッキ32と水平ジャッキ33には、ジャッキの伸長長さを計測するストロークセンサ(図示せず)が設けられており、ジャッキの長さ情報を常に後述する制御部37に送るようになっている。図9(b)に示すように、中心軸29に対する支持位置49の位置は、予め計測されており、制御部37に入力されている。
【0024】
エレクタ部5の位置合わせをするための位置制御装置38は、エレクタ部5の中心(すなわち回転リング25の中心)が計画線8上に位置されると共にエレクタ部5が計画線8の接線方向を向くように(中心軸29が計画線8の接線方向を向くように)可動支持部7を制御する。
【0025】
具体的には、位置制御装置38は、エレクタ部5近傍の本体6に左右に離間して設けられた複数のマーク39と、マーク39より後方のトンネル内に設けられマーク39の位置を測量する測量器40と、本体6に設けられ本体6の傾斜角度を測定する傾斜角検出器41と、傾斜角検出器41から得られる本体6の傾斜情報、測量器40から得られるマーク39の測量情報、本体6の寸法情報及びマーク39の取付位置情報から計画線8上にエレクタ部5の中心を位置させるためにマーク39が移動されるべき理想点を算出すると共に理想点に対するマーク位置のずれを算出し、これらずれが所定の許容範囲内に収まるように可動支持部7で本体6の前後の2ヶ所を移動させる制御部37とを備えて構成される。2ヶ所とは、前側の支持位置49と後側の支持位置49である。
【0026】
マーク39は、LEDを有する自己発光式のターゲットからなり、水平・垂直調整装置31と略同じ高さ、同じ左右位置に2つ配置される。図9(a)に示すように、中心軸29に対するマーク39の取付位置は、予め計測されており、制御部37に入力されている。
【0027】
測量器40は、レーザトランシッドからなり、LEDの光を探知してLEDまでの距離と基準となる位置からの角度を検出する自動追尾型となっている。測量器40は、所定時間ごとにマーク39を探知してマーク39の位置を制御部37に送信するようになっている。
【0028】
傾斜角検出器41は、ローリング方向(左右方向)の傾斜角度を検出するローリング用傾斜角センサ(図示せず)とピッチング方向(前後方向)の傾斜角度を検出するピッチング用傾斜角センサ(図示せず)とを内蔵する。図15に示すように、傾斜角センサ42は、ケース43内に板バネ44を介して揺動自在に吊持されたマグネット45と、ケース43に設けられマグネット45に臨む磁気抵抗素子46と、マグネット45の位置で磁気抵抗素子46の抵抗比変化を得る等価回路(図示せず)と、ケース43内に収容されたダンパーオイル47とを有し、等価回路からの電気信号の変化で傾斜角度を検出するようになっている。
【0029】
制御部37は、コンピュータからなり、測量器40とストロークセンサからの情報等を基に水平・垂直調整装置31の垂直ジャッキ32及び水平ジャッキ33を伸縮制御するようになっている。
【0030】
次に自走式エレクタ1の位置制御方法と作用について述べる。なお、制御部37では常にプログラムが実行されており、後述する各種位置等の計算と水平・垂直調整装置31の駆動制御は全て制御部37が上記プログラムに基づいて行うものである。
【0031】
1リング分のセグメント30を組み立てた自走式エレクタ1を前方のセグメント組立位置に調整する場合、所定の走行準備をしたのち、移動用ジャッキ11のクランプ機構14でレール3を把持し、移動用ジャッキ11を伸長させて自走式エレクタ1をセグメント1リング分前進させる。走行準備は、押付ジャッキ18を全て縮退させたのち、側部グリッパ20を縮退させると共に上部グリッパ19を縮退させ、各水平・垂直調整装置31の垂直ジャッキ32を伸長させて水平・垂直調整装置31上に本体6の荷重を載荷し、下部グリッパ21を縮退させることで行う。これにより、トンネル穴2に固定されていた自走式エレクタ1をトンネル穴2から離脱でき走行可能な状態にできる。
【0032】
この後、エレクタ部5の中心が計画線8上に位置されると共に、エレクタ部5の中心軸29が計画線8の接線方向を向くように本体6の芯出し調整(位置調整)を行う。
【0033】
芯出し調整は、マーク39の位置を測量すると共に本体6の傾斜角度を計測し、かつ、計画線8上にエレクタ部5の中心を位置させると共にエレクタ部5の中心軸29を計画線8の接線方向に向けるためにマーク39が移動されるべき理想点を算出し、理想点に対するマーク位置のずれを算出し、これらずれが所定の許容範囲内に収まるように本体6の前後の2ヶ所を移動させることで行う。許容範囲は、約50mmである。
【0034】
図7(a)、(b)及び図8(a)に示すように、マーク39の位置の測量は、まず、マーク39より後方のトンネル内に測量器40を設けると共に測量器40より後方の基準となる位置にバックターゲット48を設け、測量器40にバックターゲット48に対するマーク39の相対位置を自動的に計測させ、これら相対位置情報から制御部37がマーク39の三次元座標を算出することで行う。このとき、測量器40の左右方向のX座標、上下方向のY座標及び前後方向のZ座標は予め明確となっており、バックターゲット48の三次元座標も予め明確となっているため、測量器40がバックターゲット48を探し、バックターゲット48に照準を合わせたのち、水平方向と上下方向に回動してマーク39を探し、それぞれのマーク39に照準を合わせることでバックターゲット48からそれぞれのマーク39までの水平方向の回動角度(水平角)を計測できると共に鉛直方向の回動角度(仰角)を計測でき、かつ、測量器40からそれぞれのマーク39までの距離を計測できる。
【0035】
本体6の傾斜角度の測定は、傾斜角検出器41にてピッチング方向の傾斜角度とローリング方向の傾斜角度を検出することで行う。
【0036】
理想点の算出は、計画線8上にエレクタ部5の中心が位置されると共にエレクタ部5の中心軸29が計画線8の接線方向を向くと仮定したときのマーク39の位置を計画線8の位置情報と、本体6の寸法情報と、マーク39の取付位置情報とから算出することで行う。具体的には、本体6の寸法情報は、エレクタ部5の中心を基点とする各部の座標であり、少なくとも本体6が水平・垂直調整装置31により支持されるそれぞれの支持位置49の座標を含む。
【0037】
理想点に対するマーク位置のずれが許容範囲内に収まるように本体6の前後の2ヶ所を移動させる動作は、本体6の支持位置49を可動支持部7で所定の位置に移動させることで行う。具体的には、図8(b)、(c)に示すように、本体6の支持位置49が存在している前後方向の位置(Z座標)を算出すると共に、支持位置49と前後方向の位置(Z座標)が同じで、かつ、左右に離間された2点、具体的には、マーク39の座標のうちZ座標のみを本体6の支持位置49とした左右の2点(以下、仮想計測点という)をそれぞれ算出し、計画線8上にエレクタ部5の中心を位置させるために2つの仮想計測点が移動されるべき仮想理想点の座標をそれぞれ算出し、これら仮想理想点の座標と仮想計測点の座標とのずれを減少させるように支持位置49を可動支持部7で移動させることで行う。図10に示すように、本体6の前側の支持位置(前部調整位置)49の仮想計測点50と仮想理想点51は、グラフ及び表として制御部37のディスプレイ画面に表示される。図11に示すように、本体6の後側の支持位置(後部調整位置)49の仮想計測点52と仮想理想点53は、グラフ及び表として制御部37の他のディスプレイ画面に表示される。図12に示すように、マーク(組立用原点)39の計測点と理想点は、グラフ及び表として制御部37のさらに他のディスプレイ画面に表示される。
【0038】
また、支持位置49の移動は、仮想計測点50、52と仮想理想点51、53のずれ量に100パーセントより小さな正のゲイン値、具体的には、50%〜90%のゲイン値を掛け、複数回に分けて行う。具体的には、マーク39を測量したのち、傾斜角度を測定し、理想点を算出し、理想点と計測点のずれを算出し、ずれ量にゲイン値を掛けた距離だけ本体6を移動させるという一連の動作を数回繰り返して本体6の前後左右の4つの支持位置49を徐々に仮想理想点51、53に近接させる。このとき、それぞれの支持位置49での水平方向のずれ量と垂直方向のずれ量とが別々に算出されており、水平・垂直調整装置31は支持位置49の水平方向の移動を水平ジャッキ33で行い、支持位置49の垂直方向の移動を垂直ジャッキ32で行うようになっているため、4つの支持位置49を同時に、かつ、それぞれの支持位置49を水平方向と垂直方向に同時に移動させることができ、容易かつ迅速にエレクタ部5のセンタリングができる。
【0039】
このようにして本体6の位置合わせが完了したら、図14(a)に示すように、下部グリッパ21を伸長させ、図14(b)に示すように、上部グリッパ19を伸長させ、図14(c)に示すように、左右の側部グリッパ20を伸長させることで本体6をトンネル穴2に固定する。また、万一グリッパ19、20、21を張り出した後で心ずれが発見された場合、グリッパ19、20、21で位置修正しようとするとグリッパ19、20、21に過剰な荷重が作用する虞があるため、一旦全てのグリッパ19、20、21を縮退させて本体6を再度可動支持部7上に載置し、上述と同様の手順で位置調整操作を行う。
【0040】
図13(a)に示すように、自走式エレクタ1が走行し、測量器40で測量できる距離を超えたり、カーブにより測量器40からマーク39を確認できない状態となったら、バックターゲット48と測量器40を前方位置に盛り換える。具体的には、図13(b)に示すように、自走式エレクタ1の近傍のトンネル内に新しい架台54を設置し、図13(c)に示すように、新しい架台54上に盛り換え作業用のターゲット55を設け、このターゲット55の位置をバックターゲット48を基準として測量し、図13(d)に示すように、新しい架台54上に測量器40を移設すると共に測量器40が設置されていた架台54にバックターゲット48を移設する。
【0041】
このように、エレクタ部5近傍の本体6に複数のマーク39を左右に離間して設け、マーク39より後方のトンネル内からマーク39の位置を測量すると共に本体6の傾斜角度を測定し、これら測量情報、傾斜情報、本体6の寸法情報及びマーク39の取付位置情報から計画線8上にエレクタ部5の中心を位置させるためにマーク39が移動されるべき理想点を算出すると共に理想点に対するマーク位置のずれを算出し、これらずれが所定の許容範囲内に収まるように可動支持部7で本体6の前後の2ヶ所を移動させるため、既設セグメント17に過大な荷重が作用するのを防ぐことができると共に、既設セグメント17に対してエレクタ部5を精度良く容易に位置合わせすることができる。
【0042】
また、ずれが所定の許容範囲内に収まるように水平・垂直調整装置31で本体6を移動させるとき、測量情報、傾斜情報、本体6の寸法情報及びマーク39の取付位置情報から可動支持部7で支持される本体6の支持位置49を算出すると共に、前後方向の位置が支持位置49と同じで、かつ、左右に離間された2点の仮想計測点50、52を算出し、計画線8上にエレクタ部5の中心を位置させるために仮想計測点50、52が移動されるべき仮想理想点51、53を算出し、仮想理想点51、53と仮想計測点50、52とのずれを減少させるように可動支持部7で支持位置49を移動させるものとしたため、簡単な制御で確実に回転リング25の中心を計画線8上に近接できると共にエレクタ部5の中心軸29を計画線8の接線方向に向けることができる。
【0043】
仮想理想点51、53と仮想計測点50、52とのずれを減少させるように支持位置49を移動させるとき、ずれ量に100パーセントより小さな正のゲイン値を掛け、複数回に分けて支持位置49を移動させるため、仮想理想点51、53と仮想計測点50、52のずれを段階的に小さくでき、確実に支持位置49を仮想理想点51、53に近接できる。
【0044】
可動支持部7が、台車4に前後左右に離間して設けられ、本体6を昇降させる垂直ジャッキ32を有すると共に垂直ジャッキ32を左右にスライドさせる水平ジャッキ33を有する水平・垂直調整装置31からなり、本体6を移動させるとき、水平・垂直調整装置31で本体6の前後左右の支持位置49をそれぞれ同時に上下左右に移動させるため、本体6の位置合わせを迅速に行うことができる。
【0045】
なお、仮想計測点50、52は、マーク39の座標のうちZ座標のみを本体6の支持位置49とした点としたがこれに限るものではない、Z座標が本体6の支持位置49と同じで、かつ、左右に離間されている任意の2点であればよく、支持位置49であってもよい。
【0046】
また、支持位置49と同じZ座標の仮想計測点は左右に離間した2点としたが、3点以上の複数の点であってもよく、1点であってもよい。1点とする場合、仮想計測点はZ座標が本体6の支持位置49と同じである中心軸29上の点にするとよい。この場合も上述と同様に仮想理想点を算出し、仮想計測点と仮想理想点のずれを減少させるように水平・垂直調整装置31を制御するとよい。またこの制御のみではローリング角度の調整はなされないため、ローリング角度については別途補正するとよい。
【符号の説明】
【0047】
1 自走式エレクタ
2 トンネル穴
3 レール
4 台車
5 エレクタ部
6 本体
7 可動支持部
8 計画線
31 水平・垂直調整装置
32 垂直ジャッキ
33 水平ジャッキ
37 制御部
39 マーク
40 測量器
41 傾斜角検出器
49 支持位置
50 仮想計測点
51 仮想理想点
52 仮想計測点
53 仮想理想点
【技術分野】
【0001】
本発明は、トンネルの構築が計画される計画線上に掘削されたトンネル穴内を走行しつつトンネル穴の内壁に沿ってセグメントを組み立てる自走式エレクタの位置制御方法及び位置制御装置に関するものである。
【背景技術】
【0002】
自走式エレクタとしては、特許文献1に記載のものが知られている。この自走式エレクタは、既設セグメント上を走行する台車部と台車部に走行方向前方に延びて設けられセグメントを組み立てるエレクタ部とを備える。
【0003】
この自走式エレクタは、手掘り或いは機械掘りにより形成したトンネル穴内にセグメントを組み立てることのできる画期的なものであったが、装置全体の荷重が既設セグメントに作用し、既設セグメントの耐久性を低下させる虞があった。このため、かかる課題を解決するために新たな構造の自走式エレクタを現在開発中(未公開)である。
【0004】
この開発中の自走式エレクタは、掘削した地山(トンネル穴内)に敷設されたレール上を走行する台車と、この台車上に設けられエレクタ部を有する本体とから主に構成され、既設セグメント前方のレール上を走行することにより既設セグメントに過大な荷重を作用させないようになっている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−223260号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、この自走式エレクタは、地山に敷設されたレール上を走行するものであるため、レールを精度良く敷設することが困難であり、エレクタ部をトンネルの中心に位置合わせするのが困難であるという課題があった。
【0007】
また、カーブ施工時には、台車が既設セグメントより前方にあるため、既設セグメントの向きとエレクタ部の向きとが一致せず、既設セグメントに対するエレクタ部のずれ量が所定の許容範囲(約50mm)内に収まらない可能性があるという課題があった。
【0008】
そこで、本発明の目的は、上記課題を解決し、既設セグメントに過大な荷重が作用するのを防ぐことができると共に、既設セグメントに対してエレクタ部を精度良く位置合わせすることができる自走式エレクタの位置制御方法と位置制御装置を提供することにある。
【課題を解決するための手段】
【0009】
上記課題を解決するために本発明は、トンネルの構築が計画される計画線上に掘削されたトンネル穴内にレールを敷設し、該レール上に台車を前後走行可能に設置し、該台車上に、前後に延び、かつ、後部にセグメント組立用のエレクタ部を有する本体を載置すると共に、該本体の少なくとも前後に離間する2ヶ所を上下左右に位置調節可能に支持する可動支持部を設け、上記エレクタ部の中心が上記計画線上に位置され、かつ、上記エレクタ部が上記計画線の接線方向を向くように上記可動支持部を制御する自走式エレクタの位置制御方法であって、上記エレクタ部近傍の本体に複数のマークを左右に離間して設け、該マークより後方のトンネル内からマークの位置を測量すると共に上記本体の傾斜角度を測定し、これら測量情報、傾斜情報、上記本体の寸法情報及び上記マークの取付位置情報から上記計画線上に上記エレクタ部の中心を位置させると共に上記エレクタ部の向きを上記計画線の接線方向に向けるために上記マークが移動されるべき理想点を算出すると共に該理想点に対するマーク位置のずれを算出し、これらずれが所定の許容範囲内に収まるように上記可動支持部で上記本体の前後の2ヶ所を移動させるものである。
【0010】
上記ずれが所定の許容範囲内に収まるように上記可動支持部で上記本体を移動させるとき、上記測量情報、傾斜情報、上記本体の寸法情報及び上記マークの取付位置情報から上記可動支持部で支持される本体の支持位置を算出すると共に、該支持位置と前後方向の位置が同じで、かつ、左右に離間された2点の仮想計測点を算出し、上記計画線上に上記エレクタ部の中心を位置させると共に上記エレクタ部の向きを上記計画線の接線方向に向けるために上記仮想計測点が移動されるべき仮想理想点を算出し、該仮想理想点と上記仮想計測点とのずれを減少させるように上記可動支持部で上記支持位置を移動させるとよい。
【0011】
上記仮想理想点と上記仮想計測点とのずれを減少させるように上記支持位置を移動させるとき、ずれ量に100パーセントより小さな正のゲイン値を掛け、複数回に分けて上記支持位置を移動させるとよい。
【0012】
上記可動支持部が、上記台車に前後左右に離間して設けられ、上記本体を昇降させる垂直ジャッキを有すると共に該垂直ジャッキを左右にスライドさせる水平ジャッキを有する水平・垂直調整装置からなり、上記本体を移動させるとき、上記水平・垂直調整装置で上記本体の前後左右の支持位置をそれぞれ同時に上下左右に移動させるとよい。
【0013】
また、トンネルの構築が計画される計画線上に掘削されたトンネル穴内にレールを敷設し、該レール上に台車を前後走行可能に設置し、該台車上に、前後に延び、かつ、後部にセグメント組立用のエレクタ部を有する本体を載置すると共に、該本体の少なくとも前後に離間する2ヶ所を上下左右に位置調節可能に支持する可動支持部を設け、上記エレクタ部の中心が上記計画線上に位置され、かつ、上記エレクタ部が上記計画線の接線方向を向くように上記可動支持部を制御する自走式エレクタの位置制御装置であって、上記エレクタ部近傍の本体に左右に離間して設けられた複数のマークと、該マークより後方のトンネル内に設けられマークの位置を測量する測量器と、上記本体に設けられ本体の傾斜角度を測定する傾斜角検出器と、該傾斜角検出器から得られる傾斜情報、上記測量器から得られる測量情報、上記本体の寸法情報及び上記マークの取付位置情報から上記計画線上に上記エレクタ部の中心を位置させると共に上記エレクタ部の向きを上記計画線の接線方向に向けるために上記マークが移動されるべき理想点を算出すると共に該理想点に対するマーク位置のずれを算出し、これらずれが所定の許容範囲内に収まるように上記可動支持部で上記本体の前後の2ヶ所を移動させる制御部とを備えたものである。
【0014】
上記制御部は、上記ずれが所定の許容範囲内に収まるように上記可動支持部で上記本体を移動させるとき、上記測量情報、傾斜情報、上記本体の寸法情報及び上記マークの取付位置情報から上記可動支持部で支持される本体の支持位置を算出すると共に、該支持位置と前後方向の位置が同じで、かつ、左右に離間された2点の仮想計測点を算出し、上記計画線上に上記エレクタ部の中心を位置させると共に上記エレクタ部の向きを上記計画線の接線方向に向けるために上記仮想計測点が移動されるべき仮想理想点を算出し、該仮想理想点と上記仮想計測点とのずれを減少させるように上記可動支持部で上記支持位置を移動させるとよい。
【0015】
上記可動支持部が、上記台車に前後左右に離間して設けられ、上記本体を昇降させる垂直ジャッキを有すると共に該垂直ジャッキを左右にスライドさせる水平ジャッキを有する水平・垂直調整装置からなり、上記制御部は、上記本体を移動させるとき上記水平・垂直調整装置で上記本体の前後左右の支持位置を同時に上下左右に移動させるとよい。
【発明の効果】
【0016】
本発明によれば、既設セグメントに過大な荷重が作用するのを防ぐことができると共に、既設セグメントに対してエレクタ部を精度良く位置合わせすることができる
【図面の簡単な説明】
【0017】
【図1】図1は自走式エレクタの側面図である。
【図2】図2は図1のA−A線矢視図である。
【図3】図3は台車の正面図である。
【図4】図4は図3の要部拡大図である。
【図5】図5は図4の平面図である。
【図6】図6は図1の要部拡大図である。
【図7】図7は自走式エレクタの本体の測量方法を説明する説明図であり、(a)は自走式エレクタの平面説明図であり、(b)は自走式エレクタの側面説明図である。
【図8】図8は自走式エレクタの位置制御方法を説明する平面説明図であり、(a)は測量中の自走式エレクタを示し、(b)は調整用の仮想計測点を計算中の自走式エレクタを示し、(c)は仮想計測点が移動されるべき仮想理想点と仮想理想点とのずれを計算中の自走式エレクタを示す。
【図9】図9(a)はマークの位置を示す自走式エレクタの背面図であり、図9(b)は水平・垂直調整装置の位置を示す自走式エレクタの背面断面図である。
【図10】図10は前部調整位置の位置情報を出力するディスプレイ画面の正面図である。
【図11】図11は後部調整位置の位置情報を出力するディスプレイ画面の正面図である。
【図12】図12は組立用原点位置の位置情報を出力するディスプレイ画面の正面図である。
【図13】図13は(a)〜(d)の順に行う測量器の盛り変え手順を示すトンネルの側面説明図である。
【図14】図14はトンネル穴に本体を固定する手順を示す自走式エレクタの背面説明図である。
【図15】傾斜角センサーの正面説明図である。
【発明を実施するための形態】
【0018】
以下に、本発明を実施するための形態を添付図面に基いて説明する。
【0019】
図1に示すように、自走式エレクタ1は、トンネル穴2内に敷設されたレール3上に前後走行可能に設置された台車4と、台車4上に載置され前後に延びると共に後部にセグメント組立用のエレクタ部5を有する本体6と、台車4上に設けられ本体6の前後に離間する2ヶ所を上下左右に位置調節可能に支持する可動支持部7とを備える。
【0020】
トンネル穴2は、トンネルの構築が計画される計画線8と同軸上に手掘り或いは機械掘りにより掘削される。
【0021】
図1、図3及び図6に示すように、台車4は、前後左右に延びて形成される平面視矩形状のフレーム台9と、フレーム台9に鉛直軸回り回転自在かつ左右に延びる軸回り回動自在に設けられた車輪ユニット10と、フレーム台9に設けられレール3から反力を取ってフレーム台9に推進力を発生させる移動用ジャッキ11とを備える。車輪ユニット10は複数の車輪12を支持フレーム13に回転自在に設けてなる。移動用ジャッキ11は、一端をフレーム台9に回動可能に連結されると共に他端にレール3を把持、開放するクランプ機構14を有し、レール3を開放して伸張状態から収縮し、レール3を把持して収縮状態から伸張することにより台車4を図1の左方向へ前進させるようになっている。フレーム台9には、本体6を載置するための載置台15が前後左右に離間して複数設けられる。
【0022】
本体6は、前後に延びる角筒状に形成されたフレーム部16と、フレーム部16の後部に設けられたエレクタ部5と、既設セグメント17の先端を後方に押し付ける押付ジャッキ18とを備える。フレーム部16は、H型鋼等の型鋼を格子状に接合した鉄骨構造とされている。フレーム部16の前部と後部には、本体6を地山に固定するためのグリッパ19、20、21が設けられる。グリッパ19、20、21は、フレーム部16の上部に上方に延びて設けられた上部グリッパ19と、フレーム部16の左右両側部に側方に延びて設けられた側部グリッパ20と、フレーム部16の下部に下方に延びて設けられた下部グリッパ21とからなる。上部グリッパ19と側部グリッパ20と下部グリッパ21はそれぞれ延長方向に伸縮自在なジャッキからなり、伸長することでトンネル穴2の上下の内壁22間と左右の内壁22間とで突っ張るようになっている。また、フレーム部16の後部には、エレクタ部5を回転自在に支持する支持リング部23が形成されている。図1及び図2に示すように、エレクタ部5は、支持リング部23の内周に複数のローラ24を介して回転可能に設けられた回転リング25と、回転リング25に後方に突出して設けられた腕部26と、腕部26にトンネル穴2の径方向に移動可能に設けられた吊りビーム27と、吊りビーム27に前後方向に移動可能に設けられたセグメント把持部28とを備える。回転リング25は、フレーム部16の前後に延びる中心軸29と同軸上に配置されており、中心軸29回りに回転するようになっている。押付ジャッキ18は、支持リング部23の内周に沿って複数設けられており、組み立てたセグメント30をそれぞれ後方に押すことでセグメント30間の弾性材からなるシール(図示せず)を押し潰し、セグメント30間の止水性を高めるようになっている。
【0023】
図3及び図6に示すように、可動支持部7は、フレーム台9上に前後左右に離間して設けられ本体6を昇降自在かつ左右にスライド自在に支持する水平・垂直調整装置31からなる。図4及び図5に示すように、水平・垂直調整装置31は、本体6を昇降させる垂直ジャッキ32と、垂直ジャッキ32を左右にスライドさせる水平ジャッキ33とを有する。水平ジャッキ33は、取付盤34を介してフレーム台9上に設けられる。垂直ジャッキ32は、取付盤34上でスライドするスライド盤35上に設けられる。スライド盤35には水平ジャッキ33が設けられ水平ジャッキ33が伸縮することでスライド盤35が取付盤34上で左右方向にスライドするようになっている。また、垂直ジャッキ32の上端にはフレーム部16の底面に当接されるシュー36が設けられている。水平・垂直調整装置31は、垂直ジャッキ32を縮退させたときシュー36の高さを載置台15より低くするように形成されると共に、垂直ジャッキ32を伸長させたとき載置台15よりシュー36の高さを高くするように形成されている。各水平・垂直調整装置31の垂直ジャッキ32と水平ジャッキ33はそれぞれ独立して伸縮できるようになっており、本体6の前後左右の支持位置49を上下左右に自由に移動できるようになっている。それぞれの垂直ジャッキ32と水平ジャッキ33には、ジャッキの伸長長さを計測するストロークセンサ(図示せず)が設けられており、ジャッキの長さ情報を常に後述する制御部37に送るようになっている。図9(b)に示すように、中心軸29に対する支持位置49の位置は、予め計測されており、制御部37に入力されている。
【0024】
エレクタ部5の位置合わせをするための位置制御装置38は、エレクタ部5の中心(すなわち回転リング25の中心)が計画線8上に位置されると共にエレクタ部5が計画線8の接線方向を向くように(中心軸29が計画線8の接線方向を向くように)可動支持部7を制御する。
【0025】
具体的には、位置制御装置38は、エレクタ部5近傍の本体6に左右に離間して設けられた複数のマーク39と、マーク39より後方のトンネル内に設けられマーク39の位置を測量する測量器40と、本体6に設けられ本体6の傾斜角度を測定する傾斜角検出器41と、傾斜角検出器41から得られる本体6の傾斜情報、測量器40から得られるマーク39の測量情報、本体6の寸法情報及びマーク39の取付位置情報から計画線8上にエレクタ部5の中心を位置させるためにマーク39が移動されるべき理想点を算出すると共に理想点に対するマーク位置のずれを算出し、これらずれが所定の許容範囲内に収まるように可動支持部7で本体6の前後の2ヶ所を移動させる制御部37とを備えて構成される。2ヶ所とは、前側の支持位置49と後側の支持位置49である。
【0026】
マーク39は、LEDを有する自己発光式のターゲットからなり、水平・垂直調整装置31と略同じ高さ、同じ左右位置に2つ配置される。図9(a)に示すように、中心軸29に対するマーク39の取付位置は、予め計測されており、制御部37に入力されている。
【0027】
測量器40は、レーザトランシッドからなり、LEDの光を探知してLEDまでの距離と基準となる位置からの角度を検出する自動追尾型となっている。測量器40は、所定時間ごとにマーク39を探知してマーク39の位置を制御部37に送信するようになっている。
【0028】
傾斜角検出器41は、ローリング方向(左右方向)の傾斜角度を検出するローリング用傾斜角センサ(図示せず)とピッチング方向(前後方向)の傾斜角度を検出するピッチング用傾斜角センサ(図示せず)とを内蔵する。図15に示すように、傾斜角センサ42は、ケース43内に板バネ44を介して揺動自在に吊持されたマグネット45と、ケース43に設けられマグネット45に臨む磁気抵抗素子46と、マグネット45の位置で磁気抵抗素子46の抵抗比変化を得る等価回路(図示せず)と、ケース43内に収容されたダンパーオイル47とを有し、等価回路からの電気信号の変化で傾斜角度を検出するようになっている。
【0029】
制御部37は、コンピュータからなり、測量器40とストロークセンサからの情報等を基に水平・垂直調整装置31の垂直ジャッキ32及び水平ジャッキ33を伸縮制御するようになっている。
【0030】
次に自走式エレクタ1の位置制御方法と作用について述べる。なお、制御部37では常にプログラムが実行されており、後述する各種位置等の計算と水平・垂直調整装置31の駆動制御は全て制御部37が上記プログラムに基づいて行うものである。
【0031】
1リング分のセグメント30を組み立てた自走式エレクタ1を前方のセグメント組立位置に調整する場合、所定の走行準備をしたのち、移動用ジャッキ11のクランプ機構14でレール3を把持し、移動用ジャッキ11を伸長させて自走式エレクタ1をセグメント1リング分前進させる。走行準備は、押付ジャッキ18を全て縮退させたのち、側部グリッパ20を縮退させると共に上部グリッパ19を縮退させ、各水平・垂直調整装置31の垂直ジャッキ32を伸長させて水平・垂直調整装置31上に本体6の荷重を載荷し、下部グリッパ21を縮退させることで行う。これにより、トンネル穴2に固定されていた自走式エレクタ1をトンネル穴2から離脱でき走行可能な状態にできる。
【0032】
この後、エレクタ部5の中心が計画線8上に位置されると共に、エレクタ部5の中心軸29が計画線8の接線方向を向くように本体6の芯出し調整(位置調整)を行う。
【0033】
芯出し調整は、マーク39の位置を測量すると共に本体6の傾斜角度を計測し、かつ、計画線8上にエレクタ部5の中心を位置させると共にエレクタ部5の中心軸29を計画線8の接線方向に向けるためにマーク39が移動されるべき理想点を算出し、理想点に対するマーク位置のずれを算出し、これらずれが所定の許容範囲内に収まるように本体6の前後の2ヶ所を移動させることで行う。許容範囲は、約50mmである。
【0034】
図7(a)、(b)及び図8(a)に示すように、マーク39の位置の測量は、まず、マーク39より後方のトンネル内に測量器40を設けると共に測量器40より後方の基準となる位置にバックターゲット48を設け、測量器40にバックターゲット48に対するマーク39の相対位置を自動的に計測させ、これら相対位置情報から制御部37がマーク39の三次元座標を算出することで行う。このとき、測量器40の左右方向のX座標、上下方向のY座標及び前後方向のZ座標は予め明確となっており、バックターゲット48の三次元座標も予め明確となっているため、測量器40がバックターゲット48を探し、バックターゲット48に照準を合わせたのち、水平方向と上下方向に回動してマーク39を探し、それぞれのマーク39に照準を合わせることでバックターゲット48からそれぞれのマーク39までの水平方向の回動角度(水平角)を計測できると共に鉛直方向の回動角度(仰角)を計測でき、かつ、測量器40からそれぞれのマーク39までの距離を計測できる。
【0035】
本体6の傾斜角度の測定は、傾斜角検出器41にてピッチング方向の傾斜角度とローリング方向の傾斜角度を検出することで行う。
【0036】
理想点の算出は、計画線8上にエレクタ部5の中心が位置されると共にエレクタ部5の中心軸29が計画線8の接線方向を向くと仮定したときのマーク39の位置を計画線8の位置情報と、本体6の寸法情報と、マーク39の取付位置情報とから算出することで行う。具体的には、本体6の寸法情報は、エレクタ部5の中心を基点とする各部の座標であり、少なくとも本体6が水平・垂直調整装置31により支持されるそれぞれの支持位置49の座標を含む。
【0037】
理想点に対するマーク位置のずれが許容範囲内に収まるように本体6の前後の2ヶ所を移動させる動作は、本体6の支持位置49を可動支持部7で所定の位置に移動させることで行う。具体的には、図8(b)、(c)に示すように、本体6の支持位置49が存在している前後方向の位置(Z座標)を算出すると共に、支持位置49と前後方向の位置(Z座標)が同じで、かつ、左右に離間された2点、具体的には、マーク39の座標のうちZ座標のみを本体6の支持位置49とした左右の2点(以下、仮想計測点という)をそれぞれ算出し、計画線8上にエレクタ部5の中心を位置させるために2つの仮想計測点が移動されるべき仮想理想点の座標をそれぞれ算出し、これら仮想理想点の座標と仮想計測点の座標とのずれを減少させるように支持位置49を可動支持部7で移動させることで行う。図10に示すように、本体6の前側の支持位置(前部調整位置)49の仮想計測点50と仮想理想点51は、グラフ及び表として制御部37のディスプレイ画面に表示される。図11に示すように、本体6の後側の支持位置(後部調整位置)49の仮想計測点52と仮想理想点53は、グラフ及び表として制御部37の他のディスプレイ画面に表示される。図12に示すように、マーク(組立用原点)39の計測点と理想点は、グラフ及び表として制御部37のさらに他のディスプレイ画面に表示される。
【0038】
また、支持位置49の移動は、仮想計測点50、52と仮想理想点51、53のずれ量に100パーセントより小さな正のゲイン値、具体的には、50%〜90%のゲイン値を掛け、複数回に分けて行う。具体的には、マーク39を測量したのち、傾斜角度を測定し、理想点を算出し、理想点と計測点のずれを算出し、ずれ量にゲイン値を掛けた距離だけ本体6を移動させるという一連の動作を数回繰り返して本体6の前後左右の4つの支持位置49を徐々に仮想理想点51、53に近接させる。このとき、それぞれの支持位置49での水平方向のずれ量と垂直方向のずれ量とが別々に算出されており、水平・垂直調整装置31は支持位置49の水平方向の移動を水平ジャッキ33で行い、支持位置49の垂直方向の移動を垂直ジャッキ32で行うようになっているため、4つの支持位置49を同時に、かつ、それぞれの支持位置49を水平方向と垂直方向に同時に移動させることができ、容易かつ迅速にエレクタ部5のセンタリングができる。
【0039】
このようにして本体6の位置合わせが完了したら、図14(a)に示すように、下部グリッパ21を伸長させ、図14(b)に示すように、上部グリッパ19を伸長させ、図14(c)に示すように、左右の側部グリッパ20を伸長させることで本体6をトンネル穴2に固定する。また、万一グリッパ19、20、21を張り出した後で心ずれが発見された場合、グリッパ19、20、21で位置修正しようとするとグリッパ19、20、21に過剰な荷重が作用する虞があるため、一旦全てのグリッパ19、20、21を縮退させて本体6を再度可動支持部7上に載置し、上述と同様の手順で位置調整操作を行う。
【0040】
図13(a)に示すように、自走式エレクタ1が走行し、測量器40で測量できる距離を超えたり、カーブにより測量器40からマーク39を確認できない状態となったら、バックターゲット48と測量器40を前方位置に盛り換える。具体的には、図13(b)に示すように、自走式エレクタ1の近傍のトンネル内に新しい架台54を設置し、図13(c)に示すように、新しい架台54上に盛り換え作業用のターゲット55を設け、このターゲット55の位置をバックターゲット48を基準として測量し、図13(d)に示すように、新しい架台54上に測量器40を移設すると共に測量器40が設置されていた架台54にバックターゲット48を移設する。
【0041】
このように、エレクタ部5近傍の本体6に複数のマーク39を左右に離間して設け、マーク39より後方のトンネル内からマーク39の位置を測量すると共に本体6の傾斜角度を測定し、これら測量情報、傾斜情報、本体6の寸法情報及びマーク39の取付位置情報から計画線8上にエレクタ部5の中心を位置させるためにマーク39が移動されるべき理想点を算出すると共に理想点に対するマーク位置のずれを算出し、これらずれが所定の許容範囲内に収まるように可動支持部7で本体6の前後の2ヶ所を移動させるため、既設セグメント17に過大な荷重が作用するのを防ぐことができると共に、既設セグメント17に対してエレクタ部5を精度良く容易に位置合わせすることができる。
【0042】
また、ずれが所定の許容範囲内に収まるように水平・垂直調整装置31で本体6を移動させるとき、測量情報、傾斜情報、本体6の寸法情報及びマーク39の取付位置情報から可動支持部7で支持される本体6の支持位置49を算出すると共に、前後方向の位置が支持位置49と同じで、かつ、左右に離間された2点の仮想計測点50、52を算出し、計画線8上にエレクタ部5の中心を位置させるために仮想計測点50、52が移動されるべき仮想理想点51、53を算出し、仮想理想点51、53と仮想計測点50、52とのずれを減少させるように可動支持部7で支持位置49を移動させるものとしたため、簡単な制御で確実に回転リング25の中心を計画線8上に近接できると共にエレクタ部5の中心軸29を計画線8の接線方向に向けることができる。
【0043】
仮想理想点51、53と仮想計測点50、52とのずれを減少させるように支持位置49を移動させるとき、ずれ量に100パーセントより小さな正のゲイン値を掛け、複数回に分けて支持位置49を移動させるため、仮想理想点51、53と仮想計測点50、52のずれを段階的に小さくでき、確実に支持位置49を仮想理想点51、53に近接できる。
【0044】
可動支持部7が、台車4に前後左右に離間して設けられ、本体6を昇降させる垂直ジャッキ32を有すると共に垂直ジャッキ32を左右にスライドさせる水平ジャッキ33を有する水平・垂直調整装置31からなり、本体6を移動させるとき、水平・垂直調整装置31で本体6の前後左右の支持位置49をそれぞれ同時に上下左右に移動させるため、本体6の位置合わせを迅速に行うことができる。
【0045】
なお、仮想計測点50、52は、マーク39の座標のうちZ座標のみを本体6の支持位置49とした点としたがこれに限るものではない、Z座標が本体6の支持位置49と同じで、かつ、左右に離間されている任意の2点であればよく、支持位置49であってもよい。
【0046】
また、支持位置49と同じZ座標の仮想計測点は左右に離間した2点としたが、3点以上の複数の点であってもよく、1点であってもよい。1点とする場合、仮想計測点はZ座標が本体6の支持位置49と同じである中心軸29上の点にするとよい。この場合も上述と同様に仮想理想点を算出し、仮想計測点と仮想理想点のずれを減少させるように水平・垂直調整装置31を制御するとよい。またこの制御のみではローリング角度の調整はなされないため、ローリング角度については別途補正するとよい。
【符号の説明】
【0047】
1 自走式エレクタ
2 トンネル穴
3 レール
4 台車
5 エレクタ部
6 本体
7 可動支持部
8 計画線
31 水平・垂直調整装置
32 垂直ジャッキ
33 水平ジャッキ
37 制御部
39 マーク
40 測量器
41 傾斜角検出器
49 支持位置
50 仮想計測点
51 仮想理想点
52 仮想計測点
53 仮想理想点
【特許請求の範囲】
【請求項1】
トンネルの構築が計画される計画線上に掘削されたトンネル穴内にレールを敷設し、該レール上に台車を前後走行可能に設置し、該台車上に、前後に延び、かつ、後部にセグメント組立用のエレクタ部を有する本体を載置すると共に、該本体の少なくとも前後に離間する2ヶ所を上下左右に位置調節可能に支持する可動支持部を設け、上記エレクタ部の中心が上記計画線上に位置され、かつ、上記エレクタ部が上記計画線の接線方向を向くように上記可動支持部を制御する自走式エレクタの位置制御方法であって、上記エレクタ部近傍の本体に複数のマークを左右に離間して設け、該マークより後方のトンネル内からマークの位置を測量すると共に上記本体の傾斜角度を測定し、これら測量情報、傾斜情報、上記本体の寸法情報及び上記マークの取付位置情報から上記計画線上に上記エレクタ部の中心を位置させると共に上記エレクタ部の向きを上記計画線の接線方向に向けるために上記マークが移動されるべき理想点を算出すると共に該理想点に対するマーク位置のずれを算出し、これらずれが所定の許容範囲内に収まるように上記可動支持部で上記本体の前後の2ヶ所を移動させることを特徴とする自走式エレクタの位置制御方法。
【請求項2】
上記ずれが所定の許容範囲内に収まるように上記可動支持部で上記本体を移動させるとき、上記測量情報、傾斜情報、上記本体の寸法情報及び上記マークの取付位置情報から上記可動支持部で支持される本体の支持位置を算出すると共に、該支持位置と前後方向の位置が同じで、かつ、左右に離間された2点の仮想計測点を算出し、上記計画線上に上記エレクタ部の中心を位置させると共に上記エレクタ部の向きを上記計画線の接線方向に向けるために上記仮想計測点が移動されるべき仮想理想点を算出し、該仮想理想点と上記仮想計測点とのずれを減少させるように上記可動支持部で上記支持位置を移動させる請求項1記載の自走式エレクタの位置制御方法。
【請求項3】
上記仮想理想点と上記仮想計測点とのずれを減少させるように上記支持位置を移動させるとき、ずれ量に100パーセントより小さな正のゲイン値を掛け、複数回に分けて上記支持位置を移動させる請求項1又は2記載の自走式エレクタの位置制御方法。
【請求項4】
上記可動支持部が、上記台車に前後左右に離間して設けられ、上記本体を昇降させる垂直ジャッキを有すると共に該垂直ジャッキを左右にスライドさせる水平ジャッキを有する水平・垂直調整装置からなり、上記本体を移動させるとき、上記水平・垂直調整装置で上記本体の前後左右の支持位置をそれぞれ同時に上下左右に移動させる請求項1〜3のいずれかに記載の自走式エレクタの位置制御方法。
【請求項5】
トンネルの構築が計画される計画線上に掘削されたトンネル穴内にレールを敷設し、該レール上に台車を前後走行可能に設置し、該台車上に、前後に延び、かつ、後部にセグメント組立用のエレクタ部を有する本体を載置すると共に、該本体の少なくとも前後に離間する2ヶ所を上下左右に位置調節可能に支持する可動支持部を設け、上記エレクタ部の中心が上記計画線上に位置され、かつ、上記エレクタ部が上記計画線の接線方向を向くように上記可動支持部を制御する自走式エレクタの位置制御装置であって、上記エレクタ部近傍の本体に左右に離間して設けられた複数のマークと、該マークより後方のトンネル内に設けられマークの位置を測量する測量器と、上記本体に設けられ本体の傾斜角度を測定する傾斜角検出器と、該傾斜角検出器から得られる傾斜情報、上記測量器から得られる測量情報、上記本体の寸法情報及び上記マークの取付位置情報から上記計画線上に上記エレクタ部の中心を位置させると共に上記エレクタ部の向きを上記計画線の接線方向に向けるために上記マークが移動されるべき理想点を算出すると共に該理想点に対するマーク位置のずれを算出し、これらずれが所定の許容範囲内に収まるように上記可動支持部で上記本体の前後の2ヶ所を移動させる制御部とを備えたことを特徴とする自走式エレクタの位置制御装置。
【請求項6】
上記制御部は、上記ずれが所定の許容範囲内に収まるように上記可動支持部で上記本体を移動させるとき、上記測量情報、傾斜情報、上記本体の寸法情報及び上記マークの取付位置情報から上記可動支持部で支持される本体の支持位置を算出すると共に、該支持位置と前後方向の位置が同じで、かつ、左右に離間された2点の仮想計測点を算出し、上記計画線上に上記エレクタ部の中心を位置させると共に上記エレクタ部の向きを上記計画線の接線方向に向けるために上記仮想計測点が移動されるべき仮想理想点を算出し、該仮想理想点と上記仮想計測点とのずれを減少させるように上記可動支持部で上記支持位置を移動させる請求項5記載の自走式エレクタの位置制御装置。
【請求項7】
上記可動支持部が、上記台車に前後左右に離間して設けられ、上記本体を昇降させる垂直ジャッキを有すると共に該垂直ジャッキを左右にスライドさせる水平ジャッキを有する水平・垂直調整装置からなり、上記制御部は、上記本体を移動させるとき上記水平・垂直調整装置で上記本体の前後左右の支持位置を同時に上下左右に移動させる請求項5又は6記載の自走式エレクタの位置制御装置。
【請求項1】
トンネルの構築が計画される計画線上に掘削されたトンネル穴内にレールを敷設し、該レール上に台車を前後走行可能に設置し、該台車上に、前後に延び、かつ、後部にセグメント組立用のエレクタ部を有する本体を載置すると共に、該本体の少なくとも前後に離間する2ヶ所を上下左右に位置調節可能に支持する可動支持部を設け、上記エレクタ部の中心が上記計画線上に位置され、かつ、上記エレクタ部が上記計画線の接線方向を向くように上記可動支持部を制御する自走式エレクタの位置制御方法であって、上記エレクタ部近傍の本体に複数のマークを左右に離間して設け、該マークより後方のトンネル内からマークの位置を測量すると共に上記本体の傾斜角度を測定し、これら測量情報、傾斜情報、上記本体の寸法情報及び上記マークの取付位置情報から上記計画線上に上記エレクタ部の中心を位置させると共に上記エレクタ部の向きを上記計画線の接線方向に向けるために上記マークが移動されるべき理想点を算出すると共に該理想点に対するマーク位置のずれを算出し、これらずれが所定の許容範囲内に収まるように上記可動支持部で上記本体の前後の2ヶ所を移動させることを特徴とする自走式エレクタの位置制御方法。
【請求項2】
上記ずれが所定の許容範囲内に収まるように上記可動支持部で上記本体を移動させるとき、上記測量情報、傾斜情報、上記本体の寸法情報及び上記マークの取付位置情報から上記可動支持部で支持される本体の支持位置を算出すると共に、該支持位置と前後方向の位置が同じで、かつ、左右に離間された2点の仮想計測点を算出し、上記計画線上に上記エレクタ部の中心を位置させると共に上記エレクタ部の向きを上記計画線の接線方向に向けるために上記仮想計測点が移動されるべき仮想理想点を算出し、該仮想理想点と上記仮想計測点とのずれを減少させるように上記可動支持部で上記支持位置を移動させる請求項1記載の自走式エレクタの位置制御方法。
【請求項3】
上記仮想理想点と上記仮想計測点とのずれを減少させるように上記支持位置を移動させるとき、ずれ量に100パーセントより小さな正のゲイン値を掛け、複数回に分けて上記支持位置を移動させる請求項1又は2記載の自走式エレクタの位置制御方法。
【請求項4】
上記可動支持部が、上記台車に前後左右に離間して設けられ、上記本体を昇降させる垂直ジャッキを有すると共に該垂直ジャッキを左右にスライドさせる水平ジャッキを有する水平・垂直調整装置からなり、上記本体を移動させるとき、上記水平・垂直調整装置で上記本体の前後左右の支持位置をそれぞれ同時に上下左右に移動させる請求項1〜3のいずれかに記載の自走式エレクタの位置制御方法。
【請求項5】
トンネルの構築が計画される計画線上に掘削されたトンネル穴内にレールを敷設し、該レール上に台車を前後走行可能に設置し、該台車上に、前後に延び、かつ、後部にセグメント組立用のエレクタ部を有する本体を載置すると共に、該本体の少なくとも前後に離間する2ヶ所を上下左右に位置調節可能に支持する可動支持部を設け、上記エレクタ部の中心が上記計画線上に位置され、かつ、上記エレクタ部が上記計画線の接線方向を向くように上記可動支持部を制御する自走式エレクタの位置制御装置であって、上記エレクタ部近傍の本体に左右に離間して設けられた複数のマークと、該マークより後方のトンネル内に設けられマークの位置を測量する測量器と、上記本体に設けられ本体の傾斜角度を測定する傾斜角検出器と、該傾斜角検出器から得られる傾斜情報、上記測量器から得られる測量情報、上記本体の寸法情報及び上記マークの取付位置情報から上記計画線上に上記エレクタ部の中心を位置させると共に上記エレクタ部の向きを上記計画線の接線方向に向けるために上記マークが移動されるべき理想点を算出すると共に該理想点に対するマーク位置のずれを算出し、これらずれが所定の許容範囲内に収まるように上記可動支持部で上記本体の前後の2ヶ所を移動させる制御部とを備えたことを特徴とする自走式エレクタの位置制御装置。
【請求項6】
上記制御部は、上記ずれが所定の許容範囲内に収まるように上記可動支持部で上記本体を移動させるとき、上記測量情報、傾斜情報、上記本体の寸法情報及び上記マークの取付位置情報から上記可動支持部で支持される本体の支持位置を算出すると共に、該支持位置と前後方向の位置が同じで、かつ、左右に離間された2点の仮想計測点を算出し、上記計画線上に上記エレクタ部の中心を位置させると共に上記エレクタ部の向きを上記計画線の接線方向に向けるために上記仮想計測点が移動されるべき仮想理想点を算出し、該仮想理想点と上記仮想計測点とのずれを減少させるように上記可動支持部で上記支持位置を移動させる請求項5記載の自走式エレクタの位置制御装置。
【請求項7】
上記可動支持部が、上記台車に前後左右に離間して設けられ、上記本体を昇降させる垂直ジャッキを有すると共に該垂直ジャッキを左右にスライドさせる水平ジャッキを有する水平・垂直調整装置からなり、上記制御部は、上記本体を移動させるとき上記水平・垂直調整装置で上記本体の前後左右の支持位置を同時に上下左右に移動させる請求項5又は6記載の自走式エレクタの位置制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2010−285750(P2010−285750A)
【公開日】平成22年12月24日(2010.12.24)
【国際特許分類】
【出願番号】特願2009−138069(P2009−138069)
【出願日】平成21年6月9日(2009.6.9)
【出願人】(000000099)株式会社IHI (5,014)
【出願人】(000206211)大成建設株式会社 (1,602)
【Fターム(参考)】
【公開日】平成22年12月24日(2010.12.24)
【国際特許分類】
【出願日】平成21年6月9日(2009.6.9)
【出願人】(000000099)株式会社IHI (5,014)
【出願人】(000206211)大成建設株式会社 (1,602)
【Fターム(参考)】
[ Back to top ]